

Page 1

XM-320 Position Module
User Guide
Firmware Revision 5
1440-TPS02-01RB
Page 2
Important User Information
WARNING
IMPORTANT
ATTENTION
SHOCK HAZARD
BURN HAZARD
Solid state equipment has operational characteristics differing from those of electromechanical equipment. Safety Guidelines for the
Application, Installation and Maintenance of Solid State Controls (publication SGI-1.1 available from your local Rockwell Automation sales
office or online at http://literature.rockwellautomation.com
wired electromechanical devices. Because of this difference, and also because of the wide variety of uses for solid state equipment, all
persons responsible for applying this equipment must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use or
application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and requirements
associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for actual use based on the
examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software described in
this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
Identifies information about practices or circumstances that can cause an explosion in a
hazardous environment, which may lead to personal injury or death, property damage, or
economic loss.
) describes some important differences between solid state equipment and hard-
Identifies information that is critical for successful application and understanding of the product.
Identifies information about practices or circumstances that can lead to personal injury or death,
property damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and
recognize the consequence
Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
dangerous voltage may be present.
Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
surfaces may reach dangerous temperatures.
Allen-Bradley, Rockwell Automation, and XM are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3
Safety Approvals
WARNING
AVERTISSEMENT
IMPORTANT
The following information applies when operating
this equipment in hazardous locations.
Products marked "CL I, DIV 2, GP A, B, C, D" are suitable
for use in Class I Division 2 Groups A, B, C, D, Hazardous
Locations and nonhazardous locations only. Each product
is supplied with markings on the rating nameplate
indicating the hazardous location temperature code.
When combining products within a system, the most
adverse temperature code (lowest "T" number) may be
used to help determine the overall temperature code of
the system. Combinations of equipment in your system
arfe subject to investigation by the local Authority Having
Jurisdiction at the time of installation.
EXPLOSION HAZARD -
•Do not disconnect equipment unless power
has been removed or the area is known to be
nonhazardous.
•Do not disconnect connections to this
equipment unless power has been removed
or the area is known to be nonhazardous.
Secure any external connections that mate to
this equipment by using screws, sliding
latches, threaded connectors, or other means
provided with this product.
•Substitution of components may impair
suitability for Class I, Division 2.
•If this product contains batteries, they must
only be changed in an area known to be
nonhazardous.
Informations sur l’utilisation de cet équipement en
environnements dangereux.
Les produits marqués "CL I, DIV 2, GP A, B, C, D" ne
conviennent qu'à une utilisation en environnements de
Classe I Division 2 Groupes A, B, C, D dangereux et non
dangereux. Chaque produit est livré avec des marquages
sur sa plaque d'identification qui indiquent le code de
température pour les environnements dangereux. Lorsque
plusieurs produits sont combinés dans un système, le
code de température le plus défavorable (code de
température le plus faible) peut être utilisé pour
déterminer le code de température global du système. Les
combinaisons d'équipements dans le système sont
sujettes à inspection par les autorités locales qualifiées
au moment de l'installation.
RISQUE D’EXPLOSION –
•Couper le courant ou s'assurer que
l'environnement est classé non dangereux
avant de débrancher l'équipement.
•Couper le courant ou s'assurer que
l'environnement est classé non dangereux
avant de débrancher les connecteurs. Fixer
tous les connecteurs externes reliés à cet
équipement à l'aide de vis, loquets
coulissants, connecteurs filetés ou autres
moyens fournis avec ce produit.
•La substitution de composants peut rendre
cet équipement inadapté à une utilisation en
environnement de Classe I, Division 2.
•S'assurer que l'environnement est classé non
dangereux avant de changer les piles.
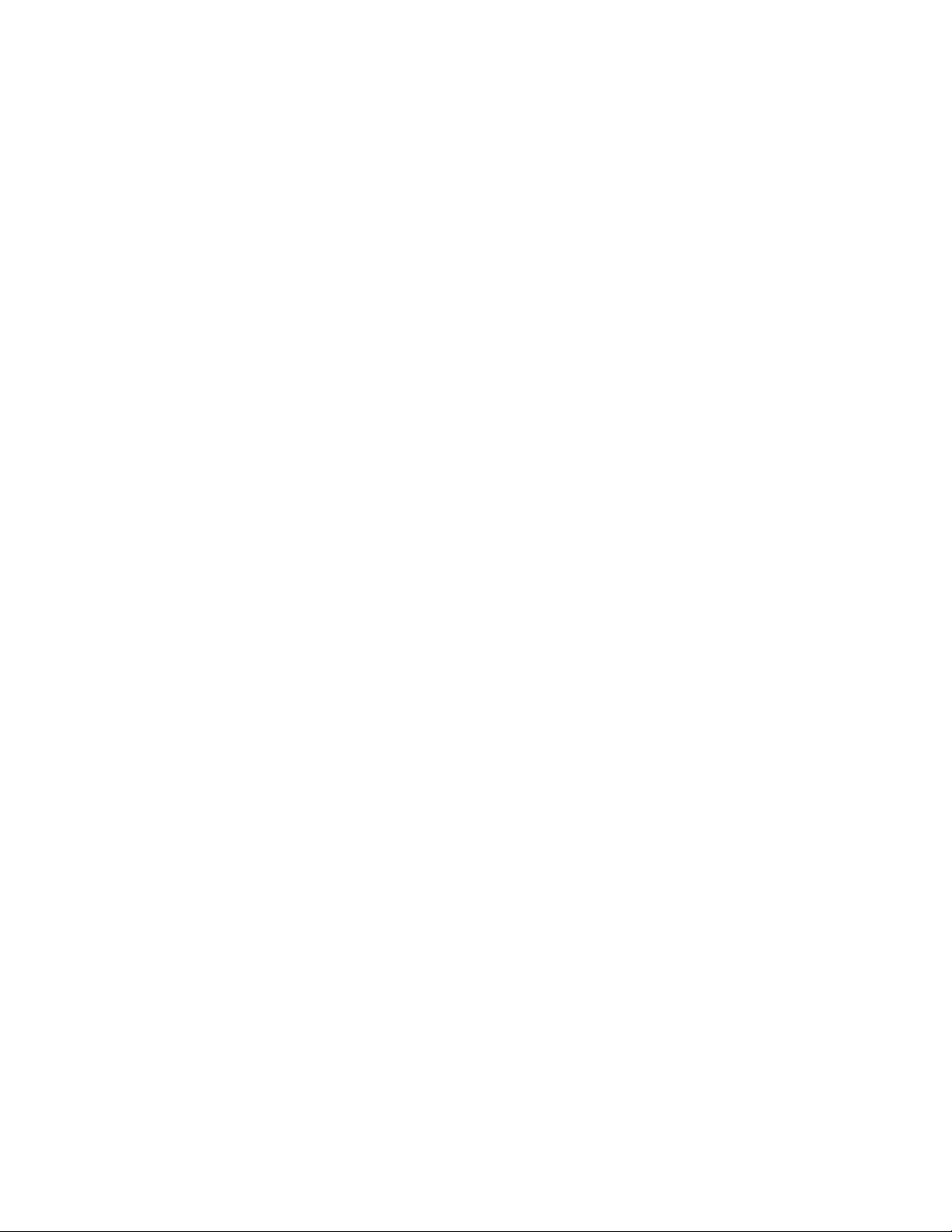
Wiring to or from this device, which enters or leaves the system enclosure, must
utilize wiring methods suitable for Class I, Division 2 Hazardous Locations, as
appropriate for the installation in accordance with the product drawings as
indicated in the following table.
Model Catalog Number Haz Location Drawings* Model Catalog Number Haz Location Drawings*
w/o
Barriers
XM-120 1440-VST0201RA
XM-121 1440-VLF0201RA XM-360 1440-TPR0600RE
XM-122 1440-VSE0201RA XM-361 1440-TUN0600RE
XM-123 1440-VAD0201RA XM-361 1440-TTC0600RE
XM-160 1440-VDRS0600RH
XM-161 1440-VDRS0606RH XM-441 1440-REX0004RD 48241-HAZ N/A
XM-162 1440-VDRP0600RH XM-442 1440-REX0304RG 48642-HAZ N/A
XM-220 1440-SPD0201RB 48640-HAZ 48641-HAZ
48178-HAZ 48179-HAZ
51263-HAZ 51264-HAZ
* Drawings are available on the included CD
w/
Barriers
w/o
Barriers
XM-320 1440-TPS0201RB 48238-HAZ 48239-HAZ
48295-HAZ 48299-HAZ
XM-440 1440-RMA0004RC 48240-HAZ N/A
w/
Barriers
Page 4
Page 5

Introduction
Installing the XM-320 Position
Module
Table of Contents
Chapter 1
Introducing the XM-320 Position Module . . . . . . . . . . . . . . . . . . . . . . . 1
XM-320 Module Components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Using this Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Organization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Document Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Chapter 2
XM Installation Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Wiring Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Power Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Grounding Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Mounting the Terminal Base Unit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
DIN Rail Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Interconnecting Terminal Base Units . . . . . . . . . . . . . . . . . . . . . . . 17
Panel/Wall Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Connecting Wiring for Your Module . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Terminal Block Assignments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Connecting the Power Supply. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Connecting the Relays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Connecting the Short Circuit Protected Output . . . . . . . . . . . . . . 26
Connecting the Remote Relay Reset Signal . . . . . . . . . . . . . . . . . . 27
Connecting the Setpoint Multiplication Switch . . . . . . . . . . . . . . . 29
Connecting the 4-20mA Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Connecting the Transducer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
PC Serial Port Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
DeviceNet Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Mounting the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Module Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Basic Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Powering Up the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Manually Resetting Relays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Chapter 3
Configuration Parameters
v Publication GMSI10-UM005C-EN-P - May 2010
Channel Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Measurement Mode Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Normal Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Head-To-Head Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Radial Cancel Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Alarm Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Relay Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4-20mA Output Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Triggered Trend Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
I/O Data Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Page 6

Table of Contents vi
Specifications
DeviceNet Information
Data Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Channel Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Alarm and Relay Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Device Mode Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Appendix A
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Appendix B
Electronic Data Sheets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Changing Operation Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Transition to Program Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Transition to Run Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
XM Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Invalid Configuration Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
XM-320 I/O Message Formats. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Poll Message Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
COS Message Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Bit-Strobe Message Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
ADR for XM Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
DeviceNet Objects
Appendix C
Identity Object (Class ID 01H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
DeviceNet Object (Class ID 03H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Assembly Object (Class ID 04H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Assembly Instance Attribute Data Format. . . . . . . . . . . . . . . . . . . 88
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Connection Object (Class ID 05H). . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Instances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Publication GMSI10-UM005C-EN-P - May 2010
Page 7

Table of Contents vii
Discrete Input Point Object (Class ID 08H) . . . . . . . . . . . . . . . . . . . . 92
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Analog Input Point Object (Class ID 0AH). . . . . . . . . . . . . . . . . . . . . 93
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Parameter Object (Class ID 0FH). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Instance Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Acknowledge Handler Object (Class ID 2BH) . . . . . . . . . . . . . . . . . . 98
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Alarm Object (Class ID 31DH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Device Mode Object (Class ID 320H) . . . . . . . . . . . . . . . . . . . . . . . . 101
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Relay Object (Class ID 323H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Transducer Object (Class ID 328H) . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4-20mA Output Object (Class ID 32AH) . . . . . . . . . . . . . . . . . . . . . 106
Class Attributes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Instances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Instance Attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Glossary
Index
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Publication GMSI10-UM005C-EN-P - May 2010
Page 8

Table of Contents viii
Publication GMSI10-UM005C-EN-P - May 2010
Page 9
Chapter
Introduction
This chapter provides an overview of the XM-320 Position module. It also
discusses the components of the module.
For information about See page
Introducing the XM-320 Position Module 1
XM-320 Module Components 3
Using this Manual 4
1
Introducing the XM-320 Position Module
The XM-320 Position module is a 2-channel general purpose monitor. It is a
®
member of the Allen-Bradley™ XM
condition monitoring and protection modules that operate both in stand-alone
applications or integrate with Programmable Logic Controllers (PLCs) and
control system networks.
The XM-320 supports the following measurements:
• Axial Position (Thrust) - Axial position (thrust) is a measurement of
the relative position of the thrust collar to the thrust bearing. It is a
measurement that may be made in both the active and inactive thrust
directions. The primary purpose of this measurement is to monitor
thrust bearing wear and to insure against axial rubs. It is recommended
that at least two separate transducers monitor axial position so that the
redundancy will give added protection.
Most steam turbine rotors operate within the total clearance between
thrust shoes (float). Normally this clearance is anywhere from 0.010 to
0.024 inches. The axial measurements are obtained by mounting a
non-contact probe axially, looking at the thrust collar or shaft. The
sensor provides a continuous measurement of the rotor position with
respect to the thrust bearing. In most applications, the thrust detector is
located in close proximity to the thrust bearing, normally located in the
turbine front standard.
Series, a family of DIN rail mounted
1 Publication GMSI10-UM005C-EN-P - May 2010
Page 10

2 Introduction
• Cam (Valve) Position - Valve position is a measurement of the main
steam inlet valve stem position. The valve position measurement
provides the operator with the current load on the machine.
The amount of the steam valve opening, speed, governor, and relay
valve position indication assists the operator in controlling the unit
during startup and emergencies. When used in conjunction with data
from other related Turbine Supervisory Instrumentation (TSI)
indicators, load, or steam flow related machinery conditions can be
diagnosed.
• Shell (Case) Expansion - Shell (Case) expansion is a measurement of
the thermal growth of the case from its fixed point outward. Steam
temperature swings widely between startup, shutdown, and various
operating conditions. The high pressure turbine end must move axially
as expansion and contraction occurs. Continuous indication of shell
thermal growth enables the operator to accelerate or change turbine
load without excessive distortion of the machine shell.
• Differential Expansion - Differential expansion (DE) is a
measurement of the differences between the thermal growth of the
rotor compared to the case.
Differential expansion monitoring provides the machine operator with
continuous indication of the critical clearances between the expanding
rotor and blades with respect to the expanding shell or casing. Proper
coordination of machine parameters enables safe machine acceleration
and operation during load changes and emergencies. To prevent axial
rubs it is important that the rotor and case grow at the same rate.
Differential expansion is most important during a turbine “cold”
startup. The rotor is fixed axially by the thrust bearing. The thrust
bearing moves as the case expands – thus the need to monitor the
difference in thermal expansion. Ideally, differential expansion should
indicate zero change in the gap relationship between the two surfaces.
When the shell growth leads or lags the rotor growth, or conversely the
rotor expansion leads or lags the shell growth, an expansion differential
occurs.
The XM-320 accepts input from linear variable differential transformers
(LVDT), non-contact eddy current probes, rotary cam (valve) potentiometers,
or any voltage output position measurement device.
Publication GMSI10-UM005C-EN-P - May 2010
Page 11

Introduction 3
P
O
S
I
T
I
O
N
1
4
4
0
-
T
P
S
0
2
-
0
1
R
B
XM-941 Position Module Terminal Base Unit
Cat. No. 1440-TB-B
XM-320 Position Module
Cat. No. 1440-TPS02-01RB
The XM-320 also includes a single on-board relay, expandable to five, two
4-20mA outputs, and a buffered output for each input. The module can collect
trend data on event, and monitor up to two alarms making it a complete
position monitoring system. The module can operate stand-alone, or it can be
deployed on a standard or dedicated DeviceNet network where it can provide
real-time data and status information to other XM modules, PLCs, DCS, and
Condition Monitoring Systems.
The XM-320 module is configurable over a DeviceNet network or using a
serial connection to a PC or laptop. Refer to Chapter 3 for a list of the XM-320
configuration parameters.
XM-320 Module Components
The XM-320 consists of a terminal base unit and an instrument module. The
XM-320 Position Module and the XM-941 Position Terminal Base are shown
below.
Figure 1.1 XM-320 Module Components
• XM-941 Position Module Terminal Base Unit - A DIN rail mounted
base unit that provides terminations for all field wiring required by XM
Position modules, including the XM-320.
Publication GMSI10-UM005C-EN-P - May 2010
Page 12
4 Introduction
IMPORTANT
• XM-320 Position Module - Mounts on the XM-941 terminal base unit
via a keyswitch and a 96-connector. The XM-320 contains the
measurement electronics, processor, relay, and serial interface port for
local configuration.
The XM-441 Expansion Relay module may be connected
to the XM-320 module via the XM-941 terminal base unit.
When connected to the XM-320, the Expansion Relay
module simply “expands” the capability of the XM-320 by
adding four additional epoxy-sealed relays. The XM-320
controls the Expansion Relay module by extending to it the
same logic and functional controls as the XM-320 module’s
on-board relay.
Using this Manual
This manual introduces you to the XM-320 Position module. It is intended for
anyone who installs, configures, or uses the XM-320 Position module.
Organization
To help you navigate through this manual, it is organized in chapters based on
these tasks and topics.
Chapter 1 “Introduction” contains an overview of this manual and the
XM-320 module.
Chapter 2 “Installing the XM-320 Position Module” describes how to install,
wire, and use the XM-320 module.
Chapter 3 “Configuration Parameters” provides a complete listing and
description of the XM-320 parameters. The parameters can be viewed and
edited using the XM Serial Configuration Utility software and a personal
computer.
Appendix A “Specifications” lists the technical specifications for the XM-320
module.
Publication GMSI10-UM005C-EN-P - May 2010
Appendix B “DeviceNet Information” provides information to help you
configure the XM-320 over a DeviceNet network.
Appendix C “DeviceNet Objects” provides information on the DeviceNet
objects supported by the XM-320 module.
For definitions of terms used in this Guide, see the Glossary at the end of the
Guide.
Page 13
Introduction 5
TIP
EXAMPLE
Document Conventions
There are several document conventions used in this manual, including the
following:
The XM-320 Position Module is referred to as XM-320, Position module,
module, or device throughout this manual.
A tip indicates additional information which may be
helpful.
This convention presents an example.
Publication GMSI10-UM005C-EN-P - May 2010
Page 14

6 Introduction
Publication GMSI10-UM005C-EN-P - May 2010
Page 15
Chapter
ATTENTION
2
Installing the XM-320 Position Module
This chapter discusses how to install and wire the XM-320 Position Module. It
also describes the module indicators and the basic operations of the module.
For information about See page
XM Installation Requirements 8
Mounting the Terminal Base Unit 15
Connecting Wiring for Your Module 19
Mounting the Module 39
Module Indicators 41
Basic Operations 43
Environment and Enclosure
This equipment is intended for use in a Pollution Degree 2
Industrial environment, in overvoltage Category II applications
(as defined in IED publication 60664–1), at altitudes up to 2000
meters without derating.
This equipment is supplied as “open type” equipment. It must be
mounted within an enclosure that is suitably designed for those
specific environmental conditions that will be present, and
appropriately designed to prevent personal injury resulting from
accessibility to live parts. The interior of the enclosure must be
accessible only by the use of a tool. Subsequent sections of this
publication may contain additional information regarding specific
enclosure type ratings that are required to comply with certain
product safety certifications.
See NEMA Standards publication 250 and IEC publication
60529, as applicable, for explanations of the degrees of
protection provided by different types of enclosures.
7 Publication GMSI10-UM005C-EN-P - May 2010
Page 16
8 Installing the XM-320 Position Module
ATTENTION
ATTENTION
XM Installation Requirements
This section describes wire, power and grounding requirements, and
instructions for an XM system.
Wiring Requirements
Use solid or stranded wire. All wiring should meet the following specifications:
• 14 to 22 AWG copper conductors without pretreatment; 8 AWG
required for grounding the DIN rail for electromagnetic interference
(emi) purposes
• Recommended strip length 8 millimeters (0.31 inches)
• Minimum insulation rating of 300V
• Soldering the conductor is forbidden
• Wire ferrules can be used with stranded conductors; copper ferrules
recommended
See the XM Documentation and Configuration Utility CD
for Hazardous Locations installation drawings. The XM
Documentation and Configuration Utility CD is packaged
with the XM modules.
Power Requirements
Before installing your module, calculate the power requirements of all modules
interconnected via their side connectors. The total current draw through the
side connector cannot exceed 3A. Refer to the specifications for the specific
modules for power requirements.
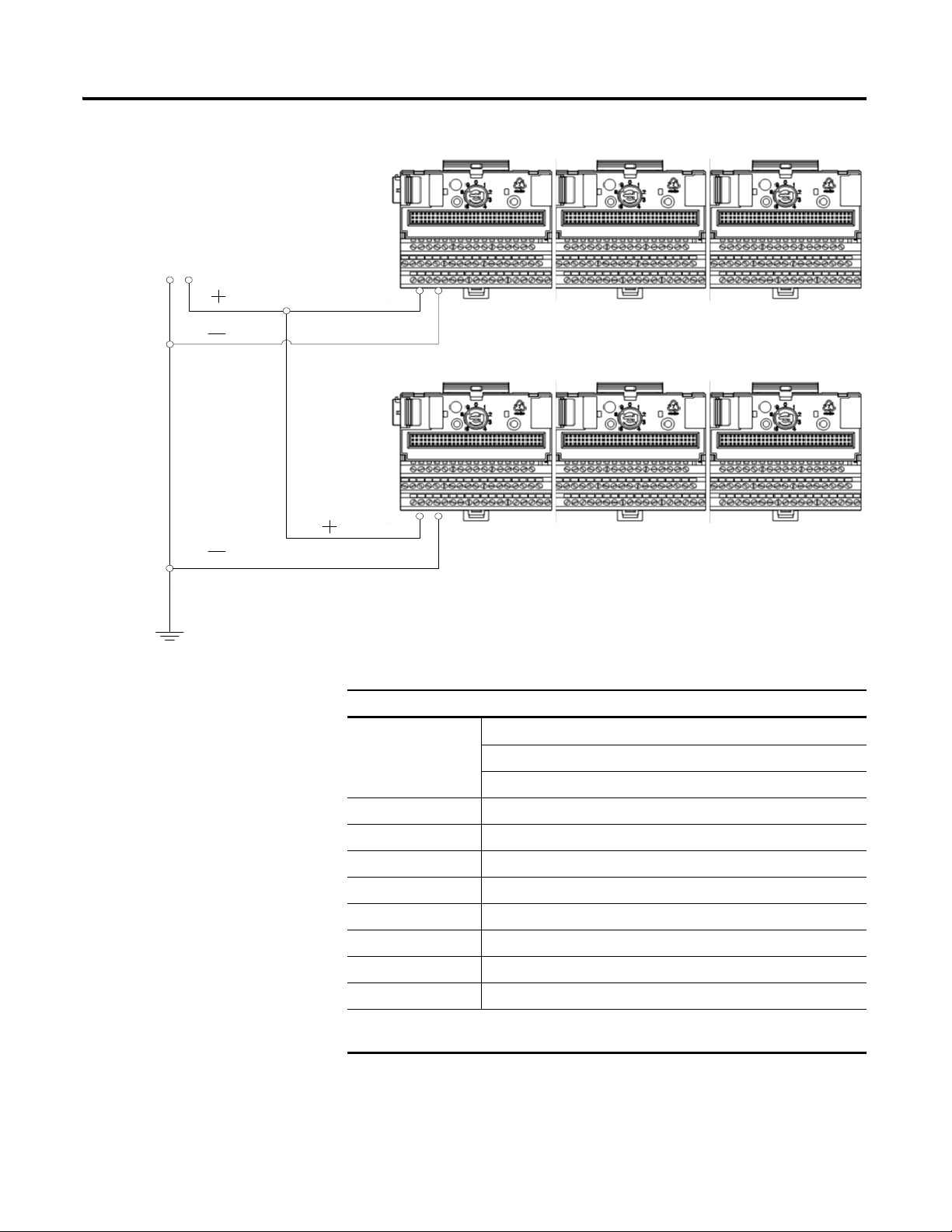
A separate power connection is necessary if the total
current draw of the interconnecting modules is greater than
3A.
Figure 2.1 is an illustration of wiring modules using separate power
connections.
Publication GMSI10-UM005C-EN-P - May 2010
Page 17
Installing the XM-320 Position Module 9
Any limited power
source that satisfies
the requirements
specified below
Figure 2.1 XM Modules with Separate Power Connections
Power Supply Requirements
XM Power Supply Requirements
Listed Class 2 rated supply, or
Protection
Output Voltage 24 Vdc ± 10%
Output Power 100 Watts Maximum (~4A @ 24 Vdc)
Static Regulation ± 2%
Dynamic Regulation ± 3%
Ripple < 100mVpp
Output Noise Per EN50081-1
Overshoot < 3% at turn-on, < 2% at turn-off
Hold-up Time As required (typically 50mS at full rated load)
* When a fused supply is used the fuse must be a 5 amp, listed, fast acting fuse such as
provided by Allen-Bradley part number 1440-5AFUSEKIT
Fused* ITE Listed SELV supply, or
Fused* ITE Listed PELV supply
Publication GMSI10-UM005C-EN-P - May 2010
Page 18
10 Installing the XM-320 Position Module
IMPORTANT
See Application Technique "XM Power Supply Solutions",
publication ICM-AP005A-EN-E, for guidance in
architecting power supplies for XM systems.
Grounding Requirements
Use these grounding requirements to ensure safe electrical operating
circumstances, and to help avoid potential emi and ground noise that can cause
unfavorable operating conditions for your XM system.
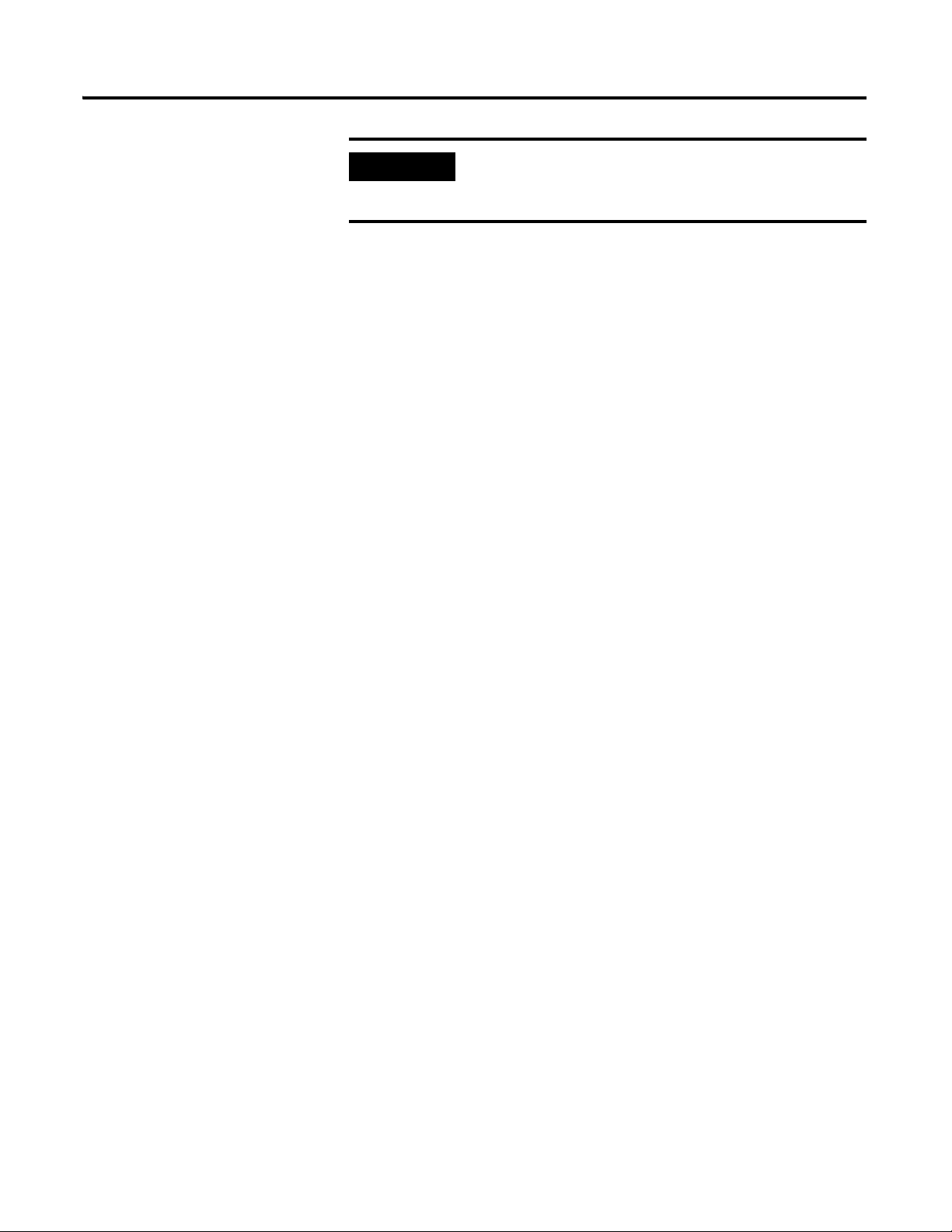
DIN Rail Grounding
The XM modules make a chassis ground connection through the DIN rail.
The DIN rail must be connected to a ground bus or grounding electrode
conductor using 8 AWG or 1 inch copper braid. See Figure 2.2.
Use zinc-plated, yellow-chromated steel DIN rail (Allen-Bradley part no.
199-DR1 or 199-DR4) or equivalent to assure proper grounding. Using other
DIN rail materials (e.g. aluminum, plastic, etc.), which can corrode, oxidize, or
are poor conductors can result in improper or intermittent platform
grounding.
Publication GMSI10-UM005C-EN-P - May 2010
Page 19
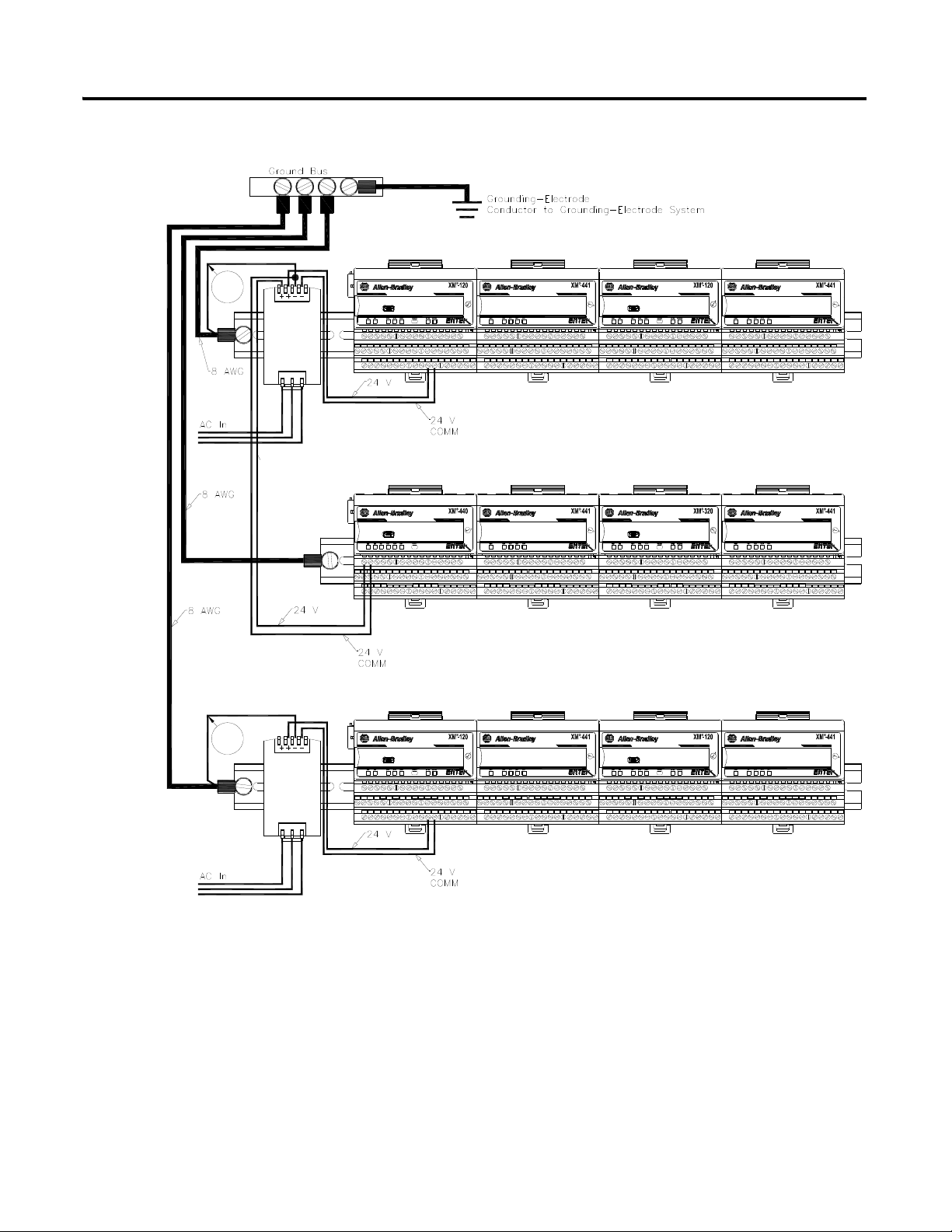
Figure 2.2 XM System DIN Rail Grounding
Power
Supply
DYNAMIC MEASUREMENT
1440-VST02-01RA
DYNAMIC MEASUREMENT
1440-VST02-01RA
POSITION
1440-TSP02-01RB
MASTER RELAY
1440-RMA00-04RC
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
Power
Supply
DYNAMIC MEASUREMENT
1440-VST02-01RA
DYNAMIC MEASUREMENT
1440-VST02-01RA
EXPANSION RELAY
1440-REX00-04RD
EXPANSION RELAY
1440-REX00-04RD
1
1
Installing the XM-320 Position Module 11
1 Use 14 AWG wire.
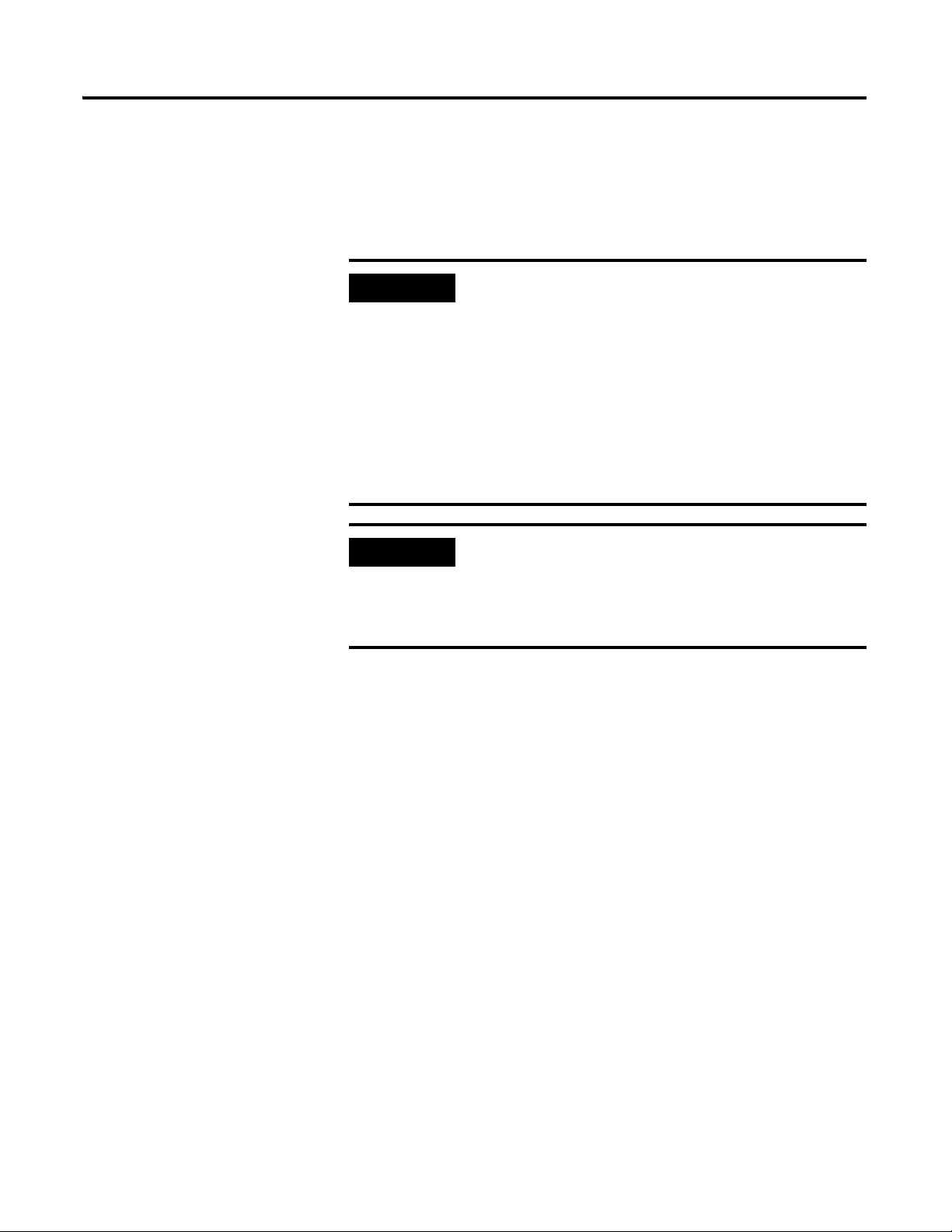
The grounding wire can be connected to the DIN rail using a DIN Rail
Grounding Block (Figure 2.3).
Publication GMSI10-UM005C-EN-P - May 2010
Page 20
12 Installing the XM-320 Position Module
Figure 2.3 DIN Rail Grounding Block
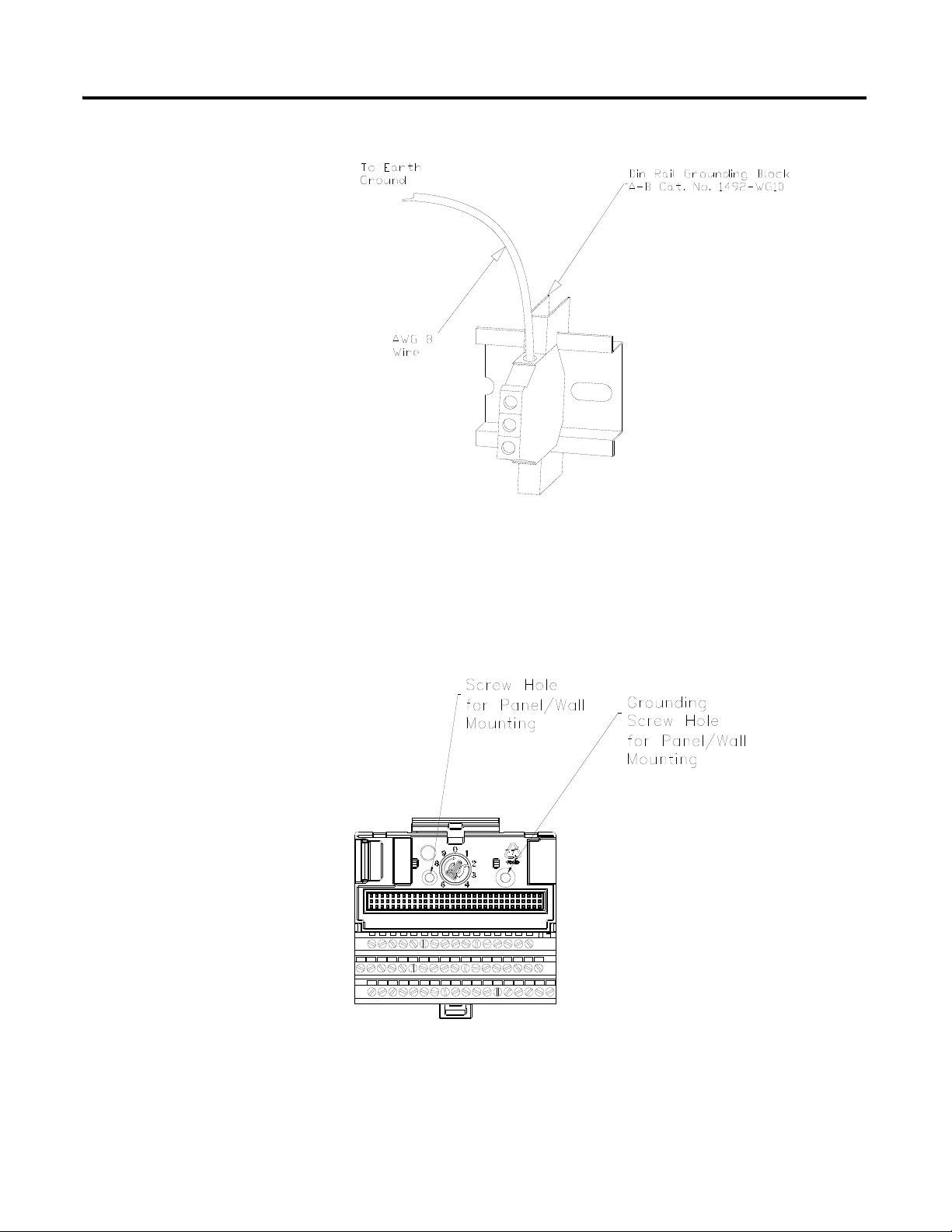
Panel/Wall Mount Grounding
The XM modules can also be mounted to a conductive mounting plate that is
grounded. See Figure 2.5. Use the grounding screw hole provided on the
terminal base to connect the mounting plate the Chassis terminals.
Figure 2.4 Grounding Screw on XM Terminal Base
Publication GMSI10-UM005C-EN-P - May 2010
Page 21
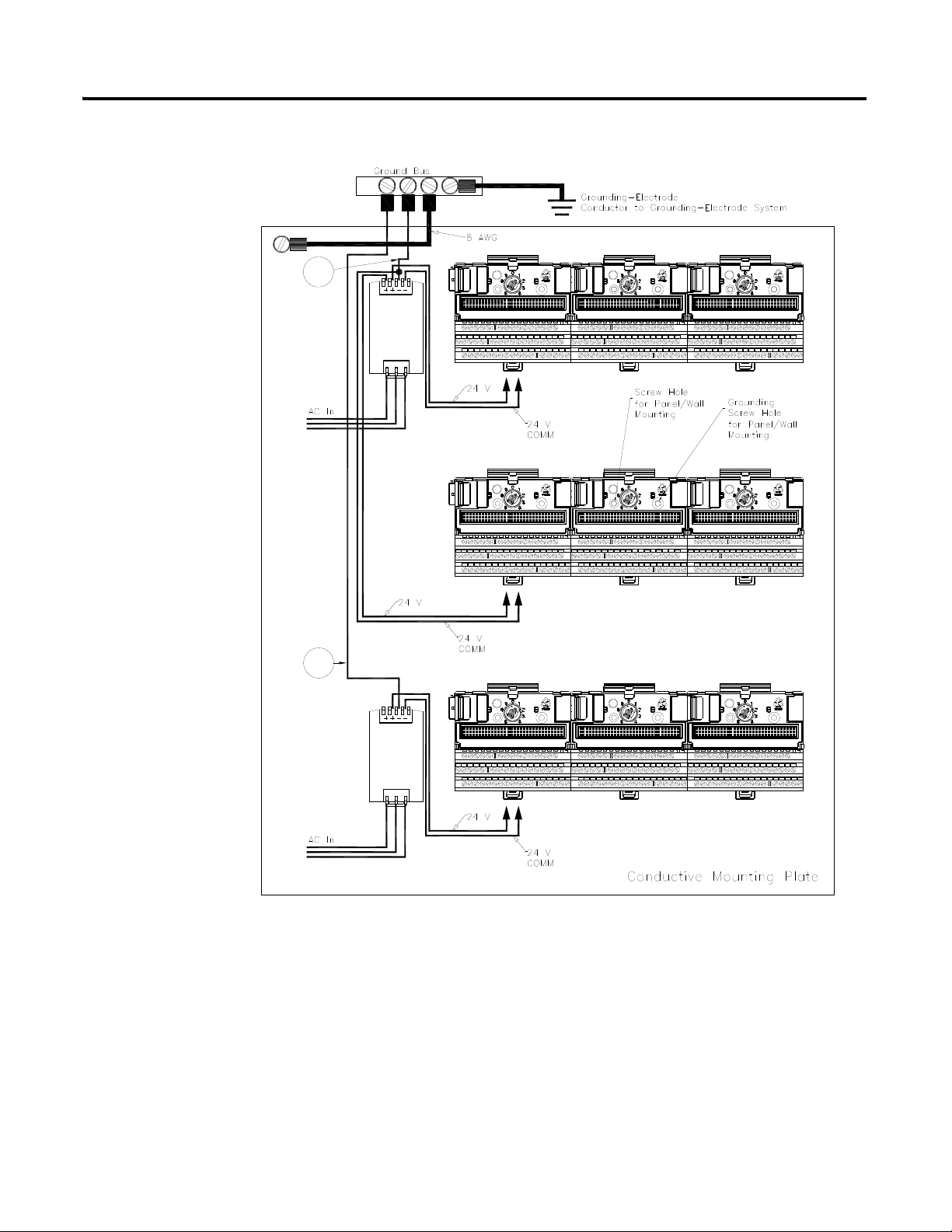
Figure 2.5 Panel/Wall Mount Grounding
Power
Supply
Power
Supply
1
1
Installing the XM-320 Position Module 13
1 Use 14 AWG wire.
Publication GMSI10-UM005C-EN-P - May 2010
Page 22
14 Installing the XM-320 Position Module
IMPORTANT
IMPORTANT
24V Common Grounding
24V power to the XM modules must be grounded. When two or more power
supplies power the XM system, ground the 24V Commons at a single point,
such as the ground bus bar.
If it is not possible or practical to ground the -24Vdc
supply, then it is possible for the system to be installed and
operate ungrounded. However, if installed ungrounded
then the system must not be connected to a ground
through any other circuit unless that circuit is isolated
externally. Connecting a floating system to a non-isolated
ground could result in damage to the XM module(s)
and/or any connected device. Also, operating the system
without a ground may result in the system not performing
to the published specifications regards measurement
accuracy and communications speed, distance or reliability.
The 24V Common and Signal Common terminals are
internally connected. They are isolated from the Chassis
terminals unless they are connected to ground as described
in this section. See Terminal Block Assignments on page 20
for more information.
Transducer Grounding
Make certain the transducers are electrically isolated from earth ground. Cable
shields must be grounded at one end of the cable, and the other end left
floating or not connected. It is recommended that where possible, the cable
shield be grounded at the XM terminal base (Chassis terminal) and not at the
transducer.
DeviceNet Grounding
The DeviceNet network is functionally isolated and must be referenced to
earth ground at a single point. XM modules do not require an external
DeviceNet power supply. Connect DeviceNet V- to earth ground at one of the
XM modules, as shown in Figure 2.6.
Publication GMSI10-UM005C-EN-P - May 2010
Page 23
Installing the XM-320 Position Module 15
To
Ground
Bus
ATTENTION
Figure 2.6 Grounded DeviceNet V- at XM Module
Use of a separate DeviceNet power supply is not
permitted. See Application Technique "XM Power Supply
Solutions", publication ICM-AP005A-EN-E, for guidance
in using XM with other DeviceNet products.
Mounting the Terminal Base Unit
For more information on the DeviceNet installation, refer to the ODVA
Planning and Installation Manual - DeviceNet Cable System, which is available
on the ODVA web site (http://www.odva.org).
Switch Input Grounding
The Switch Input circuits are functionally isolated from other circuits. It is
recommended that the Switch RTN signal be grounded at a single point.
Connect the Switch RTN signal to the XM terminal base (Chassis terminal) or
directly to the DIN rail, or ground the signal at the switch or other equipment
that is wired to the switch.
The XM family includes several different terminal base units to serve all of the
measurement modules. The XM-941 terminal base, Cat. No. 1440-TB-B, is the
only terminal base unit used with the XM-320.
Publication GMSI10-UM005C-EN-P - May 2010
Page 24
16 Installing the XM-320 Position Module
ATTENTION
Position terminal base at a slight angle and hook over the top of the DIN rail.
The terminal base can be DIN rail or wall/panel mounted. Refer to the
specific method of mounting below.
The XM modules make a chassis ground connection
through the DIN rail. Use zinc plated, yellow chromated
steel DIN rail to assure proper grounding. Using other
DIN rail materials (e.g. aluminum, plastic, etc.), which can
corrode, oxidize or are poor conductors can result in
improper or intermittent platform grounding.
You can also mount the terminal base to a grounded
mounting plate. Refer to Panel/Wall Mount Grounding on
page 12.
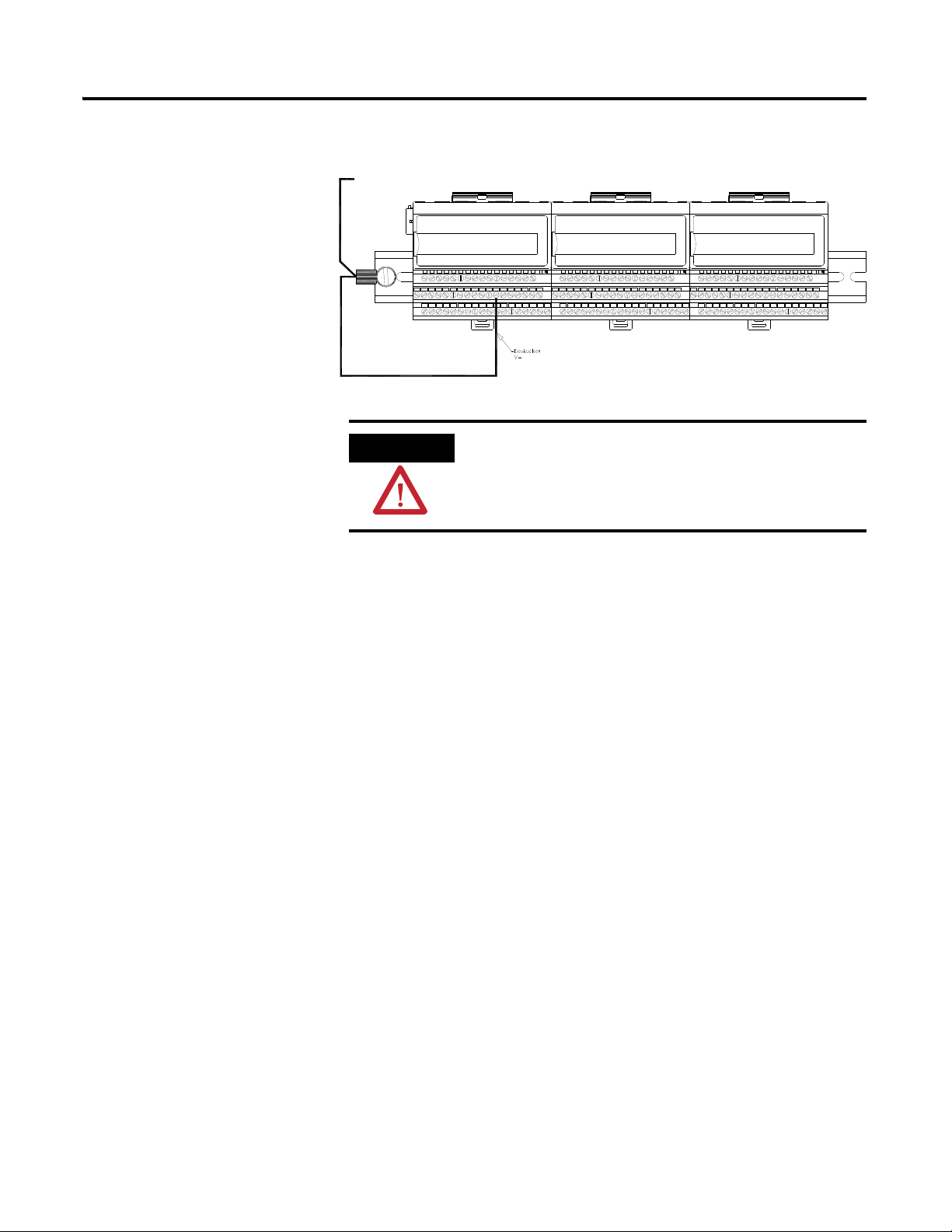
DIN Rail Mounting
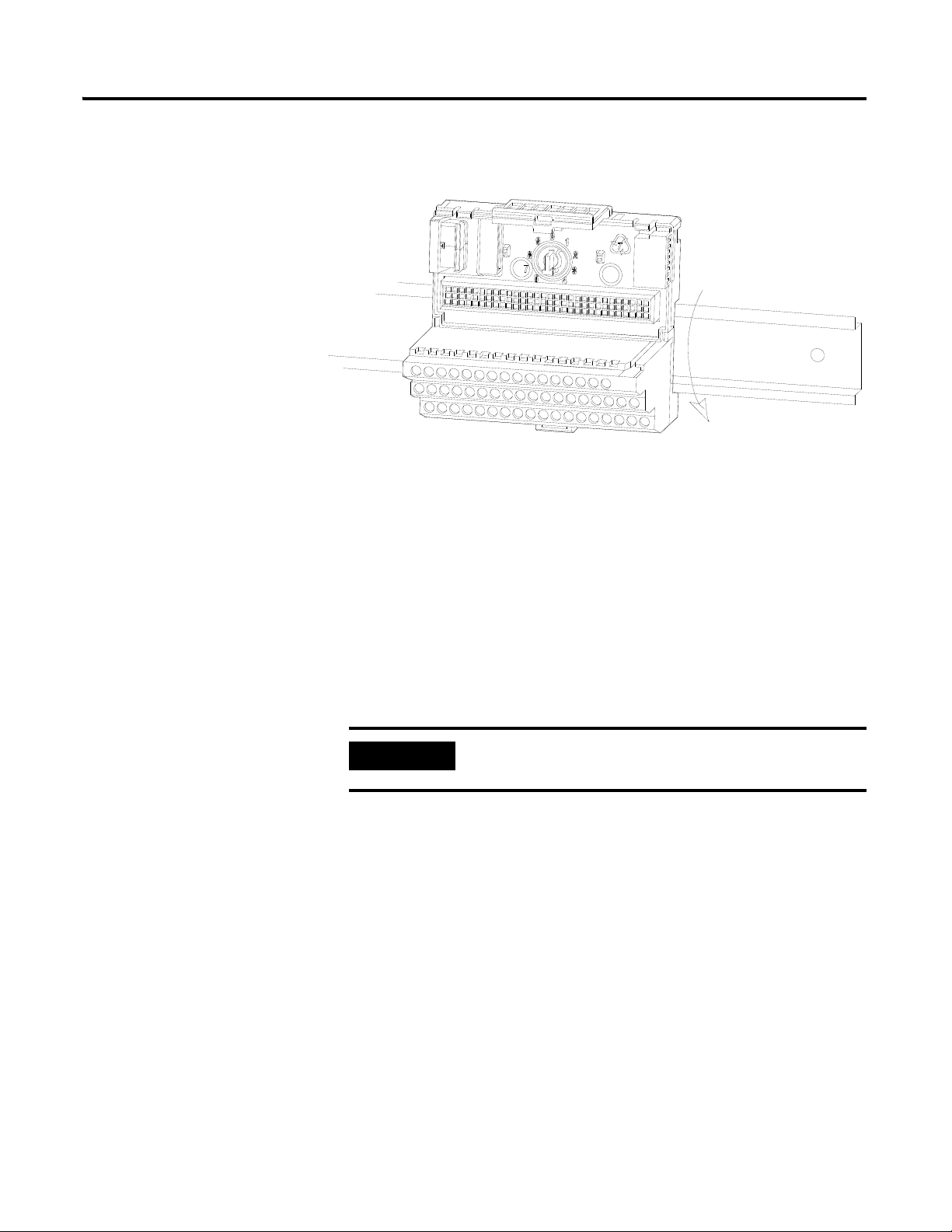
Use the steps below to mount the XM-941 terminal base unit on a DIN rail
(A-B pt no. 199-DR1 or 199-DR4).
1. Position the terminal base on the 35 x 7.5mm DIN rail (A).
2. Slide the terminal base unit over leaving room for the side
connector (B).
Publication GMSI10-UM005C-EN-P - May 2010
Page 25
Installing the XM-320 Position Module 17
IMPORTANT
3. Rotate the terminal base onto the DIN rail with the top of the rail
hooked under the lip on the rear of the terminal base.
4. Press down on the terminal base unit to lock the terminal base on the
DIN rail. If the terminal base does not lock into place, use a screwdriver
or similar device to open the locking tab, press down on the terminal
base until flush with the DIN rail and release the locking tab to lock the
base in place.
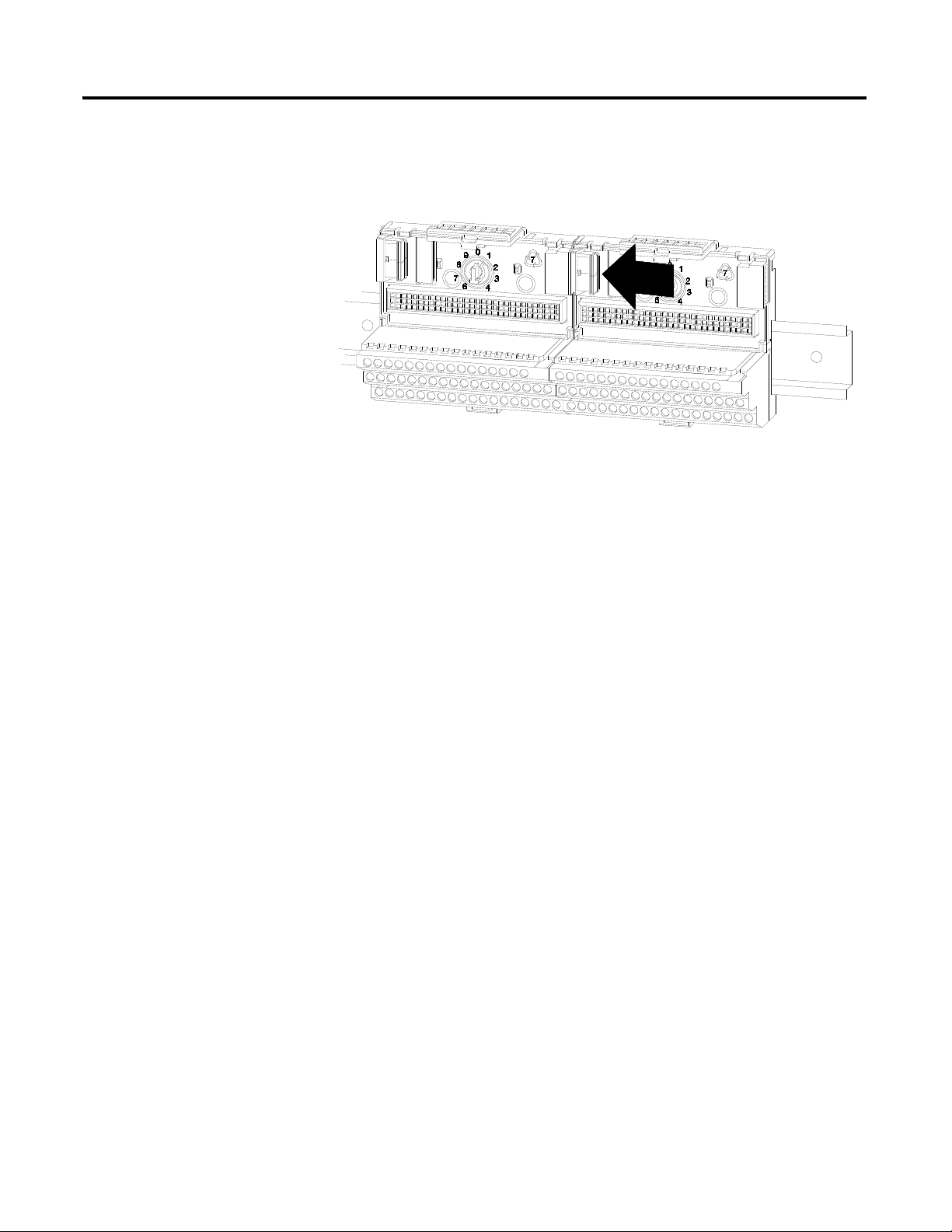
Interconnecting Terminal Base Units
Follow the steps below to install another terminal base unit on the DIN rail.
Make certain you install the terminal base units in order of
left to right.
1. Position the terminal base on the 35 x 7.5mm DIN rail (A).
2. Make certain the side connector (B) is fully retracted into the base unit.
3. Slide the terminal base unit over tight against the neighboring terminal
base. Make sure the hook on the terminal base slides under the edge of
the terminal base unit.
4. Press down on the terminal base unit to lock the terminal base on the
DIN rail. If the terminal base does not lock into place, use a screwdriver
or similar device to open the locking tab, press down on the terminal
base until flush with the DIN rail and release the locking tab to lock the
base in place.
Publication GMSI10-UM005C-EN-P - May 2010
Page 26
18 Installing the XM-320 Position Module
5. Gently push the side connector into the side of the neighboring terminal
base unit to complete the backplane connection.
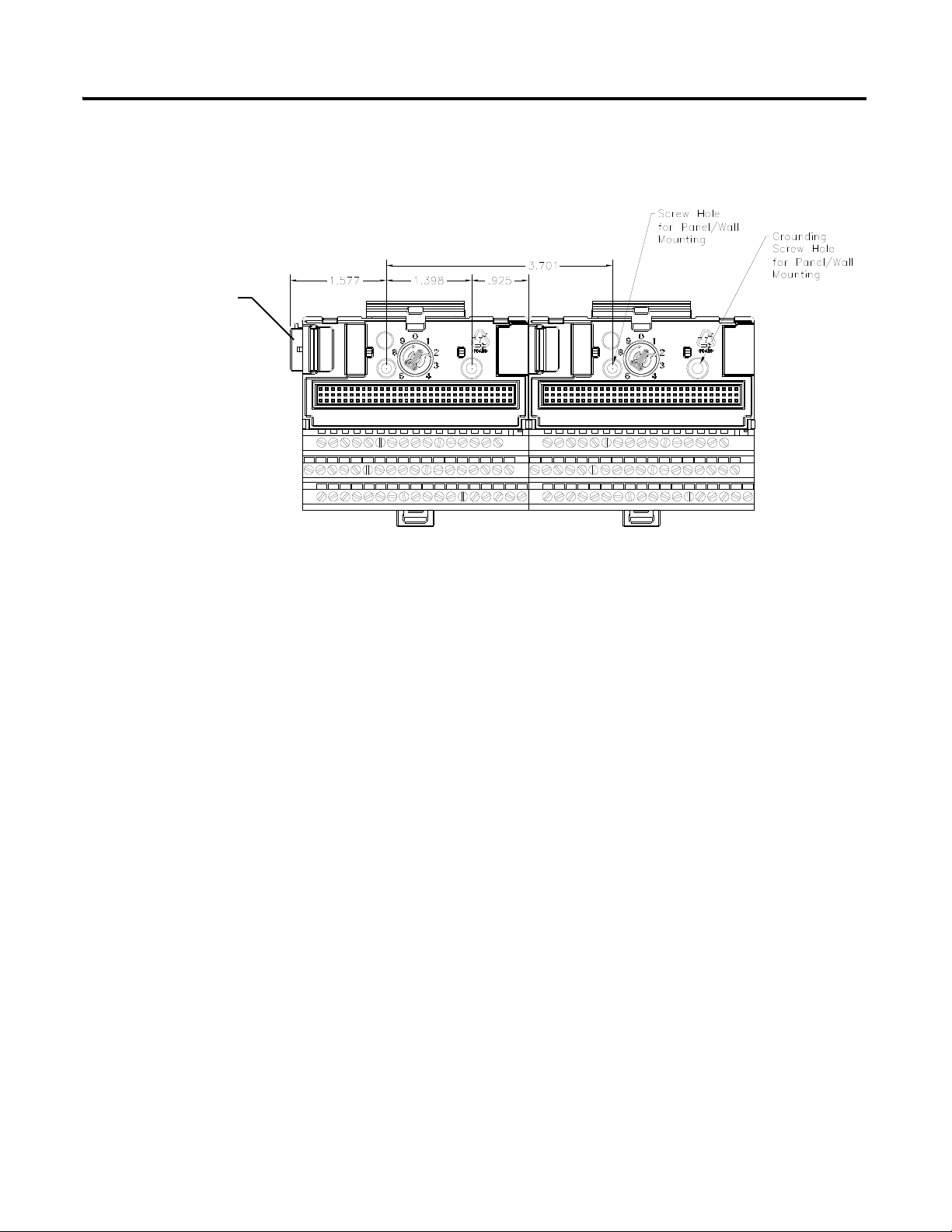
Panel/Wall Mounting
Installation on a wall or panel consists of:
• laying out the drilling points on the wall or panel
• drilling the pilot holes for the mounting screws
• installing the terminal base units and securing them to the wall or panel
Use the following steps to install the terminal base on a wall or panel.
Publication GMSI10-UM005C-EN-P - May 2010
Page 27
Installing the XM-320 Position Module 19
Side Connector
1. Lay out the required points on the wall/panel as shown in the drilling
dimension drawing below.
Connecting Wiring for Your Module
2. Drill the necessary holes for the #6 self-tapping mounting screws.
3. Secure the terminal base unit using two #6 self-tapping screws.
4. To install another terminal base unit, retract the side connector into the
base unit. Make sure it is fully retracted.
5. Position the terminal base unit up tight against the neighboring terminal
base. Make sure the hook on the terminal base slides under the edge of
the terminal base unit.
6. Gently push the side connector into the side of the neighboring terminal
base to complete the backplane connection.
7. Secure the terminal base to the wall with two #6 self-tapping screws.
Wiring to the module is made through the terminal base unit on which the
module mounts. The XM-320 is compatible only with the XM-941 terminal
base unit, Cat. No. 1440-TB-B.
Publication GMSI10-UM005C-EN-P - May 2010
Page 28
20 Installing the XM-320 Position Module
ATTENTION
WARNING
XM-941, Cat. No. 1440-TB-B
Figure 2.7 XM-941 Terminal Base Unit
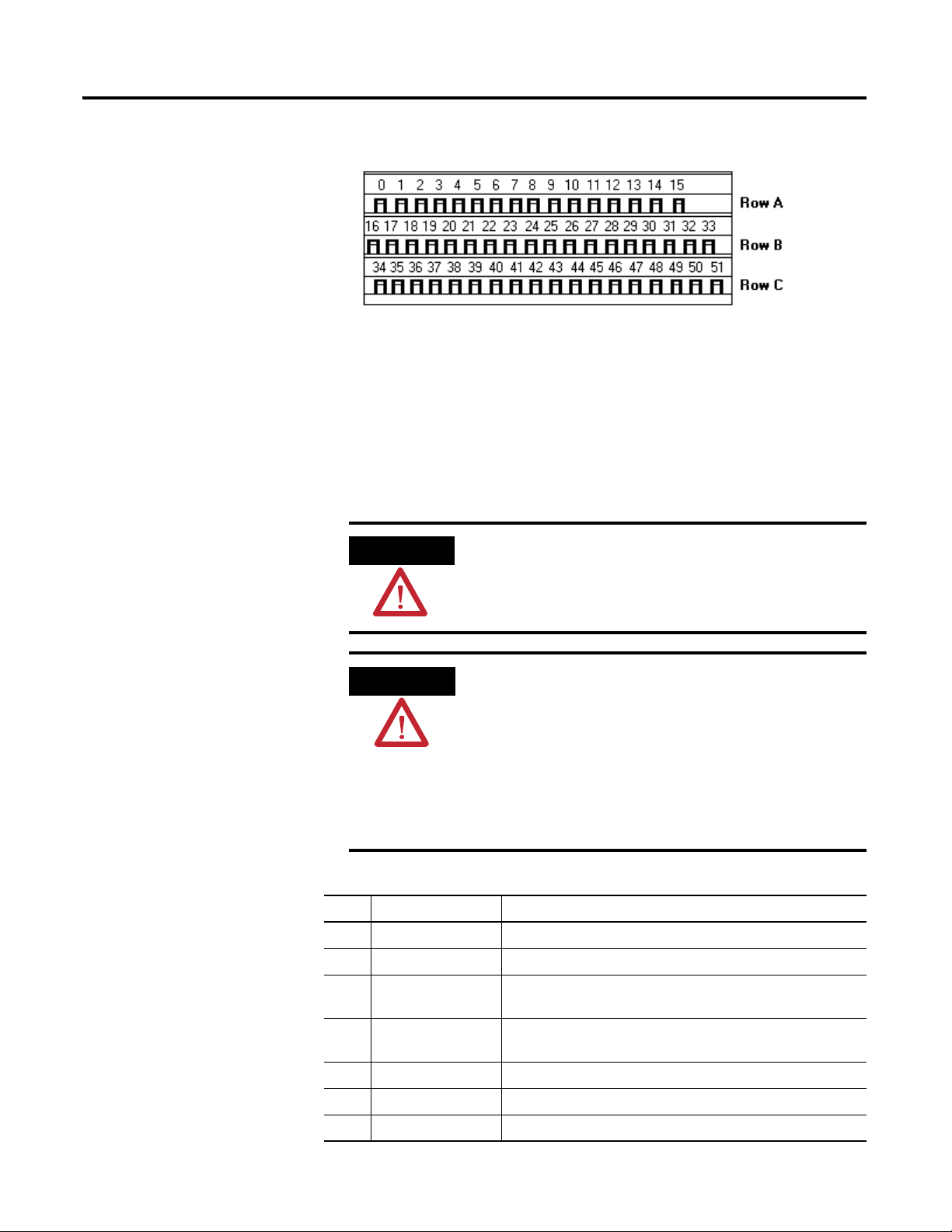
Terminal Block Assignments
The terminal block assignments and descriptions for the XM-320 module are
shown below.
Terminal Block Assignments
The terminal block assignments are different for different
XM modules. The following table applies only to the
XM-320. Refer to the installation instructions for the
specific XM module for its terminal assignments.
EXPLOSION HAZARD
Do not disconnect equipment unless power has been
removed or the area is known to be nonhazardous.
Do not disconnect connections to this equipment unless
power has been removed or the area is known to be
nonhazardous. Secure any external connections that mate
to this equipment by using screws, sliding latches, threaded
connectors, or other means provided with this product.
No. Name Description
0 Xducer 1 (+) Transducer 1 connection
1 Xducer 2 (+) Transducer 2 connection
2 Protected Output 1
(+)
3 Protected Output 2
(+)
Short Circuit Protected Output 1, positive side
Short Circuit Protected Output 2, positive side
4 No Connection
5 No Connection
6 Xducer V (+) Transducer power supply output, positive side
Publication GMSI10-UM005C-EN-P - May 2010
Page 29
Terminal Block Assignments
Installing the XM-320 Position Module 21
No. Name Description
7 TxD PC serial port, transmit data
8 RxD PC serial port, receive data
9 XRTN Circuit return for TxD and RxD
10 Chassis Connection to DIN rail ground spring or panel mounting hole
11 4-20mA 1 (+) 4-20mA output
12 4-20mA 1 (-)
600 ohm maximum load
13 Chassis Connection to DIN rail ground spring or panel mounting hole
14 Chassis Connection to DIN rail ground spring or panel mounting hole
15 Chassis Connection to DIN rail ground spring or panel mounting hole
16 Xducer 1 (-) Transducer 1 connection
17 Xducer 2 (-) Transducer 2 connection
18 Protected Output 1
Short Circuit Protected Output 1, negative side
(-)
19 Protected Output 2
Short Circuit Protected Output 2, negative side
(-)
20 No Connection
21 No Connection
22 Xducer V (-) Transducer power supply output, negative side
23 CAN_High DeviceNet bus connection, high differential (white wire)
24 CAN_Low DeviceNet bus connection, low differential (blue wire)
25 +24V Out Internally connected to 24V In (terminal 44)
Used to daisy chain power if XM modules are not plugged into
each other
26 DNet V (+) DeviceNet bus power input, positive side (red wire)
27 DNet V (-) DeviceNet bus power input, negative side (black wire)
28 24V Common Internally connected to 24V Common (terminals 43 and 45)
Used to daisy chain power if XM modules are not plugged into
each other
29 4-20mA 2 (+) 4-20mA output
30 4-20mA 2 (-)
600 ohm maximum load
31 Chassis Connection to DIN rail ground spring or panel mounting hole
32 Chassis Connection to DIN rail ground spring or panel mounting hole
33 Chassis Connection to DIN rail ground spring or panel mounting hole
34 Chassis Connection to DIN rail ground spring or panel mounting hole
35 Chassis Connection to DIN rail ground spring or panel mounting hole
36 Chassis Connection to DIN rail ground spring or panel mounting hole
37 Chassis Connection to DIN rail ground spring or panel mounting hole
38 Chassis Connection to DIN rail ground spring or panel mounting hole
Publication GMSI10-UM005C-EN-P - May 2010
Page 30
22 Installing the XM-320 Position Module
-
24V dc
Power
Supply
+
-
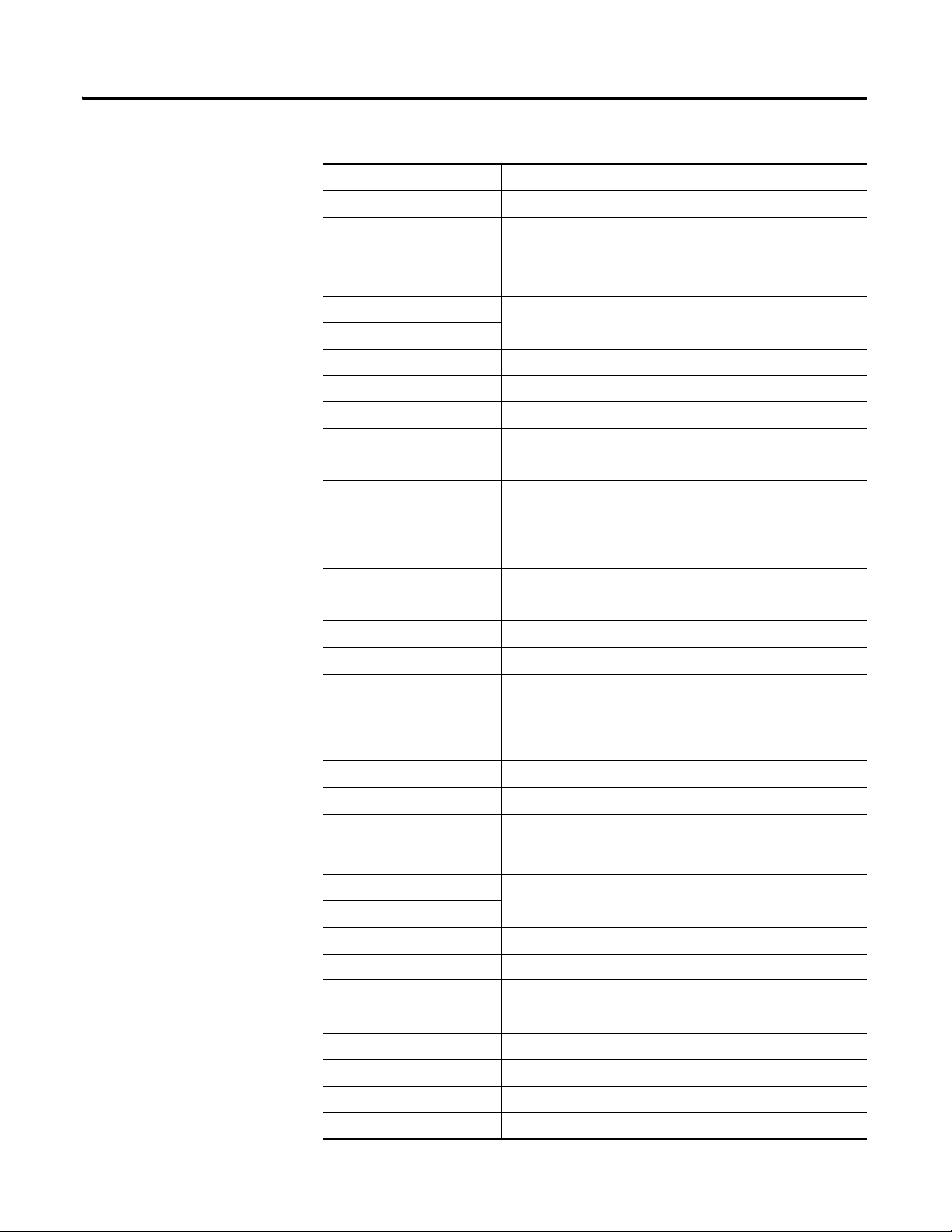
Terminal Block Assignments
No. Name Description
39 SetPtMult Switch input to activate Set Point Multiplication (active closed)
40 Switch RTN Switch return, shared between SetPtMult and Reset Relay
41 Reset Relay Switch input to reset internal relay (active closed)
42 Reserved
43 24V Common Internally DC-coupled to circuit ground
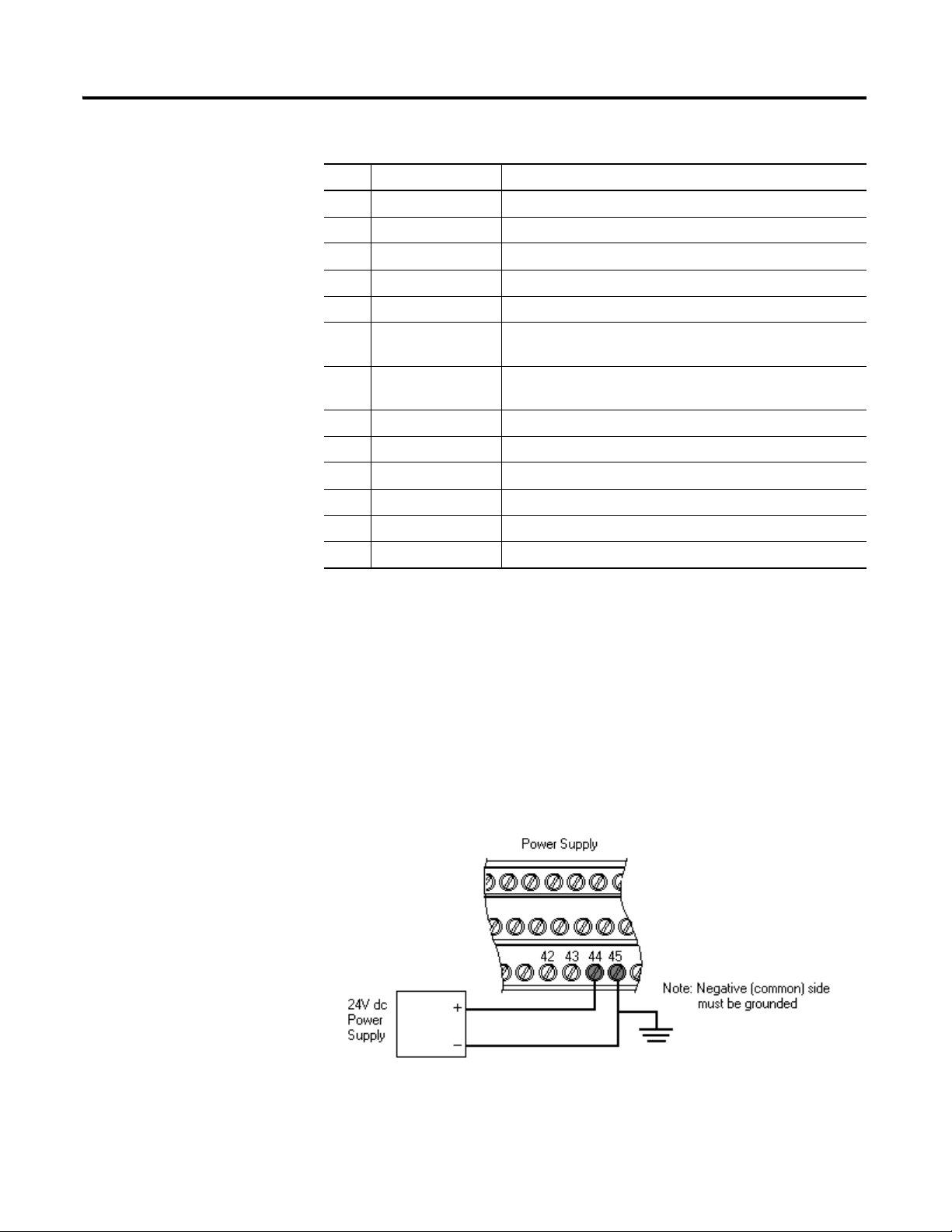
44 +24V In Connection to primary external +24V power supply, positive
side
45 24V Common Connection to external +24V power supply, negative side
(internally DC-coupled to circuit ground)
46 Relay N.C. 1 Relay Normally Closed contact 1
47 Relay Common 1 Relay Common contact 1
48 Relay N.O. 1 Relay Normally Open contact 1
49 Relay N.O. 2 Relay Normally Open contact 2
50 Relay Common 2 Relay Common contact 2
51 Relay N.C. 2 Relay Normally Closed contact 2
Connecting the Power Supply
Power supplied to the module must be nominally 24 Vdc (±10%) and must be
a Class 2 rated circuit.
Wire the DC-input power supply to the terminal base unit as shown in Figure
2.8.
Figure 2.8 DC Input Power Supply Connections
Publication GMSI10-UM005C-EN-P - May 2010
Page 31

Installing the XM-320 Position Module 23
IMPORTANT
IMPORTANT
ATTENTION
IMPORTANT
TIP
A Class 2 circuit can be provided by use of an NEC Class 2
rated power supply, or by using a SELV or PELV rated
power supply with a 5 Amp current limiting fuse installed
before the XM module(s).
24Vdc needs to be wired to terminal 44 (+24 V In) to
provide power to the device and other XM modules linked
to the wired terminal base via the side connector.
The power connections are different for different XM
modules. Refer to the installation instructions for your
specific XM module for complete wiring information.
Connecting the Relays
The XM-320 has both Normally Open (NO) and Normally Closed (NC) relay
contacts. Normally Open relay contacts close when the control output is
energized. Normally Closed relay contacts open when the control output is
energized.
The alarms associated with the relay and whether the relay is normally
de-energized (non-failsafe) or normally energized (failsafe) depends on the
configuration of the module. Refer to Relay Parameters on page 58 for details.
Table 2.1 shows the on-board relay connections for the XM-320.
All XM relays are double pole. This means that each relay
has two contacts in which each contact operates
independently but identically. The following information
and illustrations show wiring solutions for both contacts;
although, in many applications it may be necessary to wire
only one contact.
The Expansion Relay module may be connected to the
XM-320 to provide additional relays. Refer to the XM-441
Expansion Relay Module User Guide for wiring details.
Publication GMSI10-UM005C-EN-P - May 2010
Page 32

24 Installing the XM-320 Position Module
IMPORTANT
The NC/NO terminal descriptions (page 22) correspond
T
to a de-energized (unpowered) relay.
When the relay is configured for non-failsafe operation, the
relay is normally de-energized.
When the relay is configured for failsafe operation, the
relay is normally energized, and the behavior of the NC and
NO terminals is inverted.
Table 2.1 Relay Connections for XM-320
Configured for
Failsafe Operation Relay 1 Terminals
Nonalarm Alarm Wire Contacts Contact 1 Contact 2
Closed Opened COM 47 50
NO 48 49
Opened Closed COM 47 50
NC 46 51
Configured for
Non-failsafe Operation Relay 1 Terminals
Nonalarm Alarm Wire Contacts Contact 1 Contact 2
Closed Opened COM 47 50
NC 46 51
Opened Closed COM 47 50
NO 48 49
Figures 2.9 and 2.10 illustrate the behavior of the NC and NO terminals when
the relay is wired for failsafe, alarm or nonalarm condition or non-failsafe,
alarm or nonalarm condition.
Publication GMSI10-UM005C-EN-P - May 2010
Page 33

Installing the XM-320 Position Module 25
Figure 2.9 Relay Connection - Failsafe, Nonalarm Condition
Non-failsafe, Alarm Condition
Figure 2.10 Relay Connection - Failsafe, Alarm Condition
Non-failsafe, Nonalarm Condition
Alternate Relay Wiring
Figures 2.11 and 2.12 show how to wire both ends of a single external
indicator to the XM terminal base for failsafe, nonalarm or alarm condition, or
non-failsafe, nonalarm or alarm condition.
Publication GMSI10-UM005C-EN-P - May 2010
Page 34

26 Installing the XM-320 Position Module
Figure 2.11 Relay Connection - Failsafe, Nonalarm Condition
Non-failsafe, Alarm Condition
Figure 2.12 Relay Connection - Failsafe, Alarm Condition
Non-failsafe, Nonalarm Condition
Publication GMSI10-UM005C-EN-P - May 2010
Connecting the Short Circuit Protected Output
The XM-320 provides short circuit protected outputs of all transducer input
signals. The protected output connections may be used to connect the module
to portable data collectors or other online systems.
Figure 2.13 shows the short circuit protected output connections for the
XM-320.
Page 35

Installing the XM-320 Position Module 27
TIP
TIP
Figure 2.13 Short Circuit Protected Output Connections
Connecting the Remote Relay Reset Signal
If you set the module relay to latching and the relay activates, the relay stays
activated even when the condition that caused the alarm has ended. The
remote relay reset signal enables you to reset your module relay remotely after
you have corrected the alarm condition. This includes latched relays in the
Expansion Relay module when it is attached to the XM-320.
You can discretely reset a relay using the serial or remote
configuration tool.
If you set a module relay to latching, make sure that any
linked relays, such as relays in an XM-440 Master Relay
Module, are not configured as latching. When both relays
are set to latching, the relay in each module will have to be
independently reset when necessary.
Wire the Remote Relay Reset Signal to the terminal base unit as shown in
Figure 2.14.
Publication GMSI10-UM005C-EN-P - May 2010
Page 36

28 Installing the XM-320 Position Module
ATTENTION
ATTENTION
Figure 2.14 Remote Relay Reset Signal Connection
The Switch Input circuits are functionally isolated from
other circuits. It is recommended that the Switch RTN
signal be grounded at a signal point. Connect the Switch
RTN signal to the XM terminal base (Chassis terminal) or
directly to the DIN rail, or ground the signal at the switch
or other equipment that is wired to the switch.
A single switch contact can also be shared by multiple XM modules wired in
parallel as shown in Figure 2.15.
The relay reset connections may be different for different
XM modules. Figure 2.15 applies only to the XM-320
module. Refer to the installation instructions for the
module for its terminal assignments.
Figure 2.15 Typical Multiple XM Modules Remote Relay Reset Signal Connection
Publication GMSI10-UM005C-EN-P - May 2010
Page 37

Installing the XM-320 Position Module 29
ATTENTION
Connecting the Setpoint Multiplication Switch
You can configure the module to multiply the alarm setpoints, or inhibit the
alarms during the start-up period. This can be used to avoid alarm conditions
that may occur during startup, for example, when the monitored machine
passes through a critical speed.
Wire the Setpoint Multiplication switch to the terminal base unit as shown in
Figure 2.16.
Figure 2.16 Setpoint Multiplication Connection
The Switch Input circuits are functionally isolated from
other circuits. It is recommended that the Switch RTN
signal be grounded at a signal point. Connect the Switch
RTN signal to the XM terminal base (Chassis terminal) or
directly to the DIN rail, or ground the signal at the switch
or other equipment that is wired to the switch.
Connecting the 4-20mA Outputs
The module includes an isolated 4-20mA per channel output into a maximum
load of 600 ohms. The measurements that the 4-20mA output tracks and the
signal levels that correspond to the 4mA and 20mA are configurable. Refer
to 4-20mA Output Parameters on page 62 for a description of the 4-20mA
parameters.
Wire the 4-20mA outputs to the terminal base unit as shown in Figure 2.17.
Publication GMSI10-UM005C-EN-P - May 2010
Page 38

30 Installing the XM-320 Position Module
ATTENTION
ATTENTION
Figure 2.17 4-20mA Output Connections
The 4-20mA outputs are functionally isolated from other
circuits. It is recommended that the outputs be grounded at
a single point. Connect the 4-20mA (-) to the XM terminal
base (Chassis terminal) or directly to the DIN rail, or
ground the signal at the other equipment in the 4-20mA
loop.
Connecting the Transducer
The XM-320 will accept signals from a linear variable differential transformer
(LVDT), non-contact eddy current probe, or a rotary cam (valve)
potentiometer.
Connecting a Non-contact Sensor
The following figures show the wiring from a non-contact sensor to the
terminal base unit of the XM-320 module.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the XM-320
terminal base and not at the transducer. Any convenient
Chassis terminal may be used (see Terminal Block
Assignments on page 20).
Publication GMSI10-UM005C-EN-P - May 2010
Page 39

Installing the XM-320 Position Module 31
TYPICAL WIRING FOR NON-CONTACT SENSOR
TO XM-320 POSITION MODULE CHANNEL 1
COM
SIG
-24
Channel 1 Input Signal
-24V DC
0
16
22
6
Signal Common
Shield
Floating
37
Shield
Isolated Sensor Driver
43
TYPICAL WIRING FOR NON-CONTACT SENSOR
TO XM-320 POSITION MODULE CHANNEL 2
COM
SIG
-24
Shield
Channel 2 Input Signal
-24V DC
1
17
22
6
Signal Common
Shield
Floating
38
Isolated Sensor Driver
43
* See note
Note: If connecting non-contact sensors to both channels 1 and 2, install jumper between
terminals 17 and 43 instead of terminals 17 and 6 in order to limit wires to two per terminal.
Figure 2.18 Non-contact sensor to channel 1 wiring
Figure 2.19 Non-contact sensor to channel 2 wiring
Publication GMSI10-UM005C-EN-P - May 2010
Page 40

32 Installing the XM-320 Position Module
ATTENTION
0
16
22
6
Signal Ground
+24V DC
Power Ground
Channel 1 Input Signal
Signal Ground
TYPICAL WIRING FOR LINEAR VARIABLE DIFFERENTIAL
TRANSFORMER (LVDT) TO XM-320 POSITION MODULE CHANNEL 1
Power Ground
Input Signal
+24V DC
Cable shield not
connected at this
end
37
Shield
43
Connecting an LVDT
The following figures show the wiring from a linear variable differential
transformer (LVDT) to the terminal base unit of the XM-320.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the XM-320
terminal base and not at the transducer. Any convenient
Chassis terminal may be used (see Terminal Block
Assignments on page 20).
Figure 2.20 LVDT to channel 1 wiring
Publication GMSI10-UM005C-EN-P - May 2010
Page 41

Figure 2.21 LVDT to channel 2 wiring
1
17
22
6
Signal Ground
+24V DC
Power Ground
Channel 2 Input Signal
Signal Ground
TYPICAL WIRING FOR LINEAR VARIABLE DIFFERENTIAL
TRANSFORMER (LVDT) TO XM-320 POSITION MODULE CHANNEL 2
Power Ground
Input Signal
+24V DC
Cable shield not
connected at this
end
38
Shield
43
ATTENTION
Installing the XM-320 Position Module 33
Connecting a Cam Potentiometer
The following figures show the wiring from a cam potentiometer to the
terminal base unit of the XM-320.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the XM-320
terminal base and not at the transducer. Any convenient
Chassis terminal may be used (see Terminal Block
Assignments on page 20).
Publication GMSI10-UM005C-EN-P - May 2010
Page 42

34 Installing the XM-320 Position Module
TYPICAL WIRING FOR CAM (VALVE) POTENTIOMETER
TO XM-320 POSITION MODULE CHANNEL 1
Signal
Common
+24V DC
Channel 1
Input Signal
0
16
22
6
Channel 1 Input Signal
Signal Common
+24V DC
Cable shield
not connected
at this end
37
Shield
28
TYPICAL WIRING FOR CAM (VALVE) POTENTIOMETER
TO XM-320 POSITION MODULE CHANNEL 2
Signal
Common
+24V DC
Channel 2
Input Signal
1
17
22
6
Channel 2 Input Signal
Signal Common
+24V DC
Cable shield
not connected
at this end
38
Shield
28
* See note
Note: If connecting cam potentiometers to both channels 1 and 2, install jumper between
terminals 17 and 28 instead of terminals 17 and 22 in order to limit wires to two per terminal.
Figure 2.22 Cam potentiometer to channel 1 wiring
Figure 2.23 Cam potentiometer to channel 2 wiring
Publication GMSI10-UM005C-EN-P - May 2010
Page 43

Installing the XM-320 Position Module 35
ATTENTION
IMPORTANT
Connecting a Non-contact Sensor and an LVDT
The figure below shows the wiring of a non-contact sensor to channel 1 and
an LVDT to channel 2 of the XM-320.
You may ground the cable shield at either end of the cable.
Do not ground the shield at both ends. Recommended
practice is to ground the cable shield at the XM-320
terminal base and not at the transducer. Any convenient
Chassis terminal may be used (see Terminal Block
Assignments on page 20).
The +24V LVDT powered from pin 25 does not utilize
the redundant power connection to the XM-320. So if
primary 24V power is lost, the +24V sensor will lose power
regardless of whether the XM-320 remains powered
through the redundant power terminals.
If redundant power is required then use a redundant power
supply (Allen-Bradley 1606-series is recommended).
Publication GMSI10-UM005C-EN-P - May 2010
Page 44

36 Installing the XM-320 Position Module
0
16
22
6
Signal Ground
TYPICAL WIRING FO R NON-CONTACT SENSOR AND LINEAR VARIABLE
DIFFERENTIAL TRANSFORMER (LVDT) TO XM-320 POSITION MODULE
Power Ground
Input Signal
+24V DC
S
I
G
-
2
4
COM
Shield
Channel 1 Input Signal
-24V DC
Signal Common
17
1
25
28
Signal Ground
Channel 2 Input Signal
+24V DC
Power Ground
Cable shield not
connected at this
end
Shield Floating
37
Shield
Isolated Sensor Driver
38
Figure 2.24 Non-contact sensor and LVDT wiring
PC Serial Port Connection
The XM-320 includes a serial port connection that allows you to connect a PC
to it and configure the module’s parameters. There are two methods of
connecting an external device to the module’s serial port.
• Ter mi nal Bas e Un it - There are three terminals on the terminal base
unit you can use for the serial port connection. They are TxD, RxD, and
RTN (terminals 7, 8, and 9, respectively). If these three terminals are
wired to a DB-9 female connector, then a standard RS-232 serial cable
with 9-pin (DB-9) connectors can be used to connect the module to a
PC (no null modem is required).
Publication GMSI10-UM005C-EN-P - May 2010
Page 45

Installing the XM-320 Position Module 37
POSITION
1440-TPS02-01RB
mini-connector
WARNING
IMPORTANT
The DB-9 connector should be wired to the terminal base unit as
follows.
XM-320 Terminal Base Unit
(Cat. No. 1440-TB-B)
TX Terminal (terminal 7) ---------------------- Pin 2 (RD - receive data)
RX Terminal (terminal 8) ---------------------- Pin 3 (TD - transmit data)
RTN Terminal (terminal 9) --------------------- Pin 5 (SG - signal ground)
DB-9 Female Connector
• Mini-Connector - The mini-connector is located on the top of the
XM-320, as shown below.
Figure 2.25 Mini Connector
A special cable (Cat. No. 1440-SCDB9FXM2) is required for this
connection. The connector that inserts into the PC is a DB-9 female
connector, and the connector that inserts into the module is a USB
Mini-B male connector.
If you connect or disconnect the serial cable with power
applied to the module or the serial device on the other end
of the cable, an electrical arc can occur. This could cause an
explosion in hazardous location installations. Be sure that
power is removed or the area is nonhazardous before
proceeding.
If 24V Common is not referenced to earth ground, we
recommend you use an RS-232 isolator, such as Phoenix
PSM-ME-RS232/RS232-P (Cat. No. 1440-ISO-232-24), to
protect both the XM module and the computer.
Publication GMSI10-UM005C-EN-P - May 2010
Page 46

38 Installing the XM-320 Position Module
IMPORTANT
ATTENTION
ATTENTION
DeviceNet Connection
The XM-320 includes a DeviceNet™ connection that allows the module to
communicate directly with a programmable controller, distributed control
system (DCS), or another XM module.
DeviceNet is an open, global, industry-standard communications network
designed to provide an interface through a single cable from a programmable
controller to a smart device such as the XM-320 module. As multiple XM
modules are interconnected, DeviceNet also serves as the communication bus
and protocol that efficiently transfers data between the XM modules.
Connect the DeviceNet cable to the terminal base unit as shown.
Connect To Terminal Base Unit
Red Wire DNet V+ 26 (optional—see note)
White Wire CAN High 23
Bare Wire Shield (Chassis) 10
Blue Wire CAN Low 24
Black Wire DNet V- 27
The DeviceNet power circuit through the XM module
interconnect, which is rated at only 300 mA, is not intended
or designed to power DeviceNet loads. Doing so could
damage the module or terminal base.
To preclude this possibility, even unintentionally, it is
recommended that DeviceNet V+ be left unconnected.
You must ground the DeviceNet shield at only one
location. Connecting the DeviceNet shield to terminal 10
will ground the DeviceNet shield at the XM-320 module. If
you intend to terminate the shield elsewhere, do not
connect the shield to terminal 10.
The DeviceNet network must also be referenced to earth at
only one location. Connect DNet V- to earth or chassis at
one of the XM modules.
Publication GMSI10-UM005C-EN-P - May 2010
Page 47

Installing the XM-320 Position Module 39
ATTENTION
IMPORTANT
IMPORTANT
ATTENTION
ATTENTION
The DNet V+ and DNet V- terminals are inputs to the XM
module. Do not attempt to pass DeviceNet power through
the XM terminal base to other non-XM equipment by
connecting to these terminals. Failure to comply may result
in damage to the XM terminal base and/or other
equipment.
Terminate the DeviceNet network and adhere to the
requirements and instructions in the ODVA Planning and
Installation Manual - DeviceNet Cable System, which is
available on the ODVA web site (http://www.odva.org).
The device is shipped from the factory with the network node address (MAC
ID) set to 63. The network node address is software settable. You can use the
XM Serial Configuration Utility or RSNetWorx for DeviceNet (Version 3.0 or
later) to set the network node address. Refer to the appropriate documentation
for details.
Mounting the Module
The baud rate for the XM-320 is set by way of “baud
detection” (Autobaud) at power-up.
The XM-320 mounts on the XM-941 terminal base unit, Cat. No. 1440-TB-B.
You should mount the module after you have connected the wiring on the
terminal base unit.
The XM-320 is compatible only with the XM-941 terminal
base unit. The keyswitch on the terminal base unit should
be at position 4 for the XM-320.
Do not attempt to install XM-320 modules on other
terminal base units.
Do not change the position of the keyswitch after
wiring the terminal base.
This module is designed so you can remove and insert it
under power. However, when you remove or insert the
module with power applied, I/O attached to the module
can change states due to its input/output signal changing
conditions. Take special care when using this feature.
Publication GMSI10-UM005C-EN-P - May 2010
Page 48

40 Installing the XM-320 Position Module
WARNING
IMPORTANT
When you insert or remove the module while power is on,
an electrical arc can occur. This could cause an explosion in
hazardous location installations. Be sure that power is
removed or the area is nonhazardous before proceeding.
Install the overlay slide label to protect serial connector and
electronics when the serial port is not in use.
1. Make certain the keyswitch (A) on the terminal base unit (C) is at
position 4 as required for the XM-320.
2. Make certain the side connector (B) is pushed all the way to the left. Yo u
cannot install the module unless the connector is fully extended.
3. Make sure that the pins on the bottom of the module are straight so they
will align properly with the connector in the terminal base unit.
4. Position the module (D) with its alignment bar (E) aligned with the
groove (F) on the terminal base.
5. Press firmly and evenly to seat the module in the terminal base unit. The
module is seated when the latching mechanism (G) is locked into the
module.
6. Repeat the above steps to install the next module in its terminal base.
Publication GMSI10-UM005C-EN-P - May 2010
Page 49

Installing the XM-320 Position Module 41
POSITION
1440-TPS02-01RB
Module Indicators
Module Indicators
The XM-320 has six LED indicators, which include a module status (MS)
indicator, a network status (NS) indicator, a status indicator for each channel
(CH1 and CH2), an activation indicator for the Setpoint Multiplier, and a
status indicator for the Relay. The LED indicators are located on top of the
module.
Figure 2.26 LED Indicators
The following tables describe the states of the LED status indicators.
Module Status (MS) Indicator
Color State Description
No color Off No power applied to the module.
Green Flashing Red Module performing power-up self test.
Flashing
Solid
Module operating in Program Mode
Module operating in Run Mode
Red Flashing • Application firmware is invalid or not loaded.
Download firmware to the module.
• Firmware download is currently in progress.
• The module power voltage is incorrect.
1
.
2
.
Solid An unrecoverable fault has occurred. The module may
need to be repaired or replaced.
1 Program Mode - Typically this occurs when the module configuration settings are being updated with the XM
Serial Configuration Utility. In Program Mode, the module does not perform its usual functions. The signal
processing/measurement process is stopped, and the status of the alarms is set to the disarm state to prevent
a false alert or danger status.
2 Run Mode - In Run Mode, the module collects measurement data and monitors each measurement device.
Publication GMSI10-UM005C-EN-P - May 2010
Page 50

42 Installing the XM-320 Position Module
Network Status (NS) Indicator
Color State Description
No color Off Module is not online.
• Module is autobauding.
• No power is applied to the module, look at Module
Status LED.
Green Flashing Module is online (DeviceNet) but no connections are
currently established.
Solid Module is online with connections currently
established.
Red Flashing One or more I/O connections are in the timed-out state.
Solid Failed communications (duplicate MAC ID or Bus-off).
1 Normal condition when the module is not a slave to an XM-440, PLC, or other master device.
1
Channel 1 and Channel 2 Status Indicators
Color State Description
No Color Off • Normal operation within alarm limits on the channel.
• No power applied to the module, look at Module
Status LED.
Yellow Solid An alert level alarm condition exists on the channel
(and no transducer fault or danger level alarm condition
exists).
Red Solid A danger level alarm condition exists on the channel
(and no transducer fault condition exists).
Flashing A transducer fault condition exists on the channel.
Setpoint Multiplier Indicator
Color State Description
Yellow Off Setpoint multiplier is not in effect.
Solid Setpoint multiplier is in effect.
Relay Indicator
Color State Description
Publication GMSI10-UM005C-EN-P - May 2010
Red Off On-board relay is not activated.
Solid On-board relay is activated.
Page 51

Installing the XM-320 Position Module 43
POSITION
1440-TPS02-01RB
Press the Reset
Switch to reset the
relays
Basic Operations
Powering Up the Module
The XM-320 performs a self-test at power-up. The self-test includes an LED
test and a device test. During the LED test, the indicators will be turned on
independently and in sequence for approximately 0.25 seconds.
The device test occurs after the LED test. The Module Status (MS) indicator is
used to indicate the status of the device self-test.
MS Indicator State Description
Flashing Red and Green Device self test is in progress.
Solid Green or Flashing Green Device self test completed successfully, and the
firmware is valid and running.
Flashing Red Device self test completed, the hardware is OK, but the
firmware is invalid. Or, the firmware download is in
progress.
Solid Red Unrecoverable fault, hardware failure, or Boot Loader
program may be corrupted.
Refer to Module Indicators on page 41 for more information about the LED
indicators.
Manually Resetting Relays
The XM-320 has an external reset switch located on top of the module, as
shown in Figure 2.27.
Figure 2.27 Reset Switch
Publication GMSI10-UM005C-EN-P - May 2010
Page 52

44 Installing the XM-320 Position Module
IMPORTANT
The switch can be used to reset all latched relays in the module. This includes
the relays in the Expansion Relay Module when it is connected to the XM-320.
The Reset switch resets the relays only if the input is no
longer in alarm or the condition that caused the alarm is no
longer present.
Publication GMSI10-UM005C-EN-P - May 2010
Page 53

Chapter
IMPORTANT
3
Configuration Parameters
This chapter provides a complete listing and description of the XM-320
parameters. The parameters can be viewed and edited using the XM Serial
Configuration Utility software and a personal computer. If the module is
installed on a DeviceNet network, configuring can also be performed using a
network configuration tool such as RSNetWorx (Version 3.0 or later). Refer to
your configuration tool documentation for instructions on configuring a
device.
For information about See page
Channel Parameters 46
Measurement Mode Parameter 49
Alarm Parameters 55
Relay Parameters 58
4-20mA Output Parameters 62
Triggered Trend Parameters 63
I/O Data Parameters 65
Data Parameters 66
Device Mode Parameters 68
The appearance and procedure to configure the parameters
may differ in different software.
45 Publication GMSI10-UM005C-EN-P - May 2010
Page 54

46 Configuration Parameters
TIP
Eng. Units Output Data
Unit Options
mils mils
mm
mm mm
mils
deg deg
Channel Parameters
The Channel parameters define the characteristics of the transducers you will
be using with the XM-320. Use the parameters to configure the transducer
sensitivity, operating range, power requirements, measurement mode, and
calibration offset. There are two instances of the parameters, one for each
channel.
The Channel LED will flash red when a transducer fault
condition exists on a channel even if you are not using the
channel. You can keep the Channel LED from flashing red
on unused channels by setting the channel’s Fault High
and Fault Low to greater than zero and less than zero,
respectively. For example, set Fault High to +18 volts and
set Fault Low to -18 volts.
Channel Parameters
Parameter Name Description Values/Comments
Channel Name (XM Serial
Configuration Utility only)
Sensitivity The sensitivity of the transducer in millivolts per
Eng. Units Defines the native units of the transducer. Your
Output Data Unit The data units of the measured values. The available options depend on the
A descriptive name to help identify the channel in
the XM Serial Configuration Utility.
Eng. Units.
choice controls the list of possible selections
available in the Output Data Units parameter. It
also affects other module parameters, for example
the Alert and Danger Threshold, Measurement
Value, 4–20 mA Output.
Maximum 18 characters
This value can be found on the
transducer’s data sheet.
Options: mils (1/1000 inch)
mm (millimeter)
degrees
%
Eng. Units selection.
Fault High The maximum expected DC bias voltage from the
Fault Low The minimum, or most negative, expected DC bias
Publication GMSI10-UM005C-EN-P - May 2010
transducer.
voltage from the transducer.
Volts
Note: A voltage reading outside this
range constitutes a transducer fault.
Page 55

Configuration Parameters 47
Time Constant
(seconds)
-3dB Frequency
(Hz)
Settling
(seconds)
1 0.159 2.2
2 0.080 4.4
3 0.053 6.6
4 0.040 8.8
5 0.032 11
6 0.027 13.2
7 0.023 15.4
8 0.020 17.6
9 0.018 19.8
10 0.016 22
Channel Parameters
Parameter Name Description Values/Comments
DC Bias Time Constant
The time constant used for exponential averaging
Seconds
(low pass filtering) of the transducer DC bias
measurement. The corner frequency for the low pass
filter is 1 / (2
π x DC Bias Time Constant). The
greater the value entered, the longer the settling
time of the measured value to a change in the input
signal. See example table below.
Target Angle Sets the angle between the shaft and the target
Upscale Sets the movement of the target relative to the
Calibration Offset (XM Serial
Configuration Utility only)
surface. The target surface moves with the shaft.
The transducer is mounted perpendicular to the
target surface.
transducer that is considered positive displacement.
Enter the position of the current Transducer DC
Bias reading.
degrees
Options: Away
Toward s
mils
Publication GMSI10-UM005C-EN-P - May 2010
Page 56

48 Configuration Parameters
Channel Parameters
Parameter Name Description Values/Comments
Calibration Bias Sets the zero or green position. The zero position is
Volts
the normal operating position. Setting the zero
position compensates for the static gap. This allows
the module to display only the displacement around
the zero position.
Note: Check with the manufacturer
about operating thrust position and
acceptable tolerances before making
any adjustments.
Use one of the formulas below to calculate the
Calibration Bias. The formula that you use depends
on the Upscale setting and whether Fault High and
Fault Low are both less than or equal to zero (0).
Calculate Bias (XM Serial
Configuration Utility only)
Upscale
set to “Towards” Formula
Calibration bias = Transducer DC Bias +
(Sensitivity x Calibration Offset) x sin (Target
Angle)
Upscale
set to “Away” Formula
Calibration Bias = Transducer DC Bias (Sensitivity x Calibration Offset) x sin (Target
Angle)
If Fault High and Fault Low are both less than or
equal to 0, use one of these formulas:
Upscale
set to “Towards” Formula
Calibration bias = Transducer DC Bias (Sensitivity x Calibration Offset) x sin (Target
Angle)
Upscale
set to “Away” Formula
Calibration Bias = Transducer DC Bias +
(Sensitivity x Calibration Offset) x sin (Target
Angle)
Automatically calculates the Calibration Bias
value.
Publication GMSI10-UM005C-EN-P - May 2010
Page 57

Configuration Parameters 49
XM
Configuration
Utility
EDS File
Mode Measurement
Mode
Measurement Mode
The Measurement Mode parameter controls how the two axial sensors are
used to calculate the position measurement. Use this parameter to configure
Parameter
Measurement Mode
Parameter Name Description Values/Comments
the mode of operation.
Select the mode of the two axial sensors.
• Normal - The two sensors are used independently
to perform two separate position measurements.
See page 49 for more information about this mode.
• Head-to-Head - The two sensors are used
together, facing each other on either side of the
target, to perform a single position measurement.
This mode can be used to extend the measurable
range beyond that of a single sensor. See page 51
for more information about this mode.
• Radial Cancel - The two sensors are used
together to perform a single position
measurement. The second sensor is set up to
measure the radial movement of the target. The
radial movement is then subtracted from the
position measurement performed by the first
sensor. See page 54 for more information about
this mode.
Options: Normal
Head-to-Head
Radial Cancel
Normal Mode
In normal mode the module behaves as a two channel differential unit with the
probes mounted on the casing and measuring the shaft position relative to the
casing. Positioning of probes is critical to ensure that valid shaft movement
cannot at any time damage the probes. Selection of probe type and range is
obviously important. The static gaps of the probes are automatically
subtracted from the measurement in order that the system can measure small
movements relative to the total gaps.
When using this mode, the module uses straight targets, angled targets, or
mixed target types, as shown in Figure 3.1.
Publication GMSI10-UM005C-EN-P - May 2010
Page 58

50 Configuration Parameters
IMPORTANT
NORMAL MODE
(straight targets)
(angled targets)
(mixed targets)
Figure 3.1 Normal Mode
The XM-320 provides monitoring facilities for the following machine
measurements when in normal mode.
• Axial (thrust) Position
• Differential Expansion
• Case Expansion
• Valve Position
For the valve position measurement, Sensitivity must be
set to "deg."
Publication GMSI10-UM005C-EN-P - May 2010
Page 59

Configuration Parameters 51
TIP
HEAD TO HEAD MODE
(one target)
(two targets)
Head-To-Head Mode
The head-to-head mode allows extended range operation by using two probes
in a “back to back” arrangement shown in the illustration in Figure 3.2. This
mode can be used when the machine does not have enough space for larger
diameter probes. It is not necessary for the scales to be symmetrical in this
mode, and probes of different voltage sensitivities can be used within the one
module.
Figure 3.2 Head-to-Head Mode
In head-to-head mode, the XM-320 provides monitoring facilities for
complementary differential expansion measurements.
In head-to-head mode, all position measurements are
stored in channel 1.
Head-to-Head Example
This head-to-head application measures a total displacement of 1000 mils on a
shaft collar using two 500 mil probes with a standard sensitivity of 30mV/mil
(or 0.030V/mil). See Figure 3.3.
Publication GMSI10-UM005C-EN-P - May 2010
Page 60

52 Configuration Parameters
Note: The direction of differential growth for an upscale reading is away from Probe A and towards
Probe B.
IMPORTANT
Figure 3.3 Head-to-Head Mode
The chart below shows gap-to-instrument reading-to-voltage outputs for
typical 500 mil transducers with an offset of 150 mils. Note that the offset gap
of a transducer is the gap closest to the transducer where the transducer’s
response to gap change becomes non-linear and not useful for measurement.
Probe A Probe B
Gap
150 0 -2.8 150 0 -3
250 100 -5.8 250 100 -6
400 250 -10.3 400 250 -10.5
550 400 -14.8 550 400 -15
650 500 -17.8 650 500 -18
Reading Voltage Gap Reading Voltage
Make certain the shaft is in its correct cold position or
compensate for the actual shaft axial position if it is known.
You can put the shaft into position by mechanically moving
it up against the active thrust shoe, or use the actual thrust
position to offset the transducer gap settings so that they
will be correct when the rotor is in the cold position.
Install and gap the probes for their cold gap settings using the information
provided from previous installations or data provided in the Turbine manual.
This example assumes that the correct cold set point (Green line) is 250 mils,
the rotor is placed against the active thrust shoes, and the measurement range
is 0 to 1000 mils.
Publication GMSI10-UM005C-EN-P - May 2010
Page 61

Configuration Parameters 53
Probe A Gap 250 150 0 400 mils=++=
Probe B Gap 1000 250 150 0++–900==
Calculate and set the transducers as follows:
1. To determine the placement of Probe A, add the Cold Set Point to the
Transducer Offset, then add the Axial Position from the Active Face.
2. To determine the placement of Probe B, subtract the Cold Set Point
from the Full Scale Reading, then add the Transducer Offset and the
Axial Position from the Active Face.
3. Enter the following data on the Channels property page in the XM-320
Position Module Configuration Tool.
Channel 1 (Probe A) Channel 2 (Probe B)
Sensitivity 30 Sensitivity 30
Eng. Units mils Eng. Units mils
Output Data Unit mils Output Data Unit mils
Fault Low
Fault High
-18
-2.6
1
2
Fault Low
Fault High
DC Bias Time Constant 1 DC Bias Time Constant 1
Target Angle 90 Target Angle 90
-18.2
-2.8
1
2
Upscale Away Upscale Towards
Calibration Offset 250 Calibration Offset 1000
Calibration Bias Press
Calculate
Bias
Calibration Bias -33 (You
must enter
value using
formula
below)
Mode Head-to-Head
1 This value is .2 volts below the lowest voltage the transducer will output for this measurement taken from the
calibration chart.
2 This value is .2 volts above the highest voltage the transducer will output for this measurement taken from the
calibration chart.
Publication GMSI10-UM005C-EN-P - May 2010
Page 62

54 Configuration Parameters
Transducer DC Bias 0.03 150(× 900 ) 3 –-25.5=–=
Calibration Bias Transducer DC Bias Sensitivity Calibration Offset ) sin (Target Angle)××(–=
IMPORTANT
Calibration Bias -25.5 0.03 250×()sin(90)× -33=–=
Calibration Bias Calculation
Since Probe B is gapped beyond the operating range, you must manually
calculate the calibration bias as well as the transducer DC bias.
1. To determine the Transducer DC Bias, subtract Position B Gap from
Transducer Offset, multiply by the Sensitivity and then add the
Transducer Offset voltage.
2. Use the following formula to calculate the Calibration Bias:
The formula used to calculate the Calibration Bias depends
on the Upscale setting and whether Fault High and Fault
Low are less than or equal to zero (0). Press F1 on the
Channels property page for a description of the formulas.
Radial Cancel Mode
In radial cancel mode, the movement of the shaft is detected by measuring the
gap between the probe tip and a ramp of known and consistent angle to the
center line of the shaft. If two ramps are present they should be measured as
shown below. The potential "lift" error of shaft position caused by jacking oil
pressure is eliminated in the module calculations.
Where only one ramp is available, the "lift" error must be taken into account,
and this is achieved by using a second probe operating on a portion of the
shaft which is parallel to the center line.
Publication GMSI10-UM005C-EN-P - May 2010
Page 63

Configuration Parameters 55
TIP
RADIAL CANCEL MODE
(two angles)
axial movement
radial
movement
(one angle)
XM Configuration
Utility
EDS Filet
Check to Enable Enabled
Clear to Disable Disabled
Figure 3.4 Radial Cancel Mode
The XM-320 provides monitoring facilities for the following machine
measurements when in radial cancel mode.
Alarm Parameters
Alarm Parameters
Parameter Name Description Values/Comments
Number (1-2) (XM Serial
Configuration Utility only)
Name (XM Serial Configuration
Utility only)
Enable Enable/disable the selected alarm.
• Standard Single Ramp Differential Expansion
• Non-standard Single Ramp Differential Expansion
• Dual Ramp Differential Expansion
In radial cancel mode, all position measurements are stored
in channel 1.
The Alarm parameters control the operation of the alarms (alert and danger
level) and provide alarm status. The XM-320 provides two alarms, one per
channel. Use these parameters to configure the alarms.
Sets the alarm to be configured in the XM Serial
Configuration Utility. There are two alarms in the
XM-320, one for each channel.
A descriptive name to identify the alarm in the XM
Serial Configuration Utility.
Note: The Alarm Status is set to Disarm when the
alarm is disabled.
Options: 1 (Channel 1 alarm)
2 (Channel 2 alarm)
Maximum 18 characters
Publication GMSI10-UM005C-EN-P - May 2010
Page 64

56 Configuration Parameters
Alarm Parameters
Parameter Name Description Values/Comments
Condition Controls when the alarm should trigger.
Options: Greater Than
• Greater than - Triggers the alarm when the
measurement value is greater than or equal to the
Alert and Danger Threshold values.
The Danger Threshold value must be greater than
or equal to the Alert Threshold value for the trigger
to occur.
• Less than - Triggers the alarm when the
measurement value is less than or equal to the
Alert and Danger Threshold values.
The Danger Threshold value must be less than or
equal to the Alert Threshold value for the trigger to
occur.
• Inside range - Triggers the alarm when the
measurement value is equal to or inside the range
of the Alert and Danger Threshold values.
The Danger Threshold (High) value must be less
than or equal to the Alert Threshold (High) value
AND the Danger Threshold (Low) value must be
greater than or equal to the Alert Threshold (Low)
value for the trigger to occur.
• Outside range - Triggers the alarm when the
measurement value is equal to or outside the
range of the Alert and Danger Threshold values.
The Danger Threshold (High) value must be greater
than or equal to the Alert Threshold (High) value,
AND the Danger Threshold (Low) value must be
less than or equal to the Alert Threshold (Low)
value for the trigger to occur.
Alert Threshold (High) The threshold value for the alert (alarm) condition.
Same measurement unit as Output
Data Unit selection for specified
Note: This parameter is the greater (High) threshold
channel.
value when Condition is set to "Inside Range" or
"Outside range."
Danger Threshold (High) The threshold value for the danger (shutdown)
condition.
Same measurement unit as Output
Data Unit selection for specified
channel.
Note: This parameter is the greater (High) threshold
value when Condition is set to "Inside Range" or
"Outside Range."
Alert Threshold (Low) The lesser threshold value for the alert (alarm)
condition.
Same measurement unit as Output
Data Unit selection for the specified
channel.
Note: This value is not used when Condition is set
to "Greater Than" or "Less Than."
Danger Threshold (Low) The lesser threshold value for the danger (shutdown)
condition.
Same measurement unit as Output
Data Unit selection for the specified
channel.
Note: This value is not used when Condition is set
to "Greater Than" or "Less Than."
Less Than
Inside Range
Outside Range
Publication GMSI10-UM005C-EN-P - May 2010
Page 65

Configuration Parameters 57
Alarm Parameters
Parameter Name Description Values/Comments
Hysteresis The amount that the measurement value must fall
(below the threshold) before the alarm condition is
cleared. For example, Alert Threshold = 120 and
Same measurement unit as Output
Data Unit selection for the specified
channel.
Hysteresis = 2. The alarm (alert) activates when the
measured value is 120 and will not clear until the
measured value is 118.
Note: The Alert and Danger Thresholds use the
same hysteresis value.
Note: For the Outside Range condition, the
hysteresis value must be less than Alert Threshold
High – Alert Threshold Low.
Startup Period The length of time that the Threshold Multiplier is
applied to the thresholds. The startup period begins
when the setpoint multiplier switch is reopened
(pushbutton disengaged or toggle switch flipped to
off).
Threshold Multiplier
The action to take when the setpoint multiplier
switch is closed (pushbutton engaged or toggle
switch flipped to on) and during the startup period
once the switch is reopened. The module applies the
multiplier to the alarm thresholds during this time to
avoid false alarms at resonance frequencies.
Note: The multiplication may have the opposite of
the intended affect under certain circumstances. For
example, if the Condition is set to "Less Than" and
the thresholds are positive, then multiplication of the
threshold values increases the likelihood of the
measured value being within the alarm range.
Therefore, you may want to disable the alarms
during the startup period.
Enter a value from 0 to 1092 minutes,
adjustable in increments of 0.1
minutes.
Enter any fractional value between 0
and 10.
Enter 0 (zero) to disabled the alarm
during the startup period.
Publication GMSI10-UM005C-EN-P - May 2010
Page 66

58 Configuration Parameters
IMPORTANT
XM Configuration
Utility
EDS File
Check to Enable Enabled
Clear to Disable Disabled
Relay Parameters
The Relay parameters control the operation of the on-board relay, as well as
the relays on the Expansion Relay (XM-441) module. Use these parameters to
configure which alarm(s) the relay is associated with as well as the behavior of
the relay.
A relay can be defined, regardless of whether or not it is
physically present. A non-physical relay is a virtual relay.
When a relay (physical or virtual) activates, the module
sends a Change of State (COS) message to its master,
which acts on the condition as necessary. An XM-440
Master Relay Module can activate its own relays in response
to a relay (physical or virtual) activation at any of its slaves.
Relay Parameters
Parameter Name Description Values/Comments
Number (XM Serial Configuration
Utility only)
Sets the relay to be configured in the XM Serial
Configuration Utility.
Number 1 is the on-board relay.
Numbers 2 through 5 are either relays
on the Expansion Relay module when
it’s connected to the module or virtual
relays.
Virtual relays are non-physical relays.
Use them when you want the effect of
the relay (monitor alarms, activation
delay, and change status) but do not
need an actual contact closure. For
example, a PLC or controller
monitoring the relay status.
Name (XM Serial Configuration
Utility only)
Enable Enable/disable the selected relay.
Publication GMSI10-UM005C-EN-P - May 2010
A descriptive name to help identify the relay in the
XM Serial Configuration Utility.
Note: The Relay Current Status is set to "Not
Activated" when the relay is disabled. See page 66.
Note: The Relay Installed parameter
indicates whether a relay is a virtual
relay or a physical relay on a module.
Maximum 18 characters
Page 67

Configuration Parameters 59
XM Configuration
Utility
EDS File
Latching Latching
Option
XM Configuration
Utility
EDS File
Check means
latching (relay must
be explicitly reset)
Latching
Clear means
non-latching (relay
is reset once the
alarm condition has
passed
Nonlatching
XM Configuration
Utility
EDS File
Activation Logic Logic
XM Configuration
Utility
EDS File
Alarm A/B Alarm
Identifier
A/B
Relay Parameters
Parameter Name Description Values/Comments
Controls whether an explicit reset is required to
deactivate the relay after the alarm subsides.
Activation Delay Enter the length of time for which the Activation
Logic must be true before the relay is activated. This
reduces nuisance alarms caused by external noise
and/or transient vibration events.
Sets the relay activation logic.
• A or B - Relay is activated when either Alarm A or
Alarm B meets or exceeds the selected Alarm
Status condition(s).
• A and B - Relay is activated when both Alarm A
and Alarm B meet or exceed the selected Alarm
Status condition(s).
• A Only - Relay is activated when Alarm A meets
or exceeds the selected Alarm Status
condition(s).
Sets the alarm(s) that the relay will monitor. The
alarm must be from the same device as the relay.
When the Activation Logic is set to "A and B" or "A
or B," you can select an alarm in both Alarm A and
Alarm B. The system monitors both alarms. When
the Activation Logic is set to "A only," you can
select an alarm only in Alarm A.
Enter a value from 0 to 25.5 seconds,
adjustable in increments of 0.1
seconds.
Default is 1 second
Options: A only
A or B
A and B
Alarm Number 1 or 2
Note: You can only select an alarm
that is enabled.
Publication GMSI10-UM005C-EN-P - May 2010
Page 68

60 Configuration Parameters
XM Configuration
Utility
EDS File
Alarm Status to
Activate On
Alarm Levels
XM Configuration
Utility
EDS File
Check = Physical
Relay
Installed =
Physical Relay
Clear = Virtual Relay Not Installed =
Virtual Relay
Relay Parameters
Parameter Name Description Values/Comments
Sets the alarm conditions that will cause the relay to
Options: Normal
activate. You can select more than one.
• Normal - The current measurement is not in
excess of any alarm thresholds.
• Alert - The current measurement is in excess of
the alarm level threshold(s) but not in excess of the
danger level threshold(s).
• Danger - The current measurement is in excess of
Check means enable.
Clear means disable.
the danger level threshold(s).
• Disarm-The alarm is disabled or the device is in
Program mode.
• Xdcr Fault - A transducer fault is detected on the
associated transducer.
• Module Fault - Hardware or firmware failure, or
an error has been detected and is preventing
proper operation of the device.
Relay Installed Indicates whether the relay is a physical relay on a
module or a virtual relay. If the relay is a physical
relay, then you can set the Failsafe parameter.
Danger
Xdcr Fault
Alert
Disarm
Module Fault
If the relay is a virtual relay, the Failsafe parameter
is not used or it is disabled.
Publication GMSI10-UM005C-EN-P - May 2010
Page 69

Configuration Parameters 61
XM Configuration
Utility
EDS File
Failsafe Relay Failsafe
Option
XM Configuration
Utility
EDS File
Check = Failsafe Failsafe
Clear = Nonfail-safe Nonfailsafe
Relay Parameters
Parameter Name Description Values/Comments
Controls whether the relay is failsafe or nonfail-safe.
Failsafe operation means that when in alarm, the
relay contacts are in their "normal," de-energized, or
"shelf-state" positions. In other words, normally
closed relays are closed in alarm, and normally open
relays are open in alarm. With failsafe operation, a
power failure equals an alarm.
The following are true of a relay in failsafe
operation:
• The relay is energized when power is applied to
the module.
• The relay in a nonalarmed condition has power
applied to the coil.
• In alarm condition, power is removed from the
relay coil, causing the relay to change state.
For nonfail-safe operation, the following are true:
• Under nonalarm conditions, the relay closes the
circuit between the common and the N.C.
(normally closed) terminals.
• Under alarm conditions, the relay changes state to
close the circuit between the common and the
N.O. (normally open) terminals.
For failsafe operation, the following are true:
• Under nonalarm (with power applied to the unit)
conditions, the relay closes the circuit between the
common and the N.O. terminals.
• Under alarm or loss-of-power conditions, the relay
changes state to close the circuit between the
common and the N.C. terminals.
Publication GMSI10-UM005C-EN-P - May 2010
Page 70

62 Configuration Parameters
XM Configuration
Utility
EDS File
Check to Enable Enabled
Clear to Disable Disabled
IMPORTANT
IMPORTANT
4-20mA Output Parameters
The 4-20mA output parameters define the characteristics of the two 4-20mA
output signals. The parameters are the same for each output.
4-20mA Parameters
Parameter Name Description Values/Comments
Enable Enables/disables the 4-20 mA output.
Min Range The measured value associated with the 4 mA. Same measurement unit as Output
Max Range The measured value associated with the 20 mA.
Data Unit selection for the specified
channel.
Measured values between Min Range and Max Range are
scaled into the range from 4.0 to 20.0 to produce the
output value. The Min Range value does not have to be
less than the Max Range value. If the Min Range value is
greater than the Max Range value, then the output signal
is effectively inverted from the input signal.
The 4-20mA outputs are either on or off. When they are
on, the 4-20mA outputs overshoot the 4 and 20mA limits
by 10% when the measurement exceeds the minimum and
maximum range. This means the minimum current
produced is 3.6mA and the maximum current produced is
22mA.
When the 4-20mA outputs are off, they produce a current
approximately 2.9mA. The 4-20mA outputs are off under
the following conditions:
• The 4-20mA outputs are set to "Disable" (see Enable
above).
• The module is in Program mode.
• A transducer fault occurs that affects the corresponding
measurement.
Publication GMSI10-UM005C-EN-P - May 2010
Page 71

Configuration Parameters 63
IMPORTANT
Triggered Trend Parameters
Triggered Trend Parameters
The XM-320 can collect a triggered trend. A triggered trend is a time-based
trend that is collected when a relay on the XM-320 is activated, or the module
receives a trigger event.
Once the triggered trend is configured, the XM-320 continuously monitors the
trended measurements. When a trigger occurs, the XM-320 collects additional
data as specified by the Post Trigger parameter.
The XM-320 can only store one triggered trend. Unless the triggered trend is
latched, the trend data is overwritten with new data when the next trigger
occurs.
The triggered trend parameters define the trend data that is collected by the
module. Use these parameters to select the measurements included in the
trend records, the interval between trend records, and which relay triggers
(activates) the collection of the trend data.
The Triggered Trend parameters are not included in the
EDS file and cannot be edited using generic configuration
tools such as RSNetWorx for DeviceNet.
Parameter Name Description Values/Comments
Enable Triggered Trend
Measurements
Select Measurements Sets the measurements to be collected and stored in
Number of Records The maximum number of measurement sets that can
Latch Enable Determines whether the trigger trend is latched or
Enable/disable the triggered trend measurements.
Select to configure the triggered trend
measurements.
the module.
be collected in the trend buffer. The measurement
sets make up the trend data.
unlatched.
Latched means that subsequent triggers are ignored
after the initial trigger. This prevents the trend data
from being overwritten with new data until the
trigger is manually reset (click Reset Trigger button).
Unlatched means that the trend data is overwritten
with new data every time a trigger occurs.
Check to enable.
Clear to disable.
More than one measurement can be
selected.
The Number of Records is
automatically calculated based upon
the number of Trended
Measurements selected.
Check means latched
Clear means unlatched
Publication GMSI10-UM005C-EN-P - May 2010
Page 72

64 Configuration Parameters
Triggered Trend Parameters
Parameter Name Description Values/Comments
Relay Number Sets the relay that triggers the trend to be collected. None means that the trend can only be
triggered manually or by a trigger
event (for example, XM-440).
Relay Number 1 is the on-board relay.
Numbers 2 through 5 are either relays
on the Expansion Relay module when
it’s connected to the module or virtual
relays.
Note: The relay must be enabled.
Refer to Relay Parameters on page 58.
Record Interval The amount of time between consecutive trend
1 to 3600 seconds
records.
Note: If you enter a Record Interval, the Trend Span
is automatically updated.
Trend Span The total amount of time that can be covered by the
Seconds
trend data (Number of Records x Record
Interval).
Note: If you edit the Trend Span, the Record
Interval is automatically updated.
Post Trigger The percentage of records to be collected once the
0 to 100 Percent
trigger occurs. For example, if you set Post Trigger to
20%, then 80% of the records in the trend are before
the trigger occurs, and 20% of the records in the
trend are after the trigger occurs.
This allows you to evaluate what happened after the
trigger occurred.
Status Shows the status of the trend data. Possible status values:
• Not collected - No trend data is
currently collected.
• Collecting - A trigger has occurred
and data (including post-trigger
data) is being collected.
• Collected - A trend has been saved
to the buffer and is available to view
and upload.
View Trend Data Displays a plot of the collected trend data.
Reset Trigger Resets the trigger if Latch enabled is selected. This
allows the module to overwrite the previous trend
data when the next trigger occurs.
Manual Trigger Triggers the module to collect the trend data without
relay activation.
Publication GMSI10-UM005C-EN-P - May 2010
Page 73

Configuration Parameters 65
IMPORTANT
XM Configuration
Utility
EDS File
Poll Output Poll
Response
Assembly
I/O Data Parameters
The I/O data parameters are used to configure the content and size of the
DeviceNet I/O Poll response message.
The XM module must be free of Poll connections when
configuring the Poll Output (Poll Response Assembly)
and Poll Size. Any attempt to download the parameters
while a master device has established the Poll connection
with the XM module will result in an error.
To close an existing Poll connection with an XM-440,
switch the XM-440 from Run mode to Program mode.
Refer to Changing Operation Modes on page 73.
To close an existing Poll connection with other master
devices, remove the module from the scan list or turn off
the master device.
I/O Data Parameters
Parameter Name Description Values/Comments
COS Size (XM Serial
Configuration Utility only)
COS Output (XM Serial
Configuration Utility only)
Poll Size The size (number of bytes) of the Poll response
The size (number of bytes) of the Change of State
(COS) message.
The Assembly instance used for the COS message.
The COS message is used to produce the Alarm and
Relay status for the module.
message.
The COS Size cannot be changed.
The COS Output cannot be changed.
Refer to COS Message Format on
page 78 for more information.
Assembly Instance Table (XM
Serial Configuration Utility only)
Custom Assembly (XM Serial
Configuration Utility only)
Sets the Assembly instance used for the Poll
response message. Each Assembly instance contains
a different arrangement of the Poll data.
The Poll response message is used by the XM
module to produce measured values. It can contain
up to 31 REAL values for a total of 124 bytes of data.
Displays the format of the currently selected COS or
Poll Assembly instance.
Defines a custom data format for the Poll response.
The custom assembly can contain any of the
measurement parameters included in Assembly
instance 101, as well as alarm and relay
configuration parameters.
Options: Assembly Instance 101
Custom Assembly
Refer to Poll Message Format on page
77 for more information.
The highlighted (yellow) Assembly
structure bytes are included in the I/O
message.
You can select up to 20 parameters.
Refer to Poll Message Format on page
77 for more information.
Publication GMSI10-UM005C-EN-P - May 2010
Page 74

66 Configuration Parameters
TIP
XM Configuration
Utility
EDS File
Transducer Fault Transducer
Status
Data Parameters
The Data parameters are used to view the measured values of the input
channels and the 4–20mA outputs, as well as to monitor the status of the
channels, alarms, and relays.
To view all the data parameters in the XM Serial
Configuration Utility, click the View Data tab.
Channel Data
Channel Data Parameters
Parameter Name Description Values/Comments
Channel Status States whether a fault condition exists. If a fault
exists, the measurement value may not be accurate.
Measurement Value Shows the current measurement value for the
channel.
States whether a transducer fault exists. Possible status values: No Fault
Fault
Transducer DC Bias
4-20mA Output A and B (XM
Serial Configuration Utility only)
Shows the measured average DC offset of the
transducer signal. This value is compared with Fault
High and Fault Low to determine whether the
transducer is working properly.
Shows the current output value in the range of 4.0 to
20.0mA.
Publication GMSI10-UM005C-EN-P - May 2010
Page 75

Configuration Parameters 67
Alarm and Relay Status
Alarm and Relay Status Parameters
Parameter Name Description Values/Comments
Alarm Status States the current status of the alarm. Possible status values.
• Normal - The alarm is enabled, the
device is in Run mode, there is no
transducer fault, and the current
measurement is not within the Alert
or Danger Threshold value(s).
• Alert - The alarm is enabled, the
device is in Run mode, there is no
transducer fault, and the current
measurement is in excess of the
Alert Threshold value(s) but not in
excess of the Danger Threshold
value(s).
• Danger - The alarm is enabled, the
device is in Run mode, there is no
transducer fault, and the current
measurement is in excess of the
Danger Threshold value(s).
• Disarm-The alarm is disabled or the
device is in Program mode.
• Transducer Fault - The alarm is
enabled, the device is in Run mode,
and a transducer fault is detected on
the associated transducer.
• Module Fault - Hardware or
firmware failure, or an error has
been detected and is preventing
proper operation of the device.
Relay Status States the current status of the relay. Possible status values: Activated
Not Activated
Publication GMSI10-UM005C-EN-P - May 2010
Page 76

68 Configuration Parameters
IMPORTANT
Device Mode Parameters
The Device Mode parameters are used to control the functions and the
behavior of the device.
The XM Serial Configuration Utility handles these
parameters automatically and transparently to the user.
Device Mode Parameters
Parameter Name Description Values/Comments
Device Mode Sets the current operation mode of the device. Refer
to Changing Operation Modes on page 73 for more
information.
Autobaud Enables/disables autobaud.
When autobaud is set to "Enabled," the module will
listen to other devices on the network to determine
the correct baud rate to use for communications.
When autobaud is set to "Disabled," the module
baud rate must be set manually.
Options: Run Mode
Options: Enabled
Program Mode
Disabled
Publication GMSI10-UM005C-EN-P - May 2010
Page 77

Appendix
A
Specifications
Appendix A lists the technical specifications for the XM-320 Position Module.
XM-320 Technical Specifications
Product Feature Specification
Communications
DeviceNet
Standard DeviceNet protocol for all
functions
NOTE: The XM-320 uses only the DeviceNet
protocol, not power. Module power is provided
independently.
Available Electronic Data Sheet (EDS) file
provides support for most DeviceNet
compliant systems
Baud rate automatically set by bus master
to 125kb, 250kb, 500kb
Inputs
Side Connector
Serial
2 Channels
Transducer Power
Voltage Range
All XM measurement and relay modules
include side connectors that allow
interconnecting adjacent modules, thereby
simplifying the external wiring
requirements.
The interconnect provides primary power,
DeviceNet communications, and the circuits
necessary to support expansion modules,
such as the XM-441 Expansion Relay
module.
RS-232 via mini-connector or terminal base
unit
Baud rate fixed at 19200
NOTE: Local configuration via Serial
Configuration Utility.
Eddy current transducer signals
Linear variable differential transformer
Voltage signals from any position
measurement sensor
Isolated 24 Volts that can be wired to be
either +24V or -24V
Selectable in software between -24V and
+24V
Sensitivity
Input Impedance
69 Publication GMSI10-UM005C-EN-P - May 2010
User configurable in software
Greater than 100kohm
Page 78

70 Specifications
XM-320 Technical Specifications
Product Feature Specification
Outputs
4-20mA Outputs
Two isolated outputs
600 ohm max load
Buffered Outputs
2 outputs; 1 per channel
Indicators
6 LEDs Module Status - red/green
Network Status - red/green
Channel 1 Status - yellow/red
Channel 2 Status - yellow/red
Setpoint Multiplier - yellow
Relay - red
Measurement Modes Normal (two independent channels)
Head-to-head
Radial cancel
Delta Time Buffer
Number of Records
Delta Time Interval
Trigger Mode
2048
1 to 3600 seconds
Relay on the XM-320 module is activated,
or by a trigger event (for example,
DeviceNet command from a controller or
host)
The data collected in the buffer is user
configurable.
Alarms
Number
2 alarm and danger pairs
Publication GMSI10-UM005C-EN-P - May 2010
Startup Inhibit/Setpoint Multiplication
Relays
Operators
Greater than
Less than
Inside range
Outside range
Hysteresis
User configurable in software
Period: 0 to 1092 minutes, adjustable in 0.1
minute increments
Inhibit/multiplication function: Multiply by
N (0 to 10, 0 = Disarm)
Number Single on-board relay, two sets of contacts -
DPDT (2 Form C)
Four additional relays when interconnected
to an XM-441 Expansion Relay module, or
Four virtual relays whose status can be
used by remote Control Systems or the
XM-440 Master Relay module
Page 79

XM-320 Technical Specifications
Product Feature Specification
On-board Relay Rating
Maximum Voltage: 125V dc, 125V ac
Maximum Current: 3.5A*
Minimum Current: 0
Maximum Power: 60W, 62.5VA
*Max current is up to 40°C, then derates to 2A at
65°C.
Agency Rating:
120V ac @ 0.5A
110V dc @ 0.3A
30V dc @ 1.0A
Specifications 71
Failsafe
Normally energized (failsafe), or
Normally de-energized (non-fail-safe)
Latching
Latching, or
Non-latching
Time Delay
0 to 25.5 seconds, adjustable in 100msec
increments
Voting Logic
Single or paired "And" or "Or" logic applied
to any alarm
Reset
Local reset switch on top of module
Remote reset switch wired to terminal base
Digital reset command via serial or
DeviceNet interface
Activation On
Alarm Status:
Normal
Alert
Danger
Disarm
Transducer fault
Module fault
Non-Volatile Configuration A copy of the module configuration is
retained in non-volatile memory from where
it is loaded upon power up*.
Power
Module
Consumption
*The configuration stored in non-volatile
memory can be deleted only by a module-reset
command sent via the serial interface, using
the Serial Configuration Utility, or via
DeviceNet from any compliant software
application.
+21.6 to 26.4V dc
Maximum: 200mA
Typical: 165mA
Publication GMSI10-UM005C-EN-P - May 2010
Page 80

72 Specifications
UL UL Listed for Ordinary
Locations
UL UL Listed for Class I, Division 2
Group A, B, C, and D Hazardous
Locations
CSA CSA Certified Process Control
Equipment
CSA CSA Certified Process Control
Equipment for Class I, Division
2 Group A, B, C, and D
Hazardous Locations
EEX* European Union 94/9/EEC ATEX
Directive, compliant with EN
50021; Potentially Explosive
Atmospheres, Protection “n”
CE* European Union 89/336/EEC
EMC Directive
C-Tick* Australian
Radiocommunications Act,
compliant with:
AS/NZS 2064, Industrial
Emissions
XM-320 Technical Specifications
Product Feature Specification
Heat Production
Maximum: 5.28 Watts (18 BTU/hr)
Typical: 3.96 Watts (13.5 BTU/hr)
Transducer
Environmental
Operating Temperature
Storage Temperature
Relative Humidity
Physical
Dimensions
Terminal Screw Torque
Approvals
(when product or packaging is marked)
Isolated 24V dc, user configurable with
wiring
-20 to +65°C (-4 to +149°F)
-40 to +85°C (-40 to +185°F)
95% non-condensing
All printed circuit boards are conformally coated
in accordance with IPC-A-610C.
Height: 3.8in (97mm)
Width: 3.7in (94mm)
Depth: 3.7in (94mm)
7 pound-inches (0.6Nm)
Publication GMSI10-UM005C-EN-P - May 2010
*See the Product Certification link at
www.rockwellautomation.com for Declarations
of Conformity, Certificates and other
certification details.
Page 81

DeviceNet Information
IMPORTANT
Appendix
B
Electronic Data Sheets
Changing Operation Modes
Electronic Data Sheet (EDS) files are simple text files used by network
configuration tools such as RSNetWorx (Version 3.0 or later) to help you
identify products and easily commission them on a network. The EDS files
describe a product’s device type, product revision, and configurable parameters
on a DeviceNet network.
The EDS files for the XM modules are installed on your computer with the
XM configuration software. The latest EDS files can also be obtained at
http://www.ab.com/networks/eds/ or by contacting your local Rockwell
Automation representative.
Refer to your DeviceNet documentation for instructions on registering the
EDS files.
XM modules operate in two modes.
Mode Description
Run The XM measurement modules collect measurement data and
monitor each measurement device.
The XM-440 establishes I/O connections with the XM
measurement modules in its scan list and monitors their alarms,
and controls its own relay outputs accordingly.
Program The XM module is idle.
The XM measurement modules stop the signal
processing/measurement process, and the status of the alarms
is set to the disarm state to prevent a false alert or danger
status.
The XM-440 closes the I/O connections with the XM
measurement modules in its scan list and stops monitoring their
alarms; relays are deactivated unless they are latched.
Configuration parameters can be read, updated and downloaded
to the XM module.
To change the operation mode of the module, use the Device Mode parameter
in the EDS file. Note that the Stop and Start services described on page 75 can
also be used to change the operation mode.
The XM Serial Configuration Utility software automatically
puts XM modules in Program mode and Run mode
without user interaction.
73 Publication GMSI10-UM005C-EN-P - May 2010
Page 82

74 DeviceNet Information
TIP
TIP
TIP
TIP
Transition to Program Mode
Parameter values can only be downloaded to an XM module while the module
is in Program mode. Any attempt to download a parameter value while the
module is in Run mode will result in a Device State Conflict error.
To transition an XM module from Run mode to Program mode on a
DeviceNet network, set the Device Mode parameter to "Program mode" and
click Apply. Note that you cannot change any other parameter until you have
downloaded the Program mode parameter.
The Module Status indicator flashes green when the
module is in Program mode.
Refer to your DeviceNet documentation for specific instructions on editing
EDS device parameters.
You can also use the Stop service described on page 75 to
transition XM modules to Program mode.
Transition to Run Mode
In order to collect data and monitor measurement devices, XM modules must
be in Run mode. To transition an XM module from Program mode to Run
mode on a DeviceNet network, set the Device Mode parameter to "Run
mode" and click Apply.
The Module Status indicator is solid green when the
module is in Run mode.
Refer to your DeviceNet documentation for specific instructions on editing
EDS device parameters.
You can also use the Start service described on page 75 to
transition XM modules to Run mode.
Publication GMSI10-UM005C-EN-P - May 2010
Page 83

DeviceNet Information 75
XM Services
XM Services
Action
Transition to Run Mode Start
Transition to Program Mode Stop
Save configuration to
non-volatile memory (EEPROM)
Delete saved configuration from
non-volatile memory (EEPROM)
Reset a specific latched relay Reset
Reset all latched relays Reset
The table below defines the services supported by the XM modules. The table
includes the service codes, classes, instances, and attributes by their
appropriate hexadecimal codes. Use the Class Instance Editor in RSNetWorx
to execute these services, as illustrated in the example below.
Service Code
(Hex)
(06)
(07)
Save
(16)
Delete
(09)
(05)
(05)
Class
(Hex) Instance Attribute Data
Device Mode Object
(320)
Device Mode Object
(320)
Device Mode Object
(320)
Device Mode Object
(320)
Relay Object
(323)
Relay Object
(323)
1 None None
1 None None
1 None None
1 None None
Relay number
1-C for XM-440,
1-5 for XM-12X,
XM-320 and
XM-220, 1-8 for
XM-36X and
XM-16X
0 None None
None None
Reset the Peak Speed (XM-12X
only)
Close the virtual setpoint
multiplier switch to activate the
alarm setpoint multipliers (not
applicable to all XM modules)
Open the virtual setpoint
multiplier switch to start the
setpoint multiplier timers and
eventually cancel alarm setpoint
multiplication (not applicable to
all XM modules)
Reset
(05)
Other
(33)
Other
(32)
Speed Measurement
Object
(325)
Discrete Input Point
Object
(08)
Discrete Input Point
Object
(08)
1, 2 for XM-220 None None
1 None None
1 None None
Publication GMSI10-UM005C-EN-P - May 2010
Page 84

76 DeviceNet Information
Select the Save
service code
Clear Send the attribute
ID and then enter the
Class (320
hex
) and
Instance (1)
Click Execute to
initiate the
action
Example
To save the configuration parameters to the non-volatile memory (EEPROM),
fill in the Class Instance Editor as shown below.
Invalid Configuration Errors
A Start or Save service request to an XM module may return an Invalid Device
Configuration error when there is a conflict amongst the configuration
settings.
The general error code for the Invalid Device Configuration error is D0
hex
.
An additional error code is returned with the general error code to specify
which configuration settings are invalid. The table below lists the additional
error codes associated with the Invalid Device Configuration error.
Additional Error Codes returned with the Invalid Device Configuration Error (0xD0)
Error Code
(Hex) Description
01 No specific error information is available.
02 Mismatched transducer, channel, and/or measurement unit.
03 Inverted transducer fault high/low values.
04 Alarm thresholds conflict with the alarm condition.
05 Alarm speed range is invalid.
06 Band minimum frequency is greater than maximum frequency. Or,
07 Relay is associated with an alarm that is not enabled.
08 Tachometer must be enabled for alarm or channel settings.
09 A senseless speed range is enabled on a speed alarm.
maximum frequency is greater than FMAX.
Publication GMSI10-UM005C-EN-P - May 2010
Page 85

DeviceNet Information 77
Additional Error Codes returned with the Invalid Device Configuration Error (0xD0)
Error Code
(Hex) Description
0A Too many alarms associated with a single measurement.
0B Invalid node address in the alarm list.
0C Too many alarms in the alarm list. Or, no alarms in the alarm list.
0D Alarm levels cannot be zero for alarms that are enabled.
0E Too many slaves in the scanner’s input data table.
0F The FMAX and Number of Lines do not yield correct vector calculations.
10 Phase (vector) alarms prohibited with synchronous sampling and more
than 1 tachometer pulse per revolution.
11 Order-base bands are prohibited on asynchronous channel.
12 Unsupported Sensor Type and Channel ID combination.
13 Invalid Alarm Type for the associated measurement ID.
14 Synchronous sampling is required for alarm on synchronous
measurements.
15 Integration is not supported with the Bypass High Pass Filter option.
XM-320 I/O Message Formats
The XM-320 module supports Poll, Change of State (COS), and Bit-Strobe
I/O messages. The Poll response message is used by the XM module to
produce measured values, and the COS message is used to produce the Alarm
and Relay Status. The Bit-Strobe message is used by a master device to send a
trigger event to all the XM slaves on the network.
Poll Message Format
The XM-320 Poll request message contains no data. The Poll response
message can contain up to 31 REAL values for a total of 124 bytes.
The XM-320 module provides one pre-defined (static) data format of the Poll
response, as defined in Assembly instance 101. It also provides a dynamic
Assembly instance, instance 199, with which you can define a custom data
format for the Poll response. The dynamic Assembly instance can contain any
of the measurement parameters included in Assembly instance 101, as well as
several of the alarm and relay configuration parameters.
The default Assembly instance is 101 and the default size is 8 bytes. You can
change the Assembly instance and define the custom Assembly instance using
the configuration software. Refer to I/O Data Parameters on page 65.
Publication GMSI10-UM005C-EN-P - May 2010
Page 86

78 DeviceNet Information
The Poll response data can also be requested explicitly through Assembly
Object (Class ID 0x4), Instance 101 (0x65), Data Attribute (3).
The following table shows the static data format of Assembly instance 101.
XM-320 I/O Poll Response Message Format
Byte Definition
0–3 Channel 1 Position measurement value
4–7 Channel 2 Position measurement value
COS Message Format
The XM-320 COS message contains five bytes of data as defined in the table
below. The COS data can also be requested explicitly through Assembly
Object (Class ID 0x4), Instance 100 (0x64), Data Attribute (3).
XM-320 COS Message Format
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Relay 1
Status
1 Relay 2
Status
2 Relay 3
Status
3 Relay 4
Status
4 Relay 5
Status
Setpoint
Multiplier
Status
Reserved Reserved Reserved
Reserved Reserved Reserved
Reserved Reserved Reserved
Reserved Reserved Reserved
Alarm 2 Status Alarm 1 Status
XM Status Values
The following tables describe the XM Status values that are included in the
COS messages.
Alarm Status Descriptions
Alarm Status Value Description
0Normal
Publication GMSI10-UM005C-EN-P - May 2010
1Alert
2 Danger
3Disarm
4 Transducer Fault (Sensor OOR)
Page 87

Alarm Status Descriptions
Alarm Status Value Description
5 Module Fault
6 Tachometer Fault
7 Reserved
Setpoint Multiplier Status Descriptions
Setpoint Multiplier Status Value Description
0 Not Activated
1 Activated
Relay Status Descriptions
Relay Status Value Description
0Not Activated
1Activated
DeviceNet Information 79
Bit-Strobe Message Format
The Bit-Strobe command sends one bit of output data to each XM slave
whose node address appears in the master’s scanlist.
The Bit-Strobe command message contains a bit string of 64 bits (8 bytes) of
output data, one output bit per node address on the network. One bit is
assigned to each node address supported on the network (0...63) as shown in
Figure B.1.
Figure B.1 Bit-Strobe Command
Publication GMSI10-UM005C-EN-P - May 2010
Page 88

80 DeviceNet Information
IMPORTANT
TIP
The XM modules use the bit received in a Bit-Strobe connection as a trigger
event. When the bit number corresponding to the XM module’s node address
is set, the XM module will collect the triggered trend data.
Note that the XM modules do not send data in the Bit-Strobe response.
ADR for XM Modules
Automatic Device Replacement (ADR) is a feature of an Allen-Bradley
DeviceNet scanner. It provides a means for replacing a failed device with a
new unit, and having the device configuration data set automatically. Upon
replacing a failed device with a new unit, the ADR scanner automatically
downloads the configuration data and sets the node address.
It is recommended that ADR not be used in safety related
applications. If the failure of the ADR server, and a subsequent power cycle, would result in the loss of protection for
a machine, then ADR should not be implemented.
ADR can be used with XM modules but keep the following in mind when
setting up the XM modules.
• The ADR scanner can not download the configuration data to an XM
module if the module has a saved configuration in its non-volatile
memory. This happens because the saved configuration is restored and
the module enters Run mode when the power is cycled. (Configuration
parameters cannot be downloaded while an XM module is in Run
mode.) XM modules must be in Program mode for the ADR
configuration to be downloaded and this occurs only when there is no
saved configuration.
Publication GMSI10-UM005C-EN-P - May 2010
To delete a saved configuration from non-volatile
memory, use the Delete service in RSNetWorx for
DeviceNet or perform the following steps in the XM
Serial Configuration Utility.
1. Save the current configuration to a file. From the
File menu, click Save As and enter a file name for
the configuration.
2. Reset the module to factory defaults. Click the
Module tab and click the Reset button.
3. Reload the saved configuration. From the File
menu, click Open and select the configuration file.
4. Make certain to disable auto save. From the Device
menu, clear the Auto Save Configuration check
mark.
Page 89

DeviceNet Information 81
• An XM module will enter Run mode automatically after the ADR
scanner restores the module’s configuration only if the module is in Run
mode at the time the configuration is saved to the scanner. If the
module is in Program mode when the configuration is saved, then the
module will remain in Program after the configuration is downloaded by
the ADR scanner.
• The ADR scanner saves and restores only the configuration parameters
contained in the module’s EDS file. Some XM parameters are not
included in the EDS file because they are not supported by either the
EDS specification or the tools that read the EDS files, for example
RSNetWorx for DeviceNet. These configuration parameters will not be
restored with ADR.
Below is a list of the configuration parameters that are not included in
the EDS file and can not be saved or restored with ADR.
– Channel Name
– Tachometer Name
– Alarm Name
– Relay Name
– All Triggered Trend related parameters (see page 63)
– All SU/CD Trend related parameters
– Custom Assembly structure (see page 65)
• The ADR and trigger group functions cannot be used together. A
module can have only one primary master so a module cannot be both
configured for ADR and included in a trigger group. The ADR scanner
must be the primary master for the modules configured for ADR. The
XM-440 Master Relay module must be the primary master for modules
included in a trigger group.
Publication GMSI10-UM005C-EN-P - May 2010
Page 90

82 DeviceNet Information
Publication GMSI10-UM005C-EN-P - May 2010
Page 91

Appendix
TIP
C
DeviceNet Objects
Appendix C provides information on the DeviceNet objects supported by the
XM-320 module.
For information about See page
Identity Object (Class ID 01H) 84
DeviceNet Object (Class ID 03H) 85
Assembly Object (Class ID 04H) 87
Connection Object (Class ID 05H) 90
Discrete Input Point Object (Class ID 08H) 92
Analog Input Point Object (Class ID 0AH) 93
Parameter Object (Class ID 0FH) 95
Acknowledge Handler Object (Class ID 2BH) 98
Alarm Object (Class ID 31DH) 99
Device Mode Object (Class ID 320H) 101
Relay Object (Class ID 323H) 102
Transducer Object (Class ID 328H) 105
4-20mA Output Object (Class ID 32AH) 106
Refer to the DeviceNet specification for more information
about DeviceNet objects. Information about the
DeviceNet specification is available on the ODVA web site
(http://www.odva.org).
83 Publication GMSI10-UM005C-EN-P - May 2010
Page 92

84 DeviceNet Objects
Identity Object
(Class ID 01
)
H
The Identity Object provides identification and general information about the
device.
Class Attributes
The Identity Object provides no class attributes.
Instance Attributes
Table C.1 Identity Object Instance Attributes
Access
Attr ID
1 Get Vendor ID UINT 668 = Entek
2 Get Device Type UINT 109 (Specialty I/O)
3 Get Product Code UINT 23 (0x17) XM-320
4 Get Revision:
5 Get Status WORD
Rule Name Data Type Default Value
STRUCT OF
Major
Minor
USINT
USINT
Value varies with each firmware revision.
Value varies with each firmware revision.
6 Get Serial Number UDINT
7 Get Product Name SHORT_
STRING
Status
The Status is a 16 bit value. The following bits are implemented.
Table C.2 Identity Object Status
Bit Name Description
0 Owned TRUE indicates that the module has an owner. More
specifically, the Predefined Master/Slave Connection Set
has been allocated to a master.
1 Reserved, set to 0
2 Configured This bit is set whenever a saved configuration is
successfully loaded from non-volatile memory. This bit is
cleared whenever the default configuration is restored or
loaded.
3 Reserved, set to 0
"XM-320 Position Module"
Publication GMSI10-UM005C-EN-P - May 2010
Page 93

DeviceNet Objects 85
Table C.2 Identity Object Status
Bit Name Description
4 Boot Program Vendor-specific, indicates that the boot program is
running. The Main Application must be corrupt or
missing.
5 - 7 Vendor-specific, not implemented
8 Minor Recoverable
Fault
9 Minor Unrecoverable
Fault
10 Major Recoverable
Fault
11 Major Unrecoverable
Fault
12 - 15 Reserved, set to 0
Set whenever there is a transducer or tachometer fault.
Not implemented
Set when the module detects a major problem that the
user may be able to recover from. The Module Status
LED will flash red. An example of this condition is when
the boot program is running.
Set when there is a module status fault (Module Status
LED is solid red).
Services
Table C.3 Identity Object Services
Service
Code Class/Instance Usage Name
01
05
0E
10
h
h
h
h
Instance Get_Attributes_All
Instance Reset
Instance Get_Attribute_Single
Instance
Set_Attribute_Single
1
DeviceNet Object
(Class ID 03
)
H
1 Attributes can only be set while the device is in Program Mode. See the description of the Device Mode Object
for more information.
The DeviceNet Object is used to provide the configuration and status of a
physical attachment to DeviceNet.
Publication GMSI10-UM005C-EN-P - May 2010
Page 94

86 DeviceNet Objects
Class Attributes
Table C.4 DeviceNet Object Class Attributes
Access
Attr ID
1 Get Revision UINT 2
Rule Name Data Type Default Value
Instance Attributes
Table C.5 DeviceNet Object Instance Attributes
Access
Attr ID
1 Get/Set
2 Get/Set
3 Get Bus-Off Interrupt BOOL 0
4 Get/Set Bus-Off Counter USINT 0
Rule Name Data Type Default Value
1
MAC ID
Baud Rate
2
USINT 63
USINT 0
5 Get Allocation Information STRUCT of
BYTE
USINT
100 Get/Set Autobaud Disable BOOL 0 (Ignore attribute 2 and always autobaud)
1 Setting the MAC ID causes the device to reset automatically, after which it will go online with the new MAC
ID.
2 The Baud Rate setting can not be set while Autobaud Disable is equal to 0. The new baud rate will not take
effect until the module is reset.
0 255
The MAC ID, Baud Rate, and Autobaud Disable settings are stored in
non-volatile memory so they do not reset to the default with each power cycle.
The Baud Rate attribute supports the following settings:
• 0 = 125 kbps
• 1 = 250 kbps
• 2 = 500 kbps
The Baud Rate setting is used only when automatic baud rate detection is
disabled (Autobaud Disable = 1). When Autobaud Disable is set to zero
(0), the module ignores its Baud Rate setting and performs automatic baud
rate detection instead. This means that the module will determine the network
baud rate by listening for network traffic before attempting to go online.
Publication GMSI10-UM005C-EN-P - May 2010
Page 95

DeviceNet Objects 87
Services
Table C.6 DeviceNet Object Services
Service
Code Class/Instance Usage Name
0E
h
10
h
4B
h
4C
h
1 Attributes can only be set while the device is in Program Mode. See the description of the Device Mode Object
for more information.
Class/Instance Get_Attribute_Single
Instance
Instance Allocate_Master/Slave_Connetion_Set
Instance Release_Group_2_Identifier_Set
Set_Attribute_Single
1
Assembly Object
(Class ID 04
)
H
Table C.7 Assembly Object Class Attributes
Attr ID
1 Get Revision UINT Revision of the
The Assembly Object binds attributes of multiple objects to allow data to or
from each object to be sent or received in a single message.
The XM-320 module provides both static and dynamic assemblies.
Class Attributes
Access
Rule Name Data Type Description Semantics
2
implemented object.
Instances
Table C.8 Assembly Object Instances
Instance Name Type Description
100 Default COS Message Input Alarm and Relay Status values
101 Default Poll Response
Message
102 - 106 Alternate Poll Response
Message
Input Measurement values
Input Measurement values
199 Alternate Dynamic Poll
Response Message
Input User configurable
measurement values and
configuration parameters
Publication GMSI10-UM005C-EN-P - May 2010
Page 96

88 DeviceNet Objects
Table C.9 Assembly Object Instance Attributes
Attr ID
1 Get Number of Members in list UINT Only supported for Dynamic Assembly
2 Set Member List Array of STRUCT: Only supported for Dynamic Assembly
3 Get Data Defined in tables
Instance Attributes
Access
Rule Name Data Type Value
instance
instance
Member Data Description UINT Size of member data value in bits
Member Path Size UINT
Member Path Packed EPATH
on the following
pages.
Assembly Instance Attribute Data Format
Instance 100 - Alarm and Relay Status
This assembly is sent using COS messaging when any of the Alarm or Relay
Status values change.
Table C.10 Instance 100 Data Format (Alarm and Relay Status Values Assembly)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Relay 1
Status
1 Relay 2
Status
2 Relay 3
Status
3 Relay 4
Status
4 Relay 5
Status
Set Point
Multiplier
00 0
00 0
00 0
00 0
Alarm 2 Status Alarm 1 Status
Publication GMSI10-UM005C-EN-P - May 2010
Page 97

DeviceNet Objects 89
Instance 101 - Measurement Values
This is the default assembly instance that is sent using the I/O Poll Response
message when an I/O Poll Request is received from a DeviceNet Master.
Table C.11 Instance 101 Data Format (Measurement Values Assembly)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 - 3 Transducer 1 Position value
4 - 7 Transducer 2 Position value
Instance 199 - Dynamic Assembly
This Assembly instance can be created and configured with the XM Serial
Configuration Utility or RSMACC Enterprise Online Configuration Utility.
Using the configuration software, you determine the format of the data. This
assembly instance can be selected to be sent in response to an I/O Poll request
from a Master.
The dynamic Assembly can include all of the measurement values included in
Assembly instance 101. In addition, the dynamic Assembly can include the
following configuration parameters.
Table C.12 Instance 199 Component Mapping
EPATH (where ii =
instance number)
21 1D 03 24 ii 30 04 Alarm 31D
21 1D 03 24 ii 30 07 Alarm 31D
21 1D 03 24 ii 30 08 Alarm 31D
21 1D 03 24 ii 30 09 Alarm 31D
21 1D 03 24 ii 30 0A Alarm 31D
21 1D 03 24 ii 30 0B Alarm 31D
21 1D 03 24 ii 30 0C Alarm 31D
21 1D 03 24 ii 30 0D Alarm 31D
21 1D 03 24 ii 30 0E Alarm 31D
21 23 03 24 ii 30 04 Relay 323
21 23 03 24 ii 30 05 Relay 323
21 23 03 24 ii 30 06 Relay 323
21 23 03 24 ii 30 07 Relay 323
21 23 03 24 ii 30 09 Relay 323
Class
Name
Class
Number
Instance
Number
h
h
h
h
1 - 2 Alarm Enable 4 BOOL
1 - 2 Condition 7 USINT
1 - 2 Alert Threshold (High) 8 REAL
1 - 2 Danger Threshold
Attribute
Name
Attribute
Number
Data
Ty pe
9REAL
(High)
h
h
1 - 2 Hysteresis 12 REAL
h
h
1 - 2 Alert Threshold Low 10 REAL
1 - 2 Danger Threshold Low 11 REAL
1 - 2 Threshold (Set Point)
13 REAL
Multiplier
h
h
h
1 - 5 Failsafe Enable 6 BOOL
h
h
h
1 - 16 Startup Period 14 UINT
1 - 5 Relay Enable 4 BOOL
1 - 5 Latch Enable 5 BOOL
1 - 5 Delay 7 UINT
1 - 5 Alarm Level 9 BYTE
Publication GMSI10-UM005C-EN-P - May 2010
Page 98

90 DeviceNet Objects
Table C.12 Instance 199 Component Mapping
EPATH (where ii =
instance number)
21 0F 00 24 ii 30 01 Param 0F
21 0F 00 24 ii 30 01 Param 0F
21 23 03 24 ii 30 0C Relay 323
21 23 03 24 ii 30 0E Relay 323
Class
Name
Class
Number
The dynamic Assembly instance must be instantiated with a call to the class
level Create service. Then the structure can be defined with the
Set_Attribute_Single service for the Member List attribute. Only one dynamic
Attribute instance is supported so subsequent calls to the Create service will
return a Resource Unavailable (0x02) error. The Delete service can be used to
destroy the dynamic Assembly instance so that it can be re-created.
Services
Table C.13 Assembly Object Services
Instance
Number
h
h
h
h
6 - 10 Parameter Value
11 - 15 Parameter Value
1 - 5 Logic 12 USINT
1 - 5 Relay Installed 14 BOOL
Attribute
Name
(Alarm Identifier A)
(Alarm Identifier B)
Attribute
Number
1USINT
1USINT
Data
Ty pe
Connection Object
(Class ID 05
)
H
Service
Code Class/Instance Usage Name
0E
10
08
09
h
h
h
h
Class/Instance Get_Attribute_Single
Instance Set_Attribute_Single
Class Create
Instance Delete
The Connection Object allocates and manages the internal resources
associated with both I/O and Explicit Messaging Connections.
Class Attributes
The Connection Object provides no class attributes.
Publication GMSI10-UM005C-EN-P - May 2010
Page 99

Instances
Table C.14 Connection Object Instances
Instance Description
1 Explicit Message Connection for pre-defined connection set
2 I/O Poll Connection
3 I/O Strobe Connection
4 I/O COS (change of state) Connection
11 - 17 Explicit Message Connection
Instance Attributes
Table C.15 Connection Object Instance Attributes
Access
Attr ID
1 Get State USINT State of the object.
Rule Name Data Type Description
DeviceNet Objects 91
2 Get Instance Type USINT Indicates either I/O or Messaging
Connection.
3 Get Transport Class Trigger BYTE Defines behavior of the Connection.
4 Get Produced Connection ID UINT Placed in CAN Identifier Field when the
Connection transmits.
5 Get Consumed Connection IDUINT CAN Identifier Field value that denotes
message to be received.
6 Get Initial Comm
Characteristics
7 Get Produced Connection
Size
8 Get Consumed Connection
Size
9 Get/Set Expected Packet Rate UINT Defines timing associated with this
12 Get/Set Watchdog Time-out
Action
13 Get Produced Connection
Path Length
14 Get Produced Connection
Path
BYTE Defines the Message Group(s) across
which productions and consumptions
associated with this Connection occur.
UINT Maximum number of bytes transmitted
across this Connection.
UINT Maximum number of bytes received across
this Connection.
Connection.
USINT Defines how to handle Inactivity/Watchdog
timeouts.
UINT Number of bytes in the
production_connection_path attribute.
Array of
USINT
Specifies the Application Object(s) whose
data is to be produced by this Connection
Object. See DeviceNet Specification
Volume 1 Appendix I.
Publication GMSI10-UM005C-EN-P - May 2010
Page 100

92 DeviceNet Objects
Table C.15 Connection Object Instance Attributes
Access
Attr ID
Rule Name Data Type Description
15 Get Consumed Connection
Path Length
16 Get Consumed Connection
Path
17 Get Production Inhibit Time UINT Defines minimum time between new data
UINT Number of bytes in the
consumed_connection_path attribute.
Array of
USINT
Specifies the Application Object(s) that are
to receive the data consumed by this
Connection Object. See DeviceNet
Specification Volume 1 Appendix I.
production.
Services
Table C.16 Connection Object Services
Service
Code Class/Instance Usage Name
05
0E
10
h
h
h
Instance Reset
Instance Get_Attribute_Single
Instance Set_Attribute_Single
Discrete Input Point Object
(Class ID 08
)
H
Table C.17 Discrete Input Object Class Attributes
Access
Attr ID
1 Get Revision UINT Revision of the
Rule Name Data Type Description Semantics
The Discrete Input Point Object stores information about the value of the
Setpoint Multiplier signal.
Class Attributes
2
implemented object.
Publication GMSI10-UM005C-EN-P - May 2010
 Loading...
Loading...