


Tello
Table of contents
 Loading...
Loading...
Manual del usuario
2018.05
v1.0

Búsqueda por palabras clave
Busque palabras clave como "batería" e "instalar" para encontrar un tema. Si utiliza Adobe
Acrobat Reader para leer este documento, pulse Ctrl+F en Windows o Command+F en Mac
para iniciar la búsqueda.
Ir a un tema
Ver una lista completa de temas en el índice. Haga clic en un tema para ir hasta esa sección.
Impresión de este documento
Este documento admite la impresión en alta resolución.
Uso de este manual
Leyenda
Advertencia Importante Sugerencias Referencia
Leer antes del primer vuelo
Lea los siguientes documentos antes de utilizar el TELLOTM:
1. Manual del usuario del Tello
2. Guía de inicio rápido del Tello
3. Renuncia de responsabilidad y directrices de seguridad del Tello
Le recomendamos ver todos los videotutoriales del sitio web ocial de RYZE Tech https://www.
ryzerobotics.com/tello y leer la
Tello
antes del primer vuelo. Prepárese para el primer vuelo leyendo la
Tello
y consulte este
Manual del usuario del Tello
Renuncia de responsabilidad y las Directrices de seguridad del
Guía de inicio rápido del
para obtener más información.
Descargue la aplicación Tello
Busque "Tello" en la App Store o en Google Play, o escanee el código QR de la
derecha para descargar la última versión de la aplicación. La versión para Android de
la aplicación Tello es compatible con Android 4.4 y versiones posteriores. La versión
para iOS de la aplicación Tello es compatible con iOS 9.0 y versiones posteriores.
Unidades de medida
Para diseñar y probar este producto se han utilizado unidades de medida del sistema métrico.
Para la comodidad de los usuarios, este manual también incluye las unidades que se utilizan en los
Estados Unidos. Las cifras que se indican en las unidades que se utilizan en los Estados Unidos
son conversiones de dichas cifras en el sistema métrico. En algunos casos son aproximadas,
mientras que a veces se redondean para que a los usuarios les resulte más fácil cumplir las
directrices de seguridad. Todas las cifras que se indican en las unidades que se utilizan en los
Estados Unidos se utilizan solamente con nes de referencia.
2018 Ryze Tech. Todos los derechos reservados.
©
2

Contenido
Uso de este manual
Leyenda
Leer antes del primer vuelo
Descargue la aplicación Tello
Unidades de medida
Perl del producto
Introducción
Diagrama de la aeronave
Aeronave
Modos de vuelo
Indicador de estado de la aeronave
Sistema de posicionamiento visual
Modos de Vuelo Inteligente
Hélices
Protectores para las hélices
Batería de vuelo
Cámara
Aplicación Tello
Conexión a la aeronave
Vista de la cámara
Control de la aeronave
Vuelo
Requisitos del entorno de vuelo
Cumplimiento de las normativas
Vuelo de prueba
Actualizaciones de rmware
Especicaciones
Información postventa
2
2
2
2
2
4
4
4
5
5
6
7
8
12
13
14
16
17
17
17
18
21
21
21
21
22
22
22
2018 Ryze Tech. Todos los derechos reservados.
©
3
Perl del producto
Introducción
El Tello es un pequeño cuadricóptero que cuenta con un sistema de posicionamiento visual y una
cámara de a bordo. Gracias a su sistema de posicionamiento visual y su avanzado controlador de
vuelo, puede volar en modo estacionario y es apto para volar en interiores. Funciones avanzadas
como el modo Rebote (Bounce mode), Volteretas 8D (8D Flips) y Tomas EZ (EZ Shots) convierten
el uso de Tello en una experiencia divertida. El Tello captura fotos de 5 megapíxeles y transmite
vídeos en vivo a la aplicación Tello de su dispositivo móvil en 720p. Su tiempo máximo de vuelo es
de aproximadamente 13 minutos*, con una distancia máxima de vuelo de 100 m (328 ft).
La protección a prueba de fallos permite que el Tello aterrice de forma segura incluso si se pierde
la conexión, mientras que las protecciones para las hélices ofrecen una mayor seguridad.
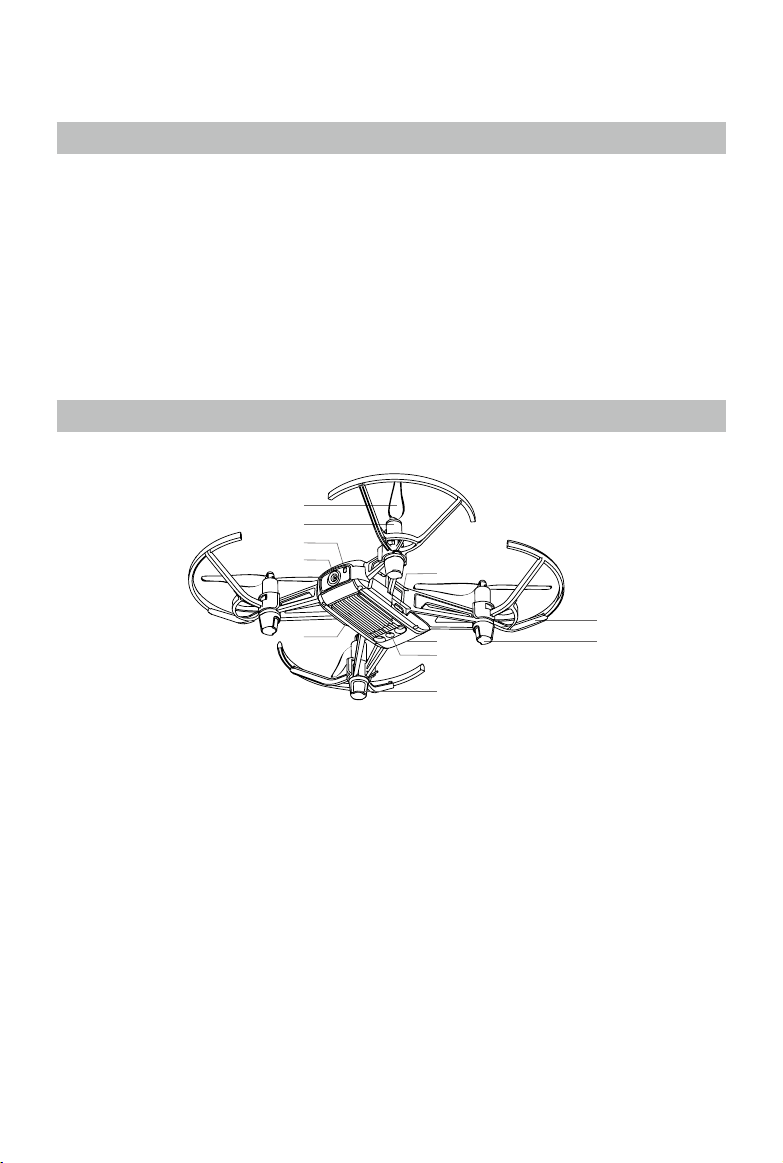
Diagrama de la aeronave
1
2
3
4
9
5
8
7
6
10
6
1. Hélices
2. Motores
3. Indicador de estado de la aeronave
4. Cámara
5. Botón de encendido
6. Antenas
7. Sistema de posicionamiento visual
8. Batería de Vuelo
9. Puerto Micro USB
10. Protectores para las hélices
* El tiempo máximo de vuelo se determinó en ausencia de viento a una velocidad sostenida de
15 km/h (9 mph). Este valor debe tomarse sólo a título de referencia.
2018 Ryze Tech. Todos los derechos reservados.
©
4

Aeronave
El Tello contiene un controlador de vuelo, un sistema de transmisión de vídeo, un sistema de
posicionamiento visual, un sistema de propulsión y una batería de vuelo. Consulte el diagrama de
la aeronave en la sección Perl del producto.
Modos de vuelo
El Tello se puede controlar manualmente mediante las palancas de control virtuales de la
aplicación Tello o con un control remoto compatible. También dispone de varios Modos de Vuelo
Inteligente que se pueden utilizar para que realice maniobras automáticamente. Asimismo, el Tello
dispone de un modo de vuelo al que accede en determinadas circunstancias.
Los Modo de Vuelo Inteligente se describen en detalle en la sección Modos de Vuelo Inteligente.
La sección Indicador de estado de la aeronave describe cómo el indicador de estado de la
aeronave señala el modo en que se encuentra el dispositivo.
Cómo volar el Tello manualmente
El Tello permite seleccionar dos velocidades de vuelo al volar la aeronave manualmente:
Lenta (Slow) (predeterminada):
•
máxima de vuelo de 14,4 km/h (8,9 mph).
Rápida (Fast):
•
vuelo de 28,8 km/h (17,8 mph).
Al volar el Tello manualmente, la aeronave utiliza el sistema de posicionamiento visual para
estabilizarse automáticamente. En condiciones en las que el sistema de posicionamiento visual no
está disponible, la aeronave cambiará automáticamente al modo Atti (Attitude mode).
Para cambiar de Lenta (Slow) a Rápida (Fast) deberá leer y aceptar las renuncias de
responsabilidad y advertencias que aparecen en la aplicación Tello. Asegúrese de que
comprende las diferencias entre las dos velocidades de vuelo.
El ángulo máximo de posición de vuelo será de 25° y la velocidad máxima de
El ángulo máximo de posición de vuelo será de 9° y la velocidad
En la aplicación Tello, la velocidad de vuelo se selecciona en la pantalla de conguración.
Modo Atti (Attitude Mode)
La aeronave cambia automáticamente al modo Atti (Attitude mode) cuando el sistema de
posicionamiento visual no está disponible. En el modo Atti (Attitude mode), la aeronave no puede
posicionarse por sí misma, de modo que se verá afectada por el entorno. Los factores del entorno,
como el viento, pueden provocar un desplazamiento horizontal, lo que puede presentar riesgos,
especialmente al volar en espacios limitados. Si la aeronave entra en modo Atti (Attitude mode),
aterrice en un lugar seguro lo antes posible para evitar riesgos.
El indicador de estado de la aeronave parpadea en amarillo lentamente cuando la
aeronave se encuentra en modo Atti (Attitude mode).
2018 Ryze Tech. Todos los derechos reservados.
©
5
Manual del usuario
TELLO
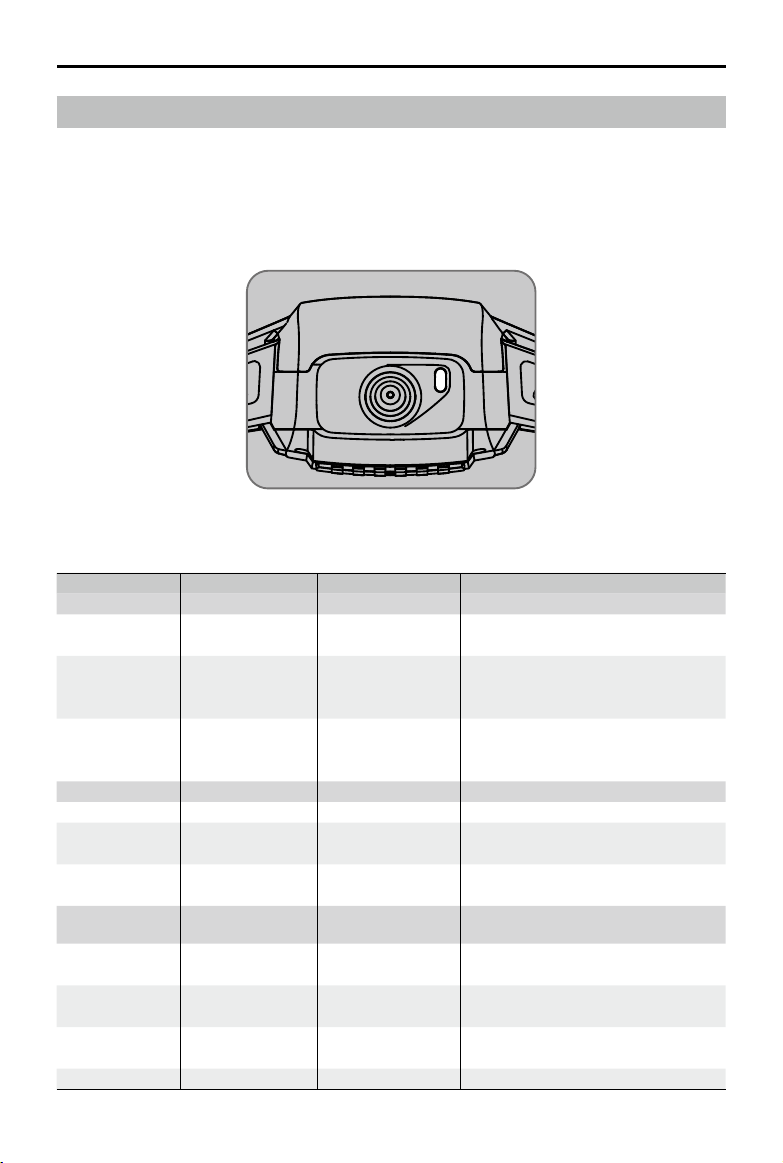
Indicador de estado de la aeronave
El indicador de estado de la aeronave del Tello comunica los estados del sistema de control de
vuelo y la batería de vuelo de la aeronave. El indicador de estado de la aeronave se encuentra en
el morro de la aeronave, junto a la cámara, tal y como se muestra en la siguiente imagen. Consulte
la tabla siguiente para obtener más información sobre los estados de la aeronave que comunica el
indicador de estado de la aeronave.
Estados del indicador de estado de la aeronave
Color Patrón Estado de la aeronave
Estados normales
Estados de carga
Estados de
advertencia
Alterna entre rojo,
verde y amarillo
Verde
Amarillo
Azul Luz ja La carga ha nalizado
Azul
Azul
Amarillo
Rojo
Rojo
Rojo Luz ja Error crítico
Parpadea
Parpadea dos
veces de forma
periódica
Parpadea
lentamente
Parpadea
lentamente
Parpadea
rápidamente
Parpadea
rápidamente
Parpadea
lentamente
Parpadea
rápidamente
Encendiendo y realizando pruebas de
autodiagnóstico
Sistema de posicionamiento visual
activado
Sistema de posicionamiento visual no
disponible, la aeronave se encuentra
en modo Atti (Attitude mode)
Cargando
Error de carga
Pérdida de señal del control remoto
Advertencia de nivel
Batería baja crítica
2018 Ryze Tech. Todos los derechos reservados.
©
6

Manual del usuario
TELLO
Sistema de posicionamiento visual
El sistema de posicionamiento visual ayuda a la aeronave a mantener su posición actual. Con la
ayuda de este sistema, el Tello puede volar en modo estacionario con mayor precisión, así como
volar en interiores o exteriores en condiciones sin viento. Los componentes principales del sistema
de posicionamiento visual son una cámara y un módulo infrarrojo 3D situado en la parte inferior de
la aeronave.
Sistema de
posicionamiento
visual
Uso del sistema de posicionamiento visual
El sistema de posicionamiento visual se activa automáticamente cuando se enciende la aeronave.
No es necesario realizar ninguna otra acción. El sistema de posicionamiento visual solo es ecaz
cuando la aeronave se encuentra a altitudes de 0,3 a 10 m (1,0 a 32,8 ft), y funciona de manera
óptima a altitudes de 0,3 a 6 m (1,0 a 19,7 ft). Si la aeronave se encuentra fuera de este intervalo,
el funcionamiento del sistema de posicionamiento visual podría verse comprometido, de modo que
deberá extremar la precaución.
• El rendimiento del sistema de posicionamiento visual se ve afectado por la supercie que
se esté sobrevolando. La aeronave cambia automáticamente al modo Atti (Attitude mode)
cuando el sistema de posicionamiento visual no está disponible. En el modo Atti (Attitude
mode), la aeronave no puede posicionarse por sí misma. Opere la aeronave con sumo
cuidado en las siguientes situaciones, ya que podría entrar en modo Atti (Attitude mode):
a. Al volar a alta velocidad por debajo de 0,5 m (2 ft).
b. Al volar sobre supercies monocromas (p. ej., negro puro, blanco puro, rojo puro, verde puro).
c. Al volar sobre supercies muy reectantes.
d. Al volar sobre el agua o supercies transparentes.
e. Al volar sobre supercies u objetos en movimiento.
2018 Ryze Tech. Todos los derechos reservados.
©
7
Loading...