

Page 1
All information contained in these materials, including products and product specifications,
represents information on the product at the time of publication and is subject to change by
Renesas Electronics Corp. without notice. Please review the latest information published by
Renesas Electronics Corp. through various means, including the Renesas Electronics Corp.
website (http://www.renesas.com).
Linux Interface
Specification
Yocto recipe Start-Up Guide
User’s Manual: Software
Rev2.12 Dec. 2020
RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C
User
’
s Manual
www.renesas.com
R8A77420
R8A77430
R8A77440
R8A77450
R8A77470
Page 2
How to Use This Manual
[Readers]
This manual is intended for engineers who develop products which use the RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E,
RZ/G1C processors.
[Purpose]
This manual is intended to give users an understanding of the functions of the RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E,
RZ/G1C processor device driver and to serve as a reference for developing hardware and software for systems that
use this driver.
[How to Read This Manual]
It is assumed that the readers of this manual have general knowledge in the fields of electrical
Engineering, logic circuits, microcontrollers, and Linux.
→ Read this manual in the order of the CONTENTS.
To understand the functions of a multimedia processor for RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C.
→ See the RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C User’s Manual.
To know the electrical specifications of the multimedia processor for RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E,
RZ/G1C.
→ See the RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Data Sheet.
[Conventions]
The following symbols are used in this manual.
Data significance: Higher digits on the left and lower digits on the right
Note: Footnote for item marked with Note in the text
Caution: Information requiring particular attention
Remark: Supplementary information
Numeric representation: Binary ... ××××, 0b××××, or ××××B
Decimal ... ××××
Hexadecimal ... 0x×××× or ××××H
Data type: Word … 32 bits
Half word ... 16 bits
Byte ... 8 bits
Trademark
All trademarks and registered trademarks are the property of their respective owner
・ Official name of Windows® is Microsoft® Windows® Operating System.
・ Microsoft and Windows are trademarks or registered trademarks of Microsoft Corporation, in the United States
and/or other countries.
・ ARM® is a registered trademark or a trademark of ARM Company in the United States and/or other countries.
・ Linux® is registered is trademark or registered trademark of Linus Torvalds, in the United States and/or other countries.
・ Ubuntu® is trademark or registered trademark of Canonical Limited, in the United Kingdom and/or other countries.
・ Qt® is trademark or registered trademark of The Qt Company Ltd, in the United States and/or other countries.
・ Trademark and registered trademark symbols (® and ™) are sometimes omitted in this document.
Page 3

Table of Contents
Introduction ............................................................................................................................................ 1
1. RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Linux BSP package files ..................................... 2
1.1 Reference (RZ/G1H) ................................................................................................................................................. 2
1.2 Reference (RZ/G1M) ................................................................................................................................................ 2
1.3 Reference (RZ/G1N) ................................................................................................................................................. 2
1.4 Reference (RZ/G1E) ................................................................................................................................................. 3
1.5 Reference (RZ/G1C) ................................................................................................................................................. 3
2. ENVIRONMENTAL REQUIREMENT ........................................................................................... 4
2.1 Setting of parts ................................ ................................................................................................ .......................... 4
2.2 Setting of dip switch ................................................................................................................................................. 6
3. Building Instructions .......................................................................................................................... 7
3.1 Common instructions ................................ ................................ ................................................................ ................ 7
3.2 Build images with demo packages .......................................................................................................................... 10
3.3 Build images without demos package ..................................................................................................................... 15
4. Confirm starting of U-Boot and Linux ............................................................................................ 17
5. Exporting Toolchains ....................................................................................................................... 23
6. Memory map .................................................................................................................................... 25
7. How to write binary file by TFTP .................................................................................................... 31
8. U-Boot command ............................................................................................................................. 34
9. Appendix .......................................................................................................................................... 35
9.1 IPMMU Example ................................ ................................................................................................ .................... 35
Page 4

R01US0227EJ0212 Rev2.12 Page 1 of 37
Dec 31, 2020
Introduction
This start-up guide explains RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Yocto recipe package files, the system
environments, the make method of kernel, the operating of U-Boot and so on.
This product RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Yocto recipe is a basic package to operate built-in Linux
and basic middleware on the iW-RainboW-G21D RZ/G1H Qseven Development Platform, iW-RainboW-G20D
RZ/G1M Qseven Development Platform, iW-RainboW-G20D RZ/G1N Qseven Development Platform, iW-RainboWG22D RZ/G1E SODIMM Development Platform and iW-RainboW-G23S RZ/G1C Single Board Computer. Please
contact Renesas Electronics person who provided this product to you in case of questions.
Page 5
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 2 of 37
Dec 31, 2020
1. RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Linux BSP package files
This Yocto recipe will be taken
The U-Boot source code from:
git://github.com/renesas-rz/renesas-u-boot-cip.git;branch=2013.01.01/rzg1-iwave
RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Linux source code from:
https://github.com/renesas-rz/renesas-cip.git;branch=v4.4.x-cipy (for normal linux)
https://github.com/renesas-rz/renesas-cip.git;branch=v4.4.x-cipy-rt (for realtime linux)
1.1 Reference (RZ/G1H)
Document name
Version
Date
RZ/G1H User's Manual: Hardware
Rev.1.00
2016.09.30
RZ/G Series, User’s Manual: Hardware
Rev.1.00
2016.09.30
iW-RainboW-G21M RZ/G1H Qseven SOM Hardware User Guide
-
-
iW-RainboW-G21D RZ/G1H Qseven Development Platform Hardware User Guide
-
-
1.2 Reference (RZ/G1M)
Document name
Version
Date
RZ/G1M User's Manual: Hardware
Rev.1.00
2016.09.30
RZ/G Series, User’s Manual: Hardware
Rev.1.00
2016.09.30
iW-RainboW-G20M RZ/G1M Qseven SOM Hardware User Guide
-
-
iW-RainboW-G20D RZ/G1M Qseven Development Platform Hardware User
Guide
-
-
1.3 Reference (RZ/G1N)
Document name
Version
Date
RZ/G1N User's Manual: Hardware
Rev.1.00
2016.09.30
RZ/G Series, User’s Manual: Hardware
Rev.1.00
2016.09.30
iW-RainboW-G20M RZ/G1N Qseven SOM Hardware User Guide
-
-
iW-RainboW-G20D RZ/G1N Qseven Development Platform Hardware User Guide
-
-
Page 6
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 3 of 37
Dec 31, 2020
1.4 Reference (RZ/G1E)
1.5 Reference (RZ/G1C)
Document name
Version
Date
RZ/G1C User's Manual: Hardware
Rev.1.00
2017.10.13
RZ/G Series, User’s Manual: Hardware
Rev.1.00
2016.09.30
iW-RainboW-G23S RZ/G1C SBC Hardware User Guide
-
-
Document name
Version
Date
RZ/G1E User's Manual: Hardware
Rev.1.00
2016.09.30
RZ/G Series, User’s Manual: Hardware
Rev.1.00
2016.09.30
iW-RainboW-G22M RZ/G1E SODIMM SOM Hardware User Guide
-
-
iW-RainboW-G22M RZ/G1E SODIMM Development Kit Hardware User Guide
-
-
Page 7
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 4 of 37
Dec 31, 2020
2. ENVIRONMENTAL REQUIREMENT
2.1 Setting of parts
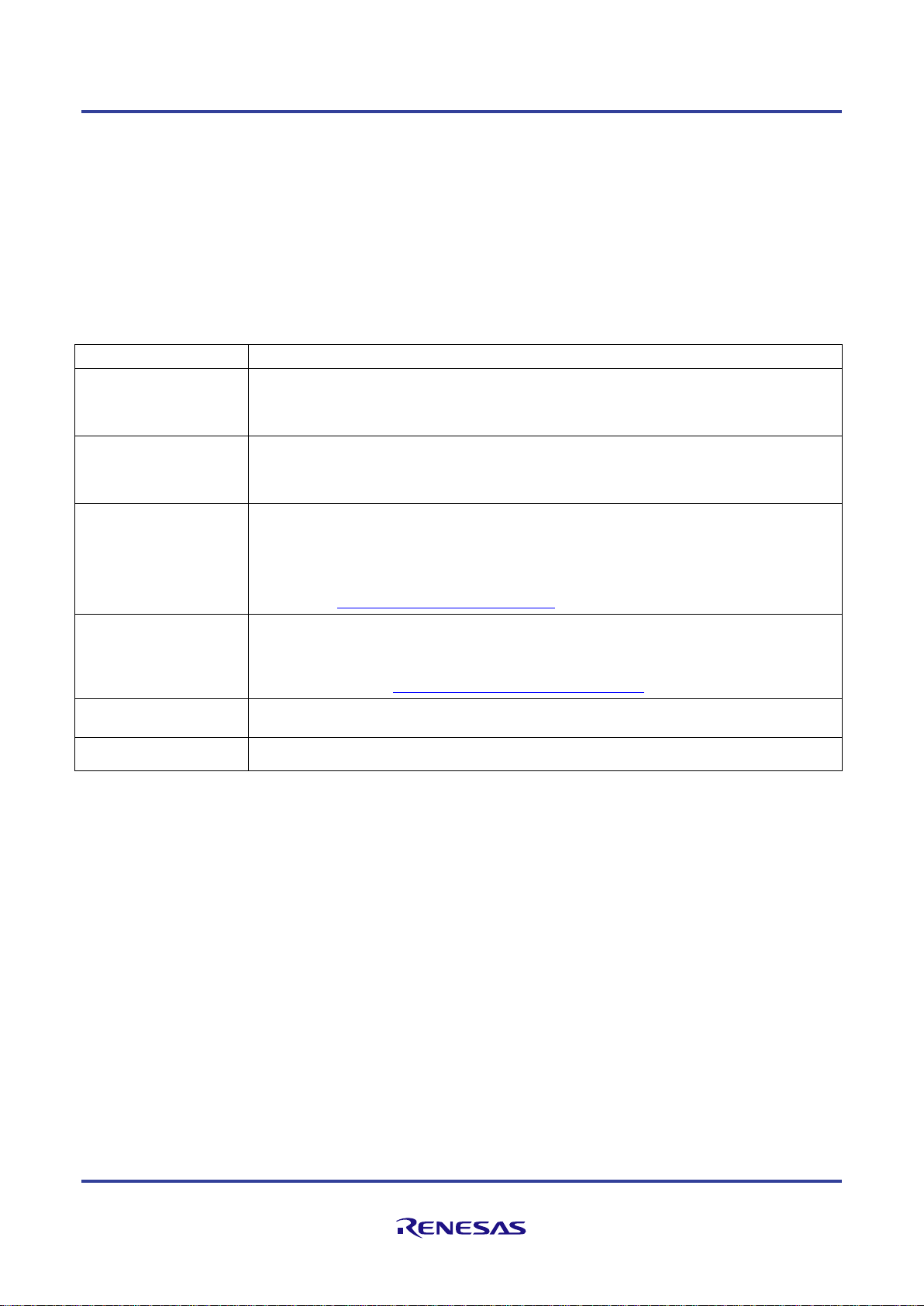
Host PC and terminal software are necessary for the operation of this product. Furthermore, Ethernet cable is required to
use NFS mount function. Please refer to Table 1.
Table 1 RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Linux BSP Environmental Requirement
Equipment
Explanation
Linux Host PC
Ubuntu 16.04 LTS is recommended as OS
It is used as building and debugging environment.
It is used as TFTP server and NFS server.
Windows Host PC
Windows 7 or 10 are recommended as OS.
It is used as debugging environment.
Terminal software and VCP driver are executed.
Terminal software
Please use following software 1) or 2).
1) Hyperterm (Included in WindowsXP)
2) TeraTerm
(Confirmed with Japanese version of Tera Term 4.72
Available at http://sourceforge.jp/projects/ttssh2 )
VCP driver
Please install following VCP driver to Windows Host PC before you connect Windows Host
PC and the RZ/G1 board.
Latest VCP Driver for Windows:
Available at http://www.ftdichip.com/Drivers/VCP.htm
TFTP server software
It is used when SPI Flash is written by U-Boot or zImage/uImage is downloaded.
NFS server software
It is used when File system is mounted by NFS.
Page 8
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 5 of 37
Dec 31, 2020
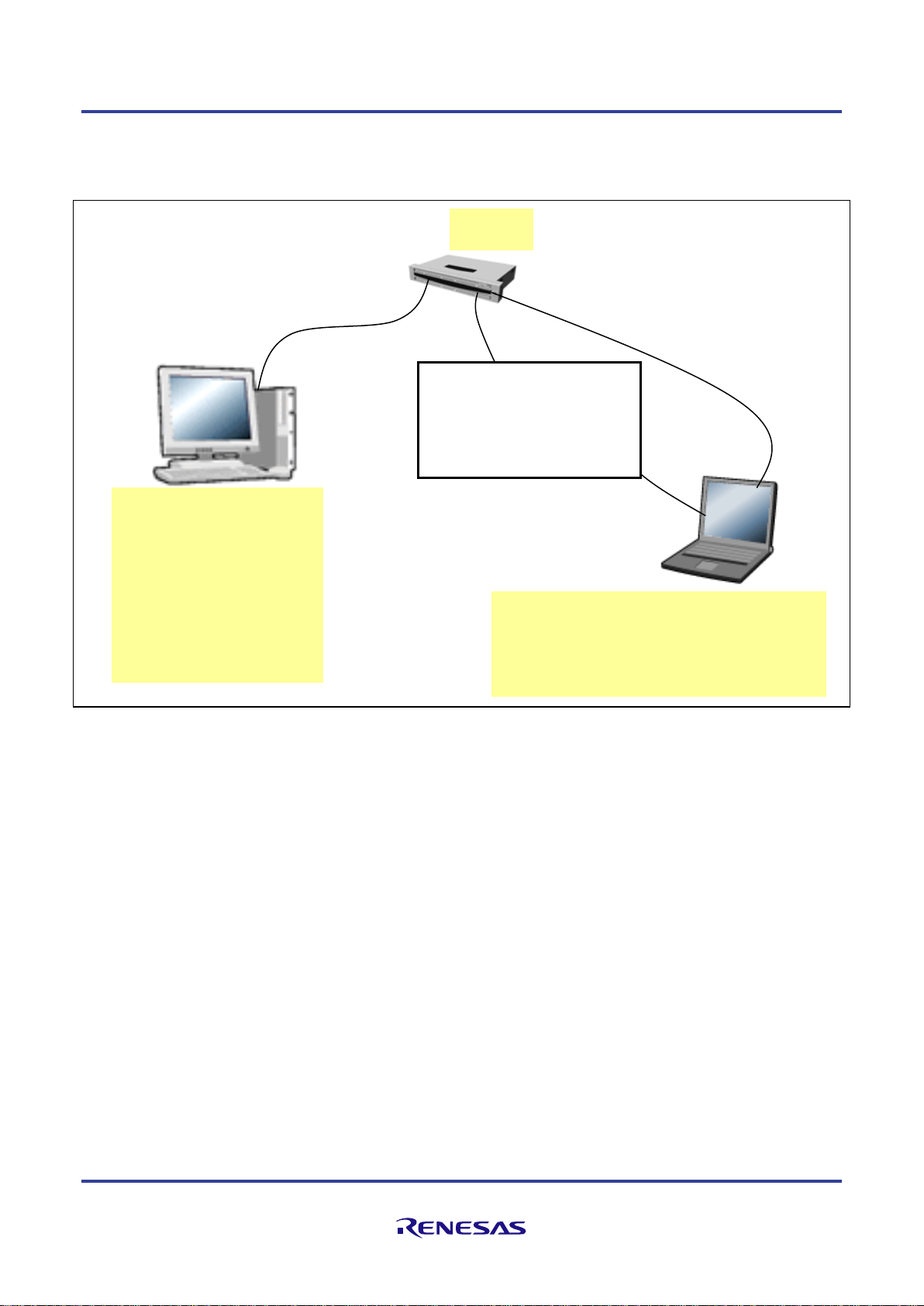
Recommended Environment
The following shows a Recommended Environment.
Figure 1 Recommended Environment for RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C Linux BSP
Note) Functions in covered with () are optional.
Hub
[Linux Host PC]
TFTP server
NFS server
Straight Ethernet cable
USB cable (type A to
mini/micro AB)
[Windows7 Host PC]
Terminal software to display console
(ssh to control Linux Host)
(Straight Ethernet cable)
RZ/G1H, RZ/G1M, RZ/G1N
Qseven Development Platform,
RZ/G1E SODIMM
Development Platform,
RZ/G1C SBC
Page 9
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 6 of 37
Dec 31, 2020
2.2 Setting of dip switch
The setting of RZ/G1H, RZ/G1M, RZ/G1N Qseven Development Platform's dip switches is shown the following Table
2. Please refer to “iW-RainboW-G21D RZ/G1H Qseven Development Kit Hardware User Guide”, “iW-RainboW-G20D
RZ/G1M RZ/G1N Qseven Development Kit Hardware User Guide” and “iW-RainboW-G22D-SODIMM RZ/G1E
SODIMM Development Kit Hardware User Guide” for details.
Table 2 setting of Dip switches (RZ/G1H, RZ/G1M, RZ/G1N)
Switch2
Bits
Switch2
Bit Name
Description
OFF
ON
1
BIOS_DISABLE#
-
Set
2
BATLOW#
-
Set
3
LID_BTN#
-
Set
4
USB_SELECT
-
Set
5
CODEC_SELECT
-
Set
6
PCIe_SELECT
Set - 7
DEBUG_SELECT
-
Set
8
USB_ID
Set
-
Note) SW2 Bit 1 to Bit 5 are not used in RZ/G1H/G1M/G1N carrier board.
Table 3 setting of Dip switches (RZ/G1E)
Switch4
Bits
Switch4
Pin Name
Description
OFF
ON
1
GPIO974(GP1_14)
-
Set
2
GPIO865(GP4_1)
Set
-
Note) iW-RainboW-G23S RZ/G1C Single Board Computer does not have Dip switch.
Page 10
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 7 of 37
Dec 31, 2020
3. Building Instructions
You can build BSP by using Yocto Project. Please execute following steps in $WORK directory on Linux Host PC.
Filesystem by making following instruction is the one for testing current BSP package in Renesas. Please note that
Renesas has not been verified with any other build configuration or modified recipes except “core-image-weston”
configuration which is based on upstream Yocto Project deliverables and some additional packages correspond to
gstreamer.
Note) Renesas executed following instructions with clean $WORK/build directory. You may use wipe-sysroot and/or
bitbake -c cleansstate to reflect modifications of configuration files for Recipe as in open source Yocto Project’s
standards, however Renesas strongly recommend to use recipe with clean $WORK/build directory for each
configurations because there are some implicit dependency for header files exist to keep compatibility between
application build scheme with/without RZ/G Multimedia Package.
If you want to build image with demo packages, please follow the instructions in 3.1, then go to 3.2. If you want to build
image without demo packages, please execute 3.1 and 3.3.
3.1 Common instructions
Step 1 installation of required commands
Ubuntu is used as Linux Host PC since Yocto Project Quick Start specifies Ubuntu as one of the distributions. In case of
that you can install the required commands as follows.
Please refer to yocto website for detail:
https://www.yoctoproject.org/docs/2.4.2/yocto-project-qs/yocto-project-qs.html
Note) There is a bitbake command in $WORK/poky/scripts/. Command path is available after step 6.
Note) When you use terminal interactions to build such as menuconfig under non-X terminal (ssh, etc.), please install
“screen” command package to Host PC
Note) Below commands are required in case of building HTML5 version
$ sudo apt-get install autoconf2.13 clang llvm clang-3.9 llvm-3.9
$ sudo apt-get install gawk wget git-core diffstat unzip texinfo gcc-multilib \
build-essential chrpath socat cpio python python3 \
python3-pip python3-pexpect \
xz-utils debianutils iputils-ping libsdl1.2-dev xterm
Page 11
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 8 of 37
Dec 31, 2020
Step 2 download of required files
Required files (poky, meta-openembedded, meta-linaro, meta-renesas, meta-qt5) are downloaded by git clone.
Below files are required in case of building HTML5 version
$ export WORK=<path-to-your-build-directory>
$ mkdir $WORK
$ cd $WORK
$ git clone git://git.yoctoproject.org/poky
$ git clone git://git.openembedded.org/meta-openembedded
$ git clone git://git.linaro.org/openembedded/meta-linaro.git
$ git clone https://github.com/meta-qt5/meta-qt5.git
$ git clone https://github.com/renesas-rz/meta-renesas
$ git clone https://github.com/webdino/meta-gecko-embedded.git
$ git clone -b firefox-60esr https://github.com/webdino/meta-browser.git
$ git clone -b jethro-14.0.1_rust_1.24.1 https://github.com/webdino/metarust.git
Page 12
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 9 of 37
Dec 31, 2020
Step 3 checkout and cherry-pick patches
Please checkout available version of each git clone.
Note) tmp is a temporary name of a local branch. We can use checkout command without branch. Please note that HEAD
refers directly to commit (detached HEAD).
$ cd $WORK/poky
$ git checkout -b tmp 342fbd6a3e57021c8e28b124b3adb241936f3d9d
$ cd $WORK/meta-openembedded
$ git checkout -b tmp dacfa2b1920e285531bec55cd2f08743390aaf57
$ cd $WORK/meta-linaro
$ git checkout -b tmp 75dfb67bbb14a70cd47afda9726e2e1c76731885
$ cd $WORK/meta-qt5
$ git checkout -b tmp c1b0c9f546289b1592d7a895640de103723a0305
$ cd $WORK/meta-renesas
Please choose a specific version
e.g. If BSP version is v2.1.1 (support all RZ/G1H,M,N,E,C)
$ git checkout certified-linux-v2.1.1
[Tag name : Feature]
certified-linux-v2.1.x : support normal linux
certified-linux-v2.1.x-rt : support realtime linux
Page 13
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 10 of 37
Dec 31, 2020
3.2 Build images with demo packages
When you use demo packages (Multimedia and Graphics application for demonstration) from Renesas, please execute as
following steps. Otherwise please skip this section and go to section 3.3.
Step 4 download demo packages, checkout and cherry-pick patches
$ cd $WORK
$ git clone https://github.com/renesas-rz/meta-rzg-demos
$ cd $WORK/meta-rzg-demos
Please choose a specific version.
e.g. If BSP version is v2.1.1
$ git checkout certified-linux-v2.1.1
[Tag name : Feature]
certified-linux-v2.1.x : support normal and realtime linux
Page 14

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 11 of 37
Dec 31, 2020
Step 5 copy RZ/G Multimedia Package into recipe directory structure Download and extract RZ/G Multimedia Package link on RZ/G Marketplace:
America: https://mp.renesas.com/en-us/rzg/marketplace/linux_package/index.html
Europe : https://mp.renesas.com/en-eu/rzg/marketplace/linux_package/index.html
Asia : https://mp.renesas.com/en-sg/rzg/marketplace/linux_package/index.html
Japan : https://mp.renesas.com/ja-jp/rzg/marketplace/linux_package/index.html
Copy downloaded package into a folder and extract the downloaded package then please execute following instruction:
To use RZ/G Multimedia Package from Renesas, please copy deliverables of those software into recipe directory
structure. Renesas provide shell script to copy those software.
Step 6 execute source command
Please execute source command with oe-init-build-env for setting environment.
$ cd $WORK/meta-renesas/meta-rzg1
$ sh copy_mm_software_lcb.sh $WORK/MMP
$ sh copy_gfx_software_rzg1h.sh $WORK/MMP (for RZ/G1H)
$ sh copy_gfx_software_rzg1m.sh $WORK/MMP (for RZ/G1M)
$ sh copy_gfx_software_rzg1n.sh $WORK/MMP (for RZ/G1N)
$ sh copy_gfx_software_rzg1e.sh $WORK/MMP (for RZ/G1E)
$ sh copy_gfx_software_rzg1c.sh $WORK/MMP (for RZ/G1C)
$ mkdir $WORK/MMP
$ cp RZG_Series_*_Software_Package* $WORK/MMP
$ cd $WORK/MMP
$ unzip RZG_Series_Software_Package_for_Linux*.tar.gz.zip
$ unzip RZG_Series_Software_Package_of_Linux_Drivers*.tar.gz.zip
$ cd $WORK
$ source poky/oe-init-build-env
Page 15
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 12 of 37
Dec 31, 2020
Step 7 copy bblayers.conf and local.conf
Please copy configuration files from demo packages.
(1) <board> is board name: iwg21m (iWave RZ/G1H), iwg20m-g1m (iWave RZ/G1M), iwg20m-g1n (RZ/G1N),
iwg22m (iWave RZ/G1E), iwg23s (iWave RZ/G1C).
Note) When you have to take care about the hardware computation resource of HOST PC, please review and modify
definitions for capacity limitation, such as “BB_NUMBER_THREADS” or “PARALLEL_MAKE” on
$WORK/build/conf/local.conf, and also please review timeout definitions of package download (wget, etc.) described in
$WORK/poky/meta/conf/bitbake.conf.
Note) It’s reported some open source toolchain for HOST PC has issues on parallel build (make 3.81 e.g.), so if you have
dependency error while in build sequence (such as the compilation error on unsettled package for each build), please
review definitions for capacity limitation described in above. For example, reduce the number of parallel make with
‘PARALLEL_MAKE = “-j 1” ’ which described in $WORK/conf/local.conf. And also, please review the number of that
in case of memory starvation occurred in a HOST PC which has many CPU Cores.
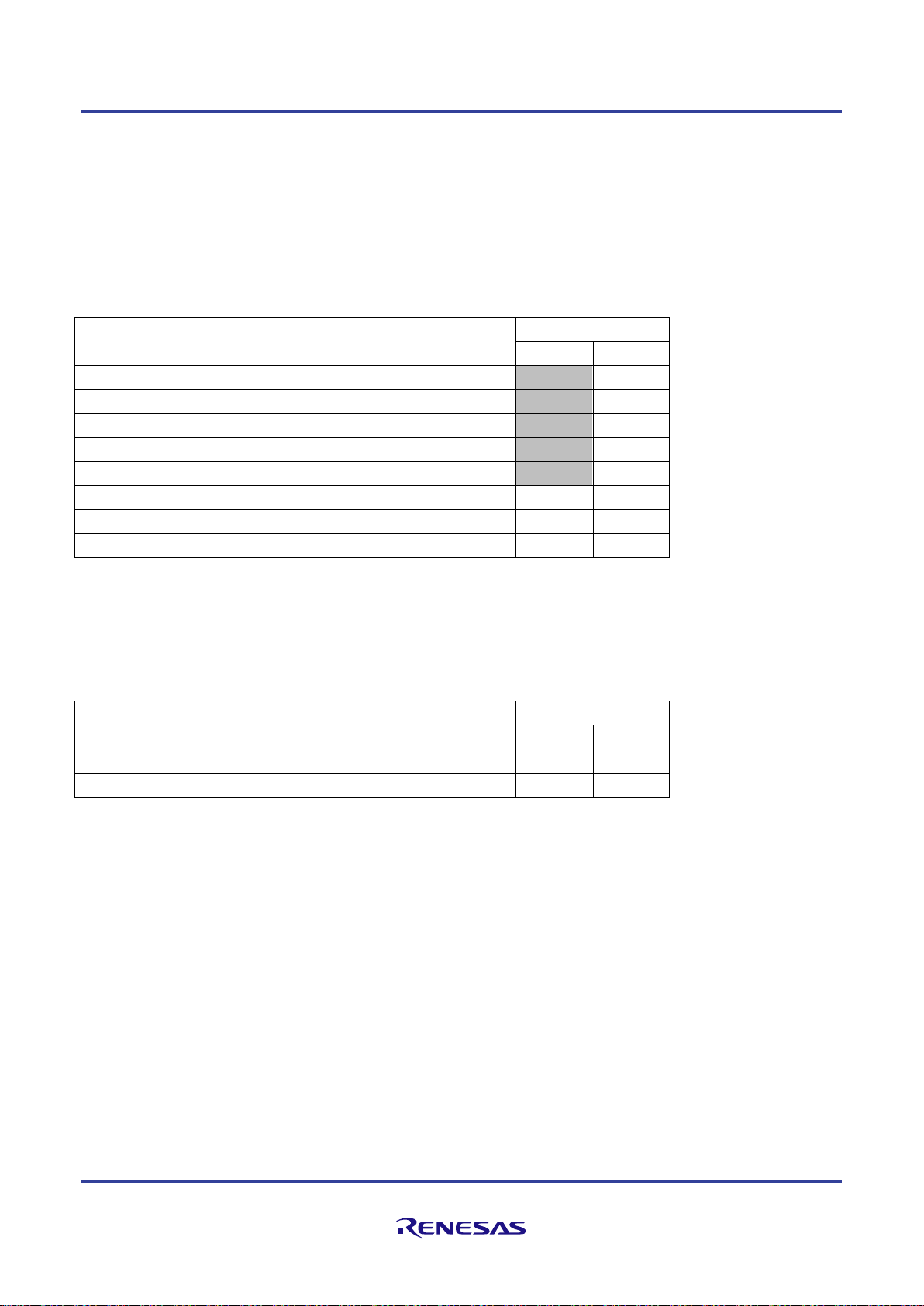
Step 8 enable Multimedia package
Please modify configurations in $WORK/build/conf/local.conf by following instructions
The following standard multimedia packages are enabled
No.
Functions
Explanation
1
MMNGR
Memory manager driver & shared libraries
2
S3CTRL driver
S3 cache controller driver & shared libraries
3
FDPM driver
FDP driver & shared libraries
4
VSPM driver
VSP driver & shared libraries
5
UVCS
UVCS Common Engine Library, UVCS Decode Engine Library
6
VCP3
VCP3 common/core parts
7
OMX
OMX common parts
8
H.264
H264 decoder
H264 encoder
$ cp $WORK/meta-rzg-demos/meta-rzg1/<demo-packagesname>/template/<board>
(1)
/bblayers.conf $WORK/build/conf/bblayers.conf
$ cp $WORK/meta-rzg-demos/meta-rzg1/<demo-packagesname>/template/<board>
(1)
/local.conf $WORK/build/conf/local.conf
Page 16

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 13 of 37
Dec 31, 2020
To enable optional multimedia functions, please add DISTRO_FEATURES_append to $WORK/build/conf/local.conf as
DISTRO_FEATURES_append = “ <function name>”.
Note) These configurations exist near the end of local.conf.
Note) DISTRO_FEATURES_append are commented out by the default. To enable functions, please uncomment it.
For example
[Disable (default)]
#DISTRO_FEATURES_append = " h264avcenc_lib"
[Enable]
DISTRO_FEATURES_append = " h264avcenc_lib"
Page 17

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 14 of 37
Dec 31, 2020
Step 9 building with bitbake
Please build as follows. The file system (core-image-weston-<supported board name>.tar.bz2) is created in
$WORK/build/tmp/deploy/images/<supported board name>/ directory.
Note) <supported board name> is the one of the following: iwg21m (iWave RZ/G1H), iwg20m-g1m (iWave RZ/G1M),
iwg20m-g1n (RZ/G1N), iwg22m (iWave RZ/G1E), iwg23s (iWave RZ/G1C).
Note) Build by bitbake might need several hours under the influence of Linux Host PC performance and network
environment.
Note) The bitbake downloads some package while building. Then the bitbake might stop for network timeout or link
error. In this case, please get applicable package in $WORK/build/downloads directory whenever build stops by wget
command, or please review timeout definitions of package download (wget, etc.) described in
$WORK/poky/meta/conf/bitbake.conf.
Note) It’s reported some open source toolchain for HOST PC has issues on parallel build (make 3.81 e.g.), so if you have
dependency error while in build sequence (such as the compilation error on unsettled package for each build), please
review definitions for capacity limitation described in Step 7. For example, reduce the number of parallel make with
‘PALLARLEL_MAKE = “-j 1” ’ which described in $WORK/build/conf/local.conf.
Note) When you use a configuration for Wayland, following messages would be displayed. It’s not the issue because it
not used mesa in Wayland environment but just a multiple dependency description exist which designate same submodules of mesa.
if you need to disable above messages, please add a following line to local.conf
If you need to suppress above messages, please add a following line to local.conf
NOTE: multiple providers are available for virtual/mesa (mesa, mesa-gl)
NOTE: consider defining a PREFERRED_PROVIDER entry to match virtual/mesa
NOTE: multiple providers are available for virtual/libgl (mesa, mesa-gl)
NOTE: consider defining a PREFERRED_PROVIDER entry to match virtual/libgl
NOTE: multiple providers are available for runtime libgl (mesa, mesa-gl)
NOTE: consider defining a PREFERRED_PROVIDER entry to match libgl
$ cd $WORK/build
$ bitbake core-image-weston
BBMASK .= "|mesa-gl"
Page 18

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 15 of 37
Dec 31, 2020
3.3 Build images without demos package
Step 4 copy RZ/G Multimedia Package into recipe directory structure
Download and extract RZ/G Multimedia Package link on RZ/G Marketplace:
America: https://mp.renesas.com/en-us/rzg/marketplace/linux_package/index.html
Europe : https://mp.renesas.com/en-eu/rzg/marketplace/linux_package/index.html
Asia : https://mp.renesas.com/en-sg/rzg/marketplace/linux_package/index.html
Japan : https://mp.renesas.com/ja-jp/rzg/marketplace/linux_package/index.html
Copy downloaded package into a folder and extract the downloaded package then please execute following instruction:
To use RZ/G Multimedia Package from Renesas, please copy deliverables of those software into recipe directory
structure. Renesas provide shell script to copy those software.
Step 5 execute source command
Please execute source command with oe-init-build-env for setting environment.
Step 6 copy bblayers.conf and local.conf
Please copy configuration files for corresponding board. There are three options:
$ cd $WORK
$ source poky/oe-init-build-env
### 1. No GUI framework
$ cp $WORK/meta-renesas/meta-rzg1/templates/<board>
(1)
/*.conf ./conf
### 2. Enable Gecko (HTML5)
$ cp $WORK/meta-renesas/meta-rzg1/templates/<board>
(1)
/gecko/*.conf
./conf
### 3. Enable Qt
$ cp $WORK/meta-renesas/meta-rzg1/templates/<board>
(1)
/qt/*.conf ./conf
$ cd $WORK/meta-renesas/meta-rzg1
$ sh copy_mm_software_lcb.sh $WORK/MMP
$ sh copy_gfx_software_rzg1h.sh $WORK/MMP (for RZ/G1H)
$ sh copy_gfx_software_rzg1m.sh $WORK/MMP (for RZ/G1M)
$ sh copy_gfx_software_rzg1n.sh $WORK/MMP (for RZ/G1N)
$ sh copy_gfx_software_rzg1e.sh $WORK/MMP (for RZ/G1E)
$ sh copy_gfx_software_rzg1c.sh $WORK/MMP (for RZ/G1C)
$ mkdir $WORK/MMP
$ cp RZG_Series_Evaluation_Software_Package* $WORK/MMP
$ cd $WORK/MMP
$ unzip RZG_Series_Evaluation_Software_Package_for_Linux*.tar.gz.zip
$ unzip RZG_Series_Evaluation_Software_Package_of_Linux_Drivers*.tar.gz.zip
Page 19

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 16 of 37
Dec 31, 2020
(1) <board> is board name which can be one of the following values: iwg21m (iWave RZ/G1H), iwg20m-g1m (iWave
RZ/G1M), iwg20m-g1n (RZ/G1N), iwg22m (iWave RZ/G1E), iwg23s (iWave RZ/G1C).
Note) When you have to take care about the hardware computation resource of HOST PC, please review and modify
definitions for capacity limitation, such as “BB_NUMBER_THREADS” or “PARALLEL_MAKE” on
$WORK/build/conf/local.conf, and also please review timeout definitions of package download (wget, etc.) described in
$WORK/poky/meta/conf/bitbake.conf.
Note) It’s reported some open source toolchain for HOST PC has issues on parallel build (make 3.81 e.g.), so if you have
dependency error while in build sequence (such as the compilation error on unsettled package for each build), please
review definitions for capacity limitation described in above. For example, reduce the number of parallel make with
‘PARALLEL_MAKE = “-j 1” ’ which described in $WORK/conf/local.conf. And also please review the number of that
in case of memory starvation occurred in a HOST PC which has many CPU Cores.
Step 7 building with bitbake
Please build as follows. The file system (core-image-weston-<supported board name>.tar.bz2) is created in
$WORK/build/tmp/deploy/images/<supported board name>/ directory.
Note) <supported board name> is the one of the following: iwg21m (iWave RZ/G1H), iwg20m-g1m (iWave RZ/G1M),
iwg20m-g1n (RZ/G1N), iwg22m (iWave RZ/G1E), iwg23s (iWave RZ/G1C).
Note) Build by bitbake might need several hours depending on the Linux Host PC performance and network
environment.
Note) The bitbake downloads some packages while building and may stop for network timeout or link error. In this case,
please get applicable package in $WORK/build/downloads directory whenever build stops by wget command, or please
review timeout definitions of package download (wget, etc.) described in $WORK/poky/meta/conf/bitbake.conf.
Note) It’s reported some open source toolchain for HOST PC has issues on parallel build (make 3.81 e.g.), so if you have
dependency error while in build sequence (such as the compilation error on unsettled package for each build), please
review definitions for capacity limitation described in Step 7. For example, reduce the number of parallel make with
‘PALLARLEL_MAKE = “-j 1” ’ which described in $WORK/conf/local.conf.
Note) When you use a configuration for Wayland, following messages would be displayed. It’s not the issue because it
not used mesa in Wayland environment but just a multiple dependency description exist which designate same submodules of mesa
If you need to suppress above messages, please add a following line to local.conf
NOTE: multiple providers are available for virtual/mesa (mesa, mesa-gl)
NOTE: consider defining a PREFERRED_PROVIDER entry to match virtual/mesa
NOTE: multiple providers are available for virtual/libgl (mesa, mesa-gl)
NOTE: consider defining a PREFERRED_PROVIDER entry to match virtual/libgl
NOTE: multiple providers are available for runtime libgl (mesa, mesa-gl)
NOTE: consider defining a PREFERRED_PROVIDER entry to match libgl
BBMASK .= "|mesa-gl"
$ cd $WORK/build
$ bitbake core-image-weston
Page 20

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 17 of 37
Dec 31, 2020
4. Confirm starting of U-Boot and Linux
Please connect iW-RainboW-G21D RZ/G1H Qseven Development Platform, iW-RainboW-G20D RZ/G1M Qseven
Development Platform, iW-RainboW-G20D RZ/G1N Qseven Development Platform, iW-RainboW-G22D RZ/G1E
SODIMM Development Platform, iW-RainboW-G23S RZ/G1C Single Board Computer, Windows Host PC with
terminal software for console and Linux Host PC with TFTP and NFS server as Figure 1. Then please confirm normal
starting of U-Boot and Linux with following step.
In case of RZ/G1H, RZ/G1M, RZ/G1N, Ethernet connector is J22 (Top), serial connector is J3, Display connector is J10,
SD slots are J2/J30, USB Host connectors are J2, J22 and J23 (Bottom), Audio out connector is J5, Audio in connector is
J6.
In case of RZ/G1E, Ethernet connector is J5, serial connector is J8, Display connectors is J23, SD slot is J2/J19, USB
Host connectors are J4 and J5, Audio IN/OUT connector is J3.
In case of RZ/G1C, Ethernet connector is J10, Display connectors is J12, SD slot is J15, USB Host connectors are 20 PIN
Expansion connector J7.
Step 1 setting Linux Host PC
Please install TFTP server and NFS server in Linux Host PC with apt-get command and so on. Please set
/etc/xinetd.d/tftp of TFTP server and /etc/exports of NFS server according to your environment.
Step 2 connect cable
Connect USB Host connector of Windows Host PC that is virtual COM port to J3 of RZ/G1H, RZ/G1M, RZ/G1N
Qseven Development Platform, J8 of RZ/G1E SODIMM Development Platform and 20 PIN Expansion connector of
RZ/G1C SBC with USB cable for displaying console.
Step 3 setting the terminal software
Activate the Terminal Software on Windows Host PC. Configure the Terminal Software on Windows Host PC as
followings. Please refer to Table 1 about the VCP driver for making a USB host connector into a virtual COM port.
For RZ/G1H, RZ/G1M, RZ/G1N Qseven Development Platform, RZ/G1E SODIMM Development Platform, RZ/G1C
SBC:
[setting value] baud rate 115200, 8bit data, parity none, stop 1 bit, flow control none
Page 21

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 18 of 37
Dec 31, 2020
Step 4 update U-boot
For more information about boot loader and its storage, please follow the instruction in the User Manual provided in the
board (RZ/G1H, RZ/G1M, RZ/G1N Qseven Development Platform, RZ/G1E SODIMM Development Platform, RZ/G1C
SBC).
Note:
Loader: iw_rainbow_*.bin
RZ/G1H: iw_rainbow_G21M_SPI_loader_v031.bin
RZ/G1M, RZ/G1N: iw_rainbow_g20m_SPI_loader_v020_ddr3.bin
RZ/G1E: iw_rainbow_G22M_SPI_loader_v031.bin
RZ/G1C: iW_RainboW_G23S_SPI_LOADER_V020_DDR3_E6300000_V100.bin
Kernel device tree: *.dtb
RZ/G1H: uImage-r8a7742-iwg21d-q7-dbcm-ca.dtb
RZ/G1M: uImage-r8a7743-iwg20d-q7-dbcm-ca.dtb
RZ/G1N: uImage-r8a7744-iwg20m.dtb
RZ/G1E: uImage-r8a7745-iwg22d-sodimm.dtb
RZ/G1C: uImage-r8a77470-iwg23s-sbc.dtb
Figure 2 Boot device memory layout
Page 22

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 19 of 37
Dec 31, 2020
This section explains the step by step procedure to flash the binaries into RZ/G1M/G1N SOM through JTAG
Debugger.
Note) Example for JTAG Debugger name: lauterbach, …
The prebuilt binaries are built by section 3.
Copy the JTAG debugger configuration file and the binary files uboot (uboot.bin), loader
(iw_rainbow_G21M_SPI_loader_v031.bin for RZ/G1H, iw_rainbow_g20m_SPI_loader_v020_ddr3.bin for
RZ/G1M, RZ/G1N, iw_rainbow_G22M_SPI_loader_v031.bin for RZ/G1E,
iW_RainboW_G23S_SPI_LOADER_V020_DDR3_E6300000_V100.bin for RZ/G1C) required for booting
RZ/G1M/G1N SOM into the SD card, insert this SD card into JTAG Debugger.
Open minicom for JTAG Debugger and Target board separately in host PC.
Power on the JTAG Debugger and then target board.
Once the JTAG Debugger is booted, set the following parameters in JTAG terminal to boot the target board.
To set the supervisor mode interrupts, execute the below command.
RZ/G1x > set cpsr 0x1D3
To set the stack pointer for loader, execute the below command.
RZ/G1x > set sp 0xE6303D00
To set the program counter for loader, execute the below command.
RZ/G1x > set pc 0xE6300000
To load loader binary image into memory from SD Card, execute the below command.
RZ/G1x > memory load card://loader.bin bin 0xE6300000
RZ/G1x > go
RZ/G1x > halt
To set the supervisor mode interrupts, execute the below command.
RZ/G1x > set cpsr 0x1D3
To set the stack pointer for u-boot, execute the below command.
RZ/G1x > set sp 0xE633FFFC
To set the program counter for u-boot, execute the below command.
o For RZ/G1H:
RZ/G1x > set pc 0xE8080000
o For RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C:
RZ/G1x > set pc 0xE6304000
To load loader.bin image into memory from SD Card, execute the below command.
o For RZ/G1H:
RZ/G1x > memory load card://u-boot.bin bin 0xE8080000
RZ/G1x > go
o For RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C:
RZ/G1x > memory load card://u-boot.bin bin 0xE6304000
RZ/G1x > go
Now, target board will boot and boot prints will appear in the target board console.
Stop in u-boot command prompt by pressing any key.
Once command prompt appears, execute the below command in JTAG board to halt the target board core.
RZ/G1x > halt
Page 23

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 20 of 37
Dec 31, 2020
Step 5 set U-Boot environment variables
Please start U-Boot by board reset. Please set and save environment variable as follows. If U-Boot is replaced from BSP
older version as YoctoRecipe Package v1.4.1, please set environment variables from default state after executing "env
default -a" command. Current U-Boot has bootm_low and bootm_size which are new environment variables for device
tree work area. It is necessary to reflect into environment save area of SPI Flash.
Note) Common device tree file (dtb) is used for both zImage and uImage.
=> setenv ethaddr xx:xx:xx:xx:xx:xx
=> setenv ipaddr 192.168.0.20
=> setenv serverip 192.168.0.1
(to use zImage)
=> setenv bootcmd 'tftp 0x40007fc0 zImage;tftp 0x40f00000 uImage-r8a7742iwg21d-q7-dbcm-ca.dtb;bootz 0x40007fc0 - 0x40f00000' (In case of
RZ/G1H)
=> setenv bootcmd 'tftp 0x40007fc0 zImage;tftp 0x40f00000 uImage-r8a7743iwg20d-q7-dbcm-ca.dtb;bootz 0x40007fc0 - 0x40f00000' (In case of RZ/G1M)
=> setenv bootcmd 'tftp 0x40007fc0 zImage;tftp 0x40f00000 uImage-r8a7744iwg20m.dtb;bootz 0x40007fc0 - 0x40f00000' (In case of RZ/G1N)
=> setenv bootcmd 'tftp 0x40007fc0 zImage;tftp 0x40f00000 uImage-r8a7745iwg22d-sodimm.dtb;bootz 0x40007fc0 - 0x40f00000' (In case of RZ/G1E)
=> setenv bootcmd 'tftp 0x40007fc0 zImage;tftp 0x40f00000 uImage-r8a77470iwg23s-sbc.dtb;bootz 0x40007fc0 - 0x40f00000' (In case of RZ/G1C)
(to use uImage)
=> setenv bootcmd 'tftp 0x40007fc0 uImage;tftp 0x40f00000 uImage-r8a7742iwg21d-q7-dbcm-ca.dtb;bootm 0x40007fc0 - 0x40f00000' (In case of
RZ/G1H)
=> setenv bootcmd 'tftp 0x40007fc0 uImage;tftp 0x40f00000 uImage-r8a7743iwg20d-q7-dbcm-ca.dtb;bootm 0x40007fc0 - 0x40f00000' (In case of
RZ/G1M)
=> setenv bootcmd 'tftp 0x40007fc0 uImage;tftp 0x40f00000 uImage-r8a7744iwg20m.dtb;bootm 0x40007fc0 - 0x40f00000' (In case of RZ/G1N)
=> setenv bootcmd 'tftp 0x40007fc0 uImage;tftp 0x40f00000 uImage-r8a7745iwg22d-sodimm.dtb;bootm 0x40007fc0 - 0x40f00000' (In case of RZ/G1E)
=> setenv bootcmd 'tftp 0x40007fc0 uImage;tftp 0x40f00000 uImager8a77470-iwg23s-sbc.dtb;bootm 0x40007fc0 - 0x40f00000' (In case of
RZ/G1C)
Page 24

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 21 of 37
Dec 31, 2020
Step 6 write Kernel device tree by U-Boot
If you would like to load Kernel device tree file (uImage-r8a7742-iwg21d-q7-dbcm-ca.dtb, uImage-r8a7743-iwg20d-q7dbcm-ca.dtb, uImage-r8a7744-iwg20m.dtb, uImage-r8a7745-iwg22d-sodimm.dtb, uImage-r8a77470-iwg23s-sbc.dtb)
from SPI Flash, please prepare as follows. If you would like to download from Linux Host PC with tftp, you don't need
following steps.
Please write Kernel device tree file to address 0x100000 of SPI Flash by U-Boot. Put the Kernel device tree file in root
directory of TFTP server.
Due to Data specs of SPI Flash, Size arguments in the following instructions are set to 0x400000 regardless of the size of
dtb file.
Step 7 change the bootargs by U-Boot
To change bootargs which passed to the kernel in boot sequence, please modify it by “setenv bootargs” command of uboot.
=> tftpboot 0x41000000 uImage-r8a7742-iwg21d-q7-dbcm-ca.dtb (In case of
RZ/G1H)
=> tftpboot 0x41000000 uImage-r8a7743-iwg20d-q7-dbcm-ca.dtb (In case of
RZ/G1M)
=> tftpboot 0x41000000 uImage-r8a7744-iwg20m.dtb (In case of RZ/G1N)
=> tftpboot 0x41000000 uImage-r8a7745-iwg22d-sodimm.dtb (In case of
RZ/G1E)
=> tftpboot 0x41000000 uImage-r8a77470-iwg23s-sbc.dtb (In case of
RZ/G1C)
sh_eth Waiting for PHY auto negotiation to complete.. done
sh_eth: 100Base/Full
Using sh_eth device
TFTP from server 192.168.0.1; our IP address is 192.168.0.20
Filename 'uImage-r8a7743-iwg20m.dtb'.
Load address: 0x41000000
Loading: #
357.4 KiB/s
done
Bytes transferred = 22334 (573e hex)
=> setenv bootargs console=ttySC2,115200n8 vmalloc=384M ip=192.168.0.20
:::::eth0 root=/dev/nfs nfsroot=192.168.0.1:/export/rfs rootwait' (In case of
RZ/G1H)
=> setenv bootargs console=ttySC0,115200n8 vmalloc=384M ip=192.168.0.20
root=/dev/nfs nfsroot=192.168.0.1:/export/rfs rootwait' (In case of RZ/G1M,
RZ/G1N)
=> setenv bootargs 'console=ttySC3,115200n8 vmalloc=384M ip=192.168.0.20
root=/dev/nfs nfsroot=192.168.0.1:/export/rfs rootwait' (In case of RZ/G1E)
=> setenv bootargs 'console=ttySC1,115200n8 vmalloc=384M ip=192.168.0.20
root=/dev/nfs nfsroot=192.168.0.1:/export/rfs rootwait' (In case of RZ/G1C)
=> saveenv
Page 25

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 22 of 37
Dec 31, 2020
Step 8 write Kernel (zImage/uImage) by U-Boot
If you would like to load Kernel (zImage/uImage) from SPI Flash, please prepare as follows. If you would like to
download from Linux Host PC with tftp, you don't need following steps.
Please write Kernel (zImage/uImage) to address 0x140000 of SPI Flash by U-Boot. Put the uImage in root directory of
TFTP server.
Please set U-Boot environment variable as follows.
Step 9 set file system
Please extract file system (core-image-weston-<supported board name>.tar.bz2). Please export /export directory of NFS
server.
Note) <supported board name> is the following: iwg21m (iWave RZ/G1H), iwg20m-g1m (iWave RZ/G1M), iwg20mg1n (RZ/G1N), iwg22m (iWave RZ/G1E), iwg23s (iWave RZ/G1C).
Note) Please use proper file system images, iwg21m for RZ/G1H, iwg20m-g1m for RZ/G1M, iwg20m-g1n for RZ/G1N,
iwg22m for RZ/G1E and iwg23s for RZ/G1C. And also please take attention to the package configurations which
defined in Section 3.
Step 10 start Linux
After board reset, U-Boot is started. After countdown, Linux boot messages are displayed. Please confirm login prompt
after Linux boot messages.
=> tftpboot 0x41000000 zImage(uImage)
=> setenv kern_size 0xXXXXXX (filesize of zImage/uImage roundup by
256KB boundary, for example “0x400000”)
=> sf probe
=> sf erase 0x140000 ${kern_size}
=> sf write 0x41000000 0x140000 ${kern_size}
(to use zImage)
=> setenv bootcmd 'sf probe;sf read 0x40007fc0 0x140000 ${kern_size};sf
read 0x40f00000 0x100000 0x40000;bootz 0x40007fc0 - 0x40f00000'
(to use uImage)
=> setenv bootcmd 'sf probe;sf read 0x40007fc0 0x140000 ${kern_size};sf
read 0x40f00000 0x100000 0x40000;bootm 0x40007fc0 - 0x40f00000'
=> saveenv
$ mkdir /export/rfs
$ cd /export/rfs
$ sudo tar xvf core-image-weston-<supported board name>.tar.bz2
Page 26
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 23 of 37
Dec 31, 2020
5. Exporting Toolchains
Please refer Documents from Yocto Project to export Toolchains such as
https://www.yoctoproject.org/docs/2.4.2/adt-manual/adt-manual.html
And please use build target of bitbake as “core-image-weston-sdk -c populate_sdk” to generate package.
Note) When you use “ld” directly but not via gcc (in case of building Kernel, Driver or u-boot), please disable
LDFLAGS with ‘export LDFLAGS=”” ’.
Note) Please do not use same shell environment to other compilation/debugging purpose (also make menuconfig of linux
kernel, e.g.) but cross compilation for RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E, RZ/G1C which shell environment with
“source” command to setup environment variables for the SDK. Because some environment variables for cross
compilation interferes execution of other tools on the same shell environment.
Note) Options for Compiler and its corresponds are same for each CPU core architecture (CortexA15 for RZ/G1H,
RZ/G1M, RZ/G1N, CortexA7 for RZ/G1H, RZ/G1E, RZ/G1C), however header files and libraries to be linked statically
are selected and assembled into SDK Toolchain Package according to the configurations of which are using for building
SDK Toolchain Package.
Example of instruction:
In following examples, it’s assumed that it’s already extracted and prepared recipe environment such as in the
instructions of Section 3 (must done just before execution of bitbake, at least). You may reuse $WORK/build while you
reuse same configuration after executing bitbake as in Section 3 for this purpose.
Step 1 configure architectures of Host PC which are installed this toolchain
When users of toolchain execute different architecture of Host PC other than build environment (x86_64 and i686),
please modify SDK_MACHINE description on $WORK/build/conf/local.conf
On $WORK/build/conf/local.conf
# This variable specified the architecture to build SDK/ADT items for and means
# you can build the SDK packages for architectures other than the machine you are
# running the build on (i.e. building i686 packages on an x86_64 host._
# Supported values are i686 and x86_64
#SDKMACHINE ?= "i686"
SDKMACHINE ?= "i686" (or " x86_64")
# When toolchain used in 32bit Host PC but building toolchain with x86_64
Page 27

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 24 of 37
Dec 31, 2020
Step 2 building toolchain package with bitbake
Step 3 Install toolchain on each Host PCs
Step 4 setup environment variables for each compilation on each Host PCs
Please setup environment variables as follows or integrate set-up sequence into your build script or Makefile.
$ cd $WORK/build
$ bitbake core-image-weston-sdk -c populate_sdk
$ cp tmp/deploy/sdk/poky-glibc-x86_64(or i686)-core-image-weston-sdkcortexa15hf-(vfp-)neon-toolchain- 2.4.2.sh <shared dir. where able to
access from each Host PCs> (for RZ/G1H, RZ/G1M, RZ/G1N)
$ cp tmp/deploy/sdk/poky-glibc-x86_64(or i686)-core-image-weston-sdkcortexa7hf-(vfp-)neon-toolchain- 2.4.2.sh <shared dir. where able to access
from each Host PCs> (for RZ/G1E, RZ/G1C)
(For RZ/G1H, RZ/G1M, RZ/G1N)
$ sudo <shared dir. where able to access from each Host PCs>/ poky-glibcx86_64(or i686)-core-image-weston-sdk-cortexa15hf-(vfp-)neon-toolchain-
2.4.2.sh
(For RZ/G1E, RZ/G1C)
$ sudo <shared dir. where able to access from each Host PCs>/ poky-glibcx86_64(or i686)-core-image-weston-sdk-cortexa7hf-(vfp-)neon-toolchain-
2.4.2.sh
[sudo] password for (INSTALL person): (password of your account)
Enter target directory for SDK (default: /opt/poky/2.4.2): (just a return)
Extracting SDK...done
Setting it up...done
SDK has been successfully set up and is ready to be used.
$ cd (Your working directory)
$ source /opt/poky/2.4.2/environment-setup-cortexa15hf(-vfp)-)neonpoky-linux-gnueabi (For RZ/G1H, RZ/G1M, RZ/G1N)
$ source /opt/poky/2.4.2/environment-setup-cortexa7hf(-vfp)-neon-pokylinux-gnueabi (For RZ/G1E, RZ/G1C)
$ export LDFLAGS=””
$ $CC (Your source code).c <optional FLAG>
Page 28

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 25 of 37
Dec 31, 2020
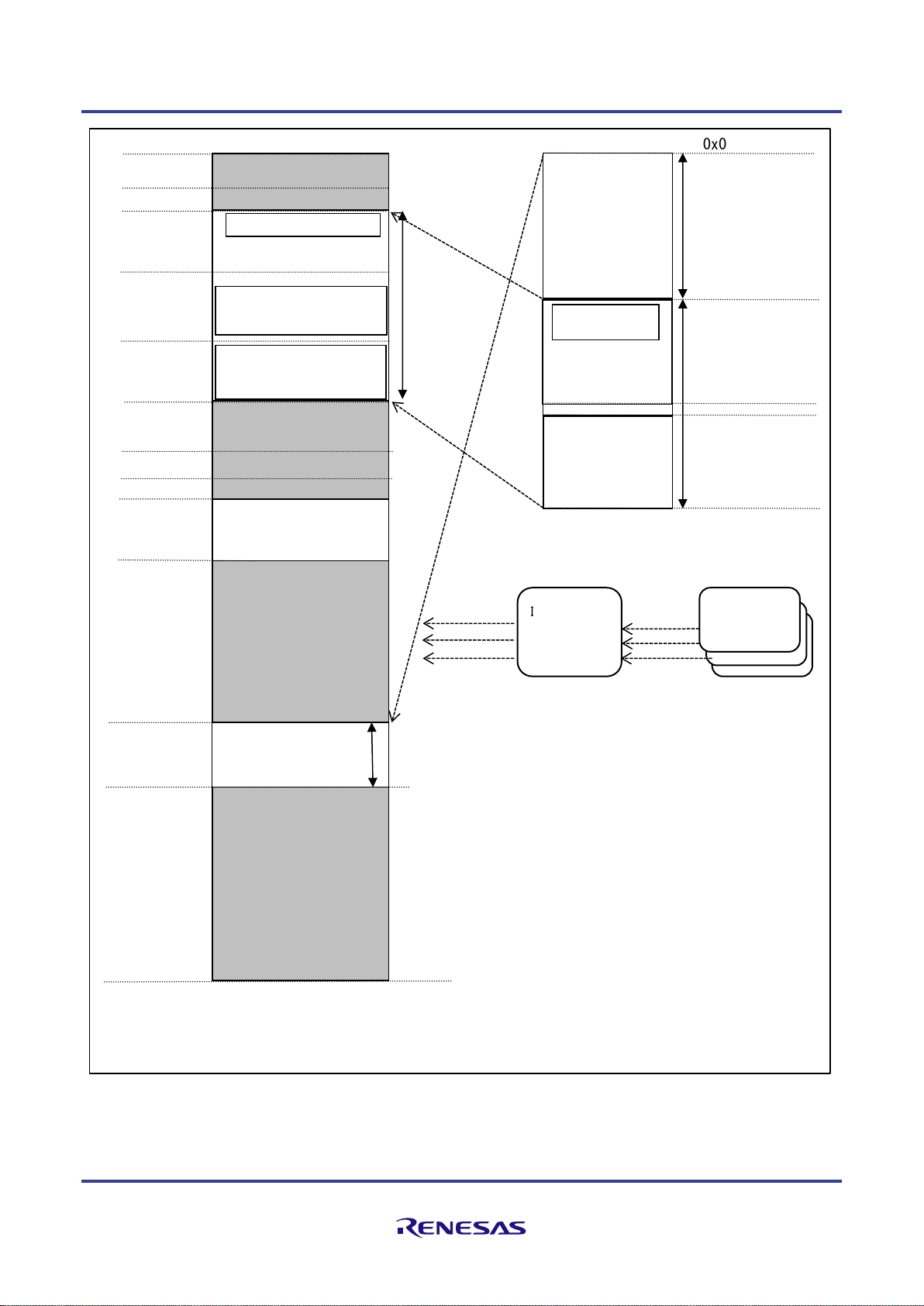
6. Memory map
Following Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 shows memory map of this RZ/G1H, RZ/G1M, RZ/G1N,
RZ/G1E, RZ/G1C Linux BSP package.
A saving area of the environment variable of U-Boot is address 0xc0000 of SPI Flash. If you would like to return default
value, please use "env default -a" command, after that save by the saveenv command.
Page 29

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 26 of 37
Dec 31, 2020
Figure 3: RZ/G1H memory map (Linux)
DDR3-SDRAM(1GB)
*3
lowmem
0x00000000
lowmem / DMA
(1GB) split
0x40000000
highmem
(1GB) split
CMA for MMP *2
(256MB)
IPMMU Address
translation
table
0xe0000000
0x01_00000000
0x57000000
CMA *1
(128 MB)
0x80000000
LBSC
PCI-exp
0xc0000000
Reserved
0x30000000
Physical area layout
I/O area
0x01_40000000
0x02_00000000
0x03_00000000
iW-RainboW-G21D
Not Support
user
0x00000000
0xe7800000
0xc0000000
vmalloc *4
0xe8000000
0xff800000
Mirrored from 0x40000000 0x80000000 (1GB)
Virtual area layout
kernel
user
p
IPMMU static version *5
p
p
HW IP 32 bit access
40 bit access
Adjusting points
*1 Assigned by Kernel Configuration CMA_SIZE_MBYTES [=256]
*2 Allocated by a function in kernel source
arch/arm/mach-shmobile/setup-rcar-gen2.c:rcar_gen2_reserve()
Equivalent to linux kernel unmanaged area of 3.4.x(yocto recipe
v0.5.0 or earlier ).
*3 Assigned by Kernel device tree source
arch/arm/boot/dts/r8a7742-iwg21m.dts:memory@xxxx
*4 Assigned by u-boot command
bootargs vmmaloc=384M
*5 Please refer to appendix
0x02_40000000
DDR3-SDRAM(1GB) *3
iW-RainboW-G21D
Not Support
iW-RainboW-G21D
Not Support
0xc0008000
kernel image
0x40008000 kernel image
0x70000000
Page 30
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 27 of 37
Dec 31, 2020
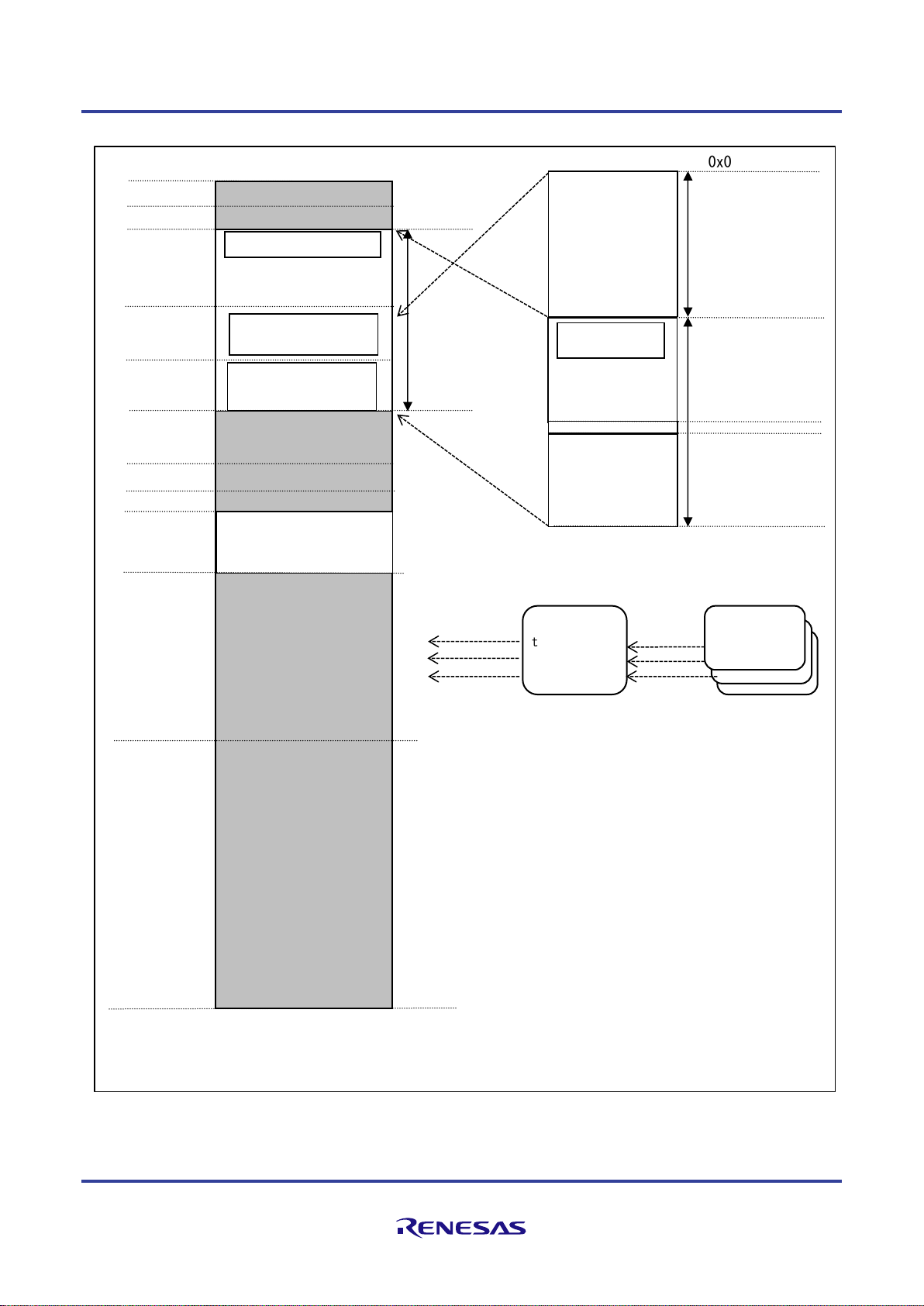
Figure 4: RZ/G1M memory map (Linux)
lowmem / DMA
(512MB) split
highmem
(512MB) split
CMA for MMP *2
(256MB)
CMA *1
(128MB)
LBSC
PCI-exp
Reserved
I/O area
iW-RainboW-G20D
Not Support
Mirrored from 0x40000000 0x60000000 (512MB)
iW-RainboW-G20D
Not Support
0x40008000 kernel image
iW-RainboW-G20D
Not Support
DDR3-SDRAM(512MB)
*3
Physical area layout
IPMMU Address
translation
table
p
IPMMU static version
*5
p
p
32 bit access
40 bit access
HW IP
Adjusting points
*1 Assigned by Kernel Configuration CMA_SIZE_MBYTES [=176]
*2 Allocated by a function in kernel source
arch/arm/mach-shmobile/setup-rcar-gen2.c:rcar_gen2_reserve()
Equivalent to linux kernel unmanaged area of 3.4.x(yocto recipe
v0.5.0 or earlier ).
*3 Assigned by Kernel device tree source
arch/arm/boot/dts/r8a7743-iwg20m.dtsi:memory@xxxx
*4 Assigned by u-boot command
bootargs vmmaloc=384M
*5 Please refer to appendix
DDR3-SDRAM(512MB)
*3
lowmem
user
0x00000000
0xe0000000
0xc0000000
vmalloc *4
0xe0800000
0xff800000
Virtual area layout
kernel
user
0xc0008000
kernel image
0x00000000
0x03_00000000
0x02_20000000
0x01_20000000
0x01_00000000
0xe0000000
0xc0000000
0x60000000
0x40000000
0x30000000
0x50000000
0x45000000
0x02_00000000
Page 31

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 28 of 37
Dec 31, 2020
Figure 5: RZ/G1N memory map (Linux)
lowmem
0x00000000
lowmem / DMA
(1024MB) linear
0x40000000
CMA for MMP *2
(256MB)
DDR3-SDRAM(1GB)
*3
IPMMU Address
translation
table
0xe0000000
0x01_00000000
0x5f000000
CMA *1
(128 MB)
0x70000000
0x80000000
LBSC
PCI-exp
0xc0000000
Reserved
0x30000000
Physical area layout
I/O area
0x01_40000000
0x02_00000000
0x03_00000000
iW-RainboW-G20D
Not Support
user
0x00000000
0xe7000000
0xc0000000
vmalloc *4
0xe7800000
0xff000000
Mirrored from 0x40000000 0x80000000 (1GB)
Virtual area layout
kernel
user
p
IPMMU static version *5
p
p
HW IP
32 bit access
40 bit access
Adjusting points
*1 Assigned by Kernel Configuration CMA_SIZE_MBYTES [=256]
*2 Allocated by a function in kernel source
arch/arm/mach-shmobile/setup-rcar-gen2.c:rcar_gen2_reserve()
Equivalent to linux kernel unmanaged area of 3.4.x(yocto recipe
v0.5.0 or earlier ).
*3 Assigned by Kernel device tree source
arch/arm/boot/dts/r8a7744-iwg20m.dts:memory@xxxx
*4 Assigned by u-boot command
bootargs vmmaloc=384M
*5 Please refer to appendix
iW-RainboW-G20D
Not Support
iW-RainboW-G20D
Not Support
0xc0008000
kernel image
0x40008000 kernel image
Page 32
Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 29 of 37
Dec 31, 2020
Figure 6: RZ/G1E memory map (Linux)
lowmem
0x00000000
lowmem / DMA
(512MB) linear
CMA for MMP *2
(256MB)
DDR3-SDRAM(512MB)
*3
IPMMU Address
translation
table
0xe0000000
0x01_00000000
0x54000000
CMA *1
(128MB)
0x5c000000
0x60000000
LBSC
Reserved
0xc0000000
Reserved
Physical area layout
I/O area
0x01_40000000
0x02_00000000
0x03_00000000
iW-RainboW-G22D
Not Support
user
0x00000000
0xe7000000
0xc0000000
vmalloc *4
0xe7800000
0xff000000
Mirrored from 0x40000000 0x80000000 (1GB)
Virtual area layout
kernel
user
p
IPMMU static version *5
p
p
HW IP
32 bit access
40 bit access
Adjusting points
*1 Assigned by Kernel Configuration CMA_SIZE_MBYTES [=128]
*2 Allocated by a function in kernel source
arch/arm/mach-shmobile/setup-rcar-gen2.c:rcar_gen2_reserve()
Equivalent to linux kernel unmanaged area of 3.4.x(yocto recipe
v0.5.0 or earlier ).
*3 Assigned by Kernel device tree source
arch/arm/boot/dts/r8a7745-iwg22m.dts:memory@xxxx
*4 Assigned by u-boot command
bootargs vmmaloc=384M
*5 Please refer to appendix
iW-RainboW-G22D
Not Support
iW-RainboW-G22D
Not Support
0xc0008000
kernel image
0x40008000 kernel image
Page 33

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 30 of 37
Dec 31, 2020
Figure 7: RZ/G1C memory map (Linux)
lowmem
0x00000000
lowmem / DMA, highmem
(512MB) linear
0x40000000
CMA for MMP *2
(256MB)
DDR3-SDRAM(512MB)
*3
IPMMU Address
translation
table
0xe0000000
0x01_00000000
0x48000000
CMA *1 (128MB)
0x50000000
0x60000000
LBSC
Reserved
0xc0000000
Reserved
0x30000000
Physical area layout
I/O area
0x01_40000000
0x02_00000000
0x03_00000000
iW-RainboW-G23S
Not Support
user
0x00000000
0xe7000000
0xc0000000
vmalloc *4
0xe7800000
0xff000000
Mirrored from 0x40000000 0x80000000 (1GB)
Virtual area layout
kernel
user
p
IPMMU static version
*5
p
p
HW IP 32 bit access
40 bit access
Adjusting points
*1 Assigned by Kernel Configuration CMA_SIZE_MBYTES [=128]
*2 Allocated by a function in kernel source
arch/arm/mach-shmobile/setup-rcar-gen2.c:rcar_gen2_reserve()
Equivalent to linux kernel unmanaged area of 3.4.x(yocto recipe
v0.5.0 or earlier ).
*3 Assigned by Kernel device tree source
arch/arm/boot/dts/r8a77470-iwg23s.dts:memory@xxxx
*4 Assigned by u-boot command
bootargs vmmaloc=384M
*5 Please refer to appendix
iW-RainboW-G23S
Not Support
iW-RainboW-G23S
Not Support
0xc0008000
kernel image
0x40008000
kernel image
Page 34

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 31 of 37
Dec 31, 2020
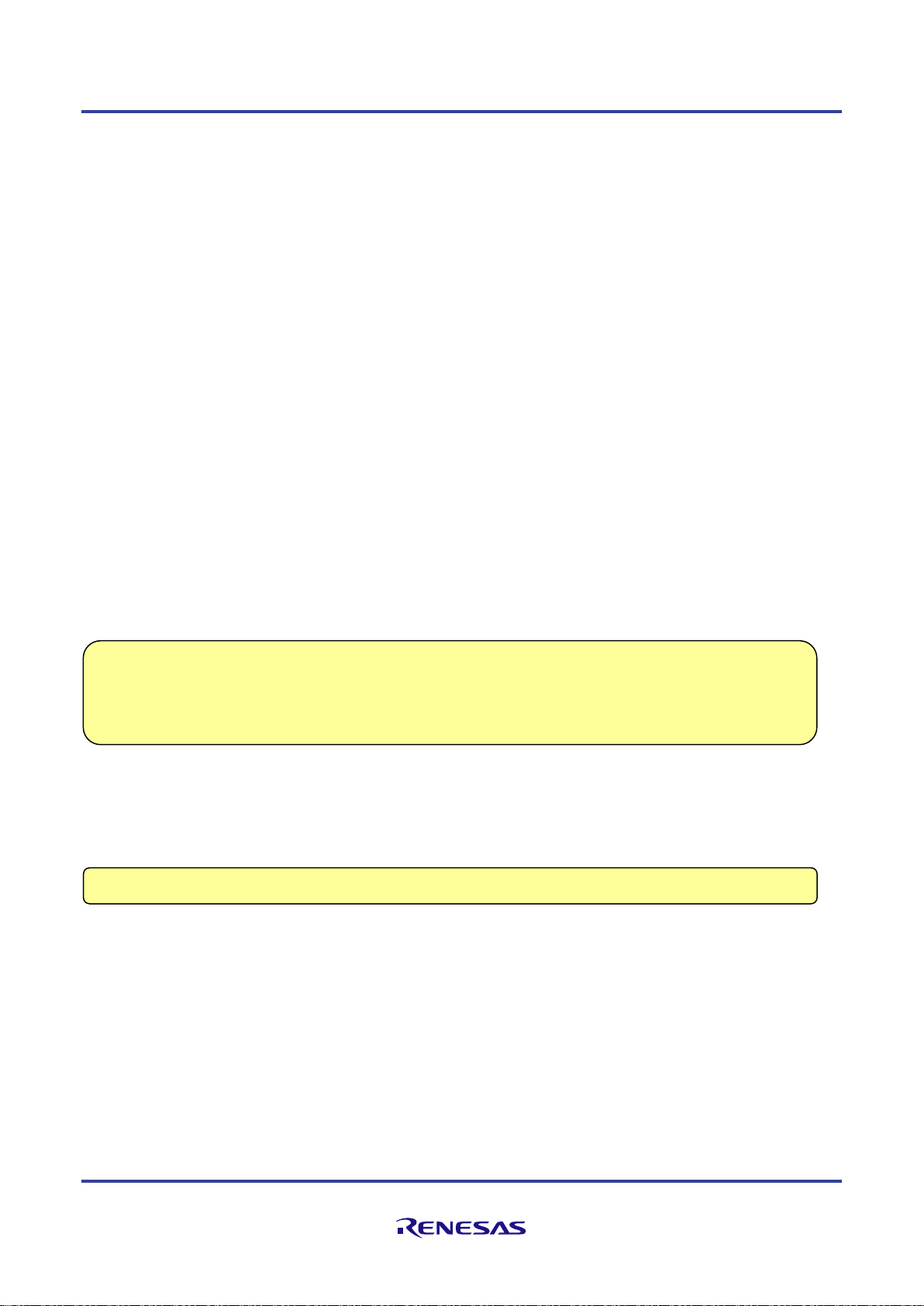
7. How to write binary file by TFTP
How to write some binary data is described in this section. The binary data is downloaded from TFTP server. It assumes
that U-Boot setting is done by section 4.
Note) Please use Mini-Monitor for writing U-Boot. Please refer to section 4 step4.
Procedure 1
Refer to the following figure and set the network system.
IP address in this figure is an example. Please use suitable IP address.
The TFTP server must have been started in advance.
Figure 8 Download environment from TFTP server
The following files should be stored in the server in advance.
uImage (Kernel)
The directory to store is the setting directory (for example "/tftpboot") of TFTP server.
RZ/G1H, RZ/G1M,
RZ/G1N, RZ/G1E, RZ/G1C
Board
Hub
TFTP server
IP address:192.168.0.1
LAN cable
USB cable (type A to
mini/micro B)
RZ/G1H/G1M/G1N Qseven Development Platform,
RZ/G1E SODIMM Development Platform
RZ/G1C SBC
The following files should be stored in the server in advance.
uImage
uImage-r8a7742-iwg21d-q7-dbcm-ca.dtb
uImage- r8a7743-iwg20d-q7-dbcm-ca.dtb
uImage-r8a7744-iwg20m.dtb
uImage-r8a7745-iwg22d-sodimm.dtb
uImage-r8a77470-iwg23s-sbc.dtb
PC to display Console
Page 35

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 32 of 37
Dec 31, 2020
Procedure 2
"Hit any key to stop autoboot" is displayed, after starting RZ/G1H, RZ/G1M, RZ/G1N Qseven Development Platform,
RZ/G1E SODIMM Development Platform, RZ/G1C SBC. And the countdown of three seconds starts. Please hit enter
key once while this. Then console appears.
U-Boot 2013.01.01-xxxxxxxx (xxx xx xxxx - xx:xx:xx)
CPU: Renesas Electronics R8A7743 rev 3.0
CPU: Temperature 70 C
Board: RZ/G1M iW-RainboW-G20M-Q7
DRAM: 1 GiB
MMC: sh-sdhi: 0, sh-sdhi: 1, sh_mmcif: 2
SF: Detected SST25VF016B with page size 4 KiB, total 2 MiB
In: serial
Out: serial
Err: serial
Board Info:
SOM Version : iW-PREWZ-AP-01-R3.3
Net: ether_avb
Hit any key to stop autoboot: 0
=>
Page 36

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 33 of 37
Dec 31, 2020
Procedure 3
Download a binary file from TFTP server to SDRAM. After that, write the binary file to SPI Flash.
The following example shows that the binary file uImage is downloaded to empty area address 0x41000000 on SDRAM
and written by size 0x300000 (that is bigger than downloaded size of uImage) from address 0x140000 of SPI Flash.
Settable size of "sf erase" command is multiple of the sector unit (256Kbyte) of SPI Flash.
Please confirm with the memory map about the address of the empty area of RAM and the write-in address of SPI Flash.
Note) After writing is completed, if an Enter key is inputted the writing will start again.
=> tftpboot 0x41000000 uImage
sh_eth:1 is connected to sh_eth. Reconnecting to sh_eth
sh_eth Waiting for PHY auto negotiation to complete. done
sh_eth: 100Base/Full
Using sh_eth device
TFTP from server 192.168.0.1; our IP address is 192.168.0.20
Filename 'uImage'.
Load address: 0x41000000
Loading: #############################################
#############################################
#############################################
#############################################
....
....
#############################################
2.8 MiB/s
done
Bytes transferred = 3094000 (2f35f0 hex)
=> setenv kern_size 0xXXXXXX (set filesize of uImage, round up by
256KB boundary, for example “0x400000”
=> sf probe
SF: Detected S25FL512S with page size 256 KiB, total 64 MiB
=> sf erase 0x140000 ${kern_size}
=> sf write 0x41000000 0x140000 ${kern_size}
=>
Page 37

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 34 of 37
Dec 31, 2020
8. U-Boot command
Please refer to U-Boot user's manual about available U-boot command for RZ/G1H, RZ/G1M, RZ/G1N, RZ/G1E,
RZ/G1C Linux BSP. The help or "?" command shows U-Boot command list, but be careful that it includes some
unsupported command.
Page 38

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 35 of 37
Dec 31, 2020
9. Appendix
9.1 IPMMU Example
The following example illustrates how to handle static mapped PTE for IPMMU.
enum {
IPMMUSY0_DOMAIN = 0,
IPMMUSY1_DOMAIN,
IPMMUDS_DOMAIN,
IPMMUMP_DOMAIN,
IPMMUMX_DOMAIN,
IPMMURT_DOMAIN,
IPMMUGP_DOMAIN,
IPMMU_DOMAIN_MAX
};
#define IPMMUSY0_ADDR (0xe6280000 + 0x800)
#define IPMMUSY1_ADDR (0xe6290000 + 0x800)
#define IPMMUDS_ADDR (0xe6740000 + 0x800)
#define IPMMUMP_ADDR (0xec680000 + 0x800)
#define IPMMUMX_ADDR (0xfe951000 + 0x800)
#define IPMMURT_ADDR (0xffc80000 + 0x800)
#define IPMMUGP_ADDR (0xe62a0000 + 0x800)
#define IMCTR 0x0000
#define IMCAAR 0x0004
#define IMTTBCR 0x0008
#define IMBUSCR 0x000c
#define IMTTLBR0 0x0010
#define IMTTUBR0 0x0014
#define IMTTLBR1 0x0018
#define IMTTUBR1 0x001c
#define IMSTR 0x0020
#define IMMAIR0 0x0028
#define IMMAIR1 0x002c
#define IMUCTR 0x0300
#define IMUASID 0x0308
#define IPMMU_PGDVAL(phys_addr) ((phys_addr & PGDIR_MASK) | 0x721)
#ifdef MMNGR_KOELSCH
#define IPMMU_ADDR_SECTION_0 0x0100000000ULL
#define IPMMU_ADDR_SECTION_1 0x0200000000ULL
#define IPMMU_ADDR_SECTION_2 0x0ULL
#define IPMMU_ADDR_SECTION_3 0x0ULL
#define IPMMU_PGDVAL_SECTION_0 IPMMU_PGDVAL(IPMMU_ADDR_SECTION_0)
#define IPMMU_PGDVAL_SECTION_1 IPMMU_PGDVAL(IPMMU_ADDR_SECTION_1)
#define IPMMU_PGDVAL_SECTION_2 0x0ULL
#define IPMMU_PGDVAL_SECTION_3 0x0ULL
#else
#define IPMMU_ADDR_SECTION_0 0x0100000000ULL
#define IPMMU_ADDR_SECTION_1 0x0140000000ULL
#define IPMMU_ADDR_SECTION_2 0x0180000000ULL
#define IPMMU_ADDR_SECTION_3 0x01c0000000ULL
#define IPMMU_PGDVAL_SECTION_0 IPMMU_PGDVAL(IPMMU_ADDR_SECTION_0)
#define IPMMU_PGDVAL_SECTION_1 IPMMU_PGDVAL(IPMMU_ADDR_SECTION_1)
#define IPMMU_PGDVAL_SECTION_2 IPMMU_PGDVAL(IPMMU_ADDR_SECTION_2)
#define IPMMU_PGDVAL_SECTION_3 IPMMU_PGDVAL(IPMMU_ADDR_SECTION_3)
#endif
#define IPMMU_KERNEL_PHY_ADDR 0x0040000000ULL
#define IPMMU_KERNEL_PHY_MIRROR_ADDR 0x0100000000ULL
#define IPMMU_KERNEL_LEGACY_MEM_SIZE 0x0040000000ULL
Page 39

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 36 of 37
Dec 31, 2020
static unsigned long r8a779x_ipmmu_reg_base[IPMMU_DOMAIN_MAX] = {
IPMMUSY0_ADDR,
IPMMUSY1_ADDR,
IPMMUDS_ADDR,
IPMMUMP_ADDR,
IPMMUMX_ADDR,
IPMMURT_ADDR,
IPMMUGP_ADDR,
};
static phys_addr_t r8a779x_ipmmu_trans_table[IPMMU_DOMAIN_MAX][4] = {
/* IPMMUSY0 */
{ IPMMU_ADDR_SECTION_0, IPMMU_ADDR_SECTION_1, IPMMU_ADDR_SECTION_2, IPMMU_ADDR_SECTION_3 },
/* IPMMUSY1 */
{ IPMMU_ADDR_SECTION_0, IPMMU_ADDR_SECTION_1, IPMMU_ADDR_SECTION_2, IPMMU_ADDR_SECTION_3 },
/* IPMMUDS */
{ IPMMU_ADDR_SECTION_0, IPMMU_ADDR_SECTION_1, IPMMU_ADDR_SECTION_2, IPMMU_ADDR_SECTION_3 },
/* IPMMUMP */
{ IPMMU_ADDR_SECTION_0, IPMMU_ADDR_SECTION_1, IPMMU_ADDR_SECTION_2, IPMMU_ADDR_SECTION_3 },
/* IPMMUMX */
{ IPMMU_ADDR_SECTION_0, IPMMU_ADDR_SECTION_1, IPMMU_ADDR_SECTION_2, IPMMU_ADDR_SECTION_3 },
/* IPMMURT */
{ IPMMU_ADDR_SECTION_0, IPMMU_ADDR_SECTION_1, IPMMU_ADDR_SECTION_2, IPMMU_ADDR_SECTION_3 },
/* IPMMUGP */
{ IPMMU_ADDR_SECTION_0, IPMMU_ADDR_SECTION_1, IPMMU_ADDR_SECTION_2, IPMMU_ADDR_SECTION_3 },
};
static pgdval_t* r8a779x_ipmmu_pgd[IPMMU_DOMAIN_MAX];
static void r8a779x_ipmmu_startup( void )
{
int i;
pgdval_t *pgdval_addr = NULL;
for ( i = 0; i < IPMMU_DOMAIN_MAX; i++ ){
pgdval_addr = kmalloc(PAGE_SIZE, GFP_KERNEL);
if ( pgdval_addr != NULL ){
pgdval_addr[0] = IPMMU_PGDVAL_SECTION_0;
pgdval_addr[1] = IPMMU_PGDVAL_SECTION_1;
pgdval_addr[2] = IPMMU_PGDVAL_SECTION_2;
pgdval_addr[3] = IPMMU_PGDVAL_SECTION_3;
r8a779x_ipmmu_pgd[i] = pgdval_addr;
}
}
}
static void r8a779x_ipmmu_cleanup( void )
{
int i;
for ( i = 0; i < IPMMU_DOMAIN_MAX; i++ ){
if ( r8a779x_ipmmu_pgd[i] != NULL ){
kfree(r8a779x_ipmmu_pgd[i]);
}
}
}
static int r8a779x_ipmmu_initialize( int domain )
{
void __iomem *base;
int i, utlb_num;
if ( domain < 0 || domain >= IPMMU_DOMAIN_MAX ){
return -1;
}
if ( r8a779x_ipmmu_pgd[domain] == NULL ){
return -1;
}
pr_debug( "ipmmu initialize. domain:%d\n", domain );
base = ioremap( r8a779x_ipmmu_reg_base[domain], PAGE_SIZE );
iowrite32( 0x80000000, base + IMTTBCR );
iowrite32( 0x00000000, base + IMTTUBR0 );
iowrite32( __pa(r8a779x_ipmmu_pgd[domain]), base + IMTTLBR0 );
iowrite32( 0x00000003, base + IMCTR );
utlb_num = ( domain != IPMMUGP_DOMAIN ) ? 32: 1;
for ( i = 0; i < utlb_num; i++ ){
iowrite32( 0x00000003, base + IMUCTR + (0x10*i) );
Page 40

Linux Interface Specification Yocto recipe Start-Up Guide
R01US0227EJ0212 Rev2.12 Page 37 of 37
Dec 31, 2020
}
pr_debug("ipmmu : IMTTBCR: %x, IMTTUBR0: %x, IMTTLBR0: %x, IMCTR: %x \n",
ioread32(base + IMTTBCR), ioread32(base + IMTTUBR0),
ioread32(base + IMTTLBR0), ioread32(base + IMCTR));
iounmap( base );
return 0;
}
static unsigned long r8a779x_ipmmu_phys_to_virt( int domain, phys_addr_t paddr )
{
unsigned long vaddr = 0;
int section = 0;
if ( domain < 0 || domain >= IPMMU_DOMAIN_MAX ){
return 0;
}
if ( paddr >= IPMMU_KERNEL_PHY_ADDR &&
paddr < IPMMU_KERNEL_PHY_ADDR + IPMMU_KERNEL_LEGACY_MEM_SIZE ) {
/* If a physical address indicates the legacy space,
* adjust the offset for the IPMMU table conversion.
*/
paddr = paddr - IPMMU_KERNEL_PHY_ADDR + IPMMU_KERNEL_PHY_MIRROR_ADDR;
}
for ( section = 0; section < 4; section++ ){
if ( (paddr >= r8a779x_ipmmu_trans_table[domain][section]) &&
(paddr < r8a779x_ipmmu_trans_table[domain][section]+SZ_1G ) ){
vaddr = section * SZ_1G;
vaddr |= paddr & 0x3fffffff;
}
}
return vaddr;
}
static phys_addr_t r8a779x_ipmmu_virt_to_phys( int domain, unsigned long vaddr )
{
phys_addr_t paddr = 0;
int section = 0;
if ( domain < 0 || domain >= IPMMU_DOMAIN_MAX ){
return 0;
}
section = (vaddr & 0xc0000000) >> 30;
paddr = vaddr & 0x3fffffff;
paddr |= r8a779x_ipmmu_trans_table[domain][section];
if ( paddr >= IPMMU_KERNEL_PHY_MIRROR_ADDR &&
paddr < IPMMU_KERNEL_PHY_MIRROR_ADDR + IPMMU_KERNEL_LEGACY_MEM_SIZE ) {
/* If a physical address indicates the legacy space,
* adjust the offset for the IPMMU table conversion.
*/
paddr = paddr - IPMMU_KERNEL_PHY_MIRROR_ADDR + IPMMU_KERNEL_PHY_ADDR;
}
return paddr;
}
Page 41

C - 1
REVISION HISTORY
Linux Interface Specification Yocto recipe Start-Up Guide
User’s Manual: Software
Rev.
Date
Description
Page
Summary
0.10
Mar. 08, 2015
First Edition issued (Preliminary)
1.00
Apr. 01, 2016
Update version
1.10
Jan. 11, 2017
―
Added RZ/G1H
2.00
Sep. 15, 2017
―
Update kernel version to linux-4.4.y-cip for RZ/G1M
2.01
Nov. 02, 2017
7, 13, 14,
15, 22, 24,
25
Remove command or description related to x11: we have no support for x11
8, 9
Fix build command
2.02
Nov. 22, 2017
9,14,25
Fix build command
11
Remove command or description related to x11
2.03
Dec. 15, 2017
―
Update kernel version to linux-4.4.y-cip for RZ/G1E
2.04
Feb. 15, 2018
―
Update kernel version to linux-4.4.y-cip for RZ/G1C
2.05
Mar. 30, 2018
―
Update kernel version to linux-4.4.y-cip for RZ/G1N
2.06
May. 31, 2018
―
Update kernel version to linux-4.4.y-cip for RZ/G1H
2.07
Jul. 31, 2018
―
Add support VLP2.1.x
2.08
Sep. 30, 2018
―
Add support VLP2.1.x-RT
Remove VLP2.0.x related information
Separate iWave-G1M and iWave-G1N
Update ‘certified-linux-v2.1.0-update1’
2.09
Mar. 27, 2019
2, 9, 10
Change descriptions of ‘certified-linux’ version
2.10
Dec. 23, 2019
15, 16, 18,
20, 21
Update build instruction for Gecko, Qt, and no UI framework
Update device-tree names of RZ/G1C and RZ/G1E
2.11
Mar. 13, 2020
10
Update build instruction for demo packages
2.12
Dec. 31, 2020
―
Update device-tree names of RZ/G1H
Page 42

Linux Interface Specification Yocto recipe Start-Up Guide
User’s Manual: Software
Publication Date: Rev2.12 Dec 31, 2020
Published by: Renesas Electronics Corporation
Page 43

Linux Interface Specification
Yocto recipe Start-Up Guide
 Loading...
Loading...