

seagate ST3636A, ST31276A, ST31082A Product Manual
...................................
Medalist Family:
...................................
ST31276A
...................................
ST31082A
...................................
ST3636A
...................................
Product Manual
...................................


ST3636A/ST31082A/ST31276A
Intelligent Disk Drive
Product Manual
P/N 20401028-001
Revision C
September 1996
920 Disc Drive
Scotts Valley, California
95066


FCC Notice
This equipment generates and uses radio frequency energy and, if not installed
and used properly; that is, in strict accordance with the manufacturer's
instructions, may cause interference to radio and television reception. It has
been type tested and found to comply with the limits for a Class B computing
device in accordance with the specifications in Part 15 of FCC Rules, which are
designed to provide reasonable protection against such interference in a
residential installation. However, there is no guarantee that interference will
not occur in a particular installation. If this equipment does cause interference
to radio or television reception, which can be determined by turning the
equipment on and off, you are encouraged to try to correct the interference by
one or more of the following measures:
• Reorient the receiving antenna.
• Relocate the computer with respect to the receiver.
• Move the computer into a different outlet so that the computer and receiver
are on different branch circuits.
If necessary, you should consult the dealer or an experienced radio/television
technician for additional suggestions. You may find the following booklet
prepared by the Federal Communications Commission helpful:
How to Identify and Resolve Radio-TV Interference Problems
This booklet (Stock No. 004-000-00345-4) is available from the U.S. Government
Printing Office, Washington, DC 20402.
Warning: Changes or modifications made to this equipment which have not
been expressly approved by Seagate Technology, Inc. may cause radio and
television interference problems that could void the user's authority to operate
the equipment.
Further, this equipment complies with the limits for a Class B digital apparatus
in accordance with Canadian Radio Interference Regulations.
Cet appareil numérique de la classe B est conforme au Règlement sur le
brouillage radioélectrique, C.R.C., ch. 1374.
Seagate, Seagate Technology and the Seagate logo are registered trademarks of
Seagate Technology, Inc. All other trademarks mentioned in this manual are
property of their respective owners.
Copyright 1996, Seagate Technology, Inc.
All rights reserved.
Important Information About this Manual
All information contained in or disclosed by this document is considered
proprietary by Seagate Technology, Inc. By accepting this material, the
recipient agrees that this material and the information contained therein are
held in confidence and in trust and will not be used, reproduced in whole or in
part, nor its contents revealed to others, except to meet the purpose for which it
was delivered. It is understood that no right is conveyed to reproduce or
translate any item herein disclosed without express written permission from
Seagate Technology, Inc.
Seagate Technology, Inc. provides this manual "as is," without warranty of any
kind, either expressed or implied, including, but not limited to, the implied
warranties of merchantability and fitness for a particular purpose. Seagate
Technology, Inc. reserves the right to change, without notification, the
specifications contained in this manual.
Seagate Technology, Inc. assumes no responsibility for the accuracy,
completeness, sufficiency, or usefulness of this manual, nor for any problem
that might arise from the use of the information in this manual.

Table of Contents
1. Overview of the Drive 1
2. Specifications 5
What is the Drive? 1
Features of the Drive 1
What the Drive is Composed Of 2
Mechanical Design Features 2
Drive Assembly Housing 2
Head Positioning Mechanism 2
Read/Write Heads and Disks 3
Data and Power Connections 4
Electrical Design Features 4
Pre-amplifier 4
Circuit Board 4
Firmware 4
Specifications In This Chapter 5
Drive Capacity 6
Physical Configuration 6
Performance Characteristics 7
Read/Write Characteristics 8
Reliability 8
Power Requirements 9
Environmental Tolerances 9
Product Test Standards 10
Physical Characteristics 11
3. How the Drive Operates 13
Functions of the Drive 13
Drive Operational Modes 13
Error Correction 13
Universal Translate Mode 14
Master/Slave Configuration 14
Cable Select 15
Forced M/S operation: 15
4. Installing the Drive 17
Take These Precautions 17
Installing the Drive 17
Setting the Drive’s Jumpers 18
Attaching a Data Cable to the Drive 19
Attaching Power to the Drive 21
Mounting the Drive 22
Technical Reference Manual Page i

Table of Contents ST3636A/ST1082A/ST31276A
5. Host Interface 23
About the Host Interface 23
Signal Conventions 23
Signal Levels 23
Signal Descriptions 24
ATA/CAM Master/Slave Reset Timing 26
Host PI0 16-Bit Timing Values 28
Host Demand Mode DMA 16-bit Interface Timing Values 29
6. Register Addresses and Functions 31
Host Address Decoding 31
Addressing the Data 33
Cylinder-head-sector (CHS) mode 33
Logical Block Addressing (LBA) Mode 33
Descriptions of the Registers 34
Data Register 34
Error Register 35
Features Register (formerly Write Precomp Register) 36
Sector Count 36
Sector Number 36
Cylinder Low 37
Cylinder High 37
Device/Head Register 38
Status Register 39
Alternate Status Register 40
Device Control Register 41
Drive Address Register 42
Command Register 42
7. Command Set 45
Command Register 45
Seagate Specific 46
Get Drive Feature word (00) 47
Execute Drive Diagnostic 48
Format Track 48
Identify Device 49
Initialize Device Parameters 53
Power Commands 54
Read DMA 55
Read Multiple 56
Read Sector(s) 57
Read Sector Buffer 58
Read Verify Sectors 58
Recalibrate 59
Seek 59
Set Features (Set Look Ahead Read) 60
Set Multiple Mode 61
S.M.A.R.T. 62
Device Attributes Data Structure 65
Device Attribute Thresholds Data Structure 68
Error Reporting 70
Page ii ST3636A/ST31082A/ST31276A

ST3636A/ST1082A/ST31276A Table of Contents
Write DMA 71
Write Caching 71
Write Multiple 72
Write Caching 72
Write Sector(s) 74
Write Caching 75
Write Sector Buffer 75
8. Error Reporting 77
Error and Status Detection 77
Error and Status Messages 77
Glossary 79
Technical Reference Manual Page iii
Table of Contents ST3636A/ST1082A/ST31276A
Page iv ST3636A/ST31082A/ST31276A
Overview of the Drive
Capacity (formatted):
635MB
1082MB
1275MB
What is the Drive?
The Seagate ST3636A, ST31082A and ST1276A are high-performance, lowprofile hard disk drives that are designed to operate with an IBM PC/AT or
equivalent host computer system in translate mode.
1
Drive Model: Form Factor:
ST3636A inch high, 3.5 inch
ST31082A inch high, 3.5 inch
ST31276A inch high, 3.5 inch
Throughout this document, the Medalist 1276 is referred to as the ST31276A,
The Medalist 1082 is referred to as the ST31082A and the Medalist 636 is
referred to as the ST3636A. For simplicity, we often refer to these drives
collectively in this manual as “the drive”.
Features of the Drive
The drive provides these features:
• can be installed in a wide range of host systems
• high-performance rotary voice coil actuator with embedded servo
• one-of-seven run-length limited code
• high shock resistance
• automatic actuator latch against inner stop upon power-down
No. of disks/heads:
1 disk/2 heads
2 disks/4 heads
2 disks/4 heads
Technical Reference Manual Page 1
• microprocessor-controlled diagnostic routines that are automatically
executed at start-up
• PIO mode 4, multiword DMA 2 support
• 64KB buffer with adaptive cache management
• Read Look Ahead and Write Caching
• automatic error correction and retries, ECC on the fly
• 512-byte block size
• emulates IBM Task File and supports additional commands
• allows daisy-chaining up to two drives on the AT interface
• Auto-Translate (Universal Translate)
• Reed-Solomon ECC capable of correcting two 17-bit errors or a single 41-bit
error without incurring additional latency.
• Supports the ATA (AT Attachment) Interface Standard
Chapter 1 Overview of the Drives
What the Drive is Composed Of
The drive is composed of mechanical, electrical, and firmware elements.
Mechanical Design Features
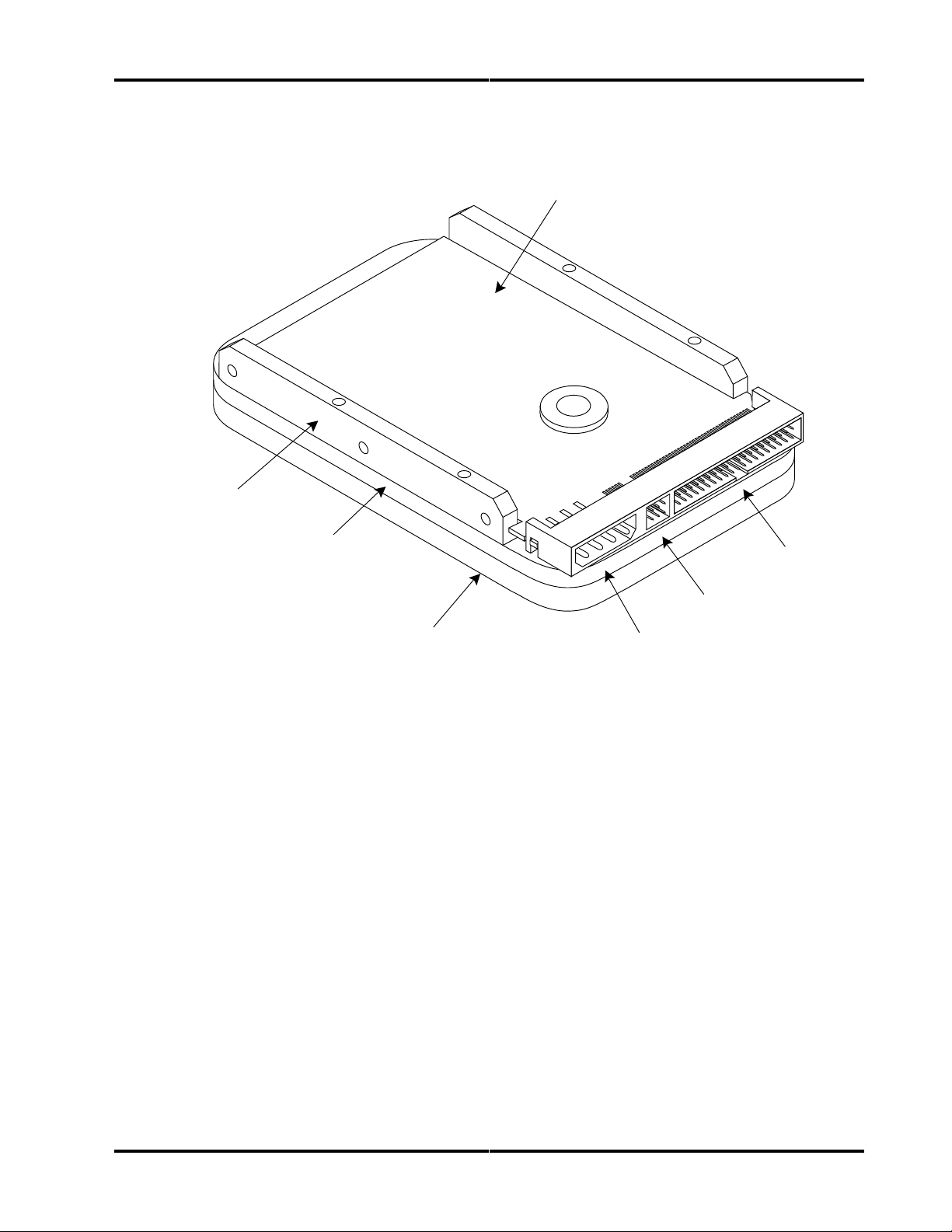
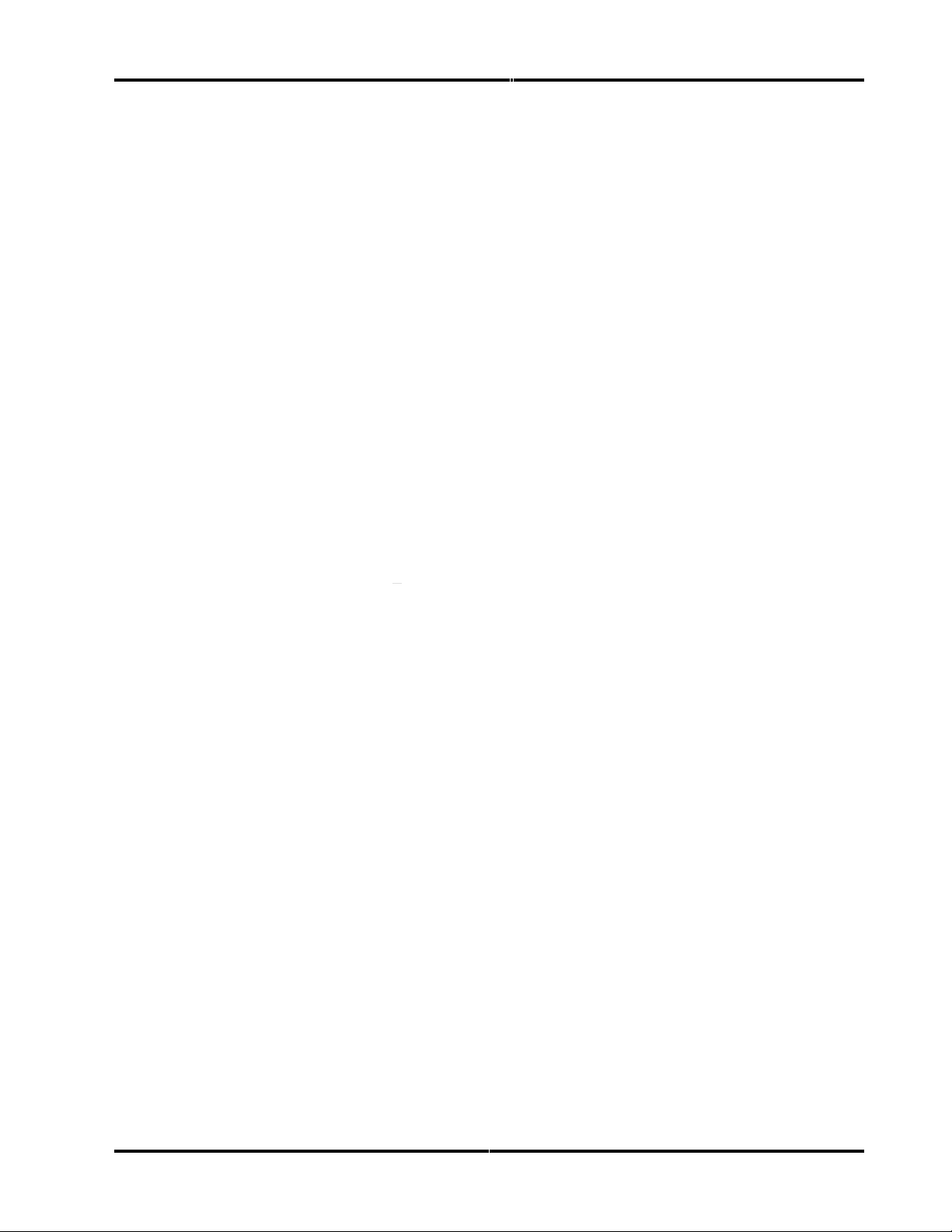
The drive’s hardware includes the components described in the following
sections. Figure 1-1 shows some of these components.
Drive Assembly Housing
The drive assembly housing consists of an extruded aluminum base on which is
mounted a drawn aluminum cover. In addition, the aluminum cover has a
designed in breather filter and diffusion tube that prevents entry of
contaminants which might degrade head and media reliability. Aluminum tape
seals the joint between the base and cover. Critical drive components are
contained within this contaminant-free environment, which is commonly
referred to as the Head-Disk Assembly (HDA).
Drive Motor and Spindle
A brushless DC direct-drive motor assembly is mounted on the drive’s base. The
motor rotates the drive’s spindle at 4500 RPM. The motor/spindle assembly is
dynamically balanced to provide minimal mechanical runout to the disks. A
dynamic brake is used to provide a fast stop to the spindle motor and return the
heads to the landing zone when power is removed.
Head Positioning Mechanism
The read/write heads are supported by a mechanism coupled to a rotary voice
coil actuator.
Page 2 ST3636A/ST31082A/ST31276A
Overview of the Drives Chapter 1
Figure 1-1
Hard Drive Components
Printed Circuit
Board Assembly
Extruded Base
Aluminum Tape
Seal
Drawn Aluminum
Cover
Standard 4-Pin
Power Connector
40-Pin Data Connector
(Task File Interface)
Jumper
Option
Block
Read/Write Heads and Disks
Data is recorded on a 95mm diameter disk using thin film tri-pad or close
proximity head.
The ST3636A contains:
• one disk with two data surfaces
• two read/write heads
The ST31082A and ST31276A contain:
• Two disk with four data surfaces
• four read/write heads
At power-down, the heads are automatically retracted to the inner diameter of
the disk and are latched and parked on a landing zone that is separate from the
data tracks.
Technical Reference Manual Page 3

Chapter 1 Overview of the Drives
Data and Power Connections
The drive has a single 40-pin data connector, as well as an auxiliary connector
which is reserved for factory or evaluation use. Power to the drive is provided
through a standard 4-pin connector.
The drive also has a jumper block which can be set to specify drive operational
parameters. For more information on the drive’s connectors and on setting
jumpers, refer to chapters 3 and 4.
Electrical Design Features
Pre-amplifier
A single integrated circuit (IC) is mounted within the head disk assembly, in
close proximity to the read/write heads. The IC provides head selection, read
pre-amplification, and write drive circuitry.
Circuit Board
Firmware
The drive’s microprocessor-controlled circuit board provides the remaining
electronic functions, which include:
• read/write circuitry
• rotary actuator control
• interface control
• spin speed control
• auto-park
• power management
The drive’s firmware includes a command set which the host uses to control the
drive. The command set allows the host to request the following types of
actions:
• report drive status
• seek a specific point on the disk
• read and write data
For more information on the drive’s command set, refer to chapters 6 and 7.
Page 4 ST3636A/ST31082A/ST31276A
Specifications
2
Specifications In This Chapter
This chapter defines the following specifications for the drive:
• drive capacity
• physical configuration
• performance characteristics
• read/write characteristics
• reliability
• power requirements
• environmental tolerances
• safety standards
• physical characteristics
Technical Reference Manual Page 5
Chapter 2 Specifications
Drive Capacity
Formatted Capacity:
•
• ST31082A: 1082MB
• ST31276A: 1275MB
ST3636A: 635MB
* 1MB = 1 x 106 bytes
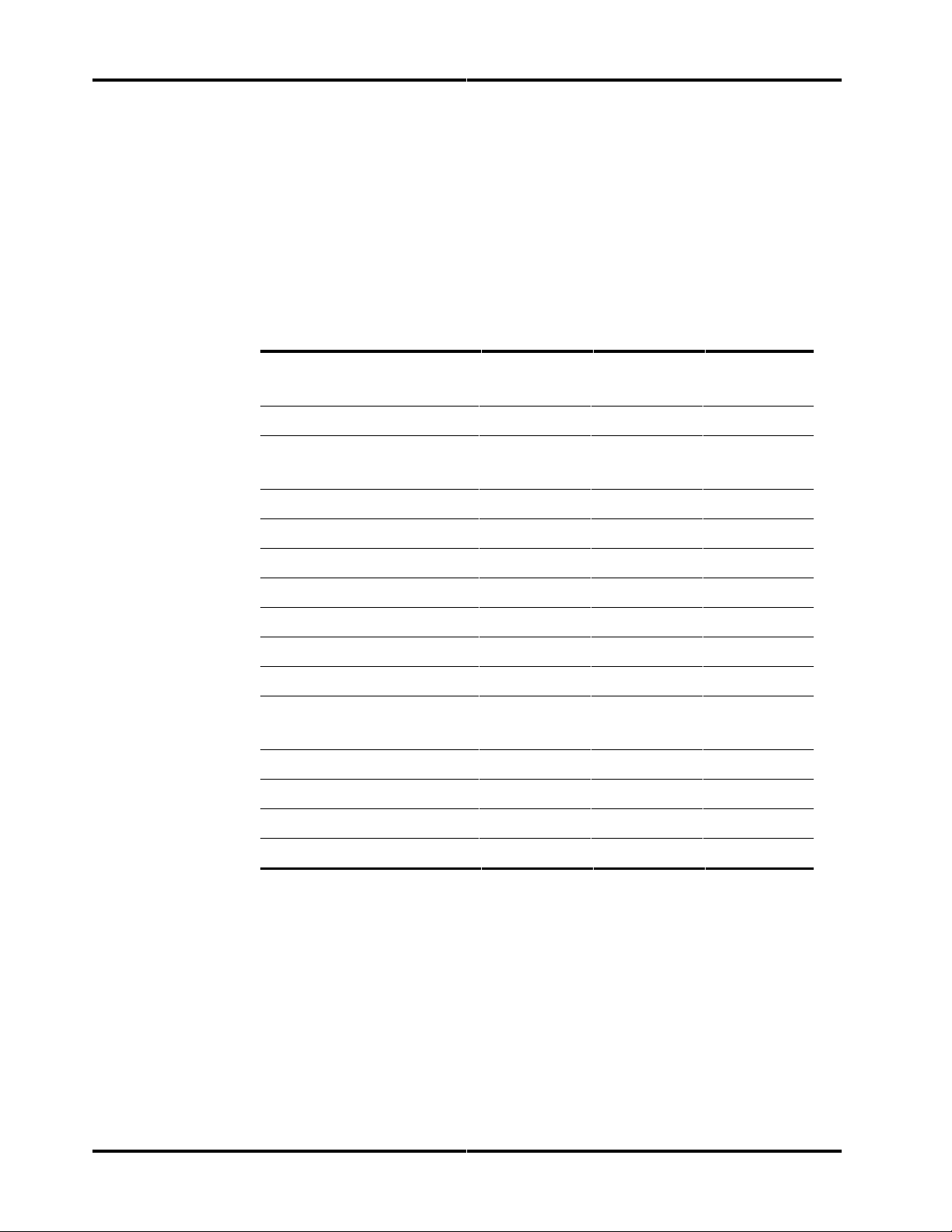
Physical Configuration
Specification ST3636A: ST31082A: ST31276A:
Disk Type
Head Type
Actuator Type
Number of Disks
Data Surfaces
Data Heads
Servo
Tracks per Surface
Buffer Size
Track Density
Formatted Track Capacity
Bytes per Block
Blocks per Drive
Sputtered
Thin Film
Thin Film Thin Film Thin Film
Rotary Voice
Coil
122
244
244
Embedded Embedded Embedded
4893 4893 4893
64KB 64KB 64KB
4973 tpi 4973 tpi 4973 tpi
43,520-
84,992 bytes
512 512 512
1,250,928 2, 114,180 2,501,856
Sputtered
Thin Film
Rotary Voice
Coil
43,52084,992 bytes
Sputtered
Thin Film
Rotary Voice
Coil
43,52084,992 bytes
Sectors per Track (User)
Translate
* Refer to chapter 3 for a definition of Universal Translate Mode
85-166 85-166 85-166
Universal Universal Universal
Page 6 ST3636A/ST31082A/ST31276A
Specifications Chapter 2
Performance Characteristics
Seek Times (typical)* :
• Track to track: 3.0 ms
• Average: 12.5 ms
• Maximum: 24 ms
• The timing is measured through the interface with the drive operating at nominal DC input voltage
and nominal operating temperature. The timing also assumes that:
• BIOS and PC system hardware dependency have been subtracted from timing measurements
• the drive is operated using its native drive parameters
• the controller overhead is the time it takes to assert +HOST IRQ after the host writes the
command register with a READ instruction, for the case where the data already resides in the
buffer
* The average seek time is determined by averaging the seek time for a minimum of 1000 seeks of
random length over the surface of the disk.
Average Latency:
• 6.67ms
Rotation Speed:
• 4500 RPM (+
0.25%)
Controller Overhead:
• <1.0ms
Start Time at Power-Up: *
• 0 RPM to 4500 RPM
- Typical: 6 seconds
- Maximum: 10 seconds
• 0 RPM to Ready
- Typical: 10 seconds
- Maximum: 20 seconds
* These numbers assume spin recovery is not invoked. If spin recovery is invoked, the maximum
could be 40 seconds. Briefly removing power can lead to spin recovery being invoked.
Stop Time at Power-Down:
• Typical: 10 seconds
• Maximum: 20 seconds
Interleave:
• 1:1
Technical Reference Manual Page 7

Chapter 2 Specifications
Read/Write Characteristics
Interface:
• Task File
Recording Method:
• 1 of 7 RLL code
Recording Density (ID):
• 88,400 bits per inch
Flux Density (ID):
• 66,300 flux reversals per inch
Data Transfer Rate:
• To/From Media: 33.6 megabits/second - 67.2 megabits/second
• To/From Host: PIO Mode 4 (16.7 MB/second) or Multiword DMA Mode 2
Reliability
Data Reliability:
• < 1 non-recoverable error in 10
Component Design Life:
• 5 years
Start/Stop Cycles:
• 40,000 minimum
Mean Time Between Failures:
• 300,000 power-on hours
Mean Time to Repair:
• 10 minutes typical
Preventive Maintenance:
• none
14
bits read
Page 8 ST3636A/ST31082A/ST31276A
Specifications Chapter 2
Power Requirements
+5 Volts
Mode: *
Read/Write
Seek/Rd/Wr
Idle
Standby
Sleep
Spin-Up
Peak
* Refer to chapter 3 for the definitions of the modes. Spin-Up Mode current draw is for 7 seconds,
maximum. Maximum power is when the supply voltage is at the worst case condition.
(typical):
450 mA 160 mA 4.2 W 4.6 W
430 mA 200 mA 4.6 W 4.9 W
270 mA 180 mA 3.5 W 4.0 W
200 mA 0 mA 1.0 W 1.2 W
130 mA 0 mA 0.7 W 1.0 W
500 mA 1200 mA N/A N/A
500 mA 1200 mA N/A N/A
+12 Volts
(typical):
Watts
(typical):
(maximum):
Minimum/Maximum Voltage:
• +5V: +
• +12V: +
5%
5%
Maximum Peak-to-Peak Noise Allowed (DC to 1 MHz, with equivalent
resistive load):
• +5V: 2%
• +12V: 1%
Environmental Tolerances
Temperature:
• Operating: 5° to 55° C
• Non-operating: -40° to 60° C
• Thermal Gradient: 20
Relative Humidity (non-condensing):
• Operating: 8 to 80%
• Non-operating: 8 to 80%
• Wet Bulb: 28.9
Altitude (relative to sea level):
• Operating: -200 to 10,000 feet
• Non-operating:-200 to 40,000 feet (maximum)
• Altitude Gradient: 1,000 feet/minute
Shock (half-sine pulse, 11 ms duration):
• Operating: 5G without non-recoverable errors
• Non-operating: 75G without non-recoverable errors
o
C per hour maximum
o
C maximum
Technical Reference Manual Page 9
Chapter 2 Specifications
Vibration (swept-sine, one octave per minute):
• Operating
− 5 - 22 Hz: 0.020 inch displacement; double amplitude, 1 octave per
minute.
− 23 - 350 Hz: 0.5G peak without non-recoverable errors
• Non-operating
− 5 - 22 Hz: 0.20 inch displacement; double amplitude, 1 octave per
minute
− 23 - 350 Hz: 5G peak
Magnetic Field:
• The disk drive will meet its specified performance while operating in the
presence of an externally-produced magnetic field under the following
conditions:
Field Frequency Intensity
DC
to 700 Khz
700 Khz to 1.5 Mhz
Acoustic Noise:
• The sound pressure level will not exceed 34 dBA in Idle Mode at a distance
of 1 meter from the drive. The sound power level measured based on ISO
7779 will not exceed 4.0 Bel in Idle Mode.
Product Test Standards
The drive is designed to comply with relevant product safety standards,
including:
• UL 478, 5th edition, Standard for Safety of Information Processing and
Business Equipment
• UL 1950, Standard for Safety of Information Technology Equipment
• CSA 22.2 #220, Information Processing and Business Equipment
• CSA 22.2 #950, Safety of Information Technology Equipment
6 gauss
7 milligauss
3 milligauss
• IEC 380, Safety of Electrically Energized Office Machines
• IEC 950, Safety of information Technology Equipment Including Electrical
Business Equipment
• VDE 0805, VDE 0805 TIEL 100, and VDE 0806
The drive has been tested for compliance with FCC Class B, Part 15, Subpart J
The drive has been tested to be compatible with EMC directive 89/336/EEC.
Page 10 ST3636A/ST31082A/ST31276A
Specifications Chapter 2
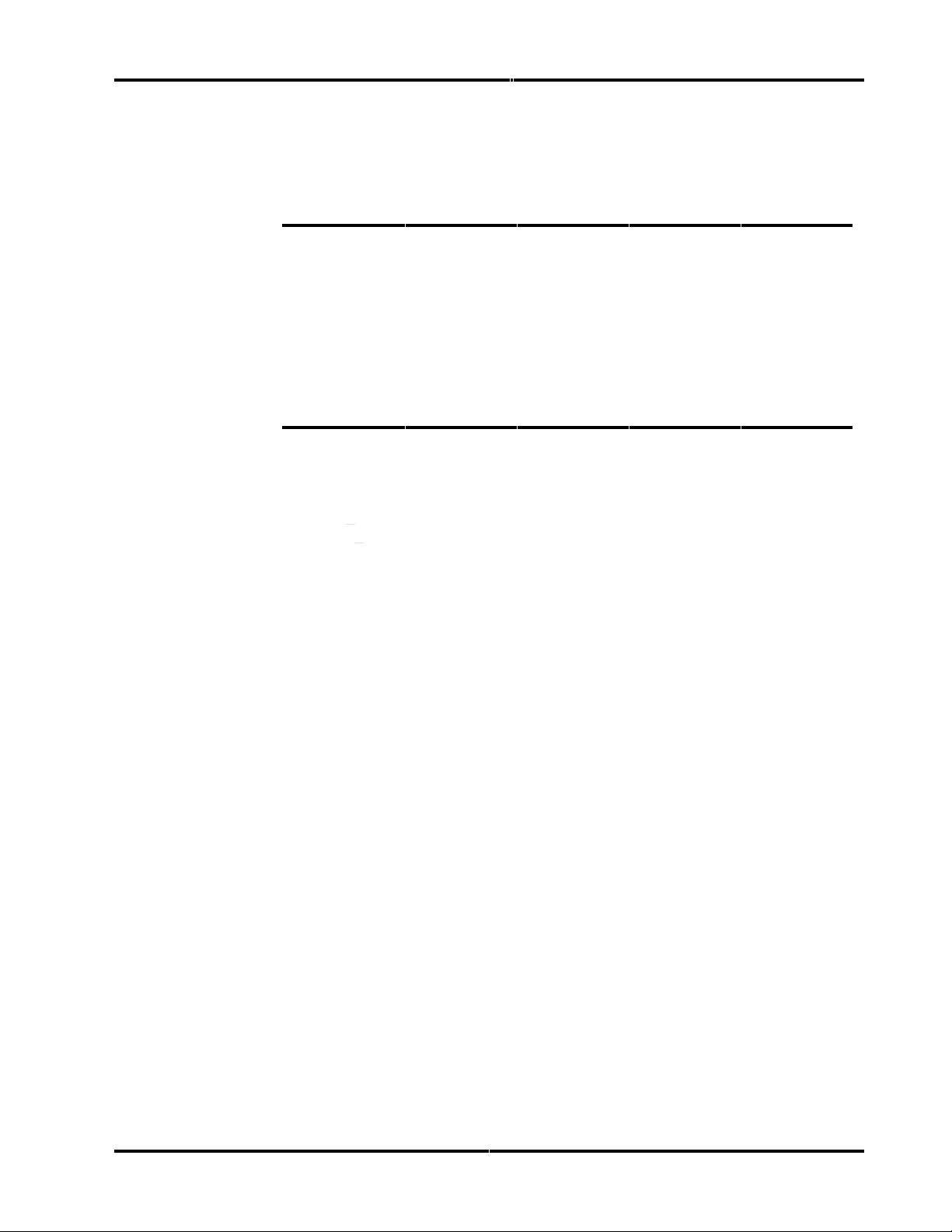
Physical Characteristics
Note: [mm]
.xx + .01
.xxx + .005
Height:
• 1.0 inch +
.030
Width:
• 4.0 inches +
.030
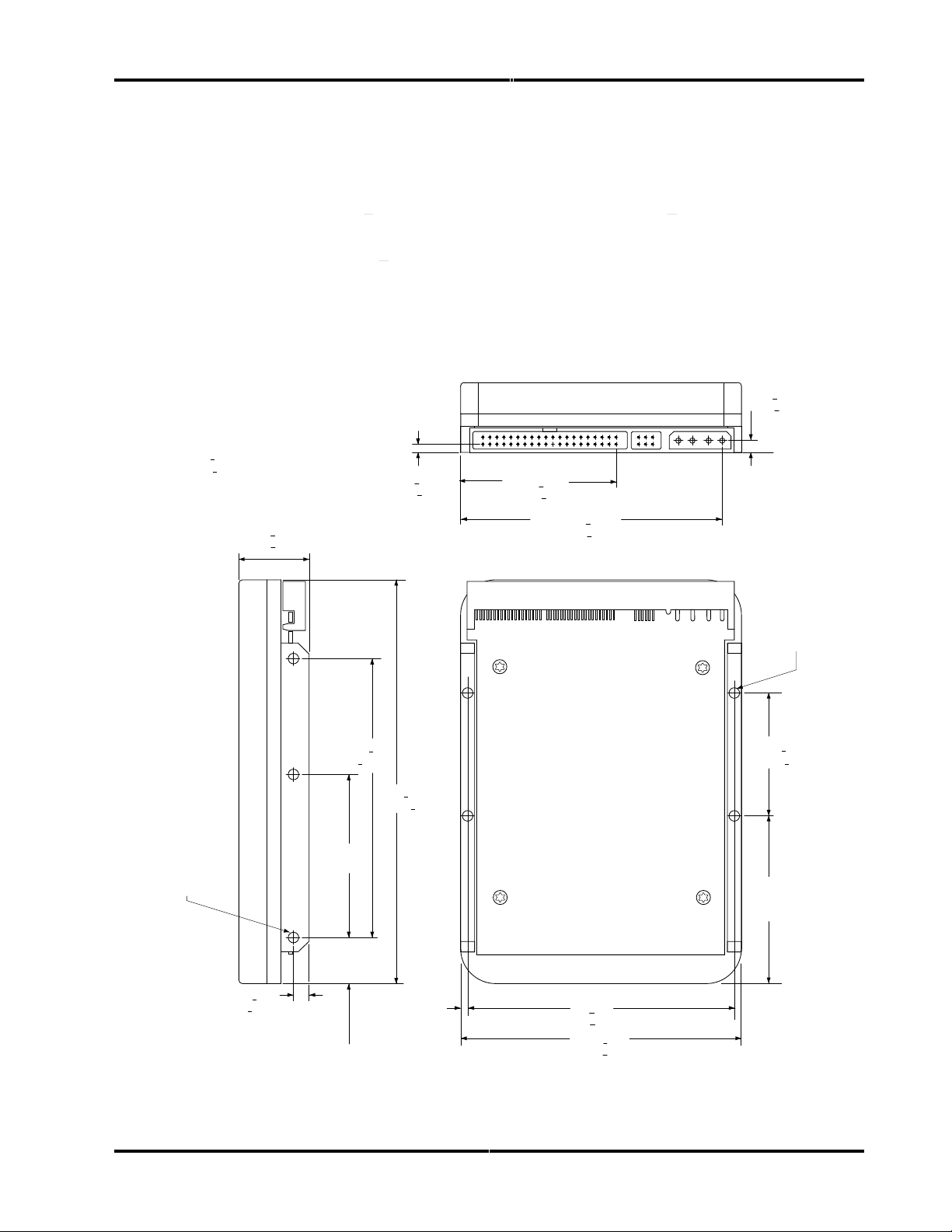
Figure 2-1
The Drive’s Physical Dimensions
0.18 +.015
[4.572 +.381]
1.00 +.03
[25.4 +.762]
2.227 +.03-
[56.565 +.762]
3.716 +.03
[94.386 +.762]
Depth:
• 5.75 inches + .030
Weight:
• ST3636A :1.1 lbs
ST31082A and ST31276A:1.2 lbs
0.23 +.015
[5.842 +.381]
4X 6-32 UNC-2B
.25 MAX. INSERTION
[6.35]
1.750+.01
[44.45+.254]
+.03
2.375
- .005
+.762
[60.325 ]
- .127
3x 6-32 UNC-2B
.25 MAX. INSERTION
[6.35]
BOTH SIDES
3x.250 + .015
[6.35 +.381]
BOTH SIDES
4.000+
[101.6+ .254]
2.362 +.01
[59.994+ .254]
+.03
.630
- .005
+.762
[16.0 ]
- .127
.01
5.75 +.03
[146.05 +.762]
+.03
.125
- .005
[3.175 ]
+.762
- .127
3.750 +.01
[95.25+.254]
4.00 +.03
[101.6 +.762]
Technical Reference Manual Page 11

Chapter 2 Specifications
Page 12 ST3636A/ST31082A/ST31276A
How the Drive Operates
3
Functions of the Drive
This chapter describes certain operational aspects of the drive, including
discussions of:
• drive operational modes
• error correction
• Universal Translate Mode
• master/slave configurations
Drive Operational Modes
The drive operates in the following modes:
• Read/Write Mode occurs when data is read from or written to the disk.
• • Seek/Rd/Wr Mode occurs when the drive is operated in a random
seeking read/write mode with a 30% seek duty cycle.
• Idle Mode occurs when the drive is not reading, writing, or seeking. The
motor is up to speed and the Drive Ready condition exists. The actuator
is residing on the last-accessed track.
Error Correction
• Standby Mode occurs when the motor is stopped and the actuator is
parked. Standby Mode occurs after a programmable time-out since the
last host access occurs. The drive will leave Standby Mode upon receipt of
a command which requires disk access, or upon receipt of a spin-up
command.
• Sleep Mode occurs when all electronics are disabled. The host is
required to issue a Reset command to exit the Sleep Mode.
• Spin-Up Mode occurs while the drive is spun up to speed after being
powered on or after exiting Standby or Sleep Mode.
The drive uses a Reed-Solomon code to perform error detection and correction.
For each 512-byte block, the Reed-Solomon correction polynomial is capable of
correcting:
• one error with a burst length of up to 41 bits
• two errors with burst lengths of up to 17 bits each
without incurring additional latency.
Technical Reference Manual Page 13
Chapter 3 How the Drive Operates
No. of
Sectors:
63
63
63
Universal Translate Mode
Seagate has established a Universal Translate Mode which enables you to
configure the drive in an AT environment to any cylinder, head, and sector
configuration desired. The translate configuration is limited by the maximum
capacity of the drive and host system parameters. Upon initial power-up of the
drive, it will default to the configuration shown below:
No. of
Drive:
Cylinders:
No. of Heads
ST3636A
ST31082A
ST31276A
After the drive is ready, the host system may issue an Initialize Device
Parameters command (command code 91
configuration (number of heads and number of sectors per track). The drive will
then calculate the total number of available logical cylinders based upon the
values contained in the Sector Count and Drive/Head registers.
Master/Slave Configuration
When two drives are daisy-chained on the host interface, one must be
designated as the master drive (drive 0) and one as the slave drive (drive 1).
Commands from the host are written in parallel to both drives.
When the D0 jumper on the drive is closed, the drive will assume the role of a
master. When D0 is open, the drive will act as a slave. In single-drive
configurations, D0 must remain in the closed (master) position. For more
information on setting the D0 jumper, refer to chapter 4.
1241 16
2097 16
2482 16
hex) to alter the translate
For each command sent from the host, the DRV bit in the Device/Head register
selects the master or the slave drive. When the DRV bit is reset (0), the master
drive is selected, and when the DRV bit is set (1), the slave drive is selected.
Once the drives receive the command, only the drive with jumper D0 set to the
appropriate position will execute the command. For example, if the DRV bit is
set, only the slave drive (jumper D0 open) will execute the command.
☞☞ Note: If the command is a diagnostic command, both drives will execute the command and the slave
will report its status to the master via the Host PDIAG signal.
Throughout this manual, drive selection always refers to the state of the DRV
bit and the position of the D0 jumper.
Page 14 ST3636A/ST31082A/ST31276A

How the Drive Operates Chapter 3
Cable Select
This optional method of drive Master/Slave designation can be enabled by D1
jumper selection as described in Chapter 4. If used, special cabling can be used
to selectively ground CSEL of the drive intended to be drive C (0). This drive
will then function as the Master. If CSEL is allowed to float the drive will
recognize itself as drive D (1) and function as the Slave.
Forced M/S operation:
This method of drive M/S forces the drive to act as a master with a slave
present. This feature is designed to allow drives with incompatible M/S modes
to operate properly. Both the D0 and the D1 jumpers should be on to initiate
this mode of operation.
Technical Reference Manual Page 15

Chapter 3 How the Drive Operates
Page 16 ST3636A/ST31082A/ST31276A
 Loading...
Loading...