

Page 1
DOPPLER DIRECTION
FINDER
RADIO DIRECTION FINDER
KIT
Ramsey Electronics Model No. DDF1
Get in on the fun of radio direction finding (RDF) with this super
kit ! The latest in affordable Doppler direction finding equipment
available in a complete kit form ..this one even includes the
receiving antenna. A must for the “fox hunter” at an unheard of
price!
• Elegant and cost effective design thanks to WA2EBY ! Featured in
May / June 1999 QST Articles.
• Solid state antenna switching for “rock solid” performance.
• Convenient LED 22.5 degree bearing indicator.
• Audio Level indicator for trouble free operation.
• Adjustable damping rate, phase inversion, scan enable / disable.
• Complete with home brew “mag mount” antennas and cable,
designed for quick set up and operation.
• Utilizes latest high speed CMOS technology for signal conditioning
and audio processing!
• Complete and informative instructions guide you to a kit that works
the first time, every time - enhances resale value, too !
DDF1 • 1
Page 2
RAMSEY TRANSMITTER KITS
• The “Cube” MicroStation Transmitter
• FM25B Synthesized FM Stereo Transmitter
• FM100B “Professional Quality” Stereo FM Transmitter
• AM1, AM25 AM Transmitters
RAMSEY RECEIVER KITS
• FR1 FM Broadcast Receiver
• AR1 Aircraft Band Receiver
• SR1 Shortwave Receiver
• AA7 Active Antenna
• SC1 Shortwave Converter
RAMSEY HOBBY KITS
• SG7 Personal Speed Radar
• SS70A Speech Scrambler
• MX Series High Performance Mixer
• MD3 Microwave Motion Detector
• PICPRO Pic Chip Programmer
• LC1 Inductance-Capacitance Meter
RAMSEY AMATEUR RADIO KITS
• DDF1 Doppler Direction Finder
• HR Series HF All Mode Receivers
• QRP Series HF CW Transmitters
• CW7 CW Keyer
• CPO3 Code Practice Oscillator
• QRP Power Amplifiers
RAMSEY MINI-KITS
Many other kits are available for hobby, school, Scouts and just plain FUN. New
kits are always under development. Write or call for our free Ramsey catalog.
DDF1 DOPPLER RADIO DIRECTION FINDER KIT INSTRUCTION MANUAL
Ramsey Electronics publication No. MDDF1 Revision 1.2
COPYRIGHT
14564. All rights reserved. No portion of this publication may be copied or duplicated without the
written permission of Ramsey Electronics, Inc. Printed in the United States of America.
1998 by Ramsey Electronics, Inc. 590 Fishers Station Drive, Victor, New York
First printing: May, 1999
DDF1 • 2
Page 3
Ramsey Publication No. MDDF1
Price $5.00
INSTRUCTION MANUAL FOR
DOPPLER RADIO
DIRECTION FINDER
TABLE OF CONTENTS
Introduction to the DDF1 ............... 4
DDF1 Circuit Description .............. 4
Parts List ...................................... 11
DDF1 Assembly Steps ................. 14
Component Layout ....................... 17
Schematic Diagram ...................... 18
Initial Testing ................................ 22
Ramsey Warranty ........................ 23
DDF1 • 3
RAMSEY ELECTRONICS, INC.
590 Fishers Station Drive
Victor, New York 14564
Phone (585) 924-4560
Fax (585) 924-4555
www.ramseykits.com
Page 4
INTRODUCTION
Radio direction finding is a fascinating hobby that has been becoming more
and more popular in today's portable world. More recently, Doppler “df-ing”
has become the rage, with a display that gives you a direct bearing on the location of the transmitter. Pretty neat trick considering you don’t need multiple
separate receivers at different locations to triangulate on the mystery transmitter.
DDF1 CIRCUIT DESCRIPTION
The classic example of the Doppler effect is that of a car approaching a stationary observer. The car's horn sounds higher in pitch (frequency) to an observer as the car approaches. The change in frequency occurs because the
motion of the car shortens the wavelength. The horn sounds lower in pitch
(frequency) to the observer as the car speeds away. This occurs because the
car is speeding away from the observer effectively increasing the wavelength. Fewer cycles per second, hence, lower-frequency sound. A similar
effect occurs when an antenna is moved toward or away from a transmitting
source. The signal received from an antenna moving toward the transmitting
source appears to be at a higher frequency than that of the actual transmission. The signal received from an antenna moving away from the source of
transmission appears to be lower in frequency than that of the actual transmission. Imagine a receiving antenna moving in a circular pattern as pictured in Figure 1A. Consider the antenna at position A, nearest the source of
transmission. The frequency of the received signal at point A equals that of
the transmitted signal because the antenna is not moving toward or away
from the source of transmission. The frequency of the received signal decreases as the antenna moves from point A to point B and from point B to
point C. Maximum frequency deviation occurs as the antenna passes
through point B. The frequency of the received signal at point C is the same
as that of the transmitted signal (no shift) because the antenna is not moving
toward or away from the source of transmission. As the antenna moves from
point C to point D and from point D back to point A, the frequency of the received signal increases. Maximum frequency deviation occurs again as the
antenna passes through point D. The Doppler frequency shift as a function
of antenna rotation is illustrated in Figure 1B.
dF= (
rf
)/c
c
where:
dF =Peak change in frequency (Doppler shift in Hertz)
= Angular velocity of rotation in radians per second (2 x frequency of ro-
tation)
r = Radius of antenna rotation (meters)
f
= Frequency of transmitted signal (Hertz)
c
DDF1 • 4
Page 5

c = Speed of light
We can calculate how fast the antenna must rotate in order to produce a
given Doppler frequency shift with the following equation
fr = dF x 1879.8/R x f
c
where
fr = The frequency of the received signal in megahertz
dF= The Doppler shift in Hertz
R = Radius of antenna rotation in inches
f
= Carrier frequency of the received signal in megahertz
c
As an example, let's calculate how fast the antenna must rotate in order to
produce a Doppler shift of 500 Hz at 146 MHz, assuming the antenna is turning in a circle with radius 13.39 inches.
RF Signal (fo)
Figure 1
D
Rotation
C
+ f
f o
- f
B
A
(A)
(B)
DDF1 • 5
Page 6

The frequency of rotation is:
fr = 500 x 1879.8/146 x 13.39
A rotation frequency of 480 Hz translates to 480 x 60 = 28,800 or almost
30,000 r/min, which pretty much rules out any ideas of mechanically rotating
the antenna! Fortunately, Terrence Rogers, WA4BVY, proposed a clever
method of electrically spinning the antenna that works very well. Roger's pro-
ject, the DoppleScAnt, uses eight 1/4pattern. Only one antenna at a time is electrically selected. By controlling the
order in which the antennas are selected, the DoppleScAnt emulates a single 1/4 –
sign is the use of a digital audio filter to extract the Doppler tone from voice,
PL tones and noise.
The DDF1 design offers slightly improved audio filtering, 74HC-series logic
circuits capable of driving the LED display directly, a wideband VHF/UHF an-
tenna switcher and the four 1/4about one third the cost of purchasing a commercial RDF unit - and building
the project is a lot more educational.
HOW IT WORKS
To understand the operation of the Doppler RDF circuit, see the block diagram of Figure 2. An 8 kHz clock oscillator drives a binary counter. The output of the counter performs three synchronized functions: "spin" the antenna,
drive the LED display and run the digital filter. The counter output drives a 1
of 4 multiplexer that spins the antennas by sequentially selecting (turning on)
one at a time in the order A,B,C,D,A, etc., at 500 times per second. The
counter output also drives a 1 of 6 multiplexer used to drive the LED display
in sync with the spinning antenna. The RF signal received from the spinning
antenna is connected to the antenna input of a VHF or UHF FM receiver.
The spinning antenna imposes a 500 Hz frequency deviation on a 146 MHz
received signal. A 146 MHz FM receiver connected to the spinning antenna's RF output demodulates the 500 Hz frequency deviation and sounds
like a 500 Hz tone with loudness set by the 500 Hz frequency deviation. The
receiver audio, including 500 Hz Doppler tone, is processed by a series of
audio filters. A high pass filter rejects PL tones and audio frequencies below
the 500 Hz Doppler tone. A low-pass filter rejects all audio frequencies
above the 500 Hz Doppler tone, and a very narrow bandwidth digital filter extracts only 500 HZ Doppler tone.
The output of the digital filter represents the actual Doppler frequency shift
whip antenna moving in a circle. A clever feature in Roger's de-
vertical whips arranged in a circular
mag-mount antennas. Total project cost is
DDF1 • 6
Page 7
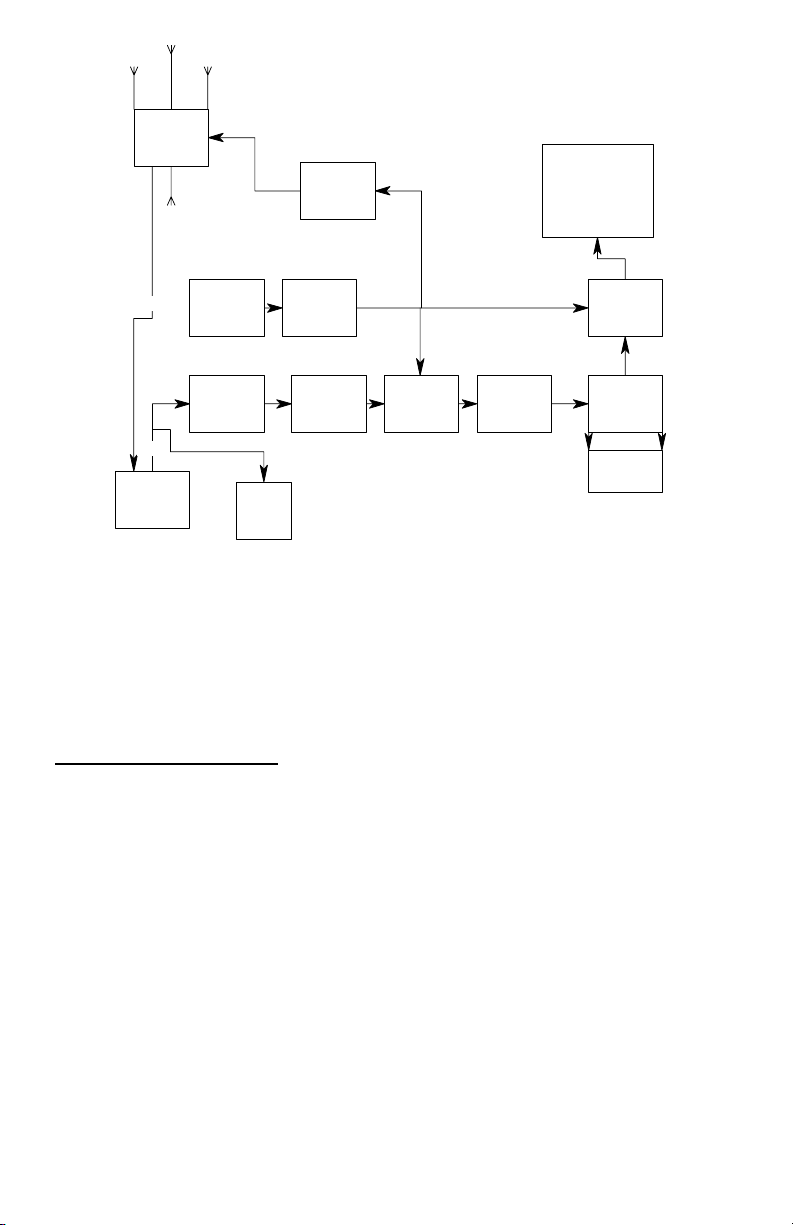
Antenna
Switcher
Figure 2 Block Di agram of the WA2EBY Doppler RDF System
Ant
AF Out
FM Receiver
1 of 4 Data
Select or
8 KHz Clock Binary Counter
High Pass
Filter
Extern al
Speaker
Low Pass
Filter
Digi tal Fi lter
Zero Crossi ng
Detec tor
LED Compass Display
1 of 16 Data
Selec tor
Adjustabl e
Dela y
R 36
Cali brate
Latch
shown in figure 1. - Zero crossings of the Doppler frequency shift pattern correspond to the antenna position located directly toward the source of transmission (position A) or directly opposite the source of transmission (position
C). The zero-crossing signal passes through an adjustable delay before it
latches the direction indicating LED. The adjustable delay is used to calibrate
the LED direction indicator with the actual direction of the transmission.
CIRCUIT DESCRIPTION
Take a look at the schematic of the WA2EBY Doppler RDF on page 18. The
heart of the system is an 8 kHz clock oscillator built around a 555 timer, U4,
configured as an astable multivibrator. C26, R27, and R28, R29 determine
the multivibrator's oscillation frequency. R27 and R28 are series connected
to allow fine tuning the oscillation frequency to 8 kHz. It is important that the
clock frequency be exactly 8 kHz; I recommend that it be adjusted to
+/-250 Hz of that frequency for reasons that I'll discuss shortly. The 8 kHz
output of U4 provides the clock for 4 bit binary counter U7. The 3 bit binary
coded decimal (BCD) output of U7 is used to operate three synchronized
functions.
DDF1 • 7
Page 8

Three Synchronized Functions
The first function derived from binary counter U7 is antenna array spinning.
This is accomplished by using the two most significant bits of U7 to run 1 of 4
multiplexer U8. The selected output of U8 (active low) is inverted by buffer
U12. The buffered output of U12 (active high) supplies current sufficient to
turn on the antenna to which it is connected. (The details of how this is done
will be covered later.) Buffer outputs U12A, U12B, U12C and U12D are sequenced in order. The corresponding buffer selects antennas A,B,C,D,A,B,
etc. Driving multiplexer U8 with the two most significant bits of counter U7 divides the 8 kHz clock by four, so each antenna is turned on for 0.5 ms. One
complete spin of the antenna requires 0.5 ms x 4 = 2.0 ms, thus the frequency of rotation is 2 ms or 500 Hz. An FM receiver connected to the spinning antenna's RF output has a 500 Hz tone imposed on the received signal.
Sequencing the 16 LED display is the second synchronized function from binary counter U7. This is done by using the binary output of counter U7 to select 1 of 16 data outputs of U11. The selected output of U11 goes low, allowing current to flow from the +5 V supply through current limiting resistor R51,
green center LED D16, and direction indicating red LED's D17 through D32.
Each antenna remains turned on as the LED display sequences through four
direction indicating LED's, then switches to the next antenna. Each direction
indicating LED represents a heading change of 22.5 degrees.
The third synchronized function is operating the digital filter responsible for
extracting the Doppler tone. The 500 Hz Doppler tone present on the receiver audio output is connected to an external speaker and audio level adjust potentiometer R50. The signal is filtered by a two-pole Sallen Key high
pass filter built around op amp U1A. It filters out PL tones and audio frequencies below the 500 Hz Doppler tone. Next, a four-pole Sallen-Key low pass
filter using U1B and U1C band limits audio frequencies above the 500 Hz
Doppler tone. The band limited signal is then applied to the input of a digital
filter consisting of analog multiplexer U5, R18, R19 and C10 through C17.
(Readers interested in the detailed operation and analysis of this fascinating
digital filter are encouraged to review QEX magazine for June 1999)
The Digital Filter
Using the three most significant bits of U7 to drive the digital filter divides the
8 kHz clock by the two, making the digital filter code rate 4 kHz. The center
frequency of the digital filter is determined solely by the clock frequency divided by the order of the filter. This is an 8th order filter, which makes the
center frequency of the filter 4 kHz/8 =500 Hz. This is the exact frequency at
which the antenna spins, hence, the same frequency of the Doppler tone
produced on the receiver audio connected to the spinning antenna. This is
DDF1 • 8
Page 9

truly an elegant feature of the Doppler RDF design. Using the same clock oscillator to spin the antenna and clock the digital filter ensures the Doppler
tone produced by the spinning process is precisely the center frequency of
the digital filter. Even if the clock oscillator frequency drifts, the Doppler tone
drifts accordingly, but the center frequency of the digital filter follows it precisely because the same clock runs it. Excessive drift in the 8 kHz clock
should be avoided, however, because the analog high and low pass filters
that precede the digital filter have fixed passband centers of 500 Hz. A drift
of +250 Hz on the 8 kHz clock corresponds to +62.5 Hz (250/4) drift in the
Doppler tone produced. This value is acceptable because of the relatively
low Q of the analog bandpass filter.
Digital filter Q is calculated by dividing the filter's center frequency by its
bandwidth (Q=f/BW) or 500 Hz/4 Hz=125. It's very difficult to realize such a
high Q filter with active or passive analog filters and even more difficult to
maintain a precise center frequency. The slightest change in temperature or
component tolerance would easily de-Q or detune such filters from the desired 500 Hz Doppler tone frequency. The digital filter makes the high Q possible and does so without the need for precision tolerance components. By
varying damping pot R19, the response time of the digital filter is changed.
This digital filter damping helps average rapid Doppler tone changes caused
by multipath reflected signals, noise or high audio peaks associated with
speech. A digitized representation of the Doppler tone is provided at the digital filter output. A two pole Sallen Key low pass filter built around U2B filters
out the digital steps in the waveform providing a near sinusoidal output corresponding to the Doppler shift illustrated in Figure 1B. The zero crossings of
this signal indicate exactly when the Doppler effect is zero. Zero crossings
are detected by U2C and used to fire a monostable multivibrator (U6) built
around a 555 timer. U6's output latches the red LED in the display corresponding to the direction of transmission with respect to the green center
LED, D16. Calibration between the actual source of transmission and the red
direction indicating LED latched in the display is easily accomplished by
changing the delay between the Doppler tone zero crossing (firing of U6) and
the generation of the latch pulse to U11. C23, R36 and R37 determine this
delay. Increasing or decreasing the delay is achieved by increasing or decreasing the value of the calibrate potentiometer R36.
Low Signal Level and Audio Overload Indicators
Two useful modifications included in this design are the low signal level lockout and audio overload indicators. U2D continuously monitors the amplitude
of the Doppler tone at the input to the zero crossing detector. U2D’s output
goes low whenever the Doppler tone amplitude drops below 0.11 V peak.
This is done by referencing the negative input of U2D to 2.39 V, 0.11 V below the nominal 2.5 VDC reference level output of U2B by means of voltage
DDF1 • 9
Page 10
divider, R21 and R22. U2D's output remains high when the Doppler tone is
present and above 0.11 V peak. C9 discharges via D2 whenever U2D goes
low, causing U3's output (pin 7) to go high, turning on Q2 via R24 and illuminating low signal level LED, D4. D4 remains on until the Doppler tone returns
with amplitude above 0.11 V peak and C9 recharges via R23. The LED display remains locked by disabling U11's strobe input whenever the Doppler
tone is too low for an accurate bearing. This is done by pulling pin 1 of U11
low via D5 when Q2 is turned on.
Audio overload indicator D3 tells you that audio clipping of the Doppler tone
is occurring. Clipping results if the signal level from the digital filter is too high
and can produce an erroneous bearing indication. The output of U1D goes
low whenever the output of the digital filter drops below 0.6 V as the amplitude of the Doppler tone approaches the 0V supply rail. C7 discharges via
D1 and causes the output of U3C to go high, turning on Q1 via R16 and illuminating audio overload LED D3. We elected not to lock the LED display on
audio overload; doing so, however, only requires connecting a diode between the collector of Q1 and pin 1 of U11, similar to the low level lock out
function.
Phase Correction
If the audio output of the Doppler RDF FM receiver is incorrectly phased, S3,
phase invert, can fix that. (If phasing is incorrect, LED direction indications
are 180 degrees opposite that of the actual signal source.) Moving S3 to the
opposite position corrects the problem by letting U2C sense the trailing edge.
This is particularly useful when switching between different receivers. S2 disables the 8 kHz clock to disable the antenna spinning. This helps when
you're trying to listen to the received signal. Presence of the Doppler tone in
the received audio makes it difficult to understand what is being said, especially with weak signals.
Power Supply
Power is delivered via on/off switch S1. D6 provides supply voltage reverse
polarity protection by limiting the reverse voltage to 0.7 V. U10 provides a
regulated 5 VDC to all digital ICs. C29 through C33 are bypass filters. U10's
5 VDC output is dropped 2.5 V by resistive divider R43 and R45. Noninverting voltage follower U3B buffers the 2.5 V source to provide a virtual
ground reference for all analog filters and the digital filter. Using a virtual
ground 2.5 V above circuit ground allows op amps to process analog signals
without the need of a negative power supply voltage. Analog voltages swing
from near 0 V to near +5 V with the virtual ground level right in the middle,
2.5 V.
DDF1 • 10
Page 11

DDF1 PARTS LIST
Sort and “check off” the components in the boxes provided. It’s also helpful
to sort the parts into separate containers (egg cartons do nicely) to avoid
confusion while assembling the kit. Leave the IC’s on their foil holder until
ready for installation.
RESISTORS AND POTENTIOMETERS
2 47 ohm (yellow-violet-black) [R42,51]
2 330 ohm (orange-orange-brown) [R17,25]
4 470 ohm (yellow-violet-brown) [R46,47,48,49]
1 3.3K ohm (orange-orange-red) [R14]
7 10K ohm (brown-black-orange) [R13,16,22,24,27,37,39]
1 18K ohm (brown-gray-orange) [R28]
2 22K ohm (red-red-orange) [R8,32]
1 27K ohm (red-violet-orange) [R4]
18 33K ohm (orange-orange-orange)
[R1,2,3,5,6,7,9,10,11,20,26,30,31,34,35,38,43,45]
1 56K ohm (green-blue-orange) [R12]
2 68K ohm (blue-gray-orange) [R29,33]
1 100K ohm (brown-black-yellow) [R18]
3 220K ohm (red-red-yellow) [R15,21,23]
1 PC mount 10K trimmer potentiometer (103) [R50]
2 PC mount 500K trimmer potentiometer (504) [R19,36]
CAPACITORS AND INDUCTORS
11 1000 pF disc capacitors (labeled .001 or 102) [DDF1 board
C22,24,26][ANTINT-1 board C1,2,3,4,5,6,7,8]
1 4700 pF disc capacitor (labeled .0047 or 472) [C23]
10 .01uF disc capacitors (labeled .01 or 103 or 10nF)
[C1,2,3,4,5,6,9,18,19,38
15 .1uF disc capacitors (labeled .1 or 104)
[C7,10,11,12,13,14,15,16,17,21,31,51,52,53,54]
1 .47 uF electrolytic capacitor (labeled .47) [C20]
3 1 uF electrolytic capacitor (labeled 1uF) [C8,25,32]
1 10 uF electrolytic capacitor (labeled 10uF) [C33]
2 100 uF electrolytic capacitors (labeled 100uF) [C29,30]
8 1.2 uH inductor (brown-red-gold) (ANTINT-1 board [L1,2,3,4],
ANTMTG-1 board, 1 ea.)
DDF1 • 11
Page 12

SEMICONDUCTORS AND INTEGRATED CIRCUITS
11 1N4148 small signal diode (small glass case with banded end)
[DDF1 board D1,2,5 ANTINT-1 board D1,2,3,4 ANTMTG-1 board 1 ea.]
1 IN4000 type power diode (black epoxy package with cathode band)
[typically 4001 to 4007] [D6]
18 Mini red LED (light emitting diode)
[D3,4,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32]
1 Mini green LED (light emitting diode) [D16]
2 NPN Transistors (Three leads marked 2N3904) [Q1,2]
1 7805 Voltage Regulator IC (marked 7805) [VR1]
1 74HC14 IC (14 pin DIP IC) [U12]...no, that doesn’t mean you or I are
a “DIP”...it stands for Dual Inline Package...see what happens when
you read the parts list!
1 74HC42 IC (16 pin DIP) [U8]
1 74HC161 IC (16 pin DIP IC) [U7]
1 74HC4051 IC (16 pin DIP IC) U5]
1 74HC4515 IC (24 pin DIP IC) [U11]
3 324 Op Amp IC (14 pin DIP marked 324) [U1,2,3]
2 555 Timer IC (8 pin DIP IC marked 555) [U4,6]
MISCELLANEOUS COMPONENTS
3 PC mount slide switch [S1,2,3]
1 PC mount mini jack [J3]
1 2.1 mm PC mount power jack [J1]
1 2 pin header (silver pins set in plastic) [J4]
1 DB 9 PC mount connector [J2]
1 DB 9 male connector
1 Miniature 8 ohm speaker
5’ RG-174 mini coaxial cable
1 “Clamshell” abs plastic case with pre-punched panel set
1 Panel sticker set
8 #4-40 x 1/4“ pc board mounting screws
6 #4 x 3/8” self tapping screws (case assembly)
2 6-32 x 3/8” PPH black screws
2 6-32 1/4” hex nuts
4 M3 x 10mm FHP screws
4 M3 kepnuts
4 Telescoping whip antennas
REQUIRED ITEMS (Not Supplied)
1 Length of RG58 cable for connecting between your radio and the
DDF1. (Not supplied due to unknown length required!)
DDF1 • 12
Page 13

RAMSEY Learn-As-You-Build KIT ASSEMBLY
There are numerous solder connections on the DDF1 printed circuit board.
Therefore, PLEASE take us seriously when we say that good soldering is essential to the proper operation of your direction finder!
• Use a 25-watt soldering pencil with a clean, sharp tip.
• Use only rosin-core solder intended for electronics use.
• Use bright lighting, a magnifying lamp or bench-style magnifier may
be helpful.
• Do your work in stages, taking breaks to check your work. Carefully
brush away wire cuttings so they don't lodge between solder connections.
We have a two-fold "strategy" for the order of the following kit assembly
steps. First, we install parts in physical relationship to each other, so there's
minimal chance of inserting wires into wrong holes. Second, whenever possible, we install in an order that fits our "Learn-As-You Build" Kit building philosophy. This entails describing the circuit that you are building, instead of
just blindly installing components. We hope that this will not only make assembly of our kits easier, but help you to understand the circuit you’re constructing.
For each part, our word "install" always means these steps:
1. Pick the correct part value to start with.
2. Insert it into the correct PC board location.
3. Orient it correctly, follow the PC board drawing and the written
directions for all parts - especially when there's a right way and a
wrong way to solder it in. (Diode bands, electrolytic capacitor polar
ity, transistor shapes, dotted or notched ends of IC's, and so forth.)
4. Solder all connections unless directed otherwise. Use enough
heat and solder flow for clean, shiny, completed connections.
5. Trim or “nip” the excess component lead wire after soldering.
Enough of that ... lets get started!
DDF1 • 13
Page 14

DDF1 DOPPLER DIRECTION FINDER ASSEMBLY STEPS
Although we know that you are anxious to complete the assembly of your direction finder finder kit, it will become necessary to assemble in a specific order to accomplish the final components installation of your unit. Try to avoid
the urge to “jump ahead” installing components. Please also note that the
components will mount on BOTH SIDES OF THE PRINTED CIRCUIT
BOARD for proper alignment into the provided case assembly.
Since you may appreciate some “warm-up” soldering practice as well as a
chance to put some “landmarks” on the PC board, we’ll first install some of
the larger mounting components. This will also help us to get aquainted with
the up - down, left - right orientation of the circuit board. Remember that the
majority of the components will be mounted on the “component “ side of the
circuit board and soldered on the “solder “ side of the circuit board, the side
with the printed circuit traces. Have a look at the component layout diagram
to help with your assembly.
1. Install J1, the 2.1 mm DC input connector. Notice that this mounts on
the “component side of the circuit board and the solder leads push
through the circuit board to protrude through the solder “pads” for connection. Be sure to push the part as close to the circuit board as it will
go, as the alignment of this part is important in getting the case holes to
line up with the part. Solder all three leads; don't be afraid to use enough
heat to flow the entire connection.
2. Identify and install J3, the miniature audio input jack. Gently “rock” the
component into place before soldering. Be sure to solder the mounting
“tabs” into place to provide for a secure fit.
3. In the same manner, identify and install J2, the DB 9 connector,
which will output the switching control voltage to the antenna switch. Be
sure that the connector fits snugly to the printed circuit board. Solder all
11 connections to the jack, being careful not to “bridge” solder between
the pins. Take your time here as a missed solder connection now can
cause an hour of troubleshooting at the completion of your kit.
There we go, now we’re on our way to getting this one put together! Double
check your connections, make sure that the jacks are resting snugly on the
circuit board, and let’s continue. We’ll get started working on the clock section of our circuit, using a 555 oscillator IC.
4. Moving towards the lower right of the main circuit board (component
side view), find the position for U4, one of the 555 timer IC’s. Install U4,
the 555 timer IC. Make sure to align the notch or dot associated with pin
one with the notch shown in the parts layout diagram. Also check to be
DDF1 • 14
Page 15

sure all 8 pins are through the board before soldering the IC in place.
This IC is responsible for the master clock oscillator for the direction
finder unit , and replaces a few dozen discreet components.
5. Install C24, .001uF disc capacitor (marked 102).
6. Install R29, 68K ohm (blue-gray-orange).
7. Install R28, 18K ohm (brown-gray-orange).
8. Install C26, .001uF disc capacitor (marked 102).
9. Install R27, 10K ohm (brown-black-orange).
10. Install R26, 33K ohm (orange-orange-orange).
11. Identify C25, the 1 uF electrolytic capacitor. Electrolytic capacitors
are polarized with a (+) and (-) lead and must be installed in the correct
orientation. Ordinarily, only the negative side is marked on the capacitor
body with a dark band and the (-) sign clearly shown, while the PC
boards will usually show the (+) hole location. Use care to ensure proper
polarity. See the parts diagram for proper placement. The capacitor
should fit snugly down to the PC board.
Now it’s time to build the power supply regulation portion of the circuit. We
need a well regulated low noise power supply to enable our circuit to work at
peak performance.
12. Identify VR1, the 7805 voltage regulator IC. Install as shown in the
diagram by carefully pre-bending the component leads at right angles to
the regulator IC. The component should fit flush to the printed circuit
board. Solder all three leads.
13. Install electrolytic capacitor C29, 100 uF. Again, this is an electrolytic
capacitor and must be mounted with respect to the correct polarity.
14. In the same manner, install C32, 1 uF electrolytic. Watch that polar-
ity!
15. Install C31, .1uF disc capacitor (marked 104).
16. Install R42, 47 ohm (yellow-violet-black).
17. Install C30, 100 uF electrolytic. Be sure to orient the polarity as
shown in the diagram.
18. Identify D6, the 1N4002 diode (epoxy case with a polarity “band” de-
DDF1 • 15
Page 16

noting the cathode (negative) side of the diode. Install as shown in the
parts placement diagram (D6 is adjacent to the power switch S1).
19. Moving again towards the lower right of the main circuit board
(component side view), find the position for U6, the other 555 timer IC.
Install U6, the 555 timer IC. Make sure to align the notch or dot associated with pin one with the notch shown in the parts layout diagram.
20. Install R34, 33K ohm (orange-orange-orange).
21. Install R35, 33K ohm (orange-orange-orange).
22. Install C21, .1uF disc capacitor (marked 104).
23. Install C23, .0047uF disc (marked .0047 or 472).
24. Install R37, 10K ohm (brown-black-orange).
25. Install C22, .001uF disc capacitor (marked 102).
Now that wasn’t so bad was it! You’ve just completed the power supply and
oscillator section of your direction finder. Pretty soon you will be searching
for fox transmitters in baby strollers at the mall!
Let’s get back to it. Next we’ll work on the digital filter section of the circuit.
Be sure to mount the components as close to the printed circuit board as
possible to provide for reliable operation.
26. Install C14,C17,C16,C15, all .1uF disc (marked 104). Now you're
starting to roll along.
27. In the same manner, install C10, C12, C11, and C13, again, all .1uf
(marked 104).
It is time to install some of the logic IC’s. Please note that although significant advances have been made in modern day CMOS technology, static
precautions should be observed while installing these IC’s. Be sure to orient
the IC band or notch as shown in the parts diagram for each IC. Try to focus
on the individual IC pin as you’re soldering and “walk” the iron to consecutive
pins of the IC as you continue.
28. Install U5, the 74HC4051 IC. Make sure not to “bridge” solder be-
tween the pins.
29. Install U8, the 74HC42 IC. Solder all 16 pins.
30. Install U12, the 74HC14 inverter IC.
31. Install U7, 74HC161 IC. Watch that orientation!
DDF1 • 16
Page 17

DDF-1 MAIN BOARD PARTS LAYOUT DIAGRAM
DDF1 • 17
Page 18

DDF1 • 18
Page 19

DDF1 • 19
Page 20

32. Install U11, the 24 pin 74HC4515 IC. Make sure all the pins pass
through the circuit board before e soldering.
Great job so far! Take a moment now to check your previous solder joints for
“opens” where the solder did not completely flow around the connection or
solder “bridges” between closely spaced pads or IC pins. It seems the best
time to identify these types of problems is now when you’re focused on this
section of the board, saving you time to try to rethink your steps later.
33. Install R39, 10K ohm (brown-black-orange).
34. Install R38, 33K ohm (orange-orange-orange).
35. Install R46, 470 ohm (yellow-violet-brown).
36. Install C51, .1uF disc (marked 104).
37. Install R47, 48, and 49, all 470 ohm (yellow-violet-brown).
38. Install disc capacitors C52, 53, and 54, all .1uF (marked 104).
That concludes most of the digital circuitry included in your kit, take a moment to recheck your work. We’ll get started now on the audio processing
section of the direction finder kit.
39. Locate the position of C9 in the upper left hand corner of the main
circuit board. Install C9, .01uF disc capacitor (marked .01 or 103 or
10nF).
40. Install R23, 220K ohm (red-red-yellow).
41. Identify D2, the 1N4148 small signal diode (marked with a polarity
band). Use care to orient the part as shown in the parts diagram, and install in the D2 position.
42. Install R25, 330 ohm (orange-orange-brown).
43. Install R24, 10K ohm (brown-black-orange).
44. Install speaker output jack J4 using the pin connector.
45. Identify and install Q2, the transistor marked 2N3904. The flat side
must be placed as shown on the PC board, facing R24. Mount it as close
to the board as possible without forcing it. Carefully solder all three
leads.
46. Identify and install C33, a 10 uF electrolytic capacitor. Remember
DDF1 • 20
Page 21

that electrolytics are polarized and must be mounted as shown in the
diagram.
47. Install U3, the 324 op amp. Be sure to point the dot, notch, or band
as shown in the parts diagram. Solder all 14 leads
48. Install R15, 220K ohm (red-red-yellow).
49. Install R17, 330 ohm (orange-orange-brown).
50. Moving to the right of J3, Install R43 and 45, both 33K ohm (orange-
orange-orange).
51. Install transistor Q1, a 2N3904 type (marked 3904). Be sure to orient
the flat side as shown in the parts diagram.
52. Identify and install small signal diode D1, 1N4148 (glass bead type
with polarity band). Mount as shown in the parts layout diagram.
53. Install R16, 10K ohm (brown-black-orange). There is another plated
through hole inside the silkscreen for R16 that is not the installation hole.
Be sure to install the resistor lead in the proper hole.
54. Install C20, .47 uF electrolytic capacitor (marked .47). The banded
(negative) side faces R8.
55. Install R8, 22K ohm (red-red-orange).
56. Install C4 and C5, both .01uF disc capacitors (marked .01 or 103).
57. Install R5, 33K ohm (orange-orange-orange).
58. Install R11, another 33K ohm (what were those colors)....(orange-
orange-orange).
58. Install R12, 56K ohm (green-blue-orange).
59. Install C7, .1uF disc (marked 104).
60. Install C6, .01 disc capacitor (marked .01 or 103 or 10nF).
61. Install R6, 33K ohm (orange-orange-orange).
62. Install R14, 3.3K ohm (orange-orange-red).
63. Install R13, 10K ohm (brown-black-orange).
DDF1 • 21
Page 22

64. Install a 324 Op amp in the U1 position, paying attention to the cor-
rect part placement. Solder all 14 pins.
65. Install R9 and R10, both 33K ohm (orange-orange-orange).
66. Install R1, 33K ohm (orange-orange-orange).
67. Install R4, 27K ohm (red-violet-orange).
68. Install C1, .01uF (marked .01 or 103 or 10nF) .
69. Install R2,R3, and R7, all 33K ohm (orange-orange-orange).
70. Install C2 and C3, both .01uF (marked .01 or 103 or 10nF).
Great going! You are really making progress now. Let’s finish up the components on the “component” side of the circuit board.
71. Install R21, 220K ohm (red-red-yellow).
72. Install R22, 10K ohm (brown-black-orange).
73. Install electrolytic capacitor C8 (1 uF). Be sure to orient the part cor-
rectly.
74. Install R18, 100K ohm (brown-black-yellow).
75. Install the last 324 Op amp in the U2 position. Be sure to orient the
part correctly before soldering.
76. Install D5, a 1N4148 diode. Again, observe the correct polarity for
this part.
77. Install R32, 22K ohm (red-red-orange).
78. Install R31 and R20, both 33K ohm (orange-orange-orange).
79. Install R33, 68K ohm (blue-gray-orange).
80. Install C18 and 19, both .01uF (marked .01 or 103 or 10nF).
81. Install R30, 33K ohm (orange-orange-orange).
82. Moving to the right, install R51, 47 ohm (yellow-violet-black).
83 for the final component on the main board component side, install
C38 (.01uF) (marked .01 or 103 or 10nF).
DDF1 • 22
Page 23
Whew! Well, that's about it for the main circuit board assembly. Take a few
minutes now to double check your work, especially the placement of the polarized and orientation specific components. The next time we re-visit this
board we’ll be ready to energize the circuit, so this is your last chance to “get
it right the first time” and avoid timely circuit troubleshooting. Remember that
time spent here can save a lot of time (and expense!) when the unit is initially
turned on.
In the final assembly steps for the DF main board, the components will be
mounted to the SOLDER SIDE of the circuit board (aren’t you glad you didn’t
jump ahead)! This will allow for correct orientation of the controls through the
case assembly. These controls and displays will be the ones you’ll be looking at for years to come, so take your time to ensure proper positioning of
each component.
84. Moving to the solder side of the circuit board, identify the locations
for S1 (power), S2 (scan stop), and S3 (phase invert). Carefully insert
the slide switches into position (one at a time is fine) in the S1, S2, and
S3 positions. Ensure that each switch is mounted flush to the circuit
board, and solder into place. The switches are DPDT type, so “up down” orientation is not critical. Check the placement of each switch by
“test fitting” the circuit board into the upper half of the case assembly and
observing the switch position. Take care not to “skew” the switch as it
may bind during normal operation.
85. Identify the 10K trimmer potentiometer (labeled 10K or 103 on the
side of the pot). Note that the silkscreen for this part (and R19 and 36) is
on the component side of the PC board. However, this part must be installed on the solder side of the board. Install this potentiometer from the
solder side of the circuit board in the R50 position. Check the parts
placement diagram for correct placement if you are unsure. Make sure
that this control is mounted flush to the circuit board and solder into
place. Remember that you should be looking at a reverse image of the
circuit board and that R50 is closest to the outside of the circuit board.
86. in the same manner, mount and install the two remaining potenti-
ometers (500K ohms labeled 500K or 505) into the R19 and R36 position.
87. Observe the miniature
LED’s provided with your kit.
Being diodes, these components are polarized and must
be oriented correctly. Examine
LED
(-)
Leave these leads
as long as possible
PC Board
one of the LED’s and notice
(+)
DDF1 • 23
Page 24

how one lead is longer than the other. The longer of the two leads is the
anode, or (+) connection. Most diodes also have a flat molded in the
component body. This corresponds to the cathode or (-) side of the part.
Note also that while both of the holes is rectangular, only one of the
holes has the corners “rounded off“. The longer (anode) lead belongs in
the “rounded off” hole, and the shorter (cathode) lead belongs in the rectangular (non-rounded) hole. Now for the fun part! When mounting the
direction heading LED’s we would like the height of the diodes from the
circuit board to be at just the correct height to protrude through the top
panel of the unit. The easiest way to accomplish this task is to slide the
LED’s into place making absolutely sure that the “flat” side of the diodes
are correctly oriented as seen on the silkscreen. D3, 4, 17, 18, 19, 20,
21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32 are RED LED’s , while D16
is the GREEN LED. Once the LED’s are loosely into place, temporarily
fit the circuit board into the case top, and when tipped over the LED’s
should fall into their respective holes.
88. With the 19 LED’s correctly oriented and set to the correct height,
solder into place.
The main board assembly is complete! You are that much closer to a functioning Doppler DF system. Take a break...you have accomplished the biggest “chunk” of the kit. When we start up again, we’ll be creating an antenna
switching system for the direction finder
ASSEMBLY INSTRUCTIONS FOR THE ANTENNA SYSTEM
Roll those sleeves back up; we’ll get to the antenna switcher and individual
antenna assemblies to complete the Doppler DF kit.
Have a look at the ANTINT-1 antenna interface board. This is where we will
accomplish the solid state switching between each antenna, Please note that
this circuit board will be operating at RF frequencies; proper assembly techniques (i.e. short component lead lengths, coaxial cable connections ) will be
critical on this board and the antenna assemblies. To minimize these impedance destroying lead lengths, we have opted for a “surface mount” procedure of the remaining components. Therefore instead of the typical “thru hole
assembly“ you have completed on the main board, the components on this
assembly will be soldered on the same side of the circuit board. It is necessary to preform the components and trim excess leads prior to the component being installed.
1. Form and install diodes D1,
2, 3, 4 into their respective positions on the circuit board.
Diode Mounting Diagram
Solder Connection
Circuit Trace
PC Board
DDF1 • 24
Page 25

Use the shortest lead length possible. Note that these components are
polarized. Install the banded end as shown in the parts diagram. Don’t
worry about too much heat from your soldering iron; you will not damage
the diodes.
2. In the same manner form and
install inductors L1, 2, 3, and 4
(brown-red-gold). Keep those
lead lengths as short as possi-
Coil Mounting Diagram
Solder Connection
Circuit Trace
PC Board
ble.
3. There are also eight .001uF
disc capacitors to be installed.
Again, see the diagram for proper
placement. Install C1-C8 to the
correct “tabs” on the circuit board.
Again, keep the lead lengths as
Capacitor Mounting Diagram
102
Solder Connection
Circuit Trace
PC Board
short as possible!
WHIP ANTENNA AND ANTENNA MOUNTING BOARD INSTRUCTIONS
You will need to mount two components as well as an antenna whip to each
ANTMTG board
1. Install the 1N4148 diode on the ANTMTG circuit board in the same
manner in which you installed them on the switcher, keeping those leads
as short as possible.
2. Install the 1.2 uH coil in the proper position.
3. Repeat the steps for the remaining three circuit board assemblies.
COAXIAL CABLE PREPARATION AND ASSEMBLY
We’re getting very close to the end now! It is time to install the coaxial
“jumpers” that connect the antenna switcher board to the individual antenna
assemblies. To begin our preparation, locate the length of mini coax included
with your kit.
1. Cut four 13 inch pieces
RG-174 Coax
Tinned Braid
Center Conductor
of cable to connect the
switcher to each antenna
assembly.
Center Insulation
DDF1 • 25
Page 26

2. “Prep” each of the coaxial cables as shown in the diagram. Be careful
not to use too much heat when “tinning” the braid of the coax as this
could damage the center insulating shield.
3. Using some of your longer scrap resistor leads bent into a “U” shape,
hold the coax into position and slide the “jumpers” through the provided
mounting holes. These “jumpers” can be soldered on the bottom side of
the board to hold the coax into position for final soldering.
4. Solder the coax center conductor to the circuit board, then apply a
small fillet of solder to the braid. DO NOT USE TOO MUCH HEAT
WHEN ATTACHING THE BRAID, as this can cause the center insulation
of the cable to melt.
FINAL ANTENNA AND SWITCHER ASSEMBLY
Locate the antennas and their hardware. Now we get to put together the antennas themselves. To create the necessary holes for both the mounting
screw as well as the cable inputs, take your soldering iron and melt a “half
moon” shape in the side of the lid to allow clearance of the coaxial cable.
1] Use the following picture as a guide to construct the antenna. Place the
screw up through the bottom of the antenna PC board, then screw the
nut down from the top to hold it in place. Slide one of the internal tooth
washers over the screw and place the whip antenna onto that, screwing
it down tightly. Once all of the hardware is securely attached, you may
install the adhesive backed magnet Material to your “home brew” antenna. The magnet will “hang over” the circuit board slightly but do not
trim off the excess. The magnets will stay in place more securely if you
leave the excess in place. Now we’re in business!
Antenna Assembly Diagram
#4-40 screw
Nut with washer on top
Plastic Cap
Peel and stick magnet
DDF1 • 26
Page 27

FINAL ASSEMBLY
Our last task is to mount the antenna switcher cable to the ANTINT circuit
board. Special care must be used to ensure that the antennas sequence in
the correct order for proper operation of the RDF unit. You can use any type
of 5 conductor wire; 4 pair telephone wire or computer LAN cable works well.
If you look closely at the male DB9 connector provided with your kit you will
see that each of the pins is numbered. Solder one end of each of your 5
wires to the pins numbered 1 through 5. It is then a simple matter to follow
the wire to its opposite end and solder them to the ANTINT PC board. Pin 1
is soldered to ANT1, pin 2 to ANT4, pin 3 to ANT3 and pin 4 to ANT2. The
last wire is ground and solders to the ground point on the PC board. Once
assembly and test have been completed on the antenna switcher circuit
board you may affix a “jar cap” over the assembly to weatherproof. You can
place your iron on the plastic cap to make clearance reliefs to allow for cable
routing. The cap can be permanently installed using a hot melt glue gun or
other sealer of your choice.
INITIAL TESTING
Basic Testing
It is wise to review your workmanship, looking for circuit shorts or opens prior
to applying power. Use an ohmmeter to measure the resistance between
power and ground; the value should be greater than 2k ohms. Apply 12
VDC to the RDF unit with the power supply current limited to 150mA to prevent damage in the event of a problem (normal current drain is 100mA). Verify the presence of the following supply voltages: = 5V on the output of VR1,
pin 16 of U8, pin 8 of U4, pin 8 of U6, pin 16 of U7, pin 24 of U11, pin 16 of
U5. Verify +2.5 V on pin 14 of U3, verify +12 V on pin 4 of U1 and U2. This
completes the basic testing of the Doppler RDF circuit. The following tests
are recommended to identify and troubleshoot problems, but don't worry if
you don't have all the necessary test
equipment. Satisfactory performance
can usually be achieved without performing these tests.
Functional testing
Before connecting the antenna switcher,
verify the operation of clock oscillator U4
by connecting an oscilloscope to pin 3.
The output should be a square wave with
an amplitude of 5 V and a period of 125
DDF1 • 27
Page 28

ms (8 kHz). Use a frequency counter to verify the clock frequency is 8 kHz
+/- 250 Hz if you desire. Getting the clock frequency to exactly 8 kHz is not
necessary for proper operation, however, the values of R27 and R28 can be
changed to adjust the clock frequency. Verify that closing switch S2 disables
the clock. Open S2 (scan stop) and verify the operation of BCD counter U7
by connecting the oscilloscope sequentially to pins 14,13,12, and 11. The
signal frequency on these outputs should be approximately 4, 2, 1 and 0.5
kHz, respectively. Verify the presence of a square wave signal on pins 2,4,6
and 8 of buffer U12.
Signal Level Indicators
The following test uses an audio signal generator to simulate the presence of
the Doppler tone. Disconnect the speaker from audio level control potentiometer R50 to prevent loading the signal generator. Connect an audio signal
generator to the receiver audio input terminal. Set the generator to apply a
500 Hz sine wave with amplitude 1V P-P. Rotate R50 until the audio overload LED D3 illuminates. Then, adjust R50 until low signal level LED D4
lights. Adjust R50 so that LEDs D3 and D4 are off, set calibrate control R36
to the center of its range and adjust damping control R19 for minimum damping (fully CCW).
DDF1 • 28
Page 29

Direction Indicator
Adjust the frequency of the audio generator very slowly around 500 Hz while
observing the LED display. You should see the direction indicating LEDs
around the green center LED illuminating. The LED illumination should rotate clockwise when the frequency of the generator is set slightly lower than
the antenna rotation frequency. (Only one LED will be on when the frequency of the generator equals the antenna rotation frequency.) The display
should rotate counterclockwise. The audio generator must be capable of
very fine frequency adjustment in order to observe the transition. All LED’s in
the display may appear to be on if the signal generator frequency is just
10Hz different from that of the antenna rotation frequency determined by U4.
It is interesting to observe the sharpness of the digital filter on pin 1 of U2 on
the oscilloscope as the display makes the transition from counterclockwise.
You can see the simulated Doppler tone of the generator come out of the
noise, peak and return into the noise as the transition takes place.
Calibration Control
Verify the function of the calibrate control by adjusting the audio generator
equal to the antenna rotation frequency. At this point, only a single LED will
illuminate. Rotate the calibrate control through out its range and observe the
direction indicating LED "move" around the display. The range of movement
should be more than 360 degrees. The direction indicating LED may move
slightly if the generator frequency drifts. It is very difficult to keep the generator frequency synchronized exactly, but that's not necessary in this test.
Disconnect the signal generator and reconnect the speaker to the receiver
audio input terminal.
Antenna Switcher
Verifying proper operation of the antenna switcher sequencing circuit requires only a DC voltmeter. Connect the antenna switcher to the Doppler
RDF unit and position the four mag-mount antennas on a table. Do not install any of the whip antennas for this test. It is essential that the antenna be
turned on in sequence to emulate an antenna spinning in a circular pattern
for the Doppler RDF unit to operate correctly. A single antenna turned on
out of sequence is enough to produce a bogus RDF reading. It does not
matter if the antenna spins clockwise or counterclockwise.
DDF1 • 29
Page 30

Scan/stop switch S2 stops the antenna from spinning. Close and open S2
until the voltage on terminal J2 pin 1 reads +5V. Pins 2, 3 and 4 should all
read 0V. Pin 1 is the antenna enable signal for antenna 1. Label the corresponding mag mount antenna on the table as antenna 1. Close and open S2
until the voltage on terminal J2 pin 2 reads +5V. Pins 1,3, and 4 should all
read 0V. Pin 2 is the antenna enable signal for antenna 4 and should be positioned to the right of antenna 1 as viewed from the center of the antennas
for a clockwise spin. Close and open S2 until the voltage on terminal J2 pin
3 reads +5V. Pins 1,2, and 4 should all read 0V. Pin 3 is the antenna enable
signal for antenna 3 and should be positioned to the right of antenna 2 as
viewed from the center of the antennas. Close and open S2 until the voltage
on terminal J2 pin 4 reads +5V. Pins 1, 2, and 3 should all read 0V. Pin 4 is
the antenna enable signal for antenna 2 and should be positioned to the right
of antenna 3 as viewed from the center of the antennas.
Testing the RF operation of the antenna is quite simple. Place all four mag
mount antennas around the center of the car roof, placing each antenna at
the corner of an 18.25 inch square pattern for operation on 146 MHz. Do not
install any of the whip antennas yet. Connect the RF output of the antenna
switcher to an FM receiver or transceiver tuned to a strong NOAA weather
broadcast signal. Caution: Make sure you disable transmit mode if you
are using a transceiver!
Apply power to the RDF unit and open S2 to stop the spinning process.
Take one whip antenna and touch it to the mounting screw on each of the
mag mount antennas. Only one antenna should provide a signal strength
reading similar to it being connected directly to the FM receiver. Remove the
whip from the selected antenna and touch it to each of the other three antennas. The NOAA signal should be weak or nonexistent. Close and open S2
until another antenna is selected and repeat the same test. Continue the
process until you have verified each antenna can be turned on while the
other three remain off.
Operation
Checking performance of the RDF unit is best done in a large, empty area
away from tall buildings: a parking lot will do. Use caution at all times during
open road operation of the RDF unit. Use a minimum of two people for all
testing and operation of the RDF unit: one to operate the vehicle and the
other to operate the RDF unit. The magnets securing your antennas to the
roof of the car were designed for use at reduced speeds. If you intend to use
the DDF1 at highway speeds, you may want to get some stronger magnets.
The powerful magnets contained in computer hard drives are excellent for
this application and can often be found at flea markets or surplus store for as
little as $1.00 or less. The typical magnet found in an audio speaker would
DDF1 • 30
Page 31

also work well. As a safety measure, secure each PopTop Mag-Mount with
20 pound fishing line when operating the vehicle at highway speeds.
Attach all four whip antennas to the mag-mount antenna bases placed about
the center of the car top. Connect the RF output of the antenna switcher to a
FM receiver transceiver tuned to a strong NOAA weather broadcast signal.
Caution: Again, make sure you disable transmit mode if you are using a
transceiver! It is best to use a smaller, handheld walkie talkie with your
DDF1. The unit connects easily to the antenna on your handheld and because they have less output power, there is less chance of doing damage by
accidentally transmitting into your DDF1.
Adjust the receiver's audio to a comfortable level in the external speaker.
Apply 12 V to the RDF unit and “spin” the antenna by closing switch S2. As
soon as S2 is closed, you should hear a 500 Hz tone imposed on the receiver audio. Rotate audio level adjust control R50 so that low signal level
LED D4 and audio overload LED D3 are extinguished. Never trust bearing
indications if D3 and/or D4 are illuminated. The direction indicating display
should be relatively constant with a single LED lit, or one or two adjacent
LEDs alternately illuminating. Adjust calibrate control R36 so that the direction indicating LED is consistent with the general direction of the NOAA
transmission with respect to your location and the position of the car. Have
the driver slowly circle while you observe the display. You should see the direction indicating LED move in the opposite direction as the car is turning in
a circle. The position changes relative to the changing direction of the car,
however, the direction indicated from the center of the circle the car is driving
should remain fixed. If the display turns in the same direction as the car, flip
phase invert switch S3 to the opposite position to correct the 180 degrees
phasing offset. This completes the rough calibration procedure.
Final Calibration
A more accurate calibration can be achieved while the car is in motion. Position a volunteer with an HT in a safe spot on the side of a long, straight and
vacant roadway about 1/4 to 1/2 mile away. Have them transmit on low
power (up to 5W) while traveling towards them. The RDF operator should
calibrate the RDF display to indicate 0 degrees as straight ahead. The display should change to 180 degrees indicating the signal is coming from directly behind the car as the vehicle passes the transmitter. The moving calibration producer functions to average out false reflected signals caused by
multipath propagation. You may notice that the Doppler tone changes as the
car moves about. The Doppler tone will sound like a pure, undistorted 500
Hz sine wave in the absence of reflected or multipath interference. Direction
indications are most reliable under these conditions. When reflected or multipath signals are present, the Doppler tone will sound raspy and distorted.
DDF1 • 31
Page 32

Those signal components may arrive from different directions causing false
bearing indications. The LED display tends to jump around randomly under
these conditions. Avoid taking bearing information when the Doppler tone
sounds raspy. You can minimize display jitter by slowing the response time
of the digital filter. This is accomplished by increasing damping control R19.
With a little time, you can master the art of Doppler RDFing.
The wide bandwidth antenna switcher can be used for DFing on other bands,
provided the proper antenna whip lengths and antenna spacing are used.
Arrange the antennas in a square pattern. Typical antenna spacing for common frequencies is shown in the table below. Whip lengths are measured
from the top surface of the mag-mount PC board base to the tip of the antennas.
You can determine
Frequency Antenna length in
inches
146 MHz 18
223 MHz 13 1/2
446 MHz 7 7/8
the cor- rect antenna length for other frequencies by interpolation of values from the table
above. The Doppler DF’er will work on virtually any VHF/UHF frequency!
FINAL CASE UP
When all your tests are complete, you will want to case up your main PC
board. First, attach the overlay to the plastic case front. The best (only) way
to do this is to spray the surface with a light coating of window cleaner. Next,
peel the backing from the overlay and position it so that all the holes line up.
At that point, smooth down the overlay with your fingers and leave the case
top with the overlay properly positioned until the window cleaner evaporates.
If you try to place the sticker on a dry surface and do not place it correctly the
first time, you will be unable to remove the overlay without ruining it. Once
the overlay is dry, you can attach the board to the case using the screws provided. While you’re waiting you can attach the speaker to the case bottom
using the screws included in your kit. The speaker fits over the holes drilled
into the plastic case bottom. Insert the two screws into the holes in the case
bottom and then place the speaker mounting holes through the screws. A nut
on each screw will hold the speaker tight to the case bottom. Plug the
DDF1 • 32
Page 33

speaker into the 2 pin header and align the case top and bottom. Put a few
more screws in place and you’re ready to roll.
TROUBLESHOOTING INSTRUCTIONS
While we had hoped that it wouldn’t come to this, if you are having trouble
with your direction finder, here are a few suggestions.
Use a methodical, logical troubleshooting technique. Most problems can be
solved using common sense. A volt-ohm meter and a clear head are usually
all that are needed to correct any problem. Most problems are due to misplaced parts and/or bad solder connections. Working backwards through the
assembly steps will often lead you to the problem.
Please understand that it is nearly impossible to “troubleshoot” by phone,
any specific questions should be documented and sent to us by mail.
CONCLUSION
We sincerely hope that you enjoy the use of this Ramsey product. As always, we have tried to compose our manual in the easiest, most “user
friendly” format that is possible. As our customers, we value your opinions,
comments, and additions that you would like to see in future publications.
Please submit comments or ideas to:
Ramsey Electronics Inc.
Attn. Hobby Kit Department
793 Canning Parkway
Victor, NY 14564
And once again, thanks from the folks at Ramsey!
DDF1 • 33
Page 34

DDF-1 ANTENNA SCHEMATIC DIAGRAM
DDF1 • 34
Page 35

The Ramsey Kit Warranty
Please read carefully BEFORE calling or writing in about your kit. Most
problems can be solved without contacting the factory.
Notice that this is not a "fine print" warranty. We want you to understand your rights and ours too! All
Ramsey kits will work if assembled properly. The very fact that your kit includes this new manual is
your assurance that a team of knowledgeable people have field-tested several "copies" of this kit
straight from the Ramsey Inventory. If you need help, please read through your manual carefully, all
information required to properly build and test your kit is contained within the pages!
1. DEFECTIVE PARTS: It's always easy to blame a part for a problem in your kit, Before you conclude
that a part may be bad, thoroughly check your work. Today's semiconductors and passive components
have reached incredibly high reliability levels, and its sad to say that our human construction skills
have not! But on rare occasion a sour component can slip through. All our kit parts carry the Ramsey
Electronics Warranty that they are free from defects for a full ninety (90) days from the date of
purchase. Defective parts will be replaced promptly at our expense. If you suspect any part to be
defective, please mail it to our factory for testing and replacement. Please send only the defective
parts), not the entire kit. The parts) MUST be returned to us in suitable condition for testing. Please be
aware that testing can usually determine if the part was truly defective or damaged by assembly or
usage. Don't be afraid of telling us that you 'blew-it', we're all human and in most cases, replacement
parts are very reasonably priced.
2. MISSING PARTS: Before assuming a part value is incorrect, check the parts listing carefully to see
if it is a critical value such as a specific coil or IC, or whether a RANGE of values is suitable (such as
"100 to 500 uF"). Often times, common sense will solve a mysterious missing part problem. If you're
missing five 10K ohm resistors and received five extra 1K resistors, you can pretty much be assured
that the '1K ohm' resistors are actually the 'missing' 10 K parts ("Hum-m-m, I guess the 'red' band
really does look orange!") Ramsey Electronics project kits are packed with pride in the USA. If you
believe we packed an incorrect part or omitted a part clearly indicated in your assembly manual as
supplied with the basic kit by Ramsey, please write or call us with information on the part you need
and proof of kit purchase.
3. FACTORY REPAIR OF ASSEMBLED KITS:
To qualify for Ramsey Electronics factory repair, kits MUST:
1. NOT be assembled with acid core solder or flux.
2. NOT be modified in any manner.
3. BE returned in fully-assembled form, not partially assembled.
4. BE accompanied by the proper repair fee. No repair will be undertaken until we have received the
MINIMUM repair fee (1/2 hour labor) of $25.00, or authorization to charge it to your credit card
account.
5. INCLUDE a description of the problem and legible return address. DO NOT send a separate letter;
include all correspondence with the unit. Please do not include your own hardware such as nonRamsey cabinets, knobs, cables, external battery packs and the like. Ramsey Electronics, Inc.,
reserves the right to refuse repair on ANY item in which we find excessive problems or damage due
to construction methods. To assist customers in such situations, Ramsey Electronics, Inc., reserves
the right to solve their needs on a case-by-case basis.
The repair is $50.00 per hour, regardless of the cost of the kit. Please understand that our technicians
are not volunteers and that set-up, testing, diagnosis, repair and repacking and paperwork can take
nearly an hour of paid employee time on even a simple kit. Of course, if we find that a part was
defective in manufacture, there will be no charge to repair your kit (But please realize that our
technicians know the difference between a defective part and parts burned out or damaged through
improper use or assembly).
4. REFUNDS: You are given ten (10) days to examine our products. If you are not satisfied, you may
return your unassembled kit with all the parts and instructions and proof of purchase to the factory for
a full refund. The return package should be packed securely. Insurance is recommended. Please do
not cause needless delays, read all information carefully.
DDF1 • 35
Page 36

Doppler Radio Direction Finder
Quick Reference Page Guide
Introduction to the DDF1 ................ 4
DDF1 Circuit Description ............... 4
Parts List .......................................11
DDF1 Assembly Steps ..................14
Component Layout .......................17
Schematic Diagram ......................18
Initial Testing .................................22
Ramsey Warranty .........................23
REQUIRED TOOLS
• Soldering Iron (WLC100)
• Thin Rosin Core Solder (RTS12)
• Needle Nose Pliers (MPP4 or RTS05)
• Small Diagonal Cutters (RTS04)
ADDITIONAL SUGGESTED ITEMS
• Helping Hands Holder for PC Board/Parts (HH3)
• Technician’s Tool Kit (TK405)
• Desoldering Braid (RTS08)
Price: $5.00
Ramsey Publication No. MDDF1
Instruction manual for:
RAMSEY MODEL NO. DDF1
DOPPLER RADIO DIRECTION FINDER
RAMSEY ELECTRONICS, INC.
590 Fishers Station Drive
Victor, New York 14564
Phone (585) 924-4560
Fax (585) 924-4555
www.ramseykits.com
DDF1 • 36
 Loading...
Loading...