

Philips TDA5149G Datasheet

INTEGRATED CIRCUITS
DATA SH EET
TDA5149G
12 V Voice Coil Motor (VCM) driver
and spindle motor pre-driver
combination chip
Product specification
File under Integrated Circuits, IC11
1996 May 06

Philips Semiconductors Product specification
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
FEATURES
General features
• Single-chip voice coil motor driver and spindle motor
pre-driver
• Internal voltage reference generator
• Programming of timing parameters via the serial bus
• Control of sleep, brake and disable modes for both the
VCM and spindle via the serial bus
• Temperature monitor circuit
• General purpose uncommitted operational amplifier.
Voice coil motor driver
• On-board full-bridge power DMOS driver with low R
• Class AB linear amplifier with no dead zone
• Adjustable gain and bandwidth
• Retract circuit operating at power-down.
Spindle motor pre-driver
• Designed to drive external N-channel power MOSFETs
for brushless, sensorless DC motors
• Internal or external commutation control
• Digital commutation timing
• Average motor supply current control with Pulse Width
Modulation (PWM)
• Soft switching under PWM control
• Spindle brake after park at power-down.
DSon
APPLICATIONS
• 12 V high-performance hard disk drives.
GENERAL DESCRIPTION
The TDA5149G is a combination of a voice coil motor
driver and a spindle motor pre-driver, capable of operating
12 V high-performance hard disk drives.
The device integrates a spindle pre-driver that drives three
external N-channel power MOSFETs in order to drive a
three-phase brushless, sensorless DC motor in full wave
mode. In the normal mode, commutations are generated
from the internal Back EMF (BEMF) sensing circuitry.
Commutations, however, can also be generated from an
external source, thereby providing the possibility of driving
the motor in the stepper-motor mode.
The VCM driver is a linear transconductance amplifier
capable of handling currents up to 1.65 A. It allows
external adjustment of the gain and compensation.
The TDA5149G also contains two drivers for a latch that
secures the heads in the event of power-down.
To control functions such as park, brake, sleep or disable
and to program the different timing parameters, the
TDA5149G is provided with a three-wire serial port. A high
precision voltage monitor is also included, for both
5 and 12 V power supplies. Finally, the IC contains a
temperature monitor circuit and an uncommitted
operational amplifier connected to VDD, which can be used
freely within the application. The device is contained in a
LQFP64 package with 4 pins connected to the lead frame
for improved heat dissipation.
TDA5149G
QUICK REFERENCE DATA
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
DD
V
DDD
V
DDA1
I
oVCM
R
DSon
ORDERING INFORMATION
TYPE
NUMBER
TDA5149G LQFP64 plastic low profile quad flat package; 64 leads; body 10 × 10 × 1.4 mm SOT314-2
1996 May 06 2
general supply voltage (pin 54) 10.8 12.0 13.2 V
digital supply voltage (pin 55) 4.5 5.0 5.5 V
analog supply voltage (pin 27) 4.5 5.0 5.5 V
voice coil motor output current − − 1.65 A
VCM power DMOS total on-resistance
(including leads and bond wires)
NAME DESCRIPTION VERSION
Tj= 25 °C − − 0.65 Ω
Tj= 125 °C − − 1.1 Ω
PACKAGE
Philips Semiconductors Product specification
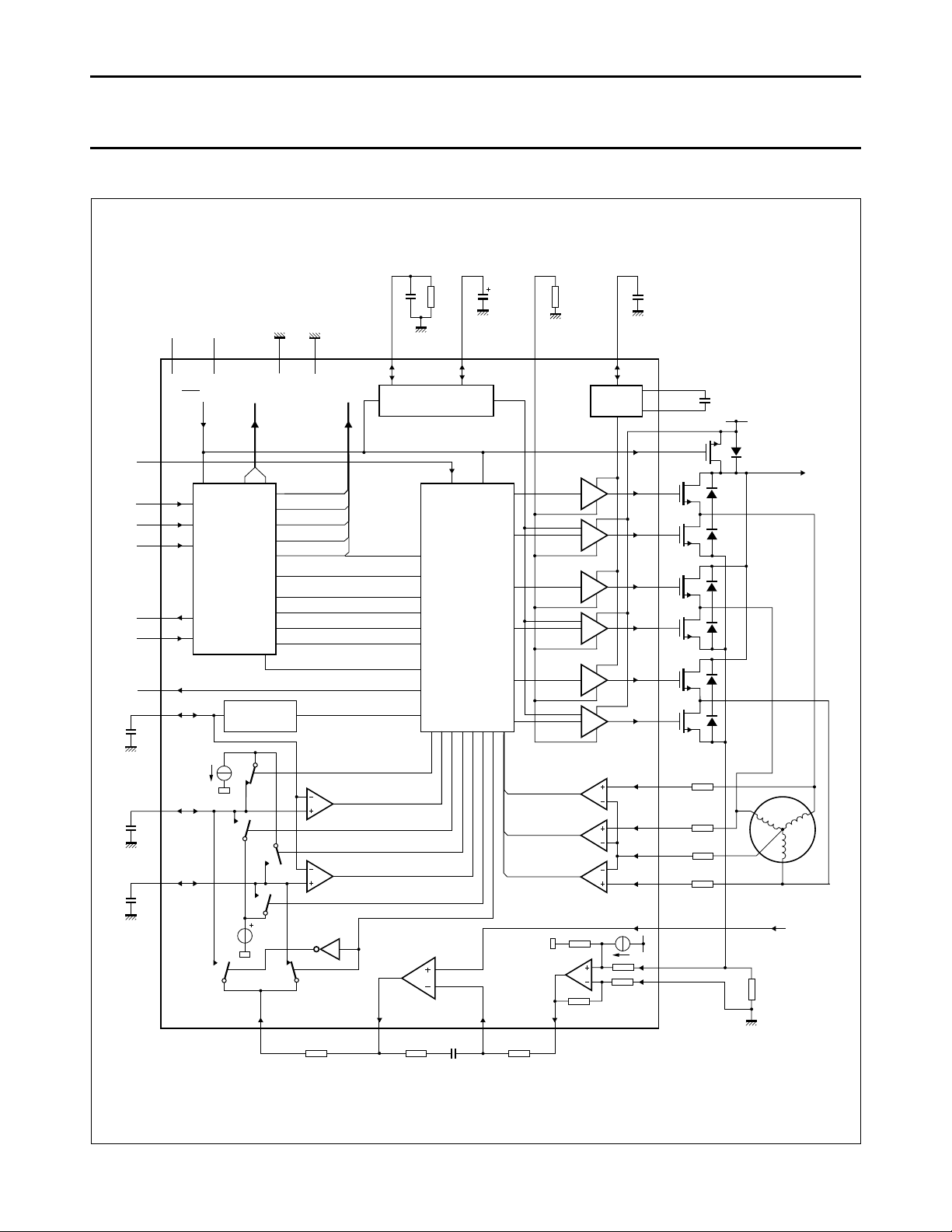
Fig.1 Block diagram of the spindle part.
handbook, full pagewidth
MGE657
SAWTOOTH
OSCILLATOR
SERIAL
PORT
VPARK
VCM_CONT1
VCM_CONT2
VGAINSEL
SLEEP
COMMUT. DELAYS
SBRAKE
SDISABLE
SPINMODE
COMMCLOCK
INIT
TRIGGER
CSS2 dis
SPWM comp 1
SPWM comp 2
CSS2 short
CSS1 dis
CSS1 short
LOOP1 select
CHARGE
PUMP
BRAKE
DELAY
22
CSS1
CSS2
23
STOSC
24
FG
57
SCANTEST
56
SCANOUT
25
SENABLE
61
SDATA
59
SCLOCK
60
CLOCK
58
54
V
DD
45
H0
3
H1
5
L1
6
H2
8
L2
9
H3
11
L3
4
MOT1
7 MOT2
2
MOT0
10
MOT3
19
ISPIN
13
14
SPINSENSEH
SPINSENSEL
63
62
CAPX2
CAPX1
12 V
CLAMP
to the
VCM
MOT1
MOT2
MOT3
3 kΩ
3 kΩ
1 kΩ
3 kΩ
from the
PWM DAC
R
sense
1
CAPY
IDRIVE
12
BRAKEPOWER
BRAKEDELAY
AGND
DGND
64
16
51
47
V
DDA1
V
DDD
55
27
from the
POR circuit
to the
LATCH
to the
VCM
DIGITAL
CONTROL
21
RPOS
20
SICOMP
18
SINTIN
15
SISENS
5×
INTG
COMP
COMP
BEMF comp 1
BEMF comp 2
BEMF comp 3
DRIVER
DRIVER
DRIVER
DRIVER
DRIVER
DRIVER
COMP
COMP
COMP
0.4 V
LACTIVE
LHOLD
TDA5149G
1
2
3
1
2
3
4
5
BLOCK DIAGRAMS
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
TDA5149G
1996 May 06 3

Philips Semiconductors Product specification
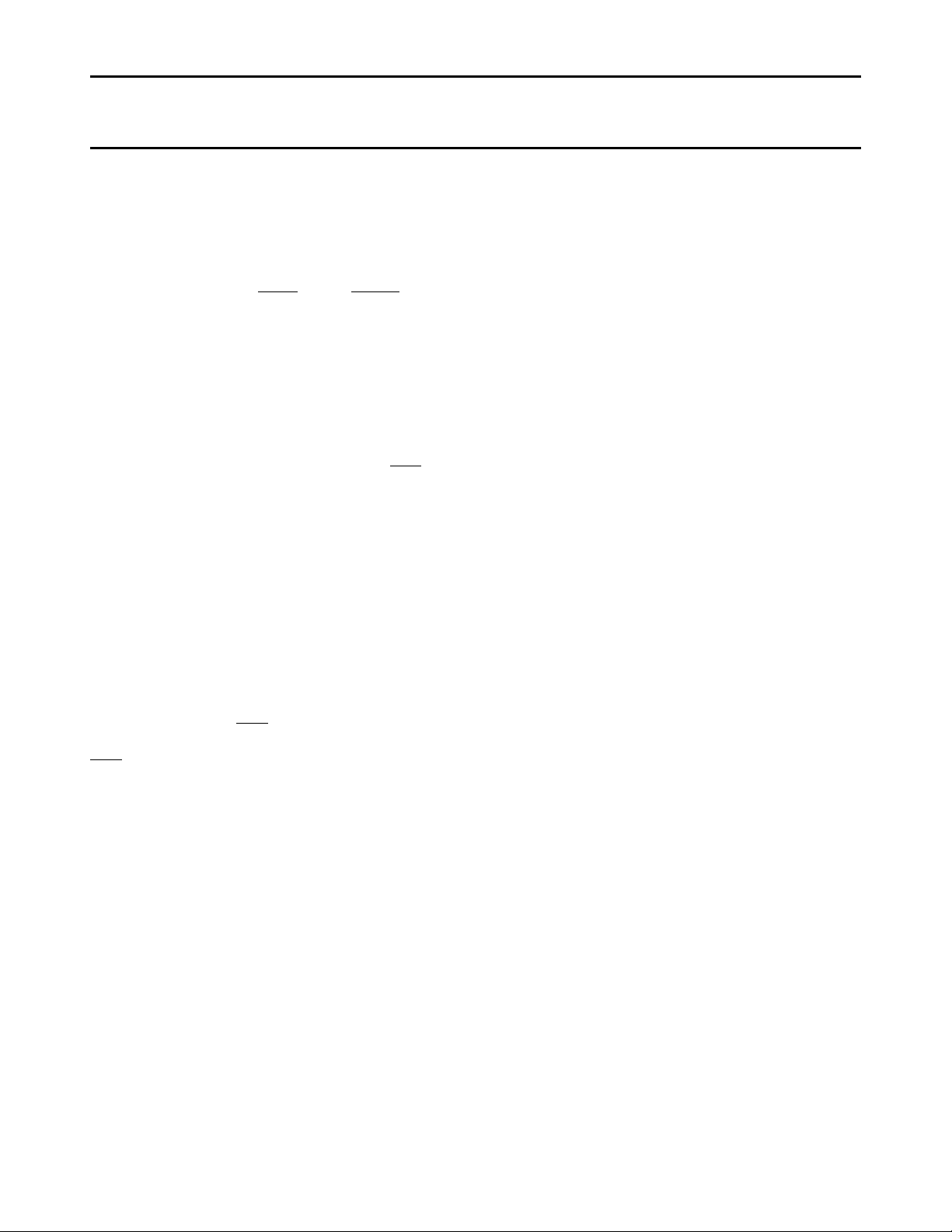
Fig.2 Block diagram of the VCM and RESET circuits.
handbook, full pagewidth
MGE656
M
FOLLOWER
FOLLOWER
PREAMP
PREAMP
PARK
CIRCUITRY
SENSE
BUFFER
REFERENCE
CURRENT
GENERATOR
REFERENCE
VOLTAGE
GENERATOR
LATCH
CIRCUITRY
LACTIVE LHOLD
from the
serial port
TEMPERATURE
SENSOR
POWER-
ON RESET
GENERATOR
OPAMP
to the
PARK
circuit
COMP
COMP
+5 V
+12 V
+12 v
from the
serial port
from the
POR circuit
C
comp
R
comp
V
CMIN2
V
CMIN1
R
fb
V
CMSENSOUT
VCM
ref
V
ref(o)
I
ref
POR12
ADJ
POR5
ADJ
VCM_CONT1
VCM_CONT2
AMPIN−
AMPIN+
AMPOUT
CLAMP
PGND1
V
DDV
V
CM+
V
CM−
PGND2
V
CMSENSEL
V
CMSENSEH
latch
LATCHACTIV
LATCHHOLD
TEMPMON
RESETPRESETA
POR
DELAY
26 35 34
37
52
53
42
48
43
44
39
36
32
38
33
31
30
40
41
50
46
49
17
29
28
100 nF
R
8
from the
spindel
27 Ω
100 nF
27 Ω
R
in2
R
in1
VCM
input
VCM
reference
input
TDA5149G
disable
park
brake
V
GAINSEL
V
CMref
R
R
*
20 kΩ
23 kΩ
50 kΩ
10 kΩ
10 kΩ
50 kΩ
−
+
−
+
−
+
+
−
−
+
−
+
+5 V
+12 V
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
TDA5149G
1996 May 06 4

Philips Semiconductors Product specification
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
PINNING
SYMBOL PIN I/O DESCRIPTION
CAPY 1 I/O charge pump capacitor
MOT0 2 I motor centre tap input
H1 3 O driver output to gate of upper power FET 1
MOT1 4 I back EMF comparator input 1
L1 5 O driver output to gate of lower power FET 1
H2 6 O driver output to gate of upper power FET 2
MOT2 7 I back EMF comparator input 2
L2 8 O driver output to gate of lower power FET 2
H3 9 O driver output to gate of upper power FET 3
MOT3 10 I back EMF comparator input 3
L3 11 O driver output to gate of lower power FET 3
IDRIVE 12 I adjustment for output stage drive current
SPINSENSEH 13 I positive spindle sense amplifier input
SPINSENSEL 14 I negative spindle sense amplifier input
SISENS 15 O spindle sense amplifier output
AGND 16 − general analog ground; note 1
I
ref
SINTIN 18 I negative integrator input
ISPIN 19 I positive integrator input, average current adjustment
SICOMP 20 O integrator output
RPOS 21 I duty cycle modulator input
CSS1 22 I/O soft switching capacitor 1
CSS2 23 I/O soft switching capacitor 2
STOSC 24 I/O sawtooth oscillator capacitor
SCANOUT 25 O test output
POR
DELAY
V
DDA1
POR5
ADJ
POR12
ADJ
AMPIN− 30 I negative input of the uncommitted operational amplifier
AMPIN+ 31 I positive input of the uncommitted operational amplifier
PGND1 32 − power ground 1 for VCM DMOS; note 1
AMPOUT 33 O uncommitted operational amplifier output
RESETP 34 O power-on reset digital output with passive pull-up resistor
RESETA 35 O power-on reset digital output with active pull-up resistor
V
CM−
TEMPMON 37 O temperature monitor output
CLAMP 38 I/O clamp capacitor used for head retraction
V
DDV
V
CMIN2
17 O reference current generator output
26 I/O power-on reset delay capacitor (active LOW)
27 − analog supply voltage 1 (+5 V)
28 O adjustment of POR threshold (for +5 V)
29 O adjustment of POR threshold (for +12 V)
36 O negative output voltage of the VCM power stage
39 − power supply for VCM DMOS driver (+12 V)
40 I switchable VCM control input voltage
TDA5149G
1996 May 06 5

Philips Semiconductors Product specification
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
SYMBOL PIN I/O DESCRIPTION
V
CMIN1
V
CMSENSEH
V
CMSENSEL
V
CM+
H0 45 O gate control of the isolating power FET
VCM
ref
BRAKEPOWER 47 I/O reservoir capacitor for the brake/park circuitry
PGND2 48 − power ground 2 for VCM DMOS; note 1
V
ref(o)
V
CMSENSOUT
BRAKEDELAY 51 I/O powerless brake delay adjustment
LATCHHOLD 52 O latch hold output
LATCHACTIV 53 O latch activate output
V
DD
V
DDD
SCANTEST 56 I test mode input
FG 57 O commutation frequency generator output
CLOCK 58 I clock for digital timing input
SDATA 59 I serial port data input
SCLOCK 60 I serial port clock input
SENABLE 61 I serial port enable input
CAPX2 62 I/O charge pump capacitor input/output
CAPX1 63 I/O charge pump capacitor input/output
DGND 64 − digital ground; note 1
41 I VCM control input voltage
42 I positive VCM sense amplifier input voltage
43 I negative VCM sense amplifier input voltage
44 O positive output voltage of the VCM power stage
46 I reference voltage input for the VCM
49 O reference voltage generator output
50 O VCM sense amplifier output voltage
54 − general supply voltage (+12 V)
55 − digital supply voltage (+5 V)
TDA5149G
Note
1. The 4 ground pins are tied to the lead frame for better heat dissipation.
1996 May 06 6

Philips Semiconductors Product specification
Fig.3 Pin configuration.
handbook, full pagewidth
TDA5149G
MGE654
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
PGND2
BRAKEPOWER
VCM
ref
H0
V
CM+
V
CMSENSEL
V
CMSENSEH
V
CMIN1
V
CMIN2
V
DDV
CLAMP
TEMPMON
V
CM−
RESETA
RESETP
AMPOUT
CAPY
MOT0
H1
MOT1
L1
H2
MOT2
L2
H3
MOT3
L3
IDRIVE
SPINSENSEH
SPINSENSEL
SISENS
AGDN
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
49
DGND
CAPX1
CAPX2
SENABLE
SCLOCK
SDATA
CLOCK
FG
SCANTEST
V
DDD
V
DD
LATCHACTIV
LATCHHOLD
BRAKEDELAY
V
CMSENSOUT
V
ref(o)
I
ref
SINTIN
ISPIN
SICOMP
RPOS
CSS1
CSS2
STOSC
SCANOUT
POR
DELAY
V
DDA1
POR5
ADJ
POR12
ADJ
AMPIN−
AMPIN+
PGND1
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
TDA5149G
1996 May 06 7

Philips Semiconductors Product specification
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
FUNCTIONAL DESCRIPTION
Spindle
The spindle section contains both the low and high side
pre-drivers for a three phase DC brushless motor.
The digital commutation control, using the timing
information provided via the serial port, is responsible for
the proper switch-on and switch-off of the external power
FETs. It is also responsible for selecting the correct BEMF
comparator.
For optimum power efficiency, a continuous PWM method
is used to control the average current from the power
supply to the motor coils. This PWM mode, by controlling
the average power supply current, produces a lower
torque ripple and thus lower audible noise. In order to
reduce further acoustic noise the TDA5149G is provided
with a soft switching circuit to turn-on and turn-off linearly
the switching current under PWM control. The switching
transition time is controlled by the digital commutation
circuit and is fixed to 50% of the time between two
zero-crossings, i.e. 30° of the electrical revolution.
Soft switching is achieved by activating, during
commutation, a free-running duty-cycle modulator
controlled by a linearly decreasing voltage across a
capacitor. This will reduce the current smoothly in the
off-going leg to zero. In conjunction with this additional
PWM open loop, the average current control regulates the
sum of the current in the off-going and on-going leg.
This method requires two PWM control loops; one to
control the average current (main loop) and one to control
the current in the off-going leg. The swapping of the two
loops is realized with a pair of analog switches that are
sequentially switched by the digital commutation circuitry.
The PWM control also causes PWM pulses on the back
EMF. These pulses disturb correct sensing of the back
EMF for the zero-crossing detection. Consequently,
edge-triggered latches are inserted behind the back EMF
comparators, thus ensuring reliable back EMF sensing.
In the SPINMODE, programmable via the serial bus, the
user can feed their own commutation pulses to the
pre-drivers and control the motor in the stepper-motor
mode. The commutation pulses are applied to the
TDA5149G via the serial bus by setting the COMMCLK bit
successively to logic 1 and logic 0.
TDA5149G
The different control modes of the TDA5149G can be
commanded via the serial bus. These modes are as
follows:
• Sleep mode: all analog circuits, except the power supply
monitor, are switched off to reduce the power
consumption of both the 12 and 5 V supplies.
• Disable mode: the output voltage of all pre-drivers is
LOW thus the external power MOSFETs are not
conducting.
• Brake mode: all low side pre-drivers are turned on
(output voltage HIGH) thus switching on the low-side
power MOSFETs. In this way the back EMF voltage of
the motor is short-circuited to ground.
Voice coil motor
The VCM is a linear, symmetrical, class AB, H-bridge type
power amplifier with all power devices on-chip. The driver
is a transconductance amplifier that controls the output
currents up to 1.65 A. The driver is constructed in a
master-slave configuration with the zero current level
internally adjusted in such a way that it corresponds to the
middle of the output swing. Moreover, the gain of the slave
has been made greater than 1 in order to ensure full
saturation of the driver output VCM+.
The gain of the closed loop is programmable, using the
V
GAINSEL
bus. A sense resistor (Rs) allows the measurement of the
VCM current. The voltage across this resistor is connected
to an accurate sense amplifier with a typical gain of 5.
The output of the sense amplifier (V
to the input of the VCM amplifier. Because of the symmetry
of the circuit, the compensation network can be connected
between the VCM1 input and the VCM− output.
Control modes such as VCM-BRAKE, VCM-DISABLE and
VCM-PARK can be controlled via the serial bus.
Latch drivers
The TDA5149G provides the possibility of driving an
external latch to secure the VCM heads. There are two
modes; the activate mode (LACTIVE) and the hold mode
(LHOLD). The hold mode is used to preserve power.
Both modes are controlled via the serial bus. The drivers
are switched off during the SLEEP mode or in the event of
a power-down.
bit. This bit can be programmed via the serial
CMSENSOUT
) is fed back
1996 May 06 8
Philips Semiconductors Product specification
12 V Voice Coil Motor (VCM) driver and
spindle motor pre-driver combination chip
Power-on/power-off reset
The power-on reset circuitry monitors the analog, digital
and general supplies. The voltage thresholds have been
set internally for both supplies, i.e. 4.4 V for V
V
, and 10.5 V for VDD. External adjustment and
DDD
filtering, to suppress supply spikes, has been made
possible through the pins POR5
and POR12
ADJ
When either of the supplies falls below their threshold
levels, the reset circuit provides two active LOW output
signals. The RESETA signal is a full CMOS output and the
RESETP signal has an active pull-down MOS transistor
with a passive pull-up resistance of 10 kΩ. The latter can
be used for emulation purposes. Both signals remain LOW
until the supply voltages are again above the threshold
level, delayed by a time constant period that is determined
by the value of the capacitor connected to pin POR
A park sequence is initiated on a reset fault. This includes
disabling the actuator latch drivers and starting a delayed
spindle brake operation by switching on the low side
pre-drivers simultaneously. This brake delay is determined
by an external RC combination connected to
BRAKEDELAY. Actuator PARK and spindle BRAKE can
also be controlled via the serial port.
At power-up, the two reset output signals (RESETA and
RESETP) will remain LOW as long as either supply
voltage is below the specified threshold plus the hysteresis
voltage. Once the supply voltages are above their specific
trip levels, the two reset signals become HIGH after the
power-on reset delay (POR
). This delay time is
DELAY
determined by the value of the capacitor connected to the
POR
DELAY
pin.
DDA
ADJ
and
.
DELAY
.
TDA5149G
To ensure that the stored energy in the clamp capacitor is
only used for the park operation, the CLAMP input must be
isolated from the power supply. This can be achieved by
using a Schottky diode or a reverse connected N-channel
power FET (see Fig.1). The TDA5149G provides an
output H0 to control this power FET.
At power-down the brake delay circuit is also enabled.
The brake delay circuit is supplied by the energy stored in
the capacitor (charged during normal operation from VDD)
that is connected to the BRAKEPOWER pin. Both the
BRAKEDELAY and BRAKEPOWER pins are then isolated
from the 12 V supply voltage. When the voltage on the
BRAKEDELAY pin reaches a value of 1.6 V (typ.), the
low-side external power FETs are turned on to brake the
spindle motor. The BRAKEPOWER capacitor then
supplies the current to keep the power FETs conducting.
This means that the voltage on this capacitor decreases
with time.
Serial port
The serial port is used to modify the various operational
modes of the TDA5149G and to adjust the timing
parameters to ensure the proper commutation sequence
of the spindle motor. It is a synchronous, slave only,
three-wire communication port with data (SDATA), clock
(SCLOCK) and enable (SENABLE) inputs.
The serial port requires the data to be sent in bytes, the
LSB (data 0) to be sent first and the MSB (address 2) last.
The three most significant bits (MSBs) determine the
register address, the remaining five bits represent the
data, which means up to 8 registers can be independently
addressed.
Powerless park/brake
As with the normal retract procedure, an actuator park
sequence is initiated whenever a power-down situation
occurs. The power-on/power-off reset circuit generates the
two active LOW reset signals and also activates the VCM
park circuit. The VCM park circuit provides a voltage,
retrieved from the rectified back EMF voltage of the
running-out spindle, of 1.2 V (typ.) to the VCM pin.
The voltage at pin VCM+ is 0 V. This voltage is supplied by
the capacitor C
that is connected to the CLAMP pin.
CLAMP
This capacitor smooths the rectified back EMF and stores
the electrical energy generated by the motor.
1996 May 06 9
When SENABLE is LOW, the serial port is disabled and
the IC is not affected by any change both on SDATA and
SCLOCK. When SENABLE is HIGH the data is written
serially to the shift register on the rising edge of SCLOCK.
When SENABLE goes LOW the shifting sequence is
stopped and the last 8 bits that are clocked in are latched
into the appropriate control register. Therefore, the
transmission of two consecutive bytes requires that
SENABLE is LOW for at least a duration of ‘t’
(see Chapter “Characteristics”).
 Loading...
Loading...