

seagate ST173404LW, ST173404LWV, ST173404LC, ST173404LCV Product Manual
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cheetah 73 Family:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST173404LW/LWV/LC/LCV
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual, Volume 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .


. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cheetah 73 Family:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST173404LW/LC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual, Volume 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

© 2000-2001 Seagate Technology LLC All rights reserved
Publication number: 83329478, Rev. F
January 2001
Seagate, Seagate Technology, and the Seagate logo are registered trademark s of Seagate Te chnology
LLC. Cheetah, SeaFAX, SeaFONE, SeaBOARD, and SeaTDD are either trademar ks or reg istered trademarks of Seag ate Tech nology LLC, or one of its subsidiaries. All other trademarks or registered trad emarks are the property of their respective owners.
Seagate reser ves the right to change, without notice, product offerings or spe cifications. No part of this
publication may be reproduced in any form without written permission of Seagate Technology LLC.

Revision status summary sheet
Revision Date Writer/Engineer Sheets Affected
Rev. A 09/22/1999 L. Newman/G. Velaski 1/1, v thru viii, 1-75.
Rev. B 03/24/2000 L. Newman/G. Velaski All.
Rev. C 06/20/2000 L. Newman/G. Velaski Pages 27 and 51.
Rev. D 08/30/2000 K. Schweiss/G. Velaski Pages 7, 10, 25, & 46.
Rev. E 11/07/2000 L. Newman/G. Velaski Page 25.
Rev. F 01/17/2001 L. Newman/G. Velaski Page 30.
Notice.
Product Manual 83329478 is Volume 1 of a two volume document with the SCSI Interface information in
the Volume 2 SCSI Interface Product Manual, part number 75789509.
If you need the SCSI Interface information, order the Volume 2 Interface Manual, part number
75789509.


Cheetah 73 Product Manual, Rev. F v
Contents
1.0 Scope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2.0 Applicable standards and reference documentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Standards. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Electromagnetic compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 Electromagnetic susceptibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Electromagnetic compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Reference documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.0 General description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.1 Standard features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 Media characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.3 Performance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.4 Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.5 Unformatted and formatted capacities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.6 Programmable drive capacity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.7 Factory installed accessories. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.8 Options (factory installed). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.9 Accessories (user installed) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.0 Performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.1 Internal drive characteristics (transparent to user). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.2 SCSI performance characteristics (visible to user) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.2.1 Access time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.2.2 Format command execution time (minutes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.2.3 Generalized performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.3 Start/stop time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.4 Prefetch/multi-segmented cache control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.5 Cache operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.5.1 Caching write data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.5.2 Prefetch operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.0 Reliability specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1 Error rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.1 Environmental interference. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.2 Read errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.3 Write errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.4 Seek errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.2 Reliability and service. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2.1 Mean time between failure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2.2 Field failure rate vs time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2.3 Preventive maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2.4 Service life . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2.5 Service philosophy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2.6 Service tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2.7 Hot plugging Cheetah 73 disc drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2.8 S.M.A.R.T. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2.9 Drive Self Test (DST) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.2.10 Product warranty. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.0 Physical/electrical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6.1 AC power requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6.2 DC power requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6.2.1 Conducted noise immunity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.2.2 Power sequencing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.2.3 12 V - Current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.3 Power dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
6.4 Environmental limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25

vi Cheetah 73 Product Manual, Rev. F
6.4.1 Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
6.4.2 Relative humidity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
6.4.3 Effective altitude (sea level). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
6.4.4 Shock and vibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
6.4.5 Air cleanliness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
6.4.6 Acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
6.4.7 Electromagnetic susceptibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
6.5 Mechanical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
7.0 Defect and error management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
7.1 Drive internal defects. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
7.2 Drive error recovery procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
7.3 SCSI systems errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
8.0 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
8.1 Drive ID/option select header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
8.1.1 Notes for Figures 12, 13, and 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
8.1.2 Function description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
8.2 Drive orientation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
8.3 Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
8.3.1 Air flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
8.4 Drive mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
8.5 Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
9.0 Interface requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
9.1 General description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
9.2 SCSI interface messages supported. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
9.3 SCSI interface commands supported . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
9.3.1 Inquiry Vital Product data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
9.3.2 Mode Sense data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
9.4 SCSI bus conditions and miscellaneous features supported . . . . . . . . . . . . . . . . . . . . . . . . .50
9.5 Synchronous data transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
9.5.1 Synchronous data transfer periods supported. . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
9.5.2 REQ/ACK offset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
9.6 Physical interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
9.6.1 DC cable and connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
9.6.2 SCSI interface physical description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
9.6.3 SCSI interface cable requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
9.6.4 Mating connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54
9.7 Electrical description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
9.7.1 Multimode—SE and LVD alternatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
9.8 Terminator requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
9.9 Terminator power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
9.10 Disc drive SCSI timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
9.11 Drive activity LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
10.0 Seagate Technology support services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67

Cheetah 73 Product Manual, Rev. F vii
List of Figures
Figure 1. Cheetah 73 family drive (ST173404LW shown). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Figure 2. Cheetah 73 family drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 3. Typical Cheetah 73 family drive +12 V current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 4. Typical Cheetah 73 SCSI SE mode +5 V current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 5. Typical Cheetah 73 SCSI LVD mode +5 V current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 6. DC current and power vs. input/output operations per second (single-ended mode) . . . . . . 24
Figure 7. DC current and power vs. input/output operations per second (LVD mode) . . . . . . . . . . . . . 24
Figure 8. Locations of PCBA components listed in Table 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figure 9. Recommended mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 10. ST173404LW mounting configuration dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 11. ST173404LC mounting configuration dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figure 12. J6 jumper header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 13. J5 jumper header (on LW and LWV models only) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 14. J2 option select header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 15. Air flow (suggested) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 16. ST173404LW drive physical interface (68-pin J1 SCSI I/O connector) . . . . . . . . . . . . . . . . . 52
Figure 17. ST173404LC drive physical interface (80-pin J1 SCSI I/O connector) . . . . . . . . . . . . . . . . . 52
Figure 18. SCSI daisy chain interface cabling for LW/LWV drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Figure 19. Nonshielded 68 pin SCSI device connector used on LW/LWV drives . . . . . . . . . . . . . . . . . . 56
Figure 20. Nonshielded 80 pin SCSI “SCA-2” connector, used on LC/LCV drives . . . . . . . . . . . . . . . . . 57
Figure 21. LVD output signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Figure 22. Typical SE-LVD alternative transmitter receiver circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63

Cheetah 73 Product Manual, Rev. F 1
1.0 Scope
This manual describes Seagate Technology® LLC. Cheetah 73™ disc drives.
Cheetah 73 dr ives suppor t the small computer system interface (SCSI ) as des cribed in the ANSI SCSI SPI-3
interface specifications to the extent descr ibed in this manual. The SCSI Inte rface Product Manual (par t number 75789509) describes general SCSI interface characteristics of this and other families of Seagate drives.
From this point on in this product manual the reference to Cheetah 73 mode ls is referred to as “the drive”
unless references to individual models are necessary.
Figure 1. Cheetah 73 family drive (ST173404LW shown)

2 Cheetah 73 Product Manual, Rev. F

Cheetah 73 Product Manual, Rev. F 3
2.0 Applicable standards and reference documentation
The drive has been developed as a system peripheral to the highest standards of design and construction. The
drive depends upon i ts host equip ment to provide adequ ate power and environment i n order to achieve optimum performance and compli ance with applicable industry and governm ental regulations. Special attention
must be given in the areas of safety, power distribution, shielding, audible noise control, and temperature regulation. In particular, the drive must be se cure ly mo unte d i n o rd er to guaran tee the s pecified performance c haracteristics. Mounting by bottom holes must meet the requirements of Section 8.4.
2.1 Standards
The Cheetah 73 family complies with Seagate st andards as noted in the appropr iate sections of this Manual
and the Seagate SCSI Interface Product Manual.
The Cheetah 73 disc drive is a UL rec ognized component pe r UL1950, CSA cer ti fied to CSA C22.2 No. 950M89, and VDE certified to VDE 0805 and EN60950.
2.1.1 Electromagnetic compatibility
The drive, as delivered, is designed for system integration and installation into a suitable enclosure prior to use.
As such the drive is suppli ed as a subassembly and is not su bject to Subpar t B of Part 15 of the FCC Rules
and Regulations nor the Radio Interference Regulations of the Canadian Department of Communications.
The design characteristics of the drive serve to minimize radiation when installed in an enclosure that provides
reasonable shielding. As such, the drive is capable of meeting the Class B limits of the FCC Rules and Regulations of the Canadian Department of Communications when properly packaged. However, it is the user’s
responsibility to assure that the drive meets the appropriate EMI req uirements in their syst em. Shielded I/O
cables may be required if the e nclosure does not provide ad equate sh ielding. If the I/O c ables are externa l to
the enclosure, shielded cables should be used, with the shields grounded to the enclosure and to the host controller.
2.1.2 Electromagnetic susceptibility
As a component assembly, the drive is not required to meet any susceptibility per formance requ irements. It is
the responsibility of tho se integrating the dr ive within their sy stem s to perform thos e tests req uired and design
their system to ensu re that equipment operating in the sam e system as the drive or external to the s ystem
does not adversely affect the performance of the drive. See Section 5.1.1 and T able 2, DC power requirements.
2.2 Electromagnetic compliance
Seagate uses an independ ent laboratory to co nfirm compliance to the directives/standard(s) for CE Mark ing
and C-Tick Marking. The drive was tested in a representative system for typical applications. The selected system represents the most popular characteristics for test platforms. The system configurations include:
• Typical current use microprocessors
• 3.5-inch floppy disc drive
• Keyboard
• Monitor/display
• Printer
• External modem
• Mouse
Although the test system wi th this Seag ate mode l co mpl ie s to the dire cti ves/standa rd(s ), we cann ot gua rante e
that all systems will comply. The computer manufacturer or system i ntegrator shall confir m EMC complianc e
and provide CE Marking and C-Tick Marking for their product.
Electromagnetic compliance for the European Union
If this model has the CE Marki ng it complies with the European Union requirem ents of the Electromagnetic
Compatibility Direc tive 89/336/EEC o f 03 May 1989 as ame nded by Direct ive 92/31/EE C of 28 Ap r il 1992 an d
Directive 93/68/EEC of 22 July 1993.

4 Cheetah 73 Product Manual, Rev. F
Australian C-Tick
If this model has the C-Tick Markin g it complies with the Australia/New Zea land Standard A S/NZS3548 199 5
and meets the Electro magnetic Compatibility (EMC) Framework requirements of Australia’s Spectrum Management Agency (SMA).
2.3 Reference documents
Cheetah 73 Installation Guide Seagate P/N 83329479
Safety and Regulatory Agency Spec ifi catio ns Seagate P/N 75789512
SCSI Interface Product Manual Seagate P/N 75789509
Safety and Regulatory Agency Specifications Seagate P/N 75789512
ANSI small computer system interface (SCSI) document numbers:
T10/1143D Enhanced SCSI Parallel Interface (EPI)
T10/1236D Primar y Comm and s-2 (S PC -2 )
T10/996D SCSI Block Commands (SBC)
T10/1157D SCSI Architectural Mode l-2 (S AM - 2)
T10/1302D SPI-3 (SCSI Parallel Interface version 3)
SFF-8046 Specification for 80-pin connector
Package Test Specification Seagate P/N 30190-001 (under 100 lb.)
Package Test Specification Seagate P/N 30190-001 (under 100 lb.)
Package Test Specification Seagate P/N 30191-001 (over 100 lb.)
Specification, Acoustic Test Requirements, and Procedures Seagate P/N 30553-001
In case of conflict between this document and any referenced document, this document takes precedence.

Cheetah 73 Product Manual, Rev. F 5
3.0 General description
Cheetah 73 drives combine giant magnetoresistive (GMR) heads, partial response/maximum likelihood
(PRML) read channel el ectroni cs, embedd ed ser vo tech nology, and a wide Ultra160 SCSI interface to provide
high performance, high capaci ty data storage for a variety of syste ms incl uding en ginee ring work statio ns, network servers, mainframes, and supercomputers.
Ultra160 SCSI use neg otiated transfer rates. These transfer rates w ill occ ur only if your host ada pter supp orts
these data transfer rates and is compatible with the required hardware requirements of the I/O circuit type. This
drive also operates at SCSI-1 and SCS I-2 data transfer rates for backward compatibility with non -Ultra/Ultra2 /
Ultra160 SCSI host adapters.
Table 1 lists the features that differentiate the two Cheetah 73 models.
Table 1: Drive model number vs. differentiating features
Model number
ST173404LW
ST173404LWV
ST173404LC
ST173404LCV
Number
of heads I/O circuit type [1]
24 Single-ended (SE) and low volt-
age differential (LVD)
24 Single-ended (SE) and low volt-
age differential (LVD)
Number of I/O
connector pins
Number of I/O
data bus bits
68 16
80 16
[1] See Section 9.6 for details and definitions.
The drive records and recovers data on approximately 3.3-inch (84 mm) non-removeable discs.
The drive suppor ts the Small Computer System Interface (SCSI) as descr ibed in the ANSI SCSI-2/SCSI-3
interface specifications t o the extent described in this manual (volume 1), which defines the product performance characteristics of the Cheetah 73 family of drives, and the SCSI Interface Product Manual, which
describes the general interface characteristics of this and other families of Seagate SCSI drives.
The drive’s interface supports multiple initiators, disconnect/reconnect, self-configuring host software, and
automatic features that relieve the host from the necessity of knowing the physical characteristics of the targets
(logical block addressing is used).
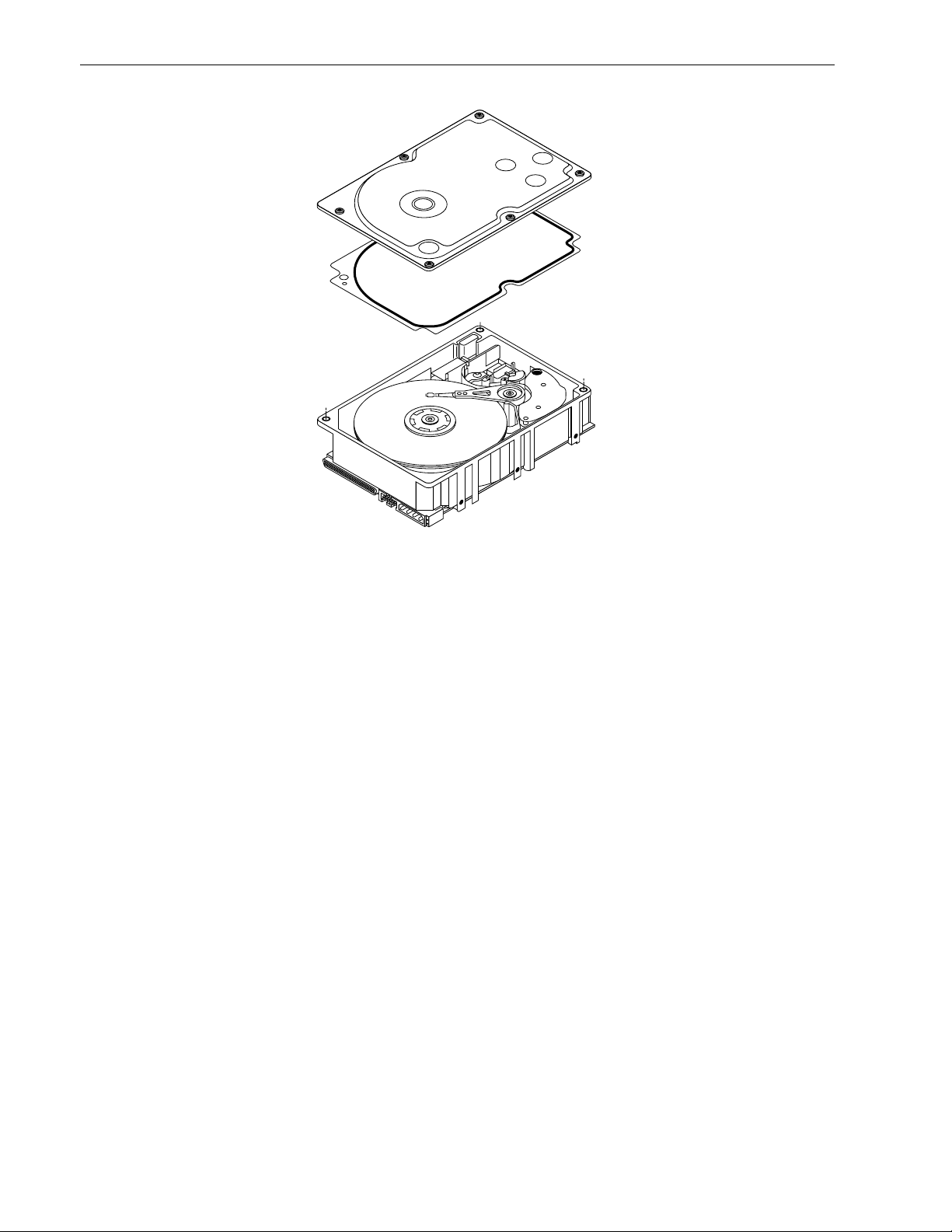
The head and disc assembly (HDA) is sealed at the factory. Air circulates within the HDA through a nonreplaceable filter to maintain a contamination-free HDA environment.
Refer to Figure 2 for an exploded view of the drive. This exploded view is for information only—never disasse mble the HDA and do not attempt to service items in the seal ed enc losure (head s, media, ac tuator, etc.) as this
requires special facilities. The drive contains no replaceable parts. Opening the HDA voids your warranty.
Cheetah 73 drives use a dedicated landing zone at the innermost radius of the media to eliminate the possibility of destroying or degrading data by landing in the data zone. The dri ve automatically goes to the landing
zone when power is removed.
An automatic shipping lock prevents potential damage to the heads and discs that results from movement during shipping and ha ndl ing . T he shi ppi ng lock au toma tic al ly di se nga ges whe n power is applied to the drive and
the head load process begins.
Cheetah 73 drives decode track 0 location data fr om the servo data embedded on each surface to eliminate
mechanical transducer adjustments and related reliability concerns.
A high-performance actuator assembly with a low-inertia, balanced, patented, straight-arm design provides
excellent performance with minimal power dissipation.
6 Cheetah 73 Product Manual, Rev. F
Figure 2. Cheetah 73 family drive

Cheetah 73 Product Manual, Rev. F 7
3.1 Standard features
The Cheetah 73 family has the following standard features:
• Integrated Ultra160 SCSI controller
• Multimode SCSI drivers and receivers—single-ended (SE) and low voltage differential (LVD)
• 16 bit I/O data bus
• Asynchronous and synchronous data transfer protocol (supports Ultra160 transfer rate)
• Firmware downloadable via SCSI interface
• Selectable even byte sector sizes from 512 to 2,064 bytes/sector
• Programmable sector reallocation scheme
• Flawed sector reallocation at format time
• Programmable auto write and read reallocation
• Reallocation of defects on command (post format)
• Enhanced ECC (maximum burst corrections length of 240 bits with a guaranteed burst correction of 233 bits)
• Sealed head and disc assembly
• No preventative maintenance or adjustment required
• Dedicated head landing zone
• Embedded servo design
• Self diagnostics performed when power is applied to the drive
• Zoned bit recording (ZBR)
• Vertical, horizontal, or top down mounting
• Dynamic spindle brake
• 4,096 kbyte data buffer (16,384 kbyte option on LWV and LCV models)
• Hot plug compatibility (Section 9.6.4.2 lists proper host connector needed) for LC and LCV model drives
• Supports SCSI bus fairness
3.2 Media characteristics
The media used on the dr ive has a di ameter of a pproximately 3 .3 in ches (8 4 mm). The alumi num substrat e is
coated with a thin film magneti c mat eria l, overcoated with a propr iet ar y prote ctive layer for improved durability
and environmental protection.
3.3 Performance
• Supports industry standard Ultra160 SCSI interface
• Programmable multi-segmentable cache buffer (see Section 3.1)
• 10,033 RPM spindle. Average latency = 2.99 ms
• Command queuing of up to 64 commands
• Background processing of queue
• Supports start and stop commands (spindle stops spinning)
3.4 Reliability
• 1,200,000 hour MTBF
• LSI circuitry
• Balanced low mass rotary voice coil actuator
• Incorporates industry-standard Self-Monitoring, Analysis and Reporting Technology (S.M.A.R.T.)
• Incorporates Drive Self Test (DST) technology
• 5-year warranty

8 Cheetah 73 Product Manual, Rev. F
3.5 Unformatted and formatted capacities
Formatted capacity depends on the number of spare reallocation sectors reserved and the number of bytes per
sector. The following table shows the standard OEM model capacities:
Formatted
data block size
512 bytes/sector [1] Unformatted
ST173404 088BB992h (73.4 GB) [2] 87.4 GB
Notes.
[1] Sector size selectable at for mat time. Users having the necessar y equip ment may modify the data block
size before issuing a format co mmand and obtain different formatted capa cities than those listed. See
Mode Select Command and Format Command in the SCSI Interface Product Manual.
[2] User available capac ity depends on spa re reallocation sc heme selected, the numb er of data tracks per
sparing zone, and the number of alternate sectors (LBAs) per sparing zone.
3.6 Programmable drive capacity
Using the Mode Select command, the drive can change its capacity to something less than maximum. See the
SCSI Interface Product Manual. Refer to the Parameter list block descripto r number of blocks field. A value of
zero in the number of blocks field indicates tha t the drive shall not change the c apa ci ty it i s cur r ently form atte d
to have. A number in the number of blocks field that is less than the maximum number of LBAs changes the
total drive capacity to the value in the block descriptor numb er of blocks field. A value greater than the m aximum number of LBAs is rounded down to the maximum capacity.
3.7 Factory installed accessories
OEM Standard drives are shipped with the Cheetah 73 Installation Guide, part number 83329479 and the
Safety and Regulatory Agency Specifications, part number 75789512 (unless otherwise specified). The factory
also ships with the drive a small bag of jumper plugs used for the J2, J5, and J6 option select jumper headers.
3.8 Options (factory instal led)
All customer request ed options are incorporate d during production or packaged at the manufacturin g facility
before shipping. Some of the options available are (not an exhaustive list of possible options):
• Other capacities can be ordered depending on sparing scheme and sector size requested.
• 4 Mbyte optional buffer size.
• Single unit shipping pack. The drive is norm ally shipped in bulk pa ckaging to provide maximum protec tion
against transit damage. Units shipped individually require additional protection as provided by the single unit
shipping pack. Users planning single unit distribution should specify this option.
• The Cheetah 73 Installation Guide , part number 83329479, is usually included with ea ch standard OEM
drive shipped, but extra copies may be ordered.
• The Safety and Regulatory Agency Specifications, par t number 75789512, is usually incl uded with each
standard OEM drive shipped, but extra copies may be ordered.
3.9 Accessories (user installed)
The following accessories are available. All accessories may be installed in the field.
• Single unit shipping pack.

Cheetah 73 Product Manual, Rev. F 9
4.0 Performance characteristics
4.1 Internal drive characteristics (transparent to user)
ST173404
Drive capacity 73.4 GByte (formatted, rounded off values)
Read/write heads 24
Bytes/track 215,248 Bytes (average, rounded off values)
Bytes/surface 3,035 Mbytes (unformatted, rounded off values)
Tracks/surface (total) 14,100 Tracks (user accessible)
Tracks/inch 18,145 TPI
Peak bits/inch 334 KBPI
Internal data rate 280-427 Mbits/sec (variable with zone)
Disc rotational speed 10,033 r/min (+
Average rotational latency 2.99 msec
4.2 SCSI performance characteristics (visible to user)
The values given in Section 4.2.1 apply to all models of the Cheetah 73 family unless otherwi se specified.
Refer to Section 9.10 and to the SCSI Interface Product Manual for additional timing details.
4.2.1 Access time [5]
Including controller overhead
(without disconnect) [1] [3]
Drive level Drive level
Read Write Read Write
Average – Typical [2] 6.05 6.55 5.85 6.35
Single Track – T ypical [2] 0.8 1.1 0.6 0.9
Full Stroke – Typical [2] 14.2 15.2 14.0 15.0
0.5%)
Not Including controller overhead
(without disconnect) [1] [3]
msec msec
4.2.2 Format command execution time (minutes) [1]
ST173404
Maximum (with verify) 240
Maximum (no verify) 120
4.2.3 Generalized performance characteristics
Minimum sector interleave 1 to 1
Data buffer transfer rate to/from disc media (one 512-byte sector):
Min. [3]* 26.7 MByte/sec
Avg. [3] 33.0 MByte/sec
Max. [3] 40.2 MByte/sec
SCSI interface data transfer rate (asynchronous):
Maximum instantaneous one byte wide 5.0 Mbytes/sec [4]
Maximum instantaneous two bytes wide 10.0 Mbytes/sec [4]
Synchronous formatted transfer rate
Ultra2 SCSI Ultra160 SCSI
In low voltage differential (LVD) interface mode 5.0 to 80 Mbytes/sec 5.0 to 160 Mbytes/sec

10 Cheetah 73 Product Manual, Rev. F
Sector Sizes:
Default 512 byte user data blocks
Variable 512 to 2,064 bytes per sector in even number of bytes per sector.
If n (number of bytes per sector) is odd, then n-1 will be used.
Read/write consecutive sectors on a track Yes
Flaw reallocation performance impact (for flaws reallocated at format time using
the spare sectors per sparing zone reallocation scheme.)
Average rotational latency 2.99 msec
Notes for Section 4.2.
[1] Execution time m easured from receipt of the last Byte of the Command Descriptor Block (CDB) to th e
request for a Status Byte Tr ansfer to the Initiator (excluding connect/disconnect).
[2] Typical access tim es are m easured und er nomina l conditi ons of tem perature, voltage, and hor izontal o ri-
entation as measured on a representative sample of drives.
[3] Assumes no errors and no sector has been relocated.
[4] Assumes system ability to support the rates listed and no cable loss.
[5] Access time = controller overhead + average seek time.
Access to data = controller overhead + average seek time + latency time.
4.3 Start/stop time
After DC power at no minal voltage h as been appl ied, the d r ive becom es rea dy withi n 30 sec onds if the Mo tor
Start Opti on is disabled (i.e. the motor star ts as soon as the power has bee n applied). If a recoverable error
condition is detected during the start sequence, the drive executes a recovery procedure which may cause the
time to become rea dy to exceed 30 seconds. Dur ing spin up to ready time the dr ive responds to s ome commands over the SCSI interface in less than 3 seconds after application of power. Stop time is less than 30 seconds from removal of DC power.
If the Motor Star t Option is en abled, the inter nal cont roller accep ts the comm ands list ed in the SCSI Interface
Product Manual less than 3 seconds aft er DC power has been appli ed. After the Motor Start Co mmand has
been received the d rive becomes ready for nor mal opera tions withi n 30 seco nds typical ly (excluding an error
recovery procedure). The Mo tor Start Comm and can also be used to comm and the drive to stop the spindle
(see SCSI Interface Product Manual).
Negligible
There is no power control switch on the drive.
4.4 Prefetch/multi-segmented cache control
The drive provides prefetch (read look-ahead) and multi-segmented cache control algorithms that in many
cases can enhance system performance. “Cache” as used herein refers to the drive buffer storage space when
it is used in cache operations. To select prefetch and cache features the host sends the Mode Select command
with the proper values in the applicable bytes in Mode Page 08h (see SCSI Interface Product Manual). Prefetch
and cache operation are independe nt features from the stan dpoi nt tha t eac h is enabled and di sa bled indep endently via the Mode Selec t c omm and . However, in actual operation the prefetch feature overlaps cache operation somewhat as is noted in Section 4.5.1 and 4.5.2.
All default cache and prefetch Mode pa rameter values (Mode Page 08h) for standard OEM versions of this
drive family are given in Tables 8.
4.5 Cache operation
In general, 3,600 Kbytes (1 4,399 kbytes of the 16,384 k bytes on units with this op tion) of the physical buffer
space in the drive can be used as storage spac e for cache operations. The buffer can be divi ded into logical
segments (Mode Select Page 08h, byte 13) from which data is read and to which data is written. The drive supports a maximum of 64 cache segments.The drive maintains a table of logical block disk medium addresses of
the data stored in each segme nt of the buffer. If cache operation is enabled (RCD bit = 0 in Mode Page 08h,
byte 2, bit 0. See SCSI Interface Product Manual), data requested by the host with a Read command is
retrieved from the buffer (if it is there), before any disc access is initiated. If cache operation is not enabled, the

Cheetah 73 Product Manual, Rev. F 11
buffer (still segmented with required number of segments) is still used, but only as circular buffer segments during disc medium read op eration s (disreg ardin g Prefetch opera tion for the moment ). Th at is, the dr ive does not
check in the buffer segments for the reque sted read data, but goe s directly to the medium to retr ieve it. The
retrieved data merely passes through s ome buffer segment o n the way to the host. On a c ache miss, al l data
transfers to the host are in accordance with buffer-full ratio rules. On a cache hit the drive ignores the buffer-full
ratio rules. See explanations asso ciated w ith M ode pa ge 02 h (d isc onne ct /re co nne ct c ont ro l) in the SCSI Inter-
face Product Manual.
The following is a simplified description of a read operation with cache operation enabled:
Case A -
1. Drive transfers to the initiator the first LB requested plus all subs equ ent co nti guo us LBs that ar e alrea dy in
2. When the requested LB is reached that is not in any cache segment, the drive fetches it and any remaining
3. If the prefetch feature is enabled, refer to Section 4.5.2 for operation from this point.
Case B -
1. The drive fetches the requested LBs from the disc and transfers them into a segment, and from there to the
2. If the prefetch feature is enabled, refer to Section 4.5.2 for operation from this point.
Each buffer segment is actually a s elf-contained circular storage (wrap-around oc curs), the le ngth of which is
an integer number of disc medium sectors. The wrap-around capability of the individual segments greatly
enhances the buffer’s over all performance as a cache storage, allowing a wide range of user selectable configurations, which includes their use in the prefetch operation (if enabled), even when cache operation is disabled
(see Section 4.5.2) . The number of se gments is set dynam ically by the drive and can not be set by the host.
The size in Kbytes of each segme n t is no t r eported by the Mode Sen se co mma nd pa ge 0 8h, bytes 14 a nd 15 .
The value 0XFFFF is always repor ted. If a size specificatio n is sent by the host in a Mode Select command
(bytes 14 and 15) no new segment size is set up by the drive, and if the STRICT bit in Mode page 00h (byte 2,
bit 1) is set to one, the drive resp onds as it does for any attempt to change unchang eable parameters (see
SCSI Interface Product Manual). The drive supports operation of any integer number of segments from 1 to 64.
Default is three segments.
A Read command is received and the first logical block (LB) is already in cache:
the cache. This data may be in multiple segments.
requested LBs from the disc an d puts them in a s egment of the cache. The dr ive transfers the remainin g
requested LBs from the ca che to t he host in accorda nce with the disconn ect/r econn ect speci fication mentioned above.
A Read command requests data, the first LB of which is not in any segment of the cache:
host in accordance with the disconnect/reconnect specification referred to in case A.
4.5.1 Caching write data
Write caching is a wr ite op eration by the dr ive that makes use of a drive buffer storage area where the data t o
be written to the medium is stored in one or more segments while the drive performs the write command.
If read caching is enabled (RCD=0), then data written to the medium is retained in the cache to be made available for future read cache hits. The s ame buffer space and segme ntat ion is u sed a s set up for read func tions.
The buffer segmentation scheme is set up or changed independently, having nothing to do with the state of
RCD. When a write co mmand is issued, if RCD=0 , the cache is first checked to see if any logical blocks that
are to be writte n are already stored in the cach e from a previous read or write comman d. If there are, the
respective cache segments are cleared. The new data is cached for subsequent Read commands.
If the number of wri te data lo gical blocks exceeds t he size of the segment b eing w ritten i nto, when the end of
the segment is reached, the data is written into the beginning of the same cache segment, overwriting the data
that was written there at the beginning of the operation. However, the drive does not overwrite data that has not
yet been written to the medium.
If write caching is enabled (WCE=1), then the drive may return GOOD status on a write command after the
data has been transferred into the cache, but before the data has been written to the medium. If an error occurs
while writing the data to the medium, and GOOD status has already been returned, a deferred error will be
generated.
The Synchronize Cache command may be used to force the drive to write all cached write data to the medium.
Upon completion of a Synchronize Cache command, all data received from previous write commands will have
been written to the medium.

12 Cheetah 73 Product Manual, Rev. F
Tables 8 show Mode default settings for the drives.
4.5.2 Prefetch operation
If the Prefetch feature is enabled, data in conti guous lo gical blocks on the disc i mmedia tely b eyond that which
was requested by a Read comman d can be retri eved and stored in the buffer for immediate transfer from the
buffer to the host on subsequent Read commands that request those logical blocks (this is true even if cache
operation is disabled). Though th e prefetch operation us es the buffer as a cache, findin g the r equ es ted data i n
the buffer is a prefetch hit, not a cache operation hit. Prefetch is enabled using Mode Select page 08h, byte 12,
bit 5 (Disable Read Ahead - DRA bit). DRA bit = 0 enables prefetch. Since data that is prefetched replaces data
already in some buffer segment(s), the host can limit the am ount of prefetch data to optimize s ystem performance. The max prefetch field (bytes 8 and 9) limits the amount of prefetch. The drive does not use the
Prefetch Ceiling field (bytes 10 and 11).
During a prefetch operation, the dri ve crosses a cyl inder bounda r y to fetch more data o nly if the Discontinuity
(DISC) bit is set to one in bit 4 of byte 2 of Mode parameters page 08h.
Whenever prefetch (read look-ahead) is enabled ( enabled by DRA = 0), it opera tes und er the co ntrol of ARLA
(Adaptive Read Look-Ahead). If the host uses software interleave, ARLA enables prefetch of contiguous blocks
from the disc when it sense s that a prefetch hit will l ikely occur, even if two consecutive read operations were
not for physically contiguous blocks of data (e.g. “software interleave”). ARLA disables prefetch when it decides
that a prefetch hit will not likely occur. If the host is not using softwa re interleave, and if two sequential read
operations are not for contiguous blocks of data , ARL A dis ables pre fetch, but as long as s equ enti al read oper ations request contiguous blocks of data, ARLA keeps prefetch enabled.

Cheetah 73 Product Manual, Rev. F 13
5.0 Reliability specifications
The following reliability spe cifications assume correct hos t/drive operational interface, including all interface
timings, power supply voltages, environmental requirements and drive mounting constraints (see Section 8.4).
Seek Errors
Less than 10 in 10
Read Error Rates [1]
Recovered Data Less than 10 errors in 10
Unrecovered Data Less than 1 sector in 10
Miscorrected Data Less than 1 sector in 10
MTBF 1,200,000 hours
Service Life 5 years
Preventive Maintenance None required
Note.
[1] Error rate specified with automatic retries and data correction with ECC enabled and all flaws reallocated.
5.1 Error rates
The error rates stated in this specification assume the following:
• The drive is operated per this specification using DC power as defined in this manual (see Section 6.2).
• The drive has been formatted with the SCSI Format command.
• Errors caused by media d efects or hos t system failures are exclude d from er ror rate comp utat ions. Refer to
Section 3.2, “Media Characteristics.”
• Assume random data.
8
seeks
12
bits transferred (OEM default settings)
15
bits transferred (OEM default settings)
21
bits transferred
5.1.1 Environmental interference
When evaluating systems operatio n under condit ions of Ele ctromagnetic Interference (EMI), the performanc e
of the drive within the s ystem shall b e consi dered acce ptable if the dr ive does not g enerate an unre coverable
condition.
An unrecoverable error, or unrecoverable condition, is defined as one that:
• Is not detected and corrected by the drive itself;
• Is not capable of being detected from the error or fault status provided through the drive or SCSI interface; or
• Is not capable of being recovered by normal dr ive or sys tem rec overy pro cedur es wit hou t opera tor inte rven-
tion.
5.1.2 Read errors
Before determination or measurement of read error rates:
• The data that is to be used for measurement of read error rates must be verified as being written correctly on
the media.
• All media defect induced errors must be excluded from error rate calculations.
5.1.3 Write errors
Write errors can occur as a result of media defects, environmental interference, or equipment malfunction.
Therefore, write errors are not predictable as a function of the number of bits passed.
If an unrecoverable write error occurs beca use of a n equipm ent mal functi on in the dr ive, the error is classi fied
as a failure affecting MTBF. Unrecoverable write errors are those which cannot be corrected within two
attempts at writing the record with a read verify after each attempt (excluding media defects).
5.1.4 Seek errors
A seek error is de fin ed as a failure o f t he drive to position the h eads to the addressed track. Ther e sh all b e n o
more than ten recoverable seek errors in 10
8
physical seek operations. After detecting an init ia l se ek err or, the
drive automatically per forms an error recover y process. If the error r ecovery process fails, a seek posi tioning
error (15h) is repor ted wit h a Medium err or (3h) or Har dware error (4h) repo rt ed in the Sense Key. This is an

14 Cheetah 73 Product Manual, Rev. F
unrecoverable seek error. Unrecoverable seek errors are classified as failures for MTBF calculatio ns. Refer to
the SCSI Interface Product Manual for Request Sense information.
5.2 Reliability and service
You can enhance the reliability of Cheetah 73 disc drives by ensuring that the drive receives adequate cooling.
Section 6.0 provides temp erature measu rements a nd other in formation that m ay be used to enha nce the service life of the drive. Section 8.3.1 provides recommended air-flow information.
5.2.1 Mean time between failure
The production d isc drive shall achieve an MTBF o f 1,200,000 hours when operated in an environment that
ensures the case temperatures specified in Section 6.4.1, T able 3 are not exceeded. Short-term excursions up
to the specification limits of the operating environment will not affect MTBF performance. Continual or sustained operation at case temperatures above the values shown in Table 3 may degrade product reliability.
The MTBF target is specified as device power-on hours (POH) for all drives in service per failure.
MTBF per measurement period =
Estimated power-on operating hours in the per i od
Number of drive failures in the period
Estimated power-on operation hours means power-up hours per disc drive times the total number of disc drives
in servic e. Each dis c dr ive shal l have accumulated a t leas t nine month s of o peration. Data sha ll be calc ulated
on a rolling average base for a minimum period of six months.
MTBF is based on the following assumptions:
• 8,760 power-on hours per year.
• 250 average on/off cycles per year.
• Operations at nominal voltages.
• Systems will provide adequate cooling to ensure the case temperatures specified in Section 6.4.1 are not
exceeded.
Drive failure means any stoppage or substandard performance caused by drive malfunction.
A S.M.A.R.T. predictive failure indicates that the dr ive is dete riora ting to an imm inent failure and is consi dere d
an MTBF hit.
5.2.2 Field failure rate vs time
The expected field failure rate is listed below. Drive utilization will vary. An estimated range of utilization is:
• 720 power-on hours (POH) per month.
• 250 on/off cycles per year.
• Read/seek/write operation 90% of power-on hours.
• Systems will provide adequate cooling to ensure the case temperatures specified in Section 6.4.1 are not
exceeded.
Month 1 2,500 PPM
Month 2 1,600 PPM
Month 3 1,200 PPM
Month 4 1,000 PPM
Month 5 890 PPM
Month 6 840 PPM
Month 7 805 PPM
Failure rate is calculated as follows:
• No system-induced failures are counted
• Based on 1,200,000 MTBF and 720 power-on hours per month
• Month 1’s rate includes a 300 PPM installation failure
5.2.3 Preventive maintenance
No routine scheduled preventive maintenance shall be required.

Cheetah 73 Product Manual, Rev. F 15
5.2.4 Service life
The drive shall have a useful ser vic e life of five years. Depot repair or repl acement of major parts is per m itted
during the lifetime (see Section 5.2.5).
5.2.5 Service philosophy
Special equipmen t is requir ed to repair the drive HDA. In order to achi eve the above service life, repairs must
be performed only at a proper ly equip ped and staffed ser vice and repair facility. Troubleshooting and repa ir of
PCBs in the field i s not recommended, be cause of the extensive diagnostic eq uipment required for effective
servicing. Also, there are no spare parts available for this drive. Drive warranty is voided if the HDA is opened.
5.2.6 Service tools
No special tools are requi red for site instal lat ion or recomm ended for site maintenance. Refer to Section 5.2.5.
The depot repair philosophy of the drive precludes the necessity for special tools. Field repair of the drive is not
practical since there are no user purchasable parts in the drive.
5.2.7 Hot plugging Cheetah 73 disc drives
The ANSI SPI-3 (T10 /1302D) documen t defines the physical requi rements for removal and inser tion of SCS I
devices on the SCSI bus. Four cases are addressed. The cases are differentiated by the state of the SCSI bus
when the removal or insertion occurs.
Case 1 - All bus devices powered off during removal or insertion
Case 2 - RST signal asserted continuously during removal or insertion
Case 3 - Current I/O processes not allowed during insertion or removal
Case 4 - Current I/O process allowed during insertion or removal, except on the device being changed
Seagate Cheetah 73 disc dr ives support all four hot plugging cases. Provision shall be made by the syste m
such that a device being inserted ma kes power and ground connecti ons pri or to the co nnection o f any device
signal contact to the bus. A device being re moved shall maintain power and groun d connecti ons after the disconnection of any device signal contact from the bus (see SFF-8046, SCA-2 specification).
It is the responsibility of the systems integrator to assure that no hazards from temperature, energy, voltage, or
ESD potential are presented during the hot connect/disconnect operation.
All I/O processe s for the SCSI device bein g inser ted or removed shall b e quiescent. A ll SCSI devices on th e
bus shall have receivers that conform to the SPI-2 standard.
If the device being hot plugged uses single-ended (SE) drivers and the bus is currently operating in low voltage
differential (LVD) mode, then all I/O processes for all devices on the bus must be completed , and the bus quiesced, before attempting to hot plug. Following the insertion of the newly installed device, the SCSI host
adapter must issue a Bus Res et, followed by a synchronous transfer negotiation. Failure to perform the SCSI
Bus Reset could result in erroneous bus operations.
The SCSI bus termination and termination power source shall be external to the device being inserted or
removed.
End users should not mix devices with high voltage differential (H VD) drivers and receivers and devices wit h
SE, LVD, or multimode drivers and receivers on the s ame SCSI bus since the commo n mode voltages in the
HVD environment may not be controlled to safe levels for SE and LVD devices (see ANSI SPI-2).
The disc drive spindle must co me to a complete st op prior to comple tely removing the dr ive from the cabinet
chassis. Use of the Stop Spin dle co mmand o r partial with drawal of the dr ive, enough to be dis connec ted fro m
the power source, prior to removal are methods for insuring that this requirement is met. During drive insertion,
care should be taken to avoid exceeding the limits stated in Section 6.4.4, "Shock and vibration" in this manual.
5.2.8 S.M.A.R.T.
S.M.A.R.T. is an acronym for Self-Monitori ng Analys is and Rep or ting Technology. This technology is intended
to recognize conditions that indi cate a dri ve failure and is designed to provide suffic ient war ning of a failure to
allow data back-up before an actual failure occurs.

16 Cheetah 73 Product Manual, Rev. F
Note.
The firmware will monitor specific attributes for degradation over time but cannot predict instantaneous
drive failures.
Each attribute ha s bee n s el ec ted to mo nit or a sp ec ifi c s et of failure c ond itio n s in the operating performa nce of
the drive, and the thresholds are optimized to minimize “false” and “failed” predictions.
Controlling S.M.A.R.T.
The operating mode of S.M.A.R.T. is controlled by the DEXCPT bit and the PERF bi t of the “Informational
Exceptions Control Mode Page” (1Ch). Th e DEXCPT bit is us ed to enable or disable the S.M.A.R.T. process.
Setting the DEXCPT bit will disable all S.M.A.R.T. functions. When enabled, S.M.A.R.T. will collect on-line data
as the drive performs nor m al re ad/wr ite operatio ns. When t he PER F bit is set, th e dr ive is consi dered to be in
“On-line Mode Only” and will not perform off-line functions.
The process of measuring off-line attributes and saving data can be forced by the Rezero Unit command. Forcing S.M.A.R.T. will reset the timer so that the next scheduled interrupt will be two hours.
The drive can be interrogated by the host to determine the time remaining before the next scheduled measurement and data loggi ng process will oc cur. This is accomplished by a log sense command to log page 0x3E .
The purpose is to allow the customer to control when S.M.A.R.T. interruptions occur. As described above, forcing S.M.A.R.T by the Rezero Unit command will reset the timer.
Performance impact
S.M.A.R.T. attribute data will be saved to the disc for the purpose of recreating the events that caused a predictive failure. The drive will measure and save parameters once every two hours subject to an idle per iod on the
SCSI bus. The process of m easuring off-line attr ibute data and saving data to th e disc is u ninterrup table and
the maximum delay is summarized below:
Maximum processing delay
On-line only delay Fully enabled delay
DEXCPT = 0, PERF = 1 DEXCPT = 0, PERF = 0
S.M.A.R.T. delay times 50 milliseconds 300 milliseconds
Reporting control
Reporting i s controlled in the Informational Excep tions Control Page (1Ch). Subj ect to the repor ting method,
the firmware will is su e a 01- 5D0 0 s ense c od e to the hos t. T h e err or c ode is pr eserved through bus resets an d
power cycles.
Determining rate
S.M.A.R.T. monitors the rate at which errors occur and s ignals a pred ictive failure if the rate of degraded er ror
rate increases to an una cc ept able level. To determine rate, error events are logged and compared to the number of total operations for a given attr ibute. The inter val defines the number of operations over which to m easure the rate. The counter that keeps track of the c urrent number of operations is referred to as the I nterval
Counter.
S.M.A.R.T. measures error rate, hence for each attr ibute the occurrence of an error is recorded. A counter
keeps track of the number of errors for the current interval. This counter is referred to as the Failure Counter.
Error rate is simply the number of errors per ope ration. The algorithm that S.M.A.R.T. uses to record rates of
error is to set thresholds for the number of errors and the interval. If the number of errors exceeds the threshold
before the interval expires, then the error rate is cons idered to be u nacceptable. If the numbe r of errors d oes
not exceed the threshold before the interval expires, then the error rate is considered to be acceptable. In either
case, the interval and failure counters are reset and the process starts over.
Predictive failures
S.M.A.R.T. signals predictive failures when the drive is performing unaccep tably for a period o f time. The f ir mware keeps a running count of the number of times the error rate for each attribute is unacceptable. To accomplish this, a counte r is incremen ted whenever the error rate is una cceptable and de cremented ( not to exceed
zero) whenever the error rate is acceptable. Should the counter continually be incremented such that it reaches

Cheetah 73 Product Manual, Rev. F 17
the predictive threshold, a predictive failure is signaled. This counter is referred to as the Failure History
Counter. There is a separate Failure History Counter for each attribute.
5.2.9 Drive Self Test (DST)
Drive Self Test (DST) is a technology designed to recognize drive fault conditions that qualify the drive as a
failed unit. DST validates the functionality of the drive at a system level.
There are two test coverage options implemented in DST:
1. Extended test
2. Short text
The most thorough option is the extended test that performs various tests on the drive and scans every logical
block address (LBA) of the drive. The short test is time-restricted and limited in length—it does not scan the
entire media surface, but does some fundamental tests and scans portions of the media.
If DST encounters an error during either of these tests, it reports a fault condition. If the drive fails the test,
remove it from service and return it to Seagate for service.
5.2.9.1 DST Failure Definition
The drive will present a “diagnostic failed” condition through the self-tests results value of the diagnostic log
page if a functional failure is encountered during DST. The channel and servo parameters are not modified to
test the drive more stringently, and the number of retries are not reduced. All retries and recovery processes
are enabled during the test. If data is recoverable, no failure condition will be reported regardless of the number
of retries required to recover the data.
The following conditions are considered DST failure conditions:
• Seek error after retries are exhausted
• Track-follow error after retries are exhausted
• Read error after retries are exhausted
• Write error after retries are exhausted.
Recovered errors will not be reported as diagnostic failures.
5.2.9.2 Implementation
This section provides all of the information necessary to implement the DST function on this drive.
5.2.9.2.1 State of the drive prior to testing
The drive must be in a ready state before issuing the Send Diagnostic command. There are multiple reasons
why a drive may not be ready, some of which are valid conditions, and not errors. For example, a drive may be
in process of doing a format, or another DST. It is the responsibility of the host application to determine the “not
ready” cause.
While not technically part of DST , a Not Ready condition also qualifies the drive to be returned to Seagate as a
failed drive.
A Drive Not Ready condition is reported by the drive under the following conditions:
• Motor will not spin
• Motor will not lock to speed
• Servo will not lock on track
• Drive cannot read configuration tables from the disc
In these conditions, the drive responds to a Test Unit Ready command with an 02/04/00 or 02/04/03 code.
5.2.9.2.2 Invoking DST
To invoke DST, submit the Send Diagnostic command with the appropriate Function Code (001b for the short
test or 010b for the extended test) in bytes 1, bits 5, 6, and 7. Refer to the Seagate SCSI Interface Manual, Volume 3, part number 75789509 for additional information about invoking DST.
 Loading...
Loading...