

Page 1

8023821/14W8/2019-07-10
SICK STEGMANN GmbH
Dürrheimer Str. 36
D-78166 Donaueschingen
www.sick.com
TTK50S/TTK70S
B E T R I E B S A N L E I T U N G d e
Sichere Motor-Feedback-Systeme
1 Zu diesem Dokument
Bitte lesen Sie diese Betriebsanleitung sorgfältig, bevor Sie mit dem sicheren
Motor-Feedback-System arbeiten, es montieren, in Betrieb nehmen oder warten.
Dieses Dokument ist eine Originalbetriebsanleitung.
1.1 Funktion dieses Dokuments
Diese Betriebsanleitung leitet das technische Personal des Maschinenherstellers
bzw. Maschinenbetreibers zur sicheren Montage, Elektroinstallation, Inbetrieb‐
nahme sowie zum Betrieb und zur Wartung des sicheren Motor-Feedback-Sys‐
tems an.
Diese Betriebsanleitung ist allen Personen zugänglich zu machen, die mit dem
sicheren Motor-Feedback-System arbeiten.
Darüber hinaus sind für die Planung und den Einsatz von sicherheitsgerichtete
Sensoren wie dem sicheren Motor-Feedback-System technische Fachkenntnisse
notwendig, die nicht in diesem Dokument vermittelt werden.
Grundsätzlich sind die behördlichen und gesetzlichen Vorschriften beim Betrieb
des sicheren Motor-Feedback-Systems einzuhalten.
1.2 Symbole und Dokumentkonventionen
WARNUNG
Ein Sicherheitshinweis weist Sie auf konkrete Vorgaben zur sicheren Montage
und Installation des sicheren Motor-Feedback-Systems hin.
Dies soll Sie vor Unfällen bewahren.
Lesen und befolgen Sie Sicherheitshinweise sorgfältig!
HINWEIS
Weist Sie auf nützliche Tipps und Empfehlungen hin.
Handlungsanweisungen sind durch einen Pfeil gekennzeichnet. Lesen und
b
befolgen Sie Handlungsanweisungen sorgfältig.
1.3 Zugehörige Dokumente
•
Implementierungshandbuch „HIPERFACE® Safety“ - 8014120, Stand
12.2010 (oder neuer)
•
Specification Hiperface® Motor feedback protocol - 8010701, Stand
04.2008 (oder neuer)
2 Zu Ihrer Sicherheit
Dieses Kapitel dient Ihrer Sicherheit und der Sicherheit der Anlagenbenutzer.
2.1 Grundlegende Sicherheitshinweise
Für Einbau und Verwendung des sicheren Motor-Feedback-Systems sowie für die
Inbetriebnahme und wiederkehrende technische Überprüfungen gelten die natio‐
nalen und internationalen Rechtsvorschriften, insbesondere:Für Einbau und Ver‐
wendung des sicheren Motor-Feedback-Systems sowie für die Inbetriebnahme
und wiederkehrende technische Überprüfungen gelten die nationalen und interna‐
tionalen Rechtsvorschriften, insbesondere:
•
Maschinenrichtlinie 2006/42/EG
•
Arbeitsmittelbenutzungsrichtlinie 2009/104/EG
•
Unfallverhütungsvorschriften und Sicherheitsregeln
•
sonstige relevante Sicherheitsregeln
Hersteller und Bediener der Maschine, an der das sichere Motor-Feedback-Sys‐
tem verwendet wird, müssen alle geltenden Sicherheitsvorschriften und –regeln
in eigener Verantwortung mit der für Sie zuständigen Behörde abstimmen und
einhalten.
Der Hersteller des verbundenen Antriebssystems muss bei der Auslegung des
Antriebssystems Sicherheitsanforderungen erfüllen, die im Implementierungs‐
handbuch „HIPERFACE® Safety“ - 8014120 beschrieben sind.
2.2 Bestimmungsgemäße Verwendung
Das sicherere Motor-Feedback-System ist aufgrund seiner Ausstattung zum dyna‐
mischen und präzisen Betrieb von Servo-Regelkreisen vorgesehen.
Das Gesamtsystem, bestehend aus Lesekopf, Maßverkörperung, Auswertesystem,
Servo-Umrichter und Motor, bildet einen Regelkreis.
Der sicherheitsgerichtete Einsatz von sicheren Motor-Feedback-Systemen mit
HIPERFACE®-Schnittstelle bezieht sich auf die Anwendung in Verbindung mit Line‐
armotoren.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 1
Folgende Informationen können aus den digitalen Positionssignalen des direkt an
der Motorwelle angekoppelten sicheren Motor-Feedback-Systems abgeleitet wer‐
den:
•
bei Linearmotoren die Drehzahl- oder Geschwindigkeitsinformation sowie die
Kommutierungsinformation.
Das sichere Motor-Feedback-System kann, in Kombination mit einem Antriebssys‐
tem gemäß IEC 61800-5-2, in Sicherheitsanwendungen bis Kategorie 3 und PL d
nach EN ISO 13849 oder SILCL2 nach EN 62061 eingesetzt werden.
Es erfüllt die Anforderungen der Maschinenrichtlinie 2006/42/EG und dient zur
Unterstützung des Antriebssystems bei der Gewährleistung von:
•
Sicherheitsfunktionen die auf der sicheren Positions- oder Geschwindigkeits‐
information des sicheren Motor-Feedback-Systems basieren.
•
Für Sicherheitsfunktionen, die auf der sicheren Absolut-Position basieren,
liefert das sichere Motor-Feedback-System beim Einschalten nur einen
Kanal ohne sicherheitsgerichtete Diagnose. Ein zweiter Kanal muss vom
Benutzer mit Hilfe anderer Maßnahmen realisiert werden. Dieser zweite
Kanal kann vom Benutzer bereitgestellt werden, indem die Position des
sicheren Motor-Feedback-Systems vor dem Ausschalten gespeichert und
beim nächsten Einschalten mit der Startposition des sicheren Motor-Feed‐
back-Systems verglichen wird. Nur bei Übereinstimmung der Werte kann die
Absolut-Position sicherheitsgerichtet verwendet werden. Andernfalls muss
vom Benutzer eine Referenzfahrt durchgeführt werden. Ohne zweiten Kanal
muss bei jedem Einschalten des sicheren Motor-Feedback-Systems eine
Referenzfahrt durchgeführt werden, um die Absolut-Position zu bestätigen.
Das sichere Motor-Feedback-System ist nicht in der Lage, eigenständig einen
sicheren Zustand des Antriebssystems herbeizuführen. Das Antriebssystem muss
den sicheren Zustand als Reaktion auf einen angezeigten Fehler des siche‐
ren Motor-Feedback-Systems herbeiführen.
Die Übermittlung der Sensorsignale zum Auswertesystem erfolgt über eine HIPER‐
FACE®-Schnittstelle. In Verbindung mit einem Antriebssystem Kategorie 3 (EN ISO
13849), SILCL2 (EN 62061) oder PL d (EN ISO 13849) eignet sich das sichere
Motor-Feedback-System für Sicherheitsanwendungen. Bei ausschließlicher Ver‐
wendung der analogen Inkrementalsignalausgänge (Sinus/Cosinus) für geschwin‐
digkeitsbasierte Sicherheitsfunktionen des Antriebs erfüllt das sichere MotorFeedback-System die Anforderung nach EN 61800-5-2.
Das sichere Motor-Feedback-System unterstützt keine sicherheitsgerichteten
Betriebsarten, die im Zusammenhang mit absoluter Lage oder absoluter Position
stehen.
Zur Erkennung aller unzulässigen Veränderungen in der Relation von Sinus und
Cosinus wird kontinuierlich die Vektorlängenüberwachung herangezogen. Beim
TTK50S/ TTK70S darf die Vektorlänge um max. +/- 15% abweichen (siehe Kapitel
6.2. Implementierungshandbuch „HIPERFACE® Safety“ - 8014120).
Eine größere Abweichung als +/-15% stellt eine Verletzung der Vektorlängengren‐
zen dar und verlangt eine entsprechende Fehlerreaktion des Antriebsreglers.
WARNUNG
Das sichere Motor-Feedback-System darf nur innerhalb der Grenzen der vor‐
geschriebenen und angegebenen technischen Daten, Maße und Toleranzen
der Maßbilder und Betriebsbedingungen verwendet werden; außerdem müs‐
sen angegebene Anzugsdrehmomente eingehalten werden.
Bei jeder anderen Verwendung sowie bei Veränderungen am Gerät – auch im
Rahmen von Montage und Installation – verfällt jeglicher Gewährleistungsan‐
spruch gegenüber der SICK STEGMANN GmbH.
2.3 Bestimmungswidrige Verwendung
Das sichere Motor-Feedback-System darf nur mit einem definierten Befestigungs‐
satz (2105618) montiert werden. Die Verbindung zwischen Antriebssystem und
sicherem Motor-Feedback-System muss starr ausgeführt werden.
Das sichere Motor-Feedback-System kann ohne zusätzliche Maßnahmen keine
Sicherheitsfunktionen unterstützen, welche auf der Absolut-Position basieren, die
auf dem RS 485-Parameterkanal übertragen werden.
Die mechanische Ankopplung des Messsystems an den Antrieb ist sicherheitsre‐
levant. Die Norm EN 61800-5-2, Tabelle D16, fordert hier einen Fehlerausschluss
bezüglich des Lösens der mechanischen Verbindung zwischen Messsystem und
Antrieb. Die Vorgaben zur Befestigung des Messsystems sind zu beachten.
Können in der Anwendung solche Anregungen nicht sicher ausgeschlossen wer‐
den, sind geeignete Tests des gesamten Antriebssystems durchzuführen.
2.4 Anforderungen an die Qualifikation des Personals
Das sichere Motor-Feedback-System TTK50S/TTK70S darf nur von befähigten
Personen montiert, in Betrieb genommen, geprüft, gewartet und verwendet wer‐
den.
Befähigt ist eine Person, wenn folgende Anforderungen erfüllt sind:
•
Geeignete technische Ausbildung des Personals
•
Unterweisung vom Maschinenbetreiber in der Bedienung und den gültigen
Sicherheitsrichtlinien
•
Zugriff auf diese Betriebsanleitung
3 Projektierung
WARNUNG
Die Versorgungsspannung muss aus PELV-Systemen (EN 50178) erzeugt
werden. Das sichere Motor-Feedback-System entspricht Schutzklasse III nach
DIN EN 61140. Wenn die Versorgungsspannung nicht aus PELV-Systemen
erzeugt wird, müssen benutzerseitig andere Maßnahmen ergriffen werden,
die eine sichere Trennung zu netzspannungsführenden Teilen gewährleisten.
4 Montage
Dieses Kapitel beschreibt die Durchführung der Montage des sicheren MotorFeedback-Systems.
Page 2
4.1 Sicherheit
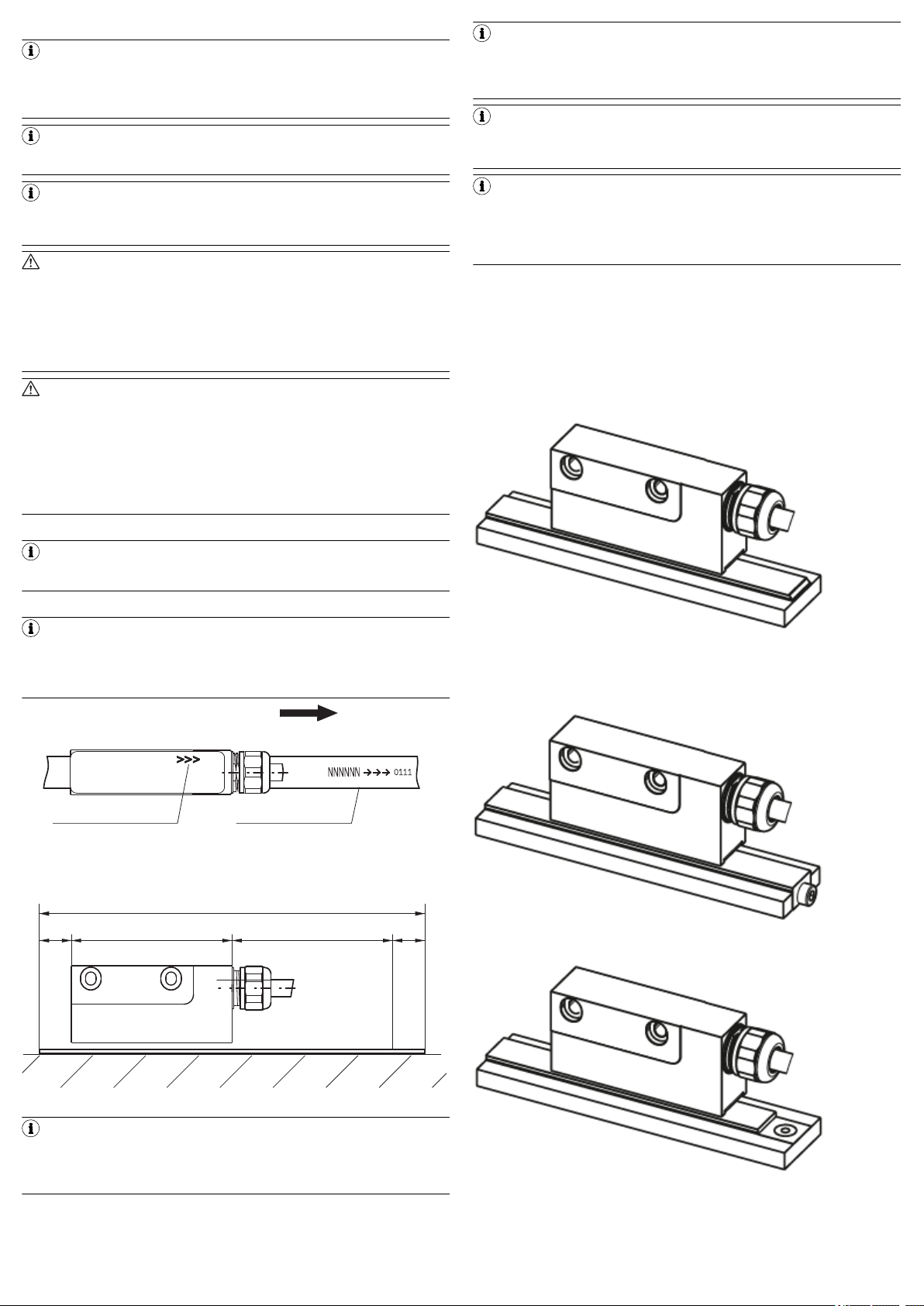
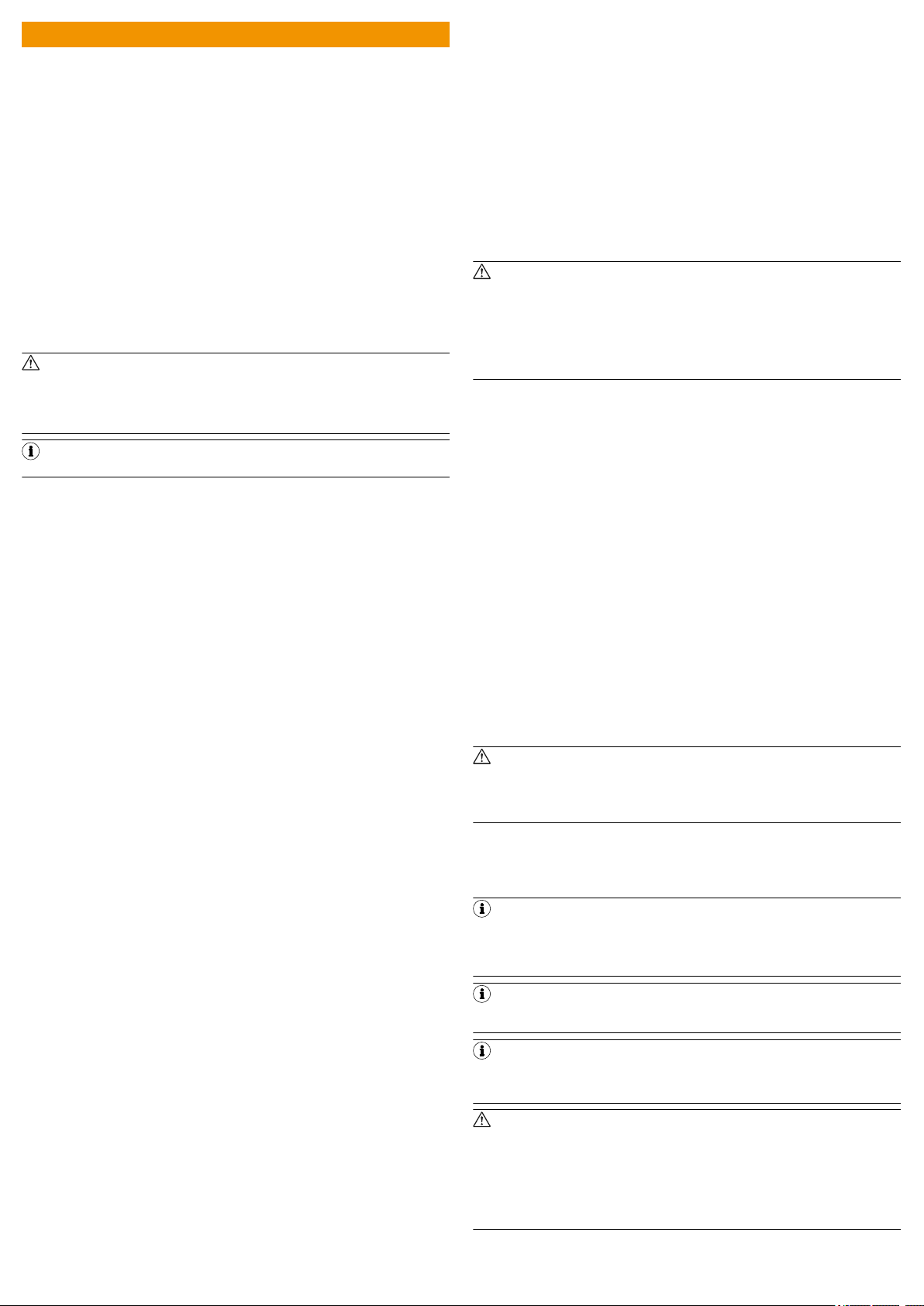
erf. Bandlänge = Messweg + 60 mm
Messweg5 550
Verfahrrichtung
Bedruckung auf Sensor
Bedruckung auf Band
HINWEIS
Die Montage darf nur gemäß der angegebenen IP-Schutzart vorgenommen
werden (siehe Technische Daten).
Das System muss ggf. zusätzlich gegen schädliche Umwelteinflüsse wie z. B.
Spritzwasser, Staub, Schläge, Temperatur geschützt werden.
HINWEIS
Während der Montage Schläge und Stöße auf das sichere Motor-FeedbackSystem vermeiden.
HINWEIS
Das sichere Motor-Feedback-System darf nur mit einem definierten Befesti‐
gungssatz (2105618 / 2109583) montiert werden. Damit ist eine Beschleu‐
nigung von <100 m/s² zulässig (siehe EN 61800-5.2, Tabelle D16).
WARNUNG
Die Beeinflussung durch magnetische Felder ist zu vermeiden. Insbesondere
dürfen keine Magnetfelder (z. B. Haftmagnete oder andere Dauermagnete) in
direkten Kontakt mit dem Magnetband geraten.
•
Fremdmagnetfelder > ca. 3 ... 4 kA/m (3.8 ... 5 mT) beeinflussen die
Messgenauigkeit.
•
Feldstärken >150 kA/m (>190 mT) verändern die Magnetisierung des
Magnetbandes irreversibel.
WARNUNG
Schrauben nur einmal verwenden. Nach der Demontage des sicheren MotorFeedback-Systems:
an der Verbindung zwischen Antriebssystem und sicherem Motor-Feed‐
b
back-System die betroffenen Gewinde von Reststoffen reinigen.
bei erneuter Montage neue (ungebrauchte) Schraube mit flüssiger
b
Schraubensicherung am Gewinde verwenden.
bei erneuter Montage muss der Befestigungssatz (2105618 /
b
2109583) bei SICK bezogen werden.
Demontage
HINWEIS
Ist eine Demontage des sicheren Motor-Feedback-Systems erforderlich, so
sind die Montageschritte in umgekehrter Reihenfolge durchzuführen.
HINWEIS
Um optimale Verklebungen zu erreichen, müssen alle antiadhäsiven Fremd‐
substanzen (Öl, Fett, Staub, usw.) durch möglichst rückstandslos verduns‐
tende Reinigungsmittel entfernt werden. Als Reinigungsmittel eignen sich
u. a. Ketone (Aceton) oder Alkohole.
HINWEIS
Die Klebeflächen müssen trocken sein und es ist mit höchstmöglichem
Anpressdruck zu verkleben. Die Verklebungstemperatur ist optimal zwischen
20 °C und 30 °C in trockenen Räumen.
HINWEIS
Bei Verklebung langer Bänder sollte die Schutzfolie des Klebebandes über
eine kurze Teilstrecke abgezogen werden, um das Band zu fixieren. Daraufhin
erfolgt das Ausrichten des Bandes. Nach der Ausrichtung kann über die restli‐
che Länge die Schutzfolie, unter gleichzeitigem Andruck des Bandes, seitlich
herausgezogen werden.
Befestigungsfläche sorgfältig reinigen.
b
Am Magnetband die Schutzfolie des Klebebandes entfernen.
b
Magnetband unter Berücksichtigung der Verfahrrichtung aufkleben.
b
Magnetbandoberfläche sorgfältig reinigen.
b
Am Abdeckband die Schutzfolie des Klebebandes entfernen.
b
Abdeckband aufkleben (an beiden Enden leicht überlappen lassen).
b
Die überlappenden Enden des Abdeckbandes gegen Ablösen sichern.
b
4.3 Montagebeispiele Magnetband
4.2 Montage Magnetband
HINWEIS
Aus technischen Gründen muss bei der Länge (gegenüber der Messstrecke)
ein Zumaß berücksichtigt werden:
•
TTK50S: ≥60 mm
•
TTK70S: ≥80 mm
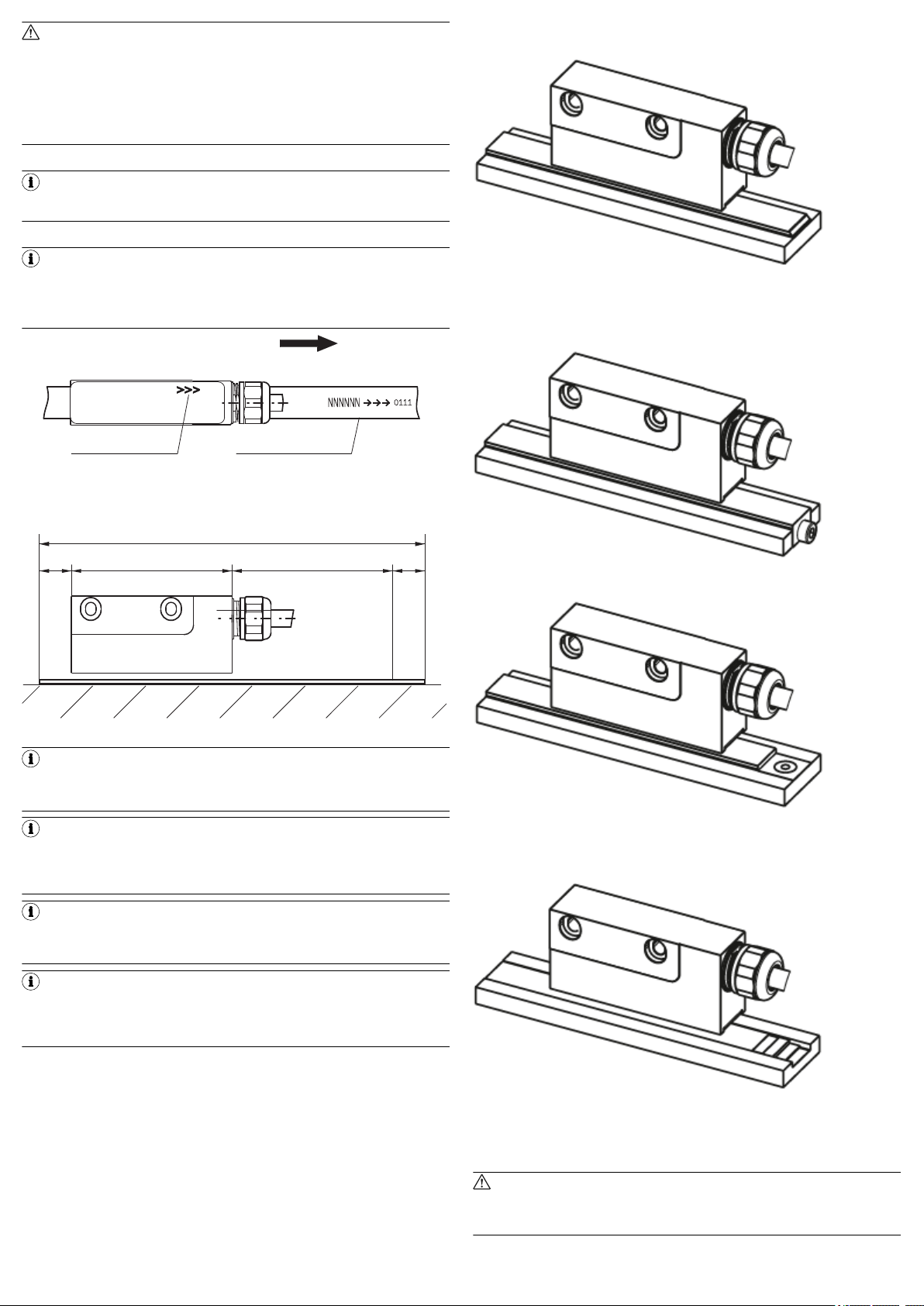
Abbildung 2: Montagebeispiel - Angeschrägtes Schutzband
Die einfache Montageart durch angeschrägtes Schutzband ist nur in sehr
geschützter Umgebung zu empfehlen.
Abbildung 3: Montagebeispiel - Magnetband, stirnseitig verschraubt
Abbildung 1: Montage Magnetband
HINWEIS
Die Montage muss plan zur Montagefläche bzw. der zu messenden Strecke
erfolgen. Welligkeiten verschlechtern immer die Messgenauigkeit. Es ist für
ausreichenden mechanischen Schutz zu sorgen (z. B. gegen Schläge und
Vibration).
Abbildung 4: Montagebeispiel - Magnetband, flächig verschraubt
Bei ungeschützter Umgebung besteht Abschälgefahr. In solchen Fällen sind Mon‐
tagearten mit stirnseitig oder flächig verschraubtem Magnetband geeigneter.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 2
Page 3
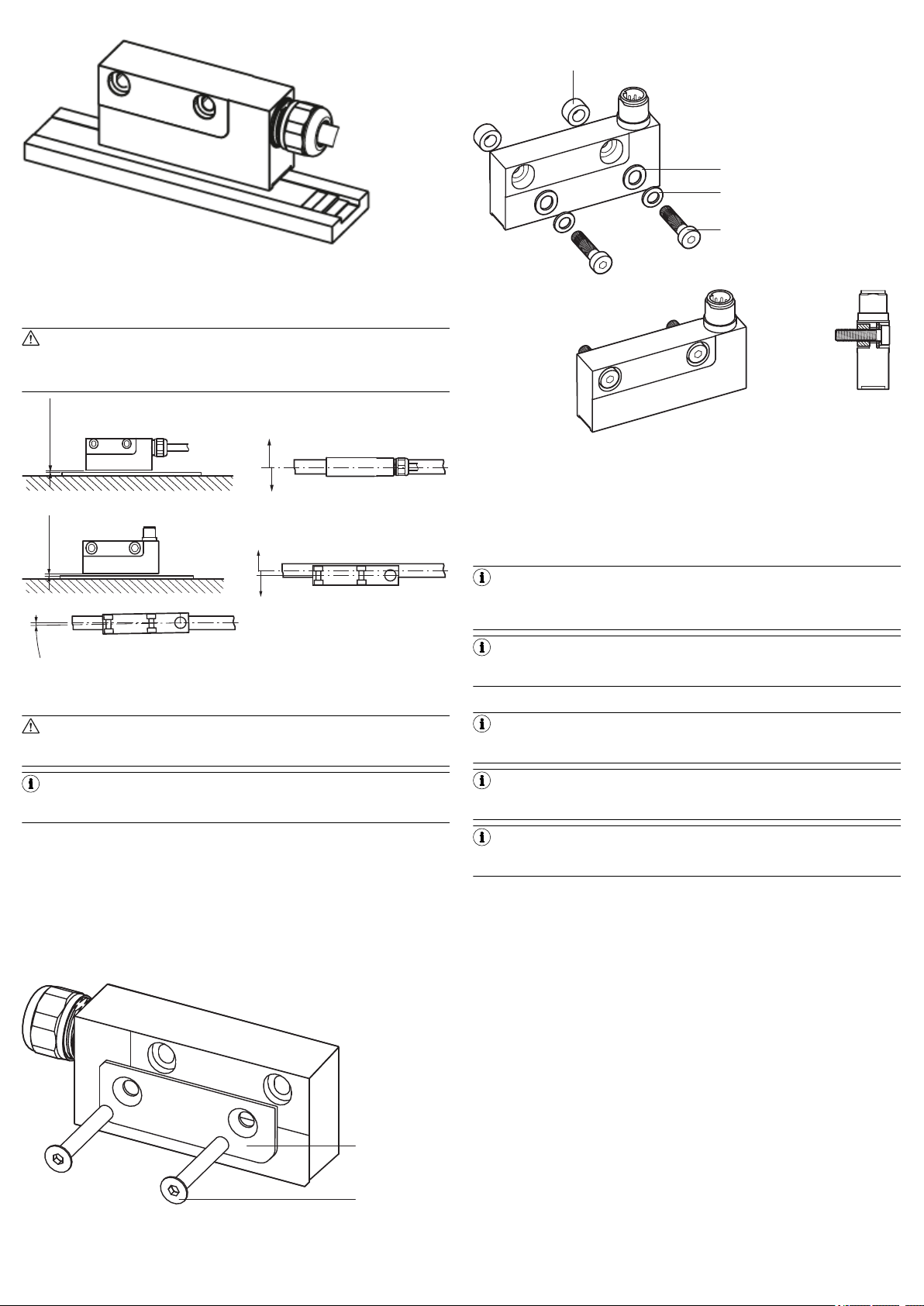
Abbildung 5: Montagebeispiel - Magnetband in einer Nut
0,6
0,6
≤ 0,3
≤ 0,2
1 2
0,2
0,4
≤ 0,3
≤ 0,2
1 2
< ± 1°
2
1
1
2
3
4
Den optimalen Schutz bietet die Montage in einer Nut, die so tief sein sollte, dass
das Magnetband vollständig darin eingebettet werden kann.
4.4 Montage Lesekopf
WARNUNG
Die Toleranz- und Abstandsmaße müssen über die gesamte Messstrecke ein‐
gehalten werden. Größere Montageabweichungen führen zu unplausiblen
Positionswerten.
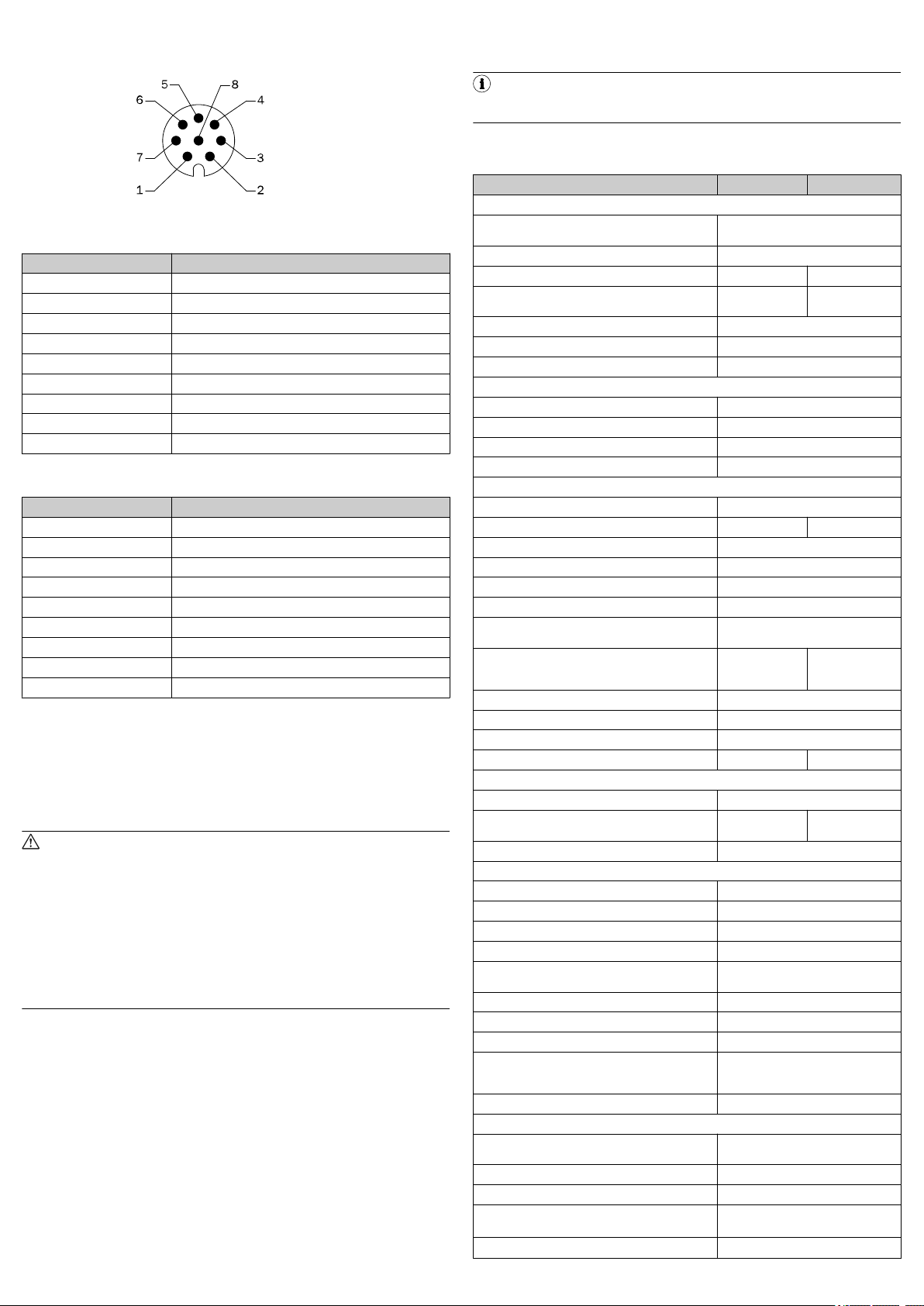
Abbildung 6: Montagetoleranzen TTK50S
3. Senkkopfschrauben (2) mit Schraubensicherung sichern.
4. Senkkopfschrauben festziehen. Anzugsdrehmoment: 1,41 ± 0,1 Nm.
Abbildung 9: Montage Lesekopf TTK70S
1. Titanschraube (4), Sicherungsscheibe (3), Scheibe (2) und Buchse (1) wie
abgebildet montieren.
2. Mit Hilfe der Abstandslehre den Sensor-/Band-Abstand überprüfen.
3. Schraube mit Schraubensicherung sichern.
4. Titanschrauben festziehen. Anzugsdrehmoment: 2,5 ± 0,1 Nm.
5 Elektrische Installation
HINWEIS
Für die Installation des sicheren Motor-Feedback-Systems die entsprechende
Betriebsanleitung des externen Antriebssystems bzw. der übergeordneten
Steuerung beachten!
HINWEIS
Abbildung 7: Montagetoleranzen TTK70S
1
2
Die Lage des Sensors zum Magnetband ist genau definiert. Bei der Montage ist
insbesondere zu beachten, dass über die gesamte Messstrecke zwischen Band
und Sensor ein Luftspalt eingehalten wird, unabhängig davon, ob das Band oder
der Sensor bewegt wird. Als Montagehilfe kann die beiliegende Abstandslehre ver‐
wendet werden.
Die Montage des Lesekopfes TTK50S darf ausschließlich mit dem Befestigungs‐
satz (2109583) erfolgen. Der Befestigungssatz besteht aus einer Montageplatte
und zwei Senkkopfschrauben.
Die Montage des Lesekopfes TTK70S darf ausschließlich mit dem Befestigungs‐
satz (2105618) erfolgen. Der Befestigungssatz besteht jeweils aus zwei Titan‐
schrauben, Sicherungsscheiben, Buchsen und Scheiben.
Ohne Abdeckband
Mit Abdeckband
WARNUNG
Sobald das Abdeckband aufgebracht wurde, ist der Bandaufdruck nicht mehr
sichtbar. Es wird empfohlen, das Abdeckband entsprechend zu markieren.
HINWEIS
Die Pfeilrichtung des Sensoraufdruckes muss mit der Pfeilrichtung des Band‐
aufdruckes übereinstimmen.
Abbildung 8: Montage Lesekopf TTK50S
1. Senkkopfschraube (2) und Montageplatte (1) wie abgebildet montieren.
2. Mit Hilfe der Abstandslehre den Abstand von Sensor und Band überprüfen.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 3
Bei der Montage einen spannungsfreien Zustand an betroffenen Maschinen /
Anlagen sicherstellen!
5.1 Schirmanbindung
HINWEIS
Der Einsatzort ist so zu wählen, dass induktive oder kapazitive Störungen
nicht auf den Sensor oder dessen Anschlussleitung einwirken können.
HINWEIS
Für einen störungsfreien Betrieb ist eine geeignete Schirmanbindung des
Gebers an Masse bzw. an den Motorschirm des Motors erforderlich.
HINWEIS
Kabel mit Zugentlastung installieren. Wenn nötig Schleppkette oder Schutz‐
schlauch vorsehen.
5.2 Signale des sicheren Motor-Feedback-Systems
Das sichere Motor-Feedback-System verfügt über folgende Signale:
HIPERFACE®-Schnittstelle:
•
US – Versorgungsspannung; Betriebs-spannungsbereich liegt zwischen +7V
… +12V, empfohlene Versorgungsspannung +8V.
•
GND – Masseanschluss; galvanisch getrennt vom Gehäuse. Bezogene Span‐
nung ist US.
•
+SIN – Prozessdatenkanal, Sinussignal von 1 Vpp mit statischen Offset von
REFSIN.
•
REFSIN – Prozessdatenkanal; statische Spannung von +2,5V, Referenzspan‐
nung für +SIN.
•
+COS – Prozessdatenkanal; Conussignal von 1 Vpp mit statischen Offset von
REFCOS.
•
REFCOS – Prozessdatenkanal; statische Spannung von +2,5V, Referenz‐
spannung für +COS.
•
Daten ± – RS485-Parameterkanal: negatives / positives Datensignal; der
Parameterkanal ist eine asynchrone, halbduplexe Schnittstelle, die physika‐
lisch der EIA RS485-Spezifikation entspricht. Hierfür können durch verschie‐
dene Befehle Daten vom sicheren Motor-Feedback-System angefordert wer‐
den sowie anwenderspezifische Daten wie z. B. Positionsoffset im E2PROM
des sicheren Motor-Feedback-Systems abgespeichert werden.
Page 4
5.3 Anschlussübersicht
5.3.1 M12, 8-polig
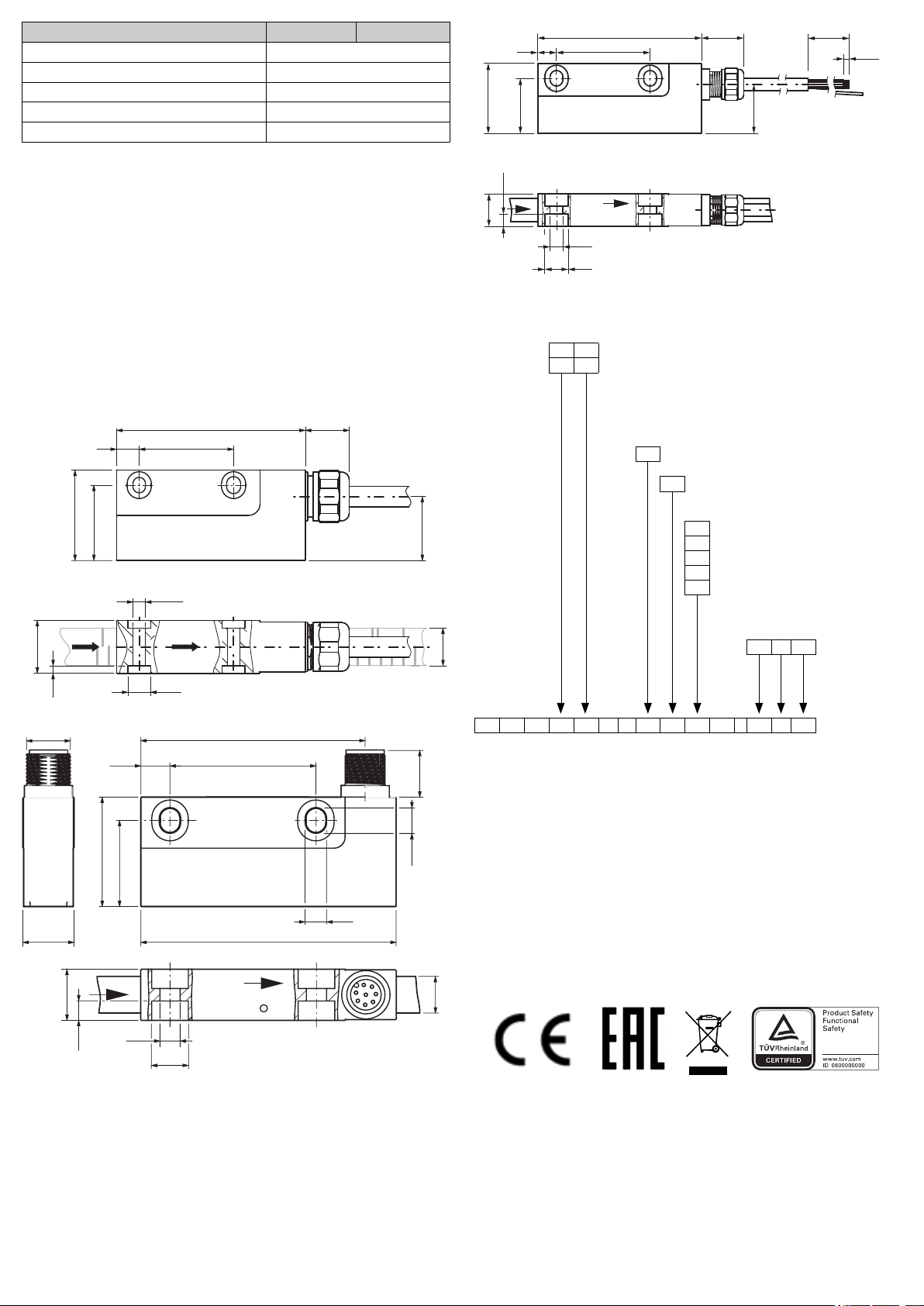
Abb. 6: Anschluss M12, 8-polig
PIN-Belegung M12, 8-polig
PIN Signal
1 REFSIN
2 +SIN
3 REFCOS
4 +COS
5 Daten +
6 Daten 7 GND
8 US
- Gehäusepotenzial, Schirmung über Gehäusestecker.
5.3.2 Kabelabgang
Leitungsbelegung Kabelabgang
Farbe der Ader Signal
Braun REFSIN
Weiß +SIN
Schwarz REFCOS
Rosa +COS
Grau Daten +
Grün Daten Blau GND
Rot US
Cu-Geflecht Schirm
6 Inbetriebnahme
Zur Inbetriebnahme des sicheren Motor-Feedback-Systems wird vorausgesetzt,
dass der Hersteller des verbundenen Antriebssystems bei der Auslegung des
Antriebssystems Sicherheitsanforderungen erfüllt hat, die im Implementierungs‐
handbuch „HIPERFACE® Safety“ - 8014120 beschrieben sind.
6.1 Prüfen
Im Betrieb sind keine weiteren prüfenden Maßnahmen erforderlich.
WARNUNG
Das sichere Motor-Feedback-System hat eine maximale Gebrauchsdauer
(siehe Technische Daten), nach der es in jedem Fall außer Verkehr gebracht
werden muss.
Hierbei ist neben der Gebrauchsdauer auch die Lagerlebensdauer zu beach‐
ten. Der Parameter, der applikationsabhängig zuerst erreicht wird, bestimmt
den Zeitpunkt der erforderlichen Außerbetriebnahme.
Das Baujahr des sicheren Motor-Feedback-Systems wird im Geräteetikett
bzw. im Verpackungsetikett in der Seriennummer (SN) codiert angegeben
(YYWW).
YY = bezeichnen das Jahr (ohne Jahrhundert).
WW = bezeichnen die Kalenderwoche des letzten Herstellungsprozesses.
7 Instandhaltung
Das sichere Motor-Feedback-System ist wartungsfrei. Bei Defekt ist keine Repara‐
turmöglichkeit vorgesehen. Bitte kontaktieren Sie uns bei Reklamationen.
Die Oberfläche des Magnetbandes kann bei starker Verschmutzung gelegentlich
mit einem weichen Lappen gereinigt werden.
8 Außerbetriebnahme
8.1 Umweltgerechtes Verhalten
Das sichere Motor-Feedback-System ist so konstruiert, dass es die Umwelt so
wenig wie möglich belastet. Es verbraucht nur ein Minimum an Energie und Res‐
sourcen.
Handeln Sie auch am Arbeitsplatz immer mit Rücksicht auf die Umwelt.
b
Beachten Sie deshalb die folgenden Informationen zur Entsorgung.
8.2 Entsorgung
Entsorgen Sie unbrauchbare oder irreparable Geräte immer gemäß den jeweils
gültigen landesspezifischen Abfallbeseitigungsvorschriften.
HINWEIS
Gerne sind wir Ihnen bei der Entsorgung dieser Geräte behilflich. Sprechen
Sie uns an.
9 Technische Daten
Technische Daten
TTK50S TTK70S
Performance
Messschrit t
Periodenlänge 1 mm
Messlänge max. 1.000 mm max. 4.000 mm
Magnetbandlänge
Systemgenauigkeit (Umgebungstemperatur) ± 10 μm (+20 °C)
Wiederholgenauigkeit < 5 μm
Messwertumkehrspanne < 10 μm
Schnittstellen
Codeart binär
Schnittstellensignale Prozes sdatenkanal analog, differentiell
Parameterkanal RS 485 digital
Verfügbarer Speicher im EEPROM 2048 1.792 Byte
Mechanik / Elektrik
Abmessungen / Maße Siehe Maßzeichnung
Masse Lesekopf 0,06 kg 0,08 kg
Masse Magnetband 0,18 kg/m
Werkstoff Lesekopf Zinkdruckguss
Magnetband 17410 Hartferrit 9/28 P
Verfahrgeschwindigkeit ≤ 10 m/s
Verfahrgeschwindigkeit bis zu der die Absolutposi‐
tion zuverlässig gebildet wird
Anschlussart Leitung, 8-adrig
Elektrische Schnittstelle HIPERFACE
Betriebs- und Versorgungsspannungsbereich 7 V DC … 12 V DC
Empfohlene Versorgungsspannung 8 V DC
Betriebsstrom ohne Last ≤ 55 mA
Montagetoleranzen
Leseabstand Sensor/Band ≤ 0,3 mm
seitlicher Versatz
Fluchtungsfehler < ±1°
Umgebungsdaten
Arbeitstemperaturbereich - 30 °C ... +80 °C
Lagertemperaturbereich - 40 °C ... +85 °C, ohne Verpackung
Relative Luftfeuchtigkeit / Betauung 100 %, Betauung zulässig
Widerstandsfähigkeit gegenüber Schocks 30 g, 6 ms (EN 60068-2-27)
Widerstandsfähigkeit gegenüber Vibration
EMV EN 61000-6-2, EN 61000-6-3 2 2)
Schutzart IP 65
Temperaturkoeffizient Magnetband (11 ± 1) μm/K/m
Zulässige maximale Umgebungsfeldstärke
Zulässige maximale Feldstärke < 150 kA/m (< 190 mT)
Sicherheitstechnische Kenngrößen
Sicherheits-Integritätslevel
Performance Level PL d (EN ISO 13849)
Kategorie 3 (EN ISO 13849)
Wahrscheinlichkeit eines Gefahr bringenden Ausfalls
pro Stunde (PFHD)
5)
Gebrauchsdauer (TM)
0,244 μm bei Interpolation der Sinus-/
Cosinussignale mit z. B. 12 Bit
Messlänge
+ 60 mm
Messlänge
+ 80 mm
1,3 m/s
Leitung, 8-adrig
Stecker M12, 8polig
®
1)
+0,6 mm, -0,6mm+0,4 mm, -0,2
20 g, 10 Hz … 2.000 Hz (EN
60068-2-6)
2)
< 3 kA/m ... 4 kA/m (3,8 mT ... 5 mT):
damit die Genauigkeitswerte eingehal‐
SIL2 (IEC 61508), SILCL2 (EN 62061)
ten werden
4)
2,02 x 10
≤ 65 mA
mm
3)
-8
1)
20 Jahre (EN ISO 13849)
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 4
Page 5
TTK50S TTK70S
24
17
20
14
Ø 3,3
Ø 6
2
10
25
50
~ 12
6
14
5,5
10
5,3
10–0,1
0
M12 x 1
14
61,5
40
8
13
6,6
5,5
70
30
23,6
8
70
40
30
23,6
~ 18
50
2,5
21
14
5,3
10
5,5
Größe Lesekopf
5 0 50 mm
7 0 70 mm
Elektrische Schnittstelle
H HIPERFACE
®
X Linear
Anschlussart
A Stecker M12, 8-polig
J Leitung, 8-adrig, 0,5 m
I Leitung, 8-adrig, 1 m
Q Leitung, 8-adrig, 2 m
M Leitung, 8-adrig, 5 m
Speicherbereich
K 0 2 E²PROM 2048
T T K S - 0 - K 0 2
MTTFd: Zeit bis zu gefährlichem Ausfall > 100 Jahre (EN ISO 13849)
Testrate Nicht erforderlich
Max. Anforderungszeit Kontinuierlich (Analogsignale)
Sicherheitsgerichtete Genauigkeit
5)
±0,25 mm (= ±¼ Pollänge)
Sicherheitsgerichteter Messschritt 0,25 mm
1)
Während des Abgleichvorgangs ca. 100 mA.
2)
Wenn das sichere Motor-Feedback-System in einem elektrisch leitenden Gehäuse mon‐
tiert ist, wird entsprechend den angeführten Normen zur EMV gewährleistet, dass das
sichere Motor-Feedback-System über einen Kabelschirm mit dem zentralen Erdungs‐
punkt des Motorreglers verbunden ist.
Der GND-Anschluss (0 V) der Versorgungsspannung ist dort ebenfalls mit Erde verbun‐
den. Bei Verwendung anderer Schirmkonzepte muss der Anwender eigene Tests durch‐
führen.
2)
Die Schutzart (gemäß IEC 60529) wird erreicht bei aufgestecktem Gegenstecker.
3)
Der maximal zulässige Fremdfeldeinfluss ist erreicht, wenn der Positionswert um mehr
als 5 μm vom ursprünglichen Wert (ohne Fremdfeldeinfluss) abweicht. Dieser Wert wird
erreicht, wenn am Ort des Sensors eine Feldstärke von 3 kA/m ... 4 kA/m
(3,8 mT ... 5 mT) zusätzlich zur Feldstärke des Magnetbandes auftritt.
4)
Für detaillierte Informationen zur exakten Auslegung ihrer Maschine/Anlage setzten Sie
sich bitte mit Ihrer zuständigen SICK-Niederlassung in Verbindung.
5)
Die angegebenen Werte beziehen sich auf einen Diagnosedeckungsgrad von 90 %, der
durch das externe Antriebssystem erreicht werden muss. Im Resonanzfall sind geeignete
Tests des gesamten Antriebssystems durchzuführen.
9.1 Maßzeichnungen
Abbildung 12: Maßzeichnung TTK70S mit Leitungsabgang (alle Maße in mm)
10 Bestelldaten
Abbildung 10: Maßzeichnung TTK50S mit Leitungsabgang (alle Maße in mm)
Abbildung 11: Maßzeichnung TTK70S mit Stecker M12 (alle Maße in mm)
Abbildung 13: Bestellschlüssel
11 Anhang
11.1 Lieferumfang
•
Sicheres Motor-Feedback-System
•
Allgemeine Sicherheitshinweise
•
Betriebsanleitung
Weiteres Zubehör finden Sie in der Produktinformation auf www.sick.com
11.2 Konformitäten
Die sicheren Motor-Feedback-Systeme TTK50/TTK70S wurden gemäß folgenden
Richtlinien hergestellt:
•
Maschinenrichtlinie 2006/42/EG
•
EMV-Richtlinie 2014/30/EU
Die vollständige EU-Konformitätserklärung finden Sie auf der SICK-Homepage im
Internet:
www.sick.com
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 5
Page 6
O P E R A T I N G I N S T R U C T I O N S e n
Safe motor feedback systems
1 About this document
Please read these operating instructions carefully before using the safe motor
feedback system or mounting it, putting it into operation or servicing it.
This document is the original operating instructions.
1.1 Purpose of this document
These operating instructions provide technical personnel of the machine manu‐
facturer or the machine operator instructions regarding the safe assembly, electri‐
cal installation, commissioning, operation and maintenance of the safe motor
feedback system.
These operating instructions are to be made available to all those who work with
the safe motor feedback system.
Furthermore, planning and using safety-oriented sensors such as the safe motor
feedback system also requires technical skills that are not covered in this docu‐
ment.
The official and legal regulations for operating the safe motor feedback system
must always be complied with.
1.2 Symbols and document conventions
WARNING
A safety note informs you of real-world specifications for safely mounting and
installing the safe motor feedback system.
This is intended to protect you against accidents.
Read and follow the safety notes carefully.
NOTE
Indicates useful tips and recommendations.
Instructions for taking action are indicated by an arrow. Carefully read and
b
follow the instructions for action.
1.3 Associated documents
•
“HIPERFACE® Safety” implementation manual - 8014120, as of 12/2010 (or
newer)
•
Hiperface® motor feedback protocol specifications - 8010701, as of 4/2008
(or newer)
2 Safety information
This chapter concerns your own safety and the safety of the system operator.
2.1 General safety notes
The national and international legal specifications apply to the installation and
use of the safe motor feedback system, to its commissioning and to technical
inspections repeated at regular intervals, in particular:
•
Machinery Directive 2006/42/EC
•
Work Equipment Directive 2009/104/EC
•
Accident prevention regulations and safety regulations
•
Any other relevant safety regulations
The manufacturer and operator of the machine on which the safe motor feedback
system is used are responsible for coordinating and complying with all applicable
safety specifications and regulations, in cooperation with the relevant authorities.
The manufacturer of the drive system connected must have complied with the
safety requirements for the drive system design described in the implementation
manual, “HIPERFACE® Safety” - 8014120.
2.2 Intended use
The safe motor feedback system is ideal for the dynamic and precise operation of
servo-control circuits due to its equipment.
The overall system, consisting of read head, measuring elements, evaluation sys‐
tem, servo inverter, and motor, forms a control circuit.
The safety-oriented use of safe motor feedback systems with a HIPERFACE® inter‐
face concerns application in combination with linear motors.
The following information can be derived from the digital position signals of a safe
motor feedback system connected directly to a motor shaft:
•
(Rotational) speed information and commuting information in linear motors.
The safe motor feedback system can be used in conjunction with a drive system
in accordance with IEC 61800-5-2, in safety applications up to category 3 and PL
d in accordance with EN ISO 13849 or SILCL2 in accordance with EN 62061.
It fulfills the requirements of the Machinery Directive 2006/42/EC and provides
support for the drive system in ensuring:
•
The safety functions, based on the safe position or speed information of the
safe motor feedback system.
•
In the case of safety functions that are based on the safe absolute position,
the safe motor feedback system only supplies one channel without safetyrelated diagnostics upon being switched on. A second channel must be
implemented by the user using other measures. This second channel can be
provided by the user by saving the position of the safe motor feedback sys‐
tem before switching it off and comparing it to the starting position of the
safe motor feedback system when switching it on the next time. Use for
absolute position safety-related purposes is possible only if the values
match. Otherwise, a reference run must be carried out by the user. Without a
second channel, a reference run must be carried out each time the safe
motor feedback system is switched on to confirm the absolute position.
The safe motor feedback system is not able to create a safe state for the drive
system independently. The drive system has to create the safe state as a
response to an error displayed by the safe motor feedback system.
The sensor signals are transferred to the evaluation system via a HIPERFACE
interface. In combination with a drive system of category 3 (EN ISO 13849),
SILCL2 (EN 62061), or PL d (EN ISO 13849), the safe motor feedback system is
suitable for safety applications. If only the analog incremental signal outputs
(sine/cosine) are used for speed-based safety functions of the drive, the safe
motor feedback system meets the requirements in EN 61800-5-2.
The safe motor feedback system does not support any safety-related operating
modes in the context of an absolute position.
To detect all impermissible changes in the relationship between sine and cosine,
vector length monitoring is used. For the TTK50S/ TTK70S, the vector length
must not deviate by more than max. +/- 15% (see chapter 6.2. “HIPERFACE
Safety” implementation manual - 8014120).
A deviation that is greater than +/-15% indicates a violation of the vector length
limits. The drive must respond to the error accordingly.
WARNING
The safe motor feedback system may be used only within the limits of the
prescribed and specified technical data, dimensions and tolerances of the
dimensional drawings and operating conditions, and the specified tightening
torques must be complied with.
If used in any other way or if alterations are made to the device – including in
the context of mounting and installation – this will render void any warranty
claims directed to SICK STEGMANN GmbH.
2.3 Improper use
The safe motor feedback system must only be used with a defined mounting kit
(2105618). The connection between the drive system and the safe motor feed‐
back system must have a rigid design.
The safe motor feedback system cannot support safety functions that are based
on the absolute position, which is transmitted to the RS 485 parameter channel,
without additional measures.
The mechanical coupling of the measurement system to the drive is relevant to
safety. Standard EN 61800-5-2, table D16, requires fault exclusion here concern‐
ing the release of the mechanical connection between the measurement system
and the drive. The specifications for mounting the measurement system must be
observed.
If such stimulations cannot be reliably ruled out in the application, suitable tests
must be carried out for the entire drive system.
2.4 Requirements for the qualification of personnel
The TTK50S/TTK70S safe motor feedback system may be mounted, put into
operation, checked, maintained, or used only by qualified safety personnel.
Safety personnel is qualified when the following requirements are fulfilled:
•
Appropriate technical training of the personnel
•
Instruction of the machine operator in machine operation and the applicable
safety guidelines
•
Access to these operating instructions
®
®
3 Project planning
WARNING
The supply voltage must be generated from PELV systems (EN 50178). The
safe motor feedback system conforms to protection class III in accordance
with EN 61140. If the supply voltage is not generated from PELV systems, the
user must take other measures to ensure safe disconnection for live parts.
4 Mounting
This chapter describes the mounting of the safe motor feedback system.
4.1 Safety
NOTE
Mounting must only be done in accordance with the specified IP enclosure
rating (see technical data).
If applicable, the system must be protected from damaging environmental
influences such as spray water, dust, impacts and temperature.
NOTE
Impacts or shocks must be prevented when mounting the safe motor feed‐
back system.
NOTE
The safe motor feedback system must only be used with a defined mounting
kit (2105618 / 2109583). An acceleration of < 100 m/s² is permitted (see
EN 61800-5.2, table D16).
WARNING
The influence of magnetic fields must be avoided. In particular, magnet fields
(e.g. holding magnets or other permanent magnets) must not come into
direct contact with the magnetic tape.
•
External magnetic fields > approx. 3 ... 4 kA/m (3.8 ... 5 mT) influence
the measurement accuracy.
•
Field strengths > 150 kA/m (> 190 mT) irreversibly change the magneti‐
zation of the magnetic tape.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 6
Page 7
WARNING
required tape length = measuring section + 60 mm (2.36 inch)
measuring section5
(0.20)
5
(0.20)
50 (1.97)
Travel direction
Marking on sensor Marking on strip
Only use the screws once. After removing the safe motor feedback system:
At the connection between the drive system and the safe motor feed‐
b
back system, the affected thread must be free from residue.
Use a new (unused) screw with screw adhesive on the thread during the
b
remounting process.
If mounted again, the mounting kit (2105618 / 2109583) must be pur‐
b
chased from SICK.
Disassembly
NOTE
If the safe motor feedback system has to be removed, the mounting steps are
to be carried out in reverse order.
4.2 Magnetic tape mounting
NOTE
For technical reasons, an additional allowance must be taken into account for
the length (across from the measuring distance):
•
TTK50 S: ≥ 60 mm
•
TTK70 S: ≥ 80 mm
4.3 Magnetic tape mounting examples
Figure 2: Mounting example - angled protective tape
The simple mounting method with angled protective tape is only recommended in
a very protected environment.
Figure 1: Magnetic tape mounting
NOTE
Mounting must be done level to the mounting surface or the distance to be
measured. Ripples always impair the measurement accuracy. Sufficient
mechanical protection must be ensured (e.g. against impacts and vibrations).
NOTE
To achieve optimal bonding, all anti-adhesive foreign substances (oil, fat,
dust, etc.) must be removed with cleaning agents which evaporate with the
minimum possible level of residue. Among others, ketone (acetone) or alco‐
hol are good cleaning agents.
NOTE
The adhesive surfaces must be dry and the maximum possible contact pres‐
sure must be used for adhesion. An adhesion temperature of 20 °C and
30 °C in dry rooms is optimal.
NOTE
When adhering longer strips of tape, the protective film of the tape should be
removed in shorter sections to fix the tape. Then the tape is aligned. After
alignment, the rest of the protective film can be pulled out from the side while
pressure is applied to the tape at the same time.
Carefully clean the mounting surface.
b
Remove the protective film of the tape on the magnetic tape.
b
Adhere the magnetic tape in line with the direction of movement.
b
Carefully clean the magnetic tape surface.
b
Remove the protective film of the tape on the covering tape.
b
Adhere covering tape (slightly overlap at both ends).
b
Secure the overlapping ends of the cover tape from coming loose.
b
Figure 3: Mounting example - magnetic tape, fastened on front
Figure 4: Mounting example - magnetic tape, fastened flat
There is a risk of peeling off if the environment is not protected. In these cases,
mounting methods with front or flat fastening of the magnetic tape are suitable.
Figure 5: Mounting example - magnetic tape in a slot
Mounting in a slot offers optimal protection. The slot must be deep enough that
the magnetic tape can be completely embedded inside it.
4.4 Read head mounting
WARNING
The tolerance and distance dimensions must be complied with for the entire
measuring distance. Larger deviations in mounting lead to implausible posi‐
tion values.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 7
Page 8

0.6 (0.02)
0.6 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
Figure 6: TTK50S mounting tolerances
0.2 (0.01)
0.4 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
< ± 1°
2
1
1
2
3
4
Figure 7: TTK70S mounting tolerances
1
2
The location of the sensor compared to the magnetic tape is exactly defined. Dur‐
ing mounting, make sure that there is an air gap between the tape and sensor
over the entire measuring distance, regardless of whether the tape or the sensor
is moved. The supplied distance gage can be used as a mounting aid.
The read head TTK50S can only be mounted with the mounting kit (2109583).
The mounting kit consists of a mounting plate and two countersunk screws.
The read head TTK70S can only be mounted with the mounting kit (2105618).
The mounting kit consists of two titan screws, safety discs, female connectors
and washers each.
Without covering tape
With covering tape
WARNING
As soon as the covering tape has been applied, the tape print is no longer vis‐
ible. We recommend marking the covering tape correspondingly.
NOTE
The arrow direction of the sensor print must match the arrow direction of the
tape print.
Figure 9: Read head mounting TTK70S
1. Mount the titan screw (4), safety disc (3), washer (2) and female connector
(1) as shown.
2. Check the distance between the sensor and tape using the distance gage.
3. Secure screw with screw adhesive.
4. Tighten titan screws. Tightening torque: 2.5 ± 0.1 Nm.
5 Electrical installation
NOTE
Observe the corresponding operating instructions of the external drive system
or the higher-order control system for the installation of the safe motor feed‐
back system.
NOTE
Make sure the affected machines/systems are in a de-energized state during
mounting!
Figure 8: Read head mounting TTK50S
1. Mount the countersunk screws (2) and mounting plate (1) as shown.
2. Check the distance between the sensor and tape using the distance gage.
3. Secure countersunk screws (2) with screw adhesive.
4. Tighten countersunk screws. Tightening torque: 1,41 ± 0,1 Nm.
5.1 Shielding connection
NOTE
Select the area of application so that inductive or capacitative faults cannot
affect the sensor or its connecting cable.
NOTE
A suitable encoder shield connection to the ground or to the motor shield is
required for smooth operation.
NOTE
Install the cable with strain relief. If necessary, provide a drag chain or protec‐
tive hose.
5.2 Safe motor feedback system signals
The safe motor feedback system has the following signals:
HIPERFACE® interface:
•
US supply voltage; the supply voltage is between +7 V and +12 V, the recom‐
mended supply voltage is +8 V.
•
GND - ground connection; electrically isolated from the housing. The voltage
drawn is US.
•
+ SIN process data channel; sine signal of 1 Vpp with a static offset of REF‐
SIN.
•
REFSIN process data channel; static voltage of +2.5 V, reference voltage for
+SIN.
•
+ COS process data channel; cosine signal of 1 Vpp with a static offset of
REFCOS.
•
REFCIS process data channel; static voltage of +2.5 V, reference voltage for
+COS.
•
Data ± – RS485 parameter channel: negative/positive data signal; the para‐
meter channel is an asynchronous, half-duplex interface which physically
conforms to the EIA RS485 specification. For this, data can be requested
from the safe motor feedback system through different commands; this also
makes it possible to write user-specific data such as position offset to the
E2PROM of the safe motor feedback system.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 8
Page 9

5.3 Connection overview
5.3.1 M12, 8-pin
NOTE
We will be glad to help you dispose of these devices. Please contact us.
9 Technical data
Technical data
TTK50S TTK70S
Performance
Measurement step
Period length 1 mm
Fig. 6: M12 connection, 8-pin
M12 pin assignment, 8-pin
PIN Signal
1 REFSIN
2 +SIN
3 REFCOS
4 +COS
5 Data +
6 Data 7 GND
8 US
- Housing potential, shield or housing connector.
5.3.2 Cable outlet
Cable assignment, cable outlet
Wire color Signal
Brown REFSIN
White +SIN
Black REFCOS
Pink +COS
Gray Data +
Green Data Blue GND
Red US
Cu mesh Screen
Measurement length Max. 1,000 mm Max. 4,000 mm
Magnetic tape length
System accuracy (ambient temperature) ± 10 μm (+20 °C)
Repeatability < 5 μm
Measured value reversal range < 10 μm
Interfaces
Code type Binary
Interface signals, proces s data channel Analog, differential
Parameter channel RS 485 Digital
Available memory in EEPROM 2048 1,792 bytes
Mechanics/electronics
Dimensions See dimensional drawing
Read head weight 0.06 kg 0.08 kg
Magnetic tape weight 0.18 kg/m
Read head material Zinc die cast
Magnetic tape 17410 Hard ferrite 9/28 P
Traversing speed ≤ 10 m/s
Traversing speed up to which the absolute position
is reliably determined
Connection type Cable, 8-wire
Electrical interface HIPERFACE
Operational and supply voltage range 7 V DC … 12 V DC
Recommended supply voltage 8 V DC
Operating current (no load) ≤ 55 mA
6 Commissioning
Commissioning the safe motor feedback system requires that the manufacturer of
the connected drive system has complied with the safety requirements for the
drive system design as described in the implementation manual, “HIPERFACE
Safety” - 8014120.
6.1 Inspection
Further inspection measures are not required during operation.
WARNING
The safe motor feedback system has a maximum mission time (see technical
data). After this time, it must be taken out of service.
The bearing service life must be taken into account in addition to the mission
time. The parameter which is first reached depending on the application
determines the time when the system must be taken out of operation.
The safe motor feedback system’s construction year can be found in the ser‐
ial number (SN) on the device label or on the packaging label (YYWW).
YY = represents the year (without century)
WW = represents the calendar week of the last manufacturing process.
®
Mounting tolerances
Sensor/Tape reading distance ≤ 0.3 mm
Side deviation
Alignment fault < ± 1°
Ambient data
Operating temperature range - 30 °C ... +80 °C
Storage temperature range - 40 °C ... +85 °C, without packaging
Relative humidity/condensation 100%, condensation permitted
Resistance to shocks 30 g, 6 ms (EN 60068-2-27)
Resistance to vibrations
EMC EN 61000-6-2, EN 61000-6-3 2 2)
Enclosure rating IP 65
Magnetic tape temperature coefficient (11 ± 1) μm/K/m
7 Servicing
The safe motor feedback system is maintenance-free. No repair option is provided
in the event of a defect. Please contact us if you have any complaints.
The surface of the magnetic tape can be cleaned with a soft cloth if there are high
levels of contamination.
8 Decommissioning
8.1 Protecting the environment
The safe motor feedback system has been designed to minimize its impact on the
environment. It consumes only a minimum of energy and natural resources.
Always act in an environmentally responsible manner at work. For this rea‐
b
son, please note the following information on disposal.
8.2 Disposal
Always dispose of unusable or irreparable devices in accordance with the applica‐
ble waste disposal regulations specific to your country.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 9
Maximum permitted ambient field strength
Maximum permitted field strength < 150 kA/m (< 190 mT)
Safety-related parameters
Safety integrity level
Performance level PL d (EN ISO 13849)
Category 3 (EN ISO 13849)
Probability of a dangerous failure per hour (PFHD)
Mission time (TM)
MTTFd: mean time to dangerous failure > 100 years (EN ISO 13849)
Test rate Not required
Max. request time Continuous (analog signals)
Safety-related accuracy
5)
0.244 μm for interpolation of the sine/
cosine signals with e.g. 12 bit
Measurement
length
+60 mm
Measurement
1.3 m/s
Cable, 8-wire
M12 male connec‐
tor, 8-pin
®
1)
+0.6 mm,
-0.6 mm
20 g, 10 Hz … 2,000 Hz (EN
60068-2-6)
< 3 kA/m ... 4 kA/m (3.8 mT ... 5 mT):
to ensure accuracy values are main‐
SIL2 (IEC 61508), SILCL2 (EN 62061)
5)
2.02 x 10
tained
4)
≤ 65 mA
+0.4 mm,
2)
3)
-8
20 years (EN ISO 13849)
± 0.25 mm (= ±¼ pin length)
length
+80 mm
-0.2 mm
1)
Page 10

TTK50S TTK70S
24
17
20
14
Ø 3,3
Ø 6
2
10
25
50
~ 12
6
14
(0.55)
5.5
(0.22)
10
(0.39)
5.3
(0.21)
10–0,1
(0.39)
0
M12 x 1
14
(0.55)
61.5 (2.42)
40 (1.57)
8
(0.31)
13
(0.51)
6.6 (0.26)
5.5 (0.22)
70 (2.76)
30 (1.18)
23.6 (0.93)
8
(0.31)
70 (2.76)
40 (1.57)
30 (1.18)
23.6
(0.93)
~ 18
(0.71)
50
(1.97)
2.5
(0.10)
21
(0.83)
14
(0.55)
5.3
(0.21)
5.5 (0.22)
10 (0.39)
Größe Lesekopf
5 0 50 mm
7 0 70 mm
Elektrische Schnittstelle
H HIPERFACE
®
X Linear
Anschlussart
A Stecker M12, 8-polig
J Leitung, 8-adrig, 0,5 m
I Leitung, 8-adrig, 1 m
Q Leitung, 8-adrig, 2 m
M Leitung, 8-adrig, 5 m
Speicherbereich
K 0 2 E²PROM 2048
T T K S - 0 - K 0 2
Safety-related measuring increment 0.25 mm
1)
About 100 mA during the calibration process.
2)
If the safe motor feedback system is mounted in an electrically-conductive housing, in
compliance with the listed EMC standards, it is ensured that the central safe motor feed‐
back system is connected to the central earthing point of the motor controller with a
cable lug.
The GND connection (0 V) of the supply voltage is also grounded here. If other shielding
concepts are used, users must perform their own tests.
2)
The enclosure rating (in accordance with IEC 60529) is achieved with the attached mat‐
ing connector.
3)
The maximum permitted external field influence is reached when the position value devi‐
ates from the original value (without external field influence) by more than 5 μm. This
value is reached when, at the sensor location, a field strength of 3 kA/m ... 4 kA/m
(3.8 mT ... 5 mT) occurs in addition to the field strength of the magnetic tape.
4)
For more detailed information on the exact configuration of your machine/unit, please
consult your relevant SICK subsidiary.
5)
The specified values apply to a diagnostic coverage rate of 90%, which must be achieved
by the external drive system. In the event of resonance, suitable tests have to be carried
out on the entire drive system.
9.1 Dimensional drawings
Figure 12: TTK70S dimensional drawing with cable outlet (all dimensions in mm)
10 Ordering information
Figure 10: TTK50S dimensional drawing with cable outlet (all dimensions in mm)
Figure 13: Ordering code
11 Appendix
11.1 Scope of delivery
•
Safe motor feedback system
•
General safety notes
•
Operating instructions
You can find additional accessories in the product information at www.sick.com.
11.2 Conformities
Figure 11: Dimensional drawing TTK70S with M12 male connector (all dimen‐
sions in mm)
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 10
The TTK50/TTK70S safe motor feedback systems were manufactured in accor‐
dance with the following directives:
•
Machinery Directive 2006/42/EC
•
EMC Directive: 2014/30/EU
The complete EU Declaration of Conformity is available from the SICK homepage
on the Internet:
www.sick.com
Page 11

I N S T R U C C I O N E S D E U S O e s
Sistemas motor feedback seguros
1 Acerca de este documento
Lea atentamente estas instrucciones de uso antes de trabajar con el sistema de
realimentación del motor seguro, montarlo, ponerlo en servicio o llevar a cabo
tareas de mantenimiento.
Esta es una traducción de las Instrucciones de uso originales.
1.1 Finalidad de este documento
Estas instrucciones de uso indican al personal técnico del fabricante o de la
empresa explotadora de la máquina cómo llevar a cabo el montaje, la instalación
eléctrica, la puesta en servicio, el funcionamiento y el mantenimiento del sistema
de realimentación del motor seguro.
Estas instrucciones de uso deben ponerse a disposición de todo el personal que
trabaje con el sistema de realimentación del motor seguro.
Además, para la planificación y la utilización de sensores de seguridad, como el
sistema de realimentación del motor seguro, es necesario contar con conocimien‐
tos técnicos previos, ya que estos no se incluyen en las presentes instrucciones.
Deben respetarse las disposiciones legales y oficiales durante el funcionamiento
del sistema de realimentación del motor seguro.
1.2 Símbolos y convenciones utilizados en este documento
ADVERTENCIA
Una indicación de seguridad le avisa de una especificación concreta para
realizar con seguridad el montaje y la instalación del sistema de realimen‐
tación del motor seguro.
Su objetivo es prevenir accidentes.
Lea y observe atentamente las indicaciones de seguridad.
INDICACIÓN
Indica consejos y recomendaciones útiles.
Las instrucciones sobre acciones concretas están señaladas con una flecha.
b
Lea detenidamente y cumpla con esmero las instrucciones sobre las accio‐
nes a realizar.
1.3 Documentos anexos
•
Manual de implementación “HIPERFACE® Safety” - 8014120 versión
12.2010 (o posterior)
•
Specification Hiperface® Motor feedback protocol - 8010701, versión
04.2008 (o posterior)
2 Para su seguridad
Este capítulo sirve para su propia seguridad y la de los usuarios de la instalación.
2.1 Indicaciones básicas de seguridad
Para el montaje y la utilización del sistema de realimentación del motor seguro,
así como para su puesta en servicio y sucesivas comprobaciones técnicas se apli‐
can las disposiciones legales nacionales e internacionales, en especial las
siguientes:
•
Directiva de máquinas 2006/42/CE
•
Directiva de uso de medios de trabajo 2009/104/CE
•
Disposiciones para la prevención de riesgos laborales y normas de seguri‐
dad
•
Otras disposiciones de seguridad relevantes
El fabricante y la empresa explotadora de la máquina en la que se utiliza el sis‐
tema de realimentación del motor seguro tienen la responsabilidad de acordar
con las autoridades pertinentes todas las disposiciones y normas de seguridad
aplicables, así como de respetarlas.
El fabricante del sistema de accionamiento conectado debe cumplir al diseñarlo
los requisitos de seguridad descritos en el manual de implementación
„HIPERFACE® Safety“ - 8014120.
2.2 Uso conforme a lo previsto
Debido a su equipamiento, el sistema de realimentación del motor seguro se des‐
tina al funcionamiento dinámico y preciso de servocircuitos de control.
El sistema completo, compuesto por cabezal de lectura, medidas materializadas,
sistema de evaluación, servoconvertidor y motor, conforma un circuito de control.
El uso en aplicaciones de seguridad de los sistemas de realimentación del motor
seguros con interfaz HIPERFACE® se refiere a su aplicación en combinación con
motores lineales.
La siguiente información se puede deducir de las señales de posición digitales
del sistema de realimentación del motor seguro acoplado directamente al eje del
motor:
•
en motores lineales, información sobre el número de revoluciones o la velo‐
cidad, así como información sobre la conmutación.
El sistema de realimentación del motor seguro puede utilizarse en combinación
con un sistema de accionamiento de acuerdo con la norma IEC 61800-5-2 y en
aplicaciones de seguridad hasta la categoría 3 y PL d de acuerdo con la norma
EN ISO 13849 o la categoría SILCL2 según EN 62061.
Este sistema cumple las exigencias de la Directiva de máquinas 2006/42/CE y
actúa como asistente del sistema de accionamiento para garantizar lo siguiente:
•
Las funciones de seguridad basadas en la información fiable sobre la veloci‐
dad o la posición del sistema de realimentación del motor seguro.
•
Para las funciones de seguridad que se basan en la posición absoluta
segura, el sistema de realimentación del motor seguro proporciona, al
encenderlo, solo un canal sin diagnóstico seguro. El usuario deberá imple‐
mentar un segundo canal con la ayuda de otras medidas. El usuario podrá
proporcionar este segundo canal almacenando la posición del sistema de
realimentación del motor seguro antes de desconectarlo y comparándola
con su posición de inicio al volver a encenderlo. La posición absoluta solo
puede utilizarse para aplicaciones de seguridad si coinciden los valores. De
lo contrario, el usuario debe realizar un recorrido de referencia. Si no se dis‐
pone de un segundo canal, cada vez que se encienda el sistema de reali‐
mentación del motor seguro, debe efectuarse un recorrido de referencia
para confirmar la posición absoluta.
El sistema de realimentación del motor seguro no puede proporcionar por sí solo
un estado seguro del sistema de accionamiento. El sistema de accionamiento
debe proporcionar el estado seguro en respuesta a un error mostrado del sistema
de realimentación del motor seguro.
La transmisión de las señales del sensor al sistema de evaluación tiene lugar
mediante una interfaz HIPERFACE®. En combinación con un sistema de acciona‐
miento de categoría 3 (EN ISO 13849), SILCL2 (EN 62061) o PL d
(EN ISO 13849), el sistema de realimentación del motor seguro es ideal para apli‐
caciones de seguridad. Si se usan las salidas analógicas de señales incrementa‐
les (seno/coseno) exclusivamente para las funciones de seguridad del acciona‐
miento basadas en la velocidad, el sistema de realimentación del motor seguro
cumple los requisitos de la norma EN 61800-5-2.
El sistema de realimentación del motor seguro no es compatible con modos de
funcionamiento para aplicaciones de seguridad relacionados con la posición o la
situación absoluta.
Para detectar todas las modificaciones no permitidas en la relación entre seno y
coseno se utiliza la monitorización de la longitud vectorial. En el TTK50S/TTK70S
se admite una desviación máx. de +/- 15% de la longitud vectorial (véase el
capítulo 6.2. Manual de implementación „HIPERFACE® Safety“ - 8014120).
Una desviación superior a +/-15% supone una vulneración de los límites de las
longitudes vectoriales y exige una respuesta al error apropiada del regulador de
accionamiento.
ADVERTENCIA
El sistema de realimentación del motor seguro solo puede utilizarse dentro
de los límites prescritos y estipulados por los datos técnicos, las medidas y
las tolerancias de los dibujos acotados y las condiciones de servicio;
además, deben respetarse los pares de apriete especificados.
Si el dispositivo se utiliza con otros fines o sufre modificaciones (incluso
durante el montaje y la instalación), la garantía de SICK STEGMANN GmbH
perderá su validez.
2.3 Uso no conforme a lo previsto
El sistema de realimentación del motor seguro solo debe montarse con un kit de
fijación definido (2105618). La unión entre el sistema de accionamiento y el sis‐
tema de realimentación del motor seguro debe efectuarse de forma rígida.
Si no se aplican medidas adicionales, el sistema de realimentación del motor
seguro no es compatible con funciones de seguridad basadas en la posición
absoluta, que se transmiten por el canal de parámetros RS 485.
El acoplamiento mecánico del sistema de medición al accionamiento es impor‐
tante para la seguridad. La norma EN 61800-5-2, tabla D16, exige aquí una
exclusión de fallo respecto al aflojamiento de la unión mecánica entre sistema de
medición y accionamiento. Deben respetarse las especificaciones para la fijación
del sistema de medición.
Si no pudieran descartarse de forma segura este tipo de excitaciones en la apli‐
cación, deberán realizarse las pruebas apropiadas de todo el sistema de acciona‐
miento.
2.4 Requisitos de cualificación del personal
El sistema de realimentación del motor seguro TTK50S/TTK70S solo deben mon‐
tarlo, ponerlo en servicio, comprobarlo, repararlo y utilizarlo personas debida‐
mente autorizadas.
Una persona está autorizada, cuando se cumplen los siguientes requisitos:
•
formación técnica adecuada del personal
•
instrucción por la empresa explotadora de la máquina para el manejo de la
misma conforme a las directivas de seguridad aplicables
•
acceso a estas instrucciones de uso
3 Planificación del proyecto
ADVERTENCIA
La tensión de alimentación debe generarse mediante sistemas PELV
(EN 50178). El sistema de realimentación del motor seguro corresponde a la
clase de protección III conforme a DIN EN 61140. En el caso de que la
tensión de alimentación no se genere mediante sistemas PELV, el usuario
deberá adoptar otras medidas que garanticen un aislamiento seguro de los
componentes conductores de tensión de red.
4 Montaje
En este capítulo se explica el procedimiento de montaje del sistema de realimen‐
tación del motor seguro.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 11
Page 12

4.1 Seguridad
required tape length = measuring section + 60 mm (2.36 inch)
measuring section5
(0.20)
5
(0.20)
50 (1.97)
Travel direction
Marking on sensor Marking on strip
INDICACIÓN
El montaje sólo se puede realizar conforme al tipo de protección IP indicado
(véase datos técnicos).
Dado el caso el sistema se ha de proteger además de las influencias ambien‐
tales tales como p. ej. agua de salpicadura, polvo, golpes, temperatura.
INDICACIÓN
Durante el montaje, evitar golpes y choques con el sistema de realimentación
del motor seguro.
INDICACIÓN
El sistema de realimentación del motor seguro solo debe montarse con un kit
de fijación definido (2105618 / 2109583). Con ello está permitida una ace‐
leración de < 100 m/s² (véase EN 61800-5.2, tabla D16).
ADVERTENCIA
Se ha de evitar influencias debido a campos magnéticos. Especialmente no
deben entrar en contacto directo los campos magnéticos (p. ej. soportes
magnéticos u otros imanes permanentes) con la cinta magnética.
•
Los campos magnéticos externos > aprox. 3 ... 4 kA/m (3.8 ... 5 mT)
influye sobre la exactitud de la medición.
•
Las intensidades de campo > 150 kA/m (> 190 mT) modifican la mag‐
netización de la cinta magnética de forma irreversible.
ADVERTENCIA
Use los tornillos solo una vez. Tras desmontar el sistema de realimentación
del motor seguro:
eliminar los restos de material de las roscas afectadas en la unión de
b
ejes entre el sistema de accionamiento y el sistema de realimentación
del motor seguro.
a la hora de volver a montarlo, use un tornillo nuevo (sin usar) con
b
medio de fijación líquido en la rosca.
a la hora de volver a montarlo, deberá adquirir en SICK el kit de fijación
b
(2105618 / 2109583).
Desmontaje
INDICACIÓN
Si es necesario desmontar el sistema de realimentación del motor seguro,
deben seguirse los pasos de montaje en el orden inverso.
INDICACIÓN
Para lograr una adhesión óptima, se ha de eliminar sustancias externas anti‐
adhesivas (aceite, grasa, polvo, etc.), usando productos de limpieza que se
evapore y no deje residuos. Como producto de limpieza son aptos entre otros
Cetonas (Acetona) o bien alcoholes.
INDICACIÓN
Las superficies a pegar deberán estar secas y pegarlas con presión de cal‐
cado lo más alta posible. La temperatura de adhesión óptima esta compren‐
dida entre 20 °C y 30 °C en espacios secos.
INDICACIÓN
Al realizar el pegado de cintas largas se deberá retirar la lámina de pro‐
tección de la cinta adhesiva en un tramo parcial corto y así fijar la cinta.
Seguidamente se realiza la alineación de la cinta. Después de alinear se
puede extraer por el lateral la longitud restante de la lamina de protección,
presionando simultáneamente la cinta.
Limpiar cuidadosamente la superficie de fijación.
b
Retirar la lámina de protección de la cinta adhesiva en la cinta magnética.
b
Pegar la cinta magnética teniendo en cuenta la dirección de desplaza‐
b
miento.
Limpiar cuidadosamente la superficie de la cinta magnética.
b
Retirar en la cinta cubertora la lámina de protección de la cinta adhesiva.
b
Pegar la cinta cubertora (deje que se solapen un poco en ambos extremos).
b
Proteger los extremos solapados de la cinta cubertora contra desprendi‐
b
miento.
4.3 Ejemplos de montaje para la cinta magnética
4.2 Montaje de la cinta magnética
INDICACIÓN
Por motivos técnicos se ha de tener en cuenta en la longitud (respecto al
tramo de medición) una medida adicional:
•
TTK50S: ≥ 60 mm
•
TTK70S: ≥ 80 mm
Figura 2: Ejemplo de montaje - cinta de protección inclinada
El tipo de montaje simple mediante cinta de protección inclinada se recomienda
sólo en un entorno muy protegido.
Figura 3: Ejemplos de montaje cinta magnética, atornillada de lado frontal
Figura 1: Montaje de la cinta magnética
INDICACIÓN
El montaje debe realizarse plano respecto a la superficie de montaje o bien
al tramo a medir. Las ondulaciones disminuyen la exactitud de medición. Se
ha de procurar suficiente protección mecánica (p.ej contra impactos y
vibración).
Figura 4: Ejemplos de montaje cinta magnética, atornillada superficial
En entornos no protegidos existe riesgo de rascado. En estos casos son más apro‐
piados los tipos de montaje con cintas magnéticas atornilladas frontalmente o
superficialmente.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 12
Page 13

Figura 5: Ejemplos de montaje cinta magnética dentro de una ranura
0.6 (0.02)
0.6 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
0.2 (0.01)
0.4 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
< ± 1°
2
1
1
2
3
4
La protección óptima de montaje es dentro de una ranura, esta deberá disponer
de profundidad suficiente de modo que la cinta magnética se pueda incrustar por
completo.
4.4 Montaje del cabezal de lectura
ADVERTENCIA
Las medidas de tolerancia y distancia deben respetarse en todo el tramo de
medición. Desviaciones de montaje mayores llevaran a valores de posición
inverosímiles.
1. Montar el tornillo de cabeza avellanada (2) y la placa de montaje (1) tal
como aparece en la ilustración.
2. Comprobar con la ayuda de la plantilla de separación la separación de sen‐
sor/cinta.
3. Asegurar los tornillos de cabeza avellanada (2) con el medio de fijación de
tornillo.
4. Apretar los tornillos de cabeza avellanada. Par de apriete: 1,41 ± 0,1 Nm.
Figura 6: Tolerancias de montaje TTK50S
Figura 7: Tolerancias de montaje TTK70S
ADVERTENCIA
Al momento de consumirse la cinta cubertora ya no está visible la impresión
de la cinta. Se aconseja el marcado de la cinta cubertora correspondiente‐
mente.
INDICACIÓN
La dirección de la flecha de la impresión del sensor debe concordar con la
dirección de la flecha de la impresión de la cinta.
La posición del sensor respecto a la cinta magnética está definida de forma pre‐
cisa. Durante el montaje se de ha tener en cuenta especialmente en todo el
tramo de medición entre la cinta y el sensor, de mantener un espacio, indepen‐
dientemente si se mueve la cinta o el sensor. Como auxiliar de montaje se puede
usar la plantilla de separación adjunta.
El montaje del cabezal de lectura TTK50S sólo se puede realizar con el kit de
fijación (2109583). El kit de fijación está formado por una placa de montaje y dos
tornillos de cabeza avellanada.
El montaje del cabezal de lectura TTK70S sólo se puede realizar con el kit de
fijación (2105618). El kit de fijación consta de dos tornillos de titanio, arandelas
de seguridad, casquillos y arandelas respectivamente.
Figura 9: Montaje del cabezal de lectura TTK70S
1. Montar el tornillo de titanio (4), arandela de seguridad (3), arandela (2) y
casquillo (1) tal como aparece en la ilustración.
2. Comprobar con la ayuda de la plantilla de separación la separación de sen‐
sor/cinta.
3. Asegurar el tornillo con el medio de fijación de tornillo.
4. Apretar el tornillo de titanio. Par de apriete: 2,5 ± 0,1 Nm.
5 Instalación eléctrica
INDICACIÓN
Para la instalación del sistema de realimentación del motor seguro, tenga en
cuenta las instrucciones de uso del sistema de accionamiento externo o del
control superior correspondientes.
INDICACIÓN
Para realizar el montaje, asegúrese siempre de que las máquinas e instala‐
ciones afectadas se encuentren libres de tensión eléctrica.
5.1 Conexión del apantallamiento
INDICACIÓN
El lugar de uso se ha de seleccionar de modo que no puedan influir fallos
inductivos o capacitivos sobre el sensor o su cable de conexión.
INDICACIÓN
Para un servicio sin problemas, se requiere una conexión adecuada del apan‐
tallamiento del encoder a masa o al apantallamiento del motor.
INDICACIÓN
Instalar el cable con descarga de tracción. En caso necesario prever mazo de
arrastre o bien manguera de protección.
5.2 Señales del sistema de realimentación del motor seguro
El sistema de realimentación del motor seguro dispone de las siguientes señales:
Interfaz HIPERFACE®:
•
US: tensión de alimentación; el rango de tensión de alimentación se sitúa
entre +7 V y +12 V, la tensión de alimentación recomendada es de +8 V.
•
GND: conexión a masa; con aislamiento galvánico de la carcasa. La tensión
correspondiente es US.
•
+SIN: canal de datos de proceso; señal senoidal de 1 Vpp con una compen‐
sación estática de REFSIN.
•
REFSIN: canal de datos de proceso; tensión estática de +2,5 V, tensión de
referencia de +SIN.
•
+COS: canal de datos de proceso; señal cosenoidal de 1 Vpp con una com‐
pensación estática de REFCOS.
Figura 8: Montaje del cabezal de lectura TTK50S
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 13
Page 14

•
REFCOS: canal de datos de proceso; tensión estática de +2,5 V, tensión de
referencia de +COS.
•
Datos -/+: canal de parámetros RS485: señal de datos negativa / positiva;
el canal de parámetros es una interfaz asíncrona semidúplex que cumple
las especificaciones físicas del estándar EIA RS485. A través de distintas
órdenes es posible solicitar datos al sistema de realimentación del motor,
así como memorizar datos específicos del usuario, como por ejemplo la
compensación de posición, en la E2PROM del sistema de realimentación del
motor seguro.
5.3 Esquema de conexiones
5.3.1 M12 de 8 polos
8 Puesta fuera de servicio
8.1 Comportamiento respetuoso con el medio ambiente
El sistema de realimentación del motor seguro está diseñado para tener el
mínimo impacto medioambiental. Consume la menor cantidad posible de energía
y recursos.
También en el puesto de trabajo se ha de actuar de modo respetuoso con el
b
medio ambiente. Por ello, debe observarse la siguiente información relativa
a la eliminación de residuos.
8.2 Eliminación
Elimine siempre los dispositivos inservibles o que no se puedan reparar de
acuerdo con las disposiciones aplicables sobre eliminación de residuos de cada
país.
INDICACIÓN
Estaremos encantados de ayudarle a eliminar estos dispositivos. Póngase en
contacto con nosotros.
9 Datos técnicos
Datos técnicos
TTK50S TTK70S
Fig. 6: Conexión M12 de 8 polos
Asignación de terminales M12 de 8 polos
TERMINAL Señal
1 REFSIN
2 +SIN
3 REFCOS
4 +COS
5 Datos +
6 Datos 7 GND
8 US
- Potencial de carcasa, apantallamiento mediante enchufe
de carcasa.
5.3.2 Salida de cable
Asignación de cables en la salida de cable
Color del conductor Señal
Marrón REFSIN
Blanco +SIN
Negro REFCOS
Rosa +COS
Gris Datos +
Verde Datos Azul GND
Rojo US
Trenzado Cu Pantalla
6 Puesta en servicio
Para poner en servicio los sistemas de realimentación del motor seguros es indis‐
pensable que el fabricante del sistema de accionamiento conectado haya respe‐
tado al diseñarlo los requisitos de seguridad descritos en el manual de implemen‐
tación “HIPERFACE® Safety” - 8014120.
6.1 Comprobación
No se precisan otras medidas de comprobación del funcionamiento.
ADVERTENCIA
El sistema de realimentación del motor seguro tiene una duración de uso
máxima (véase Datos técnicos), tras la que debe retirarse de la circulación
obligatoriamente.
Por este motivo, además de la duración de uso, también se debe tener en
cuenta la vida de los rodamientos. El parámetro que se alcance en primer
lugar en función de la aplicación determina cuándo debe realizarse la puesta
fuera de servicio.
El año de fabricación del sistema de realimentación del motor seguro se
indica en la etiqueta del dispositivo o de su embalaje, codificado (AASS) en el
número de serie (SN).
AA = indican el año (sin especificar el siglo).
SS = indican la semana del último proceso de fabricación.
7 Mantenimiento
El sistema seguro de realimentación del motor no requiere mantenimiento. En
caso de fallo, no se ha previsto ninguna posibilidad de reparación. Póngase en
contacto con nosotros en caso de reclamaciones.
Las superficies de la cinta magnética pueden limpiarse en caso de suciedad
intensa con un trapo suave.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 14
Rendimiento
Paso de medición
0,244 μm en caso de interpolación de
las señales senoidales y cosenoidales
con, p. ej., 12 bits
Longitud del periodo 1 mm
Longitud de medición máx. 1.000 mm máx. 4.000 mm
Longitud de la cinta magnética
Longitud de
medición
+60 mm
Longitud de
medición
+80 mm
Precisión del sistema (temperatura ambiental) ± 10 μm (+20 °C)
Precisión de repetición < 5 μm
Margen de inversión del valor de medición < 10 μm
Interfaces
Tipo de código binario
Señales de la interfaz canal de datos de proceso analógicas, diferenciales
Canal de parámetros RS 485 digitales
Memoria disponible en la EEPROM 2048 1.792 Byte
Sistema mecánico y eléctrico
Dimensiones/medidas Véase el dibujo acotado
Peso cabezal de lectura 0,06 kg 0,08 kg
Peso cinta magnética 0,18 kg/m
Material cabezal de lectura Fundición inyectada de cinc
Cinta magnética 17410 ferrita dura 9/28 P
Velocidad de proceso ≤ 10 m/s
Velocidad de proceso hasta la cual se puede deter‐
minar de forma fiable la posición absoluta
Tipo de conexión Cable de 8 hilos
Interfaz eléctrica HIPERFACE
1,3 m/s
Cable de 8 hilos
Conector macho
M12 de 8 polos
®
Rango de tensión de alimentación y de servicio 7 V DC … 12 V DC
Tensión de alimentación recomendada 8 V DC
Corriente de servicio sin carga ≤ 55 mA
1)
≤ 65 mA
1)
Tolerancias de montaje
Distancia de lectura sensor/cinta ≤ 0,3 mm
Desviación lateral
+0,6 mm,
-0,6 mm
+0,4 mm,
-0,2 mm
Error de alineación < ± 1°
Datos del entorno
Rango de temperatura de servicio - 30 °C ... +80 °C
Intervalo de temperatura de almacenamiento - 40 °C ... +85 °C, sin embalaje
Humedad relativa del aire/condensación Se admite una condensación de 100%
Resistencia a choques 30 g, 6 ms (EN 60068-2-27)
Resistencia a la vibración
20 g, 10 Hz … 2.000 Hz (EN
60068-2-6)
CEM EN 61000-6-2, EN 61000-6-3 2 2)
Tipo de protección IP 65
2)
Coeficiente de temperatura de la cinta magnética (11 ± 1) μm/K/m
Intensidad de campo ambiental máx. permitida
< 3 kA/m ... 4 kA/m (3,8 mT ... 5 mT):
para cumplir con los valores de pre‐
cisión
3)
Page 15

TTK50S TTK70S
24
17
20
14
Ø 3,3
Ø 6
2
10
25
50
~ 12
6
14
(0.55)
5.5
(0.22)
10
(0.39)
5.3
(0.21)
10–0,1
(0.39)
0
M12 x 1
14
(0.55)
61.5 (2.42)
40 (1.57)
8
(0.31)
13
(0.51)
6.6 (0.26)
5.5 (0.22)
70 (2.76)
30 (1.18)
23.6 (0.93)
8
(0.31)
70 (2.76)
40 (1.57)
30 (1.18)
23.6
(0.93)
~ 18
(0.71)
50
(1.97)
2.5
(0.10)
21
(0.83)
14
(0.55)
5.3
(0.21)
5.5 (0.22)
10 (0.39)
Größe Lesekopf
5 0 50 mm
7 0 70 mm
Elektrische Schnittstelle
H HIPERFACE
®
X Linear
Anschlussart
A Stecker M12, 8-polig
J Leitung, 8-adrig, 0,5 m
I Leitung, 8-adrig, 1 m
Q Leitung, 8-adrig, 2 m
M Leitung, 8-adrig, 5 m
Speicherbereich
K 0 2 E²PROM 2048
T T K S - 0 - K 0 2
Intensidad de campo permitida < 150 kA/m (< 190 mT)
Características técnicas de seguridad
Nivel de integridad de seguridad
SIL2 (IEC 61508), SILCL2 (EN 62061)
4)
Nivel de rendimiento PL d (EN ISO 13849)
Categoría 3 (EN ISO 13849)
Probabilidad de que se produzca un fallo que
entrañe peligro por hora (PFHD)
5)
Duración de uso (TM)
20 años (EN ISO 13849)
2,02 x 10
-8
MTTFd: Tiempo medio hasta un fallo peligroso > 100 años (EN ISO 13849)
Índice de prueba No se requiere
Tiempo máximo de solicitud Continuo (señales analógicas)
Exactitud de medición orientada a la seguridad
5)
± 0,25 mm (= ±¼ longitud de polo)
Paso de medición orientado a la seguridad 0,25 mm
1)
Durante el proceso de contrastación aprox. 100 mA.
2)
La compatibilidad electromagnética según las normas aplicables queda garantizada
cuando el sistema de realimentación del motor seguro se encuentra montado en una
carcasa eléctricamente conductiva, unido al punto central de toma de tierra del regula‐
dor del motor a través de un apantallamiento de cable.
La conexión GND (0 V) de la tensión de alimentación también está allí conectada a tie‐
rra. Al utilizar otros tipos de apantallamiento, el usuario debe realizar algunas comproba‐
ciones.
2)
El tipo de protección (según IEC 60529) se alcanza con el contraconector enchufado.
3)
Se alcanza la máxima interferencia de campos externos cuando el valor de posición
diverge más de 5 μm del valor original (sin interferencias). Este valor se alcanza si en el
lugar del sensor se produce una intensidad de campo de 3 kA/m ... 4 kA/m
(3,8 mT ... 5 mT) ademas de la intensidad de campo de la cinta magnética.
4)
Para más información sobre la configuración exacta de su máquina/instalación,
póngase en contacto con su representante de SICK.
5)
Los valores indicados hacen referencia a un grado de cobertura de diagnóstico del 90%,
que debe alcanzarse mediante el sistema de accionamiento externo. En caso de reso‐
nancia, deberán realizarse las pruebas apropiadas de todo el sistema de accionamiento.
9.1 Dibujos acotados
Figura 11: Dibujo acotado TTK70S con conector macho M12 (todas las medidas
en mm)
Figura 12: Dibujo acotado TTK70S con salida de cable (todas las medidas en
mm)
10 Datos de pedido
Figura 10: Dibujo acotado TTK50S con salida de cable (todas las medidas en
mm)
Figura 13: Claves para el pedido
11 Anexo
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 15
11.1 Volumen de suministro
•
Sistema de realimentación del motor seguro
•
Indicaciones generales de seguridad
•
Instrucciones de uso
Page 16

Podrá encontrar accesorios adicionales en la información de producto en
www.sick.com
11.2 Certificados de conformidad
Los sistemas de realimentación del motor seguros TTK50/TTK70S se han fabri‐
cado de acuerdo con las siguientes directivas:
•
Directiva de máquinas 2006/42/CE
•
Directiva CEM 2014/30/UE
La declaración de conformidad de la UE completa está a su disposición en la
página web de SICK:
www.sick.com
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 16
Page 17

I S T R U Z I O N I P E R L ' U S O i t
Sistemi di sicurezza Motor Feedback
1 In merito al documento in oggetto
Leggere attentamente le presenti istruzioni per l'uso prima di lavorare con il
sistema Motorfeedback di sicurezza prima di montarlo, metterlo in esercizio o pro‐
cedere alla sua manutenzione.
Il presente documento costituisce le istruzioni d'uso originali.
1.1 Funzione di questo documento
Queste istruzioni per l'uso guidano il personale tecnico della ditta costruttrice
della macchina, ovvero del gestore della macchina stessa, nel montaggio,
nell'installazione elettrica e nella messa in servizio all'insegna della sicurezza,
nonché nell'esercizio e nella manutenzione del sistema Motorfeedback di sicu‐
rezza.
Le istruzioni per l'uso devono essere messe a disposizione di tutte le persone che
lavorano con il sistema Motorfeedback di sicurezza.
Inoltre, per la progettazione e l'impiego di dispositivi di protezione, come il sistema
Motorfeedback di sicurezza sono necessarie conoscenze tecniche specifiche non
contenute nel presente documento.
In linea di principio per l'esercizio del sistema Motorfeedback di sicurezza occorre
attenersi alle disposizioni previste dalle autorità e dalla legge.
1.2 Simboli e convenzioni utilizzati nel documento
AVVERTENZA
Le avvertenze di sicurezza forniscono indicazioni concrete per il montaggio e
l'installazione sicuri del sistema Motorfeedback
allo scopo di proteggere le persone da eventuali infortuni.
Leggere e seguire attentamente le avvertenze di sicurezza!
INDICAZIONE
Segnala suggerimenti e consigli.
Le istruzioni pratiche sono contrassegnate con una freccia. Leggere e
b
seguire attentamente le istruzioni pratiche.
1.3 Documenti pertinenti
•
Specification Hiperface® Motorfeedback protocol - 8010701, versione
04.2008 (o più aggiornata)
•
8010701, versione 04.2008 (o più aggiornata)
2 Norme di sicurezza
Il presente capitolo è dedicato alla sicurezza personale e alla sicurezza degli ope‐
ratori sull'impianto.
2.1 Avvertenze di sicurezza generali
Per il montaggio e l'uso del sistema Motorfeedback di sicurezza nonché per la
messa in servizio e i ripetuti controlli tecnici valgono le disposizioni di legge nazio‐
nali e internazionali, in particolare:
•
Direttiva Macchine 2006/42/EG
•
Direttiva di utilizzo mezzi di lavoro 2009/104/CE
•
Regole antinfortunistiche e di sicurezza
•
Altre norme di sicurezza pertinenti
I costruttori e gli operatori della macchina, su cui si utilizza il sistema Motorfeed‐
back di sicurezza devono concordare e rispettare, sotto la propria responsabilità,
tutte le disposizioni e le normative di sicurezza vigenti con le autorità preposte.
Il costruttore del sistema di azionamento collegato deve soddisfare, in fase di
posa del sistema stesso, i requisiti di sicurezza descritti nel manuale d´implemen‐
tazione “HIPERFACE®Safety” - 8014120.
2.2 Uso conforme alla destinazione
Il sistema sicuro Motorfeedback è previsto, date le relative dotazioni, per l’eserci‐
zio dinamico e preciso di servocomandi con retroazione.
Il sistema complessivo, costituito da testa di lettura, elemento di misura, sistema
di valutazione, servoconvertitore di frequenza e motore, forma un comando con
retroazione.
L’impiego orientato alla sicurezza di sistemi di sicurezza Motorfeedback con
l’interfaccia HIPERFACE®si basa sull’applicazione in abbinamento a motori lineari.
Le seguenti informazioni possono essere ricavate dai segnali di posizione digitali
del sistema di sicurezza Motorfeedback accoppiato direttamente all’albero
motore:
•
nei motori lineari le informazioni sul numero di giri o sulla velocità e le infor‐
mazioni sulla commutazione.
Il sistema di sicurezza Motorfeedback può essere utilizzato, in combinazione con
un sistema di azionamento conforme a IEC 61800-5-2, in applicazioni di sicurezza
fino alla categoria 3 e PL d secondo EN ISO 13849 o SILCL2 secondo EN 62061.
Esso soddisfa i requisiti della Direttiva Macchine 2006/42/CE e serve a suppor‐
tare il sistema di azionamento per garantire:
•
Funzioni di sicurezza basate sull’informazione certa della posizione o della
velocità del sistema di sicurezza Motorfeedback.
•
Per funzioni di sicurezza basate sulla posizione assoluta certa, il sistema di
sicurezza Motorfeedback fornisce all’accensione solo un canale senza una
diagnosi di sicurezza. Un secondo canale deve essere realizzato dall’utente
con l’ausilio di altre misure. Questo secondo canale può essere messo a
disposizione dall’utente attraverso il salvataggio della posizione del sistema
di sicurezza Motorfeedback prima dello spegnimento e il confronto con la
posizione iniziale del sistema di sicurezza stesso durante la successiva
accensione. Solo se i valori coincidono è possibile utilizzare la posizione
assoluta in modo orientato alla sicurezza. In caso contrario, l’utente deve
eseguire una corsa di riferimento. Senza il secondo canale, ad ogni accen‐
sione del sistema di sicurezza Motorfeedback deve essere eseguita una
corsa di riferimento per confermare la posizione assoluta.
Il sistema di sicurezza Motorfeedback non è in grado di creare autonomamente
uno stato sicuro del sistema di azionamento. Il sistema di azionamento deve
creare lo stato sicuro come reazione ad un guasto visualizzato del sistema di sicu‐
rezza Motorfeedback.
La trasmissione dei segnali del sensore al sistema di valutazione avviene
mediante un´interfaccia HIPERFACE®. Il sistema di sicurezza Motorfeedback,
abbinato a un sistema di azionamento di categoria 3 (EN ISO 13849), SILCL2 (EN
62061) o PL d (EN ISO 13849), si presta per applicazioni di sicurezza. Se si utiliz‐
zano esclusivamente uscite analogiche di segnale incrementale (seno/coseno)
per funzioni di sicurezza del servomotore basate sulla velocità, il sistema di sicu‐
rezza Motorfeedback soddisfa i requisiti della norma EN 61800-5-2.
Il sistema di sicurezza Motorfeedback non supporta i tipi di funzionamento all
´insegna della sicurezza connessi a una posizione assoluta.
Per il riconoscimento di tutte le variazioni non ammesse nella relazione di seno e
coseno si ricorre al monitoraggio lunghezza vettori. Con TTK50S/TTK70S la lun‐
ghezza del vettore può scostarsi al massimo di +/- 15% (vedi capitolo 6.2.
Manuale d´implementazione “HIPERFACE® Safety” - 8014120).
Uno scostamento maggiore del +/-15% rappresenta un superamento dei limiti di
lunghezza dei vettori e necessita di una relativa reazione all´errore del drive.
AVVERTENZA
Il sistema di sicurezza Motorfeedback può essere utilizzato solo entro i limiti
dei dati tecnici, delle dimensioni e delle tolleranze dei disegni quotati nonché
delle condizioni di funzionamento prescritti e indicati. Inoltre devono essere
rispettate anche le coppie di serraggio indicate.
In caso di qualsiasi altro utilizzo o qualsiasi modifica del dispositivo - anche in
fase di montaggio e installazione - decade ogni diritto di garanzia nei con‐
fronti di SICK STEGMANN GmbH.
2.3 Uso non conforme alle prescrizioni
Il sistema di sicurezza Motorfeedback può essere montato con un kit di fissaggio
definito (2105618). È necessario eseguire il collegamento tra sistema di aziona‐
mento e sistema di sicurezza Motorfeedback in maniera rigida.
Il sistema di sicurezza Motorfeedback non può supportare altre funzioni di sicu‐
rezza senza provvedimenti aggiuntivi che si basino sulla posizione assoluta che
viene trasmessa sul canale di parametri RS 485.
L’accoppiamento meccanico del sistema di misurazione all’azionamento è rile‐
vante per la sicurezza. La norma EN 61800-5-2, tabella D16 richiede in questo
caso una procedura senza errori per quanto riguarda l’attivazione del collega‐
mento meccanico tra sistema di misurazione e azionamento. È necessario rispet‐
tare le disposizioni per il fissaggio del sistema di misurazione.
Qualora durante l’applicazione non sia possibile escludere con certezza questi
impulsi, è necessario eseguire test adeguati dell’intero sistema di azionamento.
2.4 Qualifiche richieste al personale
Il sistema di sicurezza Motorfeedback TTK50S/TTK70S può essere montato,
messo in esercizio, collaudato, revisionato e utilizzato solo da personale di sicu‐
rezza qualificato.
Il personale di sicurezza è qualificato se soddisfa i seguenti requisiti:
•
Preparazione tecnica adatta del personale
•
Istruzioni dal gestore della macchina sull´utilizzo della stessa e sulle norme
di sicurezza in vigore
•
Accesso alle presenti istruzioni per l’uso
3 Progettazione
AVVERTENZA
La tensione di alimentazione deve essere generata da sistemi PELV (EN
50178). Il sistema di sicurezza Motorfeedback è conforme alla classe di pro‐
tezione III secondo DIN EN 61140. Se la tensione di alimentazione non viene
generata da sistemi PELV, l’utente deve attuare altre misure che garantiscano
una separazione sicura da componenti che conducono tensione di rete.
4 Montaggio
Questo capitolo descrive il montaggio del sistema Motorfeedback di sicurezza.
4.1 Sicurezza
INDICAZIONE
Il montaggio può essere eseguito solo ai sensi del grado di protezione IP indi‐
cato (vedi scheda tecnica).
È necessario eventualmente proteggere il sistema da influssi ambientali dan‐
nosi come ad es. spruzzi d’acqua, polveri, urti, temperatura.
INDICAZIONE
Durante il montaggio evitare al sistema di sicurezza Motorfeedback urti e
scosse.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 17
Page 18

INDICAZIONE
required tape length = measuring section + 60 mm (2.36 inch)
measuring section5
(0.20)
5
(0.20)
50 (1.97)
Travel direction
Marking on sensor Marking on strip
Il sistema di sicurezza Motorfeedback può essere montato con un kit di fis‐
saggio definito (2105618 / 2109583). In questo modo è consentita un’acce‐
lerazione < 100 m/s² (vedi EN 61800-5.2, tabella D16).
AVVERTENZA
È necessario evitare l’influsso dovuto ai campi magnetici. In particolare nes‐
suno dei campi magnetici (ad es. i magneti di fissaggio o altri magneti perma‐
nenti) deve entrare in contatto con il nastro magnetico.
•
I campi magnetici estranei > ca. 3 ... 4 kA/m (3.8 ... 5 mT) influenzano
la precisione di misura.
•
Le intensità di campo > 150 kA/m (> 190 mT) modificano la magnetiz‐
zazione del nastro magnetico in modo irreversibile.
AVVERTENZA
Utilizzare le viti una sola volta. Dopo lo smontaggio del sistema di sicurezza
Motorfeedback:
sul collegamento tra sistema di azionamento e sistema di sicurezza
b
Motorfeedback pulire i filetti coinvolti dai materiali residui.
In caso di nuovo montaggio utilizzare una nuova vite (inutilizzata) con
b
sigillante fluido per viti sul filetto.
In caso di nuovo montaggio è necessario rifornirsi del kit di fissaggio
b
(2105618 / 2109583) di SICK.
Smontaggio
INDICAZIONE
Se è necessario smontare il sistema di sicurezza Motorfeedback, eseguire le
operazioni di montaggio nella sequenza inversa.
4.2 Montaggio nastro magnetico
INDICAZIONE
Per motivi tecnici è necessario tenere in considerazione la misurazione della
lunghezza (rispetto al percorso di misurazione):
•
TTK50S: ≥ 60 mm
•
TTK70S: ≥ 80 mm
INDICAZIONE
Se si incollano dei nastri lunghi, si deve togliere la pellicola protettiva del
nastro adesivo su un tratto breve per fissare il nastro. Dopo di che si procede
con l’allineamento del nastro. Dopo l’allineamento si può togliere lateral‐
mente la pellicola protettiva sul resto della lunghezza con contemporanea
pressione del nastro.
Detergere con cura la superficie di fissaggio.
b
Rimuovere la pellicola protettiva dal nastro adesivo sul nastro magnetico.
b
Incollare il nastro magnetico tenendo in considerazione la direzione di proce‐
b
dura.
Detergere con cura la superficie del nastro magnetico.
b
Rimuovere la pellicola protettiva dal nastro adesivo sul nastro di copertura.
b
Incollare il nastro di copertura (far leggermente sovrapporre su entrambe le
b
estremità).
Assicurarsi che non si stacchino entrambe le estremità sovrapposte del
b
nastro di copertura.
4.3 Esempi di montaggio del nastro magnetico
Figura 2: Esempio di montaggio: nastro di protezione obliquo
Il tipo di montaggio semplice con nastro di protezione obliquo è consigliabile solo
in ambienti particolarmente protetti.
Figura 1: Montaggio nastro magnetico
INDICAZIONE
Il montaggio deve essere piano rispetto alla superficie di montaggio ossia al
percorso da misurare. Le ondulazioni peggiorano sempre la precisione di
misura. È necessario garantire una protezione meccanica sufficiente (ad es.
da urti e vibrazioni).
INDICAZIONE
Per ottenere i rivestimenti ottimali, è necessario rimuovere tutte le sostanze
estranee che impediscano l’incollaggio (oli, grassi, polveri, ecc.) con dei
detergenti che evaporino velocemente e lascino meno residui possibile.
Come detergenti sono adatti tra gli altri i chetoni (acetone) o gli alcol.
INDICAZIONE
Le superfici di incollaggio devono essere asciutte ed è necessario incollare
con la massima pressione possibile. La temperatura di incollaggio ottimale è
tra i 20 °C e i 30 °C nelle stanze asciutte.
Figura 3: Esempio di montaggio: nastro magnetico avvitato sulla parte anteriore
Figura 4: Esempio di montaggio: nastro magnetico avvitato piatto
In ambiente non protetto c’è il pericolo che il nastro si frammenti. In questi casi
sono adatti i tipi di montaggio con nastro magnetico avvitato sulla parte anteriore
o piatto.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 18
Page 19

Figura 5: Esempio di montaggio: nastro magnetico in una fessura
0.6 (0.02)
0.6 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
0.2 (0.01)
0.4 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
< ± 1°
2
1
1
2
3
4
Il montaggio in una fessura offre la protezione ottimale che deve avere una pro‐
fondità tale da poter garantire la completa collocazione all’interno.
4.4 Montaggio testa di lettura
AVVERTENZA
È necessario rispettare le dimensioni di tolleranza e distanza sull’intero tratto
di misura. Degli scostamenti di montaggio molto grandi provocano dei valori
non plausibili di posizionamento.
1. Montare la vite a testa svasata (2) e la piastra di montaggio (1) come ripor‐
tato nell’immagine.
2. Verificare la distanza sensore-nastro con il supporto delle istruzioni sulla
distanza.
3. Assicurare le viti a testa svasata (2) con il sigillante per viti.
4. Fissare le viti a testa svasata. Coppia di serraggio: 1,41 ± 0,1 Nm.
Figura 6: Tolleranze di montaggio TTK50S
Figura 9: Montaggio testa di lettura TTK70S
1. Montare la vite in titanio (4), la piastra di sicurezza (3), la rondella (2) e il
connettore femmina (1) come riportato nell’immagine.
2. Verificare la distanza sensore-nastro con il supporto delle istruzioni sulla
distanza.
3. Assicurare la vite con il sigillante per viti.
4. Fissare le viti in titanio. Coppia di serraggio: 2,5 ± 0,1 Nm.
5 Installazione elettrica
INDICAZIONE
Per l’installazione del sistema di sicurezza Motorfeedback attenersi alle istru‐
zioni per l’uso specifiche del sistema di azionamento esterno, ovvero del
Figura 7: Tolleranze di montaggio TTK70S
AVVERTENZA
Non appena sia stato collocato il nastro di copertura, la scritta del nastro non
è più visibile. Si raccomanda di marcare il nastro di copertura con la voce
relativa.
INDICAZIONE
La direzione della freccia dell’iscrizione del sensore deve coincidere con la
direzione della freccia dell’iscrizione del nastro.
La posizione del sensore è definita esattamente rispetto al nastro magnetico.
Durante il montaggio è necessario osservare in particolare il rispetto di una fes‐
sura d’aria tra nastro e sensore su tutto il tratto di misura, indipendentemente dal
movimento avvenuto o mancato del nastro o del sensore. È possibile utilizzare
come supporto per il montaggio, le istruzioni allegate riguardo alla distanza.
Il montaggio della testa di lettura TTK50S deve avvenire esclusivamente con il kit
di fissaggio (2109583). Il kit di fissaggio è composto da una piastra di montaggio
e da due viti a testa svasata.
Il montaggio della testa di lettura TTK70S deve avvenire esclusivamente con il kit
di fissaggio (2105618). Il kit di fissaggio è composto da due viti in titanio, piastre
di sicurezza, connettori femmine e rondelle.
Figura 8: Montaggio testa di lettura TTK50S
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 19
sistema di comando superiore!
INDICAZIONE
Durante il montaggio garantire l’assenza di tensione sulle macchine/sugli
impianti interessati!
5.1 Schermatura
INDICAZIONE
Si deve scegliere il luogo d’impiego in maniera tale che i disturbi induttivi e
capacitivi non possano agire sul sensore o il suo cavo di collegamento.
INDICAZIONE
Per un esercizio privo di anomalie è necessaria una schermatura adatta
dell’encoder al peso o sullo schermo del motore.
INDICAZIONE
Installare il cavo con una diminuzione della trazione. Se necessario, provve‐
dere una catena di trascinamento o un flessibile di protezione.
5.2 Segnali del sistema di sicurezza Motorfeedback
Il sistema di sicurezza Motorfeedback dispone dei seguenti segnali:
Interfaccia HIPERFACE®:
•
Tensione di alimentazione US; il range della tensione di esercizio è compreso
tra +7 V ... +12 V, la tensione di alimentazione consigliata è pari a +8 V.
•
GND - collegamento di massa, separato galvanicamente dalla custodia. La
tensione di riferimento è US.
•
+ SIN - canale dei dati di processo, segnale seno di 1 Vpp con un offset sta‐
tico di REFSIN.
•
REFSIN - canale dei dati di processo, una tensione statica di +2,5 V che
serve come tensione di riferimento per + SIN.
•
+ COS - canale dei dati di processo; segnale coseno di 1 Vpp con un offset
statico di REFCOS.
•
REFCOS - canale dei dati di processo; una tensione statica di +2,5 V, ten‐
sione di riferimento per + COS.
•
Il canale dei parametri dati ± – RS485: segnale di dati positivo/negativo; il
canale di parametri è un´interfaccia asincrona semiduplex, che dal punto di
vista fisico corrisponde alla specifica EIA RS485. Mediante tale canale è
possibile richiedere dati al sistema di sicurezza Motorfeedback con ordini
diversi oppure memorizzare dati specifici dell´utente, quali ad es. l´offset di
posizione in E2PROM del sistema di sicurezza Motorfeedback.
Page 20

5.3 Panoramica dei collegamenti
5.3.1 M12, 8 pin
INDICAZIONE
Siamo a vostra disposizione per lo smaltimento del dispositivo. Contattateci.
9 Dati tecnici
Dati tecnici
TTK50S TTK70S
Prestazione
Angolo di misura
Lunghezza periodo 1 mm
Fig. 6: collegamento M12 a 8 pin
Occupazione pin collegamento M12, 8 pin
PIN Segnale
1 REFSIN
2 + SIN
3 REFCOS
4 +COS
5 dati +
6 dati 7 GND
8 US
- Potenziale della custodia, schermo sul connettore maschio
della custodia.
5.3.2 uscita del cavo
Occupazione del cavo, uscita del cavo
Colore dei fili Segnale
Marrone REFSIN
Bianco + SIN
Nero REFCOS
Lunghezza di misura max. 1.000 mm max. 4.000 mm
Lunghezza nastro magnetico
Precisione di sistema (temperatura ambiente) ± 10 μm (+20 °C)
Ripetibilità < 5 μm
Margine di conversione valore di misura < 10 μm
Interfacce
Tipo di codice binario
Segnali d´interfaccia canale dei dati di processo analogico, differenziale
Canale parametri RS 485 digitale
Memoria disponibile in EEPROM 2048 1.792 byte
Meccanica/elettricità
Dimensioni/quote Vedere disegno quotato
Peso testa di lettura 0,06 kg 0,08 kg
Peso nastro magnetico 0,18 kg/m
Materiale testa di lettura Pressofusione di zinco
Nastro magnetico 17410 ferrite dura 9/28 P
Velocità di passaggio ≤ 10 m/s
velocità di passaggio per raggiungere la posizione
assoluta in modo attendibile
Rosa +COS
Grigio dati +
Tipo di collegamento cavo, 8 fili
Verde dati Blu GND
Rosso US
Griglia Cu Schermo
Interfaccia elettrica HIPERFACE
Range d’esercizio e di tensione di alimentazione 7 V DC … 12 V DC
Tensione di alimentazione consigliata 8 V DC
Corrente di esercizio senza carico ≤ 55 mA
6 Messa in servizio
Per la messa in servizio dei sistemi di sicurezza Motorfeedback si prevede che il
costruttore del sistema di azionamento collegato debba soddisfare, in fase di
posa del sistema stesso, i requisiti di sicurezza descritti nel manuale d’implemen‐
tazione “HIPERFACE®Safety” - 8014120.
6.1 Verifiche
Per l’esercizio non sono richiesti ulteriori misure di collaudo.
AVVERTENZA
Il sistema di sicurezza Motorfeedback ha una durata d’uso massima (vedi
scheda tecnica) scaduta la quale va comunque messo fuori servizio.
Bisogna quindi osservare, oltre alla durata di vita, anche la durata di conser‐
vazione. Il limite che viene raggiunto per primo, a seconda dell’applicazione,
determina il momento in cui è necessario eseguire la messa fuori servizio.
L’anno di costruzione del sistema di sicurezza Motorfeedback viene indicato
mediante un codice (YYWW) sull’etichetta dell’apparecchio o nell’etichetta
dell’imballaggio nel numero di serie (SN).
YY = indica l’anno (senza il secolo).
WW = indica la settimana di calendario dell’ultimo processo di produzione.
7 Manutenzione
Il sistema di sicurezza Motorfeedback è esente da manutenzione. In caso di difetti
non è possibile eseguire alcuna riparazione. In caso di reclami, contattateci.
Se è molto sporca si può pulire la superficie del nastro magnetico eventualmente
con un panno morbido.
8 Messa fuori servizio
8.1 Tutela dell’ambiente
Il sistema di sicurezza Motorfeedback è concepito in modo da ridurre il più possi‐
bile l’impatto ambientale. Esso consuma soltanto un minimo di energia e di
risorse.
Rispettare l’ambiente anche sul posto di lavoro. Osservare pertanto le
b
seguenti informazioni sullo smaltimento.
8.2 Smaltimento
Smaltire sempre gli apparecchi inutilizzati o non riparabili secondo le disposizioni
Tolleranze di montaggio
Distanza di lettura sensore/nastro ≤ 0,3 mm
Deviazione laterale
Errore di allineamento < ± 1°
Dati ambientali
Intervallo temperatura di esercizio - 30 °C ... +80 °C
Campo di temperature di stoccaggio - 40 °C ... +85 °C, senza imballaggio
Umidità relativa dell’aria/condensa 100%, condensa ammessa
Resistenza agli urti 30 g, 6 ms (EN 60068-2-27)
Resistenza alle vibrazioni
EMC EN 61000-6-2, EN 61000-6-3 2 2)
Grado di protezione IP 65
Coefficiente di temperatura nastro magnetico (11 ± 1) μm/K/m
Massima intensità di campo ambiente ammessa
Massima intensità di campo ammessa < 150 kA/m (< 190 mT)
Parametri di sicurezza
Livello d’integrità di sicurezza
PL (Performance Level) PL d (EN ISO 13849)
Categoria 3 (EN ISO 13849)
probabilità di un malfunzionamento pericoloso
all’ora (PFHD)
5)
TM (TM)
MTTFd: intervallo di tempo fino al verificarsi di un
guasto pericoloso
Velocità di test non richiesta
di smaltimento in vigore, specifiche per ogni paese.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 20
0,244 μm con interpolazione dei
segnali seno/coseno ad es. con 12 bit
Lunghezza di
misura
+60 mm
Lunghezza di
misura
+80 mm
1,3 m/s
cavo, 8 fili
Connettore
maschio M12, 8
pin
®
1)
+0,6 mm,
-0,6 mm
20 g, 10 Hz … 2.000 Hz (EN
60068-2-6)
2)
< 3 kA/m ... 4 kA/m (3,8 mT ... 5 mT):
per rispettare la classe di precisione
SIL2 (IEC 61508), SILCL2 (EN 62061)
4)
2,02 x 10
≤ 65 mA
+0,4 mm,
-0,2 mm
-8
1)
20 anni (EN ISO 13849)
> 100 anni (EN ISO 13849)
3)
Page 21

TTK50S TTK70S
24
17
20
14
Ø 3,3
Ø 6
2
10
25
50
~ 12
6
14
(0.55)
5.5
(0.22)
10
(0.39)
5.3
(0.21)
10–0,1
(0.39)
0
M12 x 1
14
(0.55)
61.5 (2.42)
40 (1.57)
8
(0.31)
13
(0.51)
6.6 (0.26)
5.5 (0.22)
70 (2.76)
30 (1.18)
23.6 (0.93)
8
(0.31)
70 (2.76)
40 (1.57)
30 (1.18)
23.6
(0.93)
~ 18
(0.71)
50
(1.97)
2.5
(0.10)
21
(0.83)
14
(0.55)
5.3
(0.21)
5.5 (0.22)
10 (0.39)
Größe Lesekopf
5 0 50 mm
7 0 70 mm
Elektrische Schnittstelle
H HIPERFACE
®
X Linear
Anschlussart
A Stecker M12, 8-polig
J Leitung, 8-adrig, 0,5 m
I Leitung, 8-adrig, 1 m
Q Leitung, 8-adrig, 2 m
M Leitung, 8-adrig, 5 m
Speicherbereich
K 0 2 E²PROM 2048
T T K S - 0 - K 0 2
Tempo richiesto max. Costante (segnali analogici)
Precisione orientata alla sicurezza
5)
± 0,25 mm (= ±¼ lunghezza dei poli)
Passo di misurazione di sicurezza 0,25 mm
1)
Durante il processo di compensazione ca. 100 mA.
2)
Se il sistema di sicurezza Motorfeedback è montato in una custodia metallica, conforme‐
mente alle norme indicate viene garantita l´EMC secondo cui il sistema di sicurezza
Motorfeedback è collegato al punto di messa a terra centrale del regolatore del motore
mediante una schermatura del cavo.
Il collegamento GND-(0V) della tensione di alimentazione è anch’esso collegato a terra
nello stesso punto. Se si utilizzano altri tipi di schermatura, l’utente deve eseguire propri
test specifici.
2)
Il grado di protezione (secondo IEC 60529) viene raggiunta con il controconnettore inse‐
rito.
3)
Il massimo influsso campo estraneo viene raggiunto se il valore di posizione si scosta di
oltre 5 μm dal valore originario (senza influsso campo estraneo). Questo valore viene
raggiunto se nel luogo del sensore si verifica un´intensità di campo di 3 kA/m ... 4 kA/m
(3,8 mT ... 5 mT) in aggiunta all´intensità di campo del nastro magnetico.
4)
Per informazioni dettagliate sulla progettazione esatta della macchina/dell’impianto con‐
tattare la filiale SICK di competenza.
5)
i valori indicati si riferiscono a un grado di copertura diagnostica del 90%, raggiungibile
con il sistema di azionamento esterno. In caso di risonanza si devono eseguire test
adatti del sistema di azionamento complessivo.
9.1 Disegni quotati
Figura 12: Disegni quotati TTK70S con uscita del cavo (tutte le dimensioni in mm)
10 Dati di ordinazione
Figura 10: Disegni quotati TTK50S con uscita del cavo (tutte le dimensioni in mm)
Figura 13: Codice d’ordine
11 Appendice
11.1 Dotazione di fornitura
•
Sistema di sicurezza Motorfeedback
•
Indicazioni di sicurezza generali
•
Istruzioni per l´uso
Ulteriori accessori sono riportati nell´informazione di prodotto in www.sick.com
11.2 Conformità
Figura 11: Disegni quotati TTK70S con connettore maschio M12 (tutte le dimen‐
sioni in mm)
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 21
I sistemi di sicurezza Motorfeedback TTK50 / TTK70S sono stati realizzati
secondo le direttive elencate qui di seguito:
•
Direttiva Macchine 2006/42/EG
•
EMC - Direttiva 2014/30/UE
La versione integrale della dichiarazione di conformità UE è disponibile in Inter‐
net, alla homepage di SICK:
www.sick.com
Page 22

N O T I C E D ’ I N S T R U C T I O N f r
Systèmes fiables de feedback moteur
1 À propos de ce document
Veuillez lire attentivement cette notice d'utilisation avant de travailler avec le
système Feedback-moteur, de le monter, de le mettre en service ou de procéder à
sa maintenance.
Ce document est une traduction de la notice d'utilisation originale.
1.1 Objet de ce document
Cette notice d'utilisation guide le personnel technique du fabricant ou de l'exploi‐
tant de la machine lors du montage, de l'installation électrique, de la mise en ser‐
vice, de l'exploitation et de la maintenance du système Feedback-moteur
sécurisé.
Elle doit être accessible à toute personne utilisant le système Feedback-moteur
sécurisé.
En outre, la planification et la mise en œuvre de capteurs de sécurité, tels que le
système Feedback-moteur, requièrent des connaissances techniques non four‐
nies dans ce document.
Il est fondamental de respecter les prescriptions réglementaires et légales lors de
l'exploitation du système Feedback-moteur sécurisé.
1.2 Symboles et conventions documentaires
AVERTISSEMENT
Les consignes de sécurité renvoient à des instructions concrètes pour le
montage et l'installation sécurisés du système Feedback-moteur.
Elles permettent de prévenir les accidents.
Lisez et suivez attentivement les consignes de sécurité.
REMARQUE
Signale des astuces et recommandations utiles.
Les instructions d'action sont signalées par une flèche. Lisez et suivez atten‐
b
tivement les instructions d'action.
1.3 Documents annexes
•
Manuel d´utilisation « HIPERFACE® Safety » - 8014120, version 12.2010 (ou
plus récente)
•
8010701, version 04.2008 (ou plus récente)
2 Pour votre sécurité
Ce chapitre vise à assurer votre sécurité et celle des utilisateurs de l'installation.
2.1 Consignes de sécurité générales
Pour le montage et l'utilisation du système Feedback-moteur ainsi que pour sa
mise en service et les contrôles techniques réguliers, respecter impérativement
les prescriptions légales nationales et internationales :
•
Directive machines 2006/42/CE
•
Directive d'utilisation des outils de travail 2009/104/CE
•
Réglementation sur la prévention des accidents et règles de sécurité
•
Autres règles de sécurité applicables
Le fabricant et l'opérateur de la machine sur laquelle sera installé le système
Feedback-moteur sont tenus vis-à-vis des autorités d'appliquer rigoureusement
l'ensemble des prescriptions et règles de sécurité en vigueur.
Le fabricant du système d´entraînement relié doit, lors du dimensionnement du
système d´entraînement, satisfaire aux exigences de sécurité, décrites dans le
manuel d´utilisation « HIPERFACE® Safety » - 8014120.
2.2 Utilisation conforme
Le système Feedback-moteur fiable, en raison de son équipement, est prédestiné
au fonctionnement dynamique et précis des circuits de régulation avec boucle
d’asservissement.
Le système complet, constitué d’une tête de lecture, d’un profilé magnétique, d
´un système d’analyse, d’un servo-convertisseur et d’un moteur, forme un circuit
de régulation.
L’utilisation sécurisée de systèmes Feedback-moteur fiables avec interface HIPER‐
FACE DSL® se réfère à l’utilisation en liaison avec des moteurs linéaires.
Les informations suivantes peuvent être déduites des signaux de position
numériques du système Feedback-moteur fiable directement couplé sur l’arbre
moteur.
•
chez les moteurs linéaires, il s’agit des informations sur les tours ou la
vitesse ainsi que l’information de commutation.
Le système Feedback-moteur fiable, en combinaison avec un système
d’entraînement selon CEI 61800-5-2, peut être utilisé dans des applications de
sécurité jusqu’à la catégorie 3 et PL d selon EN ISO 13849 ou niveau d’intégrité
de la sécurité SILCL2 selon EN 62061.
Il satisfait aux exigences de la directive machine 2006/42/CE et assiste le
système d’entraînement en matière de garantie :
•
Des fonctions de sécurité qui se basent sur l’information de position ou de la
vitesse sûre du système Feedback-moteur fiable.
•
Pour des fonctions de sécurité qui se basent sur la position absolue sûre,
lors du démarrage, le système Feedback-moteur fiable ne fournit qu’un
canal sans diagnostic de sécurité. Un second canal doit être réalisé par l’uti‐
lisateur à l’aide d’autres mesures. Ce second canal peut être mis à disposi‐
tion par l’utilisateur en enregistrant la position du système Feedback-moteur
fiable avant l’extinction et en la comparant avec la position de démarrage du
système Feedback-moteur fiable lors du prochain démarrage. Ce n’est que
lorsque les valeurs sont totalement identiques que la position absolue peut
être utilisée de manière sécurisée. Autrement, l’utilisateur doit procéder à
une course de référence. Sans un second canal, il faut exécuter une course
de référence lors de chaque démarrage du système Feedback-moteur fiable
afin de confirmer la position absolue.
Le système Feedback-moteur fiable n’est pas en mesure d’instaurer un état sûr
du système d’entraînement de manière autonome. Le système d’entraînement
doit instaurer l’état sûr sous forme de réaction à une erreur affichée du système
Feedback-moteur fiable.
La transmission des signaux du capteur au système d´analyse est effectuée via
une interface HIPERFACE® Associé à un système d´entraînement de catégorie 3
(EN ISO 13849), de niveau SILCL2 (EN 62061) ou de niveau PL d (EN ISO
13849), le système Feedback-moteur fiable est adapté aux applications de
sécurité. Lors de l´utilisation exclusive des sorties de signaux incrémentiels
(sinus/cosinus) pour des fonctions de sécurité basées sur la vitesse de l
´entraînement, le système Feedback-moteur fiable satisfait aux exigences de la
norme EN 61800-5-2.
Le système Feedback-moteur fiable ne prend pas en charge les types de fonction‐
nement de sécurité qui sont liés au positionnement absolu ou à la position abso‐
lue.
Pour détecter toute modification non autorisée dans le rapport Sinus et Cosinus,
on a recours à la surveillance de la longueur vectorielle. Chez le TTK50S/TTK70S,
la longueur vectorielle peut différer de +/- 15 % maximum (voir chapitre 6.2.
Manuel d´utilisation « HIPERFACE® Safety » - 8014120).
Un écart plus important que +/- 15 % constitue une violation des limites de lon‐
gueur vectorielle et exige une réponse adéquate de l’entraînement à l´erreur.
AVERTISSEMENT
Le système Feedback-moteur fiable ne doit être utilisé uniquement dans les
limites des caractéristiques techniques, dimensions et tolérances et des
conditions d’exploitation prescrites et spécifiées ; il faut par ailleurs respecter
les couples de serrage indiqués.
Pour toute autre utilisation, aussi bien que pour les modifications apportées
à l´appareil, y compris dans le cadre du montage et de l’installation, la
société SICK STEGMANN GmbH décline toute responsabilité.
2.3 Utilisation non conforme
Le système Feedback-moteur fiable ne doit être monté qu’avec un kit de fixation
défini (2105618). La connexion entre le système d’entraînement et le système
Feedback-moteur fiable doit être exécutée de manière rigide.
Le système Feedback-moteur fiable ne peut pas soutenir de fonctions de sécurité
sans mesures supplémentaires basant sur la position absolue qui sont trans‐
mises sur le canal de paramètres RS 485.
Le couplage mécanique du système de mesure à l’entraînement est déterminant
pour la sécurité. La norme EN 61800-5-2, tableau D16, exige ici une exclusion
des erreurs concernant le détachement de la connexion mécanique entre le
système de mesure et l’entraînement. Il convient de respecter les indications
pour la fixation du système de mesure.
S’il est impossible d’exclure de façon fiable des excitations dans l’application, il
faut réaliser des tests adaptés de l’ensemble du système d’entraînement.
2.4 Exigences relatives aux qualifications du personnel
Seul le personnel qualifié est habilité à procéder au montage, à la mise en ser‐
vice, au contrôle, à la maintenance et à l´utilisation du système Feedback-moteur
fiable TTK50S/TTK70S.
On entend par personnel qualifié toute personne remplissant l´ensemble des
conditions préalables suivantes :
•
Formation technique adaptée du personnel
•
Ayant reçu une formation relative à la commande et aux directives de
sécurité en vigueur par l´exploitant de la machine
•
Ayant accès à cette notice d’instruction
3 Conception
AVERTISSEMENT
La tension d’alimentation doit être générée depuis des systèmes PELV (EN
50178). Le système Feedback-moteur fiable correspond à la classe de pro‐
tection III selon DIN EN 61140. Si la tension d’alimentation n’est pas générée
depuis des systèmes PELV, l’utilisateur doit prendre d’autres mesures assu‐
rant une isolation sûre des pièces conductrices de tension réseau.
4 Montage
Ce chapitre décrit la procédure de montage du système Feedback-moteur
sécurisé.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 22
Page 23

4.1 Sûreté
required tape length = measuring section + 60 mm (2.36 inch)
measuring section5
(0.20)
5
(0.20)
50 (1.97)
Travel direction
Marking on sensor Marking on strip
REMARQUE
Le montage ne doit être exécuté que selon l’indice de protection indiqué (voir
Caractéristiques techniques).
Le système doit le cas échéant être protégé contre des conditions environne‐
mentales défavorables comme p. ex. les éclaboussures, la poussière, les
chocs, le température.
REMARQUE
Éviter les chocs sur le système Feedback-moteur fiable durant le montage.
REMARQUE
Le système Feedback-moteur fiable ne doit être monté qu’avec un kit de fixa‐
tion défini (2105618 / 2109583). Une accélération de < 100 m/s² est alors
admissible (voir EN 61800-5.2, tableau D16).
AVERTISSEMENT
L’influence de champs magnétiques doit être évitée. En particulier, aucun
champ magnétique (p. ex. aimants de retenue ou autres aimant permanents)
ne doit entrer en contact direct avec la bande magnétique.
•
Champs magnétiques étrangers > env. 3 ... 4 kA/m (3.8 ... 5 mT).
•
Intensités du champ > 150 kA/m (> 190 mT) modifient la magnétisa‐
tion de la bande magnétique de façon irréversible.
AVERTISSEMENT
Les vis ne doivent être utilisées qu’une seule fois. Après le démontage du
système Feedback-moteur fiable :
enlever les résidus sur les filetages concernés sur la connexion entre le
b
système d’entraînement et le système Feedback-moteur fiable.
en cas de montage réitéré, utiliser une vis nouvelle (non utilisée) avec
b
frein de vis liquide sur le filetage.
en cas de montage réitéré, le kit de fixation (2105618 / 2109583) doit
b
être acheté chez SICK.
Démontage
REMARQUE
Si un démontage du système Feedback-moteur fiable est nécessaire, les
étapes de montage sont à réaliser dans l’ordre inverse.
4.2 Montage bande magnétique
REMARQUE
Pour des raisons techniques, il faut prendre en compte une surmesure (par
rapport à la distance de mesure) :
•
TTK50S : ≥ 60 mm
•
TTK70S : ≥ 80 mm
REMARQUE
Les surfaces adhésives doivent être sèches et il faut coller avec une pression
maximale. La température d’encollage est optimale entre 20 °C et 30 °C
dans des pièces non humides.
REMARQUE
Lors de l’encollage de bandes larges, il faut retirer le film de protection du
ruban adhésif sur une courte distance afin de fixer la bande. Ensuite, il faut
aligner la bande. Après l’alignement, le film de protection peut être retiré vers
le côté sur la longueur résiduelle en appuyant en même temps sur la bande.
Nettoyer soigneusement la surface de fixation.
b
Retirer le film protecteur du ruban adhésif de la bande magnétique.
b
Coller la bande magnétique en prenant en compte le sens de la course.
b
Nettoyer soigneusement la surface de la bande magnétique.
b
Retirer le film protecteur du ruban adhésif sur la bande de recouvrement.
b
Coller la bande de recouvrement (superposer légèrement aux deux
b
extrémités).
Protéger les extrémités superposées de la bande de recouvrement contre un
b
détachement éventuel.
4.3 Exemples de montage bande magnétique
Illustration 2: Exemple de montage - bande de protection biaisée
Le type de montage simple grâce à la bande de protection biaisée n’est recom‐
mandé que dans un environnement très protégé.
Illustration 3: Exemple de montage - bande magnétique, vissage frontal
Illustration 1: Montage bande magnétique
REMARQUE
Le montage doit se faire de manière plane par rapport à la surface de
mesure ou à la distance à mesurer. Les ondulations nuisent toujours à l’exac‐
titude de mesure. Il faut assurer une protection mécanique suffisante (p. ex.
contre les coups et les vibrations).
Illustration 4: Exemple de montage - bande magnétique, vissage sur toute la sur‐
face
Dans les environnements non protégés, il y a risque de détachement. Dans de
tels cas, les types de montage avec une bande magnétique vissée sur le front ou
sur toute la surface sont mieux adaptés.
REMARQUE
Afin d’obtenir des encollages parfaits, toutes les substances étrangères antiadhésives (huile, graisse, poussière etc.) doivent être éliminées avec des pro‐
duits nettoyants qui s’évaporent sans résidus. Les produits nettoyants
adaptés sont notamment les cétones (acétone) ou les alcools.
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 23
Page 24

Illustration 5: Exemple de montage - bande magnétique dans une rainure
0.6 (0.02)
0.6 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
0.2 (0.01)
0.4 (0.02)
≤ 0.3 (0.01)
≤ 0.2 (0.01)
1 2
< ± 1°
2
1
1
2
3
4
Le montage dans une rainure qui doit être aussi profonde que la bande
magnétique y soit complètement intégrée offre une protection optimale.
4.4 Montage tête de lecture
AVERTISSEMENT
Respecter les tolérances et les écarts sur l’ensemble de la plage de mesure.
Des écarts de montage plus importants produisent des valeurs de position
non plausibles.
1. Monter la vis à tête fraisée (2) et la plaque de montage (1) comme indiqué.
2. Contrôler la distance entre la bande et le capteur à l’aide du gabarit d’espa‐
cement.
3. Protéger les vis à tête fraisées (2) avec un frein de vis.
4. Serrer les vis à tête fraisées. Couple de serrage : 1,41 ± 0,1 Nm.
Illustration 9: Montage tête de lecture TTK70S
Illustration 6: Tolérances de montage TTK50S
1. Monter la vis en titane (4), rondelle de sécurité (3), rondelle (2) et connec‐
teur femelle (1) comme indiqué.
2. Contrôler la distance entre la bande et le capteur à l’aide du gabarit d’espa‐
cement.
3. Protéger la vis avec un frein de vis.
4. Serrer la vis en titane. Couple de serrage : 2,5 ± 0,1 Nm.
5 Installation électrique
REMARQUE
Pour l’installation du système Feedback-moteur fiable, respecter la notice
d’instruction correspondante du système d’entraînement externe, voire de la
commande principale !
Illustration 7: Tolérances de montage TTK70S
AVERTISSEMENT
Dès que la bande de recouvrement a été fixée, l’imprimé de la bande n’est
plus visible. Il est recommandé de marquer la bande de recouvrement.
REMARQUE
Le sens de la flèche de l’imprimé sur le capteur doit correspondre au sens de
la flèche de l’imprimé de la bande.
La position du capteur par rapport à la bande magnétique est précisément
définie. Lors du montage, il faut veiller à ce qu’il y ait une lame d’air entre la
bande et le capteur sur toute la plage de mesure, indépendamment du fait que la
bande ou le capteur soit déplacé. Le gabarit d’espacement joint peut être utilisé
comme aide de montage.
Le montage de la tête de lecture TTK50S doit se faire uniquement avec le kit de
fixation (2109583). Le kit de fixation est composé d'une plaque de montage et de
deux vis à tête fraisée.
Le montage de la tête de lecture TTK70S doit se faire uniquement avec le kit de
fixation (2105618). Le kit de fixation comprend respectivement deux vis en
titane, rondelles de sécurité, connecteurs femelle et disques.
Illustration 8: Montage tête de lecture TTK50S
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 24
REMARQUE
Lors du montage, assurer un état hors tension sur les machines/installations
concernées !
5.1 Raccordement de blindage
REMARQUE
Le lieu d’utilisation doit être choisi de manière à ce que des perturbations
inductives et capacitives ne puissent pas agir sur le capteur ou son câble de
raccordement.
REMARQUE
Pour un fonctionnement sans perturbation, un raccordement de blindage du
codeur à la masse ou au blindage du moteur est nécessaire.
REMARQUE
Installer le câble avec décharge de traction. Si nécessaire prévoir chaîne
porte-câble ou flexible de protection.
5.2 Signaux du système Feedback-moteur fiable
Le système Feedback-moteur fiable dispose des signaux suivants :
Interface HIPERFACE® :
•
US tension d’alimentation ; la plage des tensions de service est comprise
entre +7 V et +12 V, la tension d´alimentation recommandée est de +8 V.
•
GND – connexion à la masse du codeur ; séparée galvaniquement du boîtier.
La tension relative est US.
•
+ SIN – canal des données de processus, signal sinus de 1 Vpp avec un
décalage statique de REFSIN.
•
REFSIN – canal des données de processus ; une tension statique de +2,5 V
qui sert de tension de référence pour + SIN.
•
+ COS – canal des données de processus ; + COS est un signal cosinus de
1 Vpp avec un décalage statique de REFCOS.
•
REFCOS – canal des données de processus ; une tension statique de +2,5 V
qui sert de tension de référence pour + COS.
•
Le canal de données paramètres ± – RS485 : signal de données négatif/
positif ; le canal de données paramètres est une interface asynchrone en
semi-duplex, qui correspond physiquement à la spécification EIA RS485.
Pour cela, des données peuvent être exigées par le Système Feedbackmoteur fiable via différentes commandes, et des données spécifiques à l
´utilisateur, telles p. ex. décalage de position, peuvent être mémorisées
dans l´EEPROM du Système Feedback-moteur fiable.
Page 25

5.3 Vue d’ensemble du raccordement
5.3.1 M12, 8 pôles
Fig. 6 : raccordement M12, 8 pôles
Affectation des broches du raccordement M12, 8 pôles
PIN Signal
1 REFSIN
2 + SIN
3 REFCOS
4 +COS
5 Données +
6 Données 7 GND
8 US
- Potentiel de boîtier, blindage via connecteur mâle du boitier.
5.3.2 sortie de câble
Affectation des câble départ de câble
Couleur du conducteur Signal
Marron REFSIN
Blanc + SIN
Noir REFCOS
Rose +COS
Gris Données +
Vert Données Bleu GND
Rouge US
Tresse en cuivre Blindage
6 Mise en service
La mise en service du système Feedback-moteur fiable présuppose que le fabri‐
cant du système d’entraînement relié a satisfait, lors du dimensionnement du
système d’entraînement, aux exigences de sécurité, décrites dans l’implémenta‐
tion « HIPERFACE DSL® Safety » - 8014120.
6.1 Contrôle
En fonctionnement, aucune autre mesure de contrôle n´est nécessaire.
AVERTISSEMENT
Le système Feedback-moteur fiable a une durée d’utilisation maximale (voir
Caractéristiques techniques) après laquelle il doit être mis hors service.
Il convient ici de prendre en compte la durée d’utilisation et la durée de vie
des paliers. La durée atteinte en premier en fonction de l’application déter‐
mine le moment de la mise hors service obligatoire.
L’année de construction du système Feedback-moteur fiable est indiquée sur
l’étiquette de l’appareil ou sur l’étiquette d’emballage dans le numéro de
série (SN) de façon codée (YYWW).
YY = désignent l’année (sans siècle).
WW = désignent la semaine de calendrier du dernier processus de fabrica‐
tion.
7 Entretien
Le système Feedback-moteur fiable ne nécessite pas de maintenance. En cas de
défaut, aucune possibilité de réparation n’est prévue. En cas de réclamations,
veuillez nous contacter.
La surface de la bande magnétique peut être nettoyée avec un chiffon doux lors
d’un fort encrassement.
8 Mise hors service
8.1 Respect de l’environnement
Le système Feedback-moteur fiable est construit de manière à ménager autant
que possible l’environnement. Il consomme un minimum d’énergie et de res‐
sources.
Toujours travailler dans le respect de l’environnement. Pour cela, observer
b
les informations suivantes à propos de la mise au rebut.
8.2 Mise au rebut
Éliminez toujours les appareils hors d’usage ou irréparables conformément aux
prescriptions d’élimination des déchets en vigueur dans le pays concerné.
REMARQUE
Nous vous offrons volontiers notre assistance lors de la mise au rebut de ces
appareils. N´hésitez pas à nous contacter.
9 Caractéristiques techniques
Caractéristiques techniques
TTK50S TTK70S
Performances
Pas de mesure
Longueur de période 1 mm
Longueur max. 1.000 mm max. 4.000 mm
Longueur de bande magnétique
Précision du système (température ambiante) ± 10 μm (+20 °C)
Répétabilité < 5 μm
Hystérésis de mesure < 10 μm
Interfaces
Type de code binaire
Signaux d´interface du canal des données de proc. analogique, différentiel
Canal de paramètre RS 485 numérique
Mémoire disponible dans EEPROM 2048 1.792 octets
Mécanique/Électronique
Dimensions Voir le plan coté
Poids tête de lecture 0,06 kg 0,08 kg
Poids bande magnétique 0,18 kg/m
Matériau tête de lecture Fonte de zinc
Bande magnétique 17410 ferrite dure 9/28 P
Vitesse de déplacement ≤ 10 m/s
Vitesse de déplacement jusqu´à laquelle la position
absolue peut être créée de manière fiable
Mode de raccordement Câble, 8 fils
Interface électrique HIPERFACE
Plage de tension d’alimentation 7 V CC à 12 V CC
Tension d´alimentation recommandée 8 V CC
Courant de service sans charge ≤ 55 mA
Tolérances de montage
Distance de lecture capteur/bande ≤ 0,3 mm
déviation latérale
Défaut d’alignement ± 1°
Caractéristiques ambiantes
Plage de température de fonctionnement - 30 °C ... +80 °C
Plage de température de stockage - 40 °C ... +85 °C, sans emballage
Humidité relative/condensation 100 % condensation autorisé
Résistance aux chocs 30 g, 6 ms (selon EN 60068-2-27)
Résistance aux vibrations
CEM EN 61000-6-2, EN 61000-6-3 2 2)
Indice de protection IP 65
Coefficient thermique de la bande magnétique (11 ± 1) μm/K/m
Intensité du champ ambiant maximale admissible
Intensité du champ maximale admissible < 150 kA/ m (< 190 mT)
Caractéristiques de sécurité
Niveau d'intégrité de la sécurité
Niveau de performance PL d (EN ISO 13849)
Catégorie 3 (EN ISO 13849)
Probabilité moyenne d’une défaillance dangereuse
par heure (PFHD)
5)
Duréee d’utilisation (TM)
0,244 μm lors de l’interpolation des
signaux sinus/cosinus avec par ex.
Longueur
+60 mm
12 bits
Longueur
+80 mm
1,3 m/s
Câble, 8 fils
Connecteur mâle
M12, 8 pôles
®
1)
+0,6 mm,
-0,6 mm
20 g, 10 Hz à 2.000 Hz (EN
60068-2-6)
2)
< 3 kA/m ... 4 kA/m (3,8 mT ... 5 mT) :
pour que les valeurs de précision
soient respectées
SIL2 (CEI 61508), SILCL2 (EN 62061)
4)
2,02 x 10
≤ 65 mA
+0,4 mm,
-0,2 mm
3)
-8
1)
20 ans (EN ISO 13849)
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 25
Page 26

TTK50S TTK70S
24
17
20
14
Ø 3,3
Ø 6
2
10
25
50
~ 12
6
14
(0.55)
5.5
(0.22)
10
(0.39)
5.3
(0.21)
10–0,1
(0.39)
0
M12 x 1
14
(0.55)
61.5 (2.42)
40 (1.57)
8
(0.31)
13
(0.51)
6.6 (0.26)
5.5 (0.22)
70 (2.76)
30 (1.18)
23.6 (0.93)
8
(0.31)
70 (2.76)
40 (1.57)
30 (1.18)
23.6
(0.93)
~ 18
(0.71)
50
(1.97)
2.5
(0.10)
21
(0.83)
14
(0.55)
5.3
(0.21)
5.5 (0.22)
10 (0.39)
Größe Lesekopf
5 0 50 mm
7 0 70 mm
Elektrische Schnittstelle
H HIPERFACE
®
X Linear
Anschlussart
A Stecker M12, 8-polig
J Leitung, 8-adrig, 0,5 m
I Leitung, 8-adrig, 1 m
Q Leitung, 8-adrig, 2 m
M Leitung, 8-adrig, 5 m
Speicherbereich
K 0 2 E²PROM 2048
T T K S - 0 - K 0 2
MTTFd : temps moyen avant défaillance dangereuse > 100 ans (EN ISO 13849)
Taux d’essai Pas nécessaire
Temps de requête max. Continuel (signaux analogiques)
Exactitude de mesure de sécurité
5)
± 0,25 mm (= ±¼ longueur des pôles)
Pas de mesure de sécurité 0,25 mm
1)
Pendant l´étalonnage, env. 100 mA.
2)
Si le Système Feedback-moteur fiable est monté dans un boîtier à conductibilité élec‐
trique, il est garanti selon les normes sur la CEM que le système de Feedback-moteur
fiable est relié à la mise à la terre centrale du régulateur de moteur via un blindage du
câble.
Le raccordement GND (0 V) de la tension d´alimentation y est également relié à la terre.
Avec les autres concepts de blindage, l’utilisateur doit exécuter ses propres tests.
2)
L’indice de protection (selon CEI 60529) est atteint avec contre-connecteur inséré.
3)
L´influence d´un champ parasite maximale admissible est atteinte lorsque la valeur de
position diffère de plus de 5 μm de la valeur initiale (sans influence d´un champ para‐
site). Cette valeur est atteinte lorsque une intensité de champ de 3 kA/ m à 4 kA/ m
(3,8 mT à 5 mT) apparaît en plus de l´intensité de champ de la bande magnétique sur l
´emplacement du capteur.
4)
Pour des informations détaillées sur le dimensionnement exact de votre machine / ins‐
tallation, veuillez contacter votre filiale SICK compétente.
5)
les valeurs indiquées se réfèrent à une couverture du diagnostic de 90 %, qui doit être
atteint par le système d’entraînement externe. En cas de résonance, il faut effectuer des
tests adaptés de l’ensemble du système d’entraînement.
9.1 Plans cotés
Illustration 12: Plan coté TTK70S avec départ de câble (dimensions en mm)
10 Informations de commande
Illustration 10: Plan coté TTK50S avec départ de câble (dimensions en mm)
Illustration 13: Clé de commande
11 Annexe
11.1 Étendue de la livraison
•
Système Feedback-moteur fiable
•
Consignes générales de sûreté
•
Notice d’instruction
Vous trouverez d´autres accessoires dans les informations produit sur
www.sick.com.
Illustration 11: Plan coté TTK70S avec connecteur mâle M12, (dimensions
en mm)
8023821/14W8/2019-07-10/de, en, es, it, fr TTK50S/TTK70S | SICK 26
11.2 Conformités
Les systèmes Feedback-moteur fiables TTK50 / TTK70S ont été fabriqués selon
les directives suivantes :
•
Directive machines 2006/42/CE
•
Directive Compatibilité électromagnétique 2014/30/UE
Vous trouverez la déclaration de conformité UE intégrale sur la page d’accueil
Internet de SICK sur internet :
www.sick.com
 Loading...
Loading...