


Absolute encoders ENA42HD-S***-CANopen
Technical data
General specifications
Detection type magnetic sampling
Device type Absolute encoders
Linearity error ≤ ± 0.1 °
Functional safety related parameters
MTTFd 480 a at 40 °C
Model Number
ENA42HD-S***-CANopen
Features
•Solid shaft
• Up to 31 bit overall resolution
• CANopen interface
• Free of wear magnetic sampling
• High resolution and accuracy
•Highly shock / vibration and
soiling resistant
• Sturdy construction
• Increased shaft load capacity
• Stainless steel housing
•IP69K
Description
The ENA42HD series are high precision encoders
with internal magnetic sampling.
This multiturn absolute encoder transmits a position
value corresponding to the shaft setting via its
interface.
The control module sends a start sequence to the
absolute encoder to obtain the position data. The
rotary encoder then sends the position data
synchronous to the cycles of the control module. It
is possible to select the counting direction with the
function input.
Mission Time (T
L10 10 E+8 revolutions
Diagnostic Coverage (DC) 0 %
Electrical specifications
Operating voltage U
Power consumption P
Time delay before availability t
Output code binary code
Code course (counting
Interface
Interface type CANopen
Resolution
Single
Multiturn up to 15 Bit
Overall resolution up to 31 Bit
Transfer rate min. 20 kBit/s , max. 1 MBit/s
Cycle time ≥ 1 ms
Standard conformity DSP 406
Connection
Connector M12 connector, 5 pin
Cable Ø6 mm, 4 x 2 x 0.14 mm
Standard conformity
Degree of protection DIN EN 60529 , IP66 / IP68 / IP69K
Climatic testing DIN EN 60068-2-3, no moisture condensation
Emitted interference EN 61000-6-4:2007
Noise immunity EN 61000-6-2:2005
Shock resistance DIN EN 60068-2-27, 300 g, 6 ms
Vibration resistance DIN EN 60068-2-6, 30 g, 10 ... 1000 Hz
Ambient conditions
Operating temperature -40 ... 85 °C (-40 ... 185 °F)
Storage temperature -40 ... 85 °C (-40 ... 185 °F)
Relative humidity 98 % , no moisture condensation
Mechanical specifications
Material
Housing
Flange stainless steel 1.4404 / AISI 316L
Shaft Stainless steel 1.4412 / AISI 440B
Mass approx. 350 g
Rotational speed max. 6000 min
Moment of inertia 30 gcm
Starting torque < 5 Ncm
Shaft load
Axial 270
Radial 270 N
) 20 a
M
B
0
v
direction) ad
turn up to 16 Bit
9 ... 30 V DC (with galvanic isolation)
≤ 1 W
< 250 ms
justable
stainless steel 1.4404 / AISI 316L
2
N
2
-1
Release date: 2018-07-27 09:21 Date of issue: 2018-07-27 t182481_eng.xml
Refer to “General Notes Relating to Pepperl+Fuchs Product Information”.
1
Absolute encoders ENA42HD-S***-CANopen
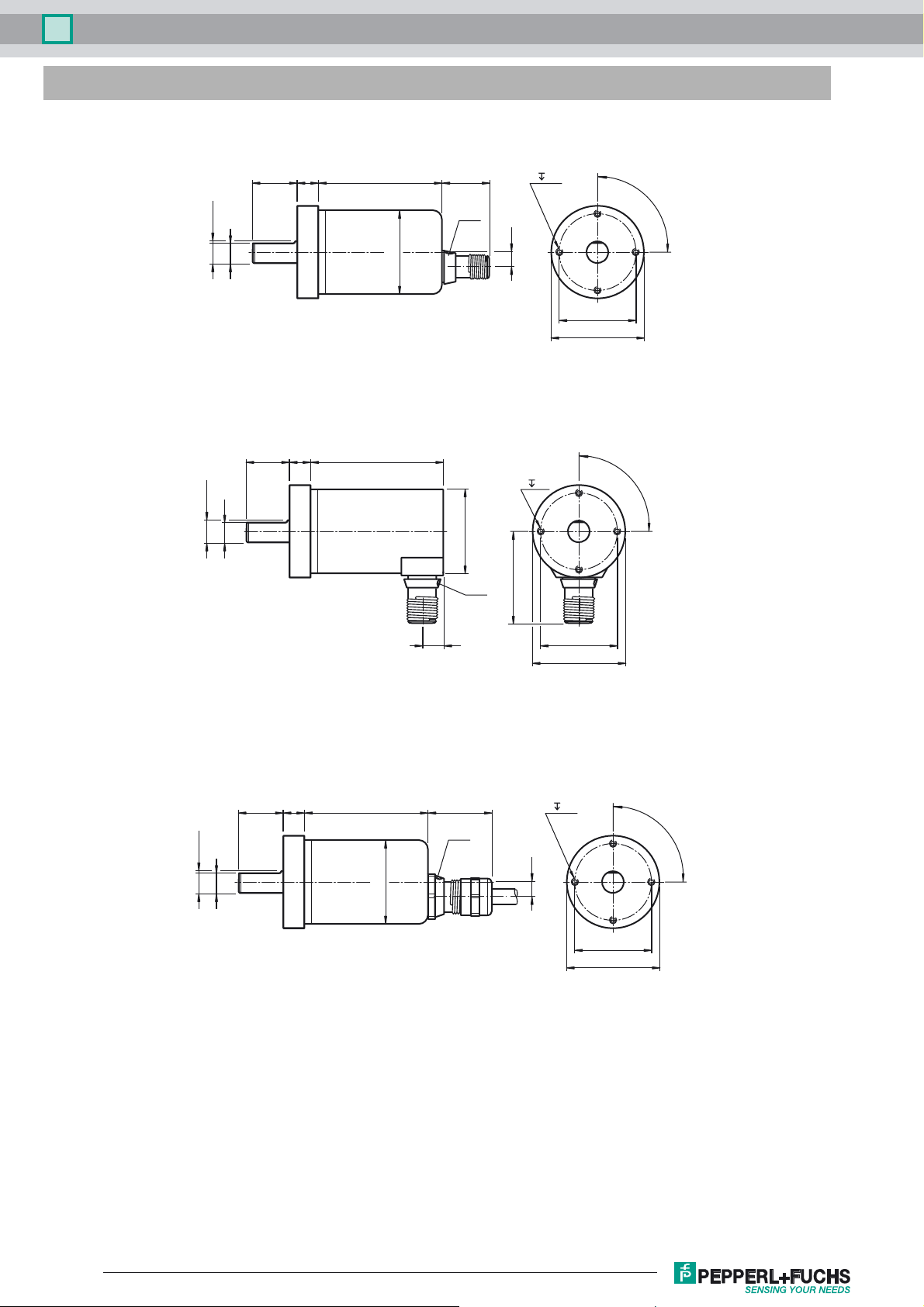
Dimensions
ø10h7
ø10h7
20 9.5 55.4 23
9
20 9.5 59.5
ø9
ø38.2
LED
ø38.2
LED
6.5
43
4 x M4
8
4 x M4
8
4 x 90°
ø35
ø42f7
4 x 90°
ø10h7
9
10
20 9.5 55.4 ~ 30
LED
ø38.2
6.5
4 x M4
8
ø35
ø42f7
4 x 90°
ø35
ø42f7
Release date: 2018-07-27 09:21 Date of issue: 2018-07-27 t182481_eng.xml
Refer to “General Notes Relating to Pepperl+Fuchs Product Information”.
2

Absolute encoders ENA42HD-S***-CANopen
20 9.5 59.5
9
ø10h7
ø38.2
10
Electrical connection
Signal Wire end 5-pin, M12 x 1 connector
CAN GND green 1
+V
S
GND yellow 3
CAN-High white 4
CAN-Low brown 5
Shielding Shielding Housing
Pinout
red 2
1
2
3
5
4
LED
4 x M4
8
49.75
4 x 90°
ø35
ø42f7
Release date: 2018-07-27 09:21 Date of issue: 2018-07-27 t182481_eng.xml
Refer to “General Notes Relating to Pepperl+Fuchs Product Information”.
3

Absolute encoders ENA42HD-S***-CANopen
Indicating elements
LED-indicator with dual color LED
CAN Run (green) Stat e Description
Blinking Pre-Operational Boot up message is sent, device configuration is possible, device is in CAN state
„Pre-Operational“
Single flash Stopped The Encoder is in CAN state „Stopped“
On Operational The encoder is in CAN state „Operational“
Off No power supply
Err (red) Sta te Description
Off No error The Encoder is in operating mode
Flickering AutoBitrate Auto baud mode is active and the encoder tries to find within the time out period a
Single flash Warning limit reached At least one of the error counters of the CAN controller has reached or exceeded the
Double flash Error control event A guard event (NTM slave or NTM master) or a heartbeat event has occured
On Bus off The CAN controller is in stae bus off. No communication possible anymore. Too
valid CAN message for baud rate measurement
warning level (too many error frames)
many error frames in the network.
Release date: 2018-07-27 09:21 Date of issue: 2018-07-27 t182481_eng.xml
Refer to “General Notes Relating to Pepperl+Fuchs Product Information”.
4

Absolute encoders ENA42HD-S***-CANopen
Programmable CAN operating modes
Mode Explanation
The connected host requests the current actual position value via a remote transmission request telegram. The absolute
Polled mode
Cyclic mode
Sync mode
Programmable rotary encoder parameters
Parameter Explanation
Operating parameter
Resolution per revolution
Preset value
Min. and max. limit switch
Cam
encoder reads in the current position, calculates all parameters that have been set and sends back the process actual
value through the same CAN identifier.
The absolute encoder sends the current actual process value cyclically, without being prompted by the host. The cycle
time can be programmed in milliseconds for values between 1 ms and 65536 ms.
After the sync telegram has been received by the host, the absolute encoder sends the current actual process value. If
multiple nodes should respond to the sync telegram, the individual nodes report one after the other according to their
CAN identifier. There is no programming of an offset time. The sync counter can be programmed so that the rotary
encoder does not transmit until after a defined number of sync telegrams.
The direction of rotation (complement) can be specified by parameter as the operating parameter. This
parameter determines the direction of rotation in which the output code will ascend or descend.
The "Resolution" parameter is used to program the rotary encoder so that a desired number of steps can be
implemented in reference to one revolution.
The preset value is the desired position value that must be achieved for a specific physical setting of the axis.
The preset value parameter is used to set the actual position value to the desired actual process value.
A total of two positions can be programmed. The absolute encoder sets one bit to high state in the 32 Bit actual
process value if a value falls outside the range between these two positions.
8 freely programmable cams can be set within the overall resolution. This produces the functionality of a
mechanical cam shifting mechanism.
Release date: 2018-07-27 09:21 Date of issue: 2018-07-27 t182481_eng.xml
Refer to “General Notes Relating to Pepperl+Fuchs Product Information”.
5

Absolute encoders ENA42HD-S***-CANopen
Model number
ENA4 2HD- S10S4 9 - B16 -
Connection type
C1 Cable, 1 m
C2 Cable, 2 m
C5 Cable, 5 m
CA Cable, 10 m
BD M12 device plug, 5-pin
Connection alignment
A axial
R radial
Electical interface
= 9 ... 30 V
B
Ver si on
HD Heavy Duty Line
Size
42 Housing diameter: 42 mm
Device type
ENA Absolute rotary encoder
Shaft diameter
10 10 x 20 mm
Shaft type
S Solid shaft
Multiturn resolution
00 Singleturn rotary encoder
12 Multiturn rotary encoder, 12 bit
14 Multiturn rotary encoder, 14 bit
15 Multiturn rotary encoder, 15 bit
Degree of protection
9 IP66/IP68/IP69K
Flange
S4 Servo flange V4A
CANopen, U
B16
Singleturn resolution
13 13 bit
16 16 bit
Release date: 2018-07-27 09:21 Date of issue: 2018-07-27 t182481_eng.xml
Refer to “General Notes Relating to Pepperl+Fuchs Product Information”.
6
 Loading...
Loading...