

Page 1
TJ1-
Trajexia - контролер за електрозадвижване
Управление на
електрозадвижването
Високотехнологичен самостоятелен контролер
за електрозадвижване. Използва
информационната магистрала за
електрозадвижвания Mechatrolink-II
• Интелигентно координиране на движението по 16 оси
по стабилна и високоскоростна комуникационна мрежа
за електрозадвижвания MECHATROLINK-II
• Поддържа управление на позиция, скорост и въртящ
момент
• Всяка ос може да управлява сложни движения чрез
интерполация,
електорнно управляеми ексцентрици и електронно
управляеми скоростни кутии (e-gearbox)
• Разширени средства за откриване и отстраняване на
грешки, включително функции за трасиране и
осцилоскоп
• Хардуерен регистриращ вход за всяка серво ос
• Управление на серво, инвертори и входно/изходни
модули в рамките на една мрежа за електрозадвижене
• Многозадачен контролер, способен да изпълнява
едновременно до 14 задачи
• Отворена комуникация - вградена Ethernet връзка;
PROFIBUS-DP и DeviceNet като опции
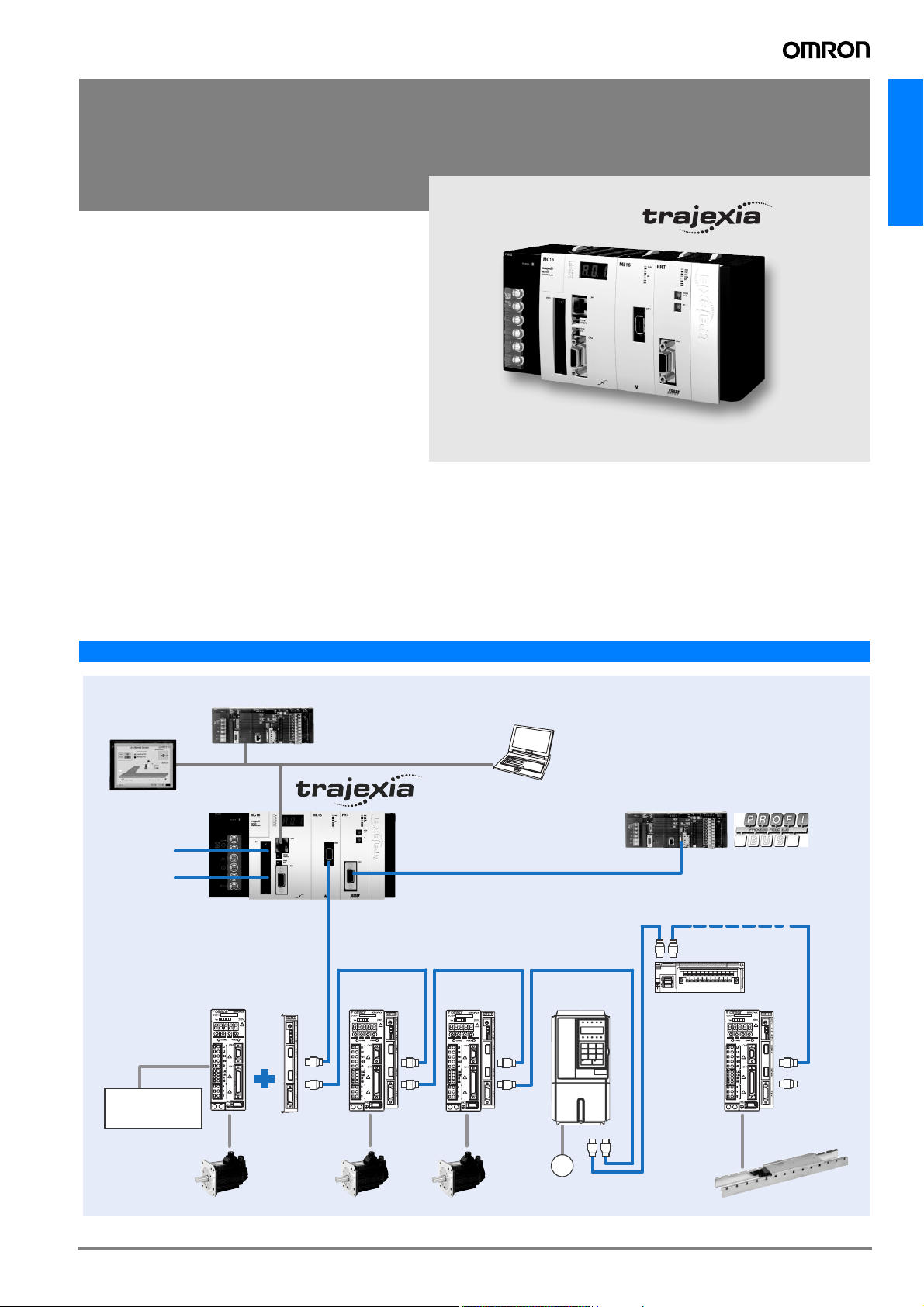
Конфигурация на системата
Програмируеми
Интерфейс
"човек-машина"
от серията NS
Цифрови
входове/изходи
Host-link
Вход
Бърз регистриращ
вход, функция
home
Серво двигатели
от серия Sigma-II
контролери от серията CJ
Контролер за
електрозадвижв
ане
Серво
задвижване
от серия Sigma-II
JUSP-NS115
MECHATROLINK-II
модул
Ethernet
MECHATROLINK-II
PROFIBUS-DP
Софтуерен пакет Trajexia
част от CX-One
PROFIBUS-DP
Честотен
инвертор
M
Макс. 16 оси
Обща дължина: 50 m
Входно/изходен
модул
Линейни двигатели
от серия Sigma-II
Терминатор
1Trajexia - контролер за електрозадвижване
Page 2
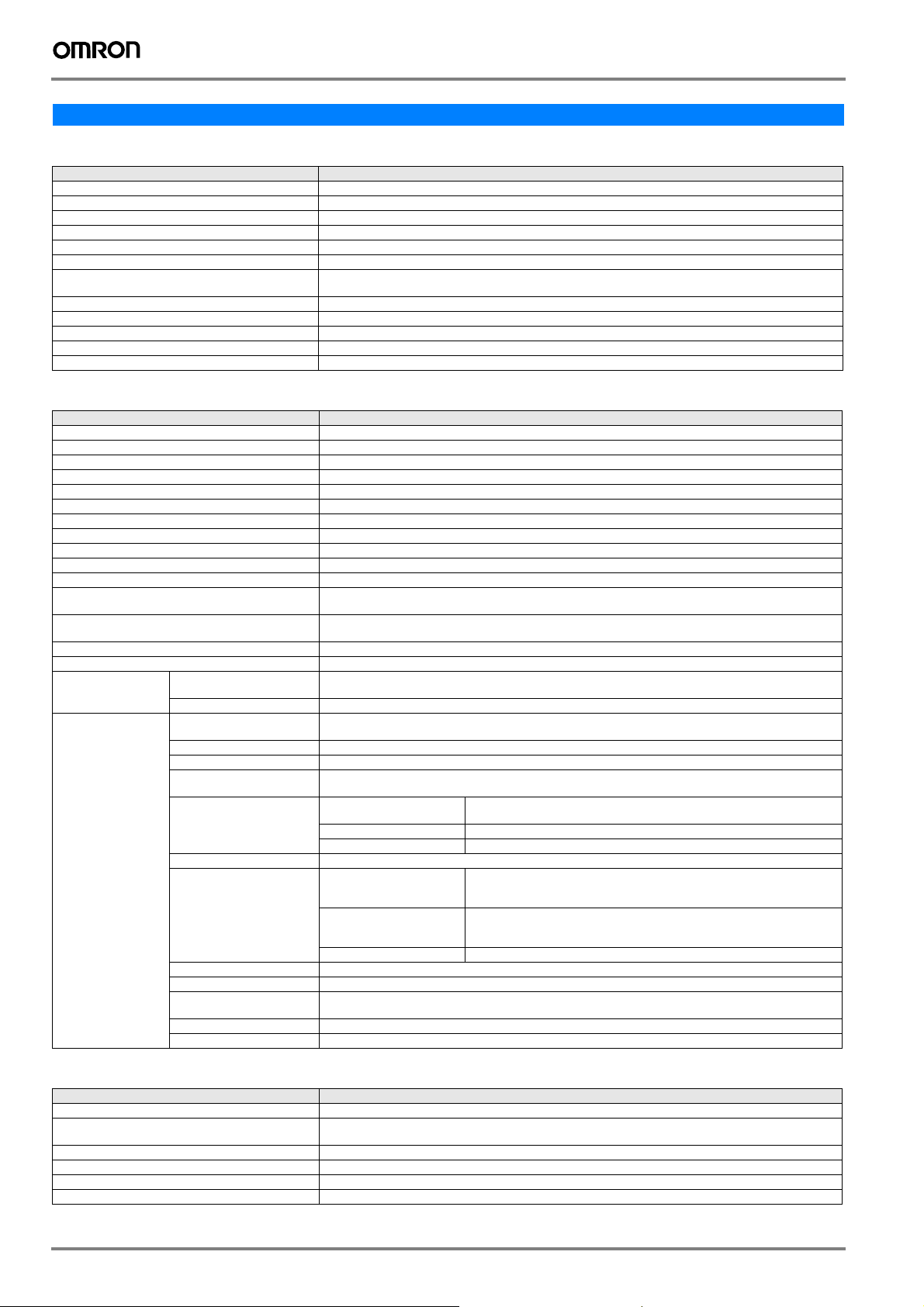
Спецификация за поръчки
Общи спецификации
Елемент Подробности
Модел TJ1-@
Температура на околната среда при работа 0 до 55°C
Влажност на околната среда при работа 10 до 90% (относителна)
Температура на съхранение –20 до 70°C
Влажност при съхранение 90% макс. (не се допуска кондензация)
Атмосфера Отсъствие на корозивни газове
Устойчивост на вибрации 10 до 57 Hz: (амплитуда 0.075 mm)
Устойчивост на удар 143 m/s
Изолационно съпротивление 20 MOhm
Диелектрична якост 500 Волта
Защитна структура IP20
Международни стандарти CE, EN 61131-2 и RO (в процес на одобряване за cULus и Lloyds)
Ускорение 57 до 100 Hz: 9,8 m/s
2
, 3 пъти за всяка от X, Y и Z посоките.
Модул за управление на електрозадвижването
Елемент Подробности
Модел TJ1-MC16
Брой на осите 16
Брой на инверторите и входно/изходните модули Макс. 8
Брой на главните устройства в Mechatrolink-II Могат да бъдат свързани до 4 главни устройства Mechatrolink-II (TJ1-ML16, виж по-долу)
Време на цикъла По избор 0,5 ms, 1 ms или 2 ms
Език за програмиране BASIC-базиран език
Многозадачност Могат да се изпълняват едновременно до 14 задачи
Цифрови входове/изходи 16 входа и 8 изхода, които могат да се конфигурират свободно
Мерни единици Дефинират се от потребителя
Памет, за потребителски програми 500 KB
Обем на паметта До 2 MB флаш памет за данни
Съхраняване на програмни данни в контролера за
електрозадвижване
Съхранение на програмните данни в компютър Софтуерният пакет Trajexia Motion Perfect поддържа архивно копие върху твърдия диск на
Комуникационни портове 1 Ethernet порт и 2 серийни порта
Актуализация на фърмуера С помощта на софтуерния пакет Trajexia
Ethernet порт Електрически
Сериен порт Електрически
характеристики
Куплунг Ethernet куплунг - RJ45
характеристики
Куплунг Куплунг тип SUB-D9 (съответстващия му е включен в окомплектовката)
Синхоринизиране Синхронизиране тип старт/стоп (асинхронно)
Скорост на предаване на
данните
Формат на обмена Дължина на данните в
Режим на обмена От една точка към много (1:N)
Протокол на обмена RS-232C (1:1) Host Link главен протокол,
Галванично развързване RS422A порт
Буфери за комуникация 254 байта
Контрол върху потока
данни
Терминатор Да, избира се чрез превключвател
Дължина на кабела 15 m за RS232 и 500 m за RS422/485
SRAM подсигурена с батерия и Flash-ROM
персонален компютър.
Съответствие с IEEE 802.3 (100BaseT)
Включва 1 порт RS232C и 1 порт RS485/RS422A (избираеми с превключвател)
1200 / 2400 / 4800 / 9600 / 19200 / 38400 bps
битове
Стоп битове 1 или 2 бита
Бит за контрол по четност Четност/нечетност/без контрол
RS-422A (1:N) Host-link главен протокол,
RS-485 (1:N) ASCII с общо предназначение
Без
2
в X, Y и Z посоки в продължение на 80 минути.
7 или 8 бита
Host Link подчинен протокол,
ASCII с общо предназначение
Host-link подчинен протокол,
ASCII с общо предназначение
Главно устройство на MECHATROLINK-II
Елемент Спецификации
Модел TJ1-ML16
Устройства, управлявани по Mechatrolink-II
интерфейс
Електрически характеристики Съответствие със стандарта MECHATROLINK
Комуникационни портове 1 Главно устройство на MECHATROLINK-II
Скорост на обмена 10 Mbps
Цикъл на комуникация 0,5 ms, 1 ms или 2 ms
Серво задвижвания Sigma-2 и Sigma-3, различни входно/изходни модули и честотни инвертори V7,
F7 и G7
2 Управление на електрозадвижването
Page 3

Елемент Спецификации
Тип на подчинените станции Оси или серво задвижвания
Брой на подчинените станции за едно главно
устройство / Продължителност на цикъла
Разстояние на обмена Макс. 50 m, без използване на повторител
Честотни инвертори
Входно/изходни модули
Макс. 16 станции / 2 ms
Макс. 8 станции / 1 ms
Макс. 4 станции / 0.5 ms (само за серво задвижвания Sigma-3)
Подчинено устройство тип Profibus
Елементи Спецификации
Модел TJ1-PRT
Стандарт PROFIBUS Съответствие със стандарт EN50170 (DP-V0) на PROFIBUS-DP
Комуникационни портове 1 PROFIBUS-DP подчинено
Скорост на обмена 9,6, 19,2, 45,45, 93,75, 187,5, 500, 1500, 3000, 6000 и 12000 kbps
Брой на възлите 0 äî 99
Входно/изходно адресно пространство Възможност за конфигуриране в двете посоки на адресно поле от 0 до 122 думи (16-битови)
Галванично развързване Да
Устройство с гъвкава ос
Елементи Спецификации
Модел TJ1-FL02
Брой на осите 2
Метод за управление ±10V аналогов изход в затворен контур или изходна импулсна поредица в отворен контур
Енкодер Обратна връзка по позиция/скорост 2 инкрементален и абсолютен енкодери
Допълнителни входове/изходи 2 бързи регистриращи входа, 2 дефинируеми входа, 2 изхода за разрешение, 4 изхода на позиционни
Галванично развързване Да
Поддържане на стандартите за
абсолютен енкодер
Максимална входна честота на
енкодера
Максимална изходна честота на
енкодера/импулсната поредица
SSI, EnDat и Tamagawa
6 MHz
2 MHz
превключватели или изходи за ресетиране на осите
Управление на
електрозадвижването
Номенклатура
Управляващо устройство Trajexia Motion - TJ1-MC16
Светодиоди
Отделение
за батерията
Куплунг към
цифровите
входове/изходи
Дисплей
Ethernet порт
Превключватели за RS422A/RS485
Серийни портове RS-232C и RS422A/485
Trajexia - контролер за електрозадвижване 3
Page 4

Главно устройство Trajexia Mechatrolink-II - TJ1-ML16
Подчинено устройство Trajexia PROFIBUS-DP - TJ1-PRT
Светодиоди на устройството
Светодиоди на устройството
Главен порт на MECHATROLINK-II
Избор на възел
PROFIBUS
PROFIBUS-DP подчинен порт
4 Управление на електрозадвижването
Page 5

Размери (mm)
Контролер за електрозадвижване Trajexia- TJ1-MC16 Модули на Trajexia - TJ1-ML16, TJ1-PRT, TJ1-FL02
Управление на
електрозадвижването
94
65
62
71
70.3
90
Система Trajexia - CJ1W-PA202 + TJ1-MC16 + един модул + TJ1-TER
65
PA2 02
31
39.9
94
70.30
90
90
94
62
3145
29.7
Информаци
Захранване
Контролер
на движение
Управление
на осите
Подчинено
устройство
за комуникация
Контролер за електрозадвижване Trajexia
Име Модел
Контролер за електрозадвижване Trajexia. (включен е крайния модул Trajexia TJ1-TER) TJ1-MC16
Захранване 100-240V AC за система Trajexia CJ1W-PA202
Захранване 24V DC за система Trajexia CJ1W-PD022
Краен модул
(включен в контролера за
електрозадвижване)
Trajexia - контролер за електрозадвижване 5
Page 6

Trajexia - Модули за управление на оси
Име Модел
Главно устройство на Trajexia MECHATROLINK-II (до 16 оси) TJ1-ML16
Устройство с гъвкава ос на Trajexia (за 2 оси) TJ1-FL02
Trajexia -
Име Модел
Подчинено устройство Trajexia PROFIBUS-DP TJ1-PRT
Комуникационни модули
Mechatrolink-II – Съвместими устройства
Име Забележки Модел
Разпределени входно/изходни
модули
Кабели за Mechatrolink-II 0,5 m JEPMC-W6003-A5
Терминатор за Mechatrolink-II Терминиращо съпротивление JEPMC-W6022
MECHATROLINK-II интерфейсен
модул
64-точков цифров вход и 64-точков цифров изход (24V DC) JEPMC-IO2310
Аналогов вход –10V до +10V, 4 канала JEPMC-AN2900
Аналогов изход –10V до +10V, 2 канала JEPMC-AN2910
1 m JEPMC-W6003-01
3 m JEPMC-W6003-03
5 m JEPMC-W6003-05
10 m JEPMC-W6003-10
20 m JEPMC-W6003-20
30 m JEPMC-W6003-30
За серво задвижвания от серия Sigma-II. (Версия на фърмуера 39 или по-късна) JUSP-NS115
За инвертор Varispeed V7
(относно поддържаните версии на инвертори се свържете с офиса за продажби на Omron)
За инвертори Varispeed V7, G7
(относно поддържаните версии на инвертори се свържете с офиса за продажби на Omron)
SI-T/V7
SI-T
Входно/изходни кабели
Входно/изходен кабел за JEPMCIO2310
Забележки Дължина (m) Модел
Със съединител от страна на IO2310 0.5 JEPMC-W5410-05
1.0 JEPMC-W5410-10
3.0 JEPMC-W5410-30
Серво система и честотни инвертори
Бележка:Направете справка с каталога Motion & Drives относно спецификациите и как да поръчате
Софтуер за компютъра
Спецификации Модел
Trajexia Motion Perfect и CX-Drive V1.2 или по-висока Инструменти TJ1
Cat. No. I53E-BG-01
В интерес подобряването на продукта, спецификациите подлежат на промяна без
уведомяване.
Bulgaria
GEMAMEX PRIVATE CO.
Lozenez 4
1421 Sofia
BULGARIA
phone: + 359 - 29 63 17 28
fax: + 359 - 29 63 00 69
gemamex@dir.bg
www.gemamex.com
SIMEL LTD.
Bul. Rouse 37A
5800 Pleven
BULGARIA
phone: + 359 - 64 80 21 86
fax: + 359 - 64 80 03 18
simel@infotel.bg
Macedonia
NIK SISTEMI
Bul. J. Sandanski 12, La.5, Lo. 3
1000 Skopje
MACEDONIA
phone: + 389 - 22 46 13 09
fax: + 389 - 22 40 08 58
www.nik.com.mk
nik@nik.com.mk
6 Управление на електрозадвижването
 Loading...
Loading...