

Page 1

XM-122 gSE Vibration Module
User Guide
Firmware Revision 5
1440-VSE02-01RA
Page 2
Important User Information
WARNING
IMPORTANT
ATTENTION
SHOCK HAZARD
BURN HAZARD
Solid state equipment has operational characteristics differing from those of electromechanical equipment. Safety Guidelines for the
Application, Installation and Maintenance of Solid State Controls (publication SGI-1.1 available from your local Rockwell Automation sales
office or online at http://literature.rockwellautomation.com
wired electromechanical devices. Because of this difference, and also because of the wide variety of uses for solid state equipment, all
persons responsible for applying this equipment must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use or
application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and requirements
associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for actual use based on the
examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software described in
this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
Identifies information about practices or circumstances that can cause an explosion in a
hazardous environment, which may lead to personal injury or death, property damage, or
economic loss.
) describes some important differences between solid state equipment and hard-
Identifies information that is critical for successful application and understanding of the product.
Identifies information about practices or circumstances that can lead to personal injury or death,
property damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and
recognize the consequence
Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
dangerous voltage may be present.
Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
surfaces may reach dangerous temperatures.
Allen-Bradley, Rockwell Automation, and XM are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3
Safety Approvals
WARNING
AVERTISSEMENT
IMPORTANT
The following information applies when operating
this equipment in hazardous locations.
Products marked "CL I, DIV 2, GP A, B, C, D" are suitable
for use in Class I Division 2 Groups A, B, C, D, Hazardous
Locations and nonhazardous locations only. Each product
is supplied with markings on the rating nameplate
indicating the hazardous location temperature code.
When combining products within a system, the most
adverse temperature code (lowest "T" number) may be
used to help determine the overall temperature code of
the system. Combinations of equipment in your system
arfe subject to investigation by the local Authority Having
Jurisdiction at the time of installation.
EXPLOSION HAZARD -
•Do not disconnect equipment unless power
has been removed or the area is known to be
nonhazardous.
•Do not disconnect connections to this
equipment unless power has been removed
or the area is known to be nonhazardous.
Secure any external connections that mate to
this equipment by using screws, sliding
latches, threaded connectors, or other means
provided with this product.
•Substitution of components may impair
suitability for Class I, Division 2.
•If this product contains batteries, they must
only be changed in an area known to be
nonhazardous.
Informations sur l’utilisation de cet équipement en
environnements dangereux.
Les produits marqués "CL I, DIV 2, GP A, B, C, D" ne
conviennent qu'à une utilisation en environnements de
Classe I Division 2 Groupes A, B, C, D dangereux et non
dangereux. Chaque produit est livré avec des marquages
sur sa plaque d'identification qui indiquent le code de
température pour les environnements dangereux. Lorsque
plusieurs produits sont combinés dans un système, le
code de température le plus défavorable (code de
température le plus faible) peut être utilisé pour
déterminer le code de température global du système. Les
combinaisons d'équipements dans le système sont
sujettes à inspection par les autorités locales qualifiées
au moment de l'installation.
RISQUE D’EXPLOSION –
•Couper le courant ou s'assurer que
l'environnement est classé non dangereux
avant de débrancher l'équipement.
•Couper le courant ou s'assurer que
l'environnement est classé non dangereux
avant de débrancher les connecteurs. Fixer
tous les connecteurs externes reliés à cet
équipement à l'aide de vis, loquets
coulissants, connecteurs filetés ou autres
moyens fournis avec ce produit.
•La substitution de composants peut rendre
cet équipement inadapté à une utilisation en
environnement de Classe I, Division 2.
•S'assurer que l'environnement est classé non
dangereux avant de changer les piles.
Wiring to or from this device, which enters or leaves the system enclosure, must
utilize wiring methods suitable for Class I, Division 2 Hazardous Locations, as
appropriate for the installation in accordance with the product drawings as
indicated in the following table.
Model Catalog Number Haz Location Drawings* Model Catalog Number Haz Location Drawings*
w/o
Barriers
XM-120 1440-VST0201RA
XM-121 1440-VLF0201RA XM-360 1440-TPR0600RE
XM-122 1440-VSE0201RA XM-361 1440-TUN0600RE
XM-123 1440-VAD0201RA XM-361 1440-TTC0600RE
XM-160 1440-VDRS0600RH
XM-161 1440-VDRS0606RH XM-441 1440-REX0004RD 48241-HAZ N/A
XM-162 1440-VDRP0600RH XM-442 1440-REX0304RG 48642-HAZ N/A
XM-220 1440-SPD0201RB 48640-HAZ 48641-HAZ
48178-HAZ 48179-HAZ
51263-HAZ 51264-HAZ
* Drawings are available on the included CD
w/
Barriers
w/o
Barriers
XM-320 1440-TPS0201RB 48238-HAZ 48239-HAZ
48295-HAZ 48299-HAZ
XM-440 1440-RMA0004RC 48240-HAZ N/A
w/
Barriers
Page 4

Page 5

Introduction
Installing the XM-122 gSE
Vibration Module
Table of Contents
Chapter 1
Introducing the XM-122 gSE Vibration Module . . . . . . . . . . . . . . . . . 1
XM-122 Module Components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Using this Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Organization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Document Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Chapter 2
XM Installation Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Wiring Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Power Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Grounding Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Mounting the Terminal Base Unit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
DIN Rail Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Interconnecting Terminal Base Units . . . . . . . . . . . . . . . . . . . . . . . 15
Panel/Wall Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Connecting Wiring for Your Module . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Terminal Block Assignments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Connecting the Power Supply. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Connecting the Relays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Connecting the Tachometer Signal. . . . . . . . . . . . . . . . . . . . . . . . . 25
Connecting the Buffered Outputs . . . . . . . . . . . . . . . . . . . . . . . . . 27
Connecting the Transducer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Connecting the Remote Relay Reset Signal . . . . . . . . . . . . . . . . . . 42
Connecting the Setpoint Multiplication Switch . . . . . . . . . . . . . . . 43
Connecting the 4-20 mA Outputs . . . . . . . . . . . . . . . . . . . . . . . . . 44
PC Serial Port Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
DeviceNet Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Mounting the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Module Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Basic Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Powering Up the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Manually Resetting Relays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Chapter 3
Configuration Parameters
v Publication GMSI10-UM013D-EN-P - May 2010
XM-122 Measurement Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Measurement Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Channel Transducer Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Channel Signal Processing Parameters . . . . . . . . . . . . . . . . . . . . . . . . . 60
Measurement Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Overall Measurement Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Sum Harmonics Measurement Parameter . . . . . . . . . . . . . . . . . . . 64
Spectrum/Waveform Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Band Measurement Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Speed Measurement Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
gSE Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Page 6

Table of Contents vi
Specifications
gSE Signal Processing Parameters . . . . . . . . . . . . . . . . . . . . . . . . . 70
gSE Spectrum Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Tachometer Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Tachometer Transducer Parameters . . . . . . . . . . . . . . . . . . . . . . . . 71
Tachometer Signal Processing Parameters . . . . . . . . . . . . . . . . . . . 72
Alarm Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Relay Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4-20 mA Output Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Triggered Trend Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
SU/CD Trend Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
I/O Data Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Data Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Monitor Data Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Alarm and Relay Status Parameters . . . . . . . . . . . . . . . . . . . . . . . . 92
Device Mode Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Appendix A
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
DeviceNet Information
DeviceNet Objects
Appendix B
Electronic Data Sheets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Changing Operation Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Transition to Program Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Transition to Run Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
XM Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Invalid Configuration Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
XM-122 I/O Message Formats. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Poll Message Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
COS Message Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Bit-Strobe Message Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
ADR for XM Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Appendix C
Identity Object (Class ID 01H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
DeviceNet Object (Class ID 03H) . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Assembly Object (Class ID 04H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Class Attribute . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Publication GMSI10-UM013D-EN-P - May 2010
Page 7

Table of Contents vii
Assembly Instance Attribute Data Format. . . . . . . . . . . . . . . . . . 124
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Connection Object (Class ID 05H). . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Instances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Discrete Input Point Object (Class ID 08H) . . . . . . . . . . . . . . . . . . . 135
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Analog Input Point (Class ID 0AH) . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Parameter Object (Class ID 0FH). . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Acknowledge Handler Object (Class ID 2BH) . . . . . . . . . . . . . . . . . 147
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Alarm Object (Class ID 31DH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Band Measurement Object (Class ID 31EH) . . . . . . . . . . . . . . . . . . . 151
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Channel Object (Class ID 31FH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Auto_Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Device Mode Object (Class ID 320H) . . . . . . . . . . . . . . . . . . . . . . . . 156
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Publication GMSI10-UM013D-EN-P - May 2010
Page 8

Table of Contents viii
Overall Measurement Object (Class ID 322H) . . . . . . . . . . . . . . . . . 158
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Relay Object (Class ID 323H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Spectrum Waveform Measurement Object (Class ID 324H) . . . . . . 163
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Get_Stored_Spectrum_Chunk/Get_Stored_Waveform_Chunk 166
Get_Spectrum_Chunk/Get_Waveform_Chunk . . . . . . . . . . . . . 166
Speed Measurement Object (Class ID 325H). . . . . . . . . . . . . . . . . . . 170
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Tachometer Channel Object (Class ID 326H) . . . . . . . . . . . . . . . . . . 171
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Transducer Object (Class ID 328H) . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
Vector Measurement Object (Class ID 329H) . . . . . . . . . . . . . . . . . . 174
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
4-20 mA Output Object (Class ID 32AH) . . . . . . . . . . . . . . . . . . . . . 176
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Publication GMSI10-UM013D-EN-P - May 2010
Page 9

Wiring Connections for Previous
Module Revisions
Guidelines for Setting the Full
Scale Value
Table of Contents ix
Appendix D
Terminal Block Assignments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
Connecting the Transducer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
Connecting an IEPE Accelerometer . . . . . . . . . . . . . . . . . . . . . . 182
Connecting a Non-Contact Sensor . . . . . . . . . . . . . . . . . . . . . . . . 183
Connecting a Powered Sensor. . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Connecting Two Accelerometers and a Non-Contact Sensor. . . 186
Connecting a Velocity Sensor and Two Non-Contact Sensors. . 188
Appendix E
XM-122 Full Scale Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
Example on Using Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
Glossary
Index
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
Publication GMSI10-UM013D-EN-P - May 2010
Page 10

Table of Contents x
Publication GMSI10-UM013D-EN-P - May 2010
Page 11
Chapter
1
Introduction
This chapter provides an overview of the XM-122 gSE Vibration module. It
also discusses the components of the modules.
For information about See page
Introducing the XM-122 gSE Vibration Module 1
XM-122 Module Components 2
Using this Manual 3
Introducing the XM-122 gSE Vibration Module
The XM-122 gSE Vibration module is an intelligent 2-channel special-purpose
®
vibration monitor. It is part of the Allen-Bradley™ XM
DIN rail mounted condition monitoring and protection modules that operate
both in stand-alone applications or integrate with Programmable Logic
Controllers (PLCs) and control system networks.
The XM-122 module includes special circuitry and firmware that enables it to
measure both conventional vibration (similar to the XM-120) and g’s Spike
Energy™ (gSE). This makes the module ideal for monitoring machines with
rolling element bearings.
gSE is an Entek developed signal processing technique that provides an
accurate measure of the energy generated by transient or mechanical impacts.
The gSE measurement provides early detection of surface flaws in
rolling-element bearings, metal-to-metal contacts, insufficient bearing
lubrication, and process-related problems, such as dry running, cavitation, flow
change, and internal re-circulation.
The XM-122 alternates collection of conventional vibration measurements
and gSE overall and gSE spectra measurements. The time the module spends
updating each set of measurements during a monitoring-time is dependant on
the configuration. The module continuously monitors transducer bias and
speed as well.
Series, a family of
The XM-122 can power and accept input from standard eddy current probe
systems and Integrated Electronics Piezo Electric (IEPE) accelerometers. It
can also accept signals from most standard voltage output measurement
devices such as a velocity or pressure transducer. In addition to vibration
inputs, the XM-122 accepts one tachometer input to provide speed
measurement and order analysis functions.
1 Publication GMSI10-UM013D-EN-P - May 2010
Page 12

2 Introduction
g
S
E
V
I
B
R
A
T
I
O
N
1
4
4
0
-
V
S
E
0
2
0
1
R
A
XM-940 Dynamic Measurement Module Terminal Base Unit
Cat. No. 1440-TB-A
XM-122 gSE Vibration Module
Cat. No. 1440-VSE02-01RA
The XM-122 also includes a single on-board relay, expandable to five, an
integral tachometer, two 4-20 mA outputs, and a buffer output for each input.
The module can collect data under steady-state and startup/coast-down
conditions, capture trend and spectra or waveform data on event, and monitor
up to 16 alarms making the module a complete monitoring system.
The module can operate stand-alone, or it can be deployed on a standard or
dedicated DeviceNet network where it can provide real-time data and status
information to other XM modules, PLCs, DCS and Condition Monitoring
Systems.
The XM-122 can be configured remotely via the DeviceNet network, or locally
using a serial connection to a PC or laptop. Refer to Chapter 3 for a list of the
configuration parameters.
XM-122 Module Components
The XM-122 consists of a terminal base unit and an instrument module. The
XM-122 gSE Vibration Module and the XM-940 Terminal Base are shown
below.
Figure 1.1 XM-122 Module Components
• XM-940 Dynamic Measurement Module Terminal Base - A DIN rail
mounted base unit that provides terminations for all field wiring
required by XM Dynamic Measurement modules, including the
XM-122.
Publication GMSI10-UM013D-EN-P - May 2010
Page 13
Introduction 3
IMPORTANT
• XM-122 gSE Vibration Module - The module mounts on the XM-940
terminal base via a keyswitch and a 96-pin connector. The module
contains the measurement electronics, processors, relay, and serial
interface port for local configuration.
The XM-441 Expansion Relay module may be connected
to the XM-122 module via the XM-940 terminal base.
When connected to the module, the Expansion Relay
module simply “expands” the capability of the XM-122 by
adding four additional epoxy-sealed relays. The XM-122
controls the Expansion Relay module by extending to it the
same logic and functional controls as the on-board relay.
Using this Manual
This manual introduces you to the XM-122 gSE Vibration module. It is
intended for anyone who installs, configures, or uses the XM-122 gSE
Vibration module.
Organization
To help you navigate through this manual, it is organized in chapters based on
these tasks and topics.
Chapter 1 "Introduction" contains an overview of this manual and the
XM-122 module.
Chapter 2 "Installing the XM-122 gSE Vibration Module' describes how to
install, wire, and use the XM-122 module.
Chapter 3 "Configuration Parameters" provides a complete listing and
description of the XM-122 parameters. The parameters can be viewed and
edited using the XM Serial Configuration Utility software and a personal
computer.
Appendix A "Specifications" lists the technical specifications for the XM-122
module.
Appendix B "DeviceNet Information" provides information to help you
configure the XM-122 over a DeviceNet network.
Appendix C "DeviceNet Objects" provides information on the DeviceNet
objects supported by the XM-122 module.
Publication GMSI10-UM013D-EN-P - May 2010
Page 14
4 Introduction
TIP
EXAMPLE
Appendix D "Wiring Connections for Previous Module Revisions" provides
the terminal block assignments and wiring diagrams of earlier revisions of the
XM-122 module (before revision D01).
Appendix E "Guidelines for Setting the Full Scale Value" provides guidelines
for determining the optimal Channel Transducer Full Scale value in the
XM-122 module.
For definitions of terms used in this Guide, see the Glossary at the end of the
Guide.
Document Conventions
There are several document conventions used in this manual, including the
following:
The XM-122 gSE Vibration module is referred to as XM-122, device, or
module throughout this manual.
A tip indicates additional information which may be
helpful.
This convention presents an example.
Publication GMSI10-UM013D-EN-P - May 2010
Page 15
Chapter
ATTENTION
2
Installing the XM-122 gSE Vibration Module
This chapter discusses how to install and wire the XM-122 gSE Vibration
module. It also describes the module indicators and the basic operations of the
module.
For information about See page
XM Installation Requirements 6
Mounting the Terminal Base Unit 13
Connecting Wiring for Your Module 17
Mounting the Module 48
Module Indicators 49
Basic Operations 52
Environment and Enclosure
This equipment is intended for use in a Pollution Degree 2
Industrial environment, in overvoltage Category II applications
(as defined in IED publication 60664–1), at altitudes up to 2000
meters without derating.
This equipment is supplied as “open type” equipment. It must be
mounted within an enclosure that is suitably designed for those
specific environmental conditions that will be present, and
appropriately designed to prevent personal injury resulting from
accessibility to live parts. The interior of the enclosure must be
accessible only by the use of a tool. Subsequent sections of this
publication may contain additional information regarding specific
enclosure type ratings that are required to comply with certain
product safety certifications.
See NEMA Standards publication 250 and IEC publication
60529, as applicable, for explanations of the degrees of
protection provided by different types of enclosures.
5 Publication GMSI10-UM013D-EN-P - May 2010
Page 16
6 Installing the XM-122 gSE Vibration Module
ATTENTION
ATTENTION
XM Installation Requirements
This section describes wire, power, and grounding requirements for an XM
system.
Wiring Requirements
Use solid or stranded wire. All wiring should meet the following specifications:
• 14 to 22 AWG copper conductors without pretreatment; 8 AWG
required for grounding the DIN rail for electromagnetic interference
(emi) purposes
• Recommended strip length 8 millimeters (0.31 inches)
• Minimum insulation rating of 300 V
• Soldering the conductor is forbidden
• Wire ferrules can be used with stranded conductors; copper ferrules
recommended
See the XM Documentation and Configuration Utility CD
for Hazardous Locations installation drawings. The XM
Documentation and Configuration Utility CD is packaged
with the XM modules.
Power Requirements
Before installing your module, calculate the power requirements of all modules
interconnected via their side connectors. The total current draw through the
side connector cannot exceed 3 A. Refer to the specifications for the specific
modules for power requirements.
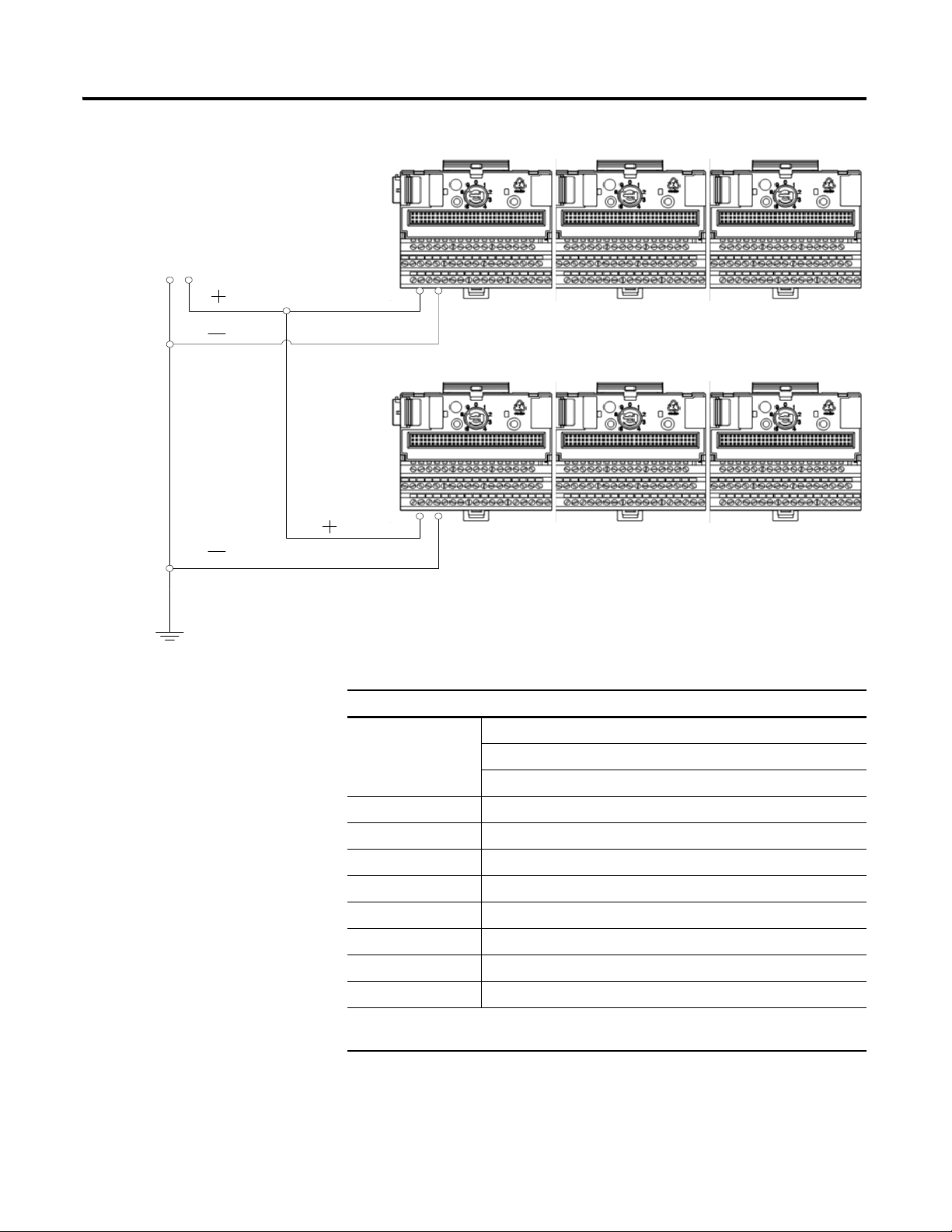
A separate power connection is necessary if the total
current draw of the interconnecting modules is greater than
3 A.
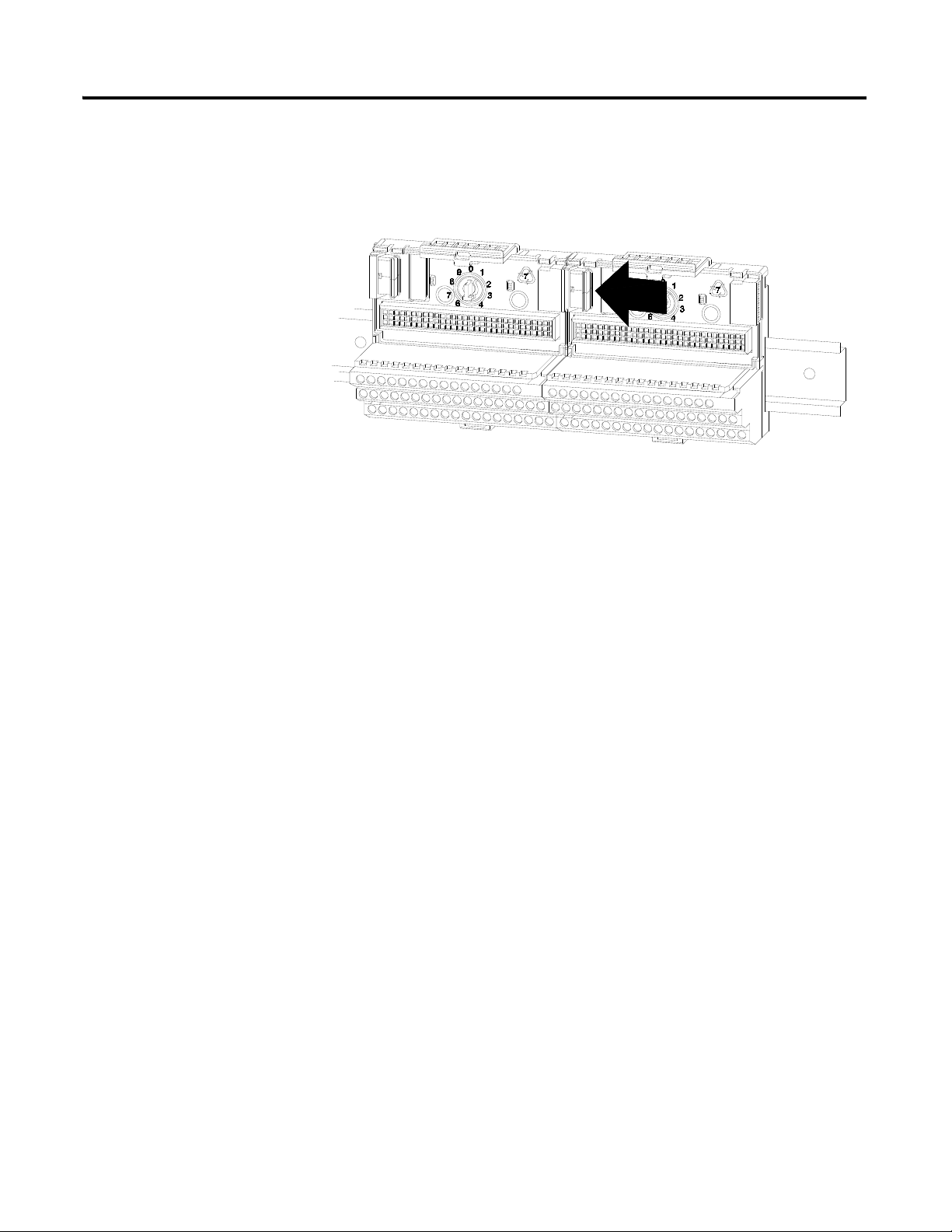
Figure 2.1 is an illustration of wiring modules using separate power
connections.
Publication GMSI10-UM013D-EN-P - May 2010
Page 17
Installing the XM-122 gSE Vibration Module 7
Any limited power
source that satisfies
the requirements
specified below
Figure 2.1 XM Modules with Separate Power Connections
Power Supply Requirements
XM Power Supply Requirements
Listed Class 2 rated supply, or
Protection
Fused* ITE Listed SELV supply, or
Fused* ITE Listed PELV supply
Output Voltage 24 Vdc ± 10%
Output Power 100 Watts Maximum (~4A @ 24 Vdc)
Static Regulation ± 2%
Dynamic Regulation ± 3%
Ripple < 100mVpp
Output Noise Per EN50081-1
Overshoot < 3% at turn-on, < 2% at turn-off
Hold-up Time As required (typically 50mS at full rated load)
* When a fused supply is used the fuse must be a 5 amp, listed, fast acting fuse such as
provided by Allen-Bradley part number 1440-5AFUSEKIT
Publication GMSI10-UM013D-EN-P - May 2010
Page 18
8 Installing the XM-122 gSE Vibration Module
IMPORTANT
See Application Technique "XM Power Supply Solutions",
publication ICM-AP005A-EN-E, for guidance in
architecting power supplies for XM systems.
Grounding Requirements
Use these grounding requirements to ensure safe electrical operating
circumstances, and to help avoid potential emi and ground noise that can cause
unfavorable operating conditions for your XM system.
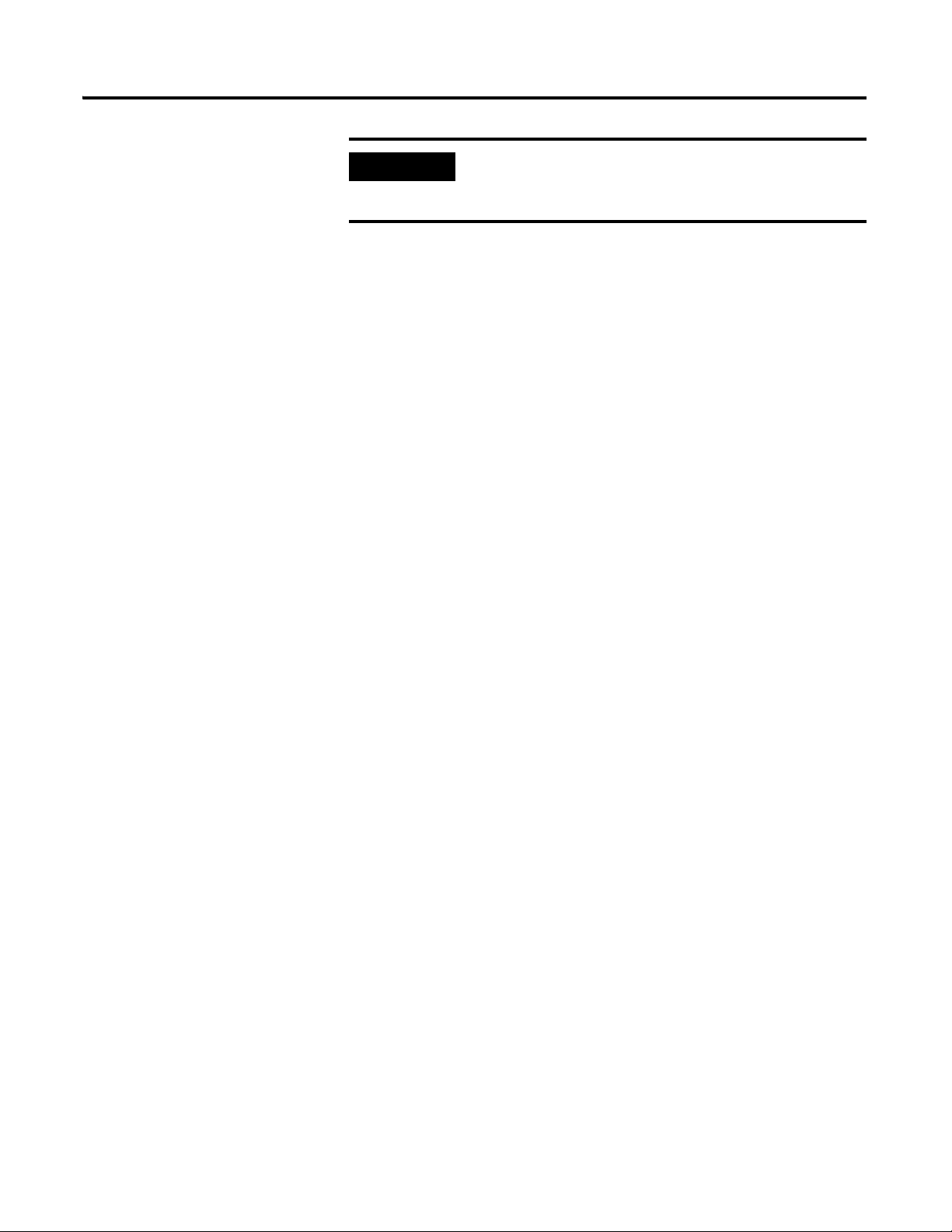
DIN Rail Grounding
The XM modules make a chassis ground connection through the DIN rail.
The DIN rail must be connected to a ground bus or grounding electrode
conductor using 8 AWG or 1 inch copper braid. See Figure 2.2.
Use zinc-plated, yellow-chromated steel DIN rail (Allen-Bradley part no.
199-DR1 or 199-DR4) or equivalent to assure proper grounding. Using other
DIN rail materials (e.g. aluminum, plastic, etc.), which can corrode, oxidize, or
are poor conductors can result in improper or intermittent platform
grounding.
Publication GMSI10-UM013D-EN-P - May 2010
Page 19
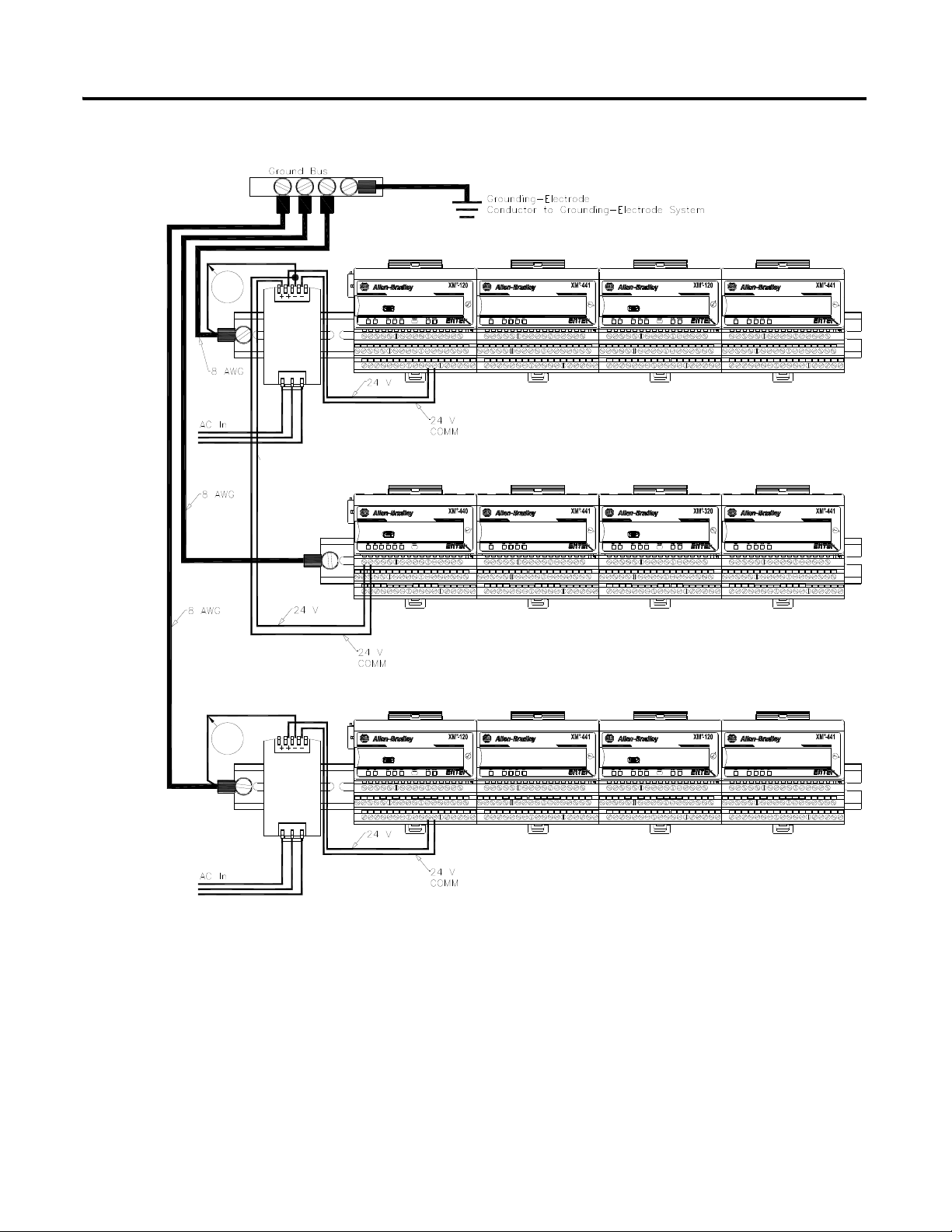
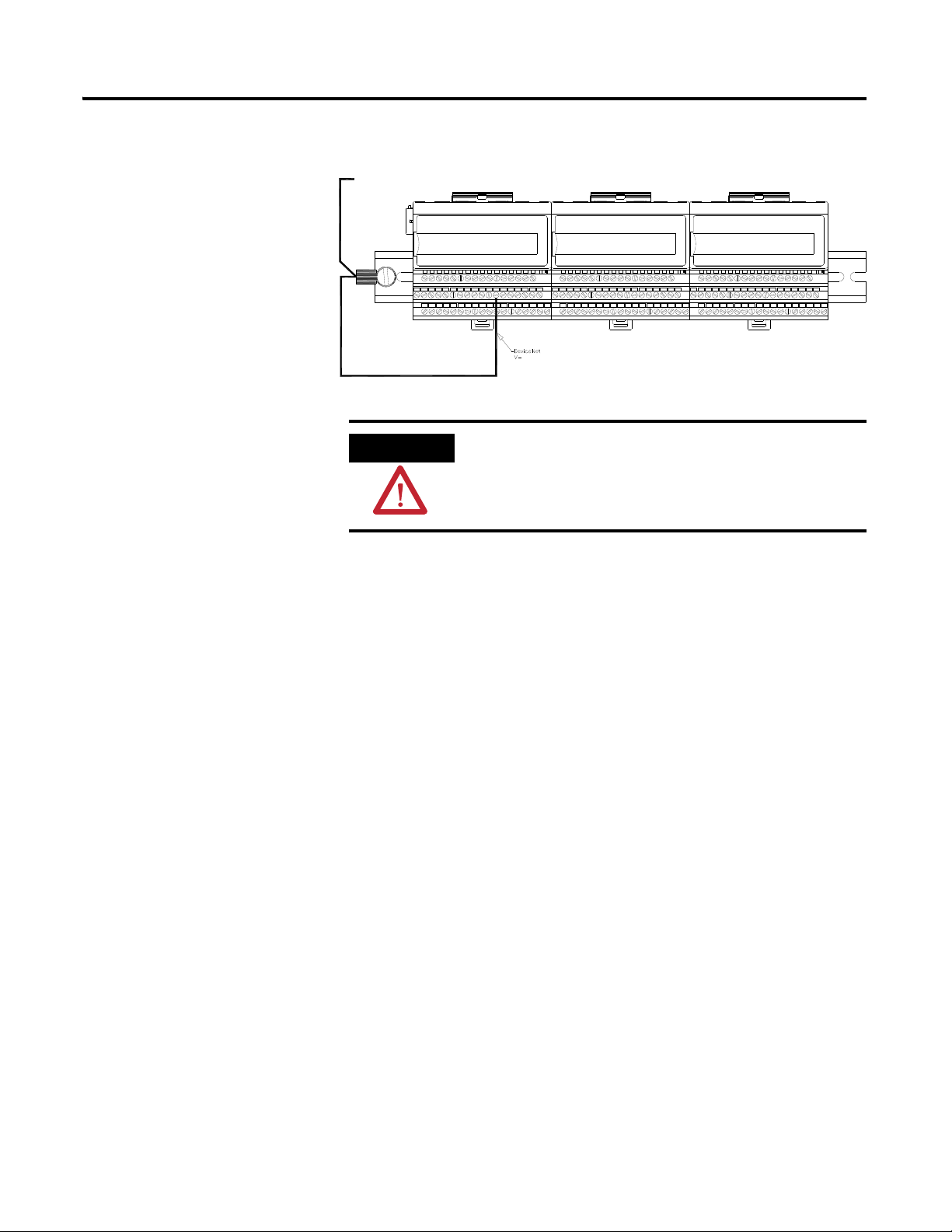
Figure 2.2 XM System DIN Rail Grounding
Power
Supply
DYNAMIC MEASUREMENT
1440-VST02-01RA
DYNAMIC MEASUREMENT
1440-VST02-01RA
POSITION
1440-TSP02-01RB
MASTER RELAY
1440-RMA00-04RC
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
Power
Supply
DYNAMIC MEASUREMENT
1440-VST02-01RA
DYNAMIC MEASUREMENT
1440-VST02-01RA
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
1
1
Installing the XM-122 gSE Vibration Module 9
1 Use 14 AWG wire.
The grounding wire can be connected to the DIN rail using a DIN Rail
Grounding Block (Figure 2.3).
Publication GMSI10-UM013D-EN-P - May 2010
Page 20
10 Installing the XM-122 gSE Vibration Module
Figure 2.3 DIN Rail Grounding Block
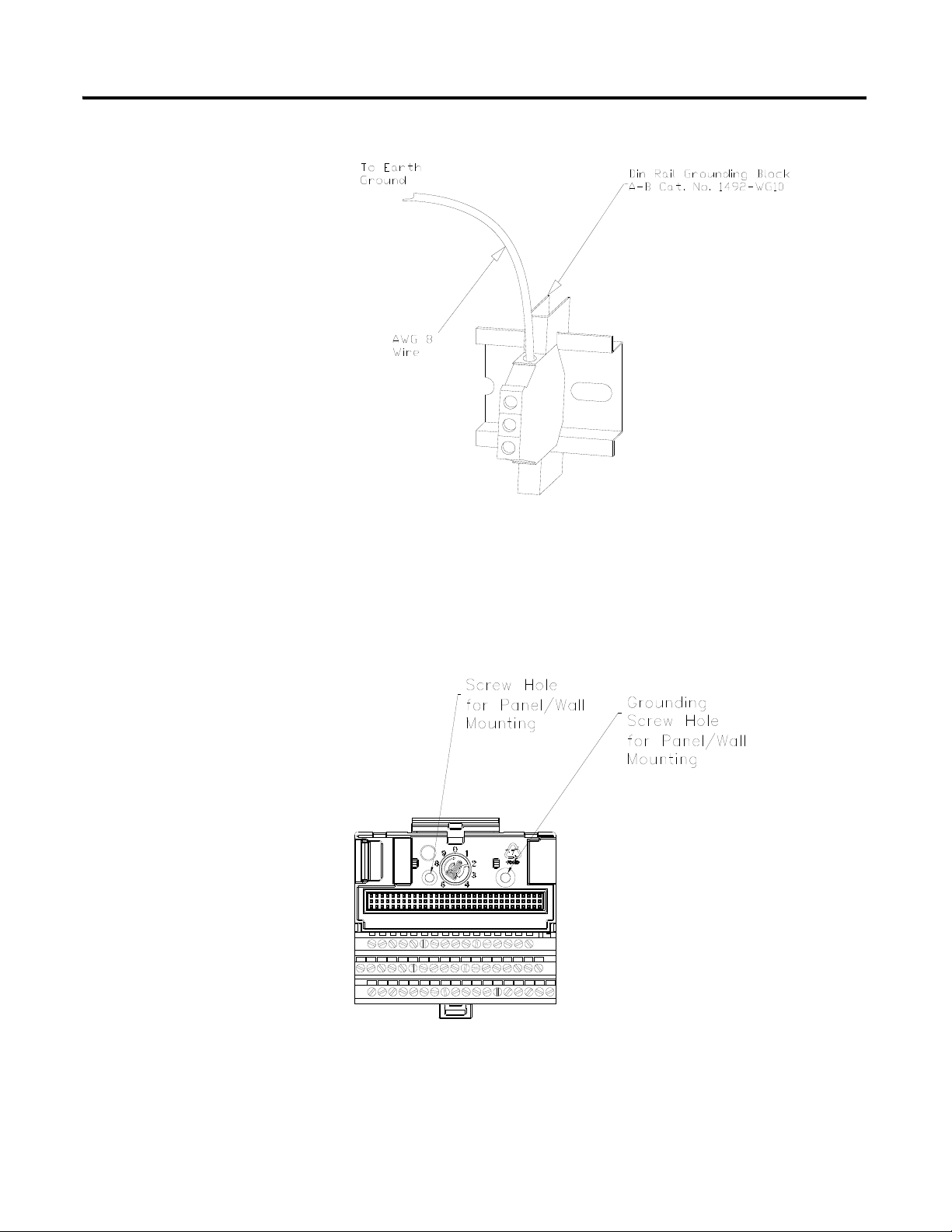
Panel/Wall Mount Grounding
The XM modules can also be mounted to a conductive mounting plate that is
grounded. See Figure 2.5. Use the grounding screw hole provided on the
terminal base to connect the mounting plate the Chassis terminals.
Figure 2.4 Grounding Screw on XM Terminal Base
Publication GMSI10-UM013D-EN-P - May 2010
Page 21
Figure 2.5 Panel/Wall Mount Grounding
Power
Supply
Power
Supply
1
1
Installing the XM-122 gSE Vibration Module 11
1 Use 14 AWG wire.
Publication GMSI10-UM013D-EN-P - May 2010
Page 22
12 Installing the XM-122 gSE Vibration Module
IMPORTANT
IMPORTANT
24 V Common Grounding
24 V power to the XM modules must be grounded. When two or more power
supplies power the XM system, ground the 24 V Commons at a single point,
such as the ground bus bar.
If it is not possible or practical to ground the -24Vdc
supply, then it is possible for the system to be installed and
operate ungrounded. However, if installed ungrounded
then the system must not be connected to a ground
through any other circuit unless that circuit is isolated
externally. Connecting a floating system to a non-isolated
ground could result in damage to the XM module(s)
and/or any connected device. Also, operating the system
without a ground may result in the system not performing
to the published specifications regards measurement
accuracy and communications speed, distance or reliability.
The 24 V Common and Signal Common terminals are
internally connected. They are isolated from the Chassis
terminals unless they are connected to ground as described
in this section. See Terminal Block Assignments on page 18
for more information.
Transducer Grounding
Make certain the transducers are electrically isolated from earth ground. Cable
shields must be grounded at one end of the cable, and the other end left
floating or not connected. It is recommended that where possible, the cable
shield be grounded at the XM terminal base (Chassis terminal) and not at the
transducer.
DeviceNet Grounding
The DeviceNet network is functionally isolated and must be referenced to
earth ground at a single point. XM modules do not require an external
DeviceNet power supply. Connect DeviceNet V- to earth ground at one of the
XM modules, as shown in Figure 2.6.
Publication GMSI10-UM013D-EN-P - May 2010
Page 23
Installing the XM-122 gSE Vibration Module 13
To
Ground
Bus
ATTENTION
Figure 2.6 Grounded DeviceNet V- at XM Module
Use of a separate DeviceNet power supply is not
permitted. See Application Technique "XM Power Supply
Solutions", publication ICM-AP005A-EN-E, for guidance
in using XM with other DeviceNet products.
Mounting the Terminal Base Unit
For more information on the DeviceNet installation, refer to the ODVA
Planning and Installation Manual - DeviceNet Cable System, which is available
on the ODVA web site (http://www.odva.org).
Switch Input Grounding
The Switch Input circuits are functionally isolated from other circuits. It is
recommended that the Switch RTN signal be grounded at a single point.
Connect the Switch RTN signal to the XM terminal base (Chassis terminal) or
directly to the DIN rail, or ground the signal at the switch or other equipment
that is wired to the switch.
The XM family includes several different terminal base units to serve all of the
XM modules. The XM-940 terminal base, Cat. No. 1440-TB-A, is the only
terminal base unit used with the XM-122 module.
Publication GMSI10-UM013D-EN-P - May 2010
Page 24
14 Installing the XM-122 gSE Vibration Module
ATTENTION
Position terminal base at a slight angle and hook over the top of the DIN rail.
The terminal base can be DIN rail or wall/panel mounted. Refer to the
specific method of mounting below.
The XM modules make a chassis ground connection
through the DIN rail. Use zinc plated, yellow chromated
steel DIN rail to assure proper grounding. Using other
DIN rail materials (e.g. aluminum, plastic, etc.), which can
corrode, oxidize or are poor conductors can result in
improper or intermittent platform grounding.
You can also mount the terminal base to a grounded
mounting plate. Refer to Panel/Wall Mount Grounding on
page 10.
DIN Rail Mounting
Use the following steps to mount the XM-940 terminal base unit on a DIN rail
(A-B pt no. 199-DR1 or 199-DR4).
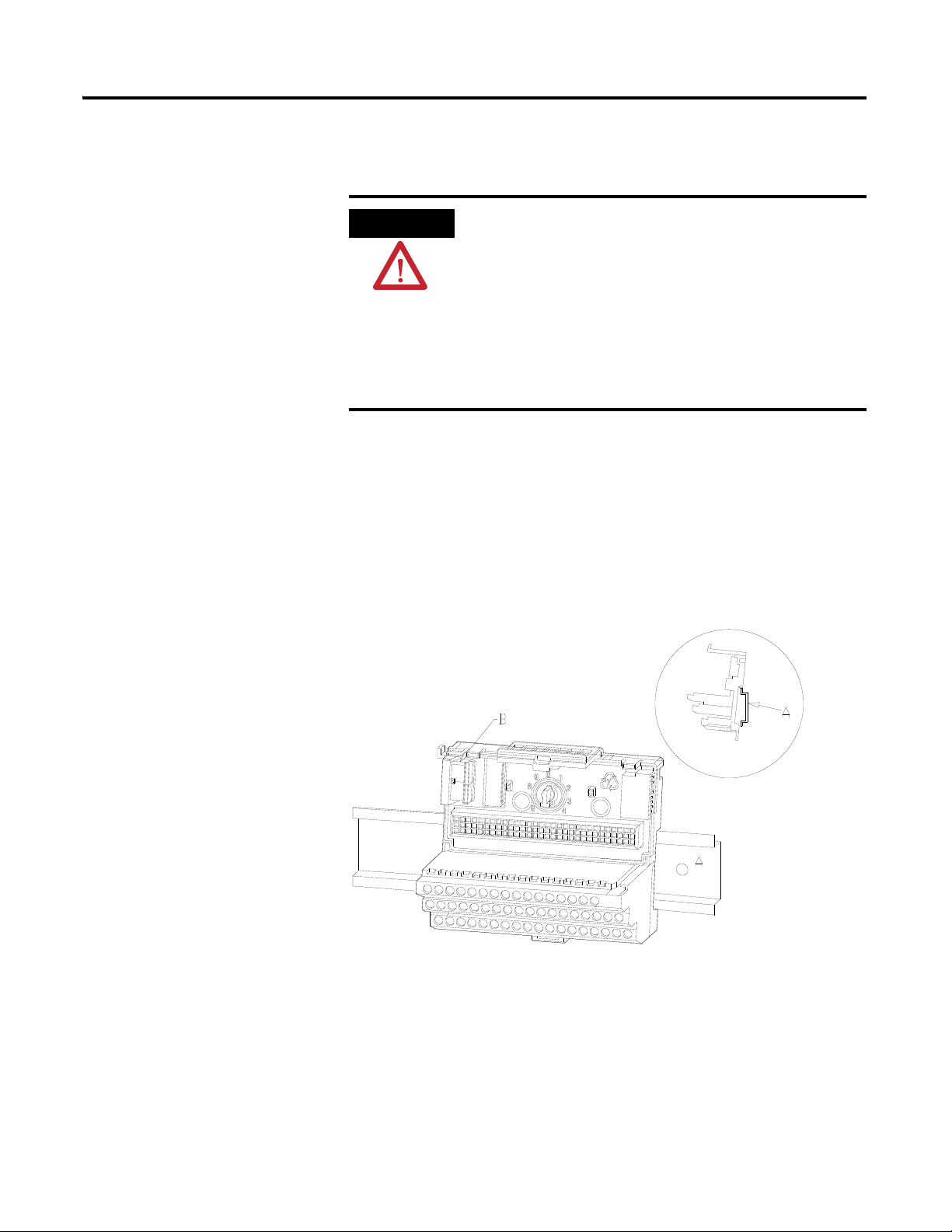
1. Position the terminal base on the 35 x 7.5 mm DIN rail (A).
2. Slide the terminal base unit over leaving room for the side
connector (B).
Publication GMSI10-UM013D-EN-P - May 2010
Page 25
Installing the XM-122 gSE Vibration Module 15
IMPORTANT
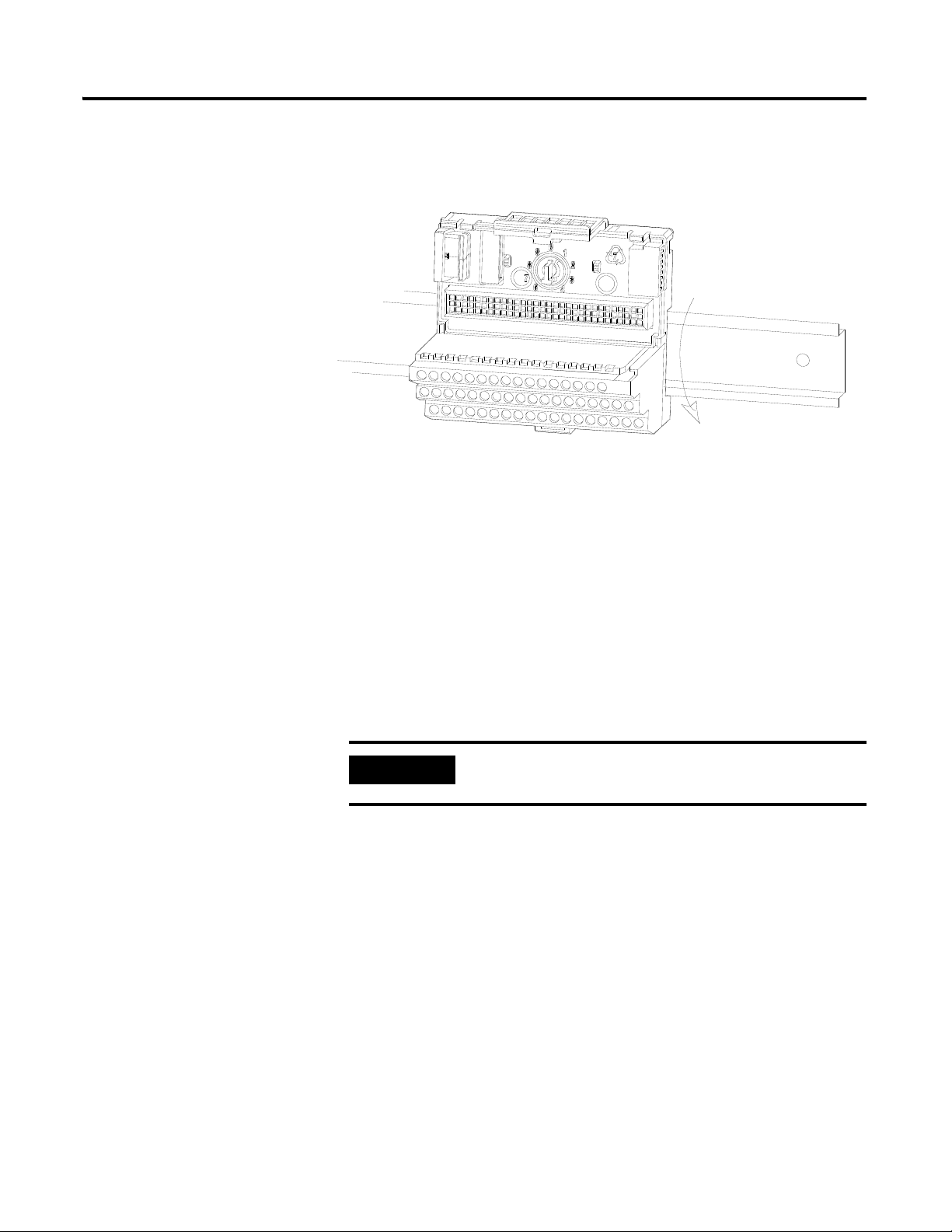
3. Rotate the terminal base onto the DIN rail with the top of the rail
hooked under the lip on the rear of the terminal base.
4. Press down on the terminal base unit to lock the terminal base on the
DIN rail. If the terminal base does not lock into place, use a screwdriver
or similar device to open the locking tab, press down on the terminal
base until flush with the DIN rail and release the locking tab to lock the
base in place.
Interconnecting Terminal Base Units
Follow the steps below to install another terminal base unit on the DIN rail.
Make certain you install the terminal base units in order of
left to right.
1. Position the terminal base on the 35 x 7.5 mm DIN rail (A).
2. Make certain the side connector (B) is fully retracted into the base unit.
3. Slide the terminal base unit over tight against the neighboring terminal
base. Make sure the hook on the terminal base slides under the edge of
the terminal base unit.
4. Press down on the terminal base unit to lock the terminal base on the
DIN rail. If the terminal base does not lock into place, use a screwdriver
or similar device to open the locking tab, press down on the terminal
base until flush with the DIN rail and release the locking tab to lock the
base in place.
Publication GMSI10-UM013D-EN-P - May 2010
Page 26
16 Installing the XM-122 gSE Vibration Module
5. Gently push the side connector into the side of the neighboring terminal
base to complete the backplane connection.
Panel/Wall Mounting
Installation on a wall or panel consists of:
• laying out the drilling points on the wall or panel
• drilling the pilot holes for the mounting screws
• installing the terminal base units and securing them to the wall or panel
Use the following steps to install the terminal base on a wall or panel.
Publication GMSI10-UM013D-EN-P - May 2010
Page 27
Installing the XM-122 gSE Vibration Module 17
Side Connector
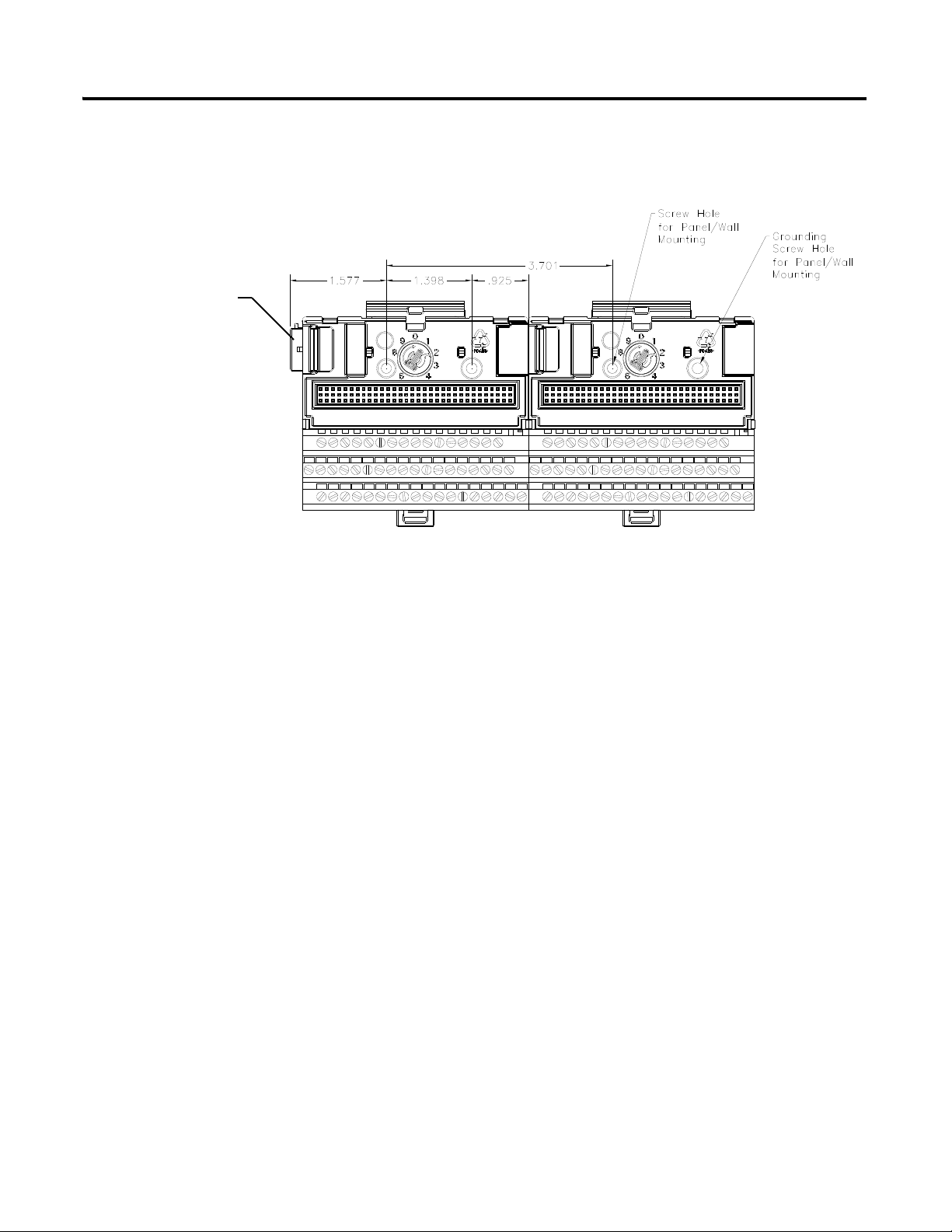
1. Lay out the required points on the wall/panel as shown in the drilling
dimension drawing below.
Connecting Wiring for Your Module
2. Drill the necessary holes for the #6 self-tapping mounting screws.
3. Secure the terminal base unit using two #6 self-tapping screws.
4. To install another terminal base unit, retract the side connector into the
base unit. Make sure it is fully retracted.
5. Position the terminal base unit up tight against the neighboring terminal
base. Make sure the hook on the terminal base slides under the edge of
the terminal base unit.
6. Gently push the side connector into the side of the neighboring terminal
base to complete the backplane connection.
7. Secure the terminal base to the wall with two #6 self-tapping screws.
Wiring to the module is made through the terminal base unit on which the
module mounts. The XM-122 is compatible only with the XM-940 terminal
base unit, Cat. No. 1440-TB-A.
Publication GMSI10-UM013D-EN-P - May 2010
Page 28
18 Installing the XM-122 gSE Vibration Module
ATTENTION
TIP
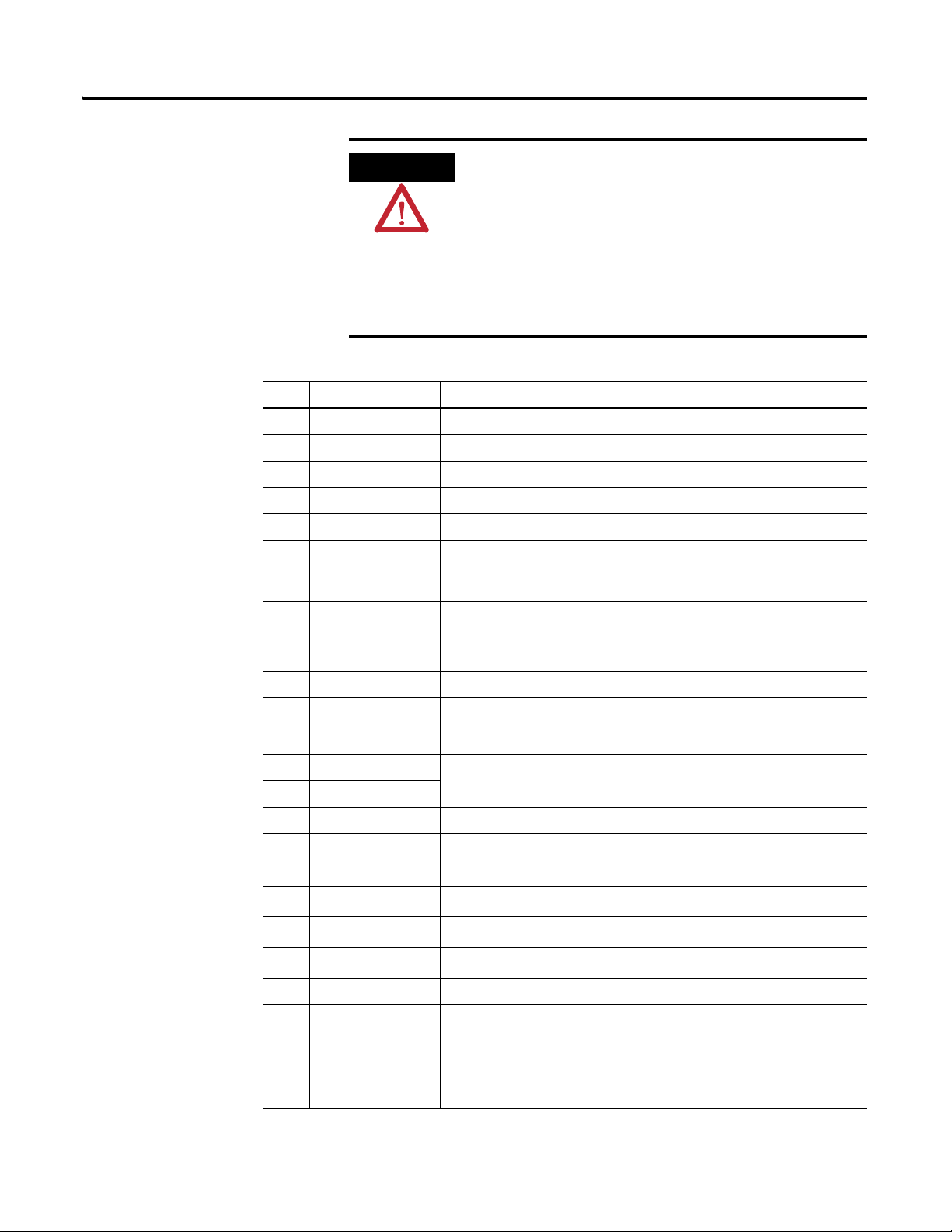
XM-940 (Cat. No. 1440-TB-A)
Revision number
of XM module
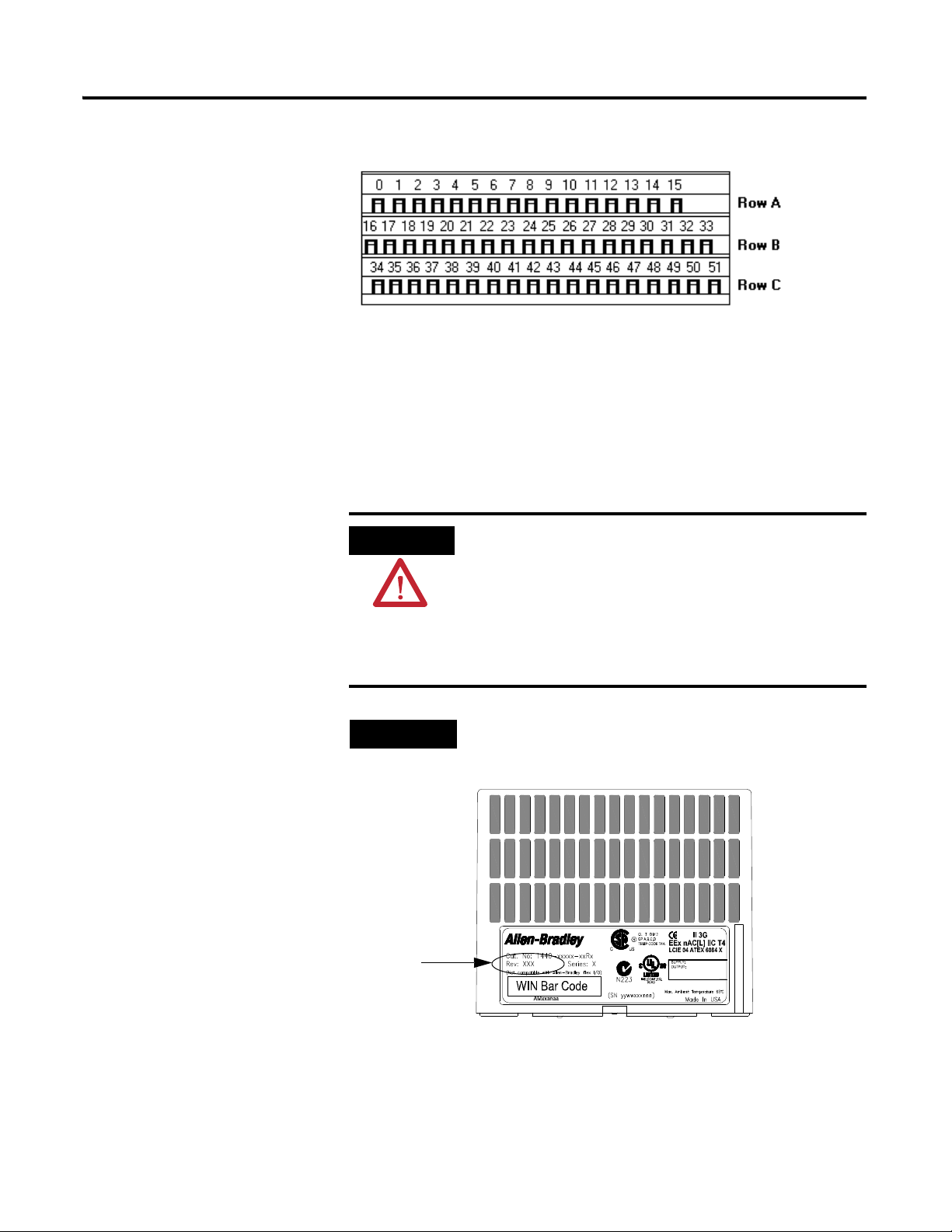
Figure 2.7 XM-940 Terminal Base Unit
Terminal Block Assignments
The terminal block assignments and descriptions for the XM-122 module are
shown below.
The terminal block assignments are different for different
XM modules. The following table applies only to the
XM-122 module revision D01 (and later). If you have an
earlier revision of the module, refer to Appendix D for its
terminal block assignments.
Refer to the installation instructions for the specific XM
module for its terminal assignments.
The XM module’s revision number is on the product label
(which is located on the front of the XM module, as shown
below).
Publication GMSI10-UM013D-EN-P - May 2010
Page 29
Installing the XM-122 gSE Vibration Module 19
WARNING
EXPLOSION HAZARD
Do not disconnect equipment unless power has been
removed or the area is known to be nonhazardous.
Do not disconnect connections to this equipment unless
power has been removed or the area is known to be
nonhazardous. Secure any external connections that mate
to this equipment by using screws, sliding latches, threaded
connectors, or other means provided with this product.
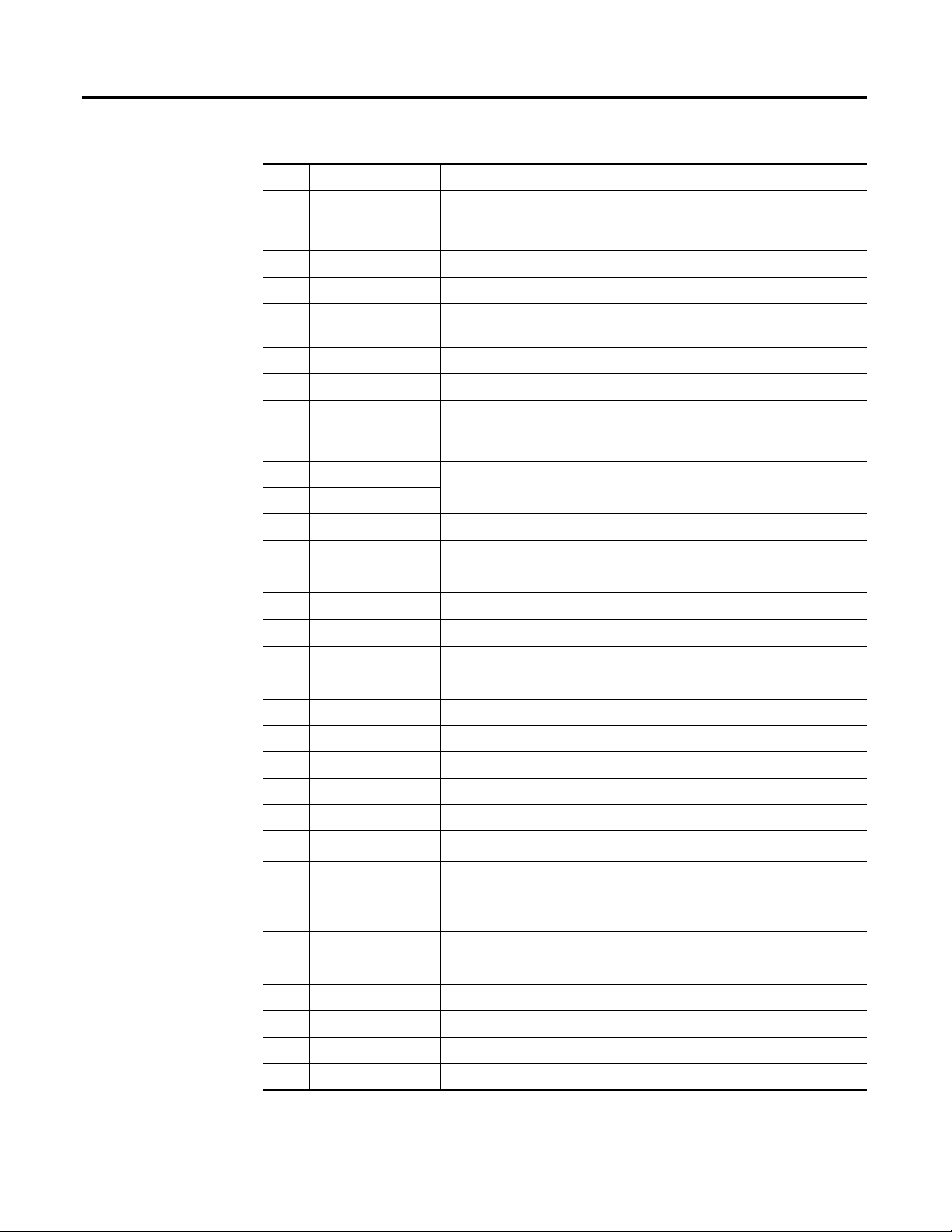
Terminal Block Assignments
No. Name Description
0 Xducer 1 (+) Vibration transducer 1 connection
1 Xducer 2 (+) Vibration transducer 2 connection
2 Buffer 1 (+) Vibration signal 1 buffered output
3 Buffer 2 (+) Vibration signal 2 buffered output
4 Tach/Signal In (+) Tachometer transducer/signal input, positive side
5 Buffer Power 1 IN Channel 1 buffer power input
Connect to terminal 6 for positive biased transducers or terminal 21 for
negative biased transducers
6 Positive Buffer Bias Provides positive (-5 V to +24 V) voltage compliance to buffered outputs
Connect to terminals 5 (CH 1) and 22 (CH 2) for positive bias transducers
7 TxD PC serial port, transmit data
8 RxD PC serial port, receive data
9
XRTN
1
Circuit return for TxD and RxD
10 Chassis Connection to DIN rail ground spring or panel mounting hole
11 4-20 mA 1 (+) 4-20 mA output
12 4-20 mA 1 (-)
300 ohm maximum load
13 Chassis Connection to DIN rail ground spring or panel mounting hole
14 Chassis Connection to DIN rail ground spring or panel mounting hole
15 Chassis Connection to DIN rail ground spring or panel mounting hole
16
17
18
Xducer 1 (-)
Xducer 2 (-)
Signal Common
1
1
Vibration transducer 1 connection
Vibration transducer 2 connection
1
Vibration buffered output return
19 TACH Buffer Tachometer transducer/signal output
20 Tachometer (-) Tachometer transducer/signal return, TACH Buffer return
21 Buffer/Xducer Pwr (-) Provides negative (-24 V to +9 V) voltage compliance to buffered outputs
Connect to terminals 5 (CH 1) and 22 (CH 2) for negative bias transducers
Transducer power supply output, negative side; used to power external
sensor (40 mA maximum load)
Publication GMSI10-UM013D-EN-P - May 2010
Page 30
20 Installing the XM-122 gSE Vibration Module
Terminal Block Assignments
No. Name Description
22 Buffer Power 2 IN Channel 2 buffer power input
23 CAN_High DeviceNet bus connection, high differential (white wire)
24 CAN_Low DeviceNet bus connection, low differential (blue wire)
25 +24V Out Internally connected to 24V In 1 (terminal 44)
26 DNet V (+) DeviceNet bus power input, positive side (red wire)
27 DNet V (-) DeviceNet bus power input, negative side (black wire)
28
24 V Common
29 4-20 mA 2 (+) 4-20 mA output
30 4-20 mA 2 (-)
31 Chassis Connection to DIN rail ground spring or panel mounting hole
32 Chassis Connection to DIN rail ground spring or panel mounting hole
Connect to terminal 6 for positive biased transducers or terminal 21 for
negative biased transducers
Used to daisy chain power if XM modules are not plugged into each other
1
Internally connected to 24 V Common (terminals 43 and 45)
Used to daisy chain power if XM modules are not plugged into each other
If power is not present on terminal 44, there is no power on this terminal
300 ohm maximum load
33 Chassis Connection to DIN rail ground spring or panel mounting hole
34 Chassis Connection to DIN rail ground spring or panel mounting hole
35 Chassis Connection to DIN rail ground spring or panel mounting hole
36 Chassis Connection to DIN rail ground spring or panel mounting hole
37 Chassis Connection to DIN rail ground spring or panel mounting hole
38 Chassis Connection to DIN rail ground spring or panel mounting hole
39 SetPtMult Switch input to activate Set Point Multiplication (active closed)
40 Switch RTN Switch return, shared between SetPtMult and Reset Relay
41 Reset Relay Switch input to reset internal relay (active closed)
42 Reserved
43
24 V Common
1
Internally DC-coupled to circuit ground
44 +24 V In Connection to primary external +24 V power supply, positive side
45
24 V Common
1
Connection to external +24 V power supply, negative side (internally
DC-coupled to circuit ground)
46 Relay N.C. 1 Relay Normally Closed contact 1
47 Relay Common 1 Relay Common contact 1
48 Relay N.O. 1 Relay Normally Open contact 1
49 Relay N.O. 2 Relay Normally Open contact 2
50 Relay Common 2 Relay Common contact 2
51 Relay N.C. 2 Relay Normally Closed contact 2
Publication GMSI10-UM013D-EN-P - May 2010
1 Terminals are internally connected and isolated from the Chassis terminals.
Page 31

Installing the XM-122 gSE Vibration Module 21
-
24V dc
Power
Supply
+
-
IMPORTANT
IMPORTANT
ATTENTION
Connecting the Power Supply
Power supplied to the module must be nominally 24 Vdc (±10%) and must be
a Class 2 rated circuit.
Wire the DC-input power supply to the terminal base unit as shown in Figure
2.8.
Figure 2.8 DC Input Power Supply Connections
A Class 2 circuit can be provided by use of an NEC Class 2
rated power supply, or by using a SELV or PELV rated
power supply with a 5 Amp current limiting fuse installed
before the XM module(s).
24Vdc needs to be wired to terminal 44 (+24 V In) to
provide power to the device and other XM modules linked
to the wired terminal base via the side connector.
The power connections are different for different XM
modules. Refer to the installation instructions for your
specific XM module for complete wiring information.
Publication GMSI10-UM013D-EN-P - May 2010
Page 32

22 Installing the XM-122 gSE Vibration Module
IMPORTANT
TIP
IMPORTANT
Connecting the Relays
The XM-122 has both Normally Open (NO) and Normally Closed (NC) relay
contacts. Normally Open relay contacts close when the control output is
energized. Normally Closed relay contacts open when the control output is
energized.
The alarms associated with the relay and whether the relay is normally
de-energized (non-failsafe) or normally energized (failsafe) depends on the
configuration of the module. Refer to Relay Parameters on page 78 for details.
Table shows the on-board relay connections for the module.
All XM relays are double pole. This means that each relay
has two contacts in which each contact operates
independently but identically. The following information
and illustrations show wiring solutions for both contacts;
although, in many applications it may be necessary to wire
only one contact.
The Expansion Relay module may be connected to the
module to provide additional relays. Refer the XM-441
Expansion Relay Module User Guide for wiring details.
The NC/NO terminal descriptions on page 20 correspond
to a de-energized (unpowered) relay.
When the relay is configured for non-failsafe operation, the
relay is normally de-energized.
When the relay is configured for failsafe operation, the
relay is normally energized, and the behavior of the NC and
NO terminals is inverted.
Publication GMSI10-UM013D-EN-P - May 2010
Page 33

Installing the XM-122 gSE Vibration Module 23
Table 2.1 Relay Connections for XM-122
Configured for
Failsafe Operation Relay 1 Terminals
Nonalarm Alarm Wire Contacts Contact 1 Contact 2
Closed Opened COM 47 50
NO 48 49
Opened Closed COM 47 50
NC 46 51
Configured for
Non-failsafe Operation Relay 1 Terminals
Nonalarm Alarm Wire Contacts Contact 1 Contact 2
Closed Opened COM 47 50
NC 46 51
Opened Closed COM 47 50
NO 48 49
Figures 2.9 and 2.10 illustrate the behavior of the NC and NO terminals when
the relay is wired for failsafe, alarm or nonalarm condition or non-failsafe,
alarm or nonalarm condition.
Figure 2.9 Relay Connection - Failsafe, Nonalarm Condition
Non-failsafe, Alarm Condition
Publication GMSI10-UM013D-EN-P - May 2010
Page 34

24 Installing the XM-122 gSE Vibration Module
Figure 2.10 Relay Connection - Failsafe, Alarm Condition
Non-failsafe, Nonalarm Condition
Alternate Relay Wiring
Figures 2.11 and 2.12 illustrate how to wire both ends of a single external
indicator to the XM terminal base for failsafe, nonalarm or alarm condition or
non-failsafe, nonalarm or alarm condition.
Figure 2.11 Relay Connection - Failsafe, Nonalarm Condition
Non-failsafe, Alarm Condition
Publication GMSI10-UM013D-EN-P - May 2010
Page 35

Installing the XM-122 gSE Vibration Module 25
IMPORTANT
Figure 2.12 Relay Connection - Failsafe, Alarm Condition
Non-failsafe, Nonalarm Condition
Connecting the Tachometer Signal
The XM-122 provides a single tachometer input signal. The signal processing
performed on the tachometer signal depends on the configuration of the
module. See page 71 for a description of the tachometer parameters.
If you are not using the tachometer input, set the Pulses
per Revolution parameter to zero (0). This will disable the
tachometer measurement and prevent the module from
indicating a tachometer fault (TACH indicator flashing
yellow). A tachometer fault occurs when no signal pulses
are received on the tachometer input signal for a relatively
long period.
Connecting a Magnetic Pickup Tachometer
Figure 2.13 shows the wiring of a magnetic pickup tachometer to the terminal
base unit.
Publication GMSI10-UM013D-EN-P - May 2010
Page 36

26 Installing the XM-122 gSE Vibration Module
Figure 2.13 Tachometer Signal Connection
Connecting a Hall Effect Tachometer Sensor
Figure 2.14 shows the wiring of a Hall Effect Tachometer Sensor, Cat. No.
44395, to the terminal base unit.
Figure 2.14 Hall Effect Tachometer Signal Connection
Publication GMSI10-UM013D-EN-P - May 2010
Page 37

Installing the XM-122 gSE Vibration Module 27
S
I
G
-
2
4
COM
Signal Common
Tach Input Signal
-24V DC
Shield
S hield Floating
Isolated Sensor Driver
20 21 31
4
18
Connecting a Non-Contact Sensor to the Tachometer Signal
Figure 2.15 shows the wiring of a non-contact sensor to the tachometer input
signal.
Figure 2.15 Non-Contact Sensor to Tachometer Signal Connection
Connecting the Buffered Outputs
The XM-122 provides buffered outputs of all transducer input signals. The
buffered output connections may be used to connect the module to portable
data collectors or other online systems.
Figure 2.16 shows the buffered output connections for the module.
Publication GMSI10-UM013D-EN-P - May 2010
Page 38

28 Installing the XM-122 gSE Vibration Module
IMPORTANT
Table 2.2 Configuring Buffered Output Input Range
Transducer Input Range Channel Connect Terminal To Terminal
Negative Bias -24 to +9 V 1 5 21
222 21
Positive Bias -5 to +24 V 1 5 6
222 6
Non-Bias -5 to +9 V 1 ---- ----
2 ---- ----
Figure 2.16 Buffered Output Connections
Applies only to XM-122 module revision D01 (and
later).
The voltage operating range of the buffered outputs must
be configured to coincide with the corresponding
transducer bias range. This operating range is configured by
placing a jumper from terminal 5 (channel 1) and terminal
22 (channel) to either terminal 6 (Positive Buffer Bias) or
terminal 21 (Buffer -), depending on the transducer. See
Table 2.2. The buffered output operating range is
configured independently per channel.
Publication GMSI10-UM013D-EN-P - May 2010
Page 39

Installing the XM-122 gSE Vibration Module 29
IMPORTANT
IMPORTANT
ATTENTION
IMPORTANT
IMPORTANT
Connecting the Transducer
The XM-122 can accept input from any Allen-Bradley non-contact eddy
current probe, a standard IEPE accelerometer, a velocity transducer, AC
voltage output, or a DC voltage output measurement device.
The XM-122 module can produce the gSE measurement
only with an IEPE accelerometer or an externally powered
sensor.
Connecting an IEPE Accelerometer
The following figures show the wiring of an IEPE accelerometer to the
terminal base unit.
Figures 2.17 and 2.18 show the wiring to the XM-122
module revision D01 (and later). If you have an earlier
revision of the module, refer to Appendix D for wiring
information.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
The internal transducer power supply is providing power to
the IEPE accelerometer. Make certain the IEPE Power
parameter is enabled. Refer to Channel Transducer
Parameters on page 58.
A jumper from terminal 5 to terminal 6 is required for
channel 1 buffered output. A jumper from terminal 22 to
terminal 6 is required for channel 2 buffered output. Refer
to Configuring Buffered Output Input Range on page 28.
Publication GMSI10-UM013D-EN-P - May 2010
Page 40

30 Installing the XM-122 gSE Vibration Module
TYPICAL WIRING FOR IEPE ACCELEROMETER
TO XM-122 VIBRATION MODULE CHANNEL 1
Shield
Pin A - Signal
Pin B - Common
Cable shield not
connected at this end
0
16
6
Channel 1 Input Signal
Signal Common
5
37
Jumpering terminal 5
to terminal 6 configures
CH 1 buffer for -5V to +24V
TYPICAL WIRING FOR IEPE ACCELEROMETER
TO XM-122 VIBRATION MODULE CHANNEL 2
Shield
Pin A - Signal
Pin B - Common
Cable shield not
connected at this end
1
17
6
Channel 1 Input Signal
Signal Common
38
Jumpering terminal 6 to
terminal 22 configures
CH 2 buffer for -5V to +24V
Channel 2 Input Signal
22
Figure 2.17 IEPE Accelerometer to Channel 1 Wiring
Figure 2.18 IEPE accelerometer to channel 2 wiring
Publication GMSI10-UM013D-EN-P - May 2010
Page 41

Installing the XM-122 gSE Vibration Module 31
IMPORTANT
ATTENTION
IMPORTANT
IMPORTANT
TYPICAL WIRING FOR NON-CONTACT SENSOR
TO XM-122 VIBRATION MODULE CHANNEL 1
COM
SIG
-24
Channel 1 Input Signal
-24V DC
0
16
Signal Common
21
5
Jumpering terminal 5 to
terminal 21 configures
CH 1 buffer for -24V to +9V
Isolated Sensor Driver
Shield
Shield
Floating
37
Connecting a Non-contact Sensor
The figures below show the wiring of a non-contact sensor to the terminal
base unit.
Figures 2.19 and 2.20 show the wiring to the XM-122
module revision D01 (and later). If you have an earlier
revision of the module, refer to Appendix D for wiring
information.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
The internal transducer power supply is providing power to
the non-contact sensor.
Figure 2.19 Non-contact Sensor to Channel 1 Wiring
A jumper from terminal 5 to terminal 21 is required for
channel 1 buffered output. A jumper from terminal 22 to
terminal 21 is required for channel 2 buffered output. Refer
to Configuring Buffered Output Input Range on page 28.
Publication GMSI10-UM013D-EN-P - May 2010
Page 42

32 Installing the XM-122 gSE Vibration Module
TYPICAL WIRING FOR NON-CONTACT SENSOR
TO XM-122 VIBRATION MODULE CHANNEL 2
COM
SIG
-24
Channel 2 Input Signal
-24V DC
1
17
22
Signal Common
21
Jumper ing terminal 21 to
terminal 22 configures
CH 2 buffer for -24V to +9V
Isolated Sensor Driver
Shield
Shield
Floating
38
ATTENTION
IMPORTANT
Figure 2.20 Non-contact Sensor to Channel 2 Wiring
Connecting a Passive Transducer
Figures 2.21 and 2.22 show the wiring of a passive transducer, such as a
velocity sensor, to the terminal base unit.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
The module does not power the sensor. It measures only
the input voltage.
Publication GMSI10-UM013D-EN-P - May 2010
Page 43

Installing the XM-122 gSE Vibration Module 33
TYPICAL WIRING FOR COIL-BASED VELOCITY SENSOR
TO XM-122 VIBRATION MODULE CHANNEL 1
Pin A - Common
Pin B - Signal
Cable shield not
connected at this end
Shield
0
16
Channel 1 Input Signal
Signal Common
37
TYPICAL WIRING FOR COIL-BASED VELOCITY SENSOR
TO XM-122 VIBRATION MODULE CHANNEL 2
Pin A - Common
Pin B - Signal
Cable shield not
connected at this end
Shield
1
17
Channel 2 Input Signal
Signal Common
38
Figure 2.21 Velocity Sensor to Channel 1 Wiring
Figure 2.22 Velocity Sensor to Channel 2 Wiring
Publication GMSI10-UM013D-EN-P - May 2010
Page 44

34 Installing the XM-122 gSE Vibration Module
IMPORTANT
ATTENTION
IMPORTANT
ATTENTION
Connecting a Powered Sensor
The following figures show the wiring of a powered sensor, such as the Model
580 Vibration Pickup, to the terminal base unit.
Figures 2.23 and 2.24 show the wiring to the XM-122
module revision D01 (and later). If you have an earlier
revision of the module, refer to Appendix D for wiring
information.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
A jumper from terminal 5 to terminal 6 is required for
channel 1 buffered output. A jumper from terminal 22 to
terminal 6 is required for channel 2 buffered output. Refer
to Configuring Buffered Output Input Range on page 28.
Figures 2.23 and 2.24 show the wiring of a Model 580
Vibration Pickup, which is a +24 V transducer. The +24 V
sensors powered from pin 25 do not utilize the redundant
power connection to the XM-122. So if primary 24 V
power is lost, the +24 V sensor will lose power regardless
of whether the XM-122 remains powered through the
redundant power terminals.
If redundant power is required then use a redundant power
supply (Allen-Bradley 1606-series is recommended).
Publication GMSI10-UM013D-EN-P - May 2010
Page 45

Installing the XM-122 gSE Vibration Module 35
0
16
37
+24V DC
Common
Signal
5
6
Channel 1 Input Signal
Signal Common
Shield
+24V DC
TYPICAL WIRING FOR MODEL 580 VIBRATION PICKUP
TO XM-122 VIBRATION MODULE CHANNEL 1
Cable shield not
connected at this end
25
Jumpering terminal 5
to terminal 6 configures
CH 1 buffer for -5V to +24V
1
17
38
+24V DC
Common
Signal
6
22
Channel 2 Input Signal
Signal Common
Shield
+24V DC
TYPICAL WIRING FOR MODEL 580 VIBRATION PICKUP
TO XM-122 VIBRATION MODULE CHANNEL 2
Cable shield not
connected at this end
Jumpering terminal 6
to terminal 22 configures
CH 2 buffer for -5V to +24V
25
Figure 2.23 Powered Sensor to Channel 1 Wiring
Figure 2.24 Powered Sensor to Channel 2 Wiring
Publication GMSI10-UM013D-EN-P - May 2010
Page 46

36 Installing the XM-122 gSE Vibration Module
ATTENTION
IMPORTANT
TYPICAL WIRING FOR PROCESS DC VOLTAGE SIGNAL
TO XM-122 VIBRATION MODULE CHANNEL 1
Cable shield not
connected at this end
Shield
0
16
Channel 1 Input Signal
Signal Common
37
Process DC
Source
Connecting a Process DC Voltage Signal
The following figures show the wiring from a process DC voltage signal to the
terminal base unit.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
The module does not power the sensor. It measures only
the input voltage.
Figure 2.25 DC Voltage Signal to Channel 1 Wiring
Publication GMSI10-UM013D-EN-P - May 2010
Page 47

Installing the XM-122 gSE Vibration Module 37
TYPICAL WIRING FOR PROCESS DC VOLTAGE SIGNAL
TO XM-122 VIBRATION MODULE CHANNEL 2
Cable shield not
connected at this end
Shield
1
17
Channel 2 Input Signal
Signal Common
38
Process DC
Source
ATTENTION
ATTENTION
IMPORTANT
Figure 2.26 DC Voltage Signal to Channel 2 Wiring
Connecting an IEPE Accelerometer and Non-Contact Sensor
Figure 2.27 shows the wiring of an IEPE accelerometer to channel 1 and the
wiring of a non-contact sensor to channel 2.
Figure 2.27 shows the wiring to the XM-122 module
revision D01 (and later). Earlier revisions of the module do
not support this wiring configuration. Refer to Appendix
D for information about wiring earlier revisions.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
Make certain the IEPE Power parameter for channel 1 is
enabled so power is provided to the accelerometer. Refer
to Channel Transducer Parameters on page 58.
Publication GMSI10-UM013D-EN-P - May 2010
Page 48

38 Installing the XM-122 gSE Vibration Module
IMPORTANT
IMPORTANT
TYPICAL WIRING FOR IEPE ACCELEROMETER AND
NON-CONTACT SENSOR TO XM-122 VIBRATION MODULE
Shield
Pin A - Signal
Pin B - Common
Cable shield not
connected at this end
0
16
22
6
21
Channel 1 Input Signal
Signal Common
5
37
S
I
G
-
2
4
COM
17
1
Signal Common
Channel 2 Input Signal
-24V DC
13
Shield
S hield Floating
Isolated Sensor Driver
*
*
*Note: Jumpering terminal 5 to terminal 6
configures CH 1 buffer (-5V to +24V)
Jumpering terminal 21 to terminal 22
configures CH 2 buffer (-24V to +9V)
The internal transducer power supply is providing power to
the non-contact sensor.
A jumper from terminal 5 to terminal 6 is required for
channel 1 buffered output. A jumper from terminal 22 to
terminal 21 is required for channel 2 buffered output. Refer
to Configuring Buffered Output Input Range on page 28.
Figure 2.27 IEPE Accelerometer and Non-Contact Sensor Wiring
Publication GMSI10-UM013D-EN-P - May 2010
Page 49

Installing the XM-122 gSE Vibration Module 39
ATTENTION
ATTENTION
IMPORTANT
IMPORTANT
IMPORTANT
Connecting Two Accelerometers and a Non-Contact Sensor
Figure 2.28 shows the wiring of two IEPE accelerometers and a non-contact
sensor to the terminal base. The IEPE accelerometers are wired to channel 1
and channel 2. The non-contact sensor is wired to the tachometer input signal.
Figure 2.28 shows the wiring to the XM-122 module
revision D01 (and later). If you have any earlier revision of
the module, refer to Appendix D for wiring information.
You may ground the cable shield to either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
Make certain the IEPE Power parameter is enabled for
both channel and channel so power is provided to the
accelerometers. Refer to Channel Transducer Parameters
on page 58.
Transducer DC bias is monitored on all signals.
A jumper from terminal 5 to terminal 6 is required for
channel 1 buffered output. A jumper from terminal 22 to
terminal 6 is required for channel 2 buffered output. Refer
to Configuring Buffered Output Input Range on page 28.
Publication GMSI10-UM013D-EN-P - May 2010
Page 50

40 Installing the XM-122 gSE Vibration Module
TYPICAL WIRING FOR TWO IEPE ACCELEROMETERS AND
NON-CONTACT SENSOR TO XM-122 VIBRATION MODULE
Shield
Pin A - Signal
Pin B - Common
Cable shield not
connected at this end
0
16
22
6
21
Channel 1 Input Signal
Signal Common
5
37
S
I
G
-
2
4
COM
17
1
Signal Common
Channel 2 Input Signal
-24V DC
Pin A - Signal
Pin B - Common
Cable shield not
connected at this end
Shield
36
20
4
Tach Input Signal
Signal Common
31
Shield
Shield
Floating
Isolated Sensor Driver
*
*
*
Note: Jumpering terminal 5 to terminal 6
configures CH 1 buffer (-5V to +24V)
Jumpering terminal 22 to terminal 6
configures CH 2 buffer (-5V to +24V)
18
IMPORTANT
ATTENTION
Figure 2.28 Two IEPE Accelerometers and a Non-Contact Sensor Wiring
Publication GMSI10-UM013D-EN-P - May 2010
Connecting a Velocity Sensor and Two Non-Contact Sensors
Figure 2.29 shows the wiring of a velocity sensor and two non-contact sensors
to the terminal base unit. The velocity sensor is wired to channel 1. The first
non-contact sensor is wired to channel 2, and the other non-contact sensor is
wired to the tachometer input signal.
Figure 2.29 shows the wiring to the XM-122 module
revision D01 (and later). If you have any earlier revision of
the module, refer to Appendix D for wiring information.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the terminal base
and not at the transducer. Any convenient Chassis terminal
may be used (see Terminal Block Assignments on page 18).
Page 51

Installing the XM-122 gSE Vibration Module 41
IMPORTANT
IMPORTANT
TYPICAL WIRING FOR COIL-BASED VELOCITY SENSOR AND TWO
NON-CONTACT SENSORS TO XM-122 VIBRATION MODULE
Pin A - Common
Pin B - Signal
Cable shield not
connected at this end
Shield
0
16
Channel 1 Input Signal
Signal Common
S
I
G
-
2
4
COM
S
I
G
-
2
4
COM
17
1
Signal Common
Channel 2 Input Signal
21
22
-24V DC
20
-24V DC
4
Signal Common
Tach Input Signal
36
13
31
Shield
Shield
*
* Note: Jumpering terminal 22 to
terminal 21 configures
CH 2 buffer (-24V to 9V)
18
Transducer DC bias is monitored on all signals.
A jumper from terminal 22 to terminal 21 is required for
channel 2 buffered output. Refer to Configuring Buffered
Output Input Range on page 28.
Figure 2.29 Velocity Sensor and Two Non-contact Sensor Wiring
Publication GMSI10-UM013D-EN-P - May 2010
Page 52

42 Installing the XM-122 gSE Vibration Module
TIP
TIP
ATTENTION
Connecting the Remote Relay Reset Signal
If you set the module relay to latching and the relay activates, the relay stays
activated even when the condition that caused the alarm has ended. The
remote relay reset signal enables you to reset your module relay remotely after
you have corrected the alarm condition. This includes latched relays in the
Expansion Relay module when it is attached to the XM-122.
If you set a module relay to latching, make sure that any
linked relays, such as relays in an XM-440 Master Relay
Module, are not configured as latching. When both relays
are set to latching, the relay in each module will have to be
independently reset when necessary.
You can discretely reset a relay using the serial or remote
configuration tool.
Wire the Remote Relay Reset Signal to the terminal base unit as shown in
Figure 2.30.
Figure 2.30 Remote Relay Reset Signal Connection
The Switch Input circuits are functionally isolated from
other circuits. It is recommended that the Switch RTN
signal be grounded at a signal point. Connect the Switch
RTN signal to the XM terminal base (Chassis terminal) or
directly to the DIN rail, or ground the signal at the switch
or other equipment that is wired to the switch.
Publication GMSI10-UM013D-EN-P - May 2010
Page 53

Installing the XM-122 gSE Vibration Module 43
ATTENTION
A single switch contact can also be shared by multiple XM modules wired in
parallel as shown in Figure 2.31.
The relay reset connections may be different for different
XM modules. Figure 2.31 applies only to the XM-122
module. Refer to the installation instructions for the
module for its terminal assignments.
Figure 2.31 Typical Multiple XM Modules Remote Relay Reset Signal Connection
Connecting the Setpoint Multiplication Switch
You can configure the module to multiply the alarm setpoints, or inhibit the
alarms during the start-up period. This can be used to avoid alarm conditions
that may occur during startup, for example, when the monitored machine
passes through a critical speed.
Wire the Setpoint Multiplication switch to the terminal base unit as shown in
Figure 2.32.
Publication GMSI10-UM013D-EN-P - May 2010
Page 54

44 Installing the XM-122 gSE Vibration Module
ATTENTION
Figure 2.32 Setpoint Multiplication Connection
The Switch Input circuits are functionally isolated from
other circuits. It is recommended that the Switch RTN
signal be grounded at a signal point. Connect the Switch
RTN signal to the XM terminal base (Chassis terminal) or
directly to the DIN rail, or ground the signal at the switch
or other equipment that is wired to the switch.
Connecting the 4-20 mA Outputs
The module includes an isolated 4-20 mA per channel output into a maximum
load of 300 ohms. The measurements that the 4-20 mA output tracks and the
signal levels that correspond to the 4 mA and 20 mA are configurable. Refer
to 4-20 mA Output Parameters on page 82 for details.
Wire the 4-20 mA outputs to the terminal base unit as shown in Figure 2.33.
Publication GMSI10-UM013D-EN-P - May 2010
Page 55

Figure 2.33 4-20 mA Output Connections
ATTENTION
-
The 4-20 mA outputs are functionally isolated from other
circuits. It is recommended that the outputs be grounded at
a single point. Connect the 4-20 mA (-) to the XM terminal
base (Chassis terminal) or directly to the DIN rail, or
ground the signal at the other equipment in the 4-20 mA
loop.
Installing the XM-122 gSE Vibration Module 45
PC Serial Port Connection
The XM-122 includes a serial port connection that allows you to connect a PC
to it and configure the module’s parameters. There are two methods of
connecting an external device to the module’s serial port.
• Ter mi n al B ase Unit - There are three terminals on the terminal base
unit you can use for the serial port connection. They are TxD, RxD, and
RTN (terminals 7, 8, and 9, respectively). If these three terminals are
wired to a DB-9 female connector, then a standard RS-232 serial cable
with 9-pin (DB-9) connectors can be used to connect the module to a
PC (no null modem is required).
The DB-9 connector should be wired to the terminal block as shown.
XM-122 Terminal Base Unit
(Cat. No. 1440-TB-A)
TX Terminal (terminal 7) ---------------------- Pin 2 (RD - receive data)
RX Terminal (terminal 8) ---------------------- Pin 3 (TD - transmit data)
RTN Terminal (terminal 9) --------------------- Pin 5 (SG - signal ground)
DB-9 Female Connector
Publication GMSI10-UM013D-EN-P - May 2010
Page 56

46 Installing the XM-122 gSE Vibration Module
gSE VIBRATION
1440-VSE02-01RA
mini-connector
WARNING
IMPORTANT
• Mini-Connector - The mini-connector is located on the top of the
module, as shown below.
Figure 2.34 Mini Connector
A special cable (Cat. No. 1440-SCDB9FXM2) is required for this
connection. The connector that inserts into the PC is a DB-9 female
connector, and the connector that inserts into the module is a USB
Mini-B male connector.
If you connect or disconnect the serial cable with power
applied to the module or the serial device on the other end
of the cable, an electrical arc can occur. This could cause an
explosion in hazardous location installations. Be sure that
power is removed or the area is nonhazardous before
proceeding.
If 24 V Common is not referenced to earth ground, we
recommend you use an RS-232 isolator, such as Phoenix
PSM-ME-RS232/RS232-P (Cat. No. 1440-ISO-232-24), to
protect both the XM module and the computer.
DeviceNet Connection
The XM-122 includes a DeviceNet™ connection that allows the module to
communicate with a Programmable Logic Controller (PLC), Distributed
Control System (DCS), or another XM module.
DeviceNet is an open, global, industry-standard communications network
designed to provide an interface through a single cable from a programmable
controller to a smart device such as the XM-122. As multiple XM modules are
interconnected, DeviceNet also serves as the communication bus and protocol
that efficiently transfers data between the XM modules.
Publication GMSI10-UM013D-EN-P - May 2010
Page 57

Installing the XM-122 gSE Vibration Module 47
IMPORTANT
ATTENTION
ATTENTION
ATTENTION
IMPORTANT
Connect the DeviceNet cable to the terminal base unit as shown.
Connect To Terminal
Red Wire DNet V+ 26 (Optional - see note)
White Wire CAN High 23
Bare Wire Shield (Chassis) 10
Blue Wire CAN Low 24
Black Wire DNet V- 27
The DeviceNet power circuit through the XM module
interconnect, which is rated at only 300 mA, is not intended
or designed to power DeviceNet loads. Doing so could
damage the module or terminal base.
To preclude this possibility, even unintentionally, it is
recommended that DeviceNet V+ be left unconnected.
You must ground the DeviceNet shield at only one
location. Connecting the DeviceNet shield to terminal 10
will ground the DeviceNet shield at the XM module. If you
intend to terminate the shield elsewhere, do not connect
the shield to terminal 10.
The DeviceNet network must also be referenced to earth at
only one location. Connect DNet V- to earth or chassis at
one of the XM modules.
The DNet V+ and DNet V- terminals are inputs to the XM
module. Do not attempt to pass DeviceNet power through
the XM terminal base to other non-XM equipment by
connecting to these terminals. Failure to comply may result
in damage to the XM terminal base and/or other
equipment.
Terminate the DeviceNet network and adhere to the
requirements and instructions in the ODVA Planning and
Installation Manual - DeviceNet Cable System, which is
available on the ODVA web site (http://www.odva.org).
The device is shipped from the factory with the network node address (MAC
ID) set to 63. The network node address is software settable. You can use the
Publication GMSI10-UM013D-EN-P - May 2010
Page 58

48 Installing the XM-122 gSE Vibration Module
IMPORTANT
ATTENTION
ATTENTION
WARNING
IMPORTANT
XM Serial Configuration Utility or RSNetWorx™ for DeviceNet™ (Version
3.0 or later) to set the network node address. Refer to the appropriate
documentation for details.
The baud rate for the XM-122 is set by way of "baud
detection" (Autobaud) at power-up.
Mounting the Module
The XM-122 mounts on the XM-940 terminal base unit, Cat. No. 1440-TB-A.
We recommend that you mount the module after you have connected the
wiring on the terminal base unit.
The XM-122 module is compatible only with the XM-940
terminal base unit. The keyswitch on the terminal base unit
should be at position 1 for the module.
Do not attempt to install XM-122 modules on other
terminal base units.
Do not change the position of the keyswitch after
wiring the terminal base.
This module is designed so you can remove and insert it
under power. However, when you remove or insert the
module with power applied, I/O attached to the module
can change states due to its input/output signal changing
conditions. Take special care when using this feature.
When you insert or remove the module while power is on,
an electrical arc can occur. This could cause an explosion in
hazardous location installations. Be sure that power is
removed or the area is nonhazardous before proceeding.
Publication GMSI10-UM013D-EN-P - May 2010
Install the overlay slide label to protect serial connector and
electronics when the serial port is not in use.
Page 59

Installing the XM-122 gSE Vibration Module 49
1. Make certain the keyswitch (A) on the terminal base unit (C) is at
position 1 as required for the XM-122.
Module Indicators
2. Make certain the side connector (B) is pushed all the way to the left. You
cannot install the module unless the connector is fully extended.
3. Make sure that the pins on the bottom of the module are straight so they
will align properly with the connector in the terminal base unit.
4. Position the module (D) with its alignment bar (E) aligned with the
groove (F) on the terminal base.
5. Press firmly and evenly to seat the module in the terminal base unit. The
module is seated when the latching mechanism (G) is locked into the
module.
6. Repeat the above steps to install the next module in its terminal base.
The XM-122 module has seven LED indicators, which include a module status
(MS) indicator, a network status (NS) indicator, a status indicator for each
channel (CH1, CH2, and TACH), an activation indicator for the Setpoint
Multiplier, and a status indicator for the Relay. The LED indicators are located
on top of the module.
Publication GMSI10-UM013D-EN-P - May 2010
Page 60

50 Installing the XM-122 gSE Vibration Module
gSE VIBRATION
1440-VSE02-01RA
Module Indicators
Figure 2.35 LED Indicators
The following tables describe the states of the LED status indicators.
Module Status (MS) Indicator
Color State Description
No color Off No power applied to the module.
Green Flashing Red Module performing power-up self test.
Flashing
Solid
Module operating in Program Mode
Module operating in Run Mode
Red Flashing • Application firmware is invalid or not loaded.
Download firmware to the module.
• Firmware download is currently in progress.
Solid An unrecoverable fault has occurred. The module may
need to be repaired or replaced.
1
.
2
.
1 Program Mode - Typically this occurs when the module configuration settings are being updated with the XM
Serial Configuration Utility. In Program Mode, the module does not perform its normal functions. The signal
processing/measurement process is stopped, and the status of the alarms is set to the disarm state to prevent
a false alert or danger status.
2 Run Mode - In Run Mode, the module collects measurement data and monitors each vibration measurement
device.
Publication GMSI10-UM013D-EN-P - May 2010
Page 61

Installing the XM-122 gSE Vibration Module 51
Network Status (NS) Indicator
Color State Description
No color Off Module is not online.
• Module is autobauding.
• No power applied to the module, look at Module
Status LED.
Green Flashing Module is online (DeviceNet) but no connections are
currently established.
Solid Module is online with connections currently
established.
Red Flashing One or more I/O connections are in the timed-out state.
Solid Failed communications (duplicate MAC ID or Bus-off).
1 Normal condition when the module is not a slave to an XM-440, PLC, or other master device.
1
Channel 1, Channel 2, and Tachometer Status Indicators
Color State Description
No color Off • Normal operation within alarm limits on the channel.
• No power applied to the module, look at Module
Status LED.
Yellow Solid An alert level alarm condition exists on the channel
(and no transducer fault, tachometer fault, or danger
level alarm condition exists).
Flashing
(Tach LED only)
Red Solid A danger level alarm condition exists on the channel
Flashing A transducer fault condition exists on the channel.
Tachometer fault (no transducer fault) condition exists
on the channel.
(and no transducer fault or tachometer fault condition
exists).
Setpoint Multiplier Indicator
Color State Description
Yellow Off Setpoint multiplier is not in effect.
Solid Setpoint multiplier is in effect.
Relay Indicator
Color State Description
Red Off On-board relay is not activated.
Solid On-board relay is activated.
Publication GMSI10-UM013D-EN-P - May 2010
Page 62

52 Installing the XM-122 gSE Vibration Module
gSE VIBRATION
1440-VSE02-01RA
Press the Reset
Switch to reset the
relays
Basic Operations
Powering Up the Module
The XM-122 performs a self-test at power-up. The self-test includes an LED
test and a device test. During the LED test, the indicators will be turned on
independently and in sequence for approximately 0.25 seconds.
The device test occurs after the LED test. The Module Status (MS) indicator is
used to indicate the status of the device self-test.
MS Indicator State Description
Flashing Red and Green Device self-test is in progress.
Solid Green or Flashing Green Device self-test completed successfully,
and the firmware is valid and running.
Flashing Red Device self-test completed, the hardware is
OK, but the firmware is invalid. Or, the
firmware download is in progress.
Solid Red Unrecoverable fault, hardware failure, or
Boot Loader program may be corrupted.
Refer to Module Indicators on page 49 for more information about the LED
indicators.
Manually Resetting Relays
The XM-122 has an external reset switch located on top of the module, as
shown in Figure 2.36.
Figure 2.36 Reset Switch
Publication GMSI10-UM013D-EN-P - May 2010
Page 63

Installing the XM-122 gSE Vibration Module 53
IMPORTANT
The switch can be used to reset all latched relays in the module. This includes
the relays in the Expansion Relay Module when it is attached to the XM-122.
The Reset switch resets the relays only if the input is no
longer in alarm or the condition that caused the alarm is no
longer present.
Publication GMSI10-UM013D-EN-P - May 2010
Page 64

54 Installing the XM-122 gSE Vibration Module
Publication GMSI10-UM013D-EN-P - May 2010
Page 65

Chapter
IMPORTANT
3
Configuration Parameters
This chapter provides a complete listing and description of the XM-122
parameters. The parameters can be viewed and edited using the XM Serial
Configuration Utility software and a personal computer. If the module is
installed on a DeviceNet network, configuring can also be performed using a
network configuration tool such as RSNetWorx (Version 3.0 or later). Refer to
your configuration tool documentation for instructions on configuring a
device.
For information about See page
XM-122 Measurement Modes 56
Channel Transducer Parameters 58
Channel Signal Processing Parameters 60
Measurement Parameters 63
gSE Parameters 69
Tachometer Parameters 71
Alarm Parameters 74
Relay Parameters 78
4-20 mA Output Parameters 82
Triggered Trend Parameters 83
SU/CD Trend Parameters 85
I/O Data Parameters 88
Data Parameters 89
Device Mode Parameters 93
The appearance and procedure to configure the parameters
The
may differ in different software.
55 Publication GMSI10-UM013D-EN-P - May 2010
Page 66

56 Configuration Parameters
IMPORTANT
TIP
XM-122 Measurement Modes
The XM-122 alternates between two measurement modes while it is actively
measuring the channel inputs: conventional mode and gSE mode.
The XM-122 operates in conventional vibration mode for a period of time
based on the configuration (table 3.A). During conventional mode, the module
measures the overall, spectrum, waveform, conventional bands, vectors, Not
1X, and sum harmonics values.
The module then reconfigures itself and transitions to gSE mode for a time
period based on the configuration (table 3.B). In gSE mode, the module
calculates gSE overall, gSE spectrum and gSE bands. The module then returns
to conventional mode, and the cycle repeats.
The most recent measured values are available via the 4-20mA outputs, the
XM Serial Configuration Utility, or the network configuration software.
During conventional and gSE mode, the module measures speed and
transducer bias.
If there is a tachometer fault and the conventional spectrum is configured to
be "synchronous," the conventional measurement will timeout and the gSE
measurement will take place. When the conventional mode is entered again,
the synchronous channel will re-attempt the spectrum/waveform collection.
The XM-122 can produce gSE measurements only with an
accelerometer. The gSE measurements are only available
for the channel when Eng. Units is set to "g."
Only when both Eng. Units are not set to "g" will the
XM-122 remain in conventional mode.
Publication GMSI10-UM013D-EN-P - May 2010
Page 67

Measurement Time
Conventional Mode
The conventional mode will produce measurements for a period of time
according to the following table:
Conventional Mode Time
Signal Detection Sampling Mode The greater of the two...
Configuration Parameters 57
RMS Asynchronous (Number of Averages) (Number of Lines) /
FMAX
RMS Synchronous (Number of Averages) (Number of Lines) /
(FMAX x 100)
True Peak Asynchronous (Number of Averages) (Number of Lines)/
FMAX
True Peak Synchronous (Number of Averages) (Number of Lines) /
(FMAX x 100)
gSE Mode
The gSE mode will produce measurements for a period of time according to
the following table:
gSE Mode Time
The greater of...
(Number of Averages) (Number of Lines) /
FMAX
4 seconds
5 x Overall Time Constant
(seconds)
5 x Overall Time Constant
(seconds)
1 second + 2 / High Pass
Corner Frequency
1 second + 2 / High Pass
Corner Frequency
Publication GMSI10-UM013D-EN-P - May 2010
Page 68

58 Configuration Parameters
TIP
XM Configuration
Utility
EDS File
Enable IEPE
Power
IEPE Power
XM Configuration
Utility
EDS File
Check = Enable Enabled
Clear = Disable Disabled
Channel Transducer
The channel transducer parameters define the characteristics of the
transducers you will be using with the module. Use the parameters to
Parameters
configure the transducer sensitivity, operating range, and power requirements.
There are two instances of the channel transducer parameters, one for each
channel.
The Channel LED will flash red when a transducer fault
condition exists on the channel even if you are not using
the channel. You can keep the Channel LED from flashing
red on unused channels by configuring the channel
transducer parameters as follows:
• Set the unused channel’s Fault High and Fault Low to
greater than zero and less than zero, respectively. For
example, set Fault High to +18 volts and set Fault Low
to -18 volts.
• Disable the unused channel’s transducer power by
clearing the Enable IEPE Power check box.
Transducer Parameters
Parameter Name Description Values/Comments
Channel Name (XM Serial
Configuration Utility only)
A descriptive name to help identify the channel in
the XM Serial Configuration Utility.
Controls whether to provide standard accelerometer
(IEPE) power to the transducer.
Maximum 18 characters
Sensitivity The sensitivity of the transducer in millivolts per
Publication GMSI10-UM013D-EN-P - May 2010
Refer to Connecting the Transducer on page 29 for
wiring requirements.
Eng. Unit.
The sensitivity value is included with
the transducer’s documentation or it
may be imprinted on the side of the
transducer.
Page 69

Configuration Parameters 59
Eng. Units
Options
Quantity of
Measure
g (gravity) Acceleration
ips (inch per
second)
mm/s
(millimeters per
second)
Velocity
mils (1/1000
inch)
um (micro
meter)
Displacement
Volts Voltage
Pa (pascals)
psi (pound-force
per square inch)
pressure
Time Constant
(seconds)
-3dB Frequency
(Hz)
Settling Time
(seconds)
1 0.159 2.2
2 0.080 4.4
3 0.053 6.6
4 0.040 8.8
50.03211
6 0.027 13.2
7 0.023 15.4
8 0.020 17.6
9 0.018 19.8
10 0.016 22
Transducer Parameters
Parameter Name Description Values/Comments
Eng. Units Defines the native units of the transducer. Your
choice controls the list of possible selections
available in the Output Data Units parameter. It
also affects other module parameters.
Important: The XM-122 can produce gSE
measurements only with an accelerometer. The gSE
measurements are only available for the channel
when Eng. Units is set to "g."
Fault Low The minimum, or most negative, expected DC bias
Fault High The maximum expected DC bias voltage from the
DC Bias Time Constant
voltage from the transducer.
transducer.
The time constant used for exponential averaging
(low pass filtering) of the transducer DC bias
measurement. The corner frequency for the low pass
filter is 1 / (2
π x DC Bias Time Constant). The
greater the value entered, the longer the settling
time of the measured value to a change in the input
signal. See example table below.
Volts
Note: A voltage reading outside this
range constitutes a transducer fault.
Seconds
Publication GMSI10-UM013D-EN-P - May 2010
Page 70

60 Configuration Parameters
Transducer Parameters
Parameter Name Description Values/Comments
Full Scale The maximum signal level expected to be processed
by the channel. This value is used to determine the
programmable gain settings across each stage of the
channel’s analog signal processing circuit.
Autoscale (XM Serial
Configuration Utility only)
Calculates a new Full Scale value based upon the
current input signal level.
Volt
Important: See Appendix E for further
guidance and recommended Full Scale
value settings.
Enter a safety factor value greater
than or equal to 1.0.
The safety factor is a number that will
be multiplied to the current signal
level to determine the new Full Scale
setting.
Channel Signal Processing Parameters
The channel signal processing parameters determine the signal processing that
will be performed on the input signals. Use these parameters to select the
output data units, the low cutoff frequency, full scale settings, and the
relationship of the signal to the tachometer signal for each channel.
In addition, the signal processing parameters affect the data units of the
measurement values, the sampling mode of the spectrum/waveform data, and
any spectral derived measurement. There are two instances of the signal
processing parameters, one for each channel.
Publication GMSI10-UM013D-EN-P - May 2010
Page 71

Configuration Parameters 61
Eng. Units
Output Data
Unit Options
gg
ips
mil
mm/sec
um
ips or mm/sec ips
mil
mm/sec
um
mils or um mils
um
Volt volt
Pa or psi Pa
psi
Channel Signal Processing Parameters
Parameter Name Description Values/Comments
Output Data Unit The data units of the measured values. The available options depend on the
Eng. Units selection. See page
58.
Very Low HPF Frequency (EDS
File only)
Low HPF Frequency (EDS File
only)
Medium HPF Frequency (EDS File
only)
High HPF Frequency (EDS File
only)
Very High HPF Frequency (EDS
File only)
High Pass Filter Sets the high pass filter to apply to the
Shows the corner frequency for the Very Low high
pass filter option.
Shows the corner frequency for the Low high pass
filter option.
Shows the corner frequency for the Medium high
pass filter option.
Shows the corner frequency for the High high pass
filter option.
Shows the corner frequency for the Very High high
pass filter option.
measurements. The high pass filter is useful in
removing low frequency signal components that
would dominate the signal. The high pass filter
attenuates all frequencies below a defined
frequency. It allows, or passes, frequencies above
the defined frequency.
Important: Select the Bypass option
when you want a more accurate
representation of dynamic signals at
low frequencies. This option reduces
the distortion of the waveform at low
frequencies and reduces attenuation
at lower frequencies.
Note: The lowest frequency high pass
filter is not available for integrated
measurements.
Publication GMSI10-UM013D-EN-P - May 2010
Page 72

62 Configuration Parameters
Asynchronous Sampling Synchronous Sampling
The waveform measurement is
time-based.
The waveform measurement is
position-based.
The spectrum measurement is
frequency-based.
The spectrum measurement is
order-based and the Number of
Lines must be evenly divisible by
FMAX (i.e. no remainder).
When averaging, spectrums are
averaged, not waveforms. This has
the affect of reducing noise in the
spectrum data.
When averaging, waveforms are
averaged and the spectrums are
calculated from averaged waveforms.
This has the affect of removing
non-synchronous frequencies from the
waveform and spectrum data.
The Band Minimum and Maximum
Frequency must be specified in Hz
(or CPM).
The Band Minimum and Maximum
Frequency can be specified in Hz
(CPM) or Orders.
The tachometer speed must meet the
following criteria, otherwise a
tachometer fault will be indicated.
10 Hz < Tach Speed x Gear Ratio* x
FMAX < 5000 Hz
*Gear Ratio
External Gear Teeth
Internal Gear Teeth
------------------------------------------------
=
Channel Signal Processing Parameters
Parameter Name Description Values/Comments
Sampling Mode Sets the sampling mode.
Options: Asynchronous
The sampling mode determines whether the signal is
synchronized with the tachometer signal and has
several effects on the resulting measurements.
Note: Synchronous sampling requires
a tachometer signal.
Synchronous
Internal Gear Teeth The number of teeth on the buried shaft gear. Note: These parameters apply only to
External Gear Teeth The number of teeth on the external shaft gear.
Publication GMSI10-UM013D-EN-P - May 2010
synchronous sampling.
Page 73

Configuration Parameters 63
High Pass
Filter
Overall Time
Constant
1 Hz 0.16
5 Hz or above 0.045
Measurement Parameters
Overall Measurement Parameters
There are two instances of the overall measurement parameters, one for each
channel. Use these parameters to configure the measurement type and the
filtering performed for each overall measurement.
Overall Measurement Parameters
Parameter Name Description Values/Comments
Signal Detection The measurement (or calculation) performed on the
input signal to produce the Overall Value. See Data
Parameters on page 89.
• RMS - The Overall Value is the root mean squared
(RMS) signal level of the input signal.
• Calculated Peak - The Overall Value is the
measured RMS value multiplied by the square root
of two (1.4142).
• Calculated Peak-to-Peak - The Overall Value is
the measured RMS value multiplied by two times
the square root of two (2.8284).
• True Peak - The Overall Value is the output of a
peak detector applied to the input signal.
• True Peak-to-Peak - The Overall Value is the
output of a peak-to-peak detector applied to the
input signal.
Options: RMS
Important: When changing the signal
detection, make certain to check the
Overall Time Constant value.
Calculated Peak
Calculated Peak-to-Peak
True Peak
True Peak-to-Peak
Overall Time Constant For RMS measurements, the Overall Time Constant
parameter sets the 3-DB bandwidth for the digital
filtering used to calculate the Overall Value. The
3-dB bandwidth is roughly equal to 1 / (2
Time Constant). The greater the Overall Time
Constant, the slower the response of the measured
Overall Value to change in the input signal.
For example, an Overall Time Constant of 0.1
seconds may be appropriate for monitoring the
Overall Value of an input signal with a fundamental
frequency of 10 Hz and above. Although, the
response to a step change in input will take
approximately 2.2 times the Overall Time Constant to
settle. Therefore, for an Overall Time Constant of 0.1
seconds, the settling time will be approximately 0.22
seconds.
For True Peak measurements, the Overall Time
Constant sets the decay rate of the peak detection
meter. The greater the Overall Time Constant, the
slower the Peak is decayed.
π x Overall
Enter a value greater than 0 (zero).
Recommended Value:
The recommended values are
appropriate for a typical 50/60 Hz
machine, and may need to be adjusted
depending on the application.
• For True Peak or True
Peak-to-Peak measurements, set
the Overall Time Constant to 1.5.
• For RMS, Calculated Peak, or
Calculated Peak-to-Peak
measurements, set the Overall Time
Constant to one of the
following:
Publication GMSI10-UM013D-EN-P - May 2010
Page 74

64 Configuration Parameters
IMPORTANT
XM Configuration
Utility
EDS File
Order of Sum
Harmonics
Sum
Harmonics
Start Order
Overall Measurement Parameters
Parameter Name Description Values/Comments
Overall Damping Factor This parameter is used in conjunction with the
Overall Time Constant to vary the characteristics
of the response of the digital filter used in
calculating the Overall Value.
An Overall Value for a measurement with a damping
factor near 1.0 (critical damping) will slowly rise or
fall for the full settling time specified by the Overall
Time Constant before reaching the final value. An
Overall Value for a measurement with a damping
factor near 0.707 will rise or fall quickly and may
"overshoot" (measure a value greater or less than the
final value) before reaching the final value for a
given input signal.
Overall Filter The filter to be applied to the overall measurement
to produce the Overall Value. See Data Parameters
on page 89.
Low Pass Filter Sets the frequency above which the input signal will
be significantly attenuated.
Enter a value from 0.707 to 1.0.
Options: None
Enter a value from 200 to 20,000 Hz.
Note: This value is used only when
the Overall Filter is set to "Low Pass
Filter." However, the value is ignored
when double integration is performed
on the signal (Eng. Units is set to "g"
and Output Data Units is set to
either "mils" or "µm").
Low Pass Filter
Sum Harmonics Measurement Parameters
Publication GMSI10-UM013D-EN-P - May 2010
Sum Harmonics Measurement Parameter
There are two instances of the sum harmonics parameter, one for each
channel. .
The sum harmonics measurement requires the tachometer
to be enabled (Pulses Per Revolution is set to 1 or more),
and a tachometer signal must be present.
Parameter Name Description Values/Comments
Sets the starting order for the Sum Harmonics
measurement. The amplitudes of all harmonics from
the specified harmonic through FMAX are included in
the sum.
Select a value from 1 to 5.
Note: This value should be less than
or equal to the FMAX in orders. The
sum harmonics start order is
automatically rounded down if this
value is above the FMAX.
Page 75

Configuration Parameters 65
TIP
Number of Lines
FMAX 100 200 400 800
4 √√√√
5 √√√√
8 √√√
10 √√√√
16 √√
20 √√√√
25 √√√√
32 √
40 √√√
Spectrum/Waveform Parameters
There are two instances of the spectrum/waveform parameters, one for each
channel. Use these parameters to set up the conventional spectrum and
waveform measurements.
Use the gSE Parameters to configure the gSE spectrum
measurements.
Spectrum/Waveform Parameters
Parameter Name Description Values/Comments
FMAX
Sets the maximum frequency or order for the
spectrum measurement.
Note: The Sampling Mode parameter determines
whether the measurement is frequency or order.
Number of Lines The number of lines or bins in the spectrum
measurement. This determines the frequency or
order resolution of the spectrum measurement.
Note: When Sampling Mode is set to
"Synchronous," the Number of Lines must be
evenly divisible by the FMAX value (no remainder).
See example table below. Note that the maximum
number of orders possible is equal to the Number of
Lines.
Note: You can enter any FMAX. The
module will automatically use the next
higher supported maximum frequency.
Supported maximum frequencies in
Hz:
Single integrated/ Double
Non-integrated
Integrated
10 to 5000 10 to 5000
6250 6250
7500 9375
8000 18750
9375
10000
12500
15000
18750
20000
Options: 100
200
400
800
Publication GMSI10-UM013D-EN-P - May 2010
Page 76

66 Configuration Parameters
XM Configuration
Utility
EDS File
Spectrum Option Spectrum
Spectrum/Waveform Parameters
Parameter Name Description Values/Comments
Period (XM Serial Configuration
Utility only)
Number of Points (XM Serial
Configuration Utility only)
Displays the total period of the waveform
measurement.
Displays the number of samples in the waveform
measurement.
Seconds (asynchronous sampling)
Cycles (synchronous sampling)
Spectral Lines
100 256
200 512
400 1024
800 2048
Waveform Samples
Window Type Type of window to be applied to the waveform
measurement prior to computing the spectrum.
• Hanning - Most often used in predictive
maintenance. Gives fair peak amplitude accuracy,
fair peak frequency accuracy. Useful for random
type data where energy is at all frequencies.
• Rectangular - Also known as Uniform. Gives poor
peak amplitude accuracy, good peak frequency
accuracy. Useful for impulsive or transient data.
• Hamming - Gives fair peak amplitude accuracy,
fair peak frequency accuracy. Similar to Hanning.
• Flat Top - Also called Sinusoidal window. Gives
good peak amplitude accuracy, poor peak
frequency accuracy for data with discrete
frequency components.
• Kaiser Bessel - Gives fair peak amplitude
accuracy, fair peak frequency accuracy.
Number of Averages Sets the number of individual data sets to be
incorporated into the average calculation.
Band Measurement Parameters
Options: Rectangular
Hamming
Hanning
Flat Top
Kaiser Bessel
1 = no averaging
Band Measurement Parameters
Parameter Name Description Values/Comments
Publication GMSI10-UM013D-EN-P - May 2010
There are eight instances of the band measurement parameters, four for each
channel. Use these parameters to configure the bandwidth for each band
measurement.
Sets the spectrum measurement to use when
calculating band values.
Options: Conventional Spectrum
gSE Spectrum
Note: The XM-122 can produce gSE
measurements only with an
accelerometer. The Eng. Units must
be set to "g" for the channel to use the
gSE Spectrum. See page 58.
Page 77

Configuration Parameters 67
TIP
Band Measurement Parameters
Parameter Name Description Values/Comments
Measurement The measurement (or calculation) performed to
produce the Band Value. See Data Parameters on
page 89.
• Band Overall - The Band Value is the square root
of the sum of the squares (RSS) of the amplitude
values for the bins that make up the band. If the
band includes all of the spectrum bins then the
Band Value is equivalent to the digital or RSS
overall value.
• Max Peak in Band - The Band Value is equal to
the maximum bin amplitude found within the band.
Options: Band Overall
Max Peak in Band
Minimum Frequency The spectrum bin with the least frequency to be
included in the band measurement.
Maximum Frequency The spectrum bin with the greatest frequency to be
included in the band measurement.
Frequency Units (EDS File only) Defines the units of the Minimum and Maximum
Frequency values.
The Frequency ranges for each band may overlap. For
example, Band 1 Minimum Frequency is 500 Hz and
Maximum Frequency is 1500 Hz, and Band 2 Minimum
Frequency is 1000 Hz and Maximum Frequency is
3000 Hz.
Options (XM Serial Configuration
Utility): Hz
CPM
Orders
Note: Order-based bands are
supported only when Spectrum
Option is set to "Conventional
Spectrum.'
Enter a value greater than or equal to
Minimum Frequency.
Note: This value must be less than or
equal to FMAX. For conventional
measurements, see page 65. For gSE
measurements, see page 70.
Options: Hz
Orders
Note: Order-based bands are
supported only when Spectrum
Option is set to "Conventional
Spectrum."
Publication GMSI10-UM013D-EN-P - May 2010
Page 78

68 Configuration Parameters
IMPORTANT
Speed
(Hz)
Max Frequency Represented
in Spectrum (Hz)
Band Min
(Hz)
Band Max
(Hz)
40 400 150 250
30 300 150 250
20 200 150 200
10 100 n/a n/a
For bands specified in Hz or CPM on an orders-based
spectrum, the Band Measurement value will be zero
when the Band Minimum Frequency and Maximum
Frequency fall completely outside of the frequencies
represented in the spectrum. If any of the band falls within
the spectrum, only that portion will contribute to the Band
value.
Example:
Minimum Frequency = 150 Hz
Maximum Frequency = 250 Hz
FMAX = 10 Orders
The following table shows the actual Band Minimum and
Maximum Frequencies given different input speeds for this
example. Note that when the speed is 10 Hz, the Band
Minimum and Maximum Frequencies fall outside the range
of the FMAX, so the Band value will be zero. When the
speed is 20 Hz, the band will be calculated from 150 to 200
Hz.
Publication GMSI10-UM013D-EN-P - May 2010
Page 79

Configuration Parameters 69
Time Constant
(milliseconds)
-3dB Frequency
(Hz)
Settling Time
(milliseconds)
5 31.8310 11
10 15.9155 22
20 7.9577 44
50 3.1831 110
100 1.5915 220
1200 0.1326 2640
IMPORTANT
Speed Measurement Parameter
Use the speed measurement parameter to configure the filtering performed on
the speed measurement.
Speed Measurement Parameter
Parameter Name Description Values/Comments
Exponential Averaging Time
Constant
Sets the 3-dB bandwidth for the digital filter used to
calculate the Speed Value and Acceleration
Measured Value. The 3-dB bandwidth is roughly
equal to 1 / (2
Constant). The greater the value entered, the longer
the response of the measured Speed Value and
Acceleration Measured Value to a change in the
input signal (less sensitive to noise in the signal).
See example table below.
π x Exponential Averaging Time
gSE Parameters
Use the gSE parameters to configure the gSE signal processing and gSE
spectrum measurements for channel 1 and channel 2. The gSE parameters are
configured independently of the (conventional) channel signal processing and
spectrum parameters. There are two instances of the gSE parameters, one for
each channel.
The XM-122 can produce gSE measurements only with an
accelerometer. The gSE
measurements are only available
for the channel when Eng. Units is set to "g." Refer
to Channel Transducer Parameters on page 58.
Publication GMSI10-UM013D-EN-P - May 2010
Page 80

70 Configuration Parameters
gSE Signal Processing Parameters
gSE Signal Processing Parameters
Parameter Name Description Values/Comments
gSE Full Scale The maximum signal level expected to be processed
by the channel for gSE measurements. This value is
used to determine the programmable gain settings
across each stage of the channel’s analog signal
processing circuit.
10 Volt
Important: Most gSE applications are
well matched to the default gSE Full
Scale setting of 10 volts. However, if
gSE levels in excess of 5 gSE are
observed or anticipated, then we
recommended you increase the Full
Scale setting to 50 Volts to better
match the dynamic range for the
application.
Output Data Unit (XM Serial
Configuration Utility only)
High Pass Filter Sets the high pass filter to apply to the gSE
The data units of the measured value. This value is always set to gSE.
Options: 200 Hz
measurement. The high pass filter is useful in
removing low frequency signal components that
would dominate the signal. The high pass filter
attenuates all frequencies below a defined
frequency. It allows, or passes, frequencies above
the defined frequency.
500 Hz
1000 Hz
2000 Hz
5000 Hz
gSE Spectrum Parameters
gSE Spectrum Parameters
Parameter Name Description Values/Comments
FMAX Sets the maximum frequency for the gSE spectrum
measurement.
Number of Lines The number of lines or bins in the gSE spectrum
measurement. This determines the frequency
resolution of the gSE spectrum measurement.
10 to 5000 Hz
Options: 100
200
400
800
Publication GMSI10-UM013D-EN-P - May 2010
Page 81

Configuration Parameters 71
gSE Spectrum Parameters
Parameter Name Description Values/Comments
Window Type Type of window to be applied to the measurement
prior to computing the gSE spectrum.
• Hanning - Most often used in predictive
maintenance. Gives fair peak amplitude accuracy,
fair peak frequency accuracy. Useful for random
type data where energy is at all frequencies.
• Rectangular - Also known as Uniform. Gives poor
peak amplitude accuracy, good peak frequency
accuracy. Useful for impulsive or transient data.
• Hamming - Gives fair peak amplitude accuracy,
fair peak frequency accuracy. Similar to Hanning.
• Flat Top - Also called Sinusoidal window. Gives
good peak amplitude accuracy, poor peak
frequency accuracy for data with discrete
frequency components.
• Kaiser Bessel - Gives fair peak amplitude
accuracy, fair peak frequency accuracy.
Options: Rectangular
Hamming
Hanning
Flat Top
Kaiser Bessel
Number of Averages Sets the number of individual data sets to be
incorporated into the average calculation for the gSE
spectrum.
Tachometer Parameters
The tachometer parameters define the characteristics of the tachometer and
1 = no averaging
determine the signal processing that will be performed on the tachometer
signal.
Tachometer Transducer Parameters
Tachometer Transducer Parameters
Parameter Name Description Values/Comments
Tachometer Name (XM Serial
Configuration Utility only)
A descriptive name to help identify the tachometer in
the XM Serial Configuration Utility software.
Maximum 18 characters
Publication GMSI10-UM013D-EN-P - May 2010
Page 82

72 Configuration Parameters
Time Constant
(seconds)
-3dB Frequency
(Hz)
Settling Time
(seconds)
1 0.159 2.2
2 0.080 4.4
3 0.053 6.6
4 0.040 8.8
50.03211
6 0.027 13.2
7 0.023 15.4
8 0.020 17.6
9 0.018 19.8
10 0.016 22
IMPORTANT
Tachometer Transducer Parameters
Parameter Name Description Values/Comments
Fault Low The minimum, or most negative, expected DC
Volts
voltage from the transducer.
Fault High The maximum expected DC voltage from the
transducer.
Note: A voltage reading outside this
range constitutes a transducer fault.
DC Bias Time Constant The time constant used for exponential averaging
(low pass filtering) of the transducer DC bias
measurement. The corner frequency for the low pass
filter is 1 / (2
π x DC Bias Time Constant). See
example table below.
Seconds
Tachometer Signal Processing Parameters
Parameter Name Description Values/Comments
Pulses Per Revolution The number of tachometer signal pulses per
Publication GMSI10-UM013D-EN-P - May 2010
Tachometer Signal Processing Parameters
The tachometer is required for synchronous sampling and
the speed measurement.
If you are not using the tachometer channel, set the Pulses
Per Revolution to zero. This will disable the tachometer
measurement, and prevent the module from indicating a
tachometer fault.
Enter zero if you are not using the
revolution of the shaft (number of gear teeth). This
setting is useful if a proximity probe located over a
gear or shaft with a multi-toothed speed sensing
surface is used to generate the input signal.
tachometer channel to disable the
tachometer measurement.
Page 83

Configuration Parameters 73
XM Configuration
Utility
EDS File
Auto Trigger Trigger
Mode
XM Configuration
Utility
EDS File
Check = Auto Mode Auto
Clear = Manual
Mode
Manual
Tachometer Signal Processing Parameters
Parameter Name Description Values/Comments
Fault Time-Out The number of seconds the module should wait after
Enter a value from 1 to 64 seconds.
the last valid tach pulse before it indicates a
tachometer fault.
Sets the trigger mode. In Auto Trigger mode, the
minimum signal amplitude for triggering is 2 volts
peak-to-peak and minimum frequency is 6 CPM (0.1
Hz).
In Manual Trigger mode, the value entered in
Trigger Threshold is used as the trigger point.
Minimum signal amplitude for triggering is 500
millivolts peak-to-peak and minimum frequency is 1
CPM.
Trigger Hysteresis The amount of hysteresis around the trigger
threshold. In Auto Trigger mode, the value entered is
a percentage of the peak-to-peak input signal. This
value can range from 0 to 50%.
In Manual Trigger mode, the value entered is a
voltage level. The hysteresis voltage is added to or
subtracted from the threshold voltage to determine
the hysteresis range. The minimum value is 0.12
volts.
Trigger Threshold
The signal level to be used as the trigger value when
in Manual Trigger mode.
Trigger Slope The input signal slope to be used as the trigger value
when in Manual Trigger mode.
% in Auto Trigger mode
Volt in Manual Trigger mode
Enter a value from +16 to -16 volts dc.
Note: This value is not used in Auto
Trigger mode.
Options: Positive
Negative
Note: This value is not used in Auto
Trigger mode.
Publication GMSI10-UM013D-EN-P - May 2010
Page 84

74 Configuration Parameters
XM Configuration
Utility
EDS File
Check to Enable Enabled
Clear to Disable Disabled
Alarm Parameters
The Alarm parameters control the operation of the alarms (alert and danger
level) and provide alarm status. The XM-122 provides 16 alarms. The alarms
are not restricted to a channel, but the maximum number of alarms that can be
assigned to any one measurement is eight. Use the parameters to configure
which measurement the alarm is associated with, as well as the behavior of the
alarm.
Alarm Parameters
Parameter Name Description Values/Comments
Number (1-16) (XM Serial
Configuration Utility only)
Name (XM Serial Configuration
Utility only)
Enable Enable/disable the selected alarm.
Measurement The type of measurement and the channel that is
Sets the alarm to be configured in the XM Serial
Configuration Utility. There are 16 alarms in the
XM-122. The alarms are not restricted to a channel.
A descriptive name to identify the alarm in the XM
Serial Configuration Utility.
Note: The Alarm Status is set to "Disarm" when the
alarm is disabled.
associated with the alarm.
Note: A maximum of eight alarms can be associated
with any one measurement.
Select a number from 1 to 16.
Maximum 18 characters
Options: Ch1 / Ch2 Overall
Ch1 / Ch2 Gap
Ch1 / Ch2 Band 1–4
Speed
Ch1 / Ch2 1X Mag
Ch1 / Ch2 2X Mag
Ch1 / Ch2 3X Mag
Ch1 / Ch2 Not 1X
Ch1 / Ch2 Sum Harmonics
Ch1 / Ch2 1X Phase
Ch1 / Ch2 2X Phase
Acceleration
Ch1 / Ch2 gSE Overall
Alarm Type (EDS File only) Controls whether the alarm is used as a magnitude
Publication GMSI10-UM013D-EN-P - May 2010
or vector (phase) alarm.
• Magnitude Alarms - The measurement value is
compared against the threshold values on a linear
scale.
• Vector (Phase) Alarms - The measurement value
is compared against the threshold values on a
circular scale of 0 to 360 degrees.
Options: Magnitude
Vector
Page 85

Configuration Parameters 75
Alarm Parameters
Parameter Name Description Values/Comments
Condition Controls when the alarm should trigger.
Options: Greater Than
Less Than
• Greater than - Triggers the alarm when the
measurement value is greater than or equal to the
Inside Range
Outside Range
Alert and Danger Threshold values.
The Danger Threshold value must be greater than
or equal to the Alert Threshold value for the trigger
to occur.
Note: This parameter is not applicable
for a vector (phase) alarm type or
phase measurement.
• Less than - Triggers the alarm when the
measurement value is less than or equal to the
Alert and Danger Threshold values.
The Danger Threshold value must be less than or
equal to the Alert Threshold value for the trigger to
occur.
• Inside range - Triggers the alarm when the
measurement value is equal to or inside the range
of the Alert and Danger Threshold values.
The Danger Threshold (High) value must be less
than or equal to the Alert Threshold (High) value
AND the Danger Threshold (Low) value must be
greater than or equal to the Alert Threshold (Low)
value for the trigger to occur.
• Outside range - Triggers the alarm when the
measurement value is equal to or outside the
range of the Alert and Danger Threshold values.
The Danger Threshold (High) value must be greater
than or equal to the Alert Threshold (High) value,
AND the Danger Threshold (Low) value must be
less than or equal to the Alert Threshold (Low)
value for the trigger to occur.
Publication GMSI10-UM013D-EN-P - May 2010
Page 86

76 Configuration Parameters
Alarm Parameters
Parameter Name Description Values/Comments
Alert Threshold (High)
The threshold value for the alert (alarm) condition.
Same measurement unit as Output
Data Unit selection for the specified
Note: This parameter is the greater threshold value
when Condition is set to "Inside Range" or "Outside
Range," the measurement is a phase measurement
channel except when
measurement/alarm type is phase
(vector).
(Configuration Utility), or the alarm type is a vector
alarm (EDS file).
Danger Threshold (High) The threshold value for the danger (shutdown)
condition.
Phase Measurements/Vector Alarm
Type Requirements:
• The Alert Low, Danger Low, Alert
High, and Danger High must define
Note: This parameter is the greater threshold value
when Condition is set to "Inside Range" or "Outside
Range," the measurement is a phase measurement
(Configuration Utility), or the alarm type is a vector
alarm.
Alert Threshold (Low) The lesser threshold value for the alert (alarm)
condition.
contiguous sections within the set
of possible phase values (0 to 360
degrees).
• If you were to plot the thresholds on
a clock face (illustration below) with
phase increasing in the clockwise
direction, then
• Alert Low must be clockwise
Note: This parameter is not used when Condition is
set to "Greater Than" or "Less Than."
Danger Threshold (Low) The lesser threshold value for the danger (shutdown)
condition.
from or equal to Danger Low.
• Alert High must be clockwise
from Alert Low.
• Danger High must be clockwise
from or equal to Alert High.
Note: This parameter is not used when Condition is
set to "Greater Than" or "Less Than."
Hysteresis The amount that the measured value must fall
(below the threshold) before the alarm condition is
cleared. For example, Alert Threshold = 120 and
Hysteresis = 2. The alarm (alert) activates when the
measured value is 120 and will not clear until the
measured value is 118.
Note: The Alert and Danger Thresholds use the
same hysteresis value.
Note: For the Outside Range condition, the
hysteresis value must be less than Alert Threshold
(High) – Alert Threshold (Low).
Startup Period The length of time that the Threshold Multiplier is
applied to the thresholds. The startup period begins
when the setpoint multiplier switch is reopened
(push button disengaged or toggle switch flipped to
off).
Publication GMSI10-UM013D-EN-P - May 2010
Same measurement unit as Output
Data Unit selection for the specified
channel.
Enter a value from 0 to 1092 minutes,
adjustable in increments of 0.1
minutes.
Page 87

Configuration Parameters 77
XM Configuration
Utility
EDS File
Check means inhibit
tachometer fault
Inhibit Tach
Fault
Clear means do not
inhibit tachometer
fault
Do not inhibit
XM Configuration
Utility
EDS File
Check to Enable Enabled
Clear to Disable Disabled
Alarm Parameters
Parameter Name Description Values/Comments
Threshold Multiplier The action to take when the setpoint multiplier
switch is closed (push button engaged or toggle
Enter a floating point value in the
range of 0 to 10.
switch flipped to on) and during the startup period
once the switch is reopened. The module applies the
multiplier to the alarm thresholds during this time to
Enter 0 (zero) to disabled the alarm
during the startup period.
avoid false alarms at resonance frequencies.
Note: The multiplication may have the opposite of
the intended effect under certain circumstances. For
example, if the Condition is set to "Less Than" and
the thresholds are positive, then multiplication of the
threshold values increases the likelihood of the
measured value being within the alarm range.
Therefore, you may want to set Threshold
Multiplier to zero to disable the alarm during the
startup period.
Inhibit Tachometer Fault Controls whether to inhibit the tachometer fault
during the startup period.
During startup, the machine may be turning very
slowly and cause the XM module to detect a
tachometer fault. The Alarm status will state that a
tachometer fault condition exists unless the
tachometer fault is inhibited.
Speed Range Enable Controls whether the selected alarm is enabled only
when the measured speed is within a machine speed
range. Enter the machine speed range in Speed
Range High and Speed Range Low.
Note: The tachometer must be
enabled (Pulses Per Revolution set
to 1 or more) and a tachometer signal
must be provided at the tachometer
input when Speed Range Enable is
enabled.
Note: You cannot enable the Speed
Range parameter when alarm
Measurement is set to "Speed." See
page 74.
Publication GMSI10-UM013D-EN-P - May 2010
Page 88

78 Configuration Parameters
IMPORTANT
Alarm Parameters
Parameter Name Description Values/Comments
Speed Range Low
The lesser threshold of the machine speed range.
This value must be less than the Speed Range
High value.
RPM
Speed Range High The greater threshold of the machine speed range.
Relay Parameters
This parameter is not used when Speed Range
Enabled is disabled.
This value must be greater than the Speed Range
Low value.
This parameter is not used when Speed Range
Enabled is disabled.
The Relay parameters control the operation of the on-board relay, as well as
the relays on the Expansion Relay (XM-441) module. Use these parameters to
configure which alarm(s) the relay is associated with, as well as the behavior of
the relay.
A relay can be defined, regardless of whether or not it is
physically present. A non-physical relay is a virtual relay.
When a relay (physical or virtual) activates, the module
sends a Change of State (COS) message to its master,
which acts on the condition as necessary. An XM-440
Master Relay Module can activate its own relays in response
to a relay (physical or virtual) activation at any of its slaves.
RPM
Relay Parameters
Parameter Name Description Options/Comments
Number (XM Serial Configuration
Utility only)
Publication GMSI10-UM013D-EN-P - May 2010
Sets the relay to be configured in the XM Serial
Configuration Utility.
Relay Number 1 is the on-board relay.
Numbers 2 through 5 are either relays
on the Expansion Relay module when
it’s connected to the module or virtual
relays.
Virtual relays are non-physical relays.
Use them when you want the effect of
the relay (monitor alarms, delay, and
change status) but do not need an
actual contact closure. For example, a
PLC or controller monitoring the relay
status.
Note: The Relay Installed parameter
indicates whether a relay is a virtual
relay or a physical relay on a module.
Page 89

Configuration Parameters 79
XM Configuration
Utility
EDS File
Check to Enable Enabled
Clear to Disable Disabled
XM Configuration
Utility
EDS File
Latching Latching
Option
XM Configuration
Utility
EDS File
Check means
latching (relay must
be explicitly reset)
Latching
Clear means
non-latching (relay
is reset once the
alarm condition has
passed)
Nonlatching
XM Configuration
Utility
EDS File
Activation Logic Logic
Relay Parameters
Parameter Name Description Options/Comments
Name (XM Serial Configuration
Utility only)
A descriptive name to help identify the relay in the
XM Serial Configuration Utility.
Maximum 18 characters
Enable Enable/disable the selected relay.
Note: The Relay Current Status is set to "Not
Activated" when the relay is disabled. See page 89.
Controls whether the relay must be explicitly reset
after the alarm subsides.
Activation Delay Enter the length of time for which the Activation
Logic must be true before the relay is activated. This
reduces nuisance alarms caused by external noise
and/or transient vibration events.
Important: True Peak and True Peak-to-Peak signal
detection is more sensitive to transients and noise.
To avoid false relay trips, it is strongly recommended
that the Activation Delay value is greater than the
Overall Time Constant value when Signal
Detection is set to "True Peak" or "True
Peak-to-Peak." Refer to Overall Measurement
Parameters on page 63.
Sets the relay activation logic.
• A or B - Relay is activated when either Alarm A or
Alarm B meets or exceeds the selected Alarm
Status condition(s).
• A and B - Relay is activated when both Alarm A
and Alarm B meet or exceed the selected Alarm
Status condition(s).
• A Only - Relay is activated when Alarm A meets
or exceeds the selected Alarm Status
condition(s).
Enter a value from 0 to 25.5 seconds,
adjustable in increments of 0.1
seconds.
Default is 1 second
Options: A only
A or B
A and B
Publication GMSI10-UM013D-EN-P - May 2010
Page 90

80 Configuration Parameters
XM Configuration
Utility
EDS File
Alarm A/B Alarm
Identifier
A/B
XM Configuration
Utility
EDS File
Alarm Status to
Activate On
Alarm Levels
XM Configuration
Utility
EDS File
Check = Physical
Relay
Installed =
Physical Relay
Clear = Virtual Relay Not Installed =
Virtual Relay
Relay Parameters
Parameter Name Description Options/Comments
Sets the alarm(s) that the relay will monitor. The
Alarm No. 1 to 16
alarm must be from the same device as the relay.
When the Activation Logic is set to "A and B" or "A
or B," you can select an alarm in both Alarm A and
Note: You can only select an alarm
that is enabled.
Alarm B. The system monitors both alarms. When
the Activation Logic is set to "A Only," you can
select an alarm only in Alarm A.
Sets the alarm conditions that will cause the relay to
activate. You can select more than one.
• Normal - The current measurement is not within
excess of any alarm thresholds.
• Alert - The current measurement is in excess of
the alert level threshold(s) but not in excess of the
danger level threshold(s).
• Danger - The current measurement is in excess of
the danger level threshold(s).
• Disarm-The alarm is disabled or the device is in
Program mode.
• Xdcr Fault - A transducer fault is detected on the
associated transducer.
• Module Fault - Hardware or firmware failure, or
an error has been detected and is preventing
proper operation of the device.
• Ta ch o Fault - A required tachometer signal has
not been detected. Note that there is no
transducer fault either.
Relay Installed Indicates whether the relay is a physical relay on a
module or a virtual relay. If the relay is a physical
relay, then you can set the Failsafe parameter.
If the relay is a virtual relay, the Failsafe parameter
is not used or it is disabled.
Options: Normal
Danger
Xdcr Fault
Tacho Fault
Alert
Disarm
Module Fault
Check to enable.
Clear to disable.
Publication GMSI10-UM013D-EN-P - May 2010
Page 91

Configuration Parameters 81
XM Configuration
Utility
EDS File
Failsafe Relay Failsafe
Option
XM Configuration
Utility
EDS File
Check means
failsafe
Failsafe
Clear means
non-failsafe
Nonfailsafe
Relay Parameters
Parameter Name Description Options/Comments
Determines whether the relay is failsafe or
non-failsafe.
Failsafe operation means that when in alarm, the
relay contacts are in their "normal," de-energized, or
"shelf-state" positions. In other words, normally
closed relays are closed in alarm, and normally open
relays are open in alarm. With failsafe operation, a
power failure equals an alarm.
The following are true of a relay in failsafe
operation:
• The relay is energized when power is applied to
the module.
• The relay in a nonalarmed condition has power
applied to the coil.
• In alarm condition, power is removed from the
relay coil, causing the relay to change state.
For non-failsafe operation, the following are true:
• Under nonalarm conditions, the relay closes the
circuit between the common and the N.C.
(normally closed) terminals.
• Under alarm conditions, the relay changes state to
close the circuit between the common and the
N.O. (normally open) terminals.
For failsafe operation, the following are true:
• Under nonalarm (with power applied to the unit)
conditions, the relay closes the circuit between the
common and the N.O. terminals.
• Under alarm or loss-of-power conditions, the relay
changes state to close the circuit between the
common and the N.C. terminals.
Publication GMSI10-UM013D-EN-P - May 2010
Page 92

82 Configuration Parameters
XM Configuration
Utility
EDS File
Check to enable Enabled
Clear to disable Disabled
IMPORTANT
4-20 mA Output Parameters
The 4-20 mA output parameters define the characteristics of the two 4-20 mA
output signals. The parameters are the same for each output.
4-20 mA Parameters
Parameter Name Description Options/Comments
Enable Enables/disables the 4-20 mA output.
Measurement Sets the type of measurement and the channel that
the 4-20 mA output signal will track.
Min Range The measured value associated with the 4 mA. Same measurement unit as Output
Max Range The measured value associated with the 20 mA.
Options: Ch1 / Ch2 Overall
Ch1 / Ch2 Gap
Ch1 / Ch2 Band 1–4
Speed
Ch1 / Ch2 1X Mag
Ch1 / Ch2 2X Mag
Ch1 / Ch2 3X Mag
Ch1 / Ch2 Not 1X
Ch1 / Ch2 Sum Harmonics
Acceleration
Ch1 / Ch2 gSE Overall
Data Unit selection for the specified
channel.
Measured values between Min Range and Max Range are
scaled into the range from 4.0 to 20.0 to produce the
output value. The Min Range value does not have to be
less than the Max Range value. If the Min Range value is
greater than the Max Range value, then the output signal
is effectively inverted from the input signal.
Publication GMSI10-UM013D-EN-P - May 2010
Page 93

Configuration Parameters 83
IMPORTANT
The 4-20 mA outputs are either on or off. When they are
on, the 4-20 mA output overshoots the 4 and 20mA limits
by 10% when the measurement exceeds the minimum and
maximum range. This means the minimum current
produced is 3.6 mA and the maximum current produced is
22 mA.
When the 4-20 mA outputs are off, the 4-20 mA output
produces a current approximately 2.9 mA. The 4-20 mA
outputs are off under the following conditions:
• The 4-20 mA outputs are set to "Disable" (see Enable
above).
• The module is in Program mode.
• A transducer fault or tachometer fault occurs that affects
the corresponding measurement.
Triggered Trend Parameters
The XM-122 module can collect a triggered trend. A triggered trend is a
time-based trend that is collected when a relay on the XM module is activated,
or the module receives a trigger event.
Once the triggered trend is configured, the XM-122 continuously monitors the
trended measurements. When a trigger occurs, the XM module collects
additional data as specified by the Post Trigger parameter. The XM-122 can
also store the spectrum or waveform at the time of the trigger.
The XM-122 can only store one triggered trend. Unless the triggered trend is
latched, the trend data is overwritten with new data when the next trigger
occurs.
The triggered trend parameters define the trend data that is collected by the
module. Use these parameters to select the measurements included in the
Publication GMSI10-UM013D-EN-P - May 2010
Page 94

84 Configuration Parameters
IMPORTANT
trend records, the interval between trend records, and which relay triggers
(activates) the collection of the trend data.
The Triggered Trend parameters are not included in the
EDS file and cannot be edited using generic configuration
tools such as RSNetWorx for DeviceNet.
Triggered Trend Parameters
Parameter Name Description Values/Comments
Enable Triggered Trend
Measurements
Select Measurements Sets the measurements to be collected and stored in
Enables/disables the triggered trend measurements.
Select to configure the triggered trend
measurements.
the module.
Check to enable.
Clear to disable.
1 to 16 measurements can be
selected.
Number of Records The maximum number of measurement sets that can
be collected in the trend buffer. The measurement
sets make up the trend data.
Latch Enable Determines whether the trigger trend is latched or
unlatched.
Latched means that subsequent triggers are ignored
after the initial trigger. This prevents the trend data
from being overwritten with new data until the
trigger is manually reset (click Reset Trigger
button).
Unlatched means that the trend data is overwritten
with new data every time a trigger occurs.
Relay Number Sets the relay that triggers the trend to be collected. None means that the trend can only be
Record Interval The amount of time between consecutive trend
records.
The Number of Records is
automatically calculated based upon
the number of Trended
Measurements selected.
Check means latched
Clear means unlatched
triggered manually or by a trigger
event (for example, XM-440).
Relay Number 1 is the on-board relay.
Numbers 2 through 5 are either relays
on the Expansion Relay module when
it’s connected to the module or virtual
relays.
Note: The relay must be enabled.
Refer to Relay Parameters on page 78.
1 to 3600 seconds
Publication GMSI10-UM013D-EN-P - May 2010
Note: If you enter a Record Interval, the Trend Span
is automatically updated.
Page 95

Configuration Parameters 85
Triggered Trend Parameters
Parameter Name Description Values/Comments
Trend Span The total amount of time that can be covered by the
trend data (Number of Records x Record
Interval).
Note: If you edit the Trend Span, the Record
Interval is automatically updated.
Post Trigger The percentage of records to be collected once the
trigger occurs. For example, if you set Post Trigger to
20%, then 80% of the records in the trend are before
the trigger occurs, and 20% of the records in the
trend are after the trigger occurs.
This allows you to evaluate what happened after the
trigger occurred.
Status Shows the status of the trend data. Possible status values:
Store Spectrum Stores the current spectrum data for both Channel 1
and Channel 2 when the trigger occurs.
Seconds
0 to 100 Percent
• Not collected - No trend data is
currently collected.
• Collecting - A trigger has occurred
and data (including post-trigger
data) is being collected.
• Collected - A trend has been saved
to the buffer and is available to view
and upload.
Store Waveform Stores the current waveform data for both Channel 1
and Channel 2 when the trigger occurs.
View Trend Data Displays a plot of the collected trend data.
Reset Trigger Resets the trigger if Latch enabled is selected. This
allows the module to overwrite the previous trend
data when the next trigger occurs.
Manual Trigger Triggers the module to collect the trend data without
relay activation.
View Collected Data Displays a plot of the collected spectrum or
waveform data.
SU/CD Trend Parameters
The XM-122 module can collect startup or coast-down trend data when the
machine speed passes into a defined speed range. A tachometer input is
required to collect the startup/coast-down trend.
The XM-122 collects a startup trend when the machine speed rises through
the Minimum Speed + 8 RPM, and stops when the machine speed crosses
either the Minimum Speed or the Maximum Speed. The module collects
data only when machine speed is increasing. It does not collect data if the
machine speed is constant or decreasing.
Publication GMSI10-UM013D-EN-P - May 2010
Page 96

86 Configuration Parameters
IMPORTANT
The XM-122 collects a coast-down trend when the machine speed falls
through the Maximum Speed - 8 RPM, and stops when the machine speed
crosses either the Minimum Speed or the Maximum Speed. The module
collects data when the machine speed is decreasing or increasing during the
coast-down trend (for example, a coast-down restart).
The XM-122 can only store one startup/coast-down trend. Unless the
startup/coast-down trend is latched, the trend data is overwritten with new
data when the next trigger occurs.
The SU/CD trend parameters define the trend data that is collected by the
module during the startup or coast-down of a machine. Use these parameters
to configure the measurements included in the startup and coast-down trend
records, the interval between trend records, and the minimum and maximum
speed limits at which record collection starts and stops.
The SU/CD Trend parameters are not included in the EDS
file and cannot be edited using generic configuration tools
such as RSNetWorx for DeviceNet.
SU/CD Trend Parameters
Parameter Name Description Values/Comments
Enable SU/CD Trend Enable/disable the SU/CD trend measurements.
Select to configure the SU/CD trend measurements.
Select Measurements Sets the measurements to be collected and stored in
the module.
Note: The Speed measurement is always included in
the startup/coast-down trend.
Number of Records The maximum number of measurement sets that can
be collected in the trend buffer. The measurement
sets make up the trend data.
Latch Enable Determines whether the startup/coast-down trend is
latched or unlatched.
Latched means that subsequent startup/coast-down
trends are ignored after the initial
startup/coast-down. This prevents the trend data
from being overwritten with new data until the
trigger is manually reset (click Reset Trigger
button).
Unlatched means that the startup/coast-down trend
data is overwritten with new data every time the
machine speed crosses into the speed range.
Record Interval The change in speed between consecutive records.
Check to enable.
Clear to disable.
1 to 16 measurements can be
selected.
The Number of Records is
automatically calculated based upon
the number of Trended
Measurements selected.
Check means latched
Clear means unlatched
1 to 3600 RPM
Publication GMSI10-UM013D-EN-P - May 2010
Note: If you enter a Record Interval, the Maximum
Trend Span is automatically updated.
Page 97

Configuration Parameters 87
SU/CD Trend Parameters
Parameter Name Description Values/Comments
Maximum Trend Span The maximum change in speed that can be covered
RPM
by the trend data (Number of Records x Record
Interval).
Note: If you edit the Trend Span, the Record
Interval is automatically updated.
Minimum Speed The lesser limit of the speed range in which records
RPM
are collected in the startup/coast-down trend. This
value must be less than the Maximum Speed
value.
Startup/Coast-down Trend
Considerations:
Maximum Speed The greater limit of the speed range in which records
are collected in the startup/coast-down trend. This
value must be greater than the Minimum Speed
value.
• The XM module collects a startup
trend when the machine speed rises
through the Minimum Speed +
8 RPM, and stops when the machine
speed crosses either the Minimum
Speed or the Maximum Speed.
The module collects data only when
the machine is increasing. It does
not collect data if the machine
speed is constant or decreasing.
• The XM module collects a
coast-down trend when the machine
speed falls through the Maximum
Speed - 8 RPM, and stops when the
machine speed crosses either the
Minimum Speed or the Maximum
Speed. The module collects data
when the machine speed is
decreasing or increasing during a
coast-down trend (for example, a
coast-down restart).
Status Shows the status of the trend data. Possible status values:
• Not collected - No trend data is
currently collected.
• Collecting - A trigger has occurred
and data is being collected.
• Collected - A trend has been saved
to the buffer and is available to view
or upload.
View Trend Data Displays a plot of the collected trend data.
Reset Trigger Resets the trigger if Latch enabled is selected. This
allows the module to overwrite the previous trend
data when the machine speed crosses into the speed
range.
Publication GMSI10-UM013D-EN-P - May 2010
Page 98

88 Configuration Parameters
IMPORTANT
XM Configuration
Utility
EDS File
Poll Output Poll
Response
Assembly
I/O Data Parameters
The I/O data parameters are used to configure the content and size of the
DeviceNet I/O Poll response message.
The XM-122 must be free of Poll connections when
configuring the Poll Output (Poll Response Assembly)
and Poll Size. Any attempt to download the parameters
while a master has established the Poll connection with the
XM-122 will result in an error.
To close an existing Poll connection with an XM-440,
switch the XM-440 from Run mode to Program mode.
Refer to Changing Operation Modes on page 103.
To close an existing Poll connection with other master
devices, remove the XM-122 from the scan list or turn off
the master device.
I/O Data Parameters
Parameter Name Description Values/Comments
COS Size (XM Serial
Configuration Utility only)
COS Output (XM Serial
Configuration Utility only)
Poll Size Sets the size (number of bytes) of the Poll response
The size (number of bytes) of the Change of State
(COS) message.
The Assembly instance used for the COS message.
The COS message is used to produce the Alarm and
Relay status for the module.
message. Decreasing the maximum size will truncate
data from the end of the Assembly structure.
The COS Size cannot be changed.
The COS Output cannot be changed.
Refer to COS Message Format on
page 114 for more information.
The minimum size is 4 bytes and the
maximum size is 124 bytes.
Assembly Instance Table (XM
Serial Configuration Utility only)
Custom Assembly (XM Serial
Configuration Utility only)
Publication GMSI10-UM013D-EN-P - May 2010
Important: If you set the Poll Output to "Custom
Assembly," the poll size is automatically set to the
actual size of the customized Poll response.
Sets the Assembly instance used for the Poll
response message. Each Assembly instance contains
a different arrangement of the Poll data.
The Poll response message is used by the XM
module to produce measured values. It can contain
up to 31 REAL values for a total of 124 bytes of data.
Displays the format of the currently selected COS or
Poll Assembly instance.
Defines a custom data format for the Poll response.
The custom assembly can contain any of the
measurement parameters included in Assembly
instance 101, as well as alarm and relay
configuration parameters.
Options: Assembly Instance 101
Assembly Instance 102
Assembly Instance 103
Assembly Instance 104
Assembly Instance 105
Assembly Instance 106
Custom Assembly
Refer to Poll Message Format on
page 107 for more information.
The highlighted (yellow) Assembly
structure bytes are included in the I/O
message.
You can select up to 20 parameters.
Refer to Poll Message Format on
page 107 for more information.
Page 99

Configuration Parameters 89
TIP
XM Configuration
Utility
EDS File
Transducer Fault Transducer
Status
XM Configuration
Utility
EDS File
DC Gap Voltage Measured
DC Bias
XM Configuration
Utility
EDS File
Sum Harmonics Sum
Harmonics
Value
XM Configuration
Utility
EDS File
Band
Measurement
Band
Measured
Value
Data Parameters
The Data parameters are used to view the measured values of the input
channels and the 4–20 mA outputs, as well as to monitor the status of the
channels, alarms, and relays.
To view all the data parameters in the XM Serial
Configuration Utility, click the View Data tab.
Monitor Data Parameters
Monitor Data Parameters
Parameter Name Description Values/Comments
States whether a transducer fault exists on the
associated channel.
If a fault exists, the overall and gap values may not
be accurate.
Shows the measured average DC offset of the
transducer signal. This value is compared with Fault
High and Fault Low to determine whether the
transducer is working properly.
Possible status values: No Fault
Fault
Gap Value (EDS File only) Shows the measured transducer gap value.
Overall Shows the measured overall value.
Band Measurement Status (XM
Serial Configuration Utility only)
Shows the measured sum harmonics value. Sum Harmonics Requirements:
• The tachometer must be enabled
(Pulses Per Revolution set to 1 or
more), and a tachometer signal must
be present.
• Sampling Mode must be set to
"Synchronous."
States whether a fault condition exists on the
associated channel. If a fault exists, the band
measurements may not be accurate.
Shows the measured band value.
Possible status values: No Fault
Fault
Publication GMSI10-UM013D-EN-P - May 2010
Page 100

90 Configuration Parameters
XM Configuration
Utility
EDS File
Speed Status Transducer 3
Status
Monitor Data Parameters
Parameter Name Description Values/Comments
Not 1X and Vector Status (XM
Serial Configuration Utility only)
States whether a fault condition exists on the
associated channel. If a fault exists, the not 1X and
Possible status values: No Fault
vector measurements may not be accurate.
The following conditions can cause a fault:
• a transducer fault on the associated channel
• no tachometer signal or a transducer fault exists
on the tachometer channel
• the machine speed changes too fast for the
tracking algorithm to keep up or if the frequency of
FMAX goes outside the range of 10 to 5000Hz
Fault
Not 1X Value Shows the magnitude of the vibration excluding the
vibration at the machine speed.
1X Magnitude The magnitude of the vibration at the machine
speed.
1X Phase The phase of the vibration at the machine speed.
2X Magnitude The magnitude of the vibration at two times the
machine speed.
2X Phase The phase of the vibration at two times the machine
speed.
3X Magnitude The magnitude of the vibration at three times the
machine speed.
Ch1/Ch2 Spectrum/Waveform
Status (XM Serial Configuration
Utility only)
States whether a fault condition exists on the
associated channel. If a fault exists, the
spectrum/waveform data may not be accurate.
The following conditions can cause a fault:
• a transducer fault on the associated channel
• Sampling Mode set to "Synchronous" and there
is no tachometer signal or there is a fault on the
tachometer channel
Get Waveform Data Only (XM
Serial Configuration Utility only)
Controls whether the spectrum is calculated by the
Configuration Utility or the Vibration module.
States whether a fault condition (no tachometer
signal or transducer fault) exists on the tachometer
channel. If a fault exists, the speed value may not be
accurate.
The tachometer must be enabled
(Pulses Per Revolution set to 1 or
more), and a tachometer signal must
be present.
Possible status values: No Fault
Fault
Check to upload only waveform data
from the module. The Configuration
Utility calculates and displays the
spectrum using the collected
waveform data.
Clear to upload both the waveform
and spectrum data from the module.
Possible status values: No Fault
Fault
Publication GMSI10-UM013D-EN-P - May 2010
 Loading...
Loading...