

Philips pcd5003 DATASHEETS
INTEGRATED CIRCUITS
DATA SH EET
PCD5003
Advanced POCSAG Paging
Decoder
Product specification
Supersedes data of 1997 Mar 04
File under Integrated Circuits, IC17
1997 Jun 24
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
CONTENTS
FEATURES
2 APPLICATIONS
3 GENERAL DESCRIPTION
4 ORDERING INFORMATION
5 BLOCK DIAGRAM
6 PINNING
7 FUNCTIONAL DESCRIPTION
7.1 Introduction
7.2 The POCSAG paging code
7.3 Error correction
7.4 Operating states
7.5 ON status
7.6 OFF status
7.7 Reset
7.8 Bit rates
7.9 Oscillator
7.10 Input data processing
7.11 Battery saving
7.12 Synchronization strategy
7.13 Call termination
7.14 Call data output format
7.15 Sync word indication
7.16 Error type indication
7.17 Data transfer
7.18 Receiver and oscillator control
7.19 External receiver control and monitoring
7.20 Battery condition input
7.21 Synthesizer control
7.22 Serial microcontroller interface
7.23 Decoder I2C-bus access
7.24 External interrupt
7.25 Status/Control register
7.26 Pending interrupts
7.27 Out-of-Range Indication
7.28 Real time clock
7.29 Periodic interrupt
7.30 Received call delay
7.31 Alert generation
7.32 Alert cadence register (03H; write)
7.33 Acoustic alert
7.34 Vibrator alert
7.35 LED alert
7.36 Warbled alert
7.37 Direct alert control
7.38 Alert priority
7.39 Cancelling alerts
7.40 Automatic POCSAG alerts
7.41 SRAM access
7.42 RAM write address pointer (06H; read)
7.43 RAM read address pointer (08H; read/write)
7.44 RAM data output register (09H; read)
7.45 EEPROM access
7.46 EEPROM address pointer (07H; read/write)
7.47 EEPROM data I/O register (0AH; read/write)
7.48 EEPROM access limitations
7.49 EEPROM read operation
7.50 EEPROM write operation
7.51 Invalid write address
7.52 Incomplete programming sequence
7.53 Unused EEPROM locations
7.54 Special programmed function allocation
7.55 Synthesizer programming data
7.56 Identifier storage allocation
7.57 Voltage doubler
7.58 Level-shifted interface
7.59 Signal test mode
8 OPERATING INSTRUCTIONS
8.1 Reset conditions
8.2 Power-on reset circuit
8.3 Reset timing
8.4 Initial programming
9 LIMITING VALUES
10 DC CHARACTERISTICS
11 DC CHARACTERISTICS (WITH VOLTAGE
CONVERTER)
12 OSCILLATOR CHARACTERISTICS
13 EEPROM CHARACTERISTICS
14 AC CHARACTERISTICS
15 APPLICATION INFORMATION
16 PACKAGE OUTLINE
17 SOLDERING
17.1 Introduction
17.2 Reflow soldering
17.3 Wave soldering
17.4 Repairing soldered joints
18 DEFINITIONS
19 LIFE SUPPORT APPLICATIONS
20 PURCHASE OF PHILIPS I2C COMPONENTS
1997 Jun 24 2
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
1 FEATURES
• Wide operating supply voltage range: 1.5 to 6.0 V
• EEPROM programming requires only 2.0 V supply
• Low operating current: 50 µA typ. (ON),
25 µA typ. (OFF)
• Temperature range: −25 to +70 °C
•
“CCIR Radio paging Code No. 1”
(POCSAG)
compatible
• 512, 1200 and 2400 bits/s data rates using 76.8 kHz
crystal
• Built-in data filter (16-times oversampling) and bit clock
recovery
• Advanced ACCESS
synchronization algorithm
• 2-bit random and (optional) 4-bit burst error correction
• Up to 6 user addresses (RICs), each with
4 functions/alert cadences
• Up to 6 user address frames, independently
programmable
• Standard POCSAG sync word, plus up to 4 user
programmable sync words
• Received data inversion (optional)
• Call alert via beeper, vibrator or LED
• 2-level acoustic alert using single external transistor
• Alert control: automatic (POCSAG type), via cadence
register or alert input pin
• Separate power control of receiver and RF-oscillator for
battery economy
• Synthesizer set-up and control interface (3-line serial)
• On-chip EEPROM for storage of user addresses (RICs),
pager configuration and synthesizer data
• On-chip SRAM buffer for message data
2
• Slave I
C-bus interface to microcontroller for transfer of
message data, status/control and EEPROM
programming (data transfer at up to 400 kbits/s)
• Wake-up interrupt for microcontroller, programmable
polarity
• Direct and I2C-bus control of operating status (ON/OFF)
• Battery-low indication (external detector)
• Out-of-range condition indication
• Real time clock reference output
• On-chip voltage doubler
• Interfaces directly to UAA2080 and UAA2082 paging
receivers.
2 APPLICATIONS
• Display pagers, basic alert-only pagers
• Information services
• Personal organizers
• Telepoint
• Telemetry/data transmission.
3 GENERAL DESCRIPTION
The PCD5003 is a very low power POCSAG decoder and
pager controller. It supports data rates of 512, 1200 and
2400 bits/s using a single 76.8 kHz crystal. On-chip
EEPROM is programmable using a minimum supply
voltage of 2.0 V, allowing ‘over-the-air’ programming.
2
The PCD5003 is fast I
C-bus compatible
(maximum 400 kbits/s).
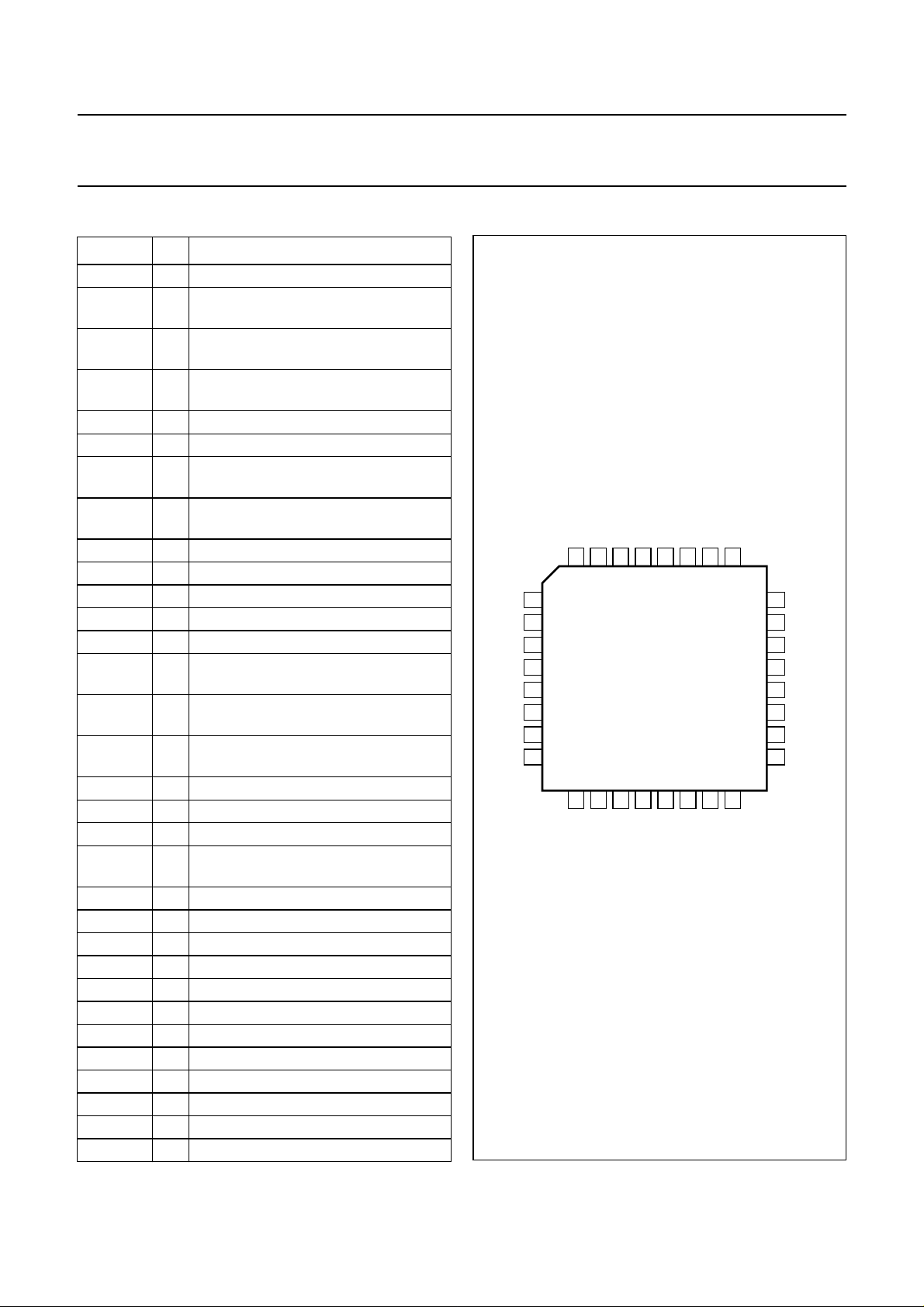
4 ORDERING INFORMATION
TYPE
NUMBER
NAME DESCRIPTION VERSION
PACKAGE
PCD5003H LQFP32 plastic low profile quad flat package; 32 leads; body 7 × 7 × 1.4 mm SOT358-1
PCD5003U/10 − film-frame carrier (naked die) 32 pads −
1997 Jun 24 3
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
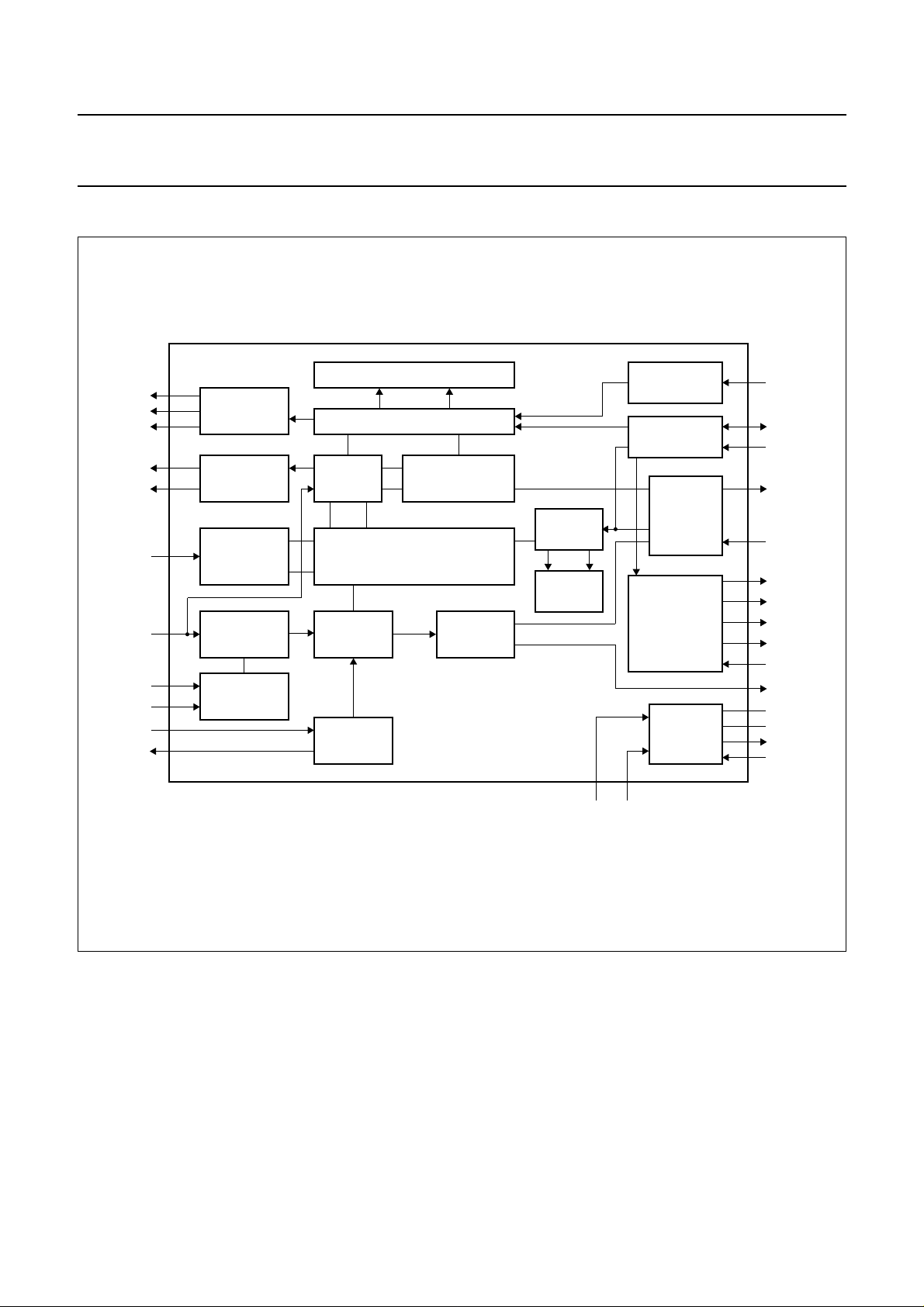
5 BLOCK DIAGRAM
handbook, full pagewidth
10
21
30
31
32
15
14
13
MLC244
7
RST
9
SDA
SCL
5
INT
BAT
VIB
LED
1
ATL
ATH
2
ALC
4
REF
CCN
CCP
V
PO
8
V
PR
ZSD
ZSC
ZLE
RXE
ROE
RDI
DON
TS1
TS2
XTAL1
XTAL2
26
27
SYNTHESIZER
28
24
25
DATA FILTER
23
3
16
20
18
17
CONTROL
RECEIVER
CONTROL
AND
CLOCK
RECOVERY
CLOCK
CONTROL
TEST
CONTROL
EEPROM CONTROL
DECODING
DATA
CONTROL
MAIN DECODER
MASTER
DIVIDER
OSCILLATOR
EEPROM
POCSAG
SYNCHRONIZATION
TIMER
REFERENCE
PCD5003
RAM
CONTROL
RAM
VDDV
RESET
SET-UP
2
I C-BUS
CONTROL
REGISTERS
AND
INTERRUPT
CONTROL
ALERT
GENERATION
AND
CONTROL
VOLTAGE
DOUBLER
AND LEVEL
SHIFTER
12, 2911
SS
Fig.1 Block diagram.
1997 Jun 24 4
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
6 PINNING
SYMBOL PIN DESCRIPTION
ATL 1 alert LOW level output
ALC 2 alert control input
(normally LOW by internal pull-down)
DON 3 direct ON/OFF input
(normally LOW by internal pull-down)
REF 4 real time clock frequency reference
output
INT 5 interrupt output
n.c. 6 not connected
RST 7 reset input
(normally LOW by internal pull-down)
V
PR
SDA 9 I
SCL 10 I
V
DD
V
SS
V
PO
CCP 14 voltage converter shunt capacitor
CCN 15 voltage converter shunt capacitor
TS1 16 test input 1
XTAL2 17 decoder crystal oscillator output
XTAL1 18 decoder crystal oscillator input
n.c. 19 not connected
TS2 20 test input 2
BAT 21 battery sense input
n.c. 22 not connected
RDI 23 received POCSAG data input
RXE 24 receiver circuit enable output
ROE 25 receiver oscillator enable output
ZSD 26 synthesizer serial data output
ZSC 27 synthesizer serial clock output
ZLE 28 synthesizer latch enable output
V
SS
VIB 30 vibrator motor drive output
LED 31 LED drive output
ATH 32 alert HIGH level output
8 external positive voltage reference
input
2
C-bus serial data input/output
2
C-bus serial clock input
11 main positive supply voltage
12 main negative supply voltage
13 voltage converter positive output
(positive side)
(negative side)
(normally LOW by internal pull-down)
(normally LOW by internal pull-down)
29 main negative supply voltage
LED
VIB
31
30
PCD5003H
10
11
DD
SCL
V
SS
ZLE
ZSC
ZSD
27
14
CCP
26
15
CCN
ROE
25
16
TS1
24
23
22
21
20
19
18
17
MLC245
V
29
28
12
13
SS
PO
V
V
ATL
ALC
DON
REF
INT
n.c.
RST
V
PR
ATH
32
1
2
3
4
5
6
7
8
9
SDA
Fig.2 Pin configuration for SOT358-1 (LQFP32).
RXE
RDI
n.c.
BAT
TS2
n.c.
XTAL1
XTAL2
1997 Jun 24 5

Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
7 FUNCTIONAL DESCRIPTION
7.1 Introduction
The PCD5003 is a very low power decoder and pager
controller specifically designed for use in new generation
radio pagers. The architecture of the PCD5003 allows for
flexible application in a wide variety of radio pager designs.
The PCD5003 is fully compatible with
Code No. 1”
at data rates of 512, 1200 and 2400 bits/s using a single
oscillator crystal of 76.8 kHz.
In addition to the standard POCSAG sync word the
PCD5003 is also capable of recognizing up to 4 User
Programmable Sync Words (UPSWs). This permits the
reception of both private services and POCSAG
transmissions via the same radio channel.
Used together with the Philips UAA2080 or UAA2082
paging receiver, the PCD5003 offers a highly
sophisticated, miniature solution for the radio paging
market. Control of an RF synthesizer circuit is also
provided to ease alignment and channel selection.
On-chip EEPROM provides storage for user addresses
(Receiver Identity Codes or RICs) and Special
Programmed Functions (SPFs), which eliminates the need
for external storage devices and interconnection. For other
non-volatile storage 20 bytes of general purpose
EEPROM are available. The low EEPROM programming
voltage makes the PCD5003 well- suited for ‘over-the-air’
programming/reprogramming.
On request from an external controlling device or
automatically (by SPF programming), the PCD5003 will
provide standard POCSAG alert cadences by driving a
standard acoustic ‘beeper’. Non-standard alert cadences
may be generated via a cadence register or a dedicated
control input.
The PCD5003 can also produce a HIGH level acoustic
alert as well as drive an LED indicator and a vibrator motor
via external bipolar transistors.
The PCD5003 contains a low-power, high-efficiency
voltage converter (doubler) designed to provide a higher
voltage supply to LCD drivers or microcontrollers.
In addition, an independent level shifted interface is
provided allowing communication to a microcontroller
operating at a higher voltage than the PCD5003.
Interface to such an external device is provided by an
I2C-bus which allows received call identity and message
data, data for the programming of the internal EEPROM,
alert control and pager status information to be transferred
(also known as the POCSAG code) operating
“CCIR Radio paging
between the devices. Pager status includes features
provided by the PCD5003 such as battery-low and
out-of-range indications. A dedicated interrupt line
minimizes the required microcontroller activity.
A selectable low frequency timing reference is provided for
use in real time clock functions.
Data synchronization is achieved by the Philips patented
ACCESS
made of the POCSAG code structure particularly in fading
radio signal conditions. The algorithm allows for data
synchronization without preamble detection whilst
minimizing battery power consumption.
Random and (optional) burst error correction techniques
are applied to the received data to optimize on call success
rate without increasing falsing rate beyond specified
POCSAG levels.
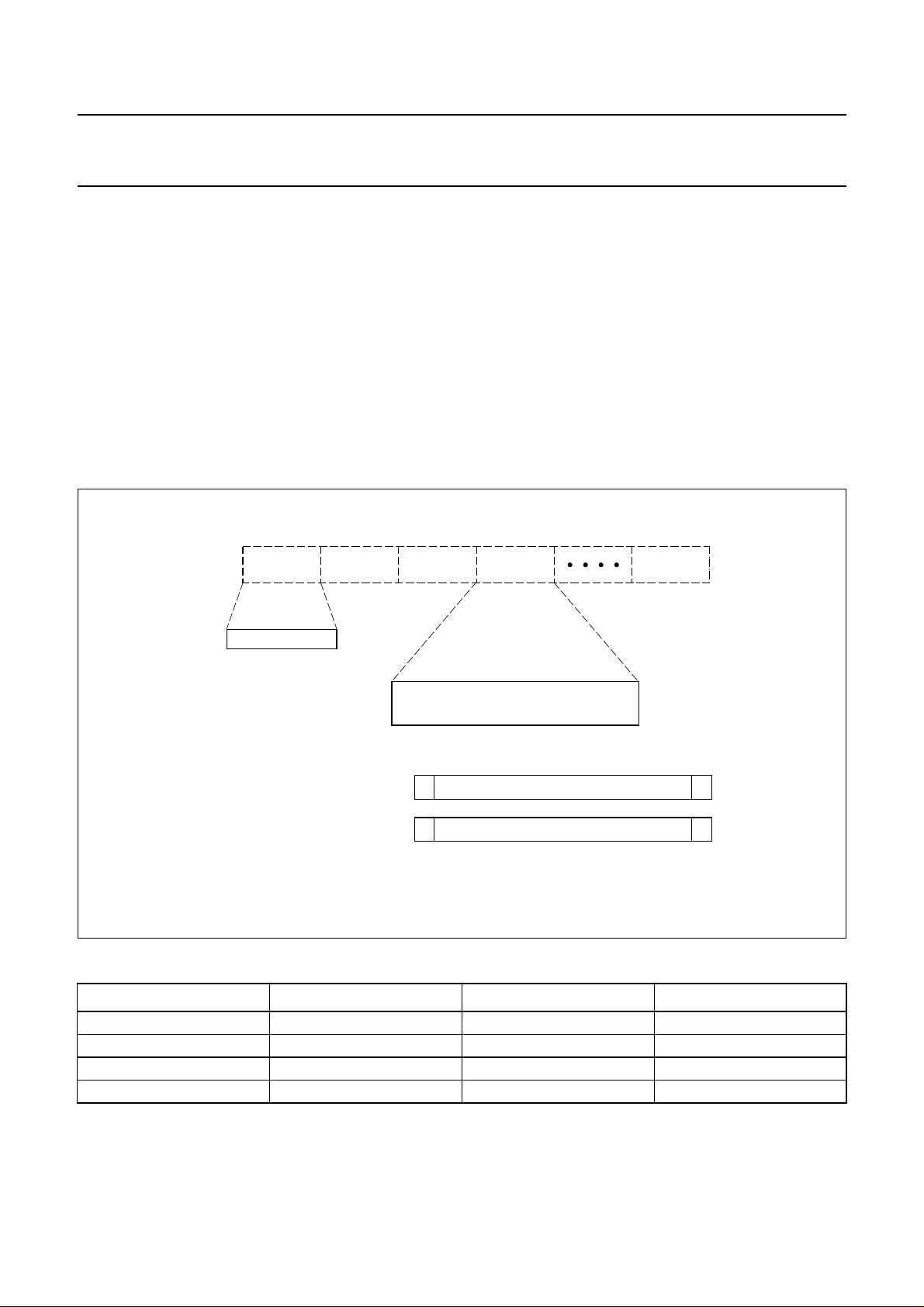
7.2 The POCSAG paging code
A transmission using the
(POCSAG code) is constructed in accordance with the
following rules (see Fig.3).
The transmission is started by sending a preamble,
consisting of at least 576 continuously alternating bits
(10101010...). The preamble is followed by an arbitrary
number of batch blocks. Only complete batches are
transmitted.
Each batch comprises 17 codewords of 32 bits each.
The first codeword is a synchronization codeword with a
fixed pattern. The sync word is followed by 8 frames
(0 to 7)
of 2 codewords each, containing message information.
A codeword in a frame can either be an address, message
or idle codeword.
Idle codewords also have a fixed pattern and are used to
fill empty frames or to separate messages.
Address codewords are identified by an MSB of logic 0
and are coded as shown in Fig.3. A user address or RIC
consists of 21 bits. Only the upper 18 bits are encoded in
the address codeword (bits 2 to 19).
The lower 3 bits designate the frame number (0 to 7) in
which the address is transmitted.
Four different call types (‘numeric’, ‘alphanumeric’ and
two ‘alert only’ types) can be distinguished on each user
address. The call type is determined by two function bits in
the address codeword (bits 20 and 21), as shown in
Table 1.
algorithm ensuring that maximum advantage is
“CCIR Radio paging Code No. 1”
1997 Jun 24 6
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
Alert-only calls only consist of a single address codeword.
Numeric and alphanumeric calls have message
codewords following the address. A message causes the
frame structure to be temporarily suspended. Message
codewords are sent until the message is completed, with
only the sync words being transmitted in their expected
positions.
Message codewords are identified by an MSB of logic 1
and are coded as shown in Fig.3. The message
information is stored in a 20-bit field (bits 2 to 21). The data
format is determined by the call type: 4 bits per digit for
numeric messages and 7 bits per (ASCII) character for
alphanumeric messages.
handbook, full pagewidth
PREAMBLE BATCH 1 BATCH 2 BATCH 3 LAST BATCH
10101 . . . 10101010
Each codeword is protected against transmission errors by
10 CRC check bits (bits 22 to 31) and an even-parity bit
(bit 32). This permits correction of maximum 2 random
errors or up to 3 errors in a burst of 4 bits (a 4-bit burst
error) per codeword.
The POCSAG standard recommends the use of
combinations of data formats and function bits, as given in
Table 1. Other (non-standard) combinations will be
received normally by the PCD5003. Message data is not
deformatted.
SYNC | CW CW | CW CW | . . . . . | CW CW
FRAME 0 FRAME 1 FRAME 7
Address code-word
Message code-word
0 18-bit address 2 function bits 10 CRC bits P
1 20-bit message 10 CRC bits P
Fig.3 POCSAG code structure.
Table 1 POCSAG recommendedcall types and function bits
BIT 20 (MSB) BIT 21 (LSB) CALL TYPE DATA FORMAT
0 0 numeric 4-bits per digit
0 1 alert only 1 −
1 0 alert only 2 −
1 1 alphanumeric 7-bits per ASCII character
MCD456
1997 Jun 24 7
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
7.3 Error correction Table 2 Error correction
ITEM DESCRIPTION
Preamble 4 random errors in 31 bits
Synchronization codeword 2 random errors in 32 bits
Address codeword 2 random errors, plus: 4-bit burst errors (optional)
Message codeword 2 random errors, plus: 4-bit burst errors (optional)
In the PCD5003 error correction methods have been
implemented as shown in Table 2.
Random error correction is default for both address and
message codewords. In addition, burst error correction
can be enabled by SPF programming. Up to 3 erroneous
bits in a 4-bit burst can be corrected.
The error type detected for each codeword is identified in
the message data output to the microcontroller, allowing
rejection of calls with too many errors.
7.4 Operating states
The PCD5003 has 2 operating states:
• ON status
• OFF status.
The operating state is determined by a Direct Control input
(DON) and bit D4 in the control register (see Table 3).
Table 3 Truth table for decoder operating status
DON INPUT
CONTROL BIT
D4
OPERATING
STATUS
0 0 OFF
01ON
10ON
11ON
7.5 ON status
In ON status the decoder pulses the receiver and oscillator
enable outputs (respectively RXE and ROE) according to
the code structure and the synchronization algorithm. Data
received serially at the data input (RDI) is processed for
call receipt. Reception of a valid paging call is signalled to
the microcontroller by means of an interrupt signal.
The received address and message data can then be read
2
via the I
C-bus interface.
7.6 OFF status
In OFF status the decoder will neither activate the receiver
or oscillator enable outputs, nor process any data at the
data input. The crystal oscillator remains active to permit
communication with the microcontroller.
In both operating states an accurate timing reference is
available via the REF output. By SPF programming the
signal periodicity may be selected as 32.768 kHz, 50 Hz,
2 Hz or1⁄60Hz.
7.7 Reset
The decoder can be reset by applying a positive pulse on
input pin RST. A power-on reset circuit consisting of an RC
network can be connected to this input as well. Conditions
during and after a reset are described in Chapter
“Operating instructions”.
For successful reset at power-on, a HIGH level must be
present on the RST pin while the device is powering-up.
This can be applied by the microcontroller, or via a suitable
RC power-on reset circuit connected to the RST input.
Reset circuit details and conditions during and after a reset
are described in Chapter 8
7.8 Bit rates
The PCD5003 can be configured for data rates of 512,
1200 or 2400 bit/s by SPF programming. These data
rates are derived from a single 76.8 kHz oscillator
frequency.
7.9 Oscillator
The oscillator circuit is designed to operate at 76.8 kHz.
Typically, a tuning fork crystal will be used as a frequency
source. Alternatively, an external clock signal can be
applied to pin XTAL1 (amplitude = V
to VSS), but a
DD
slightly higher oscillator current is consumed. A 2.2 MΩ
feedback resistor connected between XTAL1 and XTAL2
is required for proper operation.
1997 Jun 24 8

Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
To allow easy oscillator adjustment (e.g. by means of a
variable capacitor) a 32.768 kHz reference frequency can
be selected at output REF by SPF programming.
7.10 Input data processing
Data input is binary and fully asynchronous. Input bit rates
of 512, 1200 and 2400 bits/s are supported. As a
programmable option, the polarity of the received data can
be inverted before further processing.
The input data is noise filtered by means of a digital filter.
Data is sampled at 16 times the data rate and averaged by
majority decision.
The filtered data is used to synchronize an internal clock
generator by monitoring transitions. The recovered clock
phase can be adjusted in steps of
1
⁄8 or1⁄32bit period per
received bit.
The larger step size is used when bit synchronization has
not been achieved, the smaller when a valid data
sequence has been detected (e.g. preamble or sync
word).
7.11 Battery saving
Current consumption is reduced by switching off internal
decoder sections whenever the receiver is not enabled.
To further increase battery efficiency, reception and
decoding of an address codeword is stopped as soon as
the uncorrected address field differs by more than 3 bits
from the enabled RICs. If the next codeword must be
received again, the receiver is re-enabled thus observing
the programmed establishment times t
RXE
and t
RDE
.
The current consumption of the complete pager can be
minimized by separately activating the RF oscillator circuit
(at output ROE) before activating the rest of the receiver.
This is possible with the UAA2082 receiver which has
external biasing for the oscillator circuit.
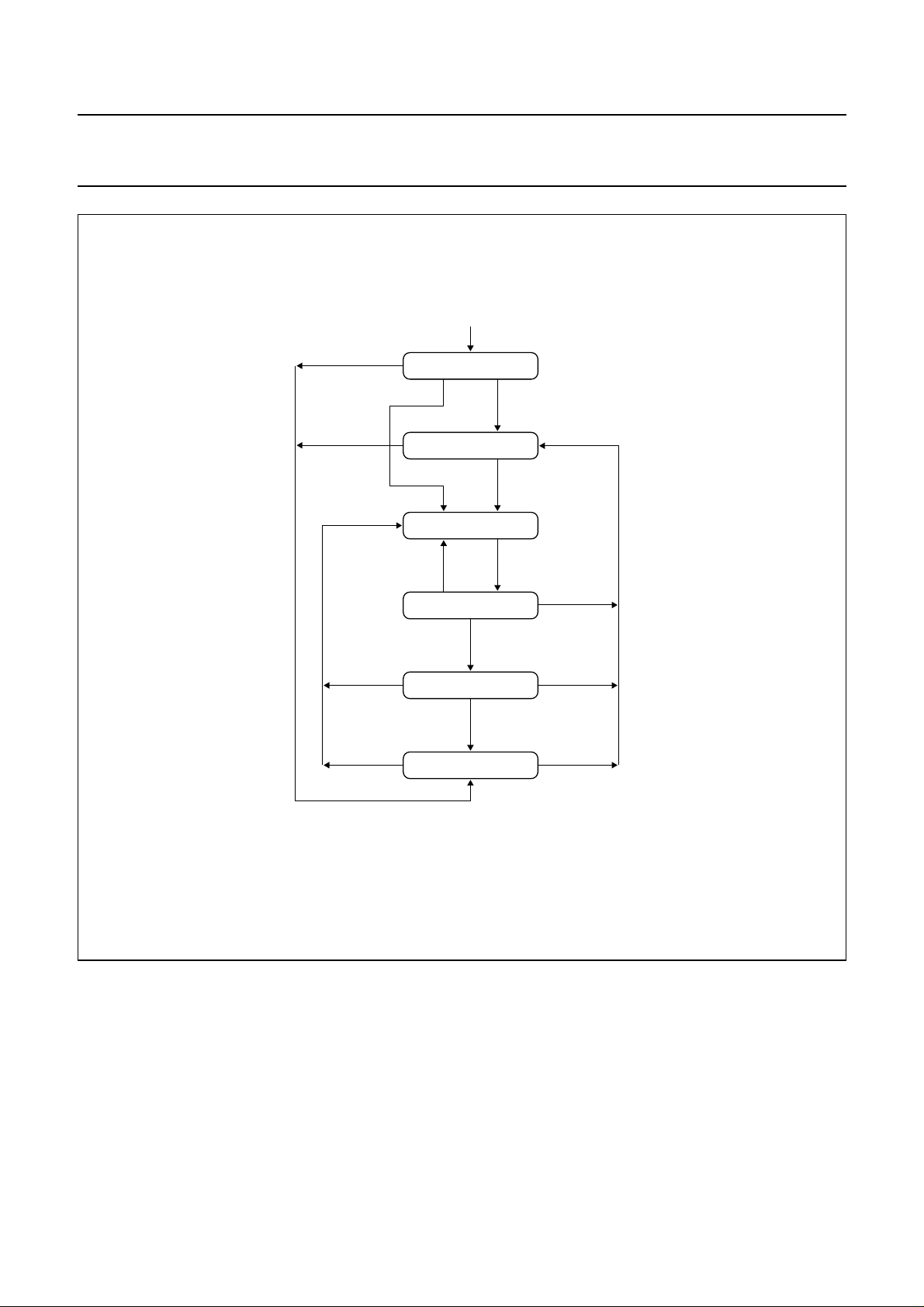
7.12 Synchronization strategy
In ON status the PCD5003 synchronizes to the POCSAG
data stream by means of the Philips ACCESS
algorithm.
A flow diagram is shown in Fig.4. Where ‘sync word’ is
used, this implies both the standard POCSAG sync word
and any enabled User Programmable Sync Word
(UPSW).
Several modes of operation can be distinguished
depending on the synchronization state. Each mode uses
a different method to obtain or retain data synchronization.
The receiver and oscillator enable outputs (respectively
RXE and ROE) are switched accordingly, with the
appropriate establishment times (respectively t
t
).
ROON
RXON
and
Before comparing received data with preamble, an
enabled sync word or programmed user addresses, the
appropriate error correction is applied.
Initially, after switching to ON status, the decoder is in
switch-on mode. Here the receiver will be enabled for a
period up to 3 batches, testing for preamble and sync
word. Failure to detect preamble or sync word will cause
switching to ‘carrier off’ mode.
Detection of preamble switches to preamble receive
mode, in which sync word is looked for. The receiver will
remain enabled while preamble is detected. When neither
sync word nor preamble is found within 1 batch duration
‘carrier off’ mode is entered.
Upon detection of a sync word the data receive mode is
entered. The receiver is activated only during enabled user
address frames and sync word periods. When an enabled
user address has been detected, the receiver will be kept
enabled for message codeword reception until the call
termination criteria are met.
During call reception data bytes are stored in an internal
SRAM buffer, capable of storing 2 batches of message
data.
Messages are transmitted contiguously, only interrupted
by sync words at the beginning of each batch. When a
message extends beyond the end of a batch, no testing for
sync takes place. Instead, a message data transfer will be
initiated by an interrupt to the external controller. Data
reception continues normally after a period corresponding
to the sync word duration.
If any message codeword is found to be uncorrectable,
‘data-fail’ mode is entered and no data transfer will be
attempted at the next sync word position. Instead, a test for
sync word will be carried out.
In the data fail mode message reception continues
normally for 1 batch duration. Upon detection of sync word
at the expected position the decoder returns to
‘data receive’ mode. If sync word again fails to appear,
batch synchronization is deemed lost. Call reception is
then terminated and ‘fade recovery’ mode is entered.
The fade recovery mode is intended to scan for sync word
and preamble over an extended window (nominal
position ±8 bits).
1997 Jun 24 9

Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
This is done for a period of up to 15 batches, allowing
recovery of synchronization from long fades in the radio
signal. Detection of preamble switches to
‘preamble receive’ mode, while sync word detection
switches to ‘data receive’ mode. When neither is found
within a period of 15 batches, the radio signal is
considered lost and ‘carrier off’ mode is entered.
The purpose of carrier off mode is to detect a valid radio
transmission and synchronize to it quickly and efficiently.
Because transmissions may start at random, the decoder
enables the receiver for 1 codeword in every
18 codewords looking for preamble or sync word. By using
a buffer containing 32 bits (n bits from the current scan,
32 − n from the previous scan) effectively every batch bit
position can be tested within a continuous transmission of
at least 18 batches. Detection of preamble switches to
‘preamble receive’ mode, while sync word detection
switches to ‘data receive’ mode.
7.13 Call termination
Call reception is terminated:
• Upon reception of any address codeword (including Idle
codeword) requiring no more than single bit error
correction
• In ‘data fail’ mode, when a sync word is not found at the
expected batch position
• When a forced call termination command is received
from an external controller.
The last method permits an external controller to stop call
reception depending on the number and type of errors
which occurred in a call. After a forced call termination the
decoder will enter ‘data fail’ mode.
The formats of a call header, a message data block and a
call terminator are shown in Tables 4, 6 and 8.
A Call Header contains information on the last sync word
received, the RIC which began call reception and the type
of error correction performed on the address codeword.
A Message Data block contains the data bits from a
message codeword plus the type of error correction
performed. No deformatting is done on the data bits:
numeric data appear as 4-bit groups per digit,
alphanumeric data have a 7-bit ASCII representation.
The Call Terminator contains information on the last sync
word received, information on the way the call was
terminated (forced call termination command, loss of sync
word in ‘data fail’ mode) and the type of error correction
performed on the terminating codeword.
7.15 Sync word indication
The sync word recognized by the PCD5003 is shown in the
call header (bits S3 to S1). The decimal value represents
the identifier number in the EEPROM of the UPSW in
question. A value of 7 indicates the standard POCSAG
sync word.
7.16 Error type indication
Table 10 shows how the different types of detected errors
are encoded in the call data output format.
A message codeword containing more than a single bit
error (bit E3 = 1) may appear as an address codeword
(bit M1 = 0) after error correction. In this event the
codeword is processed as message data and does not
cause call termination.
The type of error correction as well as the call termination
conditions are indicated by status bits in the message data
output.
Following call termination, transfer of the data received
since the previous sync word period is initiated by means
of an interrupt to the external controller.
7.14 Call data output format
POCSAG call information is stored in the decoder SRAM
in blocks of 3 bytes per codeword. Each stored call
consists of a call header, followed by message data blocks
and concluded by a call terminator. In the event of
concatenated messages the call terminator is replaced
with the call header of the next message. An alert-only call
only has a call header and a call terminator.
1997 Jun 24 10
7.17 Data transfer
Data transfer is initiated either during sync word periods or
as soon as the receiver is disabled after call termination.
If the SRAM buffer is full, data transfer is initiated
immediately during the next codeword.
When the PCD5003 is ready to transfer received call data
an external interrupt will be generated via output INT.
Any message data can be read by accessing the RAM
output register via the I
output starting from the position indicated by the RAM read
pointer.
2
C-bus interface. Bytes will be
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
handbook, full pagewidth
no preamble or
sync word
(3 batches)
no preamble or
sync word
(1 batch)
sync word
OFF to ON status
switch-on
preamble receive
data receive
data fail
no preamble or
sync word
(1 batch)
fade recovery
no preamble or
sync word
(15 batches)
carrier off
preamble
sync word
no sync wordsync word
preamble
preamblesync word
preamblesync word
MLC247
Fig.4 ACCESS synchronization algorithm.
1997 Jun 24 11
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
Table 4 Call header format
BYTE NUMBER
1 0 S3 S2 S1 R3 R2 R1 DF
2 0 S3 S2 S1 R3 R2 R1 0
3 X X F0F1E3E2E1 0
Table 5 Call header bit identification
BITS (MSB to LSB) IDENTIFICATION
S3 to S1 identifier number of sync word for current batch (7 = standard POCSAG)
R3 to R1 identifier number of user address (RIC)
DF data fail mode indication (1 = data fail mode); note 1
F0 and F1 function bits of received address codeword (bits 20, 21)
E3 to E1 detected error type; see Table 10; E3 = 0 in a concatenated call header
Note
1. The DF bit in the call header is set:
a) When the sync word of the batch in which the (beginning of the) call was received, did not match the standard
POCSAG or a user-programmed sync word. The sync word identifier (bits S3 to S1) will then be made 0.
b) When any codeword of a previous call received in the same batch was uncorrectable.
Table 6 Message data format
BIT 7
(MSB)
BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1
BIT 0
(LSB)
BYTE NUMBER
1 M2M3M4M5M6M7M8M9
2 M10 M11 M12 M13 M14 M15 M16 M17
3 M18 M19 M20 M21 E3 E2 E1 M1
Table 7 Message data bit identification
BITS (MSB to LSB) IDENTIFICATION
M2 to M21 message codeword data bits
E3 to E1 detected error type; see Table 10
M1 message codeword flag
Table 8 Call terminator format
BYTE NUMBER
1 FTS3S2S1 0 0 0 DF
2 FTS3S2S1 0 0 0 X
3 XXXXE3E2E10
BIT 7
(MSB)
BIT 7
(MSB)
BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1
BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1
BIT 0
(LSB)
BIT 0
(LSB)
1997 Jun 24 12
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
Table 9 Call terminator bit identification
BITS (MSB to LSB) IDENTIFICATION
FT forced call termination (1 = yes)
S3 to S1 identifier number of last sync word
DF data fail mode indication (1 = data fail mode); note 1
E3 to E1 detected error type; see Table 10; E3 = 0 in a call terminator
Note
1. The DF bit in the call terminator is set:
a) When any call data codeword in the terminating batch was uncorrectable, while in ‘data receive’ mode.
b) When the sync word at the start of the terminating batch did not match the standard POCSAG or a
user-programmed sync word, while in ‘data fail’ mode.
Table 10 Error type identification (note 1)
E3 E2 E1
0 0 0 no errors - correct codeword 0
0 0 1 parity bit in error 1
0 1 0 single bit error 1 + parity
0 1 1 single bit error and parity error 1
1 0 0 not used
1 0 1 4-bit burst error and parity error 3 (e.g.1101)
1 1 0 2-bit random error 2
1 1 1 uncorrectable codeword 3 or more
Note
1. POCSAG code allows a maximum of 3 bit errors to be detected per codeword.
Successful call termination occurs by reception of a valid
address codeword with less than 2 bit errors.
Unsuccessful termination occurs when sync word is not
detected while in ‘data fail’ mode.
It is generally possible to distinguish these two conditions
using the sync word identifier number (bits S3 to S1); the
identifier number will be non-zero for correct termination,
and zero for sync word failure.
Only when a call is received in ‘data fail’ mode and the call
is terminated before the end of the batch, is it not possible
to distinguish unsuccessful from correct termination.
Reception of message data can be terminated at any time
by transmitting a forced call termination command to the
control register via the I2C-bus. Any call received will then
be terminated immediately and ‘data fail’ mode will be
entered.
ERROR TYPE
7.18 Receiver and oscillator control
A paging receiver and an RF oscillator circuit can be
controlled independently via enable outputs RXE and ROE
respectively. Their operating periods are optimized
according to the synchronization mode of the decoder.
Each enable signal has its own programmable
establishment time (see Table 11).
7.19 External receiver control and monitoring
An external controller may enable the receiver control
outputs continuously via an I
the normal enable pattern. Data reception continues
normally. This mode can be left by means of a reset or an
I2C-bus command.
External monitoring of the receiver control output RXE is
possible via bit D6 in the status register, when enabled via
the control register (D2 = 1). Each change of state of
output RXE will generate an external interrupt at
output INT.
NUMBER OF ERRORS
2
C-bus command, overruling
1997 Jun 24 13
Philips Semiconductors Product specification
Advanced POCSAG Paging Decoder PCD5003
7.20 Battery condition input
A logic signal from an external sense circuit signalling
battery condition can be applied to the BAT input. This
input is sampled each time the receiver is disabled
(RXE ↓ 0).
When enabled via the control register (D2 = 0), the
condition of input BAT is reflected in bit D6 of the status
register. Each change of state of bit D6 causes an external
interrupt at output INT.
When using the UAA2080 pager receiver a battery-low
condition corresponds to a logic HIGH-level. With a
different sense circuit the reverse polarity can be used as
well, because every change of state is signalled to an
external controller.
After a reset the initial condition of the battery-low indicator
in the status register is zero.
Table 11 Receiver and oscillator establishment times
(note 1)
CONTROL
OUTPUT
ESTABLISHMENT TIME UNIT
RXE 5 10 15 30 ms
ROE 20 30 40 50 ms
Note
1. The exact values may differ slightly from the above
values, depending on the bit rate (see Table 22).
7.21 Synthesizer control
Control of an external frequency synthesizer is possible
via a dedicated 3-line serial interface (outputs ZSD, ZSC
and ZLE). This interface is common to a number of
available synthesizers. The synthesizer is enabled using
the oscillator enable output ROE.
The frequency parameters must be programmed in
EEPROM. Two blocks of maximum 24 bits each can be
stored. Any unused bits must be programmed at the
beginning of a block: only the last bits are used by the
synthesizer.
When the function is selected by SPF programming
(SPF byte 01, bit D6), data is transferred to the
synthesizer each time the PCD5003 is switched from OFF
to ON status. Transfer takes place serially in two blocks,
starting with bit 0 (MSB) of block 1 (see Table 25).
Data bits on ZSD change on the falling flanks of ZSC. After
clocking all bits into the synthesizer, a latch enable pulse
copies the data to the internal divider registers. A timing
diagram is given in Fig.5.
The data output timing is synchronous, but has a pause in
the bit stream of each block. This pause occurs in the
13th bit while ZSC is LOW. The nominal pause duration t
depends on the programmed bit rate for data reception
and is shown in Table 12. The total duration of the 13th bit
is given by t
ZCL+tp
.
A similar pause occurs between the first and the second
data block. The delay between the first latch enable pulse
and the second data block is given by t
ZDL2+tp
.
The complete start-up timing of the synthesizer interface is
given in Fig.12.
Table 12 Synthesizer programming pause
BIT RATE (bit/s) tp (clocks) tp (µs)
512 119 1549
1200 33 430
2400 1 13
7.22 Serial microcontroller interface
The PCD5003 has an I
2
C-bus serial microcontroller
interface capable of operating at 400 kbits/s.
The PCD5003 is a slave transceiver with a 7-bit I2C-bus
address 39 (bits A6 to A0 = 0100111). Together with the
R/W bit the first byte of an I2C-bus message then becomes
4EH (write) or 4FH (read).
Data transmission requires 2 lines: SDA (data) and SCL
(clock), each with an external pull-up resistor. The clock
signal (SCL) for any data transmission must be generated
by the external controlling device.
A transmission is initiated by a start condition
(S: SCL = 1, SDA = ↓) and terminated by a stop condition
(P: SCL = 1, SDA = ↑).
Data bits must be stable when SCL is HIGH. If there are
multiple transmissions, the stop condition can be replaced
with a new start condition.
Data is transferred on a byte basis, starting with a device
address and a read/write indicator. Each transmitted byte
must be followed by an acknowledge bit ACK
(active LOW). If a receiving device is not ready to accept
the next complete byte, it can force a bus wait state by
holding SCL LOW.
The general I2C-bus transmission format is shown in Fig.6.
Formats for master/slave communication are shown in
Fig.7.
p
1997 Jun 24 14
 Loading...
Loading...