

Page 1
Reference Manual
Rockwell Automation Library of Process Objects:
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Version 3.5
IMPORTANT
This manual applies to the Rockwell Automation Library of Process Objects version 3.5 or earlier.
For Rockwell Automation Library of Process Objects version 5.0, see
• PROCES-RM200
For Rockwell Automation Library of Process Objects version 4.0 or later, use the following manuals:
• PROCES-RM013 contains logic instructions
• PROCES-RM014 contains display elements
Page 2
Important User Information
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to
familiarize themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws,
and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are required
to be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may be
impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the
use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment,
which may lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property
damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
IMPORTANT
Identifies information that is critical for successful application and understanding of the product.
Labels may also be on or inside the equipment to provide specific precautions.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous
voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may
reach dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to
potential Arc Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL
Regulatory requirements for safe work practices and for Personal Protective Equipment (PPE).
Allen-Bradley, Rockwell Software, and Rockwell Automation are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3

Table of Contents
Preface Software Compatibility and Content Revision. . . . . . . . . . . . . . . . . . . . 5
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
PowerFlex 523/525 Variable
Frequency Drives (P_PF52x)
Guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Functional Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Required Drive Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Required Files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Controller File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Visualization Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Controller Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
PowerFlex 523/525 Variable Frequency
Drives InOut Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
PowerFlex 523/525 Variable Frequency
Drives Input Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
PowerFlex 523/525 Variable Frequency
Drives Output Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
PowerFlex 523/525 Variable Frequency
Drives Local Configuration Tags. . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Alarms. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Execution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Programming Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Display Elements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
State Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Status/Quality Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Mode Indicators. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Alarm Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Maintenance Bypass Indicator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Using Display Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Quick Display. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Faceplate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Operator Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Maintenance Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Engineering Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Diagnostics Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Trends Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Alarms Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
PowerFlex 523/525 Variable Frequency
Drives Faceplate Help. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 3
Page 4

Table of Contents
Notes:
4 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 5
Preface
Software Compatibility and Content Revision
Additional Resources
Table 1 - Summary of Changes
Topic Page
Visualization Files: Global Objects (.ggfx) - Process Diagnostic Objects 10
For the latest compatible software information and to download the Rockwell
Automation® Library of Process Objects, see the Product Compatibility and
Download Center at
http://www.rockwellautomation.com/rockwellautomation/support/pcdc.page.
For general library considerations, see Rockwell Automation Library of Process
Objects, publication
PROCES-RM002.
These documents contain additional information concerning related products
from Rockwell Automation.
Table 2 - Additional Resources
Resource Description
PlantPAx® Distributed Control System Selection Guide,
publication
PlantPAx Distributed Control System Reference Manual,
publication
Rockwell Automation Library of Process Objects,
publication
FactoryTalk® View Machine Edition User Manual,
publication
FactoryTalk View Site Edition User Manual,
publication
PowerFlex® 520-series AC Drives Specification,
publication
PowerFlex 520-Series Adjustable Frequency AC Drive User
Manual, publication
Logix5000™ Controllers Add-On Instructions Programming
Manual, publication
Rockwell Automation Library of Process Objects: Common
Alarm Block (P_Alarm) Reference Manual, publication
SYSLIB-RM002
Rockwell Automation Library of Process Objects: Interlocks
with First Out and Bypass (P_Intlk) Reference Manual,
publication
Rockwell Automation Library of Process Objects: Common
Mode Block (P_Mode) Reference Manual,
publication
PROCES-SG001
PROCES-RM001
PROCES-RM002
VIEWME-UM004
VIEWSE-UM006
520-TD001
520-UM001
1756-PM010
SYSLIB-RM004
SYSLIB-RM005
Provides information to assist with equipment
procurement for your PlantPAx system.
Provides characterized recommendations for
implementing your PlantPAx system.
Provides general considerations for the PlantPAx system
library of process objects.
Provides details on how to use this software package for
creating an automation application.
Provides details on how to use this software package for
developing and running human machine interface
(HMI) applications that can involve multiple users and
servers, distributed over a network.
Shows the specifications and certifications for the
PowerFlex 520-series AC drives.
Provides information on using the PowerFlex 520-Series
Adjustable Frequency AC Drives.
Provides information for designing, configuring, and
programming Add-On Instructions.
Details how to monitor an input condition to raise an
alarm. Information includes acknowledging, resetting,
inhibiting, and disabling an alarm. Generally the
P_Alarm faceplate is accessible from the Alarms tab.
Explains how to collect (sum up) the interlock
conditions that stop or de-energize a running or
energized piece of equipment or prevent it from
starting or being energized.
Explains how to select the Mode (owner) of an
instruction or control strategy. The Mode instruction is
usually embedded within other instructions to extend
their functionality. It is possible to use a standalone
Mode instruction to enhance a program where modes
are wanted.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 5
Page 6
Preface
Table 2 - Additional Resources
Resource Description
Rockwell Automation Library of Process Objects: Permissives
with Bypass (P_Perm) Reference Manual,
publication SYSLIB-RM007
Rockwell Automation Library of Process Objects: Restart
Inhibit for Large Motor (P_ResInh) Reference Manual,
publication
Rockwell Automation Library of Process Objects: Run Time
and Starts (P_RunTime) Reference Manual,
publication
SYSLIB-RM009
SYSLIB-RM010
Details how to collect permissive conditions to start a
piece of equipment.
Explains how to protect a large motor from damage
caused by repeated starts.
Explains how to accumulate the total run time and
count of starts for a motor or other equipment.
You can view or download publications at
http://www.rockwellautomation.com/literature/. To order paper copies of
technical documentation, contact your local Allen-Bradley distributor or
Rockwell Automation sales representative.
6 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 7
Add-On Instruction
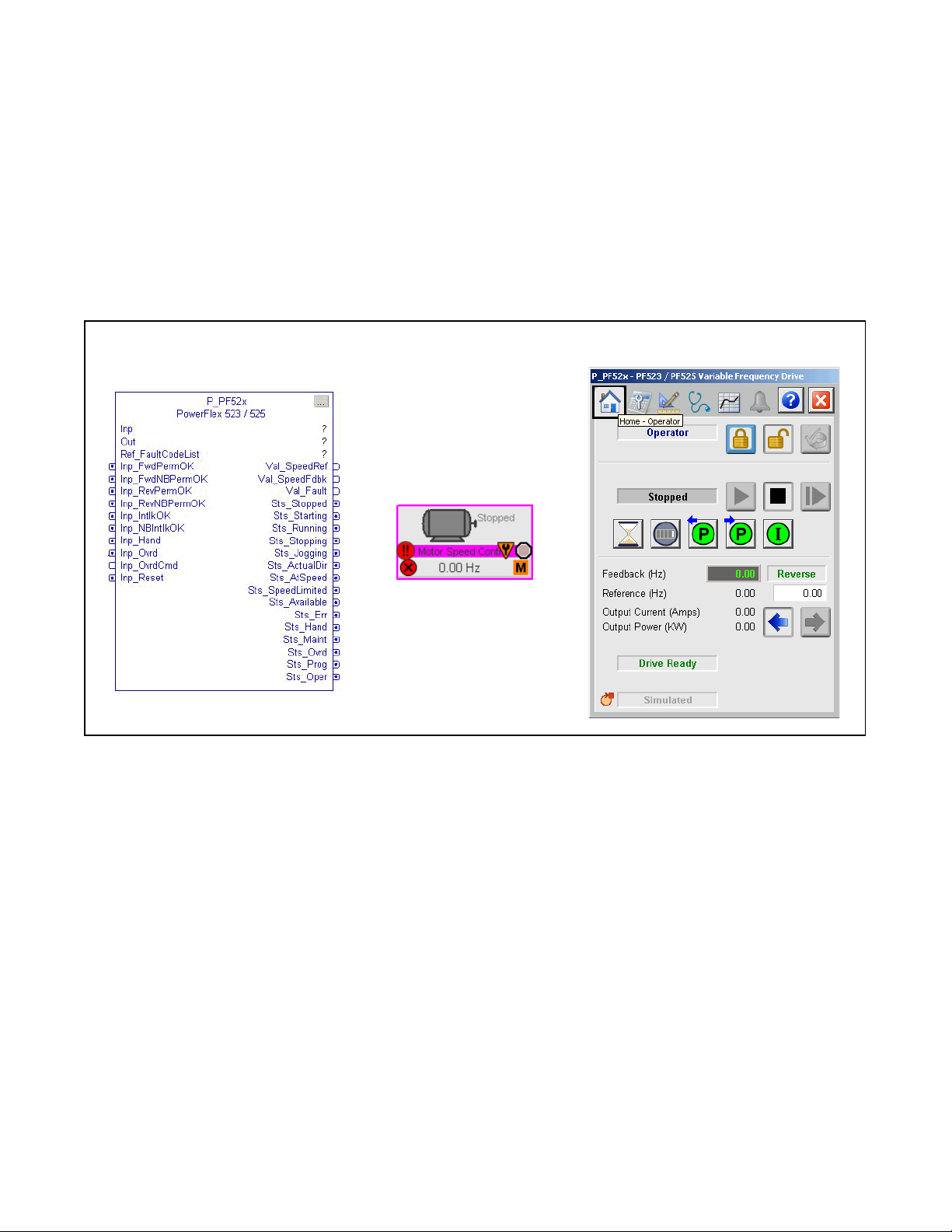
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
The P_PF52x (PowerFlex® 523/525 Variable Frequency Drives) object is used to
control and monitor a PowerFlex 523 variable-frequency drive with optional
EtherNet/IP Interface. The P_PF52x can also control and monitor a PowerFlex
525 variable-frequency drive with embedded or optional add-on EtherNet/IP
Interface.
Faceplate
Global Objects
Guidelines
Use this instruction to monitor and control a motor that uses an Allen-Bradley®
PowerFlex 523 or PowerFlex 525 variable frequency drive interfaced via
EtherNet/IP. This instruction provides for collecting and displaying diagnostic
information from the drive by using configured datalinks on the EtherNet/IP
interface.
Do not use this instruction with other Allen-Bradley drive families. There are
dedicated Add-On Instructions for the PowerFlex 753 variable frequency drive
that use the 20-COMM-E EtherNet/IP interface (P_PF753), and for the
PowerFlex 753 or 755 variable frequency drive that uses the built-in or add-on
20-750-series EtherNet/IP interfaces (P_PF755). It is highly recommended that
other Allen-Bradley (or non-Allen-Bradley) drive families use the P_VSD generic
Variable Speed Drive Add-On Instruction.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 7
Page 8
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Functional Description
The P_PF52x instruction provides the following capabilities:
• Starting, stopping, jogging of the drive, and setting speed reference and
direction
• Monitoring of run feedback, display of actual drive status, including
acceleration, deceleration, direction, and speed
• Detection of Failure to Start, Failure to Stop, and Drive Fault
• Monitoring of Permissive conditions to allow starting
• Monitoring of Interlock conditions to stop/prevent starting
• Simulation, providing feedback of a working drive while the outputs are
disabled
• Monitoring I/O communication faults
• Alarms for Fail to Start, Fail to Stop, Interlock Trip, Drive Fault, and
I/O Fault
• Option to automatically reset faults and alarms when an operator
commands the motor to start or stop
• Supports HMI 'breadcrumbs' for Alarm Inhibited, Bad Configuration,
Not Ready, and Maintenance Bypass Active
• 'Available' status for use by automation logic to know whether a motor can
be controlled by other objects
Required Drive Configuration
IMPORTANT
Be certain to set up the drive Datalinks as follows:
• Input Assembly
– Drive Status (standard)
– Output Frequency (standard)
– Datalinks:
1. Fault 1 Code (Par 007)
2. Output Current (Par 003)
3. Output Power (Par 017)
4. User choice
• Output Assembly
– Drive Logic Command (standard)
– Frequency Command (Speed Reference) (standard)
– Datalinks:
All four output datalinks are user choice
'User Choice' Datalinks are not used by this Add-On Instruction and can be left
unused or set up for your application.
8 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 9
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Required Files
Add-On Instructions are reusable code objects that contain encapsulated logic
that can streamline implementing your system. With this code, you can create
your own instruction set for programming logic as a supplement to the
instruction set provided natively in the ControlLogix® firmware. An Add-On
Instruction is defined once in each controller project, and can be instantiated
multiple times in your application code as needed.
Controller File
The P_PF52x_3_5-00_RUNG.L5X rung import must be imported into the
controller project to be used in the controller configuration. The service release
number (boldfaced) can change as service revisions are created.
Visualization Files
This Add-On Instruction has associated visualization files that provide a
common user interface. These files can be downloaded from the Product
Compatibility and Download Center at
http://www.rockwellautomation.com/rockwellautomation/support/pcdc.page.
IMPORTANT
The visualization file dependencies require Process Library content imports to
occur in a specific order as reflected in the following tables:
• Images
• Global Objects
• Standard Displays
• HMI Tags
• Macros
Images are external graphic files that can be used in displays. They must be
imported for FactoryTalk View to make use of them.
When PNG files are imported, they are renamed by FactoryTalk View with
a .bmp file extension, but retain a .png format.
Table 3 - Visualization Files: Images (.png)
FactoryTalk View SE Software FactoryTalk View ME Software Description
All .png files in the images folder All .png files in the images folder These are the common icons used in the global objects and
standard displays for all Process Objects.
The Global Object files (.ggfx file type) in the following table are Process Library
display elements that are created once and referenced multiple times on multiple
displays in an application. When changes are made to a Global Object, all
instances in the application are automatically updated.
Table 4 - Visualization Files: Global Objects (.ggfx)
FactoryTalk View SE Software FactoryTalk View ME Software Description
(RA-BAS) Common Faceplate Objects (RA-BAS-ME) Common Faceplate Objects Global objects used on process object faceplates.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 9
Page 10
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 4 - Visualization Files: Global Objects (.ggfx)
FactoryTalk View SE Software FactoryTalk View ME Software Description
(RA-BAS) P_VSD Graphics Library (RA-BAS-ME) P_VSD Graphics Library Drive global object device symbols used to build
(RA-BAS) Process Alarm Objects (RA-BAS-ME) Process Alarm Objects Global objects used for managing alarms on process
(RA-BAS) Process Diagnostic Objects (RA-BAS-ME) Process Diagnostic Objects Diagnostic global objects used on process object
(RA-BAS) Process Faceplate Motor Objects (RA-BAS-ME) Process Faceplate Motor Objects Motor global objects used on process object faceplates.
(RA-BAS) Process Help Objects (RA-BAS-ME) Process Help Objects Global objects used for all process objects help displays.
(RA-BAS) Process Interlock Objects (RA-BAS-ME) Process Interlock Objects Global objects used for managing interlocks and
(RA-BAS) Process Mode Objects (RA-BAS-ME) Process Mode Objects Global objects used for managing modes on process
process graphics.
object faceplates.
faceplates.
permissives on process object faceplates.
object faceplates.
The Standard Display files (.gfx file type) in the following table are the Process
Library displays that you see at runtime.
Table 5 - Visualization Files: Standard Displays (.gfx)
FactoryTalk View SE Software FactoryTalk View ME Software Description
(RA-BAS) Common-AnalogEdit N/A Faceplate used for analog input data entry. The FactoryTalk
(RA-BAS) P_Alarm-Faceplate (RA-BAS-ME) P_Alarm-Faceplate The faceplate that is used for managing alarms for
(RA-BAS) P_Alarm-Help (RA-BAS-ME) P_Alarm-Help Alarm Help information that is accessed from the
(RA-BAS) P_Mode-Config (RA-BAS-ME) P_Mode-Config The Configuration Display used to configure the
(RA-BAS) P_Mode-Help (RA-BAS-ME) P_Mode-Help Mode Help information that is accessed from the
(RA-BAS) P_PF52x-Faceplate (RA-BAS-ME) P_PF52x-Faceplate The faceplate that is used for the object
(RA-BAS) P_PF52x-Quick (RA-BAS-ME) P_PF52x-Quick The Quick display that is used for the object
(RA-BAS) Process Motor Family-Help (RA-BAS-ME) Process Motor Family-Help The Help display for Motor objects
(RA-BAS) P_Intlk-Faceplate (RA-BAS-ME) P_Intlk-Faceplate Optional
(RA-BAS) P_Perm-Faceplate (RA-BAS-ME) P_Perm-Faceplate Optional
(RA-BAS) P_ResInh-Faceplate (RA-BAS-ME) P_ResInh-Faceplate Optional
View ME faceplates use the native analog input data entry
so no file is required.
the object.
P_AIarm faceplate.
P_Mode object.
Help faceplate.
The interlock faceplate used for the object.
Use this file if your Discrete Output has an associated
P_Intlk object and you enable navigation to its faceplate
from the Discrete Output faceplate.
Permissive faceplate that is used for the object
Use this file if your object has an associated P_Perm object
and you enable navigation to the P_Perm faceplate from
the object faceplate.
Restart/inhibit faceplate display that is used for the object
Use this file if your object has an associated P_ResInh
object and you enable navigation to the P_ResInh
faceplate from the object faceplate.
10 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 11
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 5 - Visualization Files: Standard Displays (.gfx)
FactoryTalk View SE Software FactoryTalk View ME Software Description
(RA-BAS) P_RunTime-Faceplate (RA-BAS-ME) P_RunTime-Faceplate Optional
RunTime faceplate display that is used for the object
Use this file if your object has an associated P_RunTime
object and you enable navigation to the P_RunTime
faceplate from the object faceplate.
(RA-BAS) Process Interlock Family-Help (RA-BAS-ME) Process Interlock Family-Help Optional
Interlock/permissives help display that is used for
the object
Use this file if you use the P_Intlk or P_Perm faceplate.
HMI Tags are created in a FactoryTalk View ME application to support tab
switching on Process Library faceplates. The HMI tags may be imported via the
comma-separated values file (.csv file type) in the following table.
Table 6 - Visualization Files: HMI Tags (.csv)
FactoryTalk View SE Software FactoryTalk View ME Software Description
N/A FTVME_PlantPAxLib_Tags_3_5_xx.csv
where xx = the service release number.
These tags must be imported into the
FactoryTalk View ME project to support switching tabs on
any Process Object faceplate.
Controller Code
This section describes the parameter references for this Add-On Instruction.
PowerFlex 523/525 Variable Frequency Drives InOut Structure
InOut parameters are used to link the Add-On Instruction to external tags that
contain necessary data for the instruction to operate. These external tags must be
of the data type shown.
Table 8 - P_PF52x Drive InOut Parameters
Tag Name Data Type Description
Inp P_PF52x_Inp Common part of PowerFlex 52x input assembly.
Out P_PF52x_Out Common part of PowerFlex 52x output assembly.
Ref_FaultCodeList P_DescList[1] Array tag that contains a list of fault codes (DINT) and their descriptions (STRING).
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 11
Page 12
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
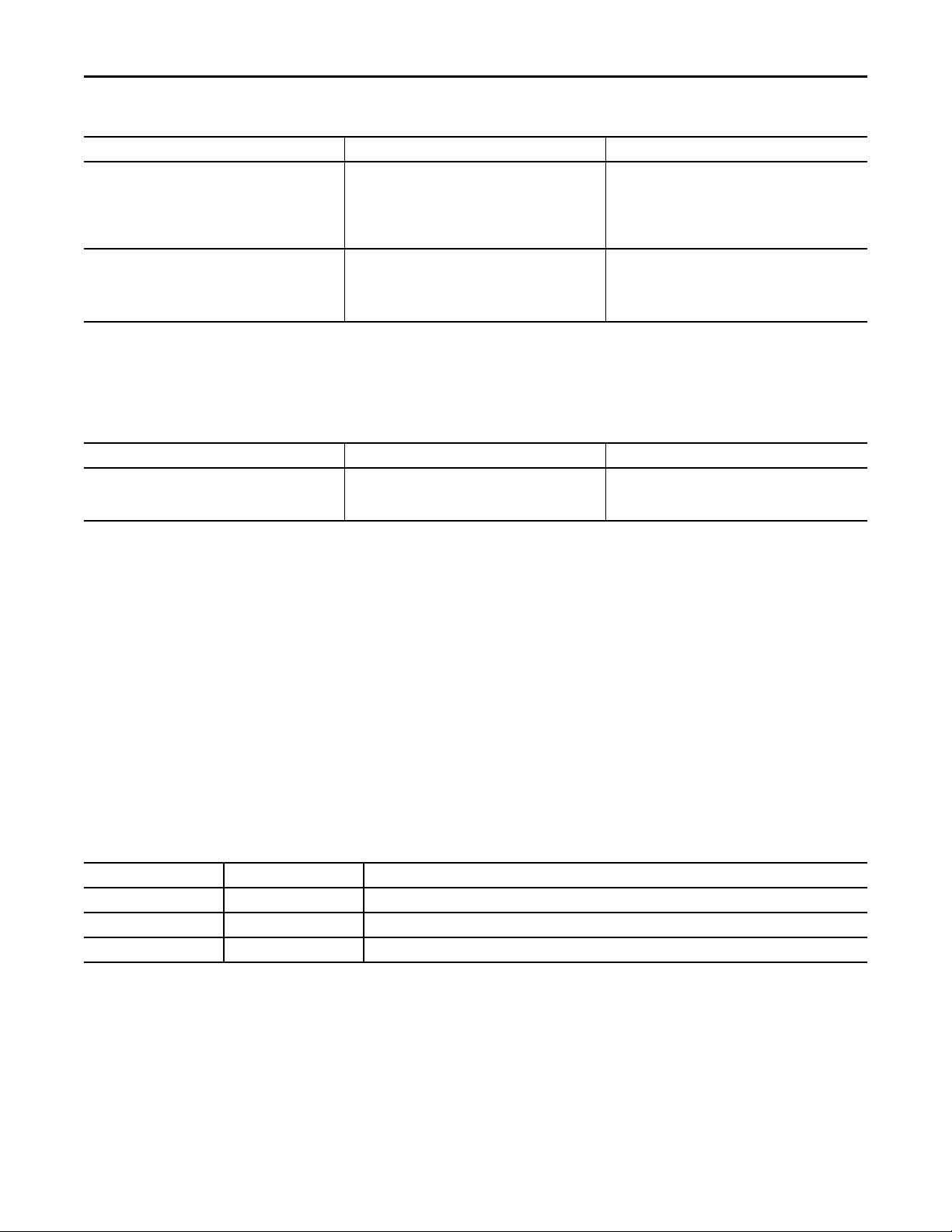
When the P_PF52x instruction is instantiated using the RUNG import, the
“PF525_FaultCodeList” tag shown in the following image, is included in the
import and created if it does not already exist. This tag is also included in the
Template applications that are included in the Library download.
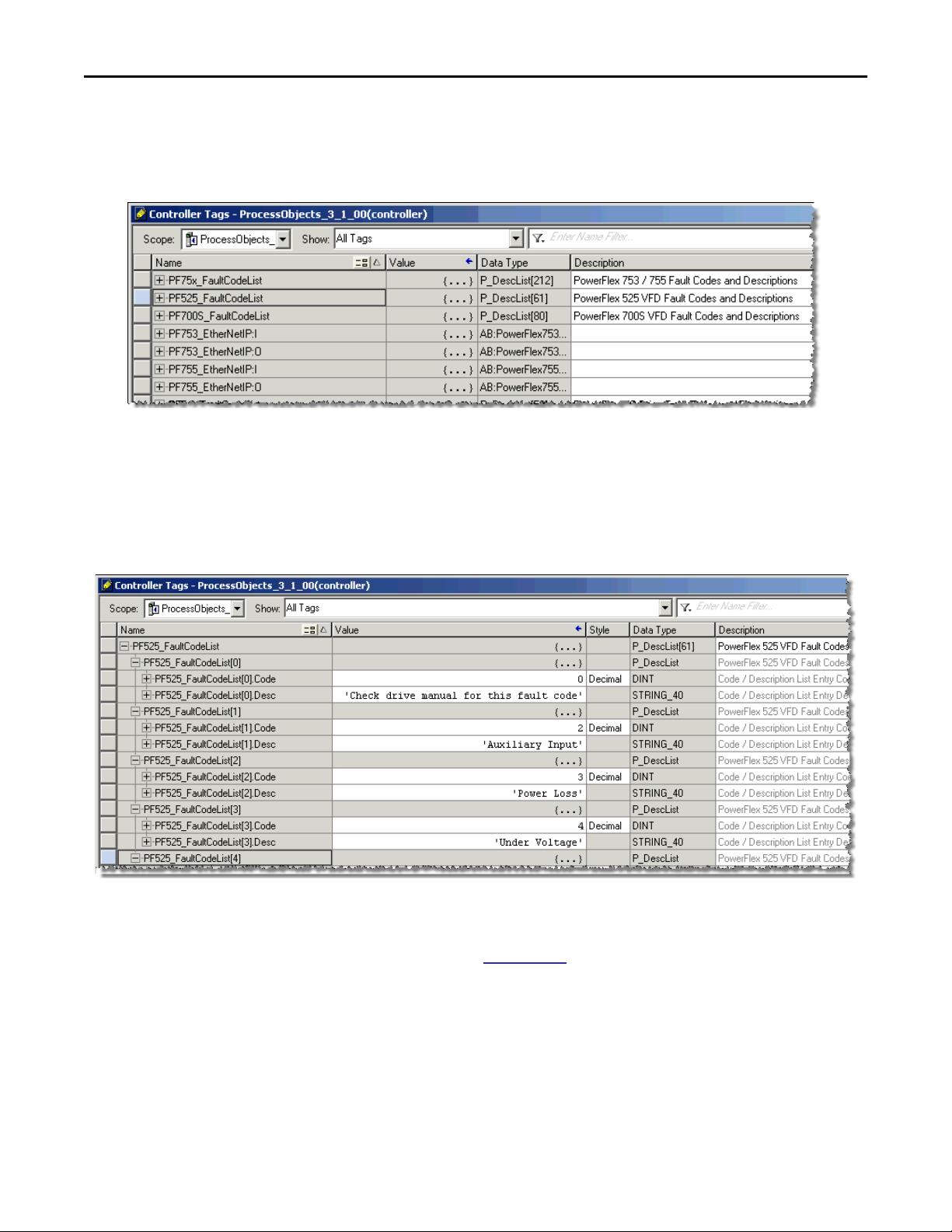
To display fault code messages in P_PF52x, enter the name of the Fault Code List
tag (first column) in the P_PF52x Ref_FaultCodeList parameter.
Each fault code list has preset codes and descriptions for translating fault code
numbers that are received from the drive to human-readable drive fault
descriptions.
For a complete list of Fault Codes for the PowerFlex 523/525 Variable Frequency
Drives, refer to the PowerFlex 520-series Adjustable Frequency AC Drives User
Manual, publication
12 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
520-UM001.
Page 13
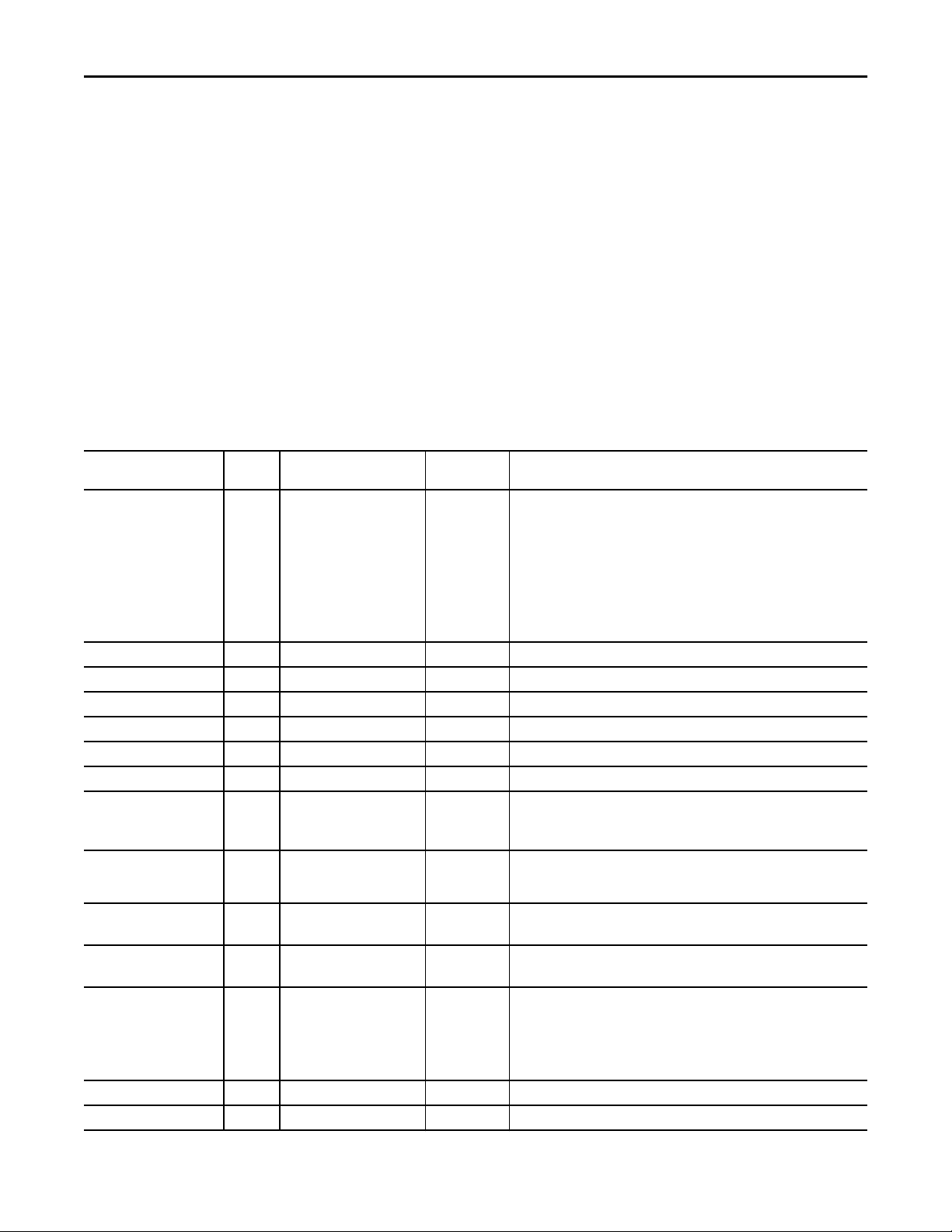
Table 9 - P_PF52x Drive Input Parameters
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
PowerFlex 523/525 Variable Frequency Drives Input Structure
Input parameters include the following:
• Input data elements (Inp_) are typically used to connect field inputs from
I/O modules or signals from other objects.
• Configuration data elements (Cfg_) are used to set configurable
capabilities and features of the instruction.
• Command data elements (PCmd_, OCmd_, MCmd_) are used by
program logic, operators, and maintenance personnel to request
instruction actions.
• Setting data elements (PSet_, OSet_, MSet_) are used by program logic,
operators, and maintenance personnel to establish runtime setpoints,
thresholds, and so forth. Set_ data elements (without a leading P, O, or M)
establish runtime settings regardless of role or mode.
Input Parameter Data
Type
EnableIn BOOL 1 Ladder Diagram:
Inp_FwdPermOK BOOL 1 1 = Permissives OK, drive can start Forward.
Inp_FwdNBPermOK BOOL 1 1 = Permissives (those that cannot be bypassed) OK, drive can start Forward.
Inp_RevPermOK BOOL 1 1 = Permissives OK, drive can start Reverse.
Inp_RevNBPermOK BOOL 1 1 = Non-bypassable Permissives OK, motor can start Reverse.
Inp_IntlkOK BOOL 1 1 = Interlocks OK, drive can start/run.
Inp_NBIntlkOK BOOL 1 1 = Non-bypassable Interlocks OK, drive can start/run.
Inp_IOFault BOOL 0 Input communication status:
Inp_Sim BOOL 0 Simulation input. When set to 1, the instruction keeps outputs de-energized
Inp_Hand BOOL 0 1 = Request to acquire Hand mode
Inp_Ovrd BOOL Mode.Inp_Ovrd 0 1 = Request to Acquire Override mode
Inp_OvrdCmd SINT 0 Override mode command:
Inp_OvrdSpeed REAL 0.0 Value to set Speed Reference in Override mode (SpeedRef engineering units).
Inp_Reset BOOL 0 1 = Reset drive fault conditions and latched Alarms.
Alias For Default Description
If the rung-in condition is true, the instruction’s Logic routine executes. If the
rung-in condition is false, the instruction’s EnableInFalse routine executes.
Function Block Diagram:
If true, or not connected, the instruction’s Logic routine executes. If the parameter
is exposed as a pin and wired, and the pin is false, the instruction’s EnableInFalse
routine executes.
Structured Text:
No effect. The instruction’s Logic routine executes.
0 = OK,
1 = fail
(zero) and simulates a working drive. When set to 0, the instruction operates the
drive normally.
0 = Release Hand mode
0 = Release Override mode
0 = None
1 = Stop
2 = Start Fwd
3 = Start Rev
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 13
Page 14
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
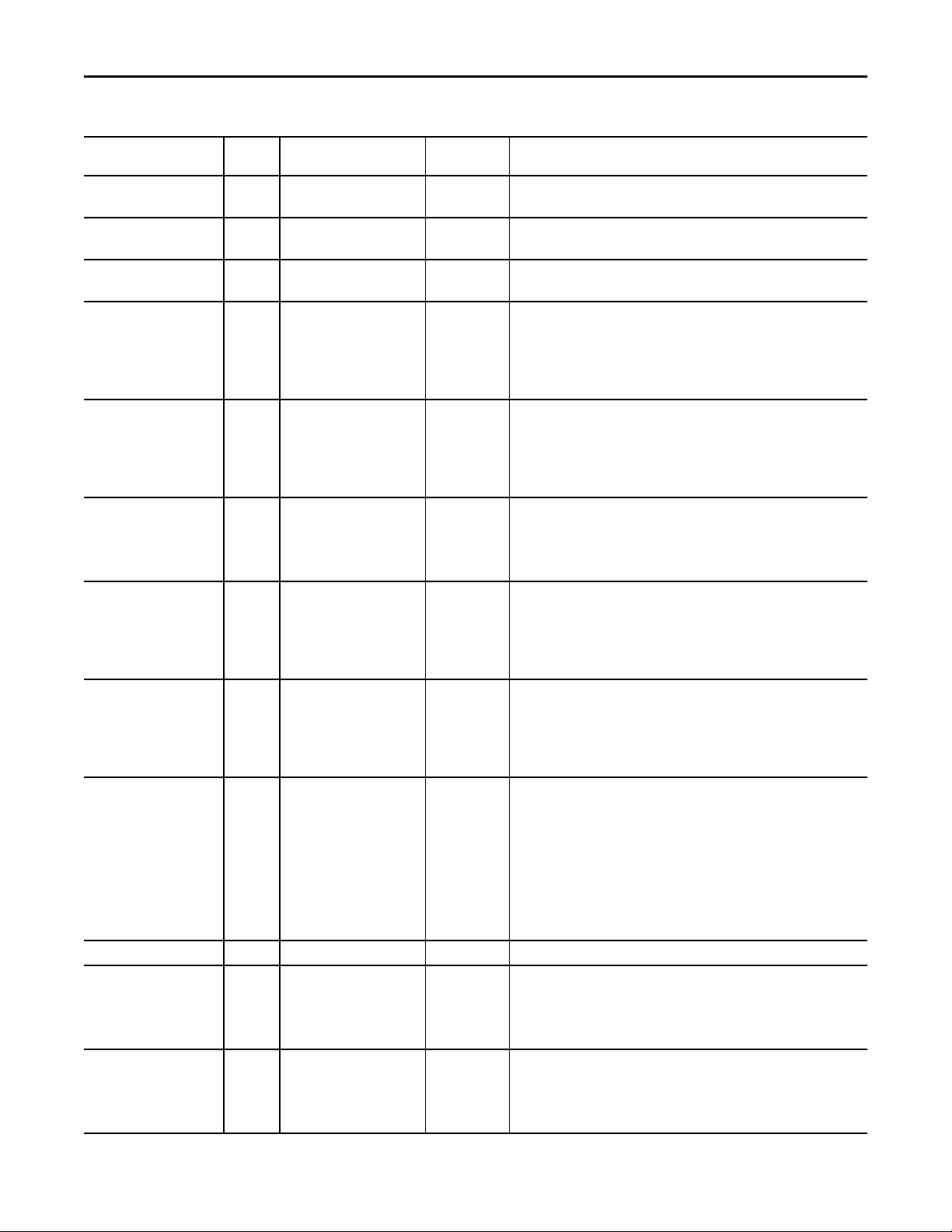
Table 9 - P_PF52x Drive Input Parameters
Input Parameter Data
Type
Cfg_HasReverse BOOL 0 1 = Drive can be run reverse.
Cfg_HasJog BOOL 0 1 = Drive Jog Command enabled/visible.
Cfg_AllowLocal BOOL 0 1 = Allow Local Start/Stop without alarm.
Cfg_HasFwdPermObj BOOL 0 1 = Tells HMI a forward permissive object (for example, P_Perm) is used for
Cfg_HasRevPermObj BOOL 0 1 = Tells HMI a reverse permissive object (for example, P_Perm) is used for
Cfg_HasIntlkObj BOOL 0 1 = Tells HMI an interlock object (for example, P_Intlk) is used for Inp_IntlkOK
Cfg_HasResInhObj BOOL 0 1 = Tells HMI a restart inhibit object (for example, P_ResInh) is connected and
Cfg_HasRunTimeObj BOOL 0 1 = Tells HMI a runtime object (for example, P_RunTime) is connected and
Cfg_SetTrack BOOL 1 This parameter is used to set up bumpless behavior of setting parameters when
Cfg_SetTrackOvrdHand BOOL 0 1 = Program/Operator settings track Override/Hand mode settings.
Cfg_PCmdClear BOOL Mode.Cfg_PCmdClear 1 When this parameter is 1, program commands are cleared once they are acted
Cfg_ProgDefault BOOL Mode.Cfg_ProgDefault 0 This parameter defines the default mode. When this parameter is 1, the mode
Alias For Default Description
0 = Forward only.
0 = Drive Jog Command not allowed.
0 = Start/Stop from HMI/program only.
Inp_FwdPermOK and navigation to the permissive object’s faceplate is enabled.
IMPORTANT: The name of the Forward Permissive object in the controller must
be this object's name with the suffix ‘_FwdPerm’. For example, if your P_PF52x
object has the name ’PF52x123’, then its Forward Permissive object must be
named ‘PF52x123_FwdPerm’.
Inp_RevPermOK and navigation to the permissive object’s faceplate is enabled.
IMPORTANT: The name of the Reverse Permissive object in the controller must
be this object's name with the suffix ‘_RevPerm’. For example, if your P_PF52x
object has the name ’PF52x123’, then its Reverse Permissive object must be
named ‘PF52x123_RevPerm’.
and navigation to the interlock object’s faceplate is enabled.
IMPORTANT: The name of the Interlock object in the controller must be this
object's name with the suffix ‘_Intlk’. For example, if your P_PF52x object has the
name ’PF52x123’, then its Interlock object must be named ‘PF52x123_Intlk’.
navigation to the restart inhibit object’s faceplate is enabled.
IMPORTANT: The name of the Restart Inhibit object in the controller must be this
object's name with the suffix ‘_ResInh’. For example, if your P_PF52x object has
the name ’PF52x123’, then its Restar t Inhibit object must be named
‘PF52x123_ResInh’.
navigation to the runtime object’s faceplate is enabled.
IMPORTANT: The name of the runtime object in the controller must be this
object's name with the suffix ‘_RunTime’. For example, if your P_PF52x object has
the name ‘PF52x123’, then its runtime object must be named
‘PF52x123_RunTime’.
switching modes.
When this parameter is 1:
• In Program mode the operator settings track the program settings.
• In Operator mode the program settings track the operator settings.
• The simulation inputs match the output values (transitions are bumpless).
When this parameter is 0, the operator settings and program settings are not
modified by this instruction. In this case, when the mode is changed, the effective
value of the setting can change depending on the program-set and operator-set
values.
upon. When set to 0, program commands remain set until cleared by the
application program logic.
IMPORTANT: Clearing this parameter online can cause unintended program
command execution.
defaults to Program if no mode is being requested. When this parameter is 0, the
mode defaults to Operator if no mode is being requested.
IMPORTANT: Changing this parameter online can cause unintended mode
changes.
14 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 15
Table 9 - P_PF52x Drive Input Parameters
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Input Parameter Data
Type
Cfg_OperStopPrio BOOL 0 1 = OCmd_Stop has priority, accepted any time. If OCmd_Stop stops the drive in
Cfg_OCmdResets BOOL 0 1 = New Operator drive command resets fault.
Cfg_OvrdPermIntlk BOOL 0 1 = Override ignores Bypassable Permissive/ Interlock.
Cfg_ShedOnFailToStart BOOL 1 1 = Stop motor and alarm on Fail to Start.
Cfg_ShedOnIOFault BOOL 1 1 = Stop motor and alarm on I/O Fault.
Cfg_SimScaleEU BOOL 0 If Cfg_SimScaleEU = 1, in simulation, scale Speed Ref engineering units to Speed
Cfg_SimScaleRaw
Cfg_HasFailToStartAlm BOOL FailToStart.Cfg_Exists 0 These parameters determine whether the corresponding alarm exists and is
Cfg_HasFailToStopAlm FailToStop.Cfg_Exists
Cfg_HasIntlkTripAlm IntlkTrip.Cfg_Exists
Cfg_HasDriveFaultAlm DriveFault.Cfg_Exists
Cfg_HasIOFaultAlm IOFault.Cfg_Exists
Cfg_FailToStartResetReqd BOOL FailToStart.Cfg_ResetReqd 0 These parameters determine whether a reset is required to clear the alarm status.
Cfg_FailToStopResetReqd FailToStop.Cfg_ResetReqd
Cfg_IntlkTripResetReqd IntlkTrip.Cfg_ResetReqd
Cfg_DriveFaultResetReqd DriveFault.Cfg_ResetReqd
Cfg_IOFaultResetReqd IOFault.Cfg_ResetReqd
Cfg_FailToStartAckReqd BOOL FailToStart.Cfg_AckReqd 1 These parameters determine whether an acknowledgement is required for an
Cfg_FailToStopAckReqd FailToStop.Cfg_AckReqd
Cfg_IntlkTripAckReqd IntlkTrip.Cfg_AckReqd
Cfg_DriveFaultAckReqd DriveFault.Cfg_AckReqd
Cfg_IOFaultAckReqd IOFault.Cfg_AckReqd
Alias For Default Description
a mode other than Maintenance or Operator, a reset is required to start.
0 = OCmd_Stop only in Operator or Maintenance mode.
0 = Reset required to clear fault.
0 = Always use Permissive/ Interlock.
0 = Alarm only on Fail to Start.
IMPORTANT: If a condition is configured to shed the device to the Stopped state
on a fault, a reset is required to clear the shed fault. The drive can now be
commanded to a state other than Stopped.
0 = Alarm only on I/O Fault.
IMPORTANT: If a condition is configured to shed the device to the Stopped state
on a fault, a reset is required to clear the shed fault. The drive can now be
commanded to a state other than Stopped.
feedback engineering units.
If Cfg_SimScaleRaw = 1, in simulation, scale Speed Ref engineering units to raw,
then raw to Speed feedback engineering units.
If both of these parameters are zero, the simulated speed reference is ramped to
the simulated speed feedback without scaling.
checked or if the alarm does not exist and is not used. When these parameters are
1, the corresponding alarm exists.
When these parameters are 1, the alarm is latched ON when the alarm occurs.
After the alarm condition returns to normal, a reset is required to clear the alarm
status. For example, OCmd_Reset, Inp_Reset, or Drivefault.OCmd_Reset are
required to clear Alm_DriveFault alarm after the alarm is set and the value
returns to normal. When these parameters are 0, no reset is required and the
alarm status is cleared when the alarm condition returns to normal.
IMPORTANT: If the reset clears the alarm, it also acknowledges the alarm.
alarm. When these parameters are 1, the acknowledge (ack) bit is cleared when
the alarm occurs. An acknowledge command (for example, PCmd_FailAck or
Fail.OCmd_Ack) is required to acknowledge the alarm. When set to 0, the
Acknowledge bit is set when an alarm occurs indicating an acknowledged alarm
and no acknowledge command is required.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 15
Page 16
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 9 - P_PF52x Drive Input Parameters
Input Parameter Data
Type
Cfg_FailToStartSeverity INT FailToStart.Cfg_Severity 1000 These parameters determine the severity of each alarm. The severity drives the
Cfg_FailToStopSeverity FailToStop.Cfg_Severity
Cfg_IntlkTripSeverity IntlkTrip.Cfg_Severity 250
Cfg_DriveFaultSeverity DriveFault.Cfg_Severity 1000
Cfg_IOFaultSeverity IOFault.Cfg_Severity
Cfg_MinSpdRef REAL 0.0 Minimum Speed Reference in engineering units (for limiting).
Cfg_MaxSpdRef REAL 60.0 Maximum Speed Reference in engineering units (for limiting).
Cfg_SpeedRefRawMin DINT 0 Speed Reference Minimum in Drive (raw) Units (for scaling).
Cfg_SpeedRefRawMax DINT 6000 Speed Reference Maximum in Drive (raw) Units (for scaling).
Cfg_SpeedRefEUMin REAL 0.0 Speed Reference Minimum in Engineering Units (for scaling).
Cfg_SpeedRefEUMax REAL 60.0 Speed Reference Maximum in Engineering Units (for scaling).
Cfg_SpeedFdbkRawMin DINT 0 Speed Feedback Minimum in Drive (raw) Units (for scaling).
Cfg_SpeedFdbkRawMax DINT 6000 Speed Feedback Maximum in Drive (raw) Units (for scaling).
Cfg_SpeedFdbkEUMin REAL 0.0 Speed Feedback Minimum in Engineering Units (for scaling).
Cfg_SpeedFdbkEUMax REAL 60.0 Speed Feedback Maximum in Engineering Units (for scaling).
Cfg_SimRampT DINT 10 Time to ramp speed feedback when in Simulation (seconds).
Cfg_FailToStartT DINT 15 Time after Start to get Run Feedback before Fault (seconds).
Cfg_FailToStopT DINT 15 Time after Stop to drop Run Feedback before Fault (seconds).
Cfg_ResetPulseT DINT 2 Time to pulse Out_Reset to clear drive fault (seconds).
Cfg_MaxJogT REAL 0.0 Maximum jog time (seconds, 0 = unlimited).
Cfg_OperKeep SINT 2#0000_0000 1 = Operator keeps control in Program mode:
Cfg_ProgKeep SINT 2#0000_0000 1 = Program keeps control in Operator mode:
PSet_SpeedRef REAL 0.0 Program setting of speed reference (engineering units).
PSet_Owner DINT 0 Program owner request ID (nonzero) or release (zero).
OSet_SpeedRef REAL 0.0 Operator setting of speed reference (engineering units).
Alias For Default Description
color and symbol that are used to indicate alarm status on the faceplate and
global object.
The following are valid values:
1…250 = Low
251…500 = Medium
501…750 = High
751…1000 = Urgent
IMPORTANT: For FactoryTalk View software version 7.0, these severity
parameters drive the indication only on the global object and faceplate. The
Alarms and Events definition of severity drives the color and symbol that is used
on the alarm banner and alarm summary. The definition also drives the value
returned by FactoryTalk Alarms and Events display commands.
Bit .0 = Reference
Bit .1 = Start/Stop
Bit .2 = Forward/Reverse
Bit .0 = Reference
Bit .1 = Start/Stop
Bit .2 = Forward/Reverse
16 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 17

Table 9 - P_PF52x Drive Input Parameters
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Input Parameter Data
Type
PCmd_Start BOOL 0 When Cfg_PCmdClear is 1:
PCmd_Stop
PCmd_Fwd
PCmd_Rev
PCmd_Acq BOOL Mode.PCmd_Acq 0 When Cfg_PCmdClear is 1:
PCmd_Rel Mode.PCmd_Rel
PCmd_Lock BOOL Mode.PCmd_Lock 0 When Cfg_PCmdClear is 1:
PCmd_Unlock Mode.PCmd_Unlock
PCmd_Reset BOOL 0 • Set PCmd_Reset to 1 to reset all alarms that require reset
PCmd_FailToStartAck BOOL FailToStart.PCmd_Ack 0 • Set PCmd_<Alarm>Ack to 1 to Acknowledge alarm
PCmd_FailToStopAck FailToStop.PCmd_Ack
PCmd_IntlkTripAck IntlkTrip.PCmd_Ack
PCmd_DriveFaultAck DriveFault.PCmd_Ack
PCmd_IOFaultAck IOFault.PCmd_Ack
PCmd_FailToStartSuppress BOOL FailToStart.PCmd_Suppress 0 When Cfg_PCmdClear is 1:
PCmd_FailToStopSuppress FailToStop.PCmd_Suppress
PCmd_IntlkTripSuppress IntlkTrip.PCmd_Suppress
PCmd_DriveFaultSuppress DriveFault.PCmd_Suppress
PCmd_IOFaultSuppress IOFault.PCmd_Suppress
PCmd_FailToStartUnsuppress BOOL FailToStart.PCmd_Unsuppress 0
PCmd_FailToStopUnsuppress FailToStop.PCmd_Unsuppress
PCmd_IntlkTripUnsuppress IntlkTrip.PCmd_Unsuppress
PCmd_DriveFaultUnsuppress DriveFault.PCmd_Unsuppress
PCmd_IOFaultUnsuppress IOFault.PCmd_Unsuppress
Alias For Default Description
• Set PCmd_Start to 1 to start the Drive
• Set PCmd_Fwd to 1 to run the drive in the forward direction
• Set PCmd_Rev to 1 to run the motor in the reverse direction
• Set PCmd_Stop to 1 to stop the drive
• These parameters are reset automatically
When Cfg_PCmdClear is 0:
• Set PCmd_Start to 1 to start the drive
• Set PCmd_Rev to 0 to run the drive in the forward direction
• Set PCmd_Rev to 1 to run the drive in the reverse direction
• Set PCmd_Start to 0 to stop the drive
• PCmd_Stop and PCmd_Fwd are not used
• These parameters do not reset automatically
• Set PCmd_Acq to 1 to Acquire
• Set PCmd_Rel to 1 to Release
• These parameters reset automatically
When Cfg_PCmdClear is 0:
• Set PCmd_Acq to 1 to Acquire
• Set PCmd_Acq to 0 to Release
• PCmd_Rel is not used
• These parameters do not reset automatically
• Set PCmd_Lock to 1 to Lock
• Set PCmd_Unlock to 1 to Unlock
• These parameters reset automatically
When Cfg_PCmdClear is 0:
• Set PCmd_Lock to 1 to Lock
• Set PCmd_Lock to 0 to Unlock
• PCmd_Unlock is not used
• These parameters do not reset automatically
• This parameter is always reset automatically
• The parameter is reset automatically
• Set PCmd_<Alarm>Suppress to 1 to suppress alarm
• Set PCmd_<Alarm>Unsuppress to 1 to unsuppress alarm
• These parameters reset automatically
When Cfg_PCmdClear is 0:
• Set PCmd_<Alarm>Suppress to 1 to suppress alarm
• Set PCmd_<Alarm>Suppress to 0 to unsuppress alarm
• PCmd_<Alarm>Unsuppress is not used
• These Parameters do not reset automatically
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 17
Page 18
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 9 - P_PF52x Drive Input Parameters
Input Parameter Data
Type
PCmd_FailToStartUnshelve BOOL FailToStart.PCmd_Unshelve 0 • Set PCmd_<Alarm>Unshelve to 1 to Unshelve alarm
PCmd_FailToStopUnshelve FailToStop.PCmd_Unshelve
PCmd_IntlkTripUnshelve IntlkTrip.PCmd_Unshelve
PCmd_DriveFaultUnshelve DriveFault.PCmd_Unshelve
PCmd_IOFaultUnshelve IOFault.PCmd_Unshelve
OCmd_Start BOOL 0 Operator command to start drive.
OCmd_Stop BOOL 0 Operator command to stop drive.
OCmd_Jog BOOL 0 Operator command to jog drive (not cleared by instruction if Cfg_MaxJogT = 0).
OCmd_Fwd BOOL 0 Operator command to set direction to Forward.
OCmd_Rev BOOL 0 Operator command to set direction to Reverse.
OCmd_Bypass BOOL 0 Operator command to bypass all interlocks and permissives that can be bypassed.
OCmd_Check BOOL 0 Operator command to check (not bypass) all interlocks and permissives.
MCmd_Disable BOOL 0 Maintenance command to disable drive.
MCmd_Enable BOOL 0 Maintenance command to enable (allow to run) drive.
MCmd_Acq BOOL Mode.MCmd_Acq 0 Maintenance command to acquire ownership (Operator/Program/Override to
MCmd_Rel BOOL Mode.MCmd_Rel 0 Maintenance command to release ownership (Maintenance to Operator/
OCmd_AcqLock BOOL Mode.OCmd_AcqLock 0 Operator command to acquire (Program to Operator)/lock ownership.
OCmd_Unlock BOOL Mode.OCmd_UnlockRel 0 Operator command to unlock/release (Operator to Program) ownership.
OCmd_Reset BOOL 0 Operator command to reset all alarms that require reset and trigger a drive reset if
OCmd_ResetAckAll BOOL 0 Operator command to acknowledge and reset all alarms and latched Shed
Alias For Default Description
• The parameter is reset automatically
Maintenance).
Program/Override).
the drive is faulted.
conditions.
18 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 19
Table 10 - P_PF52x Drives Output Parameters
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
PowerFlex 523/525 Variable Frequency Drives Output Structure
Output parameters include the following:
• Value data elements (Val_) are numeric outputs of the instruction for use
by the HMI. Values can also be used by other application logic or software
packages.
• Source and Quality data elements (SrcQ_) are outputs of the instruction
that is used by the HMI to indicate PV source and quality.
• Status data elements (Sts_) are bit outputs of the instruction for use by the
HMI. Status bits can also be used by other application logic.
• Error data elements (Err_) are outputs of the instruction that indicate a
particular configuration error. If any Err_ bit is set, then the Sts_Err
configuration error summary status is set and the Invalid Configuration
indicator is displayed on the HMI.
• Not Ready data elements (Nrdy_) are bit outputs of the instruction for use
by the HMI for displaying the Device Not Ready indicator. Status bits can
also be used by other application logic.
• Alarm data elements (Alm_) are outputs of the instruction that indicate a
particular alarm has occurred.
• Acknowledge data elements (Ack_) are outputs of the instruction that
indicate the corresponding alarm has been acknowledged.
• Ready data elements (Rdy_) are bit outputs of the instruction used by the
HMI to enable or disable Command buttons and Setting entry fields.
Output Parameter Data Type Alias For Description
EnableOut BOOL Enable Output: The EnableOut signal is not manipulated by this instruction. Its output state
Val_SpeedRef REAL Speed Reference (target) to drive (Speed Reference engineering units).
Val_SpeedFdbk REAL Speed Feedback (actual) from drive (Speed Feedback engineering units).
Val_SpeedRefRaw REAL Copy of Speed Reference Output (in Raw units) for faceplate.
Val_SpeedFdbkRaw REAL Copy of Speed Feedback Input (in Raw units) for faceplate.
Val_SpeedRefEUMin REAL Minimum of Speed Reference = Min (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax).
Val_SpeedRefEUMax REAL Maximum of Speed Reference = Max (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax).
Val_SpeedFdbkEUMin REAL Minimum of Speed Feedback = Min (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax).
Val_SpeedFdbkEUMax REAL Maximum of Speed Feedback = Max (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax).
Val_LastFaultCode DINT Last drive fault code (enumeration).
Val_OutCurrent REAL Drive output current (Amps).
Val_OutPower REAL Drive output power (kW).
always reflects EnableIn Input state.
(Engineering units)
(Engineering units)
(Engineering units)
(Engineering units)
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 19
Page 20
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 10 - P_PF52x Drives Output Parameters
Output Parameter Data Type Alias For Description
SrcQ_IO SINT I/O signal source and quality.
SrcQ Final drive status source and quality:
GOOD 0 = I/O live and confirmed good quality
1 = I/O live and assumed good quality
2 = No feedback configured, assumed good quality
TEST 8 = Device simulated
9 = Device loopback simulation
10 = Manually entered value
UNCERTAIN 16 = Live input, off-specification
17 = Value substituted at device/bus
18 = Value substituted by maintenance (Has and not Use)
19 = Shed, using last good value
20 = Shed, using replacement value
BAD 32 = Signal failure (out-of-range, NaN, invalid combination)
33 = I/O channel fault
34 = I/O module fault
35 = Bad I/O configuration (for example, scaling parameters)
Val_Cmd SINT Device command:
0 = None
1 = Stop
2 = Start forward
3 = Start reverse
4 = Jog forward
5 = Jog reverse
Val_Fdbk SINT Device feedback:
0 = Stopped
1 = Running forward
2 = Running reverse
3 = Accelerating
4 = Decelerating
Val_Sts SINT Device Confirmed Status:
0= Powerup/Unknown
1 = Stopped
2 = Running forward
3 = Running reverse
4 = Jogging forward
5 = Jogging reverse
6 = Stopping
7 = Starting forward
8 = Starting reverse
33 = Disabled
Val_Fault SINT Device fault status:
0 = None
16 = Fail to Start
17 = Fail to Stop
18 = Drive Fault
32 = I/O Fault
34 = Configuration Error
20 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 21

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 10 - P_PF52x Drives Output Parameters
Output Parameter Data Type Alias For Description
Val_Mode SINT Mode.Val The current mode is shown with status bits and also as an enumeration ‘Val_Mode’ as follows:
0 = No mode
1 = Hand
2 = Maintenance
3 = Override
4 = Program (locked)
5 = Operator (locked)
6 = Program (unlocked, Operator is default)
7 = Operator (unlocked, Program is default)
8 = Program (unlocked, Program is default)
9 = Operator (unlocked, Operator is default)
Val_Owner DINT Current Object Owner ID (0 = not owned).
Val_Notify SINT Current alarm level and acknowledgement (enumeration):
0 = No alarm
1 = Alarm cleared: a reset or acknowledge is required
2 = Low (acknowledged)
3 = Low (unacknowledged)
4 = Medium (acknowledged)
5 = Medium (unacknowledged)
6 = High (acknowledged)
7 = High (unacknowledged)
8 = Urgent (acknowledged)
9 = Urgent (unacknowledged)
Sts_Stopped BOOL 1 = Drive requested to stop and is confirmed stopped.
Sts_Starting BOOL 1 = Drive requested to run and is waiting run for feedback.
Sts_Running BOOL 1 = Drive requested to run and is confirmed running.
Sts_Stopping BOOL 1 = Drive requested to stop and is waiting for stopped feedback.
Sts_Jogging BOOL 1 = Drive requested to jog.
Sts_CommandDir BOOL 1 = Drive commanded to Forward.
0 = Reverse.
Sts_ActualDir BOOL 1 = Drive actual direction is Forward.
0 = Reverse.
Sts_Accel BOOL 1 = Drive is accelerating.
Sts_Decel BOOL 1 = Drive is decelerating.
Sts_NotReady BOOL 1 = Drive is Not Ready (cannot be started), check alarms, stops, faults.
Sts_AtSpeed BOOL 1 = Drive is running at reference speed.
Sts_SpeedLimited BOOL 1 = Speed Reference setting exceeds configured Max/Min limit.
Sts_Digin1 BOOL Drive Digital Input 1 Status
Sts_Digin2 BOOL Drive Digital Input 2 Status
Sts_Digin3 BOOL Drive Digital Input 3 Status
Sts_Digin4 BOOL Drive Digital Input 4 Status
Sts_Available BOOL 1 = Drive available for control by automation (Program).
Sts_Bypass BOOL 1 = Interlocks and Permissives that can be bypassed are bypassed.
Sts_BypActive BOOL 1 = Bypassing active (Bypassed or Maintenance).
Sts_Disabled BOOL 1 = Drive is disabled.
Sts_NotRdy BOOL 1 = Motor is Not Ready to Run (independent of mode), check interlocks and permissives.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 21
Page 22

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 10 - P_PF52x Drives Output Parameters
Output Parameter Data Type Alias For Description
Nrdy_Disabled BOOL 1 = Device Not Ready:
Nrdy_CfgErr
Nrdy_Intlk
Nrdy_Perm
Nrdy_OperPrio
Nrdy_Fail
Nrdy_IOFault
Nrdy_Trip
Nrdy_DriveNR
Nrdy_NoMode
Sts_MaintByp BOOL 1 = A Maintenance Bypass is active, display icon.
Sts_AlmInh BOOL 1 = An alarm is Shelved, Disabled or Suppressed, display icon.
Sts_Err BOOL 1 = Error in configuration: see detail bits for reason.
Err_Timer BOOL 1 = Error in configuration: Invalid Check or Reset Pulse Time (use 0…2,147,483).
Err_Sim BOOL 1 = Error in configuration: simulation timer preset: use 0…2,147,483).
Err_Alarm BOOL 1 = Error in configuration: Alarm Minimum On time or severity.
Err_FdbkRaw BOOL 1 = Error in configuration: Speed feedback raw minimum = maximum.
Err_FdbkEU BOOL 1 = Error in configuration: Speed feedback engineering units minimum = maximum.
Err_RefLim BOOL 1 = Error in configuration: Speed Ref Limit minimum > maximum.
Err_RefEU BOOL 1 = Error in configuration: Speed Ref engineering units minimum = maximum.
Err_RefRaw BOOL 1 = Error in configuration: Speed Ref Raw minimum = maximum.
Sts_Hand BOOL Mode.Sts_Hand 1 = Mode is Hand (supersedes Operator, Program, Override, and Maintenance).
Sts_Maint BOOL Mode.Sts_Maint 1 = Mode is Maintenance (supersedes Operator, Program, and Override).
Sts_Ovrd BOOL Mode.Sts_Ovrd 1 = Mode is Override (supersedes Operator and Program).
Sts_Prog BOOL Mode.Sts_Prog 1 = Mode is Program (automatic).
Sts_Oper BOOL Mode.Sts_Oper 1 = Mode is Operator (manual).
Sts_ProgOperLock BOOL Mode.Sts_ProgOperLock 1 = Program or operator has requested mode Lock.
Sts_NoMode BOOL Mode.Sts_NoMode 1 = No mode (disabled because EnableIn is False).
Sts_MAcqRcvd BOOL Mode.Sts_MAcqRcvd 1 = Maintenance Acquire command received this scan.
Sts_FailToStart BOOL FailToStart.Inp 1 = Drive failed to start.
Sts_FailToStop FailToStop.Inp 1 = Drive failed to stop.
Sts_IntlkTrip IntlkTrip.Inp 1 = Drive was stopped by an Interlock Not OK (One-Shot).
Sts_DriveFault DriveFault.Inp 1 = Drive Fault (see drive display or manual).
Sts_IOFault IOFault.Inp I/O Comm Fault Status:
• Device Disabled by Maintenance
• Configuration Error
• Interlock Not OK
• Permissive Not OK
• Operator Stop Priority Command Requires Reset
• Device Failure (Shed Requires Reset)
• I/O Fault (Shed Requires Reset)
• Device Tripped (Drive Fault)
• Drive Not Ready
• Device Logic Disabled/NO Mode
0 = OK
1 = Bad)
22 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 23

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 10 - P_PF52x Drives Output Parameters
Output Parameter Data Type Alias For Description
Alm_FailToStart BOOL FailToStart.Alm 1 = Drive Fail to Start alarm.
Alm_FailToStop FailToStop.Alm 1 = Drive Fail to Stop alarm.
Alm_IntlkTrip IntlkTrip.Alm 1 = Alarm: Drive stopped by an Interlock Not OK.
Alm_DriveFault DriveFault.Alm 1 = Alarm: Drive Fault (see drive display or manual).
Alm_IOFault IOFault.Alm 1 = I/O Fault alarm.
Ack_FailToStart BOOL FailToStart.Ack 1 = Fail to Start, Fail to Stop, Interlock Trip, Drive Fault, or I/O Fault alarm has been
Ack_FailToStop FailToStop.Ack
Ack_IntlkTrip IntlkTrip.Ack
Ack_DriveFault DriveFault.Ack
Ack_IOFault IOFault.Ack
Sts_FailToStartDisabled BOOL FailToStart.Disabled 1 = Fail to Start, Fail to Stop, Interlock Trip, Drive Fault, or I/O Fault alarm has been disabled (by
Sts_FailToStopDisabled FailToStop.Disabled
Sts_IntlkTripDisabled IntlkTrip.Disabled
Sts_DriveFaultDisabled DriveFault.Disabled
Sts_IOFaultDisabled IOFault.Disabled
Sts_FailToStartShelved BOOL FailToStart.Shelved 1 = Fail to Start, Fail to Stop, Interlock Trip, Drive Fault, or I/O Fault alarm has been shelved (by
Sts_FailToStopShelved FailToStop.Shelved
Sts_IntlkTripShelved IntlkTrip.Shelved
Sts_DriveFaultShelved DriveFault.Shelved
Sts_IOFaultShelved IOFault.Shelved
Sts_FailToStartSuppressed BOOL FailToStart.Suppressed 1 = Fail to Start, Fail to Stop, Interlock Trip, Drive Fault, or I/O Fault alarm has been suppressed
Sts_FailToStopSuppressed FailToStop.Suppressed
Sts_IntlkTripSuppressed IntlkTrip.Suppressed
Sts_DriveFaultSuppressed DriveFault.Suppressed
Sts_IOFaultSuppressed IOFault.Suppressed
Rdy_Start BOOL 1 = Ready to receive OCmd: Start, Stop, Jog, Forward, Reverse, Bypass, or Check (enables HMI
Rdy_Stop
Rdy_Jog
Rdy_Fwd
Rdy_Rev
Rdy_Bypass
Rdy_Check
Rdy_Disable BOOL 1 = Ready to receive MCmd Disable or Enable (enables HMI button).
Rdy_Enable
Rdy_Reset BOOL 1 = Ready to receive OCmd_Reset (enables HMI button).
Rdy_ResetAckAll BOOL 1 = At least one alarm or latched Shed condition requires Reset or Acknowledged.
Rdy_SpeedRef BOOL 1 = Ready to receive OSet_SpeedRef (enables data entry field).
P_PF52x BOOL Unique Parameter Name for auto-discovery.
acknowledged.
maintenance).
operator).
(by program).
button).
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 23
Page 24

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
PowerFlex 523/525 Variable Frequency Drives Local Configuration Tags
Configuration parameters that are array, string, or structure data types cannot be
configured as parameters for Add-On Instructions. Configuration parameters of
these types appear as local tags to the Add-On Instruction. Local tags can be
configured through the HMI faceplates or in Studio 5000 Logix Designer®
application. Open the instruction logic of the Add-On Instruction instance and
then open the Data Monitor on a local tag to accomplish this configuration.
These parameters cannot be modified by using controller logic or Logix Designer
export/import functionality.
Table 11 - P_PF52x Drive Local Configuration Tags
Tag Name Data Type Default Description
Cfg_Desc STRING_40 'PF523/PF525 Variable
Frequency Drive'
Cfg_Digin1Txt STRING_20 'Digital Input 1' Name for digital input 1 label.
Cfg_Digin2Txt STRING_20 'Digital Input 2' Name for digital input 2 label.
Cfg_Digin3Txt STRING_20 'Digital Input 3' Name for digital input 3 label.
Cfg_Digin4Txt STRING_20 'Digital Input 4' Name for digital input 4 label.
Cfg_FwdText STRING_16 'Forward' Name for for ward direction, for example, ‘Up’, or ‘Forward’.
Cfg_Label STRING_20 'Motor Speed Control' Label for graphic symbol that is displayed on HMI. This string appears on the graphic symbol.
Cfg_RevText STRING_16 'Reverse' Name for reverse direction, for example, ‘Down’ or ‘Reverse’.
Cfg_SpeedFdbkEU STRING_8 'Hz' Speed feedback engineering units for display on HMI.
Cfg_SpeedRefEU STRING_8 'Hz' Speed reference engineering units for display on HMI.
Cfg_Tag STRING_20 'P_PF52x' Tag name for display on HMI. This string is shown in the title bar of the faceplate.
Description for display on HMI. This string is shown in the title bar of the faceplate.
24 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 25

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Operations
This section describes the primary operations for Add-On Instructions.
Modes
This instruction uses the following standard modes, which are implemented by
using an embedded P_Mode Add-On Instruction.
Table 12 - Modes
Mode Description
Operator The Operator owns control of the device. Operator commands (OCmd_) and Operator settings
(OSet_) from the HMI are accepted.
Program Program logic owns control of the device. Program commands (PCmd_) and Program settings
(PSet_) are accepted.
Override Priority logic owns control of the device and supersedes Operator and Program control. Override
Inputs (Inp_OvrdCmd and other Inp_OvrdXxxx values) are accepted. If so configured,
bypassable interlocks and permissives are bypassed.
Maintenance Maintenance owns control of the device and supersedes Operator, Program, and Override
control. Operator commands and settings from the HMI are accepted. Bypassable interlocks and
permissives are bypassed, and device timeout checks are not processed.
Hand Hardwired logic or other logic outside the instruction owns control of the device. The instruction
tracks the state of the device for bumpless transfer back to one of the other modes.
No Mode The device is disabled and has no owner because the EnableIn input is false. The main
instruction Logic routine is not being scanned. See Execution section for more information on
EnableInFalse processing.
IMPORTANT
Instructions with Cfg_OperKeep and Cfg_ProgKeep keep some aspects of the
device operation with the operator or program regardless of whether the main
mode is Program or Operator mode.
See Rockwell Automation Library of Process Objects: Common Mode Block
(P_Mode) Reference Manual, publication
SYSLIB-RM005, for more
information.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 25
Page 26

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Alarms
This instruction uses the following alarms, which are implemented by using
embedded P_Alarm and P_Gate Add-On Instructions.
Alarm Name P_Alarm Name P_Gate Name Description
Drive Fault DriveFault None Raised when the drive detects a fault and sets its
Faulted status bit. Check the Fault Code and
description to determine the cause. Issuing a Reset of
this object will cause a Clear Fault command to be
sent to the drive in an attempt to clear the fault.
Fail to Start FailToStart None Raised when the drive has and is using run feedback,
an attempt is made to start the drive, and the run
feedback does not indicate that the drive is running
within the configured time. If Fail to Start is
configured as a shed fault, the drive is stopped and a
reset is required in order to start the drive.
Fail to Stop FailToStop None Raised when the drive has and is using run feedback,
an attempt is made to stop the drive, and the run
feedback does not indicate that the drive stopped
within the configured time.
Interlock Trip IntlkTrip None Raised when the drive is running and an interlock ’not
OK’ condition causes the drive to stop.
If interlocks are not bypassed, a bypassable interlock
or a non-bypassable interlock 'not OK' condition
initiates an interlock trip. If interlocks are bypassed,
only a non-bypassable interlock 'not OK' condition
initiates an interlock trip.
I/O Fault IOFault None Raised when the Inp_IOFault input is true. This input
is usually used to indicate to the instruction that a
communication failure has occurred for its I/O. If the
I/O Fault is configured as a shed fault, the drive is
stopped and not permitted to start until reset.
Parameters of the P_Alarm object can be accessed by using the following
convention: [P_Alarm Name].[P_Alarm Parameter].
See Rockwell Automation Library of Process Objects: Common Alarm Block
(P_Alarm) Reference Manual, publication
SYSLIB-RM002, for more
information.
26 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 27

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Simulation
Simulation in the P_PF52x Add-On Instruction disables the normal output and
provides the feedback of a working drive
Set the Inp_Sim parameter in the controller to ‘1’ to enable simulation. The
Simulation icon is displayed at the bottom left of the Operator faceplate,
and indicates that the device is in simulation.
You can also use the following parameters in simulation:
• Cfg_SimScaleEU to scale Speed Reference engineering units to Speed
Feedback engineering units
• Cfg_SimScaleRaw to scale Speed Reference engineering units to raw and
then raw to Speed Feedback engineering units
• Cfg_SimRampT to set the time in seconds to ramp speed feedback
When you have finished in simulation, set the Inp_Sim parameter in the
controller to ‘0’ to return to normal operation.
Execution
The following table explains the handling of instruction execution conditions.
Condition Description
EnableIn False (false rung) Processing for EnableIn False (false rung) is handled the
Powerup (prescan, first scan) Processing of modes and alarms on prescan and Powerup
Postscan (SFC transition) No SFC Postscan logic is provided.
See the Logix5000 Controllers Add-On Instructions Programming Manual,
publication
1756-PM010, for more information.
same as if the drive were Disabled by Command. The drive
outputs are de-energized and the drive is shown as
disabled on the HMI.
is handled by the embedded P_Mode and P_Alarm
Add-On Instructions. See their specifications for details.
On Powerup, the drive is treated as if it had been
Commanded to Stop.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 27
Page 28

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Programming Example
The following example shows the P_PF52x in ladder context. Here, ladder logic
is used to copy the drive input data from the input assembly tag to a buffer tag of
type P_PF52x_Inp.
Next, the P_PF52x Add-On Instruction executes.
Finally, the drive command bits used by the P_PF52x instruction and the drive
speed reference are copied out to the drive. A buffer tag of type P_PF52x_Out is
used.
28 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 29

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Display Elements
The P_PF52x instruction uses the same HMI display elements that are used for
the Variable Speed Drive (P_VSD) instruction.
A display element (global object) is created once and can be referenced multiple
times on multiple displays in an application. When changes are made to the
original (base) object, the instantiated copies (reference objects) are
automatically updated. Use of global objects, with tag structures in the
ControlLogix system, aid consistency and save engineering time.
Table 13 - P_PF52x Drive Display Elements Description
Display Element Name Display Element Description
GO_P_VSD_R These display elements show the different motor
GO_P_VSD_U
GO_P_VSD_D
positions (right, up, and down).
GO_P_VSD_Blower_R These display elements show the different blower
GO_P_VSD_Blower_L
GO_P_VSD_Blower_U
GO_P_VSD_Blower_D
GO_P_VSD_Conveyer_R This display element illustrates a conveyer.
positions (right, left, up, and down).
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 29
Page 30

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 13 - P_PF52x Drive Display Elements Description
Display Element Name Display Element Description
GO_P_VSD_Inline_U These display elements show the different inline motor
GO_P_VSD_Inline_R
GO_P_VSD_Inline_L
GO_P_VSD_Inline_D
positions (up, right, left, and down).
GO_P_VSD_Pump_R These display elements show the different pump
GO_P_VSD_Pump_L
GO_P_VSD_Pump_U
GO_P_VSD_Agitator_D This display element illustrates an agitator in the down
GO_P_VSD_Mixer_U This display element shows a mixer in the up position.
positions (right, left, and up).
position.
30 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 31

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 13 - P_PF52x Drive Display Elements Description
Display Element Name Display Element Description
GO_P_VSD_RPump_U This display element shows a rotary gear pump in the up
GO_P_VSD_Fan_D This display element shows a fan in the down position.
position.
Common attributes of the P_PF52x global objects include the following:
• Graphical representation of the driven equipment
• Speed feedback display with engineering units
• Status/quality indicators
• Mode indicator
• Maintenance Bypass indicator
• State
• Label
• Alarm border that changes color and blinks on unacknowledged alarm
• Alarm indicator that changes color with the severity of an alarm
Alarm Border
Alarm Indicator
Status/Quality Indicator
Speed Feedback Display
State
Engineering Units
Maintenance Bypass
Indicator
Status/Quality Indicator
Mode Indicator
Label
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 31
Page 32

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
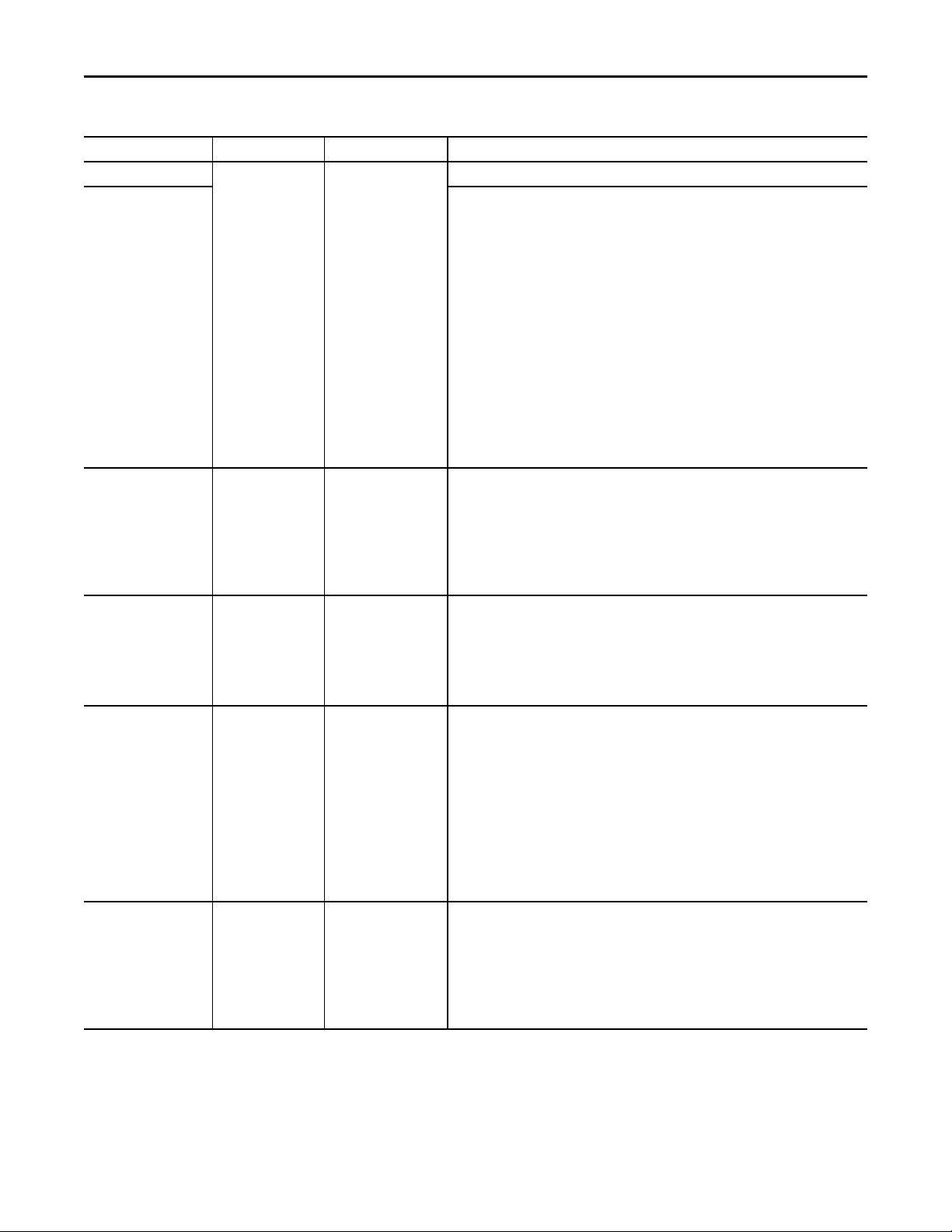
State Indicators
The State Indicator text changes and the display element color changes
depending on the state of the drive.
Color State
Blue Stopping
Dark gray Stopped
Light blue Jogging
Blue Starting
White Running
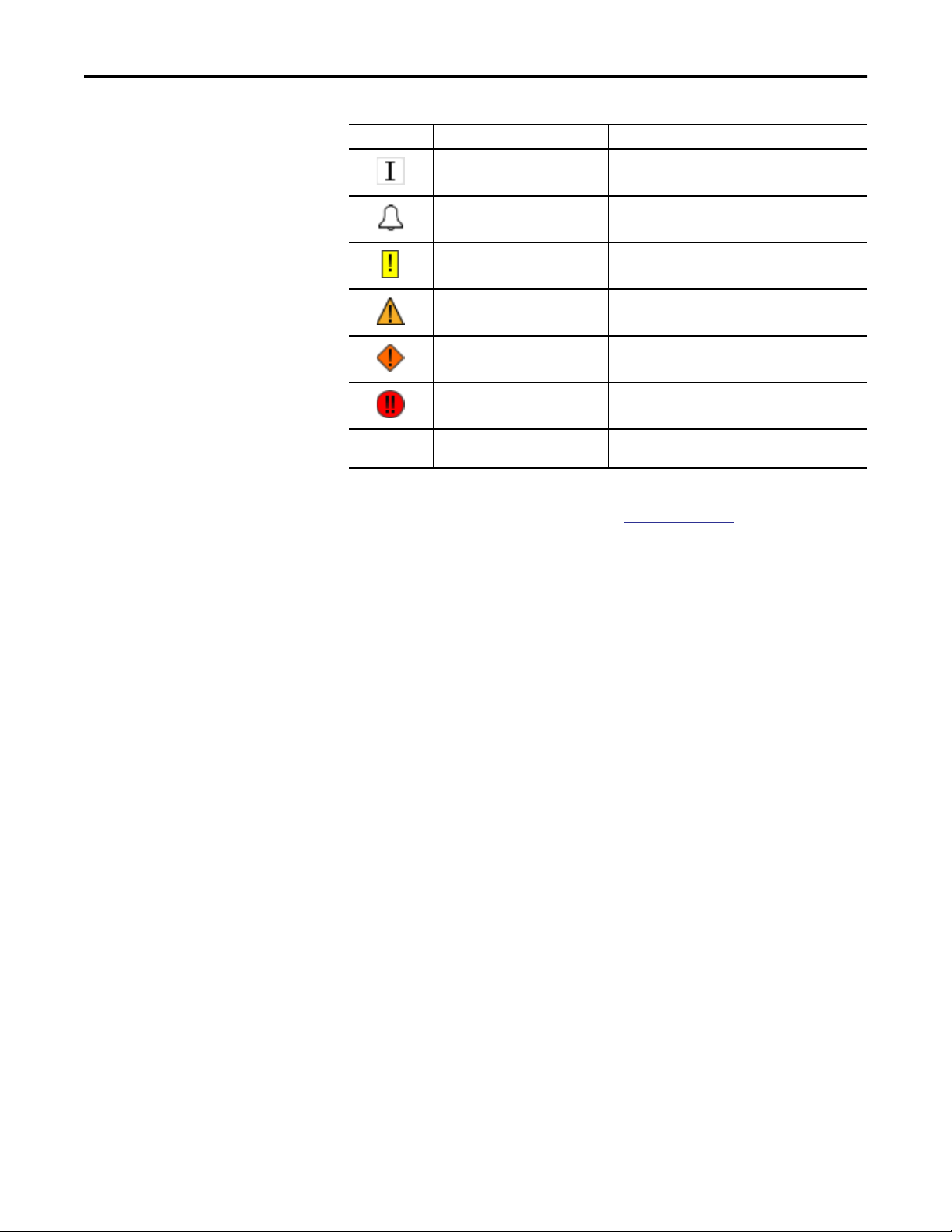
Status/Quality Indicators
One of these symbols appears on the graphic symbol when the described
condition is true.
Graphic Symbol Description
Invalid configuration.
Data quality bad/failure.
Data Quality degraded: uncertain, test, simulation, substitution, or out of specification.
The input or device has been disabled.
Device not ready to operate.
Speed reference limited to minimum/maximum.
Motor is at target speed.
Drive is accelerating.
Drive is decelerating.
32 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 33

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
TIP
When the Invalid Configuration Indicator appears, you can find what
configuration setting is invalid by following the indicators. Click the graphic
symbol to open the faceplate. The Invalid Configuration indicator appears next
to the appropriate tab at the top of the faceplate to help you find the
configuration error. Once you navigate to the tab, the misconfigured item is
flagged with this indicator or appears in a magenta box.
For the PowerFlex 523/525 Variable Frequency Drives Instruction, the Invalid
Configuration indicator appears under the following conditions:
• The Fail to Start check time, Fail to Stop check time, Reset Pulse time, or
Maximum Jog time is set to a value less than zero or greater than 2,147,483
seconds.
• The Speed Feedback Raw Minimum and Raw Maximum scaling
parameters are set to the same value.
• The Speed Feedback Scaled Engineering Units Minimum and Engineering
Units Maximum scaling parameters are set to the same value.
• The Speed Reference Raw Minimum and Raw Maximum scaling
parameters are set to the same value.
• The Speed Reference Scaled Engineering Units Minimum and
Engineering Units Maximum scaling parameters are set to the same value.
• The Maximum Speed Reference clamp value is less than the Minimum
Speed Reference clamp value, or either clamp value is less than zero.
• The Simulated Speed Ramp Time is set to a value less than zero or greater
than 2,147,483 seconds.
• An Alarm Minimum On Time is set to a value less than zero or greater
than 2,147,483 seconds.
• Alarm Severity is set to a value less than 1 or greater than 1000.
TIP
When the Not Ready indicator appears, you can find what condition is
preventing operation by following the indicators. Click the graphic symbol to
open the faceplate. The Not Ready indicator appears next to the appropriate
tab at the top of the faceplate to help you find the condition. When you
navigate to the tab, the condition preventing operation is flagged.
For the PowerFlex 523/525 Variable Frequency Drives Instruction, the Device
Not Ready indicator appears under the following conditions:
• Device has been disabled by Maintenance.
• There is a configuration error.
• An Interlock or Permissive is not OK.
• Operator Stop Priority command requires reset.
• There is a Device Failure or I/O Fault and Shed requires reset.
• The device has been tripped resulting in a Drive Fault.
• Drive not ready.
• Device logic disabled or there is no mode.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 33
Page 34

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Mode Indicators
One of these symbols appears on the right side of the graphic symbol to indicate
the mode of the object instruction.
Graphic Symbol Description
Transparent Operator mode (if the default mode is Operator and the current mode is Operator, the mode
indicator is transparent).
Operator mode (if the default mode is Program).
Operator mode locked.
Transparent Program mode (if the default mode is Program and the current mode is Program, the mode
TIP
indicator is transparent).
Program mode (if the default mode is Operator).
Program mode locked.
Override mode
Maintenance mode.
Hand mode
No mode.
The images provided for the Operator and Program default modes are
transparent; therefore, no mode indicators are visible if the device is in its
default mode. This behavior can be changed by replacing the image files for
these mode indicators with images that are not transparent.
See Rockwell Automation Library of Process Objects: Common Mode Block
(P_Mode) Reference Manual, publication
information.
Alarm Indicators
One of these symbols appears on the left side of the label to indicate the described
alarm condition and the alarm border and label background change color. The
alarm border and label background blink if acknowledgement of an alarm
condition is required. Once the alarm is acknowledged, the alarm border and
label background remain the color that corresponds to the severity of the alarm.
34 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
SYSLIB-RM005, for more
Page 35
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Symbol Border and Label Background Description
No change in color Alarm Inhibit: an alarm is suppressed by the Program,
disabled by Maintenance, or shelved by the Operator.
White Return to normal (no alarm condition), but a previous
Blue Low severity alarm.
Yellow Medium severity alarm.
Red High severity alarm.
Magenta Urgent severity alarm.
No symbol No change in color No alarm or alarm inhibit condition, and all alarms
alarm has not been acknowledged.
are acknowledged.
See Rockwell Automation Library of Process Objects: Common Alarm Block
(P_Alarm) Reference Manual, publication
SYSLIB-RM002, for more
information.
Maintenance Bypass Indicator
This symbol appears to the right of the label to indicate that a maintenance
bypass has been activated.
TIP
When the Maintenance Bypass Indicator appears, you can find what condition
was bypassed by following the indicators. Click the graphic symbol to open the
faceplate. The Maintenance Bypass Indicator appears next to the appropriate
tab at the top of the faceplate to help you find the bypass. Once you navigate to
the tab, the bypassed item is flagged with this indicator.
For the PowerFlex 523/525 Variable Frequency Drives Instruction, the
Maintenance Bypass Indicator appears when interlocks and permissives that can
be bypassed have been bypassed.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 35
Page 36

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Using Display Elements
The global objects for P_PF52x can be found in the global object file
(RA-BAS) P_VSD Graphics Library.ggfx for FactoryTalk View SE. Follow these
steps to use a global object.
1. Copy the global object from the global object file and paste it in the
display file.
2. In the display, right-click the global object and choose Global Object
Parameter Values.
36 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 37

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
The Global Object Parameter Values dialog box appears.
The global object parameters are as follows.
Parameter Required Description
#102 Y Object tag to point to the name of the associated object Add-On Instruction
#103 Y Path that is used for display navigation features to other objects. Include
#120 N Additional parameter to pass to the display command to open the faceplate.
#121 N Additional parameter to pass to the display command to open the faceplate.
#122 Y The options for the global object display are as follows:
in the controller.
program scope if tag is a program scope tag.
Typically used to define position for the faceplate.
When you define the X and Y coordinate, separate parameters so that #120
defines X and #121 defines Y. This definition lets the same parameters be
used in subsequent display commands that originate from the faceplate.
0 = Always show faceplate
1 = Show Quick Display for users without Maintenance access (Code C)
2 = Always show Quick Display
3. Type the tag or value in the Value column as specified in the Description
column.
TIP
You can click the ellipsis (…) to browse and select a tag.
Values for items marked ‘(optional)’ can be left blank.
4. Click OK.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 37
Page 38

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Quick Display
The Quick Display screen provides the means for operators to perform simple
interactions with the P_PF52x instruction instance. From the Quick Display, you
can navigate to the faceplate for full access for operation, maintenance, and
configuration.
Navigate to Full
Faceplate Button
Faceplate
The P_PF52x faceplate consists of six tabs and each tab consists of one or more
pages.
The title bar of the faceplate contains the value of local configuration tags
Cfg_Tag and Cfg_Desc.
The Operator tab is displayed when the faceplate is initially opened. Click the
appropriate icon at the top of the faceplate to access a specific tab.
Operator
Maintenance
Engineering
Diagnostics
Trends
Alarms
Exit
Help
The faceplate provides the means for operators, maintenance workers, engineers,
and others to interact with the P_PF52x instruction instance. You can also view
its status and values and manipulate it through its commands and settings. When
a given input is restricted via FactoryTalk View security, the required user
security-code letter is shown in the tables that follow.
38 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 39

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Operator Tab
The Faceplate initially opens to the Operator (‘Home’) tab. From here, an
operator can monitor the device status and manually operate the device when it is
in Operator mode.
The Operator tab shows the following information:
• Current mode (Operator, Program, Override, Maintenance, or Hand)
• Requested mode indicator (appears only if the Operator or Program mode
has been superseded by another mode)
• Drive State (Stopping, Stopped, Starting, Running, Disable, or I/O Fault)
• Drive Motion State (Accelerating, Decelerating, or At Speed)
• Drive Ready indicator (Drive Ready, Drive Not Ready, or Drive Faulted)
• Actual speed and requested speed
• Actual direction and requested direction (appears only if the drive is
configured to allow running in reverse)
• Input Source and Quality indicator (See 'SrcQ' in the Output parameters
table on
page 20 for details)
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 39
Page 40

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Operator Mode Request/Lock
and Release/Unlock Buttons
Reset and Acknowledge
All Alarms Button
Mode Indicator
Drive State
Runtime Navigation
Button
Restart Inhibit
Navigation Button
Reverse Permissive
Navigation Button
Drive Ready
Indicator
Input Source and
Quality Indicator
Input Source and
Quality Icon
Drive Start Command Button
Drive Stop Command Button
Drive Jog Command
Button
Interlock Navigation
Button
Forward Permissive
Navigation Button
Speed Reference
Forward Direction
Command Button
Reverse Direction
Command Button
The following table shows the functions included on the Operator tab.
Table 14 - Operator Tab Description
Function Action Security
Click to release Operator mode lock. Manual Device
Click to lock in Operator mode.
Click to request Program mode.
Click to request Operator mode.
40 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Operation
(Code B)
Page 41

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 14 - Operator Tab Description
Function Action Security
Click to reset and acknowledge all alarms. Acknowledge Alarms
(Code F)
Click to Start drive. Normal Operation of
Click to Stop drive.
Click to Jog drive.
Click to select forward direction.
Click to select reverse direction.
Click to open Reverse Permissive faceplate. None
Click to open Forward Permissive faceplate.
Devices (Code A)
Click to open Interlock faceplate.
Click to open runtime faceplate.
Click to open Restart Inhibit faceplate.
Reference (Hz) Type the desired speed in engineering units.
If the object is configured to have permissive and interlock objects (for example,
Cfg_HasIntlkObj is true), the permissive and interlock indicators become
buttons. These buttons open the faceplates of the source objects that are used as a
permissive or interlock (often this is a P_Intlk or P_Perm object). If the object is
not configured in this way, the permissive or interlock are indicators only.
The Operator tab also has a button to open the Restart Inhibit faceplate if the
drive is configured to use the P_ResInh object (Cfg_HasResInh = 1). When the
object is not configured to have an P_ResInh instruction, the Restart Inhibit
button is not displayed.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 41
Page 42

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
The Operator tab also has a button to open the runtime faceplate if the drive is
configured to use the P_RunTime object (Cfg_HasRunTime = 1). When the
object is not configured to have an P_RunTime instruction, the runtime button
is not displayed.
See these publications for more information:
• Rockwell Automation Library of Process Objects: Interlock with First Out
and Bypass (P_Intlk) Reference Manual, publication
SYSLIB-RM004
• Rockwell Automation Library of Process Objects: Permissives with Bypass
(P_Perm) Reference Manual, publication
SYSLIB-RM007
• Rockwell Automation Library of Process Objects: Restart Inhibit for
Large Motor (P_ResInh) Reference Manual, publication
SYSLIB-RM009
• Rockwell Automation Library of Process Objects: Runtime and Starts
(P_RunTime) Reference Manual, publication
SYSLIB-RM010
One of these symbols appears to indicate the described Interlock or Permissive
condition.
Permissive Symbol Interlock Symbol Description
One or more conditions not OK
Non-bypassed conditions OK
All conditions OK, bypass active
All conditions OK
42 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 43

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Alarm indicators appear on the Operator tab when the corresponding alarm
occurs.
Fail to Start
Alarm
Drive Fault
Alarm
The following table shows the alarm status on the Operator tab.
Table 15 - Operator Tab Alarm Status
Graphic Symbol Alarm Status
In Alarm (Active Alarm)
Fail to Stop
Alarm
Interlock Trip
Alarm
I/O Fault Alarm
In Alarm and Acknowledged
Out of Alarm but not Acknowledged
Alarm Suppressed (by Program) (Alarm is logged but not
displayed)
Alarm Disabled (by Maintenance)
Alarm Shelved (by Operator)
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 43
Page 44

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Maintenance Tab
Maintenance personnel use the information and controls on the Maintenance tab
to adjust device parameters. They also troubleshoot and temporarily work
around device problems, and disable the device for routine maintenance.
The Maintenance tab is divided into two pages.
Maintenance Tab Page 1
Page 1 of the Maintenance tab shows the following information:
• Current mode (Operator, Program, Override, Maintenance, or Hand).
• Requested modes Indicator - This display highlights all modes that have
been requested. The leftmost highlighted mode is the active mode.
• Whether the motor is enabled or disabled.
• Interlock and Permissive Bypassed/Enabled indicator.
Mode Indicator
Requested Modes
Indicator
Drive Enabled/Disabled
Indicator
Interlocks and Permissives
Bypassed Indicator
Maintenance Mode Enable
and Release Buttons
Maintenance Mode Enable
and Disable Drive Buttons
Enable/Disable Bypass
Bypassable Interlock and
Permissives Buttons
44 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 45

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
The following table shows the functions on page 1 of the Maintenance tab.
Table 16 - Maintenance Tab Page 1 Description
Function Action Security Configuration Parameters
Click for Maintenance mode. Equipment
Maintenance
(Code C)
Click to release Maintenance mode.
Click to enable drive.
Click to disable drive.
None
In Override mode,
bypass Interlocks
and Permissives
that can be
bypassed
Click to enable checking of all
interlocks and permissives.
Click to bypass checking of interlocks
and permissives that can be
bypassed.
Check to have the interlocks and
permissives that can be bypassed,
bypassed in Override mode.
Disable
Alarms
Bypass
Permissives
and Interlocks
(Code H)
None
Cfg_OvrdPermIntlk
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 45
Page 46

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Maintenance Tab Page 2
The following table shows the functions on page 2 of the Maintenance tab.
Table 17 - Maintenance Tab Page 2 Description
Function Action Security Configuration Parameters
Bumpless Program/
Operator Transition
Bumpless
Transition from
Override/Hand to
Program/Operator
Time to pulse
Out_Reset to clear
drive fault
(seconds)
Time after 'Start' for
Feedback before
Fault (seconds)
Check to have program settings, such
as Speed Reference, track operator
settings in Operator mode, and have
operator settings track Program
Settings in Program mode.
Check to have the Program and
Operator Speed Reference track the
Override Speed Reference in Override
mode or the actual speed in Hand
mode.
Type the amount of time to hold
Out_Reset true to reset a drive fault
when a reset command is received.
Type the amount of time for the
drive’s run feedback to confirm that
the drive has started before raising a
Fail to Start alarm.
Equipment
Maintenance
(Code C)
Configuration
and Tuning
Maintenance
(Code D)
Cfg_SetTrack
Cfg_SetTrackOvrdHand
Cfg_ResetPulseT
Cfg_FailToStartT
46 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 47

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 17 - Maintenance Tab Page 2 Description
Function Action Security Configuration Parameters
Time after 'Stop' for
Feedback before
Fault (seconds)
Maximum jog time
(seconds) 0 =
unlimited
Speed Reference
Limits (Minimum
and Maximum)
Type the amount of time for the
drive’s run feedback to confirm that
the drive has stopped before raising a
Fail to Stop alarm.
Type the maximum time (in seconds)
that the drive can be jogged by using
OCmd_Jog.
IMPORTANT: This value stops drive
jogging if HMI communication is lost
during a jog.
Type the clamping limits for the
speed reference. If a speed reference
outside this range is entered, the
speed is clamped at these limits and
Sts_SpeedLimited is asserted.
Configuration
and Tuning
Maintenance
(Code D)
Cfg_FailToStopT
Cfg_MaxJogT
• Cfg_MaxSpdRef
• Cfg_MinSpdRef
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 47
Page 48

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Engineering Tab
The Engineering tab provides access to device configuration parameters and
ranges, options for device and I/O setup, displayed text, and
faceplate-to-faceplate navigation settings, and for initial system commissioning or
later system changes.
The Engineering tab is divided into five pages.
Engineering Tab Page 1
Page one of the Engineering tab is used to set the Speed Reference (output)
scaling, from user Engineering Units used on the faceplate (typically Hz, RPM,
or percent) to Raw Units (counts) sent to the drive. Page 1 is also used to set the
Speed Feedback (input) scaling, from Raw Units as received from the drive
(counts) to Engineering Units for display (typically Hz, RPM, or Percent).
Check the manual for your drive to determine what count sent to the drive
corresponds to your maximum speed reference. Also check what count received
from the drive corresponds to your maximum speed feedback.
Speed Feedback
Raw Maximum
and Minimum
Speed Reference
EU Maximum and
Minimum
48 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Speed Feedback
EU Maximum and
Minimum
Speed Feedback
Engineering Units
Speed Reference
Engineering Units
Simulated Speed
Feedback Methods
Speed Reference
Raw Maximum
and Minimum
Page 49

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
The following table lists the functions on page 1 of the Engineering tab.
Table 18 - Engineering Tab Page 1 Descriptions
Function Action Security Configuration
Speed Feedback
Raw Maximum/
Minimum
Speed Feedback
EU Maximum/
Minimum
Speed Feedback
Engineering Units
Speed Reference
Engineering Units
Speed Reference
EU Maximum/
Minimum
Speed Reference
Raw Maximum/
Minimum
Simulated Speed
Feedback Method
Selection
Type the raw input count that corresponds to
the maximum and minimum (This value is
usually zero.) speed feedback from the drive
Type the engineering unit value for the
maximum and minimum (usually zero) speed
feedback from the drive.
Do not enter a negative value for reversing
drives. Reversing is handled separately.
Type the text of the units of measure of the
scaled speed feedback. (Often Hz, RPM, or
Percent.)
Type the text of the units of measure of the
scaled speed reference. (Often Hz, RPM, or
Percent.)
Type the engineering unit value for the
maximum and minimum (usually zero) speed
reference sent to the drive.
Do not enter a negative value for reversing
drives. Reversing is handled separately.
Type the raw output count that corresponds to
the maximum and minimum (This value is
usually zero.) speed reference sent to
the drive.
Click the Simulation option (left, middle, or
right) that corresponds to how the speed
feedback for the drive is to be determined from
the speed reference when the drive is being
simulated (Inp_Sim = 1).
Click the left option to copy the speed reference
in engineering units to the speed feedback.
(The simulated feedback is ramped to act like a
drive that is accelerating or decelerating.) Use
this option if the speed reference and speed
feedback use the same scaling parameters
Click the middle option to scale the simulated
feedback from the speed reference engineering
unit range to the speed feedback engineering
unit range. Use this setting if the speed
reference and speed feedback have different
engineering ranges. For example, percent for
reference and Hz for feedback), but the
maximum reference (for example, 100%)
corresponds to the maximum feedback (for
example, 3600 RPM.
Click the right option to scale the speed
reference to raw units, copy the speed
reference in raw units to speed feedback raw
units, and scale to speed feedback engineering
units. Use this setting if the reference and
feedback ranges do not correspond.
Engineering
Configuration
(Code E)
Parameters
• Cfg_SpeedFdbkRawMax
• Cfg_SpeedFdbkRawMin
• Cfg_SpeedFdbkEUMax
• Cfg_SpeedFdbkEUMin
Cfg_SpeedFdbkEU
Cfg_SpeedRefEU
• Cfg_SpeedRefEUMax
• Cfg_SpeedRefEUMin
• Cfg_SpeedRefRawMax
• Cfg_SpeedRefRawMin
• Cfg_SimScaleEU
• Cfg_SimScaleRaw
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 49
Page 50

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Engineering Tab Page 2
Mode Configuration
Display Button
Configure Device
Description, Label,
and Tag Text
Configure Device
Forward and Reverse
Direction Text
The following table shows the functions on page 2 of the Engineering tab.
Table 19 - Engineering Tab Page 2 Description
Function Action Security Configuration Parameters
Click to navigate to the Mode
Configuration display.
Drive Description Type a Description of the drive that
Label Type a Label for the drive that
Tag Type a Tag for the drive. The tag
Forward text Type a name for forward direction. Cfg_FwdText
Reverse Text Type a name for reverse direction. Cfg_RevText
Digital Input 1
through Digital
Input 4
50 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
appears in the title bar of the
faceplate.
appears on the graphic symbol.
appears in the faceplate title bar and
in the Tooltip.
Type names for the digital inputs. Cfg_Digin1Txt through
None See Mode Configuration display on
Engineering
Configuration
(Code E)
page 51.
Cfg_Desc
Cfg_Label
Cfg_Tag
Cfg_Digin4Txt
Page 51

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 19 - Engineering Tab Page 2 Description
Function Action Security Configuration Parameters
Clear Program
Commands on
Receipt
Operator command
resets fault
Drive can be jogged Check to make the Jog command
Check to have the P_PF52x
instruction clear Program commands
(PCmd) as soon as they are received
(default).
Check to have a new operator drive
command reset faults.
Clear this checkbox if a reset is
required to clear faults.
button visible on the Operator tab
and enable the drive to be jogged
from the faceplate.
Engineering
Configuration
(Code E)
Cfg_PCmdClear
Cfg_OCmdResets
Cfg_HasJog
Mode Configuration Display
This display lets you select the default mode for the object by selecting the
appropriate mode.
IMPORTANT
If no mode is being requested, changing the default mode changes the mode
of the instruction.
You must have FactoryTalk View security code E to select the default mode on
this display.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 51
Page 52

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Engineering Tab Page 3
The following table shows the functions on page 3 of the Engineering tab.
Table 20 - Engineering Tab Page 3 Description
Function Action Security Configuration Parameters
Drive can run reverse Check to make the forward and
Enable navigation to
run forward
permissive object
52 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
reverse direction command buttons
visible on the Operator tab and
enable the drive to run forward or
reverse.
Check if a permissive object is
connected to Inp_FwdPermOK. The
Permissive indicator becomes a
button that opens the permissive
faceplate.
IMPORTANT: The name of the
Forward Permissive object in the
controller must be this object's
name with the suffix ‘_FwdPerm’.
For example, if your P_PF52x object
has the name ’Drive123’, then its
Forward Permissive object must be
named ‘Drive123_FwdPerm’.
Engineering
Configuration
(Code E)
Cfg_HasReverse
Cfg_HasFwdPermObj
Page 53

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 20 - Engineering Tab Page 3 Description
Function Action Security Configuration Parameters
Enable navigation to
run reverse
permissive object
Enable navigation to
interlock object
Enable navigation to
restart inhibit object
Enable navigation to
runtime object
Check if a permissive object is
connected to Inp_RevPermOK. The
Permissive indicator becomes a
button that opens the permissive
faceplate.
IMPORTANT: The name of the
Reverse Permissive object in the
controller must be this object's
name with the suffix ‘_RevPerm’. For
example, if your P_PF52x object has
the name ’Drive123’, then its Reverse
Permissive object must be named
‘Drive123_RevPerm’.
Check if an interlock object is
connected to Inp_IntlkOK. The
Interlock indicator becomes a button
that opens the interlock faceplate.
IMPORTANT: The name of the
Interlock object in the controller
must be this object's name with the
suffix ‘_Intlk’. For example, if your
P_PF52x object has the name
’Drive123’, then its Interlock object
must be named ‘Drive123_Intlk’.
Check if a restart inhibit object is
connected. The button that opens
the Restart Inhibit faceplate
appears.
IMPORTANT: The name of the
Restart Inhibit object in the
controller must be this object's
name with the suffix ‘_ResInh’. For
example, if your P_PF52x object has
the name ’Drive123’, then its Restar t
Inhibit object must be named
‘Drive123_ResInh’.
Check if a runtime object is
connected. The button that opens
the runtime faceplate appears.
IMPORTANT: The name of the
runtime object in the controller
must be this object's name with the
suffix ‘_RunTime’. For example, if
your P_PF52x object has the name
‘Drive123’, then its runtime object
must be named
‘Drive123_RunTime’.
Engineering
Configuration
(Code E)
Cfg_HasRevPermObj
Cfg_HasIntlkObj
Cfg_HasResInhObj
Cfg_HasRunTimeObj
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 53
Page 54

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Engineering Tab Page 4
The following table shows the functions on page 4 of the Engineering tab.
Table 21 - Engineering Tab Page 4 Description
Function Action Security Configuration Parameters
Stop Drive on
I/O Fault
Stop Drive on Fail
to Start
Stop Drive on
Interlock Trip
54 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Check to stop the drive if an I/O Fault
is detected. After the I/O Fault clears,
a reset is required before the drive
can be started.
Clear this checkbox to show only the
I/O Fault Status/Alarm and not stop
the drive if an I/O Fault is detected.
Check to stop the drive on a failure to
start. A reset is required before
another start can be attempted.
Clear this checkbox to show only the
Fail to Start status and alarm on a
failure to start. The outputs are not
changed, so the instruction
continues to attempt to start the
motor.
The drive always stops on an
Interlock trip. This item cannot be
cleared. It is displayed as a reminder
that the Interlock Trip function
always stops the drive.
Engineering
Configuration
(Code E)
Cfg_ShedOnIOFault
Cfg_ShedOnFailToStart
None
Page 55

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 21 - Engineering Tab Page 4 Description
Function Action Security Configuration Parameters
Speed Reference Operator keeps
control in Program
mode
Speed Reference Program keeps
control in Operator
mode
Start & Stop
Commands Operator keeps
Control in Program
mode
Start & Stop
Commands Program keeps
Control in Operator
mode
Forward & Reverse
Commands Operator keeps
Control in Program
mode
Forward & Reverse
Commands Program keeps
Control in Operator
mode
Output Datalink
Commands Program keeps
Control in Operator
mode
Output Datalink
Commands Program keeps
Control in Operator
mode
Check to keep control of the drive
Speed Reference with the Operator,
even if the instruction is in Program
mode.
Clear this checkbox to have control
of the drive Speed Reference follow
the Instruction mode.
Check to keep control of the drive
Speed Reference with the Program,
even if the instruction is in Operator
mode.
Clear this checkbox to have control
of the drive Speed Reference follow
the Instruction mode.
Check to keep the drive Start, Stop,
and Jog (if used) commands with
the Operator, even if the instruction
is in Program mode.
Clear this checkbox to have control
of the drive Start, Stop, and Jog
follow Instruction mode.
Check to keep control of the drive
Start and Stop commands with the
Program, even if the instruction is in
Operator mode.
IMPORTANT: The Program cannot
Jog the drive, even if Jogging is
enabled.
Clear this checkbox to have control
of the drive Start, Stop, and Jog
follow Instruction mode.
Check to keep control of the drive
Forward and Reverse commands, if
used, with the Operator, even if the
instruction is in Program mode.
Clear this checkbox to have control
of the drive Forward and Reverse
commands follow the Instruction
mode.
Check to keep control of the drive
Forward and Reverse commands (if
used) with the Program, even if the
instruction is in Operator mode.
Clear this checkbox to have control
of the drive Forward and Reverse
commands follow the Instruction
mode.
Check to keep control of the Datalink
commands with the Operator even if
the instruction is in Program mode.
Clear this checkbox to have control
of the Datalink commands follow
the Instruction mode.
Check to keep control of the Datalink
commands with the Program even if
the instruction is in Operator mode.
Clear this checkbox to have control
of the Datalink commands follow
the Instruction mode.
Engineering
Configuration
(Code E)
Cfg_OperKeep.0
Cfg_ProgKeep.0
Cfg_OperKeep.1
Cfg_ProgKeep.1
Cfg_OperKeep.2
Cfg_ProgKeep.2
Cfg_OperKeep.3
Cfg_ProgKeep.3
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 55
Page 56

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Engineering Tab Page 5
The following table shows the functions on page 5 of the Engineering tab.
Table 22 - Engineering Tab Page 5 Description
Function Action Security Configuration Parameters
Operator ‘Stop’
command available
in any mode
Allow local ‘Start’ or
‘Stop’ without
triggering alarm
Time to ramp speed
feedback in
Loopback Test
(seconds)
56 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Check (= 1) so that the OCmd_Stop
has priority and is accepted at any
time regardless of instruction mode.
Clear this checkbox (= 0) so that the
OCmd_Stop works only in Operator
or Maintenance mode.
IMPORTANT: If OCmd_Stop is used
to stop the drive in a mode other
than Operator or Maintenance, a
reset is required before the drive can
be started.
Check (= 1) to let local circuits start/
stop the drive without an alarm.
Clear this checkbox (= 0) to
start/stop the drive from the HMI or
program only.
Type the time, in seconds, to ramp
speed feedback when in Simulation.
Cfg_OperStopPrio
Cfg_AllowLocal
Cfg_SimRampT
Page 57

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Diagnostics Tab
The Diagnostic tab provides indications that are helpful in diagnosing or
preventing device problems. These diagnostic indications can include specific
reasons a device is 'Not Ready', device warnings and faults, warning and fault
history, and predictive/preventive maintenance data.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 57
Page 58

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Trends Tab
The Trends tab shows trend charts of key device data over time. These faceplate
trends provide a quick view of current device performance to supplement, but not
replace, dedicated historical or live trend displays.
(Blue) Speed Reference
(Green) Speed Feedback
58 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 59

Alarm Names
PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Alarms Tab
The Alarms Tab shows all available alarms for the device and their current status.
From here, alarms can be acknowledged and reset. Click an alarm name to open
the alarm detail faceplate for that alarm, where the alarm can be shelved by the
operator, disabled by maintenance personnel, or configured by engineering.
Alarm Acknowledge
Command Button
Alarm Severity Indicator
Reset and Acknowledge All
Alarms Command Button
Click an alarm name to open the P_Alarm faceplate for that alarm. From the
P_Alarm faceplate, you can configure and perform additional operations on
the alarm.
If an alarm is active, the panel behind the alarm changes color to match the
severity of the alarm. The color of the bell icon at the top of the faceplate shows
the severity of the highest active alarm, and the icon blinks if any alarm is
unacknowledged or requires reset.
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 59
Page 60

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Table 23 - Alarm Severity Colors
Color Definition
Magenta Urgent
Red High
Yellow Medium
Blue Low
White (bell icon) Alarm has cleared but is unacknowledged
Background (Light Gray) No alarm
The following table shows the functions on the Alarms tab.
Table 24 - Alarms Tab Description
Function Action Security
Alarm Name Click an alarm name to open the associated
P_Alarm faceplate.
Click to acknowledge the alarm. Acknowledge Alarms
None
(Code F)
Click to reset and acknowledge all alarms.
When the Reset and Acknowledge All Alarms button is enabled, the panel
behind the alarm blinks, indicating the alarm requires acknowledgement or reset.
The Alarm Acknowledge button is enabled if the alarm requires
acknowledgment. Click the button with the check mark to acknowledge the
alarm.
See Rockwell Automation Library of Process Objects: Common Alarm Block
(P_Alarm) Reference Manual, publication
SYSLIB-RM002, for
more information.
60 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 61

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
PowerFlex 523/525 Variable Frequency Drives Faceplate Help
The Faceplate Help is divided into two pages.
Faceplate Help Page 1
Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017 61
Page 62

PowerFlex 523/525 Variable Frequency Drives (P_PF52x)
Faceplate Help Page 2
62 Rockwell Automation Publication SYSLIB-RM048D-EN-P - February 2017
Page 63

Page 64

Rockwell Automation Support
Rockwell Automation provides technical information on the Web to assist you in using its products.
http://www.rockwellautomation.com/support you can find technical and application notes, sample code, and links to
At
software service packs. You can also visit our Support Center at
updates, support chats and forums, technical information, FAQs, and to sign up for product notification updates.
In addition, we offer multiple support programs for installation, configuration, and troubleshooting. For more
information, contact your local distributor or Rockwell Automation representative, or visit
http://www.rockwellautomation.com/services/online-phone.
Installation Assistance
If you experience a problem within the first 24 hours of installation, review the information that is contained in this
manual. You can contact Customer Support for initial help in getting your product up and running.
United States or Canada 1.440.646.3434
Outside United States or Canada Use the
Worldwide Locator at http://www.rockwellautomation.com/rockwellautomation/support/overview.page, or contact your local
Rockwell Automation representative.
New Product Satisfaction Return
https://rockwellautomation.custhelp.com/ for software
Rockwell Automation tests all of its products to help ensure that they are fully operational when shipped from the
manufacturing facility. However, if your product is not functioning and needs to be returned, follow these procedures.
United States Contact your distributor. You must provide a Customer Support case number (call the phone number above to obtain one) to your
Outside United States Please contact your local Rockwell Automation representative for the return procedure.
distributor to complete the return process.
Documentation Feedback
Your comments will help us serve your documentation needs better. If you have any suggestions on how to improve this
document, complete this form, publication
Rockwell Automation maintains current product environmental information on its website at
http://www.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page.
Rockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, Tel: +90 (216) 5698400
RA-DU002, available at http://www.rockwellautomation.com/literature/.
Publication SYSLIB-RM048D-EN-P - February 2017
Supersedes Publication SYSLIB-RM048C-EN-P - January 2016 Copyright © 2017 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.
 Loading...
Loading...