

Product Manual
Cheetah 15K.6 FC
ST3450856FC
ST3300656FC
ST3146356FC
ST3450056FC (FDE)
ST3300056FC (FDE)
ST3146756FC (FDE)
100465943
Rev . D
August 2008

©2007, 2008, Seagate Technology LLC All rights reserved.
Publication number: 100465943, Rev. D
August 2008
Seagate, Seagate Technology and the Wave logo are registered trademarks of Seagate Technology LLC
in the United States and/or other countries. Cheetah, SeaTools and SeaTDD are either trademarks or registered trademarks of Seagate Technology LLC or one of its affiliated companies in the United States and/
or other countries. All other trademarks or registered trademarks are the property of their respective owners.
One gigabyte, or GB, equals one billion bytes when referring to hard drive capacity. Accessible capacity
may vary depending on operating environment and formatting. Quantitative usage examples for various
applications are for illustrative purposes. Actual quantities will vary based on various factors, including file
size, file format, features and application software. Seagate reserves the right to change, without notice,
product offerings or specifications.

Cheetah 15K.6 FC Product Manual, Rev. D
i
Contents
1.0 Scope. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2.0 Applicable standards and reference documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Electromagnetic compatibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 Electromagnetic compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 European Union Restriction of Hazardous Substances (RoHS) . . . . . . . . . . . . . . . . . . . . . 4
2.3 Reference documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.0 General description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Standard features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2 Media description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.3 Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.4 Reliability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.5 Formatted capacities. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.5.1 Programmable drive capacity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.6 Factory-installed options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.7 User-installed accessories. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.0 Performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1 Internal drive characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2 Seek performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2.1 Access time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2.2 Format command execution time (minutes). . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.2.3 General performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.3 Start/stop time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.4 Prefetch/multi-segmented cache control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.5 Cache operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.5.1 Caching write data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.5.2 Prefetch operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.0 Reliability specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1 Error rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.1 Recoverable Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.2 Unrecoverable Errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.3 Seek errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.1.4 Interface errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.2 Reliability and service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.2.1 Annualized Failure Rate (AFR) and Mean Time Between Failures (MTBF) . . . 16
5.2.2 Preventive maintenance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.2.3 Hot plugging the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.2.4 S.M.A.R.T. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.2.5 Thermal monitor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.2.6 Drive Self Test (DST). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.2.7 Product warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21

ii
Cheetah 15K.6 FC Product Manual, Rev. D
6.0 Physical/electrical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.1 AC power requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.2 DC power requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.2.1 Conducted noise immunity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.2.2 Power sequencing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.2.3 Current profiles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.3 Power dissipation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.4 Environmental limits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.4.1 Temperature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.4.2 Relative humidity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.4.3 Effective altitude (sea level) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.4.4 Shock and vibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.4.5 Acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.4.6 Air cleanliness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.4.7 Corrosive environment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.4.8 RoHS compliance statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.4.9 Electromagnetic susceptibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.5 Mechanical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7.0 Defect and error management. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.1 Drive internal defects/errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.2 Drive error recovery procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.3 FC-AL system errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
7.4 Background Media Scan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
7.5 Media Pre-Scan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.6 Deferred Auto-Reallocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.7 Idle Read After Write . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8.0 Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.1 Drive ID/option selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.2 Drive orientation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.3 Cooling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.4 Drive mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
8.5 Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
9.0 Interface requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
9.1 FC-AL features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
9.1.1 Fibre Channel link service frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
9.1.2 Fibre Channel task management functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
9.1.3 Fibre Channel task management responses . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
9.1.4 Fibre Channel port login. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.1.5 Fibre Channel port login accept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
9.1.6 Fibre Channel Process Login. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
9.1.7 Fibre Channel Process Login Accept. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
9.1.8 Fibre Channel fabric login. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
9.1.9 Fibre Channel fabric accept login. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
9.1.10 Fibre Channel Arbitrated Loop options. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
9.2 Dual port support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
9.3 SCSI commands supported. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
9.3.1 Inquiry data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
9.3.2 Mode Sense data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
9.4 Miscellaneous operating features and conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
9.5 FC-AL physical interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
9.5.1 Physical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
9.5.2 Connector requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
9.5.3 Electrical description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69

Cheetah 15K.6 FC Product Manual, Rev. D
iii
9.5.4 Pin descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
9.5.5 FC-AL transmitters and receivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
9.5.6 Power. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
9.5.7 Fault LED Out . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
9.5.8 Active LED Out. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
9.5.9 Enable port bypass signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
9.5.10 Motor start controls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
9.5.11 SEL_6 through SEL_0 ID lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
9.5.12 Device control codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
9.6 Signal characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
9.6.1 TTL input characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
9.6.2 LED driver signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.6.3 FC Differential output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.6.4 FC Differential input. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
10.0 Seagate Technology support services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79

iv
Cheetah 15K.6 FC Product Manual, Rev. D
Cheetah 15K.6 FC Product Manual, Rev. D
1
1.0 Scope
This manual describes Seagate Technology® LLC, Cheetah® 15K.6 FC (Fibre Channel) disc drives.
Cheetah 15K.6 FC drives support the Fibre Channel Arbitrated Loop and SCSI Fibre Channel Protocol specifi-
cations to the extent described in this manual. The Fibre Channel Interface Manual (part number 100293070)
describes the general Fibre Channel Arbitrated Loop characteristics of this and other Seagate Fibre Channel
drives. The Full Disc Encryption (FDE) Reference Manual, part number 100515636 (available Fall 2008)
describes the interface, general operation and security features available on FDE drives.
From this point on in this product manual, the reference to Cheetah 15K.6 FC models is referred to as “the
drive” unless references to individuals models are necessary.
Unless otherwise stated, the information in this manual applies to models that incorporate FDE and models
that do not incorporate FDE.
Model Number Full Disk Encryption (FDE)
ST3450856FC No
ST3300656FC No
ST3146356FC No
ST3450056FC Yes
ST3300056FC Yes
ST3146756FC Yes

2
Cheetah 15K.6 FC Product Manual, Rev. D

Cheetah 15K.6 FC Product Manual, Rev. D
3
2.0 Applicable standards and reference documentation
The drive has been d evelope d as a system p eriphe ral to the hig hest st and ards of desig n and constru c tion. The
drive depends upon its host equipment to provide adequate power and environment in order to achieve optimum performance and compliance with applicable industry and governmental regulations. Special attention
must be given in the areas of safety, power distribution, shielding, audi ble noise con trol , an d tempe ratu re reg ulation. In particular, the drive must be securely mounted in order to guarantee the specified performance characteristics. Mounting by bottom holes must meet the requirements of Section 8.4.
2.1 Standards
The Cheetah 15K.6 FC family complies with Seagate standards as noted in the appropriate sections of this
manual and the Seagate Fibre Channel Interface Manual, part number 100293070.
The Cheetah 15K.6 FC disc drive is a UL recognized component per UL1950, CSA certified to CAN/CSA
C22.2 No. 950-95, and VDE certified to VDE 0805 and EN60950.
The security features of Cheetah 15K.6 FC FDE models are based on the “TCG Storage Architecture Core
Specification” and the “TCG Storage Workgroup Security Subsystem Classs: Enterprise_A” specification with
additional vendor-unique features as noted in this product manual.
2.1.1 Electromagnetic compatibility
The drive, as delivered, is designed for system integration and installation into a suitable enclosure prior to
use. As such the drive is supplied as a subassembly and is not subject to Subpart B of Part 15 of the FCC
Rules and Regulations nor the Radio Interference Regulations of the Canadian Department of Communications.
The design characteristics of the drive serve to minimize radiation when installed in an enclosure that provides
reasonable shield ing. As such, t he dr ive is cap able of me eting th e C lass B l imit s of the FC C Rules a nd R eg ulations of the Canadian Department of Communications when properly packaged. However, it is the user’s
responsibility to assure that the drive meets the appropriate EMI requirements in their system. Shielded I/O
cables may be required if the enclosure does not provide adequate shielding. If the I/O cables are external to
the enclosure, shielded cabl es sh ould be u sed, wi th the shields gr ounde d to the enclosur e and to the host co ntroller.
2.1.1.1 Electromagn etic susc ept ibili ty
As a component assembly, the drive is not required to meet any susceptibility performance requirements. It is
the responsibility of those integrating the drive within their systems to perform those tests required and design
their system to ensure that equipment operating in the same system as the drive or external to the system
does not adversely affect the performance of the drive. See Table 2, DC power requirements.

4
Cheetah 15K.6 FC Product Manual, Rev. D
2.1.2 Electromagn etic complia nce
Seagate uses an independent laboratory to confirm compliance with the directives/standards for CE Marking
and C-Tick Marking. T he dr ive was tested in a r epre sent ative system for typica l applications. The select ed system represents the most popular characteristics for test platforms. The system configurations include:
• Typical current use microprocessor
• Keyboard
• Monitor/display
• Printer
• Mouse
Although the test system with th is Seag ate mo del comp lies with the dir ectives/st and ards, we cannot gu aran tee
that all systems will comply. The computer manufacturer or system integrator shall confirm EMC compliance
and provide the appropriate marking for their product.
Electromagnetic compliance for the European Union
If this model has the CE Marking it complies with the European Union requirements of the Electromagnetic
Compatibility Directive 89/336/EEC of 03 May 1989 as amended by Directive 92/31/EEC of 28 April 1992 and
Directive 93/68/EEC of 22 July 1993.
Australian C-Tick
If this model has the C-Tick Marking it complies with the Australia/New Zealand Standard AS/NZS3548 1995
and meets the Electromagnetic Compatibility (EMC) Framework requirements of Australia’s Spectrum Management Agency (SMA).
Korean MIC
If this model has the Korean Min ist ry of Infor mat ion and Com munication (MIC) logo, it complie s with par agr aph
1 of Article 11 of the Electromagnetic Compatibility (EMC) Control Regulation and meets the Electromagnetic
Compatibility Framework requirements of the Radio Research Laboratory (RRL) Ministry of Information and
Communication Republic of Korea.
This drive has been tested and complies with the Electromagnetic Interference/Electromagnetic Susceptibiliity
(EMI/EMS) for Class B products.
Taiwanese BSMI
If this model has the Chin ese N ation al Standard (CNS) 13438 marking, it co mplies w ith Chi n ese Nationa l Standard (CNS) 13438 and meets the Electromagnetic Compatibility (EMC) Framework requirements of the Taiwanese Bureau of Standards, Metrology, and Inspection (BSMI).
2.2 European Uni on Restric tion of Hazardous Substances (RoHS)
The European U nion Restr icti on of Hazard ous S ubst ance s (RoHS ) Dire cti ve re strict s the p resen ce of ch emic al
substances, including Lead (Pb), in electronic products effective July 2006.
A number of parts and materials in Seagate products are procured from external suppliers. We rely on the representations of our suppliers regarding the presence of RoHS substances in these parts and materials. Our
supplier contracts require compliance with our chemical substance restrictions, and our suppliers document
their compliance wi th our re quire ment s by providing material conte nt declar ations for al l par ts an d mater ial s for
the disc drives documented in this publication. Current supplier declarations include disclosure of the inclusion
of any RoHS-regulated substance in such parts or materials.
Seagate also has internal system s in place to en sure ongoing complian ce with the RoHS Directive and all laws
and regulations which restrict chemical conte nt in electron ic produ cts. T hese system s include sta ndar d operating procedures that ensure that restricted substances are not utilized in our manufacturing operations, labora-
Cheetah 15K.6 FC Product Manual, Rev. D
5
tory analytical validation testing, and an internal auditing process to ensure that all standard operating
procedures are complied with.
2.3 Reference documents
ANSI Fibre Channel Documents
X3.230-1994 FC Physical and Signaling Interface (FC-PH)
X3.297.1997 FC-PH-2 Fibre Channel Physical and Signaling Interface-2
X3.303.1998 FC-PH-3 Fibre Channel Physical and Signaling Interface-3
X3.272-1996 FC Arbitrated Loop (FC-AL)
X3.269-1996 Fibre Channel Protocol for SCSI (FCP)
NCITS TR-19 Private Loop SCSI Direct Attach (PLDA)
NCITS TR-20 Fabric Loop Attachment (FC-FLA)
SFF-8045 Specification for 40-pin SCA-2 Connector with Parallel Selection
SFF-8067 Specification for 40-pin SCA-2 Connector with Bidirectional
Enclosure Services Interface
ANSI Small Computer System Interface (SCSI) Documents
X3.131-1994 (SCSI-2)
X3.270-1996 (SCSI-3) Architecture Model
NCITS 305-199X (SCSI-3) Enclosure Services
Trusted Computing Group (TCG) Documents (apply to FDE models only)
TCG Core Specification, version 0.9
TCG SSC Specification (draft)
Specification for Acoustic Test Requirement and Procedures
Seagate part number: 30553-001
Package Test Specification Seagate P/N 30190-001 (under 100 lb.)
Package Test Specification Seagate P/N 30191-001 (over 100 lb.)
In case of conflict between this document and any referenced document, this document takes precedence.

6
Cheetah 15K.6 FC Product Manual, Rev. D
Cheetah 15K.6 FC Product Manual, Rev. D
7
3.0 General description
Cheetah 15K.6 FC drive s provide high performan c e, high cap acity dat a stor age for a variety of systems including engineering workstations, network servers, mainframes, and supercomputers. Cheetah 15K.6 FC drives
support 4-Gbit Fibre Channel.
Cheetah 15K.6 FC drives support the Fibre Channel Arbitrated Loop (FC-AL) and SCSI Fibre Channel Protocol as described in the ANSI specifications, this document, and the Fibre Channel Interface Manual which
describes the general interface characteristics of this drive. Cheetah 15K.6 FC drives are classified as intelligent peripherals and provide level 2 conformance (highest level) with the ANSI SCSI-1 standard.
Cheetah 15K.6 FC FDE models have provisions for “Security of Data at Rest” based on the standards defined
by the Trusted Computing Group (see www.trustedcomputinggroup.org).
Never disassemble the HDA and do not attempt to service items in the sealed enclosure (heads, media, actuator, etc.) as this requires special facilities. The drive does not contain user-replaceable parts. Opening the
HDA for any reason voids your warranty.
Cheetah 15K.6 FC drives use a dedicated landing zone at the innermost radius of the media to eliminate the
possibility of destroying or degrading data by landing in the data zone. The heads automatically go to the landing zone when power is removed from the drive.
An automatic shipping lock prevents potential damage to the heads and discs that results from movement during shipping and handling. The shipping lock disengages and the head load process begins when power is
applied to the drive.
The drives also use a high-performance actuator assembly with a low-inertia, balanced, patented, straight arm
design that provides excellent performance with minimal power dissipation.

8
Cheetah 15K.6 FC Product Manual, Rev. D
3.1 Standard featu re s
Cheetah 15K.6 FC drives have the following standard features:
• 4-Gbit Fibre Channel interfac e
• Integrated dual port FC-AL controller
• Concurrent dual port transfers
• Support for FC arbitrated loop, private and public attachment
• Differential copper FC drivers and receivers
• Downloadable firmware using the FC-AL interface
• Supports SCSI enclosure services via interface connector
• 128-deep task set (queue)
• Supports up to 32 initiators
• Drive selection ID and configuration options are set on the FC-AL backpanel or through interface commands. Jumpers are not used on the drive.
• Supports SCSI Enclosure Services through the interface connector
• Fibre Channel worldwide name uniquely identifies the drive and each port
• User-selectable logical block size (512, 520, 524, or 528 bytes per logical block)
• Selectable frame sizes from 256 to 2,112 bytes
• Industry standard 3.5-inch low profile form factor dimensions
• Programmable logical block reallocation scheme
• Flawed logical block reallocation at format time
• Programmable auto write and read reallocation
• Reed-Solomon error correction code
• Sealed head and disc assembly (HDA)
• No preventive maintenance or adjustments required
• Dedicated head landing zone
• Automatic shipping lock
• Embedded Grey Code track address to eliminate seek errors
• Self-diagnostics performed at power on
• Zone bit recording (ZBR)
• Vertical, horizontal, or top down mounting
• Dynamic spindle b rake
• 16,384 Kbyte data buffer (see Section 4.5)
• Embedded servo design
• Reallocation of defects on command (Post Format)
• Fibre Channel interface transpor ts SCSI protocol
Cheetah 15K.6 FC FDE models have the following additional features :
• Automatic data encryption/decryption on all write and reads to and from the media
• Cryptographic erase of user data for a drive that will be repurposed or scrapped
• Two independent data bands which each have it’s own ownership credential and encryption key
• Authenticated firmware download
Cheetah 15K.6 FC Product Manual, Rev. D
9
3.2 Media desc ription
The media used on the drive has an aluminum substrate coated with a thin film magnetic material, overcoated
with a proprietary protective layer for improved durability and environmental protection.
3.3 Performance
• Programmable multi-segmentable cache buffer
• 400 Mbytes/sec maximum instantaneous data transfers per port
• 15k RPM spindle; average latency = 2.0 msec
• Command queuing of up to 128 commands
• Background processing of queue
• Supports start and stop commands (spindle stops spinning)
• Adaptive seek velocity; improved seek performance
Note. There is no significant performance difference between FDE and non-FDE models
3.4 Reliability
• Annualized Failure Rate (AFR) of 0.55%
• Increased LSI circuitry integration
• Self-Monitoring Analysis and Reporting Technology (S.M.A.R.T.)
• Dithering
• 5-year warranty
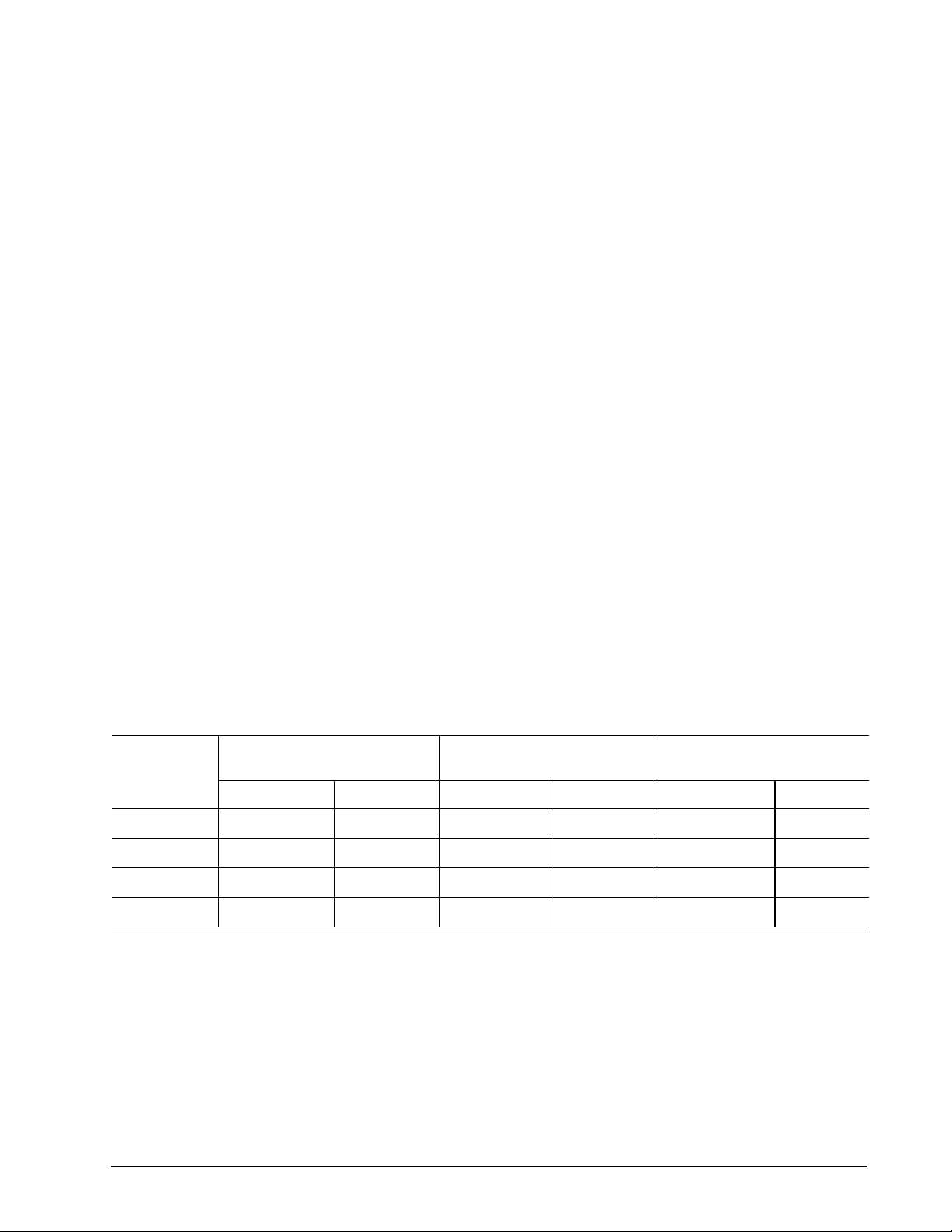
3.5 Formatted ca pacities
Standard OEM models are formatted to 512 bytes per block. The block size is selectable at format time and
must be one of the supported sizes listed in the table below.
Seagate designs specify capacity points at certain block sizes that Seagate guarantees current and future
products will meet. We recommend customers use this capacity in their project planning, as it ensures a stable
operating point with backwar d a nd fo rwar d com p atibility fr om gene ration to generation. The cur ren t gua rant eed
operating points for this product are:
ST3450856FC
ST3450056FC
Sector Size
Decimal Hex Decimal Hex Decimal Hex
512 879,097,968 3465F870 585,937,500 22ECB25C 286,749,488 11177330
520 860,480,771 3349E503 573,653,848 22314358 280,790,185 10BC84A9
524 849,011,700 329AE3F4 566,007,800 21BC97F8 275,154,368 106685C0
528 836,812,167 31E0BD87 557,874,778 21407E5A 272,662,935 10408197
3.5.1 Programmable drive capacity
Using the Mode Select command, the drive can change its capacity to something less than maximum. See the
Mode Select Parameter List table in the SCSI Commands Refere nce Manu al . Re fer to the Param eter list block
descriptor number of blocks field. A value of zero in the number of blocks field indicates that the drive shall not
change the capacity it is currently formatted to have. A number in the number of blocks field that is less than
the maximum number of LBAs changes the total drive capacity to the value in the block descriptor number of
blocks field. A value greater than the maximum number of LBAs is rounded down to the maximum capacity.
ST3300656FC
ST3300056FC
ST3146356FC
ST3146756FC

10
Cheetah 15K.6 FC Product Manual, Rev. D
3.6 Factory-installed options
Yo u may order the following items which are incorporated at the manufacturing facility d uring production or
packaged before shipping. Some of the options available are (not an exhaustive list of possible options):
• Other capacities can be ordered depending on sparing scheme and sector size requested.
• Single-unit shipping pack. The drive is normally shipped in bulk packaging to provide maximum protection
against transit damage. U nit s shipped individually require add itional pro tection as pr ovided by th e singl e unit
shipping pack. Users planning single unit distribution should specify this option.
• The Safety and Regulatory Agency Specifications, part number 75789512, is usually included with each
standard OEM drive shipped, but extra copies may be ordered.
3.7 User-ins talle d accessorie s
The following accessories are available. All kits may be installed in the field.
• Evaluation kit, part number 73473641.
This kit provides an adapter card (“T-card”) to allow cable connections for two FC ports and DC power.
• Single-unit shipping pack.
Cheetah 15K.6 FC Product Manual, Rev. D
11
4.0 Performance characteristics
This section provides detailed information concerning performance-related characteristics and features of
Cheetah 15K.6 FC drives.
4.1 Internal drive characteristics
ST3450856FC ST3300656FC ST3146356FC
ST3450056FC ST3300056FC ST3146756FC
Drive capacity* 450 300 146 Gbytes (formatted, rounded off value)
Read/write data heads 8 6 3
Tracks per inch 150,000 150,000 150,000 TPI
Peak bits per inch 1,100k 1,100k 1,100k BPI
Areal density 165 165 165 Gbits/inch
Internal data rate 1.95 1.95 1.95 Gbits/sec ( ma x)
Disc rotation speed 15k 15k 15k rpm
Avg rotational latency 2.0 2.0 2.0 msec
*One Gbyte equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary depending on operating environment
and formatting.
4.2 Seek performance ch aracteristics
See Section 9.5, "FC-AL physical interface" on page 68 and the Fibre Channel Interface Manual (part number
77767496) for additional timing details.
2
4.2.1 Access time
Not including controller overhead
Read Write
Average Typical 3.4 3.9
Single track Typical 0.20 0.44
Full stro ke Typical 6.6 7.4
1. Typical access times are measured under nominal conditions of temperature, voltage,
and horizontal orientation as measured on a representative sample of drives.
2. Access to data = access time + laten cy time.
1,2
(msec)

12
Cheetah 15K.6 FC Product Manual, Rev. D
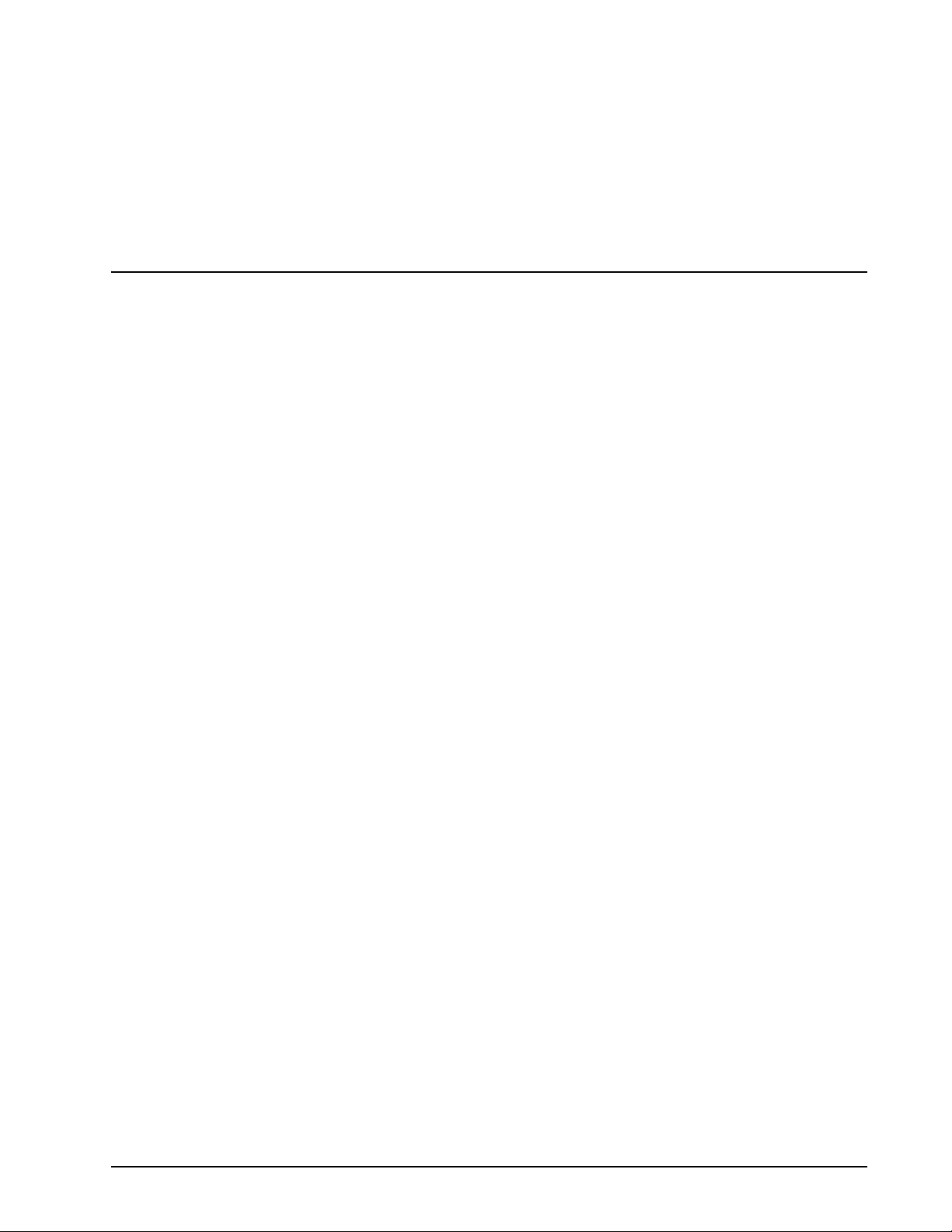
4.2.2 Format command execution time (minutes)
When changing sector sizes, the format times shown below may need to be increased by 30 minutes.
Maximum (wi th verify)
Maximum (without verify)
ST3450856FC
ST3450056FC
176 144 100
88 72 50
ST3300656FC
ST3300056FC
ST3146356FC
ST3146756FC
Note. There is no si gnificant di f fer ence in the format time betw een FD E and non- FD E mod el s of the sa me
capacity.
4.2.3 General performance characteristics
Sustainable disc transfer rate*:
Minimum 112 Mbytes/sec (typical)
Maximum 171 Mbytes/sec (typical)
Fibre Channel Interface maximum instantaneous transfer rate 400 Mbytes/sec* per port
Logical block sizes
Default is 512-byte data blocks
Sector sizes variable to 512, 520, 524 and 528 bytes.
Read/write consecutive sectors on a track Yes
Flaw reallocation performance impact (for flaws reallocated at f ormat time
using the spare sectors per sparing zone reallocation scheme.)
Average rotational latency 2.0 msec
*Assumes no errors and no relocated logical blocks.
Rate measured from the start of the first logical block transfer to or from the host.
1MB/sec = 1,000,000 bytes/sec
Negligible
4.3 Start/stop time
If the Motor Start option is disabled, the drive becomes ready within 20 seconds after DC power is applied. If a
recoverable error conditio n i s detect ed dur ing the sta rt seq uence, the dr i ve execu tes a re cover y proce dure and
the time to become ready may exceed 20 seconds. During spin up to ready time, the drive responds to some
commands over the FC interface in less than 3 seconds after application of power. Stop time is 30 seconds
(maximum) from removal of DC power.
If the Motor Start option is enabled, the internal controller accepts the commands listed in the Fibre Channel
Interface Manual less than 3 seconds after DC power has been applied. After the Motor Start command has
been received, the drive becomes ready for normal operations within 20 second s (excluding the err or reco very
procedure). The Motor Start command can also be used to command the drive to stop the spindle.
There is no power control switch on the drive.

Cheetah 15K.6 FC Product Manual, Rev. D
13
4.4 Prefetch /m ulti-segmen te d cache contro l
The drive provides a prefetch (read look-ahead) and multi-segmented cache control algorithms that in many
cases can enhance system performance. Cache refers to the drive buffer storage space when it is used in
cache operations. To select this feature, the host sends the Mode Select command with the proper values in
the applicable bytes in page 08h. Prefetch and cache operations are independent features from the standpoint
that each is enabled and disabled independently using the Mode Select command; however, in actual operation, the prefetch feature overlaps cache operation somewhat as described in sections 4.5.1 and 4.5.2.
All default cache and prefetch mode parameter values (Mode Page 08h) for standard OEM versions of this
drive family are given in Table 21.
4.5 Cache operation
Note. Refer to the Fibre Ch anne l Interface Manual for more detail concerning the cache bits.
Of the 16 Mbytes physical buffer sp ace i n the drive, approxim atel y 13,0 00 kbytes can be used as a cache. The
buffer is divided into logical segments from which data is read and to which data is written.
The drive keeps track of the logical block addresses of the data stored in each segment of the buffer. If the
cache is enabled (see RCD bit in the FC Interface Manual ), data requested by the host with a read command
is retrieved from the buf fe r, if possible, before any disc access is initiated . If cach e oper ation is not en abled, the
buffer is still used, but only as circular buffer segments during disc medium read operations (disregarding
Prefetch operation for the moment). That is, the drive does not check in the buffer segments for the requested
read data, but goes directly to the medium to retrieve i t. The retrieved data merely passes through some buf fer
segment on the way to the host. All data transfers to the host are in accordance with buffer-full ratio rules. See
the explanation p rovide d with th e i nfor matio n abo ut Mo de P age 02h ( disconne ct/reconnect control) in th e Fibre
Channel Interface Manual.
The following is a simplified description of the prefetch/cache operation:
Case A—read command is received and all of the requested logical blocks are already in the cache:
1. Drive transfers the requested logical blocks to the initiator.
Case B—A Read command requests data, and at least one requested logical block is not in any segment of
the cache:
1. The drive fetches the requested logical blocks from the disc and transfers them into a segment, and then
from there to the host in accordance with the Mode Select Disconnect/Reconnect parameters, page 02h.
2. If the prefetch feature is enabled, refer to section 4.5.2 for operation from this point.
Each cache segment is actually a self-contained circular buffer whose length is an integer number of logical
blocks. The drive dynamically creates and removes segments based on the workload. The wrap-around capability of the individual segments greatly enhances the cache’s overall performance.
Note. The size of each segment is not reported by Mode Sense command page 08h, bytes 14 and 15.
The value 0XFFFF is always reported regardless of the actual size of the segment. Sending a size
specification using the Mode Select command (bytes 14 and 15) does not set up a new segment
size. If the STRICT bit in Mode page 00h (byte 2, bit 1) is set to one, the drive responds as it does
for any attempt to change an unchangeable parameter.
4.5.1 Caching write data
Write caching is a write operation by the drive that makes use of a drive buffer storage area where the data to
be written to the medium is stored while the drive performs the Write command.
If read caching is enabled (RCD=0), then data written to the medium is retained in the cache to be made available for future read cache hits. The same buffer space and segmentation is used as set up for read functions.
The buffer segmentation scheme is set up or changed independently, having nothing to do with the state of
RCD. When a write command is issued, if RCD=0, the cache is first checked to see if any logical blocks that

14
Cheetah 15K.6 FC Product Manual, Rev. D
are to be written are already stored in the cache from a previous read or write command. If there are, the
respective cache segments are cleared. The new data is cached for subsequent Read commands.
If the number of write dat a logical blo cks excee d the size o f the segm ent b eing wr itten into, wh en th e en d of the
segment is reached, the data is written i nto the b eginning of the same cache segment, overwriting the dat a that
was written there at the beginning of the operation; however, the drive does not overwrite data that has not yet
been written to the medium.
If write caching is enabled (WCE=1), then the drive may return Good status on a write command after the data
has been transferred into the cache, but before the data has been written to the medium. If an error occurs
while writing the data to the medium, and Good status has already been returned, a deferred error will be generated.
The Synchronize Ca che command may be used to force the drive to write all cached wri te dat a to the med ium.
Upon completion of a Synchronize Cache command, all data received from previous write commands will have
been written to the medium.
Table 21 shows the mode default settings for the drive.
4.5.2 Prefetch operation
If the Prefetch feature is enabled, data in contiguous logical blocks on the disc immediately beyond that which
was requested by a Read command are retrieved and stored in the buffer for immediate transfer from the
buffer to the host on subsequent Read commands that request those logical blocks (this is true even if cache
operation is disabled). Though the prefetch operation uses the buffer as a cache, finding the requested data in
the buffer is a prefetch hit, not a cache operation hit.
To enable Prefetch, use Mode Select page 08h, byte 12, bit 5 (Disable Read Ahead - DRA bit). DRA bit = 0
enables prefetch.
The drive does not use the Max Prefetch field (bytes 8 and 9) or the Prefetch Ceiling field (bytes 10 and 11).
When prefetch (read look-ahead) is enabled (enabled by DRA = 0), the drive enables prefetch of contiguous
blocks from the disc when it senses that a prefetch hit will likely occur. The drive disables prefetch when it
decides that a prefetch hit is not likely to occur.

Cheetah 15K.6 FC Product Manual, Rev. D
15
5.0 Reliability specifications
The following reliability specifications assume correct host and drive operational interface, including all interface timings, power supply voltages, environmental requirements and drive mounting constraints.
Seek error rate:
Read Error Rates
Recovered Data
Unrecovered Data
Miscorrected Data
Interface error rate:
Annualized Failure Rate (AFR): 0.55%
Preventive maintenance: None required
5.1 Error rates
The error rates stated in this manual assume the following:
• The drive is operated in accordance with this manual using DC power as defined in paragraph 6.2, "DC
power requirements."
• Errors caused by host system failures are excluded from error rate computations.
• Assume random data.
• Default OEM error recovery settings are applied. This includes AWRE, ARRE, full read retries, full write
retries and full retry time.
• Error rate specified with automatic retries and data correction with ECC enabled and all flaws reallocated.
Less than 10 errors in 108 seeks
Less than 10 errors in 1012 bits transferred (OEM default settings)
Less than 1 sector in 1016 bits transferred
Less than 1 sector in 1021 bits transferred
Less than 1 error in 1012 bits transferred with minimum receive eye.
Less than 1 error in 1014 bits transferred with typical receive eye.
See Section 9.6.4, "FC Differential input." on page 76
5.1.1 Recoverable Errors
Recovereable errors are those detected and corrected by the drive, and do not require user intervention.
Recoverable Data errors use retries and correction. Application of ECC on-the-fly correction alone is not con-
sidered a Recovered Data error.
Recovered Data error rate is determined using read bits transferred for recoverable errors occurring during a
read, and using write bits transferred for recoverable errors occurring during a write.
5.1.2 Unrecoverable Errors
Unrecoverable Data Errors (Sense Key = 03h) are specified at less than 1 sector in error per 1016 bits transferred. Unrecoverable Data Errors resulting from the same cause are treated as 1 error for that block.

16
Cheetah 15K.6 FC Product Manual, Rev. D
5.1.3 Seek errors
A seek error is defined as a failure of the drive to position the heads to the addressed track. After detecting an
initial seek error, the drive automaticall y perf orms an error recovery process. If the error recover y process fails,
a seek positioning error (Error code = 15h or 02h) will be reported with a Hardware error (04h) in the Sense
Key. Recoverable seek errors are specified at Less than 10 errors in 108 seeks. Unrecoverable seek errors
(Sense Key = 04h) are classified as drive failures.
5.1.4 Interface errors
An interface error is defined as a failure of the receiver on a port to recover the data as transmitted by the
device port connected to the receiver. The error may be detected as a running disparity error, illegal code, loss
of word sync, or CRC error. The total error rate for a loop of devices is the sum of the individual device error
rates.
5.2 Reli ab ilit y and servi ce
You can enhance the reliability of Cheeta h 15K .6 d isc dri ves by ensu ring t hat th e dri ve receive s adeq uate cooling. Section 6.0 provides temperature measurements and other information that may be used to enhance the
service life of the drive. Section 8.2 provides recommended air-flow information.
5.2.1 Annualized Failure Rate (AFR) and Mean Time Between Failures (MTBF)
These drives shal l ach ieve an A FR of 0.55 % ( MTBF of 1,600,000 hours) w he n op erate d in an en vi ronm ent that
ensures the HDA case temperatures do not exceed the values specified in Section 6.4.1.
Operation at case temperatures outside the specifications in Section 6.4.1 may increase the AFR (decrease
the MTBF). AFR and MTBF statistics are poplulation statistics that are not relevant to individual units.
AFR and MTBF specifications are based on the following assumptions for Enterprise Storage System environments:
• 8,760 power-on hours per year
• 250 average on/off cycles per year
• Operating at nominal voltages
• System provides adequate cooling to ensure the case temperatures specified in Section 6.4.1 are not
exceeded.
5.2.2 Preventive mainte nan ce
No routine scheduled preventive maintenance is required.
5.2.3 Hot plugging the drive
Inserting and removing the drive on the FC-AL will interrupt loop operation. The interruption occurs when the
receiver of the next device in the loop must synchronize to a different input signal. FC error detection mechanisms, character sync, running disp a rity, word sync, and CRC are able to detect any error. Recovery is initiated
based on the type of error.
The disc drive defaults to the FC-AL Monitoring state, Pass-through state, when it is powered-on by switching
the power or hot plugged. The control line to an optional port bypass circuit (external to the drive), defaults to
the Enable Bypass state. If the bypass circuit is present, the next device in the loop will continue to receive the
output of the previous device to the newly inserted device. If the bypass circuit is not present, loop operation is
temporarily disrupted until the next device starts receiving the output from the newly inserted device and
regains synchronization to the new input.
The Pass-through state is disabled while the drive perfo rms self test of the FC interface. The control line for an
external port bypass circuit remains in the Enable Bypass state while self test is running. If the bypass circuit is

Cheetah 15K.6 FC Product Manual, Rev. D
17
present, loop oper ation m ay con tinue. If the byp ass circ uit is not pres ent, loo p ope ration will be h alted while the
self test of the FC interface runs.
When the self test completes successfully, the control line to the bypass circuit is disabled and the drive enters
the FC-AL Initializing st a te. The receiver on the ne xt device i n the loo p must synch ronize t o outpu t of the newly
inserted drive.
If the self-test fails, the control line to the bypass circuit remains in the Enable Bypass state.
Note. It is the responsibility of the systems integrator to assure that no temperature, energy, voltage haz-
ard, or ESD potential hazard is presented during the hot connect/disconnect operation. Discharge
the static electricity from the drive carrier prior to inserting it into the system.
Caution. The drive motor must come to a complete s t op pri or to ch anging the pl a ne of o pera tion. T his time is
required to insure data integrity.
5.2.4 S.M.A.R.T.
S.M.A.R.T. is an acronym for Self-Monitoring Analysis and Reporting Technology. This technology is intended
to recognize conditions that indicate imminent drive failure and is designed to provide sufficient warning of a
failure to allow you to back up the data before an actual failure occurs.
Note. The drive’ s f irmwar e moni tor s specific attr ibutes for degr adatio n ove r tim e b ut can ’ t predi ct in sta nt a-
neous drive failures.
Each monitored attribute has been selected to monitor a specific set of failure conditions in the operating performance of the drive and the thresholds are optimized to minimize “false” and “failed” predi ctions.
Controlling S.M.A.R.T.
The operating mode of S.M.A.R. T. is controlled by the DEXCPT and PERF bits on the Informational Exce ptions
Control mode page (1Ch). Use the DEXCPT bit to enable or disable the S.M.A.R.T. feature. Setting the DEXCPT bit disables all S.M.A.R.T. functions. When enab led, S .M. A.R.T. collects on -line d ata as the drive p erfor ms
normal read and write operations. When the PERF bit is set, the drive is considered to be in “On-line Mode
Only” and will not perform off-line functions.
You can measure off-line attributes and force the drive to save the data by using the Rezero Unit command.
Forcing S.M.A.R.T. resets the timer so that the next scheduled interrupt is in two hours.
You can interrogate the drive through th e host t o dete rmine the time remaining b efore the ne xt schedu l ed me asurement and d at a logg i ng p rocess occur s . To accomplish this, i ssue a Log Sense command to log page 0x3E.
This allows you to control when S.M.A.R.T. interruptions occur. Forcing S.M.A.R.T. with the RTZ command
resets the timer.
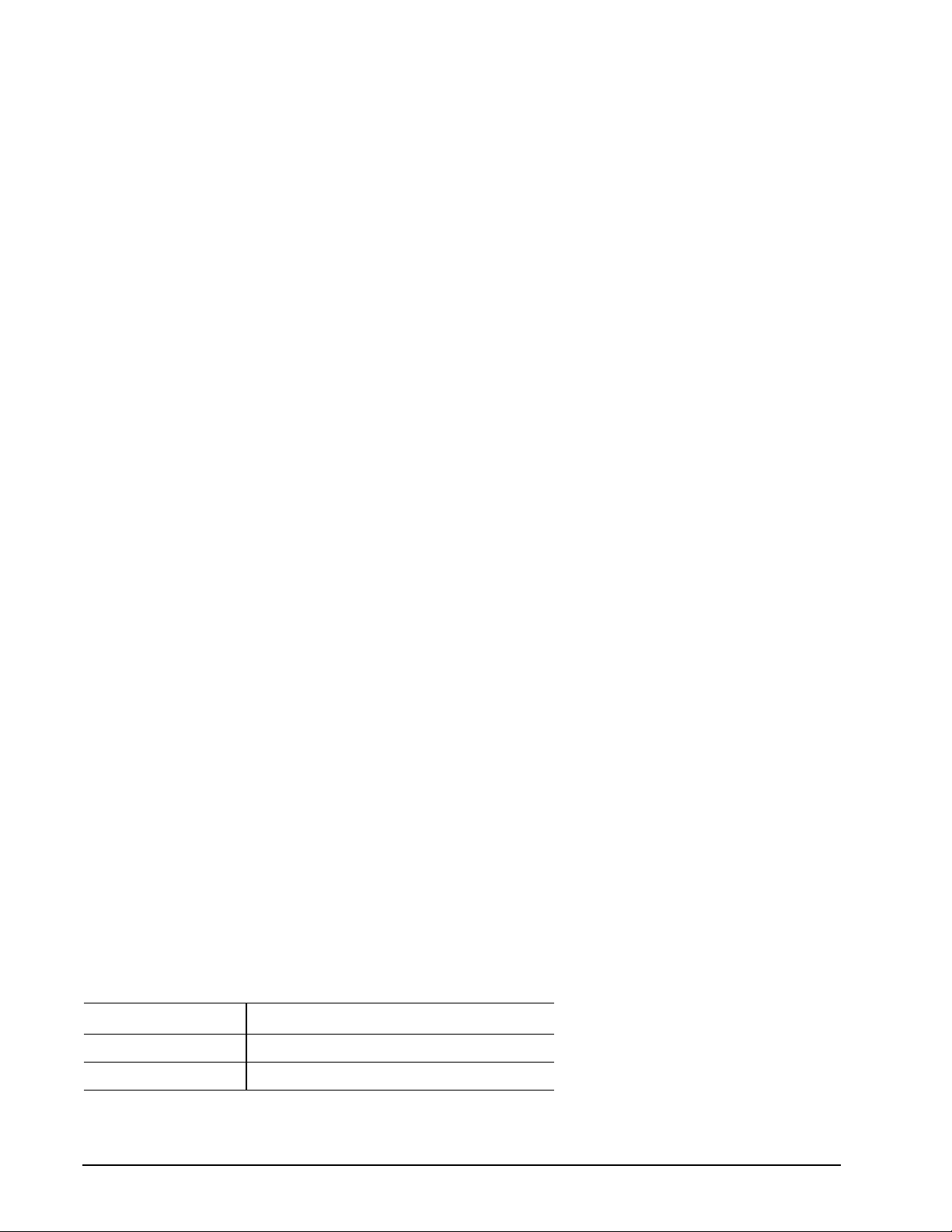
Performance impact
S.M.A.R.T. attribute data is saved to the disc so that the events that caused a predictive failure can be recreated. The drive measures and saves parameters once every two hours subject to an idle period on the FC-AL
bus. The process of measuring off-line attribute data and saving data to the disc is uninterruptable. The maximum on-line only processing delay is summarized below:
Maximum processing delay
On-line only delay
DEXCPT = 0, PERF = 1
Fully-enabled delay
DEXCP T = 0, PE R F = 0
S.M.A.R.T. delay times
Reporting control
Reporting is controlled by the MRIE bits in the Informational Exceptions Control mode page (1Ch). Subject to
the reporting method, the firmware will issue to the host an 01-5Dxx sense code. The error code is preserved
through bus resets and power cycles.
42 milliseconds
163 milliseconds
18
Cheetah 15K.6 FC Product Manual, Rev. D
Determining rate
S.M.A.R.T. monitors the rate at which errors occur and si gna ls a predi ctive fai lure if the rat e of degrad ed err ors
increases to an unacceptabl e level. To determine rate, error events are logged and com pa red to the num ber of
total operations for a given attribute. The interval defines the number of operations over which to measure the
rate. The counter that keeps track of the current number of operations is referred to as the Interval Counter.
S.M.A.R.T. measures error rates. All errors for each monitored attribute are recorded. A counter keeps track of
the number of errors for the current interval. This counter is referred to as the Failure Counter.
Error rate is the number of errors per oper ation. The algori thm tha t S .M.A.R .T. uses to record rate s of err or i s to
set thresholds for the number of errors and their interval. If the number of errors exceeds the threshold before
the interval expires, the error rate is considered to be unacceptable. If the number of errors does not exceed
the threshold before the interval expires, the error rate is considered to be acceptable. In either case, the interval and failure counters are reset and the process starts over.
Predictive failures
S.M.A.R.T. signals predictive failures when the drive is performing unacceptably for a period of time. The firmware keeps a running count of the number of times the error rate for each attribute is unacceptable. To accomplish this, a counter is incremented each time the error rate is unacceptable and decremented (not to exceed
zero) whenever the error rate is acceptable. If the counter continually increments such that it reaches the predictive threshold, a predictive failure is signaled. This counter is referred to as the Failure History Counter.
There is a separate Failure History Counter for each attribute.
5.2.5 Thermal monitor
Cheetah 15K.6 FC drives implement a temperature warning system which:
1. Signals the host if the temperature exceeds a value which would threaten the drive.
2. Signals the host if the temperature exceeds a user-specified value.
3. Saves a S.M.A.R.T. data frame on the drive which exceeds the threatening temperature value.
A temperature sensor monitors the drive temperature and issues a warning over the interface when the temperature exceeds a set threshold. The temperature is measured at power-up and then at ten-minute intervals
after power-up.
The thermal monitor system generates a warning code of 01-0B01 when the temperature exceeds the specified limit in compliance with the SCSI standard. The drive temperature is reported in the FRU code field of
mode sense dat a. You can use this infor matio n to deter mine if the warning i s due to t he tem per atur e excee ding
the drive threatening temperature or the user-specified temperature.
This feature is controlled by the En able W a rni ng (EWasc) bit, and the reporting mechanism is controlled by the
Method of Reporting Informational Exceptions field (MRIE) on the Informational Exceptions Control (IEC)
mode page (1Ch).
The current algorithm implements two temperature trip points. The first trip point is set at 68°C which is the
maximum temperature limit according to the drive specification. The second trip point is user-selectable using
the Log Select command. The re feren ce tempe ratur e p aram eter in the tempera ture log page (see Table 1) can
be used to set this trip point. The default value for this drive is 68°C, however, you can set it to any value in the
range of 0 to 68°C. If you specify a temperature greater than 68°C in this field, the temperature is rounded
down to 68°C. A sense code is sent to the host to indicate the rounding of the parameter field.
T ab le 1: Temperature Log Page (0Dh)
Parameter Code Description
0000h
0001h
Primary Temperature
Reference Temperature
Cheetah 15K.6 FC Product Manual, Rev. D
19
5.2.6 Drive Self Test (DST)
Drive Self Test (DST) is a technology designed to recognize drive fault conditions that qualify the drive as a
failed unit. DST validates the functionality of the drive at a system level.
There are two test coverage options implemented in DST:
1. Extended test
2. Short text
The most thorough option is the extended test that performs various tests on the drive and scans every logical
block address (LBA) of the drive. The short test is time-restricted and limited in length—it does not scan the
entire media surface, but does some fundamental tests and scans portions of the media.
If DST encounters an error during either of these tests, it reports a fault condition. If the drive fails the test,
remove it from service and return it to Seagate for service.
5.2.6.1 DST failure definition
The drive will present a “diagnostic failed” condition through the self-tests results value of the diagnostic log
page if a functional failure is encountered during DST. The channel and servo parameters are not modified to
test the drive more stringently, and the number of retries are not reduced. All retries and recovery processes
are enabled during the test. If data is recoverable, no fa ilure condition will be reported regardless of the number
of retries required to recover the data.
The following conditions are considered DST failure conditions:
• Seek error after retries are exhausted
• Track-follow error after retries are exhausted
• Read error after retries are exhausted
• Write error after retries are exhausted
Recovered errors will not be reported as diagnostic failures.
5.2.6.2 Implementation
This section provides all of the information necessary to implement the DST function on this drive.
5.2.6.2.1 State of the drive prior to testing
The drive must be in a ready state before issuing the Send Diagnostic command. There are multiple reasons
why a drive may not be ready, some of which are valid conditio ns, and not erro rs. For example, a drive may be
in process of doing a form at, or anothe r D ST. It is the responsibility o f the ho st applic atio n to det erm ine the “ not
ready” cause.
While not technically part of DST, a Not Ready condition also qualifies the drive to be returned to Seagate as a
failed drive.
A Drive Not Ready condition is reported by the drive under the following conditions:
• Motor will not spin
• Motor will not lock to speed
• Servo will not lock on track
• Drive cannot read configuration tables from the disc
In these conditions, the drive responds to a Test Unit Ready command with an 02/04/00 or 02/04/03 code.
5.2.6.2.2 Invoking DST
To invoke DST, submit the Send Diagnostic command with the appropriate Function Code (001b for the short
test or 010b for the extended test) in bytes 1, bits 5, 6, and 7.

20
Cheetah 15K.6 FC Product Manual, Rev. D
5.2.6.2.3 Short and extended tests
DST has two testing options:
1. short
2. extended
These testing options are described in the following two subsections.
Each test consists of three segments: an electrical test segment, a servo test segment, and a read/verify scan
segment.
Short test (Function Code: 001b)
The purpose of the short test is to provide a time-limited test that tests as much of the drive as possible within
120 seconds. The short test does not scan the entire media surface, but does some fundamental tests and
scans portions of the media. A complete rea d/ver ify scan is not per formed and onl y factu al failu res will report a
fault condition. This option provides a quick confidence test of the drive.
Extended test (Function Code: 010b)
The objective of the extended test option is to empirically test critical drive components. For example, the seek
tests and on-track operations test the positioning mechanism. The read operation tests the read head element
and the media surface. The write element is tested through read/write/read operations. The integrity of the
media is checked through a read/verify scan of the media. Motor functionality is tested by default as a part of
these tests.
The anticipated length of the Extended test is reported through the Control Mode page.
5.2.6.2.4 Log page entries
When the drive begins DST, it creates a new entry in the Self-test Results Log page. The new entry is created
by inserting a new self-te st parameter block a t the beginning of t he se lf-test results log p a ram eter section of the
log page. Existing data will be moved to make room for the new parameter block. The drive reports 20 parameter blocks in the log p ag e. If th ere are more than 20 p ar amet er blocks, the least r ecent p a rame ter block will be
deleted. The new parameter block will be initialized as follows:
1. The Function Code field is set to the same value as sent in the DST command
2. The Self-Test Results Value field is set to Fh
3. The drive will store the log page to non-volatile memory
After a self-test is complete or has been aborted, the drive updates the Self-Test Results Value field in its SelfTest Results Log page in non-volatile memory. The host may use Log Sense to read the results from up to the
last 20 self-tests performed by the drive. The self-test results value is a 4-bit field that reports the results of the
test. If the field is set to zero, the drive passed with no errors detected by the DST. If the field is not set to zero,
the test failed for the reason reported in the field.
The drive will report the failure condition and LBA (if applicable) in the Self-test Results Log parameter. The
Sense key, ASC, ASCQ, and FRU are used to report the failure condition.
5.2.6.2.5 Abort
There are several ways to abort a diagnostic. You can use a SCSI Bus Reset or a Bus Device Reset message
to abort the diagnostic.
You can abort a DST executing in background mode by using the abort code in the DST Function Code field.
This will cause a 01 (self-test aborted by the application client) code to appear in the self-test results values
log. All other abort mechanisms will be reported as a 02 (self-test routine was interrupted by a reset condition).

Cheetah 15K.6 FC Product Manual, Rev. D
21
5.2.7 Product warranty
Beginning on the date of shipment to the customer and continuing for the period specified in your purchase
contract, Seagate warrants that each product (including components and subassemblies) that fails to function
properly under no rmal use due to defect in m ater ials or workmanship or due to no nconfo rma nce to the applicable specifications will be repaired or replace d, at Seag ate’s option and at no charge to the custo mer, if returned
by customer at customer’s expense to Seagate’s designated facility in accordance with Seagate’s warranty
procedure. Seagate will pay for transporting the repair or replacement item to the customer. For more detailed
warranty information, refer to the standard terms and conditions of purchase for S eaga te prod uct s on your pur chase documentation.
The remaining warranty for a particular drive can be determined by calling Seagate Customer Service at
1-800-468-3472. You can also determine remaining warranty using the Seagate web site (www.seagate.com).
The drive serial number is required to determine remaining warranty information.
Shipping
When transporting or shipping a drive, use only a Seagate-approved container. Keep your original box.
Seagate approved containers are easily identified by the Seagate Approved Package label. Shippi ng a drive in
a non-approved container voids the drive warranty.
Seagate repair centers may refuse receipt of components improperly packaged or obviously damaged in transit. Contact your authorized Seagate distributor to purchase additional boxes. Seagate recommends shipping
by an air-ride carrier experienced in handling computer equipment.
Product repair and return information
Seagate customer service centers are the only facilities authorized to service Seagate drives. Seagate does
not sanction any third-party repair facilities. Any unauthorized repair or tampering with the factory seal voids
the warranty.

22
Cheetah 15K.6 FC Product Manual, Rev. D
Cheetah 15K.6 FC Product Manual, Rev. D
23
6.0 Physical/electrical specifications
This section provides information relating to the physical and electrical characteristics of the drive.
6.1 AC power re quirements
None.
6.2 DC power re quirements
The voltage and current requirements for a single drive are shown below. Values indicated apply at the drive
connector. Notes are shown following table 6.
 Loading...
Loading...