

Philips PDI1394P25BY Technical data

查询PDI1394P25BY供应商
INTEGRATED CIRCUITS
PDI1394P25BY
1-port 400 Mbps physical layer interface
Product data 2002 Oct 11
Philips Semiconductors Product data
PDI1394P25BY1-port 400 Mbps physical layer interface
1.0 FEATURES
•Fully supports provisions of IEEE 1394–1995 Standard for high
performance serial bus and the P1394a–2000 Standard
1
• Fully interoperable with Firewire and i.LINK implementations of
the IEEE 1394 Standard.
2
•Full P1394a support includes:
– Connection debounce
– Arbitrated short reset
– Multispeed concatenation
– Arbitration acceleration
– Fly-by concatenation
– Port disable/suspend/resume
•Provides one 1394a fully-compliant cable port at
100/200/400 Mbps. Can be used as a one port PHY without the
use of any extra external components
•Fully compliant with Open HCI requirements
•Power down features to conserve energy in battery-powered
applications include:
– Automatic device power down during suspend
– Device power down terminal
– Link interface disable via LPS
– Inactive ports powered-down
•Logic performs system initialization and arbitration functions
•Encode and decode functions included for data-strobe bit level
encoding
•Incoming data resynchronized to local clock
•Single 3.3 volt supply operation
•Minimum V
of 2.7 V for end-of-wire power-consuming devices
DD
•While unpowered and connected to the bus, will not drive TPBIAS
on a connected port, even if receiving incoming bias voltage on
that port
•Supports extended bias-handshake time for enhanced
interoperability with camcorders
•Interface to link-layer controller supports both low-cost bus-holder
isolation and optional Annex J electrical isolation
•Data interface to link-layer controller through 2/4/8 parallel lines at
49.152 MHz
•Low-cost 24.576 MHz crystal provides transmit, receive data at
100/200/400 Mbps, and link-layer controller clock at 49.152 MHz
•Does not require external filter capacitors for PLL
•Interoperable with link-layer controllers using 3.3 V and 5 V
supplies
•Interoperable with other Physical Layers (PHYs) using 3.3 V and
5 V supplies
•Node power class information signaling for system power
management
•Register bits give software control of contender bit, power class
bits, link active bit, and 1394a features
2.0 DESCRIPTION
The PDI1394P25BY provides the digital and analog transceiver
functions needed to implement a one port node in a cable-based
IEEE 1394–1995 and/or 1394a network. The transceivers include
circuitry to monitor the line conditions as needed for initialization and
arbitration, and for packet reception and transmission. The
PDI1394P25 is designed to interface with a Link Layer Controller
(LLC), such as the PDI1394L40 or PDI1394L41.
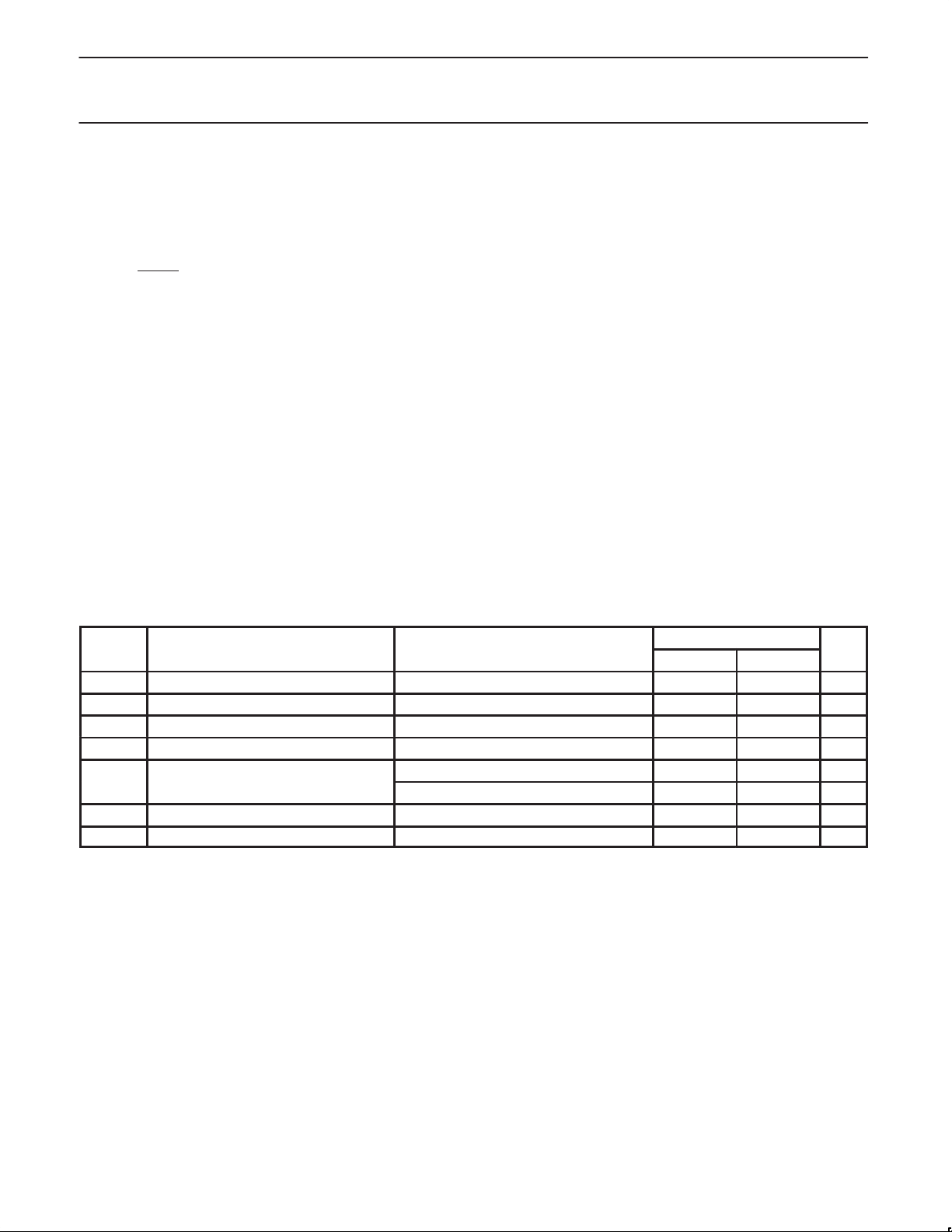
3.0 ORDERING INFORMATION
PACKAGE TEMPERATURE RANGE ORDER CODE PKG. DWG. #
48-pin plastic LQFP 0 °C to +70 °C PDI1394P25BY SOT313-2
1. Implements technology covered by one or more patents of Apple Computer, Incorporated and SGS Thompson, Limited.
2. Firewire is a trademark of Apple Computer Inc. i.LINK is a trademark of Sony.
2002 Oct 1 1
2
Philips Semiconductors Product data
PDI1394P25BY1-port 400 Mbps physical layer interface
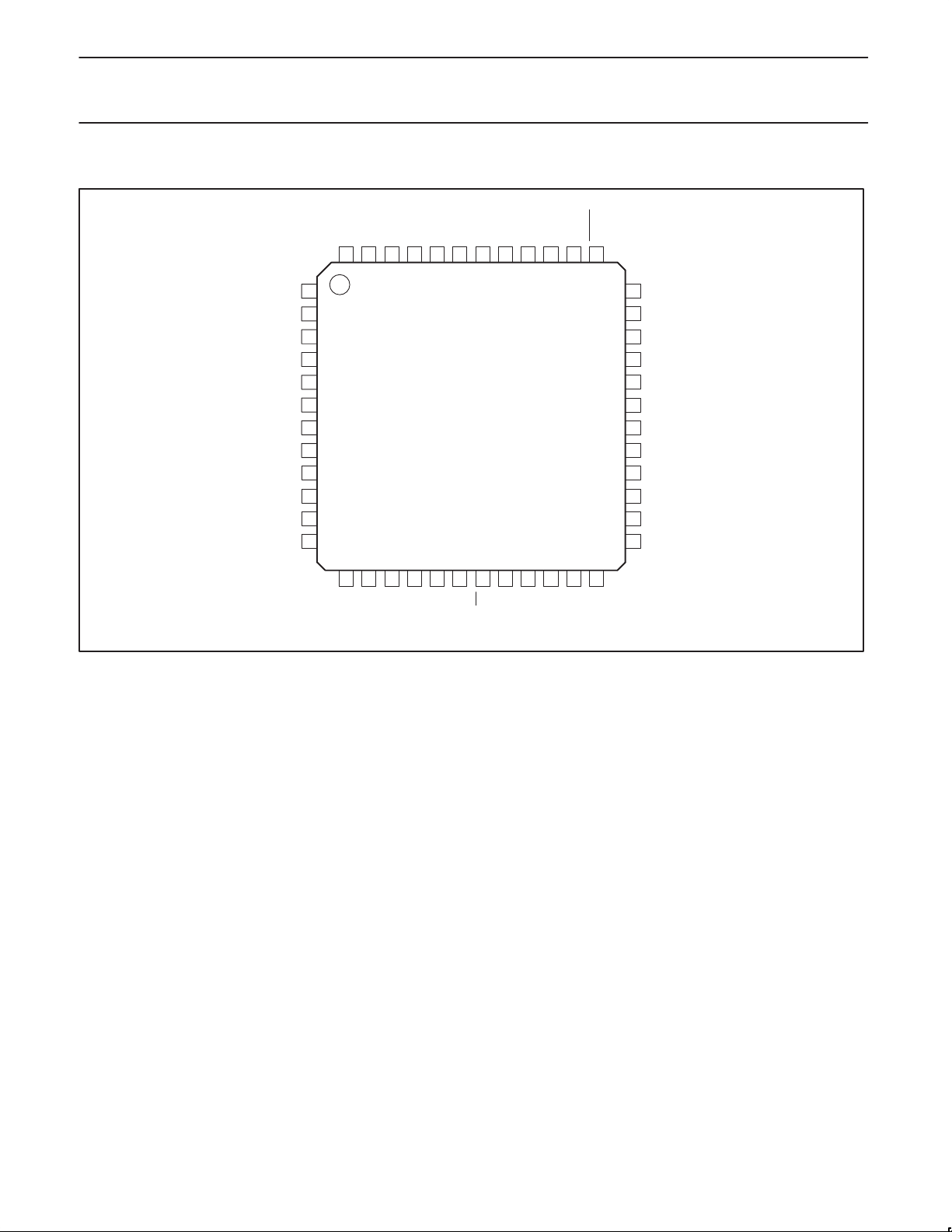
4.0 LQFP PIN CONFIGURA TION
SYSCLK
CTL0
CTL1
PD
DGND
46
15
C/LKON
DD
DV
45
16
PC0
XO
XI
DV
44
43
42
PDI1394P25BY
17
18
19
ISO
PC1
PC2
LREQ
DGND
48
47
1
2
3
D0
4
D1
5
D2
6
D3
7
D4
8
9
D5
10
D6
11
D7
12
13
14
LPS
DGND
DD
PLLGND
PLLV
41
40
20
21
CPS
DV
DD
N/C
N/C
RESET
39
38
37
36
AGND
AV
35
DD
34
R1
33
R0
32
AGND
31
TPBIAS
30
TPA0+
29
TPA0–
28
TPB0+
27
TPB0–
26
AGND
25
AV
DD
22
23
24
DD
N/C
TEST0
BRIDGE
SV01920
2002 Oct 1 1
3
Philips Semiconductors Product data
PDI1394P25BY1-port 400 Mbps physical layer interface
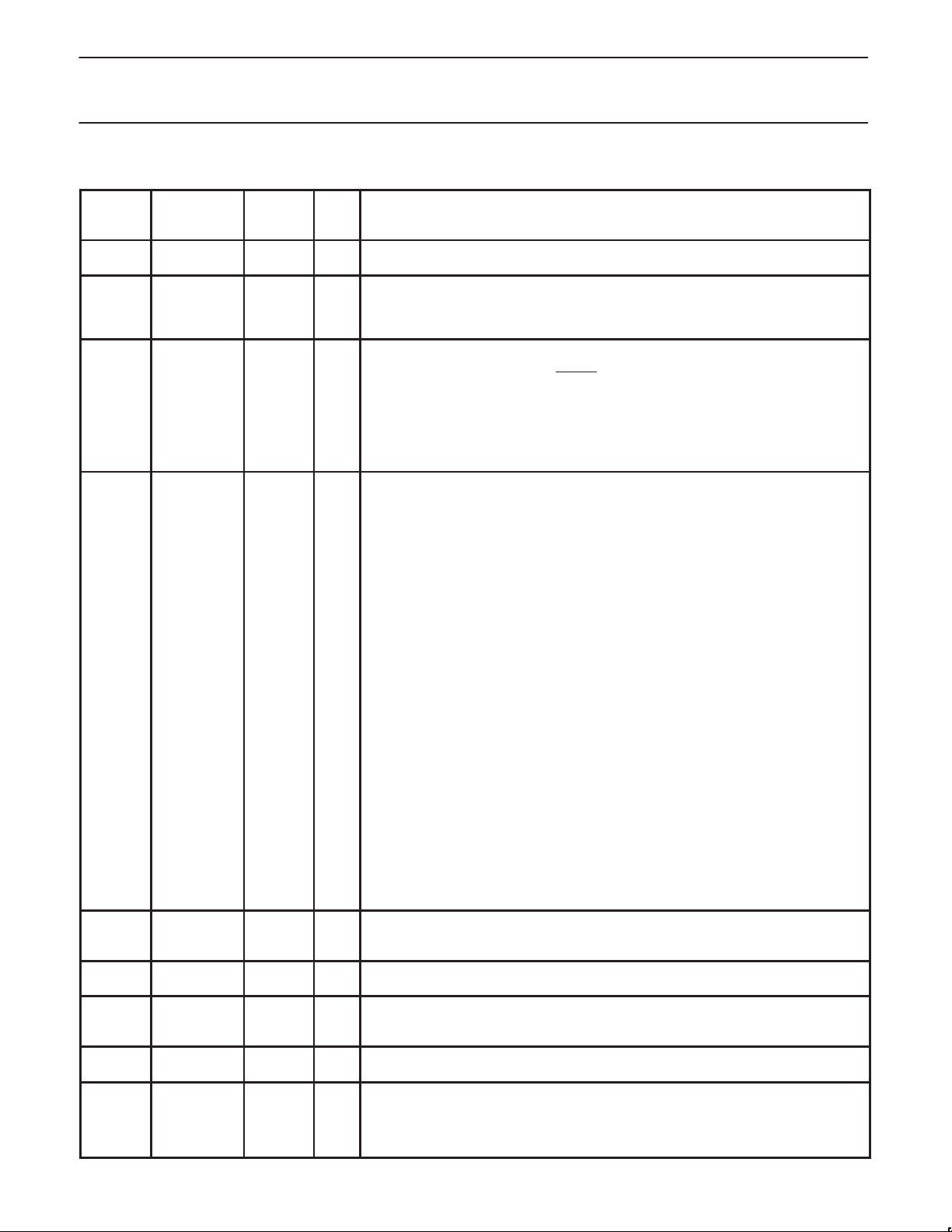
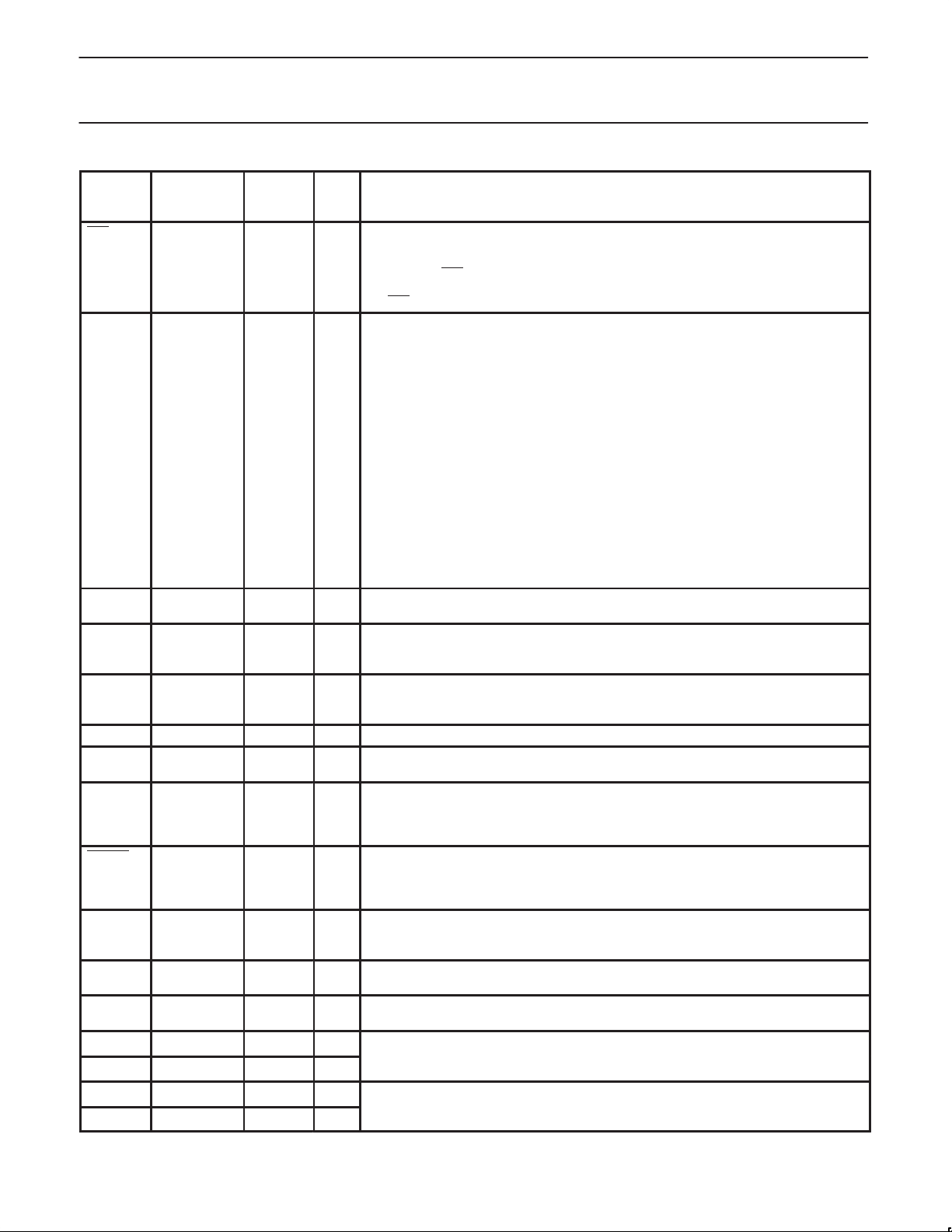
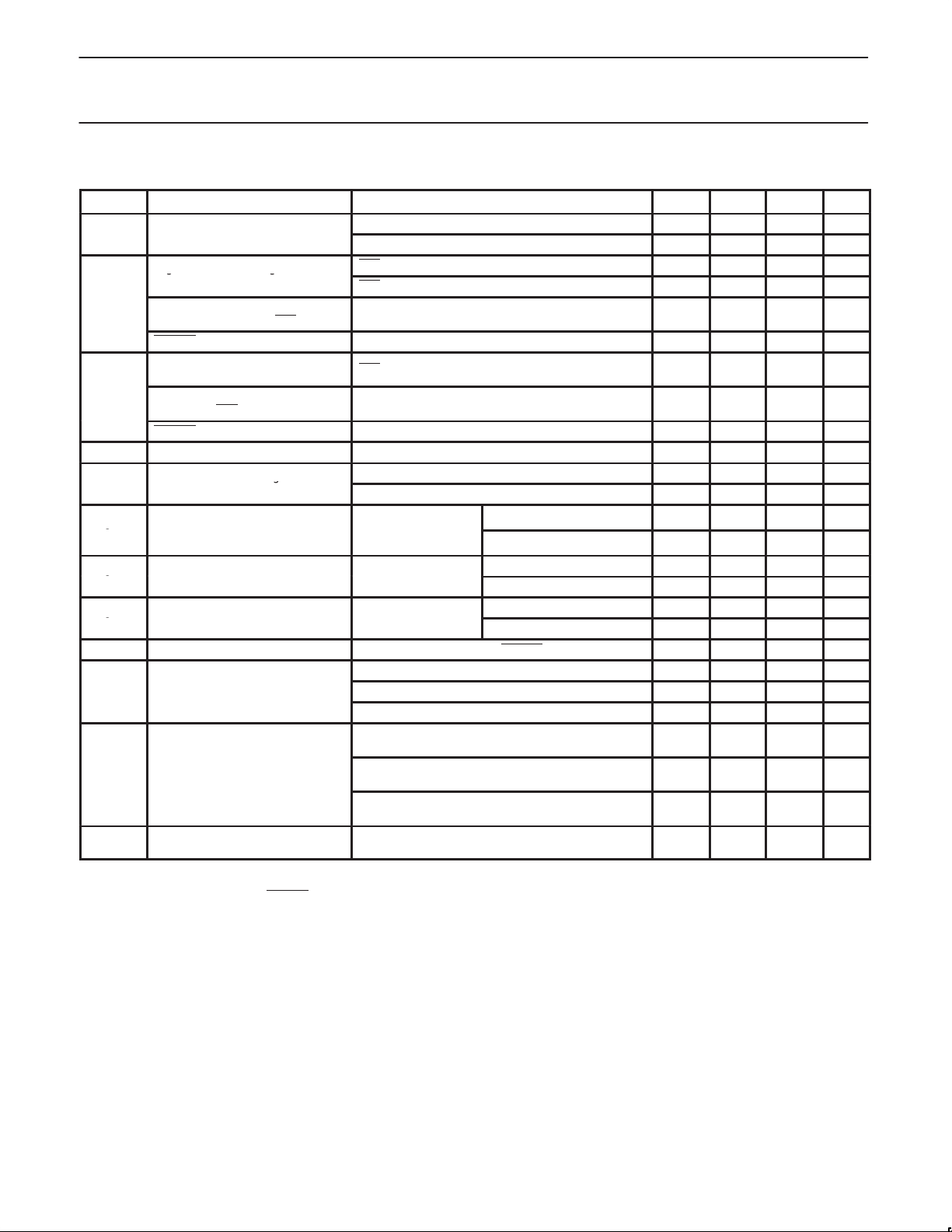
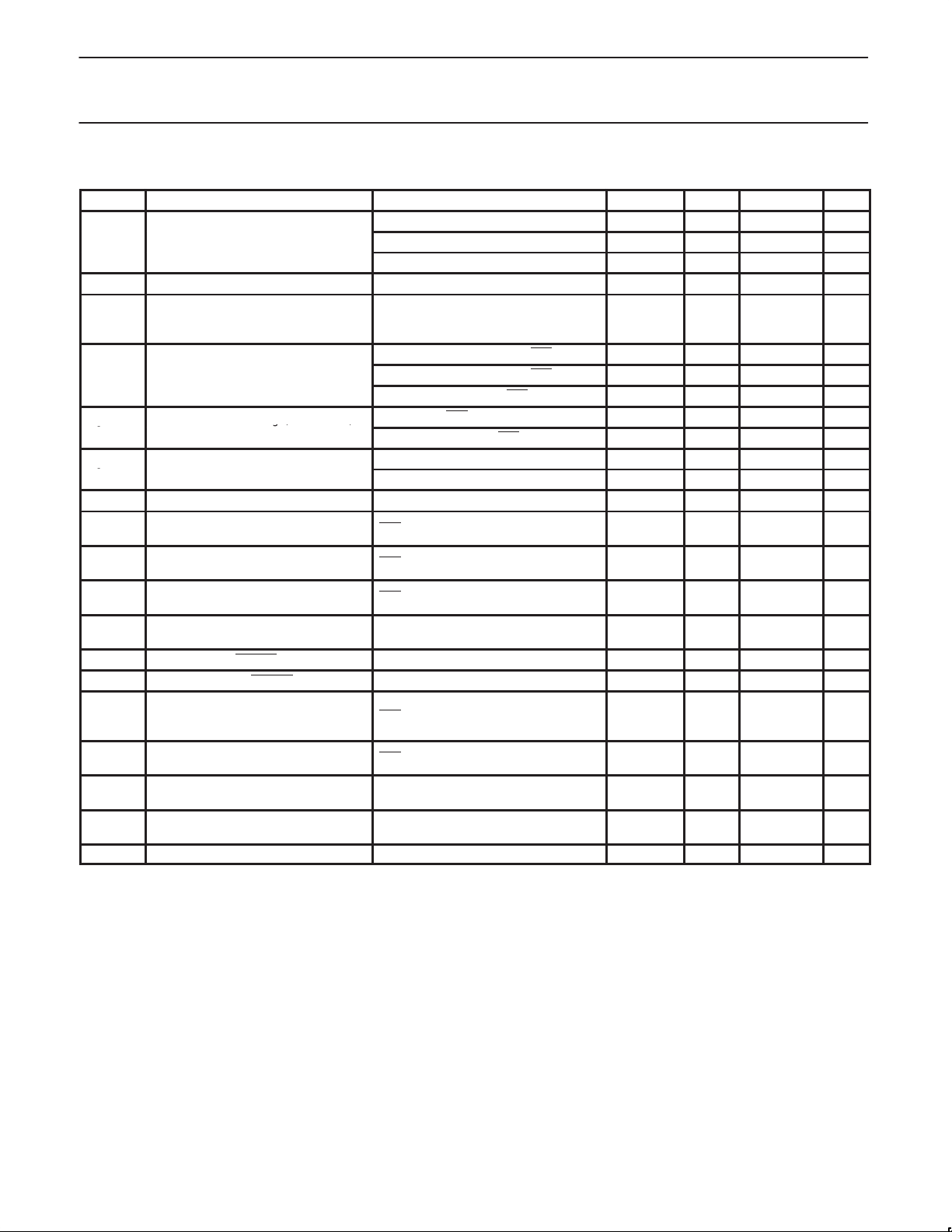
5.0 PIN DESCRIPTION
Name Pin Type LQFP
AGND Supply 26, 32,
AV
DD
BRIDGE CMOS 23 I BRIDGE input. This input is used to set the Bridge_Aware bits located in the
C/LKON CMOS 5 V tol 15 I/O Bus Manager Contender programming input and link-on output. On hardware reset, this
CPS CMOS 20 I Cable Power Status input. This terminal is normally connected to cable power through a
CTL0,
CTL1
D0–D7 CMOS 5 V tol 4, 5, 6, 7,
DGND Supply 14, 46,
DV
DD
Supply 25, 35 — Analog circuit power terminals. A combination of high frequency decoupling capacitors on
CMOS 5 V tol 2, 3 I/O Control I/Os. These bi-directional signals control communication between the PDI1394P25
Supply 21, 44,
Pin
Numbers
36
8, 9, 10,
11
47
45
I/O Description
— Analog circuit ground terminals. These terminals should be tied together to the low
impedance circuit board ground plane.
each side are suggested, such as paralleled 0.1 µF and 0.001 µF. These supply terminals
are separated from PLLV
They should be tied at a low impedance point on the circuit board.
Vendor-Dependent register Page 7, base address 1001b, bit positions 6 and 7. This pin is
sampled during a hardware reset (RESET low). When the BRIDGE pin is tied low (or
through a 1 kΩ resistor to accommodate other vendor’s pin-compatible chips), the
Bridge_Aware bits are set to “00” indicating a “non-bridge device.” When the BRIDGE pin
is tied high, the Bridge_Aware bits are set to “11” indicating a “1394.1 bridge compliant”
device. The default setting of the Bridge_Aware bits can be overridden by writing to the
register. The Bridge_A ware bits are reported in the self-ID packet at bit positions 18 and
19.
terminal is used to set the default value of the contender status indicated during self-ID.
Programming is done by tying the terminal through a 10-kΩ resistor to a high (contender)
or low (not contender). The resistor allows the link-on output to override the input.
If this pin is connected to a LLC driver pin for setting Bus Manager/IRM contender status,
then a 10-kΩ series resistor should be placed on this line between the PHY and the LLC
to prevent possible contention. In this case. the pull-high or pull-low resistors mentioned in
the previous paragraph should not be used. Refer to Figure 9.
Following hardware reset, this terminal is the link-on output, which is used to notify the
LLC to power-up and become active. The link-on output is a square-wave signal with a
period of approximately 163 ns (8 SYSCLK cycles) when active. The link-on output is
otherwise driven low, except during hardware reset when it is high impedance.
The link-on output is activated if the LLC is inactive (LPS inactive or the LCtrl bit cleared)
and when:
a) the PHY receives a link-on PHY packet addressed to this node,
b) the PEI (port-event interrupt) register bit is 1, or
c) any of the CTOI (configuration-timeout interrupt), CPSI (cable-power-status interrupt),
or STOI (state-timeout interrupt) register bits are 1 and the RPIE (resuming-port
interrupt enable) register bit is also 1.
Once activated, the link-on output will continue active until the LLC becomes active (both
LPS active and the LCtrl bit set). The PHY also de-asserts the link-on output when a
bus-reset occurs unless the link-on output would otherwise be active because one of the
interrupt bits is set (i.e., the link-on output is active due solely to the reception of a link-on
PHY packet).
NOTE: If an interrupt condition exists which would otherwise cause the link-on output to
be activated if the LLC were inactive, the link-on output will be activated when the LLC
subsequently becomes inactive.
390 kΩ resistor. This circuit drives an internal comparator that is used to detect the
presence of cable power.
and the LLC. Bus holders are built into these terminals.
I/O Data I/Os. These are bi-directional data signals between the PDI1394P25 and the LLC.
Bus holders are built into these terminals. Unused Dn pins should be pulled to ground
through 10 kΩ resistors.
— Digital circuit ground terminals. These terminals should be tied together to the low
impedance circuit board ground plane.
— Digital circuit power terminals. A combination of high frequency decoupling capacitors
near each side of the IC package are suggested, such as paralleled 0.1 µF and 0.001 µF.
Lower frequency 10 µF filtering capacitors are also recommended. These supply terminals
are separated from PLLVDD and AVDD internal to the device to provide noise isolation.
They should be tied at a low impedance point on the circuit board.
and DVDD internal to the device to provide noise isolation.
DD
2002 Oct 1 1
4
Philips Semiconductors Product data
and negative differential signal terminals should be ke t matched and as short as ossible
and negative differential signal terminals should be ke t matched and as short as ossible
PDI1394P25BY1-port 400 Mbps physical layer interface
Name DescriptionI/OLQFP
ISO CMOS 19 I Link interface isolation control input. This terminal controls the operation of output
LPS CMOS 5 V tol 13 I Link Power Status input. This terminal is used to monitor the active/power status of the
LREQ CMOS 5 V tol 48 I LLC Request input. The LLC uses this input to initiate a service request to the
NC No connect 22, 38,
PC0
PC1
PC2
PD CMOS 5 V tol 12 I Power Down input. A logic high on this terminal turns off all internal circuitry.
PLLGND Supply 41 — PLL circuit ground terminals. These terminals should be tied together to the low
PLLV
DD
RESET CMOS 5 V tol 37 I Logic reset input. Asserting this terminal low resets the internal logic. An internal pull-up
R0
R1
SYSCLK CMOS 1 O System clock output. Provides a 49.152 MHz clock signal, synchronized with data
TEST0 CMOS 24 I Test control input. This input is used in manufacturing tests of the PDI1394P25. For
TPA0+ Cable 30 I/O
TPA0– Cable 29 I/O
TPB0+ Cable 28 I/O
TPB0– Cable 27 I/O
Pin Type
CMOS 5 V tol 16
Supply 40 — PLL circuit power terminals. A combination of high frequency decoupling capacitors near
Bias 33
Pin
Numbers
39
17
18
34
differentiation logic on the CTL and D terminals. If an optional isolation barrier of the type
described in Annex J of IEEE Std 1394–1995 is implemented between the PDI1394P25
and LLC, the ISO
isolation barrier is implemented (direct connection), or bus holder isolation is implemented,
the ISO
terminal should be tied high to disable the differentiation logic.
link layer controller and to control the state of the PHY -LLC interface. This terminal should
be connected to either the V
output which is active when the LLC is powered. A pulsed signal should be used when an
isolation barrier exists between the LLC and PHY. (See Figure 8)
The LPS input is considered inactive if it is sampled low by the PHY for more than 2.6 µs
(128 SYSCLK cycles), and is considered active otherwise (i.e., asserted steady high or an
oscillating signal with a low time less than 2.6 µs). The LPS input must be high for at least
21 ns in order to be guaranteed to be observed as high by the PHY.
When the PDI1394P25 detects that LPS is inactive, it will place the PHY -LLC interface
into a low-power reset state. In the reset state, the CTL and D outputs are held in the logic
zero state and the LREQ input is ignored; however, the SYSCLK output remains active. If
the LPS input remains low for more than 26 µs (1280 SYSCLK cycles), the PHY-LLC
interface is put into a low-power disabled state in which the SYSCLK output is also held
inactive. The PHY -LLC interface is placed into the disabled state upon hardware reset.
The LLC is considered active only if both the LPS input is active and the LCtrl register bit
is set to 1, and is considered inactive if either the LPS input is inactive or the LCtrl register
bit is cleared to 0.
PDI1394P25. Bus holder is built into this terminal.
— These pins are not internally connected and consequently are “don’t cares”. Other
vendors’ pin compatible chips may require connections and external circuitry on
these pins.
I Power Class programming inputs. On hardware reset, these inputs set the default value of
the power class indicated during self-ID. Programming is done by tying the terminals high
or low. Refer to Table 21 for encoding.
impedance circuit board ground plane.
each terminal are suggested, such as paralleled 0.1 µF and 0.001 µF. These supply
terminals are separated from DVDD and AVDD internal to the device to provide noise
isolation. They should be tied at a low impedance point on the circuit board.
resistor to VDD is provided so only an external delay capacitor is required for proper
power-up operation. For more information, refer to Section 17.2. This input is otherwise a
standard Schmitt logic input, and can also be driven by an open-drain type driver.
— Current setting resistor pins These pins are connected to an external resistance to set the
internal operating currents and cable driver output currents. A resistance of 6.34 kΩ ±1%
is required to meet the IEEE 1394–1995 Std. output voltage limits.
transfers, to the LLC.
normal use, this terminal should be tied to GND.
Twisted-pair cable A differential signal terminals. Board traces from each pair of positive
to the external load resistors and to the cable connector.
Twisted-pair cable B differential signal terminals. Board traces from each pair of positive
to the external load resistors and to the cable connector.
terminal should be tied low to enable the differentiation logic. If no
supplying the LLC through a 10 kΩ resistor, or to a pulsed
DD
p
p
p
p
2002 Oct 1 1
5
Philips Semiconductors Product data
PDI1394P25BY1-port 400 Mbps physical layer interface
Name DescriptionI/OLQFP
Pin Type
Pin
Numbers
TPBIAS0 Cable 31 I/O Twisted-pair bias output. This provides the 1.86 V nominal bias voltage needed for proper
operation of the twisted-pair cable drivers and receivers, and for signaling to the remote
nodes that there is an active cable connection. These terminals must be decoupled with a
0.3 µF–1 µF capacitor to ground.
XI
XO
Crystal 42
43
— Crystal oscillator inputs. These terminals connect to a 24.576 MHz parallel resonant
fundamental mode crystal. The optimum values for the external shunt capacitors are
dependent on the specifications of the crystal used. Can also be driven by an external
clock generator (leave XO unconnected in this case and start supplying the external clock
before resetting the PDI1394P25). For more information, refer to Section 17.5
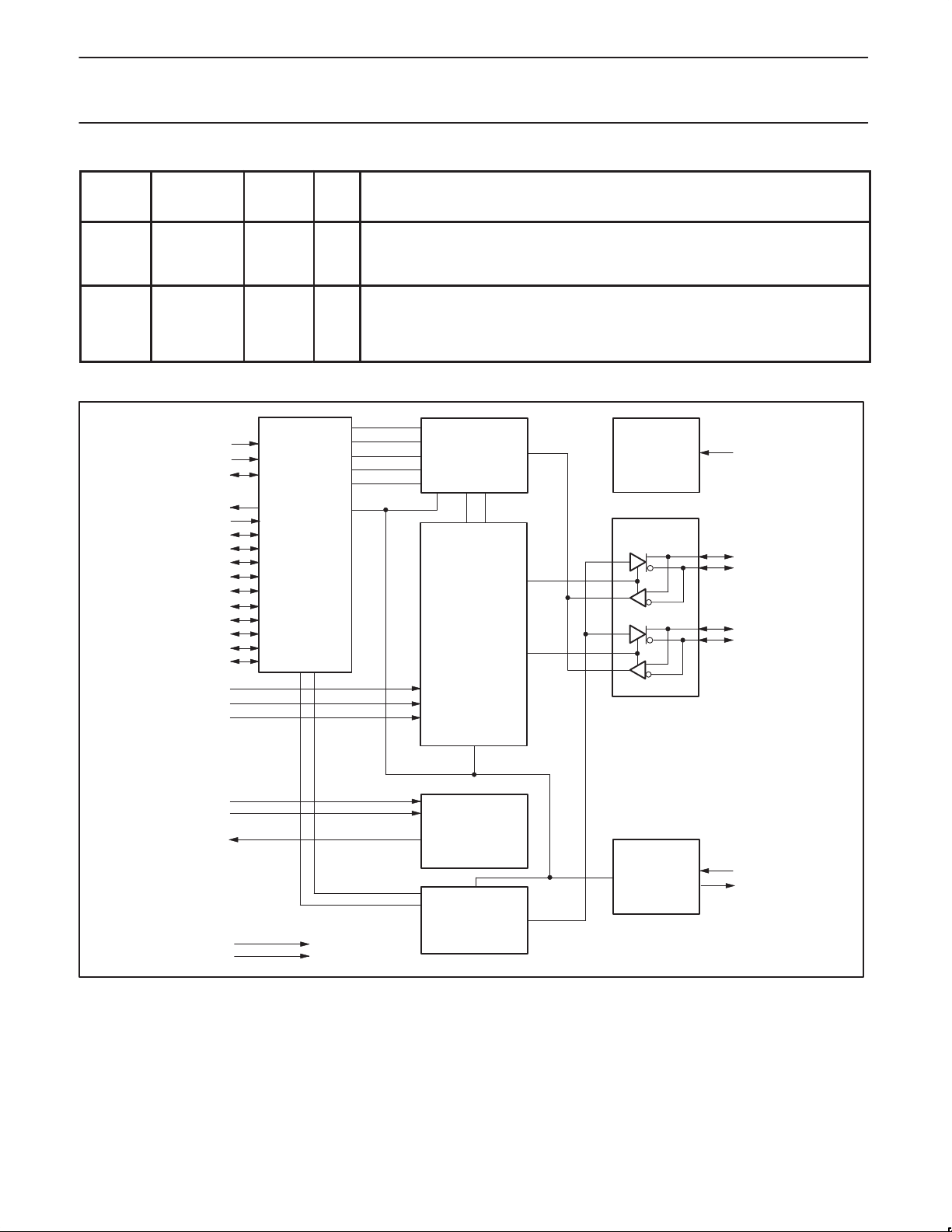
6.0 BLOCK DIAGRAM
LPS
/ISO
C/LKON
SYSCLK
LREQ
CTL0
CTL1
LINK
INTERFACE
D0
D1
D2
D3
D4
D5
D6
D7
I/O
RECEIVED DATA
DECODER/
RETIMER
ARBITRATION
AND CONTROL
STATE MACHINE
LOGIC
CABLE POWER
DETECTOR
CABLE PORT 0
CPS
TPA0+
TPA0–
TPB0+
TPB0–
PC0
PC1
PC2
TPBIAS0
/RESET
R0
R1
PD
BIAS VOLTAGE
AND
CURRENT
GENERATOR
TRANSMIT
DATA
ENCODER
CRYSTAL
OSCILLATOR,
PLL SYSTEM,
AND CLOCK
GENERATOR
XI
XO
SV01921
2002 Oct 1 1
6

Philips Semiconductors Product data
PDI1394P25BY1-port 400 Mbps physical layer interface
7.0 FUNCTIONAL SPECIFICA TION
The PDI1394P25 requires only an external 24.576 MHz crystal as a
reference. An external clock can be connected to XI instead of a
crystal. An internal oscillator drives an internal phase-locked loop
(PLL), which generates the required 393.216 MHz reference signal.
This reference signal is internally divided to provide the clock signals
used to control transmission of the outbound encoded Strobe and
Data information. A 49.152 MHz clock signal, supplied to the
associated LLC for synchronization of the two chips, is used for
resynchronization of the received data. The Power Down (PD)
function, when enabled by asserting the PD terminal high, stops
operation of the PLL and disables all circuits except the cable bias
detectors at the TPB terminals. The port transmitter circuitry and the
receiver circuitry are also disabled when the port is disabled,
suspended, or disconnected.
The PDI1394P25 supports an optional isolation barrier between
itself and its LLC. When the ISO
LLC interface outputs behave normally. When the ISO
tied low, internal differentiating logic is enabled, and the outputs are
driven such that they can be coupled through a capacitive or
transformer galvanic isolation barrier as described in
section 5.9.4
the ISO
using single capacitor isolation, please refer to the Philips Isolation
Application Note AN2452.
Data bits to be transmitted through the cable ports are received from
the LLC on two, four or eight parallel paths (depending on the
requested transmission speed). They are latched internally in the
PDI1394P25 in synchronization with the 49.152 MHz system clock.
These bits are combined serially, encoded, and transmitted at
98.304/196.608/393.216 Mbps (referred to as S100, S200, and
S400 speed, respectively) as the outbound data-strobe information
stream. During transmission, the encoded data information is
transmitted differentially on the TPB cable pair(s), and the encoded
strobe information is transmitted differentially on the TP A cable
pair(s).
During packet reception the TPA and TPB transmitters of the
receiving cable port are disabled, and the receivers for that port are
enabled. The encoded data information is received on the TPA cable
pair, and the encoded strobe information is received on the TPB
cable pair. The received data-strobe information is decoded to
recover the receive clock signal and the serial data bits. The serial
data bits are split into two-, four- or eight-bit parallel streams
(depending upon the indicated receive speed), resynchronized to
the local 49.152 MHz system clock and sent to the associated LLC.
Both the TPA and TPB cable interfaces incorporate dif ferential
comparators to monitor the line states during initialization and
arbitration. The outputs of these comparators are used by the
internal logic to determine the arbitration status. The TPA channel
monitors the incoming cable common-mode voltage. The value of
this common-mode voltage is used during arbitration to set the
speed of the next packet transmission (speed signaling). In addition,
the TPB channel monitors the incoming cable common-mode
voltage on the TPB pair for the presence of the remotely supplied
twisted-pair bias voltage (cable bias detection).
The PDI1394P25 provides a 1.86 V nominal bias voltage at the
TPBIAS terminal for port termination. The PHY contains two
independent TPBIAS circuits. This bias voltage, when seen through
a cable by a remote receiver, indicates the presence of an active
. To operate with single capacitor (bus holder) isolation,
on the PHY terminal must be tied high. For more details on
input terminal is tied high, the
terminal is
IEEE 1394a
connection. This bias voltage source must be stabilized by an
external filter capacitor of 0.3 µF–1 µF.
The line drivers in the PDI1394P25 operate in a high-impedance
current mode, and are designed to work with external 112 Ω
line-termination resistor networks in order to match the 110 Ω cable
impedance. One network is provided at each end of all twisted-pair
cable connections. Each network is composed of a pair of
series-connected 56 Ω resistors. The midpoint of the pair of resistors
that is directly connected to the twisted-pair A terminals is connected
to its corresponding TPBIAS voltage terminal. The midpoint of the pair
of resistors that is directly connected to the twisted-pair B terminals is
coupled to ground through a parallel R-C network with recommended
values of 5 kΩ and 220 pF. The values of the external line termination
resistors are designed to meet the standard specifications when
connected in parallel with the internal receiver circuits. An external
resistor connected between the R0 and R1 terminals sets the driver
output current, along with other internal operating currents. This
current setting resistor has a value of 6.34 kΩ ±1%.
When the power supply of the PDI1394P25 is removed while the
twisted-pair cables are connected, the PDI1394P25 transmitter and
receiver circuitry presents a high impedance to the cable in order to
not load the TPBIAS voltage on the other end of the cable.
The TEST0 terminal is used to set up various manufacturing test
conditions. For normal operation, it should be connected to ground.
The BRIDGE terminal is used to set the default value of the
Bridge_Aware bits i the Page 7 (Vendor Dependent) register. Tying
BRIDGE low directly (or through a 1 kΩ resistor to accommodate
other vendors’ pin-compatible chips), defaults the Bridge_Aware
field to “00” indicating a “non-bridge device.” Tying BRIDGE high,
defaults the Bridge_Aware bit to “11” indicating a “1394.1 bridge
compliant” device. Writing to the Bridge_Aware field overrides the
default setting from the BRIDGE terminal. The Bridge_Aware field is
reported in the self-ID packet at bit positions 18 and 19.
Four package terminals, used as inputs to set the default value for
four configuration status bits in the self-ID packet, should be
hard-wired high or low as a function of the equipment design. The
PC0–PC2 terminals are used to indicate the default power-class
status for the node (the need for power from the cable or the ability
to supply power to the cable). See Table 21 for power class
encoding. The C/LKON terminal is used as an input to indicate that
the node is a contender for bus manager.
The PHY supports suspend/resume as defined in the IEEE 1394a
specification. The suspend mechanism allows pairs of directly
connected ports to be placed into a low power state while
maintaining a port-to-port connection between 1394 bus segments.
While in a low power state, a port is unable to transmit or receive
data transaction packets. However, a port in a low power state is
capable of detecting connection status changes and detecting
incoming TPBIAS. When the PDI1394P25’s port is suspended, all
circuits except the bias-detection circuits are powered down,
resulting in significant power savings. The TPBIAS circuit monitors
the value of incoming TPA pair common-mode voltage when local
TPBIAS is inactive. Because this circuit has an internal current
source and the connected node has a current sink, the monitored
value indicates the cable connection status. This monitor is called
connect-detect.
2002 Oct 1 1
7
Philips Semiconductors Product data
SYMBOL
PARAMETER
CONDITION
UNIT
Electrostatic discharge
PDI1394P25BY1-port 400 Mbps physical layer interface
TPBIAS connect-detect monitor IO used in suspend/resume
signaling and cable connection detection. For additional details of
suspend/resume operation, refer to the 1394a specification. The use
of suspend/resume is recommended for new designs.
The port transmitter and receiver circuitry is disabled during power
down (when the PD input terminal is asserted high), during reset
(when the RESET
cable is connected to the port, or when controlled by the internal
arbitration logic. The port twisted-pair bias voltage circuitry is
disabled during power down, during reset, or when the port is
disabled as commanded by the LLC.
The LPS (link power status) terminal works with the C/LKON
terminal to manage the power usage in the node. The LPS signal
from the LLC is used in conjunction with the LCtrl bit (see Table 1
and Table 2) to indicate the active/power status of the LLC. The LPS
signal is also used to reset, disable, and initialize the PHY -LLC
interface (the state of the PHY -LCC interface is controlled solely by
the LPS input regardless of the state of the LCtrl bit).
The LPS input is considered inactive if it remains low for more than
2.6 µs and is considered active otherwise. When the PDI1394P25
detects that LPS is inactive, it will place the PHY -LLC interface into a
low-power reset state in which the CTL and D outputs are held in the
8.0 ABSOLUTE MAXIMUM RATINGS
In accordance with the Absolute Maximum Rating System (IEC 134). Voltages are referenced to GND (ground = 0 V).
V
DD
V
I
VI–5 V 5 volt tolerant input voltage range –0.5 5.5 V
V
O
T
amb
T
stg
NOTE:
1. Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings
only, and functional operation of the device at these or any other conditions beyond those indicated under “Recommended Operating
Conditions” is not implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability .
input terminal is asserted low), when no active
1
DC supply voltage –0.5 4.0 V
DC input voltage –0.5 VDD+0.5 V
DC output voltage range at any output –0.5 VDD+0.5 V
Operating free-air temperature range 0 +70 °C
Storage temperature range –65 +150 °C
logic zero state and the LREQ input is ignored; however, the
SYSCLK output remains active. If the LPS input remains low for
more than 26 µs, the PHY-LLC interface is put into a low-power
disabled state in which the SYSCLK output is also held inactive. The
PHY -LLC interface is also held in the disabled state during hardware
reset. The PDI1394P25 will continue the necessary repeater
functions required for normal network operation regardless of the
state of the PHY -LLC interface. When the interface is in the reset or
disabled state and LPS is again observed active, the PHY will
initialize the interface and return it to normal operation.
The PHY uses the C/LKON terminal to notify the LLC to power up
and become active. When activated, the C/LKON signal is a square
wave of approximately 163 ns period. The PHY activates the
C/LKON output when the LLC is inactive and a wake-up event
occurs. The LLC is considered inactive when either the LPS input is
inactive, as described above, or the LCtrI bit is cleared to 0. A
wake-up event occurs when a link-on PHY packet addressed to this
node is received, or conditionally when a PHY interrupt occurs. The
PHY de-asserts the C/LKON output when the LLC becomes active
(both LPS active and the LCtrl bit set to 1). The PHY also de-asserts
the C/LKON output when a bus-reset occurs unless a PHY interrupt
condition exists which would otherwise cause C/LKON to be active.
LIMITS
MIN MAX
Human Body Model — 2 kV
Machine Model — 200 V
2002 Oct 1 1
8
Philips Semiconductors Product data
SYMBOL
PARAMETER
CONDITION
MIN
TYP
MAX
UNIT
VDDSuppl
oltage
gg,,
V
g
V
TPB common-mode input voltage
or S100 s eed
V
TPB common-mode input voltage
S200 speed signal
V
TPB common-mode input voltage
S400 speed signal
PDI1394P25BY1-port 400 Mbps physical layer interface
9.0 RECOMMENDED OPERATING CONDITIONS
pp
y v
High-level input voltage, LREQ,
CTL0, CTL1, D0-D7
V
IH
High-level input voltage,
Source power node 3.0 3.3 3.6 V
Non-source power node 2.7
ISO = VDD, VDD >= 2.7 V 2.3 — — V
ISO = VDD, VDD >= 3.0 V 2.6 — — V
C/LKON2, PC0–PC2, ISO, PD
RESET 0.6 V
Low-level input voltage, LREQ,
CTL0, CTL1, D0–D7
V
Low-level input voltage, C/LKON2,
IL
PC0–PC2, ISO, PD,
ISO = V
DD
RESET — — 0.3 V
I
IC-100
IC-200
IC-400
t
PU
Output current TPBIAS outputs –6 — 2.5 mA
O
Differential input voltage
ID
amplitude
p
p
p
TPA, TPB cable inputs, during data reception 118 — 260 mV
TPA, TPB cable inputs, during data arbitration 168 — 265 mV
Speed signaling off
p
signal
p
p
Source power node 1.165 — 2.515 V
Non-source power node 1.165 — 2.015
Source power node 0.935 — 2.515 V
Non-source power node 0.935 — 2.015
Source power node 0.523 — 2.515 V
Non-source power node 0.523 — 2.015
Power-up reset time Set by capacitor between RESET pin and GND 2 — — ms
TPA, TPB cable inputs, S100 operation — — 1.08 ns
Receive input jitter
TPA, TPB cable inputs, S200 operation — — 0.5 ns
TPA, TPB cable inputs, S400 operation — — 0.315 ns
Between TPA and TPB cable inputs, S100
operation
Receive input skew
Between TPA and TPB cable inputs, S200
operation
Between TPA and TPB cable inputs, S400
operation
f
XTAL
Crystal or external clock
frequency
Crystal connected according to Figure 10 or
external clock input at pin XI
NOTES:
1. For a node that does not source power to the bus (see Section 4.2.2.2 in the IEEE 1394-1995 standard).
2. C/LKON is only an input when RESET
= 0.
1
3.0 3.6 V
0.7 V
— — V
DD
— —
DD
— — 0.7 V
— — 0.2 V
DD
DD
V
—
1
V
1
V
1
V
— — 0.8 ns
— — 0.55 ns
— — 0.5 ns
24.5735 24.576 24.5785 MHz
2002 Oct 1 1
9

Philips Semiconductors Product data
SYMBOL
PARAMETER
TEST CONDITION
UNIT
I
gg ,
SYMBOL
PARAMETER
TEST CONDITION
UNIT
ZIDDifferential input impedance
Drivers disabled
ZICCommon mode input impedance
Drivers disabled
PDI1394P25BY1-port 400 Mbps physical layer interface
10.0 CABLE DRIVER
LIMITS
MIN TYP MAX
V
I
O(diff)
SP
V
OFF
NOTES:
1. Limits defined as algebraic sum of TPA0+ and TPA0– driver currents. Limits also apply to TPB0+ and TPB0– algebraic sum of dri ver
currents.
2. Limits defined as one half of the algebraic sum of currents flowing out of TPB0+ and TPB0–.
11.0 CABLE RECEIVER
V
V
TH-CB
V
V
V
TH–SP200
V
TH–SP400
Differential output voltage 56 Ω load 172 — 265 mV
OD
Driver Difference current,
TPA0+, TPA0–, TPB0+, TPB0–
Common mode speed signaling output current,
TPB0+, TPB0–
2
1
Drivers enabled,
speed signaling OFF
–0.88 — 0.88 mA
200 Mbps speed signaling enabled –4.84 — –2.53 mA
400 Mbps speed signaling enabled –12.4 — –8.10 mA
OFF state differential voltage Drivers disabled — — 20 mV
LIMITS
MIN TYP MAX
10 14 —
— — 4 pF
20 — — kΩ
— — 24 pF
49 — 131 mV
314 — 396 mV
TH-R
TH+
TH–
I
CD
p
p
p
p
Receiver input threshold voltage Drivers disabled –30 — 30 mV
Cable bias detect threshold, TPB0n cable
inputs
Positive arbitration comparator input threshold
voltage
Negative arbitration comparator input threshold
voltage
Speed signal input threshold
Speed signal input threshold
Drivers disabled 0.6 — 1.0 V
Drivers disabled 89 — 168 mV
Drivers disabled –168 — –89 mV
TPBIAS–TPA0 common mode voltage,
drivers disabled 200 Mbps
TPBIAS–TPA0 common mode voltage,
drivers disabled 400 Mbps
Connect detect output at TPBIAS pins Drivers disabled — — –76 µA
kΩ
2002 Oct 1 1
10
Philips Semiconductors Product data
CTL1, D0 D7, SYSCLK
V
g, ,
VOHHigh-level output voltage, pin C/LKON
PDI1394P25BY1-port 400 Mbps physical layer interface
12.0 OTHER DEVICE I/O
SYMBOL PARAMETER TEST CONDITION MIN TYP MAX UNIT
See Note 1 — 56 — mA
I
DD
I
DD–PD
V
TH
V
OH
OL
V
OL
I
BH+
I
BH–
I
I
I
OZ
I
RST-UP
I
RST-DN
Supply current
Supply current in power down mode PD = VDD in power down mode — 150 — µA
Cable power status threshold voltage
High-level output voltage, pins CTL0,
–
Low-level output voltage, pins CTL0,
CTL1, D0–D7, SYSCLK
p
p
Low-level output voltage, pin C/LKON VDD = 2.7 V, IOL = 4 mA; See Note 4 — — 0.3 V
Positive peak bus holder current, pins
CTL0, CTL1, D0–D7, LREQ
Negative peak bus holder current, pins
CTL0, CTL1, D0–D7, LREQ
Input current, pins LREQ, LPS, PD,
TEST0, BRIDGE, PC0–PC2
Off-state current, pins CTL0, CTL1,
D0–D7, C/LKON
Pullup current, RESET input VI = 1.5 V or 0 V –90 — –20 µA
Pulldown current, RESET input VI = VDD, PD = V
Positive going threshold voltage,
V
V
V
V
V
IT+
IT–
LIT+
LIT–
O
LREQ, CTL0, CTL1, D0–D7, C/LKON
inputs
Negative going threshold voltage, LREQ,
CTL0, CTL1, D0–D7, C/LKON inputs
Positive going threshold voltage, LPS
inputs
Negative going threshold voltage, LPS
inputs
TPBIAS output voltage At rated IO current 1.665 — 2.015 V
NOTES:
1. Transmit Max Packet (1 port transmitting max size isochronous packet (4096 bytes), sent on every isochronous interval, S400, data value of
0xCCCCCCCCh), V
2. Receive typical packet (1 port receiving DV packets on every isochronous interval, S100), V
= 3.3 V, T
DD
3. Idle (1 Port transmitting cycle starts) V
4. The C/LKON pin is able to drive an isolation circuit according to Figure 5A-20 of the IEEE-1394a-2000 standard.
amb
= 25 °C
= 3.3 V, T
DD
See Note 2 — 40 — mA
See Note 3 — 38 — mA
390 kΩ resistor between cable power
and CPS pin: Measured at cable power
4.7 — 7.5 V
side of resistor
VDD >= 2.7 V , IOH = –4 mA, ISO = V
VDD >= 3.0 V , IOH = –4 mA, ISO = V
DD
DD
2.4 — — V
2.8 — — V
Annex J: IOH = –9 mA, ISO = 0 VDD–0.4 — — V
IOL = 4 mA, ISO = V
DD
— — 0.4 V
Annex J: IOL = 9 mA, ISO = 0 — — 0.4 V
VDD = 2.7 V, IOH = –4 mA ; See Note 4 2.4 — — V
VDD >= 3.0 V , IOH = –4 mA ; See Note 4 2.7 — — V
ISO = VDD, VI = 0 V to V
ISO = VDD, VI = 0 V to V
DD
DD
0.05 — 1.0 mA
–1.0 — –0.05 mA
ISO = 0 V; VDD = 3.6 V — — 5 µA
VO = VDD or 0 V –5 — 5 µA
DD
.4 1.6 2.8 mA
ISO = 0 V VDD/2 + 0.3 — VDD/2 + 0.9 V
ISO = 0 V VDD/2 – 0.9 — VDD/2 – 0.3 V
V
V
amb
= 0.42 × V
LREF
= 0.42 × V
LREF
= 25 °C
DD
DD
— — V
V
+0.2 — — V
LREF
= 3.3 V, T
DD
amb
= 25 °C
LREF
+1 V
2002 Oct 1 1
11
Philips Semiconductors Product data
SYMBOL
PARAMETER
TEST CONDITION
UNIT
PDI1394P25BY1-port 400 Mbps physical layer interface
13.0 THERMAL CHARACTERISTICS
LIMITS
MIN TYP MAX
RΘjA Junction-to-free-air thermal resistance Board mounted, no air flow — 68 — °C/W
14.0 AC CHARACTERISTICS
SYMBOL PARAMETER CONDITION MIN TYP MAX UNIT
Transmit jitter TPA, TPB — — 0.15 ns
Transmit skew Between TPA and TPB — — 0.10 ns
t
TPA, TPB differential output voltage rise time 10% to 90%; At 1394 connector 0.5 — 1.2 ns
r
t
TPA, TPB differential output voltage fall time 90% to 10%; At 1394 connector 0.5 — 1.2 ns
f
t
SU
t
t
C
C
Set-up time, CTL0, CTL1, D0–D7, LREQ to SYSCLK 50% to 50%; See Figure 2 5 — — ns
Hold time, CTL0, CTL1, D0–D7, LREQ after SYSCLK 50% to 50%; See Figure 2 0 — — ns
H
Delay time SYSCLK to CTL0, CTL1, D0–D7 50% to 50%; See Figure 3 0.5 — 11 ns
D
Capacitance load value CTL0, CTL1, D0–D7,
L
SYSCLK
Input capacitance CTL0, CTL1, D0–D7, LREQ — 3.3 — pF
i
— 10 — pF
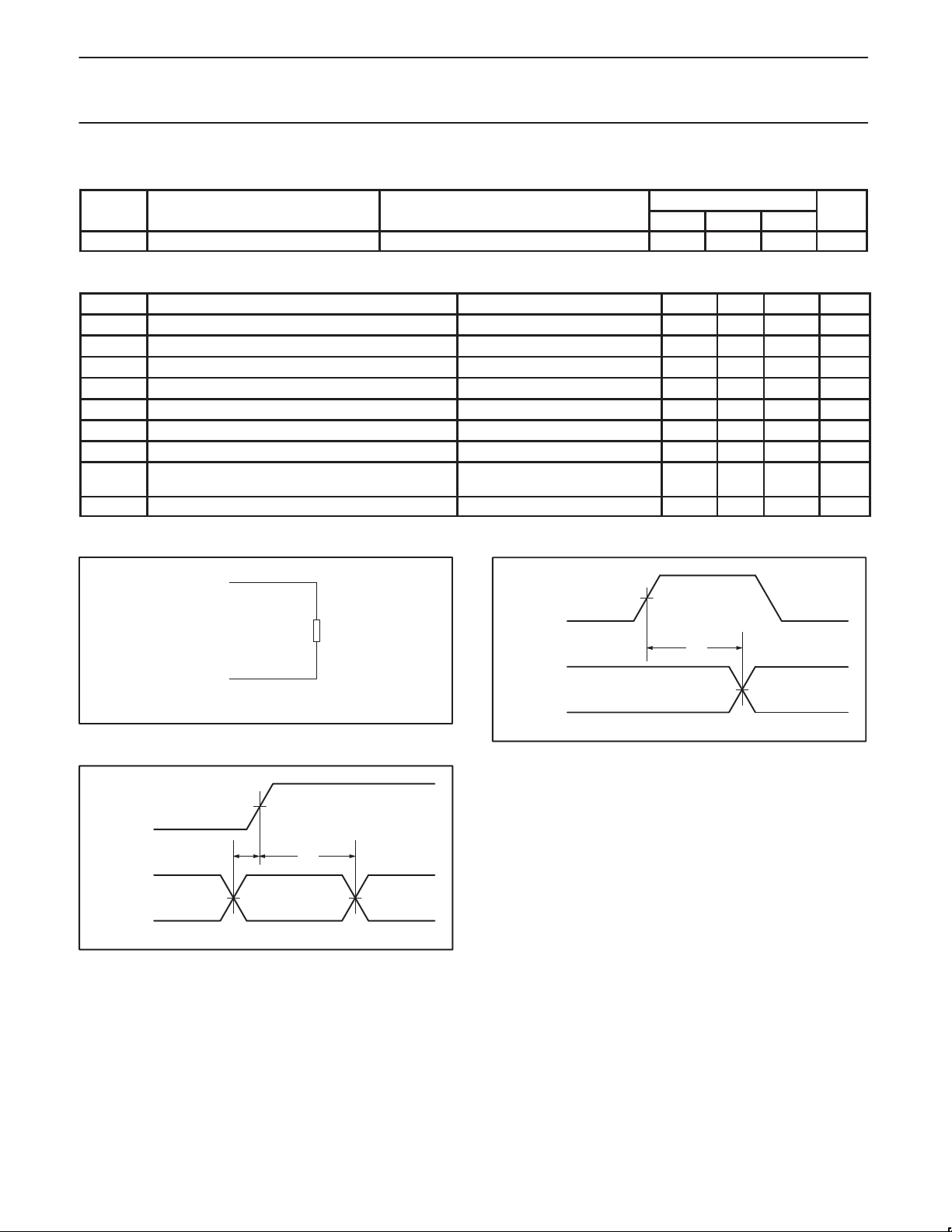
15.0 TIMING WAVEFORMS
TPAn+
TPBn+
56 Ω
TPAn–
TPBn–
SV01098
Figure 1. Test load diagram
SYSCLK
t
SU
Dn, CTLn, LREQ
Figure 2. Dn, CTLn, LREQ input set-up and hold times
t
H
SV01099
SYSCLK
t
D
Dn, CTLn
SV01803
Figure 3. Dn, CTLn, output delay relative to SYSCLK
2002 Oct 1 1
12
Philips Semiconductors Product data
ADDRESS
PDI1394P25BY1-port 400 Mbps physical layer interface
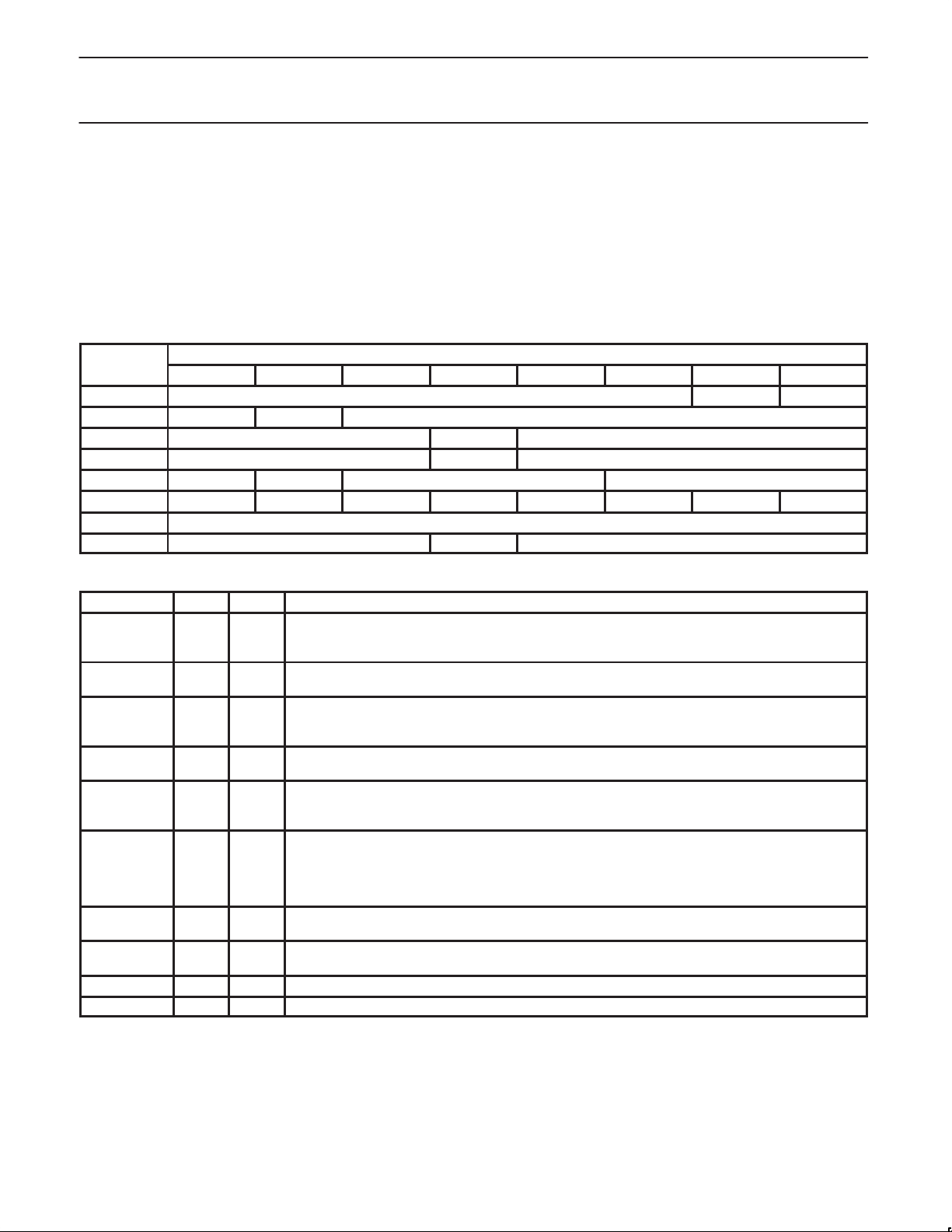
16.0 INTERNAL REGISTER CONFIGURATION
There are 16 accessible internal registers in the PDI1394P25. The
configuration of the registers at addresses 0 through 7 (the base
registers) is fixed, while the configuration of the registers at
addresses 8h through Fh (the paged registers) is dependent upon
which one of eight pages, numbered 0h through 7h, is currently
selected. The selected page is set in base register 7h.
Table 1. Base Register Configuration
0 1 2 3 4 5 6 7
0000 Physical ID R CPS
0001 RHB IBR Gap_Count
0010 Extended (111b) Rsvd Num_Ports (0001b)
0011 PHY_Speed (010b) Rsvd Delay (0001b)
0100 LCtrl C Jitter (000) Pwr_Class
0101 RPIE ISBR CTOI CPSI STOI PEI EAA EMC
0110 Reserved
0111 Page_Select Rsvd Port Select
The configuration of the base registers is shown in Table 1, and
corresponding field descriptions are given in Table 2. The base
register field definitions are unaffected by the selected page number.
A reserved register or register field (marked as Reserved or Rsvd in
the following register configuration tables) is read as 0, but is subject
to future usage. All registers in address pages 2 through 6 are
reserved.
BIT POSITION
Table 2. Base Register Field Descriptions
FIELD SIZE TYPE DESCRIPTION
Physical ID 6 Rd This field contains the physical address ID of this node determined during self-ID. The physical-ID is
R 1 Rd Root. This bit indicates that this node is the root node. The R bit is reset to 0 by bus reset, and is set to
CPS 1 Rd Cable-power-status. This bit indicates the state of the CPS input terminal. The CPS terminal is normally
RHB 1 Rd/Wr Root-holdoff bit. This bit instructs the PHY to attempt to become root after the next bus reset. The RHB
IBR 1 Rd/Wr Initiate bus reset. This bit instructs the PHY to initiate a long (166 µs) bus reset at the next opportunity.
Gap_Count 6 Rd/Wr Arbitration gap count. This value is used to set the subaction (fair) gap, arb-reset gap, and arb-delay
Extended 3 Rd Extended register definition. For the PDI1394P25, this field is 111b, indicating that the extended register
Num_Ports 4 Rd Number of ports. This field indicates the number of ports implemented in the PHY. For the PDI1394P25
PHY_Speed 3 Rd PHY speed capability. For the PDI1394P25, this field is 010b, indicating S400 speed capability.
Delay 4 Rd This field is not applicable for the single-port P25 and should always read as 0001 binary.
invalid after a bus reset until self-ID has completed as indicated by an unsolicited register-0 status
transfer.
1 during tree-ID if this node becomes root.
tied to serial bus cable power through a 390 kΩ resistor. A 0 in this bit indicates that the cable power
voltage has dropped below its threshold for ensured reliable operation.
bit is reset to 0 by a hardware reset, and is unaffected by a bus reset.
Any receive or transmit operation in progress when this bit is set will complete before the bus reset is
initiated. The IBR bit is reset to 0 after a hardware reset or a bus reset.
times. The gap count can be set either by a write to the register, or by reception or transmission of a
PHY_CONFIG packet. The gap count is reset to 3Fh by hardware reset or after two consecutive bus
resets without an intervening write to the gap count register (either by a write to the PHY register or by
a PHY_CONFIG packet).
set is implemented.
this field is 1.
2002 Oct 1 1
13
 Loading...
Loading...