

Page 1
Gebruiksaanwijzing
Elektrische quadrocopter
“Foldable Drone G-Sense” RtF
Bestelnr. 1697439
Page 2

Inhoudsopgave
Pagina
1. Inleiding ...............................................................................................................................................................4
2. Verklaring van de symbolen .................................................................................................................................4
3. Doelmatig gebruik ................................................................................................................................................ 5
4. Leveringsomvang ................................................................................................................................................5
5. Productbeschrijving .............................................................................................................................................6
6. Veiligheidsaanwijzingen .......................................................................................................................................7
a) Algemeen ......................................................................................................................................................7
b) Vóór de ingebruikname .................................................................................................................................8
c) Tijdens het gebruik ........................................................................................................................................ 8
7. Aanwijzingen voor batterijen en accu’s ................................................................................................................9
8. Bedieningsorganen van de zender .................................................................................................................... 10
9. Ingebruikname van de zender ........................................................................................................................... 11
a) Batterijen plaatsen ....................................................................................................................................... 11
b) Zender inschakelen ..................................................................................................................................... 12
10. Ingebruikname van de quadcopter ....................................................................................................................13
a) Vluchtaccu opladen ..................................................................................................................................... 13
b) In- en uitklappen van de propellerarmen ..................................................................................................... 14
c) Controle van de aandrijving ......................................................................................................................... 14
d) Plaatsen van de vluchtaccu ......................................................................................................................... 15
e) De quadcopter inschakelen ........................................................................................................................ 16
f) Fundamentele informatie voor het besturen van quadcopters .................................................................... 17
g) Praktische vliegtips voor de eerste start ...................................................................................................... 20
11. Kalibratie van de positiesensors ........................................................................................................................21
12. Starten van de quadcopter ................................................................................................................................22
13. Landen van de quadcopter ................................................................................................................................23
14. Omschakelen beginner/sport/expert ..................................................................................................................24
15. Flipfunctie ..........................................................................................................................................................25
16. Vliegen in koploze modus ..................................................................................................................................26
17. Achteruitfunctie .................................................................................................................................................. 27
18. Smartphone-app installeren ...............................................................................................................................28
a) Open de app ................................................................................................................................................ 28
b) Instellen ....................................................................................................................................................... 29
c) Hulpfunctie ................................................................................................................................................... 29
d) Bediening ..................................................................................................................................................... 30
2
Page 3

Pagina
19. Foto's en video's (op)nemen ..............................................................................................................................31
20. De smartphone als afstandsbediening ..............................................................................................................32
a) Smartphonebesturing activeren ................................................................................................................... 32
b) Besturingsfuncties van de app ....................................................................................................................33
c) Quadcopter via smartphone starten ............................................................................................................ 34
d) Quadcopter via smartphone landen ............................................................................................................34
e) Overige besturingsopties ............................................................................................................................. 35
21. Spel toegevoegde realiteit .................................................................................................................................36
22. Onderhoud en verzorging ..................................................................................................................................37
23. Afvoer ................................................................................................................................................................38
a) Product ........................................................................................................................................................ 38
b) Batterijen/accu’s ..........................................................................................................................................38
24. Conformiteitsverklaring (DOC) ...........................................................................................................................38
25. Verhelpen van storingen .................................................................................................................................... 39
26. Technische gegevens ........................................................................................................................................40
a) Zender ......................................................................................................................................................... 40
b) Quadcopter .................................................................................................................................................. 40
c) Camera ........................................................................................................................................................ 40
d) USB-oplader ................................................................................................................................................ 40
e) Software/app ...............................................................................................................................................40
3
Page 4

1. Inleiding
Geachte klant,
Hartelijk dank voor de aankoop van dit product.
Dit product voldoet aan alle wettelijke, nationale en Europese normen.
Om dit zo te houden en een veilig gebruik te garanderen, dient u als gebruiker de aanwijzingen in deze gebruiksaanwijzing op te volgen.
Deze gebruiksaanwijzing behoort bij dit product. Er staan belangrijke aanwijzingen in over de ingebruik-
name en het gebruik. Houd hier rekening mee als u dit product doorgeeft aan derden.
Bewaar deze gebruiksaanwijzing daarom om deze later te kunnen raadplegen!
Alle vermelde bedrijfs- en productnamen zijn handelsmerken van de betreffende eigenaren. Alle rechten voorbehouden.
Bij technische vragen kunt u zich wenden tot onze helpdesk.
Voor meer informative kunt u kijken op www.conrad.nl of www.conrad.be
2. Verklaring van de symbolen
Het symbool met een uitroepteken in een driehoek duidt op belangrijke aanwijzingen in deze
gebruiksaanwijzing die beslist opgevolgd moeten worden.
U ziet het pijlsymbool waar bijzondere tips en aanwijzingen over de bediening worden gegeven.
4
Page 5
3. Doelmatig gebruik
De elektro-quadcopter "Foldable Drone G-Sense RtF" is een elektrisch aangedreven helikopterachtig model, dat
met behulp van de bijbehorende radiograsche afstandsbediening of een geschikte smartphone (niet inbegrepen in
de leveringsomvang) draadloos wordt bestuurd. De quadcopter is uitsluitend bedoeld voor particulier gebruik in de
modelbouw en de daarbij behorende bedrijfstijden.
Het model is bestemd voor gebruik binnenshuis, maar kan bij windstilte ook buiten worden gebruikt.
Dit systeem is niet geschikt voor andere toepassingen. Een ander gebruik dan hier beschreven kan beschadiging
van het product en de hiermee verbonden gevaren zoals bijv. kortsluiting, brand, elektrische schokken enz. tot gevolg
hebben.
Het product mag niet vochtig of nat worden.
Het product is niet geschikt voor kinderen onder de 14 jaar.
Neem alle veiligheidsaanwijzingen in deze gebruiksaanwijzing in acht. Deze bevatten belangrijke informa-
tie over de omgang met het product.
Alleen u bent verantwoordelijk voor een veilige werking van het model!
4. Leveringsomvang
• Vliegklaar opgebouwde quadcopter
• Vluchtaccu
• Draadloze afstandsbediening
• USB-oplaadkabel
• Schroevendraaier
• Vervangingspropeller (4 stuks)
• Gebruiksaanwijzing (op cd)
Actuele gebruiksaanwijzingen
Download de meest recente gebruiksaanwijzing via de koppeling www.conrad.com/downloads of
scan de afgebeelde QR-Code. Volg de aanwijzingen op de website.
5
Page 6

5. Productbeschrijving
De vliegklaar opgebouwde quadcopter "Foldable Drone G-Sense RtF" beschikt over 4 afzonderlijk aangestuurde motoren, die telkens een eigen propeller aandrijven. Door het gelijktijdig aandrijven van alle propellers kan de quadcopter
van de grond opstijgen en bij geschikte propellersnelheden stabiel in de lucht zweven.
De quadcopter beschikt voor de stabilisering tijdens de vlucht over hoogwaardige elektronica met positie- en acceleratiesensoren, die in staat is om niet aangestuurde bewegingen van het model te herkennen en onmiddellijk te
compenseren. De quadcopter is voorzien van een barometrische luchtdruksensor waarmee deze de vlieghoogte zelf
kan stabiliseren.
Voor de vlucht in een bepaalde richting, detecteert de elektronica in het model de besturingsimpulsen van de zender
en past meteen de snelheden van de afzonderlijke motoren aan. De quadcopter beweegt zich daarbij in de gewenste
richting en de opwaartse druk werkt daardoor ook als aandrijving. De quadcopter vliegt in de desbetreffende richting.
De besturing op de zender vindt plaats via een stuurknuppel alsmede door het zwenken en kantelen van de handzender. Er is een G-sensor in de zender ingebouwd voor het herkennen van de bewegingen.
Op het model draaien twee propellers met de klok mee en twee propellers tegen de klok in. Door een gerichte
snelheidswijziging van de beide propellergroepen tegenover elkaar (rechtsdraaiende propellers draaien iets sneller
en linksdraaiende propellers draaien iets langzamer, of omgekeerd), is het mogelijk dat de quadcopter op constante
vlieghoogte en op dezelfde plaats rond de verticale as kan draaien (gieren). De quadcopter kan indien nodig zelfs
zijdelingse salto's (ips) vliegen.
De vier propellerarmen zijn inklapbaar voor eenvoudiger transport, waardoor het model zeer ruimtebesparend kan
worden getransporteerd.
Er is een HD-camera in de quadcopter geïntegreerd, die tijdens de vlucht foto's en video's per Wi-Fi naar een geschikte smartphone (niet in de leveringsomvang inbegrepen) overdraagt. De smartphone kan indien gewenst ook
voor de besturing van de quadcopter worden gebruikt.
Voor de stroomvoorziening van de zender zijn nog 2 batterijen van type AAA/micro nodig.
6
Page 7
6. Veiligheidsaanwijzingen
In geval van schade, die ontstaat door het niet naleven van de gebruiksaanwijzing, komt de waarborg/garantie te vervallen. We zijn niet aansprakelijk voor gevolgschade!
Wij zijn niet aansprakelijk voor materiële schade of persoonlijk letsel veroorzaakt door verkeerd
gebruik of het niet opvolgen van de veiligheidsaanwijzingen! In dergelijke gevallen komt de waarborg/garantie te vervallen.
Verder zijn normale slijtage bij gebruik (bijv. versleten motoraslagers) en schade door ongevallen
(bijv. gebroken chassisdelen of propellers) uitgesloten van de garantie en vrijwaring.
Geachte klant,
Deze veiligheidsaanwijzingen zijn niet alleen voor de bescherming van het product, maar ook voor uw
eigen veiligheid en die van andere personen. Lees dit hoofdstuk daarom aandachtig door, voordat u het
product in gebruik neemt!
a) Algemeen
Let op, belangrijke aanwijzing!
Het gebruik van het model kan materiële schade en/of persoonlijk letsel veroorzaken. Zorg er dus
voor dat u voor het gebruik van het model voldoende verzekerd bent, bijvoorbeeld via een aansprakelijkheidsverzekering. Als u al een aansprakelijkheidsverzekering hebt, controleer dan voordat u
het model in gebruik neemt of dit door uw verzekeringsmaatschappij wordt gedekt.
Let op: Er bestaat in verschillende landen een verplichte verzekering voor alle modelvliegtuigen!
Informeer uzelf over de lokale wettelijke voorschriften voor het gebruik van modelvliegtuigen. In
Duitsland zijn de voorschriften voor een gebruiker van vliegtuigmodellen van welke aard ook bijvoorbeeld vastgelegd in de luchtvaartverordening. Overtredingen van de daar vermelde wettelijke
voorschriften kunnen leiden tot zware straffen en beperkingen op de dekking van de verzekering.
• Om veiligheids- en de toelatingsredenen is het niet toegestaan dit product zelf om te bouwen en/of te
wijzigen.
• Het apparaat is geen speelgoed en is niet geschikt voor kinderen jonger dan 14 jaar.
• Het product mag niet vochtig of nat worden.
• Als u nog niet voldoende kennis hebt voor het gebruik van afstandsbediende modelbouwproducten,
raadpleeg dan een ervaren modelhobbyist of een modelbouwclub.
• Laat het verpakkingsmateriaal niet rondslingeren, dit kan voor kinderen gevaarlijk speelgoed zijn.
• Als u vragen hebt die niet door deze gebruiksaanwijzing kunnen worden beantwoord, neem dan contact
op met ons (zie hoofdstuk 1 voor contactinformatie) of met een andere specialist.
• De bediening en het gebruik van afstandsbediende quadcopters moet worden geleerd! Als u nog nooit
een dergelijk model hebt bestuurd, moet u heel voorzichtig beginnen en u eerst vertrouwd maken met de
reacties van het model op de opdrachten van de afstandsbediening. Wees alstublieft geduldig!
7
Page 8
b) Vóór de ingebruikname
• Kies een geschikte locatie voor het gebruik van het model.
• Houd u zich bij het inschakelen van de quadcopter aan de hierna in een afzonderlijk hoofdstuk beschre-
ven handelwijze. Alleen op deze manier kan een afstemming tussen zender en ontvanger plaatsvinden,
zodat het model betrouwbaar op de commando's van de zender reageert.
• Zorg ervoor dat er geen andere modellen worden gebruikt binnen het bereik van de afstandsbediening
op dezelfde 2,4 GHz-band (zendfrequentie). Controleer altijd of gelijktijdig gebruikte 2,4 GHz zendinstallaties uw model niet storen.
• Controleer de technische veiligheid van het model en de afstandsbediening. Let op zichtbare schade zoals bijv. defecte connectors of beschadigde kabels. Alle beweegbare onderdelen van het model moeten
soepel werken, maar mogen geen speling in de lagers vertonen.
• Controleer vóór iedere ingebruikname de juiste en vaste bevestiging van de propellers.
• De voor de werking noodzakelijke vluchtaccu moet voor het gebruik worden opgeladen.
• Let bij de batterijen in de zender op voldoende restcapaciteit (zie zender-led). Als de batterijen leeg zijn,
moeten steeds alle batterijen worden vervangen en nooit afzonderlijke batterijen.
c) Tijdens het gebruik
• Neem geen risico's bij het gebruik van het product! Uw eigen veiligheid en die van uw omgeving is
uitsluitend afhankelijk van uw verantwoord gebruik van het model.
• Een verkeerd gebruik kan ernstig persoonlijk letsel en zware materiële schade tot gevolg hebben! Houd
daarom bij het vliegen voldoende afstand tot personen, dieren en voorwerpen.
• U mag het model alleen besturen als uw reactievermogen onbeperkt is. Vermoeidheid of beïnvloeding
door alcohol of medicijnen kunnen verkeerde reacties tot gevolg hebben.
• Let er bij draaiende propellers op dat er zich geen voorwerpen en lichaamsdelen in de draai- en aanzuigzone van de propellers bevinden.
• Vlieg nooit direct op toeschouwers of op uzelf af.
• Probeer nooit de vliegende quadcopter met de hand te vangen.
• Zowel de motoren, de motorregelaar en de vluchtaccu kunnen bij het bedrijf heet worden. Neem daarom
een pauze van 5 - 10 minuten, voordat u de vluchtaccu weer oplaadt of het model weer start met een
opgeladen reserve-accu.
• Laat de afstandsbediening (zender) altijd ingeschakeld zolang het model in gebruik is. Schakel de quadcopter na de landing altijd eerst uit, voordat u de afstandsbediening uitschakelt. Schakel de zender
tijdens het bedrijf nooit uit, zolang de quadcopter nog in werking is.
• Het model en de afstandsbediening mogen niet gedurende langere tijd aan direct zonlicht of grote hitte
worden blootgesteld.
• In het geval van een ernstige crash (bijvoorbeeld van een grote hoogte), kunnen de elektronische gyrosensors worden beschadigd. Voordat een nieuwe vlucht plaatsvindt, moet daarom beslist de volledige
functie worden gecontroleerd!
• Bij een crash moet u meteen de propellermotoren uitschakelen. Draaiende propellers kunnen bij contact
met hindernissen resp. bij contact met obstakels worden beschadigd. Voor een nieuwe vlucht moeten
deze beslist op mogelijke scheuren of breuken worden gecontroleerd!
• Om schade aan het model door een val als gevolg van onderspanning of een diepe ontlading van de
batterij te voorkomen, raden wij u aan tijdens de vlucht op de lichtsignalen voor onderspanning te letten.
8
Page 9
7. Aanwijzingen voor batterijen en accu’s
Het gebruik van batterijen en accu’s is vandaag de dag weliswaar vanzelfsprekend, maar er bestaan
toch tal van gevaren en problemen.
Houd daarom in ieder geval rekening met de volgende algemene informatie en veiligheidsvoorschriften voor het gebruik van batterijen en accu´s.
• Houd batterijen en accu’s uit de buurt van kinderen.
• Laat batterijen en accu’s niet rondslingeren. Er bestaat dan gevaar dat ze door kinderen of huisdieren
worden ingeslikt. Neem in dat geval onmiddellijk contact op met een arts!
• U mag batterijen/accu’s nooit kortsluiten, demonteren of in vuur werpen. Er bestaat dan explosiegevaar!
• Lekkende of beschadigde batterijen/accu’s kunnen bij contact met de huid chemische brandwonden
veroorzaken. Gebruik in dergelijke gevallen geschikte beschermende handschoenen.
• Gewone batterijen mogen niet worden opgeladen. Er bestaat brand- en explosiegevaar! Laad uitsluitend daarvoor bestemde accu's op (1,2 V); gebruik hiervoor geschikte opladers. Batterijen (1,5 V) zijn
bestemd voor eenmalig gebruik en moeten als ze leeg zijn volgens de voorschriften worden afgevoerd.
• Let bij het plaatsen van batterijen op de juiste polariteit (neem plus/+ en min/- in acht). Bij verkeerde
polariteit worden niet alleen de zender en de batterijen beschadigd. Er bestaat bovendien brand- en
explosiegevaar.
• Vervang steeds de volledige set batterijen. U mag geen volle en halfvolle batterijen door elkaar gebruiken. Gebruik steeds batterijen van hetzelfde type en dezelfde fabrikant.
• Gebruik nooit batterijen en accu’s door elkaar! Gebruik voor de zender van de afstandsbediening uitsluitend batterijen.
• Als u het model langere tijd niet gebruikt (bijv. als u het opbergt), moet u de batterijen uit de afstandsbediening nemen om beschadigingen door lekkende batterijen te voorkomen.
• Schakel na de vlucht de quadcopter uit en haal de vluchtaccu uit de quadcopter. Laat de vluchtaccu niet
in de quadcopter, als u het model niet gebruikt (bijv. bij opslag of transport). Anders kan de vluchtaccu
diep worden ontladen, waardoor deze onbruikbaar of zelfs vernield wordt!
• U mag de vluchtaccu nooit direct na het gebruik opladen. Laat de vluchtaccu steeds afkoelen, tot deze
weer dezelfde temperatuur als de ruimte of de omgeving heeft.
• Laad uitsluitend intacte en onbeschadigde vluchtaccu's op. Als de uitwendige isolatie van de accu is beschadigd of als deze een andere vorm heeft of bol staat, mag de accu in geen geval worden opgeladen.
In dit geval bestaat er een acuut gevaar voor brand en explosies!
• U mag de omhulling van de vluchtaccu nooit beschadigen, de folie niet doorknippen en niet met scherpe
voorwerpen in de accu prikken. Er bestaat brand- en explosiegevaar!
• Laat de vluchtaccu tijdens het opladen niet zonder toezicht.
• Ontkoppel de vluchtaccu van de oplaadkabel wanneer deze volledig is opgeladen.
9
Page 10
8. Bedieningsorganen van de zender
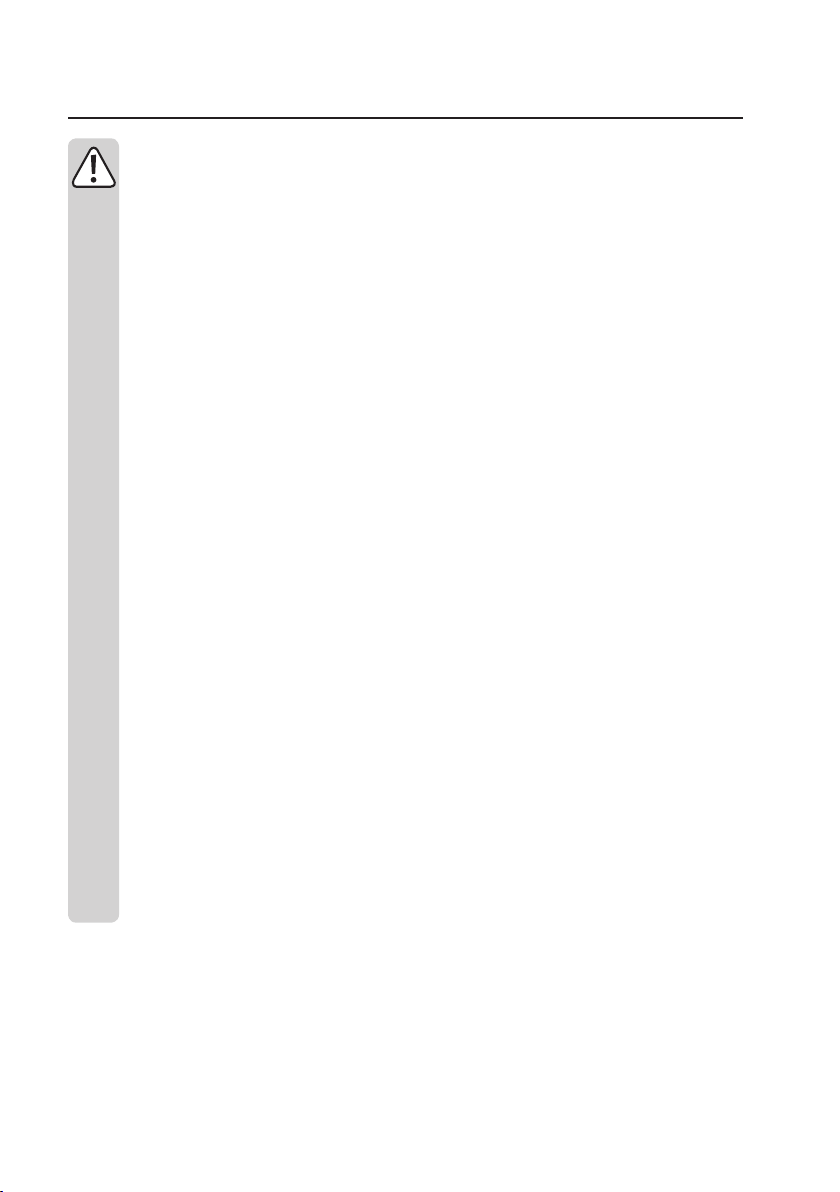
Afbeelding 1
1 Stuurknuppel voor de vlieghoogte- en gierfunctie
2 Druktoets voor de start- en landingsfunctie
3 Druktoets voor de terugkeerfunctie
4 Led-indicator
5 Druktoets voor de aan-/uitfunctie
6 Druktoets voor de koploze-/achteruitfunctie
7 Drukknop voor kalibratie van de sensors.
8 Drukknop voor het (op)nemen van foto's en video's *
9 Druktoets voor de modi beginner, sport en expert
* Opgelet:
Het (op)nemen van foto's en video's vindt uitsluitend plaats bij verbinding met een smartphone (niet in de
leveringsomvang inbegrepen). Daarvoor moet er een app op de smartphone worden geïnstalleerd. Daarna
kunnen de foto's en video's op de smartphone worden opgeslagen. De precieze handelwijze wordt na de
informatie voor de installatie van de app beschreven.
10
Page 11
9. Ingebruikname van de zender
In deze gebruiksaanwijzing hebben de cijfers in de tekst steeds betrekking op de nevenstaande afbeelding
of afbeeldingen in de paragraaf. Kruisverwijzingen naar andere afbeeldingen worden met de desbetreffende afbeeldingnummers aangegeven.
De afbeeldingen op de afstandsbediening en het model in deze handleiding dienen slechts als voorbeeld.
a) Batterijen plaatsen
U hebt voor de stroomvoorziening van de zender 2 batterijen van type AAA/micro nodig.
Gebruik alleen batterijen (1,5 V/cel) en geen accu's (1,2 V/cel) voor de stroomvoorziening van de zender.
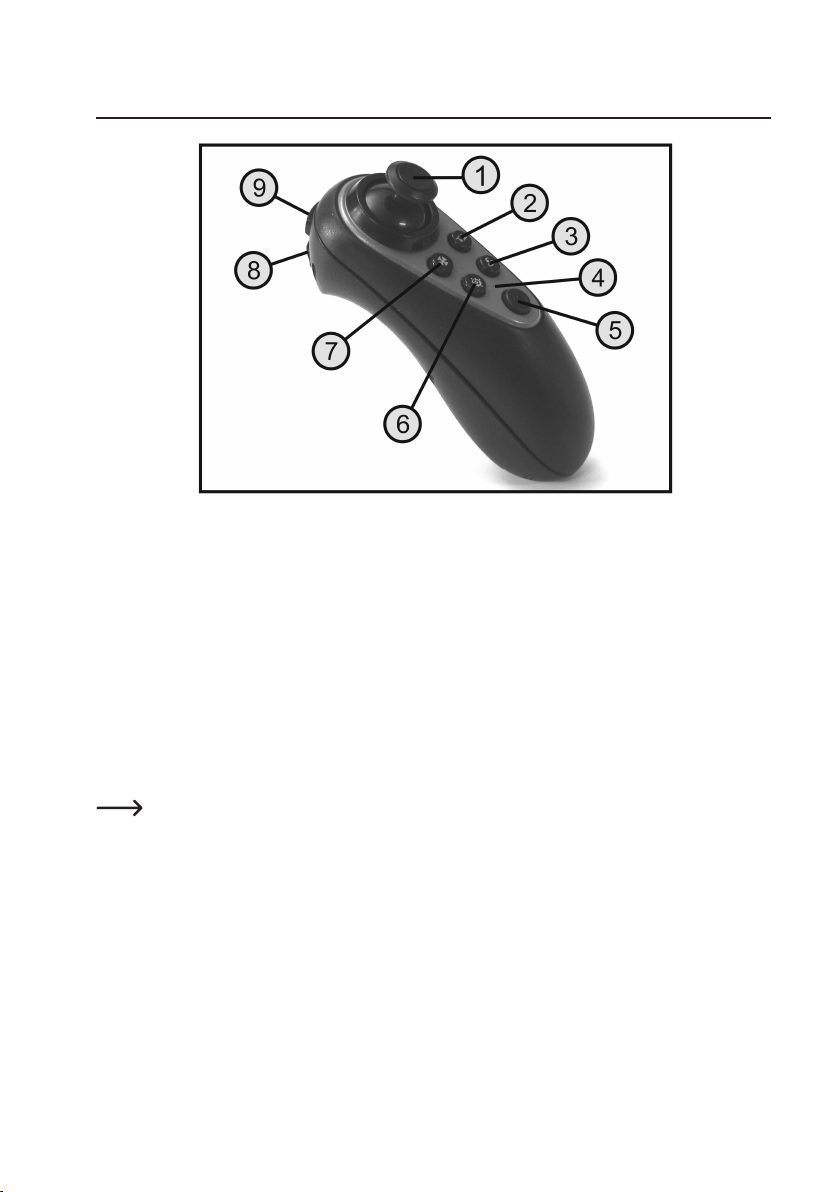
Ga als volgt te werk voor het plaatsen van de batterijen:
Druk aan de onderkant van de zender de lip van de dekselvergrendeling (1) naar voren en til het deksel van het
batterijvak (2) naar boven eraf.
Plaats 2 batterijen van het type AAA/micro (3) volgens de
afbeelding op het batterijvak (4) met de juiste polariteit.
Het spiraalvormige veercontact (5) moet altijd met de minpool van de batterij worden verbonden.
Plaats het deksel van het batterijvak (2) weer en klik de
vergrendeling in de behuizing van de zender.
Stickers, ontwerp en kleurstelling kunnen bij de standaard geleverde producten afwijken van de afbeeldingen in de handleiding.
Belangrijk!
Afbeelding 2
11
Page 12
b) Zender inschakelen
Houd de druktoets voor de aan-/uitfunctie ingedrukt (zie
ook afbeelding 1, pos. 5).
De zender laat een korte signaaltoon horen en de led-aanduiding (zie ook afbeelding 1, pos. 4) begint te knipperen.
Schuif daarna de stuurknuppel voor de vlieghoogte- en
gierfunctie (zie ook afbeelding 1, pos. 1) volledig naar
boven.
De zender laat daarbij een signaaltoon horen. Beweeg de
stuurknuppel nu volledig naar beneden. De zender laat
daarbij opnieuw een signaaltoon horen en de led-indicator
brandt nu constant.
Houd de drukknop voor de aan-/uitfunctie ingedrukt om de
quadcopter weer uit te schakelen. De zender laat daarbij
een signaaltoon horen en de led gaat uit.
Als de stroomvoorziening voor de werking van de zender volgens de voorschriften onvoldoende zou zijn, dan begint
de led-aanduiding (zie afbeelding 3, pos. 4) te knipperen.
Beëindig in dit geval het vliegen met de quadcopter onmiddellijk en plaats een nieuwe set batterijen in de zender.
Afbeelding 3
12
Page 13
10. Ingebruikname van de quadcopter
a) Vluchtaccu opladen
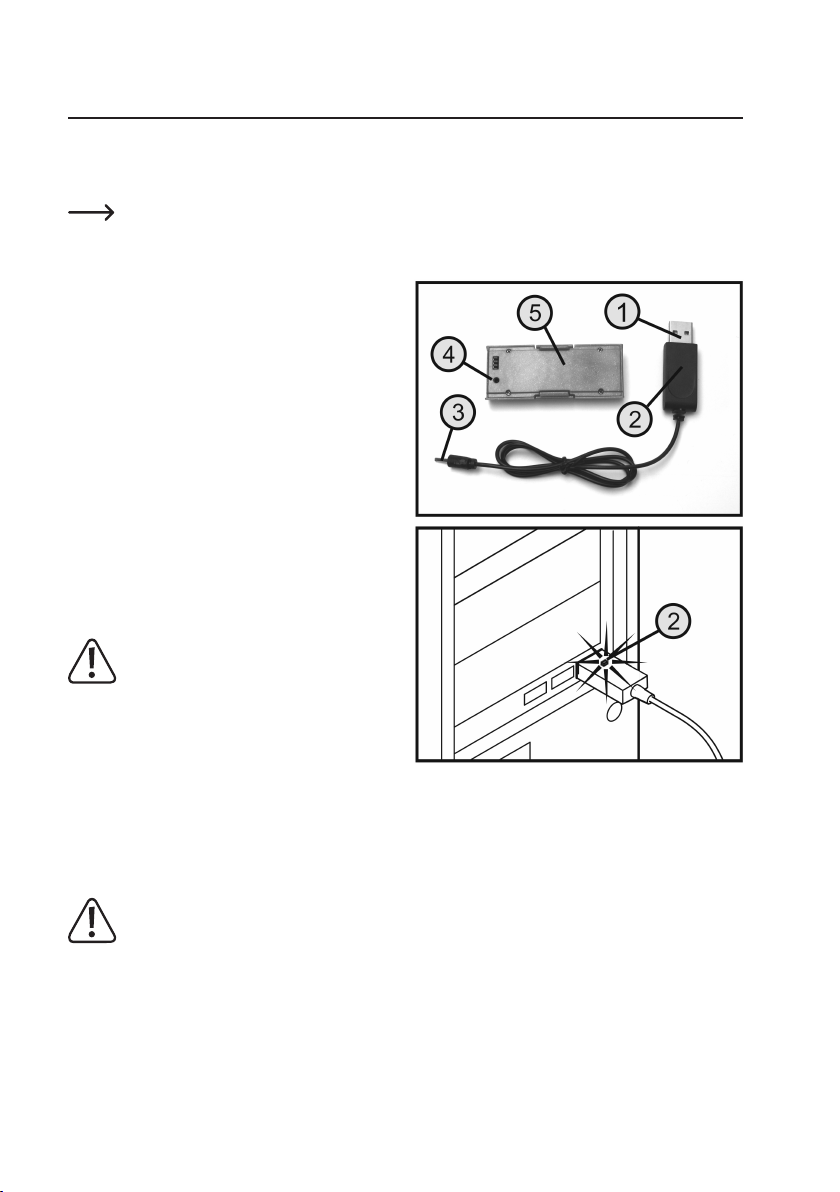
De vluchtaccu wordt met behulp van de meegeleverde USB-oplaadkabel opgeladen.
Om fototechnische redenen is de oplaadkabel op afbeelding 4 opgerold te zien. De kabelbinder moet vóór
het eerste gebruik worden geopend en de oplaadkabel moet over de gehele lengte worden afgerold.
Opladen:
Sluit de USB-stekker van de oplaadkabel (1) aan op een
USB-aansluiting van een computer/notebook of op een
USB-lichtnetadapter.
De laadindicator-led in de USB-stekker (2) brandt en geeft
zo de juiste voeding van de USB-oplaadkabel weer.
Sluit de 2 mm-stekker (3) van de oplaadkabel aan op de
oplaadaansluiting (4) van de vluchtaccu (5).
De oplaadprocedure begint nu automatisch en de oplaadindicator-led in de USB-stekker (2) gaat uit.
Wanneer de oplaadprocedure is voltooid en de vluchtaccu
volledig is opgeladen, licht de rode led in de USB-stekker
weer op.
Verbreek direct na het voltooien van de oplaadprocedure
de verbinding van de vluchtaccu met de oplaadkabel en
trek de USB-stekker van de oplaadkabel uit de computer/
laptop resp. lichtnetadapter.
Opgelet!
Sluit de USB-kabel niet aan op een USB-hub
zonder eigen lichtnetadapter (bijv. een USBpoort van een toetsenbord o.i.d.), omdat de
stroom voor de oplaadfunctie hiervoor niet voldoende is.
Afbeelding 4
Het besturingssysteem herkent na het aansluiten van de oplaadkabel geen nieuwe hardware, aangezien de USBpoort alleen voor het opladen wordt gebruikt. Houd er rekening mee dat de USB-poort van een computer/notebook
meestal alleen actief is, als de computer/notebook is ingeschakeld.
Wij adviseren u daarom de oplaadkabel alleen op de computer/notebook aan te sluiten, als deze is ingeschakeld.
Belangrijk!
Laad de vluchtaccu in de quadcopter uitsluitend met behulp van de bijbehorende oplaadkabel op. Probeer
nooit om de accu in de quadcopter met andere of ongeschikte opladers op te laden!
13
Page 14
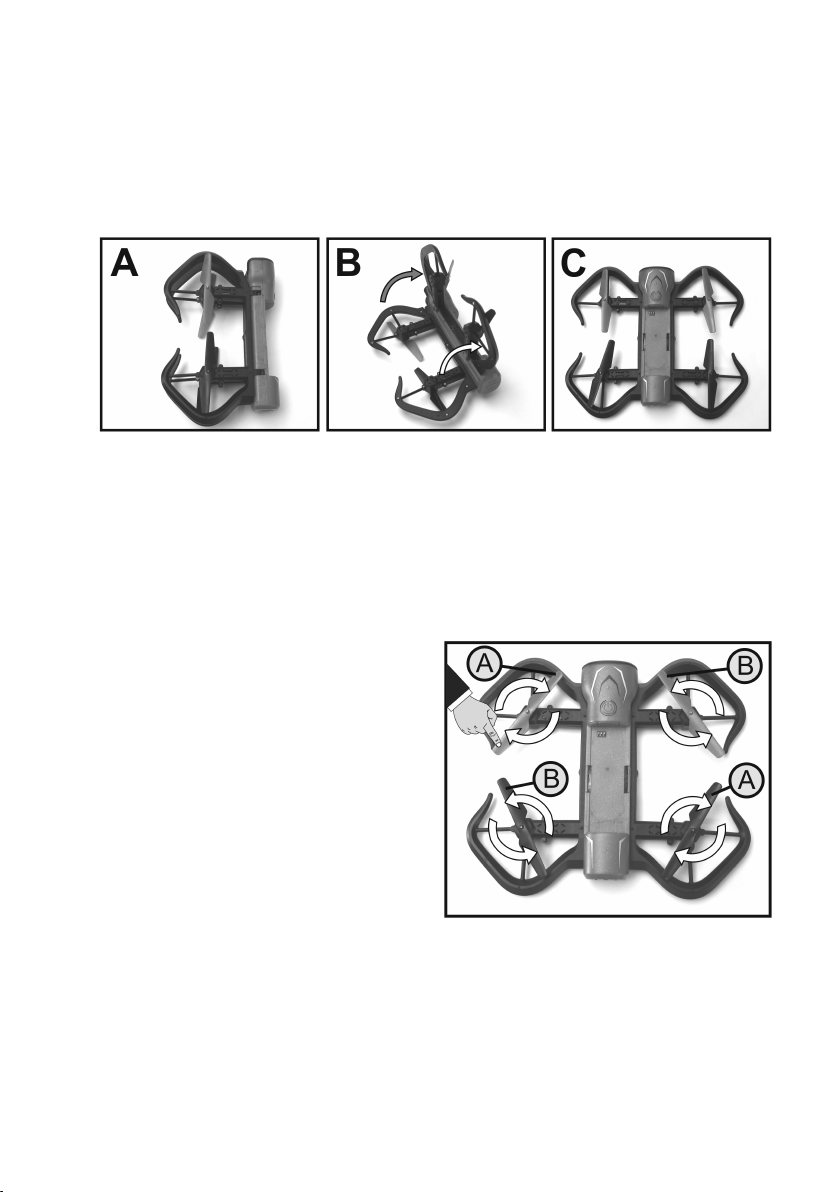
b) In- en uitklappen van de propellerarmen
De vier propellerarmen met de propellers en beschermbeugels, kunnen voor ruimtebesparend transport worden ingeklapt (zie afbeelding 5, illustratie A).
De voorste en achterste propellerarm aan iedere kant zijn mechanisch met elkaar verbonden en worden gezamenlijk
in- of uitgeklapt (zie afbeelding 5, illustratie B).
Als beide kanten zijn ingeklapt, ligt de quadcopter vlak op de ondergrond (zie afbeelding 5, illustratie C).
Afbeelding 5
c) Controle van de aandrijving
Voordat u de quadcopter in gebruik kunt nemen, is het vereist de aandrijving te controleren. Het model kan alleen met
het laagste energieverbruik vliegen als alle vier de propellers licht lopen en absoluut ronddraaien. Om deze redenen
moet u de functie van de aandrijfpropellers voor iedere vlucht kort controleren.
Draai daartoe iedere afzonderlijke propeller voorzichtig met een vinger rond en controleer het ronddraaien en licht
lopen.
Let daarbij op de draairichtingen van de verschillende propellers. Twee propellers draaien van boven gezien met de
klok mee (A) en twee propellers draaien tegen de klok in
(B).
14
Afbeelding 6
Page 15

d) Plaatsen van de vluchtaccu
De vluchtaccu (1) wordt van boven op de quadcopter gezet.
Het is daarbij belangrijk dat de aansluitcontacten van de
quadcopter (2) stevig op de aansluitbussen van de vluchtaccu (3) aansluiten.
De vergrendeling van de vluchtaccu bestaat uit twee lippen
(4), die aan de zijkant op de vluchtaccu zijn aangebracht.
Druk de beide geribbelde vlakken (5) rechts en links op de
vluchtaccu licht naar binnen en til de accu er naar boven af
om de accu weer af te nemen.
Belangrijk!
Als u de quadcopter niet gebruikt, bijv. bij trans-
port en opslag, verwijder dan altijd de accu uit
de quadcopter.
Afbeelding 7
15
Page 16

e) De quadcopter inschakelen
De ontvanger en zender moeten dezelfde digitale codering (koppeling) hebben, zodat de ontvanger in de quadcopter
op de signalen van de zender kan reageren. Daarom is het belangrijk dat u de inschakelprocedure overeenkomstig
de volgende beschrijving uitvoert.
Schuif de opgeladen vluchtaccu eerst overeenkomstig de voorgaande beschrijving in de quadcopter en zet de quadcopter op een vlakke ondergrond.
Houd de functietoets van de quadcopter (2) ingedrukt totdat de groene led op de achterkant van de quadcopter (3)
begint te knipperen.
Druk daarna op de druktoets voor de aan-/uitfunctie (zie
ook afbeelding 1, pos. 5) op de zender van de afstandsbediening. De rode led in de handzender knippert (zie ook
afbeelding 1, pos. 4).
Schuif daarna de stuurknuppel voor de vlieghoogte- en
gierfunctie (zie ook afbeelding 1, pos. 1) volledig naar boven. De zender laat daarbij een signaaltoon horen en de
groene led op de quadcopter knippert sneller.
Beweeg daarna de stuurknuppel volledig naar beneden.
De zender laat een signaaltoon horen en de rode ledindicator in de zender gaat constant branden.
De groene led in de quadcopter gaat na een geslaagde
koppeling ook constant branden.
Kort daarna geeft een blauwe led onder de functietoets
aan dat de cameramodule gebruiksklaar is.
De quadcopter is de startklaar.
Afbeelding 8
Belangrijk!
Tijdens de inschakelprocedure mag er zich geen tweede 2,4 GHz-zender in de onmiddellijke nabijheid
bevinden. De quadcopter mag bij de inschakelprocedure niet worden bewogen of gedraaid.
Houd de functietoets op de quadcopter net zolang ingedrukt, totdat de groene led op de achterkant uitgaat,
om de quadcopter weer uit te schakelen. Daarna kan ook de zender worden uitgeschakeld.
16
Page 17

f) Fundamentele informatie voor het besturen van quadcopters
Voordat u uw model voor de eerste keer start, moet u eerst de voor u beschikbare besturingsmogelijkheden leren
kennen om het model veilig te kunnen besturen.
De quadcopter wordt met behulp van de stuurknuppel op de zender van de afstandsbediening en door de beweging
van de zender bestuurt. Hierbij staan de volgende functies ter beschikking:
Hoogtefunctie
De vlieghoogte van een quadcopter wordt met behulp de vlieghoogtefunctie beïnvloed (zie afbeelding 9). De besturing vindt plaats met de stuurknuppel (zie ook afbeelding 1, pos. 1).
Als de motoren op afstand worden gestart, dan draaien ze in vrijloop. Als de stuurknuppel nu vanuit de middelste
stand naar voren wordt geduwd, worden de toerentallen van de propellers verhoogd en stijgt de quadcopter op. Als
de gewenste vlieghoogte is bereikt, kan de stuurknuppel in de middelste stand worden gezet. De quadcopter zweeft
nu op basis van de barometrische sensor op een bij benadering gelijkblijvende vlieghoogte.
Wanneer de stuurknuppel verder naar voren wordt geschoven, stijgt de quadcopter. Als de stuurknuppel wordt teruggetrokken, daalt de quadcopter (zie pijlen in afbeelding 9).
Afbeelding 9
17
Page 18

Gierfunctie
Door de twee rechtsdraaiende en twee linksdraaiende propellers, zijn de draaimomenten die op het model inwerken,
evenwichtig en zweeft de quadcopter stabiel in de lucht.
Als de stuurknuppel (zie ook afbeelding 1, pos. 1) naar links beweegt, verhoogt de elektronica in het model het
toerental van de van boven gezien naar rechts (met de klok mee) draaiende propellers en vermindert gelijktijdig het
toerental van de naar links (tegen de klok in) draaiende propellers. Daardoor blijft de totale stijgkracht gelijk, maar er
werkt nu een draaimoment op het model, dat de quadcopter van boven gezien om de verticale as naar links draait
(zie pijlen in afbeelding 10).
Als de stuurknuppel naar rechts wordt bewogen, worden de wijzigingen van het toerental van de propellers precies
omgekeerd en draait het model naar rechts.
Afbeelding 10
Rolfunctie
U kunt de quadcopter met behulp de rolfunctie zijwaarts naar rechts en links bewegen (zie afbeelding 11). De besturing vindt plaats door de beweging van de zender van de afstandsbediening.
Als de zender om de lengteas naar links wordt gekanteld, worden door de elektronica in de quadcopter de toerentallen
van de propellers zodanig gewijzigd, dat het model licht naar links opzij wendt en dus ook naar links vliegt (zie pijlen
in afbeelding 11).
Als de zender over de lengteas naar rechts wordt gekanteld, worden de wijzigingen van het toerental van de propellers precies omgekeerd en vliegt het model zijwaarts naar rechts.
18
Afbeelding 11
Page 19

Knikfunctie
U kunt de quadcopter met behulp van de knikfunctie naar voren en achteren bewegen (zie afbeelding 12). De besturing vindt plaats door de beweging van de zender van de afstandsbediening.
Als de voorzijde van de zender naar beneden wordt gekanteld, worden door de elektronica in de quadcopter de
toerentallen van de propellers zo gewijzigd, dat het model licht naar voren wendt en dus ook naar voren vliegt (zie
pijlen in afbeelding 12).
Als de voorzijde van de zender naar boven wordt geheven, worden de wijzigingen van het toerental van de propellers
precies omgekeerd en vliegt het model naar achteren.
Afbeelding 12
19
Page 20

g) Praktische vliegtips voor de eerste start
Voer voor iedere start een kalibratie van de positiesensors uit. De precieze handelwijze wordt in het volgende hoofdstuk beschreven.
Ook al kan het model later in een krappe ruimte worden gevlogen, raden wij u aan om voor de eerste vliegpogingen
een vrije ruimte van ong. 3 x 3 m te kiezen.
Als u de eerste vlucht in de openlucht uitvoert, moet er absolute windstilte zijn.
Ga precies achter de quadcopter staan. Zolang u het model van achteren ziet, reageert het vanuit uw gezichtspunt
op de besturingsopdrachten rechts, links, vooruit en achteruit precies zoals u deze op de zender bestuurt. Als het
model echter met de camera naar u wijst, reageert het vanuit uw gezichtspunt precies tegengesteld aan de besturing
op de zender.
Laat de quadcopter na de start tot ooghoogte opstijgen. Zo kan de vliegpositie optimaal worden herkend en vliegt de
quadcopter duidelijk stabieler dan vlak bij de grond. Als de quadcopter zo laag vliegt dat de door de propellers naar
onder geblazen lucht tot de grond reikt, is de vliegpositie duidelijk minder stabiel.
Als de propellers tegen voorwerpen aanstoten en worden geblokkeerd, schakel dan onmiddellijk de aan-
drijfmotoren uit, zodat deze niet verder van stroom worden voorzien.
Opgelet, belangrijk!
Probeer nooit om de vliegende quadcopter met de hand te grijpen. Er bestaat verhoogd gevaar op letsel!
Als de groene led aan de achterkant van de quadcopter begint te knipperen, heeft de vluchtaccu zijn onderste spanningsgrens bereikt. Onderbreek de vlucht in dit geval onmiddellijk en laad de vluchtaccu weer op, om een voor de
vluchtaccu schadelijke diepe ontlading te vermijden.
Als u de quadcopter buiten gebruikt, let dan op de vliegafstand. Hoe verder de quadcopter van u af is, hoe slechter
de herkenning van de vluchtpositie. Bovendien heeft de radiograsche afstandsbediening een beperkt bereik van
ong. 30 - 50 m.
Schakel de zender nooit uit, zolang de quadcopter vliegt.
20
Page 21

11. Kalibratie van de positiesensors
U moet voordat u de quadcopter start de positiesensors kalibreren. Daardoor wordt verzekerd dat de quadcopter
rustig op zijn plaats zweeft en niet automatisch en zonder besturingsopdracht in een richting vliegt.
Ga daarbij als volgt te werk:
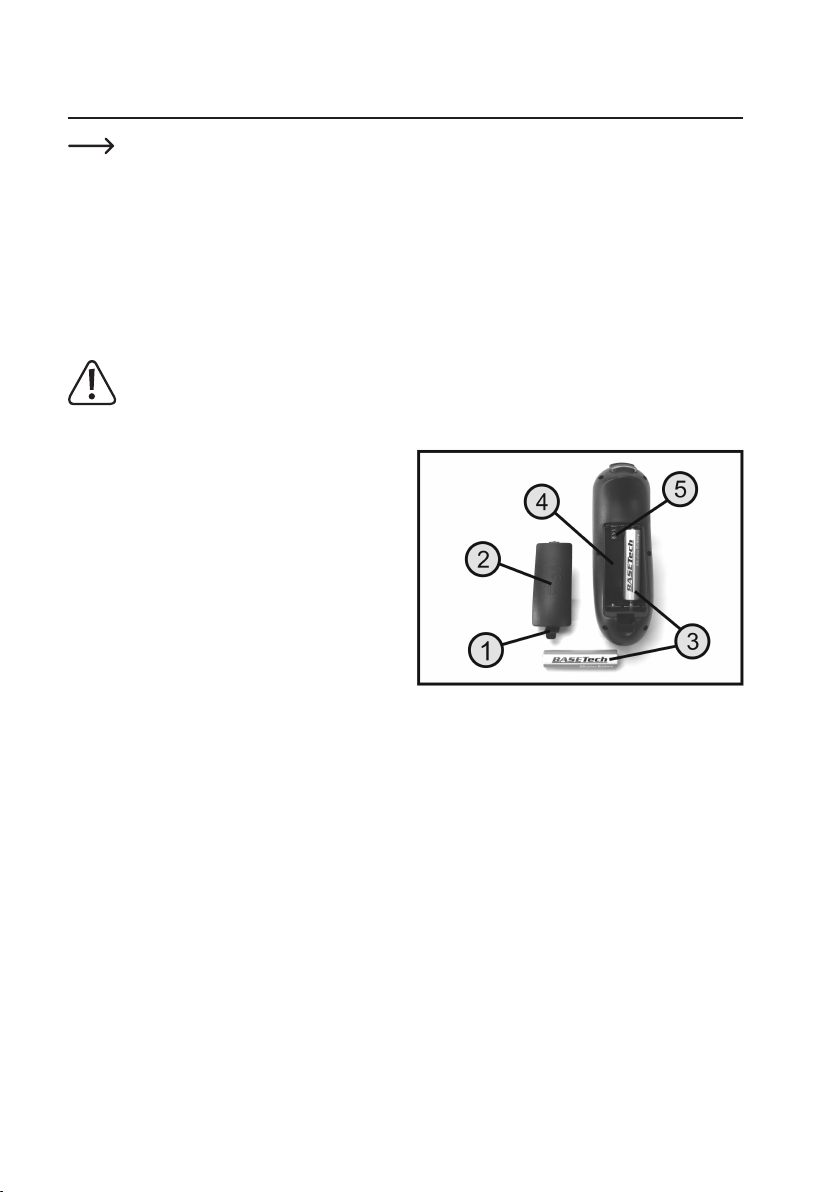
Schakel allereerst de quadcopter in met de functietoets (2)
en zet hem dan op een vlakke, horizontale ondergrond.
Schakel daarna de zender in en beweeg de stuurknuppel
(1) volledig naar voren en weer terug.
Als de blauwe led onder de functietoets, de groene led (3)
op de quadcopter en de rode led in de zender (4) constant
branden, is de quadcopter startklaar.
Druk nu op de drukknop voor de kalibratie van de sensors (7). De zender laat een lange signaaltoon horen en
de groene led aan de achterkant van de quadcopter (3)
begint te knipperen.
De groene led op de quadcopter gaat na ong. 2 seconden, als de kalibratie met succes is voltooid, weer constant
branden.
Als u later tijdens het vliegen vaststelt dat de quadcopter
toch in een bepaalde richting wil vliegen, herhaal dan de
kalibratieprocedure. Let er daarbij echter op dat de quadcopter absoluut horizontaal staat.
Afbeelding 13
21
Page 22

12. Starten van de quadcopter
De quadcopter kan worden gestart nadat u de quadcopter en de zender hebt ingeschakeld en een geslaagde kalibratie van de sensors hebt uitgevoerd.
Beweeg daartoe de stuurknuppel volledig naar voren en weer terug. De propellers starten en draaien op een laag
toerental. Om de propellers na het starten weer te stoppen, moet de linker stuurknuppel in de onderste stand worden
gezet en net zo lang worden vastgehouden totdat de propellers stilstaan.
Er zijn twee methoden beschikbaar om de quadcopter te laten opstijgen:
Handmatige start:
Beweeg de stuurknuppel (1) met gevoel naar voren, wanneer de propellers op een laag toerental draaien. De quadcopter verhoogt de toerentallen van de propellers duidelijk
en stijgt op.
U kunt door het wenden en kantelen van de radiograsche afstandsbesturing eventueel naar voren, achteren of
zijwaarts afdrijven licht corrigeren. Als de gewenste vlieghoogte is bereikt, zet dan de linker stuurknuppel terug in
de middelste stand. De quadcopter gaat over naar zweefvlucht op gelijkblijvende hoogte.
De vlieghoogte en de vliegrichting kunnen met behulp van
stuurknuppel en door het bewegen van de zender afzonderlijk worden bestuurd.
Automatische start:
Bedien de druktoets voor de start- en landingsfunctie kort (zie afbeelding 14, pos. 2) als de propellers op een laag toerental draaien. Het toerental van de propellers wordt verhoogd en de quadcopter stijgt snel op. Hij stijgt automatisch
op tot ong. 80 - 100 m hoogte en gaat vervolgens automatisch over naar zweefvlucht.
De vlieghoogte en de vliegrichting kunnen met behulp van de zender van de afstandsbediening afzonderlijk worden
bestuurd.
De quadcopter is voorzien van een automatische hoogtestabilisatie. Deze stabilisatie neemt de luchtdruk
als referentie voor de actuele vlieghoogte. Aangezien de meetwaarden bij minimale hoogtewijzigingen
slechts gering wijzigen, kunnen lichte schommelingen in de vlieghoogte niet worden vermeden.
Afbeelding 14
22
Page 23

13. Landen van de quadcopter
Er zijn twee methoden beschikbaar om de quadcopter te landen:
Methode 1:
Als de quadcopter zich in zweefvlucht bevindt, reduceer dan de vlieghoogte voorzichtig met de stuurknuppel (zie
afbeelding 14, pos. 1), totdat de quadcopter weer veilig op het landingsgestel staat.
Als de quadcopter is geland, zet dan de stuurknuppel in de onderste stand en houd hem dan in deze stand vast, totdat
de propellers stil blijven staan.
De quadcopter kan nu worden uitgeschakeld.
Methode 2:
Als de quadcopter zich in zweefvlucht bevindt, bedien dan de toets voor de automatische start- en landingsfunctie
(zie afbeelding 14, pos. 2).
De quadcopter vermindert nu automatisch de vlieghoogte, totdat deze weer op het landingsgestel staat. Tijdens
de landingsprocedure is de quadcopter nog steeds volledig bestuurbaar via de gier-, knik- en rolfunctie en kan het
landingspunt indien nodig worden gecorrigeerd.
De propellers blijven na de landing van de quadcopter automatisch stilstaan.
De quadcopter kan nu worden uitgeschakeld.
23
Page 24

14. Omschakelen beginner/sport/expert
De afstandsbediening biedt u met behulp van de omschakeling beginner/sport/expert de mogelijkheid om de stuurgevoeligheid van de quadcopter afzonderlijk in te stellen (dubbele snelheidsfunctie). U beschikt over de volgende modi:
• Beginnersmodus
De beginnersmodus wordt na het inschakelen van de zender van de afstandsbediening automatisch geactiveerd. In
deze vliegmodus reageert de quadcopter minder sterk op de besturingsopdrachten van de zender en laat zich dus
zeer gevoelig besturen. Deze modus is ideaal geschikt voor beginners, die voor de eerste keer met de quadcopter
vliegen.
• Sportmodus
De quadcopter reageert in de sportmodus duidelijk soepeler op de besturingsopdrachten van de zender. Om deze
reden is deze modus ideaal geschikt voor gevorderde gebruikers.
• Expertmodus
In de expertmodus beschikt u over de maximale stuurgevoeligheid. Deze instelling is bestemd voor ervaren gebruikers en voor gebruik van de quadcopter buiten
Activering van de verschillende vliegmodi:
Na het inschakelen bevindt de zender zich automatisch in
de beginnersmodus.
Druk kort op de druktoets voor de beginner-, sport- en
expertmodus (zie ook afbeelding 1, pos. 9), om van de
beginnersmodus naar de sportmodus om te schakelen. De
zender laat twee korte signaaltonen horen en geeft zo de
activering van sportmodus aan.
Als er weer op de druktoets (9) wordt gedrukt, laat de zender drie signaaltonen horen en geeft zo het omschakelen
naar de expertmodus aan.
Als er weer op de druktoets voor de beginner-, sport- en
expertmodus wordt gedrukt, dan schakelt de zender terug
naar de beginnersmodus. De zender laat daarbij een signaaltoon horen.
Afbeelding 15
24
Page 25

15. Flipfunctie
Er kunnen met de quadcopter indien gewenst ook salto's (ips) worden gevlogen. U moet de eerste ips bij windstilte
buiten vliegen. Laat daartoe de quadcopter opstijgen tot een veilige hoogte van ong. 2 - 3 m en laat deze vervolgens
op zijn plaats zweven.
Druk van boven op de stuurknuppel (zie ook afbeelding 1,
pos. 1) om de zender in de ipmodus te zetten. Om aan te
geven dat de zender naar de ipmodus is geschakeld, laat
deze doorlopend korte signaaltonen horen.
Draai de zender, zoals bij de rolbesturing is beschreven,
snel naar rechts of links en daarna weer terug in de normale stand.
Als de zender de opdracht heeft herkend, houden de signaaltonen op. De quadcopter stijgt kort verder op en voert
dan de ip naar de gewenste kant uit.
Na de salto gaat de quadcopter weer over naar de zweefvlucht.
Om een volgende salto te kunnen vliegen, moet er opnieuw van boven op de stuurknuppel worden gedrukt.
Als de groene led aan de achterkant van de quadcopter begint te knipperen, heeft de vluchtaccu zijn
onderste spanningsgrens bereikt. In dit geval is de ipfunctie gedeactiveerd.
Afbeelding 16
25
Page 26

16. Vliegen in koploze modus
De bewegingsrichting van de quadcopter is altijd afhankelijk van de richting waarin het model door de piloot is gericht of
van welke zijde de piloot tegen de quadcopter aankijkt. Men kan ook zeer snel verkeerd sturen als men het model niet
van achteren, maar van de zijkant of van voren ziet. Om deze reden is de quadcopter voorzien van de koploze modus.
Om de koploze modus effectief te kunnen gebruiken, is het echter noodzakelijk dat de quadcopter voor het inschakelen in de gewenste voorwaartse richting wordt gericht (zie witte pijl in afbeelding 17, illustratie A).
Zolang de piloot van het model dan precies achter de quadcopter staat en in de vooraf vastgelegde voorwaartse
richting kijkt, reageert de quadcopter vanuit zijn standpunt zoals deze op de zender wordt bestuurd. Als naar voren
wordt gestuurd, vliegt de quadcopter vanuit het standpunt van de piloot ook naar voren (zie donkere pijl in afbeelding
17, illustratie B).
Als de quadcopter in de vlucht bijv. 90° naar links is gedraaid en nu met de linkerzijde naar de piloot is gericht, vliegt
deze uit het standpunt van de piloot naar links, als op zender naar voren wordt gestuurd (zie donkere pijl in afbeelding
17, illustratie C).
Bij activering van de koploze modus speelt het geen rol, in welke richting de voorzijde van de quadcopter is gericht.
Als op de zender naar voren wordt gestuurd, vliegt de quadcopter altijd in de richting die bij het inschakelen als naar
voren werd vastgelegd (zie donkere pijl in afbeelding 17, illustratie D).
Normale modus
Afbeelding 17
Druk kort op de druktoets (6) voor de koploze-/achteruitfunctie (zie ook afbeelding 1, pos. 6) om de koploze modus
in te schakelen. De zender laat een korte signaaltoon horen en de groene led op de achterkant van de quadcopter
(zie afbeelding 8, pos. 3) knippert langzaam om aan te geven dat de koploze modus is geactiveerd. De quadcopter
vliegt nu in koploze modus.
Druk opnieuw op de druktoets voor de koploze functie (6)
om de koploze modus weer uit te schakelen. De quadcopter vliegt nu weer in de normale modus.
26
Normale modus Koploze modus
Afbeelding 18
Page 27

17. Achteruitfunctie
De quadcopter beschikt over een achteruitfunctie, waarbij deze automatisch achteruit vliegt. Ook precies in de tegenovergestelde richting als die bij het inschakelen als voorwaartse richting (zie witten pijl in afbeelding 19, illustratie A)
werd vastgelegd. Daarbij speelt het tevens geen rol, net zoals bij de koploze modus, in welke richting de voorzijde van
de quadcopter op dat moment is gericht (zie afbeelding 19, illustratie B).
Belangrijk!
De achteruitfunctie mag alleen worden geactiveerd als de quadcopter in de vooraf vastgelegde voorwaart-
se richting te ver van de piloot is verwijderd en de piloot met de quadcopter een lijn in de voorwaartse richting vormt. Als de quadcopter zijwaarts is verplaatst, dan vliegt deze bij activering van de achteruitfunctie
zijdelings langs de piloot en zal weer weer weggaan (zie afbeelding 19, illustratie C).
Achteruitfunctie
Achteruitfunctie
Afbeelding 19
Houd de druktoets voor de achteruitfunctie ingedrukt (zie afbeelding 18, pos. 3) om de achteruitfunctie te activeren.
De zender laat een korte signaaltoon horen om aan te geven dat de achteruitfunctie is geactiveerd. De quadcopter
wendt in de achteruitrichting en begint achteruit te vliegen.
Als de quadcopter ver genoeg achteruit is gevlogen, beweeg dan de zender in een willekeurige richting, net zoals bij
de knik- en rolbesturing, en de achteruitfunctie wordt automatisch beëindigd.
Opgelet, belangrijk!
Als u de achteruitfunctie activeert, mag de zender van de afstandsbediening niet gelijktijdig worden bewo-
gen, omdat de functie daardoor gelijk weer wordt uitgeschakeld. De quadcopter kantelt dan nog eenmaal
kort naar achteren en blijft daarna in zweefvlucht vliegen.
27
Page 28

18. Smartphone-app installeren
De quadcopter beschikt over een Wi-Fi-functie en kan dus met een smartphone worden verbonden. Daarvoor moet
u eerst een speciale app op uw smartphone installeren. Er ontstaan hiervoor eventueel alleen kosten, die gewoonlijk
door een download kunnen ontstaan. De app zelf is gratis.
Scan, afhankelijk van het besturingssysteem van uw smartphone (iOS resp. Android), een van de volgende QRcodes. Door het scannen wordt u automatisch doorgestuurd naar de actuele versie van de app.
QC-code voor iOS QR-code voor Android
Zoek alternatief voor het besturingssysteem iOS in de "Apple Store" en voor het besturingssysteem Android in de
"Google Play Store" naar de app "XT-GO".
a) Open de app
U kunt de app openen nadat u deze met succes op uw smartphone hebt geïnstalleerd.
Aangezien de app doorlopend verder wordt ontwikkeld, kan het zijn dat er in de huidige app nieuwe func-
ties zijn geïntegreerd die nog niet in deze handleiding zijn opgenomen. Als er in dit geval vragen over de
functionaliteit opkomen, gebruik dan de hulpfunctie van de app.
In afbeelding 20 ziet u de startpagina van de app. U hebt
daar drie keuzemogelijkheden:
1 Tandwielsymbool = instellingen uitvoeren
2 Vraagtekensymbool = hulp openen
3 Mapsymbool = (op)genomen foto's en video's bekijken
4 FLY = smartphonebesturing activeren
5 PVE = spel toegevoegde realiteit starten
6 Afbeelding quadrocopter = modelselectie
7
Om de app een werkende koppeling met de quadcopter tot stand te laten brengen, is het belangrijk om op
de startpagina de afbeelding van de quadcopter "Foldable Drone G-Sense RtF" (zie afbeelding 20, pos. 6)
te selecteren. Gebruik de veegfunctie of de zijwaartse navigatiepijlen om de afbeelding van de quadcopter
te wisselen.
De knop "PVE" (zie afbeelding 20, pos. 5) kan alleen worden gebruik als de quadcopter per WLAN met de
smartphone is verbonden.
Afbeelding 20
28
Page 29

b) Instellen
Als u op het tandwielsymbool (zie afbeelding 20, pos. 1)
hebt getikt, verschijnt er een nieuwe weergave, waarin u
de volgende functies kunt instellen:
1 Volume-instelling van de muziek
2 Volume-instelling van de geluidseffecten
3 Selecteren van de menutaal
4 Terug naar startpagina van de app
c) Hulpfunctie
U kunt met behulp van het vraagtekensymbool (zie afbeelding 20, pos. 2) de actuele hulpfunctie openen. Deze
functie is nuttig als de actuele versie van de app van de in
deze handleiding beschreven versie afwijkt.
U kunt met de veegfunctie naar links en rechts door de pagina's bladeren. U kunt met de pijlsymbolen (1) terugkeren
naar startpagina van de app.
Afbeelding 21
Afbeelding 22
29
Page 30

d) Bediening
Druk op de knop "FLY" (zie afbeelding 20, pos. 4), waarna
het volgende bedieningsoppervlak wordt geopend:
De in afbeelding 23 getekende achtergrondafbeelding verschijnt uitsluitend als de app bij uitgeschakelde quadcopter werd geactiveerd. Als er een WLAN-verbinding met de
quadcopter bestaat, is het camerabeeld in de achtergrond
te zien.
Afbeelding 23
De in afbeelding 23 getekende symbolen hebben de volgende functies:
1 Terug naar startpagina van de app
2 Neem een foto met de camera van de quadcopter. De opslag van de foto's vindt plaats op de smartphone.
3 Maak een video met de camera van de quadcopter. De opslag van de video's vindt plaats op de smartphone.
4 VR-omschakeling om de smartphone in een VR-bril (niet in de leveringsomvang inbegrepen) te kunnen gebruiken.
5 Spraakbesturing in- of uitschakelen
6 Virtuele stuurknuppel incl. trimaanduiding weergeven of verbergen
7 Omschakeling voor de modi beginner, sport en expert De stuurgevoeligheid bedraagt 30%, 60% en 100%
8 Knop voor de koploze modus
9 Knop voor kalibratie van de sensors
10 Knop voor de ipfunctie
11 In de modus zwaartekrachtsensor wordt de knik- en rolbeweging van de quadcopter door kantelen en wenden
van de smartphone bestuurd
12 Trackingmodus in- en uitschakelen
Aanwijzingen voor FPV-bedrijf
Door de live overdracht van de camerabeelden op de smartphone is het zgn. "FPV-bedrijf" (FPV = First Person View
= vliegen op het videobeeld) mogelijk.
Opgelet!
Een puur FPV-gebruik brengt een ongevalsrisico met zich mee omdat u obstakels door de weergegeven
Voor een storingsvrije overdracht van videosignalen mogen geen andere zenders op het 2,4 GHz-zendbe-
camerabeelden misschien niet of niet op tijd kunt zien. Daarom moet een FPV-gebruik altijd door een copiloot worden geobserveerd, zodat deze tijdig kan waarschuwen voor gevaren. Het kost ook veel oefening
om het model via FPV-bedrijf te vliegen. Zorg er bovendien vooral in de leerfase voor dat het geselecteerde
vliegveld vrij is van obstakels en ver weg van mensen, dieren, gebouwen en wegen.
reik van het model aanwezig zijn. De functie “Bluetooth®” op de smartphone moet zijn gedeactiveerd.
30
Page 31

19. Foto's en video's (op)nemen
De quadcopter beschikt over een ingebouwde HD-camera, die in de vliegrichting schuin naar beneden is gericht. Met
behulp van deze camera kunnen video's of ook foto's tijdens de vlucht op een smartphone (niet in de leveringsomvang
inbegrepen) worden (op)genomen.
Neem de quadcopter en daarna de zender in bedrijf. De led in de quadcopter en in de zender moeten constant
branden.
Open daarna in de smartphone in de instellingen het instelmenu voor de WLAN-verbindingen.
Na korte tijd verschijnt de WLAN-verbinding van de quadcopter (bijv. XT-XXXXXX) op het scherm van de smartphone.
Activeer deze WLAN-verbinding, zodat de quadcopter en de smartphone onderling gegevens kunnen uitwisselen.
Verlaat in de smartphone de instellingen en open de quadcopter-app "XT-GO". Selecteer in het startscherm de afbeelding van de quadcopter "Foldable Drone G-Sense RtF".
Zodra u de knop "Play" activeert, toont de smartphone het actuele camerabeeld.
De hellingshoek van de camera (1) kan naar behoefte met
de hand op de gewenste waarde worden ingesteld.
De quadcopter is startklaar voor de cameravlucht.
Om foto's of video (op) te kunnen nemen, moet op de zender van de afstandsbediening op de drukknop voor de het
(op)nemen van foto's en video (zie afbeelding 1, pos. 8)
worden gedrukt. Als er kort op de knop wordt gedrukt, dan
wordt er een foto genomen. Als er langer op de knop wordt
gedrukt, wordt er een video opgenomen. Om dit aan te geven, knippert de groene led op de achterkant van de quadcopter (zie afbeelding 8, Pos. 3) in een tweetraps ritme.
Als alternatief kunnen ook de betreffende knoppen op de
smartphone (zie afbeelding 23, pos. 2 of 3) worden aangetikt. De lopende video-opname wordt in dit geval alleen
op de smartphone aangegeven. De led op de quadcopter
knippert niet.
De foto's en video's worden direct op de smartphone opgeslagen en kunnen met behulp van de weergavefunctie (zie
afbeelding 20, pos. 3) worden bekeken.
Praktische tip:
Als tijdens de vlucht een video wordt opgenomen, is het noodzakelijk om de quadcopter met gevoel en zonder jachtige stuurbewegingen te vliegen. Bij jachtige stuurbewegingen werkt de video zeer onrustig.
U kunt ook foto's en video's (op)nemen als de quadcopter met behulp van de smartphone wordt bestuurd. Omdat de
meegeleverde zender van de afstandsbediening echter een meer jngevoelige besturing mogelijk maakt, raden wij
aan om de zender voor video-opnamen te gebruiken.
Belangrijke aanwijzing!
Let op de wettelijke regelingen van uw land betreffende het (op)nemen van foto's en video's van personen,
objecten en inrichtingen en de publicatie hiervan. Alleen u hebt de volledige verantwoordelijkheid voor het
geval dat door gebruik van de camera rechten, wetten of regelgeving worden geschonden.
Afbeelding 24
31
Page 32

20. De smartphone als afstandsbediening
Let op, belangrijke aanwijzing!
De besturing van de quadcopter per smartphone is duidelijk trager dan de besturing via de meegeleverde
Wij raden voor de eerste vliegpogingen een windstille dag en een voldoende groot vlieggebied zonder hindernissen
aan.
a) Smartphonebesturing activeren
Neem ten eerste de quadcopter in bedrijf. De led aan de achterkant van de quadcopter moet knipperen.
Open in de instellingen van de smartphone het instelmenu voor de WLAN-verbindingen.
De WLAN-verbinding van de quadcopter (bijv. XT-XXXXXX) verschijnt na korte tijd op het scherm van de smartphone.
Activeer deze WLAN-verbinding, zodat de quadcopter en de smartphone onderling gegevens kunnen uitwisselen.
Verlaat in de smartphone de instellingen en open de quadcopter-app "XT-GO".
Selecteer in het startscherm de afbeelding van de quadcopter "Foldable Drone G-Sense RtF".
Zodra u de knop "Play" activeert, toont de smartphone het actuele camerabeeld.
Druk op de knop "OFF" (6), zodat de virtuele stuurknuppel
(13 en 14) en de trim (15) in het beeld worden weergegeven. De weergave van de knop (6) wijzigt van "OFF"
naar "ON".
Na ong. twee seconden is de koppeling tussen de smartphone en de quadcopter afgesloten en gaat de led op de
achterkant van de quadcopter constant branden.
Praktische tip:
Om de quadcopter beter op de bewegingen van de virtuele
stuurknuppel te laten reageren, moet u met behulp van de
knop voor omschakeling van de dubbele snelheid (7) de
stuurgevoeligheid op 60% of 100% instellen.
zender van de afstandsbediening. Daarom vereist het wat oefening, totdat men aan de besturing is gewend. Voer daarom de eerste vliegpogingen op een voldoende groot oppervlak uit, zodat de quadcopter
niet tegen mensen, dieren of voorwerpen kan vliegen.
32
Afbeelding 25
Page 33

b) Besturingsfuncties van de app
Kalibreer de positiesensors terwijl de quadcopter op een vlak startoppervlak staat. Druk daartoe op de betreffende
knop (zie afbeelding 25, Pos. 9) op het scherm. De knop wordt helderder en de groene led op de achterkant van de
quadcopter (zie afbeelding 8, Pos. 3) begint te knipperen. Na het voltooien van de kalibratie brandt de knop weer
donkerder en brandt de led op de quadcopter constant.
De besturing vindt nu plaats met behulp van de beide virtuele stuurknuppels. De functie van de linker stuurknuppel
(zie afbeelding 25, Pos. 13) komt overeen met de functie van de stuurknuppel op de zender van de afstandsbediening. De knik- en rolfunctie wordt met de rechter stuurknuppel (zie afbeelding 25, pos. 14) bestuurd.
Daarnaast bestaat de mogelijkheid om de quadcopter te trimmen. Als de quadcopter bijv. in zweefvlucht licht naar
links drijft, dan moet bij het trimmen onder de rechter stuurknuppel op de knop (+) worden gedrukt, totdat de quadcopter weer op zijn plaats zweeft. De aanduiding van de trim (zie afbeelding 25, pos. 15) belandt buiten de middelste
stand. Als de quadcopter naar rechts drijft, dan moet onder de rechter stuurknuppel op de knop (-) worden gedrukt.
Voor de knik- en gierfunctie zijn eveneens triminstellingen beschikbaar, die volgens hetzelfde schema functioneren.
Als de trim zeer ver moet worden versteld, land de quadcopter dan op een vlakke ondergrond, stel alle trims weer in
op de middelste stand en kalibreer de positiesensors.
Beweeg voor het starten van de propellers de linker virtuele stuurknuppel (13) naar linksonder en de rechter virtuele
stuurknuppel (14) naar rechtsonder (zie lichte pijl in afbeelding 26). Houd beide stuurknuppels in deze stand totdat
de propellers beginnen te draaien. Zet de stuurknuppels
weer in de middelste stand als de propellers draaien.
Zet om de propellers weer te stoppen, de linker stuurknuppel (13) in de onderste stand en houd hem daar, totdat de
propellers stilstaan (zie donkere pijl in afbeelding 26). Als
alternatief daarvoor kan op de knop voor de motornoodstopfunctie (18) worden gedrukt.
Opgelet, belangrijk!
Activeer de motornoodstopfunctie (18) nooit als de quadcopter vliegt. In dit geval zou hij zonder aandrijving
naar beneden vallen en worden beschadigd.
Afbeelding 26
33
Page 34

c) Quadcopter via smartphone starten
Beweeg de linker virtuele stuurknuppel (13) met gevoel
naar voren, wanneer de propellers op een laag toerental
draaien. De quadcopter verhoogt de toerentallen van de
propellers duidelijk en stijgt op. Als alternatief daarvoor
kan ook de knop voor de automatische start (16) worden
gebruikt.
De besturing vindt dan plaats met behulp van de beide
virtuele stuurknuppels.
Afbeelding 27
d) Quadcopter via smartphone landen
Om de quadcopter te landen, reduceert u de vlieghoogte voorzichtig met de linker stuurknuppel (zie afbeelding 27,
pos. 13), totdat de quadcopter weer veilig op het landingsgestel staat. Als de quadcopter is geland, zet dan de stuurknuppel in de onderste stand en houd hem dan in deze stand vast, totdat de propellers stil blijven staan. Als alternatief
daarvoor kan ook de knop voor de automatische oplaadfunctie (zie afbeelding 27, pos. 17) worden gebruikt.
34
Page 35

e) Overige besturingsopties
Naast de besturing via de beide virtuele stuurknuppels, bestaat de mogelijkheid om de quadcopter via nog andere
opties te besturen.
Spraakbesturing
Als de knop voor de spraakbesturing (5) wordt geactiveerd, kan de quadcopter via spraakopdrachten worden bestuurd. De mogelijke spraakopdrachten zoals "Takeoff", "Landing", "Forward", "Backward", "RightSide" en "LeftSide"
worden bij het activeren van de spraakbesturing kort op het scherm weergegeven.
Modus zwaartekrachtsensor
Als de knop voor de modus zwaartekrachtsensor (11)
wordt geactiveerd, reageert de smartphone zoals de
meegeleverde zender van de afstandsbediening. De kniken rolbeweging wordt door kantelen en wenden van de
smartphone bestuurd. Voor de controle van deze functie
beweegt de rechter virtuele stuurknuppel zich naar gelang
de beweging van de smartphone.
Afbeelding 28
Trackingmodus
Als op de knoppen voor de trackingmodus (zie afbeelding
28, pos. 12) wordt getikt, wordt de rechter stuurknuppel
verborgen. In plaats daarvan kan op de smartphone met
de vinger een vliegbaan (1) worden getekend. Zodra de
vinger van het scherm wordt genomen, vliegt de quadcopter de via de getekende vliegbaan. Door opnieuw op het
scherm te tappen wordt de vliegbaan gewist en kan er een
nieuwe vliegbaan worden getekend.
Afbeelding 29
Let op, belangrijke aanwijzingen!
Test de spraakbesturing eerst zonder de motoren op de quadcopter te starten. U kunt aan de hand van de
Als u de quadcopter later met een van deze beide modi wilt besturen, let er dan op dat u voldoende ruimte
reacties van de virtuele stuurknuppel gemakkelijk herkennen of de spraak- of stuuropdrachten juist worden
omgezet en hoe traag de besturing reageert.
hebt en met de quadcopter niet tegen mensen, dieren of hindernissen vliegt.
35
Page 36

21. Spel toegevoegde realiteit
Naast de besturingsfuncties en het (op)nemen van foto's of video, biedt de app ook nog een spel voor toegevoegde
realiteit. Daarbij worden virtuele luchtvaartuigen in het werkelijke camerabeeld weergegeven.
Om het spel te starten, moet allereerst een WLAN-verbinding met de quadcopter tot stand worden gebracht. Alleen
dan kan de knop "PVE" (zie afbeelding 20, pos. 5) worden gebruikt.
Selecteer in het startscherm de afbeelding van de quadcopter "Foldable Drone G-Sense RtF".
Zodra u de Knop "PVE" activeert, toont de smartphone het actuele camerabeeld, waarin de virtuele luchtvoertuigen
worden weergegeven.
In tegenstelling tot de vliegmodus, zijn in het spel voor toegevoegde realiteit de modi VR, spraakbesturing, zwaartekrachtsensor en tracking gedeactiveerd. De resterende besturingsmogelijkheden zijn identiek aan de FLY-modus.
Met behulp van kanonnen (1), raketten (2) en bommen (3)
kunnen de vijandelijke luchtvaartuigen worden bestreden.
De actuele puntenstand (4) en een aanduiding voor de levensstatus (5) worden gelijktijdig weergegeven.
Druk op de knop "Off" (6), zodat de virtuele stuurknuppels
in het beeld worden weergegeven.
De quadcopter kan na de kalibratie van de positiesensors
worden gestart en met behulp van beide virtuele stuurknuppels worden bestuurd.
Door draaien en zwenken van de smartphone kunnen de
doelen exact in het vizier worden gekregen.
Opgelet, belangrijk!
Aangezien bij spellen de aandacht op het scherm van de smartphone is gericht en de quadcopter dus in de
FPV-modus vliegt, moet u de eerste pogingen om te spelen op een voldoende groot oppervlak uitvoeren.
Neem in dit verband ook de al eerder vermelde gevarenaanduidingen en tips voor vliegen in FTV-modus
in acht.
Afbeelding 30
36
Page 37

22. Onderhoud en verzorging
Reinig de buitenkant van het model en de afstandsbediening uitsluitend met een zachte, droge doek of kwast. U mag
in geen geval agressieve schoonmaakmiddelen of chemische oplosmiddelen gebruiken, omdat hierdoor het oppervlak van de behuizingen kan worden beschadigd.
De propellers moeten zich soepel laten bewegen en de motorassen mogen noch krom zijn, noch mag er zich speling
in de lagers voordoen. Propellers die zijn ingescheurd of geknikt of waarbij kleine delen zijn afgebroken, moeten in
ieder geval worden vervangen.
Vervangen van de propellers
De propellers (1) zijn slecht op de motorassen (2) van de
aandrijfmotoren gestoken en kunnen met gevoel naar boven van de as worden getrokken.
Let er bij het aftrekken op dat de motoras niet wordt verbogen.
Bij de selectie van de nieuwe propeller moet in ieder geval
op de draairichting worden gelet (zie ook afbeelding 6).
De nieuwe propeller moet direct van boven op de motoras
worden geplaatst en met gevoel tot aan de aanslag worden
geschoven.
Belangrijk!
Gebruik geen e kracht of ongeschikte gereed-
schappen.
Gebruik bij vervanging van mechanische onderdelen uitsluitend de door de fabrikant aangeboden originele reserveonderdelen.
De reserveonderdelenlijst vindt u op onze internetpagina www.conrad.com in het downloadbereik van het desbetreffende product.
Alternatief kunt u de reserveonderdelenlijst ook telefonisch aanvragen. De contactgegevens vindt u aan het begin van
deze gebruiksaanwijzing in hoofdstuk 1.
Afbeelding 31
37
Page 38

23. Afvoer
a) Product
Elektronische apparaten zijn herbruikbare afvalstoffen en horen niet bij het huishoudelijk afval. Voer het
product aan het einde van zijn levensduur volgens de geldende wettelijke bepalingen af.
Verwijder batterijen/accu's die mogelijk in het apparaat zitten en voer ze afzonderlijk van het product af.
b) Batterijen/accu’s
Als eindverbruiker bent u conform de KCA-voorschriften wettelijk verplicht om alle lege batterijen/accu’s in te leveren.
Batterijen/accu’s mogen niet met het huishoudelijk afval worden afgevoerd.
Batterijen/accu’s die schadelijke stoffen bevatten, worden aangegeven met het nevenstaande symbool. Dit
pictogram duidt erop dat afvoer via het huishoudelijk afval verboden is. De aanduidingen voor de zware
metalen die het betreft zijn: Cd = cadmium, Hg = kwik, Pb = lood (de aanduiding staat op de batterijen/
accu's bijv. onder het links afgebeelde vuilnisbaksymbool).
U kunt verbruikte batterijen/accu’s gratis afgeven bij het KCA, onze lialen of overal waar batterijen/accu’s worden
verkocht.
Zo voldoet u aan de wettelijke verplichtingen en draagt u bij aan de bescherming van het milieu.
24. Conformiteitsverklaring (DOC)
Hiermee verklaart Conrad Electronic SE, Klaus-Conrad-Straße 1, D-92240 Hirschau dat het product voldoet aan
richtlijn 2014/53/EU.
De volledige tekst van de EU-conformiteitsverklaring is als download via het volgende internetadres be-
schikbaar:
www.conrad.com/downloads
Kies een taal door op een vlagsymbool te klikken en voer het bestelnummer van het product in het zoek-
veld in; daarna kunt u de EU-conformiteitsverklaring in pdf-formaat downloaden.
38
Page 39

25. Verhelpen van storingen
Het model en de afstandsbediening werden volgens de nieuwste technische inzichten vervaardigd. Er kunnen desondanks problemen of storingen optreden. Om deze reden kunnen wij u tonen hoe u eventuele storingen kunt verhelpen.
Probleem Oplossing
De zender reageert niet, de led brandt niet. • Controleer de batterijen van de zender.
• Controleer de polariteit van de batterijen in de zender.
• Aan-/uitschakelaar controleren.
Led in de zender knippert. • Batterijen in de zender controleren of vervangen.
• Voer de inschakelprocedure van de quadcopter opnieuw uit.
Quadcopter kan niet worden ingeschakeld.
De led in de quadcopter brandt niet.
Propellers starten niet op. • Laadtoestand van de vluchtaccu controleren.
De quadcopter kantelt om bij het starten. • Voer de inschakelprocedure van de quadcopter opnieuw uit en
De quadcopter trilt sterk bij het vliegen. • Propellers draaien niet rond.
De quadcopter heeft te weinig vermogen of
te korte vliegtijden.
De quadcopter vliegt voortdurend in één
richting.
Quadcopter reageert zeer traag op de
besturingsopdrachten.
De quadcopter kan niet met de smartphone
worden gekoppeld.
Camerabeeld niet zichtbaar op de smartphone.
• Controleer of de vluchtaccu juist is geplaatst.
• Vluchtaccu om testdoeleinden nog eenmaal opladen.
• Houd de toets op de quadcopter min. 1 sec ingedrukt.
• Vluchtaccu om testdoeleinden nog eenmaal opladen.
• Inschakelprocedure herhalen.
beweeg het model daarbij niet.
• Licht lopen van de aandrijfmotoren controleren.
• Kalibratie van de positiesensors uitvoeren.
• Propellers zijn beschadigd of vervormd.
• Laadtoestand van de vluchtaccu controleren.
• Vluchtaccu vervangen.
• Ongunstige omstandigheden voor vliegen (wind of tocht).
• Kalibratie van de positiesensors uitvoeren.
• Omschakelen naar sport- of expertmodus.
• Verkeerde quadcopter in het startmenu geselecteerd.
• Geen WLAN-verbinding tot stand gebracht.
• Storing of niet tot stand gebrachte WLAN-verbinding.
• Storing door andere WLAN-apparatuur.
39
Page 40

26. Technische gegevens
a) Zender
Frequentiebereik ...............................................2,450 - 2,478 GHz
Zendvermogen .................................................9 dBm
Stuurkanalen ....................................................4
Zendbereik ........................................................ong. 30 - 50 m
Bedrijfsspanning ...............................................3,0 V/DC via 2 batterijen van type micro/AAA
Afmetingen (l x b x h) ........................................112 x 37 x 55 mm
Gewicht zonder batterijen .................................47 g
b) Quadcopter
FPV-frequentiebereik ........................................2,402 - 2,422 GHz
Zendvermogen .................................................15 ±2 dBm
Zendbereik ........................................................ong. 30 m
Stroomvoorziening ............................................3,7 V/500 mAh (1S LiPo, 15C)
Afmetingen .......................................................158 x 180 x 27 mm (incl. beschermbeugel)
Ingeklapt: 158 x 103 x 50 mm
Diameter propeller ............................................68 mm
Opstijggewicht incl. accu ..................................86 g
c) Camera
Videoresolutie ...................................................1280 x 720 pixels bij 20 beelden/sec
Beeldresolutie ...................................................1280 x 720 pixels
Verstelbare kantelhoek .....................................15° - 45°
d) USB-oplader
Bedrijfsspanning ...............................................5 V/DC (via USB)
Stroomverbruik ................................................max. 500 mA
Oplaadduur .......................................................45 - 60 min
e) Software/app
Android .............................................................vanaf Android 4.0
iOS ....................................................................vanaf iOS 8.0
40
Page 41

414243
Page 42

Page 43

Page 44

Dit is een publicatie van Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Alle rechten, vertaling inbegrepen, voorbehouden. Reproducties van welke aard dan ook, bijvoorbeeld fotokopie,
microverlming of de registratie in elektronische gegevensverwerkingsapparatuur, vereisen de schriftelijke toestemming van
de uitgever. Nadruk, ook van uittreksels, verboden. De publicatie voldoet aan de technische stand bij het in druk bezorgen.
Copyright 2018 by Conrad Electronic SE.
1697439_V1_1018_02_VTP_m_nl
 Loading...
Loading...