

SGS Thomson Microelectronics ST10F269 Datasheet
ST10F269
16-BIT MCU WITH MAC UNIT, 256K BYTE FLASH MEMORY AND 12K BYTE RAM
PRELIMINARY DATA
■
HIGH PERFORMANCE 40MHz CPU WITH DSP
FUNCTION
– 16-BIT CPU WITH 4-STAGE PIPELINE
– 50ns INSTRUCTION CYCLE TIME AT 40MHz MAX
CPU CLO CK
– MULTIPLY/ACCUMULATE UNIT (MAC) 16 x 16-BIT
MULTIPLICATION, 40-BIT ACCUMULATOR
– REPEAT UNIT
– ENHANCED BOOLEAN BIT MANIPU LATION FA-
CILITIE S
– ADDITIONAL IN STRUCTIONS TO SUPPORT HLL
■
AND OPERATING SYSTEMS
– SINGLE-CYCLE CONTEXT SWITCHING SUP-
PORT
■
MEMORY ORGANIZATION
– 256K BYTE ON-CHIP FLASH MEMORY SINGLE
VOLTAG E WITH E RASE/ PROG RAM CONTR OL LER.
– 100K ERASING/PROGRAMMING CYCLES.
– UP TO 16M BYTE LINEA R ADDRE SS SPACE FO R
CODE AN D DATA (5M BYTES WI TH CAN)
– 2K BY TE ON-CHIP INTERNAL RAM (IRAM)
– 10K BYTE ON-CHIP EXTENSION RAM (XRAM)
■
FAST AND FLEXIBLE BUS
– PROG RAMMABLE EXTERNAL BUS CHARACTE-
RISTICS FOR DIFFERENT ADDRESS RANGES
– 8-BIT OR 16-BIT EXTERNAL DATA BUS
– MULTIPLEXED OR DEMULTIPLEXED EXTERNAL
ADDRESS/DATA BUSES
– FIVE PROGRAMMABLE CHIP-SELECT SIGNALS
– HOLD-ACK NOW LEDGE BUS AR BITRATION SUP-
PORT
■
INTERRUPT
TWO CAN 2.0B INTERFACES OPERATING ON ONE
OR TWO CAN BUSSES (30 OR 2x15 MESSAGE
OBJECTS)
■
FAIL-SAFE PROTECTION
– PROGRAMMABLE WATCHDOG TIMER
– OSCILLATOR WATCHDOG
■
ON-CHIP BOOTST RAP LOADER
■
CLOCK GENERATION
– ON-CHIP PLL
– DIRECT OR PRESCALED CLOCK INPUT
■
REAL TIME CLO CK
■
UP TO 111 GENERAL PURPOSE I/O LINES
– INDIVIDUALLY PROGRAMMABLE AS INPUT,
OUTPUT OR SPECIAL FUNCTION
– PROGRAMMABLE THRESHOLD (HYSTERESIS)
■
IDLE AND POWER DOWN MODES
■
SINGLE VOLTAGE SUPPLY: 5V ±10% (EMBEDDED
REGULATOR FOR 3.3 V CORE SUPPLY).
■
TEMPERATURE RANGE: -40 +125°C
■
144-PIN PQFP PACKAGE
– 8-CHANNEL PERIPHERAL EVENT CONTROLLER
FOR SINGLE CYCLE INTERRUPT DRIVEN DATA
TRANSFER
– 16-PRIORITY-LEVEL INTERRUPT SY STEM WITH
Flash Memory
56 SOURCES, SAMPLING RATE DOWN TO 25ns
■
TIMERS
– TWO MULTI-FUNCTIONAL GENERAL PURPOSE
TIMER UNITS WI TH 5 TIMERS
■
TWO 16- CHANNEL CAPTU RE / COMPARE UNITS
■
A/D CONVERTER
CAN1_RXD
CAN1_TXD
CAN2_RXD
CAN2_TXD
10K Byte
XRAM
– 16-CHANNEL 10-BIT
µ
s CONVERSION TIME AT 40MHz CPU CLOCK
– 4.85
■
4-CHANNEL PWM UNIT
■
SERIAL CHANNELS
– SYNC HRONOUS / ASYN CHRONOUS SERIAL
CHANNEL
– HIGH-SPEED SYNCHRONOUS CHANNEL
June 2002
This is advance information on a new product now in development or undergoing evaluation. Details are subject to change without notice.
PQFP144 (28 x 28 mm)
(Plastic Quad Flat Pack)
ORDE R CODE:
256K Byte
CAN1
CAN2
16
16
8
32
16
Port 0
Port 1Por t 4
Controller
10-Bit ADC
External Bus
Port 6 Port 5 Port 3
8
16 15
ST10F 269-Q3
CPU-Core and MAC Unit
Interrupt Controller
GPT1
ASC usart
BRG
GPT2
BRG
PEC
SSC
PWM
Port 7 Port 8
16
2K Byte
16
Internal
RAM
Watchdog
Oscillator
and PLL
XTAL1 XTAL2
16
Voltage
3.3V
Regulator
Port 2
CAPCOM2
CAPCOM1
16
8
8
1/160

ST10F269
TABLE OF CONTENTS PAGE
1 - INTRODUCTION .................. ................. ........................ ................ ........................ ..... 6
2 - PIN DATA ................................................................................................................... 7
3 - FUNCTIONAL DESCRIPTION ................ ................. ................ .......... ................ ........ 13
4 - MEMORY ORGANIZATION ....................................................................................... 14
5 - INTERNAL FLASH MEMORY .... .......... ................ ................. ......... ................. .......... 17
5.1 - OVERVIEW ................................................................................................................ 17
5.2 - OPERATIONAL OVERVIEW ...................................................................................... 17
5.3 - ARCHITECTURAL DESCRIPTION ............................................................................ 19
5.3.1 - Read Mode ................................................................................................................. 19
5.3.2 - Command Mode ......................................................................................................... 19
5.3.3 - Ready/Busy Signal ..................................................................................................... 19
5.3.4 - Flash Status Register ................................................................................................. 19
5.3.5 - Flash Protection Register ........................................................................................... 21
5.3.6 - Instructions Description .............................................................................................. 21
5.3.7 - Reset Processing and Initial State .............................................................................. 25
5.4 - FLASH MEMORY CONFIGURATION ........................................................................ 25
5.5 - APPLICATION EXAMPLES ....................................................................................... 25
5.5.1 - Handling of Flash Addresses . ..................................................................................... 25
5.5.2 - Basic Flash Access Control ........................................................................................ 26
5.5.3 - Programming Examples ............................................................................................. 27
5.6 - BOOTSTRAP LOADER ............................................................................................ 30
5.6.1 - Entering the Bootstrap Loader .................................................................................... 30
5.6.2 - Memory Configuration After Reset ............................................................................. 31
5.6.3 - Loading the Startup Code ........................................................................................... 32
5.6.4 - Exiting Bootstrap Loader Mode .................................................................................. 32
5.6.5 - Choosing the Baud Rate for the BSL ......................................................................... 33
6 - CENTRAL PROCESSING UNIT (CPU) ..................................................................... 34
6.1 - MULTIPLIER-ACCUMULATOR UNIT (MAC) ............................................................. 35
6.1.1 - Features ..................................................................................................................... 36
6.1.1.1 - Enhanced Addressing Capab ilit ies.............................................................................. 36
6.1.1.2 - Multiply-Accumulate Unit............................................................................................. 36
6.1.1.3 - Program Control........................... ................. ........................ ................ ...................... 36
6.2 - INSTRUCTION SET SUMMARY ................................................................................ 37
6.3 - MAC COPROCESSOR SPECIFIC INSTRUCTIONS ................................................. 38
7 - EXTERNAL BUS CONTROLLER ............................ ......... ................. ................ ........ 42
7.1 - PROGRAMMABLE CHIP SELECT TIMING CONTROL ............................................ 42
7.2 - READY PROGRAMMABLE POLARITY ..................................................................... 42
2/160

ST10F269
TABLE OF CONTENTS PAGE
8 - INTERRUPT SYSTEM ....................... ........................ ................. ....................... ........ 44
8.1 - EXTERNAL INTERRUPTS ......................................................................................... 44
8.2 - INTERRUPT REGISTERS AND VECTORS LOCATION LIST .................................. 45
8.3 - INTERRUPT CONTROL REGISTERS ....................................................................... 46
8.4 - EXCEPTION AND ERROR TRAPS LIST ................................................................... 47
9 - CAPTURE/COMPARE (CAPCOM) UNITS ................................................................ 48
10 - GENERAL PURPOSE TIMER UNIT .......................................................................... 51
10.1 - GPT1 .......................................................................................................................... 51
10.2 - GPT2 .......................................................................................................................... 52
11 - PWM MODULE ...... .......... ....................... ................. ....................... ................. .......... 54
12 - PARALLEL PORTS ...... ................. ................ ........................ ................. ................... 55
12.1 - INTRODUCTION ........................................................................................................ 55
12.2 - I/O’S SPECIAL FEATURES ....................................................................................... 57
12.2.1 - Open Drain Mode ....................................................................................................... 57
12.2.2 - Input Threshold Control ............................................................................................ 57
12.2.3 - Output Driver Control ................................................................................................58
12.2.4 - Alternate Port Functions ............................................................................................. 60
12.3 - PORT0 ........................................................................................................................ 61
12.3.1 - Alternate Functions of PORT0 .................................................................................... 62
12.4 - PORT1 ........................................................................................................................ 64
12.4.1 - Alternate Functions of PORT1 .................................................................................... 64
12.5 - PORT 2 ....................................................................................................................... 66
12.5.1 - Alternate Functions of Port 2 ...................................................................................... 66
12.6 - PORT 3 ....................................................................................................................... 69
12.6.1 - Alternate Functions of Port 3 ...................................................................................... 70
12.7 - PORT 4 ....................................................................................................................... 73
12.7.1 - Alternate Functions of Port 4 ...................................................................................... 74
12.8 - PORT 5 ....................................................................................................................... 77
12.8.1 - Alternate Functions of Port 5 ...................................................................................... 78
12.8.2 - Port 5 Schmitt Trigger Analog Inputs .......................................................................... 79
12.9 - PORT 6 ....................................................................................................................... 79
12.9.1 - Alternate Functions of Port 6 ...................................................................................... 80
12.10 - PORT 7 .......... ................ ................. ....................... ................. ........................ ............ 83
12.10.1 - Alternate Functions of Port 7 ...................................................................................... 84
12.11 - PORT 8 .......... ................ ................. ....................... ................. ........................ ............ 87
12.11.1 - Alternate Functions of Port 8 ...................................................................................... 88
3/160

ST10F269
TABLE OF CONTENTS PAGE
13 - A/D CONVERTER .......................... ....................... ................. ........................ ............ 90
14 - SERIAL CHANNELS ......................... ................. ........................ ................ ............... 91
14.1 - ASYNCHRONOUS / SYNCHRONOUS SERIAL INTERFACE (ASCO) .................... 91
14.1.1 - ASCO in Asynchronous Mode .................................................................................... 91
14.1.2 - ASCO in Synchronous Mode ...................................................................................... 93
14.2 - HIGH SPEED SYNCHRONOUS SERIAL CHANNEL (SSC) ......................... ......... ... 95
15 - CAN MODULES ............................. ................ ................. ........................ ................ ... 97
15.1 - CAN MODULES MEMORY MAPPING ...................................................................... 97
15.1.1 - CAN1 .......................................................................................................................... 97
15.1.2 - CAN2 .......................................................................................................................... 97
15.2 - CAN BUS CONFIGURATIONS .................................................................................. 97
16 - REAL TIME CLOCK .................................................................................................. 99
16.1 - RTC REGISTERS ...................................................................................................... 100
16.1.1 - RTCCON: RTC Control Register ................................................................................ 100
16.1.2 - RTCPH & RTCPL: RTC PRESCALER Registers ....................................................... 101
16.1.3 - RTCDH & RTCDL: RTC DIVIDER Counters .............................................................. 101
16.1.4 - RTCH & RTCL: RTC Programmable COUNTER Registers ....................................... 102
16.1.5 - RTCAH & RTCAL: RTC ALARM Registers ................................................................ 103
16.2 - PROGRAMMING THE RTC ....................................................................................... 103
17 - WATCHDOG TIMER ............ .......... ................ ........................ ................. ................ ... 105
18 - SYSTEM RESET ........................................................................................................ 107
18.1 - LONG HARDWARE RESET ...................................................................................... 107
18.1.1 - Asynchronous Reset .................................................................................................. 107
18.1.2 - Synchronous Reset (RSTIN pulse > 1040TCL and RPD pin at high level) ................ 108
18.1.3 - Exit of Long Hardware Reset ...................................................................................... 109
18.2 - SHORT HARDWARE RESET .................................................................................... 109
18.3 - SOFTWARE RESET .................................................................................................. 110
18.4 - WATCHDOG TIMER RESET ..................................................................................... 110
18.5 - RSTOUT, RSTIN, BIDIRECTIONAL RESET ............................................................ 111
18.5.1 - RSTOUT Pin ............................................................................................................... 111
18.5.2 - Bidirectional Reset ...................................................................................................... 111
18.5.3 - RSTIN pin ................................................................................................................... 111
18.6 - RESET CIRCUITRY ................................................................................................... 111
19 - POWER REDUCTION MODES ................................................................................. 114
19.1 - IDLE MODE ................................................................................................................114
19.2 - POWER DOWN MODE .............................................................................................. 114
19.2.1 - Protected Power Down Mode ..................................................................................... 114
19.2.2 - Interruptable Power Down Mode ................................................................................ 114
4/160

ST10F269
TABLE OF CONTENTS PAGE
20 - SPECIAL FUNCTION REGISTER OVERVIEW ......................................................... 117
20.1 - IDENTIFICATION REGISTERS ................................................................................. 123
20.2 - SYSTEM CONFIGURATION REGISTERS ................................................................ 124
21 - ELECTRICAL CHARACTERISTICS ......................... .......... ................ ................. ..... 131
21.1 - ABSOLUTE MAXIMUM RATINGS ............................................................................. 131
21.2 - PARAMETER INTERPRETATION ............................................................................. 131
21.3 - DC CHARACTERISTICS ........................................................................................... 131
21.3.1 - A/D Converter Characteristics .................................................................................... 134
21.3.2 - Conversion Timing Control ....................................................................................... 135
21.4 - AC CHARACTERISTICS ............................................................................................ 136
21.4.1 - Test Waveforms .......................................................................................................136
21.4.2 - Definition of Internal Timing ........................................................................................ 136
21.4.3 - Clock Generation Modes ............................................................................................ 137
21.4.4 - Prescaler Operation ....................................................................................................138
21.4.5 - Direct Drive ................................................................................................................. 138
21.4.6 - Oscillator Watchdog (OWD) ....................................................................................... 138
21.4.7 - Phase Locked Loop .................................................................................................... 1 38
21.4.8 - External Clock Drive XTAL1 ....................................................................................... 139
21.4.9 - Memory Cycle Variables ............................................................................................. 140
21.4.10 - Multiplexed Bus .......................................................................................................... 141
21.4.11 - Demultiplexed Bus ...................................................................................................... 147
21.4.12 - CLKOUT and READY ................................................................................................. 153
21.4.13 - External Bus Arbitration ..............................................................................................155
21.4.14 - High-Speed Synchronous Serial Interface (SSC) Timing ........................................... 157
21.4.14.1 Master Mode................................................................................................................ 157
21.4.14.2 Slave mode.................................................................................................................. 158
22 - PACKAGE MECHANICAL DATA ........... ......... ................. ......... ................. ............ 159
23 - ORDERING INFORMATION ...................................................................................... 159
5/160
ST10F269
1 - INTRODUCTION
The ST10F269 is a derivative of the
STMicroelectronics ST10 family of 16-bit
single-chip CMOS microcontrollers. It combines
high CPU performance (up to 20 million
instructions per second) with high peripheral
functionality and enhanced I/O-capabilities. It also
provides on-chip high-speed single voltage Flash
memory, on-chip high-speed RAM, and clock
generation via PLL.
ST10F269 is processed in 0.35µm CMOS
technology. The MCU core and the logic is
supplied with a 5V to 3.3V on chip voltage
regulator. The part is supplied with a single 5V
supply and I/Os work at 5V.
The device is upward compatible with the
ST10F168 device, with the following set of
differences:
– The Multiply/Accumulate unit is available as
standard. This MAC unit adds powerful DSP
functions to the ST10 architecture, but maintains
full compatibility for existing code.
– Flash control interface is now based on
STMicroelectronics third generation of
stand-alone Flash memories, with an embedded
Erase/Program Controller. This completely
frees up the CPU during programming or
erasing the Flash.
– Two dedicated pins (DC1 and DC2) on the
PQFP-144 package are used for decoupling the
internally generated 3.3V core logic supply.
Do
not connect these two pins to 5.0V exter nal
supply.
Instead, these pins should be
connected to a decoupling capacitor (ceramic
type, value ≥ 330 nF).
– The A/D Converter characteristics are different
from previous ST10 derivatives ones. Refer to
Section 21.3.1 - A/D Converter Characteristics.
– The AC and DC pa rameters are adapt ed to the
40MHz maximum CPU frequency. The
characterization is performed with C
= 50pF
L
max on output pins. Ref er to Section 21.3 DC
Characteristics.
– In order to reduce EMC, the rise/fall time and the
sink/source capability of the drivers of the I/O
pads are programmable. Refer to Section 12.2 I/
O’s Special Features.
– The Real Time Clock functionnality is added.
– The external interrupt sources can be selected
with the EXISEL register.
– The reset source is identified by a dedicated
status bit in the WDTCON register.
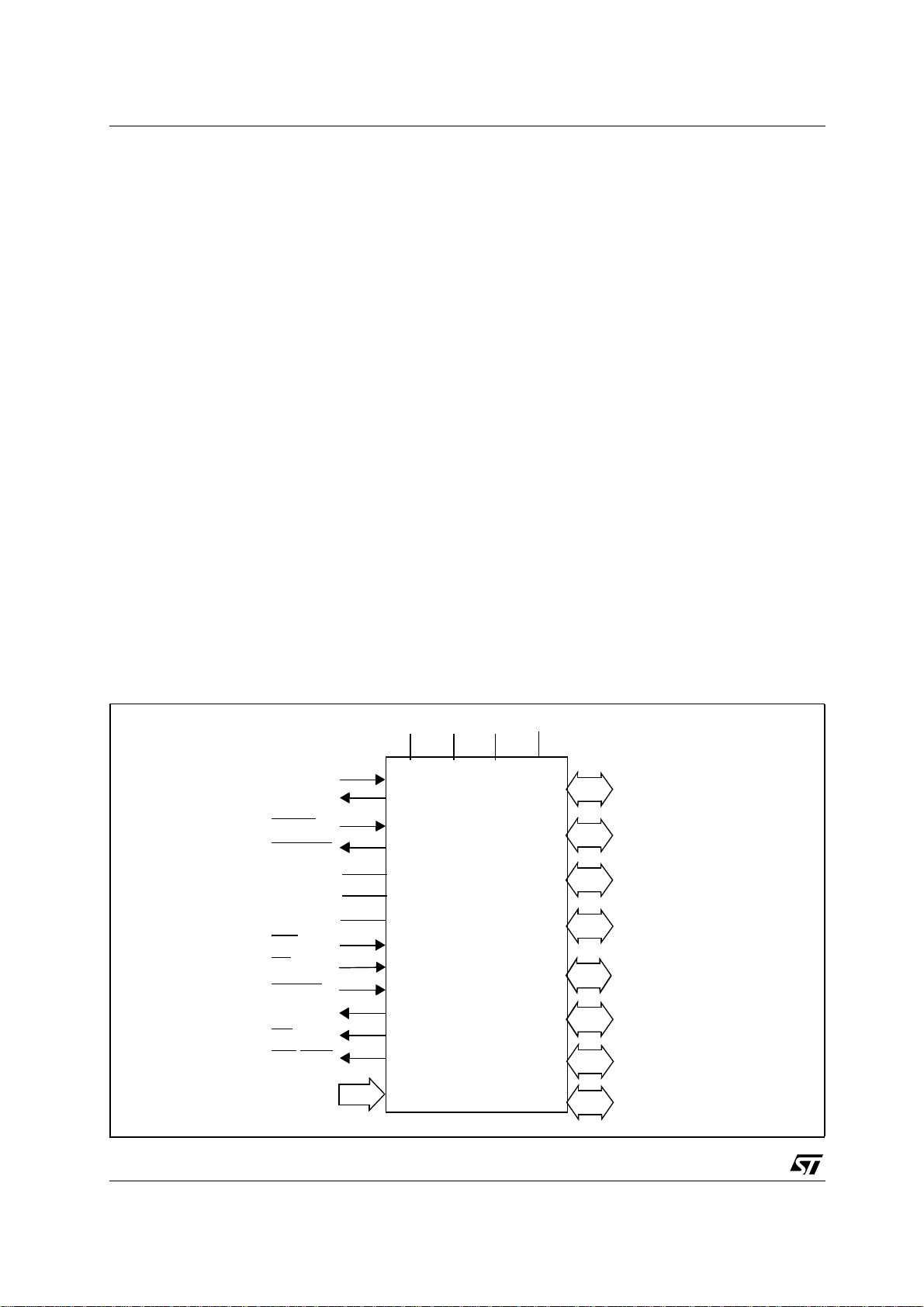
Figure 1 :
Logic Symbol
XTAL1
XTAL2
RSTIN
RSTOUT
RPD
V
AREF
V
AGND
NMI
EA
READY
ALE
RD
WR/WRL
Port 5
16-bit
V
DD
DC1 DC2
ST10F269
V
SS
Port 0
16-bit
Port 1
16-bit
Port 2
16-bit
Port 3
15-bit
Port 4
8-bit
Port 6
8-bit
Port 7
8-bit
Port 8
8-bit
6/160
2 - PIN DATA
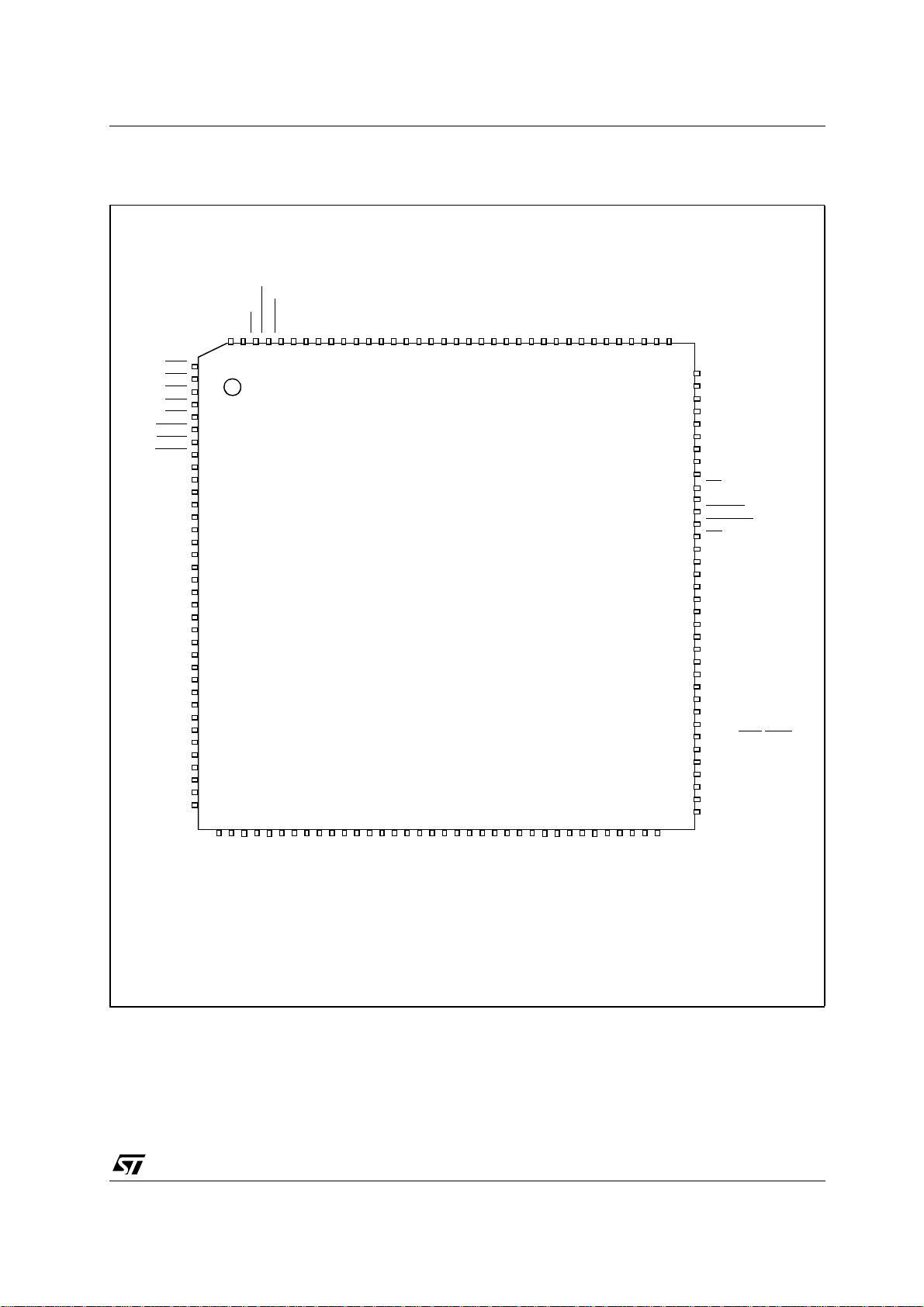
Figure 2 :
Pin Configuration (top view)
ST10F269
P6.0/CS0
P6.1/CS1
P6.2/CS2
P6.3/CS3
P6.4/CS4
P6.5/HOLD
P6.6/HLDA
P6.7/BREQ
P8.0/CC16IO
P8.1/CC17IO
P8.2/CC18IO
P8.3/CC19IO
P8.4/CC20IO
P8.5/CC21IO
P8.6/CC22IO
P8.7/CC23IO
DC2
V
P7.0/POUT0
P7.1/POUT1
P7.2/POUT2
P7.3/POUT3
P7.4/CC28I0
P7.5/CC29I0
P7.6/CC30I0
P7.7/CC31I0
P5.0/AN0
P5.1/AN1
P5.2/AN2
P5.3/AN3
P5.4/AN4
P5.5/AN5
P5.6/AN6
P5.7/AN7
P5.8/AN8
P5.9/AN9
VSSNMI
1
2
3
VDDRSTOUT
144
RSTIN
VSSXTAL1
XTAL2
VDDP1H.7/A15/CC27IO
P1H.6/A14/CC26IO
P1H.5/A13/CC25IO
P1H.4/A12/CC24IO
P1H.3/A11
P1H.2/A10
P1H.1/A9
P1H.0/A8
VSSVDDP1L.7/A7
P1L.6/A6
P1L.5/A5
P1L.4/A4
P1L.3/A3
P1L.2/A2
P1L.1/A1
P1L.0/A0
P0H.7/AD15
P0H.6/AD14
P0H.5/AD13
P0H.4/AD12
P0H.3/AD11
141
143
142
137
140
139
138
134
133
132
131
130
129
128
127
126
125
124
123
122
121
120
119
118
117
116
115
114
136
135
113
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
SS
19
20
21
22
ST10F269-Q3
23
24
25
26
27
28
29
30
31
32
33
34
35
36
3738394041424344454647484950515253545556575859606162636465666768697071
P0H.2/AD10
112
DD
P0H.1/AD9
VSSV
111
110
109
P0H.0/AD8
108
P0L.7/AD7
107
P0L.6/AD6
106
P0L.5/AD5
105
P0L.4/AD4
104
P0L.3/AD3
103
102
P0L.2AD2
101
P0L.A/AD1
100
P0L.0/AD0
EA
99
ALE
98
READY
97
96
WR/WRL
95
RD
94
V
SS
93
V
DD
92
P4.7A23/CAN2_TxD
91
P4.6A22/CAN1_TxD
90
P4.5A21/CAN1_RxD
89
P4.4A20/CAN2_RxD
88
P4.3/A19
87
P4.2/A18
86
P4.1/A17
85
P4.0/A16
RPD
84
V
83
SS
82
V
DD
81
P3.15/CLKOUT
80
P3.13/SCLK
72
79
78
77
76
75
74
73
P3.12/BHE
P3.11/RXD0
P3.10/TXD0
P3.9/MTSR
P3.8/MRST
P3.7/T2IN
P3.6/T3IN
/WRH
SS
DD
V
AREF
AGND
V
V
P5.12/AN12/T6IN
P5.13/AN13/T5IN
P5.10/AN10/T6EUD
P5.11/AN11/T5EUD
V
P2.0/CC0IO
P2.1/CC1IO
P2.2/CC2IO
P2.3/CC3IO
P2.4/CC4IO
P5.14/AN14/T4EUD
P5.15/AN15/T2EUD
SS
V
DC1
P2.5/CC5IO
P2.6/CC6IO
P2.7/CC7IO
P2.8/CC8IO/EX0IN
P2.9/CC9IO/EX1IN
P2.10/CC10IOEX2IN
P2.11/CC11IOEX3IN
P2.12/CC12IO/EX4IN
P3.0/T0IN
P3.2/CAPIN
P3.1/T6OUT
P2.13/CC13IO/EX5IN
P2.14/CC14IO/EX6IN
SS
DD
V
V
P3.5/T4IN
P3.3/T3OUT
P3.4/T3EUD
P2.15/CC15IO/EX7IN/T7IN
7/160
ST10F269
Table 1 :
P6.0 - P6.7 1 - 8 I/O 8-bit bidirec tional I/O por t, bit-wise programma ble for input or output via direction
P8.0 - P8.7 9 -16 I/ O 8-bit bidirectional I/O port, bit-w ise programmable for input or ou tput via direction
P7.0 - P7.7 19-26 I/O 8-bit bidirec tional I/O por t, bit-wise programma ble for input or output via direction
P5.0 - P5.9
P5.10 - P5.15
Pin Description
Symbol Pin Type Function
bit. Programmin g a n I/ O p in a s inp ut forces the corr espon ding out put dr iver to h igh
impedance state. Port 6 outputs can be configured as push-pull or open drain
drivers. The following Port 6 pins have alternate functions:
1 O P6.0 CS0
... ... ... ... ...
5 O P6.4 CS4
6 I P6.5 HOLD
7 O P6.6 HLDA
8 O P6.7 BREQ
bit. Programmin g a n I/ O p in a s inp ut forces the corr espon ding out put dr iver to h igh
impedance state. Port 8 outputs can be configured as push-pull or open drain
drivers. The input threshold of Port 8 is selectable (TTL or special).
The following Port 8 pins have alternate functions:
9 I/O P8.0 CC16IO CAPCOM2: CC16 Capture Input / Compare Output
... ... ... ... ...
16 I/O P8.7 CC23IO CAPCOM2: CC23 Capture Input / Compare Output
bit. Programmin g a n I/ O p in a s inp ut forces the corr espon ding out put dr iver to h igh
impedance state. Port 7 outputs can be configured as push-pull or open drain
drivers. The input threshold of Port 7 is selectable (TTL or special).
The following Port 7 pins have alternate functions:
19 O P7.0 POUT0 PWM Channel 0 Output
... ... ... ... ...
22 O P7.3 POUT3 PWM Channel 3 Output
23 I/O P7.4 CC28IO CAPCOM2: CC28 Capture Input / Compare Output
... ... ... ... ...
26 I/O P7.7 CC31IO CAPCOM2: CC31 Capture Input / Compare Output
27-36
39-44
39 I P5.10 T6EUD GPT2 Timer T6 External Up / Down Control Input
40 I P5.11 T5EUD GPT2 Timer T5 External Up / Down Control Input
41 I P5.12 T6IN GPT2 Timer T6 Count Input
42 I P5.13 T5IN GPT2 Timer T5 Count Input
43 I P5.14 T4EUD GPT1 Timer T4 External Up / Down Control Input
44 I P5.15 T2EUD GPT1 Timer T2 External Up / Down Control Input
II16-bit input-o nly port with Schmitt-Trigger characteristics. The pins of Port 5 ca n be
the analog inp ut c hann els ( up to 1 6) for the A/D co nverter, where P5.x equ als A Nx
(Analog input channel x), or they are timer inputs:
Chip Select 0 Output
Chip Select 4 Output
External Master Hold Request Input
Hold Acknowledge Output
Bus Request Output
8/160
Symbol Pin Type Function
ST10F269
P2.0 - P2.7
P2.8 - P2.15
P3.0 - P3.5
P3.6 - P3.13,
P3.15
47-54
57-64
47 I/O P2.0 CC0IO CAPCOM: CC0 Capture Input / Compare Output
... ... ... ... ...
54 I/O P2.7 CC7IO CAPCOM: CC7 Capture Input / Compare Output
57 I/O P2.8 CC8IO CAPCOM: CC8 Capture Input / Compare Output
... ... ... ... ...
64 I/O P2.15 CC15IO CAPCOM: CC15 Capture Input / Compare Output
65-70,
73-80,
81
65 I P3.0 T0IN CAPCOM Timer T0 Count Input
66 O P3.1 T6OUT GPT2 Timer T6 Toggle Latch Output
67 I P3.2 CAPIN GPT2 Register CAPREL Capture Input
68 O P3.3 T3OUT GPT1 Timer T3 Toggle Latch Output
69 I P3.4 T3EUD GPT1 Timer T3 External Up / Down Control Input
70 I P3.5 T4IN GPT1 Timer T4 Input for Count / Gate / Reload / Capture
73 I P3.6 T3IN GPT1 Timer T3 Count / Gate Input
74 I P3.7 T2IN GPT1 Timer T2 Input for Count / Gate / Reload / Capture
75 I/O P3.8 MRST SSC Master-Receiver / Slave-Transmitter I/O
76 I/O P3.9 MTSR SSC Master-Transmitter / Slave-Receiver O/I
77 O P3.10 TxD0 ASC0 Clock / Data Output (Asynchronous /
78 I/O P3.11 RxD0 ASC0 Data Input (Asynchronous) or I/O (Synchronous)
79 O P3.12 BHE
80 I/O P3.13 SCLK SSC Master Clock Output / Slave Clock Input
81 O P3.15 CLKOUT System Clock Output (=CPU Clock)
I/O 16-bit bidirectio nal I/O port, bit-wi se programmable for input or output via direction
bit. Programmin g a n I/ O p in a s inp ut forces the corr espon ding out put dr iver to h igh
impedance state. Port 2 outputs can be configured as push-pull or open drain
drivers. The input threshold of Port 2 is selectable (TTL or special).
The following Port 2 pins have alternate functions:
I EX0IN Fast External Interrupt 0 Input
I EX7IN Fast External Interrupt 7 Input
I T7IN CAPCOM2 Timer T7 Count Input
I/O
15-bit (P3.14 is missing) bidirectional I /O port, bit-wis e programmable for input or
I/O
output via direc tion bit. Programming an I/O pin as input forces the corre sponding
I/O
output driver to high impedance state. Port 3 outputs can be configured as push-pull
or open drain drivers. The input threshold of Port 3 is selectable (TTL or special).
The following Port 3 pins have alternate functions:
Synchronous)
External Memory High Byte Enable Signal
WRH
External Memory High Byte Write Strobe
9/160
ST10F269
Symbol Pin Type Function
P4.0 –P4.7 85-92 I/O Port 4 is an 8-bit bidirectional I/O port. It is bit-wise programmable for input or output
via direction bit. Pro gramming an I/O pin as inp ut forces the corresponding output
driver to high im pedance state. The input threshold is selectable (TTL or special).
Port 4.6 & 4.7 outputs can be configured as push-pull or open drain drivers.
In case of an extern al bus confi guration , Port 4 can be used to o utpu t the se gmen t
address lines:
85 O P4.0 A16 Segment Address Line
86 O P4.1 A17 Segment Address Line
87 O P4.2 A18 Segment Address Line
88 O P4.3 A19 Segment Address Line
89 O P4.4 A20 Segment Address Line
I CAN2_RxD CAN2 Receive Data Input
90 O P4.5 A21 Segment Address Line
I CAN1_RxD CAN1 Receive Data Input
91 O P4.6 A22 Segment Address Line
O CAN1_TxD CA N1 Transmit Data Output
92 O P4.7 A23 Most Significant Segment Address Line
O CAN2_TxD CA N2 Transmit Data Output
RD
/WRL 96 O Exte rnal M emor y Write Str obe. In WR- mode this pin is a ctivated for every external
WR
READY/
READY
ALE 98 O Address Latc h Enable Output. In case of use of external ad dressing or of multi-
EA
95 O External Memory Read Strobe. RD is activated for every external instruction or data
read access.
data write access. In WRL
accesses on a 16-bit bus, and for every data write access on an 8-bit bus. See
WRCFG in the SYSCON register for mode selection.
97 I Ready Input. The active level is programmable. When the Ready function is
enabled, the sele cted inact ive level at this pin, dur ing an exter nal me mory access,
will force the inser tio n of wait state c ycles until t he pin returns to the selected active
level.
plexed mode, this signal is the latch command of the address lines.
99 I Exter nal Access Ena ble pin. A low level applied to this pin du ring and after Reset
forces the ST10F2 69 t o st art the program fro m t he exter na l me mory space. A high
level forces the MCU to start in the internal memory space.
mode this pin is activated for low Byte data write
10/160
Symbol Pin Type Function
ST10F269
P0L.0 - P0L.7,
P0H.0
P0H.1 - P0H.7
100-107,
108,
111-117
I/O Two 8-bit bidirectional I/O po rts P0L and P0H, bit-wise programmable for input or
output via direc tion bit. Programming an I/O pin as input forces the corre sponding
output driver to high impedance state.
In case of an external bus configu ration, PORT0 ser ves as the address (A) and as
the address / data (AD) bus in multiplexed bus modes and as the data (D) bus in
demultiplexed bus modes.
Demultiplexed bus modes
Data Path Width: 8-bit 16-bit
P0L.0 – P0L.7: D0 – D7 D0 - D7
P0H.0 – P0H.7 I/O D8 - D15
Multiplexed bus modes
Data Path Width: 8-bit 16-bit
P0L.0 – P0L.7:
P0H.0 – P0H.7
P1L.0 - P1L.7
P1H.0 - P1H.7
XTAL1 138 I XTAL1 Oscillator amplifier and/or external clock input.
XTAL2 137 O XTAL2 Oscillator amplifier circuit output.
RSTIN
RSTOUT
NMI
V
AREF
V
AGND
RPD 84 - Timing pin for the retur n from interruptible powerdown mode and synchronous /
118-125
128-135
132 I P1H.4 CC24IO CAPCOM2: CC24 Capture Input
133 I P1H.5 CC25IO CAPCOM2: CC25 Capture Input
134 I P1H.6 CC26IO CAPCOM2: CC26 Capture Input
135 I P1H.7 CC27IO CAPCOM2: CC27 Capture Input
140 I Reset Input with Schmitt-T rigger characteristics. A low level at this pin for a specified
141 O Interna l Reset Indication Out put. This pin is driven to a low level during hardware,
142 I Non-Maskable Interrupt Input. A high to low transition at this pin causes the CPU to
37 - A/D converter reference voltage.
38 - A/D converter reference ground.
I/O Two 8-bit bidirectional I/O po rts P1L and P1H, bit-wise programmable for input or
output via direc tion bit. Programming an I/O pin as input forces the corre sponding
output driver to high impedance state. PORT1 is used as the 16-bit address bus (A)
in demultiplexed bus modes and also after switching from a demultiplex ed bus mode
to a multiplexed bus mode.
The following PORT1 pins have alternate functions:
To clock the device from an external source, drive XTAL1 while leaving XTAL2
unconnected. Minimum and maximum high / low and rise / fall times specified in the
AC Characteristics must be observed.
duration while the oscillator is r unning resets the ST10F2 69. An internal pull-up
resistor permits power-on reset using only a capacitor connected to V
tional reset mode (enabled by setting bit BDRSTEN in SYSCON register), the
RSTIN line is pulled low for the duration of the internal reset sequence.
software or watchdog timer res et.
tialization) instruction is executed.
vector to the NM I trap routin e. If bit PW DCFG = ‘ 0’ in SYS CON regis ter, when the
PWRDN ( power d own) i nstr uction is executed, the NMI
force the ST10F269 to go into power down mode. If NMI
when PWRDN is executed, the part will continue to run in normal mode.
If not used, pin NMI
asynchronous reset selection.
D0 – AD7AD0 - AD7
A
8 – A15
A
should be pulled high externally.
D8 - AD15
A
RSTOUT
remains low until the EINIT (end of ini-
SS
pin mu st b e low in or der to
is high and PWDCFG =’0’,
. In bidirec-
11/160
ST10F269
Symbol Pin Type Function
V
DD
V
SS
DC1
DC2
46, 72,
82,93,
109,
126,
136, 144
18,45,
55,71,
83,94,
110,
127,
139, 143
56
17
- Digital Supply Voltage:
= + 5V during normal operation and idle mode.
- Digital Ground.
--3.3V Decoupling pin: a decoupling capacitor of ≥ 330 nF must be connected
between this pin and nearest V
SS
pin.
12/160
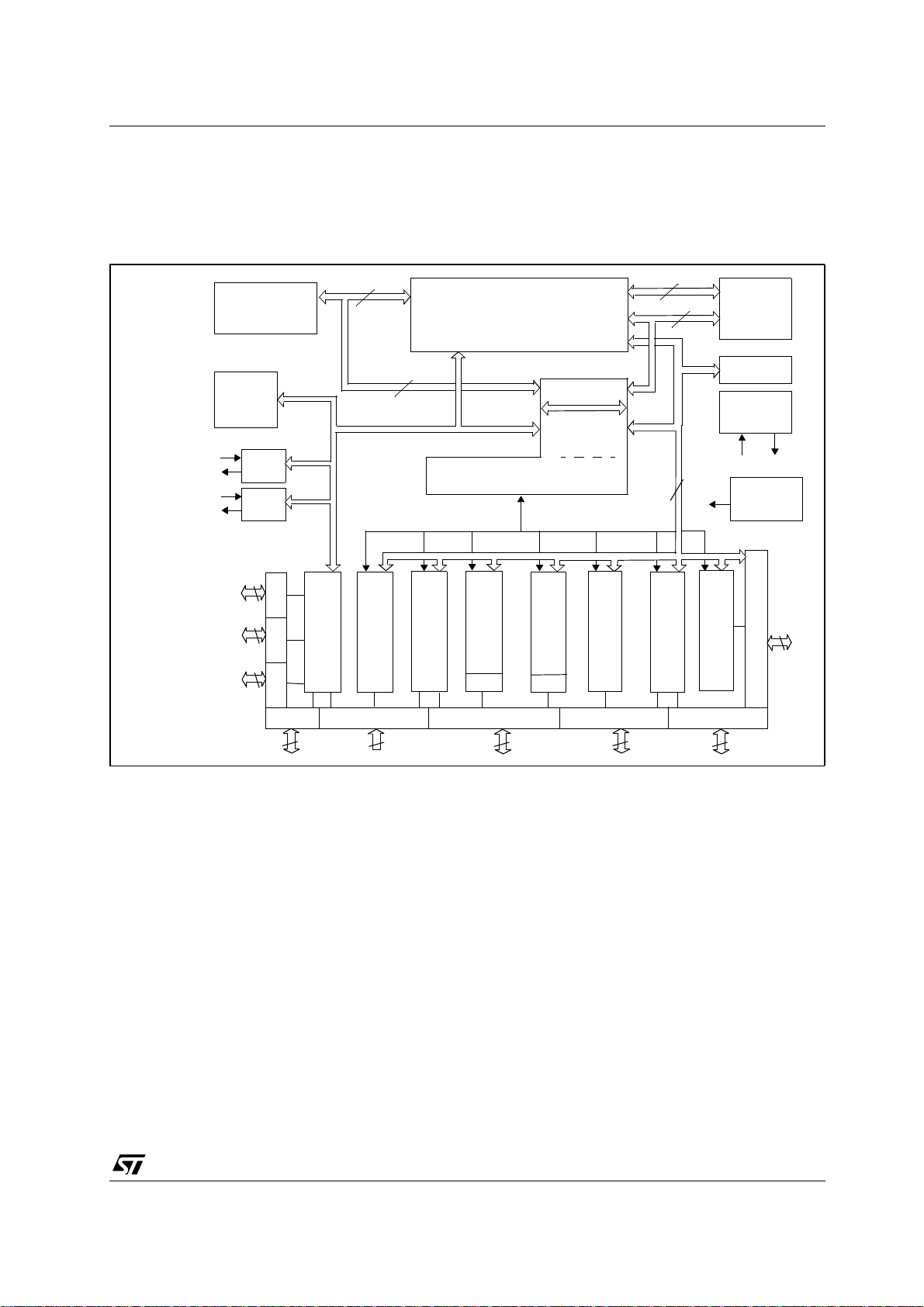
3 - FUNCTIONAL DESCRIPTION
The architecture of the ST10F269 combines
advantages of both RISC and CISC processors
and an advanced peripheral subsystem. The
Figure 3 :
Block Diagram
ST10F269
block diagram g ives an overview of the different
on-chip components and the high bandwidth
internal bus structure of the ST10F269.
P4.5 C AN1_RXD
P4.6 CAN1_TXD
P4.4 C AN2_RXD
P4.7 CAN2_TXD
256K Byte
Flash Memory
10K Byte
XRAM
CAN1
CAN2
16
Port 0
16
Port 1Port 4
8
Port 6
32 16
CPU-Core and MAC Unit
16
PEC
Interrupt Controller
GPT1
ASC usar t
Controller
External Bus
8
10-Bit ADC
GPT2
Port 5
16 15
BRG
Port 3
SSC
BRG
PWM
Port 7
16
16
CAPCOM2
8
2K Byte
Inter n al
RAM
Watchdog
Oscillator
and PLL
XTAL1 XTAL2
3.3V Voltage
Regulator
Port 2
CAPCOM1
Port 8
16
8
13/160

ST10F269
4 - MEMOR Y ORGA NI ZA T IO N
The memory space of the ST10F269 is configured
in a unified m emory architecture. Code memor y,
data memory, registers and I/O ports are
organized within the same linear address space of
16M Bytes. The entire memory space can be
accessed Byte wise or Word wise. Particular
portion s of the on-chip memory have additionally
been made directly bit addressable.
Flash:
IRAM:
(dual-port) is provided as a storage for data,
system stack, g e ner a l purpose register banks and
code. A register bank is 16 Wordwide (R0 to R15)
and / or Bytewide (RL0, RH0, …, RL7, RH7)
general purpose registers.
XRAM:
(single port XRAM) is provided as a storage for
data, user stack and code.
The XRAM is divided into 2 areas, the first 2K
Bytes named XRAM1 and the second 8K Bytes
named XRAM2, conn ected to the internal XBUS
and are accessed like an external memory in
16-bit demultiplexed bus-mode without wait state
or read/write delay (50ns access at 40MHz CPU
clock). Byte and Word accesses are allowed.
The XRAM1 address range is 00’E000h
- 00’E7FFh if XPEN (bit 2 of SYSCON register),
and XRAM1EN (bit 2 of XPERCON register) are
set. If XRAM1EN or XPEN is cleared, then any
access in the address range 00’E000h - 00’E7FFh
will be directed to external memory interface,
using the BUSCONx register corresponding to
address matching ADDRSELx register
The XRAM2 address range is 00’C000h
- 00’DFFFh if XPEN (bit 2 of SYSCON register),
and XRAM2 (bit 3 of XPERCON register are set).
If bit XRAM2EN or XPEN is cleared, then any
access in the address range 00’C000h
- 00’DFFFh will be directed to external memory
interface, using the BUSCONx register
corresponding to address matching ADDRSELx
register.
As the XRAM appears like external memory, it
cannot be used as system stack or as register
banks. The XRAM is not provided for single bit
storage and therefore is not bit addressable.
256K Bytes of on-chip Flash memory.
2K Bytes of on-chip internal RAM
10K Bytes of on-chip extension RAM
SFR/ESFR
: 1024 Bytes (2 x 512 Bytes) of
addr ess sp ace is r eserved for the spec ial fun ctio n
register areas. SFRs are Wordwide registers
which are used to control and to monitor the
function of the different on-chip units.
CAN1:
Address range 00’EF00h - 00’EFFFh is
reserved for the CAN1 Module access. The CAN1
is enabled by setting XPEN bit 2 of the SYSCON
register and by setting CAN1EN bit 0 of the new
XPERCON register. Accesses to the CAN Module
use demultiplexed addresses and a 16-bit data
bus (Byte accesses are possible). Two wait states
give an access time of 100ns at 40MHz CPU
clock. No tri-state wait states are used.
CAN2:
Address range 00’EE00h - 00’EEFFh is
reserved for the CAN2 Module access. The CAN2
is enabled by setting XPEN bit 2 of the SYSCON
register and by setting CAN2EN bit 1 of the new
XPERCON register. Accesses to the CAN Module
use demultiplexed addresses and a 16-bit data
bus (Byte accesses are possible). Two wait states
give an access time of 100ns at 40MHz CPU
clock. No tri-state wait states are used.
In order to meet the needs of designs where more
memory is required than is provided on chip, up to
16M Bytes of external RAM and/or ROM can be
connected to the microcontroller.
Note If one or the two CAN modules are used,
Port 4 cannot be programmed to output all
8 segment address lines. Thus, only 4
segment address lines can be used,
reducing the external memory space to 5M
Bytes (1M Byte per CS
line).
Visi bi lity of X B US Periphe rals
In order to keep the ST10F269 compatible with
the ST10C167 and with the ST10F167, the XBUS
peripherals can be sel ected to be visible and / or
accessible on the external address / data bus.
CAN1EN and CAN2EN bits of XPERCON register
must be set. If these bits are cleared before the
global enabling with XPEN-bit in SYSCON
register, the corresponding address space, port
pins and interrupts are not occupied by the
peripheral, thus the peripheral is not visible and
not available. Refer to Chapter 20 - Special
Function Register Overview.
14/160
ST10F269
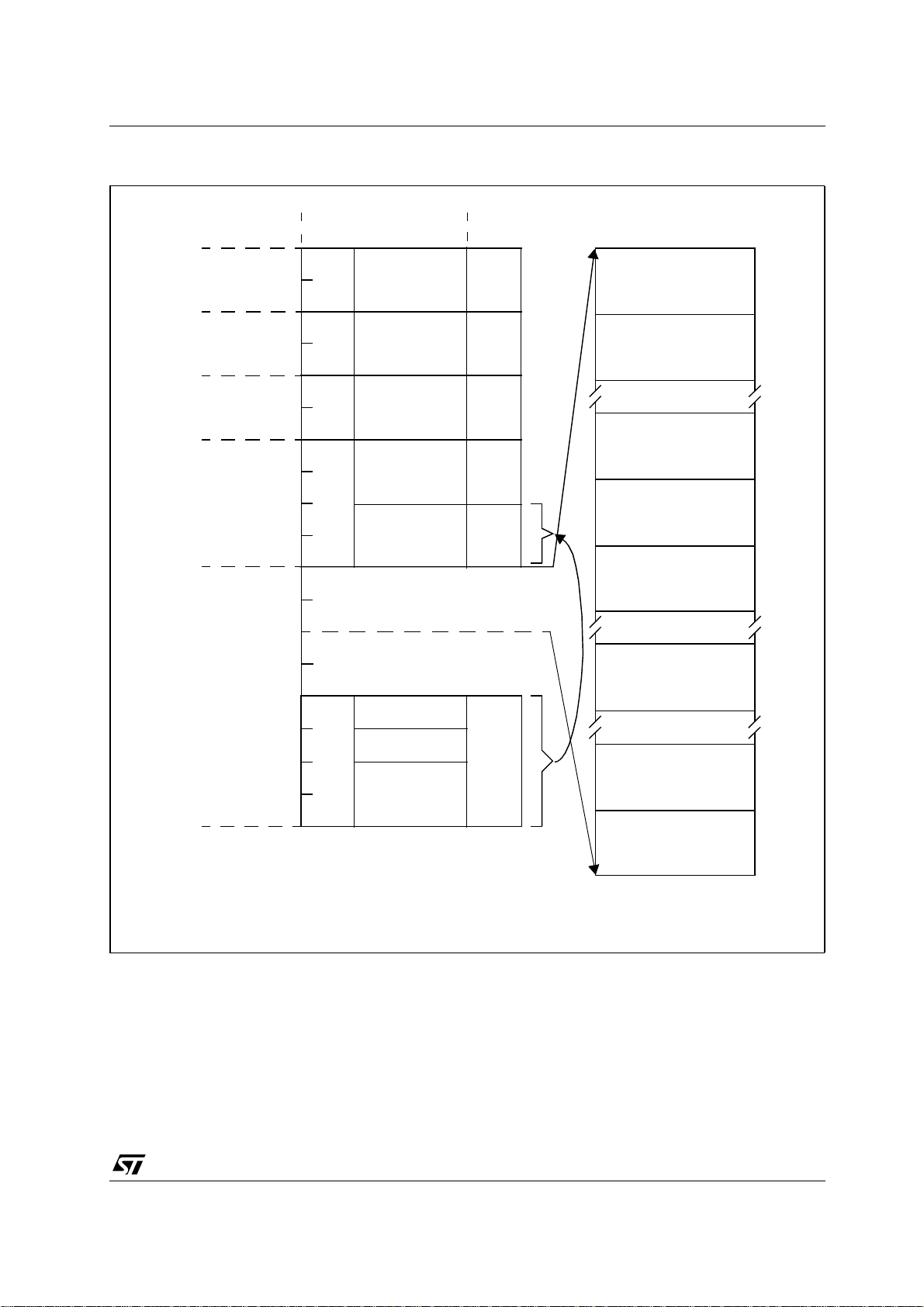
Figure 4 :
ST10F269 On-chip Memo ry Mapping
14
05’0000
Block6 = 64K Bytes
04’0000
10
Segment 4Segment 3Segment 2Segment 1Segment 0
Block5 = 64K Bytes
0C
03’0000
Block4 = 64K Bytes
02’0000
08
07
06
05
04
03
01’8000
01’0000
00’C000
Block3 = 32K Bytes
Block2*
Block1*
Block0*
Bank 1H
Bank 1L
RAM, SFR and X-pheripherals are
mapped i nt o the addres s sp ace.
00’FFFF
SFR : 512 B yt es
00’FE00
00’FDFF
IRAM : 2K Bytes
00’F600
00’F1FF
ESFR : 51 2 By tes
00’F000
00’EFFF
CAN1 : 256 Bytes
00’EF00
00’EEFF
CAN2 : 256 Bytes
00’EE00
02
00’6000
01
00’4000
00
00’0000
Data
Page
Number
* Bank 0L ma y be remapped fr om segment 0 to s egm ent 1 (Bank 1L) by setting SY SC ON-ROMS1 (before EINIT)
Data Page Num ber and Absol ute Memory A ddress are hexadecimal va l ues.
Absolu te
Memory
Address
Block2 = 8K Bytes
Block1 = 8K Bytes
Bank OL
Block0 = 16K Bytes
Internal
Flash
Memory
00’EC14
Real Time Clock
00’EC00
00’E7FF
XRAM1 : 2K Bytes
00’E000
00’DFFF
XRAM2 : 8K Bytes
00’C000
15/160
ST10F269
XPERCON (F024h / 12h)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
--------
-
CAN1EN
CAN2EN
XRAM1EN
XRAM2EN
RTCEN
CAN1 Enable Bit
‘0’: Accesses to the on-chip CAN1 XPeripheral and its functions are disabled. P4.5 and P4.6 pins can be
used as general purpose I/Os. Address range 00’EF00h-00’EFFFh is only directed to external memory if
CAN2EN is also ‘0’.
‘1’: The on-chip CAN1 XPeripheral is enabled and can be accessed.
CAN2 Enable Bit
‘0’: Accesses to the on-chip CAN2 XPeripheral and its functions are disabled. P4.4 and P4.7 pins can be
used as general purpose I/Os. Address range 00’EE00h-00’EEFFh is only directed to external memory if
CAN1EN is also ‘0’.
‘1’: The on-chip CAN2 XPeripheral is enabled and can be accessed.
XRAM1 Enable Bit
‘0’: Accesses to external memory within space 00’E000h to 00’E7FFh. The 2K Bytes of internal XRAM1
are disabled.
’1’: Accesses to the internal 2K Bytes of XRAM1.
XRAM2 Enable Bit
‘0’: Accesses to the external memory within space 00’C000h to 00’DFFFh. The 8K Bytes of internal
XRAM2 are disabled.
’1’: Accesses to the internal 8K Bytes of XRAM2.
RTC Enable Bit
’0’: Accesses to the on-chip Real Time Clock are disabled, external access is performed. Address range
00’EC00h-00’ECFFh is only directed to external memory if CAN1EN and CAN2EN are ’0’ also
’1’: The on-chip Real Time Clock is enabled and can be accessed.
ESFR Reset Value: - - 05h
--
RTCEN
RW RW RW RW RW
XRAM2EN XRAM1EN CAN2EN CAN1EN
Note: - When both CAN are disabled via XPER-
CON setting, then any access in the
address range 00’EE00h - 00’EFFFh will
be directed to external memor y interface,
using the BUSCONx reg ister corresponding to address matching ADDRSELx register. P4.4 and P4.7 can be used as General
Purpose I/O when CAN2 is disabled, and
P4.5 and P4.6 can be used as General
Purpose I/O when CAN1 is disabled.
- The default XPER selection after Reset is
identical to XBUS configuration of
ST10C167: XCAN1 is enabled, XCAN2 is
disabled, XRAM1 (2K Byte compatible
XRAM) is enabled, XRAM 2 (new 8K Byte
XRAM) is disab led.
16/160
- Register XPERCON cannot b e changed
after the global enabling of XPeripherals,
i.e. after the setting of bit XPEN in the
SYSCON register.
- In EMUlation mode, all the XPERipherals
are enabled (XPERCON bit are all set).
The access to external memory and/or
XBus is controlled by the bondout chip.
- When the Real Time Clock is disabled
(RTCEN = 0), the clock oscillator is
switch-off if the ST10 enters in
power-down mode. Otherwise, when the
Real Time Clock is enabled, the bit
RTCOFF of the RTCCON register allows
to choose the power-down mode of the
clock oscillator (See Chapter 16 - Real
Time Clock).
5 - INTERNAL FLASH MEMORY
ST10F269
5.1 - Overview
– 256K Byte on-chip Flash memory
– Two possibilities of Flash mapping into the CPU
address space
– Flash memory can be used for code and data
storage
– 32-bit, zero waitstate read ac cess (50ns cycle
time at f
= 40MHz)
CPU
– Erase-Program Controller (EPC) similar to
M29F400B STM’s stand-alone Flash memo ry
• Word-by-Word Programmable (16µs typ ical)
• Data polling and Toggle Protocol for EPC
Status
• Ready/Busy signal connected on XP2INT
interrupt line
• Internal Power-On detection circuit
– Memory Erase in blocks
• One 16K B yte, t wo 8K Byte, o ne 32K Byte,
three 64K Byte blocks
• Each block can be erased separately
(1.5 second typical)
• Chip erase (8.5 second typical)
• Each block can be separately protected
against programming and erasing
• Each protected block can be temporary unprotected
• When enabled, the read protection prevents
access to data in Flash memory using a program running out of the Flash memory space.
Access to data of internal Flash can only be performed with an inner protected program
– Erase Suspend and Res um e Modes
• Read and Program another Block during erase
suspend
– Single Voltage operat ion , no need of dedicat ed
supply pin
– Low Power Consumption:
• 45mA max. Read current
• 60mA max. Program or Erase current
• Automatic Stand-by-mode (50µA maximum)
– 100,000 Erase-Program Cycles per block,
20 years of data retention time
– Operating tempe rature: -40 to +125
o
C
5.2 - Operational Overview
Read M ode
In standard mode (the normal operating mode)
the Flash ap pears like an on-chip ROM with the
same timing and fu nctionality. The Flash m odule
offers a fast access time, allowing zero waitstate
access with CPU frequency up to 40MHz.
Instruction fetches and data operand reads are
performed with all addressing modes of the
ST10F269 instructi on set.
In order to optimize the programming tim e of the
internal Flash, blocks of 8K Bytes, 16K Bytes,
32K Bytes, 64K Bytes can be used. But the size of
the blocks does not apply to the whole memory
space, see details in Table 2.
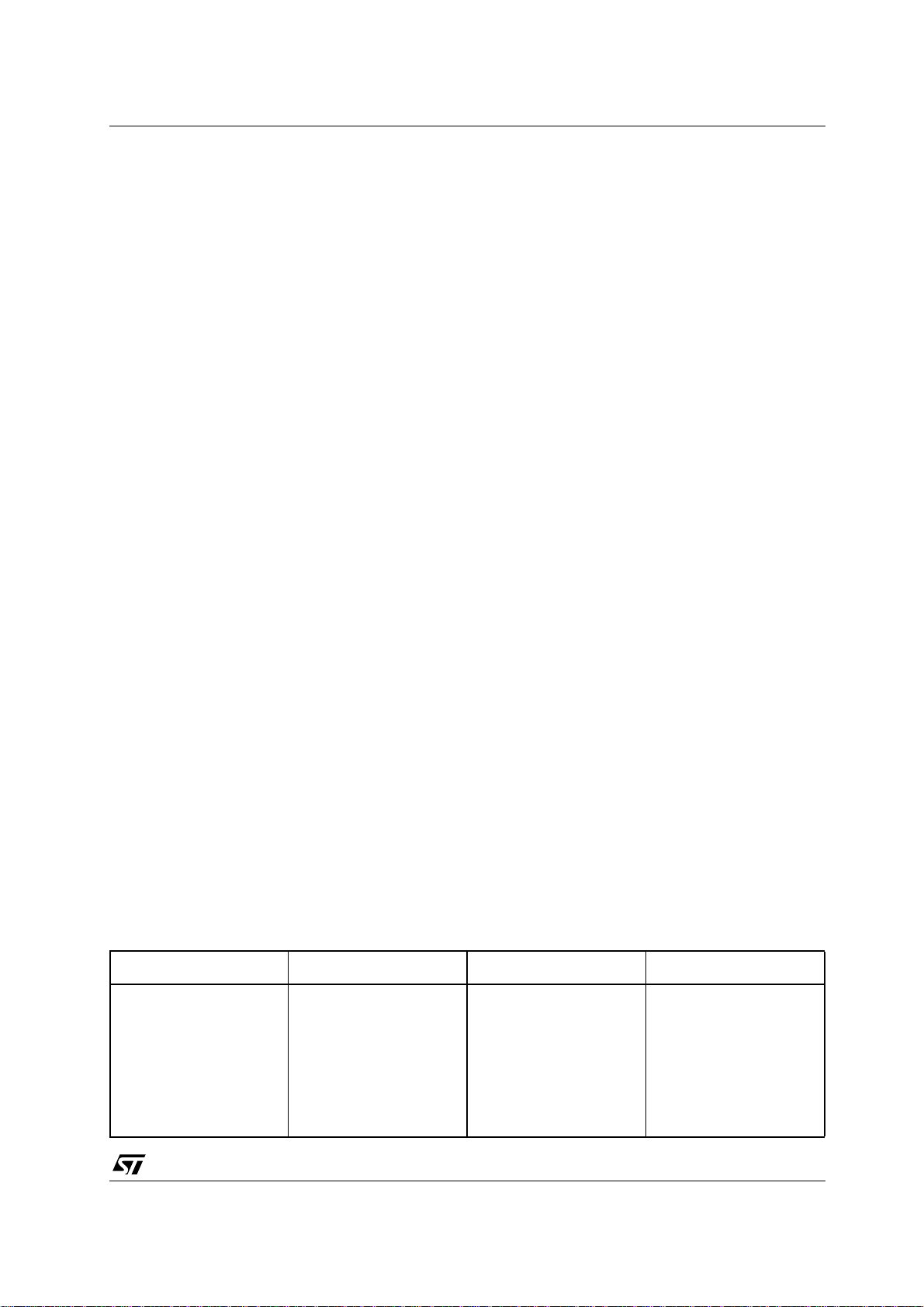
Table 2 :
256K Byte Flash Memor y Block Organisation
Block Addresses (Segment 0) Addresses (Segment 1) Size (byte)
0
1
2
3
4
5
6
00’0000h to 00’3FFFh
00’4000h to 00’5FFFh
00’6000h to 00’7FFFh
01’8000h to 01’FFFFh
02’0000h to 02’FFFFh
03’0000h to 03’FFFFh
04’0000h to 04’FFFFh
01’0000h to 01’3FFFh
01’4000h to 01’5FFFh
01’6000h to 01’7FFFh
01’8000h to 01’FFFFh
02’0000h to 02’FFFFh
03’0000h to 03’FFFFh
04’0000h to 04’FFFFh
16K
8K
8K
32K
64K
64K
64K
17/160

ST10F269
Instructions and Commands
All operations besides normal read operations are
initiated and controlled by command sequences
written to the Flash Com mand Inte rface (CI). The
Command Interface (CI) interprets words written
to the Flash memory and enables one of the
following operations:
– Read memory array
– Program Word
– Block Erase
– Chip Erase
– Erase Suspend
– Erase Resume
– Block Protection
– Block Temporary Unprotection
– Code Protection
Commands are composed of several write cycles
at specific addresses of the Flash memor y. The
different write cycles of such command
sequences offer a fail-safe feature to protect
against an inadvertent write.
A command only starts when the Command
Interface has decoded the last write cycle of an
operation. Until that last write is performed, Flas h
memory remains in Read Mode
Notes: 1. As it is not possible to perform write
operations in the Flash while fetching code
from Flash, the Fl ash commands m ust be
written by instructions executed from
internal RAM or external memory.
one block in parallel. When a time-out period
elaps (96µs) after the last cycle, the
Erase-Program Controller (EPC) automatically
starts and times the erase pulse and executes the
erase operation. There is no need to program the
block to be erased with ‘0000h’ before an erase
operation. Termination of operation is indicated in
the Flash status register. After erase operation,
the Flash memor y locations are read as 'FFFFh’
valu e.
Erase Suspend
A block erase operation is typically executed
within 1.5 second for a 64K Byte block. Erasure of
a memory block may be suspended, in order to
read data from another block or to program data in
another block, and then resumed.
In-System Programming
In-system programming is fully supported. No
special programming voltage is required. Because
of the automatic execution of erase and
programming algorithms, write operations are
reduced to transferring commands and data to the
Flash and reading the status. Any code that
programs or erases Flash memory lo cations (that
writes data to the Flash) must be executed from
memory out side the on-chip Flash memory its elf
(on-chip RAM or external memory).
A boot mechanism is provided to support
in-system programming. It works using seria l link
via USART interface and a PC compatible or other
programming host.
2. Command write c ycles do not need to
be consecutively received, pauses are
allowed, save for Block Erase command.
During this operation all Erase Confirm
commands mus t be sent to c omplete any
block erase operation before time-out
period expires (typically 96µs). Command
sequencing must be followed exactly. Any
invalid combination of commands will reset
the Command Interface to Read Mode.
Status R egister
This register is used to flag the status of the
memory and the result of an operation. This
register can be accessed by read cycles during
the Erase-Program Controller (EPC) operation.
Erase Operation
This Flash memory features a block erase
architecture with a chip erase capability too. Erase
is accomplished by executing the six cycle erase
command sequence. Additional command write
cycles can then be performed to erase more than
18/160
Read/Write Protection
The Flash module supports read and write
protection in a very comfortable and advanced
protection functionality. If Read Protection is
installed, the whole Flash memory is protected
against any "external" read access; read
accesses are only possible with instructions
fetched directly from program Flash memory. For
update of the Flas h memory a temporar y disable
of Flash Read Protection is supported.
The device also features a block write protection.
Software locking of selectable memory blocks is
provided to protect code and data. This feature
will disable both program and erase operations in
the selected block(s) of the memory. Block
Protection is accomplished by block specific
lock-bit which are programmed by executing a
four cycle command sequence. The locked state
of blocks is indicated by specific flags in the
according block status registers. A block may only
be temporarily unlocked for update (write)
operations.

ST10F269
With the two possibilities for write protection whole memory or block specific - a flexible
installation of write protection is supported to
protect the Flash memory or parts of it from
unauthorized programming or erase accesses
and to provide virus-proof protection for all system
code blocks. All write protection also is enabled
during boot operation.
Power Supply, Reset
The Flash module uses a single power supply for
both read and write functions. Internally generated
and regulated voltages are provided for the
program and erase operations from 5V supply.
Once a program or erase cycle has been
completed, the device resets to the standard read
mode. At po wer-on, the Flash memory has a setup
phase of some microseconds (dependent on the
power supply ramp-up). During this phase, Flash
can not be read. Thus, if EA
pin is high (execution
will start from Flash memory), the CPU will remains
in reset state until the Flash ca n be ac cessed.
5.3 - Architectural Description
The Flash module distinguishes two basic
operating modes, the standard read mode and the
command mode. The initial state after power-on
and after reset is the standard read mode.
5.3.1 - Read Mode
The Flash modul e enters the standard operating
mode, the read mode:
– After Reset command
– After every completed erase operation
– After every completed programming operation
– After every other completed command
execution
– Few microseconds after a CPU-reset has
started
– After incorrect address and data values of
command sequences or writing them in an
improper sequence
– After incorrect write access to a read protected
Flash memory
The read mode remains active until the last
command of a command sequence is decoded
which start s directly a Flash array operation, such
as:
– erase one or several blocks
– program a word into Flash array
– protect / temporary unprotect a block.
In the standard read mode read accesses are
directly controlled by the Flash memory array,
delivering a 32-bit double Word from the
addressed position. Read accesses are always
aligned to double Word boundaries. Thus, both
low order address bit A1 and A 0 are not used in
the Flash array for read accesses. The high order
address bit A17/A 16 d efi ne the physical 64K Byte
segment being accessed within the Flash array.
5.3.2 - Command Mode
Every operation besides standard read operations
is initiated by commands written to the Flash
command register. The addresses used for
command cycles define in conjunction with the
actual state the specific step within command
sequences. With the last command of a command
sequence, the Erase-Program Controller (EPC)
starts the execution of the command. The EPC
status is indicated during command execution by:
– The Status Register,
– The Ready/Bu sy signal.
5.3.3 - Ready/Busy Signal
The Ready/Busy (R
XPER2 interr u pt node (XP2IC). When R
/B) signal is connected to the
/B is high,
the Flash is busy with a Program or Erase
operation and will not accept any additional
program or erase instruction. When R
/B is Low,
the Flash is ready for any Read/Write or Erase
operation. The R
/B will also be low when the
memory is put in Erase Suspend mo de.
This signal can be polled by reading XP2IC
register, or can be used to trigger an interrupt
when the Flash goes from Busy to Ready.
5.3.4 - Flash Status Register
The Flash Status register is used to flag the status
of the Flash memory and the result of an
operation. This register can be accessed by Read
cycles during the program-Erase Controller
operations. The program or erase operation can
be controlled by data polling on bit FSB.7 of
Status Register, detection of Toggle on FSB.6 and
FSB.2, or Error on FSB.5 and Erase Timeout on
FSB.3 bit. Any read at tempt in Flash du ring EPC
operation will a utomatic ally ou tput thes e five bits.
The EPC sets bit FSB.2, FSB.3, FSB.5, FSB.6
and FSB.7. Other bits are reserved for future use
and should be masked.
19/160
ST10F269
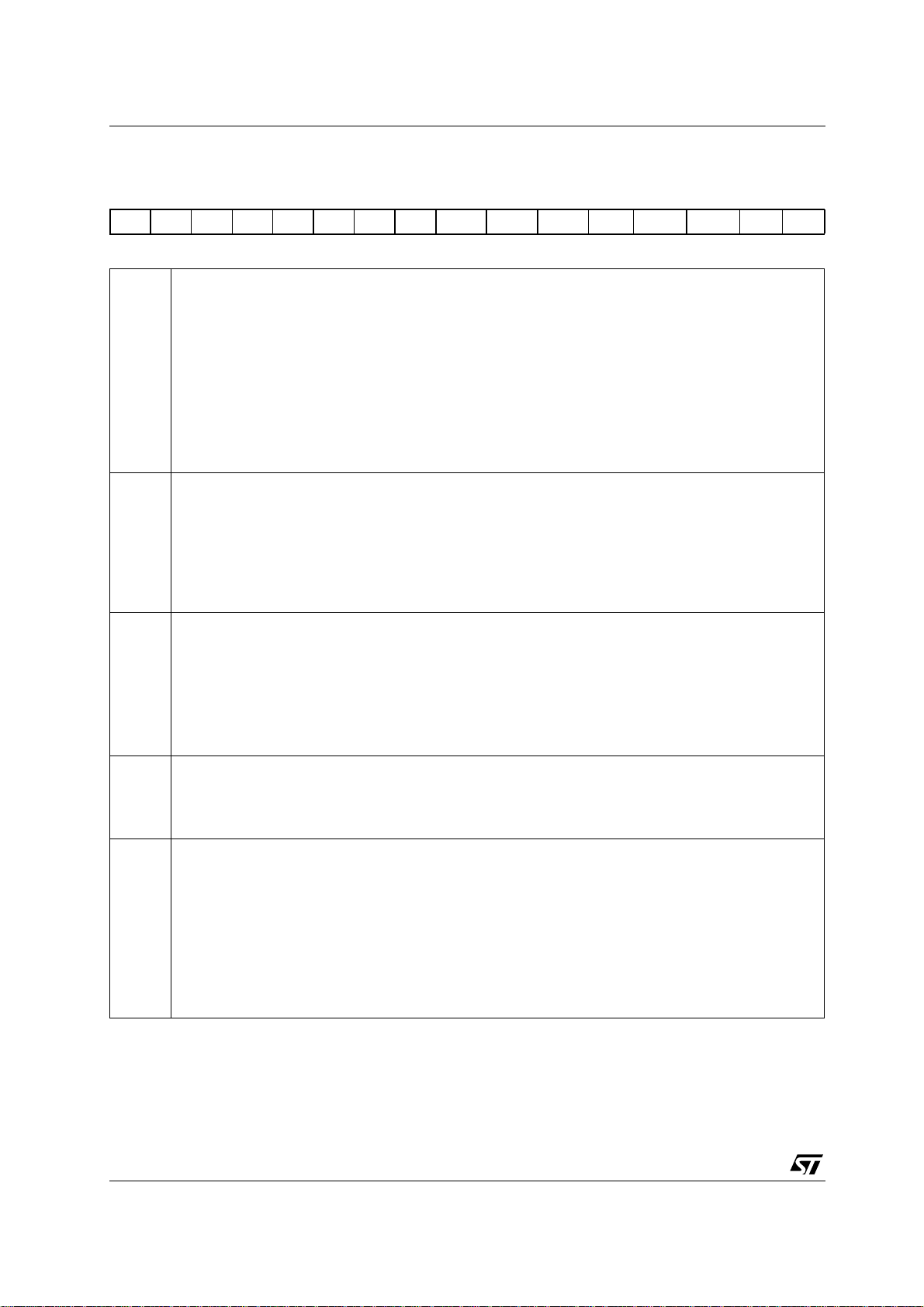
Flash Status (see note for address)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
-------
FSB.7
Flash Status bit 7: Data Polling Bit
- FSB.7 FSB.6 FSB.5 - FSB.3 FSB.2 -
RRR R R
Programming Operation: this bit outputs the complement of the bit 7 of the word being
programmed, and after completion, will output the bit 7 of the word programmed.
Erasing Operation: outputs a ‘0’ during erasing, and ‘1’ after erasing completion.
If the block selected for erasure is (are) protected, FSB.7 will be set to ‘0’ for about 100 µs, and
then return to the previous addressed memory data value.
FSB.7 will also flag t he Erase Suspend Mode by switching from ‘0’ t o ‘1’ at the start of the
Erase Suspend.
During Program operation in Erase Suspend Mode, FSB.7 will have the same behaviour as in
normal Program execution outside the Suspend mode.
FSB.6
Flash Stat us bi t 6: Toggle Bit
Programming or Erasing Operations: successive read operations of Flash Status register will
deliver complementary values. FSB.6 will toggle each time the Flash Status register is read.
The Program operation is completed wh en two successive reads yield the same value. The
next read will output the bit last programmed, or a ‘1’ after Erase operation
FSB.6 will be set to‘1’ if a read operation is attempted on an Erase Suspended block. In
addition, an Erase Suspend/Resume command will cause FSB.6 to toggle.
-
FSB.5
Flash Status bit 5: Error Bit
This bit is set to ‘1’ when there is a failure of Program, block or chip erase operations.This bit
will also be set if a user tries to program a bit to ‘1’ to a Flash location that is currently
programmed with ‘0’.
The error bit resets after Read/Reset instruction.
In case of success, the Err or bit wil l be s et to ‘0’ during Program or Eras e and then will output
the bit last programmed or a ‘1’ after erasing
FSB.3
Flash Status bit 3: Erase Time-out Bit
This bit is cleared by the EPC when the l ast Block Erase command has been en tered to the
Command Interface and it is awaiting the Erase star t. When the time-out period i s finished,
after 96 µs, FSB.3 returns back to ‘1’.
FSB.2
Flash Stat us bi t 2: Toggle Bit
This toggle bit, together with FSB.6, can be used to determine the chip status during the Erase
Mode or Erase Suspend Mode. It can be used also to identify the block being Erased
Suspended. A Read operation will cause FSB.2 to Toggle during the Erase Mode. If the Flash
is in Erase Suspend Mode, a Read operation from the Erase suspended block or a Program
operation into the Erase suspended block will cause FSB.2 to toggle.
When the Flash is in Program Mode during Erase Suspend, FSB.2 will be read as ‘1’ if address
used is the address of the word being programmed.
After Erase completion with an Error status, FSB.2 will toggle when reading the faulty sector.
Note: The Address of Flash Status Register is the address of the word being programmed when
Programming operation is in progress, or an address within block being erased when Erasing
operation is in progress.
20/160
ST10F269
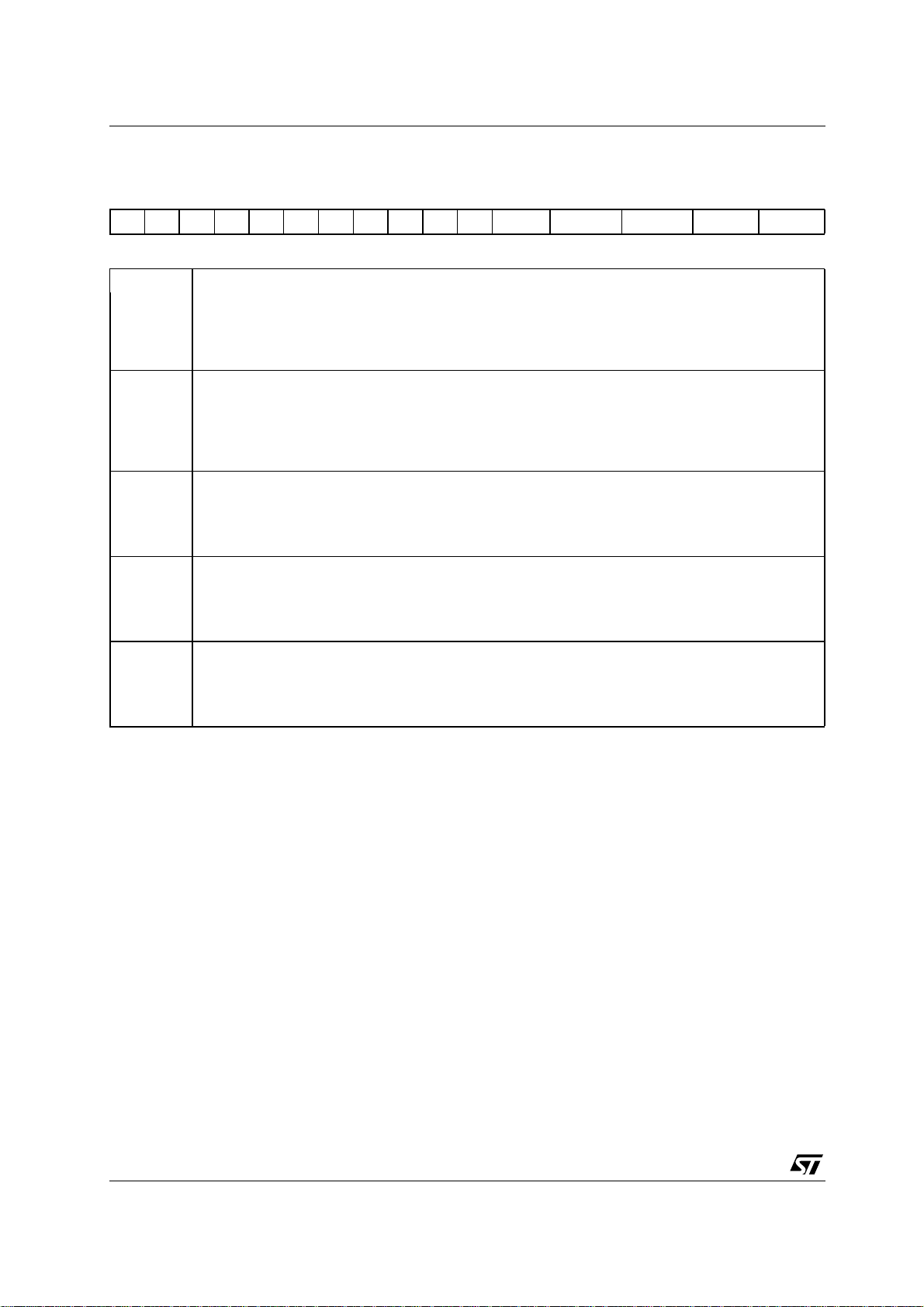
5.3.5 - Flash Protection Register
The Flash Protection register is a non-volatile register that contains the protection status. This register
can be read by using the Read Prote ction Status (RP) command, and programmed by using the de dicated Set Protection command.
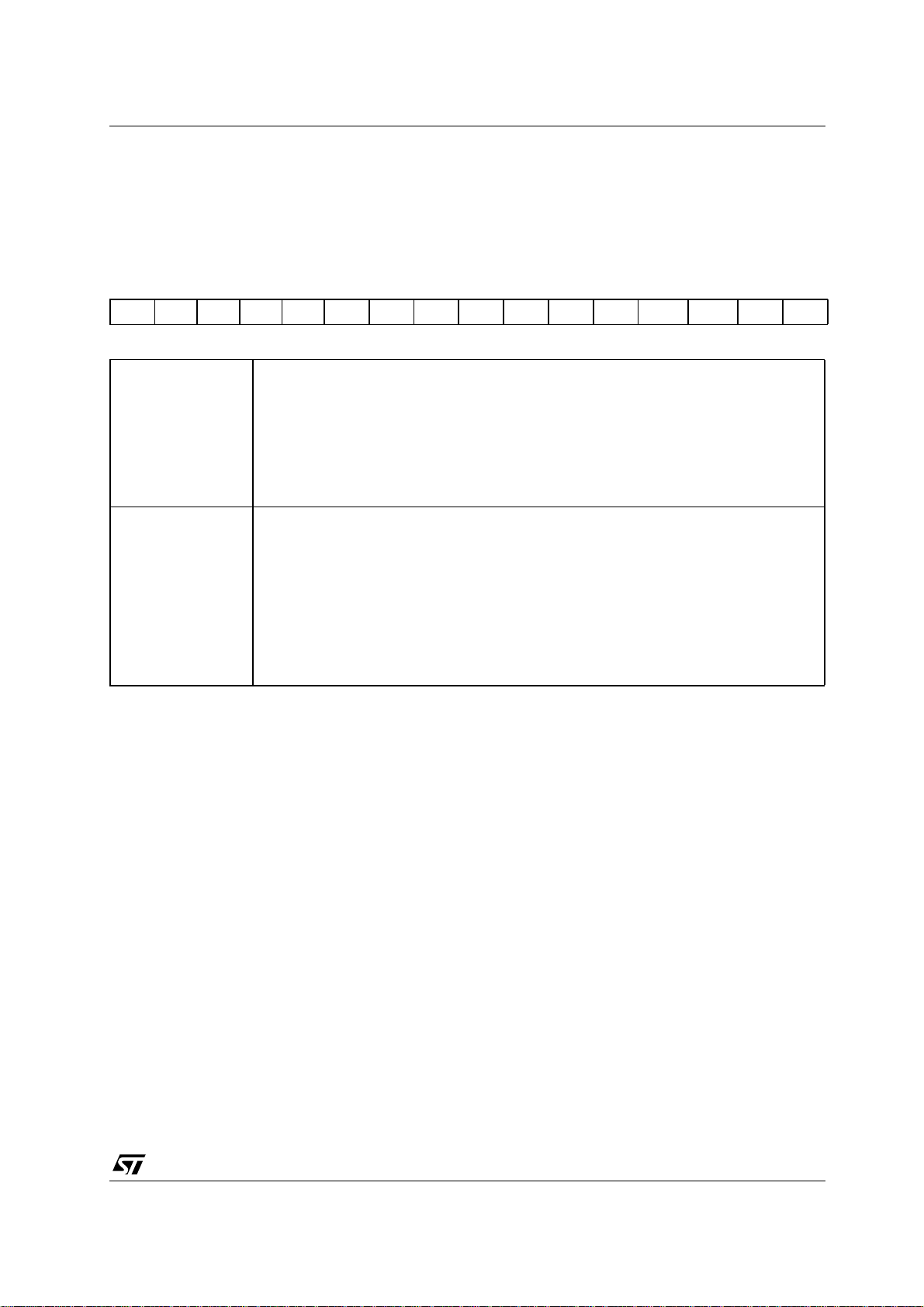
Flash Protection Register (PR)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
CP - - - - - - - - BP6 BP5 BP4 BP3 BP2 BP1 BP0
BPx
CP
Block x Protection Bit (x = 0...6)
‘0’: the Block Protection is enabled for block x. Programming or erasing the block is not
possible, unless a Block Temporary Unprotection command is issued.
1’: the Block Protection is disabled for block x.
Bit is ‘1’ by default, and can be programmed permanently to ‘0’ using the Set Protection
command but then cannot be set to ‘1’ again. It is therefore possible to temporally disable the
Block Protection using the Block Temporary Unprotection instruction.
Code Protection Bit
‘0’: the Flash Code Protection is enabled. Read accesses to the Flash for execution not
performed in the Flash itself are not allowed, the returned value will be 009Bh, whatever the
content of the Flash is.
1’: the Flash Code Protection is disabled: read accesses to the Flash from external or internal
RAM are allowed
Bit is ‘1’ by default, and can be programmed permanently to ‘0’ using the Set Protection
command but then cannot be set to ‘1’ again. It is therefore possible to temporally disable the
Code Protection using the Code Temporary Unprotection instruction.
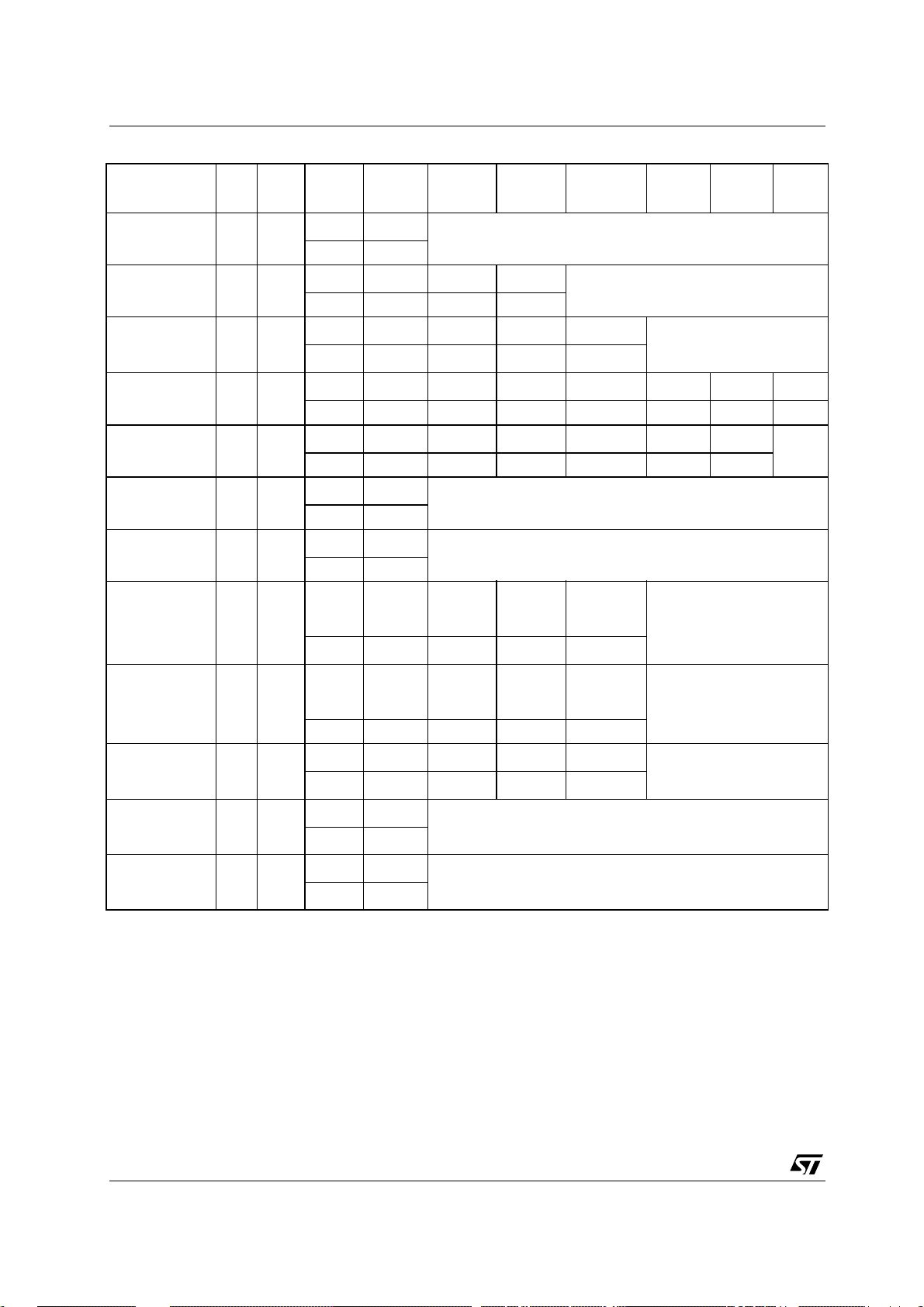
5.3.6 - Instructions Description
Twelve instructions dedicated to Flash memory
accesses are defined as follow:
Read/Reset (RD).
The Read/Reset instruction
consist of one write cycle with data XXF0h . it can
be optionally preceded by two CI enable
coded
cycles (data xxA8h at address 1554h + data
xx54h at address 2AA8h). Any successive read
cycle following a Read/Reset instruction will read
the memory array. A Wait cycle of 10µs is
necessary after a Read/Reset command if the
memory was in program or Erase mode.
Program Word (PW).
This instruction uses four
write cycles. After the two Cl enable coded cycles ,
the Program Word command xxA0 h is written at
address 1554h. The following write cycle will latch
the address and data of the word to be
programmed. Memor y programming can be do ne
only by writing 0's instead of 1's, otherwise an
error occurs. During programming, the Flash
Status is checked by reading the Flash Status bit
FSB.2, FSB.5, FSB.6 and FSB.7 which show the
status of the EPC. FSB.2, FSB.6 and FSB.7
determine if programming is on going or has
completed, and FSB.5 allows a check to be made
for any possible error.
Block Erase (BE).
This instruction uses a
minimum of six command cycles. The erase
enable command xx80h is written at address
1554h after the two-cycle CI enable sequence.
The erase confirm code xx30h must be written at
an address related to the block to be erased
preceded by the execution of a second CI enable
sequence. Additional erase confirm codes must
be given to erase more than one block in parallel.
Additional erase confirm commands must be
written within a defined time-ou t peri od. The input
of a new Block Erase command will restart the
time-out period.
When this time-out period has elapsed, the erase
starts. The status of the internal timer can be
monitored through the level of FSB.3, if FSB.3 is
‘0’, the Block Erase command has been given and
the timeout is running ; if FSB.3 is ‘1’, the timeout
has expired and the EPC is erasing the block(s).
21/160

ST10F269
If the second command given is not an erase
confirm or if the coded cycles are wrong, the
instruction aborts, and the device is reset to Read
Mode. It is not necessary to progr am the bloc k wi th
0000h as the EPC will do this automatically before
the erasing to FFFFh. Read operations after the
EPC has started, output the Flash Status Register .
During the execution of the erase by the EPC, the
device accepts only the Erase Suspend and
Read/Reset instructions. Data Polling bit FSB.7
returns ‘0’ while the erasure is in progress, and ‘1’
when it has completed. The Toggle bit FSB.2 and
FSB.6 toggle during the erase operation. They
stop when erase is completed. After completion,
the Error bit FSB.5 returns ‘1’ if there has been an
erase failure because erasure has not comp leted
even after the maximum number of erase cycles
have been executed by the EPC, in this case, it
will be necessary to input a Read/Reset to the
Command Interface in order to reset the EPC.
Chip Erase (CE)
. This instruction uses six write
cycles. The Erase Enable command xx80h, must
be written at address 1554h after CI-Enable
cycles. The Chip Erase command xx10h must be
given on the sixth cycle after a second CI-Enable
sequence. An error in command sequence will
reset the CI to Read mode. It is NOT necessary to
program the block with 0000h as the E PC will do
this automatically before the erasing to FFFFh.
Read operations after the EPC has star ted out put
the Flash Status Register. During the execution of
the erase by the EPC, Data Polling bit FSB.7
returns ‘0’ while the erasure is in progress, and ‘1’
when it has completed. The FSB.2 and FSB.6 bit
toggle during the erase operation. They stop when
erase is finished. The FSB.5 error bit returns "1" in
case of failure of the erase operation. The error
flag is set after the maximum number of erase
cycles have been executed by the EPC. In this
case, it will be necessary to input a Read/Reset to
the Command Interface in order to reset the EPC.
Erase Suspend (ES).
This instruction can be
used to suspend a Block Erase operation by
giving the command xxB0h without any specific
address. No CI-Enable cycles is required. Erase
Suspend operation allows reading of data from
another block and/or the programming in another
block while erase is in progress. If this com mand
is given during the time-out period, it will terminate
the time-out period in addition to erase Suspend.
The Toggle bit FSB.6, when monitored at an
address that b elongs to the block being erased,
stops toggling when Erase Suspend Command is
effective, It happens between 0.1µs and 15µs
after the Erase Suspend Command has been
written. The Flash will then go in normal Read
Mode, and read from blocks not being erased is
valid, while read from block being erased will
output FSB.2 toggling. Dur ing a Suspend phase
the only instructions valid are Erase Resume and
Program Word. A Read / Reset instruction d uring
Erase suspend wi ll definitely abor t t he Erase a nd
result in invalid data in the block being erased.
Erase Resume (ER).
This instruction can be
given when the memory is in Erase Suspend
State. Erase can be resumed by writing the
command xx30h at any address without any
Cl-enable sequence.
Program during Erase Sus pend.
The Program
Word instruction during Erase Suspend is allowed
only on blocks that are not Erase-suspended. This
instruction is the same than the Program Word
instruction.
Set Prote c t ion (SP).
This instruction can be used
to enable both Block Protection (to protect each
block independently from accidental Erasing-Programming Operation) and Code Protection (to
avoid code dump). The Set Protection Com mand
must be given after a s pecial CI -Protection Enab le
cycles (see instruction table). The following Write
cycle, will pr ogram the Protecti on Regist er. To protect the block x (x = 0 to 6), the data bit x must be
at ‘0’. To protect the code, b it 15 of the data must
be ‘0’. Enabling Block or Code Protec tion is
manent
and can be cleared only by STM. Block
per-
Temporary Unprotection and Code Temporary
Unprotection instructions are available to allow the
customer to update the code.
Notes: 1. The new value programmed i n prot ectio n
register will only become active after a reset.
2. Bit that are already at ’0’ in protection
register must be confirmed at ’0’ also in
data latched during the 4th cycle of set
protection command, otherwise an error
may occur.
Read Protection Status (RP).
This in struct ion is
used to read the Block Protection status and the
Code Protection status. To read the protection
register (see Table 3), the CI-Protection Enable
cycles must be executed followed by the
command xx90h at address x2A54h. The
following Read Cycles at any odd word address
will output the Block Protection Status. The Read/
Reset command xxF0h must be written to reset
the protection interface.
Note: After a modification of protection register
(using Set Protection command), the Read
Protection Status will return the new PR
value only after a reset.
22/160

ST10F269
Block Temporary Unprotection (BTU).
This Instruction can be used to temporary unprotect all the
blocks from Program / Erase protection. The Unprotection is disabled after a Reset cycle. The Block
Tem porary Unprotection command xxC 1h must be given to enable Block Temporar y Unprotection. The
Command must be preceded by the CI-Protection Enable cycles and followed by the Read/Reset
command xxF0h.
Set Code Protec tion ( SCP).
This kind of protection allows the customer to protect the proprietary code
written in Flash. If installed and active, Flash Code Protection prevents data operand accesses and
program branches into the on-chip Flas h area from any location outside the Flash memor y itself. Data
operand accesses and branches to Flash locations are only and exclusively allowed for instructions
ex ecuted from the Flash memory itself. Every read or jump to Flash performed from another memory (like
internal RA M , external m emory) while C ode Protec t ion is enabled, w ill give the opc od e 009B h related to
TRAP #00 illegal instruction. The CI-Protection Enable cycles must be sent to set the Code Protection. By
writing data 7FFFh at any odd word addre ss, the Code Protec ted status is stored in the Flash Pr otec tion
Register (PR). Protection is permanent and canno t be cleared by the user. It is possible to temporarily
disable the Code Protection using Code Temporary Unprotection instruction.
Note: Bits that are already at ’0’ in protection register must be confirmed at ’0’ also in data latched during
the 4th cycle of set protection command, otherwise an error may occur.
Code Temporary Unprotection (CTU).
This instruction must be used to temporary disable Code
Protection. This instruction is effective only if executed from Flash memory space. To restore the
protection status, without using a reset, it is necessary to use a Code Tempo rary Protection instruct ion.
System reset will res et also t he Code Temporary Unprotected status. The Code Temporary Unprot ecti on
command consists of the following write cycle:
MOV MEM, Rn ; This instruction MUST be executed from Flash memory space
Where MEM is an absolute address inside memor y spa ce, Rn is a register loaded with data 0FFFFh.
Code Temporary Protection (CTP).
This instruction allows to restore Code Protection. This operation is
effective only if executed from Flash memory and is necessar y to restore the protection status after the
use of a Code Temporary Unprotection instruction.
The Code Temporary Protection command consists of the following write cycle:
MOV MEM, Rn ; This instruction MUST be executed from Flash memory space
Where MEM is an absolute address inside memor y spa ce, Rn is a register loaded with data 0FFFBh.
Note that Code Temporary Unprotection instruction must be used when it is necessar y to modify the
Flash with protected code (SCP), since the write/erase routines must be executed from a memory
external to Flash space. Usually, the write/erase routines, executed in RAM, ends with a retur n to Flash
space where a CTP instruction restore the protection.
23/160
ST10F269
Table 3 :
Instruction Mne Cycle
Read/Reset RD 1+
Instructions
Addr.
st
1
Cycle
1
X
2
2nd
Cycle
3rd
Cycle
4th Cycle
5th
Cycle
6th
Cycle
Read Memory Array until a new write cycle is initiated
Data xxF0h
1
Read/Reset RD 3+
Program Word PW 4
Block Erase BE 6
Addr.
Data xxA8h xx54h xxF0h
Addr.
Data xxA8h xx54h xxA0h
Addr.
x1554h x2AA8h xxxxxh
Read Memory Array until a new write
cycle is initiated
1
x1554h x2AA8h x1554h
1
x1554h x2AA8h x1554h x1554h x2AA8h BA
WA
WD
3
Read Data Polling or Toggle bit until Program com-
4
pletes.
Data xxA8h xx54h xx80h xxA8h xx54h xx30h xx30h
1
Chip Erase CE 6
Addr.
x1554h x2AA8h x 1554h x1554h x2AA8 h x15 54h
Data xxA8h xx54h xx80h xxA8h xx54h xx10h
1
Erase Suspend ES 1
Addr.
Data xxB0h
1
Erase Resume ER 1
Addr.
Data xx30h
Set Block/Code
Protection
Addr.
1
SP 4
Data xxA8h xx54h xxC0h
Read
Protection
Status
RP 4
Addr.
1
Data xxA8h xx54h xx90h R ead PR
Block
Temp orar y
BTU 4
Unprotection
Code
Temp orar y
CTU 1
Unprotection
Code
Temporary
CTP 1
Protection
Notes 1. Addre ss bit A14, A1 5 and above are don’t c are for coded address inputs.
2. X = Don’t Care.
3. WA = Write Address: address o f memory l ocation to be programmed.
4. WD = Write Data: 16-bit data to be programmed
5. Optional, addi tional blocks addresses m ust be en te red withi n a time-out delay (96 µs) afte r l ast wri te entry, timeout status can be
verified through FSB.3 value. When full command is entered, read Data Polling or Toggle bit until Erase is completed or suspended.
6. Read Data Polling or Toggle bit until Erase completes.
7. WPR = W rite prot ection register. To protect code, bit 15 of WPR must be ‘ 0’. To protect block N (N=0, 1,...), bi t N of WPR must b e
‘0’. Bit that are already at ‘0’ in protection register must also be ‘0’ in WPR, else a writing error will occurs (it is not possible to write a
‘1’ in a bit already programmed at ‘0’).
8. MEM = any address in side the Flash m em ory s pace. Absolute add ressing m ode must be used (MOV MEM, Rn), and instruction
must be executed from F l ash memor y space.
9. Odd word address = 4n-2 wh ere n = 0, 1, 2, 3..., ex. 000 2h, 0006h...
1
Addr.
Data xxA8h xx54h xxC1h xxF0h
1
Addr.
Data FFFFh
1
Addr.
Data FFFBh
2
X
Read until Toggle stops, then read or program all data needed
from block(s) not being erased then Resume Erase.
2
X
Read Data Polling or Toggle bit until Erase completes or Erase is
supended another time.
x2A54h x15A8h x2A54h Any odd
word
address
7
WPR
x2A54h x15A8h x2A54h Any odd
word
address
x2A54h x15A8h x2 A54h
8
MEM
MEM
Write cycles must be executed from Flash.
8
Write cycles must be executed from Flash.
2
X
9
Read Protection Register
9
until a new write cycle is
initiated.
7th
Cycle
BA’
Note
5
6
24/160

ST10F269
– Generally, command sequences cannot be
written to Flash by instructions fetched from the
Flash itself. Thus, the Flash commands must be
written by instructions, executed from internal
RAM or external memory.
– Command cycles on the CPU interface need not
to be consecutively recei ved (pauses allowed).
The CPU interface delivers dummy read data for
not used cycles within command sequences.
– All addresses of command cycles shall be
defined only with
Register-indirect
addressing
mode in the according move instructi o ns. Di re ct
addressing is not allowed for command
sequences. Address segment or data page
pointer are taken into account for the com mand
address value.
5.3.7 - Reset Processing and Initial State
The Flash module distinguishes two kinds of CPU
reset types
The lengthening of CPU reset:
– Is not reported to external devices by
bidirectional pin
– Is not enabled in case of external start of CPU
after reset.
5.4 - Flash Memory Configuration
The default memory configuration of the
ST10F269 Memor y is determine d by the state of
the EA
pin at reset. This value is stored in the
Internal ROM Enable bit (named ROMEN) of the
SYSCON register.
When ROMEN = 0, the interna l Flash is disabled
and external ROM is used for startup control.
Flash memor y can l ate r be enabled by setting the
ROMEN bit of SYSCON to 1. The code
performing this setting must not run from a
segment of the extern al ROM to be replaced by a
segment of the Flash memory, otherwise
unexpected behaviour may occur.
For example, if external ROM code is loca ted in
the first 32K Bytes of segment 0, the first
32K B ytes of the Flash must then be enabled in
segment 1. This is done by setting the ROMS1 bit
of SYSCON to 0 before or simultaneously with
setting of ROMEN bit. This must be done in the
externally supplied program before the execution
of the EINIT instruction.
If program execution start s from external memory,
but access to the Flash memory mapped in
segment 0 is later required, then the code that
performs the setting of ROMEN bit must be
executed either in the segment 0 but above
address 00’8000h, or from the internal RAM.
Bit ROMS1 only affects the mapping of the first
32K B ytes of the Flash memory. All other parts of
the Flash memory (addresses 01’8000h 04’FFFFh) remain unaffected.
The SGTDIS Segmentation Disable / Enable must
also be set to 0 to allow the use of the full
256K B ytes of on-chip mem ory in addit ion to the
external boot memor y. The correct procedure on
changing the segmentation registers must also be
observed to prevent an unwanted trap condition:
– Instructions that configure the internal mem ory
must only be executed from external memory or
from the internal RAM.
– An Absolute Inter-Segment Jump (JMPS)
instruction must be executed after Flash
enabling, to the next instruction, even if this next
instruction is located in the consecutive address.
– Whenever the internal Memory is disabled,
enabled or remapped, the DPPs must be
explicitly (re)loaded to enable correct data
accesses to the internal memory and/or external
memory.
5.5 - Application Examples
5.5.1 - Handling of Flash Addresses
All command, Block, Data and register addresses
to the Flash have to be located within the active
Flash memory space. The active space is that
address range to which the physical Flash
addresses are mapped as defined by the user.
When using data page pointer (DPP) for block
addresses make sure that address bit A15 and
A14 of the block address are reflected in both
LSBs of the selected DPPS.
Note: - For Command Instructions, address bit
A14, A15, A16 and A17 are don’t care.
This simplify a lot the appl ication sof tware,
because it minimize the use of DPP registers when using Command in the Command Interface.
- Direct addressing is not allowed for
Command sequence operations to the
Flash. Only Register-indirect addressing
can be used for command, block or
write-data accesses.
25/160

ST10F269
5.5.2 - Basic Flash Access Control
When accessing the Flash all command write addresses have to be located within the active Flash
memory space. The active Flash memor y space is that logical address range which i s covered by the
Flash after mapping. When using data page pointer (DPP) for addressing the Flash, make sure that
address bit A15 and A14 of the command addresses are reflected in both LSBs of the selected data page
pointer (A15 - DPPx.1 and A14 - DPPx.0).
In case of the command write addresses, address bit A14, A15 and above are don’t care. Thus, command
writes can be performed by only using one DPP register. This allow to have a more simple and compact
application software.
Another - advantageous - possibility is to use the extended segment instruc tion for addressing.
Note: The direct addressing mode is not allowed for write access to the Flash address/command
register. Be aware that the C compiler may use this kind of addressing. For write accesses to
Flash module always the
The following basic instruction sequences show examples for different addressing possibilities.
Principle example of address generation for Flash commands an d registers:
When using data page pointer (DPP0 is this example)
MOV DPP0,#08h ;adjust data page pointers according to the
indirect
addressing mode has to be selected.
;addresses: DPP0 is used in this example, thus
;ADDRESS must have A14 and A15 bit set to ‘0’.
MOV Rw
,#ADDRESS ;ADDRESS could be a dedicated command sequence
m
;address 2AA8h, 1554h ... ) or the Flash write
;address
MOV Rw
,#DATA ;DATA could be a dedicated command sequence data
n
;(xxA0h,xx80h ... ) or data to be programmed
MOV [Rw
],Rw
m
n
;indirect addressing
When using the extended segment instruction:
MOV Rw
,#ADDRESS ;ADDRESS could be a dedicated command sequence
m
;address (2AA8h, 1554h ... ) or the Flash write
;address
MOV Rw
,#DATA ;DATA could be a dedicated command sequence data
o
;(xxA0h,xx80h ... ) or data to be programmed
MOV Rw
,#SEGMENT ;the value of SEGMENT represents the segment
n
;number and could be 0, 1, 2, 3 or 4 (depending
;on sector mapping) for 256KByte Flash.
EXTS Rw
,#LENGTH ;the value of Rwn determines the 8-bit segment
n
;valid for the corresponding data access for any
;long or indirect address in the following(s)
;instruction(s). LENGTH defines the number of
;the effected instruction(s) and has to be a value
;between 1...4
MOV [Rw
26/160
],Rw
m
o
;indirect addressing with segment number from
;EXTS

ST10F269
5.5.3 - Programming Examples
Most of the microcont roller programs are written in the C language where th e data page pointers are
automatically set by the compiler. But because the C compiler may use the not allowed direct addressing
mode for Flash write addresses, it is necessary to program the organisational Flash accesses (command
sequences) with assembler in-line routines which use indirect addressing.
Example 1
We assume that in the initialization phase the lowest 32K Bytes of Flash mem ory (sector 0) have been
mapped to segment 1.
According to the usual way of ST10 data addressing with data page pointers, address bit A15 and A14 of
a 16-bit command write addres s select the data pag e pointer (DP P) which con tains the up per 10-bit for
building the 24-bit physical data address. Address bit A13...A0 represent the addres s offset. As the bit
A14...A17 are "don’t care" when written a Flash command in the Command Interface (CI), we can choose
the most conveniant DPPx register for address handling.
The following examples are making usage of DPP0. We just have to make sure, that DPP0 points to
active Flash memory space.
To be indep endent of mapping of sector 0 we choose for all DPPs which are used for Flash address
handling, to point to segment 2.
For this reason we load DPP0 with value 08h (00 0000 l000b).
MOV R5, #01554h ;load auxilary register R5 with command address
MOV R6, #02AA8h ;load auxilary register R6 with command address
SCXT DPPO, #08h ;push data page pointer 0 and load it to point to
MOV R7, #0A8h ;load register R7 with 1st CI enable command
MOV [R5], R7 ;command cycle 1
MOV R7, #054h ;load register R7 with 2cd CI enable command
MOV [R6], R7 ;command cycle 2
MOV R7, #0F0h ;load register R7 with Read/Reset command
MOV [R5], R7 ;command cycle 3. Address is don’t care
POP DPP0 ;restore DPP0 value
Performing the command R ead/Res et
;(used in command cycle 1)
;(used in command cycle 2)
;segment 2
In the example above the 16-bit registers R5 and R6 are used as auxilary registers for indirect
addressing.
Example 2
Performing a Program Word command
We assume that in the initialization phase the lowest 32K Bytes of Flash mem ory (sector 0) have been
mapped to segme nt 1.T he data to be written is loaded in register R13, the address to be programme d is
loaded in register R11/R12 (segment number in R11, segment offset in R12).
MOV R5, #01554h ;load auxilary register R5 with command address
;(used in command cycle 1)
MOV R6, #02AA8h ;load auxilary register R6 with command address
;(used in command cycle 2)
SXCT DPPO, #08h ;push data page pointer 0 and load it to point to
;segment 2
MOV R7, #0A8h ;load register R7 with 1st CI enable command
MOV [R5], R7 ;command cycle 1
MOV R7, #054h ;load register R7 with 2cd CI enable command
MOV [R6], R7 ;command cycle 2
MOV R7, #0A0h ;load register R7 with Program Word command
MOV [R5], R7 ;command cycle 3
27/160

ST10F269
POP DPP0 ;restore DPP0: following addressing to the Flash
;will use EXTended instructions
;R11 contains the segment to be programmed
;R12 contains the segment offset address to be
;programmed
;R13 contains the data to be programmed
EXTS R11, #1 ;use EXTended addressing for next MOV instruction
MOV [R12], R13 ;command cycle 4: the EPC starts execution of
;Programming Command
Data_Polling:
EXTS R11, #1 ;use EXTended addressing for next MOV instruction
MOV R7, [R12] ;read Flash Status register (FSB) in R7
MOV R6, R7 ;save it in R6 register
;Check if FSB.7 = Data.7 (i.e. R7.7 = R13.7)
XOR R7, R13
JNB R7.7, Prog_OK
;Check if FSB.5 = 1 (Programming Error)
JNB R6.5, Data_Polling
;Programming Error: verify is Flash programmed
;data is OK
EXTS R11, #1 ;use EXTended addressing for next MOV instruction
MOV R7, [R12] ;read Flash Status register (FSB) in R7
;Check if FSB.7 = Data.7
XOR R7, R13
JNB R7.7, Prog_OK
;Programming failed: Flash remains in Write
;Operation.
;To go back to normal Read operations, a Read/Reset
;command
;must be performed
Prog_Error:
MOV R7, #0F0h ;load register R7 with Read/Reset command
EXTS R11, #1 ;use EXTended addressing for next MOV instruction
MOV [R12], R7 ;address is don’t care for Read/Reset command
... ;here place specific Error handling code
...
...
;When programming operation finished succesfully,
;Flash is set back automatically to normal Read Mode
Prog_OK:
....
....
28/160

ST10F269
Example 3
Perf orming the Block Erase command
We assume that in the initialization phase the lowest 32K Bytes of Flash mem ory (sector 0) have been
mapped to segment 1.The registers R11/R12 contain an address related to the block to be erased
(segment number in R11, segment offset in R12, for e xample R11 = 01h, R12= 4000h will erase the block
1 - first 8K byte block).
MOV R5, #01554h ;load auxilary register R5 with command address
;(used in command cycle 1)
MOV R6, #02AA8h ;load auxilary register R6 with command address
;(used in command cycle 2)
SXCT DPPO, #08h ;push data page pointer 0 and load it to point ;to
;segment 2
MOV R7, #0A8h ;load register R7 with 1st CI enable command
MOV [R5], R7 ;command cycle 1
MOV R7, #054h ;load register R7 with 2cd CI enable command
MOV [R6], R7 ;command cycle 2
MOV R7, #080h ;load register R7 with Block Erase command
MOV [R5], R7 ;command cycle 3
MOV R7, #0A8h ;load register R7 with 1st CI enable command
MOV [R5], R7 ;command cycle 4
MOV R7, #054h ;load register R7 with 2cd CI enable command
MOV [R6], R7 ;command cycle 5
POP DPP0 ;restore DPP0: following addressing to the Flash
;will use EXTended instructions
;R11 contains the segment of the block to be erased
;R12 contains the segment offset address of the
;block to be erased
MOV R7, #030h ;load register R7 with erase confirm code
EXTS R11, #1 ;use EXTended addressing for next MOV instruction
MOV [R12], R7 ;command cycle 6: the EPC starts execution of
;Erasing Command
Erase_Polling:
EXTS R11, #1 ;use EXTended addressing for next MOV instruction
MOV R7, [R12] ;read Flash Status register (FSB) in R7
;Check if FSB.7 = ‘1’ (i.e. R7.7 = ‘1’)
JB R7.7, Erase_OK
;Check if FSB.5 = 1 (Erasing Error)
JNB R7.5, Erase_Polling
;Programming failed: Flash remains in Write
;Operation.
;To go back to normal Read operations, a Read/Reset
;command
;must be performed
Erase_Error:
MOV R7, #0F0h ;load register R7 with Read/Reset command
EXTS R11, #1 ;use EXTended addressing for next MOV instruction
MOV [R12], R7 ;address is don’t care for Read/Reset command
... ;here place specific Error handling code
...
...
;When erasing operation finished succesfully,
;Flash is set back automatically to normal Read Mode
Erase_OK:
....
....
29/160
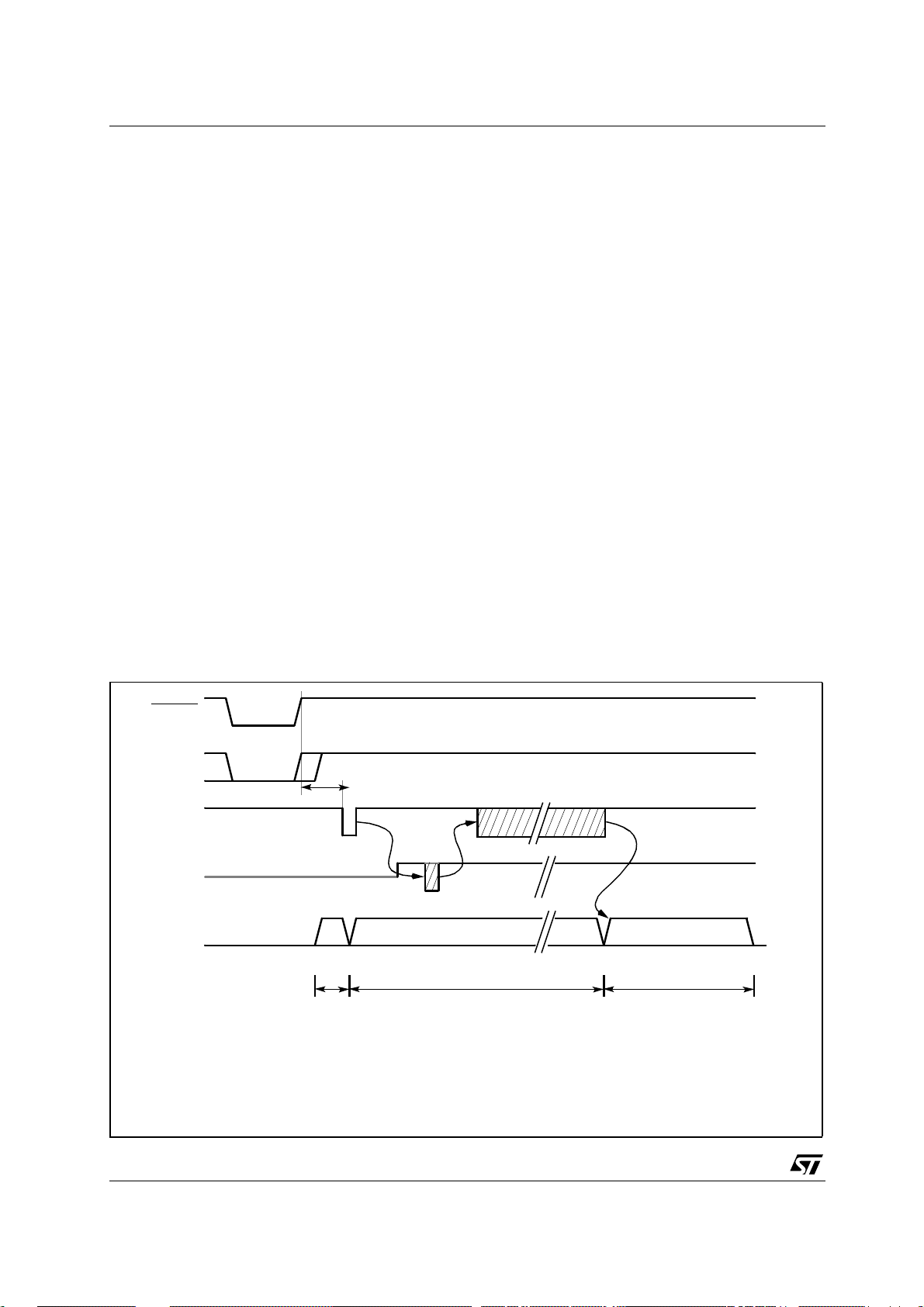
ST10F269
5.6 - Bootstrap Loader
The built-in bootstrap loader (BSL) of the
ST10F269 provides a mechanism to load the
startup program through the serial interface after
reset. In this case, no external memory or internal
Flash memory is required for the initialization
code starting at location 00’0000h (see Figure 5).
The bootstrap loader moves code/data into the
internal RAM, but can also transfer data via the
serial interface into an external RAM using a
second level loader routine. Flash Memory
(internal or external) is not necess ary, but it may
be used to provide lookup tables or “core-code”
like a set of g eneral purpose subroutines for I/O
operations, number crunching, system
initiali zat io n, etc.
The bootstrap loader can be used to load the
complete application software into ROMless
systems, to load temporary software into
complete systems for testing or calibration, or to
load a programming routine for Flash devices.
The BSL mechanism can be used for standard
system startup as well as for special occasions
like system maintenance (firmer update) or
end-of-line programming or testing.
5.6.1 - Entering the Bootstrap Loader
The ST10F269 enters BSL mode whe n pin P0L. 4
is sampled low at t he end o f a hard ware reset. In
this case the built-in bootstrap loader is a ctivated
independent of the selected bus mode.
The bootstrap loader code is stored in a special
Boot-ROM. No part of the standard mask Memory
or Flash Memory area is required for this.
After entering BSL mode and the respective
initialization the ST10F269 scans the RXD0 line to
receive a zero Byte, one start bit, eight ‘0’ data bits
and one stop bit.
From the duration of this zero Byte it calculates
the corresponding Baud rate factor with respect to
the current CPU clock, initializes the serial
interface ASC0 accordingly and switches pin
TxD0 to output.
Using this Baud rate, an identification Byte is
returned to the host that provides the loaded data.
This identification Byte identifies the device to
be booted. The identification byte is D5h for
ST10F269.
Figure 5 :
Bootstrap Loader Sequence
RSTIN
P0L.4
1)
2)
RxD0
3)
TxD0
5)
CSP:IP
Internal Boot Memory (BSL) routine 32 Byte user software
6)
1) BSL initialization time
2) Zero B yt e (1 start bi t, ei ght ‘0’ data bi ts, 1 st op bit), sent by ho st .
3) Identification Byte (D5h), sent by ST10F269.
4) 32 Byte s of code / data, sent by host.
5) Cauti on: TxD0 is only driven a cert ai n time af ter reception of t h e z e ro Byte.
6) Internal Boot ROM.
4)
30/160
 Loading...
Loading...