

seagate ST11950N, ST11950ND, ST11950WD, ST12550W, ST12550WD Product Manual
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Barracuda 1 and 2 Disc Drive
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST11950N/ND, ST11950W/WD
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST12550N/ND, ST12550W/WD
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Product Manual, Volume 1
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○

○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Barracuda 1 and 2 Disc Drive
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST11950N/ND, ST11950W/WD,
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST12550N/ND, ST12550W/WD
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Product Manual, Volume 1
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○

© 1994 Seagate Technology, Inc. All rights reserved
Publication number: 83327780, Rev. C
November 1994
Seagate®, Seagate Technology®, and the Seagate logo are registered
trademarks of Seagate Technology, Inc. Barracuda™ is a trademark of
Seagate Technology, Inc. Other product names are registered trademarks
or trademarks of their owners.
Seagate reserves the right to change, without notice, product offerings or
specifications. No part of this publication may be reproduced in any form
without written permission from Seagate Technology, Inc.

Revision status summary sheet
Sheets
Revision Date Writer/Engineer Affected
A (preliminary-01) 04/05/93 L. Newman/J. Olson All
A (preliminary-02) 04/20/93 L. Newman/J. Olson All
A (preliminary-03) 05/01/93 L. Newman/J. Olson All
A 05/11/93 L. Newman/J. Olson All
B (preliminary-01) 09/15/93 L. Newman/J. Olson All
B 10/18/93 L. Newman/J. Olson All
C (draft) 10/11/94 L. Newman/J. Olson All
C 11/04/94 L. Newman/J. Olson All
Note. Product Manual 83327780 is Volume 1 of a two-volume
document with the SCSI interface information in the Volume 2
SCSI-2 Interface Product Manual, part number 77738479.


Barracuda 1 and 2 Product Manual, Rev. C v
Contents
1.0 Scope ................................................................................................................................. 1
2.0 Applicable standard and reference documentation ....................................................... 3
2.1 Standards ..................................................................................................................... 3
2.2 Applicable reference documents................................................................................... 3
3.0 General description........................................................................................................... 5
4.0 Standard features.............................................................................................................. 7
4.1 Performance ................................................................................................................. 7
4.1.1 Reliability ............................................................................................................. 7
4.2 Unformatted and formatted capacities .......................................................................... 8
4.3 Options ......................................................................................................................... 8
4.4 Installation..................................................................................................................... 9
5.0 Performance characteristics ............................................................................................ 11
5.1 Internal drive characteristics ......................................................................................... 11
5.2 SCSI seek performance characteristics ........................................................................ 11
5.2.1 Seek time ............................................................................................................ 13
5.2.2 Format drive command execution time................................................................ 13
5.3 General performance characteristics ............................................................................ 14
5.4 Start/stop time............................................................................................................... 14
5.5 Prefetch/multi-segmented cache control ....................................................................... 15
5.5.1 Adaptive read lookahead..................................................................................... 16
5.6 Caching write data ........................................................................................................ 16
5.7 Synchronized spindle operation .................................................................................... 17
6.0 Reliability specifications................................................................................................... 21
6.1 Error rates..................................................................................................................... 21
6.1.1 Environmental interference.................................................................................. 21
6.1.2 Write errors ......................................................................................................... 21
6.1.3 Seek errors ......................................................................................................... 22
6.2 Reliability and service ................................................................................................... 22
6.2.1 Mean time between failures (MTBF).................................................................... 22
6.2.2 Air flow ................................................................................................................ 22
6.2.3 Preventive maintenance ...................................................................................... 28
6.2.4 Service life........................................................................................................... 28
6.2.5 Service philosophy .............................................................................................. 28
6.2.6 Installation ........................................................................................................... 28
6.2.7 Service tools........................................................................................................ 28
6.2.8 Hot plugging Barracuda 1 and 2 disc drives ........................................................ 28

vi Barracuda 1 and 2 Product Manual, Rev. C
7.0 Physical/electrical specifications ................................................................................... 31
7.1 AC power requirements ............................................................................................ 31
7.2 DC power requirements ............................................................................................ 31
7.2.1 Conducted noise immunity ............................................................................ 33
7.2.2 Power sequencing......................................................................................... 33
7.2.3 12V current profile ......................................................................................... 34
7.3 Heat/power dissipation.............................................................................................. 35
7.4 Environmental limits.................................................................................................. 35
7.4.1 Temperature.................................................................................................. 35
7.4.2 Relative humidity ........................................................................................... 35
7.4.3 Effective altitude (sea level)........................................................................... 36
7.4.4 Shock and vibration ....................................................................................... 36
7.4.5 Air cleanliness ............................................................................................... 37
7.4.6 Acoustics....................................................................................................... 37
7.5 Electromagnetic compatibility.................................................................................... 37
7.6 Mechanical specifications ......................................................................................... 38
7.6.1 Drive orientation ............................................................................................ 40
7.6.2 Cooling .......................................................................................................... 40
8.0 Media characteristics ...................................................................................................... 41
8.1 Media description...................................................................................................... 41
9.0 Defect and error management ........................................................................................ 43
9.1 Defects and errors .................................................................................................... 43
10.0 Option/configuration headers......................................................................................... 45
10.1 Drive ID/option select headers .................................................................................. 45
10.1.1 ST11950N/ND and ST12550N/ND configuration ........................................... 45
10.1.2 ST11950W/WD and ST12550W/WD configuration ........................................ 48
10.2 Synchronized spindles interface ............................................................................... 50
10.2.1 Electrical description...................................................................................... 50
10.3 Grounding................................................................................................................. 52
11.0 Interface requirements .................................................................................................... 53
11.1 General description................................................................................................... 53
11.2 SCSI interface messages supported......................................................................... 53
11.3 SCSI interface commands supported........................................................................ 54
11.3.1 Inquiry data.................................................................................................... 56
11.3.2 Mode sense data ........................................................................................... 56
11.4 SCSI bus conditions and miscellaneous features supported..................................... 61
11.5 Synchronous data transfer........................................................................................ 62

Barracuda 1 and 2 Product Manual, Rev. C vii
11.5.1 Synchronous data transfer periods supported .............................................. 62
11.5.2 REQ/ACK offset............................................................................................ 63
11.6 DC cable and connector ........................................................................................... 63
11.7 SCSI physical interface............................................................................................. 63
11.7.1 Physical characteristics ................................................................................ 64
11.7.2 Connector requirements ............................................................................... 65
11.7.3 Electrical description..................................................................................... 66
11.8 SCSI non-wide physical interface ............................................................................. 70
11.9 SCSI wide physical interface..................................................................................... 73
11.10Disc drive SCSI timing .............................................................................................. 76
Index.......................................................................................................................................... 79
Figures
1 Barracuda 1 and 2 family disc drives ................................................................................ 1
2 Barracuda disc drive (exploded view) ............................................................................... 5
3 OEM interruptible thermal compensation implementation .................................................12
4 Synchronized drive interconnect diagram ......................................................................... 17
5 Synchronized reference signal characteristics .................................................................. 18
6 Air-flow pattern .................................................................................................................. 23
7 TYFX temperature measurement locations....................................................................... 24
8 UYFX temperature measurement locations ...................................................................... 25
9 TYGX temperature measurement locations ......................................................................26
10 PYGX temperature measurement locations ...................................................................... 27
11 Temperature measurement location .................................................................................27
12 Barracuda 1 and 2 drives typical +12V current profiles ..................................................... 34
13 Mounting configuration dimensions for N/ND drives.......................................................... 38
14 Mounting configuration dimensions for W/WD drives ........................................................ 39
15 Recommended mounting .................................................................................................. 40
16 ST11950N/ND and ST12550N/ND physical interface ....................................................... 45
17 ST11950N/ND and ST12550N/ND jumper connectors ..................................................... 46
18 ST11950W/WD and ST12550W/WD physical interface .................................................... 48
19 ST11950W/WD and ST12550W/WD jumper connectors .................................................. 48
20 SCSI reference index signal driver/receiver combination .................................................. 50
21 ST11950N/ND and ST12550N/ND configuration select header specification.................... 51
22 ST11950W/WD and ST12550W/WD configuration select header specification ................ 51
23 ST11950N/ND and ST12550N/ND physical interface ....................................................... 63
24 ST11950W/WD and ST12550W/WD physical interface .................................................... 64

viii Barracuda 1 and 2 Product Manual, Rev. C
25 Single-ended transmitters and receivers...........................................................................67
26 Typical differential I/O line transmitters/receivers and terminators .................................... 68
27 Non-shielded SCSI device connector................................................................................70
28 Wide SCSI device connector ............................................................................................73
Tables
1 DC power requirements for ST11950N/ND and ST12550N/ND drives ............................. 31
2 DC power requirements for ST11950W/WD and ST12550W/WD drives .......................... 32
3 SCSI messages supported ............................................................................................... 53
4 Supported commands.......................................................................................................54
5 Barracuda 1 and 2 family drive inquiry data ...................................................................... 56
6 Mode Sense data, ST11950 default values (SCSI-1 implementation)...............................57
7 Mode Sense data, ST11950 default values (SCSI-2 implementation)...............................58
8 Mode Sense data, ST12550 default values (SCSI-1 implementation)...............................59
9 Mode Sense data, ST12550 default values (SCSI-2 implementation)...............................60
10 SCSI bus conditions and other miscellaneous features ....................................................61
11 Synchronous data transfer periods for ST11950N/ND and ST12550N/ND drives............. 62
12 Synchronous data transfer periods for ST11950W/WD and ST12550W/WD drives.......... 62
13 Single-ended cable pin assignments (non-shielded connector)
for ST11950N and ST12550N drives ................................................................................ 71
14 Differential cable pin assignments (non-shielded connector)
for ST11950ND and ST12550ND drives ........................................................................... 72
15 Single-ended contact assignments (P cable) for ST11950W and ST12550W drives ........ 74
16 Single-ended contact assignments (P cable) for ST11950WD and ST12550WD drives ...75
17 Disc drive SCSI timing ...................................................................................................... 76
Barracuda 1 and 2 Product Manual, Rev. C 1
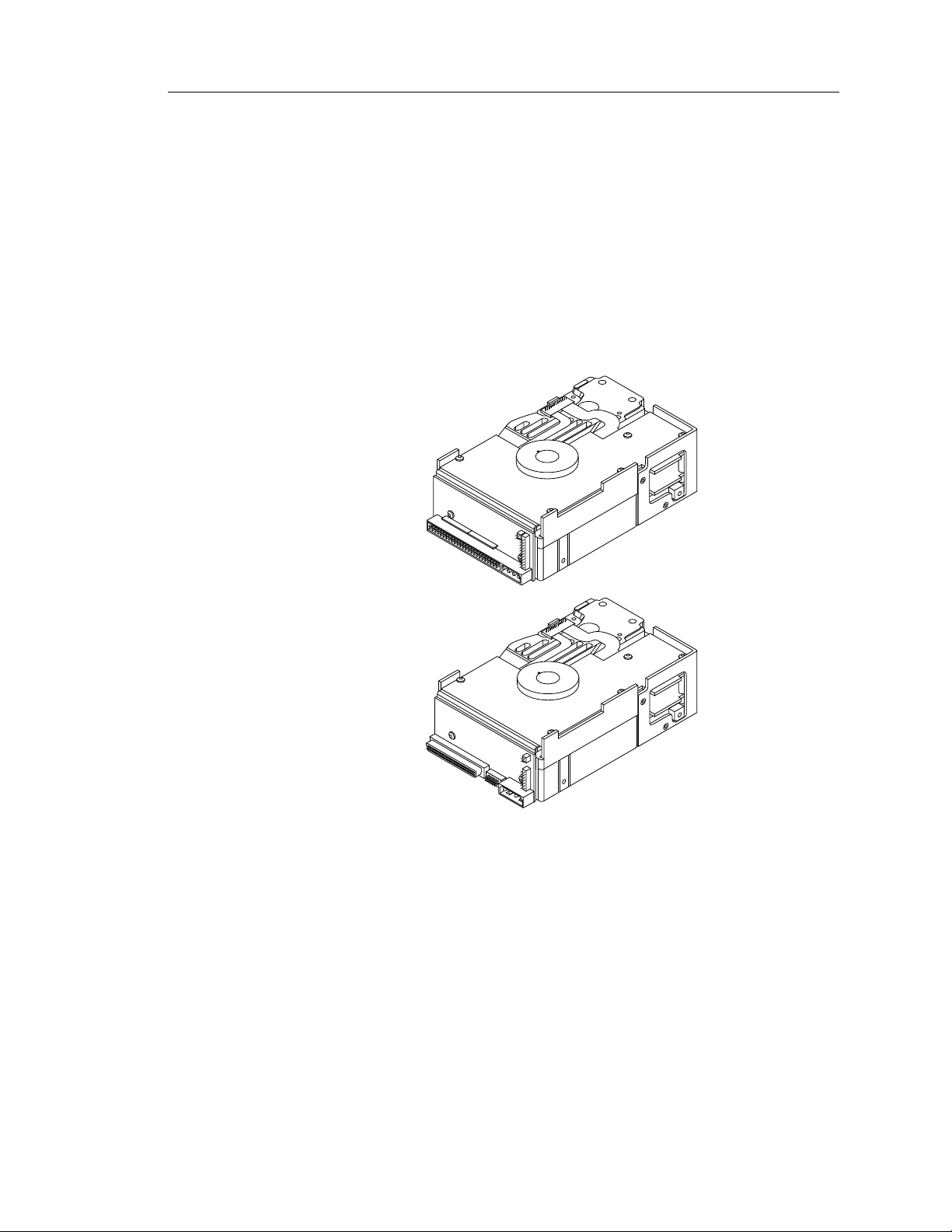
N/ND type
W/WD type
1.0 Scope
This manual describes Seagate Technology®, Inc. Barracuda™ 1 and 2
disc drives.
Barracuda drives support the small computer system interface-2 (SCSI-2)
as described in the ANSI SCSI and SCSI-2 interface specifications to the
extent desc ribed in this manual. The
(part number 77738479) describes general SCSI interface characteristics
of this and other families of Seagate drives.
ST11950N/ND and ST11950W/WD drives are classified as Barracuda 1
family drives. ST12550N/ND and ST12550W/WD drives are classified as
Barracuda 2 family drives.
SCSI-2 Interface Product Manual
Figure 1. Barracuda 1 and 2 family disc drives

2 Barracuda 1 and 2 Product Manual, Rev. C

Barracuda 1 and 2 Product Manual, Rev. C 3
2.0 Applicable standard and
reference documentation
Seagate takes all reasonable steps to ensure that its products are certifiable
to currently accepted standards. Typical applications of these disc drives
include customer packaging and subsystem design.
Safety agencies conditionally certify component assemblies, such as the
Barracuda disc drive, based on their final acceptability in the end-use
product. The subsystem designer is responsible for meeting these conditions of acceptability in obtaining safety/regulatory agency compliance in
their end-use product and certifying where required by law.
2.1 Standards
The Barracuda disc drive is a UL recognized component per UL1950, CSA
certified to CSA C22.2 No. 950-M89, and VDE certified to VDE 0805 and
EN60950.
The Barracuda disc drive is supplied as a component part. It is the responsibility of the subsystem designer to meet EMC/regulatory requirements.
Engineering test characterizations of radiated emissions are available from
the Seagate safety department.
2.2 Applicable reference documents
Barracuda Disc Drive Installation Guide
Seagate part number: 83327770
SCSI-2 Interface Product Manual (volume 2)
Seagate part number: 77738479
ANSI small computer system interface (SCSI) documents
ANSI X3.131-1986 (SCSI-1)
X3T9.2/86-109 Rev. 10H (SCSI-2)
X3T9.2/91-010 Rev. 10 (SCSI-3) Parallel Interface
In case of conflict between this document and any referenced document, this
document takes precedence.

4 Barracuda 1 and 2 Product Manual, Rev. C
Barracuda 1 and 2 Product Manual, Rev. C 5
3.0 General description
Barracuda drives are low-cost, high-performance, random-access storage
devices designed to meet the needs of the original equipment manufacturer
(OEM) marketplace.
The Barracuda drive’s interface supports multiple initiators, disconnect/
reconnect, self-configuring host software, and automatic features that relieve the host from knowing the physical characteristics of the targets (logical
block addressing is used).
The head and disc assembly (HDA) is sealed at the factory. Air circulates
within the HDA through a non-replaceable filter to maintain a contaminationfree HDA environment.
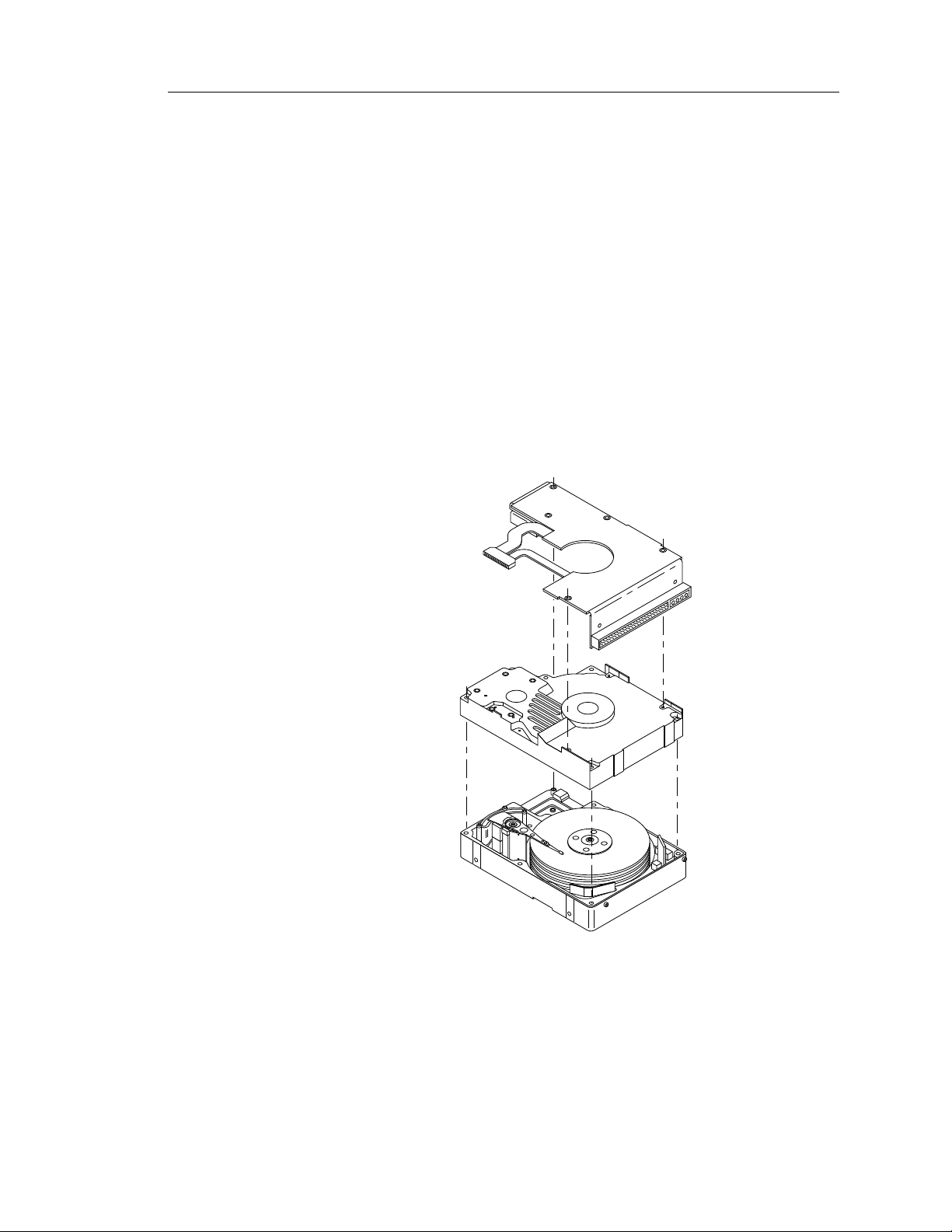
Refer to Figure 2 for an exploded view of the drive. This exploded view is for
information only—never disassemble the HDA and do not attempt to service
items in the sealed enclosure (heads, media, actuator, etc.) as this requires
special facilities. The drive contains no replaceable parts. Opening the HDA
voids your warranty.
Figure 2. Barracuda disc drive (exploded view)

6 Barracuda 1 and 2 Product Manual, Rev. C
Barracuda drives use a dedicated landing zone at the innermost radius of the
media to eliminate the possibility of destroying or degrading data by landing
in the data zone. The drive automatically goes to the landing zone when the
power is removed.
An automatic shipping lock prevents potential damage to the heads and
discs. The shipping lock disengages when power is applied to the drive and
the head load process begins.
Barracuda drives decode track 0 location data from the dedicated servo
surface to eliminate mechanical transducer adjustments and related reliability concerns.
A high-performance actuator assembly with a low-inertia, balanced, patented, straight-arm design provides excellent performance with minimal
power dissipation.

Barracuda 1 and 2 Product Manual, Rev. C 7
4.0 Standard features
Barracuda 1 and 2 drives have the following standard features:
• Integrated SCSI controller
• Single-ended or differential SCSI drivers and receivers
• Asynchronous and synchronous data-transfer protocols
• Firmware downloadable using a SCSI interface
• Selectable sector size from 180 to 4,096 bytes per sector
• Programmable sector-reallocation scheme
• Flawed sector reallocation at format time
• Programmable auto-write and auto-read reallocation
• Reallocation of defects on command (post format)
• 96-bit Reed-Solomon error-correction code
• Sealed head and disc assembly (HDA)
• No preventive maintenance or adjustments required
• Dedicated head-landing zone
• Automatic shipping lock
• Automatic thermal compensation
• Embedded Grey Code track address to eliminate seek errors
• Self-diagnostics performed at power-on
• 1:1 interleave
• Zone bit recording (ZBR)
• Vertical, horizontal, or top-down mounting
• Dynamic spindle brake
• Active termination with removable terminator modules
• Synchronous spindle capability
• 1,024 Kbyte data buffer (N/ND/W models)
• 512 Kbyte data buffer (WD models)
• Low audible noise for office environment
• Low power consumption
4.1 Performance
• Programmable multi-segmentable cache buffer
• 7,200 RPM spindle; average latency = 4.17 msec
• Command queuing of up to 64 commands
• Background processing of queue
• Supports start and stop commands
• Provides synchronized spindle capability
• Adaptive seek velocity; improved seek performance
4.1.1 Reliability
• 500,000 hour MTBF
• LSI circuitry
• Balanced low-mass rotary voice-coil actuator

8 Barracuda 1 and 2 Product Manual, Rev. C
4.2 Unformatted and formatted capacities
Standard OEM models are formatted to have 512-byte sectors.
The ST11950 drive has six (6) spare sectors per cylinder and one (1) spare
cylinder per unit.
The ST12550 drive has nine (9) spare sectors per cylinder and one (1) spare
cylinder per unit.
Formatted Unformatted
ST11950N/ND 1,690 Mbytes 2,030 Mbytes
ST11950W/WD 1,690 Mbytes 2,030 Mbytes
ST12550N/ND 2,139 Mbytes 2,572 Mbytes
ST12550W/WD 2,139 Mbytes 2,572 Mbytes
Users having the necessary equipment may modi fy the data block size
before issuing a format command to obtain different formatted capacities.
User-available capacity also depends on the spare reallocation scheme
selected. See the Mode Select command and the Format command in the
SCSI-2 Interface Product Manual
(part number 77738479).
4.3 Options
The capacities shown in Section 4.2 are normally provided. Other capacities can be or dered de pending on the sparing scheme and sector size
requested.
The following options are incorporated at the time of production or are
available separately.
• Front panel (green lens), part number 70869751
The standard front panel is black plastic. You may order other colors. Each
panel has a single rectangular green LED indicator lens that, when
glowing, indicates the drive is selected.
•
Barracuda Disc Drive Installation Guide,
This manual provides basic installation information for persons not
familiar with the product. It also includes information on obtaining technical support and service for the drive.
• Drive termination for single-ended drives
Removable resistor modules (SIPs) provide ST11950N and ST12550N
drive termination. Permanently mounted active terminator ICs provide
ST11950W and ST12550W drive termination; however, the ICs may be
disabled by removing the Enable Drive Terminator jumper from J4 pins 11
and 12. See Section 11.7.3.3.
• Single-unit shipping pack kit
The drive is shipped in bulk packaging to provide maximum protection
against transit damage. Units shipped individually require additional
protection as provided by the single-unit shipping pack.
• Adapter accessory frame kit, part number 75790701
This kit contains a frame, which allows a 3.5-inch drive to be mounted
in a 5.25-inch drive bay. It includes mounting hardware, front panel with
a green lens, an LED with cable that connects to the remote LED
connector, and installation instructions.
part number 83327770

Barracuda 1 and 2 Product Manual, Rev. C 9
4.4 Installation
For option jumper locations and definitions refer to Section 10.1. Drive default
mode parameters are not normally needed for installation. Refer to
Section 11.3.2 for default mode parameters if you need them.
• Ensure that the SCSI ID of the drive is not the same as the host adapter.
• If multiple devices are on the bus, set the drive’s SCSI ID to one that is not
presently used by other devices on the bus.
• If the drive is the only device on the bus, attach it to the end of the SCSI
bus cable. Internal termination is available on ST11950N, ST11950W,
ST12550N, and ST12550W drives (see Sections 10.1 and 11.7.3.4).
External terminators are required for ST11950ND, ST11950WD,
ST12550ND, and ST12550WD drives. These external terminators must
be provided by the user, systems integrator, or host equipment manufacturer.
• If you attach the drive to a bus that contains other devices, and the new
drive is not attached to the end of the bus, remove termination from the new
drive.
• Set all appropriate option jumpers prior to applying power to the drive. If
you change jumpers after applying power, recycle the drive’s power to
make the new settings effective.
Formatting
• It is not necessary to low-level format this drive. The drive is shipped from
the factory low-level formatted in 512-byte sectors.
• Reformat the drive if:
a. You select a different sector size.
b. You select a different spare-sector allocation scheme.

10 Barracuda 1 and 2 Product Manual, Rev. C

Barracuda 1 and 2 Product Manual, Rev. C 11
5.0 Performance characteristics
This section provides performance-related characteristics and features of
Barracuda 1 and 2 drives.
5.1 Internal drive characteristics
ST11950 ST12550
Drive capacity, Mbytes unformatted 2,030 2,572
Read/write data heads, maximum 15 19
Bytes per track, average 49,768 49,768
Bytes per surface, Mbytes unformatted 135.7 135.7
Cylinders/tracks per surface, 2,706 2,707
user accessible
Tracks per inch 3,047 3,047
Bits per inch 52,187 52,187
Servo heads 1 1
Internal data rate 34.3 to 56.5 34.3 to 56.5
Mbits/sec, variable with zone
Disc rotation speed 7,200 ± 0.5% 7,200 ± 0.5%
Average rotational latency, msec 4.17 4.17
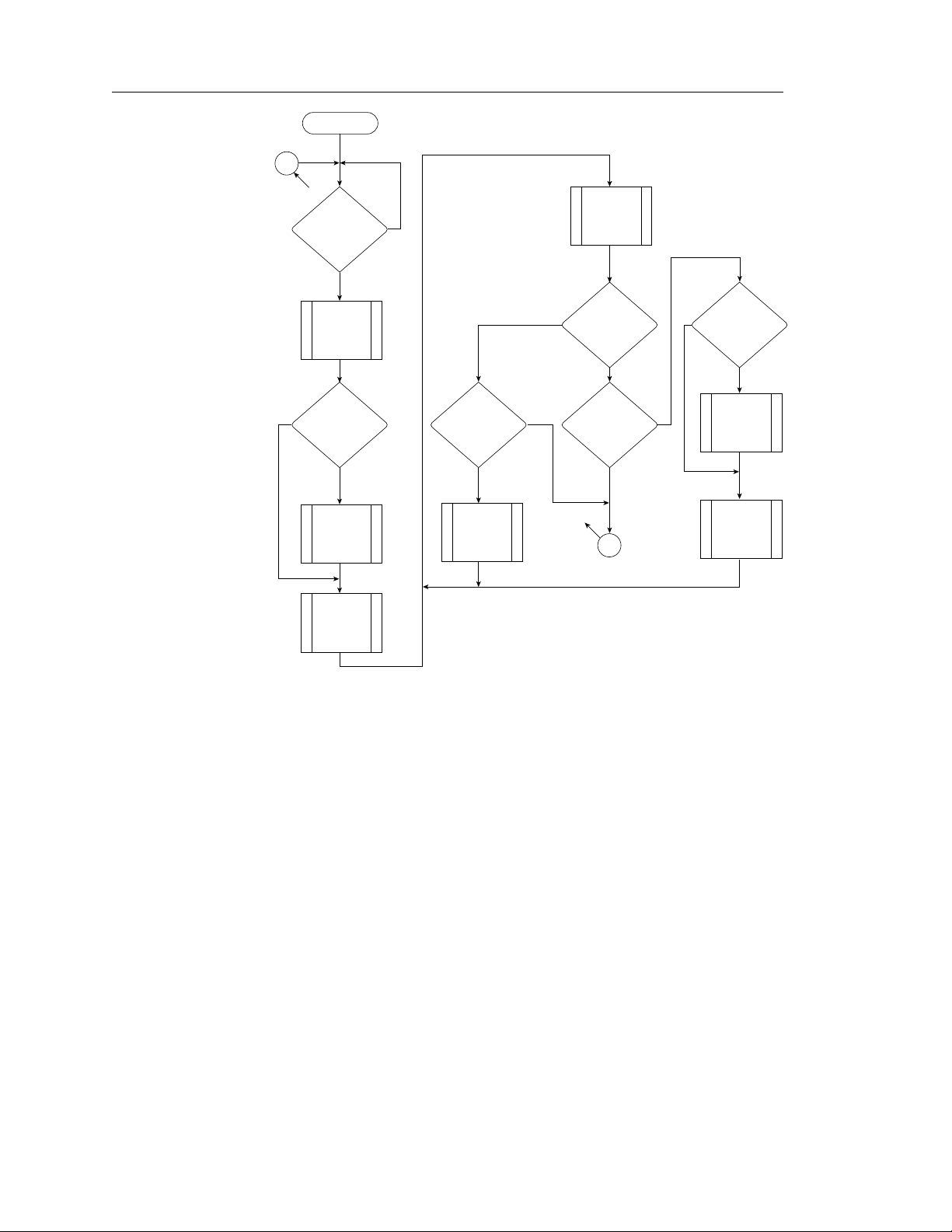
5.2 SCSI seek performance characteristics
All performance characteristics assume that automatic adaptive thermal
compensation is not in process when the drive receives the SCSI command.
Automatic adaptive thermal compensation will not interrupt an active SCSI
command. If adaptive thermal compensation is in process when a SCSI
command is received, the command is queued until compensation
completes. When compensation completes for the head, the first queued
SCSI command executes, and the drive continues compensation for the
remaining head(s).
The above procedure continues until compensation for all heads has
completed, or until 10 minutes have elapsed. The drive initiates an automatic
adaptive thermal compensation cycle once on power-up before completing
its initialization sequence, once after 1 minute from the end of initialization,
and then once approximately every 10 minutes. Automatic thermal
compensation occurs at other times but should be transparent to the user
(e.g., during format, at Re-Zero command, at spindle-up, during read-error
recovery, and during reassign-block functions). You can use the Re-Zero
command to reset the thermal compensation timer to its start to let the host
know when the interruption for thermal compensation will occur.
Refer to Table 17 in Section 11.10 and to the
Manual
(part number 77738479) for additional timing details.
SCSI-2 Interface Product
12 Barracuda 1 and 2 Product Manual, Rev. C
Start
Has
10 min.
timer
expired?
Set
10 minute
timer
Yes
No
Yes
A
Is
SCSI
command in
progress?
No
Complete
Command
Seek to
TCAL cyl
and select
head zero
TCAL
head
Has
target
received a SCSI
command?
No
Yes
All
heads
calibrated?
Yes
A
All
heads
calibrated?
No
Yes
Select
next
head
No
Has
target
received a SCSI
command?
Yes
No
Target
completes
SCSI
command
Seek to
TCAL cyl
and select
next head
Figure 3. OEM interruptible thermal compensation implementation

Barracuda 1 and 2 Product Manual, Rev. C 13
5.2.1 Seek time
Drive including
controller overhead
Drive level (msec) without disconnect (msec)
read write read write
Average typical* 8.0 9.0 9.0 10.0
Single track typical* 0.6 0.9 1.6 1.9
Full stroke typical* 17 19 18.0 20.0
*Typical seek values are measured under nominal conditions of tempera-
ture, voltage, and horizontal orientation on a representative sample of
drives.
5.2.2 Format drive command execution time
≥≥
for
≥ 512-byte sectors
≥≥
ST11950 ST12550
Maximum (with verify) 30 minutes 37 minutes
Maximum (without verify) 18 minutes 22 minutes

14 Barracuda 1 and 2 Product Manual, Rev. C
5.3 General performance characteristics
Minimum sector interleave 1 to 1
Data buffer to/from disc media 512-byte sector
Data transfer rate (≤ 1 sector)
Minimum 4.28 Mbytes/sec*
Maximum 7.06 Mbytes/sec*
Data transfer rate (< 1 track)
Minimum 3.56 Mbytes/sec*
Maximum 5.96 Mbytes/sec*
SCSI interface data
Asynchronous transfer rate * 5.0 Mbytes/sec** (non-wide)
(maximum instantaneous) 10.0 Mbytes/sec*** (wide)
Synchronous transfer rate fast and wide 0.5 to 10 Mbytes/sec
(ST11950N/ND and ST12550N/ND)
Synchronous transfer rate wide 5.0 to 20 Mbytes/sec
(ST11950W/WD and
ST12550W/WD)
Sector sizes
Default 512-byte data blocks
Variable in even-sector sizes 180 to 4,096 bytes
Read/write consecutive sectors on a track Yes
Flaw reallocation performance impact
Spare sectors per track reallocation Negligible
Spare sectors per cylinder reallocation Negligible
Spare tracks per volume reallocation 35 msec (typical)
Overhead time for head switch 0.7 msec
Overhead time for one-track cylinder switch 1.6 msec (typical)
Average rotational latency 4.17 msec
* Rate measured from the start of the first sector transfer to or from the host.
** Assumes system ability to support 5.0 Mtransfers/sec and no cable loss.
***Assumes system ability to support 5.0 Mtransfers/sec and no cable loss.
5.4 Start/stop time
Disabling the Motor Start option causes the motor to start as soon as power
is applied, causing the drive to become ready within 30 seconds after DC
power is applied at nominal voltage. If a recoverable error condition is
detected during the start sequence, the drive executes a recovery procedure
which may cause the drive to become ready in excess of 30 seconds. During
the start sequence the drive responds to some commands over the SCSI
interface. Stop time is less than 30 seconds (maximum) from removal of DC
power.
Enabling the Motor Start option causes the internal controller to accept the
commands listed in the
than 3 seconds after applying DC power. After receiving the Motor Start
command, the drive becomes ready for normal operation within 30 seconds
SCSI-2 Interface Product Manual
(77738479) less

Barracuda 1 and 2 Product Manual, Rev. C 15
(excluding the error recovery procedure). The Motor Start command can
also be used to command the drive to stop the spindle (see the Start/Stop
command information in the
There is no power control switch on the drive.
SCSI-2 Interface Product Manual
).
5.5 Prefetch/multi-segmented cache control
The drive provides a prefetch/multi-segmented cache algorithm, which in
many cases enhances system performance. To select this feature, the host
sends the Mode Select command with the proper values in the applicable
bytes in page 08h (see the
prefetch and cache operation enabled.
Of the 1,024 Kbytes physical buffer space in the ST11950N/ND/W and
ST12550N/ND/W drives, approximately 960 Kbytes can be used as a cache.
Of the 512 Kbytes physical buffer space in the ST11950WD and ST12550WD
drives, approximately 480 Kbytes can be used as a cache. The cache can
be divided into logical segments from which data is read and to which data
is written.
The drive keeps track of the logical block addresses of the data stored in each
segment of the cache. If the cache is enabled (see RCD bit, Table 5.2.1-27
in the
SCSI-2 Interface Product Manual),
read command is retrieved from the cache before any disc access is initiated.
Data in contiguous logical blocks immediately beyond that requested by the
Read command can be retrieved and stored in the cache for immediate
transfer to the initiator on subsequent read commands. This is referred to as
the prefetch operation. Since data that is prefetched may replace data
already in the cache segment, an initiator can limit the amount of prefetch
data to optimize system performance. The drive never prefetches more
sectors than the number specified in bytes 8 and 9 of Mode page 08h (see
the
SCSI-2 Interface Product Manual
Kbytes of the buffer (480 Kbytes for ST11950WD and ST12550WD drives)
are used as a circular buffer for read/writes, with no prefetch operation and
no segmented cache operation.
SCSI-2 Interface Product Manual
data requested by the host with a
). If the cache is not enabled, 960
). Default is
The following is a simplified description of the prefetch/cache operation:
Case A. A read command is received and the first logical block is already in
the cache.
1. The drive transfers to the initiator the first logical block requested plus all
subsequent contiguous logical blocks that are already in the cache. This
data may be in multiple segments.
2. When a requested logical block is reached that is not in any segment,
the drive fetches it and any remaining requested logical block addresses
from the disc and puts them in a segment of the cache. The drive
transfers the remaining requested logical blocks from the cache to the
initiator in accordance with the “buffer-full” ratio specification given in
Mode Select Disconnect/Reconnect parameters, page 02h (see the
SCSI-2 Interface Product Manual
3. The drive prefetches additional logical blocks contiguous to those
transferred in step 2 above and stores them in the segment. The drive
stops filling the segment when the maximum prefetch value has been
transferred (see the
SCSI-2 Interface Product Manual
).
).

16 Barracuda 1 and 2 Product Manual, Rev. C
Case B. A read command is received and the first logical block address
requested is not in any segment of the cache.
1. The drive fetches the requested logical blocks from the disc and
transfers them into a segment, then from there to the initiator in
accordance with the “buffer-full” ratio specification given in Mode Select
Disconnect/Reconnect parameters, page 02h (see the
face Product Manual
2. The drive prefetches additional logical blocks contiguous to those transferred in Case A, step 2 above and stores them in the segment. The drive
stops filling the segment when the maximum prefetch value has been
transferred.
During a prefetch, the drive crosses a cylinder boundary to fetch data only
if the Discontinuity (DISC) bit is set to 1 in bit 4 of byte 2 of the Mode Select
parameters page 8h. Default is zero for bit 4 (see the
Product Manual
Each cache se gment i s actually a self-contained circular buffer whose
length is an integer number of sectors. The drive supports operation with any
integer number of segments from 1 to 16. Divide the 983,040 bytes (491,520
bytes for ST11950WD and ST12550WD drives) in the buffer by the number
of segments to get the segment size; default is 3 segments (see the
).
2 Interface Product Manual
segments greatly enhances the cache’s overall performance, allowing a
wide ran ge of user-selectable configurations including a pure prefetch
strategy.
).
). The wraparound capability of the individual
SCSI-2 Inter-
SCSI-2 Interface
SCSI-
5.5.1 Adaptive read lookahead
Read lookahead causes the drive to continue reading data from the disc
following a normal read I/O until the read-ahead parameters are satisfied
(prefetch). If subsequent I/O requests can be satisfied from the prefetched
data in the data buffer, there is a significant improvement in performance
since a disc access is eliminated. If subsequent I/O requests cannot be
satisfied from the prefetched data, there is a reduction in performance due
to prefetch overhead.
The adaptive read lookahead feature suspends the prefetch operation if
three subsequent read I/O requests are not satisfied from the prefetched
data. This improves performance because unnecessary prefetches are
avoided. Prefetch is reinstated if an I/O request is sequential to a previous
I/O request.
5.6 Caching write data
Write caching is a drive-write operation, which uses a drive’s buffer storage
area where data to be written to the disc is stored while the drive performs
the Write command.
Write caching is enabled along with read caching. Default is cache enabled.
For write caching, the same buffer space and segmentation is used as set
up for read functions. When a write command is issued, the cache is first
checked to see if any logical blocks to be written are already stored in the
cache from a previous read or write command. If there are, the respective
cache segments are cleared. The new data is cached for subsequent read
commands.
Barracuda 1 and 2 Product Manual, Rev. C 17
Master Sync
Source
Host
(or other drive)
Spindle
Control
Drive 1
+5V
R
T
J4
1
2
Spindle
Control
Drive 2
+5V
R
T
J4
1
2
Spindle
Control
Drive n
+5V
R
T
J4
1
2
Sync Interface
System
Interface
If a 10-byte CDB write command (2Ah) is issued with the data page out (DPO)
bit set to 1, no write data is cached, but the cache segments are still checked
and cleared, if needed, for any logical blocks that are being written (see the
SCSI-2 Interface Product Manual
).
If the number of write data logical blocks exceeds the size of the segment
being written into when the end of the segment is reached, data is written into
the beginning of the same cache segment, overwriting data that was written
there at the beginning of the operation. However, the drive does not overwrite
data that has not yet been written to the disc.
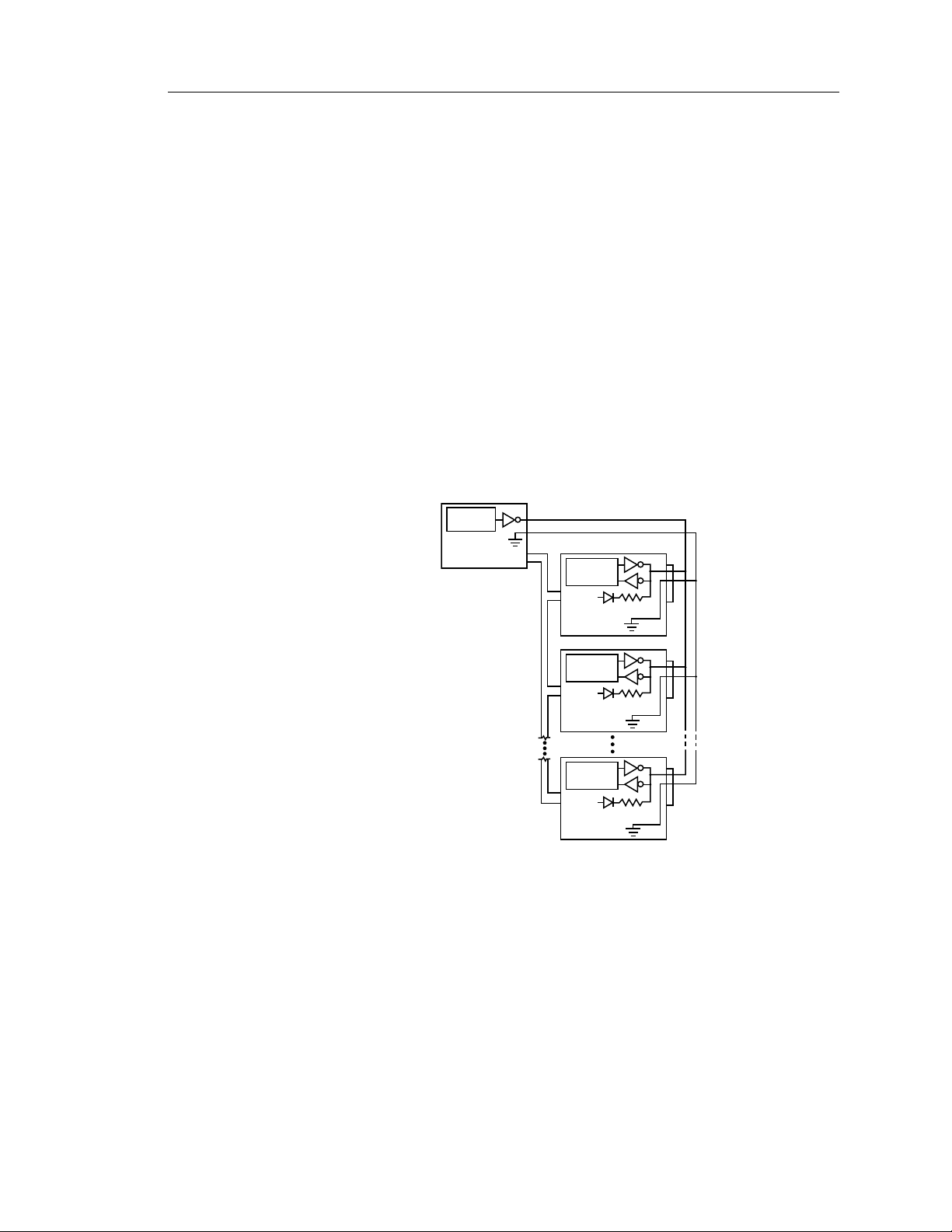
5.7 Synchronized spindle operation
The synchronized spindle operation allows several drives operating from the
same host to operate their spindles at the same synchronized rotational rate.
Drives operating in a system in synchronized mode increase the system’s
capacity and transfer rate in a cost-effective manner.
The interface consists of a twisted-pair cable, which connects the drives in
the synchronized system in a daisy-chain configuration as shown in
Figure 4.
Figure 4. Synchronized drive interconnect diagram
The host can reconfigure the drive any time after power-up to be the
master or a slave by using the Mode Select command on the Rigid Disc
Drive Geometry page. The master provides the reference signal to which
all other drives phase-lock, including the master. There is only one master
per system, and that can be a drive or the host computer. All drives may
be configured as slaves allowing the host to provide the reference signal.
Each drive also can be configured for the non-synchronized mode in which
it ignores any reference signal that might be present—this is the default
mode as shipped from the factory. Connect the synchronized reference
signal to the host only if the host provides the reference signal. If the host
does not provide the reference signal, do not connect the host.
18 Barracuda 1 and 2 Product Manual, Rev. C
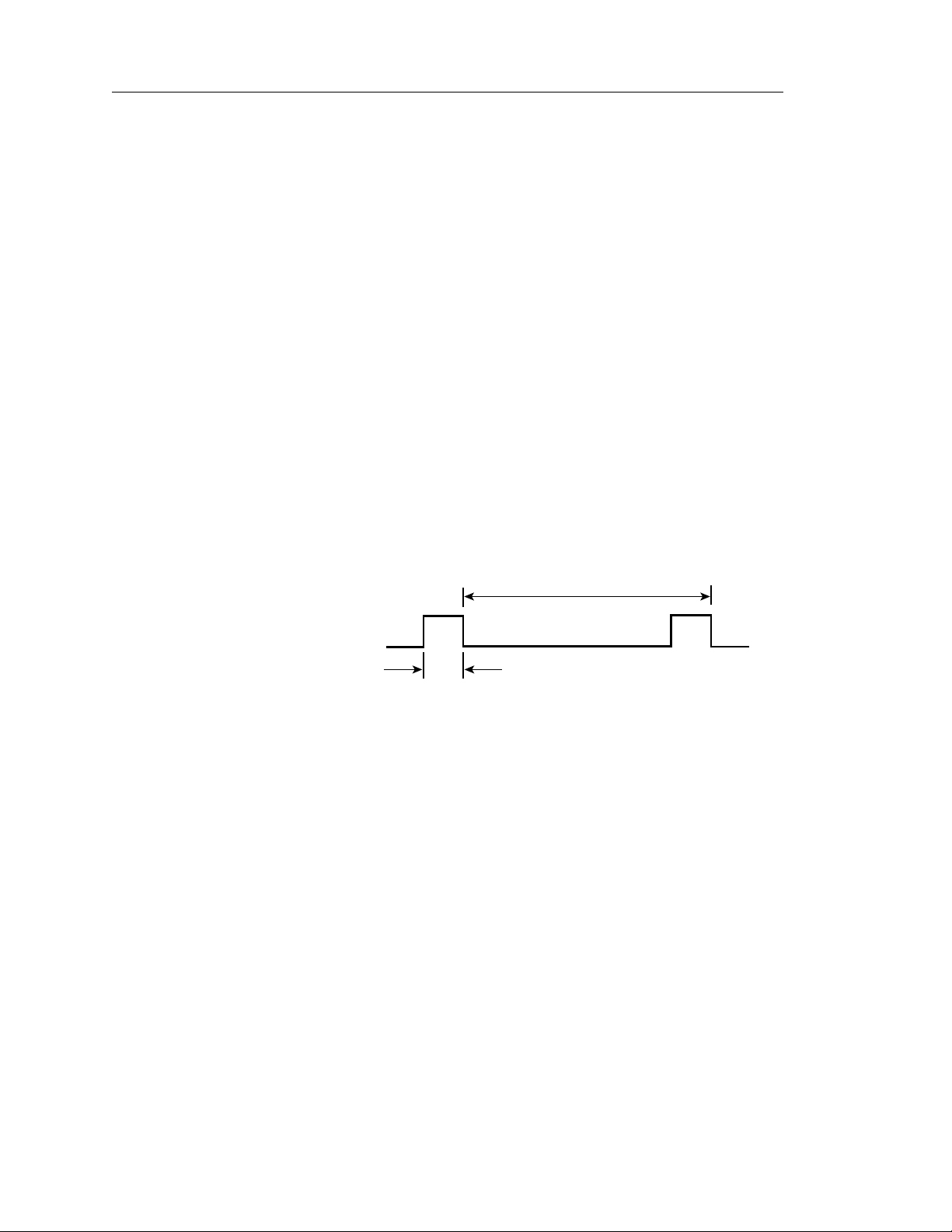
T
1.0 µsec min.
1.37 µsec max.
0
1
SSREF +
Rotational position locking
Note. Mode Select page 4, byte 17, bits 1 and 0.
RPL Description
00b Spindle synchronization is disabled (default value)
01b The target operates as a synchronized-spindle slave
10b The target operates as a synchronized-spindle master
11b The target operates as a synchronized-spindle master control
(not supported by the disc drive)
The VIC 2 LSI on the master drive provides the reference signal (SSREF+).
The index signal g enerates a 120 Hz s ignal. The signal is normally
false/negated (nominal 0V) and makes a transition to the true/asserted
(nominal +5V) level to indicate the reference position during the revolution
period. Master and slave drives use the trailing (falling) edge of the
reference signal to phase-lock their spindles. A maximum of 10 seconds
is allowed for a slave to synchronize with the reference signal. Figure 5
shows the characteristics of the reference signal.
Spindle synchronization input requirements:
SSREF +:Period (T) 0.0083 seconds (± 1.0% max)
Cycle-to-cycle variance: ± 10 microseconds
Phase error while synchronized: ± 20 microseconds
Figure 5. Synchronized reference signal characteristics
SCSI interface factors
The Rotational Position Locking (RPL) field in byte 17 (bits 0 and 1) of the
Rigid Disc Drive Geometry mode parameters page (page 04h) is used for
enabling and disabling spindle synchronization mode (see the
Interface Product Manual
). If the target fails to synchronize, it creates a unit
SCSI-2
attention condition to all initiators. The sense key is set to Unit Attention and
the additional sense code is set to Spindle Synchronized (5C01).
After reaching synchronization, if the target detects a change of synchronization and:
1. If the logical unit is not executing an I/O process for the initiator, then the
target creates a unit attention condition. The sense key is set to Unit
Attention and the additional sense code is set to Spindle Synchronized
(5C01) or Spindle Not Synchronized (5C02).
2. If the logical unit is executing an I/O process and no other error occurs,
then the target returns Check Condition status. The sense key is set to
Recovered Error if the target is able to complete the I/O process or to
Hardware Error if the target is unable to complete the I/O process. The
additional sense code is set to Spindle Synchronized (5C01) or Spindle
Not Synchronized (5C02).

Barracuda 1 and 2 Product Manual, Rev. C 19
You may operate the drive with a rotational skew when synchronized. The
rotational skew is applied in the retarded direction (lagging the synchronizedspindle master control). A rotational offset of up to 255/256 of a revolution
lagging may be selected. Select the amount of offset by using the Mode
Select command, Rigid Disc Drive Geometry page (page 04h), byte 18 (see
the
SCSI-2 Interface Product Manual
numerator of a fractional multiplier that has 256 as the denominator. For
example, 40h selects 40h/FFh or 1/4 of a revolution lagging skew, 80h
selects 1/2 of a revolution lagging skew, etc. Since the drive supports all
offset values from 0 to 255, values sent by the initiator are not rounded off.
The drive’s translation of the digital offset values to physical rotational offsets
results in offset values whose phase error lies within the ± 20 microseconds
phase error with respect to the supplied 120 Hz reference signal.
The drive does not have the capability to adjust the rotational offset value
requested by the initiator to a physical offset in the drive that corresponds in
any way to sector boundaries or changes in ZBR zones. The initiator must
formulate these boundaries or changes, if required, to calculate the value of
offset it sends to the drive.
). The value in byte 18 (0–FFh) is the
 Loading...
Loading...