

Philips PCD5008H Datasheet
INTEGRATED CIRCUITS
DATA SH EET
PCD5008
FLEX Pager Decoder
Product specification
Supersedes data of 1997 Oct 27
File under Integrated Circuits, IC17
1998 Jun 17

Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
CONTENTS
1 FEATURES
2 APPLICATIONS
3 GENERAL DESCRIPTION
4 QUICK REFERENCE DATA
5 ORDERING INFORMATION
6 BLOCK DIAGRAM
7 PINNING
8 FUNCTIONAL DESCRIPTION
8.1 General
8.2 Clocking, reset and start-up
8.2.1 Oscillator
8.2.2 Reset and start-up conditions
8.3 Serial peripheral interface (SPI)
8.3.1 General
8.3.2 SPI interconnect
8.3.3 SPI transfer initiated by the host
8.3.4 SPI transfer initiated by the decoder
8.3.5 SPI packet format
8.3.6 SPI timing
8.3.7 Host-to-decoder packets overview
8.3.8 Decoder-to-host packets overview
8.4 Configuration and synchronisation
8.4.1 General
8.4.2 SPI security algorithm
8.4.3 Configuration sequence
8.4.4 Configuration packet (ID = 01H)
8.4.5 Part ID packet (ID = FFH)
8.4.6 Checksum packet (ID = 00H)
8.4.7 Control packet (ID = 02H)
8.4.8 Operating the 1-minute timer
8.4.9 Status packet (ID = 7FH)
8.5 Receiver control interface
8.5.1 General
8.5.2 Low battery detection
8.5.3 Receiver settings at reset
8.5.4 Receiver off state (ID = 10H)
8.5.5 Receiver warm-up sequences
8.5.6 Active receiver states
8.5.7 Forcing receiver lines (ID = 0FH)
8.5.8 Receiver shut-down sequence
8.6 Configuration of the FLEX CAPCODE
8.6.1 General
8.6.2 CAPCODE format
8.6.3 CAPCODE ranges
8.6.4 Address calculation
8.6.5 Phase and frame calculation
8.6.6 Configuration of user addresses
(ID = 78H, 80H to 8FH)
8.6.7 Configuration of assigned frames and pager
collapse (ID = 20H to 27H)
8.6.8 Configuration of assigned phase
8.7 Call data packets
8.7.1 General
8.7.2 Address packet (ID = 01H)
8.7.3 Vector packets (ID = 02H to 57H)
8.7.4 Numeric vector packet
8.7.5 Short message/tone-only vector packet
8.7.6 Hex/binary, alphanumeric, secure message
vectors
8.7.7 Short instruction vector
8.7.8 Message packets (ID = 03H to 57H)
8.7.9 Block Information Word (BIW) packet
(ID = 00H)
8.8 Message reception
8.8.1 FLEX signal structure
8.8.2 Message building
8.8.3 All frame mode (ID = 03H)
8.8.4 Temporary addresses
8.8.5 Message fragmentation
8.8.6 Message checksums
8.8.7 Message numbering
9 LIMITING VALUES
10 DC CHARACTERISTICS
11 AC CHARACTERISTICS
12 OSCILLATOR CHARACTERISTICS
13 THERMAL CHARACTERISTICS
14 HANDLING
15 TEST AND APPLICATION INFORMATION
15.1 Example application
15.2 System block diagram
15.3 FLEX encoding and decoding rules
15.3.1 FLEX encoding rules
15.3.2 FLEX decoding rules
16 PACKAGE OUTLINE
17 SOLDERING
17.1 Introduction
17.2 Reflow soldering
17.3 Wave soldering
17.4 Repairing soldered joints
18 DEFINITIONS
19 LIFE SUPPORT APPLICATIONS
1998 Jun 17 2
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
1 FEATURES
• FLEX paging protocol signal processor
• 16 programmable user address words
• 16 fixed temporary addresses
• 1600, 3200 and 6400 bits/s decoding
• Any-phase or single-phase decoding
• Uses standard serial peripheral interface (SPI) in slave
mode
• Allows low current power-down mode operation of host
processor
• Highly programmable receiver control
• Real-time clock time base
• FLEX fragmentation and group messaging support
• Real-time clock over-the-air update support
• Compatible with synthesized receivers
• Low battery indication (external detector)
• Low cost LQFP32 plastic package
• Operates using a 76.8 kHz crystal
• Very low power consumption
• Operates at low supply voltage.
3 GENERAL DESCRIPTION
This data sheet describes the operation of the PCD5008
integrated paging decoder. It is fully compatible with the
Motorola FLEXchip IC.
The PCD5008, also referred to as the decoder, simplifies
implementation of a FLEX paging device, by being able
to interface with several off-the-shelf paging receivers and
host microcontrollers/processors. Its primary function is to
process information received and demodulated from a
FLEX radio paging channel, select messages addressed
to the paging device and communicate the message
information to the host.
Motorola FLEXstack software, installed on the product
host processor, communicates with the PCD5008 and
interprets the codewords that are passed to the host.
The PCD5008 operates the paging receiver in an efficient
power consumption mode and enables the host to operate
in a low-power mode when no message is being received.
2 APPLICATIONS
• Numeric FLEX pagers
• Alphanumeric FLEX pagers
• Remote metering
• Car security systems
• Personal digital assistants.
4 QUICK REFERENCE DATA
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
DD
I
DD
T
amb
f
EXTAL
supply voltage 1.8 2.2 3.6 V
supply current see Sections 10 and 12 − 6.4 −µA
operating ambient temperature −25 +25 +70 °C
external clock frequency − 76.8 − kHz
5 ORDERING INFORMATION
TYPE
NUMBER
NAME DESCRIPTION VERSION
PACKAGE
PCD5008H LQFP32 plastic low profile quad flat package; 32 leads; body 7 × 7 × 1.4 mm SOT358-1
1998 Jun 17 3
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
6 BLOCK DIAGRAM
handbook, full pagewidth
EXTS0
EXTS1
SYMCLK
OSCPD
XTAL
EXTAL
CLKOUT
12
11
14
2
5
6
OSCILLATOR
32
76.8 kHz
CLOCK
RECEIVER CONTROL
21
22
23
S3
S2
S1
S0
SYMBOL SYNC
SYNC
CORRELATOR
DE-INTERLEAVER
ADDRESS
COMPARATOR
16
18
19
20
S6
S5
S4
S7
3, 13
NOISE
DETECTOR
INTERNAL
CONTROL
UNIT
ERROR
CORRECTOR
LOCAL MESSAGE
FILTER
SPI BUFFER
15
PCD5008
EXTERNAL
CONTROL
UNIT
CONTROL/STATUS
REGISTERS
SPI INTERFACE
32 × 32
RAM
26
27 28 30 31
SS
READY
MOSI
SCK
7, 29
MISO
4
8
24
10
1
25
17
9
MGK259
V
DD1
V
SS1
TEST2
TEST3
RESET
LOBAT
TOUT0
TOUT1
TOUT2
TOUT3
, V
, V
DD2
SS2
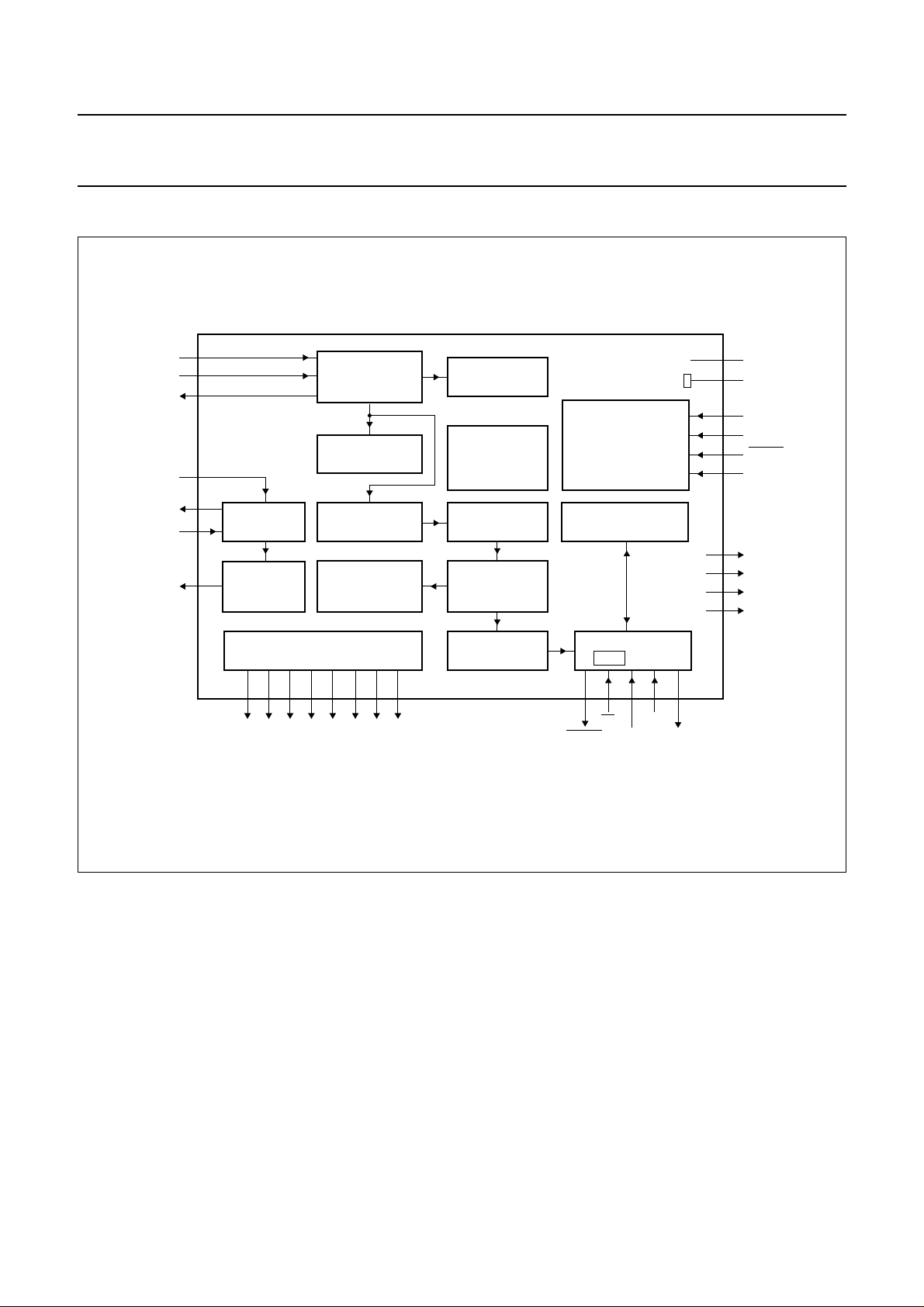
Fig.1 Functional block diagram for PCD5008 pager decoder.
1998 Jun 17 4
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
7 PINNING
PAD
SYMBOL PIN I/O
TOUT0 1 O −1405/1088 3-state test output; note 2
OSCPD 2 I −1405/816 internal oscillator power-down; connected to V
V
DD1
3 −−1405/563 supply voltage
TEST2 4 I −1405/306 manufacturing test mode input pin; has to be connected to V
XTAL 5 O −1405/76 76.8 kHz crystal oscillator output
EXTAL 6 I −1405/−404 76.8 kHz crystal oscillator input or external clock input
V
SS1
7 −−1405/−648 ground supply
TEST3 8 I −1405/−1104 manufacturing test mode input pin; has to be connected to V
TOUT3 9 O −1125/−1400 3-state test output; note 2
LOBAT 10 I −863/−1400 low battery voltage detect input
EXTS1 11 I −633/−1400 most significant bit (MSB) of the symbol currently being decoded
EXTS0 12 I −398/−1400 least significant bit (LSB) of the symbol currently being decoded
V
DD2
13 − 134/−1400 supply voltage
SYMCLK 14 O 569/−1400 recovered symbol clock output
S7 15 O 829/−1400 receiver control output port, 3-state
S6 16 O 1084/−1400 receiver control output port, 3-state
TOUT2 17 O 1405/−1093 3-state test output; note 2
S5 18 O 1405/−718 receiver control output port, 3-state
S4 19 O 1405/−398 receiver control output port, 3-state
S3 20 O 1405/−93 receiver control output port, 3-state
S2 21 O 1405/202 receiver control output port, 3-state
S1 22 O 1405/502 receiver control output port, 3-state
S0 23 O 1405/812 receiver control output port, 3-state
RESET 24 I 1405/1114 active LOW reset input
TOUT1 25 O 1051/1400 3-state test output; note 2
READY 26 O 721/1400 output driven LOW when the PCD5008 is ready for an SPI packet
SS 27 I 404/1400 slave select input for SPI communications
SCK 28 I 149/1400 serial clock input for SPI communications
V
SS2
29 −−100/1400 ground supply
MOSI 30 I −516/1400 data input for SPI communications
MISO 31 O −789/1400 data output for SPI communications, 3-state
CLKOUT 32 O −1084/1400 38.4 kHz clock output (derived from 76.8 kHz oscillator)
COORDINATE
X/Y; note 1
DESCRIPTION
when using the
SS
internal oscillator, connected to VDD when using an external source
SS
SS
Notes
1. The pad coordinates are given in µm relating to the centre of the chip and are used in case of naked die delivery.
2. These test outputs may be either left unconnected or connected to V
in the application.
SS
1998 Jun 17 5
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
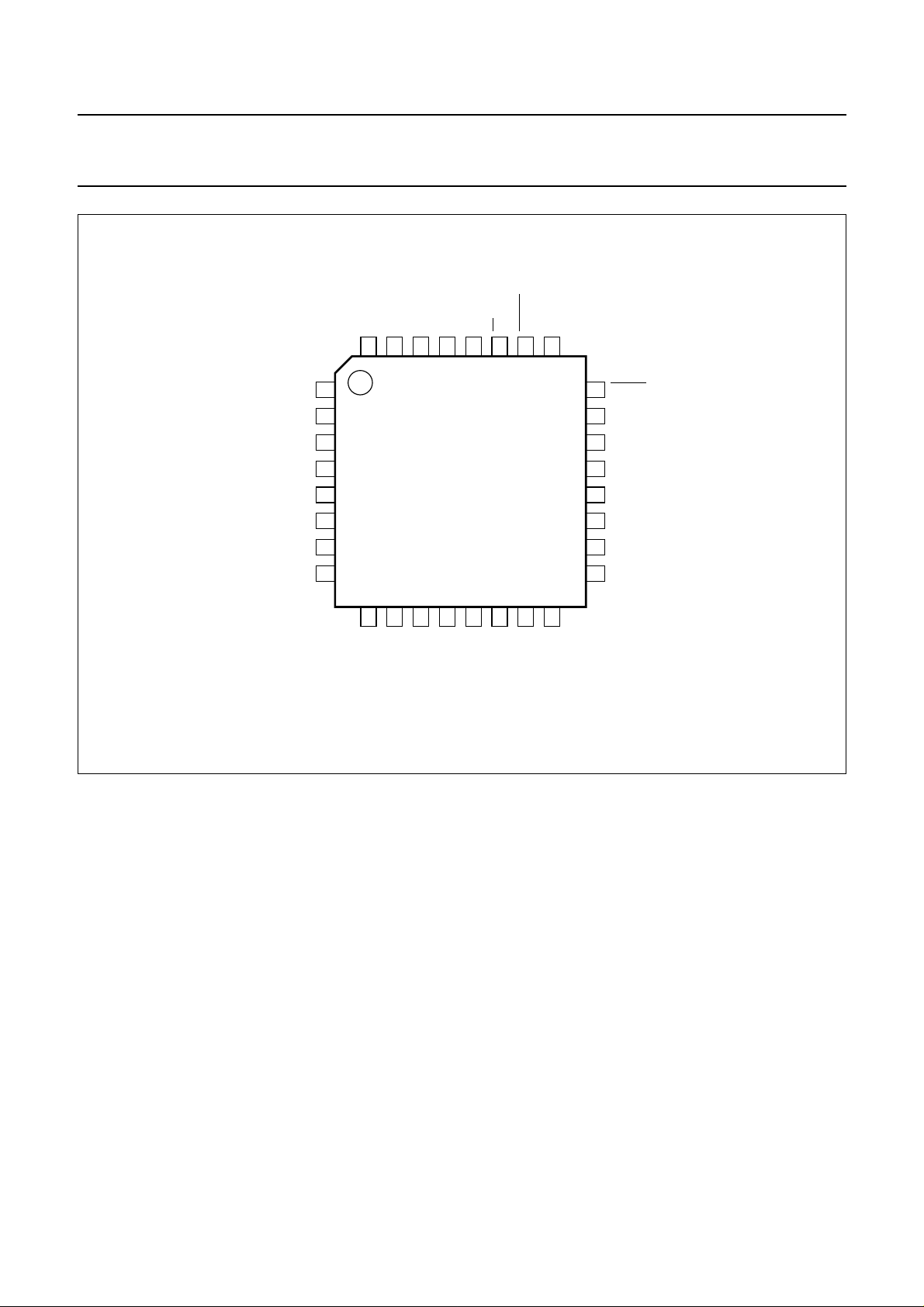
handbook, full pagewidth
MISO
CLKOUT
31
32
MOSI
30
SS2
V
29
SCK
28
SS
27
READY
26
TOUT1
25
V
DD1
TEST2
1
2
3
4
TOUT0
OSCPD
PCD5008H
5
XTAL
6
EXTAL
V
7
SS1
8
TEST3
9
TOUT3
10
LOBAT
11
EXTS1
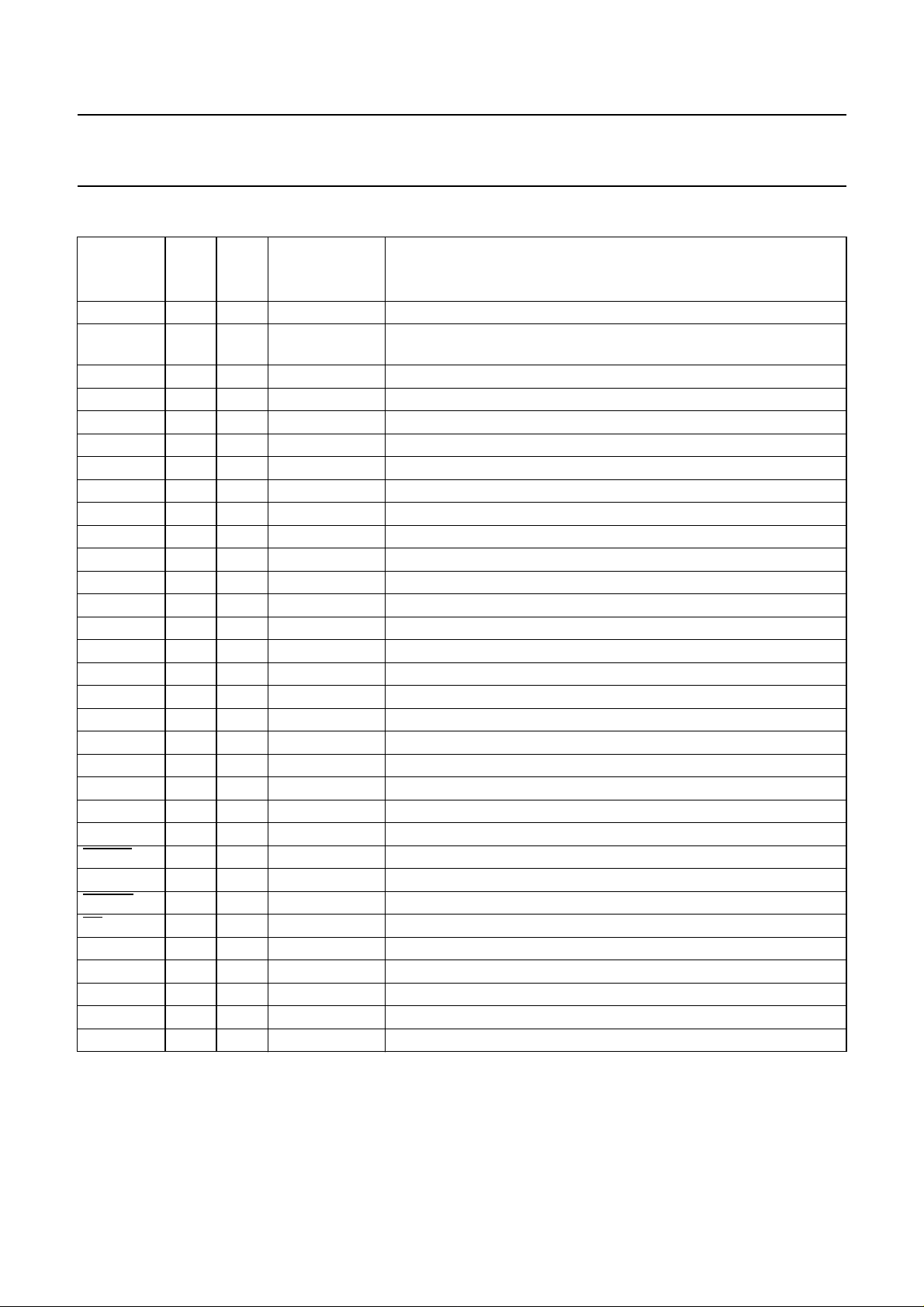
Fig.2 Pin configuration.
8 FUNCTIONAL DESCRIPTION
8.1 General
The PCD5008 simplifies implementation of a FLEX
paging device by interfacing with off-the-shelf components
such as a paging receiver and a microcontroller or
microprocessor (called a host). The PCD5008 is fully
compatible with FLEXstack software which provides a
complete, platform independent, software driver for the
PCD5008.
The PCD5008 fully supports all non-roaming aspects of
the FLEX protocol (version G1.8), and can operate in
either single-phase or any-phase mode. The PCD5008
supports FLEX dynamic grouping, allowing up to
16 temporary addresses to be enabled simultaneously.
It is also capable of retrieving real time information from a
FLEX channel.
RESET
24
S0
23
S1
22
21
S2
20
S3
19
S4
18
S5
17
TOUT2
12
13
14
15
16
S6
MGK257
EXTS0
DD2
V
S7
SYMCLK
The PCD5008 connects to any receiver capable of
providing a 2-bit digital signal. The PCD5008 operates the
paging receiver in an efficient power consumption mode.
The PCD5008 has 8 receiver control lines used for
warming up, operating and shutting down a receiver in
stages.
The PCD5008 has the ability to detect a battery-low signal
from an external detector during the receiver control
sequences.
The PCD5008 carries out the following functions:
• Synchronises to a FLEX data stream
• Processes received, demodulated information
• Performs de-interleaving and error correction
• Selects calls addressed to the paging device using up to
16 programmable addresses
• Communicates the message information to the host.
1998 Jun 17 6
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
The PCD5008 interfaces to a host through a serial
peripheral interface (SPI). The host can then interpret the
message information in an appropriate manner (numeric,
alphanumeric, binary, etc.). This function is provided by
the FLEXstack software.
The PCD5008 enables the host to operate in a low power
mode when no message information for the paging device
is being received. It has a 38.4 kHz clock output capable
of driving other devices, and has a 1-minute timer that
offers low-power support for a real-time clock function on
the host. The host can use receiver control lines which are
not required by the receiver as expansion ports to control
other peripheral devices.
8.2 Clocking, reset and start-up
8.2.1 O
SCILLATOR
The PCD5008 uses an inverting crystal oscillator.
The clock signal for the internal circuitry is derived via an
amplifier from the oscillator input pin EXTAL. Alternatively,
an external clock signal can be fed in at input pin EXTAL.
In this case the internal oscillator can be disabled by
pulling the OSCPD input pin HIGH.This reduces current
consumption and routes EXTAL directly to the internal
clock signal. When using a crystal, an external feedback
resistor and the load capacitances need to be connected
to pins EXTAL and XTAL (Fig.18). See Section 12 for the
recommended crystal parameters and the specification of
the oscillator transconductance to guarantee correct
start-up.
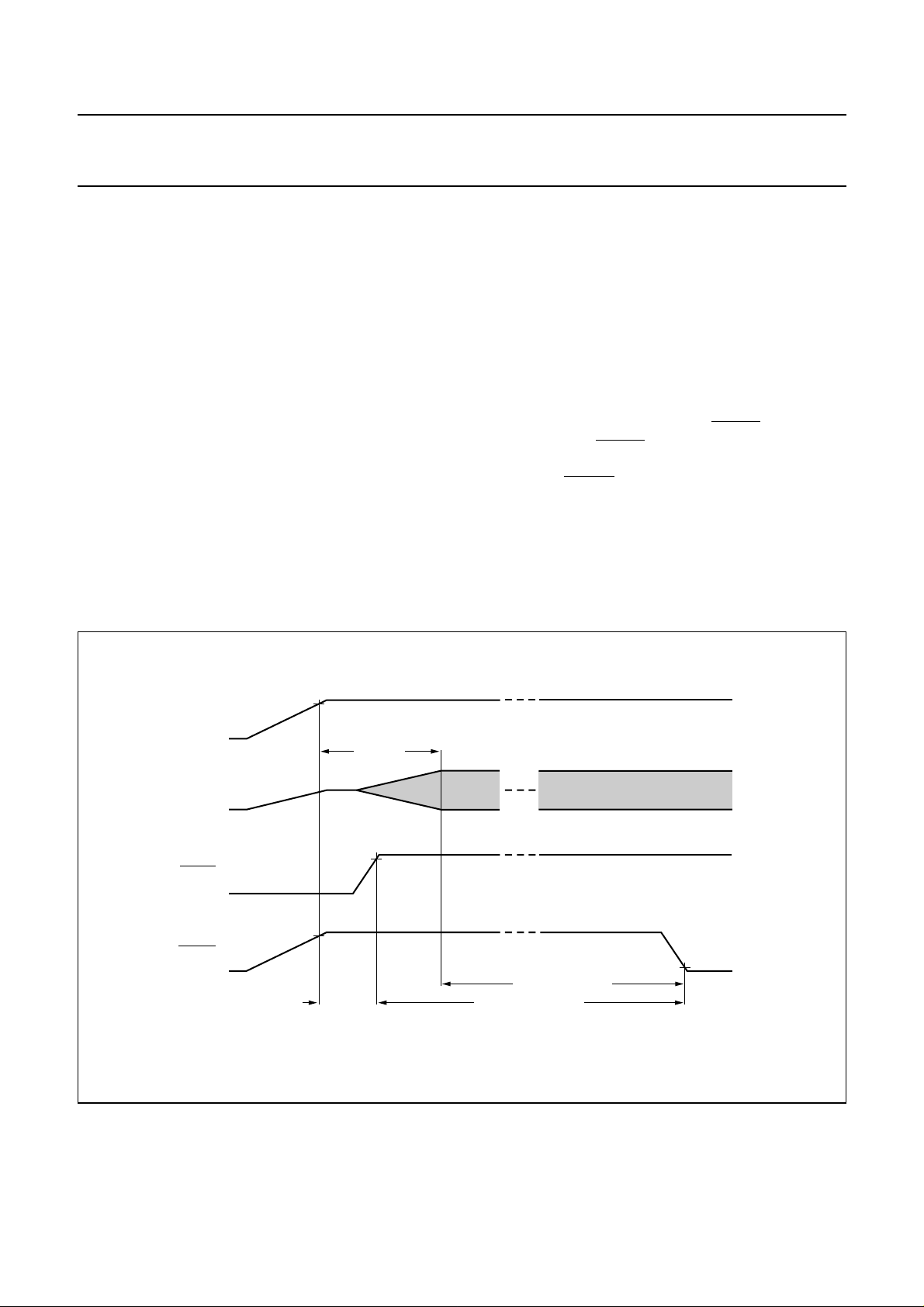
8.2.2 R
ESET AND START-UP CONDITIONS
The PCD5008 is reset by pulling the RESET input LOW.
After releasing the RESET by pulling it HIGH, the
PCD5008 counts 76800 clock cycles (typically 1 second)
before pulling READY LOW to indicate that the decoder is
ready for configuration via the SPI.
See Fig.3 and Section 11 for the PCD5008 timing
specifications when power is applied.
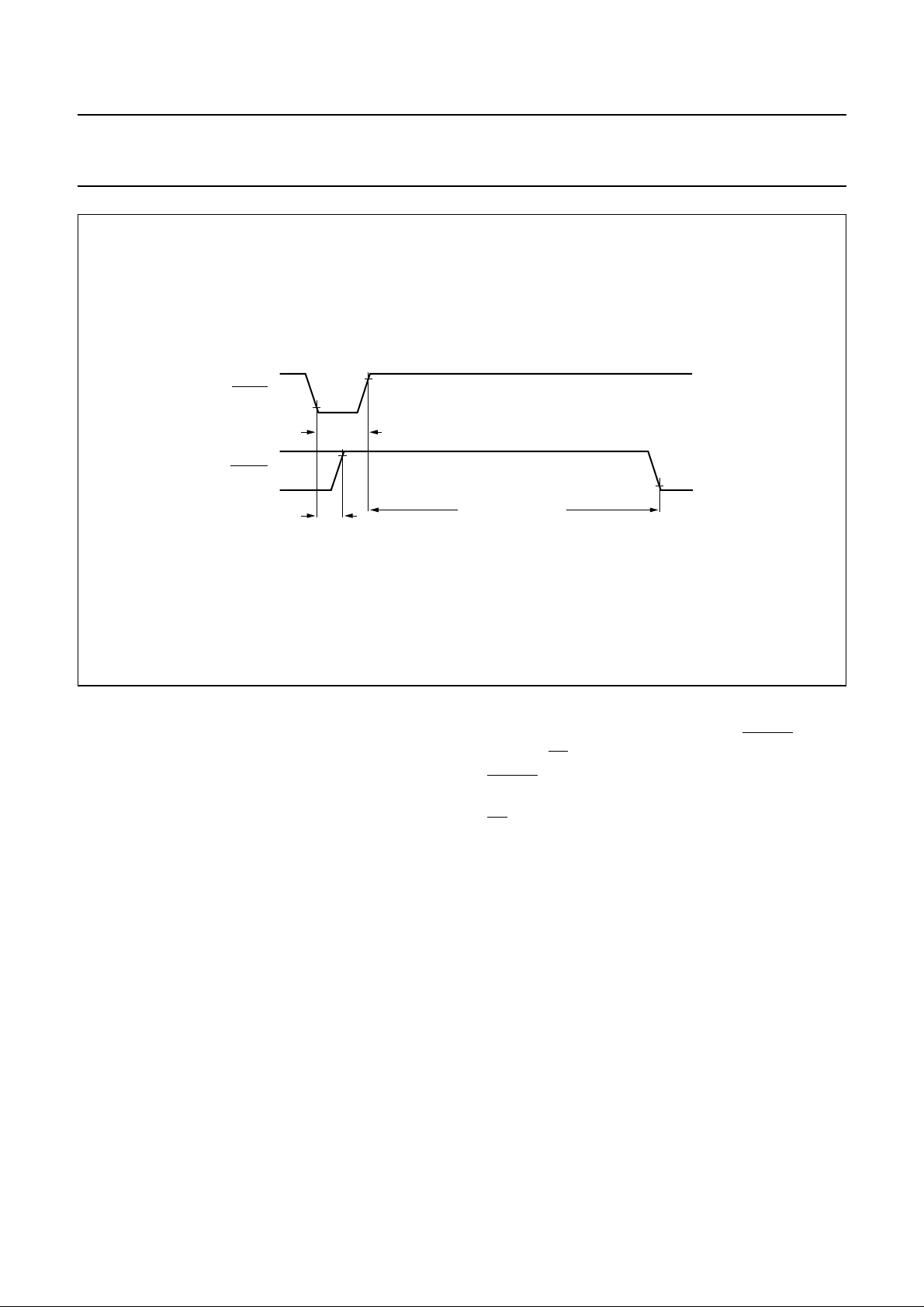
See Fig.4 and Section 11 for the PCD5008 timing
specifications when it is reset.
handbook, full pagewidth
oscillator
V
DD
RESET
READY
t
h(rst)
t
strt(osc)
Fig.3 Start-up timing.
t
WUL(osc-READY)
t
HL(RESET-READY)
MBK031
1998 Jun 17 7
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
handbook, full pagewidth
RESET
t
W(rst)
READY
t
t
LH(RESET-READY)
HL(RESET-READY)
MBK033
Fig.4 Reset timing.
8.3 Serial peripheral interface (SPI)
8.3.1 G
ENERAL
All data communication between the PCD5008 and the
host is done via the SPI using 32-bit data packets at data
rates up to 1 Mbits/s. SPI transfers are full-duplex and can
be initiated by either the host which acts as the SPI master
providing the data clock for packet transfer, or the
PCD5008 as an SPI slave.
The host can send packets to configure or control the
PCD5008 or a checksum packet to validate SPI
communication (Section 8.4.2). The PCD5008 buffers
data packets, relating to received data, into a 32 packet
transmit buffer. The PCD5008 can send either a status
packet, a part ID packet, or packets from the transmit
buffer. In the event of a buffer overflow, the PCD5008
stops decoding and clears the transmit buffer.
8.3.2 SPI
INTERCONNECT
Connection on the PCD5008 consists of a READY pin and
4 SPI pins (SS, SCK, MOSI and MISO):
READY: output signal; indicates that data is available
from the PCD5008
SS: SPI select; used as PCD5008 chip select
SCK: serial clock; output from the host used for clocking
data
MOSI: master output slave input; data output from the
host
MISO: master input slave output; data output from the
PCD5008.
1998 Jun 17 8
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
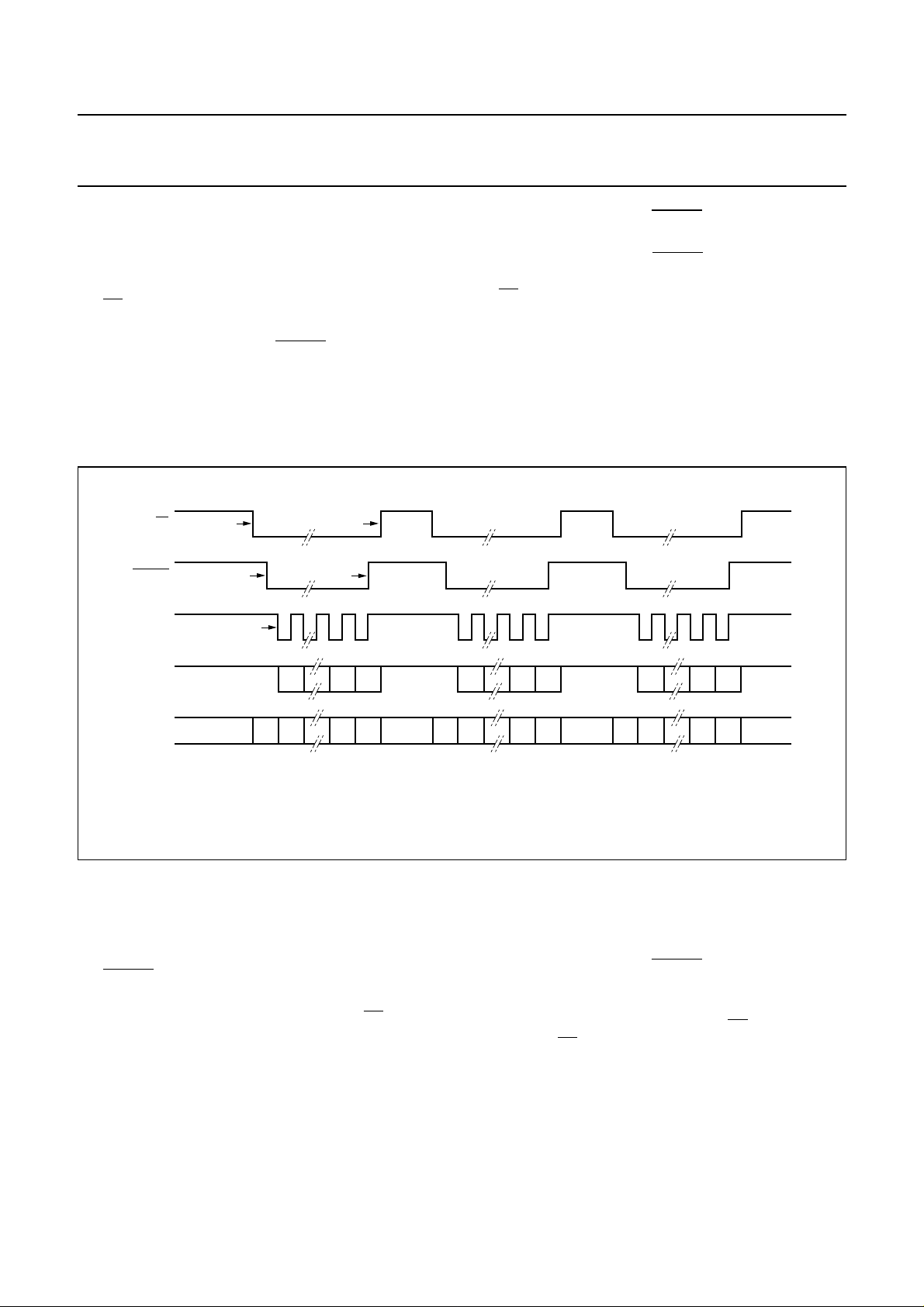
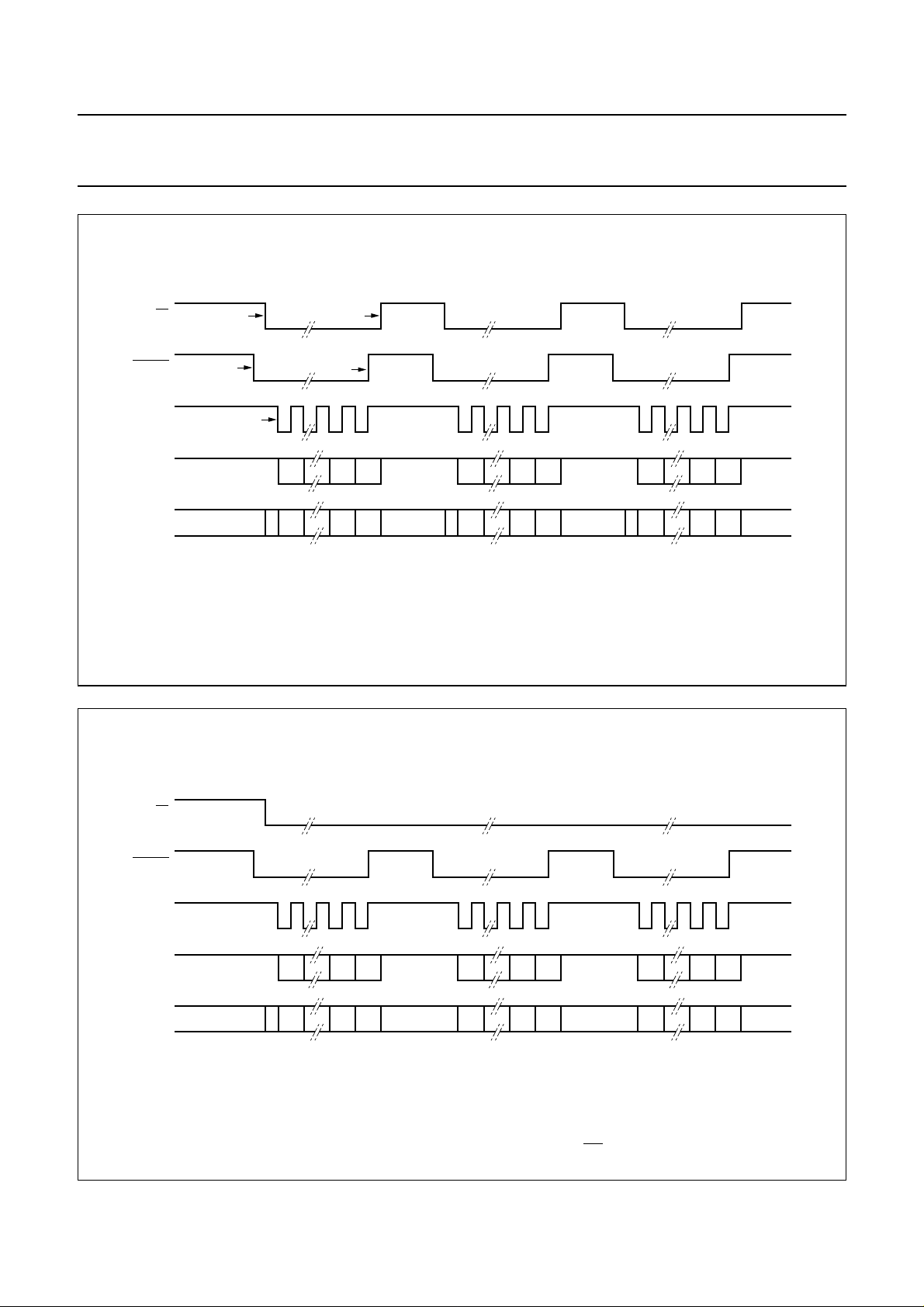
8.3.3 SPI TRANSFER INITIATED BY THE HOST
The following steps occur when the host initiates an SPI
packet transfer, see Fig.5 for event timings:
1. The host selects the PCD5008 by driving the
SS pin LOW.
2. The PCD5008 indicates that it is ready to start the
SPI transfer by driving the READY pin LOW.
3. The host clocks each of the 32 bits of the SPI packet
by pulsing SCK. Both the host and the PCD5008
sample data on the rising edge of SCK. Packets are
sent MSB first.
handbook, full pagewidth
SS
READY
SCK
(1) (5)
(2)
(3)
(4)
4. The PCD5008 pulls the
READY line HIGH, to indicate
that the transfer is complete.
5. The host waits until the READY line is pulled HIGH,
then de-selects the PCD5008 SPI by driving the
SS pin HIGH.
6. The first 5 steps are repeated for each additional
packet.
MOSI
MISO
Numbers within parenthesis refer to sequence numbers, see Section 8.3.3.
Z
o(off)
D31 D1 D0
D31 D1 D0
Z
o(off)
Fig.5 Typical multiple SPI transfers initiated by the host.
8.3.4 SPI TRANSFER INITIATED BY THE DECODER
The following steps occur when the PCD5008 initiates an
SPI packet transfer, see Fig.6 for event timings:
1. The PCD5008 initiates the SPI transfer by driving the
READY pin LOW.
2. If the PCD5008 is not already selected, the host
selects the PCD5008 SPI by driving the SS pin LOW.
D31 D1 D0
D31 D1 D0
Z
o(off)
D31 D1 D0
D31 D1 D0
Z
o(off)
MGK262
3. The host clocks each of the 32 bits of the SPI packet
by pulsing SCK. Both the host and the PCD5008
sample data on the rising edge of SCK. Packets are
sent MSB first.
4. The PCD5008 pulls the
READY line HIGH, to indicate
that the transfer is complete.
5. The host may then either de-select the SPI interface of
the PCD5008 (Fig.7) by driving the SS pin HIGH or
maintain SS LOW to continue sending packets to the
PCD5008.
1998 Jun 17 9
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
handbook, full pagewidth
Numbers within parenthesis refer to sequence numbers, see Section 8.3.4.
SS
READY
SCK
MOSI
MISO
(2) (5)
(1)
(3)
D31 D1 D0
Z
o(off)
D31 D1 D0
(4)
Z
o(off)
Fig.6 Typical multiple SPI transfers initiated by the PCD5008.
D31 D1 D0
D31 D1 D0
Z
o(off)
D31 D1 D0
D31 D1 D0
Z
o(off)
MGK263
handbook, full pagewidth
SS
READY
SCK
MOSI
MISO
Z
o(off)
D31 D1 D0
D31 D1 D0
Fig.7 Multiple SPI transfers initiated by the PCD5008 with SS maintained LOW.
1998 Jun 17 10
D31 D1 D0
D31 D1 D0
D31 D1 D0
D31 D1 D0
MGK264
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
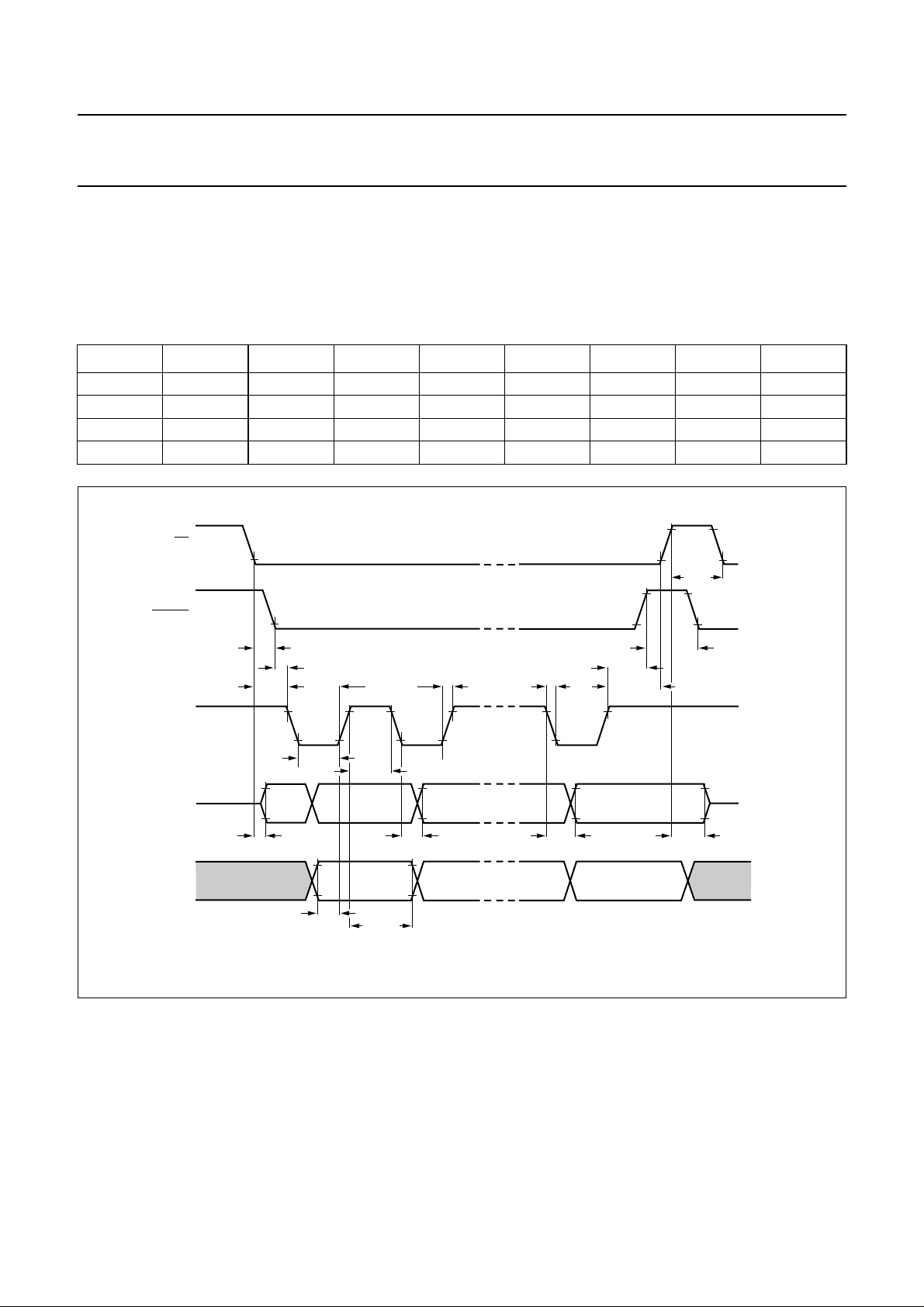
8.3.5 SPI PACKET FORMAT
SPI data packets consist of an 8-bit ID (byte 3), followed
by 24 bits of information (byte 2 to byte 0). See Table 1,
8.3.6 SPI TIMING
See Fig.8 and Chapter 11 for the timing specifications of
the SPI.
note that bit 7 of byte 3 is the first bit on the bus.
Table 1 Packet bit assignments
BYTE BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
3 D31 D30 D29 D28 D27 D26 D25 D24
2 D23 D22 D21 D20 D19 D18 D17 D16
1 D15 D14 D13 D12 D11 D10 D9 D8
0D7D6D5D4D3D2D1D0
handbook, full pagewidth
SS
t
SSH
READY
t
READYH
t
t
f
LAG2
t
LAG1
t
LEAD1
t
d(SS-READY)
t
LEAD2
T
cy(SCK)
t
r
SCK
t
SCKL
Z
o(off)
MISO D31 D0
t
ACC(o)
MOSI
t
su(i)(D)
t
SCKH
t
DOV
D31 D0
t
h(i)(D)
t
h(o)(D)
Fig.8 SPI timing.
t
o(dis)
MBK032
1998 Jun 17 11
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
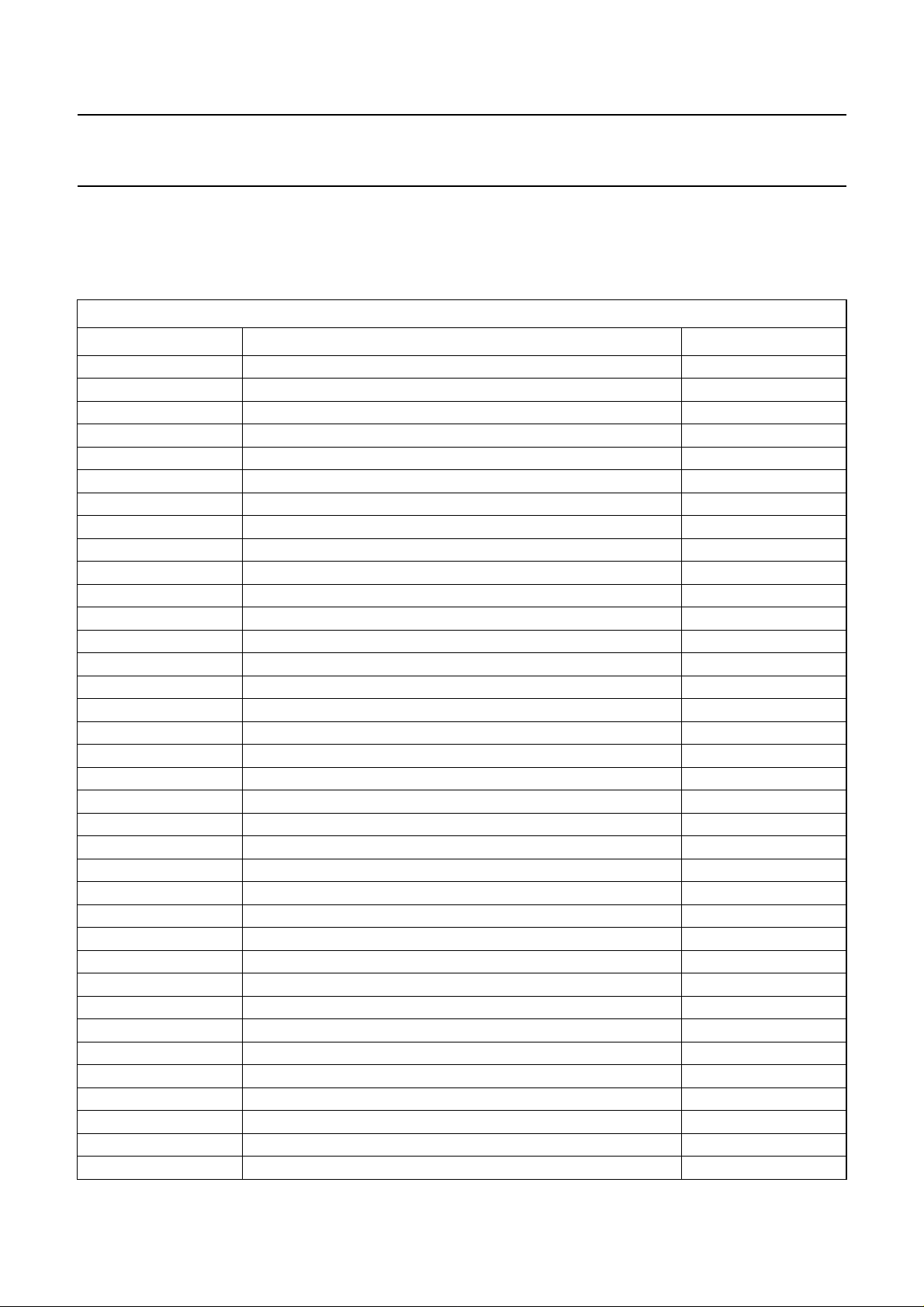
8.3.7 HOST-TO-DECODER PACKETS OVERVIEW
This section summarises the packets which can be sent from the host to the decoder.
Table 2 Host-to-decoder packet ID map
PACKET
ID (HEX) TYPE SECTION
00 checksum 8.4.6
01 configuration 8.4.4
02 control 8.4.7
03 all frame mode 8.8.3
04 to 0E reserved (host should never send) −
0F receiver line control 8.5.7
10 receiver control configuration (off setting) 8.5.4
11 receiver control configuration (warm-up 1 setting) 8.5.5.3
12 receiver control configuration (warm-up 2 setting) 8.5.5.3
13 receiver control configuration (warm-up 3 setting) 8.5.5.3
14 receiver control configuration (warm-up 4 setting) 8.5.5.3
15 receiver control configuration (warm-up 5 setting) 8.5.5.3
16 receiver control configuration (3200 sps sync setting) 8.5.6.2
17 receiver control configuration (1600 sps sync setting) 8.5.6.2
18 receiver control configuration (3200 sps data setting) 8.5.6.2
19 receiver control configuration (1600 sps data setting) 8.5.6.2
1A receiver control configuration (shut-down 1 setting) 8.5.8.1
1B receiver control configuration (shut-down 2 setting) 8.5.8.1
1C to 1F special (ignored by decoder) −
20 frame assignment (frames 112 to 127) 8.6.7
21 frame assignment (frames 96 to 111) 8.6.7
22 frame assignment (frames 80 to 95) 8.6.7
23 frame assignment (frames 64 to 79) 8.6.7
24 frame assignment (frames 48 to 63) 8.6.7
25 frame assignment (frames 32 to 47) 8.6.7
26 frame assignment (frames 16 to 31) 8.6.7
27 frame assignment (frames 0 to 15) 8.6.7
28 to 77 reserved (host should never send) −
78 user address enable 8.6.6
79 to 7F reserved (host should never send) −
80 user address assignment (user address 0) 8.6.6
81 user address assignment (user address 1) 8.6.6
82 user address assignment (user address 2) 8.6.6
83 user address assignment (user address 3) 8.6.6
84 user address assignment (user address 4) 8.6.6
85 user address assignment (user address 5) 8.6.6
1998 Jun 17 12
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
PACKET
ID (HEX) TYPE SECTION
86 user address assignment (user address 6) 8.6.6
87 user address assignment (user address 7) 8.6.6
88 user address assignment (user address 8) 8.6.6
89 user address assignment (user address 9) 8.6.6
8A user address assignment (user address 10) 8.6.6
8B user address assignment (user address 11) 8.6.6
8C user address assignment (user address 12) 8.6.6
8D user address assignment (user address 13) 8.6.6
8E user address assignment (user address 14) 8.6.6
8F user address assignment (user address 15) 8.6.6
90 to FF reserved (host should never send) −
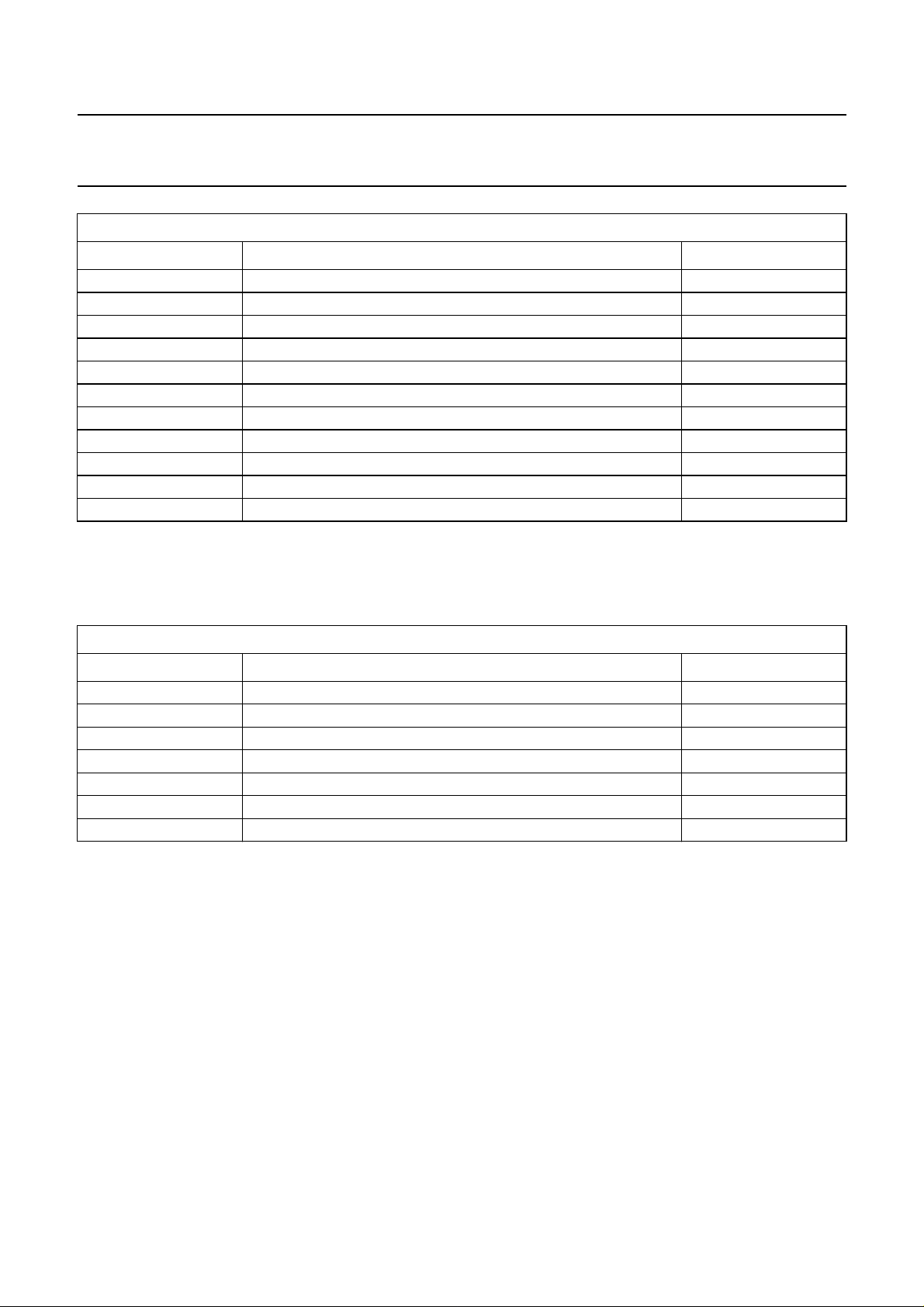
8.3.8 DECODER-TO-HOST PACKETS OVERVIEW
This section summarises the packets which can be sent from the PCD5008 to the host (Table 3).
Table 3 Decoder-to-host packet ID map
PACKET
ID (HEX) TYPE SECTION
00 block information word 8.7.9
01 address 8.7.2
02 to 57 vector or message (ID is word number in frame) 8.7.3, 8.7.8
58 to 7E reserved −
7F status 8.4.9
80 to FE reserved −
FF part ID 8.4.5
1998 Jun 17 13
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
8.4 Configuration and synchronisation
8.4.1 G
ENERAL
After a reset, all configuration data has to be (re)loaded
into the PCD5008 by the host using the SPI. PCD5008
features which do not change during operation are
configured using the configuration packet (Section 8.4.4),
the receiver control packets (Section 8.5) and the address
configuration packets (Section 8.6). PCD5008 features
which can be changed during operation are configured
using the control packet. The checksum packet ensures
proper communication between the host and the
PCD5008.
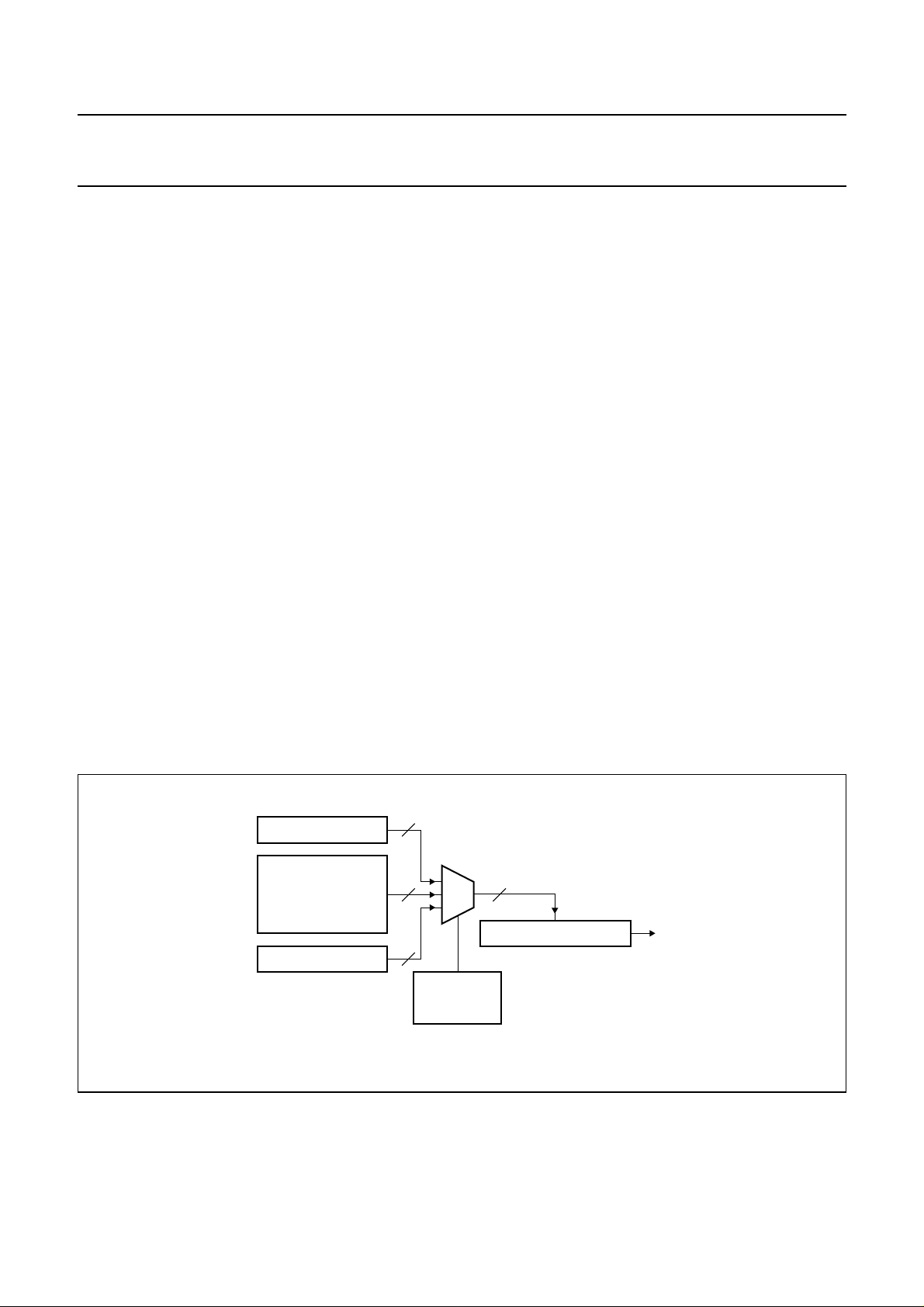
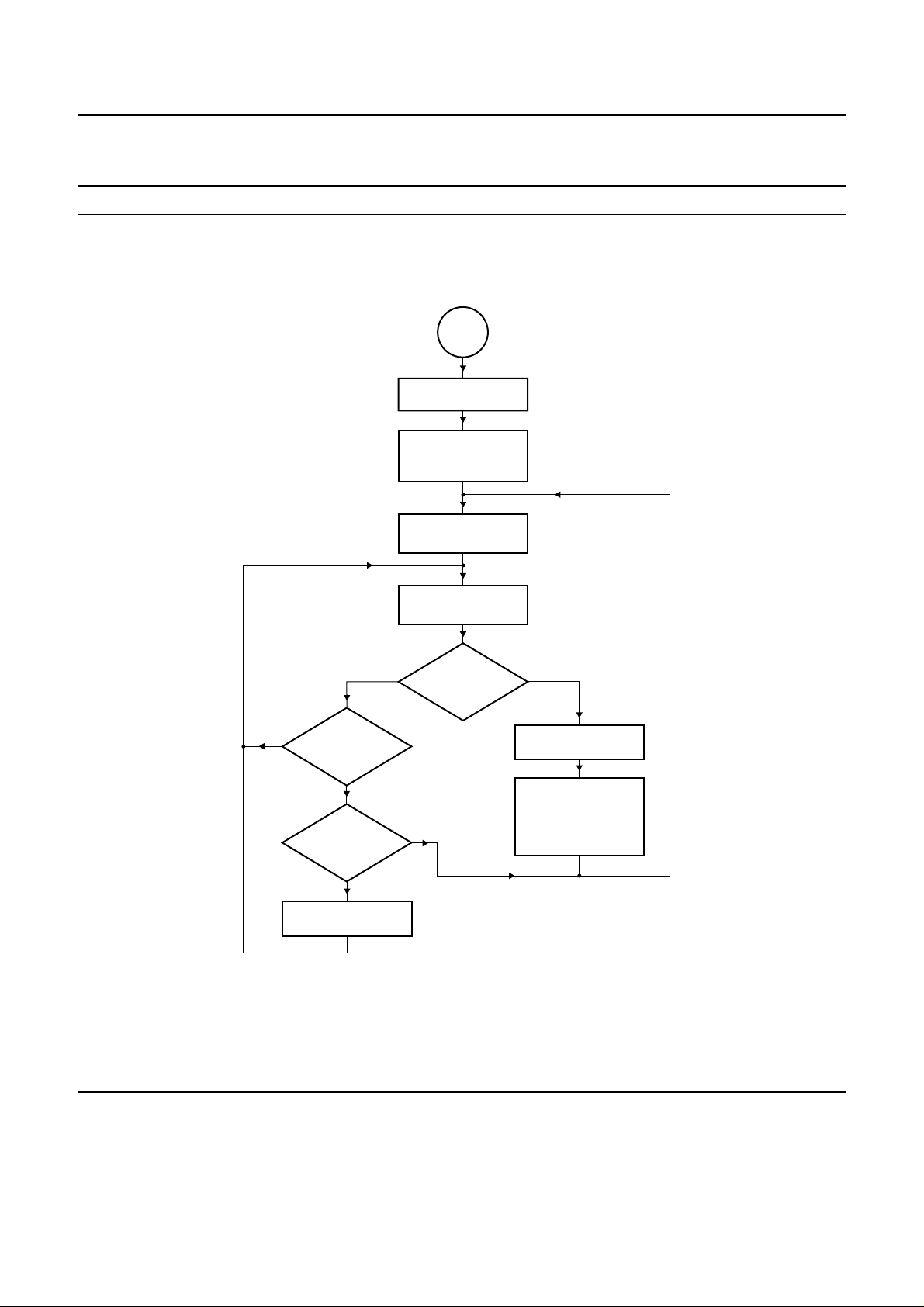
8.4.2 SPI
SECURITY ALGORITHM
The PCD5008 provides a security algorithm to verify
correct SPI operation (Figs 9 and 10). The PCD5008
maintains a checksum register equal to the result of
XORing the 24 data bits of every packet it receives, except
the checksum packet 00H and special packets
1CH to 1FH. When the PCD5008 is reset, the internal
checksum register is initialized to the 24 bit part ID defined
in the part ID packet.
Immediately following a reset and whenever the host
sends a packet other than a checksum packet, the
SPI output of status and data (SPI transmit) is disabled.
The PCD5008 then initiates SPI transfers continuously,
sending the part ID packet (Section 8.4.5). Note that when
SPI transmit is disabled all decoding and timing functions
are unaffected. The SPI transmit can be enabled by
sending a checksum packet for which the checksum value
matches the checksum register.
Any checksum packets sent when the SPI transmit is
enabled, are ignored by the PCD5008 irrespective of the
value of the checksum packet data bits. Thus when the
PCD5008 initiates an SPI transfer and the host has no
data to send, the host should send the checksum packet
so as not to disable the SPI transmit. The data in the
checksum packet could be a null packet (32 bit stream of
all zeros).
Sending a packet other than the checksum packet when
the SPI transmit is enabled causes the SPI transmit to be
disabled until a checksum packet is sent with the correct
value. Thus when the host re-configures the PCD5008
after a reset, the SPI transmit is disabled until the host
sends a checksum packet at the end of the configuration
data, with the checksum value equal to the result of
XORing together the data bits of each of the configuring
packets and the data bits of the part ID packet.
If the SPI transmit is enabled and there is data in the
transmit buffer, the PCD5008 initiates an SPI transfer
sending a packet from its transmit buffer. The PCD5008
sends the status packet (which is not buffered) when the
host initiates an SPI transfer and the transmit buffer is
empty.
handbook, full pagewidth
PART ID REGISTER
32 × 32 DATA PACKET
FIFO TRANSMIT
BUFFER
STATUS REGISTER
32
32 32
32
MUX
SPI
SECURITY
ALGORITHM
Fig.9 SPI transmit functional block diagram.
1998 Jun 17 14
SPI TRANSMIT REGISTER
MISO
MGK261
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
handbook, full pagewidth
reset
PCD5008 disables
SPI transmit
PCD5008 initializes
checksum register
to part ID value
PCD5008 initiates
part ID packet
Y
matches checksum
register data?
PCD5008 enables
PCD5008 waits for
SPI packet from host
YN
PCD5008
SPI transmit
enabled?
N
packet data
Y
SPI transmit
checksum packet?
N
PCD5008 disables
SPI transmit
PCD5008 sets
checksum registers to
the XOR of the packet
data bits with the
checksum register bits
MGK260
Fig.10 SPI security algorithm.
1998 Jun 17 15
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
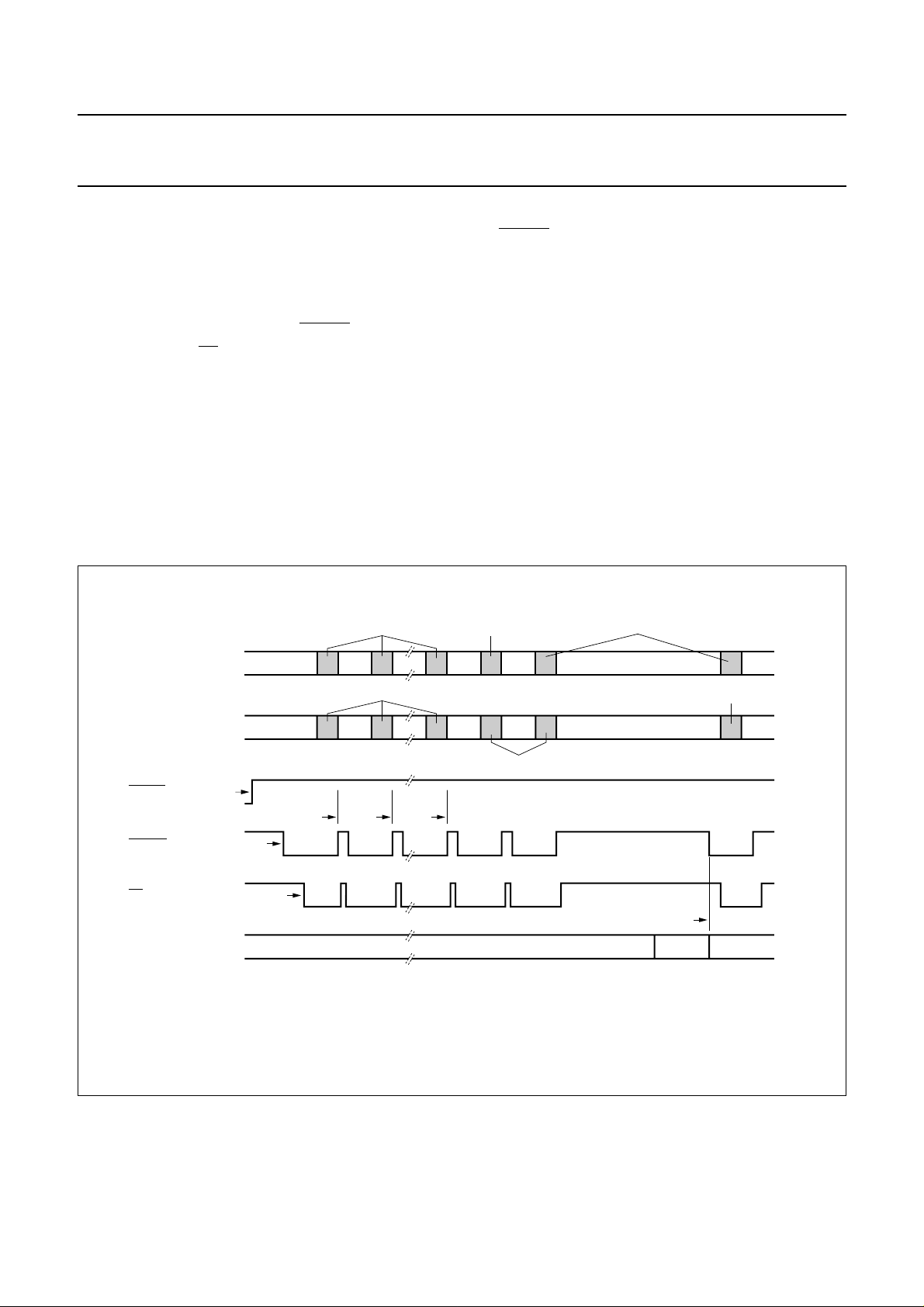
8.4.3 CONFIGURATION SEQUENCE
A typical configuration and synchronisation sequence
would be as follows, see Fig.11 for event timings:
1. The PCD5008 is reset by the host.
2. After 1 second the PCD5008 interrupts the host to
read the part ID by pulling the READY line LOW.
3. The host pulls SS LOW at the start of each
SPI transfer and clocks out the part ID data.
4. The host configures the following aspects of PCD5008
operation:
a) General configuration (Section 8.4.4)
b) Receiver operation (Section 8.5)
c) FLEX CAPCODE configuration (Section 8.6).
The PCD5008 writes a part ID packet in response to
each incoming packet.
handbook, full pagewidth
SPI
HOST-TO-DECODER
configuration packets
(addresses, receiver etc.)
partid packet
(4)
5. At the end of each packet the PCD5008 pulls the
READY line HIGH, and then LOW again to indicate
that packet processing is complete.
6. The host writes a control packet to enable FLEX
decoding in the PCD5008 (Section 8.4.7).
7. The host writes a checksum packet to enable SPI data
output by the PCD5008 (Section 8.4.2).
8. On recognising a SYNC word, the PCD5008
synchronises to the channel.
9. The PCD5008 initiates an SPI transfer writing the
status packet, indicating that it is now in synchronous
mode.
control packet
(6)
checksum packet
(7)
status packet
(9)
SPI
DECODER-TO-HOST
RESET
READY
SS
FLEX DATASTREAM
Numbers within parenthesis refer to sequence numbers, see Section 8.4.3.
(1)
(5) (5) (5)
(2)
(3)
Fig.11 Typical configuration and synchronisation sequence.
partid packet
(4)
(8)
SYNC
MBK097
1998 Jun 17 16
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
8.4.4 CONFIGURATION PACKET (ID = 01H)
The configuration packet defines a number of different
configuration options for the PCD5008. The PCD5008
ignores this packet when decoding is enabled,
i.e. the ON bit in the control packet is set (Table 11).
OFD: oscillator frequency difference (Tables 4 and 5).
These bits represent the maximum frequency difference
between the 76.8 kHz oscillator (accounting for ageing,
temperature variation, manufacturing tolerance etc.) and
the worst case transmitter bit rate (specified in FLEX as
±25 parts per million (ppm), see Section 15.3.1).
For example, if the transmitter tolerance is ±25 ppm and
the 76.8 kHz oscillator tolerance is ±140 ppm, the
transmitter-oscillator frequency difference is ±165 ppm
and OFD should be cleared (300 ppm max.). Value after
reset = 0. Note that configuring a smaller frequency
difference in this packet results in lower power
consumption due to higher receiver battery save ratios.
SME: synchronous mode enable (Table 5). When this bit
is set, a status packet is sent automatically whenever the
synchronous mode update (SMU) bit in the status packet
is set. This happens whenever a change occurs in the
synchronous mode (SM) status bit, which indicates that
the decoder is synchronized to a FLEX data stream.
The host can use the SM bit in the status packet as an
in-range/out-of-range indication. Value after reset = 0.
bit is set, the CLKOUT pin is driven HIGH. Note that
setting and clearing this bit can cause pulses on the
CLKOUT pin that are less than one half the 38.4 kHz
period. Also note that when the clock output is enabled, the
CLKOUT pin always outputs the 38.4 kHz signal even
when the PCD5008 is in reset. Value after reset = 0.
MTE: minute timer enable (Table 5). When this bit is set,
a status packet is sent at one minute intervals with the
minute time-out (MT) bit in the status packet set. When
this bit is clear, the internal 1-minute timer stops counting.
See Section 8.4.8 for details of 1-minute timer operation.
Value after reset = 0.
LBP: low battery polarity (Table 5). This bit defines the
polarity of the PCD5008’s LOBAT pin: When this bit is set,
a HIGH at input LOBAT represents a low battery condition.
The LB bit in the status packet is initialized to the inverse
(i.e. inactive) value of the LBP bit when the PCD5008 is
turned on (by setting the ON bit in the control packet).
When the PCD5008 is turned on, the first low battery
update in the status packet is sent to the host when a low
battery condition is detected on the LOBAT pin. Value
after reset = 0.
SP: signal polarity (Tables 5, 6 and 7). These bits set the
polarity of EXTS1 and EXTS0 input signals. The polarity of
the EXTS1 and EXTS0 bits is determined by the receiver
design. Value after reset = 0.
MOT: maximum off time (Table 5). When this bit is set, the
PCD5008 assumes that there can be up to 1 minute
between transmitted frames on the paging system. When
this bit is clear, the PCD5008 assumes that there can be
up to 4 minutes between transmitted frames on the paging
system. This setting is determined by the service provider.
Value after reset = 0.
COD: clock output disable (Table 5). When this bit is clear,
a 38.4 kHz signal is output on the CLKOUT pin. When this
Table 4 Maximum oscillator frequency difference
OFD
1
OFD
FREQUENCY DIFFERENCE
0
(ppm)
00±300
01±150
10±75
11±0
Table 5 Configuration packet bit assignments
BYTE BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
300000001
2000000OFD
1000000SP
1
1SP0
OFD
0 SME MOT COD MTE LBP 0 0 0
0
1998 Jun 17 17
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
Table 6 Input signal polarity
SIGNAL POLARITY
SP
1
SP
0
EXTS1 EXTS0
0 0 normal normal
8.4.5 PART ID PACKET (ID = FFH)
The part ID packet is output by the PCD5008 SPI
whenever the SPI transmit is disabled due to the
checksum feature.
MDL: model (Table 8). The PCD5008 model value is 0.
0 1 normal inverted
1 0 inverted normal
1 1 inverted inverted
CID: compatibility ID (Table 8). This value describes other
parts with the same model number, which are compatible
with this part. The PCD5008 compatibility value is 1.
Devices which implement a superset of PCD5008
Table 7 FLEX 4 level FSK modulation selection
FSK MODULATION
EXTS1 EXTS0
AT SP = 0,0
(Hz)
functionality have MDL cleared and CID0set.
REV: revision (Table 8). This identifies the manufacturing
version of the PCD5008. For the PCD5008 the value is 6.
Compatible parts have values in the range 0 to 5.
1 0 +4800
1 1 +1600
01 −1600
00 −4800
8.4.6 C
See Table 9 for checksum packet bit assignment.
CV: checksum value (24 bits), see Section 8.4.2.
HECKSUM PACKET (ID = 00H)
Table 8 Part ID packet bit assignments
BYTE BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
311111111
2 MDL
1 CID
0 REV
1
7
7
MDL
CID
REV
0
6
6
CID
CID
REV
13
5
5
CID
CID
REV
12
4
4
CID
CID
REV
11
3
3
CID
CID
REV
10
2
2
CID
CID
REV
9
1
1
CID
CID
REV
8
0
0
Table 9 Checksum packet bit assignments
BYTE BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
300000000
2CV23CV
1CV15CV
0CV
7CV6
22
14
CV
CV
CV
21
13
5
CV
CV
CV
20
12
4
CV
CV
CV
19
11
3
CV
CV
CV
18
10
2
CV
CV
CV
17
9
1
CV
CV
CV
1998 Jun 17 18
16
8
0
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
8.4.7 CONTROL PACKET (ID = 02H)
The control packet defines a number of different control
bits for the PCD5008.
FF: force frame 0 to 7 (Table 11). When set, each of these
bits forces the PCD5008 to decode one of the FLEX
frames 0 to 7 irrespective of the system collapse value (for
details of collapse values see Section 8.6.2). For example,
if the system collapse causes the PCD5008 to decode
frames 0, 32, 64 and 96, setting FF2 causes the PCD5008
to also decode FLEX frame 2. This may be used to
acquire transmitted time information. Value after reset = 0.
SPM: single phase mode (Table 11). When this bit is set,
the PCD5008 decodes only one of the transmitted phases.
When this bit is clear, the PCD5008 decodes all
transmitted phases. This value is determined by the
CAPCODE (Section 8.6). A change to this bit while the
PCD5008 is on does not take effect until the next block 0
of a frame. Value after reset = 0.
PS: phase select (Tables 10 and 11). When the SPM bit is
set, these bits define which phase the PCD5008 shall
decode. This value is determined by the CAPCODE
(Section 8.6). A change to these bits, while the PCD5008
is on, does not take effect until the next block 0 of a frame.
Value after reset = 0.
Table 10 Phase selection (PS bits)
DECODED PHASE (BASED ON
PS
PS
1
0
FLEX DATA RATE)
1600 bits/s 3200 bits/s 6400 bits/s
00AAA
01AAB
10 A C C
11 A C D
SBI: send block information words (BIW) 2 to 4
(Table 11). When this bit is set, BIWs with time and date
information and BIWs received in error are sent to the host,
(Section 8.7.9). Value after reset = 0.
MTC: minute timer clear (Table 11). Setting this bit causes
the 1-minute timer to restart from 0 (Section 8.4.8).
ON: turn on decoder (Table 11). When this bit is set, the
PCD5008 decodes FLEX signals. If this bit is cleared,
signal processing stops. However, to assure proper
operation, the PCD5008 requires that it be set into
asynchronous mode when turned off. To achieve that the
following sequence must be used:
1. Send control packet with ON bit clear (decoder off)
2. Send control packet with ON bit set (decoder on)
3. Send control packet with ON bit clear (decoder off).
Timing between these steps is specified below and is
measured from the positive edge of the last clock of one
packet to the positive edge of the last clock of the next
packet.
• The minimum time between steps 1 and 2 is the greater
of 2 ms or the programmed shut-down time.
The programmed shut-down time is the sum of all of the
times programmed in the used receiver shut-down
settings packets.
• There is no maximum time between steps 1 and 2
• The minimum time between steps 2 and 3 is 2 ms
• The maximum time between steps 2 and 3 is the
programmed warm-up time minus 2 ms.
The programmed warm-up time is the sum of all the
times programmed in the used receiver warm-up
settings packets.
8.4.8 O
PERATING THE 1-MINUTE TIMER
The PCD5008 provides a 1-minute timer which allows the
host to implement a time-of-day function while maintaining
low-power operation. The 1-minute timer is enabled using
the MTE bit in the configuration packet (Section 8.4.4).
When the 1-minute timer is enabled, a status packet is
sent at 1-minute intervals with the MT bit set
(Section 8.4.9). When the MTE bit is clear, the internal
1-minute timer stops counting. When the host sends a
control packet with MTC bit set, the 1-minute timer restarts
from 0. This allows accurate setting of a time-of-day
function.
Table 11 Control packet bit assignments
BYTE BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
300000010
2FF
7FF6
1 0 SPM PS
FF
5
1
FF
PS
4
0
FF
3
FF
2
FF
1
FF
0000
0 0 SBI 0 MTC 0 0 0 ON
1998 Jun 17 19
0
Philips Semiconductors Product specification
FLEX Pager Decoder PCD5008
8.4.9 STATUS PACKET (ID = 7FH)
The status packet contains various types of information
that the host may require and is sent to the host:
• Whenever the PCD5008 is polled and has no other data
to send
• On events for which the PCD5008 is configured to send
the status packet (Sections 8.4.4 and 8.4.7). In this
case, the PCD5008 prompts the host to read a status
packet for the following conditions:
– SMU bit in the status packet and the SME bit in the
configuration packet are set
– MT bit in the status packet and the MTE bit in the
configuration packet are set
– EOF bit in the status packet is set
– LBU bit in the status packet is set
– BOE bit in the status packet is set.
FIV: frame information valid (Table 12). This bit is set,
when a valid frame information word has been received
since becoming synchronous to the system and the
f and c fields contain valid values. If this bit is clear, no
valid frame information words have been received since
the PCD5008 became synchronous to the system. This
value changes from 0 to 1 at the end of block 0 (Fig.17) of
the frame in which the first frame information word was
properly received. It is cleared when the PCD5008 goes
into asynchronous mode (see SM bit below). This bit is
initialized to 0 when the PCD5008 is reset and when the
PCD5008 is turned off by clearing the ON bit in the control
packet.
f: current frame number (Table 12). This value is updated
every frame regardless of whether the PCD5008 needs to
decode the frame. This value changes to its proper value
for a frame at the end of block 0 of the frame. The value of
these bits is not guaranteed when FIV is 0.
c: current system cycle number (Table 12). This value is
updated every frame regardless of whether the PCD5008
needs to decode the frame. This value changes to its
proper value for a frame at the end of block 0 of the frame.
The value of these bits is not guaranteed when FIV is 0.
SM: synchronous mode (Table 12). This bit is set, when
the PCD5008 is synchronous to the system.
The PCD5008 sets this bit when the first synchronization
words are received. It clears this bit when synchronisation
to the FLEX signal is lost. This bit is initialized to 0 when
the PCD5008 is reset and when it is turned off by clearing
the ON bit in the control packet.
SMU: synchronous mode update (Table 12). This bit is set
if the SM bit has been updated in this packet. After the
PCD5008 has been turned on, this bit is set when the first
synchronization words are found (SM changes to 1) or
when the first synchronization search period (meaning the
receiver is active during this time) expires (SM stays 0),
after the PCD5008 is turned on. The latter condition gives
the host the option of assuming the paging device is in
range when it is turned on, and displaying out-of-range
only after the initial search period expires. After the initial
synchronous mode update, the SMU bit is set whenever
the PCD5008 switches from/to synchronous mode. The bit
is cleared when read. Changes in the SM bit due to turning
off the PCD5008 does not set the SMU bit. This bit is
initialized to 0 when the PCD5008 is reset.
LB: low battery (Table 12). Set to the value last read from
the LOBAT pin. The host controls when the LOBAT pin is
read via the receiver control packets. This bit is initialized
to 0 at reset. It is also initialized to the inverse of the
LBP bit in the configuration packet, when the PCD5008 is
turned on, by setting the ON bit in the control packet.
LBU: low battery update (Table 12). This bit is set if the
value on two consecutive reads of the LOBAT pin yielded
different results. The bit is cleared when read. The host
controls when the LOBAT pin is read via the receiver
control packets. Changes in the LB bit due to turning on
the PCD5008 do not cause the LBU bit to be set. This bit
is initialized to 0 when the PCD5008 is reset.
MT: minute time-out (Table 12). Set if one minute has
elapsed. The bit is cleared when read. This bit is initialized
to 0 when the PCD5008 is reset.
EOF: end of frame (Table 12). Set when the PCD5008 is
in all frame mode (AFM) (Section 8.8.3), and the end of
the frame has been reached. The PCD5008 is in the AFM
if the AFM enable counter is non-zero, if any temporary
address enabled (TAE) counter is non-zero (Section 8.8.3)
or if the FAF bit in the AFM packet is set. The bit is cleared
when read and initialized to 0 when the PCD5008 is reset.
BOE: buffer overflow error (Table 12). Set when
information has been lost owing to slow host response
time. When the PCD5008 detects that its SPI transmit
buffer has overflowed, it clears the transmit buffer, turns off
decoding by clearing the ON bit in the control packet, and
sets this bit. The bit is cleared when read. This bit is
initialized to 0 when the PCD5008 is reset.
x: unused bits (Table 12). The value of these bits is not
guaranteed.
1998 Jun 17 20
 Loading...
Loading...