

Page 1
Technical Data
Original Instructions
1443 Series Accelerometers Specifications
Catalog Numbers 1443-ACC-GP series, 1443-ACC-VO series, 1443-ACC-IS series, 1443-ACC-AT s e r i e s , 1 4 4 3 - A C C - L F - T ,
1443-ACC-HF-T
Top ic Pag e
Sensor Selection Process 4
Shield Wire Isolation Sensor and Cable Selection 8
Sensor Quick Reference 11
Metric and Imperial Mounting 13
Sensors 14
Sensor Certifications and Approvals 42
Accessories 44
Sensor Cross-reference - 1443 Series (New) to 9000 Series (Old) 56
Additional Resources 59
Summary of Changes
Top ic Pa ge
Added new topic ‘API-670 compliance’ 10
Added Important for sensors manufactured earlier than October 2017 10
Added Hall-effect Speed Sensor information to quick reference section 13, 42
Sensitivity changed from (±10%) to (±5%) global change 14
Updated footnote for sensitivity tolerance 14
Updated all Sensor tables frequency ranges with new ranges 14
Exception for sensor compliance for six Accelerometers 16
Page 2

1443 Series Accelerometers Specifications
Permanently Installed
Accelerometers
Sensor Cables to Dynamix™ 1444
Permanently Installed
Accelerometers
Sensor Cables
Switch Box
Sensor to Data Collector Cable
Dynamix™ 2500
Rockwell Automation® 1443 Series Accelerometers are general-purpose sensors that are used to measure vibration on
industrial machinery. The 1443 Series family also includes sensors with these varied capabilities:
• Low frequency, as low as 0.1 Hz or 6 cpm
• High frequency, up to 20 kHz or 1200 kcpm
• Velocity output, internal integrator
• Hazardous area approved
• Dual accelerometer and temperature output
Typical Vibration Measurement Systems
Accelerometers are either permanently mounted or carried from point-to-point in a route-based measurement or analysis
scheme. The entire measurement system, however, can take on various forms, depending on sensor type and the goal of
the monitoring program. The following examples illustrate vibration measurement and monitor systems.
Figure 1 - Dynamix™ System and Permanently Installed Accelerometers
Figure 2 - Portable Data Collector and Permanently Installed Accelerometers
2 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 3
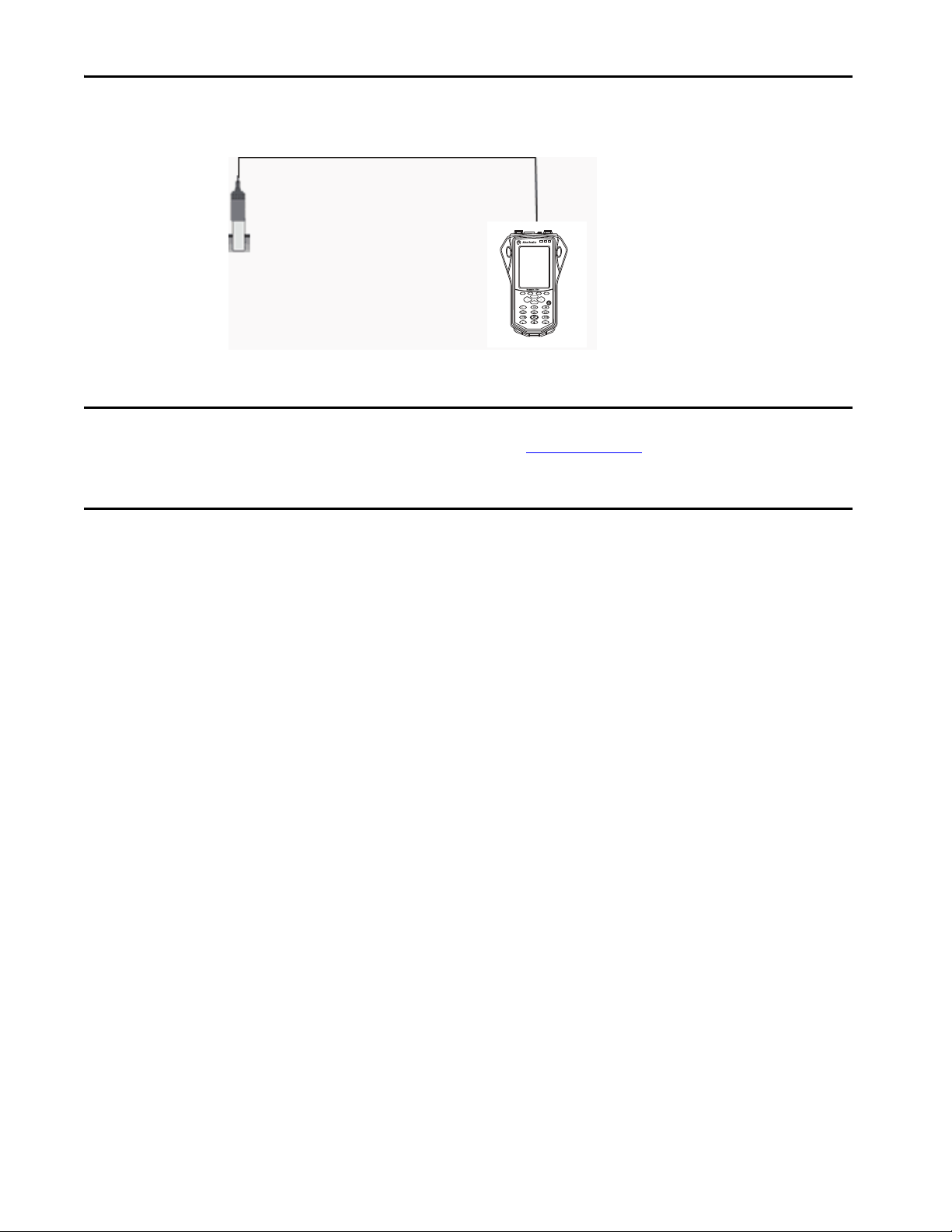
Figure 3 - Portable Data Collector and Accelerometer
Sensor to Dynamix™ 2500
Precision Industrial
Accelerometer with
Magnetic Mounting
Dynamix™ 2500
IMPORTANT All specifications are at room temperature unless otherwise specified.
For certification information, see Declaration of Conformance at rok.auto/certifications
Optional versions have identical specifications and accessories as listed for standard model except where noted. Multiple
options can be used.
1443 Series Accelerometers Specifications
.
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 3
Page 4
1443 Series Accelerometers Specifications
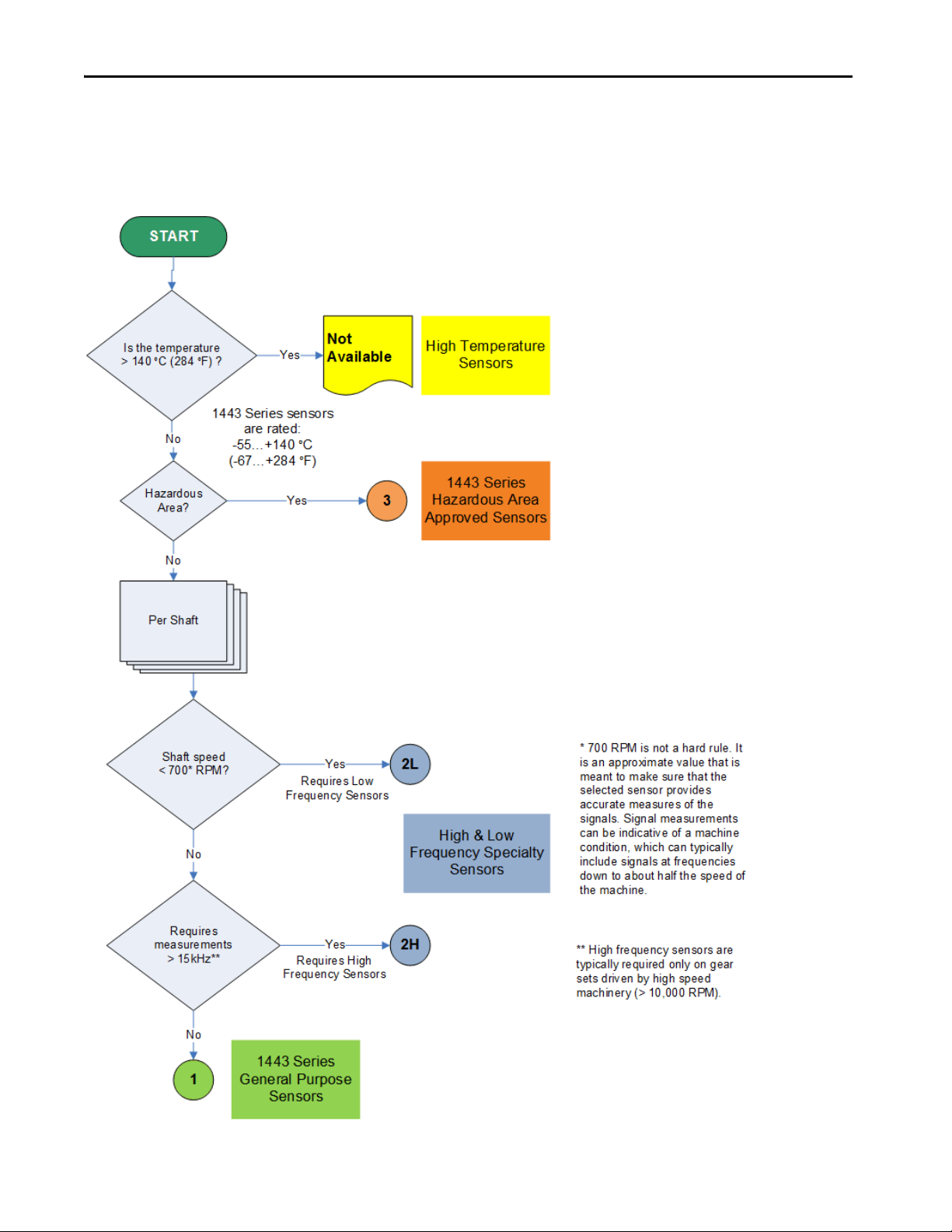
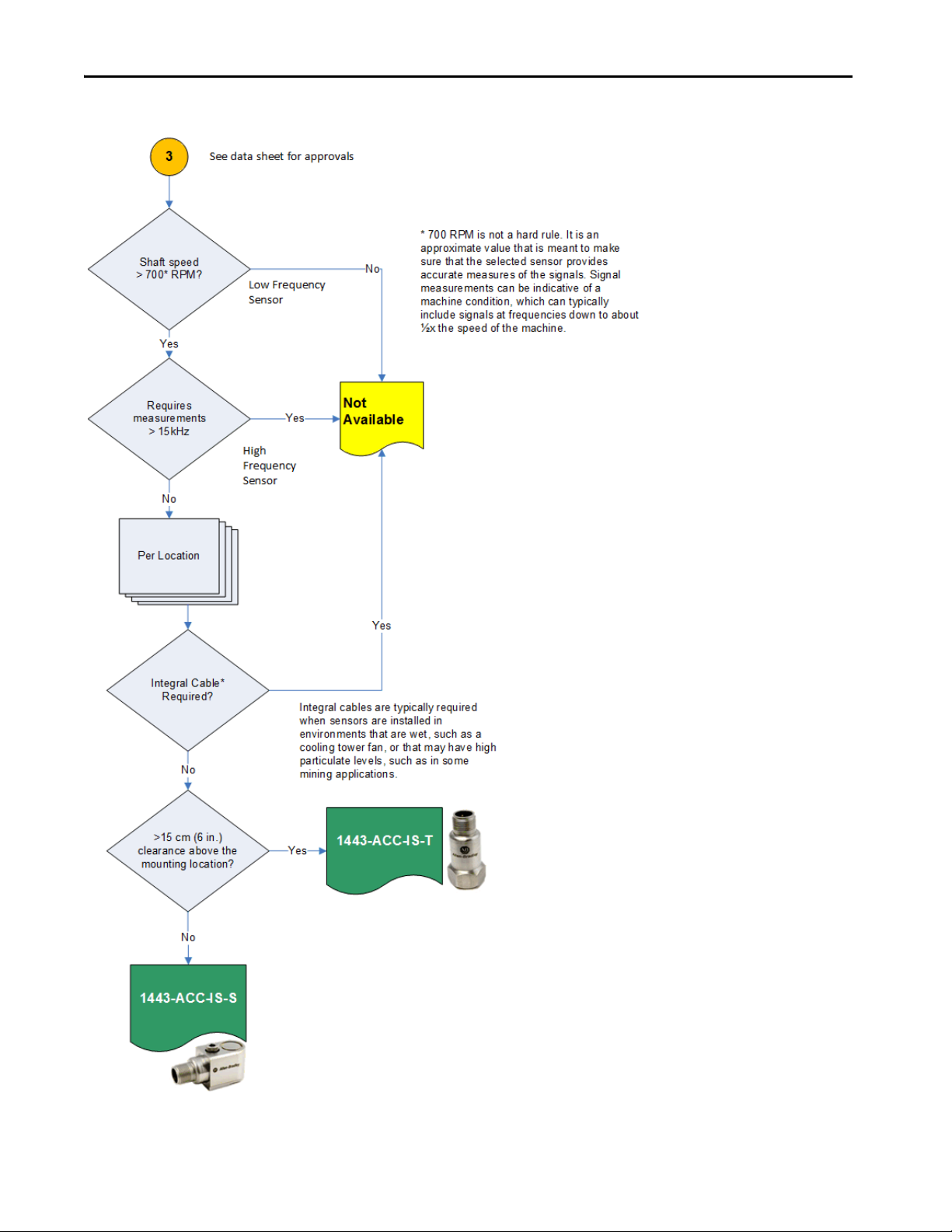
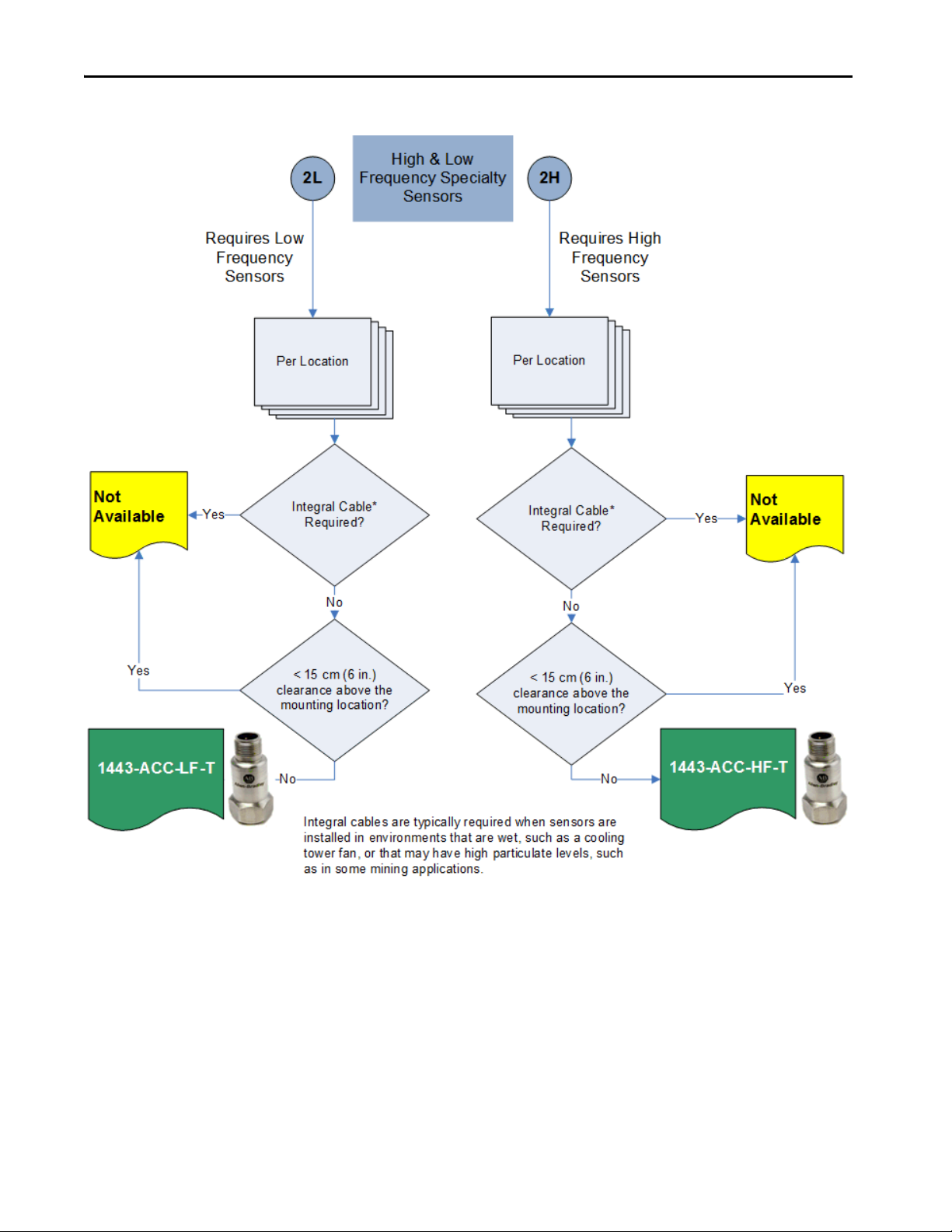
Sensor Selection Process
This flowchart illustrates the process that you can follow to select the appropriate sensor for your application.
Figure 4 - Sensor Selection Flowchart
4 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 5

1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 5
Page 6
1443 Series Accelerometers Specifications
6 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 7
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 7
Page 8

1443 Series Accelerometers Specifications
Shield Wire Isolation Sensor and Cable Selection
The 1443 Series include sensor and cable solutions that isolate the shield wire from the sensor or ground the shield wire
to the sensor. For standard sensors, select either shield isolated or shield grounded cables. When a sensor with an integral
cable is required, select a sensor with the shield wire isolated from the sensor or that has its shield wire grounded to the
sensor.
When a shield to sensor isolated solution is required, which is the normal recommended method:
• If a sensor without an integral cable is required, use an accessory cable that has its shield wire isolated from the
sensor connector. Select a cable with ‘IBC’ in its catalog number, for example, 1443-CBL-MS2IBC-32S.
• If a sensor with an integral cable is required, use a sensor with its shield wire isolated from the sensor. Select a
sensor with ‘SI’ in its catalog number, for example, 1443-ACC-GP-T16-SI.
When a shield grounded sensor is required:
• If a sensor without an integral cable is required, use an accessory cable that has its shield wire that is grounded to
the sensor connector. Select a cable with ‘GBC’ in its catalog number, for example, 1443-CBL-MS2GBC-16S.
• If a sensor with an integral cable is required, use a sensor with its shield wire that is grounded to sensor case. Select
a sensor with ‘SC’ in its catalog number, for example, 1443-ACC-GP-T16-SC.
The recommended solution is to connect the shield at the measurement system and leave it isolated at the sensor end. Use
IBC version cables or ‘SI’ version sensors when an integral cable sensor is required. However, when EMI problems are
present or expected, then a shield case grounded solution can prove to be a better design.
When signal noise or interference is a problem or concern, you must understand the source of the problem to resolve it.
Noise can be introduced into signals from accelerometers through these common phenomena:
• Electromagnetic Interference (EMI)
EMI is the introduction of unwanted signals into an electronic device from electromagnetic fields that another
electronic device generated. Televisions, radars, vehicles, variable-frequency drives (VFDs), and other electronic
devices can produce high powered electromagnetic fields. EMI can be introduced into the measurement system via
the signal wiring when that wiring acts as an antenna, which occurs when one end of the wire is ungrounded.
When EMI occurs, it typically results in signals being introduced at discrete frequencies that are related to the
signal source. The impact on measurements is dependent on the magnitude and specific frequency of the signal
that is induced. This occurrence is relative to the measurement systems design signal magnitude and frequency
range and the expected signals that are intended to be measured.
•Ground Loops
In electronics, a ground loop is caused when a device has multiple paths for electricity to flow to ground. In a
measurement system, this scenario commonly occurs when a signal wire is grounded at both ends, with each end
having another potential (resistance) to ground.
The key for accelerometer measurement systems is knowing if the machine case, or bearing housing, to which the
sensor is attached, is grounded or not. While a new machine installation can be isolated, changes are possible over
the life of the machine as wear occurs, maintenance is performed, and other changes are made.
Regardless the source, when present these signals or noise can result in significant error in measurements. The result can
be random and inexplicable machine alarms and trips, erroneous condition assessment / diagnosis, and possible damage
to the instrumentation. If the source of the noise is clear, and there is only one concern, then the corrective action is clear,
depending on the source of the problem, try the following:
8 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 9
1443 Series Accelerometers Specifications
EMI
Ground the shield at both ends of the cable.
• If you tie the shield to the sensor case only, it creates a ground if the structure that the sensor is mounted on is
grounded. If the bearing housing or the machine is isolated from ground, then when you connect the shield to the
case of the sensor cannot ground the shield.
• If the ground potential through the sensor is different than ground potential through the instrumentation ground,
then a ground loop is created. The ground loop that is created can be a worse condition than the EMI problem.
• In most cases, grounding the shield at both ends must be the last resort because ground loop problems can result.
The ground loop problems can create more significant problems than the EMI issue. Make sure that the following
common wiring solutions are considered:
– Use high quality, well shielded, twisted wire cable.
– Route cable runs to avoid obvious / strong sources of EMI such as radio transmission towers, generators,
and transformers.
– If cables are routed through a J-box, make sure that shields are properly connected.
– When routing cables, make sure to cross AC power lines at right angles. Approach AC motors from a right
angle to the motor shaft and do not route wiring alongside a motor.
– At the monitor, connect the shield wires directly to ground - so do not ground it through the instrument.
Ground Loops
Isolate the shield at one end of the cable.
• In most cases, make sure that the shield is not connected to the sensor.
• A special cable or a custom made cable is required for accelerometers with two or three pin
MIL-C-5015 connectors.
• For existing installations, do not assume that the shield is not tied to the sensor case. While not connected to the
sensor case is normal practice in most locations, it doesn't mean that it is that way. Also, if the shield is connected to
the sensor case, it’s possible that the structure the sensor is mounted on has changed in respect to the ground for
other reasons.
• If continuous or intermittent EMI (RFI) sources are present, then when you isolate one end of the shield it creates
an antenna that can result in EMI (RFI) noise problems. An EMI (RFI) issue can be a worse condition than the
ground loop problem.
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 9
Page 10

1443 Series Accelerometers Specifications
API-670 Compliance
All 1443 Series sensors are compliant to the American Petroleum Institute (API) Standard 670, 5th Edition, November
2014, with the following exceptions:
• Side exit sensors have an outside diameter greater than 25 mm (1 in.) as specified by API-670 paragraph 5.2.1.5.
• Calibration frequency is 80 Hz, in accordance with ISO standard 9001-2008, rather than 100 Hz as specified in
API-670 Table 1 note f.
• Only the standard 16 ft cables are nominally 5 m (200 in.) as specified by API-670 paragraph 5.2.2.2.
• Cables do not ship with loose heat-shrink tubing for labeling, as specified by API-670 paragraph 5.2.2.3.
Perhaps the most important attribute of the sensor, per the standard, is its accuracy. The standard specifies accuracy
requirements for accelerometers in the following table.
Table 1 - Machinery Protection System Accuracy Requirements
Accelerometers and Accelerometer Extension Cables
Temperature Accuracy Requirements as a Function of Temperature
Test Range Operating / Storage Range Within Testing Range Outside Testing Range but Within Operating Range
20...30 °C
(68...86 °F)
(1) During the testing o f the accelerometers, the parameter under test is the only parameter that is varied. All other parameters remain constant.
(2) Conditions of test at any one temperature within the testing range, at any single frequency that is not specified but is within the specified frequency range of the transducer.
(3) Frequency response testing conditions, at any one temperature within the testing range, at an excitation amplitude that is not specified but is within the specified amplitude range of the transducer.
(4) Principal axis sensitivity testing conditions (test range), at any one temperature within the testing range set at 100 Hz, at an excitation amplitude that is not specified but is within the specified
amplitude range of the transducer. Operating range at any one temperature within the operating range, at 100 Hz, at an excitation amplitude that is not specified but is within the specified amplitude
range of the transducer.
–55...+120 °C
(–65...+250 °F)
Principal axis sensitivity
Amplitude linearity: 1% from 0.1...50 g peak
Frequency response
referenced to the actual measured principal axis
(4)
sensitivity
(4)
: 100 mV/g ± 5%
(3)
: ±3 dB from 10 Hz to 10 kHz,
(2)
(1)
Principal axis sensitivity
(4)
: 100 mV/g ± 20%
The 1443 Series sensor is ± 5% across the entire operating range of the sensor. This sensor range significantly exceeds the
requirement of only testing within the temperature range. Among sensors advertised as API compliant, this provides a
much more consistent and accurate measurement than most sensors compared to the requirement of just ±20%.
IMPORTANT Sensors manufactured earlier than October 2017 can have sensitivity variances of up to ± 10% across the operating range.
10 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 11

1443 Series Accelerometers Specifications
Sensor Quick Reference
General-purpose Accelerometers
General-purpose industrial accelerometers are recommended for permanent installation onto machinery or route-based
vibration data collection in predictive maintenance and condition-monitoring applications.
Table 2 - General-purpose Accelerometers
Purpose Cat. No Features Page
General-purpose Accelerometer 1443-ACC-GP-T • 100 mV/g
1443-ACC-GP-S • 100 mV/g
General-purpose Accelerometer
(with Integral Cable)
(1) S ensors with the shield wire grounded to the case are non-standard. See Shield Wire Isolation Sensor and Cable Selection on page 8 before ordering.
1443-ACC-GP-T16-SI • Integral ~5 m (16 ft) Cable
1443-ACC-GP-T32-SI • Integral ~10 m (32 ft) Cable
1443-ACC-GP-T16-SC • Integral ~5 m (16 ft) Cable
1443-ACC-GP-T32-SC • Integral ~10 m (32 ft) Cable
• 0.8…19 kHz
•Top Exit
• 0.2…15 kHz
• Side Exit
• 100 mV/g
• 0.8…15 kHz
•Top Exit
• 100 mV/g
• 0.8…15 kHz
•Top Exit
• Shield Case Grounded Cable
• 100 mV/g
• 0.8…15 kHz
•Top Exit
• Shield Case Grounded Cable
• 100 mV/g
• 0.8…15 kHz
•Top Exit
(1)
(1)
14
16
18
20
22
24
Sensors with Integral Cables
Included in the list of 1443 Series general-purpose Accelerometers are variants of the sensor that include integral 4.8 m
(16 ft) and 9.7 m (32 ft) cables. Sensors with an integrated cable are useful in wet or dirty (high particulate) areas.
Low Frequency Accelerometer
The accelerometer combines low-frequency response with high-output sensitivity to obtain the resolution characteristics
and output signal levels necessary for low-frequency measurements and analysis.
Table 3 - Low Frequency Accelerometer
Purpose Cat. No Features Page
Low Frequency Accelerometer 1443-ACC-LF-T • 500 mV/g
• 1.5…10 kHz (5%)
• 0.1…15 kHz (3db)
•Top Exit
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 11
26
Page 12
1443 Series Accelerometers Specifications
High Frequency Accelerometer
When you test, monitor vibrations, and analyze the frequency of machinery where frequencies greater than
approximately 15 kHz, the frequencies must be measured.
Table 4 - High Frequency Accelerometer
Purpose Cat. No Features Page
High Frequency Accelerometer 1443-ACC-HF-T • 50 mV/g
• 0.8…20 kHz
•Top exit
28
Specialty Accelerometers
These sensors are available for applications that require velocity output and temperature output from the sensor.
•Velocity Output
• Acceleration and Temperature
Table 5 - Specialty Accelerometers
Purpose Cat. No Features Page
Velocity Output Accelerometer 1443-ACC-VO-T Output is integrated to velocity
100 mV/ips
2…6 kHz
Output ±50 in/s
Top Exit
Velocity Output Accelerometer 1443-ACC-VO-S Output is integrated to velocit y
100 mV/ips
2…6 kHz
Output ±50 in/s
Side Exit
Combination Acceleration and Temperature 1443-ACC-AT-T 100 mV/g
0.8…15 kHz
10 mV/°C
Top Exit
Combination Acceleration and Temperature 1443-ACC-AT-S 100 mV/g
0.8…15 kHz
10 mV/°C
Side Exit
30
32
34
36
12 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 13
1443 Series Accelerometers Specifications
Intrinsically Safe Accelerometers
Intrinsically safe sensors meet additional requirements for hazardous environments. See specification tables for a list of
certifications.
Table 6 - Intrinsically Safe Accelerometers
Purpose Cat. No Features Page
Hazardous Area Accelerometer 1443-ACC-IS-T • 100 mV/g
• 0.8…15 kHz
•Top Exit
1443-ACC-IS-S • 100 mV/g
• 0.8…15 kHz
• Side Exit
38
40
Hall-effect Speed Sensor
Catalog number EK-44395 is an Airpax Model H1512-005 hall-effect sensor that is designed to generate a steady pulse
train in response to movement of a target surface.
The EK-44395 Hall-effect Speed Sensor outputs a TTL signal that is suitable for use as a direct speed input to the
Dynamix™ 1444-DYN04-01RA monitor. See Ta b l e 2 1
on page 42.
Metric and Imperial Mounting
Sensor mounting accessories are included with the accelerometer, see Supplied Accessories in the specification tables.
Options exist to mount the sensor on the machine end, in either in Metric or Imperial units, as denoted by the ‘Mounting
Thread’ attribute in the following tables for each sensor.
Top exit sensors have a 1/4-28 UNF female thread on the sensor end. Two studs are included, both with one 1/4-28
UNF male end (for the sensor). The other end has either an M8 x 1.25 mm male thread or a 1/4-28 UNF male thread for
mounting on the machine.
Side exit sensors have a through hole. Bolts are included with a machine mounting thread of either M6 x 1.00 mm male
or 1/4-28 UNF male.
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 13
Page 14

1443 Series Accelerometers Specifications
Sensors
1443-ACC-GP-T Accelerometer
General-purpose industrial accelerometers are recommended for permanent installation onto machinery or route-based
vibration data collection in predictive maintenance and condition-monitoring applications.
Table 7 - 1443-ACC-GPT-T Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Measurement range ±785 m/s
Frequency range (±5%)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Resonant frequency, typical 28 kHz 1680 kcpm
Broadband resolution (1…10,000 Hz), typical 2943
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure Rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 2...20 mA 2...20 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 19 x 36 mm 3/4 x 1.42 in.
Weight, approx. 48 g 1.7 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Shear
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin-MIL-C-5015
Electrical connector position Top
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
10.2 mV/(m/s2)100 mV/g
2
±80 g
1.5…10 kHz 90…600,000 cpm
2
μm/s
300 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
Calibration Certificate
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-base d, least-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) Calibration @80 Hz per ISO 9001-200 83
14 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 15

Figure 5 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
in.
Figure 6 - 1443-ACC-GP-T Measurements
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 15
Page 16
1443 Series Accelerometers Specifications
1443-ACC-GP-S Accelerometer
General-purpose industrial accelerometers are recommended for permanent installation onto machinery or route-based
vibration data collection in predictive maintenance and condition-monitoring applications.
Table 8 - 1443-ACC-GP-S Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
(1)
Measurement range ±785 m/s
Frequency range (±5%)
(2)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Resonant frequency, typical 22 kHz 1500 kcpm
Broadband resolution (1…10,000 Hz), typical 491
Non-linearity
(3)
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 2…20 mA 2…20 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 25 x 30 x 35 mm 1 x 1.18 x 1.38 in.
Weight, approx. 170 g 6.0 oz
Mounting thread
(4)
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin-MIL-C-5015
Electrical connector position Side
Supplied Accessories
(5)
10.2 mV/(m/s2) 100 mV/g
2
±80 g
1.5…10 kHz 90…600,000 cpm
2
μm/s
50 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M6 x 1 mm male 1/4-28 UNF male
1443-BLT-125-0
1443-BLT-125-M6
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
16 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 17
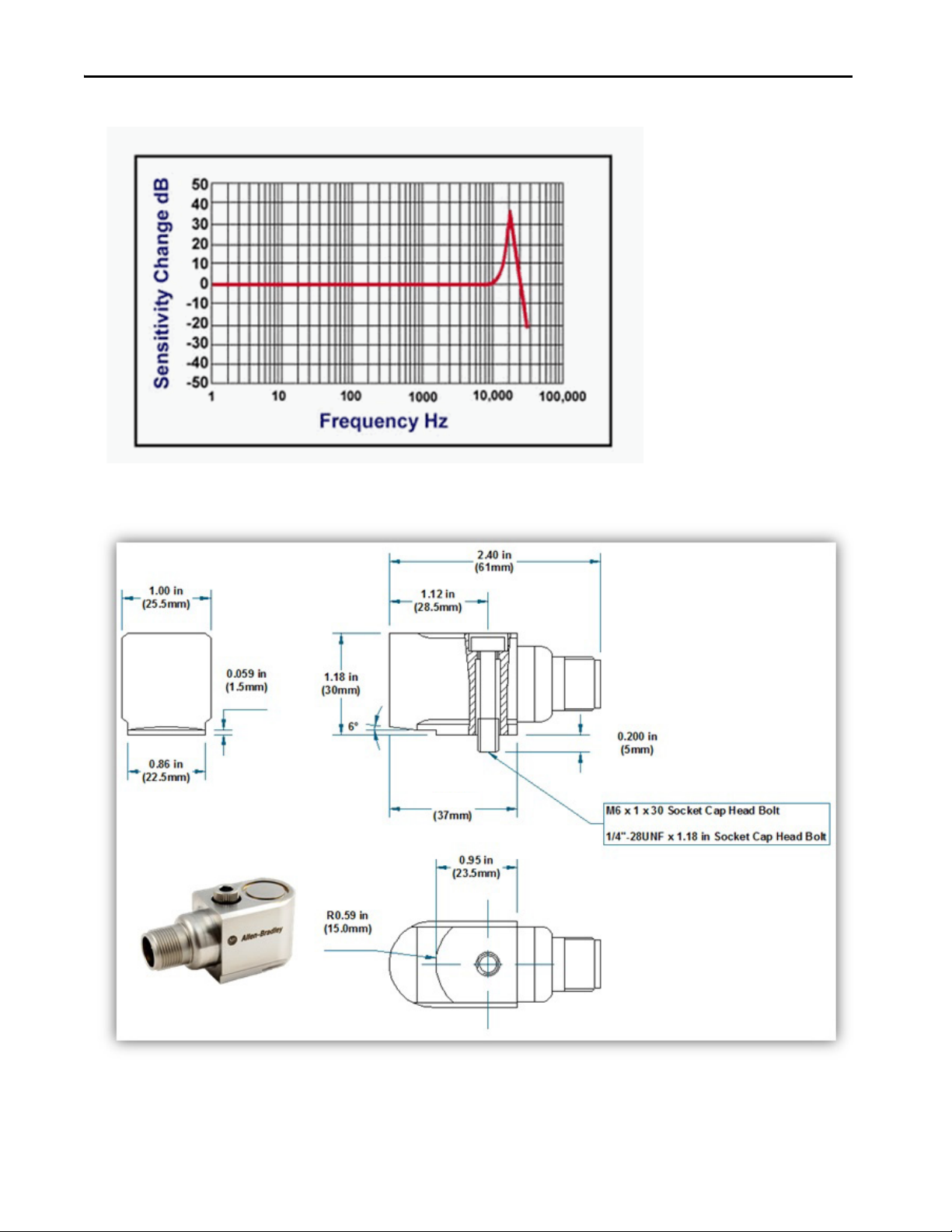
Figure 7 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
1.46 in.
Figure 8 - 1443-ACC-GP-S Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 17
Page 18
1443 Series Accelerometers Specifications
1443-ACC-GP-T16-SI Accelerometer
General-purpose industrial accelerometers are recommended for permanent installation onto machinery or route-based
vibration data collection in predictive maintenance and condition-monitoring applications.
Table 9 - 1443-ACC-GP-T16-SI Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Measurement range ±785 m/s
Frequency range (±5%)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Resonant frequency, typical 28 kHz 1680 kcpm
Broadband resolution (1…10,000 Hz), typical 2943
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 0.5…8 mA 0.5…8 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 19 x 36 mm 3/4 x 1.42 in.
Weight, approx. 48 g 1.7 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Top
Cable Length 5 m 16 ft
Cable Type Shielded Silicone
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
10.2 mV/(m/s2) 100 mV/g
2
±80 g
1.2…10 kHz 72…600,000 cpm
2
μm/s
300 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
18 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 19

(4) 1/4-28 UNF has no equivalent in metric units.
16 ft
5 m
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
Figure 9 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
1443 Series Accelerometers Specifications
Figure 10 - 1443-ACC-GP-T16-SI Accelerometer
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 19
Page 20

1443 Series Accelerometers Specifications
1443-ACC-GP-T32-SI Accelerometer
General-purpose industrial accelerometers are recommended for permanent installation onto machinery or route-based
vibration data collection in predictive maintenance and condition-monitoring applications.
Table 10 - 1443-ACC-GP-T32-SI Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Measurement range ±785 m/s
Frequency range (±5%)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Resonant frequency, typical 28 kHz 1680 kcpm
Broadband resolution (1…10,000 Hz), typical 2943
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 0.5…8 mA 0.5…8 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 19 x 36 mm 3/4 x 1.42 in.
Weight, approx. 48 g 1.7 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connec tor Two-pin MIL-C-5015
Electrical connector position Top
Cable Length 10 m 32 ft
Cable Type Shielded Silicone
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
10.2 mV/(m/s2) 100 mV/g
2
±80 g
1.2…10 kHz 72…600,000 cpm
2
μm/s
300 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
20 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 21

Figure 11 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
Figure 12 - 1443-ACC-GP-T32-SI Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 21
Page 22

1443 Series Accelerometers Specifications
1443-ACC-GP-T16-SC Accelerometer
General-purpose industrial accelerometers are recommended for permanent installation onto machinery or route-based
vibration data collection in predictive maintenance and condition-monitoring applications. Sensors with the shield wire
that is grounded to the case are non-standard. See Shield Wire Isolation Sensor and Cable Selection
Table 11 - 1443-ACC-GP-T16-SC Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Measurement range ±785 m/s
Frequency range (±5%)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Resonant frequency, typical 28 kHz 1680 kcpm
Broadband resolution (1…10,000 Hz), typical 2943 μm/s
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s2 pk 5000 g pk
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 0.5…8 mA 0.5…8 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 1010 Ω> 10
Electrical protection 500V 500V
Physical
Size (hex x height) 19 x 36 mm 3/4 x 1.42 in.
Weight, approx. 48 g 1.7 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Top
Cable Length 5 m 16 ft
Cable Type Shielded Silicone
Cable Grounding Shield Case Grounded
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
10.2 mV/(m/s2)100 mV/g
2
±80 g
1.2…10 kHz 72…600,000 cpm
2
300 μg
±1% ±1%
10
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
on page 8 ordering.
(1) S ensitivity tolerance is across the operating temperature range. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
22 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 23

Figure 13 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
Figure 14 - 1443-ACC-GP-T16-SC Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 23
Page 24

1443 Series Accelerometers Specifications
1443-ACC-GP-T32-SC Accelerometer
General-purpose industrial accelerometers are recommended for permanent installation onto machinery or route-based
vibration data collection in predictive maintenance and condition-monitoring applications. Sensors with the shield wire
that is grounded to the case are non-standard. See Shield Wire Isolation Sensor and Cable Selection
Table 12 - 1443-ACC-GP-T32-SC Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Measurement range ±785 m/s
Frequency range (±5%)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Resonant frequency, typical 28 kHz 1680 kcpm
Broadband resolution (1…10,000 Hz), typical 2943 μm/s
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s2 pk 5000 g pk
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 0.5…8 mA 0.5…8 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 1010 Ω> 10
Electrical protection 500V 500V
Physical
Size (hex x height) 19 x 36 mm 3/4 x 1.42 in.
Weight, approx. 48 g 1.7 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Top
Cable Length 10 m 32 ft
Cable Type Shielded Silicone
Cable Grounding Shield Case Grounded
Supplied Accessories
(1) S ensitivity tolerance is across the operating temperature range. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
(1)
(2)
(3)
(4)
(5)
10.2 mV/(m/s2)100 mV/g
2
±80 g
1.2…10 kHz 72…600,000 cpm
2
300 μg
±1% ±1%
10
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
on page 8 ordering.
24 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 25

Figure 15 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
Figure 16 - 1443-ACC-GP-T32-SC Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 25
Page 26

1443 Series Accelerometers Specifications
1443-ACC-LF-T Accelerometer
The accelerometer combines low-frequency response with high-output sensitivity to obtain the resolution characteristics
and output signal levels necessary for low-frequency measurements and analysis.
Table 13 - 1443-ACC-LF-T Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
(1)
Measurement range ±157 m/s
Frequency range (±5%)
(2)
Frequency range (±3 dB) 0.2…15 kHz 12…900,000 cpm
Resonant frequency, typical 25 kHz 1500 kcpm
Broadband resolution (1…10,000 Hz), typical 490
Non-linearity
(3)
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 2…20 mA 2…20 mA
Output impedance <100 Ω <100 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 25 x 40 mm 1 x 1.6 in.
Weight, approx. 110 g 3.9 oz
Mounting thread
(4)
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Top
Supplied Accessories
(5)
51 mV/(m/s2)500 mV/g
2
±16 g
1.2…10 kHz 72…600,000 cpm
2
μm/s
50 μg
±1% ±1%
2
pk 5000 g pk
8
Ω> 10
8
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
26 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 27

Figure 17 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
in.
in.
Figure 18 - 1443-ACC-LF-T Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 27
Page 28

1443 Series Accelerometers Specifications
1443-ACC-HF-T Accelerometer
Table 14 - 1443-ACC-HF-T Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Measurement range ±1570 m/s
Frequency range (±5%)
Frequency range (±3 dB) 0.8…20 kHz 48…1,200,000 cpm
Resonant frequency, typical 28 kHz 1680 kcpm
Broadband resolution (1…10,000 Hz), typical 2943
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28 V DC 18…28 V DC
Constant current excitation 0.5…8 mA 0.5…8 mA
Output impedance <200 Ω <200 Ω
Output bias voltage 10…12 V DC 10…12 V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 19 x19 mm 3/4 x 0.75 in.
Weight, approx. 48 g 1.7 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Shear
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Top
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
51 mV/(m/s2) 50 mV/g
2
±160 g
2…14 kHz 120…840,000 cpm
2
μm/s
300 μg
±1% ±1%
2
pk 5000 g pk
8
Ω> 10
8
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
28 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 29

Figure 19 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
Figure 20 - 1443-ACC-HF-T Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 29
Page 30
1443 Series Accelerometers Specifications
1443-ACC-VO-T Accelerometer
Table 15 - 1443-ACC-VO-T Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Output ±1.27 m/s ±50 in/s
Measurement range Peak ±1000 mm/s ±39.4 in/s
Frequency range (±10%)
Frequency range (±3 dB) 2…6 kHz 120…360,000 cpm
Resonant frequency, typical 22 kHz 1320 kcpm
Broadband resolution (1…10,000 Hz), typical 11.4
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28 V DC 18…28 V DC
Constant current excitation 2…10 mA 2…10 mA
Output impedance <200 Ω <200 Ω
Output bias voltage 10…12 V DC 10…12 V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 25 x 40 mm 1 x 1.6 in.
Weight, approx. 110 g 3.9 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Top
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
4 mV/(mm/s) 100 mV/(in/s)
3.5…4 kHz 210…240,000 cpm
μm/s 450 μin./s
±1% ±1%
2
pk 5000 g pk
8
Ω> 10
8
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
30 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 31

Figure 21 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
in.
in.
Figure 22 - 1443-ACC-VO-T Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 31
Page 32

1443 Series Accelerometers Specifications
1443-ACC-VO-S Accelerometer
Table 16 - 1443-ACC-VO-S Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Output ±1.27 m/s ±50 in/s
Measurement range Peak ±1000 mm/s ±39.4 in/s
Frequency range (±10%)
Frequency range (±3 dB) 2…6 kHz 120…360,000 cpm
Resonant frequency, typical 22 kHz 1320 kcpm
Broadband resolution (1…10,000 Hz), typical 11.4
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28 V DC 18…28 V DC
Constant current excitation 2...10 mA 2...10 mA
Output impedance <200 Ω <200 Ω
Output bias voltage 10…12 V DC 10…12 V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 25 x 35 x 30 mm 1 x 1.4 x 1.2 in
Weight, approx. 170 g 6.0 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Side
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
4 mV/(mm/s) 100 mV/(in/s)
3.5…4 kHz 210…240,000 cpm
μm/s 450 μin./s
±1% ±1%
2
pk 5000 g pk
8
Ω> 10
8
Ω
M6 x 1 mm male 1/4-28 UNF male
1443-BLT-125-0
1443-BLT-125-M6
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
32 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 33

Figure 23 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
1.46 in.
Figure 24 - 1443-ACC-VO-S Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 33
Page 34

1443 Series Accelerometers Specifications
1443-ACC-AT-T Accelerometer
Table 17 - 1443-ACC-AT-T Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
(1)
Sensitivity Temperature 10 mV/°C 5.56mV/°F
Measurement range ±785 m/s
Frequency range (±5%)
(2)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Temperature range 0…100 °C 32…212 °F
Resonant frequency, typical 22 kHz 1320 kcpm
Broadband resolution (1…10,000 Hz), typical 2943
Non-linearity
(3)
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 2…20 mA 2…20 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 25 x 40 mm 1 x 1.6 in.
Weight, approx. 110 g 3.9 oz
Mounting thread
(4)
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Three-pin MIL-C-5015
Electrical connector position Top
Supplied Accessories
(5)
10.2 mV/(m/s2) 100 mV/g
2
±80 g
1.5…10 kHz 90…600,000 cpm
2
μm/s
300 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
34 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 35

Figure 25 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
in.
in.
Figure 26 - 1443-ACC-AT-T Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 35
Page 36

1443 Series Accelerometers Specifications
1443-ACC-AT-S Accelerometer
Table 18 - 1443-ACC-AT-S Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
Sensitivity Temperature 10 mV/°C 5.56mV/°F
Measurement range ±785 m/s
Frequency range (±5%)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Temperature range 0…100 °C 32…212 °F
Resonant frequency, typical 22 kHz 1320 kcpm
Broadband resolution (1…10,000 Hz), typical 2943
Non-linearity
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+140 °C -67…+284 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 2…20 mA 2…20 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 25 x 30 x 35mm 1 x 1.18 x 1.38 in
Weight, approx. 170 g 6.0 oz
Mounting thread
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Three-pin MIL-C-5015
Electrical connector position Side
Supplied Accessories
(1)
(2)
(3)
(4)
(5)
10.2 mV/(m/s2) 100 mV/g
2
±80 g
1.5…10 kHz 90…600,000 cpm
2
μm/s
300 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M6 x 1 mm male 1/4-28 UNF male
1443-BLT-125-0
1443-BLT-125-M6
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
36 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 37

Figure 27 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
1.46 in.
Figure 28 - 1443-ACC-AT-S Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 37
Page 38

1443 Series Accelerometers Specifications
1443-ACC-IS-T Accelerometer
Table 19 - 1443-ACC-IS-T Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
(1)
Measurement range ±785 m/s
Frequency range (±5%)
(2)
Frequency range (±3 dB) 0.4…15 kHz 24…900,000 cpm
Resonant frequency, typical 28 kHz 1680 kcpm
Broadband resolution (1…10,000 Hz), typical 2943
Non-linearity
(3)
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+110 °C -67…+230 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation 2…20 mA 2…20 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 19 x36 mm 3/4 x 1.42 in.
Weight, approx. 48 g 1.7 oz
Mounting thread
(4)
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connector Two-pin MIL-C-5015
Electrical connector position Top
Supplied Accessories
(5)
10.2 mV/(m/s2)100 mV/g
2
±80 g
1.5…10 kHz 90…600,000 cpm
2
μm/s
300 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M8 x 1.25 mm male 1/4-28 UNF male
1443-STD-0-0
1443-STD-0-M8
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Sensor is compliant to API Standard 670, 5th Edition. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
38 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 39

Figure 29 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
in.
in.
Figure 30 - 1443-ACC-IS-T Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 39
Page 40

1443 Series Accelerometers Specifications
1443-ACC-IS-S Accelerometer
Table 20 - 1443--ACC-IS-S Accelerometer Specifications
Attribute Value
Performance
Sensitivity (±5%)
(1)
Measurement range ±785 m/s
Frequency range (±5%)
(2)
Frequency range (±3 dB) 0.84…15 kHz 24…900,000 cpm
Resonant frequency, typical 22 kHz 1500 kcpm
Broadband resolution (1…10,000 Hz), typical 491
Non-linearity
(3)
Transverse sensitivity < 5% < 5%
Environmental
Overload limit (shock) 49,050 m/s
Temperature range -55…+110 °C -67…+230 °F
Enclosure rating IP66 to 68, depending upon the cable assembly used. IP66 to 68, depending upon the cable assembly used.
Electrical
Settling time (within 1% of bias) < 2.0 s < 2.0 s
Discharge time constant ≥ 0.5 s ≥ 0.5 s
Excitation voltage 18…28V DC 18…28V DC
Constant current excitation … 2…20 mA
Output impedance <150 Ω <150 Ω
Output bias voltage 10…12V DC 10…12V DC
Electrical isolation (case) > 10
Electrical protection 500V 500V
Physical
Size (hex x height) 25 x 30 x 35 mm 1 x 1.18 x 1.38 in
Weight, approx. 170 g 6.0 oz
Mounting thread
(4)
Mounting torque 8 N•m 6 ft•lb
Sensing element Ceramic
Sensing geometry Compression
Housing material Stainless Steel
Sealing Welded hermetic
Electrical connec tor Two-pin MIL-C-5015
Electrical connector position Side
Supplied Accessories
(5)
10.2 mV/(m/s2) 100 mV/g
2
±80 g
1.5…10 kHz 90…600,000 cpm
2
μm/s
50 μg
±1% ±1%
2
pk 5000 g pk
10
Ω> 10
10
Ω
M6 x 1 mm male 1/4-28 UNF male
1443-BLT-125-0
1443-BLT-125-M6
ICS-3 3 pt calibration
(1) S ensitivity tolerance is across the operating temperature range. Conversion factor 1 g = 9.81 m/s2.
(2) 1 Hz = 60 cpm (cycles per minute).
(3) Zero-based, le ast-squares, straight-line method.
(4) 1/4-28 UNF has no equivalent in metric units.
(5) ICS-3 3 pt calibration 10 Hz, 100 Hz, 1 kHz.
40 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 41

Figure 31 - Sensitivity Change vs. Frequency for the Accelerometer (Same for All 1443 Series)
1.46 in.
Figure 32 - 1443-ACC-IS-S Accelerometer
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 41
Page 42

1443 Series Accelerometers Specifications
Hall-effect Speed Sensor
The EK-44395 Hall-effect Speed Sensor outputs a TTL signal that is suitable for use as a direct speed input to the
Dynamix™ 1444-DYN04-01RA monitor.
The sensor can be used with any 3-wire accelerometer cable, which is listed inTab l e 2 6
Table 21 - EK-44395 Hall-effect Speed Sensor Specifications
Attribute Value
Frequency range Near 0…15 kHz
Power supply voltage 4.5…24V DC
Reverse voltage protection Up to -30V DC
Temperature range -40…+125 °C (-40…+257 °F)
TTL compatible logic 50% ± 30% duty cycle
Housing material 300 series stainless steel
Tar get air gap
01.27…0.508 mm (0.005…0.20 in.) With 20 diametric pitch gear
01.27…1.143 mm (0.005…0.45 in.) With 12 diametric pitch gear
01.27…1.524 mm (0.005…0.60 in.) With 28 diametric pitch gear
on page 51.
Sensor Certifications and Approvals
Table 22 - Sensor Certifications
Certification
Entity Parameters Ui = Vmax = 28V, Ii=lmax=93 mA, PI=0.65 W, CI=1.0 nF, Li=zero
Temperature, ambient, max. Hazardous Area - North America-55 °C…+110 °C (-67…+230 °F)
Temperature Codes For Div 1,2 Groups A-G
Cable Assemblies
For use with 1443-ACC-IS-S
and 1443-ACC-IS-T
Wiring Categor y
(1)
(When Product Is Marked) 1443-ACC-IS-S and 1443-ACC-IS-T
Hazardous Area - ATEX-55 °C…+110 °C (-67…+230 °F)
Hazardous Area - IECEx-55 °C…+110 °C (-67…+230 °F)
T4 (-55…+110 °C) (-67…+230 °F)
T6 (-55…+60 °C) (-67…+140 °F)
For Zone 20, Dust group IIIC
T130 °C (-55…+110 °C) (-67…+230 °F)
T80 °C (-55…+60 °C) (-67…+140 °F)
For Class I Zone 0 gas group IIC
T4 (-55…+110 °C) (-67…+230 °F)
ATEX and IECEx:
For Ex ia IIC
T4 (-55…+110 °C) (-67…+230 °F)
T6 (-55…+60 °C) (-67…+140 °F)
For Ex ia IIIC
T130 °C (-55…+110 °C) (-67…+230 °F)
T80 °C (-55…+60 °C) (-67…+140 °F)
1443-CBL-MS2IBC
1443 -CBL-MS2IBC-50A - tighten to 4 N•m (2.95 lb•ft) , temperature range: -40…+100 °C (-40…+212 °F)
1443-CBL-MS2IBC - rated IP66
1443-CBL-MS2GBC - push on connection, temperature range: -50…+110 °C (-58…+230 °F)
1443-CBL-MS2GBC - rated IP68
1443-CBL must conform with Rockwell Automation® Environmental Specification 970-20-01
(2)
2 - on shielded signal ports
42 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 43

Table 22 - Sensor Certifications (Continued)
Ex European Union 94/9/EC ATEX Directive, compliant with:
EN 60079-0:2010+A11:2013; General Requirements
EN 60079-11:2012 Explosive Atmospheres, Protection `i’
I M1 Ex ia I Ma -55 °C<Ta<+110 °C (-67…+230 °F)
II 1 G Ex ia IIC T4 Ga -55 °C <Ta<+110 °C (-67…+230 °F)
II 1 G Ex ia IIC T6 Ga -55 °C <Ta<+60 °C (-67…+140 °F)
II 1 D Ex ia IIIC T130°C IP65 Da -55 °C <Ta<+110 °C (-67…+230 °F)
II 1 D Ex ia IIIC T80°C IP65 Da -55 °C <Ta<+60 °C (-67…+140 °F)
Baseefa15ATEX0101X
Baseefa15ATEX0100
IECEx IECEx System, compliant with:
IEC 60079-0:2011 Edition 6; General Requirements
IEC 60079-11:2011 Edition 6; Explosive Atmospheres, Protection `i‘
Ex ia I Ma -55 °C<Ta<+110 °C (-67…+230 °F)
Ex ia IIC T4 Ga -55 °C<Ta<+110 °C (-67…+230 °F)
Ex ia IIC T6 Ga -55 °C<Ta<+60 °C (-67…+140 °F)
Ex ia IIIC T130°C IP65 Da -55 °C <Ta<+110 °C (-67…+230 °F)
Ex ia IIIC T80°C IP65 Da -55 °C <Ta<+60 °C (-67…+140 °F)
IECEx BAS 15.0073X
IECEx BAS 15.0072
c-SGS-us SGS Certified Process Control Equipment for Class I, Zone 0
Hazardous Locations, which are certified for US and Canada. See SGS File USTC/15/FAI/01350
AEx, ia, IIC, T4, Ga, -55°C…+110 °C (-67…+230 °F)
c-SGS-us SGS Certified Process Control Equipment for Zone 20
Hazardous Locations, which are certified for US and Canada. See SGS File USTC/15/FAI/01350
AEx, ia, IIIC, T130°C, IP65, Da, -55 °C…+110 °C
AEx, ia, IIIC, T80°C, IP65, Da, -55 °C…+60 °C
c-SGS-us SGS Certified Process Control Equipment for Class I, II, III Division 1, 2 Group A-G
Hazardous Locations, which are certified for US and Canada. See SGS File USTC/15/FAI/01350
T4, -55 °C…+110 °C, IP65
T6, -55 °C…+60 °C
(1) See the Product Certification link at www.ab.com for Declarations of Conformity, Certificates, and other certification details.
(2) Use this conductor c ategory information to plan conduc tor routing. See Industrial Automation Wiring and Grounding Guidelines, publication 1770-4.1
1443 Series Accelerometers Specifications
.
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 43
Page 44

1443 Series Accelerometers Specifications
Accessories
This section describes the accessories that are available for the sensors.
Cables
These cables are available for the two-pin sensors.
Table 23 - Cables for Two-pin Sensors
Catalog Number Description
1443-CBL-MS2IBC-16S 16 ft of silicone twisted shielded pair cable w/ molded 2-pin mil connector and terminated to blunt cut, shield isolated from the connector
1443-CBL-MS2IBC-32S 32 ft of silicone twisted shielded pair cable w/ molded 2-pin mil connector and terminated to blunt cut, shield isolated from the connector
1443-CBL-MS2IBC-64S 64 ft of silicone twisted shielded pair cable w/ molded 2-pin mil connector and terminated to blunt cut, shield isolated from the connector
1443-CBL-MS2GBC-16S 16 ft of silicone twisted shielded pair cable w/ molded 2-pin mil connector and terminated to blunt cut, shield grounded to the connector
1443-CBL-MS2GBC-32S 32 ft of silicone twisted shielded pair cable w/ molded 2-pin mil connector and terminated to blunt cut, shield grounded to the connector
1443-CBL-MS2GBC-64S 64 ft of silicone twisted shielded pair cable w/ molded 2-pin mil connector and terminated to blunt cut, shield grounded to the connector
1443 -CBL-MS2IBC-50A 50 ft of stainless steel armored jacket over polyurethane twisted shielded pair cable w/ 2-pin mil (AM) connector and terminated to blunt cut,
shield isolated from the connector
(1) Cables with the shield that is grounded to the connector are non-standard. See Shield Wire Isolation Sensor and Cable Selection on page 8 before ordering.
(1)
(1)
(1)
TIP Before selecting a `GBC’ version cable, see Shield Wire Isolation Sensor and Cable Selection on page 8.
44 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 45
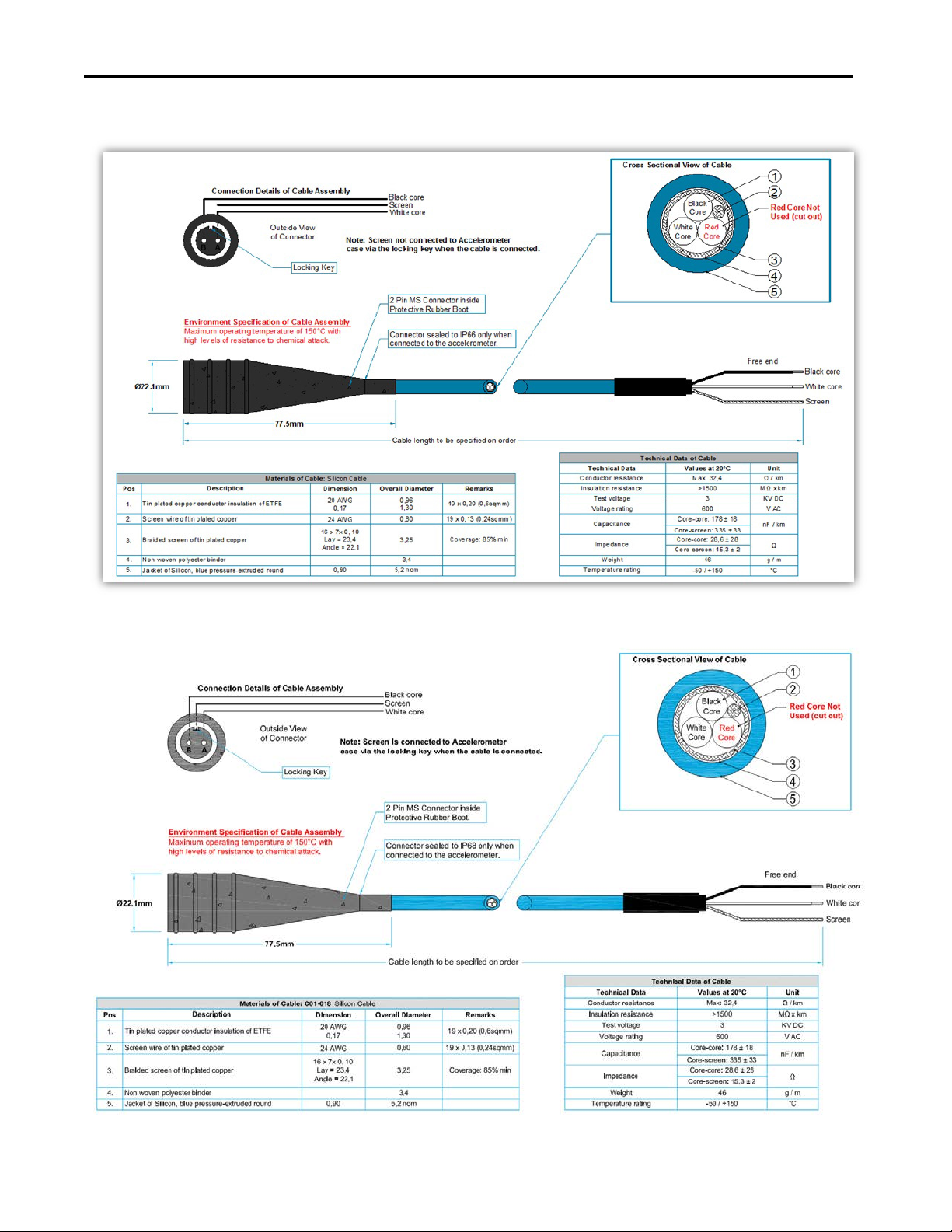
Figure 33 - 1443-CBL-MS2IBC
1443 Series Accelerometers Specifications
Figure 34 - 1443-CBL-MS2GBC
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 45
Page 46

1443 Series Accelerometers Specifications
Figure 35 - 1443 -MS2IBC-50A
46 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 47

1443 Series Accelerometers Specifications
Table 24 - Cables for Three-pin Sensors
Catalog Number Description
1443-CBL-BC3BC-500 Bulk spool of 500 ft of silicone t wisted shielded 3-conductor cable
1443-CBL-MS3IBC-16S 16 ft of silicone twisted shielded 3-conductor cable w/ molded 3-pin mil connector and terminated to blunt cut, shield
isolated from the connector
1443-CBL-MS3IBC-64S 64 ft of silicone twisted shielded 3-conductor cable w/ molded 3-pin mil connector and terminated to blunt cut, shield
isolated from the connector
1443-CBL-MS3IBC-112S 112 ft of silicone twisted shielded 3-conductor cable w/ molded 3-pin mil connector and terminated to blunt cut, shield
isolated from the connector
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 47
Page 48

1443 Series Accelerometers Specifications
Figure 36 - 1443-CBL-BC3BC-500
Figure 37 - 1443-CBL-MS3IBC (All Lengths)
48 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 49

Table 25 - Adapter Cables
Catalog Number Description
1443-CBL-MSILM-6 Coiled data collector sensor cable, Two-pin ms to lemo, top
1443-CBL-MSILM-50 50 ft, data collector balancing cable, Two-pin ms to lemo, top
1443-CBL-LMBNC-1 1 foot, lemo to BNC adapter
Figure 38 - 1443-CBL-MSILM-6
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 49
Page 50

1443 Series Accelerometers Specifications
Figure 39 - 1443-CBL-MSILM-50
Figure 40 - 1443-CBL-LMBNC-1
50 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 51

Connectors
Table 26 - Connectors
Catalog Number Description
1443-CON-MS2-SP Qty 5: silicon boot, splash proof, push on: Two-pin ms, top exit
1443-CON-MS3-SP Qty 5: silicon boot, splash proof, push on: Three-pin ms, top exit
Figure 41 - 1443-CON-MS2-SP & 1443-CON-MS3-SP
Mounting Accessories
Table 27 - Mounting Accessories
Catalog Number Description
1443-MAG-075C-14
1443-MAG-075F-15
1443-MAG-100C-35
1443-MAG-100F-35
1443-MAG-150C-55
1443-MAG-150F-50
1443-STD-0-0 Mounting Stud - 1/4-28 to 1/4-28
1443-STD-0-M8 Mounting Stud - 1/4-28 to M8
1443-BLT-125-M6 Through bolt - M6
1443-BLT-125-0 Through bolt - 1/4-28
1443-PRB-40 Probe tip 4" length, 1/2” hex tapered to point (1/4-28)
1443-PRB-90 Probe tip 9" length with 1/4-28 stud, aluminum
1443-PAD-075-0 Mounting pad 1/4-28
(1) Magnet material: Neodymium-Iron-Boron (NdFeB)
(1)
(1)
(1)
(1)
(1)
(1)
3/4” diameter curved-surface magnet (14 lb pull, 1/4-28)
3/4” diameter flat-surface magnet (15 lb pull, 1/4-28)
1" diameter curved-surface magnet (35 lb pull, 1/4-28)
1" diameter flat-surface magnet (35 lb pull, 1/4-28)
1"-1/2” diameter curved-surface magnet (55 lb pull, 1/4-28)
1"-1/2” diameter flat-surface magnet (50 lb pull, 1/4-28)
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 51
Page 52

1443 Series Accelerometers Specifications
Figure 42 - 1443-MAG (Representative of All Sizes)—Left: Curved Surface, Right: Flat Surface
Figure 43 - 1443-STD-0-0
Figure 44 - 1443-STD-0-M8
TIP Through bolt cannot be used with EK 9000 Series side exit sensors.
52 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 53

Figure 45 - 1443-BLT-125-0
PNPN-
Figure 46 - 1443-BLT-125-M6
1443 Series Accelerometers Specifications
Figure 47 - 1443-PRB-40 / 1443-PRB-90
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 53
Page 54

1443 Series Accelerometers Specifications
Figure 48 - 1443-PAD
Spot-face Tool Kits
Table 28 - Accessory Spot-face Tool Kit
Catalog Number Description
1443-SFT-125-0 Spot-face tool kit for sensor mounting, 1.25" diameter, 1/4-28 pilot, two drill Bits, three taps, tap wrench, hex key, case
1443-SFT-125-M6 Spot-face tool kit for sensor mounting, M6 pilot, two drill Bits, three taps, tap wrench, hex key, case
1443-SFT-125-M8 Spot-face tool kit for sensor mounting, M8 pilot, two drill Bits, three taps, tap wrench, hex key, case
Figure 49 - 1443-SFT-125 (Representative for All)
54 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 55

1443 Series Accelerometers Specifications
Data Collector Sensor Kit
Table 29 - Data Collector Sensor Kit
Catalog Number Description
1443-KIT-DATACLTR0 Includes one 1443-ACC-GP-T Accelerometer, one 1443-CBL-MSILM-6 coiled cable, one 1443-MAG-075F-15 magnet mount
EK 9000 Series Compatibility
1443 Series cables and accessories are compatible with EK 9000 Series sensors except for the side exist sensor through
bolts. Through bolts 1443-BLT-125-M6 and 1443-BLT-125-0 cannot be used with EK 9000 Series sensors.
• For cables, make sure to choose the same type of cable, two pin or three pin, shield isolated (all EK 9000 Series
cables are shield isolated) cable.
• For mounting accessories, make sure to match the thread size.
See the Sensor Cross-reference - 1443 Series (New) to 9000 Series (Old)
sensors.
on page 56, to identify equivalent 1443 Series
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 55
Page 56

1443 Series Accelerometers Specifications
Sensor Cross-reference - 1443 Series (New) to 9000 Series (Old)
The EK Series sensor line is marked Rockwell Automation®. They are legacy products from Entek. The current sensors
are sourced from PCB/IMI in the U.S. Earlier versions of the same sensors were sourced from Wilcoxon Research or were
manufactured by IRD.
The 1443 Series are Allen-Bradley® branded products that are sourced from Hansford Sensors in the UK.
This project simplifies the offering from about 58 EK catalogs, including 26 sensors, to a total of 47 catalogs and just 14
sensors.
TIP The 1443 Series exclude specialty high temperature sensors or proportional output (4-20 mA) “process” sensors. These
capabilities are no longer offered.
Table 30 - Sensor Cross-reference - 1443 Series (New) to 9000 Series (Old)
Sensor Class Catalog Number Replaces
General-purpose 1443-ACC-GP-T EK-43781I
EK-43784I
EK-43792I
1443-ACC-GP-S EK-47086I
EK-47090I
1443-ACC-GP-T16-SI EK-43782I
EK-46255I
1443-ACC-GP-T32-SI EK-43782I
EK-46255I
1443-ACC-GP-T16-SC New
New
1443-ACC-GP-T32-SC New
New
Low Frequency 1443-ACC-LF-T EK-43794I
EK-43795I
EK-43797I
EK-43798I
High Frequency 1443-ACC-HF-T EK-43799I
EK-43800I
Velocity 1443-ACC-VO-T EK-43808I
1443-ACC-VO-S EK-43809I
Hazardous Area 1443-ACC-IS-T EK-43786I
EK-43787
1443-ACC-IS-S EK-43790I
EK-43791I
EK-48965
Accel and Temp 1443-ACC-AT-T New
1443-ACC-AT-S EK-43811I
56 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 57

Table 30 - Sensor Cross-reference - 1443 Series (New) to 9000 Series (Old) (Continued)
Sensor Class Catalog Number Replaces
Cable 1443-CBL-MS2IBC-16S EK-46800I
EK-44134
1443-CBL-MS2IBC-32S EK-46801I
EK-44135
1443-CBL-MS2IBC-64S EK-46802I
EK-44136
1443-CBL-MS3IBC-112S EK-46806I
1443-CBL-MSGBC-16S New
1443-CBL-MSGBC-32S New
1443-CBL-MSGBC-64S New
1443 -CBL-MSIBC-50A New
1443-CBL-BCBC-500 New
1443-CBL-MSILM-6 EK-36960-C-006
EK-36960-S-005
EK-47787
1443-CBL-MSILM-50 EK-36960-S-050
1443-CBL-LMBNC-1 EK-46252
EK-47021
Connector 1443-CON-MS2-SP EK-44144
1443-CON-MS3-SP New
Tool 1443-SFT-125-0 EK-42053
1443-SFT-125-M6 New
1443-SFT-125-M8 New
Kit 1443-KIT-DATACLTR0 EK-45148
1443 Series Accelerometers Specifications
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 57
Page 58

1443 Series Accelerometers Specifications
Table 30 - Sensor Cross-reference - 1443 Series (New) to 9000 Series (Old) (Continued)
Sensor Class Catalog Number Replaces
Mounting 1443-MAG-075C-14 EK-46670
EK-44162
EK-42118
1443-MAG-075F-15 EK-42120
1443-MAG-100C-35 EK-41717
1443-MAG-100F-35 EK-42121
1443-MAG-150C-55 EK-41529
EK-42119
EK-04332
1443-MAG-150F-50 EK-24746
EK-42123
1443-STD-0-0 EK-44151
EK-44152
EK-44153
1443-STD-0-M8 EK-44154
EK-44155
1443-BLT-125-M6 New
1443-BLT-125-0 New
1443-PRB-40 EK-41530
1443-PRB-90 EK-01103
EK-41915
1443-PAD-075-0 EK-44156
You cannot replace all EK sensors with a 1443 Series sensor. The sensors that are listed in this table are no longer offered.
Table 31 - Discontinued EK Sensors
Catalog Number Description
EK-46496 9150HTA High Temperature Accelerometer
EK-48958 9842V Process Accelerometer
EK-48964 9842VCRT Hazardous Process Accelerometer
EK-43805I 9100T High Temperature Accelerometer
EK-43807I 9150HT High Temperature Accelerometer
58 Rockwell Automation Publication 1443-TD001D-EN-P - March 2019
Page 59

1443 Series Accelerometers Specifications
Additional Resources
These documents contain additional information concerning related products from Rockwell Automation®.
Resource Description
Dynamix™ 1443 Series Sensors Product Information, publication 1443-PC001
Dynamix™ 1443 Series Sensors User Manual, publication 1443-UM001
Industrial Automation Wiring and Grounding Guidelines, publication 1770-4.1 Provides general guidelines for installing a Rockwell Automation® industrial system.
Product Certifications website, http://www.ab.com Provides declarations of conformity, certificates, and other certification details.
Included with hazardous area rated sensors, provides basic environmental, ratings,
and mounting information.
Provides complete information for mounting and cabling 1443 Series sensors.
You can view or download publications at http://www.rockwellautomation.com/literature/
. To order paper copies of
technical documentation, contact your local Allen-Bradley distributor or Rockwell Automation® sales representative.
Rockwell Automation Publication 1443-TD001D-EN-P - March 2019 59
Page 60

Rockwell Automation Support
Use the following resources to access support information.
Documentation Feedback
Your comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete the
How Are We Doing? form at http://literature.rockwellautomation.com/idc/groups/literature/documents/du/ra-du002_-en-e.pdf
.
Technical Support Center
Knowledgebase Articles, How-to Videos, FAQs, Chat,
User Forums, and Product Notification Updates.
www.rockwellautomation.com/knowledgebase
Local Technical Support Phone Numbers
Locate the phone number for your country. www.rockwellautomation.com/global/support/get-support-
now.page
Direct Dial Codes
Find the Direct Dial Code for your product. Use the
code to route your c all directly to a techni cal support
engineer.
www.rockwellautomation.com/global/suppor t/directdial.page
Literature Library
Installation Instructions, Manuals, Brochures, and
Technical Data.
www.rockwellautomation.com/literature
Product Compatibility and Download Center
(PCDC)
Get help determining how products interact, check
features and capabilities, and find associated
firmware.
www.rockwellautomation.com/global/support/pcdc.page
Rockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, Tel: +90 (216) 5698400
Rockwell Automation maintains current product environmental information on its webs ite at http://www.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page.
Allen-Bradley, Dynamix, LISTEN. THINK. SOLVE., Rockwell Automation, and Rockwell Software are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respec tive companies.
Publication 1443-TD001D-EN-P - March 2019
Supersedes Publication 1443-TD001C-EN-P - June 2017 Copyright © 2019 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.
 Loading...
Loading...