

RCA 21T18 M28, 14F512T Diagram

SERVICE MANUAL M28˄SUPER ONE CHIP˅
TCL OVERSEAS HOLDINGS LIMITED Service Manual
1
2
Service Manual TCL OVERSEAS HOLDINGS LIMITED
CONTENTS
I. Servicing Precautions…………………………………………………3
II. Product Specification…………………………………………………4
III. Brief Introduction On Chassis………………………………………...6
IV. IC Pin Description…………………………………………………....10
V. Adjusting Description………………………………………………...39
VI. Troubleshooting………………………………………………………46
VII. PCB Layout Diagram………………………………………………...58
VIII. Schematic Circuit Diagram…………………………………………..60
IX. Exploded View……………………………………………………….61
X. Spare Parts List………………………………………………………62
XI. Safety & EMC Components…………………………………………74
XII. Change Record………………………………………………………75
* FOR INFORMATION ONLY

Service Manual
3
SERVICE MANUAL FOR M28 ONE-CHIP CHASSIS
PART I. Servicing Precautions
When working, the unit is with high voltage about 25KV inside. So, to avoid the risk of electric shock,
be careful to adjust the chassis!
1. Only qualified personnel should perform service procedures.
2. All specification must be met over line voltage ranger of 110V AC to 240V AC 50Hz/60Hz.
3. Do not operate in WET/DAMP conditions.
4. Portions of the power supply board are hot ground. The remaining boards are cold ground.
5. Discharge of CRT anode should be done only to CRT ground strap.
6. When fuse blow, ensure to replace a fuse with the same type and specification.
7. Keep the wires away from the components with high temperature or high voltage.
8. When replacing the resister with high power, keep it over the PCB about 10mm.
9. The CRT anode high voltage has been adjusted and set in the factory. When repairing the chassis,
do not make the high voltage exceed 27.5KV (The beam current is 0uA). Generally, the high voltage
is set on 25.5KV±1.5KV (The beam current is 700uA).
* The values of parameters above are for information only.
10. Before return the fixed unit, do check all the covering of wires to ensure that not fold or not short
with any metal components. Check the entire protection units, such as control knobs, rear cabinet &
front panel, insulation resister & capacitor, mechanical insulators and so on.
11. There are some mechanical and electrical parts associating with safety (EMC) features (Generally
related to high voltage or high temperature or electric shock), these features cannot be found out from
the outside. When replace these components, perhaps the voltage and power suit the requirements, but
efficient X-ray protection may not be provided. All these components are marked with Ì in the
schematic diagram. When replace these, you’d better look up the components listed in this manual. If
the component you replaced not has the same safety (EMC) performance, harmful X-ray may be
produced.

4
Service Manual
PART II -Product Specification
1. Ambient Conditions:
1.1 Ambient Temperatures:
a. Operating: -10 ~ +40ćć
b. Storage: -15 ~ +45ćć
1.2 Humidity
a. Operation: <80%
b. Storage: <90%
1.3 Air Pressure: 86kpa ~ 106kpa
2. GENERAL SPECIFICATION
2.1 MPU & Chroma IC: TMPA8803CSN (One-Chip)
2.2 TV Broadcasting System
PAL DK/BG
SECAM DK/BG
NTSC 3.579/4.43 AV MODE
2.3 Scanning Lines & Frequencies
525/625 lines
15.625KHz/15.75KHz
50/60Hz
2.4 Color Sub-Carrier: 4.433MHz/3.579MHz
2.5 IF: Picture 38.9MHz Sound 5.5/6.5MHz
2.6 Power Consumption: 80W
2.7 Power Supply: AC 220V 50Hz±10%
2.8 Audio Output Power (7%THD): 4W + 4W
2.9 Aerial Input Impedance: 75 Unbalanced Din Jack Ant.Input
2.10 Product Safety Requirement: VDE Approval
2.11 Product EMC/EMI Requirement: FTZ Approval
3. Basic Features of Controller
3.1 Channel Tuning Method: Voltage Synthesizer

Service Manual
3.2 Presettable Program: 100 Programs
3.3 Tuning for VHF and UHF Bands: Auto/Manual/Fine Tuning
3.4 Picture and Sound Adjustment
Bright, Contrast, Color and Volume Control
TINT Control (NTSC)
Sharpness Control
3.5 OSD
General Features (Volume, Brightness, Contrast, Color, Program, Band, Auto Search, Manual,
Tune, Muting, AV and Sleep Timer)
NICAM and Dual Language
German Stereo Indicator
3.6 Sleep Timer: 10-120 Minutes with 10Min.Increment
5
3.7 Auto Off When No Broadcasting Signal: 15 min
3.8 Full Function Infrared Remote Control
3.9 Remote Effective Distance: 8m
4. Construction of Front Panel
Main Power Switch
Remote Sensor
Standby Indicator
Menu Select
TV/AV Select
Program and Volume Up/Down
5. Construction of Real Panel
75 Aerial Terminal
RCA Socket –Audio-R+L In/Out, Video- In/Out
Y/U/V Input
6. Other Information
6.1 Colour Temperature: 9300K X=284 Y=299
6.2 Magnetic Field: Bv=0.2~0.5Gs
6
Service Manual TCL OVERSEAS HOLDINGS LIMITED
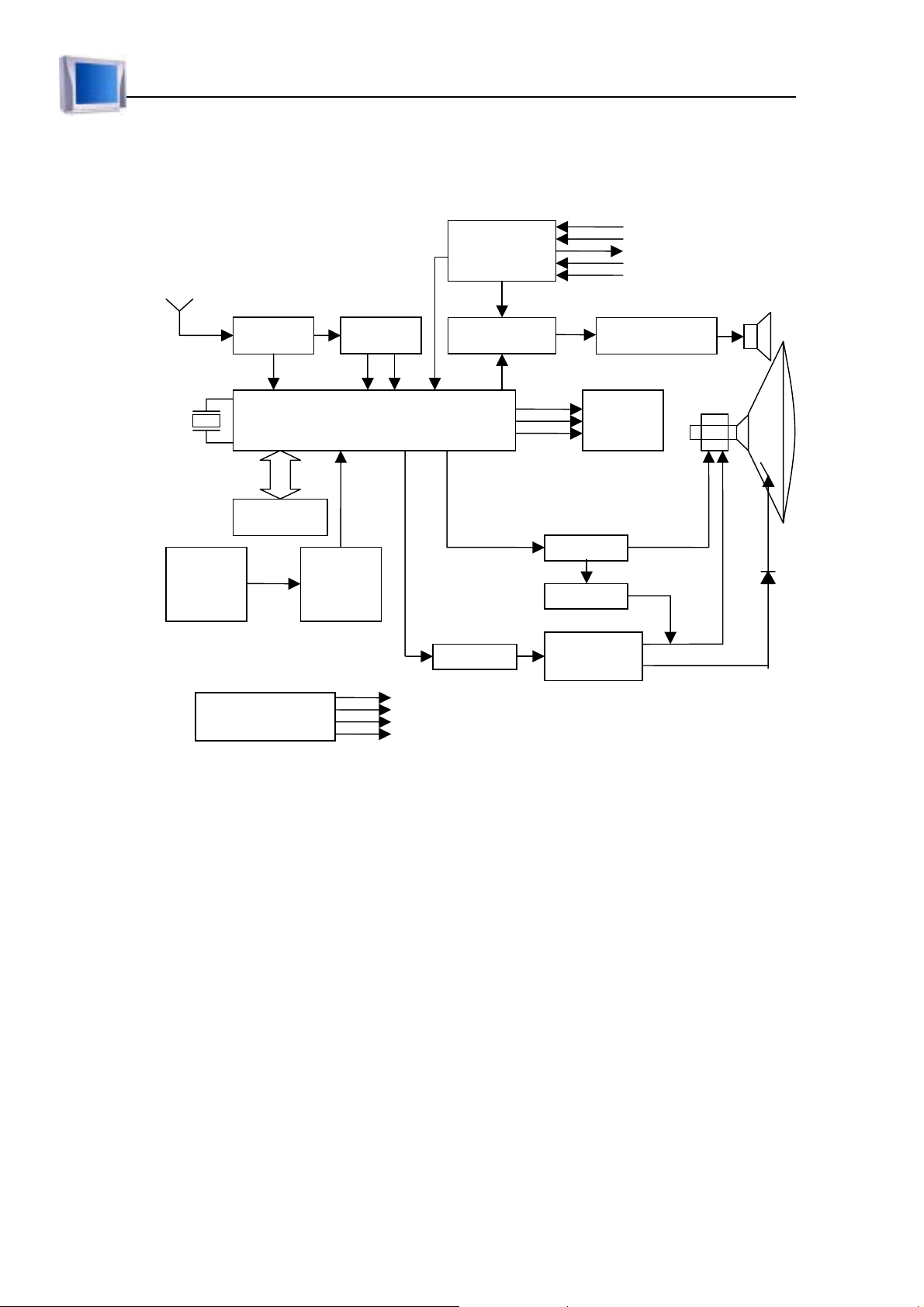
PART III. Brief Introduction on Chassis
AV I NPUT/
OUTPUT
RF IN
XTAL
OSC
INFRARED
REMOTE
CONTROL
TUNER SAW
TMPA8803CPN(M28)
I2C BUS
E2PROM
REMOTE
CONTROL
RECEIVER
SWITCH POWER
MC44608
NICAM BD
H DRIVE
R/G/B
V OUTPUT
DPC
H OUTPUT
AUDIO AMP
CRT
DRIVE
FBT
The TV signal is amplified by the frequency mixing circuit of the tuner. Then the tuner output PIF and
SIF signals. The IF signals are amplified about 20dB by the pre IF amplifier (Q101). Having passed
the SAW, the IF signals go into the TMP8803CPN from pin ƻ
42
, ƻ41. The IF signal pass the video
detect circuit to generate CVBS signal. Then the processor deals the signal with luminance and
chroma separation. The processor deals the luminance signal with Y-Delay, Y-Gamma correction, Y-hf
compensation and black strength, all which ensure that there are enough bandwidth and gain with Y
signal, so that the resolution of picture detail is improved and the Y signal is well timed with chroma
signal. The processor also deals the chroma signal with chroma sub-carrier recovery, color system
recognition and color signal decoding, then outputs B-Y and R-Y color difference signal. A matrix
circuit converts the color difference signal (Y, B-Y and R-Y) into primary color signal (R/G/B). On the
other hand, the processor separated the horizontal and vertical sync signal from the CVBS signal
which was generated by video detect circuit. Having passed the horizontal (or vertical) frequency
dividing circuit, the H (or V) OSC signal, which be generated by H-AFC (or V-AFC), is changed to H
(or V) drive signal. The H/V drive signal make the horizontal/vertical circuits and scan output circuit
to generate H/V saw tooth wave

TCL OVERSEAS HOLDINGS LIMITED Service Manual
1.Channel Section
The RF signal is converted into IF signal by the tuner. Then the IF signal cross the IF amplifier circuit
(pre IF amplifier) to get a gain about 15dB. By the coupling capacitance (c110) and the match
resistance (R114 56), the input resistance of the pre-IF amplifier match with the tuner. The signals
pass a parallel connection circuit with voltage NFB, which combines the advantages of low output
impedance, of wide dynamic range and of less components. R116 is a voltage NFB component, which
is used to adjust the gain in the pass band. Having been amplified by the IF amplifier, the IF signal
pass a SAW, and then come into TMPA8803CSN from pin41 and pin42 with balance. The processor
deal the IF signal with IF detection, PLL demodulation, IF AGC, AFC, video peak detection, and color
system recognition etc., then output a AGC signal from pin 43 to the tuner to adjust the input
amplitude of IF signal. R217, C218 and C219 make up of picture IF PLL circuit, which is used to
control IF detection. IC201 output a sound IF signal from pin 31 and a video signal, which will be
amplified by Q209, from pin30. The processor output a sound system control signal to Q208. If the
processor output a high level from pin59 (sound detection), Q208 is on, and a video signal is separated
from the IF signal by a trap. With capacitance coupling, the video signal comes into IC201 from pin26,
and then it is selected by inner switches and output from pin45. Having come out, the video signal will
be amplified by Q210, and a sync signal will be separated by a sync separate circuit which is made up
by C208, Q202 and Q203. Then the video come into inner 870X CPU module from IC201 pin62 to
detect whether the signal is live signal.
7
Tuning control and band switch control circuits
The processor output a tuning control signal from pin60. The control signal will pass Q103 common
emitter amplifying circuit, then an integrating circuit. Finally, it is added to the VT terminal to provide
all channels’ tuning voltage for the tuner to stabilize the channels.
2.Vertical Output Section
TMPA8803CSN outputs vertical saw-tooth wave from pin 16. It come to pin5 of LA7840 with DC
coupling, and is amplified by inner difference amplifier. Pin4 of LA7840 is the same phase input
terminal. R307 and R308 are DC offset resistances. C305 is a filter capacitor. In application to M28,
pin4 of la7840 is fixed as the DC amplify ref terminal. The amplified saw tooth wave come out la7840
from pin2 and make the deflect coil to generate the deflect current. R314 and C301 filtrate the
inductive interference from the horizontal deflect coil. R317 and C309 are used to eliminate spurious
oscillation generated by the deflect coil and distributed capacitance resonance. C308, R313, C307 and
accessory circuit are in charge of draw AC saw tooth wave out at the deflect coil terminal connected
with R315 & R316, and feedback to the input terminal of la7840 (pin5) to correct the linearity of
horizontal scan. C306 is a high frequency decoupling capacitor. D301 and C303 make up of a voltage
pump up circuit. La7840 output a vertical kickback impulse from pin7 to locate the OSD characters.
3.Horizontal Output Section
The processor outputs horizontal drive impulse from pin 13. The drive impulse is done with voltage
division by R238 and R401, and then comes to the base of the drive triode (Q401). C401 is used to
eliminate the noise in the H drive impulse. T401 is a horizontal drive transformer. Q402 is a horizontal
output triode with a damper inside. L402 is connected with the emitter of the horizontal output diode
to eliminate the radiation and to improve the distortions at the cross of vertical and horizontal white

8
Service Manual TCL OVERSEAS HOLDINGS LIMITED
lines. C406 and C402 are retrace capacitors and C421 is an s-correct capacitor. L441 and L442 are
horizontal linear inductors. R441 is used to eliminate the parasitic oscillation caused by horizontal
linear inductors. C420, R413 and D411 are used to correct the M-distortion in horizontal direction.
C422, R415 and R415A are coupling components for the horizontal retrace impulse, which are feed
back to pin 12 of TMPA8803CSN. D404 is a negative peak-killer diode.
Horizontal scanning distortion and the method to compensate it
The deflect coil and the horizontal output triode have some resistance R while they are ducting. The
resistance R will cause the non-linear distortion, which means that the right direction scanning speed
of the electron beam becomes slower, and the right of the raster is compressed to generate distortion.
We use a horizontal linear adjuster to compensate this kind of distortion. We use L412 and L411 as the
H linear adjusters in H scanning section of M28 chassis. R411, which is parallel connected with L411
and L412, is a despiking resistance for preventing the oscillation by compensating inductor and the
stray capacitance. The lin ear adjuster is a transductor coi l with a magnetic core inside. If the curren t,
which pass the linear adjuster coil, increase to a certain value, the magnetic core becomes saturated to
decrease the inductance of the linear adjustment inductor. If the +B is steady, the increase speed of Iy
is faster to compensate the reducing of deflecting current by the resistance R mention above.
We can adjust the magnetic core to chang the inductance of the linear compensate inductor to adjust
the H linearity.
The EHT generation circuit
The FBT supply the anode high voltage, focus voltage and screen voltage for M28 chassis. D401 and
C408 are in charge of regulating the primary impulse of the transformer to output a voltage of 190V
for the video amplifiers. The ( 10 ) ~ ( 8 ) coils of the FBT supply the heater with power. Having
passed the divider and clipping circuits, whi ch are maded up by R415, R415A, C422 and D404, the
H retrace impulses getting out from ( 3 ) ~ ( 10 ) coils are inputed to pin12 of TMPA8803CSN to
generate sand castle impulse.
To limit the beam current in a safe range, we add a ABL circuit in M28 chassis. We add two sampling
resistances (R414, R415) between +24V power supply and pin7 of the FBT. The voltage at the joint of
the two resistances is feed back to pin27 of TMPA8803CSN to control bright and contrast to limit the
beam current. It is also in charge of regulating EHT. C410 is a fliter capacitor for ABL voltage.
The impulses, which are induced by secondary coil 5, are changed to 12V once passed the regulating
and fliting circuit made up by D402 and C413. IC401 change 12V power supply to 9V for many
circuits, such as R/G/B output circuit of TMPA8803CSN, IC4053, pre IF-amplifier circuit, bright dots
killer circuit and S terminal circuit. IC402 outputs a 5V power supply for the keyboard circuit. C418,
C417, C423 and C425 are fliter capacitors. D402 and C413 are incharge of regulating and flitering for
the output of coil6 to supply the V scanning output section with 24V power. The 24V is added to the
upper terminal of the V deflecting yoke as the DC bias for the movement of V center.
Extension distortion and compensation
This kind of distortion is mainly caused by the structure of CRT. Due to the srcreen of SF CRT is not a
ture flat screen, the distances from the deflecting center to the screen are not the same. The scanning
speed of the electron beam is uniform. If the electron beam scannning the screen equally with the

TCL OVERSEAS HOLDINGS LIMITED Service Manual
effect of ture linear sawtooth current, the E-W sides of the picture are stretched. That is the extension
distortion. Usually, we add a S-correct capacitor in series with the deflecting coil to compensate this
kind of distortion. The integral character of S-correct capacitor make the current waveform S shape.
So the scanning speed of electron beam at the center of screen is faster than the one at the side. So this
action can correct the extension distortion. C421 is a S-correct capacitor. The capacitance is inverse
ratio with the correcting effect.
9
10
Service Manual TCL OVERSEAS HOLDINGS LIMITED
PART IV. IC Pin Description
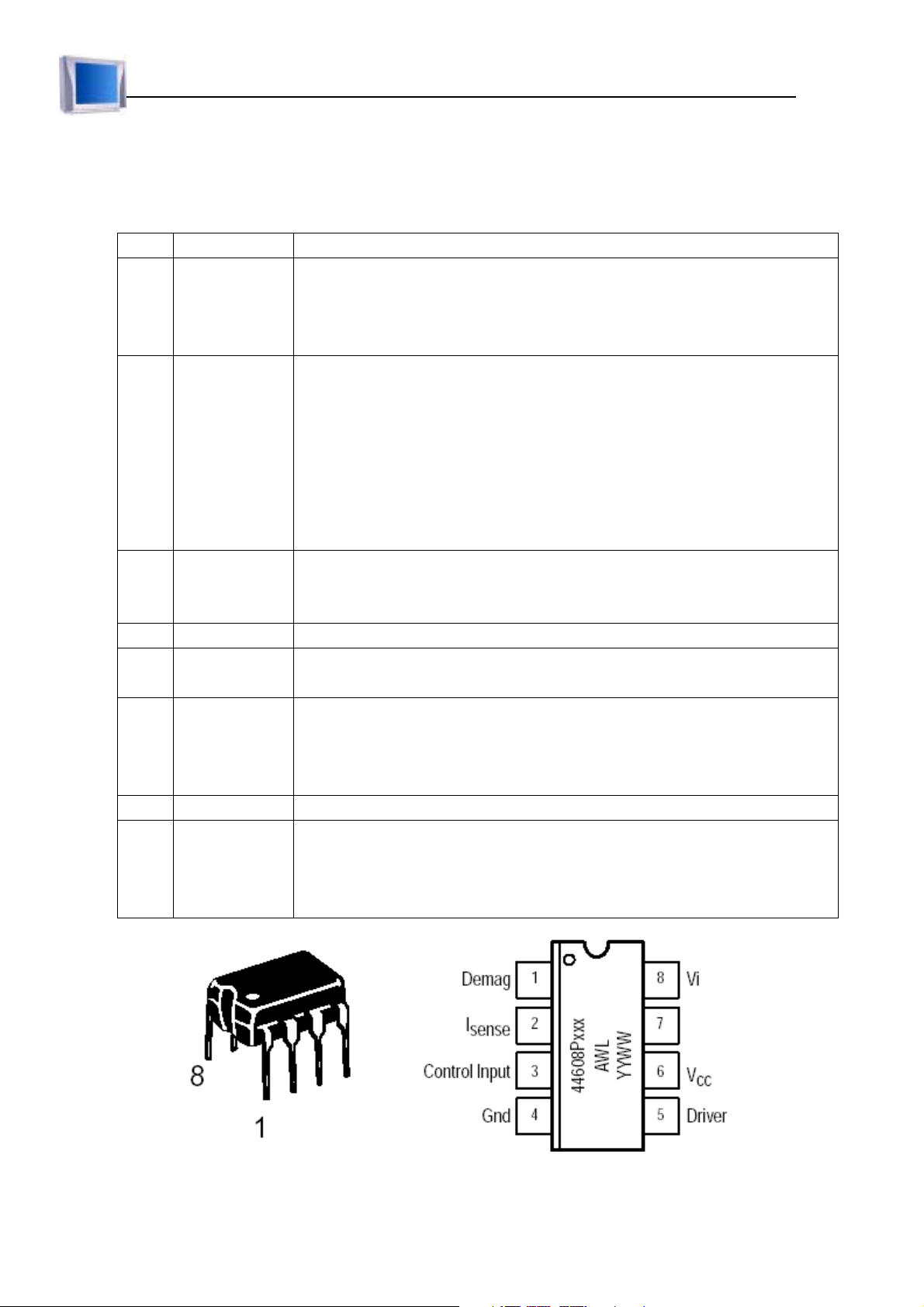
1. MC44608-High Voltage PWM Controller
Pin Name Description
The Demag pin offers 3 different functions: Zero voltage crossing detection
1 Demag
I
2
3
sense
Control Input
4 Ground This pin is the ground of the primary side of the SMPS.
5Driver
V
6
CC
7 This pin is to provide isolation between the Vi pin 8 and the VCC pin 6.
8V
i
(50mV), 24 A current detectionǂ and 120 A current detection. The 24 Aǂǂ
level is used to detect the secondary reconfiguration status and the 120 A level ǂ
to detect an Over Voltage status called Quick OVP.
The Current Sense pin senses the voltage developed on the series resistor
inserted in the source of the power MOSFET. When Isense reaches 1V, the
Driver output (pin 5) is disabled. This is known as the Over Current Protection
function. A 200 A current source is flowing out of the pin 3 during theǂ
start–up phase and during the switching phase in case of the Pulsed Mode of
operation. A resistor can be inserted between the sense resistor and the pin 3,
thus a programmable peak current detection can be performed during the SMPS
stand–by mode.
A feedback current from the secondary side of the SMPS via the opto–coupler is
injected into this pin. A resistor can be connected between this pin and GND to
allow the programming of the Burst duty cycle during the Stand–by mode.
The current and slew rate capability of this pin are suited to drive Power
MOSFETs.
This pin is the positive supply of the IC. The driver output gets disabled when
the voltage becomes higher than 15V and the operating range is between 6.6V
and 13V. An intermediate voltage level of 10V creates a disabling condition
called Latched Off phase.
This pin can be directly connected to a 500V voltage source for start–up
function of the IC. During the Start–up phase a 9 mA current source is internally
delivered to the VCC pin 6 allowing a rapid charge of the VCC capacitor. As
soon as the IC starts–up, this current source is disabled.
TCL OVERSEAS HOLDINGS LIMITED Service Manual
OPERATING DESCRIPTION
11
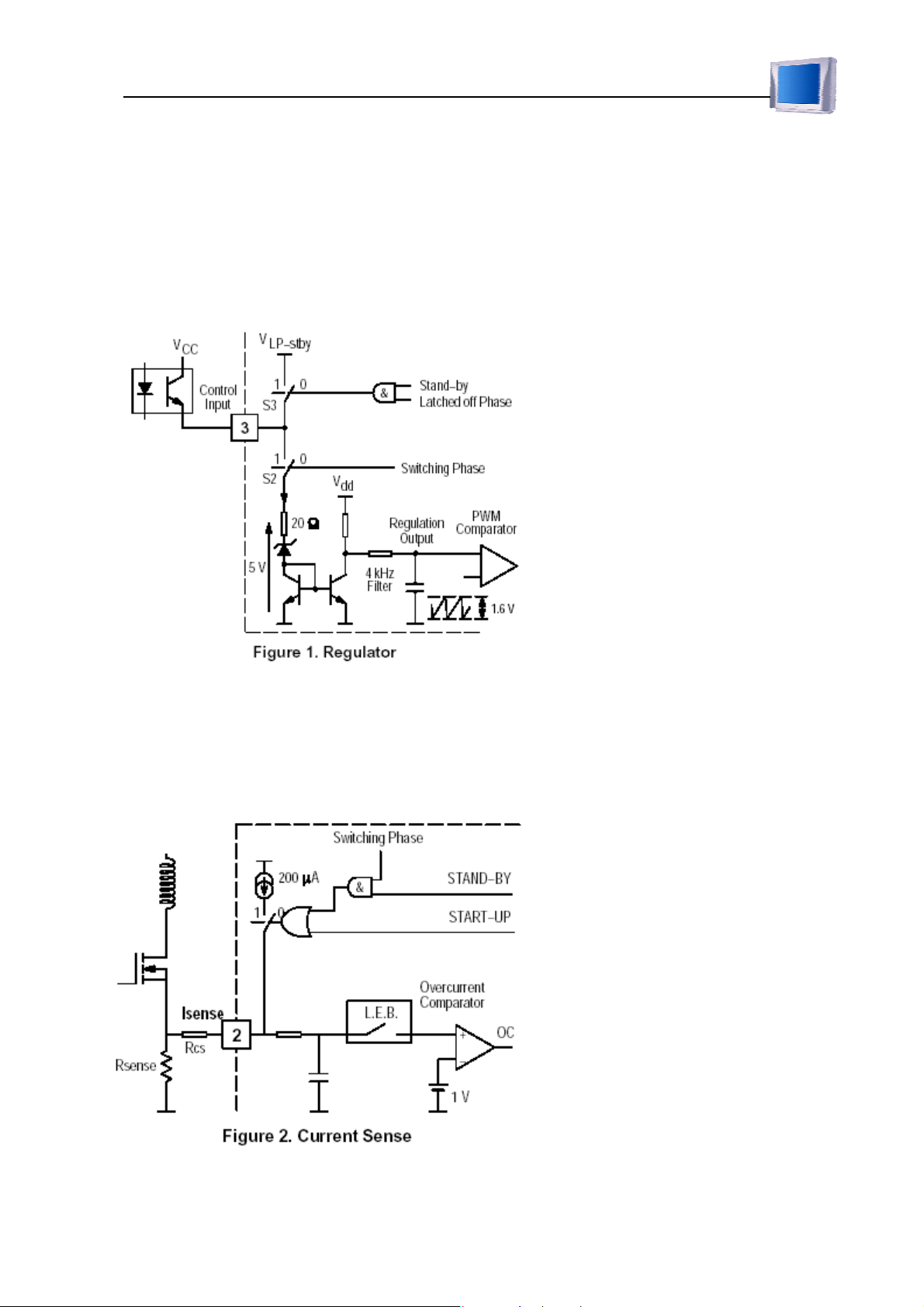
Regulation
The pin 3 senses the feedback current provided by the opto-coupler. During the switching phase the
switch S2 is closed and the shunt regulator is accessible by the pin 3. The shunt regulator voltage is
typically 5V. The dynamic resistance of the shunt regulator represented by the zener diode is 20:.
The gain of the Control input is given on Figure 10 which shows the duty cycle as a function of the
current injected into the pin 3.
A 4KHz filter network is inserted
between the shunt regulator and the
PWM comparator to cancel the high
frequency residual noise.
The switch S3 is closed in Stand–by
mode during the Latched Off Phase
while the switch S2 remains open. (See
section PULSED MODE DUTY
CYCLE CONTROL).
The resistor Rdpulsed (Rduty cycle
burst) has no effect on the regulation
process. This resistor is used to
determine the burst duty cycle described in the chapter “Pulsed Duty Cycle Control” on page 8.
PWM Latch
The MC44608 works in voltage mode. The on–time is controlled by the PWM comparator that
compares the oscillator sawtooth with the regulation block output.
The PWM latch is initialized by the
oscillator and is reset by the PWM
comparator or by the current sense
comparator in case of an over current.
This configuration ensures that only a
single pulse appears at the circuit
output during an oscillator cycle.
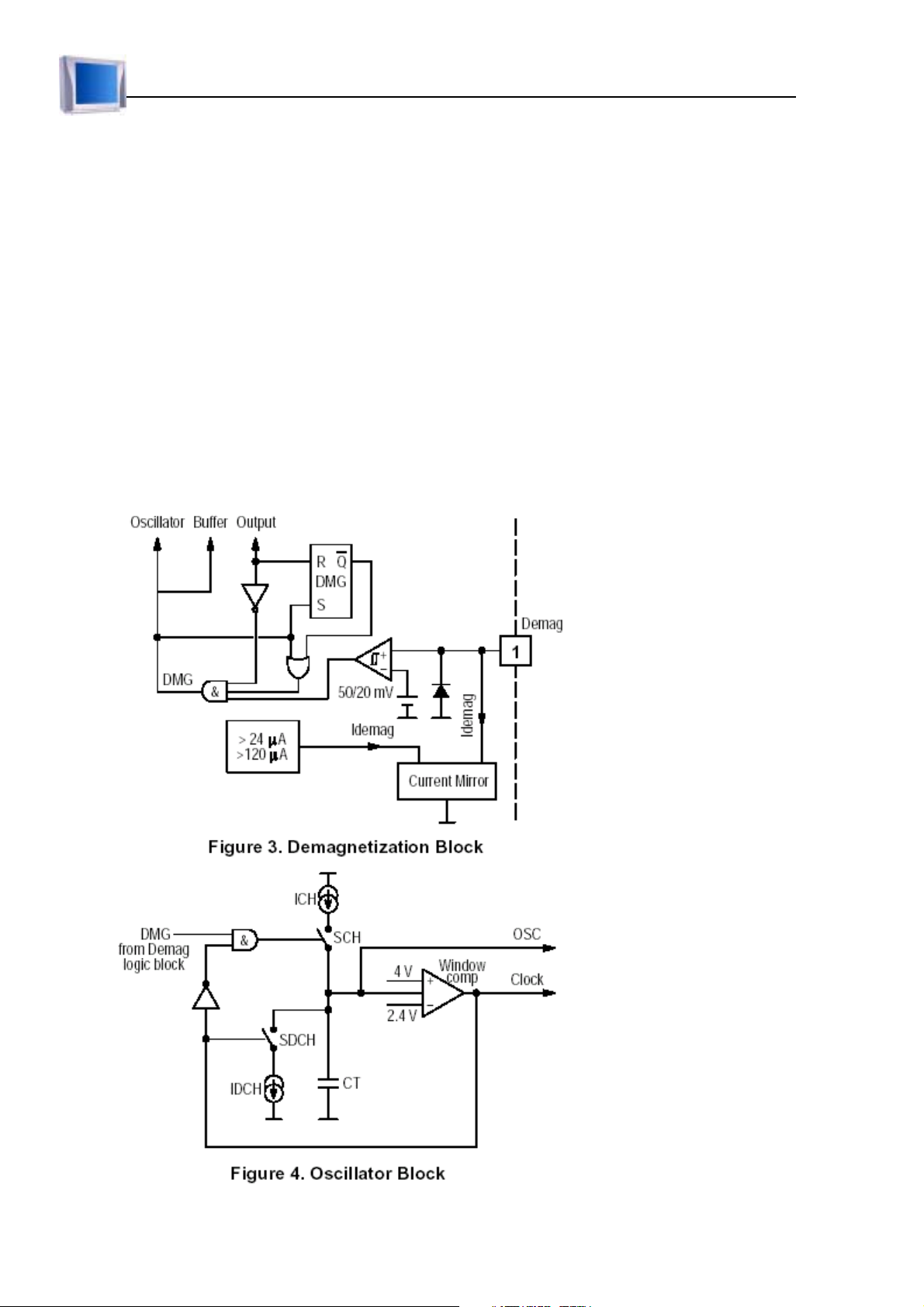
Current Sense
The inductor current is converted to a
positive voltage by inserting a ground
reference sense resistor R
Sense
in series
with the power switch.
The maximum current sense threshold is fixed at 1V. The peak
current is given by the following
12
Service Manual TCL OVERSEAS HOLDINGS LIMITED
equation:
Ipk
max
= 1/R
(:) (A)
sense
In stand–by mode, this current can be lowered as due to the activation of a 200PA current source:
Ipk
MAX-STBY
The current sense input consists of a filter (6k:, 4pF) and of a leading edge blanking. Thanks to that,
this pin is not sensitive to the power switch turn on noise and spikes and practically in most
applications, no filtering network is required to sense the current.
Finally, this pin is used:
– as a protection against over currents (I
sense
> I)
– as a reduction of the peak current during a Pulsed Mode switching phase.
The overcurrent propagation delay is reduced by producing a sharp output turn off (high slew rate).
This results in an abrupt output turn off in the event of an over current and in the majority of the
pulsed mode switching sequence.
Demagnetization Section
The MC44608 demagnetization
detection consists of a
comparator designed to compare
the V
winding voltage to a
CC
reference that is typically equal
to 50mV.
This reference is chosen low to
increase effectiveness of the
demagnetization detection even
during start–up.
A latch is incorporated to turn
the demagnetization block
output into a low level as soon
as a voltage less than 50 mV is
detected, and to keep it in this
state until a new pulse is
generated on the output. This
avoids any ringing on the input
signal which may alter the
demagnetization detection.
For a higher safety, the
demagnetization block output is
also directly connected to the
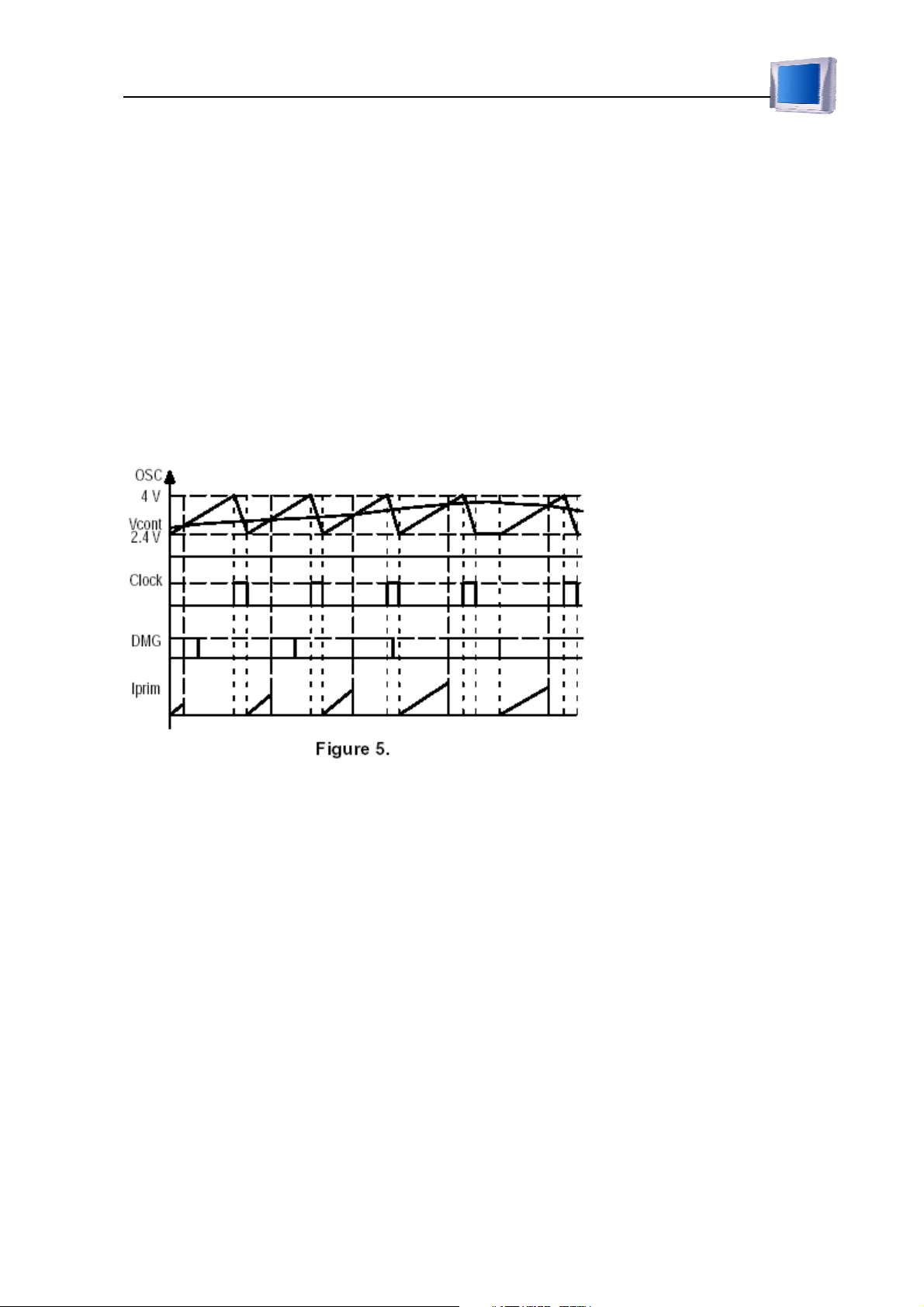
TCL OVERSEAS HOLDINGS LIMITED Service Manual
13
output, which is disabled during the demagnetization phase.
The demagnetization pin is also used for the quick, programmable OVP. In fact, the demagnetization
input current is sensed so that the circuit output is latched off when this current is detected as higher
than 120PA.
This function can be inhibited by grounding it but in this case, the quick and programmable OVP is
also disabled.
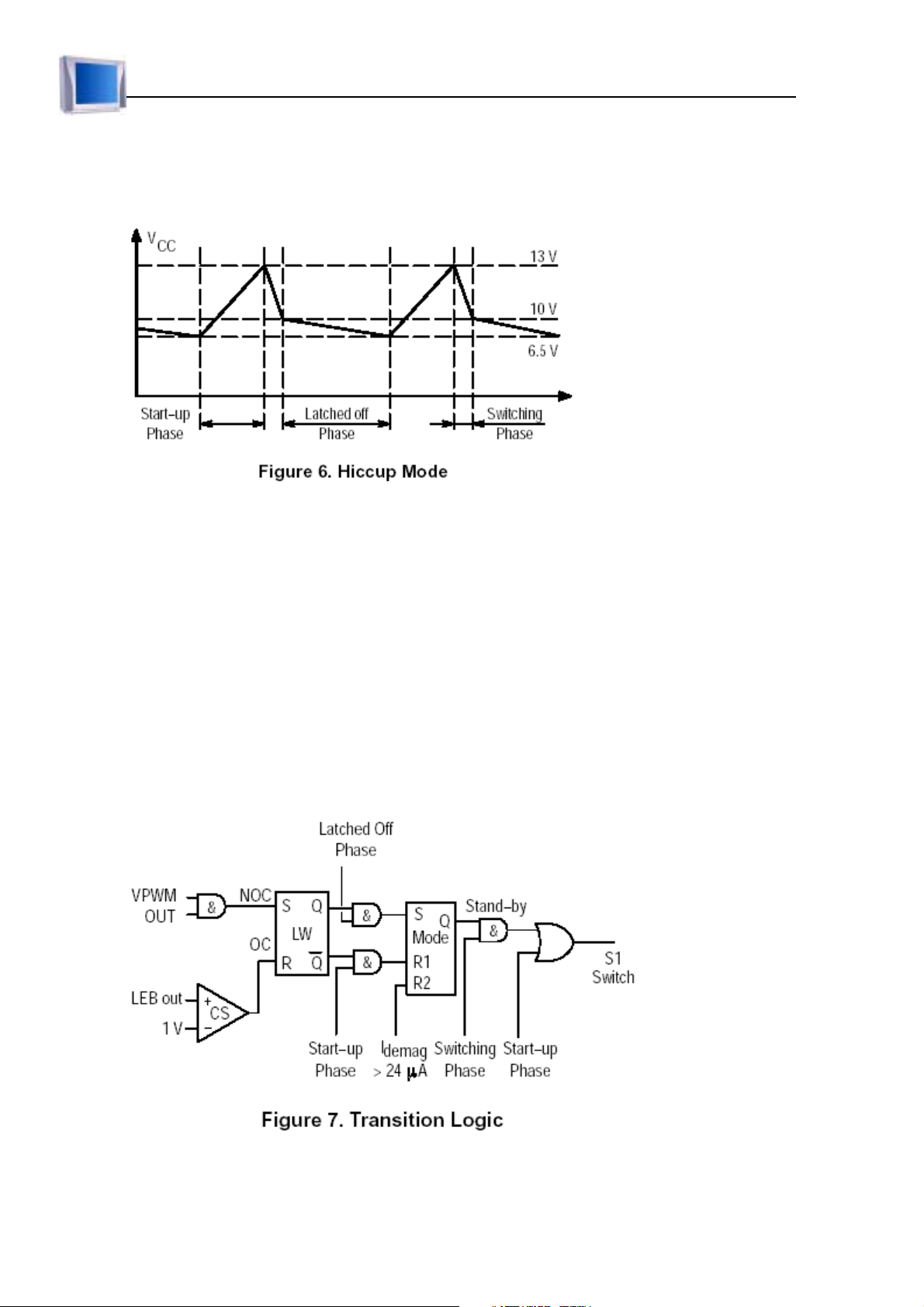
Oscillator
The MC44608 contains a fixed frequency oscillator. It is built around a fixed value capacitor CT
succesively charged and discharged by two distinct current sources ICH and IDCH. The window
comparator senses the CT voltage value and activates the sources when the voltage is reaching the
2.4V/4V levels.
The complete
demagnetization status
DMG is used to inhibit the
recharge of the CT capacitor.
Thus in case of incomplete
transformer demagnetization
the next switching cycle is
postpone until the DMG
signal appears. The
oscillator remains at 2.4V
corresponding to the
sawtooth valley voltage. In
this way the SMPS is
working in the so called SOPS mode (Self Oscillating Power Supply). In that case the effective
switching frequency is variable and no longer depends on the oscillator timing but on the external
working conditions (Refer to DMG signal in the Figure 5).
The OSC and Clock signals are provided according to the Figure 5. The Clock signals correspond to
the CT capacitor discharge. The bottom curve represents the current flowing in the sense resistor Rcs.
It starts from zero and stops when the sawtooth value is equal to the control voltage Vcont. In this way
the SMPS is regulated with a voltage mode control.
Overvoltage Protection
The MC44608 offers two OVP functions:
– a fixed function that detects when V
is higher than 15.4V
CC
– a programmable function that uses the demag pin. The current flowing into the demag pin is
mirrored and compared to the reference current Iovp (120PA). Thus this OVP is quicker as it is not
impacted by the V
inertia and is called QOVP.
CC
In both cases, once an OVP condition is detected, the output is latched off until a new circuit
14
Service Manual TCL OVERSEAS HOLDINGS LIMITED
START–UP.
Start–up Management
The Vi pin 8 is directly connected to the HV DC rail Vin. This high voltage current source is
internally connected to the
pin and thus is used to
V
CC
charge the V
capacitor. The
CC
VCC capacitor charge period
corresponds to the Start–up
phase. When the V
voltage
CC
reaches 13V, the high voltage
9mA current source is
disabled and the device starts
working. The device enters
into the switching phase.
It is to be noticed that the maximum rating of the Vi pin 8 is 700V. ESD protection circuitry is not
currently added to this pin due to size limitations and technology constraints. Protection is limited by
the drain–substrate junction in avalanche breakdown. To help increase the application safety against
high voltage spike on that pin it is possible to insert a small wattage 1k: series resistor between the
Vin rail and pin 8.
The Figure 6 shows the V
into the V
pin during the switching phase. This case can be encountered in SMPS when the self
CC
voltage evolution in case of no external current source providing current
CC
supply through an auxiliary winding is not present (strong overload on the SMPS output for example).
The Figure 16 also depicts this working configuration.
In case of the hiccup mode, the duty cycle of the switching phase is in the range of 10%.
Mode Transition
The LW latch Figure
7 is the memory of
the working status at
the end of every
switching sequence.
Two different cases
must be considered
for the logic at the
termination of the
SWITCHING
PHASE:
1. No Over Current
was observed

TCL OVERSEAS HOLDINGS LIMITED Service Manual
15
2. An Over Current was observed
These 2 cases are corresponding to the signal labeled NOC in case of “No Over Current” and “OC” in
case of Over Current. So the effective working status at the end of the ON time memorized in LW
corresponds to Q=1 for no over current and Q=0 for over current.
This sequence is repeated during the Switching phase.
Several events can occur:
1. SMPS switch OFF
2. SMPS output overload
3. Transition from Normal to Pulsed Mode
4. Transition from Pulsed Mode to Normal Mode
1. SMPS SWITCH OFF
When the mains is switched OFF, so long as the bulk electrolithic bulk capacitor provides energy to
the SMPS, the controller remains in the switching phase. Then the peak current reaches its maximum
peak value, the switching frequency decreases and all the secondary voltages are reduced. The V
CC
voltage is also reduced. When VCC is equal to 10V, the SMPS stops working.
2. Overload
In the hiccup mode the 3 distinct phases are described as follows (refer to Figure 6):
The SWITCHING PHASE: The SMPS output is low and the regulation block reacts by increasing the
ON time (dmax = 80%). The OC is reached at the end of every switching cycle. The LW latch (Figure
7) is reset before the VPWM signal appears. The SMPS output voltage is low. The V
voltage cannot
CC
be maintained at a normal level as the auxiliary winding provides a voltage which is also reduced in a
ratio similar to the one on the output (i.e. Vout nominal / Vout short–circuit). Consequently the V
CC
voltage is reduced at an operating rate given by the combination VCC capacitor value together with the
I
working consumption (3.2mA) according to the equation 2. When VCC crosses 10V the
CC
WORKING PHASE gets terminated. The LW latch remains in the reset status.
The LATCHED–OFF PHASE: The V
capacitor voltage continues to drop. When it reaches 6.5V
CC
this phase is terminated. Its duration is governed by equation 3.
The START–UP PHASE is reinitiated. The high voltage start–up current source (–I
activated and the MODE latch is reset. The V
voltage ramps up according to the equation 1. When it
CC
= 9mA) is
CC1
reaches 13V, the IC enters into the SWITCHING PHASE.
The NEXT SWITCHING PHASE: The high voltage current source is inhibited, the MODE latch
(Q=0) activates the NORMAL mode of operation. Figure 2 shows that no current is injected out pin 2.
The over current sense level corresponds to 1V.
As long as the overload is present, this sequence repeats. The SWITCHING PHASE duty cycle is in
the range of 10%.

16
Service Manual TCL OVERSEAS HOLDINGS LIMITED
3. Transition from Normal to Pulsed Mode
In this sequence the secondary side is reconfigured (refer to the typical application schematic on page
13). The high voltage output value becomes lower than the NORMAL mode regulated value. The
TL431 shunt regulator is fully OFF. In the SMPS stand–by mode all the SMPS outputs are lowered
except for the low voltage output that supply the wake–up circuit located at the isolated side of the
power supply. In that mode the secondary regulation is performed by the zener diode connected in
parallel to the TL431.
The secondary reconfiguration status can be detected on the SMPS primary side by measuring the
voltage level present on the auxiliary winding Laux. (Refer to the Demagnetization Section). In the
reconfigured status, the Laux voltage is also reduced. The V
self–powering is no longer possible
CC
thus the SMPS enters in a hiccup mode similar to the one described under the Overload condition.
In the SMPS stand–by mode the 3 distinct phases are:
The SWITCHING PHASE: Similar to the Overload mode. The current sense clamping level is
reduced according to the equation of the current sense section, page 5. The C.S. clamping level
depends on the power to be delivered to the load during the SMPS stand–by mode. Every switching
sequence ON/OFF is terminated by an OC as long as the secondary Zener diode voltage has not been
reached. When the Zener voltage is reached the ON cycle is terminated by a true PWM action. The
proper SWITCHING PHASE termination must correspond to a NOC condition. The LW latch stores
this NOC status.
The LATCHED OFF PHASE: The MODE latch is set.
The START–UP PHASE is similar to the Overload Mode. The MODE latch remains in its set status
(Q=1).
The SWITCHING PHASE: The Stand–by signal is validated and the 200PA is sourced out of the
Current Sense pin 2.
4. Transition from Stand–by to Normal
The secondary reconfiguration is removed. The regulation on the low voltage secondary rail can no
longer be achieved, thus at the end of the SWITCHING PHASE, no PWM condition can be
encountered. The LW latch is reset.
At the next WORKING PHASE a NORMAL mode status takes place.
In order to become independent of the recovery time SWITCHING PHASE constant on the secondary
side of the SMPS an additional reset input R2 is provided on the MODE latch. The condition
I
<24PA corresponds to the activation of the secondary reconfiguration status. The R2 reset
demag
insures a return into the NORMAL mode following the first corresponds to 1V. START–UP PHASE.
Pulsed Mode Duty Cycle Control
During the sleep mode of the SMPS the switch S3 is closed and the control input pin 3 is connected to
TCL OVERSEAS HOLDINGS LIMITED Service Manual
17
a 4.6V voltage source thru a 500: resistor. The discharge rate of the VCC capacitor is given by
I
–latch (device consumption during the LATCHED OFF phase) in addition to the current drawn out
CC
of the pin 3. Connecting a resistor between the Pin 3 and GND (R
drawn from the V
presence of the resistor R
through pin 3. The duration of the LATCHED OFF phase is impacted by the
CC
DPULSED
. The equation 3 shows the relation to the pin 3 current.
DPULSED
) a programmable current is
Pulsed Mode Phases
Equations 1 through 8 define and predict the effective behavior during the PULSED MODE operation.
The equations 6, 7, and 8 contain K, Y, and D factors. These factors are combinations of measured
parameters. They appear in the parameter section “K factors for pulsed mode operation” page 4. In
equations 3 through 8 the pin 3 current is the current defined in the above section “Pulsed Mode Duty
Cycle Control”.
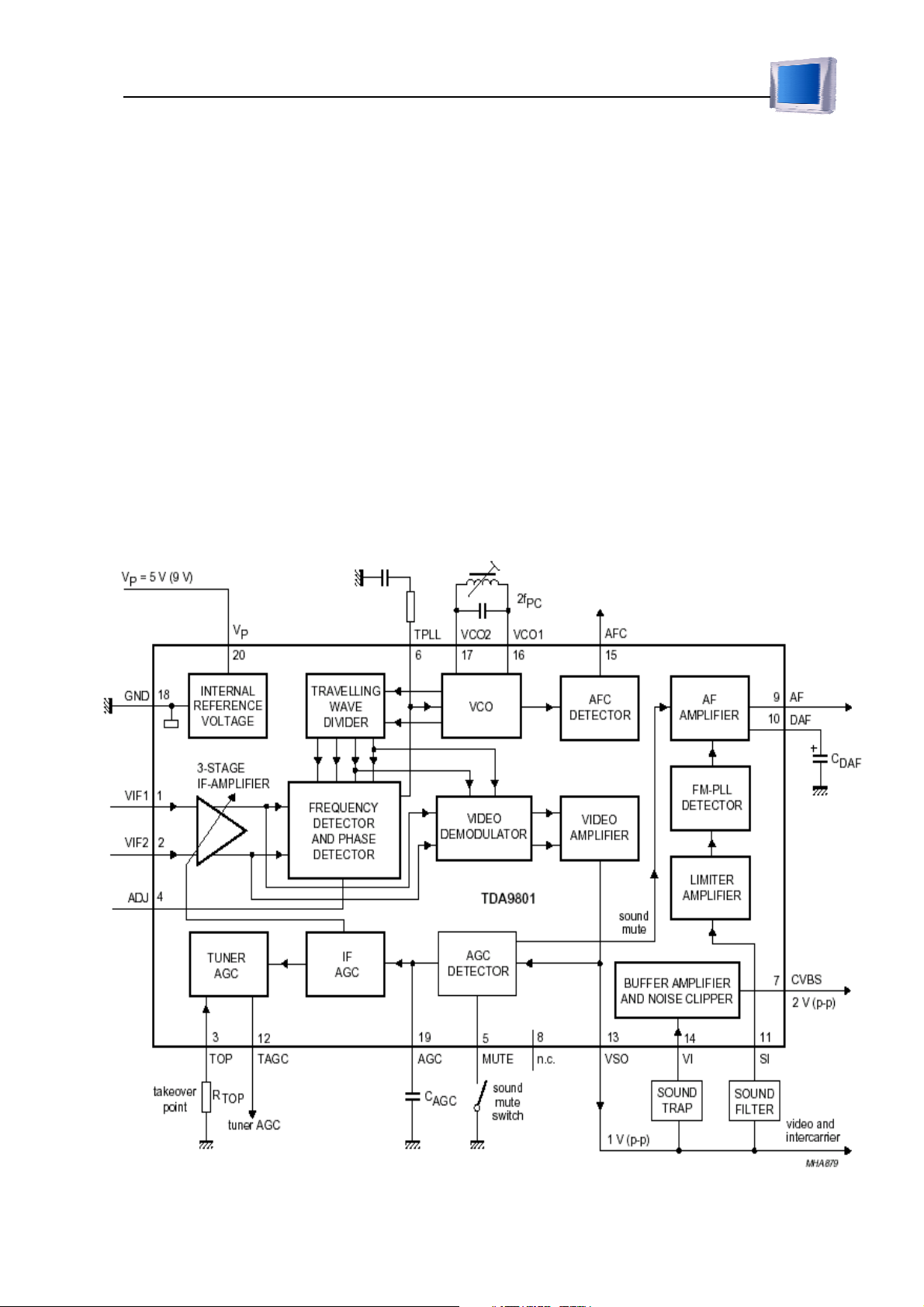
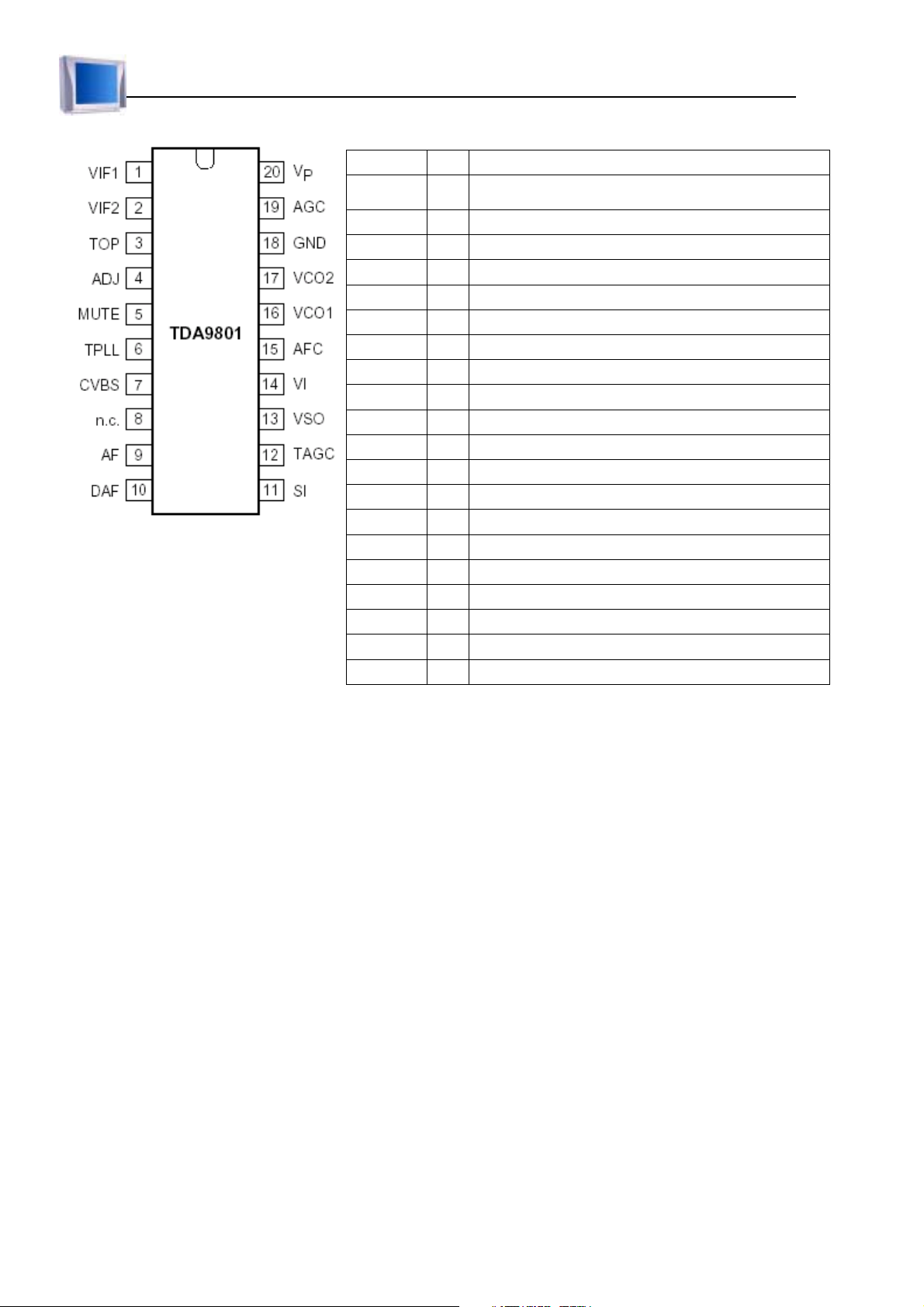
2. TDA9801-Single standard VIF-PLL demodulator and FM-PLL detector
FUNCTIONAL DESCRIPTION
18
Service Manual TCL OVERSEAS HOLDINGS LIMITED
SYMBOL PIN DESCRIPTION
VIF1
VIF2 2 VIF differential input 2
TOP 3 tuner AGC TakeOver Point (TOP) connection
ADJ 4 phase adjust connection
MUTE 5 sound mute switch connection
TPLL 6 PLL time constant connection
CVBS 7 CVBS (positive) video output
n.c. 8 not connected
AF 9 AF output
DAF 10 AF amplifier decoupling capacitor connection
SI 11 sound intercarrier input
TAGC 12 tuner AGC output
VSO 13 video and sound intercarrier output
VI 14 buffer amplifier video input
AFC 15 AFC output
VCO1 16 VCO1 reference circuit for 2fPC
VCO2 17 VCO2 reference circuit for 2fPC
GND 18 ground supply (0 V)
AGC 19 AGC detector capacitor connection
VP 20 supply voltage (+5 V)
VIF differential input 1
1
Stage IF amplifier
The VIF amplifier consists of three AC-coupled differential amplifier stages. Each differential stage
comprises a feedback network controlled by emitter degeneration.
AGC detector, IF AGC and tuner AGC
The automatic control voltage to maintain the video output signal at a constant level is generated in
accordance with the transmission standard. Since the TDA9801 is suitable for negative modulation
only the peak sync pulse level is detected.
The AGC detector charges and discharges capacitor C
voltage on capacitor C
AGC is transferred to an internal IF control signal, and is fed to the tuner AGC to
AGC to set the IF amplifier and tuner gain. The
generate the tuner AGC output current on pin TAGC (open-collector output). The tuner AGC takeover
point level is set at pin TOP. This allows the tuner to be matched to the SAW filter in order to achieve
the optimum IF input level.
Frequency detector and phase detector
The VIF amplifier output signal is fed into a frequency detector and into a phase detector. During
acquisition the frequency detector produces a DC current proportional to the frequency difference
between the input and the VCO signal. After frequency lock-in the phase detector produces a DC
current proportional to the phase difference between the VCO and the input signal. The DC current of

TCL OVERSEAS HOLDINGS LIMITED Service Manual
19
either frequency detector or phase detector is converted into a DC voltage via the loop filter which
controls the VCO frequency.
Video demodulator
The true synchronous video demodulator is realized by a linear multiplier which is designed for low
distortion and wide bandwidth. The vision IF input signal is multiplied with the ‘in phase’ component
of the VCO output. The demodulator output signal is fed via an integrated low-pass filter (f
= 12
g
MHz) for suppression of the carrier harmonics to the video amplifier.
VCO, AFC detector and travelling wave divider
The VCO operates with a symmetrically connected reference LC circuit, operating at the double
vision carrier frequency. Frequency control is performed by an internal variable capacitor diode.
The voltage to set the VCO frequency to the actual double vision carrier frequency is also amplified
and converted for the AFC output current.
The VCO signal is divided-by-2 with a Travelling Wave Divider (TWD) which generates two
differential output signals with a 90 degree phase difference independent of the frequency.
Video amplifier
The composite video amplifier is a wide bandwidth operational amplifier with internal feedback. A
nominal positive video signal of 1 V (p-p) is present at pin VSO.
Buffer amplifier and noise clipper
The input impedance of the 7 dB wideband CVBS buffer amplifier (with internal feedback) is suitable
for ceramic sound trap filters. Pin CVBS provides a positive video signal of 2 V (p-p). Noise clipping
is provided internally.
Sound demodulation
L
IMITER AMPLIFIER
The FM sound intercarrier signal is fed to pin SI and through a limiter amplifier before it is
demodulated. The result is high sensitivity and AM suppression. The limiter amplifier consists of 7
stages which areinternally AC-coupled in order to minimizing the DC offset.
FM-PLL DETECTOR
The FM-PLL demodulator consists of an RC oscillator, loop filter and phase detector. The oscillator
frequency is locked on the FM intercarrier signal from the limiter amplifier. As a result of this locking,
the RC oscillator is frequency modulated. The modulating voltage (AF signal) is used to control the
oscillator frequency. By this, the FM-PLL operates as an FM demodulator.
AF AMPLIFIER
The audio frequency amplifier with internal feedback is designed for high gain and high
common-mode rejection. The low-level AF signal output from the FM-PLL demodulator is amplified
and buffered in a low-ohmic audio output stage. An external decoupling capacitor CDAF removes the
20
DC voltage from the audio amplifier input.
By using the sound mute switch (pin MUTE) the AF amplifier is set in the mute state.
Service Manual TCL OVERSEAS HOLDINGS LIMITED
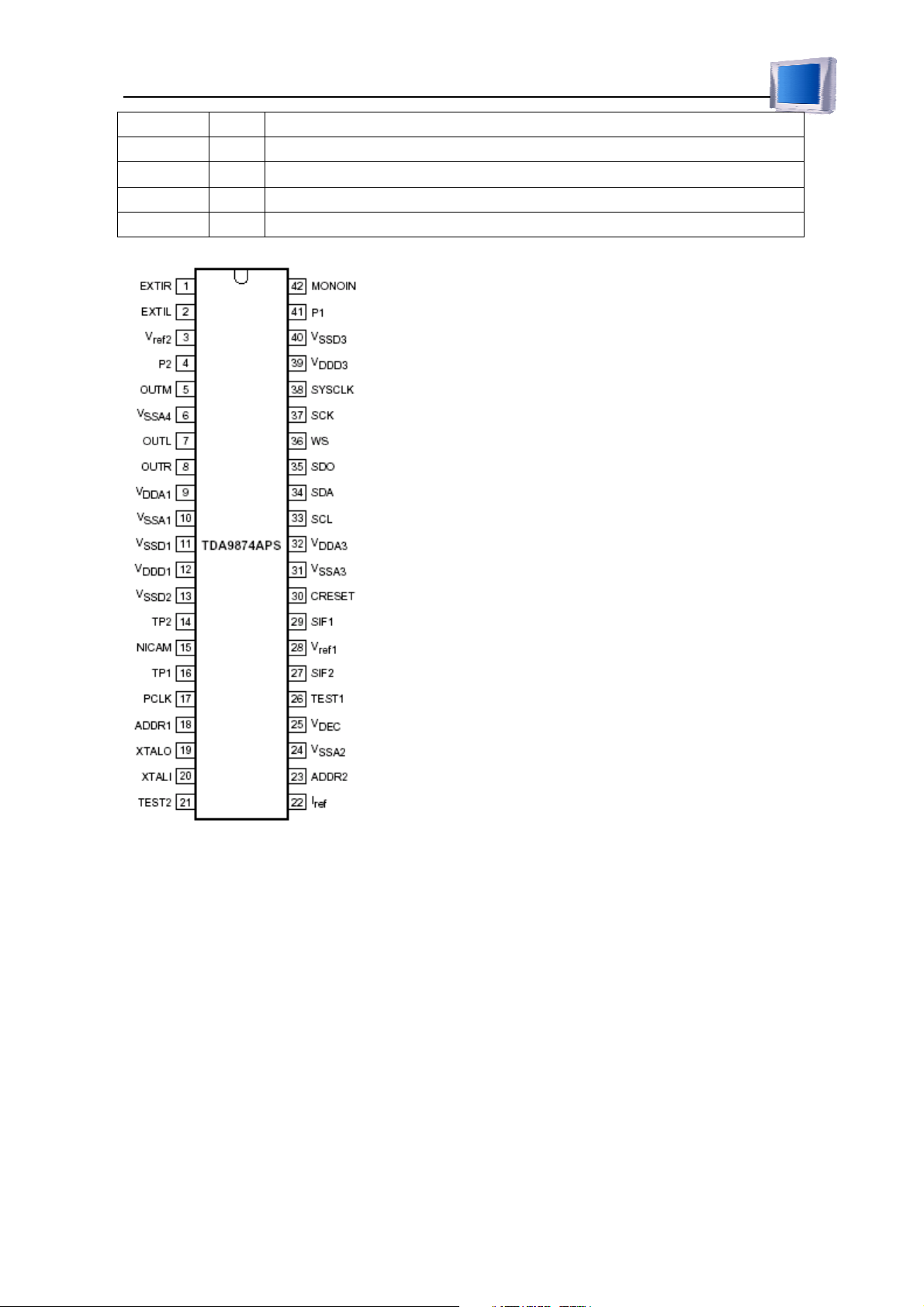
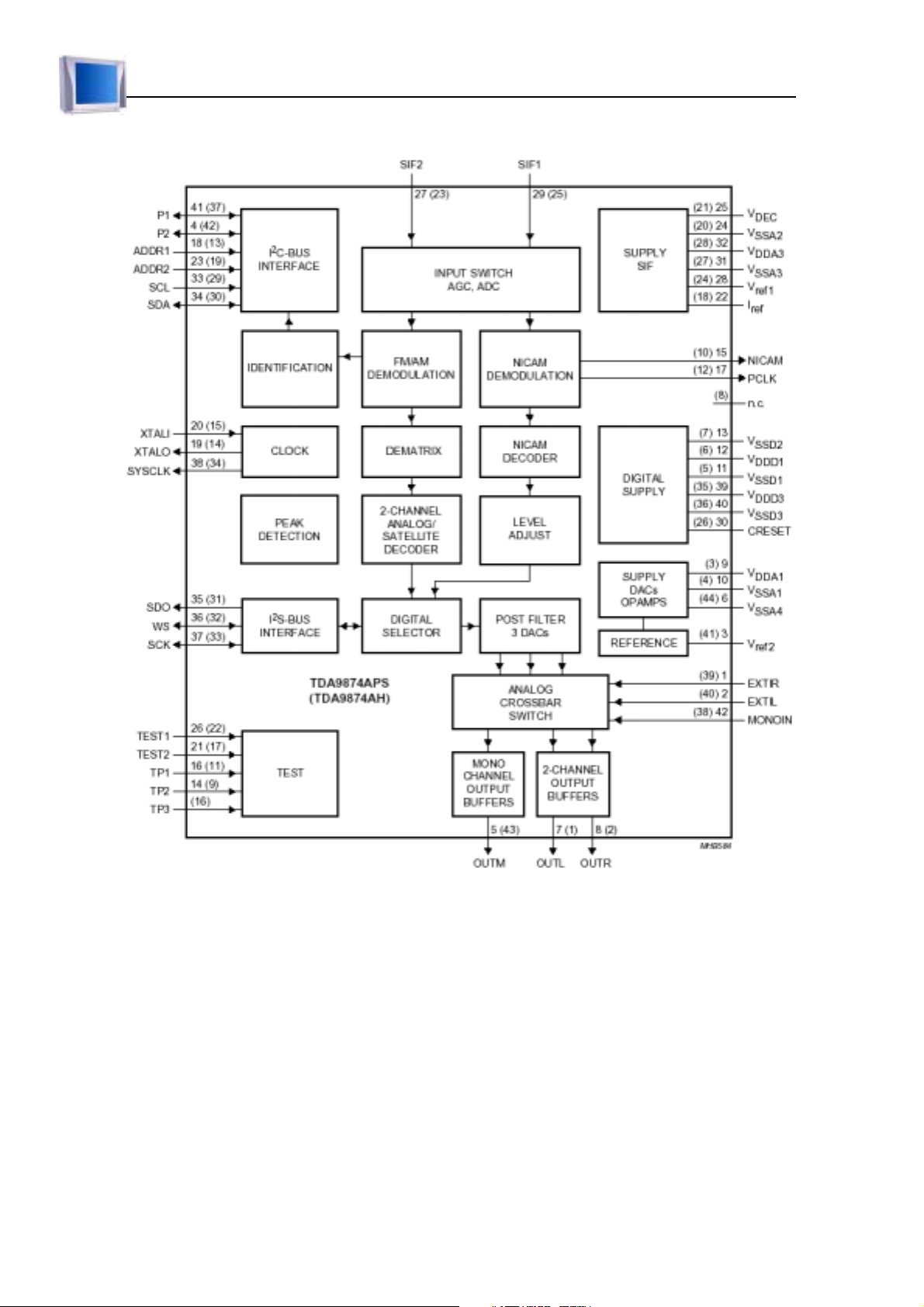
3. TDA9874A Digital TV sound demodulator/decoder
SYMBOL PIN DESCRIPTION
EXTIR 1 external audio input right channel
EXTIL 2 external audio input left channel
Vref2 3 analog reference voltage for DAC and operational amplifiers
P2 4 second general purpose I/O pin
OUTM 5 analog output mono
VSSA4 6 analog ground supply 4 for analog back-end circuitry
OUTL 7 analog output left
OUTR 8 analog output right
VDDA1 9 analog supply voltage 1; back-end circuitry 5 V
VSSA1 10 analog ground supply 1; back-end circuitry
VSSD1 11 digital ground supply 1; core circuitry
VDDD1 12 digital supply voltage 1; core voltage regulator circuitry
VSSD2 13 digital ground supply 2; core circuitry
TP2 14 additional test pin 2; connected to VSSD for normal operation
NICAM 15 serial NICAM data output (at 728 kHz)
TP1 16 additional test pin 1; connected to VSSD for normal operation
PCLK 17 NICAM clock output (at 728 kHz)
ADDR1 18 first I2C-bus slave address modifier input
XTALO 19 crystal oscillator output
XTALI 20 crystal oscillator input
TEST2 21 test pin 2; connected to VSSD for normal operation
Iref 22 resistor for reference current generation; front-end circuitry
ADDR2 23 second I2C-bus slave address modifier input
VSSA2 24 analog ground supply 2; analog front-end circuitry
VDEC 25 analog front-end circuitry supply voltage decoupling
TEST1 26 test pin 1; connected to VSSD for normal operation
SIF2 27 sound IF input 2
Vref1 28 reference voltage; for analog front-end circuitry
SIF1 29 sound IF input 1
CRESET 30 capacitor for Power-on reset
VSSA3 31 digital ground supply 3; front-end circuitry
VDDA3 32 analog front-end circuitry regulator supply voltage 3 (5 V)
SCL 33 I2C-bus serial clock input
SDA 34 I2C-bus serial data input/output
SDO 35 I2S-bus serial data output
WS 36 I2S-bus word select input/output
SCK 37 I2S-bus clock input/output
TCL OVERSEAS HOLDINGS LIMITED Service Manual
SYSCLK 38 system clock output
VDDD3 39 digital supply voltage 3; digital I/O pads
VSSD3 40 digital ground supply 3; digital I/O pads
P1 41 first general purpose I/O pin
MONOIN 42 analog mono input
FUNCTIONAL DESCRIPTION
Description of the demodulator and decoder section
1. SIF INPUTS
Two inputs are provided, pin SIF1 and pin SIF2. For higher SIF
signal levels the SIF input can be attenuated with an internal
switchable ҟ10 dB resistor divider. As no specific filters are
integrated, both inputs have the same specification giving
flexibility in application. The selected signal is passed through
an AGC circuit and then digitized by an 8-bit ADC operating at
24.576 MHz.
21
2. AGC
The gain of the AGC amplifier is controlled from the ADC
output by means of a digital control loop employing hysteresis.
The AGC has a fast attack behaviour to prevent ADC overloads,
and a slow decay behaviour to prevent AGC oscillations. For
AM demodulation the AGC must be switched off. When
switched off, the control loop is reset and fixed gain settings can
be chosen. The AGC can be controlled via the I2C-bus.
3. MIXER
The digitized input signal is fed to the mixers, which mix one or
both input sound carriers down to zero IF. A 24-bit control w
ord
for each carrier sets the required frequency. Access to the mixer
control word registers is via the I
2
C-bus or via Easy Standard Programming (ESP). When receivin
g
NICAM programs, a feedback signal is added to the control word of the second carrier mixer to
establish a carrier-frequency loop.
4. FM AND AM
DEMODULATION
An FM or AM input signal is fed through a switchable band-limiting filter into a demodulator that can
be used for either FM or AM demodulation. Apart from the standard (fixed) de-emphasis
characteristic, an adaptive de-emphasis is available for Wegener-Panda 1 encoded satellite programs.
5. FM
DECODING
A 2-carrier stereo decoder recovers the left and right signal channels from the demodulated sound
carriers. Both the European and Korean stereo systems are supported.
Automatic FM dematrixing is also supported, which means that the FM sound mode identification
22
(mono, stereo or dual) switches the FM dematrix directly. No loop via the microcontroller is needed.
Service Manual TCL OVERSEAS HOLDINGS LIMITED
For highly overmodulated signals, a high deviation mode for monaural audio sound single carrier
demodulation can be selected.
NICAM decoding is still possible in high deviation mode.
6. FM
IDENTIFICATION
The identification of the FM sound mode is performed by AM synchronous demodulation of the pilot
and narrow-band detection of the identification frequencies. The result is available via the I2C-bus
interface. A selection can be made via the I2C-bus for B/G, D/K and M standards, and for three
different time constants that represent different trade-offs between speed and reliability of
identification. A pilot detector allows the control software to identify an analog 2-carrier (A2)
transmission within approximately 0.1 s.

TCL OVERSEAS HOLDINGS LIMITED Service Manual
23
Automatic FM dematrixing, depending on the identification, is possible.
7. NICAM
DEMODULATION
The NICAM signal is transmitted in a DQPSK code at a bit rate of 728 kbits/s. The NICAM
demodulator performs DQPSK demodulation and passes the resulting bitstream and clock signal to the
NICAM decoder and, for evaluation purposes, to various pins.
A timing loop controls the frequency of the crystal oscillator to lock the sampling instants to the
symbol timing of the NICAM data.
8. NICAM
DECODING
The device performs all decoding functions in accordance with the “EBU NICAM 728 specification”.
After locking to the frame alignment word, the data is descrambled by applying the defined
pseudo-random binary sequence. The device then synchronizes to the periodic frame flag bit C0.
The status of the NICAM decoder can be read out from the NICAM status register by the user. The
OSB bit indicates that the decoder has locked to the NICAM data. The VDSP bit indicates that the
decoder has locked to the NICAM data and that the data is valid sound data. The C4 bit indicates that
the sound conveyed by the FM mono channel is identical to the sound conveyed by the NICAM
channel.
The error byte contains the number of sound sample errors (resulting from parity checking) that
occurred in the past 128 ms period. The Bit Error Rate (BER) can be calculated using the following
equation:
BER = bit errors / total bits §error byte h 1.74 hҏ10
-5
9. NICAM AUTO-MUTE
This function is enabled by setting bit AMUTE to logic 0. Upper and lower error limits may be
defined by writing appropriate values to two registers in the I
2
C-bus section. When the number of
errors in a 128 ms period exceeds the upper error limit, the auto-mute function will switch the output
sound from NICAM to whatever sound is on the first sound carrier (FM or AM) or to the analog mono
input. When the error count is smaller than the lower error limit, the NICAM sound is restored.
The auto-mute function can be disabled by setting bit AMUTE to logic 1. In this case clicks become
audible when the error count increases. The user will hear a signal of degrading quality.
If no NICAM sound is received, the outputs are switched from the NICAM channel to the 1st sound
carrier.
A decision to enable or disable the auto-mute is taken by the microprocessor based on an
interpretation of the application control bits C1, C2, C3 and C4, and possibly any additional strategy
implemented by the user in the microcontroller software.
When the AM sound in NICAM L systems is demodulated in the 1st sound IF and the audio signal
connected to the mono input of the TDA9874A, the controlling microprocessor has to ensure
switching from NICAM reception to mono input, if auto-muting is desired. This can be achieved by
24
Service Manual TCL OVERSEAS HOLDINGS LIMITED
setting bit AMSEL = 1 and bit AMUTE = 0.
10. CRYSTAL OSCILLATOR
The digital controlled crystal oscillator (DCXO) is fully integrated. Only an external 24.576 MHz
crystal is required.
11. T
EST PINS
All test pins are active HIGH. In normal operation of the device they can be left open-circuit, as they
have internal pull-down resistors. Test functions are for manufacturing tests only and are not available
to customers.
12. P
OWER FAIL DETECTOR
The power fail detector monitors the internal power supply for the digital part of the device. If the
supply has temporarily been lower than the specified lower limit, the power failure register bit PFR in
subaddress 0, will be set to logic 1. Bit CLRPFR, slave register subaddress 1, resets the Power-on
reset flip-flop to logic 0. If this is detected, an initialization of the TDA9874A has to be performed to
ensure reliable operation.
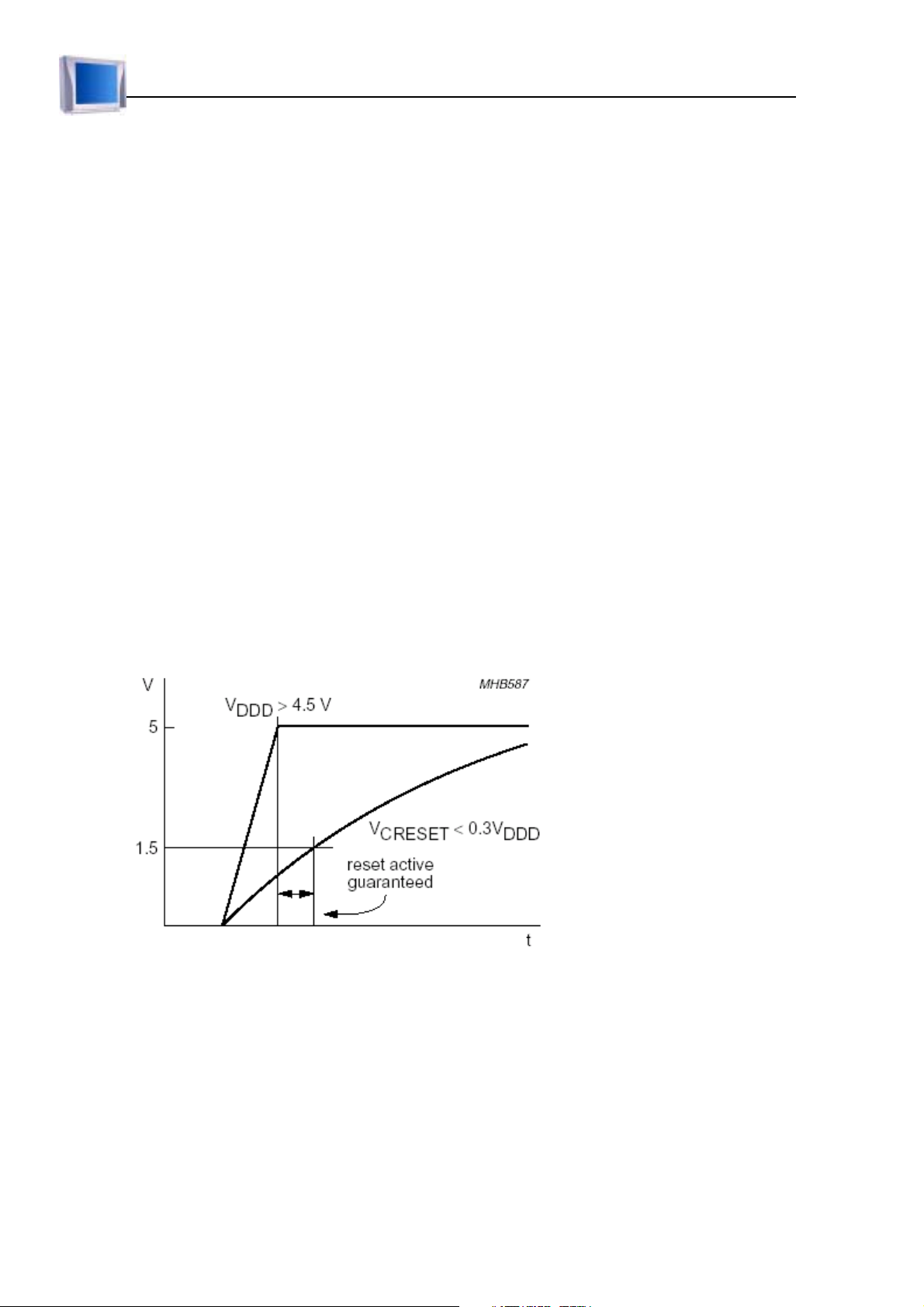
OWER-ON RESET
13. P
The reset is active LOW. In order to perform a reset at power-up, a simple RC circuit may be used
which consists of an integrated passive pull-up resistor and an external capacitor connected to ground.
The pull-up resistor has a nominal value of 50 k , which can easily be measuredǂ between pins
CRESET and VDDD3. Before the supply voltage has reached a certain minimum level, the state of
the circuit is completely undefined and remains in this undefined state until a reset is applied.
The reset is guaranteed to be active
when:
ҏThe power supply is within the ǂ
specified limits (4.5 to 5.5 V)
ҏThe crystal oscillator (DCXO) is ǂ
functioning
ҏThe voltage at pin CRESET is ǂ
below 0.3VDDD (1.5 V if VDDD
= 5.0 V, typically below 1.8 V).
The required capacitor value
depends on the gradient of the
rising power supply voltage. The time constant of the RC circuit sh
ould be clearly larger than the rise
time of the power supply (to make sure that the reset condition is always satisfied), even when
considering tolerance spreading. To avoid problems with a too slow discharging of the capacitor at
power-down, it may be helpful to add a diode from pin CRESET to VDDD.
should be noted that the internal ESD protection diode does not help here as it only conducts at
It
higher voltages. Under difficult power supply conditions (e.g. very slow or non-monotonic ramp-u
it is recommended to drive the reset line from a microcontroller port or the like.
p),
 Loading...
Loading...