


ACCESSORIES MANUAL
www.power-electronics.com
SD300
ETHERNET MODULE


A C C E S O R I E S
Ethernet Module
Accessories Manual
Edition: August 2017
SD30MA01AI

SD300 - ETHERNET MODULE
POWER ELECTRONICS
2

POWER ELECTRONICS
SD300 - ETHERNET MODULE
3
ABOUT
PURPOSE
This manual contains important instructions for the installation and
maintenance of the optional Ethernet communication module for Power
Electronics SD300 variable speed drives.
AUDIENCE
This manual is intended for qualified customers who will install, operate and
maintain Power Electronics SD300 variable speed drives.
Only trained electricians approved by the installation company may install
and commission the drives. The instructions assume that the installer is
familiar with electrical installation rules and regulations.
REFERENCE MANUALS
The following reference guide is available for the SD300 variable speed
drives:
• Getting Started Manual
POWER ELECTRONICS CONTACT INFORMATION
Power Electronics, S.A.
C/ Leonardo da Vinci, 24 – 26
46980 – PATERNA
SPAIN
Tel. 902 40 20 70 (Spain) • Tel. (+34) 96 136 65 57 • Fax (+34) 96 131 82 01
Email: sales@power-electronics.com
Website: www.power-electronics.com

SD300 - ETHERNET MODULE
POWER ELECTRONICS
4
Revisions
The equipment and technical documentation are periodically updated. Power
Electronics reserves the right to modify all or part of the contents of this manual without
previous notice. To consult the most updated information of this product, you may
access through our website www.power-electronics.es, where the latest version of this
manual can be downloaded.
Date Revision Description
29 / 08 / 2017 A First edition.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
TABLE OF CONTENTS
5
TABLE OF CONTENTS
1. INTRODUCTION ......................................................... 14
What is Ethernet? ......................................................... 14
Components ................................................................. 14
2. ETHERNET COMMUNICATION MODULE
FEATURES ....................................................................... 15
Common Features ........................................................ 15
Layout of the module .................................................... 16
3. INSTALLATION AND CONNECTION ......................... 17
Installation .................................................................... 17
Terminal Block of Ethernet Communication……………….
Specification ................................................................. 22
Network cable specification ..................................... 23
Protocol Selection .................................................... 24
LEDs description ...................................................... 25
4. MODBUS TCP ............................................................. 28
Modbus TCP frame structure ........................................ 28
Function Codes............................................................. 29
Exception Frame........................................................... 29
5. ETHERNET IP ............................................................. 31
Basic Protocol Configuration ........................................ 31
Implicit Messaging ........................................................ 32
Supported range ...................................................... 33
Input instance........................................................... 34
Output instance ........................................................ 37
Explicit Messaging ........................................................ 40
Identity object (Class 0x01, Instance 1) ................... 40

SD300 - ETHERNET MODULE
POWER ELECTRONICS
6
TABLE OF CONTENTS
Motor data object (Class 0x28, Instance 1) .............. 42
Control supervisor object (Class 0x29, Instance 1) .. 43
AC Drive Object (Class 0x2A; Instance 1) ............... 46
Class 0x64 (Drive Object) – Manufacture Profile ..... 48
6. PARAMETERS CONFIGURATION............................. 49
7. LOST COMMAND ....................................................... 56
Drive Keypad Parameters ............................................. 56
Modbus/TCP Lost Command Status ........................ 57
Ethernet/IP Lost Command Status ........................... 57
8. CONFIGURATION REGISTER ................................... 58

POWER ELECTRONICS
SD300 - ETHERNET MODULE
SAFETY SYMBOLS
7
SAFETY SYMBOLS
Always follow safety instructions to prevent accidents and potential hazards
from occurring.
In this manual, safety messages are classified as follows:
The following CAUTION symbols can be used in this manual and they
symbolize:
WARNING
Identifies potentially hazardous situations where
dangerous voltage may be present, which if not avoided,
could result in minor personal injury, serious injury or
death.
Be extremely careful and follow the instructions to avoid
the risk of electrical shocks.
CAUTION
Identifies potentially hazardous situations, which if not
avoided, could result in product damage, or minor or
moderate personal injury.
Read the message and follow the instructions carefully.
NOTICE
Identifies important measures to take in order to prevent
damage equipment and warranty lost, as well as
encouraging good use and environmental practices
Hot surface. Be careful and follow the instructions to
avoid burns and personal injuries.
Risk of fire. Be careful and follow the instructions to
prevent causing an unintentional fire.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
8
SAFETY INSTRUCTIONS
SAFETY INSTRUCTIONS
IMPORTANT!
Read carefully this manual to maximize the performance of the product and
to ensure its safe use.
In order to appropriately use the drive, please, follow all instructions
described in the installation manual which refer to transportation, installation,
electrical connection and commissioning of the equipment.
Power Electronics accepts no responsibility or liability for partial or total
damages resulting from incorrect use of equipment.
Please, pay careful attention to the following recommendations:
WARNING
Be cautious when handling the CMOS components of the
communication module.
Static may lead to product malfunctioning.
Turn the drive power off before changing the communication cable.
Otherwise, you may damage the module or a communication error may
occur.
Make sure to insert precisely the communication module connector to
the drive.
Otherwise, you may damage the module or a communication error may occur.
Check the parameter unit before setting up the parameters.
Otherwise, a communication error may occur.
Do not remove the cover while power supply is connected or the drive
is operating.
Otherwise, you may get an electric shock.
Do not run the drive with the front cover removed.
Otherwise, you may get an electric shock.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
SAFETY INSTRUCTIONS
9
The drive does not remove the voltage from the input terminals. Before
working on the drive, isolate the whole drive from the supply.
If you do not remove the power supply, you may get an electric shock.
Do not remove the cover except for periodic inspections or wiring, even
if the input power is not applied.
Otherwise, you get an electric shock.
Operate the drive with dry hands.
Otherwise, you may get an electric shock.
Do not use cables with damaged insulation.
Otherwise, you may get an electric shock.
Do not subject the cables to abrasions, excessive stress, heavy loads or
pinching.
Otherwise, you may get an electric shock.
CAUTION
Install the drive on a non-flammable surface. Do not place
flammable material nearby. Otherwise, a fire could occur.
Disconnect the input power if the drive is damaged.
Otherwise, it could result in a secondary accident or fire.
Do not allow lint, paper, wood chips, dust, metallic chips or other
foreign matter into the drive. Otherwise, a fire or accident could
occur.
The inverter becomes hot during operation. Wait until it cools
down before performing any actions.
Touching hot parts may result in skin burns.
Do not apply power to a damaged drive or to a drive with parts
missing, even if the installation is complete.
Otherwise, you may get an electric shock.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
10
SAFETY INSTRUCTIONS
NOTICE
RECEPTION
• The SD300 are carefully tested and perfectly packed before delivering.
• In the event of transport damage, please ensure to notify the transport agency
and POWER ELECTRONICS: 902 40 20 70 (International +34 96 136 65 57),
or your nearest agent, within 24hrs from receiving the goods.
UNPACKING
• Make sure model and serial number of the variable speed drive are the same
on the box, delivery note and unit.
• Each variable speed drive is delivered with Hardware and Software technical
manuals.
RECYCLING
Equipment packaging must be recycled. Separate all different materials (plastic,
paper, cardboard, wood…) and place them in the corresponding containers. Ensure
waste collection is properly managed with a Non-Hazardous Waste Agent.
To guarantee health and natural environmental sources protection, the
European Union has adopted the WEEE directive concerning
discarded electric and electronic equipment (SEEA).
Waste of electrical and electronic equipment (WEEE) must be
collected selectively for proper environmental management
Our products contain electronic cards, capacitors and other electronic
devices that should be separated when they are no longer functional.
These WEEEs should be managed accordingly with a Hazardous
Waste Agent.
Power Electronics promotes good environmental practices and
recommends that all its products sold outside of the European Union,
once they reach the end of their life, are separated and the WEEE
managed according to the particular country applicable legislation
(especially: electronic cards, capacitors and other electronic devices)
If you have any questions about the electric and electronic equipment
waste, please contact Power Electronics.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
SAFETY INSTRUCTIONS
11
CYBER SECURITY DISCLAIMER
This product is designed to be connected to and to communicate information and
data via a network interface. The customer is the sole responsible for providing
and continuously ensuring a secure connection between the product and
customer network or any other network (as the case may be). Customer shall
establish and maintain any appropriate measures (such as but not limited to the
installation of firewalls, application of authentication measures, encryption of
data, installation of antivirus programs, etc) to protect the product, the network,
its system and the interface against any kind of security breaches, unauthorized
access, interference, intrusion, leakage and/or theft of data or information.
Power Electronics and its affiliates are not liable for damages and/or losses
related to such security breaches, any unauthorized access, interference,
intrusion, leakage and/or theft of data or information.
ELECTROMAGNETIC COMPATIBILITY (EMC)
• The drive is intended to be used in industrial environments (Second
Environment). It achieves compliance with C3 category defined in IEC/EN
61800-3 standard when the installation recommendation within this manual
are followed.
• Select communication and control system according to the drive EMC
environment. Otherwise, systems could suffer from interferences due to a low
EMS level.
SAFETY
Before operating the drive, read this manual thoroughly to gain an understanding
of the unit. If any doubt exists, please contact POWER ELECTRONICS, (902 40
20 70 / +34 96 136 65 57) or your nearest agent.
• Wear safety glasses when operating the drive with power applied or for
when the front cover is removed.
• Handle and transport the drive following the recommendations within this
manual.
• Install the drive according to the instructions within this manual and local
regulations.
• Do not place heavy objects on the drive.
• Ensure that the drive is mounted vertically and keeping the minimum
clearance distances.
• Do not drop the drive or subject it to impact.
• The SD300 drives contain static sensitive printed circuits boards. Use
static safety procedures when handling these boards.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
12
SAFETY INSTRUCTIONS
Avoid installing the drive under conditions that differ from those described in the
Environmental Ratings section.
CONNECTION PRECAUTIONS
• To ensure a correct operation of the drive, it is recommended to use a
SCREENED CABLE for the control wiring.
• The motor cable should comply with the requirements within this manual. Due
to increased leakage capacitance between conductors, the external ground
fault protection threshold value should be adjusted ad hoc.
• Do not disconnect motor cables if the input power supply remains connected.
• The internal circuits of the SD300 Series will be damaged if the incoming
power is connected and applied to the output terminals (U, V, W).
• Do not use power factor correction capacitor banks, surge suppressors, or
RFI filters on the output side of the drive. Doing so may damage these
components.
• Before wiring the terminals, make sure that the inverter keypad display is
turned off and the front cover is off as well. The inverter may hold a high
voltage electric charge long after the power supply has been turned off.
EARTH CONNECTION
• Ground the drive and adjoining cabinets to ensure a safe operation and to
reduce electromagnetic emission.
• Connect the input PE terminal only to the dedicated PE terminal of the drive.
Do not use the case, nor chassis screws for grounding.
• Ground the drive chassis through the labelled terminals. Use appropriate
conductors to comply with local regulations. The ground conductor should be
connected first and removed last.
• Motor ground cable must be connected to the PE output terminal of the drive
and not to the installation’s ground. We recommend that the section of the
ground conductor (PE) is equal or greater than the active conductor (U, V, W).
TRIAL RUN
• Verify all parameters before operating the drive. Alteration of parameters may
be required depending on application and load.
• Always apply voltage and current signals to each terminal that are within the
levels indicated in this manual. Otherwise, damage to the drive may occur.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
SAFETY INSTRUCTIONS
13
CAPACITORS DEPLETION
If the drive has not been operated for a long time, capacitors lose their charging
characteristics and are depleted. To prevent depletion, once a year run the device
under no-load conditions during 30-60 minutes. For further information, contact
Power Electronics.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
14
INTRODUCTION
1. INTRODUCTION
What is Ethernet?
Ethernet communication module board connects the SD300 drives to the
Ethernet network. It supports two kinds of protocols, Modbus/TCP and
Ethernet/IP.
The drive can be controlled and monitored by PLC sequence program or
any Master Module. Since Ethernet and IPv4, which are the core of the
Internet, have been supported, wherever the Internet can be deployed,
controlling and monitoring are possible. But, the factory Ethernet network
must be connected to the Internet through a gateway.
Installation time can be reduced and maintenance becomes easier, since
only simple wiring is needed.
Components
The Ethernet module kit contains the following parts:
• 1 Ethernet Communication Module board
• 1 Ethernet module manual
• 1 Brass bar (M3xL23)
• 1 Brass bar (M3xL17.3)
• 2 Fixing screws (M3xL8)
1

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET COMMUNICATION MODULE FEATURES
15
2. ETHERNET COMMUNICATION
MODULE FEATURES
Common Features
Transmission Speed
10Mbps, 100Mbps
Transmission Method
Baseband
Max. Extensible Distance between Nodes
100m (Node-Hub)
Max. Node Number
Hub connection
Auto-Negotiation
Supported
Max. Frame Size
1,500 bytes
Communication Zone Access Method
CSMA/CD
Frame Error Checking Method
CRC32
Recommended TCP Socket
2 sockets
2

SD300 - ETHERNET MODULE
POWER ELECTRONICS
16
ETHERNET COMMUNICATION MODULE FEATURES
Layout of the module

POWER ELECTRONICS
SD300 - ETHERNET MODULE
INSTALLATION AND CONNECTION
17
3. INSTALLATION AND
CONNECTION
WARNING
Turn the power supply off before connecting a communication network.
If the Ethernet communication module is removed or installed, the power
supply should be switched off.
Otherwise, the SD300 drive may get damaged and warranty will be voided.
Take off Ethernet communication module from the product after the power
supply is totally discharged.
Installation
To install the Ethernet communication module, please follow these steps:
Unfasten the front cover fixing bolt to remove the front cover and
remove the I/O cover.
3

SD300 - ETHERNET MODULE
POWER ELECTRONICS
18
INSTALLATION AND CONNECTION
Remove the keypad
Unfasten the screw from I/O the board and fasten the prepared brass
bars.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
INSTALLATION AND CONNECTION
19
Mount Ethernet communication module and fasten the two brass bar
screws (one was removed in step 4; the second is included in the kit).

SD300 - ETHERNET MODULE
POWER ELECTRONICS
20
INSTALLATION AND CONNECTION
Install the keypad and the communication module cover.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
INSTALLATION AND CONNECTION
21
Install the front cover again.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
22
INSTALLATION AND CONNECTION
Terminal Block of Ethernet Communication Specification
Pin No.
Signal
Description
Cable color
1
TX+
Transmitting data Plus
White / Yellow
2
TX-
Transmitting data Minus
Yellow
3
RX+
Receiving data Plus
White / Green
4
None
Not used
Blue
5
None
Not used
White / Blue
6
RX-
Receiving data Minus
Green
7
None
Not used
White / Brown
8
None
Not used
Brown
Notes:
• Make sure that cables connected to Pin 1 and 2 are twisted
together.
• Make sure that cables connected to Pin 3 and 6 are twisted
together.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
INSTALLATION AND CONNECTION
23
Network cable specification
Category 5 is used. Transmission speed of category 5 is 100MHz and
available up to 100Mbps.
Classification
Detail
Used
UTP (U.UTP)
Unshielded twisted
pair cable
Maximum 200MHz,
Voice + Information (Data) + Low video
signal
FTP (S.UTP)
Foil screened
twisted pair cable
Maximum 100MHz Electromagnetic
interruption (EMI) or electric stability
considered,
Voice + Information (Data) +
Low Video signal
STP (S.STP)
Shielded twisted
pair cable
Maximum 500MHz,
Voice + Information(Data) + Video signal,
Replacement for 750 coaxial cable

SD300 - ETHERNET MODULE
POWER ELECTRONICS
24
INSTALLATION AND CONNECTION
Protocol Selection
The Ethernet communication module supports two communication
protocols: Modbus TCP and Ethernet IP.
Use switch number 1 (located next to the Ethernet cable connector) at
the bottom of the module to select the protocol. Switch number 2, 3 and
4 are not available.
Switch state
Protocol
OFF (Switch at the upper position)
Modbus TCP
ON (Switch at the lower position)
Ethernet IP
The protocol cannot be changed while the module is operating, even if
the switch selection is changed. Protocol is determined by the state of
the switch when the option module is turned on or when the drive is
initialized by setting parameter [CM.94 Comm Update] to YES.
POWER ELECTRONICS
SD300 - ETHERNET MODULE
INSTALLATION AND CONNECTION
25
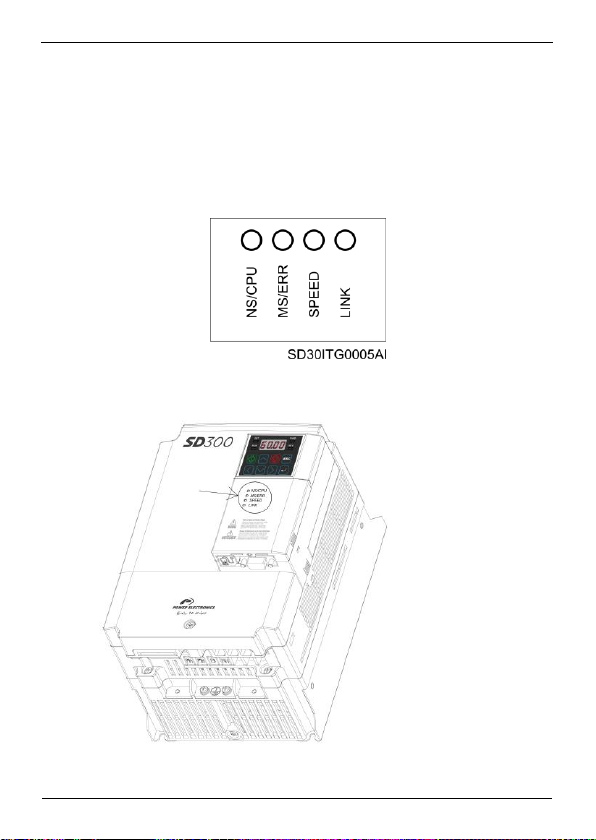
LEDs description
The Ethernet module has four LEDs that show its status at all times. The
behaviour of the first two, from left to right, depends on the active
communication protocol (Modbus TCP or Ethernet IP), while the other
two (SPEED and LINK) have the same behaviour for both protocols.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
26
INSTALLATION AND CONNECTION
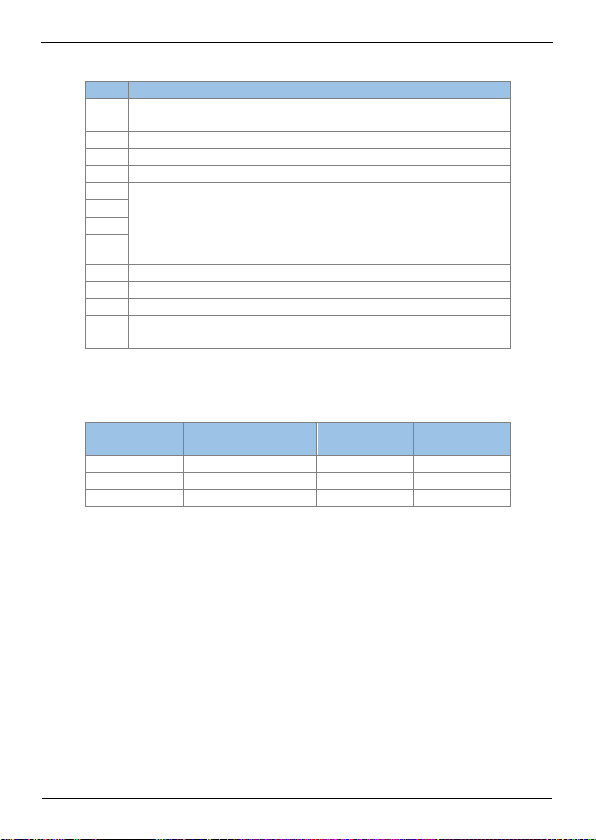
The status of Ethernet Line LED (Ethernet/IP and Modbus/TCP are the
same)
LED
COLOR
STATUS
FUNCTION
SPEED
Green
ON
Communication speed is 100Mbps.
OFF
Communication speed is 10Mbps.
LINK
Green
ON
Ready to communicate.
OFF
There is a problem with the communication cable. Check if
wiring is correct.
The status of Modbus/TCP LED & Troubleshooting
LED
COLOR
STATUS
FUNCTION AND TROUBLESHOOTING
CPU
Green
FLASH
The CPU of Modbus/TCP is operating normally when the
power is well supplied to the communication module.
OFF
Failure in power supply to the communication module.
Reinstall the module.
ERROR
Red
OFF
The communication module is working normally, without
errors.
ON
IP adress is set to 0.0.0.0 or 255.255.255.255 (these values
should not be used).
CPU and
Flash
- Interrupted communication. Turn off the power and then
reinstall the module.
- Data from the drive is not updated to the Ethernet
module. Execute communications update command or
regenerate the power again.
Flashing
slower
than
CPU
IP address conflict. Ensure that the IP address is correct and
not repeated in another device from the network.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
INSTALLATION AND CONNECTION
27
The status of Ethernet/IP LED & Troubleshooting
LED
COLOR
STATUS
DESCRIPTION
NS
Green
ON
The status is I/O communicating when Class 1 connection is
well connected.
OFF
Client and TCP are not connected.
FLASH
UCMM communication is available once client and TCP are
connected.
Red
ON
IP address conflict. Ensure that the IP address is correct and
not repeated in another device from the network.
OFF
No problems with the Ethernet module.
FLASH
Connection abnormally interrupted. Check if the network
cable and connection state are correct.
MS
Green
ON
The communication module is working normally.
OFF
There is a problem with the communication module.
Red
ON
IP adress is set to 0.0.0.0 or 255.255.255.255 (these values
should not be used).
OFF
The communication module is working normally.
FLASH
- Interrupted communication. Turn off the power and
reinstall the module.
- Data from the drive is not updated to the Ethernet
module. Excute a communications update command or
regenerate the power again.
Notes:
• When the module is initialized by the selection of Ethernet/IP,
LEDs turn on and off following the sequence:
MS (green) → NS (red) → MS (red) → NS (green) → NS (red) → NS
(off) → MS (green).
• When IP address is crashed, please reset IP and execute Comm.
Update (CM.94=1).
• Do not use Comm Update (CM.94=1) when the drive is running
or in cyclic communication.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
28
MODBUS TCP
4. MODBUS TCP
Modbus TCP frame structure
Modbus TCP frame can be divided in two parts: header + PDU.
Modbus Application Protocol (MBAP)
Header: 7 bytes
Protocol Data unit
(PDU): 5 bytes ~
Generally, Ethernet uses Ethernet II Frame.
The header is composed by 7 bytes:
• Transaction Identifier: 2 bytes. It is increased by 1 each time
as a unique transmitting number when data frame is sent
from Client to Server.
• Protocol Identifier: 2 bytes. It is fixed to 0.
• Length: 2 bytes. Data frame length (length from MBAP
header to the Unit Identifier).
• Unit Identifier: 1 byte. When using Modbus/TCP and
Modbus/RTU external gateway, slave number should be
written. When using Ethernet module with Modbus/TCP, the
slave number is fixed as 0xFF.
The Protocol Data Unit is composed of a Function Code and data.
Function codes are explained in the following subsections.
4

POWER ELECTRONICS
SD300 - ETHERNET MODULE
MODBUS TCP
29
Function Codes
From all of the functions that exist in Modbus protocol, these are the ones
used by the Ethernet optional module:
Function
Description
3
Registers Reading
4
Read Input Register
6
Write Single Register
16
Registers Writing
The implementation of this function code in the drive allows reading up to
120 registers into a Parameter Group in a frame. If you want to access to
a consecutive memory registers, but belonging to different groups, you
should access in so many frames as groups are involved.
Please, refer to the Getting Started manual of your SD300 for further
information on Modbus functions and examples.
Exception Frame
If there is any error while the Client sends data to the Server, an exception
frame will be sent to the Client.
The structure of this frame is:
Error code: 1 byte
Exception code: 1 byte
The error code is 0x80 + Code of the function required by the client.
The exception code, on the other hand, may be one of the following:

SD300 - ETHERNET MODULE
POWER ELECTRONICS
30
MODBUS TCP
Type
Code
Description
Illegal Function
0x01
The required function is not supported.
Illegal Data Address
0x02
Unused address is required or to be modified.
Illegal Data Value
0x03
The modified data exceeds the permitted
range when it needs to modify the data.
Slave Device Failure
0x04
There is an error in the server (drive
communication failure, Initialization failure…)
Slave Device Busy
0x06
The server can’t respond due to another
process (such as drive parameter initialization
or module initialization setting)
Write Permition Error
0x20
The value cannot be modified because the
parameter is prohibited to modify.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
31
5. ETHERNET IP
Basic Protocol Configuration
The Ethernet/IP is a protocol implemented with the CIP (Common
Industrial Protocol), defined by the ODVA, by using TCP and UDP.
• Originator: Device requesting connection, called Client. The
device represents a PLC or a scanner.
• Target: Device that responds to the connection, called
Server. The device represents a SD300 drive.
5

SD300 - ETHERNET MODULE
POWER ELECTRONICS
32
ETHERNET IP
Ethernet/IP Layers
[1]
Implicit Messaging
An Implicit Message is also called an I/O Message, which are the data
communicated between the Client (Originator) and the Server (Target) at
present period by the Input Instance and Output Instance. The connection
is in Class 1.
[1] Source: https://www.odva.org

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
33
Supported range
• Transport Type
o Originator->Target: Point to Point
o Target->Originator: Multicast
• Transport Trigger: Cyclic
• Configuration Connection: 1
• Connection Tag: Not supported
• Priority
o Originator->Target: Scheduled
o Target->Originator: Scheduled
o Configuration Data: Not supported

SD300 - ETHERNET MODULE
POWER ELECTRONICS
34
ETHERNET IP
Input instance
Drive status data periodically sent from the drive to a PLC or Client
device.
Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
70
0
Running
1 (Fwd)
Faulted
1 2
Speed Actual (Low Byte) - RPM unit (note 1)
3
Speed Actual (High Byte) - RPM unit
71
0
At
Referen
ce
Ref
From
Net
Ctrl
From
Net
Ready
Running
2 (Rev)
Running
1 (Fwd)
Warning
Faulted
1
Drive State
2
Speed Actual (Low Byte) - RPM unit
3
Speed Actual (High Byte) - RPM unit
110
0
Running
1 (Fwd)
Faulted
1 2
Speed Actual (Low Byte) - Hz unit (note 1)
3
Speed Actual (High Byte) - Hz unit
111
0
At
Referen
ce
Ref
From
Net
Ctrl
From
Net
Ready
Running
2 (Rev)
Running
1 (Fwd)
Warning
Faulted
1
Drive State
2
Speed Actual (Low Byte) - Hz unit
3
Speed Actual (High Byte) - Hz unit
141
0
Status Parameter - 1 data (Low Byte)
1
Status Parameter - 1 data (Hi Byte)
142
0
Status Parameter - 1 data (Low Byte)
1
Status Parameter - 1 data (Hi Byte)
2
Status Parameter - 2 data (Low Byte)
3
Status Parameter - 2 data (Hi Byte)
143
0
Status Parameter - 1 data (Low Byte)
1
Status Parameter - 1 data (Hi Byte)
2
Status Parameter - 2 data (Low Byte)
3
Status Parameter - 2 data (Hi Byte)
4
Status Parameter - 3 data (Low Byte)
5
Status Parameter - 3 data (Hi Byte)
144 0 Status Parameter - 1 data (Low Byte)

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
35
Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
1
Status Parameter - 1 data (Hi Byte)
2
Status Parameter - 2 data (Low Byte)
3
Status Parameter - 2 data (Hi Byte)
4
Status Parameter - 3 data (Low Byte)
5
Status Parameter - 3 data (Hi Byte)
6
Status Parameter - 4 data (Low Byte)
7
Status Parameter - 4 data (Hi Byte)
145
0
Status Parameter - 1 data (Low Byte)
1
Status Parameter - 1 data (Hi Byte)
2
Status Parameter - 2 data (Low Byte)
3
Status Parameter - 2 data (Hi Byte)
4
Status Parameter - 3 data (Low Byte)
5
Status Parameter - 3 data (Hi Byte)
6
Status Parameter - 4 data (Low Byte)
7
Status Parameter - 4 data (Hi Byte)
8
Status Parameter - 5 data (Low Byte)
9
Status Parameter - 5 data (Hi Byte)
146
0
Status Parameter - 1 data (Low Byte)
1
Status Parameter - 1 data (Hi Byte)
2
Status Parameter - 2 data (Low Byte)
3
Status Parameter - 2 data (Hi Byte)
4
Status Parameter - 3 data (Low Byte)
5
Status Parameter - 3 data (Hi Byte)
6
Status Parameter - 4 data (Low Byte)
7
Status Parameter - 4 data (Hi Byte)
8
Status Parameter - 5 data (Low Byte)
9
Status Parameter - 5 data (Hi Byte)
10
Status Parameter - 6 data (Low Byte)
11
Status Parameter - 6 data (Hi Byte)
147
0
Status Parameter - 1 data (Low Byte)
1
Status Parameter - 1 data (Hi Byte)
2
Status Parameter - 2 data (Low Byte)
3
Status Parameter - 2 data (Hi Byte)
4
Status Parameter - 3 data (Low Byte)
5
Status Parameter - 3 data (Hi Byte)
6
Status Parameter - 4 data (Low Byte)
7
Status Parameter - 4 data (Hi Byte)
8
Status Parameter - 5 data (Low Byte)
9
Status Parameter - 5 data (Hi Byte)
10
Status Parameter - 6 data (Low Byte)

SD300 - ETHERNET MODULE
POWER ELECTRONICS
36
ETHERNET IP
Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
11
Status Parameter - 6 data (Hi Byte)
12
Status Parameter - 7 data (Low Byte)
13
Status Parameter - 7 data (Hi Byte)
148
0
Status Parameter - 1 data (Low Byte)
1
Status Parameter - 1 data (Hi Byte)
2
Status Parameter - 2 data (Low Byte)
3
Status Parameter - 2 data (Hi Byte)
4
Status Parameter - 3 data (Low Byte)
5
Status Parameter - 3 data (Hi Byte)
6
Status Parameter - 4 data (Low Byte)
7
Status Parameter - 4 data (Hi Byte)
8
Status Parameter - 5 data (Low Byte)
9
Status Parameter - 5 data (Hi Byte)
10
Status Parameter - 6 data (Low Byte)
11
Status Parameter - 6 data (Hi Byte)
12
Status Parameter - 7 data (Low Byte)
13
Status Parameter - 7 data (Hi Byte)
14
Status Parameter - 8 data (Low Byte)
15
Status Parameter - 8 data (Hi Byte)
The description of the bit data for the 0, 1 byte of 70, 71, 110, 111 is
shown in the table below:
Name
Description
Related Attribute
Class
Attr. ID
Faulted
Inverter Error
0x29
10
Warning
Not Supported
0x29
11
Running1
Motor is running Forward
0x29 7 Running2
Motor is running Reverse
0x29 8 Ready
Motor is ready to running
0x29 9 Ctrl From Net
Run/Stop control
0x29
15
Ref From Net
Speed control
0x2A
29
At Reference
Reach at reference Speed
0x2A 3 Drive State
Current Motor State
0x29 6 Speed Actual
Speed Command
0x2A
7

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
37
Output instance
Command data sent periodically from the PLC or a Client to the drive.
Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
20
0
Fault
Reset
Run
Fwd 1 0 2 Speed Reference (Low Byte) - RPM unit
3
Speed Reference (High Byte) - RPM unit
21
0
NetRef
(note2)
NetCtrl
(note2)
Fault
Reset
Run
Rev
Run
Fwd
1
0
2
Speed Reference (Low Byte) - RPM unit
3
Speed Reference (High Byte) - RPM unit
100
0
Fault
Reset
Run
Fwd 1 0 2 Speed Reference (Low Byte) - Hz unit
3
Speed Reference (High Byte) - Hz unit
101
0 NetRef
NetCtrl
Fault
Reset
Run
Rev
Run
Fwd 1 0
2
Speed Reference (Low Byte) - Hz unit
3
Speed Reference (High Byte) - Hz unit
121
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
122
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
2
Control Parameter - 2 data (Low Byte)
3
Control Parameter - 2 data (Hi Byte)
123
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
2
Control Parameter - 2 data (Low Byte)
3
Control Parameter - 2 data (Hi Byte)
4
Control Parameter - 3 data (Low Byte)
5
Control Parameter - 3 data (Hi Byte)
124
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
2
Control Parameter - 2 data (Low Byte)
3
Control Parameter - 2 data (Hi Byte)

SD300 - ETHERNET MODULE
POWER ELECTRONICS
38
ETHERNET IP
Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
4
Control Parameter - 3 data (Low Byte)
5
Control Parameter - 3 data (Hi Byte)
6
Control Parameter - 4 data (Low Byte)
7
Control Parameter - 4 data (Hi Byte)
125
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
2
Control Parameter - 2 data (Low Byte)
3
Control Parameter - 2 data (Hi Byte)
4
Control Parameter - 3 data (Low Byte)
5
Control Parameter - 3 data (Hi Byte)
6
Control Parameter - 4 data (Low Byte)
7
Control Parameter - 4 data (Hi Byte)
8
Control Parameter - 5 data (Low Byte)
9
Control Parameter - 5 data (Hi Byte)
126
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
2
Control Parameter - 2 data (Low Byte)
3
Control Parameter - 2 data (Hi Byte)
4
Control Parameter - 3 data (Low Byte)
5
Control Parameter - 3 data (Hi Byte)
6
Control Parameter - 4 data (Low Byte)
7
Control Parameter - 4 data (Hi Byte)
8
Control Parameter - 5 data (Low Byte)
9
Control Parameter - 5 data (Hi Byte)
10
Control Parameter - 6 data (Low Byte)
11
Control Parameter - 6 data (Hi Byte)
127
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
2
Control Parameter - 2 data (Low Byte)
3
Control Parameter - 2 data (Hi Byte)
4
Control Parameter - 3 data (Low Byte)
5
Control Parameter - 3 data (Hi Byte)
6
Control Parameter - 4 data (Low Byte)
7
Control Parameter - 4 data (Hi Byte)
8
Control Parameter - 5 data (Low Byte)
9
Control Parameter - 5 data (Hi Byte)
10
Control Parameter - 6 data (Low Byte)
11
Control Parameter - 6 data (Hi Byte)
12
Control Parameter - 7 data (Low Byte)
13
Control Parameter - 7 data (Hi Byte)

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
39
Instance
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
128
0
Control Parameter - 1 data (Low Byte)
1
Control Parameter - 1 data (Hi Byte)
2
Control Parameter - 2 data (Low Byte)
3
Control Parameter - 2 data (Hi Byte)
4
Control Parameter - 3 data (Low Byte)
5
Control Parameter - 3 data (Hi Byte)
6
Control Parameter - 4 data (Low Byte)
7
Control Parameter - 4 data (Hi Byte)
8
Control Parameter - 5 data (Low Byte)
9
Control Parameter - 5 data (Hi Byte)
10
Control Parameter - 6 data (Low Byte)
11
Control Parameter - 6 data (Hi Byte)
12
Control Parameter - 7 data (Low Byte)
13
Control Parameter - 7 data (Hi Byte)
14
Control Parameter - 8 data (Low Byte)
15
Control Parameter - 8 data (Hi Byte)
The description of the bit data for the 0 byte of 20, 21, 100 and 101 is
shown in the table below:
Name
Description
Related Attribute
Class
Attr. ID
Run Fwd
[2]
Forward Run Command
0x29 3 Run Rev
[2]
Reverse Run Command
0x29 4 Fault reset
[2]
Fault Reset Command
0x29
12
NetRef
Not used
0x2A 4 NetCtrl
[3]
Not used
0x29 5 Speed Reference
Speed Command
0x2A
8
[2] Refer to the Drive Run and Fault in the Control Supervisor Object (Class
0x29).
[3] The setting of the Reference Control and Run/Stop Control can only be
made by the LCD Control Panel. Therefore, NetRef and NetCtrl are not used
at the Instances 21 and 101.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
40
ETHERNET IP
Explicit Messaging
A non-periodic communication method used for reading or writing the
attribute value of the Drive or Ethernet/IP.
The UCMM method can communicate data between Originator and Target
without connection, in addition a periodic data communication method
using Class 3 Connection are available.
Supported Objects: Identity, Motor Data, Control Supervisor, AC Drive and
Class 0x64 – Manufacture Profile.
Identity object (Class 0x01, Instance 1)
Attributes:
ID
Access
Attribute Name
Length
Value
1
Get
Vendor ID
(Power Electronics)
Word
259
2
Get
Device Type (AC Drive)
Word 2 3
Get
Product Code
Word
10
[1]
4
Get
Low Byte - Major revision
High Byte - Minor revision
Word
0x0102
[2]
5
Get
Status
Word
See “Status bits”
definition below.
6
Get
Serial Number
Double
Word
See “Service
Codes”
definition below
7
Get
Product Name
12 Bytes
SD300 Ethernet
[1] Product code ‘6’ means SD300 AC drive.
[2] The Upper and Lower byte represent the Major Revision and Minor
Revision, respectively. For example, 0x0102 means 2.01. The version of the
Ethernet communication is indicated in CM.6.
POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
41
Status bits (definition of each bit of status):
Bit
Definition
0
0: Device is not connected to Master.
1: Device is connected to Master.
1
Reserved
2
Configured (always ‘0’ since Ethernet/IP is not supported.)
3
Reserved
4
0: Unknown
2: in case of incorrect I/O connection.
3: in case of no previous I/O connection at all.
5: Major Fault
6: I/O in connection.
5
6 7 8
Minor Recoverable Fault (In case of Warning state of inverter)
9
Minor Unrecoverable Fault (N/A)
10
Major Recoverable Fault (In case of H/W trip state of inverter)
11
Major Unrecoverable Fault
(In case of trip state except for H/W trip of inverter)
Service codes:
Service Code
Definition
Support for
Class
Support for
Instance
0x0E
Get Attribute Single
No
Yes
0x05
Reset
No
Yes
0x10
Set Attribute Single
No
Yes
Serial number is made by last four numbers of MAC ID.
For example, if MAC ID is 00:0B:29:00:00:22, Serial number will be
0x29000022.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
42
ETHERNET IP
Motor data object (Class 0x28, Instance 1)
Attributes:
Attribute ID
Access
Attribute
Name
Range
Definition
3
Get
Motor
Type
0~10
0: Non-standard motor
1: PM DC Motor
2: FC DC Motor
3: PM Synchronous Motor
4: FC Synchronous Motor
5: Switched Reluctance Motor
6: Wound Rotor Induction Motor
7: Squirrel Cage Induction Motor
8: Stepper Motor
9: Sinusoidal PM BL Motor
10: Trapezoidal PM BL Motor
6
Get/Set
Motor
Rated
Current
0.0~1
000.0
[Get]
Read Rated Current of bA-13. [Set]
The setting value is reflected on
Rated Current of bA-13 Scale: 0.1
7
Get/Set
Motor
Rated
Voltage
0~
690
[Get]
Read Rated Voltage of bA-15 [Set]
The setting value is reflected on
Rated Voltage of bA-15 Scale: 1
Service codes:
Service Code
Definition
Support for
Class
Support for
Instance
0x0E
Get Attribute Single
No
Yes
0x10
Set Attribute Single
No
Yes

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
43
Control supervisor object (Class 0x29, Instance
1)
Attributes:
Attribute ID
Access
Attribute
Name
Range
Definition
3
Get / Set
Forward
Run Cmd.
0
Stop
1
Operation in normal direction. See
“Drive Run Command” description
below this table.
4
Get / Set
Reverse
Run Cmd.
0
Stop
1
Operation in reverse direction. See
“Drive Run Command” description
below this table.
5
N/A
Net
Control
-
Can be set up as Drive parameter
only.
6
Get
Drive
State
0
Vendor specific
1
Startup
2
Not Ready (resetting)
3
Ready (stopping)
4
Enabled (running, except
decelerating to stop)
5
Stopping (decelerating to stop)
6
Fault Stop
7
Faulted (tripped)
7
Get
Running
Forward
0
Stopping
1
Operating in normal direction
8
Get
Running
Reverse
0
Stopping
1
Operating in reverse direction
9
Get
Drive
Ready
0
Being reset or tripped
1
Normal condition for
Inverter operation
10
Get
Drive
Fault
0
Presently not tripped
1
Presently being tripped.
12
Get / Set
Drive
Fault
Reset
0
Trip Reset after a trip.
Reset can be done only when
TRUE is inputted in FALSE status.
See “Drive Fault” definition below
this table.
1
13
Get
Drive
Fault
See “Drive Fault” definition below
this table.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
44
ETHERNET IP
Attribute ID
Access
Attribute
Name
Range
Definition
Code
14
Get
Control
From Net.
0
Provide operation reference
through a source other than
FieldBus communication.
1
Provide operation reference
through FieldBus communication
source.
Drive Run Command: It is the drive operation using Forward Run Cmd.
and Reverse Run Cmd.
Run 1
Run 1
Trigger Event
Run Type
0 0 Stop
NA
0 -> 1 0 Run
Run1 0 0 -> 1
Run
Run2
0 -> 1
0 -> 1
No Action
NA 1 1
No Action
NA
1 -> 0 1 Run
Run2 1 1 -> 0
Run
Run1
In the above table, Run1 stands for the Forward Run Cmd. and Run 2
stands for the Reverse Run Cmd. In other words, the Option gives an
operation reference to the drive at the moment of change from
0(FALSE) to 1(TRUE). When the Forward Run Cmd. value has been
read, it does not represent the present operation status of the drive, but
the operation command value of the Option.
Drive Fault: If the drive is tripped, the Drive Fault becomes TRUE. At
this time, the Drive Fault Codes are as follow;
Drive Fault Code:

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
45
Fault Code Number
Description
0x0000
None
0x1000
Ethermal
Out Phase Open
InverterOLT
InPhaseOpen
Thermal Trip
UnderLoad
ParaWriteTrip
IOBoardTrip
PrePIDFail
OptionTrip1
OptionTrip2
OptionTrip3
LostCommand
UNDEFINED
LostKeypad
0x2200
OverLoad
0x2310
OverCurrent1
0x2330
GFT
0x2340
OverCurrent2
0x3210
OverVoltage
0x3220
LowVoltage
0x2330
GroundTrip
0x4000
NTCOpen
0x4200
OverHeat
0x5000
FuseOpen HWDiag
0x7000
FanTrip
0x7120
No Motor Trip
0x7300
EncoderTrip
0x8401
SpeedDevTrip
0x8402
OverSpeed
0x9000
ExternalTrip BX
Drive Fault Reset:
At 0 1 (FALSE TRUE), the Drive Fault Reset gives TRIP RESET
reference to the drive. Overwriting 1 (TRUE) on 1 (TRUE) does not
generate RESET reference to the drive trip. To send RESET reference
from Option to drive in 1 (TRUE) status, write 0 (FAULT) and then write
1(TRUE) again.
Service:
Service Code
Definition
Support for Class
Support for Instance
0x0E
Get Attribute
Single
No
Yes
0x10
Set Attribute
Single
No
Yes

SD300 - ETHERNET MODULE
POWER ELECTRONICS
46
ETHERNET IP
AC Drive Object (Class 0x2A; Instance 1)
Attributes:
Attribute ID
Access
Attribute
Name
Range
Definition
3
Get
At
Reference
0
The output frequency has not
reached the set up frequency, yet.
1
The output frequency has reached
the set up frequency.
4
Not
supported
Net
Reference
-
-
6
Get
Drive
Mode
[1]
0
Vendor specific mode
1
Open Loop
Speed (Frequency)
2
Closed Loop Speed Control
3
Torque Control
4
Process Control (e.g. PI)
7
Get
Actual
Speed
0-24000
Displayed present output frequency
in [rpm] unit
8
Get/Set
Speed Ref.
0-24000
Give reference after converting the
target frequency in [rpm] unit. For
this, the DRV-07 Freq Ref Src must
have been set up to FieldBus
9
Get
Actual
Current
0-111.0
A
Monitor present current by 0.1 A
unit basis.
29
Get
Ref. from
Network
0
The frequency reference source is
not the FieldBus communication.
1
The frequency reference source is
the FieldBus communication.
100
Get
Actual Hz
0-400.00
Hz
Monitor present operating
frequency by Hz unit.
101
Get/Set
Reference
Hz
0-400.00
Hz
When the dr-07 Freq Ref Src is set
to FieldBus, the reference
frequency can be set up by
communication.
102
Get/Set
Acceleration
Time
[2]
0-6000.0
s
Set-up/monitor Inverter
acceleration time.
[1] It is related with dr-10 Torque Control and AP-01 App mode. If the dr-10 Torque Control
is set to ‘Yes,’ Drive Mode becomes “Torque Control,” and if AP-01 App mode is set to
Proc PID, the Drive Mode becomes “Process Control (e.g.PI).”
[2] dr-03: Acc Time value.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
ETHERNET IP
47
Attribute ID
Access
Attribute
Name
Range
Definition
103
Get/Set
Deceleration
Time
[3]
0-6000.0
s
Set-up/monitor Inverter
deceleration time.
Service:
Service Code
Definition
Support for Class
Support for Instance
0x0E
Get Attribute
Single
No
Yes
0x10
Set Attribute
Single
No
Yes
[3] dr-04: Dec Time value.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
48
ETHERNET IP
Class 0x64 (Drive Object) – Manufacture Profile
This is the object to access Keypad Parameters of the Inverter.
Attributes:
Attribute ID
Access
Attribute
Name
Range
Definition
1 (dr Group)
Get/Set
Identical to
SD300
Manual
Code No.
SD300 Keypad
Title (Refer to
SD300 Manual)
Setting range of SD300
Parameter (Refer to
SD300 Manual)
2 (bA Group)
3 (Ad Group)
4 (Cn Group)
5 (In Group)
6 (OU Group)
7 (CM Group)
8 (AP Group)
9 (Reserved)
10 (Reserved)
11 (PRT Group)
Identical to
SD300
Manual
Code No.
12 (M2 Group)
Service:
Service Code
Definition
Support for Class
Support for Instance
0x0E
Get Attribute
Single
No
Yes
0x10
Set Attribute
Single
No
Yes

POWER ELECTRONICS
SD300 - ETHERNET MODULE
PARAMETERS CONFIGURATION
49
6. PARAMETERS
CONFIGURATION
Drive parameters related to Modbus/TCP and Ethernet/IP communication
are listed below. Protocol ‘M’ is used for Modbus/TCP and Protocol ‘E’ is
used for Ethernet/IP.
Note: For further information about SD300 programming parameters, please
refer to the Getting Started Manual.
Screen
Description
Default
value
Range
Function
Protocol
CM.6
Communicatio
n S/W version
0.00
-
Show the software version of the optional
Ethernet communication module.
M/E
CM.9
LED status
-
-
Show the ON/OFF data of the LED on the
Ethernet communication module depending
on the active protocol:
MODBUS TCP:
ON/OFF state of 4 LEDs in SD300 Ethernet
communication module is displayed at
keypad parameter CM.9.
If you check CM.9 with Keypad, 4 bits can
be seen according to the order of LED of
CM.9 (Left -> Right) CPU, ERR, SPEED and
LINK LED.
When LED is ON, the bit becomes 1 and
when OFF, it becomes 0.
M/E
6

SD300 - ETHERNET MODULE
POWER ELECTRONICS
50
PARAMETERS CONFIGURATION
Screen
Description
Default
value
Range
Function
Protocol
ETHERNET IP:
It represents the ON/OFF status of the 2
LEDs on the right side among the 4 LEDs on
the keypad parameter CM.9. 4 bits can be
displayed in CM.9 by using keypad. The
data list of CM.9 are shown below. When
LED turns on, each bit becomes 1, and vice
versa. Ethernet communication module has
MS LED and NS LED only, but 4 LEDs are
shown from CM.9 using keypad.
It displays the information of NS LED Red,
NS LED Green, MS LED Red and MS LED
Green in the order of CM.9 LEDs (Right *
Left).
If CM.9 is displayed as below, it indicates
that NS LED is currently Green and MS LED
is Green.
Example 1: CM.9 LED in Modbus TCP
operation.
LED STATE
LINK
SPEED
ERR
CPU
OFF
ON
OFF
ON
Note: Continues on the next page.

POWER ELECTRONICS
SD300 - ETHERNET MODULE
PARAMETERS CONFIGURATION
51
Screen
Description
Default
value
Range
Function
Protocol
Note: Comes from the previous page.
Example 2: CM.9 LED in Ethernet IP
operation
LED STATE
MS (Red)
MS
(Green)
NS (Red)
NS
(Green)
OFF
ON
OFF
ON
CM.10
Opt
Parameter1
0
0 to
255
The IP version supported by Ethernet
Module is v4.
All the addresses and masks are expressed
in (decimal).(decimal).(decimal).(decimal)
and each decimal number is within 0~255.
In Ethernet communication Module, decimal
numbers can be entered directly in Opt
Parameter. The opt parameters acceptable
values range is from 0 to 255, which is
implemented with each field of addresses
divided with ‘.’.
Example. To set up IP Address
196.168.10.131, enter the Opt Parameter as
shown in the table below.
Note: Continues on the next page.
M/E
CM.11
Opt
Parameter2
0
0 to
255
M/E
CM.12
Opt
Parameter3
0
0 to
255
M/E
CM.13
Opt
Parameter4
0
0 to
255
M/E
CM.14
Opt
Parameter5
0
0 to
255
M/E
CM.15
Opt
Parameter6
0
0 to
255
M/E
CM.16
Opt
Parameter7
0
0 to
255
M/E
CM.17
Opt
Parameter8
0
0 to
255
M/E
CM.18
Opt
Parameter9
0
0 to
255
M/E

SD300 - ETHERNET MODULE
POWER ELECTRONICS
52
PARAMETERS CONFIGURATION
Screen
Description
Default
value
Range
Function
Protocol
CM.19
Opt
Parameter10
0
0 to
255
Note: Comes from the previous page.
Code
number
Name of
parameter
Input
value
CM.10
Opt
Parameter1
196
CM.11
Opt
Parameter 2
168
CM.12
Opt
Parameter 3
10
CM.13
Opt
Parameter 4
131
Use the following parameter groups to set up
the communication addresses of your
equipment:
• CM.10-13: Set up the IP address.
• CM.14-17: Set up the subnet mask.
• CM.18-21: Set up the gateway
address.
M/E
CM.20
Opt
Parameter11
0
0 to
255
M/E
CM.21
Opt
Parameter12
0
0 to
255
M/E
CM.22
Opt
Parameter13
0
0 to 2
Set up the Ethernet communication rate:
Option
Description
0
Set the speed automatically
1
100Mbps
2
10Mbps
Automatic speed setting function
automatically sets up the highest speed in
the network.
M/E

POWER ELECTRONICS
SD300 - ETHERNET MODULE
PARAMETERS CONFIGURATION
53
Screen
Description
Default
value
Range
Function
Protocol
CM.29
CIP Input
Instance
1
0 to 11
This parameter is displayed when the
protocol is set to Ethernet/IP. It sets up the
data format of the drive status sent from the
drive to the Client (Originator) during the I/O
communication module of the CIP (Common
Industrial Protocol). Refer to the Assembly
Object:
Set
value
Input
value
Data
size
Number of
parameters
0
70 4 X 1 71 4 X 2 110 4 X 3 111 4 X 4 141 2 1 5 142 4 2 6 143 6 3 7 144 8 4 8 145
10 5 9
146
12 6 10
147
14 7 11
148
16
8
E
CM.30
Output
parameters
number
3
0 to 8
Configure a group of addresses to read
several output parameters at once. The user
must set the number of parameters and then
configure them in CM.31-38. This value is
conditioned to CM.29.
E
CM.31
[1]
Status
parameters 1
to 8
0x000A
0x000
0 to
0xFFF
F
These parameters are not used in Modbus
TCP.
Define the output parameter group for data
transmission, so that addresses configured
in CM.31-38 can be used to send several
parameters at once in the same
communications frame.
E
CM.32
[1]
0x000
D
E
CM.33
[1]
0x000F
E
CM.34
[1]
0x0000
E
[1] Only parameters corresponding to the value set in CM.30 will be shown
(E.g., if CM.30 = 3, parameters CM.31, CM.32 and CM.33 will be shown).

SD300 - ETHERNET MODULE
POWER ELECTRONICS
54
PARAMETERS CONFIGURATION
Screen
Description
Default
value
Range
Function
Protocol
CM.35
[1]
0x0000
The size of the group is set in CM.30.
E
CM.36
[1]
0x0000
E
CM.37
[1]
0x0000
E
CM.38
[1]
0x0000
E
CM.49
CIP Output
Instance
1
0 to 11
This parameter is displayed only when the
protocol is set to Ethernet IP. It sets up the
data format of the drive command sent from
the Client (Originator) to control the drive
during the I/O communication module of the
CIP (Common Industrial Protocol). Refer to
the Assembly Object:
Set
value
Input
value
Data
size
Number of
parameters
0
20 4 X 1 21 4 X 2 100 4 X 3 101 4 X 4 121 2 1 5 122 4 2 6 123 6 3 7 124 8 4 8 125
10 5 9
126
12 6 10
127
14 7 11
128
16 8
E
CM.50
Number of
input
parameters
2
0 to 8
Configure a group of addresses to read
several input parameters at once. The user
must set the number of parameters and then
configure them in CM.51-58. This value is
conditioned to CM.49.
E

POWER ELECTRONICS
SD300 - ETHERNET MODULE
PARAMETERS CONFIGURATION
55
Screen
Description
Default
value
Range
Function
Protocol
CM.51
[2]
Control
parameters 1
to 8.
0x0005
0x000
0 to
0xFFF
F
These parameters are not used in Modbus
TCP.
Define the input parameter group for data
transmission, so that addresses configured
in CM.51-58 ca be used to send several
parameters at once in the same
communications frame.
The size of the group is set in CM.50.
E
CM.52
[2]
0x0006
E
CM.53
[2]
0x0000
E
CM.54
[2]
0x0000
E
CM.55
[2]
0x0000
E
CM.56
[2]
0x0000
E
CM.57
[2]
0x0000
E
CM.58
[2]
0x0000
E
CM.94
Communicatio
ns update
N
NO
YES
This parameter enables sending the current
drive data configuration to the Ethernet
communication module.
M/E
[2] Only parameters corresponding to the value set in CM.50 will be shown
(E.g., if CM.50 = 2, parameters CM.51 and CM.52 will be shown).

SD300 - ETHERNET MODULE
POWER ELECTRONICS
56
LOST COMMAND
7. LOST COMMAND
Drive Keypad Parameters
Code
Number
Name /
Description
Default
Set Value
Function
Pr-12
RIRLs /
Response in
case of a speed
reference loss
“None”
0
None
1
Free-Run
2
Dec
3
Hold Input
4
Hold Output
5
Lost Preset
Set the action to be taken if the
drive loses a speed reference. See
“Lost Command Mode” below.
Caution: Users should
ensure that disabling this
protection does not compromise
the operation of the equipment.
Pr-13
RfLsDl / Lost
reference delay
1.0
0.1-120.0 s
Delay time setting after which the
speed reference loss protection will
enable.
Pr-14
RfLRf /
Reference for
lost reference
0
0-400.00 Hz
In order to set the frequency value
at which the drive will operate in
case a speed reference loss
occurs. Therefore, the parameter
Pr.12 must be set to ‘LostPreset’.
Lost Command Mode:
Code Number
Description
“None”
Protection is disabled.
“Free-Run”
The drive cuts the output voltage and allows the motor free run.
“Dec”
The motor decelerates and then stops at the time set at G9.7 (Pr.7).
“Hold Input”
The drive will keep operating to the input value, mean value obtained from
the last 10 seconds until the moment the reference loss has been detected.
“Hold Output”
The drive will keep operating to the input value, mean value obtained from
the last 10 seconds until the moment the reference loss has been detected.
“Lost Preset”
The drive operates to the frequency defined in parameter G9.14 (Pr.14).
7

POWER ELECTRONICS
SD300 - ETHERNET MODULE
LOST COMMAND
57
Modbus/TCP Lost Command Status
If the Modbus TCP receives no data from Client for 100msec, the Option
becomes Lost Command status, and after the time set up in the Pr-13,
the Drive operates according to the settings in the Pr-12.
Ethernet/IP Lost Command Status
If there is no Implicit Message Connection (Class1 Connection) between
the Originator (PLC or Client) and Target (Drive), the Option becomes
Lost Command status, and after the time set up in the Pr-13, the drive
operates according to the settings in the Pr-12.

SD300 - ETHERNET MODULE
POWER ELECTRONICS
58
CONFIGURATION REGISTER
8. CONFIGURATION REGISTER
VARIABLE SPEED DRIVE: SD300.
SERIAL Nº: MODEL:
APPLICATION:
DATE:
CUSTOMER:
NOTES:
PARAMETER /
DESCRIPTION
DEFAULT
VALUE
SETTING 1
SETTING 2
CM: Communication Bus
CM.6
Communication S/W version
0.00
__________________
__________________
CM.9
LED status
-
__________________
__________________
CM.10
Opt Parameter1
0
__________________
__________________
CM.11
Opt Parameter2
0
__________________
__________________
CM.12
Opt Parameter3
0
__________________
__________________
CM.13
Opt Parameter4
0
__________________
__________________
CM.14
Opt Parameter5
0
__________________
__________________
CM.15
Opt Parameter6
0
__________________
__________________
CM.16
Opt Parameter7
0
__________________
__________________
CM.17
Opt Parameter8
0
__________________
__________________
CM.18
Opt Parameter9
0
__________________
__________________
8

POWER ELECTRONICS
SD300 - ETHERNET MODULE
CONFIGURATION REGISTER
59
PARAMETER /
DESCRIPTION
DEFAULT
VALUE
SETTING 1
SETTING 2
CM.19
Opt Parameter10
0
__________________
__________________
CM.20
Opt Parameter11
0
__________________
__________________
CM.21
Opt Parameter12
0
__________________
__________________
CM.22
Opt Parameter13
0
__________________
__________________
CM.29
CIP Input Instance
1
__________________
__________________
CM.30
Output parameters number
3
__________________
__________________
CM.31
Status parameter 1
0x000A
__________________
__________________
CM.32
Status parameter 2
0x000D
__________________
__________________
CM.33
Status parameter 3
0x000F
__________________
__________________
CM.34
Status parameter 4
0x0000
__________________
__________________
CM.35
Status parameter 5
0x0000
__________________
__________________
CM.36
Status parameter 6
0x0000
__________________
__________________
CM.37
Status parameter 7
0x0000
__________________
__________________
CM.38
Status parameter 8
0x0000
__________________
__________________
CM.49
CIP Output Instance
1
__________________
__________________
CM.50
Number of input parameters
2
__________________
__________________
CM.51
Control parameter 1
0x0005
__________________
__________________
CM.52
Control parameter 2
0x0006
__________________
__________________
CM.53
Control parameter 3
0x0000
__________________
__________________
CM.54
Control parameter 4
0x0000
__________________
__________________

SD300 - ETHERNET MODULE
POWER ELECTRONICS
60
CONFIGURATION REGISTER
PARAMETER /
DESCRIPTION
DEFAULT
VALUE
SETTING 1
SETTING 2
CM.55
Control parameter 5
0x0000
__________________
__________________
CM.56
Control parameter 6
0x0000
__________________
__________________
CM.57
Control parameter 7
0x0000
__________________
__________________
CM.58
Control parameter 8
0x0000
__________________
__________________
CM.94
Communications update
N
__________________
__________________

24h Technical Assistance 365 days a year
Find your nearest delegation: http://power-electronics.com/contact/
Follow us on:

 Loading...
Loading...