

Page 1

SPARC/CPU−56T
Reference Guide
P/N 224548 Revision AA
November 2004
Page 2

Copyright
The information in this publication is subject to change without notice. Force Computers, GmbH reserves the right to make
changes without notice to this, or any of its products, to improve reliability, performance, or design.
Force Computers, GmbH shall not be liable for technical or editorial errors or omissions contained herein, nor for indirect,
special, incidental, or consequential damages resulting from the furnishing, performance, or use of this material. This
information is provided "as is" and Force Computers, GmbH expressly disclaims any and all warranties, express, implied,
statutory, or otherwise, including without limitation, any express, statutory, or implied warranty of merchantability, fitness for a
particular purpose, or non−infringement.
This publication contains information protected by copyright. This publication shall not be reproduced, transmitted, or stored
in a retrieval system, nor its contents used for any purpose, without the prior written consent of Force Computers, GmbH.
Force Computers, GmbH assumes no responsibility for the use of any circuitry other than circuitry that is part of a product of
Force Computers, GmbH. Force Computers, GmbH does not convey to the purchaser of the product described herein any
license under the patent rights of Force Computers, GmbH nor the rights of others.
CopyrightE 2004 by Force Computers, GmbH. All rights reserved.
The Force logo is a trademark of Force Computers, GmbH.a
IEEER is a registered trademark of the Institute for Electrical and Electronics Engineers, Inc.a
PICMGR, CompactPCIR, and the CompactPCI logo are registered trademarks and the PICMG logo is a trademark of the PCI
Industrial Computer Manufacturer’s Group.
AdvancedTCA and ATCA are trademarks of the PCI Computer Manufacturer’s Group.
MS−DOSR, Windows95R, Windows98R, Windows2000R, Windows NTR, Windows Server 2003R and Windows XPR are
registered trademarks and the logos are a trademark of the Microsoft Corporation.
IntelR and PentiumR are registered trademarks and the Intel logo is a trademark of the Intel Corporation.
SPARCR is a registerd trademark, the SPARC logo is a trademark and Ultra SPARCR is a registered trademark of SPARC
International, Inc.
PowerPCR is a registered trademark and the PowerPC logo is a trademark of International Business Machines Corporation.
AltiVecR is a registered trademark and the AltiVec logo is a trademark of Motorola, Inc.
TM
Solaris
Linux Kernel is a free system kernel developed under the GNU General Public License.
GoAheadR is a registered trademark of GoAhead Software, Inc. and SelfReliant
GoAhead Software, Inc.
LynxOSR and BlueCatR are registered trademarks of LynuxWorks, Inc.
TornadoR, VxWorksR, WindR, WindNavigatorR, Wind River SystemsR, Wind River SystemsR and design, WindViewR,
WinRouterR and XmathR are registered trademarks or service marks of Wind River Systems. Inc.
Envoy
SonyR is a registered trademark of Sony Corporation, Japan.
Ethernet
Service Availability
PowerQUICC
Other product names mentioned herein may be trademarks and/or registered trademarks of their respective companies.
a is a trademark of SUN Microsystems, Inc.
TM
, the Tornado logo, Wind RiverTM, and Zinc
TM
a is a trademark of Xerox Corporation.
TM
is a trademark of the Service Availability Forum.
TM
is a trademark of Motorola, Inc.
a
a
a
TM
a and Self AvailabilityTMa are trademarks of
TM
a are trademarks or service marks of Wind River Systems, Inc.
a
a
2 SPARC/CPU−56T
Page 3
World Wide Web: www.fci.com
24−hour access to on−line manuals, driver updates, and application
notes is provided via SMART, our SolutionsPLUS customer support
program that provides current technical and services information.
Headquarters
The Americas Europe Asia
Force Computers Inc.
4211 Starboard Drive
Fremont CA 94538
Tel.: +1 (510) 624−5300
Fax: +1 (510) 624−5301
Email: support@fci.com
224548 420 000 AA
SPARC/CPU−56T 3
Force Computers GmbH
Lilienthalstr. 15
D−85579 Neubiberg/München
Tel.: +49 (89) 608 14−0
Fax: +49 (89) 609 77 93
Email: support−de@fci.com
Force Computers Japan K.K.
Shibadaimon MF Bldg. 4F
Shiba Daimon 2−1−16
Minato−ku, Tokyo 105−0012
Tel.: +81 (03) 3437 3948
Fax: +81 (03) 3437 3968
Email: support−de@fci.com
Page 4

4 SPARC/CPU−56T
Page 5

Contents
Using this Guide
Other Sources of Information
Safety Notes
Sicherheitshinweise
1 Introduction
Features 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Standard Compliances 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ordering Information 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Nomenclature 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Order Numbers 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Installation
Action Plan 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Requirements 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Environmental Requirements 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power Requirements 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hardware Accessories 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IOBPs for CPU and I/O Board 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PMC Modules 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installation Procedure 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memory Modules 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hard Disk 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI−U160 Cable 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 5
Page 6

RS−422 Cable 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PS/2 Splitter Cable 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Switch Settings 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Board Installation 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Backplane Configuration 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installing the CPU Board 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Removing the CPU Board 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Powering Up 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PLCC PROM and Flash Memory Device 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installing Solaris 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Solaris Driver Package 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCgei 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCvme 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCflash 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCctrl 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCplatmod 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Controls, Indicators, and Connectors
Front Panel 57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LEDs 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Key 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connectors 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Serial I/O 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keyboard/Mouse 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
On−Board Connectors 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PMC 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memory Module 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IDE 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VME 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CPU Board 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/O Board 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 SPARC/CPU−56T
Page 7

4 Devices’ Features and Data Paths
Block Diagram 73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UltraSPARC IIi+ Processor 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interrupt Controller 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI Bus A 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Controller 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI Controller 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SENTINEL64 PCI−to−PCI Bridge 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI−to−VME Bridge 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI Bus B 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Controller 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Southbridge 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCIO−2 Controller 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EBus Interface 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Media Independent Interface 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
USB Interfaces 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EBus 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FPGA 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Watchdog 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Temperature Sensor Control 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Local I2C Interface 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Interface 1/3 Switching 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LED and Switch Control 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reset Control 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PLCC PROM and Flash Memory Device 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Real−Time Clock and NVRAM 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Serial Controller 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI Bus C 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 OpenBoot Firmware
Introduction 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CORE 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 7
Page 8

CORE Workflow 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CORE Commands 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
POST 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OpenBoot 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Optional Boot Parameters 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Boot Devices 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OBDIAG 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Executing OBDIAG 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Terminating OBDIAG 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OBDIAG Commands 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VxWorks Support 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
NVRAM Boot Parameters 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagnostics 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI Bus 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
All SCSI Buses 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Single Device 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Group of Devices 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Clock 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Network 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IDE Devices 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Displaying System Information 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Address and Host ID 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ID PROM 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resetting the System 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Activating OpenBoot Help 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Maps and Registers
Interrupt Map 108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Physical Memory Map 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UltraSPARC−IIi+ Physical Address Memory Map 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memory Address Map 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 SPARC/CPU−56T
Page 9

UltraSPARC−IIi+ Internal CSR Space 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI Bus Address Map 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCIO−2 Address Map 112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
System Configuration Registers 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Overview of System Configuration Registers 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Miscellaneous Control Register 115. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
User LED Control Registers 117. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LED Control Register 1 117. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LED Control Register 2 118. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LED Control Register 3 118. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LED Control Register 4 119. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
External Failure Status Register 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Watchdog Timer Registers 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Watchdog Timer Control Register 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Watchdog Timer Trigger Register 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Watchdog Timer Status Register 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer Registers 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer Control Register 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer Clear Control Register 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer Status Register 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer Initial Control Registers 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer Counter Status Register 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interrupt Registers 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interrupt Enable Control Register 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interrupt Pending Status Register 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reset Register 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Board Status Registers 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Switch 1 and 2 Status Register 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Switch 3 and 4 Status Register 131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Board Configuration Status Register 1 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Board Configuration Status Register 2 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hardware Revision Register 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I2C Registers 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AppendixA Troubleshooting
AppendixB Battery Exchange
Index
SPARC/CPU−56T 9
Page 10

Product Error Report
10 SPARC/CPU−56T
Page 11

Tables
Introduction
Tablei1aaaaaaaStandard Compliances 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei2aaaaaaaProduct Nomenclature 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei3aaaaaaaBoard Ordering Information 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei4aaaaaaaBoard Accessories Ordering Information 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installation
Tablei5aaaaaaaEnvironmental Requirements 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei6aaaaaaaPower Requirements 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei7aaaaaaaSwitch Settings 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei8aaaaaaaSolaris Patches 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei9aaaaaaaDevices and Their Appropriate Drivers 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei10aaaaaaFlash Segmentation and Write Protection 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controls, Indicators, and Connectors
Tablei11aaaaaaDescription of Front Panel LEDs 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Devices’ Features and Data Paths
Tablei12aaaaaaReset Sources 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OpenBoot Firmware
Tablei13aaaaaaBoot Parameters 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei14aaaaaaOpenBoot Aliases for SCSI Devices 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei15aaaaaaOpenBoot Aliases for Miscellaneous Devices 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei16aaaaaaOBDIAG Commands 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei17aaaaaaOpenBoot Configuration Parameters 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei18aaaaaaDiagnostic Routines 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei19aaaaaaCommands to Display System Information 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Maps and Registers
Tablei20aaaaaaUltraSPARC−IIi+ Main Address Map 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei21aaaaaaMain Memory Address Map 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei22aaaaaaUltraSPARC−IIi+ Internal CSR Space 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei23aaaaaaPCI Bus Address Map 112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei24aaaaaaPCIO−2 Address Map 112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei25aaaaaaCPU Board System Configuration Register Address Map 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei26aaaaaaMiscellaneous Control Register 116. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei27aaaaaaLED Control Register 1 117. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei28aaaaaaLED Control Register 2 118. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 11
Page 12

Tablei29aaaaaaLED Control Register 3 119. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei30aaaaaaLED Control Register 4 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei31aaaaaaExternal Failure Register 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei32aaaaaaWatchdog Timer Control Register 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei33aaaaaaWatchdog Timer Trigger Register 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei34aaaaaaWatchdog Timer Status Register 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei35aaaaaaTimer Control Register 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei36aaaaaaTimer Clear Control Register 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei37aaaaaaTimer Status Register 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei38aaaaaaTimer Initial Control Registers 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei39aaaaaaTimer Counter Status Register 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei40aaaaaaInterrupt Enable Control Register 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei41aaaaaaInterrupt Pending Status Register 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei42aaaaaaReset Status Register 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei43aaaaaaSwitch 1 and 2 StatusRegister 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei44aaaaaaSwitch 3 and 4 Status Register 131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei45aaaaaaBoard Configuration Status Register 1 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei46aaaaaaBoard Configuration Status Register 2 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei47aaaaaaHardware Revision Register 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei48aaaaaaI2C 1 Register 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tablei49aaaaaaI2C 2 Register 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12 SPARC/CPU−56T
Page 13

Figures
Introduction
Figurei1aaaaaaaFunction Blocks 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installation
Figurei2aaaaaaaLocation of PMC Voltage Keys 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei3aaaaaaaLocation of Switches on Board’s Top Side 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controls, Indicators, and Connectors
Figurei4aaaaaaaCPU Board’s Front Panel 57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei5aaaaaaaSerial A Connector Pinout 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei6aaaaaaaSerial B Connector Pinout 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei7aaaaaaaSUN−Type Keyboard/Mouse Connector Pinout 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei8aaaaaaaPS/2 Keyboard Connector Pinout 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei9aaaaaaaPS/2 Mouse Connector Pinout 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei10aaaaaaEthernet 1 Connector Pinout 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei11aaaaaaEthernet 2 Connector Pinout 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei12aaaaaaSCSI 1/2 Connector Pinouts 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei13aaaaaaLocation of PMC Connectors 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei14aaaaaaPMC I/O Connector Pn24 Pinout 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei15aaaaaaLocation of Memory Module Connectors 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei16aaaaaaIDE Connector Pinout 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei17aaaaaaLocation of VME Connectors 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei18aaaaaaCPU Board P2 VMEbus Connector Pinout Rows Z − B67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei19aaaaaaCPU Board P2 VMEbus Connector Pinout Rows C + D 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei20aaaaaaI/O Board P2 VMEbus Connector Pinout Rows Z – B 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei21aaaaaaI/O Board P2 VMEbus Connector Pinout Rows C + D 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Devices’ Features and Data Paths
Figurei22aaaaaaCPU Board Block Diagram 73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei23aaaaaaI/O Board Block Diagram 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OpenBoot Firmware
Figurei24aaaaaaOpenBoot CORE Overview 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei25aaaaaa48−bit (6−byte) Ethernet Address 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figurei26aaaaaa32−bit (4−byte) Host ID 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 13
Page 14
Using this Guide
No danger encountered. Pay attention to important
This Reference Guide is intended for users qualified in electronics or electrical
engineering. Users must have a working understanding of Peripheral Component
Interconnect (PCI), VMEbus, and telecommunications.
Conventions
Notation Description
57 All numbers are decimal numbers except when used with the
notations described below.
00000000
or 0x00000000
0000
or 0b0000
x Generic use of a letter
n Generic use of numbers
0.75 Decimal number
Bold Used to emphasize a word
Courier Used for on−screen output
Courier+Bold Used to characterize user input
Italics For references, table, and figure descriptions
File > Exit Notation for selecting a submenu
<text> Notation for variables and keys
[text] Notation for buttons and optional parameters
... Repeated item (example: A1, A2, A3, ..., A12)
.
.
.
16
2
Typical notation for hexadecimal numbers (digits 0 through F),
e.g. used for addresses and offsets
Same for binary numbers (digits are 0 and 1)
Omission of information from example/command that is not
necessary at the time being
.. Ranges, e.g.: 0..4 means one of the integers 0, 1, 2, 3, and 4
| Logical OR
14 SPARC/CPU−56T
(used in register description tables)
No danger encountered. Pay attention to important
information
Page 15
Notation Description
Possibly dangerous situation: slight injuries to people or
Dangerous situation: injuries to people or severe damage to
p
p
Possibly dangerous situation: slight injuries to people or
damage to objects possible
Dangerous situation: injuries to people or severe damage to
objects possible
Start of a procedure
End of a procedure
Abbreviations
Abbreviation Description
B
BGA
BIB Board Information Block
BMC Base Board Management Controller
C
CAS
CSR Control Status Register
D
DMA
DRAM Dynamic Random Access Memory
E
ECC
EEPROM Electrically Erasable Programmable Read−Only Memory
EPROM Erasable Programmable Read Only Memory
ESD
B
Ball Grid Array
C
Column Address Select
D
Direct Memory Access
E
Error−Correction Code
Electrostatic Sensitive Device
SPARC/CPU−56T 15
Page 16

Abbreviation Description
F
F
FAE
FIFO First In First Out
FPGA Field−Programmable Gate Array
I
IBMU
ICMB Intelligent Chassis Management Bus
ICT In−Circuit Test
IDE Integrated Drive Electronics
IEC International Electric Code
IOBP Input Output Back Panel
IOM I/O Memory Management Unit
IPMB Intelligent Platform Management Bus
IPMI Intelligent Platform Management Interface
ISO International Organization for Standardization
J
JTAG
L
LCA
LDO Local Data Output
LED Light Emitting Diode
LVD Low Voltage Differential
LVTTL Low Voltage Transistor Transistor Logic
M
Field Application Engineers
I
Intelligent Board Management Unit
J
Joint Test Access Group
L
Load Controller Assembly
M
MAC
MCU Memory Control Unit
MII Media Independent Interface
N
NEBS
NMI Nonmaskable Interrupt
NVRAM Nonvolatile Random Access Memory
O
OBDIAG
P
PBM
PCB Printed Circuit Board
PCI
16 SPARC/CPU−56T
Media Access Control Layer
N
Network Equipment Building Standards
O
OpenBoot Diagnostics
P
PCI Bus Module
Peripheral Component Interconnect
Page 17
Abbreviation Description
PCIO Peripheral Component Interconnect Input/Output
PHY Physical Layer
PIE PCI Interrupt Engine
PLCC Plastic Leadless Chip Carrier
PLL Phase−Locked Loop
PMC PCI Mezzanine Card
POST Power−On Self−Test
PROM Programmable Read Only Memory
R
R
RIC
ROM Read Only Memory
RTB Rear Transition Board
RTC Real−Time Clock
RTOS Real Time Operating System
S
SDRAM
SELV Safety Extra Low Voltages
SPD Serial Presence Detect
SRAM Static Random Access Memory
STP Shielded Twisted Pair
T
TPE
U
UART
UIC UPA Interrupt Connector
USB Universal Serial Bus
UTP Unshielded Twisted Pair
V
VME
Reset/Interrupt/Clock Controller
S
Synchronous DRAM
T
Twisted Pair Ethernet
U
Universal Asynchronous Receiver−Transmitter
V
Versa Module Eurocard
Revision History
Order No. Rev. Date Description
220306 AA May 2003 Preliminary
Manual
220306 AB September 2003 Final release
version
SPARC/CPU−56T 17
Page 18
Order No. DescriptionDateRev.
223146 AA April 2004 Corrected number
of SUN patch for
audio support.
Now it reads
109896−17; added
note to abort/reset
key description;
corrected feature
list of FRctrl
Solaris driver
224548 AA November 2004 Corrected typical
and maximum
power
consumption
values for 5V.a
18 SPARC/CPU−56T
Page 19
Other Sources of Information
For further information refer to:
Company www. Document
ALI Corporation ali.com.tw ALI M1535D+ Southbridge documentation
Force Computers forcecomputers.com SPARC/IOBP−CPU−56 Installation Guide
aa SPARC/IOBP−IO−56 Installation Guide
SPARC/MEM−550 Installation Guidea
ACC/CABLE/SCSI−U160 Installation Guide
ACC/CABLE/RS422 Installation Guide
IEEE Standards
Department
Intel intel.com Intel 82540 Ethernet controller specifications
aa aa Intel LXT971 PHY device specifications
LSI Logic lsilogic.com 53C1010 SCSI controller specifications
Maxim maxim−ic.com MAX1617 temperature sensor specifications
STMicroelectronicsst.com M48T35AV RTC/NVRAM specifications
National
Semiconductor
PCI Special
Interest Group
PICMGPCI
Special Interest
Group
SUN sun.com UltraSPARCIIi+ Processor specifications
aa aa SUN SME2300 PCIO−2 controller
Tundra tundra.com Universe II documentation
ieee.com IEEE P1386 Standard Mechanics for a Common
Mezzanine Card Family: CMC
national.com PC87307/PC97307 Plug and Play Compatible
Super I/O, Preliminary Specification, March
1998
pcisig.com PCI Local Bus Specification Rev2.1
picmg.org
pcisig.com
PCI Local Bus Specification Rev2.2
documentation
VITA vita.com VME64 Standard ANSI/VITA 1−1994
aa aa VME64 Extensions Draft Standard, Draft 1.8, Jun
13, 1997
Xilinx
SPARC/CPU−56T 19
xilinx.com Spartan XC520XL FPGA specifications
Page 20
Safety Notes
The text in this chapter is a translation of the Sicherheitshinweise" chapter
This section provides safety precautions to follow when installing, operating, and
maintaining the board.
We intend to provide all necessary information to install and handle the board in this
Installation Guide. However, as the product is complex and its usage manifold, we do not
guarantee that the given information is complete. If you need additional information, ask
your Force Computers representative.
The board has been designed to meet the standard industrial safety requirements. It
must not be used except in its specific area of office telecommunication industry and
industrial control.
Only personnel trained by Force Computers or persons qualified in electronics or
electrical engineering are authorized to install, remove or maintain the board. The
information given in this manual is meant to complete the knowledge of a specialist
and must not be taken as replacement for qualified personnel.
EMC
The board has been tested in a Standard Force Computers system and found to comply
with the limits for a Class A digital device in this system, pursuant to part 15 of the
FCC Rules respectively EN 55022 Class A. These limits are designed to provide
reasonable protection against harmful interference when the system is operated in a
commercial environment.
The board generates and uses radio frequency energy and, if not installed properly and
used in accordance with this Installation Guide, may cause harmful interference to
radio communications. Operating the system in a residential area is likely to cause
harmful interference, in which case the user will be required to correct the interference
at his own expense.
To ensure proper EMC shielding, always operate the board with the blind panel or
with PMC module installed. If boards are integrated into open systems, always cover
empty slots.
Switch Settings
Switches marked as ’reserved’ might carry production−related functions and can cause
the board to malfunction if their setting is changed. Therefore, only change settings of
switches not marked as ’reserved’.
20 SPARC/CPU−56T
Page 21

Setting/resetting the switches during operation causes board damage. Therefore, check
and change switch settings before you install the board.
Installation
Electrostatic discharge and incorrect board installation and removal can damage
circuits or shorten their life. Therefore:
S Touching the board or electronic components in a non−ESD protected environment
causes component and board damage. Before touching boards or electronic
components, make sure that you are working in an ESD−safe environment.
S When plugging the board in or removing it, do not press or pull on the front panel
but use the handles.
S Before installing or removing an additional device or module, read the respective
documentation.
S Make sure that the board is connected to the VME backplane via all assembled
connectors and that power is available on all power pins.
Power Up
If an unformatted floppy disk resides in a floppy drive connected to the VME board
during power up, the VME board does not boot and the OpenBoot prompt does not
appear. Therefore, never boot the VME board with an unformatted floppy disk
residing in a floppy drive connected to the VME board.
a
Operation
While operating the board ensure that the environmental and power requirements are
met:
S To ensure that the operating conditions are met, forced air cooling is required
within the chassis environment.
S High humdity and condensation on the surface cause short circuits. Only operate
the board above 0°C. Make sure the board is completely dry and there is no
moisture on any surface before applying power.
Replacement/Expansion
Only replace or expand components or system parts with those recommended by Force
Computers. Otherwise, you are fully responsible for the impact on EMC or any
possible malfunction of the product.
SPARC/CPU−56T 21
Page 22

Check the total power consumption of all components installed (see the technical
specification of the respective components). Ensure that any individual output current
of any source stays within its acceptable limits (see the technical specification of the
respective source).
RJ−45 Connector
The RJ−45 connector on the front panel must only be used for twisted−pair Ethernet
(TPE) connections. Connecting a telephone to such a connector may destroy your
telephone as well as your board. Therefore:
S Clearly mark TPE connectors near your working area as network connectors
S Only connect TPE bushing of the system to safety extra low voltage (SELV) circuits.
S Make sure that the length of the electric cable connected to a TPE bushing does not
exceed 100 meter.
If you have further questions, ask your system administrator.
Battery
If a lithium battery on the board has to be exchanged (see Appendix Battery Exchange),
observe the following safety notes:
S Wrong battery exchange may result in a hazardous explosion and board damage.
Therefore, always use the same type of lithium battery as is installed and make sure
the battery is installed as described.
S Exchanging the battery after seven years of actual battery use have elapsed results
in data loss. Therefore, exchange the battery before seven years of actual battery use
have elapsed.
S Exchanging the battery always results in data loss of the devices which use the
battery as power backup. Therefore, back up affected data before exchanging the
battery.
Environment
Always dispose of used batteries and/or old boards according to your country’s
legislation, if possible in an environmentally acceptable way.
22 SPARC/CPU−56T
Page 23

Sicherheitshinweise
Dieser Abschnitt enthält Sicherheitshinweise, die bei Einbau, Betrieb und Wartung des
Boards zu beachten sind.
Wir sind darauf bedacht, alle notwendigen Informationen, die für die Installation und den
Betrieb erforderlich sind, in diesem Handbuch bereit zu stellen. Da es sich jedoch bei dem
Board um ein komplexes Produkt mit vielfältigen Einsatzmöglichkeiten handelt, können
wir die Vollständigkeit der im Handbuch enthaltenen Informationen nicht garantieren.
Falls Sie weitere Informationen benötigen sollten, wenden Sie sich bitte an die für Sie
zuständige Geschäftsstelle von Force Computers.
Das Board erfüllt die für die Industrie geforderten Sicherheitsvorschriften und darf
ausschliesslich für Anwendungen in der Telekommunikationsindustrie und im
Zusammenhang mit Industriesteuerungen verwendet werden.
Einbau, Wartung und Betrieb dürfen nur von durch Force Computers ausgebildetem
oder im Bereich Elektronik oder Elektrotechnik qualifiziertem Personal durchgeführt
werden. Die in diesem Handbuch enthaltenen Informationen dienen ausschliesslich
dazu, das Wissen von Fachpersonal zu ergänzen, können es aber in keinem Fall
ersetzen.
EMV
Das Board wurde in einem Force Computers Standardsystem getestet. Es erfüllt die für
digitale Geräte der Klasse A gültigen Grenzwerte in einem solchen System gemäß den
FCC−Richtlinien Abschnitt 15 bzw. EN 55022 Klasse A. Diese Grenzwerte sollen einen
angemessenen Schutz vor Störstrahlung beim Betrieb des Boards in Gewerbe− sowie
Industriegebieten gewährleisten.
Das Board arbeitet im Hochfrequenzbereich und erzeugt Störstrahlung. Bei
unsachgemäßem Einbau und anderem als in diesem Handbuch beschriebenen Betrieb
können Störungen im Hochfrequenzbereich auftreten.
Warnung! Dies ist eine Einrichtung der Klasse A. Diese Einrichtung kann im
Wohnbereich Funkstörungen verursachen. In diesem Fall kann vom Betreiber verlangt
werden, angemessene Maßnahmen durchzuführen.
Wenn Sie das Board ohne PMC Modul verwenden, schirmen Sie freie Steckplätze mit
einer Blende ab, um einen ausreichenden EMV Schutz zu gewährleisten. Wenn Sie
Boards in Systeme einbauen, schirmen Sie freie Steckplätze mit einer Blende ab.
Schaltereinstellungen
Das Ändern der mit ’reserved’ gekennzeichneten Schalter kann zu Störungen im
Betrieb des Boards führen. Ändern Sie die Schaltereinstellungen der mit ’reserved’
SPARC/CPU−56T 23
Page 24
gekennzeichneten Schalter nicht, da diese Schalter mit produktionsrelevanten
Funktionen belegt sein können, die im normalen Betrieb Störungen auslösen könnten.
Das Ändern der Schaltereinstellungen während des laufendes Betriebs kann das Board
beschädigen. Prüfen und ändern Sie die Schaltereinstellungen, bevor Sie das Board
installieren.
Installation
Elektrostatische Entladung und unsachgemäßer Ein− und Ausbau des Boards kann
Schaltkreise beschädigen oder ihre Lebensdauer verkürzen. Beachten Sie deshalb die
folgenden Punkte:
S Berühren Sie das Board oder elektrische Komponenten in einem nicht
ESD−geschützten Bereich, kann dies zu einer Beschädigung des Boards führen.
Bevor Sie Boards oder elektronische Komponenten berühren, vergewissern Sie
sich, dass Sie in einem ESD−geschützten Bereich arbeiten.
S Drücken Sie beim Ein− oder Ausbau des Boards nicht auf die Frontplatte, sondern
benutzen Sie die Griffe.
S Lesen Sie vor dem Ein− oder Ausbau von zusätzlichen Geräten oder Modulen das
dazugehörige Benutzerhandbuch.
Booten
Betrieb
S Vergewissern Sie sich, dass das Board über alle Stecker an die VME Backplane
angeschlossen ist und alle Spannungskontakte mit Strom versorgt werden.
Befindet sich während des Bootens eine unformatierte Diskette in einem mit dem
VME Board verbundenen Diskettenlaufwerk, bootet das VME Board nicht, und die
OpenBoot−Eingabeaufforderung erscheint nicht. Booten Sie deshalb niemals das VME
Board, wenn sich eine unformatierte Diskette in einem mit dem VME Board
verbundenen Diskettenlaufwerk befindet.
Achten Sie darauf, dass die Umgebungs− und die Leistungsanforderungen während
des Betriebs eingehalten werden:
S Um zu gewährleisten, dass die Anforderungen während des Betriebs eingehalten
werden, ist eine Luftkühlung notwendig
S Betreiben Sie das Board nur innerhalb der angegebenen Grenzwerte für die relative
Luftfeuchtigkeit und Temperatur, da durch hohe Luftfeuchtigkeit Kurzschlüsse
24 SPARC/CPU−56T
Page 25

entstehen können. Stellen Sie vor dem Einschalten des Stroms sicher, dass sich auf
dem Board kein Kondensat befindet und betreiben Sie das Board nicht unter 0°C.
Wenn Sie das Board in Gebieten mit starker elektromagnetischer Strahlung betreiben,
stellen Sie sicher, dass das Board mit dem System verschraubt ist und das System
durch ein Gehäuse abgeschirmt wird.
Stellen Sie sicher, dass Anschlüsse und Kabel des Boards während des Betriebs nicht
versehentlich berührt werden können.
Austausch/Erweiterung
Verwenden Sie bei Austausch oder Erweiterung nur von Force Computers empfohlene
Komponenten und Systemteile. Andernfalls sind Sie für mögliche Auswirkungen auf
EMV oder Fehlfunktionen des Produktes voll verantwortlich.
Überprüfen Sie die gesamte aufgenomme Leistung aller eingebauten Komponenten
(siehe die technischen Daten der entsprechenden Komponente). Stellen Sie sicher, dass
die Stromaufnahme jedes Verbrauchers innerhalb der zulässigen Grenzwerte liegt
(siehe die technischen Daten des entsprechenden Verbrauchers).
RJ−45 Stecker
Batterie
Der RJ−45 Stecker auf der Frontblende darf nur für Twisted−Pair−Ethernet (TPE)
Verbindungen verwendet werden. Beachten Sie, dass ein versehentliches Anschließen
einer Telefonleitung an einen solchen TPE Stecker sowohl das Telefon als auch das
Board zerstören kann. Beachten Sie deshalb die folgenden Hinweise:
S Kennzeichnen Sie TPE−Anschlüsse in der Nähe Ihres Arbeitsplatzes deutlich als
Netzwerkanschlüsse.
S Schließen Sie an TPE−Buchsen ausschließlich SELV−Kreise
(Sicherheitskleinspannungsstromkreise) an.
S Die Länge des mit dem Board verbundenen Twisted−Pair Ethernet−Kabels darf 100
m nicht überschreiten.
Falls Sie Fragen haben, wenden Sie sich bitte an Ihren Systemadministrator.
Muss eine Lithium−Batterie auf dem Board ausgetauscht werden (siehe Appendix
Battery Exchange), beachten Sie die folgenden Sicherheitshinweise:
S Fehlerhafter Austausch von Lithium−Batterien kann zu lebensgefährlichen
Explosionen führen. Verwenden Sie deshalb nur den Batterietyp, der auch bereits
eingesetzt wurde und befolgen Sie die Installationsanleitung.
SPARC/CPU−56T 25
Page 26

S Verwenden Sie die Batterien länger als sieben Jahre, kann dies zu Datenverlusten
führen. Tauschen Sie deshalb die Batterie aus, bevor sieben Jahre reiner Betrieb
vorüber sind.
S Der Austausch der Batterie bringt immer einen Datenverlust bei den Komponenten
mit sich, die sich durch die Batterie die Stromversorgung sichern. Sichern Sie
deshalb vor dem Batterieaustausch Ihre Daten.
Umweltschutz
Entsorgen Sie alte Batterien und/oder Boards stets gemäß der in Ihrem Land gültigen
Gesetzgebung, wenn möglich immer umweltfreundlich.
26 SPARC/CPU−56T
Page 27
1
Introduction
Features 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Standard Compliances 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ordering Information 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Nomenclature 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Order Numbers 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 27
Page 28

Introduction Features
Features
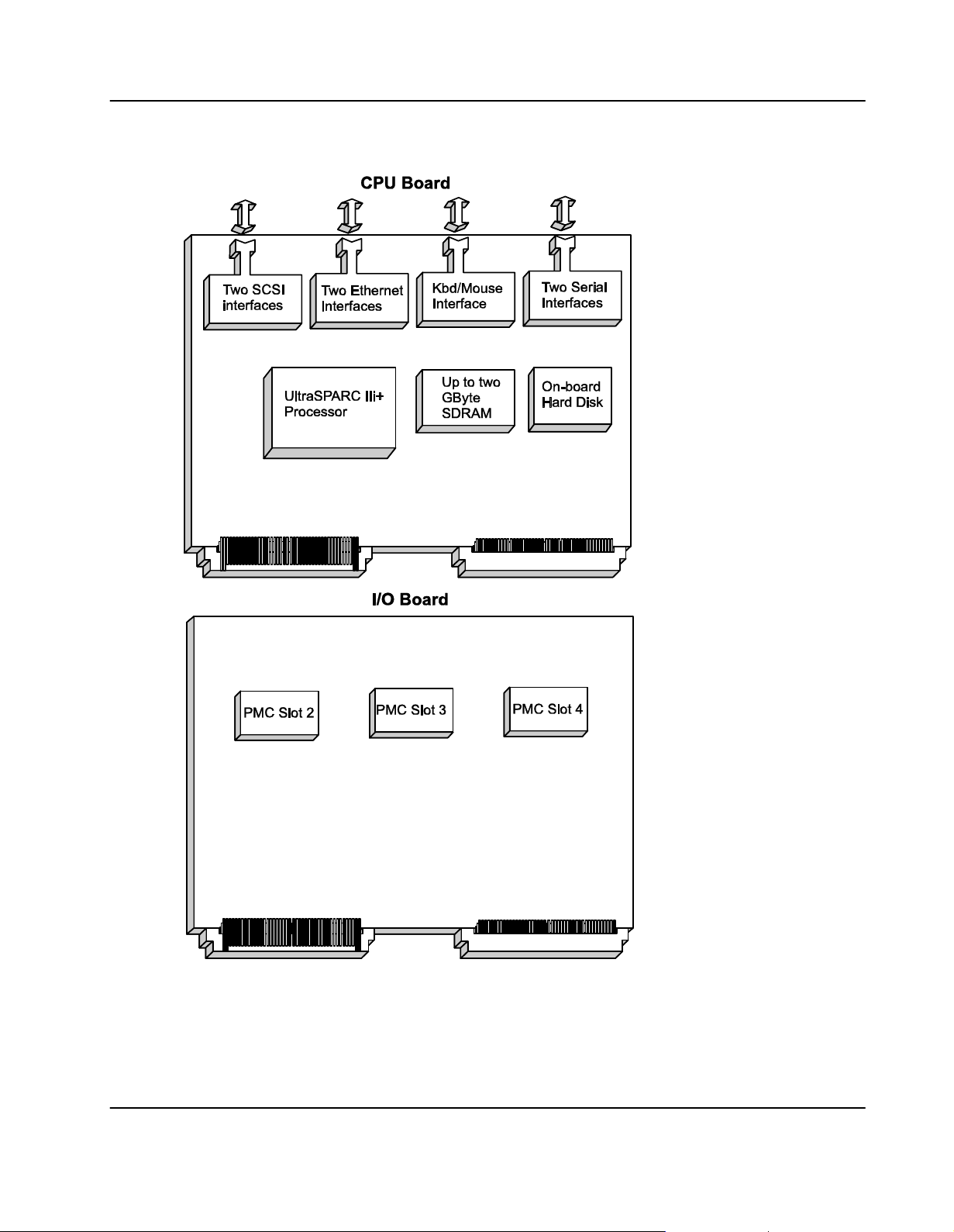
The SPARC/CPU56 is a high−performance VME single−board computer based on the 650
Mhz UltraSPARC IIi+ processor. It provides 512 MByte on−board SDRAM memory.
Important features are:
S Two Wide Ultra3 SCSI interfaces via front panel and one via I/O board′s IOBP
S Two 10/100/1000 BaseT Ethernet interfaces via front panel
S One 10/100 BaseT interface via front panel or CPU board′s IOBP
S Two serial RS−232 interfaces via front panel
S Two RS−232/RS−454 interfaces via CPU board′s IOBP
S Three USB interfaces via CPU board′s IOBP
S Optional on−board hard disk
S Keyboard/Mouse interface via front panel or CPU board′s IOBP
S Floppy disk and parallel interface via CPU board′s IOBP
S Three PMC slots on I/O board
S Solaris 8/9 and VxWorks support
a
28 SPARC/CPU−56T
Page 29
Features Introduction
Figure 1: Function Blocks
SPARC/CPU−56T 29
Page 30
Introduction Standard Compliances
Standard Compliances
The CPU board was designed to comply with the standards listed below.
Table 1: Standard Compliances
Standarda
IEC 68−2−1/2/3/13/14 Climatic environmental requirements.
IEC 68−2−6/27/32 Mechanical environmental requirements
EN 609 50/UL 1950 (predefined Force system);
UL 94V−0/1
EN 55022,a
EN 55024,
FCC Part 15 Class A
ANSI/IPC_A−610 Rev. B Class 2
ANSI/IPC−R−700B
ANSI−J−001...003
ISO 8601
Description
Legal safety requirements
EMC requirements on system level
Manufacturing requirements
Y2K compliance
30 SPARC/CPU−56T
Page 31

Ordering Information Introduction
Ordering Information
When ordering board variants, hard− and software upgrades use the order numbers
given below.
Product Nomenclature
In the following table you find the key for the product name extensions used for board
variants.
Table 2: Product Nomenclature
SPARC/CPU−56T/xxx−ccc−Lyyy−zz
xxx SDRAM capacity in MByte
ccc CPU speed in MHz
Lyyy L2−cache in KByte
a
zz
Order Numbers
The table below is an excerpt from the board’s ordering information. Ask your local Force
Computers representative for the current ordering information.
Table 3: Board Ordering Information
Order No.
111328 512−650−L512−16 512 MByte SDRAM, 650 MHz CPU
The table below is an excerpt from the board’s accessories ordering information. Ask your
local Force Computers representative for the current ordering information.
Table 4: Board Accessories Ordering Information
Order No. Accessory Description
111330 SPARC/IOBP−CPU−56/3 Three−row variant of CPU board′s
111331 SPARC/IOBP−CPU−56/5 Five−row variant of CPU board′s
Flash memory size in MByte
SPARC/CPU−56T/... Description
frequency, 512 KByte L2 cache and 16
MByte flash memory
IOBP
IOBP
120455
SPARC/CPU−56T 31
SPARC/IOBP−IO−56/5 Five−row variant of I/O board′s
IOBP
Page 32

Introduction Ordering Information
Order No. DescriptionAccessory
120456 SPARC/IOBP−IO−56/3 Three−row variant of I/O board′s
IOBP
111332 ACC/CABLE/SCSI−U160 SCSI−3−to−SCSI−4 adapter cablea
120454 ACC/CABLE/RS422 RS232−to−RS422 serial adapter cablea
109045a SPARC/MEM−550/1024 Memory module with 1 GByte
memory
107257
ACC/CABLE/KBDMSE/540 Splitter cable for PS2/SUN
keyboard/mouse
32 SPARC/CPU−56T
Page 33

2
Installation
Action Plan 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Requirements 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Environmental Requirements 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power Requirements 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hardware Accessories 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IOBPs for CPU and I/O Board 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PMC Modules 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installation Procedure 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memory Modules 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hard Disk 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI−U160 Cable 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RS−422 Cable 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PS/2 Splitter Cable 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Switch Settings 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Board Installation 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Backplane Configuration 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installing the CPU Board 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Removing the CPU Board 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Powering Up 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PLCC PROM and Flash Memory Device 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installing Solaris 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Solaris Driver Package 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCgei 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCvme 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 33
Page 34

FRCflash 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCctrl 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FRCplatmod 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34 SPARC/CPU−56T
Page 35

Action Plan Installation
Action Plan
In order to install the board, the following steps are necessary and will be described in
further detail in the sections of this chapter.
SPARC/CPU−56T 35
Page 36

Installation Requirements
Requirements
In order to meet the environmental requirements, the CPU board has to be tested in the
system in which it is to be installed.
Before you power up the board, calculate the power needed according to your
combination of board upgrades and accessories.
Environmental Requirements
The environmental conditions must be tested and proven in the used system
configuration. The conditions refer to the surrounding of the board within the user
environment.
Note:aOperating temperatures refer to the temperature of the air circulating around the
board and not to the actual component temperature.
a
S Board damage
Operating the board in a chassis without forced air cooling may lead to board
damage.
When operating the board, make sure that forced air cooling is available.
S Board damage
High humidity and condensation on the board surface causes short circuits.
Do not operate the board outside the specified environmental limits. Make sure the
board is completely dry and there is no moisture on any surface before applying
power. Do not operate the board below 0°C.
Table 5: Environmental Requirements
Feature Operating Non−Operating
Temperature
Forced airflow 300 LFM (linear feet per minute) −
Temp. change
Rel. humidity
Altitude −300 m to + 3,000 m −300 m to + 13,000 m
Vibration aa aa
0°C to +50°C −40°C to +85°C
+/− 0.5°C/min +/− 1.0°C/min
5% to 95% non−condensating at +40°C
5% to 95% non−condensating at
+40°C
10 to 15 Hz
15 to 150 Hz
36 SPARC/CPU−56T
2 mm amplitude
2 g
5 mm amplitude
5 g
Page 37

Requirements Installation
Feature Non−OperatingOperating
Shock 5g/11 ms halfsine 15g/11 ms halfsine
Free fall 100 mm / 3 axes 1,200 mm / all edges and corners
(packed state)
Power Requirements
The board power requirements depend on the installed hardware accessories. In the
following table you will find typical examples of power requirements without any
accessories installed. If you want to install accessories on the board, the load of the
respective accessory has to be added to that of the board. For information on the
accessories’ power requirements, refer to the documentation delivered together with the
respective accessory or consult your local Force Computers representative for further
details.
The power supply has to meet the requirements given in the tables below.
Table 6: Power Requirements
Requirement
Minimum Voltage 4.88V 11.64V
Typical Voltage 5V 12V
Maximum Voltage 5.25V 12.6V
Typical Current 6A 1.5A
Maximum Current 7A 1.63A
Typical Power Requirement 30W 18W
Maximum Power Requirement
5V 12V
35W 20W
Note:aThe CPU board only powers up if the 5V and 12V supply voltages are stable and
within their limits. This complies to the VMEbus specification. However, there are
systems which are not fully VMEbus−compliant. The power supplies of these systems
do not turn on the 12V supply if the 5V supply has not been loaded before. Use a
VMEbus board which loads the 5V in these systems to avoid a power−up deadlock
situation.
a
SPARC/CPU−56T 37
Page 38

Installation Hardware Accessories
Hardware Accessories
The following upgrades and accessories are available:
S IOBPs for CPU and I/O Board
S PMC modules
S Memory modules
S Hard Disk
S SCSI−U160 cable
S RS−422 serial cable
S PS2 splitter cable
IOBPs for CPU and I/O Board
As separate price list items two IOBPs are available for the SPARC/CPU−56T. One is
called SPARC/IOBP−IO−56 and is connected to the I/O board. It is available in two
variants which differ in the number of VME connector rows: the three−row variant
SPARC/IOBP−IO−56−3 and the five−row variant SPARC/IOBP−IO−56−5. Both IOBPs
provide the following interfaces:
S SCSI (on SPARC/IOBP−IO−56−3 only single−ended SCSI)
S Audio
S PMC user I/O
For details about this IOBP and its installation refer to the
Guide.
The second IOBP is called SPARC/IOBP−CPU−56 and is connected to the CPU board. It is
available in two variants which also differ in the number of VMEconnector rows: the
three−row variant SPARC/IOBP−CPU−56−3 and the five−row variant
SPARC/IOBP−CPU−56−5. The interfaces available via both IOBP variants are:
S IDE
S 10/100Base−TX
S Parallel
aSPARC/IOBP−IO−56 Installation
S Two USB
S Two serial (RS−232 and RS−422)
38 SPARC/CPU−56T
Page 39

Hardware Accessories Installation
Note:aOn the IOBP−CPU−56−3 the RS−232 signals are limited to RXD, TXD, RTS and
CTS.
a
On the IOBP−CPU−56−5 the additional signals DTR, DSR, DCD and RI are available.a
In addition to these interfaces, the five−row variant IOBP−CPU−56−5 provides:
S Keyboard/mouse interface (SUN or PS/2 style)
S Third USB interface
S Floppy interface
S 10/100/1000 Base−TX Ethernet
For details about this IOBP and its installation refer to the
Installation Guide.
Board Damage
Using the board together with IOBPs for which it is not designed, may destroy the
board.
a
Only use the board together with the IOBP−CPU−56 or IOBP−IO−56.
PMC Modules
The I/O board allows to install three PMC modules compliant to IEEE P1386.a
Note:aThe used PMC modules must be compliant with the safety regulations of the
country where the equipment is installed.
The corresponding PMC slots are PMC slots 2, 3 and 4. The following figure shows which
PMC connectors are assigned to each PMC slot.
aSPARC/IOBP−CPU−56
a
SPARC/CPU−56T 39
Page 40

Installation Hardware Accessories
PMC#4 PMC#3 PMC#2
PMC slot 2 supports a 64−bit data bus width with a maximum frequency of 33 MHz and
is attached to PCI bus B. PMC slots 3 and 4 support a 64−bit data bus width with a
maximum frequency of 66 MHz and are attached to PCI bus C.
a
If a 32−bit PMC module is mounted into PMC slots 3 and 4, the Sentinel64 PCI−to−PCI
bridge dynamically detects the 32−bit bus and changes its transfer size to 32−bit for this
PMC module. If a 64−bit PMC module is mounted into PMC slots 3 and 4, burst transfers
between all 64−bit PCI devices on PCI bus B and C will be 64−bit PCI transfers.
Note:aIf a 33−MHz PMC module is mounted into PMC slots 3 and 4, the whole PCI bus
C will run with 33 MHz only. This may result in performance degradation.
The signaling level of each PMC slot is determined via a voltage key which has to be
installed into one of two holes that belong to each PMC slot. One hole corresponds to a
signalling level of 5V, the other to a signaling level of 3.3V. Depending on the hole the
voltage key is installed into, the signaling level is set accordingly. This is illustrated in the
figure below.
Figure 2: Location of PMC Voltage Keys
a
5V
3.3V
By default, PMC slots 3 and 4 have a signaling level of 3.3V and PMC slot 2 has a
signaling level of 5V. A description of how to change the signalling level for a PMC slot is
given in the following installation procedure.
a
Note:aA 66−MHz PCI bus configuration requires that the signaling level and therefore
the VI/O voltage is 3.3 V.
40 SPARC/CPU−56T
Page 41

Hardware Accessories Installation
Installation Procedure
Note:a
S To ensure proper EMC shielding, either operate each PMC slot with a blind panel
or with a PMC module installed.
S If the SPARC/CPU−56T is upgraded with PMC modules, ensure that the blind
panels are stored in a safe place in order to be used again when removing the
respective PMC module.a
S Processor PMC modules are only supported in non−monarch mode.a
Removing I/O Board
Start
1. Remove the 14 screws from I/O board which fix it to CPU board
SPARC/CPU−56T 41
Page 42

Installation Hardware Accessories
2. Carefully remove I/O board from CPU board by unplugging it from PMC
connectors
Finish
Changing Signaling Level
Start
1. Remove screw which fixes the voltage key to IO board
Voltage Key
Screw
2. Remove voltage key
3. Place voltage key into hole which corresponds to desired signalling level
5V
3.3V
Note:aThe signaling levels of PMC slots 3 and 4 must be equal. Otherwise they are
automatically set to 3.3V.
42 SPARC/CPU−56T
a
Page 43

Hardware Accessories Installation
4. Fix voltage key to I/O board by fastening screw
Voltage Key
Screw
Finish
Installing the PMC Module
Start
1. Plug PMC module into desired PMC connectors of I/O board
PMC#4 PMC#3 PMC#2
PMC Module Damage
If the power consumption of the PMC module exceeds 7.5W, the board and the PMC
module are damaged.
Make sure that the total power consumption at +/−12V, 5V and 3.3V level does not
exceed 7.5W.
2. Make sure standoffs of PMC module cover mounting holes of I/O board
3. Place screws delivered with PMC into mounting holes
SPARC/CPU−56T 43
Page 44

Installation Hardware Accessories
4. Fasten screws
Finish
Reinstalling I/O Board
Start
1. Plug I/O board onto PMC connectors of CPU board
2. Fix it by fastening the 14 screws which you previously have removed
Finish
Memory Modules
The main memory capacity is adjustable via installation of a Force Computers memory
module. Currently the SPARC/MEM−550 is available for the CPU−56T. It provides 1
GByte memory .
Before installing the memory module you have to remove the I/O board and afterwards
you have to reinstall it. How this is done is described in the previous section "PMC
Modules".
The memory module has to be installed into the connectors P8 and P9.a
a
P8
P9
44 SPARC/CPU−56T
Page 45

Hardware Accessories Installation
The actual memory module installation procedure is described in theaSPARC/MEM−550
Installation Guide
a which is delivered together with the memory module.a
Hard Disk
A hard disk is available for the CPU board on request. It can be connected to the IDE1
interface which is accessible via an on−board connector.
a
Before installing the hard disk you have to remove the I/O board and afterwards you
have to reinstall it. How this is done is described in the previous section "PMC Modules".
The actual installation of the hard disk is described in the Installation Guide delivered
together with the hard disk.
a
SCSI−U160 Cable
The SCSI−U160 cable is available as accessory kit called ACC/CABLE*SCSI*U160. It
provides a SCSI U160 cable with a length of three meters which has one SCSI*3 and one
SCSI*4 connector at its ends. It can be used to connect SCSI devices to the CPU board.
For details, refer to the
together with the accessory kit.
aACC/CABLE/SCSI−U160 Installation Guidea which is delivered
a
RS−422 Cable
The RS−422 cable is available as accessory kit called ACC/CABLE*RS*422 and
provides a serial cable with a length of 2.6 meters that has one male DSub9 RS*422 and
one female mini DSub9 RS*232 connector at its ends. It allows to connect RS*422
devices to the serial B interface of the CPU board. For details, refer to
the
aACC/CABLE/RS−422 Installation Guideawhich is delivered together with the accessory
a
kit.
PS/2 Splitter Cable
The PS/2 splitter cable can be connected to the SUN−type keyboard/mouse connecter of
the CPU board or its IOBP. It allows to operate a PS/2−style keyboard and mouse.
a
SPARC/CPU−56T 45
Page 46

Installation Switch Settings
Switch Settings
Board Damage
Setting/resetting the switches during operation causes board damage.
Therefore, check and change switch settings before you install the board.
The CPU board provides four configuration switches: SW1, SW2, SW3 and SW4.
8G
O
N
1
234
8G
SW4
O
N
1
234
8G
O
N
1
234
8G
O
N
1
234
Figure 3: Location of Switches on Board’s Top Side
Table 7: Switch Settings
Switch No. Description
SW1 1 Flash memory write protection
OFF (default): Flash memory writing disabled
ON: Flash memory writing enabled
2 Boot device selection
OFF (default): Boot from PLCC PROM
ON: Boot from flash memory device
3 Enable watchdog
OFF (default): Watchdog disabled
ON: Watchdog enabled
4 Enable reset/abort key
OFF (default): reset/abort key enabled
ON: reset/abort key disabled
SW2 1..4 User defined switches. For detailed information refer to section
"Switch 1 and 2 Status Register".
SW3
1 Enable Termination for SCSI 1
OFF (default): Termination enabled
ON: Termination disabled
46 SPARC/CPU−56T
Page 47

Switch Settings Installation
Switch DescriptionNo.
2 Enable termination for SCSI 2
OFF (default): Termination enabled
ON: Termination disabled
3 Enable termination for SCSI 3 (on I/O−board, if applicable)
OFF (default): Termination enabled
ON: Termination disabled
4 Reserved
SW4 1..2 VME Slot 1 Detection
SW4−1 OFF (default): Automatic VMEbus slot 1 detection enabled
SW4−1 ON and SW4−2 OFF: VME slot 1 function enabled
SW4−1 ON and SW4−2 ON: VME slot 1 function disabled
3 External VMEbus SYSRESET function
OFF (default): VMEbus SYSRESET generates on−board RESET
ON: VMEbus SYSRESET does not generate on−board RESET
4 VMEbus SYSRESET generation
OFF (default): On−board reset is driven to VMEbus SYSRESET
ON: On−board reset is not driven to VMEbus SYSRESET
SPARC/CPU−56T 47
Page 48

Installation Board Installation
Board Installation
Board Damage
Installing the board into a powered system may damage this and other boards in the
system.
Only install the board into a non−powered system.a
Backplane Configuration
If the CPU board is plugged into slot 1 and configured accordingly with switch SW4 (refer
to Switch Settings" table), the board acts as IACK daisy−chain driver. Plugged in any
other slot, the board closes the IACKIN−IACKOUT path.
If one board is missing in this daisy chain, an active backplane will be able to
automatically transfer the signals to the next board in the chain. If the board is not
plugged into an active backplane, jumpers on the backplane will transmit the signals. The
jumpers have to be set manually.
a
a
Configuration Procedure
Start
1. Remove jumpers connecting BG3IN# and BG3OUT# signals from empty slot
on backplane where the CPU board is to be plugged into backplanea
2. Assemble jumpers for BG3IN# and BG3OUT# signals on lower and higher
slots on backplane where no board is plugged to ensure that daisy chain is not
interrupted
Finish
If configured accordingly, the CPU board recognizes automatically whether it is plugged
into slot 1 of the VMEbus backplane or in any other slot. This auto−configuration feature
requires SW4−2 to be set to the OFF position. The VMEbus system controller is enabled
via auto−configuration if the CPU board is plugged into slot 1. Otherwise, it is disabled.
Damage of the Board or Other VMEbus Participants
If more than one system controller is active in the VMEbus system, the board or other
VMEbus participants can be damaged.
Therefore, always ensure that only one CPU board is configured to be system controller
in the VMEbus system.
a
48 SPARC/CPU−56T
Page 49

Board Installation Installation
Installing the CPU Board
Procedure
Start
1. Check system documentation for all important steps to be taken before
switching off power
2. Take those steps
3. Switch off power
4. Plug board into system slot on left−hand side
Note:aMake sure all other boards which are plugged into the system are to the right of
the system board.
5. Fasten board with screws
6. Plug interface cables into front panel connectors, if applicable
7. Switch on power
Finish
Removing the CPU Board
Procedure
Start
a
1. Check system documentation for all important steps to be taken before
switching off power
2. Take those steps
3. Switch off power
SPARC/CPU−56T 49
Page 50

Installation Board Installation
4. Remove interface cables, if applicable
5. Unfasten screws
6. Remove board
Finish
Powering Up
We recommend to use a terminal when powering up the CPU board. The advantage of
using a terminal is that you do not need any frame buffer, monitor, or keyboard for initial
power up.
Note:a
S Before powering up, check the "Requirements" section for installation
prerequisites and requirements.
S If an unformatted floppy disk resides in a floppy drive connected to the CPU board
during power up, the CPU board does not boot and the OpenBoot prompt does not
appear.
S Check the consistency of the switch settings ("Switch Settings" table).
a
a
Power Up Procedure
Start
1. Connect a terminal to front panel serial I/O interface A marked as "SER A"
2. Switch on system
The monitor will display information about the OpenBoot booting process.a
3. Enter OpenBoot commands, if applicable
Finish
PLCC PROM and Flash Memory Device
By default, the CPU board boots from the 1 MByte PLCC PROM which is not writeable
and contains the OpenBoot firmware. Alternatively, a 16 MByte flash memory device can
be enabled with SW1−2 to store user applications and to boot from it.
a
50 SPARC/CPU−56T
Page 51

Board Installation Installation
Installing Solaris
The CPU board is designed to run with Solaris 8 2/02 or higher with the 64−bit kernel and
with Solaris 9. Pay attention to the guidelines in this section before and during Solaris
installation.
Note:aSolaris versions prior to version 8 2/2 are not supported. The CPU board runs
with 64−bit kernel only.
The following devices of the CPU board are not supported by the Solaris operating
system:
S Universe II PCI−to−VMEbus bridge
S On−board flash memory
S Temperature sensors, LEDs, timers and watchdog
S Intel 82540EM Ethernet device
S IDE device error handling
If you wish to use one of these devices, you need to install the Force Computers Solaris
Driver Package. Details will be given in the following sections.
a
a
a
If you want to use PS/2 keyboard and mouse, you have to customize the following
software groups during the Solaris installation:
S Developer system support
S End user system support
S Core system support
The customization consists of selecting "PS/2 keyboard and mouse device drivers (Root,
64 Bit) under "drivers for SME support (64 Bit)".
a
The remaining software groups do not require customization.a
Note:aDuring installation, make sure that the 64−bit support is enabled.a
If Solaris is already installed and you want to have PS/2 support afterwards, you have to
install the SUNWkmp2x for 64−bit package.
a
Note:aDuring the Solaris installation you may get the following Solaris error message:
"Could not reset the IDE core of SouthBridge". If this happens, try to install Solaris
from another CD−ROM drive or from a SCSI CDROM drive.
a
After the Solaris installation has finished, this Solaris error message can be avoided by
installing the Solaris Driver Package FRCcpu56pm.
SPARC/CPU−56T 51
Page 52

Installation Board Installation
For audio I/O and IDE ATA 100 support, you have to install Solaris patches. The
following table provides details.
Table 8: Solaris Patches
a
Supported Device
Audio I/O (if applicable) 8 109896−17 or newer
IDE ATA 100 8 108974−31 or newer
Solaris Driver Package
Force Computers provides a Solaris driver package which supports the following devices
and features of the CPU board:
S Universe II PCI−to−VMEbus bridge
S On−board flash memory
S Temperature sensors, LEDs and watchdog
S Intel 82540EM GBit Ethernet device
S CPU−56 platform mode friver for IDE device error handling
If you wish to use one of these devices you need to install the Force Computers Solaris
Driver Package Version 2.20.
Solaris Version Patch
9 Currently not supported. A patch will be
available in the near future.a
9 112954−03 or newer
a
For a detailled description of how to install and use it, refer to theaSolaris Driver Package
Rel. 2.20 Installation and Reference Guide
Computers S.M.A.R.T. server.
a
a which can be downloaded from the Force
The following table shows which driver has to be installed for a particular device.
Table 9: Devices and Their Appropriate Drivers
Device Driver Name
Intel 8254xEM GBit Ethernet controller FRCgei
Universe II PCI−to−VMEbus bridge FRCvme
On−board flash memorya FRCflash
Temperature sensors, LEDs and watchdog FRCctrl
IDE device (error handling)
52 SPARC/CPU−56T
FRCplatmod
Page 53

Board Installation Installation
Further information on these drivers is given in the following sections.a
FRCgei
The assignment of the driver’s instance number to an Intel 8254xEM GBit Ethernet device
can be viewed by booting with the OpenBoot command boot −v. Each device is shown
with the driver name and instance number during the Solaris boot up.
The other way to obtain the instance number of the Ethernet devices is to look into the file
/etc/path_to_inst. In order to do so, type the following:agrep fciprb /etc/path_to_inst
A typical output could be:
”/pci@1f,0/ethernet@2” 1 ”frcgei”
”/pci@1f,0/pci@/ethernet@1” 0 ”frcgei”
The first part in quotation marks specifies the hardware node name in the device tree. The
number specifies the instance number and the third part also in quotation marks specifies
the driver name.
a
FRCvme
The following table shows how the hardware node names are assigned to a label on the
front panel and the IOBP−CPU−56.
Label Location Hardware Node
ETHERNET1/3 CPU front panel or
IOBP−CPU−56
ETHERNET2 CPU front panel /pci@1f,0/pci@4/ethernet@1
ETHERNET4
IOBP−CPU−56 /pci@1f,0 ethernet@2
a
Standard Solaris eri Ethernet device
The following table shows how the driver instance numbers are typically assigned to
Ethernet devices on the CPU board.
Label Location Driver/Instance Number
ETHERNET1/3 CPU front panel or IOBP−CPU−56 eri0
ETHERNET2 CPU front panel frcgei1
ETHERNET4
IOBP−CPU−56 frcgei0
a
The FRCvme is a set of drivers which handles the Universe II device. The following
functions are supported:
S Master windows
SPARC/CPU−56T 53
Page 54

Installation Board Installation
S Slave windows
S Interrupts
S DMA controller
S VME arbiter
S Mailboxes
Additionally, the FRCvme package provides a common programming interface for
application and driver development.
FRCflash
For more detailed information and board−specific notes, refer to the
Installation and Reference Guide
a and theaSolaris VMEbus Driver Programmer’s Guide.a
aSolaris Driver Package
The Solaris 2.x flash memory driver provides access to the flash memory device.
Depending on the CPU board′s switch settings, the flash memory is accessible as one user
flash or is divided into a boot and a user section.
a
The following table shows the effects the different CPU board switch settings have on the
flash segmentation and the flash write protection.
Table 10: Flash Segmentation and Write Protection
SW1−1 Setting
OFF OFF 16 MByte user flash, write−protected PLCC PROM
ON OFF 16 MByte user flash, not
OFF ON 1 MByte boot flash + 15 MByte user
ON ON 1 MByte boot flash + 15 MByte user
SW1−2 Setting Flash Segmentation/Write−Protection Boot from
write−protected
flash, write−protected
flash, not write−protected
a
PLCC PROM
Flash memory device
Flash memory device
FRCctrl
The FRCctrl driver contains the sysconfig device driver which offers the following
features:
S Sets all user LEDs
S Accesses the temperature sensor devices
To enable the temperature sensors, set the OpenBoot environment variable
env−monitor before booting. To do so, enter at the prompt:
setenv env−monitor enabled
54 SPARC/CPU−56T
Page 55

Board Installation Installation
S Enables and triggers watchdog functions
To enable the watchdog, set switch SW1−3 to ON
S Increases the volume of a headphone (if applicable)
FRCplatmod
This driver ensures proper error handling for IDE devices. It should be installed
immediately after the Solaris installation has been completed.
a
If this driver is not installed, the system may send error messages or can panic in case of
IDE error handling.
a
SPARC/CPU−56T 55
Page 56

3
Controls, Indicators, and Connectors
Front Panel 57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LEDs 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Key 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connectors 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Serial I/O 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keyboard/Mouse 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
On−Board Connectors 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PMC 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memory Module 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IDE 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VME 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CPU Board 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/O Board 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56 SPARC/CPU−56T
Page 57

Front Panel Controls, Indicators, and Connectors
Front Panel
The following figure shows the connectors, keys and LEDs available on the front panel of
the CPU board.
R
S
T
123
4
S
E
R
A
B
K
B
D
M
S
E
E
T
H
1
E
T
H
2
a
P
M
C
4
P
S
C
S
I
1
S
C
S
I
2
M
C
3
P
M
C
2
Figure 4: CPU Board’s Front Panel
SPARC/CPU−56T 57
Page 58

Controls, Indicators, and Connectors Front Panel
LEDs
All four LEDs available at the front panel are multi−purpose LEDs. Depending on the
values contained in the LED control registers 1 to 4, they indicate either the board status
or different network activities. Furthermore, all LEDs can be operated in user LED
mode.
Registers".
Table 11: Description of Front Panel LEDs
aa For details about the LED control registers, refer to chapter Maps and
a
LED
1 Board Status (default)
2 User−LED Mode (default)
Description
Red: Board reset
Weak red (on pressing the RST key): Board abort
Weak red (during operation): 12V power supply on VME backplane not within its
limits
Green: Board running
Blinking red/weak red: No PCI activity within last two seconds
Blinking green: No boot code found
Blinking weak red: 5V power supply on VME backplane not within its limit
IDE Activity
Depending on LED control register 1 settings, the LED indicates the activity of IDE 1
or IDE 2.a
Ethernet Activity
Depending on LED control register 1 settings, the LED indicates activity of Ethernet
interfaces 1 to 4 or a combination of these
User−LED Mode
Via LED control register 1, the LED can be programmed to be OFF, green or red.
Via LED control register 2 the LED can be programmed to be red, green or OFF.
Furthermore it can be programmed to be blinking green or blinking red with
different blinking frequencies. By default, the LED is OFF.a
Ethernet Activity
Depending on LED control register 2 settings, the LED indicates activity of Ethernet
interfaces 1 to 4 or a combination of these
58 SPARC/CPU−56T
Page 59

Front Panel Controls, Indicators, and Connectors
LED Description
3 VME Bus Activity (default)
Red: Universe II asserted VME SYSFAIL signal to the VMEbus
Green: Universe II accesses the VMEbus as master
OFF: No SYSFAIL signal asserted and no Universe PCI−to−VME bridge activity
Ethernet Activity
Depending on LED control register 3 settings, the LED indicates activity of Ethernet
interfaces 1 to 4 or a combination of these
User−LED Mode
Via LED control register 3, the LED can be programmed to be OFF, green or red.
4 User−LED Mode (default)
Via LED control register 4, the LED can be programmed to be red, green or OFF.
Furthermore, it can be programmed to be blinking green or blinking red with
different blinking frequencies. By default, the LED is OFF.a
Ethernet Activity
Depending on LED control register 4 settings, the LED indicates activity of Ethernet
interfaces 1 to 4 or a combination of these.
Key
The front panel of the CPU board provides one key.a
R
S
T
123
This key has two functions. When pressed longer than 0.5 s, a reset is generated which is
indicated by the LED 1 shining red. When the key is pressed for a period shorther than 0.5
s, an abort is generated which is indicated by the LED 1 shining weak red.
Note:aAn abort should only be triggered if an application under Solaris or OpenBoot
hangs. Do not trigger an abort to enter OpenBoot or to bypass the diagnostic routine
during power up. After triggering an abort , the board is in diagnostic mode and the
OpenBoot ok prompt appears. In this mode, you can diagnose what caused the
program to hang. However, the board is not fully initialized and therefore is not fully
functional. To regain the full functionality, you need to trigger a reset.
Connectors
4
a
The board provides the following connectors at its front panel:
S Serial
SPARC/CPU−56T 59
Page 60

Controls, Indicators, and Connectors Front Panel
S Keyboard/Mouse
S Ethernet
S SCSI
Serial I/O
Two serial RS−232 interfaces A and B are available via two Mini D−Sub 9 connectors.
Their pinouts are given below.
a
SERA_DSR
6
SERA_RTS
7
SERA_CTS
8
SERA_RI
9
Figure 5: Serial A Connector Pinout
SERB_DSR
6
SERB_RTS
7
SERB_CTS
8
SERB_RI/5V
9
Figure 6: Serial B Connector Pinout
The signal provided by pin 9 of serial interface B depends on the value of the OpenBoot
variable tty−rs422−enable?. If it is set to true, pin 9 holds 5V and serves as power feed for
the ACC/CABLE/RS−422 cable connected to this interface. If the OpenBoot variable
tty−rs422−enable? is set to false, pin 9 holds the signal SERB_RI and the serial interface B
is a standard RS−232 interface.
Keyboard/Mouse
A SUN−type keyboard/mouse can be connected via an 8−pin Mini DIN connector. Its
pinout is given below.a
GND
1
+5V DC
3
Keyboard Out
5
Mouse Out
7
Figure 7: SUN−Type Keyboard/Mouse Connector Pinout
6
9
6
9
1
5
1
5
SERA_DCD
SERA_RXD
SERA_TXD
SERA_DTR
GND
SERB_DCD
SERB_RXD
SERB_TXD
SERB_DTR
GND
1
2
3
4
5
1
2
3
4
5
a
1
2
3
6
4
5
8
7
GND
Mouse In
Keyboard In
Sense (+5V DC)
2
4
6
8
a
If you use an PS/2 splitter adapter cable, two PS/2 interfaces are available. One PS/2
interface can be used for connecting a keyboard, the second for connecting a mouse. Their
respective pinouts are given below.
2
1
Keyboard Data
1
GND
3
Keyboard Clock
5
3
5
Figure 8: PS/2 Keyboard Connector Pinout
60 SPARC/CPU−56T
4
6
a
n.c.
2
Vcc
4
n.c.
6
Page 61

Front Panel Controls, Indicators, and Connectors
2
1
Mouse Data
1
GND
3
Mouse Clock
5
3
5
4
6
n.c.
Vcc
n.c.
2
4
6
Figure 9: PS/2 Mouse Connector Pinout
Ethernet
Ethernet 1 and 2 are available via two RJ−45 connectors. Ethernet 1 is of type 10/100BaseT
and Ethernet 2 of type 10/100/1000BaseT. The respective pinouts are given below.
ETH1_TX+
1
ETH1_TX−
2
ETH1_RX+
3
NC
4
NC
5
ETH1_RX−
6
NC
7
NC
8
Figure 10: Ethernet 1 Connector Pinout
ETH2_MDI0+
1
ETH2_MDI0−
2
ETH2_MDI1+
3
ETH2_MDI2+
4
ETH2_MDI2−
5
ETH2_MDI1−
6
ETH2_MDI3+
7
ETH2_MDI3−
8
Figure 11: Ethernet 2 Connector Pinout
1
8
1
8
a
Note:aThe Ethernet 1 interface is also accessible as Ethernet 3 via the IOBP−CPU−56 .
Both interfaces can not be accessed at the same time. The selection is made
automatically by OpenBoot when booting the board and cannot be reversed anymore
until the board is rebooted.
a
SCSI
Two SCSI interfaces 1 and 2 are available via two mini 68−pole SCSI4 connectors. Their
pinout is given below.
SPARC/CPU−56T 61
a
Page 62

Controls, Indicators, and Connectors Front Panel
SCSIx_D12+
1
SCSIx_D13+
2
SCSIx_D14+
3
SCSIx_D15+
4
SCSIx_DP1+
5
SCSIx_D0+
6
SCSIx_D1+
7
SCSIx_D2+
8
SCSIx_D3+
9
SCSIx_D4+
10
SCSIx_D5+
11
SCSIx_D6+
12
SCSIx_D7+
13
SCSIx_DP0+
14
GND
15
DIFFSENSE
16
TERMPWR
17
TERMPWR
18
n.c.
19
GND
20
SCSIx_ATN+
21
GND
22
SCSIx_BSY+
23
SCSIx_ACK+
24
SCSIx_RST+
25
SCSIx_MSG+
26
SCSIx_SEL+
27
SCSIx_CD+
28
SCSIx_REQ+
29
SCSIx_IO+
30
SCSIx_D8+
31
SCSIx_D9+
32
SCSIx_D10+
33
SCSIx_D11+
34
135
34 68
Figure 12: SCSI 1/2 Connector Pinouts
SCSIx_D12−
SCSIx_D13−
SCSIx_D14−
SCSIx_D15−
SCSIx_DP1−
SCSIx_D0−
SCSIx_D1−
SCSIx_D2−
SCSIx_D3−
SCSIx_D4−
SCSIx_D5−
SCSIx_D6−
SCSIx_D7−
SCSIx_DP0−
GND
GND
TERMPWR
TERMPWR
n.c.
GND
SCSIx_ATN−
GND
SCSIx_BSY−
SCSIx_ACK−
SCSIx_RST−
SCSIx_MSG−
SCSIx_SEL−
SCSIx_CD−
SCSIx_REQ−
SCSIx_IO−
SCSIx_D8−
SCSIx_D9−
SCSIx_D10−
SCSIx_D11−
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
Note:aBy default the SCSI termination is switched ON for SCSI interface 1 and 2. It
can be switched OFF via switches. For details, see section Switch Settings".
62 SPARC/CPU−56T
Page 63

On−Board Connectors Controls, Indicators, and Connectors
On−Board Connectors
The following connectors are on−board:
S PMC
S Memory module
S IDE
S VME
PMC
The I/O board provides the following PMC connectors:
PMC Connectors Corresponding PMC Slot
Pn31 − Pn33 PMC #4
Pn21 − Pn24 PMC #3
Pn11 − Pn13
PMC#4 PMC#3 PMC#2
Figure 13: Location of PMC Connectors
PMC #2
The connectors corresponding to PMC slots 2 and 4 are standard and are therefore not
described in this guide.
a
The PMC connectors corresponding to PMC slot 3 provide the additional connector
Pn24.
a
SPARC/CPU−56T 63
Page 64

Controls, Indicators, and Connectors On−Board Connectors
Pn24
642
1
63
PMC#3
It carries user I/O signals that are routed to the I/O board′ s IOBP. There they are
available via an on−board PMC connector. For details, refer to the
Installation Guide.
a
aSPARC/IOBP−IO−56
The pinout of Pn24 is given below.a
PMC2_IO1
1
PMC2_IO2
3
PMC2_IO3
5
PMC2_IO4
7
PMC2_IO5
9
PMC2_IO6
11
PMC2_IO7
13
PMC2_IO8
15
PMC2_IO9
17
PMC2_IO10
19
PMC2_IO11
21
PMC2_IO12
23
PMC2_IO13
25
PMC2_IO14
27
PMC2_IO15
29
PMC2_IO16
31
PMC2_IO17
33
PMC2_IO18
35
PMC2_IO19
37
PMC2_IO20
39
PMC2_IO21
41
PMC2_IO22
43
PMC2_IO23
45
PMC2_IO24
47
PMC2_IO25
49
PMC2_IO26
51
PMC2_IO27
53
PMC2_IO28
55
PMC2_IO29
57
PMC2_IO30
59
PMC2_IO31
61
PMC2_IO32
63
Figure 14: PMC I/O Connector Pn24 Pinout
PMC2_IO33
PMC2_IO34
PMC2_IO35
PMC2_IO36
PMC2_IO37
PMC2_IO38
PMC2_IO39
PMC2_IO40
PMC2_IO41
PMC2_IO42
PMC2_IO43
PMC2_IO44
PMC2_IO45
PMC2_IO46
PMC2_IO47
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
n.c.
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
50
52
54
56
58
60
62
64
Memory Module
The CPU board provides the memory module connectors P8 and P9.a
64 SPARC/CPU−56T
Page 65

On−Board Connectors Controls, Indicators, and Connectors
P8
P9
Figure 15: Location of Memory Module Connectors
IDE
The CPU board provides one IDE connector which provides access to IDE1.a
IDE Connector
1
Its pinout is given below.a
SPARC/CPU−56T 65
Page 66

Controls, Indicators, and Connectors On−Board Connectors
VME
IDE1_RST#
1
IDE1_D7
3
IDE1_D6
5
IDE1_D5
7
IDE1_D4
9
IDE1_D3
11
IDE1_D2
13
IDE1_D1
15
IDE1_D0
17
GND
19
IDE1_DREQ
21
IDE1_IOW#
23
IDE1_IOR#
25
27
IDE1_IORDY
29
IDE1_DACK#
31
IDE1_INT
33
IDE1_A1
35
IDE1_A0
39
IDE1_CS0#
40
IDE1_ACT#
41
5V
43
GND
GND
IDE1_D8
IDE1_D9
IDE1_D10
IDE1_D11
IDE1_D12
IDE1_D13
IDE1_D14
IDE1_D15
KEY
GND
GND
GND
IDE1_CSEL
GND
n.c.
IDE1_CBLID#
IDE1_A2
IDE1_CS1#
GND
5V
n.c.
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
Figure 16: IDE Connector Pinout
Both the CPU board and the I/O board provide the VME connectors P1 and P2.a
P1
P2
Figure 17: Location of VME Connectors
CPU Board
P1 carries standard VME signals and is therefore not further described in this guide.
66 SPARC/CPU−56T
Page 67

On−Board Connectors Controls, Indicators, and Connectors
P2 carries the following Force Computers specific signals:a
S 10/100Mbit Ethernet 3 (ETH3)
S IDE (IDE2)
S Parallel (PAR)
S Serial (SERC, SERD)
S USB 1 and 2 (USB1, USB2)
S 10/100/1000 Mbit Ethernet 4 (ETH4)
S Floppy (FDC)
S USB 3 and 4 (USB3, USB4)
S SUN or PS/2 keyboard/ mouse interface (KBD)
S I2C (SMB)
Figure 18: CPU Board P2 VMEbus Connector Pinout Rows Z − B
SPARC/CPU−56T 67
Page 68

Controls, Indicators, and Connectors On−Board Connectors
I/O Board
Figure 19: CPU Board P2 VMEbus Connector Pinout Rows C + D
P1 carries standard VME signals and is therefore not further described in this guide.
P2 connector carries standard VME signals as well as the following Force Computers
specific signals:
a
S Sound (AC97_)
S SCSI 3 (SCSI3_)
S PMC3 (PMC3_)
a
68 SPARC/CPU−56T
Page 69

On−Board Connectors Controls, Indicators, and Connectors
Figure 20: I/O Board P2 VMEbus Connector Pinout Rows Z – B
SPARC/CPU−56T 69
Page 70

Controls, Indicators, and Connectors On−Board Connectors
Figure 21: I/O Board P2 VMEbus Connector Pinout Rows C + D
70 SPARC/CPU−56T
Page 71

4
Devices’ Features and Data Paths
Block Diagram 73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UltraSPARC IIi+ Processor 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interrupt Controller 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI Bus A 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Controller 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI Controller 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SENTINEL64 PCI−to−PCI Bridge 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI−to−VME Bridge 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI Bus B 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Controller 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Southbridge 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCIO−2 Controller 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EBus Interface 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Media Independent Interface 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
USB Interfaces 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EBus 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FPGA 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Watchdog 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Timer 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Temperature Sensor Control 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Local I2C Interface 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Interface 1/3 Switching 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LED and Switch Control 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reset Control 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PLCC PROM and Flash Memory Device 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 71
Page 72

Real−Time Clock and NVRAM 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Serial Controller 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PCI Bus C 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72 SPARC/CPU−56T
Page 73

Block Diagram Devices’ Features and Data Paths
Block Diagram
Figure 22: CPU Board Block Diagram
SPARC/CPU−56T 73
Page 74

Devices’ Features and Data Paths Block Diagram
Figure 23: I/O Board Block Diagram
74 SPARC/CPU−56T
Page 75

UltraSPARC IIi+ Processor Devices’ Features and Data Paths
UltraSPARC IIi+ Processor
The UltraSPARC IIi+ processor is based on the SPARC V9 architecture with VIS
instruction set and supports up to 4 GByte of memory. Important features are:
S 650 MHz frequency
S Four−way superscalar processor
S 64−bit data paths
S 64−bit address arithmetic
S 41−bit virtual addressing
S 16 KByte instruction cache
S 16 KByte non−blocking primary data cache
S 512 KByte second level cache
S Sensors for observing CPU on−die temperature
SPARC/CPU−56T 75
Page 76

Devices’ Features and Data Paths Interrupt Controller
Interrupt Controller
The UltraSPARC−IIi+ provides a 6−bit wide interrupt vector for 63 interrupt sources.a
The UPA interrupt concentrator (UIC) provides the inputs for all necessary interrupts. It
monitors all interrupts using a round−robin scheme with 33 MHz, converts them to a
device−own vector and transmits this vector to the processor. The PCI interrupts engine
(PIE) reflects every vector in one state bit. From the state bit a new vector is generated and
transmitted to the processor′s execution unit. If more than one interrupt state bit is active,
the transmitting sequence of the new interrupt vector is priority controlled.a
Every interrupt routed to the interrupt controller can be enabled or disabled separately in
the interrupt source and in the processor.
a
76 SPARC/CPU−56T
Page 77

PCI Bus A Devices’ Features and Data Paths
PCI Bus A
PCI bus A is the primary PCI bus. It runs at 33 MHz and is 32 bit wide. The following
devices are connected to it:
S Ethernet controller
S SCSI controller
S SENTINEL64 PCI−to−PCI bridge
S Universe
Ethernet Controller
The used Ethernet controller is an Intel 82540. It corresponds to Ethernet interface 2
available via the front panel and supports 10/100/1000BaseT Ethernet. Further important
features are:
S Integrated PHY in a small package (uBGA196)
S Compatibility with IEEE 802.3/Ethernet
S DMA capability
S Interrupt generation
SCSI Controller
The used SCSI controller is a LSI53C1010. It supports two dual U2W LVD SCSI buses with
a SCSI data transfer rate of up to 160 MByte/s for each channel. Both SCSI interfaces are
available via the front panel.
Two interrupts are generated by the SCSI controller for interrupting the main processor.a
Both SCSI interfaces have an on−board termination which can be enabled and disabled
via on−board switches. By default, the SCSI termination is enabled.
a
SENTINEL64 PCI−to−PCI Bridge
The SENTINEL64 PCI−To−PCI bridge is used to connect the primary PCI bus A to the
secondary PCI bus B. For details about the SENTINEL64 device refer to the SENTINEL64
Reference Guide available via the Force Computers S.M.A.R.T. server.
PCI−to−VME Bridge
a
a
The used PCI−To−VME bridge is a Tundra Universe II device. Its main features are:
S Fully compliant to VME64 bus standard
SPARC/CPU−56T 77
Page 78

Devices’ Features and Data Paths PCI Bus A
S Integral FIFOs for write posting to maximize bandwidth utilization
S Programmable DMA controller with linked−list mode
S CPU or peripheral boards functioning as both master and slave in the
S Sustained transfer rates up to 60−70 Mbytes/s
Note:aWhen operating the board in system slot 1, the system clock is disabled while
the board is in reset. This is a limitation of the Universe II device.
a
78 SPARC/CPU−56T
Page 79

PCI Bus B Devices’ Features and Data Paths
PCI Bus B
PCI bus B runs at 33 MHz and is 64 bit wide. It is the secondary PCI bus of the CPU board
and has the following devices attached to it:
S Ethernet controller
S Southbridge
S PCIO−2 controller
S PMC module
Ethernet Controller
The Ethernet controller used at PCI bus B is the same as is used at PCI bus A.a
Southbridge
The used Southbridge is an ALI M1535D+. It provides the following interfaces:
S Two IDE channels with ATA−100
S Parallel interface
S Floppy disk interface
S PS/2 keyboard/mouse interface
a
S SUN keyboard/mouse interface via two serial interfaces
PCIO−2 Controller
The used PCIO−2 controller is a SUN SME2300. It is a single−chip I/O subsystem using a
single PCI load and providing the following interfaces:
S Expansion bus (EBus) interface
S Four USB interfaces
S Media Independent Interface (MII)
EBus Interface
The PCIO−2 controller acts as EBus controller of the attached EBus. A description of all
devices attached to the EBus is given below.
SPARC/CPU−56T 79
a
Page 80

Devices’ Features and Data Paths PCI Bus B
Media Independent Interface
Two on−board Intel LXT971 PHY devices are connected to the MII. They transform the
MII into a 10/100BaseT Ethernet interface which is available either via front panel or via
IOBP.
a
Important features of the PHY device are:
S Support for ISO/IEC 8802−3 Ethernet
S Support for Shielded Twisted Pair (STP) and Unshielded Twisted Pair (UTP)
category−5 cables of up to 100 meters length
S Operation in half−duplex and full−duplex mode possible
S Speed adjustion either manually or via auto−negotiation
USB Interfaces
Four USB channels are provided with each channel supporting 1.5 MBit/s and 12 MBit/s.
All USB interfaces provide auto resume from power managed (suspended) state.
a
The USB interfaces 1, 2 and 3 are routed to the CPU board′s IOBP where they are available
via three front connectors. USB interface 4 is unused.
a
The USB interfaces provide the host controllers for USB transfers and a four−port
integrated hub. The host controller manages the control and data flow. It also provides
connection management and provides status information. The hub enables tiered star
topology to provide multiple connections.
a
80 SPARC/CPU−56T
Page 81

EBus Devices’ Features and Data Paths
EBus
The EBus is a generic slave 8−bit wide Direct Memory Access (DMA) bus (pseudo ISA
bus) to which the following devices are connected:
S Field−Programmable Gate Array (FPGA)
S PLCC PROM and flash memory device
S Real time clock and NVRAM
S Quad serial controller
FPGA
The used FPGA is a Spartan XCS20XL device made by XILINX. It provides the following
main features:
Watchdog
S Watchdog
S Timer
S Temperature sensor control
2
S Two local I
C interfaces
S Ethernet interface 1/3 switching
S LED and switch control
S Reset control
The CPU board′s watchdog is implemented inside the FPGA. It is used to reset the board
after a configured time, if no software trigger occurred. If enabled in the Interrupt Enable
Control register, an interrupt will be generated before the watchdog timer runs out.
a
The watchdog can be enabled by setting SW1−3 to ON. It starts with the first trigger of the
watchdog trigger bit in the Watchdog Trigger register. After the watchdog was started, it
is not possible to stop it anymore.
a
The Watchdog Timer Control Register allows to specify the time after which an interrupt
is generated and after which a reset is issued. For both, values between 125 ms up to 1
hour in 15 steps are possible. The value of each following step is increased by a factor of
between 1.5 and 3. To be compatible to the predecessor board SPARC/CPU−54, the time
after which a reset is issued after a reset is set to 2.5 s and the time after which an
SPARC/CPU−56T 81
Page 82

Devices’ Features and Data Paths EBus
interrupt is generated is set to 1.25s. Once the watchdog timer is running, it is only
possible to reduce the watchdog run out time.
a
Timer
The FPGA contains two timers which can be used as two independent 16−bit count−down
timers with a timer interval of 10 µs and a maximum run−out time of 655.35 ms. Two
independent interrupts are possible which can be enabled or disabled with the Interrupt
Enable Control register. One counter read−back register set is also available which shows
the correct timer values.
a
Both timers can be combined to run as one 32−bit count−down timer with a timer interval
of 10 µs and a total run−out time of 42949.67295 s (or 11 h, 55 min, 49 s and 672.95 ms). In
this mode only one interrupt is possible.
a
The timer counts down from its initial value to zero in steps of 10 µs. The initial value can
be set by software from 1 to 65535 in 16−bit mode or from 1 to 4294967295 in the 32−bit
mode, which results in a timer period of 10 µs to 655.35 ms in the 16−bit mode or of 10 µs
to 42949.67295s in the 32−bit mode. If the timer has reached zero, an interrupt is
generated, if enabled, and the timer loads its initial value to count down again.
A detailed description of all registers related to the timers is given in the chapter "Maps
and Registers".
a
Temperature Sensor Control
The on−board temperature sensor device MAX1617 measures the temperatures of the
CPU board and the CPU. If the measured temperatures is not within a pre−defined range
between lower and upper temperature, bit 2 is set in the External Failure Register and, if
enabled, an interrupt is generated.
Local I2C Interface
2
Two separate I
C buses are available on the CPU board. Both are implemented in the
Xilinx FPGA and have the following devices attached to them:
S Serial Presence Detects (SPDs)
S On−board temperature sensor
S Board Information Blocks (BIBs)
BIBs are used for internal purposes only and are therefore not further described in this
guide. All other devices are I2C bus slaves and are identified by unique addresses which
are given in the table below.
Device I2C Bus I2C Bus Slave Address
Temperature sensor MAX1617 2 0011.000
SPD CPU−56 PROM Bank 1−4 24C04 Serial E2PROM 2 1010.00x
SPD MEM−550 PROM Bank 1−4 24C04 Serial E2PROM 2 1010.01x
a
a
2
2
2
82 SPARC/CPU−56T
Page 83

EBus Devices’ Features and Data Paths
Ethernet Interface 1/3 Switching
As mentioned earlier in this guide, Ethernet interface 1 is available via front panel and
Ethernet interface 3 via the CPU board′s IOBP. Only one of both interfaces can be active at
the same time.
a
The selection which interface is active is made at board reset by the FPGA′s internal logic.
It depends on the Miscellaneous Control Register bits 5 to 7 and on which Ethernet
interface provides a link. The Miscellaneous Control Register is set by OpenBoot while
booting the board. For information on how to change the default setting, refer to
aSPARC/CPU−56(T) OpenBoot Enhancements Programmer4s Guidea which is available via
the
the Force Computers S.M.A.R.T. service.
By default, the selection is made as described in the following table.
Link at Interface 1a Link at Interface 3 Activated Ethernet Interface
Ye s Ye s 1
Ye s N o 1
No Yes 3
No
LED and Switch Control
The FPGA internal logic is responsible for:
S Control of front panel LEDs
S Readback of switches SW1−4
Reset Control
The FPGA handles all resets and distributes them to the CPU. Possible reset sources are
listed in the following table.
Table 12: Reset Sources
a
No 1
a
Reset Source
Watchdog reset On expiry, the watchdog timer can generate a
Front panel key Depending on the time the key is pressed, either a
Two−pin connector on CPU board′s IOBP By shortcutting this connector a reset is issued
VMEbus
SPARC/CPU−56T 83
Description
reset.a
reset or a board abort is issued
Two directions are possible: the VMEbus resets the
CPU board or the CPU board resets the VME bus
Page 84

Devices’ Features and Data Paths EBus
Reset Source Description
Power−up reset If one or more on−board voltages are not within
their thresholds, a reset is issued
PMC reset A PMC module in non−monarch mode can reset
the CPU board
PLCC PROM and Flash Memory Device
The following memory devices are connected to the EBus:
S One PLCC PROM with 1 MByte address space
S One flash memory device with 16 MByte address space
The PLCC PROM is the device from which the CPU board boots by default.
The 16 MByte flash memory device can be used as:
S User flash memory of 16 MBytes
S Boot flash memory of 1 MByte with the remaining 15 MBytes used as user flash
memory
The selection between both operation modes is made via on−board switches.
Whether to boot from the PLCC PROM or the flash memory device, is determined by
switch SW1−2. After booting, the whole PLCC PROM is switched off, regardless of the
position of switch SW 1−2. Switch SW1−1 is used to enable write−protection of the flash
memory device. If this switch is OFF (default), the flash memory device is
write−protected. In order to copy the PLCC PROM content to the flash memory device,
switch SW1−1 must be switched ON and switch SW1−2 must be set to OFF.
Real−Time Clock and NVRAM
The CPU board provides the M48T35AV with an real−time clock (RTC) and a non−volatile
RAM (NVRAM) which offers the following features:
a
a
a
S 32 KByte ultra−low power CMOS SRAM
S Byte−wide accessible real−time clock
a
S Long−life lithium carbon mono fluoride battery
S Year−2000 compliant RTC with own crystal
Serial Controller
The CPU board provides four independent full−duplex serial I/O interfaces. They are
implemented via the Quad Enhanced Serial Communication Controller 16C554 by Texas
Instruments.
84 SPARC/CPU−56T
Page 85

EBus Devices’ Features and Data Paths
The device offers the following features:
S Four independent full−duplex serial channels
S Four independent baud rate generators
S Hardware handshake support (RTS/CTS/DTR/DTS/RI/DCD)
S Interrupt controlled
Interface 1 and 2 are available on the front panel via two micro DSub connectors. The
interfaces 3 and 4 are routed to the SPARC/IOBP−CPU−56 via the P2 connector.
a
SPARC/CPU−56T 85
Page 86

Devices’ Features and Data Paths PCI Bus C
PCI Bus C
PCI Bus C has the following devices attached to it:
S SENTINEL64 PCI−To−PCI bridge
S PMC#2 (PMC slot 3) providing 64 bit/66 MHz
S PMC#3 (PMC slot 4) providing 64 bit/66 MHz
S SCSI device Ultra 160−LVD supporting 64 bit/66 MHz
The data width provided by PCI bus C is 64 bit. The bus speed depends on the PMC
modules installed into slot 3 and 4. If no PMC modules are installed or only PMC
modules which support 66 MHz, the bus speed is 66 MHz. In all other cases the bus speed
is 33 MHz.
a
86 SPARC/CPU−56T
Page 87

5
OpenBoot Firmware
Introduction 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CORE 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CORE Workflow 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CORE Commands 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
POST 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OpenBoot 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Optional Boot Parameters 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Boot Devices 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OBDIAG 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Executing OBDIAG 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Terminating OBDIAG 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OBDIAG Commands 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VxWorks Support 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
NVRAM Boot Parameters 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagnostics 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SCSI Bus 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
All SCSI Buses 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Single Device 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Group of Devices 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Clock 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Network 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IDE Devices 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Displaying System Information 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ethernet Address and Host ID 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ID PROM 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resetting the System 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Activating OpenBoot Help 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SPARC/CPU−56T 87
Page 88

OpenBoot Firmware Introduction
Introduction
The OpenBoot firmware consists of the Common Operations and Reset Environment
(CORE), the power−on selftest (POST), the OpenBoot Diagnostics (OBDIAG), and the
OpenBoot itself as well as support for the VxWorks real−time operating system (RTOS).
The OpenBoot firmware is subject to changes. For the newest version and how to
upgrade, refer to the SMART service accessible via the Force Computers World Wide Web
site (www.forcecomputers.com).
Note:aThe appearance of the on−screen output shown in the examples can differ from
the appearance of the output on your monitor according to your device tree (CPU
architecture).
For more information on the OpenBoot firmware, see theaOpenBoot 4.x Manual Set.
CORE
CORE is responsible for setting up proper environments for booting purposes. It first
initializes the system to a status where different firmware can be loaded from.
a
CORE automatically transfers control to its clients (such as OpenBoot, VxWorks, Chorus
Booter...) during power up.
a
Furthermore, it provides a unified interface for using public CORE functions. Thus, the
CORE unifies system initialization and minimizes modifications within the upper level
firmware.
a
The following figure gives a system overview of which systems are initialized by CORE.
Running from
PROM
Running from
Memory
Operating
System
FVM
Solaris
Basic System Initialization
CORE with bPOST
Basic
Loader
Basic OS
BSP
VxWorks
RTOS
cPOST
Figure 24: OpenBoot CORE Overview
88 SPARC/CPU−56T
Page 89

Introduction OpenBoot Firmware
Additionally, CORE is designed to reach the following goals:
S Ability to use I/O devices including serial port, flash, floppy, and net early on the cold
boot sequence of a firmware client.a
S Basic system tests that can replace existing POST in min. mode.
S System testing may be done using the POST drop−in in max. mode.
S Error recovery from exceptions which currently do not exist in OpenBoot and from
any fatal conditions during flash update
S Developing standard validation test suites that could prevent major bugs in CORE
and clients
S Sample client codes that could facilitate any client porting
CORE Workflow
The following figure describes the workflow of CORE.
YES
FALSE
MIN
Power−On Switch
Control+P
NO
<diag−switch?>
TRUE
bPOST
<diag−level>
MAX
Control+U
NO
user−interface
FALSE
cPOST
(Client)
Control+U
NO
Client
YES
TRUE
YES
CORE
User Interface
NO
If no activity
detected for 10 sec.
YES
SPARC/CPU−56T 89
Page 90

OpenBoot Firmware Introduction
CORE Commands
In order to change or interrupt the boot process in CORE, the following commands can be
executed:
S Skip POST: <Control>+<P>
S Enter user interface: <Control>+<U>
S User default NVRAM variables for this run: <Control>+<N>a
S Turn−on messages (if <diag−switch> is set to true): <Control>+<M>a
POST
At hardware power−on or button power−on, the CORE firmware executes POST if the
NVRAM configuration parameter <diag−switch?> was set to true beforehand. The extents
of certain tests executed within in the POST depend on the state of the configuration
parameter <diag−level>.
You choose between minimal or maximal testing by setting this configuration parameter
to min or max. If the NVRAM configuration parameter <diag−switch?> is true for each
test, a message is displayed on a terminal connected to the serial I/O interface A.
If the system does not work correctly, error messages will be displayed which indicate the
problem. After POST, the OpenBoot firmware boots an operating system or enters the
Forth monitor, if the NVRAM configuration parameter <auto−boot?> is false.
OpenBoot
a
a
a
Booting the system is the most important function of the OpenBoot firmware.
Booting is the process of loading and executing a stand−alone program such as the
operating system. After the system is powered on, it usually boots automatically after it
has passed POST which occurs without user intervention.
a
If necessary, you can explicitly initiate the boot process from the OpenBoot command
prompt. Automatic booting uses the default boot device specified in the nonvolatile RAM
(NVRAM). User−initiated booting either uses the default boot device or one specified by
the user.
a
In order to boot the system from the default boot device with default settings, enter the
following command at the Forth monitor prompt ok:
okaboot
The boot command has the following format:
90 SPARC/CPU−56T
Page 91

Introduction OpenBoot Firmware
boot <device−specifier> <filename> <−bootoption>
Optional Boot Parameters
Table 13: Boot Parameters
Parameter Description
<device−specifier> Name (full path or alias) of the boot device. Typical values are
cdrom, disk, floppy, net or tape.
<filename> Name of program to be booted
The filename parameter is relative to the root of the selected
device. If no filename is specified, the boot command uses the
value of the boot file NVRAM parameter. The NVRAM
parameters used for booting are described in the following
section.a
<−bootoption>
Boot Devices
To explicitly boot from the internal disks using the Forth Monitor, enter:
okaboot disk
or
okaboot disk−2
To retrieve a list of all device alias definitions, enter at the Forth Monitor command
prompt:
devalias
The following table lists device aliases available for SCSI devices.a
Table 14: OpenBoot Aliases for SCSI Devices
Alias
Bootoption may be one of the following:a
−a: Prompts interactively for device and name of boot file
−h: Halts after loading program
−r: Reconfigures Solaris device drivers after changing
hardware configuration
−v: Prints verbose information during boot procedure
SCSI Devicea SCSI Interface
disk Disk SCSI−target−ID 0 1
diskf Disk SCSI−target−ID f 1
diske Disk SCSI−target−ID e 1
diskd
SPARC/CPU−56T 91
Disk SCSI−target−ID d 1
Page 92

OpenBoot Firmware Introduction
Alias SCSI InterfaceSCSI Devicea
diskc Disk SCSI−target−ID c 1
diskb Disk SCSI−target−ID b 1
diska Disk SCSI−target−ID a 1
disk9 Disk SCSI−target−ID 9 1
disk8 Disk SCSI−target−ID 8 1
disk7 Disk SCSI−target−ID 7 1
disk6 Disk SCSI−target−ID 6 1
disk5 Disk SCSI−target−ID 5 1
disk4 Disk SCSI−target−ID 4 1
disk3 Disk SCSI−target−ID 3 1
disk2 Disk SCSI−target−ID 2 1
disk1 Disk SCSI−target−ID 1 1
disk0 Disk SCSI−target−ID 0 1
tape (or tape0)a First tape drive SCSI−target−ID 4 1
tape1 Second tape drive
SCSI−target−ID 5
cdrom CD−ROM partition f,
SCSI−target−ID 6
scsi−2 SCSI 2 2
disk−2 Default disk SCSI−target−ID 0 2
disk2f Disk SCSI−target−ID f 2
disk2e Disk SCSI−target−ID e 2
disk2d Disk SCSI−target−ID d 2
disk2c Disk SCSI−target−ID c 2
disk2b Disk SCSI−target−ID b 2
disk2a Disk SCSI−target−ID a 2
disk29 Disk SCSI−target−ID 9 2
disk28 Disk SCSI−target−ID 8 2
disk27 Disk SCSI−target−ID 7 2
1
1
disk26 Disk SCSI−target−ID 6 2
disk25
92 SPARC/CPU−56T
Disk SCSI−target−ID 5 2
Page 93

Introduction OpenBoot Firmware
Alias SCSI InterfaceSCSI Devicea
disk24 Disk SCSI−target−ID 4 2
disk23 Disk SCSI−target−ID 3 2
disk22 Disk SCSI−target−ID 2 2
disk21 Disk SCSI−target−ID 1 2
disk20 Disk SCSI−target−ID 0 2
tape−2 (or tape20)a First tape drive SCSI−target−ID 4 2
tape21 Second tape drive
SCSI−target−ID 5
cdrom−2
CD−ROM partition f,
SCSI−target−ID 6
2
2
The following table lists device aliases available for other devices.a
Table 15: OpenBoot Aliases for Miscellaneous Devices
Alias
cdrom−3 CD−ROM partition f, on−board IDE secondary master
disk−3 Disk, on−board IDE primary master
disk33 Disk, on−board IDE secondary slave
disk32 Disk, on−board IDE secondary master
disk31 Disk, on−board IDE primary slave
disk30 Disk, on−board IDE primary master
ide on−board IDE
ebus EBus
flash Flash EPROM
flash−proga Flash EPROM programming mode
Device
floppy Floppy disk
keyboarda Keyboard
mouse Mouse
net Ethernet 1 interface via front panel
net2 Ethernet interface 2
net3 Ethernet 3 interface via IOBP
pci Primary PCI bus
ttya
SPARC/CPU−56T 93
Serial interface A
Page 94

OpenBoot Firmware Introduction
Alias Device
ttyb Serial interface B
tyyc Serial interface C
tyyd Serial interface D
vme
OBDIAG
OBDIAG stands for OpenBoot Diagnostics and is an additional diagnostics drop−in driver
program which serves as an NVRAM configuration feature.
It allows to test the hardware by calling OBDIAG when the OpenBoot firmware is present
and the <ok> prompt has appeared. During the start−up sequence of the CPU, OpenBoot
searches for the presence of devices on all expansion buses and evaluates their
characteristics such as device ID, device type, vendor ID, and revision ID. In order to test
the hardware, OBDIAG requires selftest methods for the discovered devices. If OBDIAG
does not find any selftest methods in the device nodes, it looks for its own selftest
methods.
Executing OBDIAG
There are two different methods to execute OBDIAG:
a) Via Script
b) Manually
VME
a
a
Via Script
In order to execute OBDIAG via script, set two configuration variables by enterring:
setenv mfg−mode chamber
setenv diag−switch? true
Now a script of additional diagnostic tests is executed automatically after each POST from
OBDIAG provided that POST has been running without failure during hardware power
on.
Manually
In order to execute OBDIAG manually, enter the following command at the ok prompt:
obdiag
94 SPARC/CPU−56T
Page 95

Introduction OpenBoot Firmware
When OBDIAG is called, the <obdiag> test prompt appears and you can now choose the
required test. You can run single tests, a number of tests, all tests, or all tests with
exceptions. If the test has passed successfully, a short test comment will appear on screen.
In order to return to the main menu, hit the enter key.
Terminating OBDIAG
In order to terminate OBDIAG and return to OpenBoot, enter
exit
a
The OpenBoot prompt will then reappear.a
OBDIAG Commands
Apart from testing the hardware, you can also call several commands which can be seen
in the ODBIAG main menu. The following table provides an overview of these
commands.
a
Table 16: OBDIAG Commands
Commanda Descriptiona
exit Exits obdiag tool
help Prints this help information
setenv Sets diagnostic configuration variable to new value
printenvs Prints values for diagnostic configuration variables
versions Prints selftests, library, and obdiag tool versions
test−all Tests all devices displayed in the main menu
test 1,2,5 Tests devices 1, 2, and 5
except 2,5 Tests all devices except for devices 2 and 5
what 1,2,5
Prints some selected properties for devices 1, 2, and 5
OBDIAG provides a brief excerpt of the OpenBoot configuration variables. The values of
the variables are displayed after entering the following command:
printenvs
You can decide whether the chosen test will either stop at the occurrence of the first error
or continue to test the hardware. It is also possible to run the test more than once or
produce a detailed print−out of the test.
The example below shows the detailed print out of an OBDIAG test.
a
Example:a
SPARC/CPU−56T 95
Page 96

OpenBoot Firmware Introduction
obdiag>asetenv diag−verbosity 2aa
diag−verbosity =aaaaaa2
aa
Hit any key to return to the main menua<cr>
aa
obdiag>asetenv diag−continue? 0
diag−continue? =aaaaaa0
aa
Hit any key to return to the main menuaa<cr>
aa
obdiag>atest 2
Hit the spacebar to interrupt testing
Testing /pci@1f,0/ebus@1a
SUBTEST: vendor−id−test
SUBTEST: device−id−test
SUBTEST: mixmode−read
SUBTEST: e2−class−test
SUBTEST: status−reg−walk1
SUBTEST: line−size−walk1
SUBTEST: latency−walk1
SUBTEST: line−walk1
SUBTEST: pin−test
SUBTEST: dma−reg−test
SUBTEST: dma−func−test
Selftest at /pci@1f,0/ebus@1 .................................... passed
aa
Hit any key to return to the main menuaa<cr>
obdiag>aexit <cr>
ok
VxWorks Support
ThePLCC PROM delivered together with the CPU board contains support for the
real−time operating system VxWorks 5.4 from WindRiver Systems. A VxWorks booter,
bootrom.hex" image, is provided as dropin named bootrom". In order to execute it,
enter at the CORE command prompt;
execute bootrom
To automatically start the VxWorks booter at power up, enter:
set kernel bootrom
96 SPARC/CPU−56T
Page 97

NVRAM Boot Parameters OpenBoot Firmware
NVRAM Boot Parameters
The OpenBoot firmware holds its configuration parameters in NVRAM. To see a list of all
available configuration parameters, enter at the Forth Monitor prompt:
As you can see in the list, the default setting is for the CPU board to boot the operating
system automatically. If this is not the case, ensure that the <auto−boot?> parameter is set
to true.
aprintenv
To set specific parameters, use the setenv command as follows:
<configuration_parameter> <value>
asetenv
The configuration parameters in the following table are involved in the boot process.
Table 17: OpenBoot Configuration Parameters
Parameter Default Value Description
auto−boot? true If true, automatic booting after power on or reset
boot−device disk Device from which to boot
boot−file empty string File to boot
diag−switch? false If true, run in diagnostic mode, test results are
shown, boot up takes longer
If false, normal mode, short boot up
diag−device net Device from which to boot in diagnostic mode
diag−file
empty string File to boot in diagnostic mode
When booting an operating system or another stand−alone program, and neither a boot
device nor a filename is supplied, the boot command of the Forth monitor takes the
omitted values from the NVRAM configuration parameters. If the parameter
<diag−switch?> is false, the parameters <boot−device> and <boot−file> are used.
Otherwise, the OpenBoot firmware uses the parameters <diag−device> and <diag−file>
for booting.
SPARC/CPU−56T 97
Page 98

OpenBoot Firmware Diagnostics
Diagnostics
The Forth Monitor includes several diagnostic routines. These on−board tests let you
check devices such as network controller, SCSI devices, floppy disk system, memory,
clock, keyboard and audio. User−installed devices can be tested if their firmware includes
a self−test routine.
The table below lists several diagnostic routines.
Table 18: Diagnostic Routines
Command
probe−scsi Identifies devices connected to the on−board SCSI controller
probe−scsi−all [<device−path>] Performs probe−SCSI on all SCSI controllers installed in the
test [<device−specifier>] Executes the specified device’s self−test method.
test−all [<device−specifier>] Tests all devices that have a built−in self−test method and
watch−clock Monitors the clock function.
watch−net Monitors network connection via primary Ethernet
probe−ide Identifies devices connected to IDE bus
probe−ide−all [<device−path>]
SCSI Bus
Description
system below the specified device tree node. If
<device−path> is omitted, the root node is used.
<device−specifier> may be a device path name or a device
alias.
Example:
test net − test network connection
that reside below the specified device tree node. If
<device−specifier> is omitted, the root node is used.
Performs probe−ide on all IDE buses installed in the system
below the specified device tree. If <device path> is omitted,
the root node is used.a
To check the on−board SCSI#1 or SCSI#2 for connected devices, enter:a
okaprobe−scsi
Primary UltraSCSI bus:
Target 1
aaaUnit 0aaaDiskaaaaaWDIGTLaaWDE9100 ULTRA2aa1.21
−
Secondary UltraSCSI bus:
−
ok
All SCSI Buses
To check all SCSI buses installed in the system, enter the following:a
98 SPARC/CPU−56T
Page 99

Diagnostics OpenBoot Firmware
probe−scsi−all
The actual response depends on the devices on the SCSI buses.
Note:aA terminal message as answer to the command probe−scsi−all can take up to two
minutes.
okaprobe−scsi−all
/pci@1f,0/scsi@2
aa
Target 6
Unit 0 Disk Removable Read Only Device SONY CD−ROM CDU−8012 3.1a
aa
/pci@1f/pci@4,1/scsi@2
aa
Target 3
Unit 0 Disk FUJITSU M2952ESP SUN2.1G2545
ok
Single Device
To test a single installed device, enter:
test <device−specifier>
This executes the self−test device method of the specified device node.
Group of Devices
To test a group of installed devices, enter:
test−all
All devices below the root node of the device tree are tested. The response depends on the
devices having a self−test method. If a device specifier option is supplied at the command
line, all devices below the specified device tree node are tested.
Clock
To test the clock function enter:
okawatch−clock
Watching the ‘seconds’ register of the real time clock chip.
It should be ‘ticking’ once a second.
Type any key to stop.
22
ok
SPARC/CPU−56T 99
Page 100

OpenBoot Firmware Diagnostics
The system responds by incrementing a number every second. Press any key to stop the
test.
Network
To monitor the network connection enter:
okawatch−net
Internal loopback test −− succeeded.
Transceiver check −− Using Onboard transceiver −− Link Up.
passed
Using Onboard transceiver −− Link Up.
Looking for Ethernet packets.
‘.’ is a good packet. ‘X’ is a bad packet.
Type any key to stop.
...........X...........................X..............
ok
The system monitors the network traffic. It displays a dot (.) each time it receives a valid
packet and displays an X each time it receives a packet with an error which can be
detected by the network hardware interface.
a
IDE Devices
The following is an example output obtained after enterring probe−ide.a
okaprobe−ide
aaaDevice 0aa( Primary Master )
aaaaaaaaaaNot Present
aa
aaaDevice 1aa( Primary Slave )
aaaaaaaaaaNot Present
aa
aaaDevice 2aa( Secondary Master )
aaaaaaaaaaRemovable ATAPI Model: TOSHIBA CD−ROM XM−6702B
aa
aaaDevice 3aa( Secondary Slave )
aaaaaaaaaaNot Present
aa
ok
100 SPARC/CPU−56T
 Loading...
Loading...