

SAF Opal Pro MS6 Series, MS6-30, MS6-80, MS6-125, MS6-250 Installation & Operating Procedures
...Page 1

Installation & Operating Procedures
Opal Pro MS6
Series
SOLID STATE REDUCED VOLTAGE STARTER
FOR 3 PHASE INDUCTION MOTORS
Page 2
Opal Pro MS6 SERIES
SOLID STATE REDUCED VOLTAGE
STARTER
FOR 3 PHASE INDUCTION MOTORS
Revision 1.08 - 01/2011
Page 3

MS6 REDUCED VOLTAGE STARTER
Page 2
Page 4

MS6 REDUCED VOLTAGE STARTER
FOR YOUR SAFETY
Only qualified personnel should install this equipment, after first reading
and understanding all the information in this manual. All instructions should
be strictly adhered to. The user should consult SAF Drives Inc. or a SAF
OPAL Starters supplier for clarification of the contents of this manual should
any doubt or questions arise.
The installation of this equipment must be conducted in accordance with all
national, regional and local electrical codes.
All drawings and technical representations included in this manual are for
typical installations and should not in any way be considered for specific
applications or modifications. Consult SAF OPAL Starters for supplemental
instructions.
SAF Drives Inc. accepts no liability for any consequences resulting from
inappropriate, negligent or incorrect installation, application or adjustment of
this equipment.
The contents of this manual are believed to be correct at the time of
printing. In following with our commitment to the ongoing development and
improvement of our products SAF OPAL Starters reserves the right to
change the specification of this product and/or the content of this instruction
manual without notice.
Page 3
Page 5

MS6 REDUCED VOLTAGE STARTER
Page 4
Page 6

MS6 REDUCED VOLTAGE STARTER
TABLE OF CONTENTS
1 MS6 GENERAL DESCRIPTION................................................................................................. 7
1.1 OVERVIEW................................................................................................................................................................7
1.1.1 STANDARD FEATURES ...................................................................................................................................7
1.1.2 OPTIONAL FEATURES....................................................................................................................................8
1.2 APPLICATION NOTES ............................................................................................................................................8
1.2.1 OPERATION MODES........................................................................................................................................ 8
1.2.2 CHOOSING STARTING MODE.......................................................................................................................8
1.2.3 MOTOR AND LOAD TYPES............................................................................................................................9
1.2.4 STARTING AC MOTORS IN PARALLEL .....................................................................................................9
2 SPECIFICATIONS ......................................................................................................................10
2.1 POWER RATING.....................................................................................................................................................10
2.2 MAXIMUM RATINGS............................................................................................................ ................................10
2.3 SERVICE CONDITIONS ........................................................................................................................................10
2.4 FUSE SIZING............................................................................................................................................................11
2.5 DIMENSIONS...........................................................................................................................................................12
2.5.1 STANDARD UNIT.............................................................................................................................................12
2.5.2 REVERSING UNIT (OR STANDARD UNIT WITH DC INJECTION).....................................................12
3 TERMINALS................................................................................................................................ 13
4 KEY PAD OPERATION.............................................................................................................15
5 INSTALLATION AND START-UP........................................................................................... 16
5.1 INSPECTION............................................................................................................................................................16
5.2 SAFETY PRECAUTIONS.......................................................................................................................................16
5.3 MOUNTING GUIDELINES....................................................................................................................................16
5.4 WIRING GUIDELINES...........................................................................................................................................17
5.5 START-UP.................................................................................................................................................................18
5.5.1 BEFORE POWER-UP.......................................................................................................................................18
5.5.2 WITH POWER ON ...........................................................................................................................................18
6 FAULTS......................................................................................................................................... 19
FAULT (DISPLAY)....................................................................................................................................................19
Page 5
Page 7

MS6 REDUCED VOLTAGE STARTER
7 FEATURES................................................................................................................................... 20
7.1 SOFT STOP...............................................................................................................................................................20
7.2 SCR BY-PASS...........................................................................................................................................................20
7.3 SHEAR PIN PROTECTION ...................................................................................................................................20
7.4 SLOW SPEED FWD/REV (JOG) ...........................................................................................................................20
7.5 SHORTED SCR DETECTION ...............................................................................................................................21
7.6 SOLID STATE FULL SPEED REVERSING........................................................................................................21
7.7 DC INJECTION BRAKING....................................................................................................................................22
8 PARAMETERS ............................................................................................................................ 23
9 SPARES......................................................................................................................................... 28
9.1 SPARE PARTS..........................................................................................................................................................28
9.2 SCR INSTALLATION PROCEDURE...................................................................................................................28
10 CONNECTION DRAWINGS ................................................................................................... 29
10.1 TWO WIRE CONTROL.......................................................................................................................................29
10.3 THREE WIRE REVERSING...............................................................................................................................31
10.4 THREE WIRE WITH BY-PASS..........................................................................................................................32
10.5 THREE WIRE CONTROL WITH SHORTED SCR DETECTION................................................................33
10.6 DCI FOR 80 AMP UNITS AND BELOW...........................................................................................................34
10.7 DCI FOR 125 AMP UNITS AND ABOVE..........................................................................................................35
10.8 INTEGRATED BY-PASS .....................................................................................................................................36
Page 6
Page 8

MS6 REDUCED VOLTAGE STARTER
1 MS6 GENERAL DESCRIPTION
1.1 OVERVIEW
The Opal Pro series is a processor controlled line of solid state reduced voltage starters for use
with 3 phase induction motors. This series also includes various communication options,
which can be easily added to connect to standard industrial networks.
A solid state starter provides a step-less, smooth current ramp to the motor. This characteristic
eliminates current surges and mechanical torque transients. Since these units are solid state, we
now eliminate the maintenance of moving contacts, which are involved in almost any other
method of starting an AC induction motor.
1.1.1 STANDARD FEATURES
• 200 – 600 VAC 3 phase universal voltage, 50/60Hz with no adjustment
• Single control card through out Opal Pro range
• Current regulated closed loop
• Dual operation modes to match any application:
Constant Current mode for light loads or limited power supplies
Current Ramp mode for high inertia or heavy loads
• Soft stop
• Jog Speed:
14% of full speed forward
20% of full speed reverse
• Two or three wire control
• 120 VAC control inputs for:
Start
Stop
Jog
Reverse
Reset
Enable
• Keypad and LCD display for starter setup and diagnostics
• Single phase protection
• Phase rotation insensitive
• Instantaneous over-current trip
• Class 10, 15, 20, or 30 electronic motor overload
• Shorted SCR Fault output
• Shear pin Fault
• Dry contact relay outputs for:
Fault
By-pass
Shorted SCR
Running
Reverse
Page 7
Page 9

MS6 REDUCED VOLTAGE STARTER
1.1.2 OPTIONAL FEATURES
• By-Pass Contactor
Once the motor has reached operational speed, the by-pass contactor is closed. This
shorts the SCR’s which eliminates the voltage drop across the SCR’s, in turn being more
efficient and ridding excess heat.
• Solid State Full Speed Reversing
Through the addition of 4 SCR’s and a reversing card, smooth motor reversing is
achieved without having to stop the motor.
• DC Injection Braking
Through the addition of SCR’s and a DC injection card, adjustable electric braking of the
AC motor is performed.
• Various communication options, which will allow connection to standard industrial
networks
• NEMA 4 or NEMA 12 enclosures
1.2 APPLICATION NOTES
1.2.1 OPERATION MODES
With any induction motor the design is such that starting currents and torques are very high.
Across the line starting for a basic NEMA B design motor creates an in-rush current of 600%
or more of the nameplate rating. Often these levels are so high that they cause problems with
mechanical or auxiliary electrical. An example of this is the high starting torques which cause
belt slip and high currents, creating large voltage dips. The basis of choosing the correct
starting mode is determining the problem to be solved.
1.2.2 CHOOSING STARTING MODE
Constant Current Mode
Soft Starting for light loads or reducing starting current are accomplished by using the Constant
Current Mode.
On some applications the starting time is still too fast in the current ramp mode because the
load is too light. In this application it is best to select the constant current mode which will
allow the acceleration torque to be better controlled, actually kept constant.
If the available current is limited and causes significant voltage drops, the constant current
mode will allow flexibility in setting the current draw. Remember that the current level must be
great enough to provide acceleration torque and this level is determined by the load.
For all other applications, or if in doubt, select the Current Ramp Mode.
Current Ramp Mode
Torque Reduction on heavy loads is accomplished by using the Current Ramp Mode.
The idea is to reduce starting current to just above the level, which will produce enough torque
to get the motor to move. This is commonly referred to as "break-away torque". As the current
ramps up from this point, the torque also increases as time passes. If at the initiation of start,
the motor torque is less than the load, the motor will remain stalled until the torque ramps to a
sufficient level for acceleration.
Page 8
Page 10

MS6 REDUCED VOLTAGE STARTER
1.2.3 MOTOR AND LOAD TYPES
Squirrel Cage Motors
Squirrel cage motors, with a single winding and of any NEMA design may be connected to the
Opal Pro starter.
Wound Rotor Motors
Wound Rotor Induction Motors (WRIM) and solid state starters make an excellent combination
for frequent starting, jogging, plug-stopping and reversing applications. These WRIM motors
use multiple steps of resistors to provide various speed torque characteristics. This allows a
high starting torque characteristic while providing low starting current when compared to
NEMA B designs.
One disadvantage has been the high maintenance costs of the resistor and shorting contactor
bank. The use of an Opal Pro allows an improvement to this arrangement by allowing the
current to be limited without use of the multiple steps. Usually the load characteristic is such
that this starting may be accomplished with only one or two starting steps. By eliminating
several contactors a major savings is realized that often pays for the installation cost.
The common method is to add only one step of resistance at 20% (Rotor volts divided by Rotor
Amps times 20%). This resistance value will provide relatively high starting torque and the
Opal Pro will be used to limit the current. As little as 200% of motor full load current can
provide 100% starting torque unlike squirrel cage NEMA B motors which would require 500%
current. The resistor bank may be shorted with a contactor at full speed to reduce the slip and
eliminate the watt losses in the resistors.
Other Types of AC Motors
Opal Pro starters may also be used to start 2-speed motors with multiple windings or
connections. Proper contactor selection and sequencing is required for the specific motor.
Resistive and Inductive Loads
The Opal Pro MS6 is well suited for use as a phase controller or current regulator on resistive
or inductive loads such as heaters. When applied with a Temperature PI controller, the Opal
Pro MS6 will maintain smooth control to avoid the overheating associated with on/off type
controllers. Improved temperature accuracy and longer heater element life can be expected
over standard control methods.
1.2.4 STARTING AC MOTORS IN PARALLEL
Opal Pro MS6 starters can be used to start motors in parallel but they must have individual
overload devices added.
When the paralleled motors are also connected to the same load, mechanically or through the
material, then load sharing must be considered.
When the motors are mechanically tied, the load sharing is determined by how closely the
motor characteristics are to each other. It is important to keep the motors exactly the same.
Even changing the manufacturers of the motors can cause some variations in load sharing. The
Opal Pro size is determined by the total of the motor current ratings.
Page 9
Page 11
MS6 REDUCED VOLTAGE STARTER
2 SPECIFICATIONS
2.1 POWER RATING
Power 3 phase, 200-600 VAC, 50/60Hz
Control 115VAC 50Hz or 120VAC 60Hz
Rating See Section 2.2
All models have 1600V PIV SCR’s
Digital Inputs 120VAC, 2mA
Digital Outputs Relay contacts rated at 0.2A, 120VAC
By-Pass Output Relay contact rated at 5A, 120VAC
Analog Input 0 – 10Vdc
Analog Output 0 – 5Vdc, 5mA max
Protection Short circuit by HRC fuses or circuit breaker (supplied upon request)
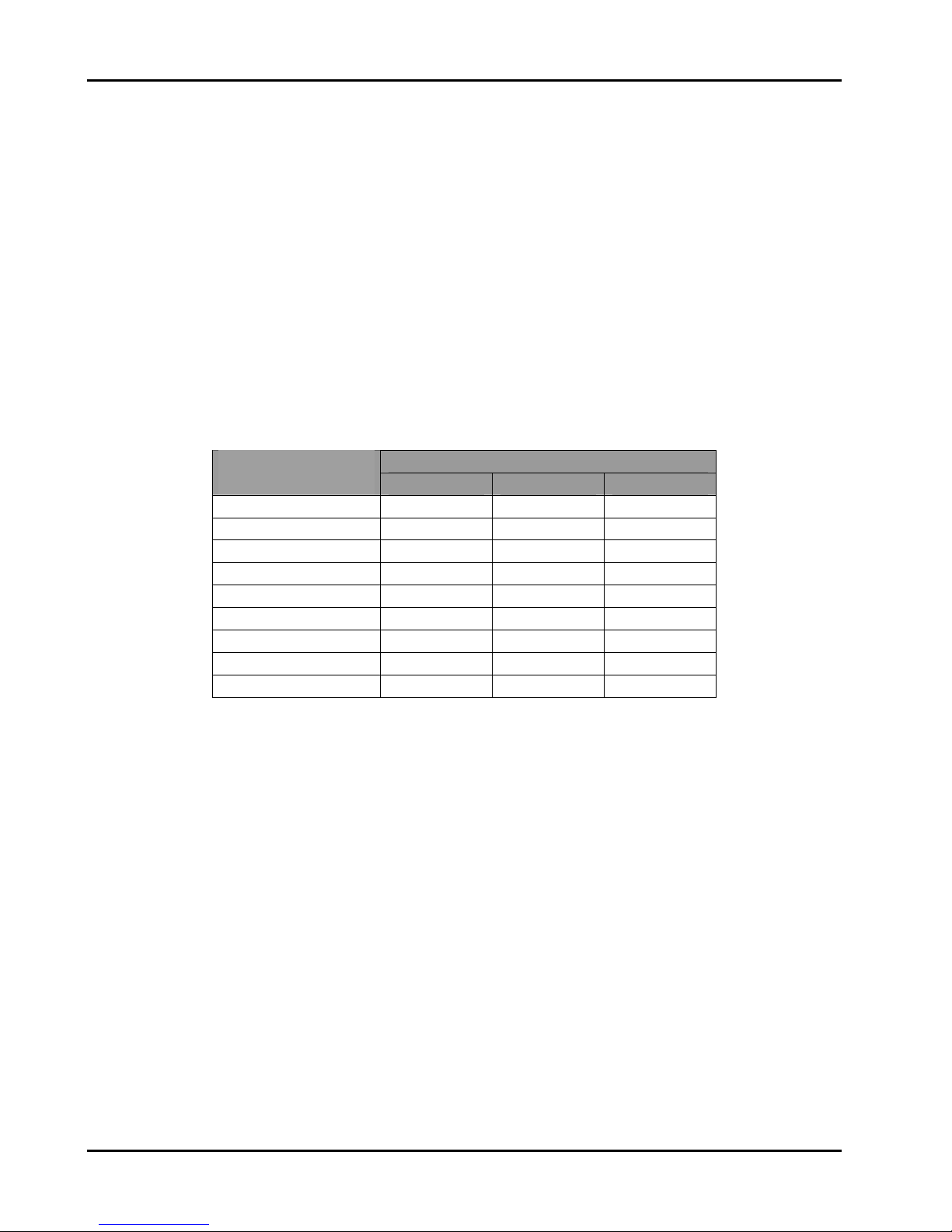
2.2 MAXIMUM RATINGS
HORSE POWER OPAL PRO
MODEL
MS6-30 10 25 30
MS6-50 20 40 50
MS6-80 30 60 75
MS6-125 40 100 125
MS6-250 100 200 250
MS6-420 175 350 420
MS6-500 200 400 500
MS6-600 200 500 600
MS6-800 300 600 800
* HP Rating for estimate only. Size by motor FLA
230VAC 460VAC 575VAC
2.3 SERVICE CONDITIONS
Elevation For altitudes in excess of 1000 meters (3300 feet) above sea level, all
assemblies must be de-rated 1% for every 100 meters (330 feet) above
Ambient Temperature Do not install in areas where the ambient temperature falls below
0°C(32°F) or exceeds 40°C(104°F)
Page 10
Page 12
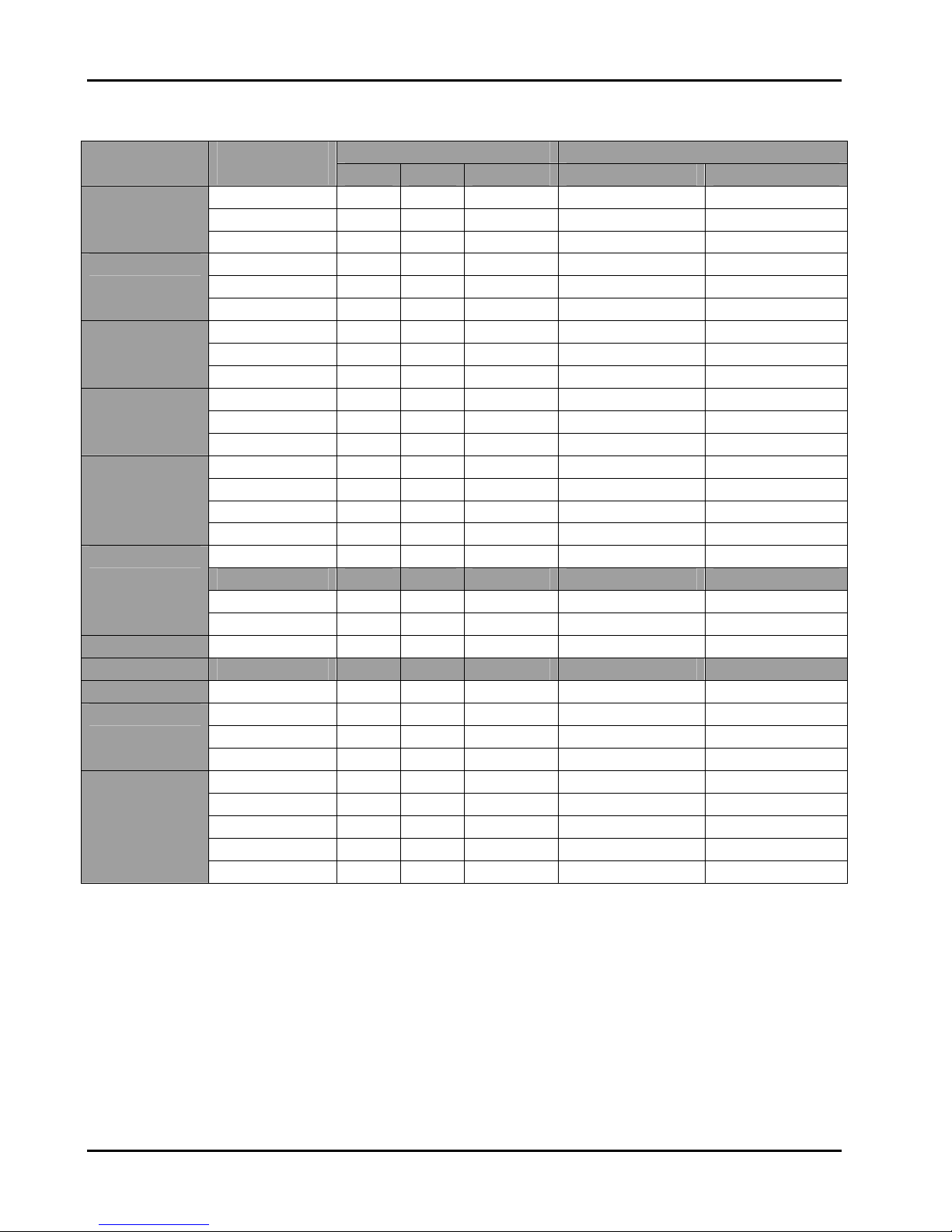
2.4 FUSE SIZING
MS6 REDUCED VOLTAGE STARTER
MODEL
MS6-30
MS6-50
MS6-80
MS6-125
MS6-250
MS6-420
MS6-500
MS6-600
MS6-800
MS6-1000
MOTOR
FLC
240V 460V 575V FAST ACTING TIME DELAY
HP J FUSE AMPS OPAL PRO
20 --- 15 20 50 30
25 10 20 25 60 40
30 --- 25 30 70 50
37 15 --- --- 70 50
40 --- 30 40 80 60
50 20 40 50 100 80
60 25 --- 60 125 90
65 --- 50 --- 150 100
75 30 60 75 150 125
90 --- 75 --- 200 150
100 40 --- 100 200 150
125 50 100 125 250 200
150 60 125 150 300 225
180 75 150 --- 400 250
200 --- --- 200 400 300
250 100 200 250 500 350
300 125 250 300 600 450
L FUSE AMPS
360 150 300 --- 600 500
400 --- --- 400 600 600
500 200 400 500 800 600
L FUSE AMPS
600 250 500 600 900 800
700 300 --- 700 1000 1000
720 --- 600 --- 1100 1000
800 --- --- 800 1200 1200
840 --- 700 --- 1400 1200
850 350 --- --- 1400 1200
900 --- --- 900 1500 1200
960 --- 800 --- 1500 1600
1000 --- --- 1000 1600 1600
Page 11
Page 13

MS6 REDUCED VOLTAGE STARTER
2.5 DIMENSIONS
2.5.1 STANDARD UNIT
DIMENSIONS MODEL
HEIGHT WIDTH DEPTH WEIGHT
MS6-30-N1 43.2cm(17”) 30.5cm(12”) 26.75cm(10.5”) 13.6kg(30 lbs.)
MS6-50-N1 43.2cm(17”) 30.5cm(12”) 26.75cm(10.5”) 13.6kg(30 lbs.)
MS6-80-N1 43.2cm(17”) 30.5cm(12”) 26.75cm(10.5”) 13.6kg(30 lbs.)
MS6-125-CH 38cm(15”) 38cm(15”) 29.25cm(11.5”) 18.2kg(40 lbs.)
MS6-250-CH 38cm(15”) 38cm(15”) 29.25cm(11.5”) 18.2kg(40 lbs.)
MS6-420-CH 49.5cm(19.5”) 38cm(15”) 29.25cm(11.5”) 22.6kg(50 lbs.)
MS6-500-CH 49.5cm(19.5”) 45.75cm(18”) 33cm(13”) 42.2kg(93 lbs.)
MS6-600-CH 49.5cm(19.5”) 45.75cm(18”) 33cm(13”) 42.2kg(93 lbs.)
MS6-800-CH 68.6cm(27”) 61cm(24”) 38.1cm(15”) 56.7kg(125 lbs.)
MS6-1000-CH 68.6cm(27”) 61cm(24”) 38.1cm(15”) 56.7kg(125 lbs.)
2.5.2 REVERSING UNIT (or STANDARD UNIT WITH DC INJECTION)
DIMENSIONS MODEL
HEIGHT WIDTH DEPTH WEIGHT
MS6R-30-N1 43.2cm(17”) 30.5cm(12”) 26.75cm(10.5”) 13.6kg(30 lbs.)
MS6R-50-N1 43.2cm(17”) 30.5cm(12”) 26.75cm(10.5”) 13.6kg(30 lbs.)
MS6R-80-N1 43.2cm(17”) 30.5cm(12”) 26.75cm(10.5”) 13.6kg(30 lbs.)
MS6R-125-CH 62cm(24.5”) 38cm(15”) 29.25cm(11.5”) 27kg(60 lbs.)
MS6R-250-CH 62cm(24.5”) 38cm(15”) 29.25cm(11.5”) 27kg(60 lbs.)
MS6R-420-CH 83cm(32.5”) 38cm(15”) 29.25cm(11.5”) 34kg(75 lbs.)
MS6R-500-CH 83cm(32.5”) 45.75cm(18”) 33cm(13”) 63kg(140 lbs.)
MS6R-600-CH 83cm(32.5”) 45.75cm(18”) 33cm(13”) 63kg(140 lbs.)
MS6R-800-CH 113cm(44.5”) 61cm(24”) 38.1cm(15”) 85kg(188 lbs.)
MS6R-1000-CH 113cm(44.5”) 61cm(24”) 38.1cm(15”) 85kg(188 lbs.)
Page 12
Page 14

MS6 REDUCED VOLTAGE STARTER
3 TERMINALS
CONTROL POWER INPUT
1
Control Power Line 1 (120VAC ± 10%)
2 Control Power Neutral
120VAC INPUT LOGIC
3 Start Input – 120VAC Momentary normally open switch for 3
4 Stop Input(three wire control) / DCI or
Soft Stop Enable(two wire control) 120VAC
5 Jog Input – 120VAC Maintained normally open switch used
6 Reverse Input – 120VAC Maintained normally open switch used
7 Reset Input – 120VAC Momentary normally open switch use to
8 Enable Input – 120VAC Maintained normally open switch used
9 Input Neutral Neutral for 120VAC control signals
Power for the control card and also for
the cooling fans on units below 500A
wire control. Maintained normally open
switch for 2 wire control
Momentary normally closed switch for 3
wire control. Maintained normally open
switch used to enable or disable a
selected stop mode in 2 wire control.
to activate jog function
to activate reverse function (if installed).
If activated along with JOG the unit will
run in reverse jog mode
reset a fault
to enable unit operation. Unit will not
run if this input is not active. If opened
while running the unit will coast to a
stop no matter what stopping method is
choosen. If this input is active and all 3
incoming phases are valid a green
indicator will be illuminated on the
keypad.
Page 13
Page 15

MS6 REDUCED VOLTAGE STARTER
DRY CONTACT RELAY OUTPUTS
10 Fault Relay Common
11 Fault Relay N.C.
12 Fault Relay N.O.
13 Bypass Relay Common
14 Bypass Relay N.O.
15 Shorted SCR Relay Common
16 Shorted SCR Relay N.C.
17 Shorted SCR Relay N.O.
18 Run Relay Common
19 Run Relay N.O.
20 Reverse Relay Common
21 Reverse Relay N.O.
ANALOG I/O (not isolated)
22 Analog Input ( 0 to 10VDC)
23 Analog Common
24 Analog Output (0 to 5VDC, max 5mA)
25 Analog Common
The fault relay is energized in a NO
Fault condition. In a fault condition or
a case of power loss the relay will deenergize and the contacts will go to
there normal condition indicating a
fault.
This relay is used to control a by-pass
contactor either directly or indirectly if
the coil current of the by-pass contactor
is to large (>5amps). This relay will
energize once the Opal Pro has phased
full on and the motor current has
dropped below 110% of the nameplate
current.
This relay is energized when a shorted
SCR is detected and should be used to
trip a shunt trip breaker.
This relay is energized when the unit is
running
This relay is energized when the unit is
running is the reverse mode
Page 14
Page 16

MS6 REDUCED VOLTAGE STARTER
4 KEY PAD OPERATION
Actual Mode This is the mode that the unit will be in on power up. If the u nit is healthy the actual
motor current will be displayed in Amps. If the unit is faulted the fault will be
displayed in text format. If the unit is faulted and the user enters any of the other
display modes the unit will automatically return to this mode and display the fault
every 15 seconds. If the “MENU” key is pressed in this mode the user will enter the
Group mode. If you are in the Group Mode you can return to the Actual Mode by
pressing the “MENU” key.
Group Mode This mode allows the user to scroll through the different parameter groups using the
up and down arrow keys. This mode can be accessed from either the Actual Mode
or Parameter Mode by pressing the “MENU” key. If the “ENTER” key is pressed in
this mode you will enter the Parameter mode and be able to view the parameters of
the current group that is being displayed.
Parameter Mode This mode allows the user to view and modify the individual parameters in a
particular group. The parameters can be scrolled through using the up and down
arrow keys. If a parameter is to be modified the “ENTER” key must be pressed and
the parameter value will now blink. At this point it is possible to chang e the
parameter setting using the up and down arrow keys. When the desired setting is
reached the “ENTER” key should be pressed again and the blinking of the parameter
will now stop and the new parameter setting will be saved. To return to the Group
mode the “MENU” key should be pressed.
Reset Key This key will reset any fault as long as the fault has no longer exists.
Local/Remote Key This key switches the unit between local and remote control. Local or Remote mode
is displayed via LED. In local the unit can be started from the keypad. In local
mode the start and stop commands from the terminal strip or communication module
are ignored. In Remote mode, the terminal strip becomes active.
Start Stop Key
Red LED This LED will be illuminated during a fault condition or during initial power-up
Green LED This LED will be illuminated when the starter is ready to be started. This includes
This key is used to start and stop the motor in local mode. You still need the En able
signal at the terminal strip.
the ENABLE signal being active and also having valid three phase power.
Page 15
Page 17

MS6 REDUCED VOLTAGE STARTER
5 INSTALLATION AND START-UP
5.1 INSPECTION
• The Opal Pro has been packaged to protect it from damage caused by normal handling
during shipment, however mishandling may cause damage to the Opal Pro. Unpack the unit
as soon as it is received and check for any shipping or storage damages.
• If damage is found, notify the carrier. Any damage claim must be filed by the customer
since all shipments are F.O.B. Manufacturers plant unless otherwise specified.
• If the Opal Pro is not installed when received, store it in a clean, dry, well ventilated area,
free from heat, humidity, oil, dust, and metal particles.
5.2 SAFETY PRECAUTIONS
CAUTION
Equipment is at line voltage when AC power is connected.
Pressing "STOP" pushbutton does not remove AC mains potential.
All phases must be disconnected before it is safe to work on machinery, touch motor terminals or
control equipment parts.
• The electrical code requires all equipment, starter, motor, operator station, etc. to be
grounded properly.
• An incoming circuit breaker or disconnect switch must be locked open before wiring or
servicing this starter, motor, or other related equipment. This equipment must be installed
and serviced only by qualified personnel, familiar with this starter.
• The user is responsible for ensuring that proper short circuit protection is provided by either
a circuit breaker or HRC fuses.
5.3 MOUNTING GUIDELINES
• Standard Nema 1 Opal Pro Starters must be installed indoors in a well ventilated area, free
from heat, humidity, oil, dust and metal particles.
• One foot of clearance must be kept all around in a natural cooled unit. The equipment must
be mounted away from any heat source. See Section 2 for additional specifications.
• Be aware that the heatsink may reach 70° C / 158°F during normal operation. Do not
install the starter in contact with any material that cannot accept this temperature.
• The starter must be mounted vertically and where it will not experience excessive shock or
vibration.
Page 16
Page 18

MS6 REDUCED VOLTAGE STARTER
5.4 WIRING GUIDELINES
• The electrical code requires that an approved circuit disconnecting device be installed in the
incoming AC supply circuit. Mounted in a location readily accessible to personnel
installing or servicing this equipment.
• Power factor correcting capacitors MUST NOT be connected to the OPAL output. If
desired, they may be added ahead of the starter. Capacitors can be connected before
starting or after the motor has reached full speed.
• In-line contactors are not required; however they can be used on the line side or the motor
side without detriment to the starter. It is recommended that the contactor be sequenced to
open and close under no-load conditions to prolong the life of the contacts.
• Size the power wiring as per local code. On long wire runs it is recommended to use a
larger wire size.
• All three phases of the incoming power wires must pass through the same hole in the
enclosure. This rule also applies to all phases of the outgoing or motor wires.
• If an electro-mechanical brake is used in the system, it must be powered from the line side
of the starter, to ensure full voltage to the brake.
Page 17
Page 19

MS6 REDUCED VOLTAGE STARTER
5.5 START-UP
5.5.1 BEFORE POWER-UP
• Ensure that all electrical connections are completed as shown on the schematics, and that
connections are properly tightened. Including a solid ground connection.
5.5.2 WITH POWER ON
• Check 120VAC control voltage to terminals 1 & 2 of the Opal Pro
• Set parameter 1001 to the control scheme desired
• Set parameter 1002 to the ramp time desired (set to 0 for constant current mode)
• Set parameter 1003 to step current required (set to required current for constant current
mode)
• Set group 11 parameters for desired stopping method and setup
• Set parameter 1301 to motor full load current as read from the motor nameplate
• Set parameter 1302 to the motor nameplate voltage
• Set parameter 1303 to the motor nameplate service factor
• Set group 14 parameters if a communication module is installed on the Opal Pro
• Set group 15 parameters for the desired fault conditions
• Check for the red LED on the keypad to be NOT illuminated (if it is illuminated there is a
fault which will be shown on the LCD display of the keypad)
• Check for the green LED on the keypad to be illuminated (if it is not, the ENABLE signal
(terminal 8) is missing or there is a problem with the incoming 3 phase power)
• Once start has been initiated the motor must start rotating immediately, it must not stall. If
it does not rotate immediately the step current (parameter 1003) must be increased
• Parameter 1002 can be adjusted to extend or decrease the acceleration time. The actual
motor accelerating time depends on the motor current as well as the mechanical load. The
acceleration time entered is the amount of time it will take for the current to increase from
the step setting to 500% of the nameplate current
Page 18
Page 20

6 FAULTS
Fault (display) Description
IOC Instantaneous Over Current
MTR OVRLD Motor Thermal Overload (calculated)
PHASE LOSS Incoming Phase Loss
SHEAR PIN Excessive Motor Current While Running
SHORTED SCR Shorted SCR Fault
HEAT SINK OT Heat Sink Over Temperature
COMM FLT Communication Fault
POWERING UP Power Up Sequence
MS6 REDUCED VOLTAGE STARTER
- Current has reached a value of 1000% of stack size
- Usually a short circuit on the output or misfiring of SCR’s
- This fault cannot be disabled
- motor has been drawing over 100% of motor nameplate current
for a specified amount of time based on the class of overload
selected in group 15 parameter 2
- after this fault has occurred the Opal Pro will not allow a reset
for approx. 6 minutes (this is to allow the motor to cool down)
- this fault can be disabled in group 15 parameter 2
- one of the incoming phases is missing or abnormally low
- phase voltages can be read in group 1 parameters 2, 3, and 4
- this fault will not be triggered until the motor is commanded to
start
- this fault cannot be disabled
- if the Opal Pro is phased fully on and the motor is up to speed
this fault will be triggered if the current goes above 300%
- this fault can be disabled in group 15 parameter 1
- this fault will not be triggered until the motor is commanded to
start
- this fault cannot be disabled
- One of three temperature switches mounted on the heat sink has
been triggered
- These switches trigger at approx. 85 degrees Celsius
- The switches are only mounted on units which include fans
- This fault cannot be disabled
- a loss of communication between the Opal Pro and the master
device has been detected based on a watch dog bit that is sent
back an forth
- this fault is disabled when no communication cards are installed
on the Opal Pro
- this fault can also be disabled in group 15 parameter 3
- the time delay for the watch dog bit can be set in group 15
parameter 4
- the Opal Pro will be faulted for the first 6 seconds after the
120VAC control power is applied
- this allows time for everything to initialize and then a fault reset
is automatically applied at the end of the 6 seconds
Page 19
Page 21

MS6 REDUCED VOLTAGE STARTER
7 FEATURES
7.1 SOFT STOP
• This provides a controlled stopping method to eliminate the water hammering effect
associated with fluid pumping applications.
• The Opal Pro operates in the opposite fashion of starting. When stop is initiated the Opal
Pro output voltage is reduced to the point set by parameter 1102 and then ramps down
based on a rate set in parameter 1103. The Opal Pro will remain on for the amount of time
set in parameter 1103. If two wire control is used then terminal 4 is a soft stop enable input
and when de-activated will turn the Opal Pro off during a soft stop.
7.2 SCR BY-PASS
• A three pole contactor used in conjunction with the by-pass contact eliminates the SCR
losses by shorting them out after the motor has reached full speed. This feature is a true
Watt Saver modification and permits the use of the Opal Pro in a NEMA 4 or NEMA 12
enclosure. The by-pass contactor is switched on only after the motor has reached full
speed and as such sees only motor full load current. At stop, the by-pass contactor is
opened while the SCR's are triggered fully on, limiting the power contacts opening voltage.
The SCR's are then switched off without having any voltage surge.
• When a by-pass contactor is used in conjunction with reversing, the REV contact must be
used to drive a slave relay that inter-locks the two by-pass contactors to ensure proper
sequencing of the contactors.
• This option requires by-pass lugs which are an add on option to the standard Opal Pro
7.3 SHEAR PIN PROTECTION
• This feature has been designed to provide motor jam protection, similar to a mechanical
shear pin.
• Once the motor has reached full speed, the MicroOpal will trip if the motor current
increases to 300%. Parameter 1501 enables or disables this feature.
7.4 SLOW SPEED FWD/REV (JOG)
• This provides the ability to run an AC motor at 14% speed in the forward direction or 20%
in the reverse direction without any added SCR’s.
• To jog in the forward direction the jog input (terminal 5) must be activated
• To jog in the reverse direction the jog input (terminal 5) and the rev input (terminal 6) must
be activated.
• Current draw is abnormally high during jog mode therefore it must only be used for very
short amount of time to avoid overload trips and excessive motor heating.
Page 20
Page 22

MS6 REDUCED VOLTAGE STARTER
7.5 SHORTED SCR DETECTION
• This option provides protection against the unlikely event of a shorted Silicon Controlled
Rectifier (SCR).
• The state of the SCR’s are checked every time a start or jog command is initiated. An SCR
that shorts while the Opal Pro is running will not be identified until the next time the Opal
Pro attempts to start or jog.
• This fault should be used in conjunction with a shunt trip circuit breaker or an in-line
contactor.
• In the event of a shorted SCR, it is not sufficient to merely trip the starter. The incoming 3
phase power must be removed. The danger associated with a shorted SCR is that even when
the starter is not running, current may pass freely through the motor.
• If a shorted SCR is detected, the Shorted SCR relay is energized. The form C relay
contacts on terminals 15, 16 and 17, are provided for means of opening the circuit breaker
or contactor used.
• When a shorted SCR fault occurs you will have to use an ohm meter to find out which SCR
is shorted. This can be done by turning all the power off and using an ohm meter to
measure the resistance between L1 and T1. The resistance should be greater than
10Kohms. If it is a short either SCR 1 or 2 is bad. Repeat this for L2 and T2, which will
check SCR’s 3 and 4. Then finally check L3 and T3, which will check SCR’s 5 and 6.
7.6 SOLID STATE FULL SPEED REVERSING
• This option provides a smooth, current controlled, motor rotation reversal without any
current surge or torque jerk. Motor stopping is not required. Additions to the Opal Pro
include a reversing card, CA531, plus four additional SCR's.
• With the reverse input (terminal 6) enabled the starter will fire the reverse bridge.
• Terminals 20 and 21 dry contact used to indicate the direction selected and by-pass
contactor sequencing for a reverse/by-pass combination.
• When the motor is running and the forward/reverse switch changes states, the Mirco Opal
turns all SCR's off. After a time delay, the Opal Pro is switched back on, triggering a
different set of SCR's. This effectively switches two output lines, decelerates the motor
down to zero speed, and continues to accelerate it to full speed in the opposite direction.
The motor reversal is performed under complete current control via the RAMP (parameter
1002) and STEP (parameter 1003) settings.
• If a CA531 card is not present on the Opal Pro the reverse command will be ignored for
normal running but will still be active for jog reversing.
Page 21
Page 23

MS6 REDUCED VOLTAGE STARTER
7.7 DC INJECTION BRAKING
• DC injection braking provides smooth braking for AC induction motors.
• DC injection offers adjustable braking because it is current controlled.
• Unlike a mechanical brake, an electrical brake will never wear out.
• The brake operates by injecting DC current in two phases of the motor to rapidly decelerate
it to zero speed.
• When stop is commanded the Opal Pro shuts off for 2 seconds to allow the voltage across
the motor to drop. The DC injection current is then applied at a level set in parameter 1104
for the amount of time set in parameter 1105. It does not provide zero speed sensing,
although if two wire control is used terminal 4 can be used to disable the DC injection
(activated = enabled).
• If braking is released before the motor stops, the motor will coast to rest. If the braking
remains on after the motor stops, the DC supply will provide a holding brake.
Page 22
Page 24

MS6 REDUCED VOLTAGE STARTER
8 PARAMETERS
GROUP
1 Actual Values
101 Current of the motor in Amps Read Only
102 Line 1 to line 2 volts Read Only
103 Line 1 to line 3 volts Read Only
104 Line 2 to line 3 volts Read Only
105 DI1-DI5 Status right most bit: Start
106 Analog input 1 value Read Only
107 Relay Status right most bit: Run relay
108 Analog output 1 value Read Only
2 Version Info
201 Stack size in Amps Read Only
202 Communication Module Type Read Only
203 Firmware version Read Only
PARAMETER DESCRIPTION RANGE ACCESS
Read Only
Stop
Jog
Reverse
Reset
Read Only
By-Pass relay
Shorted SCR relay
Reverse relay
Fault relay
Page 23
Page 25

MS6 REDUCED VOLTAGE STARTER
10 Start Control
1001 Start \ Stop control
- 2 wire means that you have a single maintained start
contact
- 3 wire means that you have a momentary normally open
start contact and a momentary normally closed stop
contact
- Comm module means the start command will come from
an external device through the communication module
installed
1002 Ramp
- this is the time that it will take for the current reference to
increase from the Step value (parameter 1003) to 500%
of the motor name plate current (entered in parameter
1301)
- a setting of “0 seconds” will cause the Opal to operate in
constant current mode, this means the current reference
will be set at the Step value (parameter 1003) and will not
change
1003 Step Current
- this is the amount of current (in percent of motor
nameplate current entered in parameter 1301) that will
initially be applied to the motor before the current
reference begins to ramp up to 500%
- this value is usually set as low as possible but still high
enough so that the motor begins to rotate and soon and
the start command is applied
- if the Ramp time is set to 0 (parameter 1002) then this is
the value of current (in percent of motor nameplate
current entered in parameter 1301) that the Opal will be
limited to constantly
1004 IREF (Current Reference)
- Internal means the current reference is generated
internally from the ramp and step parameters
- Analog In means that the current reference will b e tak en
from the analog input (0 to 10Vdc = to 0 to 500% of
nameplate current)
- Comm module means the current reference will be taken
from the communication link (0 to 1000 = 0 to 500% of
nameplate current)
1005 Phase Angle
- Internal means the phase angle reference is generated
internally from the current loop
- Analog In means that the phase angle reference will be
taken from the analog input (0 to 10Vdc = to min to max
phase angle)
- Comm module means the phase angle reference will be
taken from the communication link (0 to 1000 = min to
max phase angle)
- Note that when using a phase angle reference from the
analog input or communication link the Opal Pro makes
no attempt to limit current
2-Wire
3-Wire
Comm Module
0 – 60 seconds Read\Write
20% - 400% Read\Write
Internal
Analog In
Comm Module
Internal
Analog In
Comm Module
Read\Write
Read\Write
Read\Write
Page 24
Page 26

MS6 REDUCED VOLTAGE STARTER
1006 Jog Accelerating Current Limit
- This is the current limit that will be used when in the jog
mode
- When jog is initiated the current will ramp up to this
value in 1 second and remain here for the amount of time
specified in parameter 1008.
1007 Jog Current Limit
- This is the current limit that will be used in jog mode after
the acceleration time has elapsed
1008 Jog Ramp
- This is the amount of time that the starter will regulate the
accelerating current set in parameter 1006 in jog mode
before dropping to the current limit set in parameter
1007
-a value of zero will cause the starter to go directly to
regulating the current set in parameter 1007
0% - 400% Read\Write
0% - 400% Read\Write
0 – 5 seconds Read\Write
11 Stop Control
1101 Stop Mode
- Coast means that the Opal will inhibit firing of the
SCR’s as soon as the stop command is received
- Soft Stop means that the Opal will ramp down the
current in the amount of time specified in parameter
1102
1102 Sft Stop Step
- This is the amount of motor voltage that the output
will step down to when a stop is commanded. If this
value is set to high the motor will go through a state of
instability.
1103 Sft Stop Rmp
- This is the amount of time that it will take to ramp the
voltage down from the step voltage to 35% of the
motor voltage
1104 DCI Current
- this is the amount of current that will be regulated during
DC Injection stopping (represented as a percentage of
nameplate current)
1105 DCI Time
- this is the amount of time that the Opal will DC inject for
Coast
Soft Stop
DC Injection
50% – 85% Read\Write
2 – 60 seconds Read\Write
100% – 300% Read\Write
1 – 60 seconds Read\Write
Read\Write
Page 25
Page 27

MS6 REDUCED VOLTAGE STARTER
12 Analog I/O
1201 Analog Output
- This parameter designates what signal will be sent o ut the analog
output
- Current reference means the current reference that the Opal is
currently using (0-5volts = 0 – 615% motor nameplate current)
- Current feedback means that the actual motor current will be sent
(0-5volts = 0-615% motor nameplate current)
- Overload level means that the present calculated thermal capacity
will be sent (0-5volts = 0-100% of capacity)
- Phase Angle means that the current phase angle will be sent (0-
5volts = 0-180 degrees)
13 Motor Data
1301 Motor Amps
- this should be the name plate full load amps of the motor
1302 Motor Volts
- this should be the name plate voltage of the motor
1303 Service Factor
- this should be the name plate service factor of the motor
14 Communications
1401 Modbus Slave Node
- This is the slave node that the Opal will be seen as
- This parameter is only accessible if a Modbus Slave card is
installed in the Opal
1402 MB Slv Baud Rate
- This is the baud rate that the MB Slave card will attempt to
communicate
- This parameter is only accessible if a Modbus Slave card is
installed in the Opal
1403 DeviceNet MacID
- This is the DeviceNet MacID that the Opal will be seen as
- This parameter is only accessible of a DeviceNet Slave card is
installed in the Opal
1404 DeviceNet Slv Baud Rate
- This is the baud rate that the DeviceNet Slave card will attempt to
communicate
- This parameter is only accessible of a DeviceNet Slave card is
installed in the Opal
1405 DH+ Station Address
- This is the station ad dress that the Opal will be seen as
- This parameter is only accessible if a DH+ card is installed
1406 DH+ Baud Rate
- This is the baud rate that the DH+ card will communicate at
- This parameter is only accessible if a DH+ card is installed
Current Reference
Current Feedback
Overload Level
Phase Angle
5 – 1100 Amps Read\Write
240 – 600 Volts Read\Write
1.00 – 1.30 Read\Write
1 – 7 Read\Write
300 Kbaud
1200 Kbaud
2400 Kbaud
4800 Kbaud
9600 Kbaud
19200 Kbaud
38400 Kbaud
57600 Kbaud
0 – 31 Read\Write
125 Kbaud
250 Kbaud
500 Kbaud
1 - 32 Read\Write
57.6 Kbaud
115.2 Kbaud
230.4 Kbaud
Read\Write
Read\Write
Read\Write
Page 26
Page 28

15 Faults
1501 Shear Pin Flt
- Enables and disables the shear pin fault
- The shear pin fault is automatically disabled during jog
1502 MOL Flt
- Sets up the class of overload that will be used
- Can also disable the overload
1503 Overload Level
- Represents has a percentage the amount of overload that has
accumulated
- Once this level reaches 100% the Opal will trip on a MOL FLT
- this level will increase based on the class set in parameter 1502 any
time that the current feedback is above the name plate current
(parameter 1301) multiplied by the service factor (parameter 1303)
- this level will decrease any time that the current feedback is below
that level
- if this level reaches 100% and the drive trips, a reset will not be
allowed until this level has decreased to 15%
1504 Comm Flt
- this will enable or disable the communication fault if a
communication module is present
- a communication fault is detected by monitoring a watch dog bit
that the Opal sends out to the master device which has to be
inverted and sent back with in a specific amount of time (parameter
1505)
1505 Comm Flt Time
- this is the time used to determine a communication fault
MS6 REDUCED VOLTAGE STARTER
Enable
Disable
Disable
Class 10
Class 15
Class 20
Class 30
Read Only
Enable
Disable
0.1 – 5.0
seconds
Read\Write
Read\Write
Read\Write
Read\Write
Page 27
Page 29

MS6 REDUCED VOLTAGE STARTER
9 SPARES
9.1 SPARE PARTS
Model SCR Current
Transformer
Control
Card
Stack ID
Card
MOV
MS6-30 N10SP03(61A SCR) T261123 (1500:1) CA530 CA532(30) O210050
MS6-50 N10SP06(90A SCR) T261123 (1500:1) CA530 CA532(50) O210050
MS6-80 N10SP16(140A SCR) T262320 (2500:1) CA530 CA532(80) O210050
MS6-125 N728352(300A SCR) T262320 (2500:1) CA530 CA532(125) O210050
MS6-250 N728452(580A SCR) T262320 (2500:1) CA530 CA532(250) O210050
MS6-420 N718602(720A SCR) T265320 (5000:1) CA530 CA532(420) O210050
MS6-500 N718133(1100A SCR) T268320 (8500:1) CA530 CA532(500) O210050
MS6-600 N718153(1200A SCR) T268320 (8500:1) CA530 CA532(600) O210050
MS6-800 N718552(1500A SCR) T261321 (10000:1) CA530 CA532(800) O210050
9.2 SCR INSTALLATION PROCEDURE
• Clean both heat sink and SCR surfaces.
• Apply a thin layer of joint compound (Noalox) to both SCR surfaces.
• Observe correct SCR polarity.
• Install SCR so that roll pins engage dimples on both sides of the SCR.
• Tighten clamp bolts evenly until finger-tight.
• Tighten each bolt according to table below (based on number of spring bars and size of
bars).
Note: SMALL clamps are 10.5cm(4.25inches) and LARGE clamps are 12.5cm(5inches)
CLAMP SIZE SPRING BARS BOLT TURNS PAST
FINGER TIGHT
SMALL 1 0.75
SMALL 2 1
LARGE 3 1.75
LARGE 4 1.75
Page 28
Page 30

10 CONNECTION DRAWINGS
10.1 TWO WIRE CONTROL
MS6 REDUCED VOLTAGE STARTER
Enable must be closed
for starter to operate
Page 29
Page 31

MS6 REDUCED VOLTAGE STARTER
10.2 THREE WIRE CONTROL
Enable must be closed
for starter to operate
Page 30
Page 32

10.3 THREE WIRE REVERSING
MS6 REDUCED VOLTAGE STARTER
Enable must be closed
for starter to operate
Page 31
Page 33

MS6 REDUCED VOLTAGE STARTER
10.4 THREE WIRE WITH BY-PASS
Page 32
Enable must be closed
for starter to operate
Page 34

MS6 REDUCED VOLTAGE STARTER
10.5 THREE WIRE CONTROL WITH SHORTED SCR DETECTION
Enable must be closed
for starter to operate
Page 33
Page 35

MS6 REDUCED VOLTAGE STARTER
10.6 DCI FOR 80 AMP UNITS AND BELOW
Enable must be closed
for starter to operate
Page 34
Page 36

10.7 DCI FOR 125 AMP UNITS AND ABOVE
MS6 REDUCED VOLTAGE STARTER
Enable must be closed
for starter to operate
Page 35
Page 37

MS6 REDUCED VOLTAGE STARTER
10.8 INTEGRATED BY-PASS
MOTOR
INDUCTION3 PHASE
T1
MS6B
BPM
T2
BPM
T3
BPM
232224
25
COM
COM
ANALOG IN
ANALOG OUT
G6G4 K5 G5 K6
K4
TO SCR GATE S
21
REV
RUN
18 2019
17
SCR
SHORTED
1514 16
BYPASS RELAY
TERMINALS 2 AND 9 ARE NOT INTERNALLY CONNECTED.
3 TO 9 BE DIFFERENT THAN THE 120VAC SUPPLY USED
THEREFORE IF DESIRED THE 120VAC SUPPLY FOR TERMINALS
FOR TERMINAL 1 AND 2
%%UNOTE:
SCR2
MOV1
SCR1
CT1
L1
FU1
SCR4
MOV2
SCR3
CT2
L2
FU2
SCR6
MOV3
SCR5
CT3
G1K1 K3G2K2 G3
CA532
CT1 CT2 CT3
L3
FU3
GND
BYPASS
131110 12
137
FAULT
CA530
98
NEUTRAL
ENABLE
7
RESET
65
REV.
JOG
43
STOP
NEUTRAL
AC
1
FU4
1
START
2
26
ENABLE
RESET
REVERSE
JOG
STOP
START
BPR
FOR 200A AND ABOVE CONTACTORS.
- BYPASS RELAY MUST BE USED
%%UNOTE:
BYPASS
CONTACTOR
38
BPR BPM
50/60HZ.
200-600V
PROTECTED
3PH.
Page 36
R
50VA MIN.
PROTECTED
115VAC/50HZ
120VAC/60HZ.
Page 38

www.safdrives.com
email: answers@opalstarters.com
(Replies given within 24 hours)
18 Neville Street, Unit C
New Hamburg, ON N3A 4G7
Tel: 519-662-6489
Fax: 1-866-280-5247
www.opalstarters.com
 Loading...
Loading...