

Page 1
Distributed by
Any reference to Raytheon or
RTN in this manual should be
interpreted as Raymarine.
The names Raytheon and RTN
are owned by the
Raytheon Company.
Page 2
Installation and Operating Handbook
Autohelm”
ANNOGUE
Page 3
.;-:
AUTOHELM
5000
The Autohelm 5000 is a modern high
performance autopilot specifically developed
for sailing and motor vessels of up to 40’(13m)
LOA.
It is exceptionally easy to operate and its
advanced micro-electronic control circuit gives
outstanding steering performance.
The Autohelm 5000 is distinguished by its
automatic course locking capability which
permits change-over from manual to automatic
steering by a single push-button control. From
then on the original heading is rigidly
maintained by the automatic trim system which
continuously monitors trim changes and offsets
the mean wheel position to compensate. In
addition, the rate of
in proportion to the rate at which the vessel
moves off course, giving the
smooth steering capability of an experienced
helmsman.
wheel
rotation is regulated
Autohelm
5000 the
The basic system comprises a Drive Unit
and Control Unit inter-connected by a
pluggable multi-core cable. A complete range
of optional remote control accessories are
available which are also pluggable to the
Control Unit. After fitting the system it is only
necessary to make a single adjustment to the
Control Unit
response range to the character of a particular
vessel.
The Autohelm 5000 is exceptionally easy to
install and prepare for sea trials. Sound
installation however is vital if the system’s high
standard of performance and reliability is to be
achieved. The installation notes should be
followed carefully and in cases where special
advice may be needed you are encouraged to
contact our Technical Sales Department where
expert assistance is always available.
in‘,order
to match the system’s
Page 4
I .O
SYSTEM DESCRIPTION
The Autohelm 5000 is a modular system
that can be built up from a minimum number of
standardised units to match the individual
requirements of a wide range of sailing and
power vessels. The rudder drive system may be
chosen from a range of rotary, linear and
hydraulic drive units to best suit the vessel’s
particular steering system.
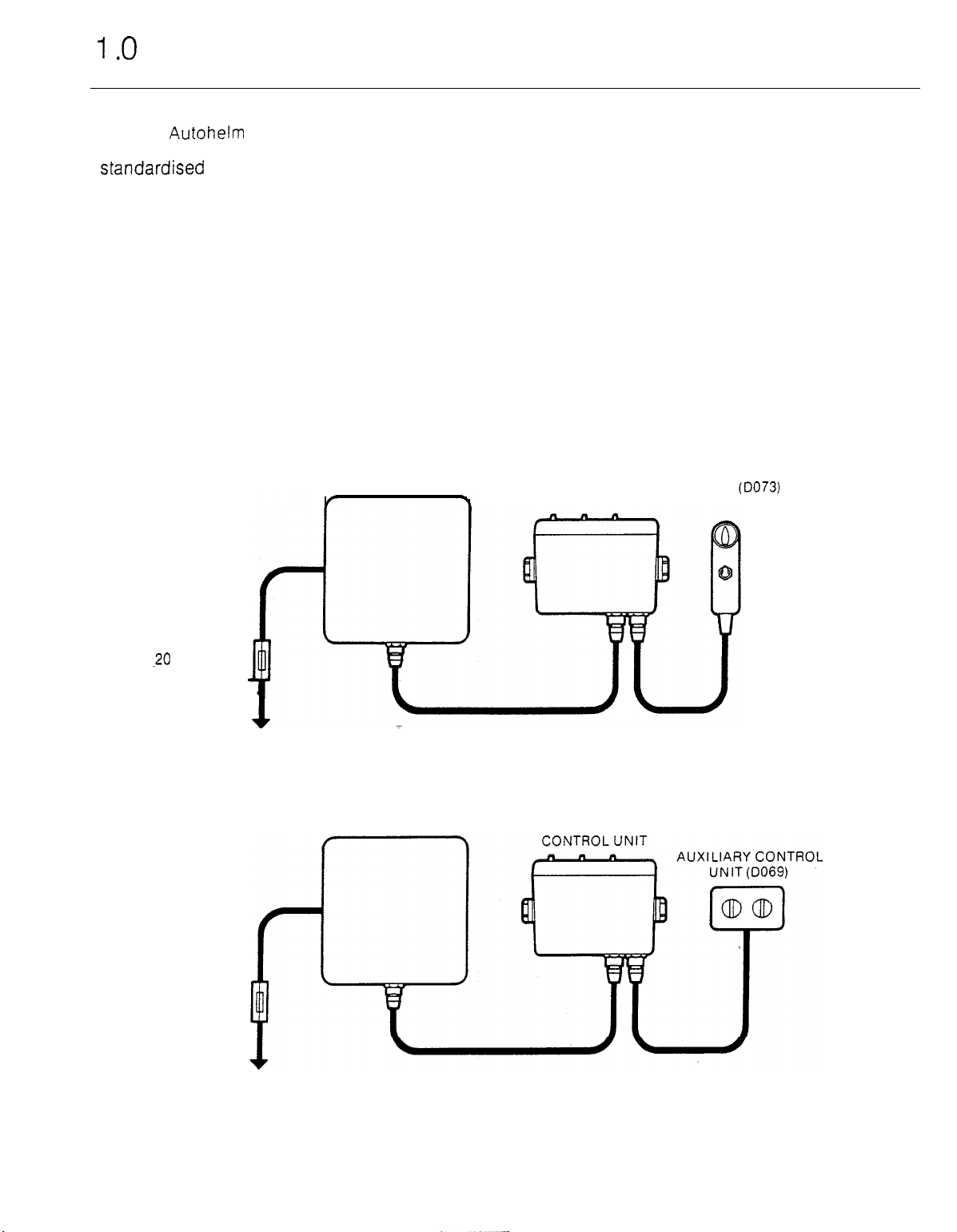
The most basic installation (Fig. 1) consists
of a control unit inter-connected by a pluggable
cable system to a drive unit. This installation
would be suitable for a motor vessel with a
single enclosed steering position, and where no
requirement exists for remote control facilities.
Hand-held remote control unit type DO73 may
be plugged directly into the Control Unit
auxiliary socket.
DRIVE UNIT
A simple remote control installation is
illustrated in Fig. 2. The auxiliary control unit
repeats the basic working controls of the main
control unit and is suitable for extending
autopilot control to a secondary steering
position. Alternatively, in the case of a sailing
yacht for example, the auxiliary control unit
provides a watertight cockpit control enabling
the control unit to be mounted in a protected
position below deck.
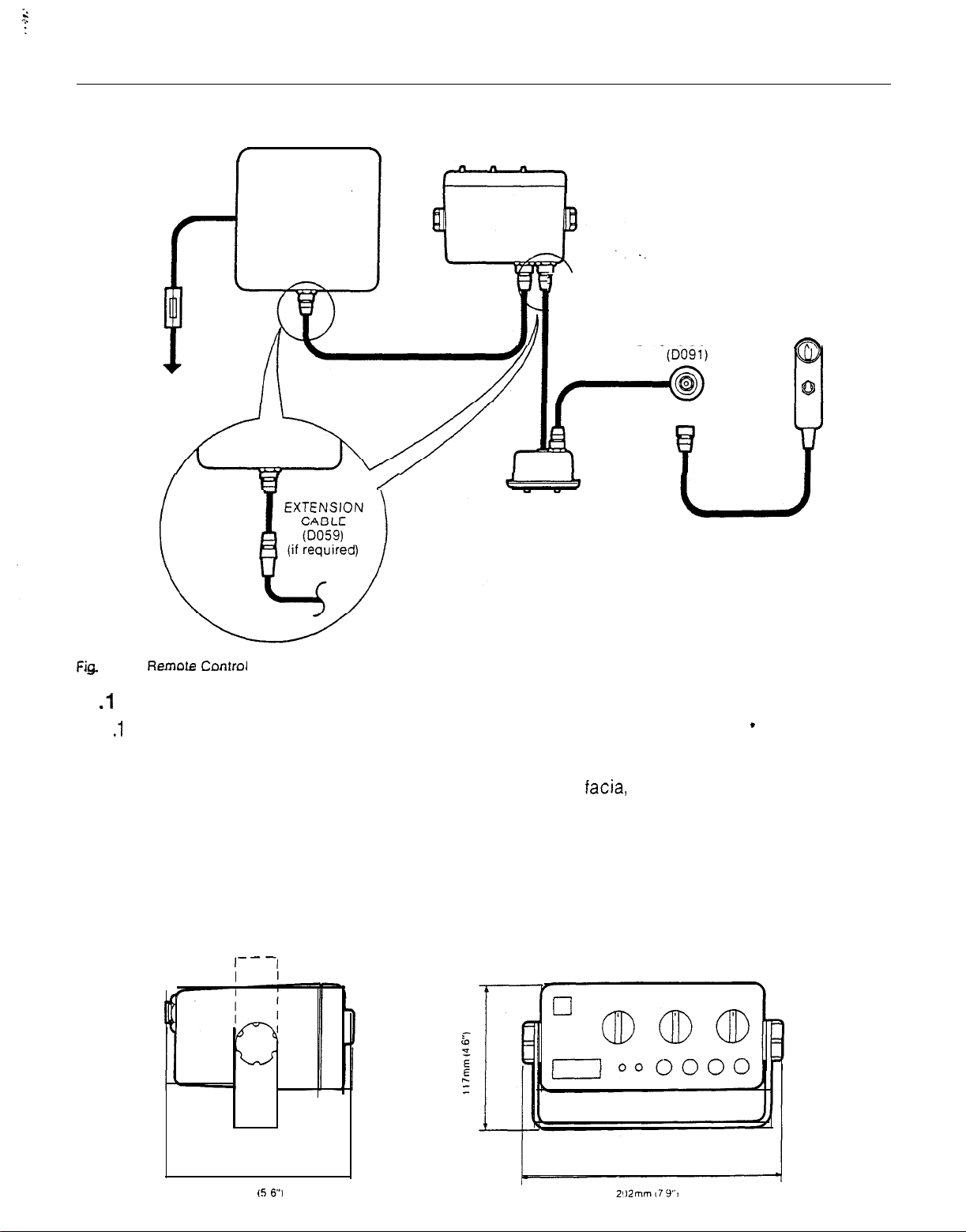
The full remote control system (Fig. 3)
provides the addition of a hand-held remote
control unit.
DIRECT REMOTE
CONTROL (D073)
CONTROL UNIT
(OPTION)
.20
AMP FUSE
DC SUPPLY
Fig. 1 Basic System
20 AMP FUSE
DC SUPPLY
DRIVE UNIT
Fig. 2 Basic Remote Control System
Page 5
f
DRIVE UNIT
\
CONTROL UNIT
20 AMP
FUSE
DC
SUPPLY
Fig
3 Full Remote
/
Contrd
Ef
System
/
1 .l CONTROL SYSTEM
1.1 .l CONTROL UNIT
The control unit is common to all installations
and is provided with six metres of multi-core
cable with pre-connected plugs and sockets to
connect to the drive unit. It houses the main
control circuit PCB together with the automatic
course following compass system. The control
unit case is splash proof, but not watertight, and
is, therefore, intended for mounting in a dry and
protected position. Two sockets are provided
on the rear case for connecting the drive unit
and remote control system.
1
J
REMOTE SOCKET
AUXILIARY
CONTROL UNIT
HAND HELD
REMOTE CONTROL
(0093)
m
.
Rotary controls for course alteration, rudder
response and sea state are grouped on the
control unit
facia,
together with the push-button
primary working controls. A secondary gain
control is inset into the rear case to allow
adjustment of the system’s rudder response
range to match the widely differing steering
characteristics of both planing and
displacement vessels. The control unit is
suitable for use on 12 volt systems.
r-
I-- -1
142mm (5
VI
-i
Page 6
1
.1.2
REMOTE CONTROL
ACCESSORIES
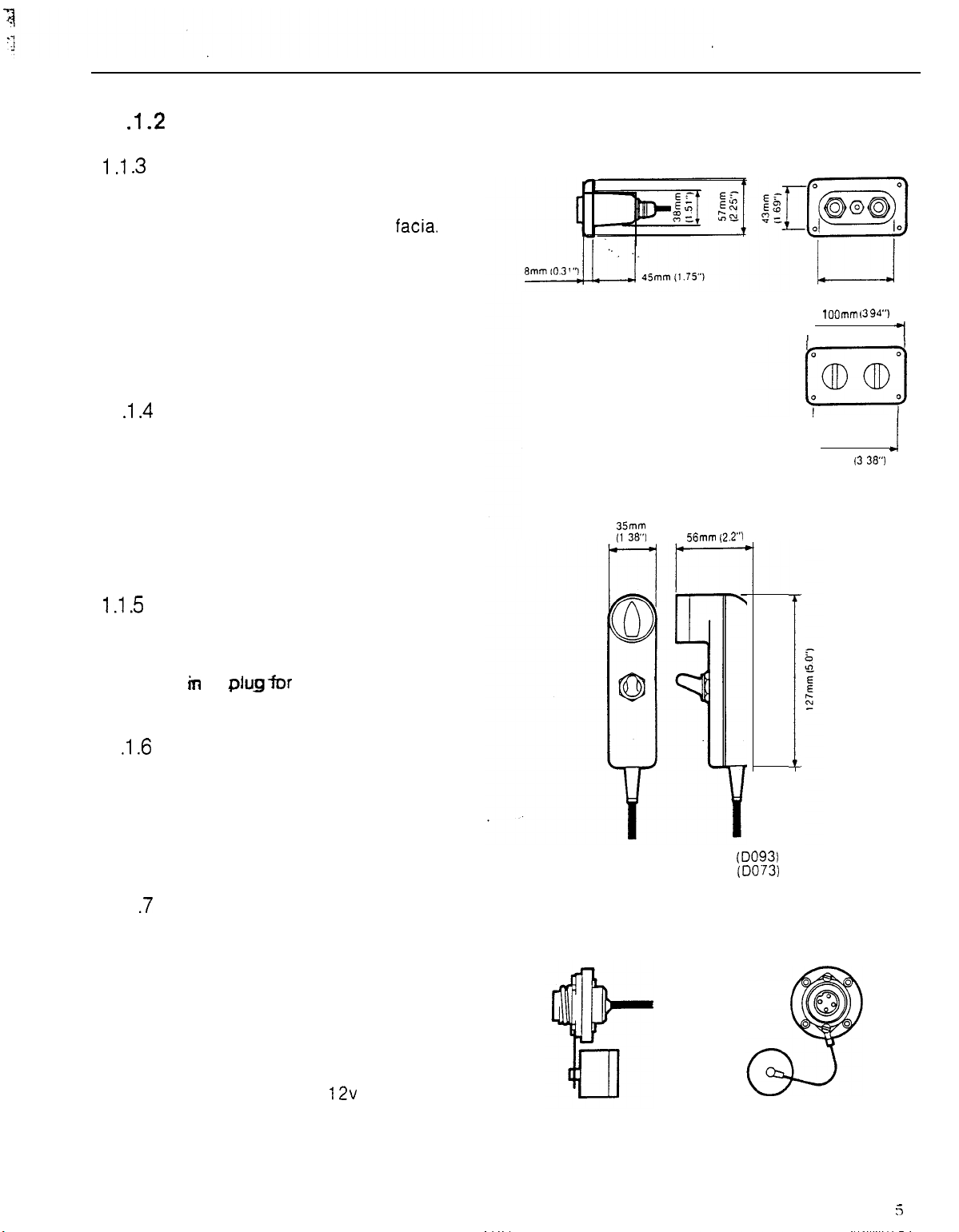
1 .I .3
AUXILIARY CONTROL UN IT
Autopilot control may be transferred to the
auxiliary control unit by depressing the Remote
push-button on the main control unit
auxiliary control unit is watertight and designed
for flush mounting in severely exposed
positions.
It is provided with six metres of cable
terminated in a waterproof plug for direct
connection to the control unit. A connector is
situated on the rear case for connecting handheld remote control deck socket.
1
.1.4
REMOTE CONTROL UNITS
The remote control is a hand-held unit that
enables the autopilot to be overriden and the
vessel to be power steered from anywhere on
board. The unit is fitted with a six-metre flying
lead, Type DO73 is suitable for direct
connection to the Control Unit auxiliary socket.
Type DO93 is fitted with a waterproof plug for
connection to a waterproof deck socket.
facia.
The
Auxiliary control Unit DO69
35mm
I1
38”)
56mm (2.2”)
(3.2”) 81 mm
1 OOmm
r
86mm (3 38”)
(3
9U
i
1.15
REMOTE SOCKET
The remote socket provides a watertight
socket for the hand-held remote control. The
socket is supplied with 6 metres of 3 core cable
terminating in a
the Auxiliary Control Unit.
1
.1.6
CABLE EXTENSION
The cable extension facilitates the lengthening
of all multi-core cables in six-metre increments.
The extension cable is terminated with
compatible waterproof connectors for insertion
into the cable harness in the positions shown in
Fig. 3.
plugfor
direct connection to
1 .I .7 CATALOGUE NUMBERS
CONTROL SYSTEMS
Control Unit
Auxiliary Control Unit
Remote Control
Direct Remote Control
Remote Socket
Cable Extension
DRIVE SYSTEMS
Rotary
Linear
Hydraulic
2068
DO69
DO93
DO73
DO91
DO59
12v
only
Z069
2070
2071
Hand Held Remote Control Unit
Direct Remote Control
Remote Socket DO91
I
(D093t
(0073)
0
Page 7
1.2 DRIVE SYSTEMS
Mechanical steering systems may be driven by
either a rotary or linear drive unit. Some steering
systems are fitted with an autopilot drive shaft,
and in such cases the choice of a rotary drive
system is straightforward. In general, if a drive
shaft exists and lost motion does not exceed
2% of total rudder movement, the rotary drive
unit becomes the most economic choice. In all
other cases the linear drive unit will provide the
simplest installation since it may be connected
directly to a tiller link on the rudder stock. Total
independence of the mechanical steering
linkage also allows the linear drive unit to be
used to power steer the vessel in the event of
steering linkage failure, and this is an important
safety feature. In addition, minimisation of
working parts improves the overall efficiency of
the rudder drive system and reduces lost
motion to an absolute minimum.
All vessels with hydraulic steering systems
will require a hydraulic drive unit.
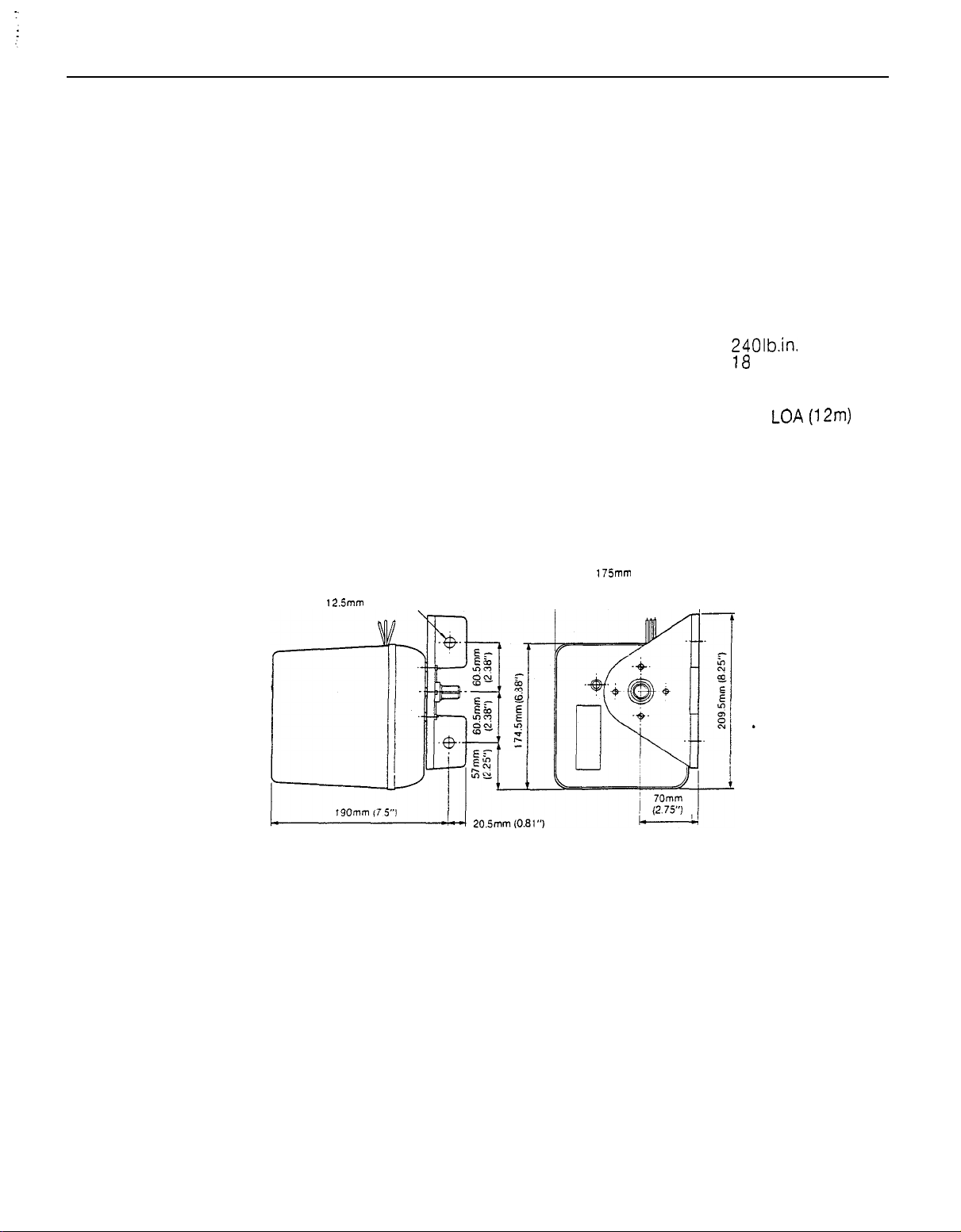
1.2.1 ROTARY DRIVE UNIT
The output shaft is driven by a continuously
rated servo motor via an efficient reduction
gearbox. The gearbox is dry lubricated to permit
operation in any attitude. A fail safe friction
clutch within the gear train engages
automatically when the autopilot is switched to
Duty and will disengage instantly even under
extreme load when the autopilot is switched
to Set.
Supply voltage
Peak output torque
Maximum shaft speed
Power consumption (typical
average)
Suitable for vessels up to
175mm
(6.88”)
12 volts
240lb.in. (27Nm)
18
rpm
1 S-3 amps
40ft.
LOA (12m)
2 Holes: 12Smm (0.5”) diameter
r----i
Page 8
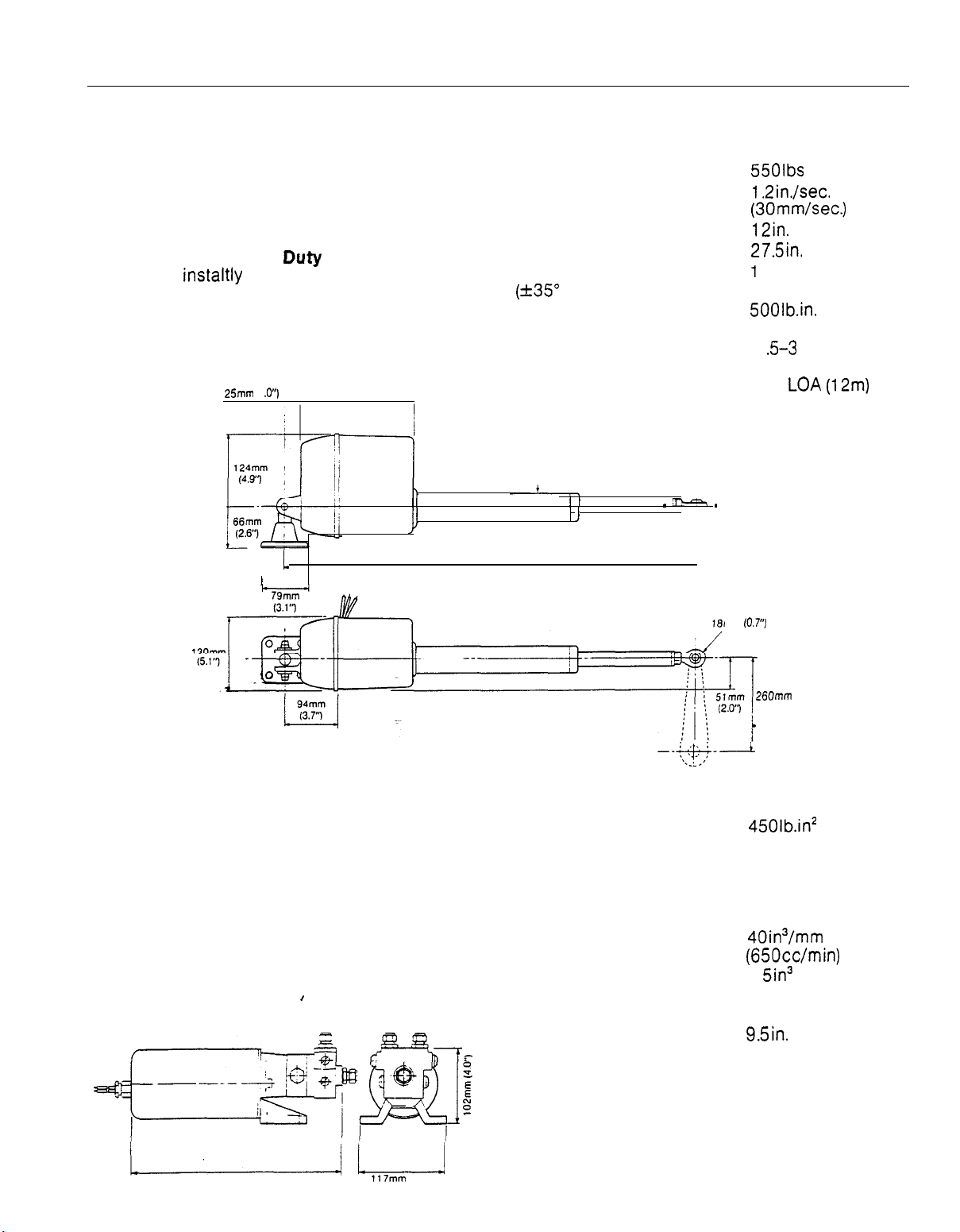
1.2.2 LINEAR DRIVE UNIT
The output ram of the linear drive unit is driven
by a declutchable re-circulating ball leadscrew
which enables the drive unit to .be permanently
coupled to the rudder stock via a simple crank
or tiller arm. The drive is automatically engaged
by means of an internal friction clutch when the
autopilot is switched to Duty and will
disengage instaltly even under heavy load
when the autopilot is switched to Set or Off.
25mm
(1
.o”) 207mm (6.15”)
Supply voltage
Peak thrust
Maximum stroke speed
Maximum stroke
Overall length at mid stroke
Tiller arm length
(+35” rudder)
Maximum rudder torque
Power consumption (typical
average)
Suitable for vessels up to
51 mm (2.0”)
12 volts
550lbs (225Kg)
1.2in./sec.
(30mm/sec.)
12in.
(300mm)
27.5in.
(700mm)
1
Oin. (260mm)
500lb.in.
(570Nm)
1
Z-3
amps
40ft.
LOA (12m)
JJ
! 1
I
1.2.3 HYDRAULIC DRIVE UNIT
The hydraulic drive unit consists of a precision
gear pump with integral valve block driven by a
continuously rated servo motor. A special
pressure balance valve corrects the effects of
hydraulic slip and isolates the pump from the
steering circuit when the autopilot is not
energised.
,
700mm lZ7.5”)
Supply voltage
Regulated peak pressure
Flow control
Peak flow rate (unloaded)
Maximum ram capacity
Power consumption (typical
average)
Overall length
1
_ ,- _
,
--+j$--
/
I
mm (0.7”) RADIUS
r
260mm
(10.0”)
12 volts
4501b.in2
(30 bar)
integral pilot
check and
pressure
balance valve
sys tern
40in3/mm
(650cc/min)
1 5in3 (25Occ)
2-3.5 amps
9.5in.
(240mm)
/L/
240mm (9.5”) 117mm (4.6”)
Page 9

2.0 INSTALLATION
The Atitohalm 5CCC is
install and prepare for sea trials. Sound
installation however is vital if the system’s high
standard of performance and reliability is to be
achieved. The installation notes should be
followed carefully and in cases where special
advice may be needed you are encouraged to
contact our Technical Sales Department where
expert assistance is always available.
excepticnally
easy
tc
2.1 CONTROL SYSTEM
2.1.1
CONTROL UNIT
The control unit is the most sensitive part of the
system and care should be taken to select a
mounting position that is reasonably free from
vibration and protected from external weather
conditions. The control unit is mounted in an
aluminium frame which can be pivoted to
permit fixing to either horizontal or vertical
surfaces. The frame is finally fixed into position
by two No. 8 (4mm) diameter countersunk head
stainless steel or brass screws.
In the case of a vessel with an enclosed
wheelhouse, it would normally be desirable to
mount the control unit sufficiently near to the
wheel so that the controls are easily accessible
to the helmsman. However, since the control
unit incorporates a magnetic compass it is
necessary to position it at least 2ft 6in (80cm)
away from the nearest steering compass in
.order to avoid
Deviation of the control unit compass is much
less critical because of its auto-following
capability. Nevertheless excessive deviation
should be avoided as far as possible in order to
maintain uniform sensitivity on all headings. The
control unit should thus be mounted as far
away as possible from iron or other magnetic
devices. If any doubt exists, the chosen site
should be checked by means of a handbearing
compass. The handbearing compass should be
fixed into the chosen position and the vessel
swung through 360 degrees. Relative
differences in reading between the
handbearing compass and the main steering
compass should not vary by more than 20
degrees.
In rare cases even the above extreme
deviation tolerance may not be achievable, in
which case an alternative site remote from the
steering position must be selected. In such a
case it will be necessary to operate the
autopilot through an auxiliary control unit
situated near the steering position. Installation
in steel hulled vessels invariably presents
difficulties and the advice of a compass
adjuster should always be sought.
Sarling
steering position are a special case where it is
devi&on
yachts with a single external
Df both compasses.
essential to operate the autopilot via a
proof auxiliary control unit. The auxiliary control
unit would normally be mounted in the cockpit
adjacent to the steering position and the
control unit situated below in a suitably
protected position.
The compass within the control unit is
capable of satisfactory operation at roll and
pitch angles of up to
unit should, therefore, be positioned as near to
horizontal as possible to maximise gimbal
action in all directions. In the case of a sailing
yacht where sustained heel angles may on
occasions exceed the above limit, it will be
necessary to readjust the control unit to a near
horizontal position on each tack. To faciliate
this, the control unit’s suspension frame should
be mounted parallel to the direction of the heel
axis.
-r-30
degrees. The control
weathsr-
2.1.2 AUXILIARY CONTROL UNIT
The Auxiliary Control Unit is connected directly
to the auxiliary connector on the Control Unit.
The unit is waterproof and should be positioned
close to the steering wheel. It is designed for
discreet flush mounting and a pattern is
provided to assist panel cutting before fitting.
Matching black self-tapping screws are
provided to secure the auxiliary control unit
facia in position. A good quality silicone sealant
should be used to seal between the facia and
the mounting panel.
2.1.3
HAND-HELD REMOTE’CONTROL
SYSTEM
It is usually desirable to arrange for operation
of the hand-held control unit from anywhere on
deck. For this purpose up to two remote
sockets may be strategically positioned to
make this practical without the need for long
and potentially hazardous flying leads on the
hand-held unit. In the case of a sailing yacht for
example, one socket position in the foredeck
area and another in the cockpit usually makes
a perfect arrangement. The sockets are flush
mounted and a pattern is provided to simplify
panel cutting. Matching black self-tapping
screws are also supplied. A good quality
silicone sealant should be used to seal the joint
between the socket facia and the mounting
face. When more than one remote control
socket is required, the three core interconnecting cables may be paralled together
using a standard cable junction box before
connection to the Auxiliary Control Unit.
8
Page 10

2.2 DRIVE SYSTEM
The following notes describe the installation of
both the rotary and linear drive units.
2.2.1 ROTARY DRIVE UNIT
The rotary drive unit is coupled to the vessel’s
steering mechanism by a simple chain drive.
Most steering gear manufacturers supply
special autopilot drive attachments and many
include this facility as standard.
Fig. 7 shows recommended rudder hardover
to hardover times for both planing and
displacement vessels up to 42 feet (13m)
The charts shown in Fig. 8 enables the chain
reduction ratio for optimum rate of rudder
application to be selected for both planing and
displacement vessels. To use the charts, it is
first necessary to determine the number of turns
of the driven sprocket when the rudder is driven
from hardover to hardover.
LOA.
equally spaced caphead screws, and may be
rotated through 90 degrees to provide a more
convenient mounting position if required (Fig. 6)
tn
some cases, it may be necessary to
fabricate a special frame to mount the drive
unit. It should be noted that chain tension can
exceed
3OOlb (.l.50kg),
and thus an extremely
rigid mounting structure is vital to maintain
good chain alignment. Installation failures
frequently occur in this area, and as a general
rule it is desirable to ‘over engineer’ the drive
unit mounting.
3.22-3.24mm
(0.127”-0
1275”)
1
Example:
A 40 foot
(12m) LOA
displacement vessel
requiring two turns of the driven sprocket to
drive the rudder from hardover to
hardover
will
require a chain reduction ratio of approximately
3:l (as indicated by the dotted line on the
chart). The table on the left hand side of the
chart gives suitable sprocket combinations. In
this example, the required reduction ratio of 3:l
would be best achieved by a 38 tooth sprocket
driven by a 13
Mti.mcket
on the drive unit.
It should be borne in mind that the
reduction ratios recommended are for the
‘average case’ and that vessels broadly
classified by length and hull type can vary
significantly in steering characteristics.
Selection of the correct chain reduction ratio is
not over critical however, and any slight
mismatch can usually be corrected later during
sea trials by an adjustment to the gain control
on the control unit.
Standard
for the chain drive. Sprockets of 13, 15, 17,
3W’
pitch chain is recommended
19
and 25 teeth are available as standard
accessories. Bore and
keyway
dimensions for
the drive unit sprocket are detailed in Fig. 4. If
sprockets other than those supplied by
Nautech are fitted, it is essential that bore and
keyway
dimensions specified in Fig. 4 are
strictly adhered to. The recommended driven
sprockets tabulated In Fig. 8 are common
standard sizes and should be obtainable from
local suppliers of chain drive equipment. All
sprockets must be “keyed” and grub screwed
to their shafts, and finally secured with ‘Loctite’.
The drive unit is mounted by bolting to a
substantial frame member (Fig. 5). The
‘1
shaped mounting foot is secured by four
19mm
(0.75”)
9 46-9 61 mm
(0.3725”-0.3765”l
Fig. 4
LJ
/
GRUB SCREW
/
127mm
(0.5”)
Page 11

Rrovision
must also be
r;;ade
for chain
adjustment, which is most easily achieved by
removable shims placed under the mounting
foot, or by elongated clearance holes in the
mounting frame as illustrated in Fig. 6. Both
sprockets must be accurately aligned to run in
the same plane, and this must be carefully
checked by means of a straight-edge.
The grease lubricated gearbox permits
mounting of the drive unit in any convenient
attitude without risk of oil leakage. The drive
unit’s sprocket may also face any direction,
since steering sense can be corrected by
means of a phase switch located in the control
unit.
Finally, the chain should be tensioned until
it is ‘just’ tight and contributes negligible lost
motion to the drive system. Total lost motion
between the driven sprocket attached to the
steering system and the rudder stock should
not exceed 2% of total movement. If lost motion
exceeds this level, it should be corrected,
otherwise steering performance will be
impaired.
HARDOVER-HARDOVER
TIME RECOMMENDATIONS
40
1
.-
.,
FFFT
Fig. 8
Fig. 7
Page 12

-.
2.2.2 LINEAR DRIVE UNIT
The linear drive unit couples directly to the
rudder stock at the tiller arm length
recommended in Fig. 9. It is usually
preferable to couple the linear drive unit to the
rudder stock via an independent tiller arm
(Edson
offer a standard fitting). In certain cases,
however, it may be possible to couple the
pushrod to the same tiller arm or rudder
quadrant employed by the main steering
linkage. It is important to note that the linear
drive system can exert a thrust of 550lbs. If any
doubt exists about the strength of the existing
tiller arm or rudder quadrant the steering gear
manufacturer must be consulted.
The method of bolting the pushrod ball end
to the tiller arm or rudder quadrant is illustrated
in Fig. 11. It is vitally important that the
coupling bolt is fully tightened and the nut
locked by means of the locking tab provided.
The standard ball end fitting will allow for a
maximum angular misalignment between the
pushrod and the tiller crank plane of rotation of
up to 5”. Accurate angular alignment is
extremely important and under no
circumstances should the above extreme limits
be exceeded. The body of the drive unit is
mounted by bolting to a substantial frame
member (Fig. 10). As a general rule it is
desirable to ‘over engineer’ the linear drive
unit’s mounting structure to ensure reliability
and maintenance of correct alignment. An
excessively
fletibk
mount can also severely
impair the steering performance of the
autopilot.
It is important to ensure that the total rudder
movement is limited by the rudder stops built
into the vessel rather than the end stops of the
linear drive output.
INS CM
‘*1’- ‘._ .,
lI: *;L.-.yy
5-
Fig. 9
LINEAR DRIVE
TILLER ARM LENGTHS
30
I
I 1
8
9
10
25
I
30
I
35
LOA
1
11
I
METRES
I
12 13
I
40
I
FEET
1 1
Page 13

2.2.3 HYDRAULIC DRIVE UNIT
The hydraulic drive unitshould be mounted
clear of spraj/ and the possibility of immersion
in water. It should be located as near as
possible to the hydraulic steering cylinder. It is
important to bolt the hydraulic drive unit
securely to a substantial member to avoid any
possibility of vibration that could damage the
inter-connecting pipework.
The drive amplifier (Fig. 13) should be
mounted between the drive unit and the power
supply (batteries) in order to minimise the total
length of power cable. It should also be
mounted in a position clear of bilge water and
spray. The drive amplifier is mounted by first
removing the cover marked ‘Autohelm’ and
bolting or screwing to a suitable vertical
bulkhead through the four holes in the
(Fig. 14).
There are three basic types of hydraulic
steering system (Fig. 12). Typical connection
points for the drive unit are shown in each case.
In all cases it is strongly recommended that
the steering gear manufacturer be
consulted. The drive unit valve block is tapped
l/4” BSP
to accept suitable pipe fittings and
Dowty sealing washers are supplied (Fig. 15).
.base
222mm (8
Fig. 13 Drive Amplifier
CONTROL UNIT
COiVfylECTlON SOCKET
8
7”)
POWER SUPPLY CABLE
*
fve
I
-ve
Two Line System
Two Line
Pressurised System
-RESERVOIR LINE
PRESSURISED
I
EARTHING TERMINAL CONNECTION
Fig. 14 Drive Amplifier Wiring Diagram
DRIVE UNIT
.
Three Line System
RESERVOIR LINE
Fig.
12
w
Page 14

Minimisation of hydraulic fluid loss during
connection of the drive unit will help to reduce.
the time and effort required later to bleed the
system of trapped air. Absolute cleanliness is
essential since even the smallest particle of
foreign matter could interfere with the correct
function of precision check valves in the
steering system.
When the installation has been completed
the hydraulic pump may be operated by
switching the control unit to Duty and operating
the Steer control. Greater motor movements will
be obtained if the gain control on the course
computer is set to No. 10 and the rudder
control set to maximum.
The hydraulic steering system should be
bled according to the manufacturer’s
instructions. From time to time during the
bleeding process the drive unit should be run
in both directions to clear trapped air from the
pump and inter-connecting pipe work.
If air is left in the system the steering will
feel spongy particularly when the wheel is
rotated to the hardover position. Trapped air will
severely impair correct operation of the
autopilot and the steering system and must be
removed.
During the installation of the system it has
not been necessary to keep track of the
connection sense to the hydraulic steering
circuit since operating sense of the autopilot
can be corrected if necessary by reversing the
polarity of*
pump
drive motor connections
(see section 3.3.1).
To check correct phasing of
the_autopilot,
switch to Duty and rotate the Steer control
clockwise. If phasing is correct starboard
rudder movement will result. If opposite rudder
movement occurs, reverse the phase switch
direction to correct as described in Section 3.2.
The gain control located on the back of the
Control, Unit sets the rudder response of the
autopilot to match the particular installation.
The recommended gain control setting is given
in Fig. 16.
CONNECTION OF
HYDRAULIC LINES TO PUMP
DOWTY SEAL
’
BSP FITTING
Assembly for W’ BSP Line Fitting
Fig. 15
ii3
50b
#=%I
Assembly for
IN3
30-
DOWTY SEAL
-
I
‘h” NPT FllTlNG
l/d’
NPT Line Fitting
RECOMMENDED GAI
CONTROL SETTINGS
1
5-
O-
1
_#”
__.ii.
N
Fig. 16
15
/
I
I
I
1
2 3
GAIN CONTROL AVERAGE SE-tllNG
II
4 5
”
6 7
11
8 910
1
13
Page 15

2.3 CABLING AND POWER SUPPLIES
2.3.1 SIGNAL CABLING
Cable inter-connections between system subunits are shown schematically in Figs. 1, 2, and
3. The interconnecting multi-core cable
between the control unit and drive unit is 20
feet (6m) long, and is supplied with the control
unit. All other interconnecting cables are
supplied with their related sub-unit and are also
20feet (6m) in length. All 7 core cables are
supplied with pre-wired waterproof connectors
and are extendable in 20 feet (6m) increments
by the addition of standard cable extensions
(Cat. No. 059) as shown in Fig. 3.
Cable connector clamp nuts should be
securely tightened to ensure watertight joints.
All cables should be run at least 3ft (1 m) from
existing cables carrying radio frequency or
pulsed signals, and should be clamped at 1.5
foot (05m) intervals.
2.3.2 DC SUPPLY CABLE
As a general rule the DC supply cable to the
drive unit should be kept as short as possible,
and have a conductor area of 1 .O sq.mm per
metre run to minimise voltage drop.
Example:
Length of cable Conductor area Cable size
Up to
2.5m
Upti4m
The two supply cables must run directly from
the vessel’s battery or alternatively from the
main distribution panel, and a 20 amp fuse or
overload trip should be included in the circuit.
It is important not to tap into supplies to other
into supplies to other equipment to avoid the
possibility of mutual interference.
The drive unit is supplied with
power supply cable tails. These should be
connected to the main power supply cable via
a heavy-duty terminal block. The red cable tail
should be connected to the positive supply and
the black cable to the negative supply. If
polarity is accidentally reversed the equipment
will not operate, but no damage will result.
The drive unit case must be bonded to the
metal hull or engine frame and a heavy duty
conductor (2.5mm2) should be used for this
purpose.
2.5 sq.mm 50/0.25mm
4
scpnm
56/0.3mm
1.5ft (0.5m)
14
Page 16

3.0 OPERATION
3.1 BASIC PRINCIPLES
The following description of the Autohelm 5000
principle of operation will help in providing a
complete understanding of its controls. The
control unit houses an extremely sensitive
setting electronic compass. When the autopilot
is in operation, deviation from course is
continuously monitored by the compass and
corrective rudder is applied by the drive unit to
return the vessel to course. The amount of
applied rudder is proportional to the course
error at any time, and thus when the original
course is restored the rudder will be
neutralised. The amount of the rudder applied
for a given off-course error is adjustable to
match both the steering characteristics of the
vessel and speed through the water. A vessel
with a small rudder for example, will require
more corrective helm than a similar sized vessel
with a larger rudder. Similarly, a high speed
power boat will require considerably less
corrective helm at planing speeds than it will at
lower displacement speeds (Fig.1 8.)
The characteristic which distinguishes the
Autohelm 5000 is its ability to make automatic
correction for changes in trim or weather helm.
When changes in trim occur the set course can
only be maintained by the application of
permanent rudder offset to restore balance.
Many automatic pilots are incapable of this and
will allow the vessel to bear on to a new
heading to achieve a new state of balance.
Under these circumstances the Autoheim 5000
detects that the original course has not been
restored and will continue to apply additional
helm in the appropriate direction until the
vessel returns to the original heading. This
facility ensures that the originally set course is
held irrespective of changes in balance that
may occur during the course of a passage.
3.2 CONTROLS
3.2.1 CONTROL UNIT
Fig.1 .I shows the position of all controls. Each
control has the following functions:
OFF
Push to de-energise the autopilot. The electro-
magnetic clutch in the drive unit is disengaged
for manual steering.
auto-
DUTY
Push to fully energise the autopilot for
automatic steering duty.
REMOTE
Push to transfer basic automatic pilot control to
the auxiliary control unit.
SEA
Rotate to adjust compass sensitivity to suit sea
conditions. In position ‘0’ the compass is fully
sensitised for operation in calm sea conditions.
Clockwise rotation to position ‘7’ progressively
densensitises the compass for operation in
rough sea conditions. Adjustment of this
important control is fully discussed later.
RUDDER
Rotate to adjust rudder response. In position ‘0’
rudder movement is minimised. Clockwise
rotation to position ‘7’ progressively increases
the amount of applied rudder. Adjustment
technique is fully discussed later.
STEER
Rotate counter-clockwise or clockwise to alter
course to port or starboard respectively. Each
scale division represents 5 degrees of course
alteration. The steer control will rotate
automatically when the control unit is switched
to
Set.
The controls on the rear case are used to
adjust the auto-pilot’s response to suit the
particular installation and the vessel’s steering
characteristics.
Each control has the following functions:
GAIN
Presets the overall system gain to compensate
for variations in the mechanical reduction
between the drive unit and the rudder and the
vessel’s steering characteristics. For initial sea
trial purposes this control is set according to
the recommendations given in Fig.1 8.
PHASE SWITCH
The phase switch is located on the internal
PCB and is accessible by removal of a blank
rubber grommet from the rear case. The phase
switch reverses the direction of corrective
rudder action and its setting procedure is
described later.
SET
Push to energise the compass circuit and
initiate the automatic compass setting
sequence. The compass is finally set to the
manually steered heading when both the red
and green pilot lights are extinguished.
NB Recommended gain control settings for
hydraulic drive installations are given in
the hydraulic drive unit instructions.
Page 17

RECOMMENDED GAIN
CONTROL SETTINGS
GAIN
CONTROL
Fig. 17
DRIVE UNIT AUXILIARY
SOCKET
PHASE SWITCH
CONTROL SOCKET
3.2.2 AUXILIARY CONTROL UNIT
Autopilot control may be transferred to the
auxiliary control unit (Fig.1 9) by depressing the
Remote push-button on the main control unit
facia.
Two independent rotary switches are
provided on the auxiliary control unit. The first
permits Mange-over betweenSet and Duty
modes. The second control permits remote
alteration of heading. Switch movement to the
left or right initiates course alteration to port or
starboard respectively at approximately one
degree per second.
Fig. 18
l-l
7 8
”
/ I
I
25
I
‘,_
,,. _s.,
I
9 10
I
30
.
I I
11
I
35 40
LOA
I
12
I
METRES
1
13
I
FEET
3.2.3 REMOTE CONTROL UNIT
The hand-held remote control unit
enables the autopilot to be switched out and
the vessel to be power steered from anywhere
on board. Its flying lead may be plugged into
any one of the remotely positioned waterproof
sockets and should be switched to Auto for
normal automatic steering operation. The
autopilot may be overriden by switching to
Manual and the vessel then power steered by
means of the control wheel. The automatic trim
system continues to operate in the manual
steering mode and a straight course will be
steered when the ‘boat’ on the control wheel is
aligned with the remote control centre line. The
original course is remembered and will be
resumed immediately the change-over switch is
returned to Auto. If the vessel has been power
steered by the remote control for a long period
it is important to check that there is no chance
of collision when the original automatic
heading is acquired by switching back to Auto.
16
(Fig.20)
Fig.
Fig.
26
19
.CONTROL
WHEEL
Page 18

4.0 FUNCTIONAL TEST PROCEDURES
The following functional test procedure is
recommended before attempting sea trials.
4.1 MAIN CONTROL UNIT
0
Switch to Set and observe that the compass
automatically sets to the present heading.
The Steer control will rotate while the
compass is setting and slow down as the
null position is approached. When the
compass is finally set both pilot lights will be
extinguished.
0
Switch to Duty and check that the drive unit
clutch is engaged by attempting to rotate
the steering wheel.
0
Adjust the Sea and Rudder controls to ‘0’.
Then adjust the Steer control one or two
divisions clockwise and then counterclockwise. The steering wheel should rotate
in the same direction as the Steer control. If
opposite wheel rotation occurs, reverse the
phase switch. (A small screwdriver will be
required to operate the phase switch after
removal of the blank rubber grommet from
the rear case).
0
Increase Rudder control setting and note
that larger wheel movements result when the
Steer control is adjusted.
.*
Increase theSea control setting and note
that larger movements of the Steer control
are necessary in either direction
steering wheei movement commences.
b.efore
4.2 AUXILIARY CONTROL UNIT
0 Switch the auxiliary control unit to Set and
then depress Remote on the main control
unit. In this position the compass
automatically sets to the present heading.
0 Switch the auxiliary control unit to Duty and
check that.the drive unit clutch is engaged
by attempting to rotate the steering wheel.
4.3 MECHANICAL TEST
PROCEDURES
Before attempting sea trials it is important to
verify that the vital link between the Autohelm
5000 drive actuator and the vessel’s steering
system is free of obstruction and operating
correctly.
It is strongly advised that the following
simple checks are carried out.
Warning
When the steering system is being moved
manually or under drive from the actuator do
not touch any part of the system, sprockets,
chains or limit stops. The forces exerted are
considerable and could cause injury.
Rotary Drive Unit
Locate the actuator and with an assistant to
turn the main steering wheel switch on the pilot.
0 Press Set - turn the steering wheel from
hardover to hardover.
’
The automatic trimming capability of the 0 Ensure that the chain and sprockets driving
autopilot can be observed by the following test:
Switch to Set to realign the compass. Then
switch to Duty and offset the Steer control by
approximately two divisions i.e. approximately
10 degrees of heading change. This effectively
simulates a condition where the need for
standing helm has developed and the vessel is
not returning to course. You will notice that after
an initial fixed helm has been applied the drive
unit continues to apply further helm movements,
but at a much slower rate. If left in this condition
the wheel will eventually rotate hardover. If,
however, the vessel is moving through the water
the progressive application of additional helm
will eventually return the vessel to its original
course with the necessary standing helm
applied. This can be simulated by rotating the
steer control back to the original course
position. The progressive application of
standing helm will cease when the compass
senses that the original course has been
restored.
the actuator move freely and in alignment.
0 Ensure that chain tension is adjusted
correctly (see 2.2.1)
0 Select Duty and rotate the Rudder control
several turns to the right to drive the rudder
hardover.
0 When the actuator drives the rudder onto the
mechanical limit stops ensure that the
mounting of the drive actuator shows no
sign of movement.
0 Rotate the Rudder control in the opposite
direction to reverse the rudder drive to the
opposite end stop. Check for any movement.
Page 19

Linear Drive Unit
0 Proceed as for rotary drive unit.
Hydraulic System
0 Proceed as for the rotary drive unit.
0 Check that at no point during movement of
the steering quadrant and linear drive
actuator from hardover to hardover does the
actuator foul any part of the quadrant,
steering mechanism or yachts structure. Any
fouling under load could damage the drive
actuator.
0 Check that the Drive actuator operates
horizontally and that angular movement of
the ball end fitting is minimal
(So
maximum).
0 Select Duty and rotate the Rudder control
several times to drive the rudder hardover.
0
When the rudder is driven hardover check
that the mechanical limit stop on the
vessel’s steering system is reached before
the actuator reaches its mechanical limit.
0
When the rudder drives hard against the end
stop check there is no visible movement of
the actuator mounting pedestal or the
structure supporting it.
0 Rotate the Rudder control in the opposite
direction and repeat the checks with the
rudder driven hardover
inthe
opposite
direction.
l Check that all unions are tight and there is
no seepage of hydraulic fluid.
l Select Duty and rotate the Rudder control
several times to drive the rudder hardover.
l Rotate the Rudder control in the opposite
direction and drive the rudder hardover in
the opposite direction.
0 Check that the steering ram moves smoothly
and that there is no excessive play or
jerkiness in the movement.
The performance of the Autohelm 5000 will
only reach the designed levels if the installation
of the actuator and steering system is correctly
engineered and adjusted. It is strongly advised
that these be checked before sea trials.
Page 20

5.0 SEA TRIALS
Initial sea trials should be carried out in calm
conditions and with plenty of sea room. The
previously conducted functional test will have
verified that the autopilot is operating correctly
and that you are familiar with all of its controls.
Check that the gain control on the rear of
the control unit is adjusted to the setting
recommended for the particular vessel category
given in Fig. 3.1, Then set the Sea control to ‘0’
and the Rudder control to ‘4’.
Initial sea trials on fast planing vessels
should be conducted at no more than half
engine throttle under which conditions the
recommended mid-way setting of the rudder
control should give acceptable steering
performance. A mid-way setting of the rudder
control will also give acceptable steering
performance in sailing and displacement power
vessels under all conditions for initial trial
purposes. Fine setting of the Rudder control is
discussed later.
5.1 FIRST TRIALS
.The following initial trial procedure is
recommended:
0 Steer manually on to a fixed heading and
hold the course steady.
0
Switch the autopilot to Set and allow up to
1.5 seconds for the compass to adjust
automatically to the manually steered
:
heading.
0 Switch to Duty and the autopilot will
automatically take control. In calm
conditions an extremely constant heading
will be maintained.
0 Increase the setting of the Sea control until
a good heading is achieved with a minimum
number of wheel movements. Correct setting
of this control for varying sea conditions is
essential to avoid unnecessary wear and
tear on the autopilot and to minimise
electrical power consumption.
0 Alter course to port or starboard using the
Steer control on the main control unit, (or
the Left/Right control on the auxiliary
control unit with the main control unit
switched to Remote). Major course
alterations are best applied by switching to
Set and then manually steering the vessel
on to the new heading. When the new
course is acquired, hold for a few seconds
and then switch the autopilot back to Duty
to maintain the new heading.
0 If a hand-held remote control is fitted, switch
from Auto to Manual and then power steer
the vessel by the control wheel. Switch back
to Auto and the vessel will return promptly
to the original heading.
0 When the autopilot is set to Duty return to
manual steering may be instantly achieved
by switching to Set or Off on the main
control unit. It is very important to remember
that manual control can only be obtained on
the auxiliary control unit if the main control
unit is switched to Remote. The importance
of being able to regain manual control of
steering must-be stressed. The Off button is
coloured red for easy identification and
manual take-over procedures should be
practised at an early stage.
5.2 RUDDER CONTROL ADJUSTMENT
The gain control on the rear of the control unit
has been previously set according to the
recommendation given in Fig. 3.1. This control
sets the range of adjustment available on the
main panel Rudder control and in all but
extreme cases should not need further
adjustment.
In all cases, excessive rudder application
results in ‘oversteer’ which can be recognised
by the vessel swinging slowly from side to side
of the controlled heading. In addition, distinct
overshoot will be observed when the course is
changed. This extreme condition may be
corrected by reducing the Rudder control
setting.
Similarly, insufficient rudder application will
result in sluggish steering response which is
particularly apparent when changing course
using the Steer control. This condition is
corrected by increasing the Rudder control
setting.
Oversteering and understeering tendencies
are most easily recognised in calm sea
conditions where wave action does not mask
basic steering performance.
The operational adjustment technique for the
Rudder control varies significantly between
planing and displacement craft and is
described separately below.
5.2.1 PLANING
Planing craft operate over a very large speed
range. Rudder effectiveness increases very
significantly at higher hull speeds and it is thus
necessary to reduce the Rudder control setting
as speed increases to avoid oversteer. In
normal cases the rudder control setting would
be reduced almost to ‘0’ at maximum planing
speed and increased towards ‘7’ at minimum
displacement speeds. Oversteer can be
extremely violent at planing speeds and it is
thus essential to reduce the rudder setting
before opening the throttle.
CRAFT
,,
19
Page 21

5.2.2 DISPLACEMENT POWER
VESSELS
The Rudder control setting is much less critical
on this type of vessel and it is not normally
necessary to change the setting for different
engine speeds. As a general guide initial
testing should be carried out at setting ‘4’ and
reduced as much as possible ‘consistent with
good heading control to minimise wear and
tear on the steering ‘system.
5.2.3 SAILING CRAFT
Sailing craft average hull speeds do not vary
greatly and thus the Rudder control setting can
remain fixed most of the time. Initial testing
should be carried out at setting ‘4’. Sailing craft,
however, are particularly stable when sailing
close hauled and under these conditions it is
usually possible to reduce the Rudder control
setting to minimise rudder movement and
hence power consumption. Conversely, when
sailing down wind, directional stability is least,
and improved course holding will result from
increasing the rudder setting. The optimum
range of adjustment is easily found by
experiment.
._
. .
.
Page 22

6.0 OPERATING HINTS
Unlike sailing yachts, power vessels do not
generally suffer with violent changes in trim,
and thus, provided the operating instructions
are carefully followed, extremely good course
holding performance will result in all weather
conditions.
Sailing yachts are very different since in
gusting wind conditions violent changes in trim
often occur. When a yacht is sailing badly out
of balance, sudden gusts will generally cause it
to luff violently to windward. When hand
steering, the tendency is overcome by applying
sufficient weather helm to maintain the original
heading. The Autohelm 5000’s automatic
weather helm compensation circuit however, is
intended only to take account of the gradual
changes in standing helm that typically occur
when passage making due to changing wind
conditions.
When a sudden change in helm balance
occurs the automatic compensation circuit will
take approximately one minute to restore the
original heading. In gusty conditions the course
will tend to meander particularly if the sails are
badly balanced. Significant improvement to
course keeping can be obtained by ensuring
that sail balance is maintained.
Bear in mind the following important points.
It is also worth mentionina the more obvious
and that is that an autopilot cannot anticipate.
Sailing downwind in breaking seas needs
particular care.
One should avoid sailing under autopilot
when the
should be brought at least 30 degrees towards
the beam, and in breaking seas it is often better
to remove the mainsail altogether and to sail
under boomed out headsail alone.
Providing you ensure that your vessel is
properly canvassed for the prevailing
conditions, your Autohelm 5000 will be capable
to sailing you through gale force winds.
Moreover, it is at times like this that it will
endear itself most of all by leaving you fresh
and alert to sail in safety.
Passage making under automatic pilot is a
wonderful experience that can easily lead you
into the temptation of relaxing permanent
watch-keeping. This must be avoided however
clear the sea ahead may appear to be.
Remember, a large ship can cover two miles in
five minutes - just the time it takes to brew a
cup of coffee!
wi‘nd.is
dead astern. Ideally, the wind
: 0
00 notallow the yacht to heel
0 Ease the mainsheet traveller to leeward to
reduce heeling and weather helm.
0
If necessary reef the mainsail a little early.
excessive!y.
Page 23

7.0 ROUTINE MAINTENANCE
The autooilot is one of the most used and
hardest working items of equipment on board
and, therefore, must receive its fair share of
attention and routine maintenance. The working
parts of the drive unit and the control unit are
sealed and lubricated for life during manufacture
and do not need servicing
Regular inspection and routine maintenance
of the installation is recommended in the
following areas:
1 Check tension and alignment of the drive
chain and lubricate with a good quality
waterproof light grease.
2 Check for the development of excessive lost
motion (backlash) in the steering gear and
correct if necessary. Lost motion at the wheel
should not exceed 5% of the total wheel
movement from lock to lock.
3 Check that all inter-connecting cable sockets
are fully tightened and free from corrosion.
4 Check that external waterproof sockets are
capped when not in use and periodically
spray with
corrosion.
5 Check that the power supply cable
connections are tight and free from
corrosion.
The Autohelm 5000 has an advanced microelectronic circuit requiring special equipment
and knowledge to service. In the unlikely event
of failure occuring in any part of the system you
are advised to contact your nearest appointed
Service Agent who will provide you with
competent and efficient service.
WD40
(or similar) to protect from
..
Page 24

Nautech Limited, Anchorage Park, Portsmouth
Hampshire PO3
5TD,
England. Telephone
Fax (0705) 694642, Telex 86384 NAUTEC G
(0705)
693611
 Loading...
Loading...