

Page 1
Dual CAN FD Transceiver,
High Speed, Low Power
NCV7446
Description
NCV7446 is a dual CAN FD physical layer transceiver. It allows
interfacing of two independent CAN physical buses and two
independent CAN protocol controllers. The transceivers provide
differential transmit capability to the bus and differential receive
capability to the CAN controllers.
It is consisted of two fully independent NCV7344 transceivers. The
NCV7446 guarantees additional timing parameters to ensure robust
communication at data rates beyond 1 Mbps to cope with CAN
flexible data rate requirements (CAN FD). These features make the
NCV7446 an excellent choice for all types of HS−CAN networks, in
nodes that require a low−power mode with wake−up capability via the
CAN bus.
www.
1
DFNW14
CASE 507AC
onsemi.com
MARKING
DIAGRAM
NV74
46−0
ALYW
G
Features
• Compliant with the ISO 11898−2:2016
• CAN FD Timing Specified up to 5 Mbps
• Very Low Current Standby Mode with Wake−up via the Bus
• Low Electromagnetic Emission (EME) and High Electromagnetic
Immunity
• No Disturbance of the Bus Lines with an Un−powered Node
• Transmit Data (TxD) Dominant Timeout Function
• Under All Supply Conditions the Chip Behaves Predictably
• Very High ESD Robustness of Bus Pins
• Thermal Protection
• Bus Pins Short Circuit Proof to Supply Voltage and Ground
• Bus Pins Protected Against Transients in an Automotive
Environment
Quality
• Wettable Flank Package for Enhanced Optical Inspection
• AEC−Q100 Qualified and PPAP Capable
• These Devices are Pb−Free, Halogen Free/BFR Free and are RoHS
Compliant
Typical Applications
• Automotive
• Industrial Networks
NV7446−0 = Specific Device Code
A = Assembly Site
L = Wafer Lot
Y = Year of Production, Last Number
W = Work Week Number
G = Pb−Free Package
PIN CONNECTIONS
TxD1
GND1
VCC1
RxD1
TxD2
GND2
VCC2
1
2
3
4
5
6
7
NCV7446
14
STB1
13
CANH1
12
CANL1
11
STB2
10
CANH2
9
CANL2
8
RxD2
ORDERING INFORMATION
See detailed ordering and shipping information in the
package dimensions section on page 12 of this data sheet.
© Semiconductor Components Industries, LLC, 2018
December, 2019 − Rev. 2
1 Publication Order Number:
NCV7446/D
Page 2
NCV7446
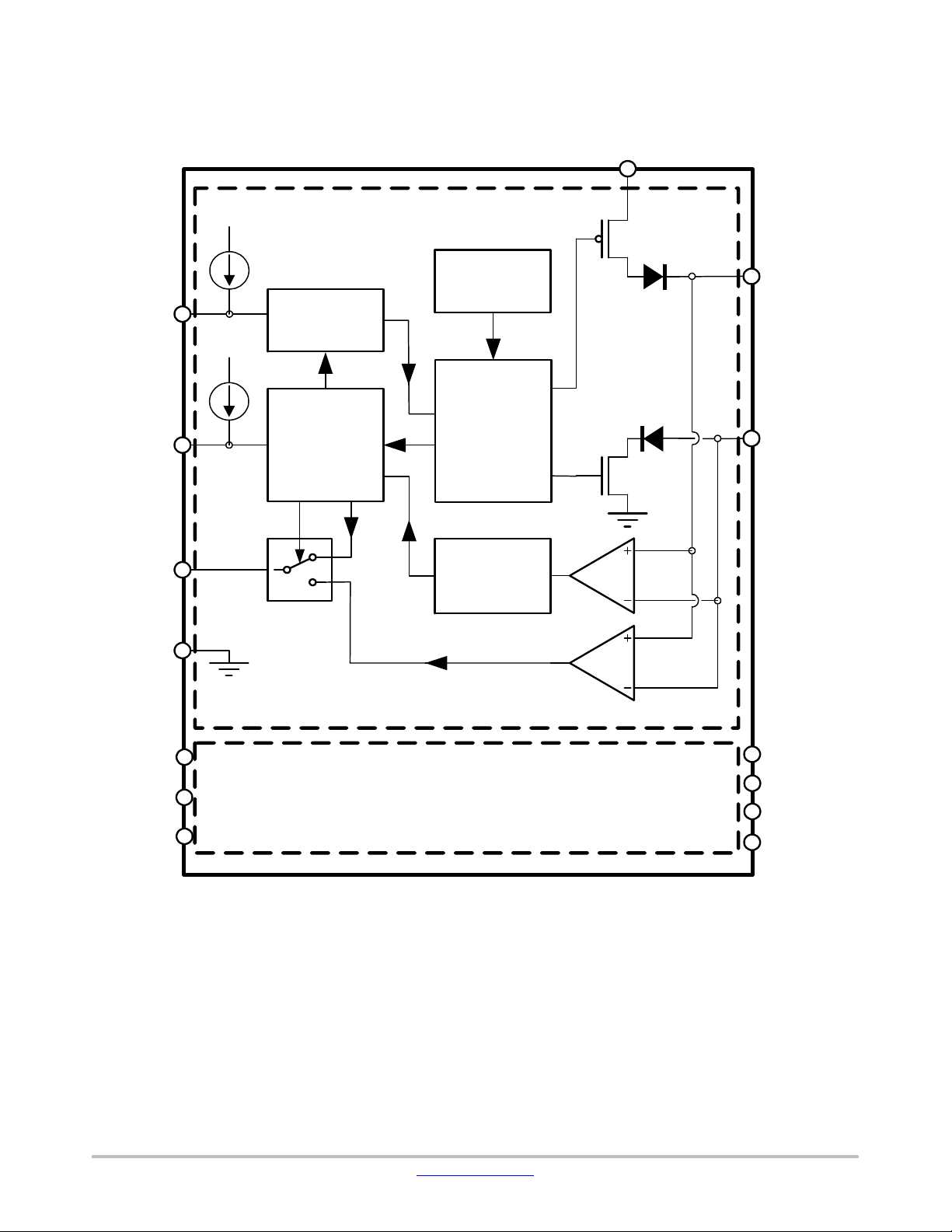
BLOCK DIAGRAM
V
CC1
3
V
CC1
NCV7446
TxD1
STB1
RxD1
GND1
14
Thermal
1
V
CC 1
4
2
Timer
Mode &
Wake −up
control
shutdown
Driver control
Wake −up
Filter
COMP
COMP
13
12
CANH1
CANL1
Channel 1
TxD2
GND2
V
CC2
5
6
7
Figure 1. NCV7446 Block Diagram
Channel2
www.onsemi.com
2
11
10
9
8
STB2
CANH2
CANL2
RxD2
Page 3
NCV7446
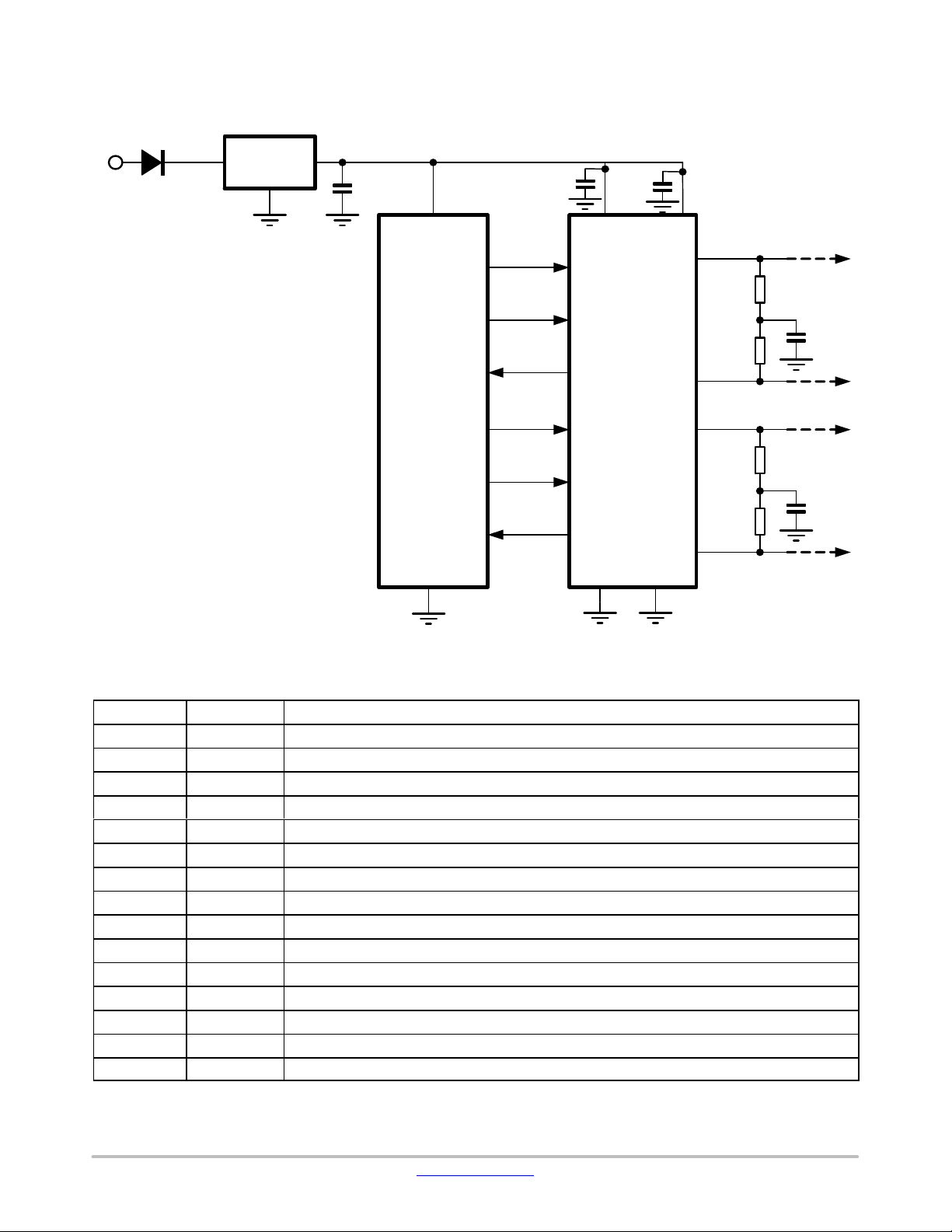
TYPICAL APPLICATION DIAGRAM
VBAT
IN OUT
5V −reg
.
V
CC
Micro−
controller
GND
STB1
TxD1
RxD1
STB2
TxD2
RxD2
V
CC1
3
14
1
NCV7446
4
11
5
8
26
GND1
7
13
12
10
GND2
V
9
CC2
CANH1
CAN
BUS
CANL1
CANH2
CAN
BUS
CANL2
Figure 2. NCV7446 Application Diagram
Table 1. PIN FUNCTION DESCRIPTION
Pin Number Pin Name Description
1 TxD1
2 GND1 Ground for channel 1
3 V
4 RxD1
5 TxD2
6 GND2 Ground for channel 2
7 V
8 RxD2
9 CANL2 Low−level CAN bus line channel 2 (low in dominant mode)
10 CANH2 High−level CAN bus line channel 2 (high in dominant mode)
11 STB2 Standby mode control input for channel 2; internal pull−up current
12 CANL1 Low−level CAN bus line channel 1 (low in dominant mode)
13 CANH1 High−level CAN bus line channel 1 (high in dominant mode)
14 STB1 Standby mode control input for channel 1; internal pull−up current
EP Exposed Pad Recommended to connect to GND or left floating in application
CC1
CC2
Transmit data input for channel 1; low input Ù dominant driver; internal pull−up current
Supply voltage for channel 1
Receive data output for channel 1; dominant transmitter Ù low output
Transmit data input for channel 2; low input Ù dominant driver; internal pull−up current
Supply voltage for channel 2
Receive data output for channel 2; dominant transmitter Ù low output
www.onsemi.com
3
Page 4
NCV7446
FUNCTIONAL DESCRIPTION
Operating Modes
NCV7446 provides two modes of operation per
transceiver as illustrated in Table 2. These modes are
selectable through pins STB1 and STB2 independently for
each transceiver.
Table 2. OPERATING MODES
Pins
STBx
Low Normal
High Standby
Normal Mode
Mode Pins RxDx
Low when bus
dominant
Follows the bus
when wake−up
detected
High when bus
recessive
High when no
wake−up request detected
In the normal mode, the selected transceiver is able to
communicate via the bus lines. The signals are transmitted
and received to the CAN controller via the pins TxDx and
RxDx. The slopes on the bus lines outputs are optimized to
give low EME.
t
wake_filt
t
wake_filt
Standby Mode
In standby mode both the transmitter and receiver are
disabled and a very low−power differential receiver
monitors the bus lines for CAN bus activity. The bus lines
are biased to ground and supply current is reduced to a
minimum. When a wake−up request is detected by the
low−power differential receiver, the signal is first filtered
and then verified as a valid wake signal after a time period of
t
wake_filt, the corresponding RxDx pin is driven low by the
transceiver (following the bus) to inform the controller of
the wake−up request.
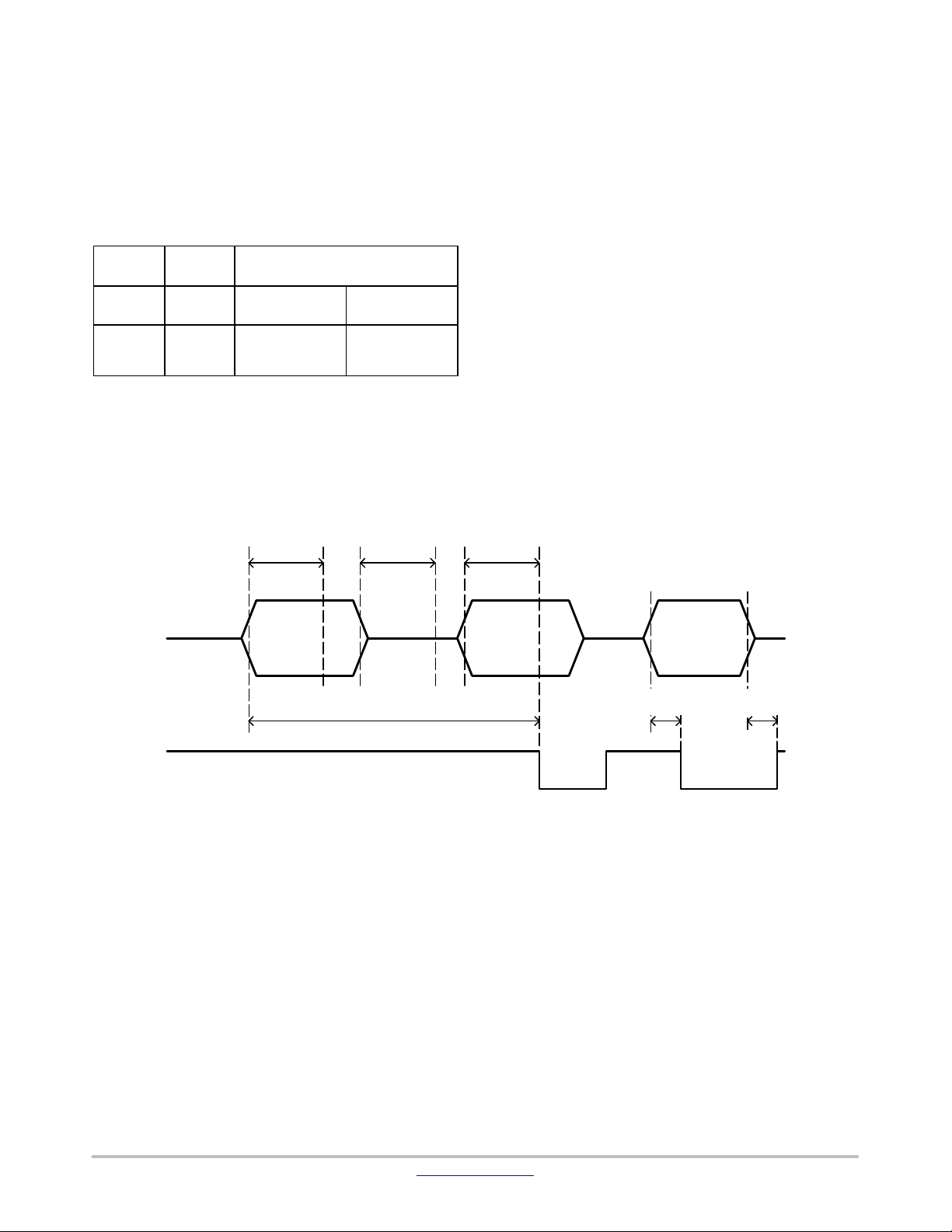
Wake−up
When a valid wake−up pattern (phase in order
dominant − recessive − dominant) is detected during the
standby mode the RxDx pins follows the bus. Minimum
length of each phase is t
wake_filt
Pattern must be received within t
– see Figure 3.
to be recognized
wake_to
as valid wake−up otherwise internal logic is reset.
t
wake_filt
CANHx
CANLx
RxDx
<t
wake_to
Figure 3. NCV7446 Wake−up behavior
t
dwakerdtdwakedr
www.onsemi.com
4
Page 5

NCV7446
Overtemperature Detection
A thermal protection circuit protects the IC from damage
by switching off the affected transmitter if the junction
temperature exceeds a value of approximately 170°C.
Because the transmitter dissipates most of the power, the
power dissipation and temperature of the IC is reduced. All
other IC functions continue to operate. The transmitter
off−state resets when the temperature decreases below
the shutdown threshold and pins TxDx goes high.
The thermal protection circuit is particularly needed when
a bus line short circuits.
TxDx Dominant Timeout Function
A TxD dominant timeout timer circuit prevents the bus
lines being driven to a permanent dominant state (blocking
all network communication) if pins TxDx are forced
permanently low by a hardware and/or software application
failure. The timer is triggered by a negative edge on pins
TxDx. If the duration of the low−level on pins TxDx exceeds
the internal timer value t
dom(TxD)
, the transmitter is
disabled, driving the bus into a recessive state. The timer is
reset by a positive edge on pins TxDx.
This TxD dominant timeout time t
dom(TxD)
defines
the minimum possible bit rate to 17 kbps.
Fail Safe Features
A current−limiting circuit protects the transmitter output
stage from damage caused by accidental short circuit
to either positive or negative supply voltage, although
power dissipation increases during this fault condition.
Undervoltage on V
sending data on the bus when there is not enough V
CC1
or V
pins prevents the chip
CC2
CC
supply
voltage.
After supply is recovered, corresponding TxD pin must be
first released to high to allow sending dominant bits again.
Recovery time from undervoltage detection is equal to
td(stb−nm) time.
The pins CANHx and CANLx are protected from
automotive electrical transients (according to ISO 7637; see
Figure 5). Pins TxDx and STBx are pulled high internally
should the input become disconnected. Pins TxDx, STBx
and RxDx will be floating, preventing reverse supply should
the adjacent VCCx supply be removed.
www.onsemi.com
5
Page 6

NCV7446
ELECTRICAL CHARACTERISTICS
Definitions
All voltages are referenced to GNDx (pin 2 or pin 6).
Positive currents flow into the IC. Sinking current means the
Table 3. ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Conditions Min Max Unit
V
SUP
V
CANH
V
CANL
V
CANH−CANL
V
IN
V
OUT
V
esdHBM
V
esdCDM
V
esdIEC
V
schaff
Supply voltage V
DC voltage at pins CANHx 0 < V
DC voltage at pins CANLx 0 < V
DC voltage between any two pins
(including CANHx and CANLx)
DC Voltage at pins TxDx, STBx −0.3 +6 V
DC Voltage at pin RxDx −0.3 V
Electrostatic discharge voltage at all pins,
Component HBM
Electrostatic discharge voltage at all pins,
Component CDM
Electrostatic discharge voltage at pins CANHx
and CANLx, System HBM (Note 4)
Voltage transients, pins CANHx, CANLx.
According to ISO7637−3, Class C (Note 4)
Latch−up Static latch−up at all pins (Note 5) 150 mA
T
stg
T
J
Storage temperature −55 +150 °C
Maximum junction temperature −40 +170 °C
MSL Moisture Sensitivity Level 1 −
T
SLD
Lead temperature Soldering − Reflow (Note 11) − 260 °C
Stresses exceeding those listed in the Maximum Ratings table may damage the device. If any of these limits are exceeded, device functionality
should not be assumed, damage may occur and reliability may be affected.
1. Standardized human body model electrostatic discharge (ESD) pulses in accordance to EIA−JESD22. Equivalent to discharging a 100 pF
capacitor through a 1.5 kW resistor.
2. Standardized charged device model ESD pulses when tested according to AEC−Q100−011.
3. System human body model electrostatic discharge (ESD) pulses in accordance to IEC 61000−4−2. Equivalent to discharging a 150 pF
capacitor through a 330 W resistor referenced to GNDx.
4. Results were verified by external test house.
5. Static latch−up immunity: Static latch−up protection level when tested according to EIA/JESD78.
6. For information, please refer to our Soldering and Mounting Techniques Reference Manual, SOLDERRM/D
Table 4. THERMAL CHARACTERISTICS
Symbol Parameter Conditions Value Unit
R
q
JA_1
R
q
JA_2
R
q
JA_3
R
q
JA_4
7. Refer to ELECTRICAL CHARACTERISTICS, RECOMMENDED OPERATING RANGES and/or APPLICATION INFORMATION for Safe
Operating parameters.
8. Test board according to EIA/JEDEC Standard JESD51−3, signal layer with 10% trace coverage.
9. Test board according to EIA/JEDEC Standard JESD51−7, signal layers with 10% trace coverage.
10. Test board according to EIA/JEDEC Standard JESD51−3 and JESD51−5 , signal layer with 10% trace coverage and with thermal via array
under the exposed pad connected to the second copper layer.
11. Test board according to EIA/JEDEC Standard JESD51−5 and JESD51−7, signal layers with 10% trace coverage and thermal via array under
the exposed pad connected to the first inner copper layer.
Thermal Resistance Junction−to−Air, JEDEC 1S0P PCB Free air; (Note 8) 101 K/W
Thermal Resistance Junction−to−Air, JEDEC 2S2P PCB Free air; (Note 9) 53 K/W
Thermal Resistance Junction−to−Air Free air; (Note 10) 76 K/W
Thermal Resistance Junction−to−Air Free air; (Note 11) 46 K/W
CC1,
V
CC2
current is flowing into the pin; sourcing current means the
current is flowing out of the pin.
−0.3 +6 V
< 5.25 V; no time limit −42 +42 V
CCX
< 5.25 V; no time limit −42 +42 V
CCX
−42 +42 V
+ 0.3 V
CCx
(Note 1) −8 +8 kV
(Note 2) −750 +750 V
Without bus filter (Note 3) −7 +7 kV
With bus filter (Note 3) −11 +11 kV
test pulses 1 −100 V
test pulses 2a +75 V
test pulses 3a −150 V
test pulses 3b +100 V
www.onsemi.com
6
Page 7

Table 5. ELECTRICAL CHARACTERISTICS
V
V
CC1,
SUPPLY (PINS V
V
UVD(VCC)(stby)
V
UVD(VCC)(swoff)
TRANSMITTER DATA INPUT (Pins TxDx)
TRANSMITTER MODE SELECT (Pins STBx)
RECEIVER DATA OUTPUT (Pins RxDx)
BUS LINES (Pins CANHx and CANLx)
V
V
V
V
V
V
V
= 4.75 V to 5.25 V; TJ = −40°C to +150°C; RLT = 60 W, C
CC2
Symbol
V
CCx
I
CCx
I
CCSx
)
CCX
Power supply voltage (Note 12) 4.75 5.0 5.25 V
Supply current on single channel
Supply current in standby mode on
single channel
Parameter Conditions Min Typ Max Unit
Standby undervoltage detection V
Switch−off undervoltage detection V
V
IH
V
IL
I
IH
I
IL
C
i
V
IH
V
IL
I
IH
I
IL
C
i
I
OH
I
OL
I
o(rec)
I
LI
o(rec)(CANH)
o(rec)(CANL)
o(off)(CANH)
o(off)(CANL)
o(off)(CANL)
o(dom)(CANH)
o(dom)(CANL)
High−level input voltage Output recessive 2.0 − − V
Low−level input voltage Output dominant − − +0.8 V
High−level input current V
Low−level input current V
Input capacitance (Note 13) − 5 10 pF
High−level input voltage Standby mode 2.0 − − V
Low−level input voltage Normal mode − − +0.8 V
High−level input current V
Low−level input current V
Input capacitance (Note 13) − 5 10 pF
High−level output current Normal mode
Low−level output current V
Recessive output current at pins
CANHx and CANLx
Input leakage current
Recessive output voltage at pins CANHx Normal mode, V
Recessive output voltage at pins CANLx Normal mode, V
Recessive output voltage at pin CANHx Standby mode; RLT and C
Recessive output voltage at pin CANLx Standby mode; RLT and C
Differential bus output voltage
(V
CANHx * VCANLx)
Dominant output voltage at pins CANHx V
Dominant output voltage at pins CANLx V
NCV7446
= 100 pF, C1 not used, C
LT
Dominant; V
Recessive; V
= Low 20 45 55 mA
TxDx
= Low 1.9 5.0 10 mA
TxDx
Normal mode, Dominant;
V
= 0 V; one of bus wires
TxDx
shorted; −3 V ≤ (V
V
) ≤ +18 V
CANLx
CANHx
TJ ≤ 100°C, (Note 13) − 10 15
pins 3.5 4.0 4.3 V
CCx
pins 2.0 2.3 2.6 V
CCx
= V
TxDx
CCx
= 0 V −300 −150 −70
TxDx
= V
STBx
STBx
V
RxDx
RxDx
−27 V < V
+32 V; Normal mode
0 W < R(V
1 MW; V
R
LT
R
LT
CCx
= 0 V −15 − −1.0
= V
– 0.4 V
CCx
= 0.4 V 1.0 6.0 12 mA
, V
CANHx
CCx
CANLx
and CLT not used
and CLT not used
CANLx
to GNDx) <
= V
CANHx
= High;
TxDx
= High;
TxDx
not used
not used
Standby mode; RLT and C
not used
= 0 V; t < tdom(TxD);
TxDx
50 W < R
TxDx
50 W < R
< 65 W
LT
= 0 V; t < tdom(TxD);
< 65 W
LT
= 15 pF, unless specified otherwise.
RxD
2.0 − 105 mA
,
−5.0 0 +5.0
−1.0 0 +1.0
−8.0 −3.0 −1.0 mA
<
−5.0 − +5.0 mA
−5.0 0 +5.0
= 5 V
2.0 2.5 3.0 V
2.0 2.5 3.0 V
LT
LT
LT
−0.1 − +0.1 V
−0.1 − +0.1 V
−0.2 − +0.2 V
2.75 3.5 4.5 V
0.5 1.5 2.25 V
mA
mA
mA
mA
mA
mA
www.onsemi.com
7
Page 8

Table 5. ELECTRICAL CHARACTERISTICS
V
V
CC1,
BUS LINES (Pins CANHx and CANLx)
V
o(dom)(diff)_arb
V
V
V
V
V
V
i(diff)(th)_NORM
V
i(diff)(th)_NORM_H
V
i(diff)(th)_STDBY
R
R
THERMAL SHUTDOWN
TIMING CHARACTERISTICS (see Figure 4 and Figure 6)
t
d(TxD−BUSon)
t
d(TxD−BUSoff)
t
d(BUSon−RxD)
t
d(BUSoff−RxD)
= 4.75 V to 5.25 V; TJ = −40°C to +150°C; RLT = 60 W, C
CC2
Symbol UnitMaxTypMinConditionsParameter
V
o(dom)(diff)
V
o(rec)(diff)
Differential bus output voltage
(V
CANHx
− V
CANLx
)
Differential bus output voltage
(V
CANHx
− V
CANLx
)
Differential bus output voltage during
o(dom)(sym)
I
o(sc)(CANH)
I
o(sc)(CANL)
i(rec)(diff)_NM
i(rec)(diff)_LP
i(dom)(diff)_NM
i(dom)(diff)_LP
arbitration (V
Dominant output voltage driver symmetry
(V
CANHx + VCANLx)
Short circuit output current at pins CANHx −3 V < V
Short circuit output current at pins CANLx −3 V < V
Differential input voltage range recessive
state
Differential input voltage range dominant
state
CANHx
− V
CANLx
)
Differential receiver threshold voltage in
normal mode
Differential receiver threshold voltage in
normal mode, extended range
Differential receiver threshold voltage in
standby mode
i(cm)(CANH)
i(cm)(CANL)
R
i(cm)(m)
R
i(diff)
C
i(CANH)
C
i(CANL)
C
i(diff)
T
J(sd)
Common−mode input resistance at pin
CANHx
Common−mode input resistance at pin
CANLx
Matching between pin CANHx and pin
CANLx common mode input resistance
Differential input resistance −2 V ≤ V
Input capacitance at pins CANHx V
Input capacitance at pins CANLx V
Differential input capacitance V
Shutdown junction temperature per channel Junction temperature rising 160 180 200 °C
Delay TxDx to bus active − 75 − ns
Delay TxDx to bus inactive − 85 − ns
Delay bus active to RxDx − 24 − ns
Delay bus inactive to RxDx − 32 − ns
t
pd_dr
Propagation delay TxDx to RxDx
dominant to recessive transition
NCV7446
= 100 pF, C1 not used, C
LT
V
= 0 V; dominant;
TxDx
45 W < R
V
TxDx
load
R
LT =
RLT = 60W; C1 = 4.7 nF; C
not used; TxDx = square
wave up to 1 MHz
Normal mode;
−12 V ≤ V
V
CANLx
Standby mode;
−12 V ≤ V
V
CANLx
Normal mode;
−12 V ≤ V
V
CANLx
Standby mode;
−12 V ≤ V
V
CANLx
−12 V ≤ V
−12 V ≤ V
−30 V < V
−30 V < V
−12 V ≤ V
−12 V ≤ V
−2 V ≤ V
−2 V ≤ V
−2 V ≤ V
−2 V ≤ V
V
CANHx
−2 V ≤ V
TxDx
TxDx
TxDx
< 65 W
LT
= High; recessive; no
2.24kW (Note 13)
< +18 V −100 − 1.5 mA
CANHx
< +36 V −1.5 − 100 mA
CANLx
CANHx
≤ +12 V; no load
CANHx
≤ +12 V; no load
CANHx
≤ +12 V; no load
CANHx
≤ +12 V; no load
CANLx
CANHx
CANLx
CANHx
CANLx
CANHx
≤ +7 V;
CANLx
≤ +7 V
CANHx
≤ +7 V;
CANLx
≤ +7 V
CANHx
= V
CANLx
≤ +7 V;
CANLx
≤ +7 V
CANHx
= High; (Note 13) − 4.5 20 pF
= High; (Note 13) − 4.5 20 pF
= High; (Note 13) − 3.75 10 pF
= 15 pF, unless specified otherwise.
RxD
1.5 2.25 3.0 V
−50 0 +50 mV
1.5 − 5.0 V
LT
0.9 1.0 1.1 VCCx
−3.0 − 0.5 V
,
−3.0 0.4 V
,
0.9 − 8.0 V
,
1.05 8.0 V
,
≤ +12 V;
0.5 − 0.9 V
≤ +12 V
< +35 V;
0.4 − 1.0 V
< +35 V
≤ +12 V;
0.4 − 1.05 V
≤ +12 V
15 26 37
15 26 37
= +5 V −1 0 +1 %
25 50 75
50 100 210 ns
kW
kW
kW
www.onsemi.com
8
Page 9

NCV7446
Table 5. ELECTRICAL CHARACTERISTICS
V
V
CC1,
= 4.75 V to 5.25 V; TJ = −40°C to +150°C; RLT = 60 W, C
CC2
Symbol UnitMaxTypMinConditionsParameter
TIMING CHARACTERISTICS (see Figure 4 and Figure 6)
t
pd_rd
t
d(stb−nm)
t
wake_filt
t
dwakerd
t
dwakedr
t
wake_to
t
dom(TxD)
t
Bit(RxD)
t
Bit(Vi(diff))
Dt
Rec
Propagation delay TxDx to RxDx
recessive to dominant transition
Delay standby mode to normal mode 5.0 11 20
Dominant time for wake−up via bus 0.5 − 5.0
Delay to flag wake event
(recessive to dominant transitions)
Delay to flag wake event
(dominant to recessive transitions)
Bus time for wake−up timeout Standby mode 1.0 − 10 ms
TxDx dominant time for timeout V
Bit time on RxDx pin
Bit time on bus (CANHx – CANLx pin)
Receiver timing symmetry
Dt
Rec =
t
Bit(RxD) −
t
Bit(Vi(diff))
;
12.In the range of 4.5 V to 4.75 V and from 5.25 V to 5.5 V the chip is fully functional; some parameters may be outside of the specification.
13.Values based on design and characterization, not tested in production.
= 100 pF, C1 not used, C
LT
= 15 pF, unless specified otherwise.
RxD
50 120 210 ns
Valid bus wake−up event 0.5 2.6 6.0
Valid bus wake−up event 0.5 2.6 6.0
= 0 V; Normal mode 1.0 − 10 ms
TxDx
t
= 500 ns 400 − 550 ns
Bit(TxD)
t
= 200 ns 120 − 220 ns
Bit(TxD)
t
= 500 ns 435
Bit(TxD)
t
= 200 ns 155
Bit(TxD)
t
= 500 ns −65 − +40 ns
Bit(TxD)
t
= 200 ns −45 − +15 ns
Bit(TxD)
−
−
530 ns
210 ns
ms
ms
ms
ms
1
TxDx
V
i(diff)=VCANHx−VCANLx
RxDx
MEASUREMENT SETUPS AND DEFINITIONS
0.7 × V
IO
0.3 × V
IO
5 × t
bit(TxD)
1
TxDx Edge length below 10 ns
t
d(TxD−BUSoff)
t
t
d(TxD−BUSon)
500 mV
0.7 × V
bit(TxD)
t
pd_dr
t
bit(Vi(diff))
IO
0.3 × V
t
pd_rd
t
d(BUSoff−RxD)
t
bit(RxD)
IO
900 mV
t
d(BUSon−RxD)
0.3 × V
IO
Figure 4. Transceiver Timing Diagram
www.onsemi.com
9
Page 10

+5 V
100 nF
TxD1
TxD2
RxD1
3
1
5
4
NCV7446
V
CC1
NCV7446
V
CC2
5
13
CANH1
1nF
Transient
Generator
1nF
12
CANL1
+5 V
15 pF
15 pF
CANH2
10
1nF
RxD2
8
11
14
STB1 GND1
2
STB2
9
6
GND2
1nF
CANL2
Figure 5. Test Circuit for Automotive Transients
100 nF
TxD1
TxD2
RxD1
V
CC1
35
1
5
4
NCV 7446
V
CC2
CANH 1
13
RLT/2
4.7 nF
C
1
RLT/2
12
CANL1
Generator
2x 30 W
Transient
C
LT
100 pF
15 pF
15 pF
RxD 2
8
11
14
STB2
STB1 GND 1
10
9
6
2
GND2
Figure 6. Test Circuit for Timing Characteristics
www.onsemi.com
10
CANH2
4.7 nF
CANL2
RLT/2
C
1
RLT/2
2x 30 W
C
LT
100 pF
Page 11

NCV7446
Table 6. ISO 11898−2:2016 PARAMETER CROSS−REFERENCE TABLE
ISO 11898−2:2016 Specification NCV7446 Datasheet
Parameter Notation Symbol
Dominant output characteristics
Single ended voltage on CAN_H
Single ended voltage on CAN_L V
Differential voltage on normal bus load V
Differential voltage on effective resistance during arbitration V
Differential voltage on extended bus load range (optional) V
V
CAN_H
CAN_L
Diff
Diff
Diff
Driver symmetry
Driver symmetry
V
SYM
Driver output current
Absolute current on CAN_H
Absolute current on CAN_L I
I
CAN_H
CAN_L
Receiver output characteristics, bus biasing active
Single ended output voltage on CAN_H
Single ended output voltage on CAN_L V
Differential output voltage V
V
CAN_H
CAN_L
Diff
Receiver output characteristics, bus biasing inactive
Single ended output voltage on CAN_H
Single ended output voltage on CAN_L V
Differential output voltage V
V
CAN_H
CAN_L
Diff
Optional transmit dominant timeout
Transmit dominant timeout, long
Transmit dominant timeout, short t
t
dom
dom
Static receiver input characteristics, bus biasing active
Recessive state differential input voltage range
Dominant state differential input voltage range V
V
Diff
Diff
Static receiver input characteristics, bus biasing inactive
Recessive state differential input voltage range
Dominant state differential input voltage range V
V
Diff
Diff
Receiver input resistance
Differential internal resistance R
Single ended internal resistance R
CAN_H
R
CAN_L
Diff
Receiver input resistance matching
Matching a of internal resistance
m
R
Implementation loop delay requirement
Loop delay
t
Loop
Optional implementation data signal timing requirements for use with bit rates above 1 Mbit/s and up to 2 Mbit/s
Transmitted recessive bit width @ 2 Mbit/s
Received recessive bit width @ 2 Mbit/s t
Receiver timing symmetry @ 2 Mbit/s
t
Bit(Bus)
Bit(RXD)
Dt
Rec
V
V
V
o(dom)(diff)_arb
V
I
I
V
V
V
V
V
V
i(dom)(diff)_NM
V
V
R
R
o(dom)(CANH)
o(dom)(CANL)
V
o(dom)(diff)
V
o(dom)(diff)
o(dom)(sym)
o(SC)(CANH)
o(SC)(CANL)
o(rec)(CANH)
o(rec)(CANL)
V
o(rec)(diff)
o(off)(CANH)
o(off)(CANL)
V
o(off)(dif)
t
dom(TxD)
NA
i(rec)(diff)_NM
i(rec)(diff)_LP
i(dom)(diff)_LP
R
i(diff)
i(cm)(CANH)
i(cm)(CANL)
R
i(cm)(m)
t
pd_rd
t
pd_dr
t
Bit(Vi(diff))
t
Bit(RxD)
D
tRec
www.onsemi.com
11
Page 12

NCV7446
†
Table 6. ISO 11898−2:2016 PARAMETER CROSS−REFERENCE TABLE
ISO 11898−2:2016 Specification NCV7446 Datasheet
Parameter SymbolNotation
Optional implementation data signal timing requirements for use with bit rates above 2 Mbit/s and up to 5 Mbit/s
Transmitted recessive bit width @ 5 Mbit/s
Transmitted recessive bit width @ 5 Mbit/s t
Received recessive bit width @ 5 Mbit/s
Maximum ratings of V
Maximum rating V
Diff
General maximum rating V
CAN_H
CAN_H
, V
Optional: Extended maximum rating V
CAN_L
and V
and V
CAN_L
CAN_H
Diff
and V
CAN_L
Maximum leakage currents on CAN_H and CAN_L, unpowered
Leakage current on CAN_H, CAN_L
Bus biasing control timings
CAN activity filter time, long
CAN activity filter time, short t
Wake−up timeout, short t
Wake−up timeout, long t
Timeout for bus inactivity (Required for selective wake−up implementation only) t
Bus Bias reaction time (Required for selective wake−up implementation only) t
t
Bit(Bus)
Bit(RXD)
Dt
Rec
V
Diff
V
CAN_H
V
CAN_L
V
CAN_H
V
CAN_L
I
CAN_H
I
CAN_L
t
Filter
Filter
Wake
Wake
Silence
Bias
V
t
Bit(Vi(diff))
t
Bit(RxD)
Dt
Rec
CANH−CANL
V
CANH
V
CANL
NA
I
LI
t
wake_filt
NA
NA
t
wake_to
NA
NA
ORDERING INFORMATION
Device Description Package Shipping
NCV7446MW0R2G Dual CAN FD Transceiver, High Speed, Low Power DFNW14
(Pb−Free)
†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our Tape and Reel Packaging
Specifications Brochure, BRD8011/D.
5000 / Tape & Reel
www.onsemi.com
12
Page 13

DFNW14 4.5x3, 0.65P
8
MECHANICAL CASE OUTLINE
PACKAGE DIMENSIONS
1
SCALE 2:1
D
PIN ONE
REFERENCE
TOP VIEW
DETAIL B
C
C
SIDE VIEW
NOTE 4
0.08
C0.10
C
DETAIL A
D2
1
14
K
e
BOTTOM VIEW
RECOMMENDED
SOLDERING FOOTPRINT*
4.35
4.23
14
3.60
1.75
1
0.65
PITCH
*For additional information on our Pb−Free strategy and soldering
details, please download the ON Semiconductor Soldering and
Mounting Techniques Reference Manual, SOLDERRM/D.
14X
0.33
DIMENSIONS: MILLIMETERS
A B
E
A
E2
b
0.10
0.05
8
7
SEATING
C
PLANE
14X
M
C AB
M
C
14X
0.75
PACKAGE
OUTLINE
L
NOTE 3
A3
7
8
14X
CASE 507AC
ISSUE D
LL
DETAIL A
A1
A4
DETAIL B
A4
PLATED
SURFACES
SECTION C−C
ALTERNATE
CONSTRUCTION
EXPOSED
COPPER
PLATING
L3
DATE 03 JUL 201
NOTES:
L3L3
1. DIMENSIONS AND TOLERANCING PER
ASME Y14.5M, 1994.
2. CONTROLLING DIMENSION: MILLIMETERS.
3. DIMESNION b APPLIES TO PLATED
TERMINAL AND IS MEASURED BETWEEN
0.15 AND 0.30 MM FROM TERMINAL.
4. COPLANARITY APPLIES TO THE EXPOSED
PAD AS WELL AS THE TERMINALS.
5. THIS DEVICE CONTAINS WETTABLE FLANK
DESIGN FEATURES TO AID IN FILLET FORMATION ON THE LEADS DURING MOUNTING.
MILLIMETERS
DIM MIN NOM
A 0.80 0.85
A1 −−− −−−
A3
A4
0.10 −−− −−−
b 0.25 0.30
D
4.40 4.50
D2 4.13 4.20
E
2.90 3.00
E2 1.53 1.60
e 0.65 BSC
K
L 0.35 0.40
L3
0.00 0.05 0.10
0.20 REF
0.30 REF
MAX
0.90
0.05
0.35
4.60
4.27
3.10
1.67
0.45
GENERIC
MARKING DIAGRAM*
XXXXX
XXXXX
AYWWG
G
XXXXX = Specific Device Code
A = Assembly Location
Y = Year
WW = Work Week
G = Pb−Free Package
(*Note: Microdot may be in either location)
*This information is generic. Please refer to
device data sheet for actual part marking.
Pb−Free indicator, “G” or microdot “ G”, may
or may not be present. Some products may
not follow the Generic Marking.
DOCUMENT NUMBER:
DESCRIPTION:
ON Semiconductor and are trademarks of Semiconductor Components Industries, LLC dba ON Semiconductor or its subsidiaries in the United States and/or other countries.
ON Semiconductor reserves the right to make changes without further notice to any products herein. ON Semiconductor makes no warranty, representation or guarantee regarding
the suitability of its products for any particular purpose, nor does ON Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically
disclaims any and all liability, including without limitation special, consequential or incidental damages. ON Semiconductor does not convey any license under its patent rights nor the
rights of others.
© Semiconductor Components Industries, LLC, 2018
98AON14979G
DFNW14 4.5x3, 0.65P
Electronic versions are uncontrolled except when accessed directly from the Document Repository.
Printed versions are uncontrolled except when stamped “CONTROLLED COPY” in red.
PAGE 1 OF 1
www.onsemi.com
Page 14

ON Semiconductor and are trademarks of Semiconductor Components Industries, LLC dba ON Semiconductor or its subsidiaries in the United States and/or other countries.
ON Semiconductor owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of ON Semiconductor’s product/patent
coverage may be accessed at www.onsemi.com/site/pdf/Patent−Marking.pdf
ON Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does ON Semiconductor assume any liability
arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages.
Buyer is responsible for its products and applications using ON Semiconductor products, including compliance with all laws, regulations and safety requirements or standards,
regardless of any support or applications information provided by ON Semiconductor. “Typical” parameters which may be provided in ON Semiconductor data sheets and/or
specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer
application by customer’s technical experts. ON Semiconductor does not convey any license under its patent rights nor the rights of others. ON Semiconductor products are not
designed, intended, or authorized for use as a critical component in life support systems or any FDA Class 3 medical devices or medical devices with a same or similar classification
in a foreign jurisdiction or any devices intended for implantation in the human body. Should Buyer purchase or use ON Semiconductor products for any such unintended or unauthorized
application, Buyer shall indemnify and hold ON Semiconductor and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and
expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such
claim alleges that ON Semiconductor was negligent regarding the design or manufacture of the part. ON Semiconductor is an Equal Opportunity/Affirmative Action Employer. This
literature is subject to all applicable copyright laws and is not for resale in any manner.
. ON Semiconductor reserves the right to make changes without further notice to any products herein.
PUBLICATION ORDERING INFORMATION
LITERATURE FULFILLMENT:
Email Requests to: orderlit@onsemi.com
ON Semiconductor Website: www.onsemi.com
TECHNICAL SUPPORT
North American Technical Support:
Voice Mail: 1 800−282−9855 Toll Free USA/Canada
Phone: 011 421 33 790 2910
Europe, Middle East and Africa Technical Support:
Phone: 00421 33 790 2910
For additional information, please contact your local Sales Representative
◊
www.onsemi.com
1
 Loading...
Loading...