

Page 1
action
0,8A/T
OPERATING INSTRUCTIONS
Scanning range in m (feet)
Scanning range in m (feet)
en
TiM55x / TiM56x /
TiM57x
Ranging Laser Scanner
Short Range
Correct use
The TiM55x/TiM56x laser scanner (referred to as the TiM
below) is intended for use as a non-contact measurement
sensor in standalone operation. It measures radial distances
within a at surface (circle segment) depending on reectivity.
The TiM displays the measured values of the recorded environment contour of its scanning angle of 270° over the Ether-
net or USB interface for further processing as either a one-off
or continuously on request. This requires a corresponding
driver to be created by the user.
The device is designed for portable or stationary use indoors
or outdoors in standalone operation, with a scanning range
of up to 10 m.
The purpose of this instruction manual is to allow you to put
the TiM into operation quickly and easily and to achieve the
rst measured value outputs and the rst detection results.
Further information on the mechanical and electrical instal-
lation as well as on the measured value output is available in
the & Technical Information (Nr. 8015883). This information
is available for download on the TiM product page (www.sick.
com/tim5xx).
The TiM is certied to IEC/EN/UL/CSA 61010-1:2007. These
operating instructions may contain passages of text in a
foreign language.
Safety information
• Read these instructions before commissioning the TiM
in order to familiarize yourself with the device and its
functions.
• The TiM corresponds to laser class 1 ( see “Laser radia-
tion! Page 3”).
• Mounting and electrical installation are to be performed
only by qualied technicians.
• Electrical connections between the TiM and other devices
may only be created or xed when there is no power to the
system. Otherwise, the devices may be damaged.
• Conducting cross sections of the supply cable from the
customer's power system should be designed in accordance with the applicable standards. Secure the TiM with
an external 0.8 A slow-blow fuse at the start of the supply
cable, from the perspective of the supply voltage.
• All circuits connected to the TiM must be designed SELV
or PELV circuits. (SELV = Safety Extra Low Voltage, PELV =
Protective Extra Low Voltage).
• Use the device only under permitted environmental
conditions (e.g. temperature, grounding potential, see
“Technical data Page 3”).
• Turn the swivel connector unit with the electrical connections max 180° from end position to end position.
• Protect the TiM against moisture and dust when the cover
to the USB socket is open. The black plastic cover must
be screwed ush in order to comply with enclosure rating
IP 67 in operation.
• Opening the screws of the TiM housing will invalidate any
warranty claims against SICK AG.
• The TiM does not constitute personal protection equip-
ment in accordance with the respective applicable safety
standards for machines.
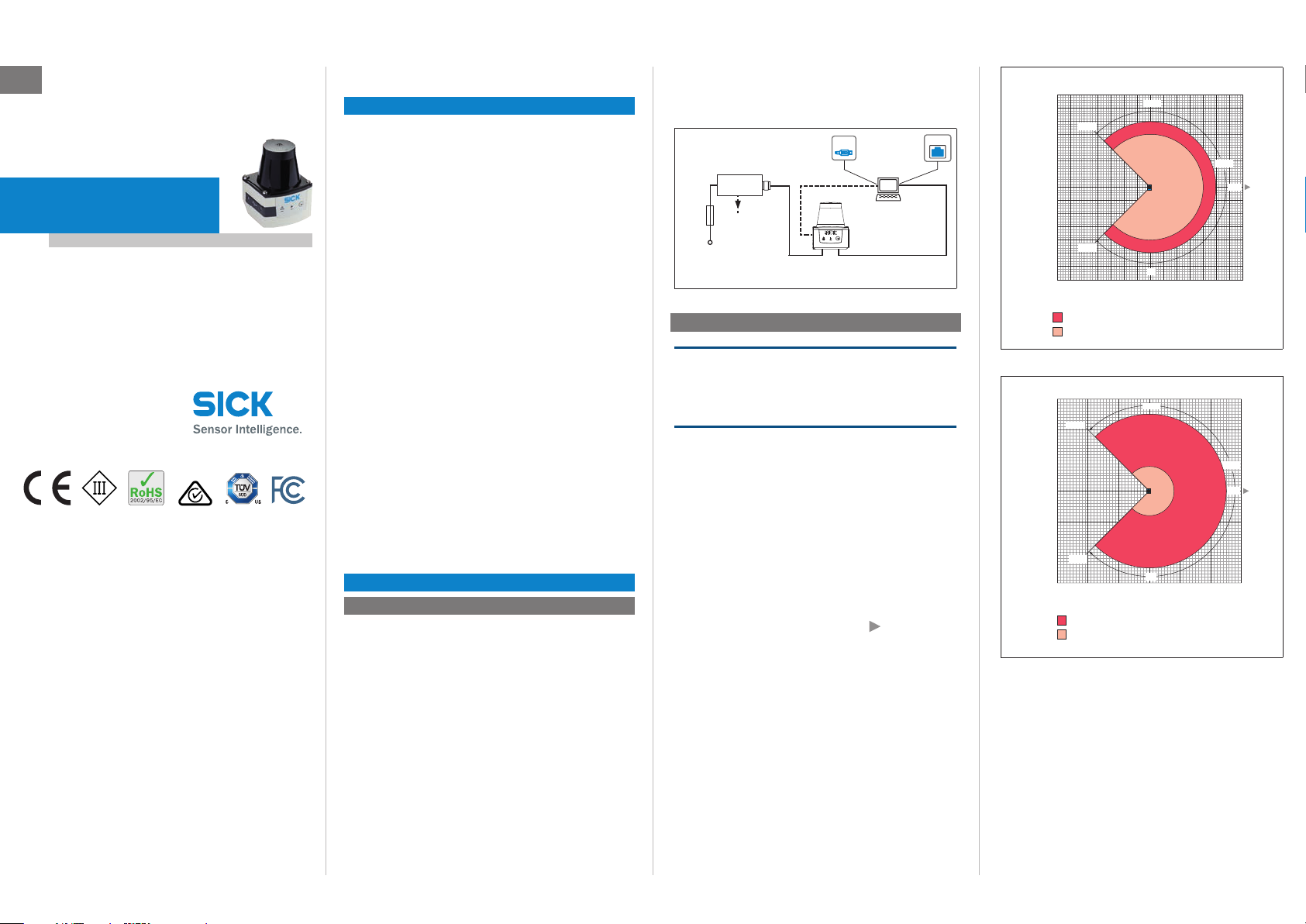
Commissioning and conguration
Step 1: Electrical installation
1. Connect the communication interface of the TiM to the
PC (Ethernet or USB; recommended Ethernet, 4-pin M12
outlet).
> If using a USB, connect the TiM's Micro USB port (behind
the black plastic cover on the side) to a free USB port (type
A) on the PC using a suitable shielded high-speed USB
cable (e.g. no. 6036106, 2 m).
The USB cable may not exceed 3 m in length!
When operating the USB interface, ESD/EMC interferences can lead to an interruption of the USB connection.
To continue with the data transfer, disconnect the USB
cable from the TiMand reattach it to establish contact. To
re-establish communication between TiM and PC in the
SOPAS communication software, select
o online .
G
2. Turn on and start the PC.
Provide power to the TiM (5-pin M12 plug).
Using the power supply unit it must be ensured that the
CommuniCation >
supply voltage does not drop below 8 V for longer than 2
ms and never rises above 30 V.
Following successful initialization, the green LED lights up
▸" (device ready for operation).
"
USBUSB
SOPASSOPAS
Configuration
TiM
Diagnosis
Driver for request of
measurement values
and further data
processing
„Ethernet“
Connection
SYNC/
Device Ready
DC 9 ... 28 V
box
„Power/Out“
delay-
fuse
Measurement mode: Electrical block diagram for commissioning
„USB 2.0“
EthernetEthernet
Step 2: Mounting and alignment
NOTE
During installation make sure there is no reective surface
behind the reference target see “Device overview Page
â.
3”, point
1. Optional: mount the TiM to separately ordered mounting
accessories (mounting kit 2), see "Mounting" Chapter in
the & Technical Information (Nr. 8015883).
2. Otherwise, mount the two straight plates from the
enclosed mounting kit 1 on the TiM using two M3 screws.
Use the two blind-hole threads either on the underside or
back of the housing ( see “Device overview Page 3”).
If the straight plates are not used, screw the screws provided by the customer max. 2.8 mm into the thread.
3. Mount the TiM on a prepared bracket.
The device should be as free from shock and vibration as
possible during operation (e.g. using vibration dampers).
4. Align the 90° axis of the TiM's scanning angle with the
center of the area to be monitored. The
lid of the optical hood serves as a bearing alignment aid
( see “Device overview Page 3”, point
marking on the
ã).
14
(45.93)
10
(32.81)
225°
6
(19.69)
2
(6.56)
0
2
(6.56)
6
(19.69)
‒45°
10
(32.81)
14
(45.93)
14
(45.93)10(32.81)
Range diagram for TiM55x/TiM56x
30
(98.43)
20
(65.62)
10
(32.81)
0
10
(32.81)
20
(65.62)
30
(98.43)
30
(98.43)
Range diagram for TiM57x
6
(19.69)
Scanning range max. 10 m (32.81 feet)
Scanning range typical 8 m (26.25 feet)
for objects up to 10 % remission
225°
‒45°
20
10
(65.62)
(32.81)
Scanning range max. 25 m (82.02 feet)
Scanning range typical 8 m (26.25 feet)
for objects up to 10 % remission
180°
0°
0
2
(6.56)2(6.56)
180°
0°
0
270°
90°
6
10
(19.69)14(45.93)
(32.81)
Scanning range in m (feet)
270°
90°
20
10
(32.81)
Scanning range in m (feet)
(65.62)
30
(98.43)
8015886/Z713/2016-10-10 • Subject to change without notice • SICK AG • Waldkirch • Germany • www.sick.com TIM55X/TIM56X/TIM57X | SICK 1
Page 2
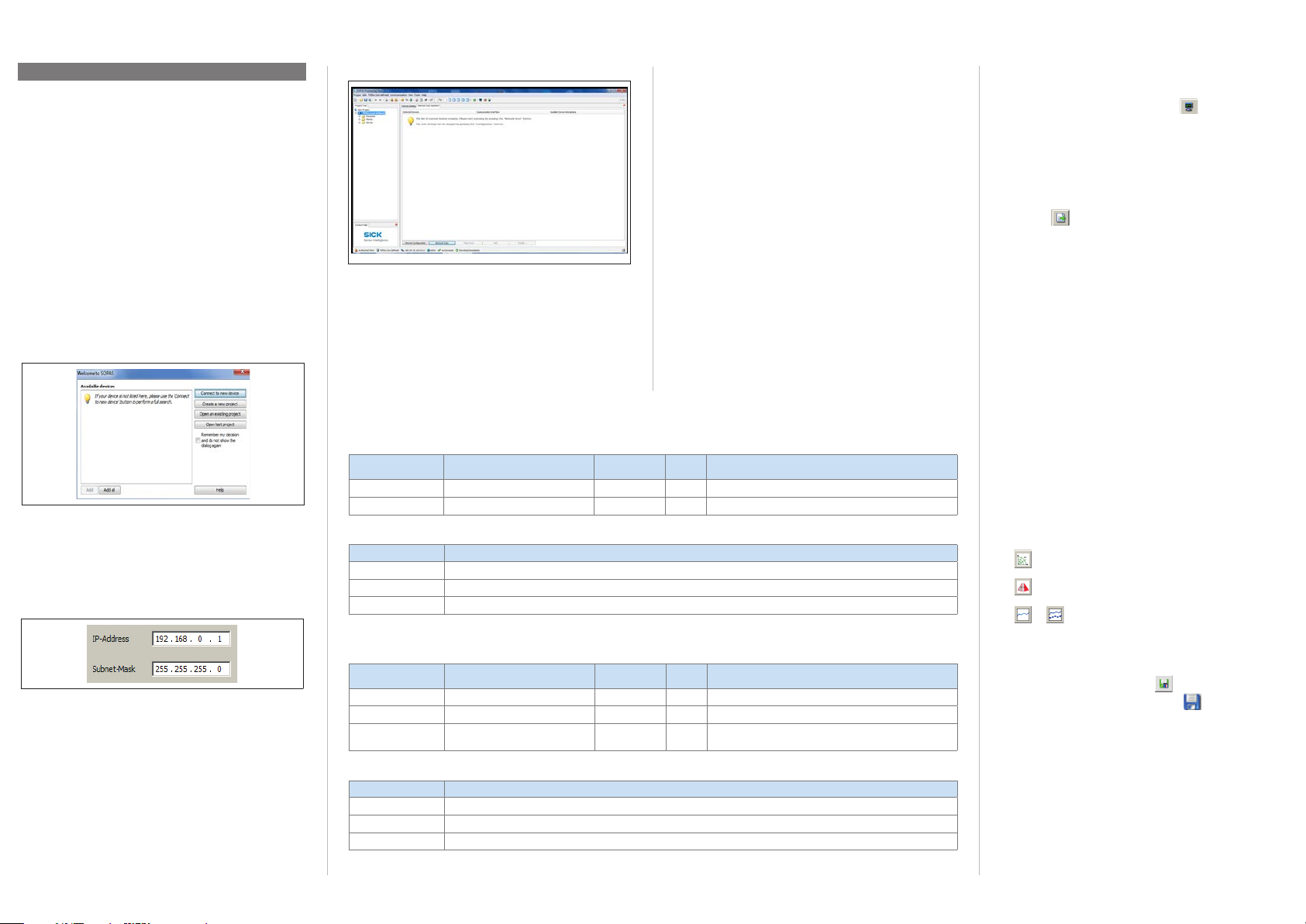
Step 3: Commissioning/Conguration
a. Installing and launching the SOPAS congura-
tion software
The SOPAS conguration software is used as standard to
display the surrounding contour (measuring line) recorded
by the TiM, as well as diagnostic information in the event of
an error.
1. Download and install on the PC the software from the
website “www.sick.com/SOPAS_ET“, software type SOPAS
ET. In this case, select the "Complete" option as selected
by the installation wizard. Administrator rights may be
required on the PC to install the software.
2. Start the "SOPAS" program option after completing the
installation.
Path: Start > Programs > SICK > SOPAS Engineering Tool
> SOPAS.
3. Establish communication between SOPAS and TiM via the
wizard that has started automatically: Select
new deviCe.
4. Follow the steps in the Connection Wizard until the Found
deviCes window.
5. Select the appropriate TiM from the list of available
devices:
• Use TiM on port 2111 to congure the device.
• Use TiM on port 2112 to view only measurement data.
Default IP address of the TiM:
6. Assign the required IP address/subnet mask to the TiM
automatiCally or manually. The IP address/subnet
via
mask should correspond to the address space of the later
application.
Finish to quit the Connection Wizard.
7. Click
SOPAS ET establishes communication with the TiM, loads
its current device description (parameters), and displays it
in the navigation tree.
ConneCt to a
SOPAS ET program window for TiM
b. Output of measured values
If the TiM receives one of the two following commands by telegram over the Ethernet or USB interface it will start the output
of measured values in real time over these data interfaces.
The detailed construction of the output telegram as well
as the ow of requests and outputs is described in the
"Measured value output“ in the & Technical Information
(Nr. 8015883).
Navigation tree (left) and respective device pages (right)
One-o output of measured values:
Telegram layout: sRN LMDscandata
Telegram part Description Variable type Length
Command type Request (SOPAS read by name)
Command Request data
string 3 sRN
string 11 LMDscandata
(byte)
Value range
Example:
Telegramm type Command
ASCII <STX>sRN{SPC}LMDscandata<ETX>
HEX 02 73 52 4E 20 4C 4D 44 73 63 61 6E 64 61 74 61 03
Binary 02 02 02 02 00 00 00 0F 73 52 4E 20 4C 4D 44 73 63 61 6E 64 61 74 61 05
Continuous output of measured values:
Telegram structure: sEN LMDscandata measurement start/stop
Telegram part Description Variable type Length
Command type Request (SOPAS event by name)
Command Request data
StartStop measurement
string 3 sEN
string 11 LMDscandata
Enum8 1 0 Stop measured value output
Value range
(byte)
1 Start measured value output
Example:
Telegramm type Command
ASCII <STX>sEN{SPC}LMDscandata{SPC}1<ETX>
HEX 02 73 45 4E 20 4C 4D 44 73 63 61 6E 64 61 74 61 20 31 03
Binary 02 02 02 02 00 00 00 11 73 45 4E 20 4C 4D 44 73 63 61 6E 64 61 74 61 20 01 33
Activate the output of the measured values in SOPAS on a
trial basis:
1. Start the terminal emulator with the
2. Select the
ConneCt... command in the ConneCtions menu
button.
in the dialog window and establish communication with
the TiM over the Ethernet or USB interface.
3. Enter one of the two telegrams in the "Send telegram"
input line as they appear (automatically framed by STX and
ETX when sending in the default setting). Pay attention to
blank characters in the string.
4. Use the
button to transfer the telegram to the TiM.
The TiM responds by providing the data as a one-off or
continuously in the display area of the terminal emulator.
Data output format of the measured values
The data output format per scan is comprised of the
measured values (radial distance, RSSI), device and status
information and time stamp.
In the default settings, the distance is output as a measured
value (in mm).
In order to output remission values in the telegram, select the
Rssi checkbox.
To display the remission values in the scan as well, select the
Rssi... checkbox.
Output range of the measured values
The TiM scans an angle range of 270°(-45° to 225°) and
outputs 271 measured values per scan in the default setting.
The angle range for which measured values can be output
can be set via
output RanGe (TiM55x: resolution 1°, TiM56x:
resolution 0.33°).
Some other useful functions
button: Display the elds in the polar coordinate
•
system
button: Change the view of the TiM from above (TiM:
•
black) to the view from below (TiM: blue)
or button: Switch off the display the full measur-
•
ing line or display a dotted measuring line.
Completing the conguration
> Permanently save the entire conguration:
Parameter set in: TiM click the
Conguration le on the PC: click the
button
button.
TIM55X/TIM56X/TIM57X | SICK 8015886/Z713/2016-10-10 • Subject to change without notice • SICK AG • Waldkirch • Germany • www.sick.com2
Page 3
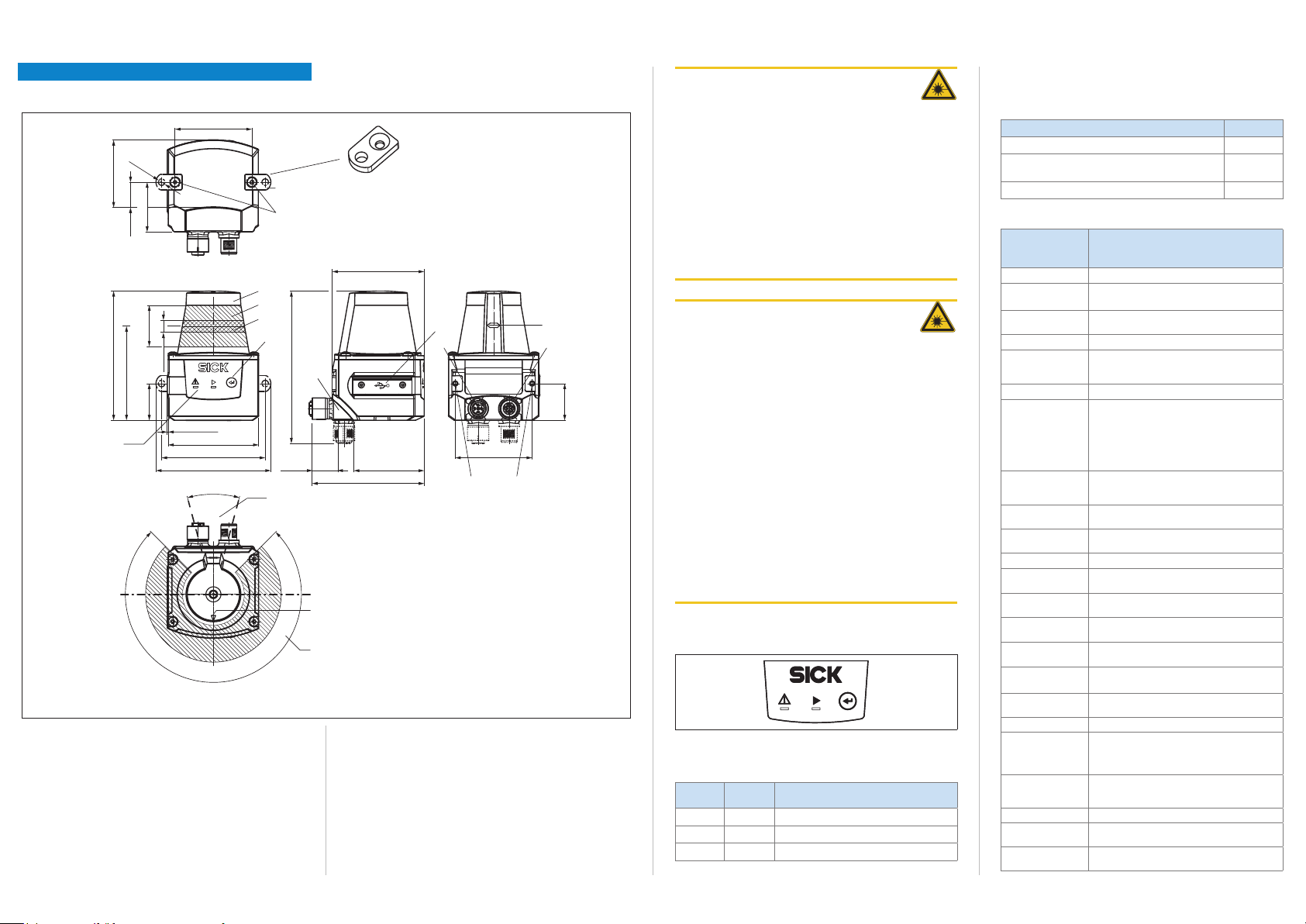
Description of the device
90°
51 (2.01)
Device overview
[Ø 4.3
(0.17)
]
44.79 (1.76)
33 (1.3)
(0.66)
16.79
3
4
27.3
(1.07)
8
(2.46)
85.75 (3.38)
(0.31)
62.46
[24.4
(0.96)]
0.7 (0.03)
7
60 (2.30)
[68.8 (2.71)]
[76.25
30°
1 2 x straight plates with M3 x 4 mm screw (included in delivery)
2 M3 threaded mounting hole, 2.8 mm deep (blind hole thread)
3 Optical hood
4 Receiving range (light inlet)
5 Transmission range (light emission)
6 Push-button (no function)
7 Red and green LED (status displays)
8 Swivel connector unit with electrical connections and á
9 Micro USB port, behind the black rubber plate
('Aux interface' connection for conguration with PC)
5
6
(3.00)]
â
1
2
17.37
(0.68)
225°‒45°
101.12 (3.98)
2 x
Mounting set 1
61
(2.40)
9
ß
8
46.71 (1.84)
74.39 (2.93)
180°0°
51 (2.01)
22
ã
ä
All dimensions in mm (inch)
ß Connection "Power/Synchronization output“ 5-pin, M12 outlet
à Marking for the position of the light emission level
á Ethernet connection, 4-pin M12 port
â Area in which no reective surfaces are allowed for mounted devices
ã Bearing marking to support alignment (90° axis)
ä 270° aperture angle (visual range)
à
á
24.4
(0.96)
a CAUTION
Laser radiation!
CLASS 1 LASER PRODUCT
The TiM corresponds to laser class 1 (eye-safe).
The laser beam is not visible to the human eye.
CAUTION – the use of controls, or adjustments or performance of procedures other than those specied herein may
result in hazardous radiation exposure.
> Do not open the housing (opening the housing will not
switch off the laser).
> Pay attention to the laser safety regulations as per
IEC 60825-1 (latest version).
a MISE EN GARDE
Rayonnement laser !
APPAREIL À LASER DE CLASSE 1
Le TiM est conforme à la classe laser 1 (sécurité des yeux).
Le rayon laser n’est pas visible pour l’oeil humain.
PRUDENCE – tout usage de commandes, réglages ou toute
application de procédures autres que ceux décrits dans ce
document peut entraîner une exposition dangereuse au
rayonnement.
Attention – L’utilisation des commandes ou réglages ou l’exécution des procédures autres que celles spéciées dans les
présentes exigences peuvent être la cause d’une exposition à
un rayonnement dangereux.
> Ne pas ouvrir le boîtier. (La diode laser n’est pas désac-
tivée en cas d’ouverture du boîtier)
> Se conformer aux dernières consignes de protection en
date contre le rayonnement laser IEC 60825-1 (dernière
version).
Additional information see “Technical data Page 3”.
Status indicators, functions
*
* Push-button with no function
Status displays
LED a
(red)
LED b
(green)
–
– –
O = illuminated; = ashing
Status
Device ready/monitoring mode
O
Error
–
Device without supply voltage
Function of the synchronization output (SYNC/De-
vice Ready)
The synchronization output works with the following levels:
Function Level
Device Ready High
Index signal (15 Hz), corresponds to measurement
at 90°
Error Low
Low peaks
Technical data
Model name TiM55x (Artikel-Nr. 1060445)
Scanning range
Angular resolution
Scanning frequency
Response time
Scanning range
Remission
Physical Minimum
object size
(cross-section)
Measurement
error (typically)
Band width (scan
eld atness)
Ambient light
immunity
Light source
Max. radiation
power
Max. pulse
duration
Device laser class
Output of measured values
Aux interface
Ethernet interface Max. data rate: 10 Mbit and 100 Mbit, cable
Switching inputs –
Switching outputs 1 x SYNC/Device Ready (I
Electrical connections
Optical indicators 2 x LED
Supply voltage DC 9 ... 28 V, SELV and PELV according to
Power consumption
TiM56x (Artikel-Nr. 1071419)
TiM57x (Artikel-Nr. 1075091)
Radial, aperture angle 270° in 1° steps
TiM55x: 1°
TiM56x/TiM57x: 0.33°
15 Hz (15 scans/s)
Typical 67 ms (2 scans)
0.05 m ... 10 m (TiM55x/TiM56x),
0.05 m ... 25 m (TiM57x);
typically 8 m at 10% remission
Typical 4% ... > 1,000 % (reector)
213 mm (TiM55x) / 121 mm
(TiM56x/TiM57x) for a scanning range of 8 m,
112 mm (TiM55x) / 66 mm (TiM56x/TiM57x)
for a scanning range of 4 m,
61 mm (TiM55x) / 38 mm (TiM56x/TiM57x)
for a scanning range of 2 m and 10%
remission
Statistical (1 s): 20 mm
3)
Systematic: ± 60 mm
Temperature drift 0.5 mm/K
± 3°
80,000 lx (indirect)
Laser diode, infrared (λ = 850 nm)
1.5 W (TIM55x)
1.0 W (TIM56x/57x)
5 ns
Laser class 1 according to EN 60825-1:
4)
2014
, eye-safe
Radial distance, reectivity value, device and
status information, time stamp
USB 2.0 for conguration and measure value
outputs (15 Hz), connecting cable max. 3 m.
length limited to max. 100 m
≤ 100 mA),
not electrically isolated from the supply
voltage. Short-circuit protected / temperature
protected
1 x 4-pin M12 plug (Ethernet)
1 x 5-pin M12 plug (power)
1 x Micro-USB port, type B (covered)
IEC 60364-4-41: 2005-12
4 W (with unloaded synchronization output)
a
1)
2)
8015886/Z713/2016-10-10 • Subject to change without notice • SICK AG • Waldkirch • Germany • www.sick.com TIM55X/TIM56X/TIM57X | SICK 3
Page 4
Model name TiM55x (Artikel-Nr. 1060445)
Connection “Power”
Y
“Ethernet” connection
Housing Lower part : Die-cast aluminum, optics hood:
Weight
Electrical safety
Protection class
Enclosure rating
EMC
Vibration resistance
Shock resistance
Ambient temperature
Air humidity
Temperature
change
Damp heat
Installation height
Ambient conditions
1) Technical data such as measurement errors and sensing range can only be
guaranteed up to a sensing range of 10 m.
2) T < -15 °C: typ. 7.5 m at 10% Remission
3) For temperatures >-10 °C; without reectors
4) Complies with 21 CFR 1040.10 and 1040.11 except for the deviations pursuant to Laser Notice No. 50 of June 2007
TiM56x (Artikel-Nr. 1071419)
TiM57x (Artikel-Nr. 1075091)
Polycarbonate with scratch-proof coating
Approx. 250 g
According to IEC 61010-1 (ed.3)
III according to EN 61140: 2006-08
IEC 61010-1 (ed.3)
IP 67 (EN 60529: 1991-10/A2: 2000-02).
No specied enclosure rating for opened
"Aux interface" connection and/or plugged in
USB cable!
Radiated emission: Residential area according
to EN 61000-6-3: 2007-01
Electromagnetic immunity: Industrial environment according to EN 61000-6-1: 2007-10
ANSI C63.4:2014
FCC 47 CFR Part 2: (June 2016)
FCC 47 CFR Part 15, Subpart B: (June 2016)
ICES-003 Issue 6: (January 2016)
According to EN 60068-2-6: 2008-02
According to EN 60068-2-27: 2009-05
Commissioning/switching on: –10 ... +50 °C
Operation: -25 ... +50 °C
Storage: -40 ... +75 °C
< 80%
According to EN 60068-2-14: 2009-07
According to EN 60068-2-30: 2005-12
< 5,000 m above sea level
According to EN 61010-1:2011-07, contamination level 3 outside housing
1)
For further technical specications, see the Online data sheet
on the product website (www.sick.com/tim5xx)
a WARNING
Risk of potential equalization currents
The TiM is designed to be operated in a system with pro-
fessional grounding of all connected devices and mounting
surfaces to the same ground potential. If this condition is not
met, potential equalization currents may through along the
cable shields, causing the following hazards:
• Dangerous contact voltage on the metal housing
• Malfunction or destruction of the TiM
• Heating of the cables with possible spontaneous combustion.
> See the "Electrical Installation" chapter in the & Technical
Information (Nr. 8015883) on the product website (www.
sick.com/tim5xx) for measures for eliminating hazards.
a ATTENTION
Risques liés à des courants d’équipotentialité
Le TiM a été conçu pour être utilisé dans une installation
prévoyant une mise à la terre correcte de tous les appareils
et surfaces de montage raccordés sur un même potentiel de
sol. Si cette condition n’est pas remplie, des courants d’équipotentialité risquent dans certaines conditions de passer par
les blindages des câbles et d’exposer aux risques suivants :
• tension de contact dangereuse sur le boitier en métal,
• comportement incorrect ou destruction du TiM.
• chauffe des câbles jusqu’à leur inammation spontanée.
> Pour des mesures de prévention de tels risques, voir le
chapitre « Installation électrique » de & l’Information tech-
nique (no. 8015883) ou sur la page produit sur internet
(www.sick.com/tim5xx).
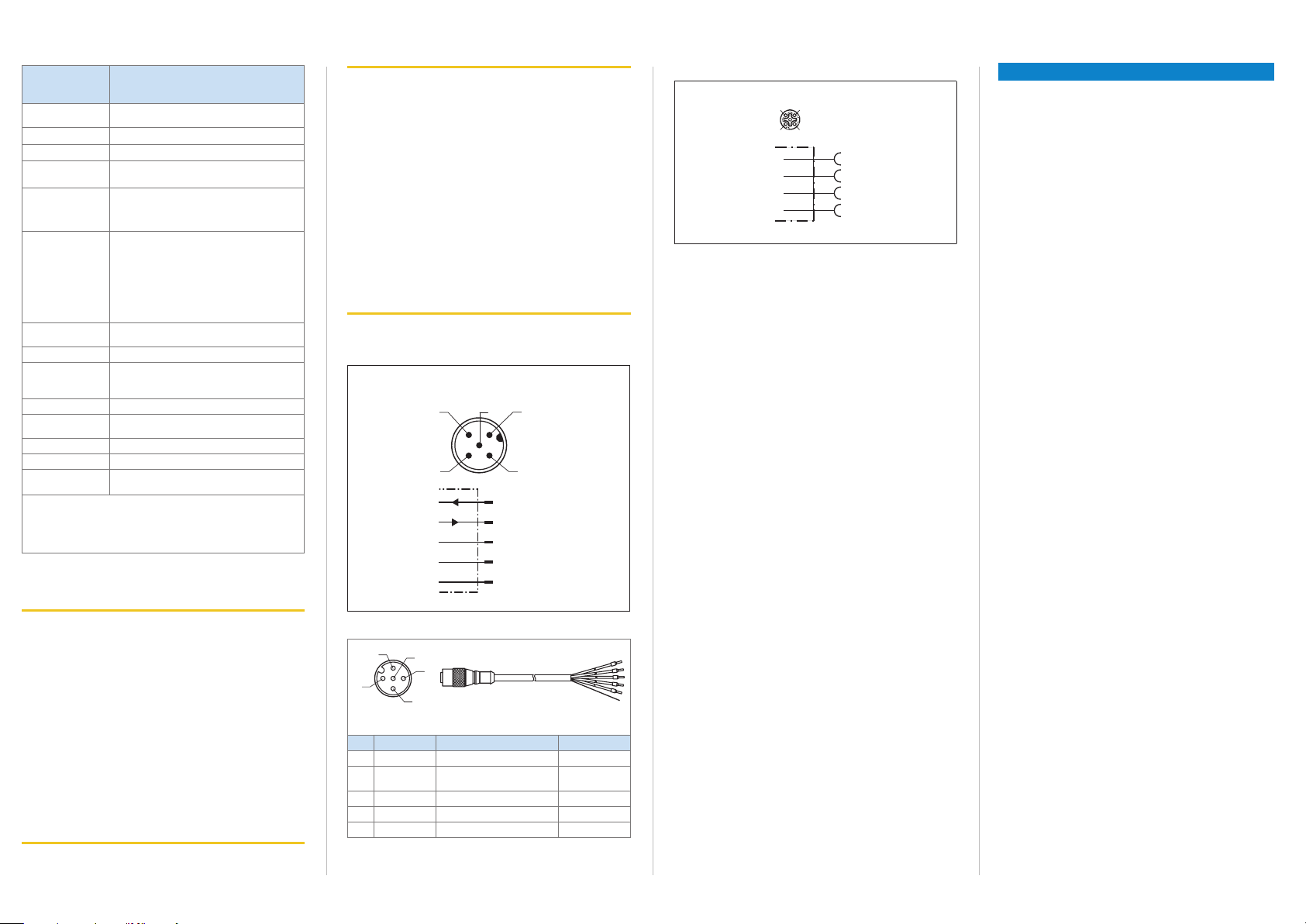
Pin assignment for swivel connector unit
POWER connection (supply voltage)
5-pin M12 plug
3
41
Cable no. 6036159 (5 m)
2
5
3
1
4
M12 - A / Socket
Pin Signal Function Wire color
1 24 V Supply voltage IN (9 ... 28 V) Brown
2 SYNC/Device
Ready
3 GND SYS Ground Blue or Yellow
4 Not assigned
5 Not assigned
Pin assignment of the 5-pin M12 POWER outlet (A-coded), straight, to
the cable and wire colors of the open cable end.
Synchronization output White
2
5
1
DC 9 … 28 V
2
SYNC/DEVICE READ
3
GND
4
n.c.
5
n.c.
Illustration may differ
Ethernet connection (6034415)
4
1
M12 socket,
D-encoded
32
1
TD+
2
RD+
3
TD–
4
RD–
Scope of delivery
• TiM including mounting kit 1 (two straight plates, 2
M3 x 4 mm screws)
• Printed operating instructions in German and English, in
other languages, as necessary.
• Other optional accessories (if these have been ordered)
Maintenance and care
The TiM does not contain any components that require maintenance. Maintenance is not necessary to ensure compliance
with laser class 1.
> If it is dirty, clean the infrared light permeable, black
optical hood for optimal measurement/detection perfor-
mance. Do this carefully using a damp cloth (with a mild
cleaning agent).
Transport and storage
The TiM must be transported and stored in its original pa-
ckaging with the USB protective cap plugged in. Do not store
outdoors. To ensure that any residual moisture present can
escape. Do not expose to aggressive media (e. g., solvents).
Storage conditions: dry, dust-free, no direct sunlight, as little
vibration as possible, storage temperature –40°C to +75°C,
relative air humidity max. 90% (non-condensing).
Repair
Repair work on TiM may only be performed by qualied and
authorized service personnel from SICK AG.
Removal and disposal
Any TiM which can no longer be used at the end of the
product life cycle must be disposed of in an environmentally
friendly manner in accordance with the respective applicable
country-specic waste disposal regulations.
The TiM is electronic waste and must under no circumstances
be disposed of with general waste!
Sources for obtaining additional information
Additional information about the TiM and its optional
accessories can be found in the following places:
Product web page for the TiM5xx
(www.sick.com/tim5xx)
• Technical Information (supplementary information on
mounting and electrical installation, an overview list,
and license texts for open-source software) in German
(no. 8018552) and English (no. 8015883).
• These operating instructions in German (no. 8015885),
English (no. 8015886), and in other languages if
required
• SOPAS conguration software with online help
• Ordering information in the detection and ranging
solutions product catalog
• Detailed technical specications (online data sheet)
• Dimensional drawing and 3D CAD dimension models in
various electronic formats
• EC declaration of conformity
• SOPAS conguration software updates
Support is also available from your sales partner:
www.sick.com/worldwide.
Copyright notices for open-source programs
SICK uses open source software in its TiM sensors.
This software is licensed by the rights holders using the
following licenses among others: the free licenses GNU
General Public License (GPL Version2, GPL Version3)
and GNU Lesser General Public License (LGPL), the MIT
license, zLib license, and the licenses derived from the
BSD license.
This Program is distributed in the hope that it will be
useful, but WITHOUT ANY WARRANTY; without even
the implied warranty for merchantability or tness for a
particular purpose.
See the GNU General Public License for more details. View
the complete license texts here:
www.sick.com/licensetexts
A printed copy of the license texts is also available on
request.
8015886/Z713/2016-10-10 ∙ 8M_DR/itl ∙ Printed in Germany (2016-10) ∙ All rights reserved ∙ Subject to change without notice
TIM55X/TIM56X/TIM57X | SICK 8015886/Z713/2016-10-10 • Subject to change without notice • SICK AG • Waldkirch • Germany • www.sick.com4
 Loading...
Loading...