

Page 1

Cat. No.
I51E-IT-03
Sistema di controllo assi Trajexia
TJ1-MC04, TJ1-MC16, TJ1-ML04, TJ1-ML16, TJ1-PRT, TJ1-DRT, TJ1-FL02
MANUALE DI RIFERIMENTO HARDWARE
Page 2
Avviso
I prodotti OMRON sono destinati all'uso in accordo con le
procedure appropriate da parte di un operatore qualificato
e solo per gli scopi descritti in questo manuale.
In questo manuale vengono utilizzate le seguenti convenzioni
per indicare e classificare le precauzioni. Attenersi sempre alle
istruzioni fornite. La mancata osservanza di tali precauzioni
potrebbe causare lesioni o danni a cose e persone.
Definizione delle informazioni precauzionali
PERICOLO
Indica una situazione di immediato pericolo che, se non evitata,
sarà causa di lesioni gravi o mortali.
AVVERTENZA
Indica una situazione di potenziale pericolo che, se non evitata,
può essere causa di lesioni gravi o mortali.
/i
Attenzione
Indica una situazione di potenziale pericolo che, se non evitata,
può essere causa di danni o lesioni non gravi a persone o cose.
Marchi e copyright
PROFIBUS è un marchio registrato di PROFIBUS International.
MECHATROLINK è un marchio registrato di Yaskawa Corporation.
Revisione 3.0
DeviceNet è un marchio registrato di Open DeviceNet Vendor Assoc INC.
CIP è un marchio registrato di Open DeviceNet Vendor Assoc INC.
Trajexia è un marchio registrato di OMRON.
Motion Perfect è un marchio registrato di Trio Motion Technology Ltd.
MANUALE DI RIFERIMENTO HARDWARE 2
© OMRON, 2007
Tutti i diritti riservati. Nessuna parte della presente pubblicazione può essere riprodotta,
memorizzata in un sistema, trasmessa in qualsivoglia formato o mezzo, meccanico,
elettronico, tramite fotocopia, registrazione o altro, senza previo consenso scritto di OMRON.
Non viene assunta alcuna responsabilità brevettuale in relazione all'uso delle informazioni
contenute nel presente manuale. Inoltre, poiché OMRON è alla costante ricerca della migliore
qualità per i propri prodotti, le informazioni contenute nel presente manuale sono soggette
a modifiche senza preavviso. Sebbene il presente manuale sia stato redatto con la massima
attenzione, OMRON non si assume alcuna responsabilità in relazione ad eventuali errori od
omissioni, né alcuna responsabilità in relazione ad eventuali danni derivanti dalle informazioni
in esso contenute.
Page 3
Informazioni sul manuale
Il presente manuale descrive le procedure di installazione e funzionamento
del sistema di controllo assi Trajexia.
Leggere attentamente il presente manuale e i manuali correlati elencati nella
tabella riportata di seguito e assicurarsi di avere compreso le informazioni
fornite prima di procedere all'installazione o all'azionamento delle unità
di controllo assi Trajexia. Accertarsi di leggere attentamente le precauzioni
fornite nella sezione successiva.
/i
Nome N. cat. Contenuto
Sistema di controllo
assi Trajexia
MANUALE DI
AVVIO RAPIDO
Sistema di controllo
assi Trajexia
MANUALE DI
RIFERIMENTO
HARDWARE
Sistema di controllo
assi Trajexia
MANUALE DI
PROGRAMMAZIONE
Manuale del
servoazionamento
Sigma-II
Manuale dei
servoazionamenti
della serie JUNMA
Revisione 3.0
Manuale JUSP-NS115 SIEP C71080001 Descrive le procedure di installazione
I50E Descrive come apprendere
rapidamente il funzionamento
di Trajexia, spostando un singolo
asse mediante MECHATROLINK-II,
in una configurazione di prova.
I51E Descrive la procedura di installazione
e le specifiche hardware delle unità
Trajexia, nonché la filosofia del
sistema Trajexia.
I52E Descrive i comandi BASIC
da utilizzare per la programmazione
di Trajexia, descrive i protocolli
di comunicazione e il software
Trajexia Tools, fornisce esempi
pratici e informazioni per
la risoluzione dei problemi.
SIEP S800000 15
TOEP-C71080603 01-OY
Descrive le procedure di installazione
e funzionamento dei servoazionamenti
Sigma-II.
Descrive le procedure di installazione
e funzionamento dei servoazionamenti
JUNMA.
e funzionamento del modulo
applicativo MECHATROLINK-II.
Nome N. cat. Contenuto
Manuale di Sigma-III
con interfaccia
MECHATROLINK
Inverter V7 TOEP C71060605 02-OY Descrive le procedure di installazione
Inverter F7Z TOE S616-55 1-OY Descrive le procedure di installazione
Inverter G7 TOE S616-60 Descrive le procedure di installazione
Interfaccia SI-T
MECHATROLINK per
gli inverter G7 e F7
Interfaccia ST-T/V7
MECHATROLINK
per gli inverter V7
Moduli di I/O
MECHATROLINK
Comandi di
comunicazione delle
serie SYSMAC CS/CJ
SIEP S800000 11
SIBP-C730600-08 Descrive le procedure di installazione
SIBP-C730600-03 Descrive le procedure di installazione
SIE C887-5 Descrive le procedure di installazione
W342 Descrive il protocollo di
Descrive le procedure di installazione
e funzionamento dei servoazionamenti
Sigma-III con l'interfaccia
MECHATROLINK.
e funzionamento degli inverter V7.
e funzionamento degli inverter F7Z.
e funzionamento degli inverter G7.
e funzionamento delle interfacce
MECHATROLINK per gli inverter
G7 ed F7.
e funzionamento delle interfacce
MECHATROLINK per gli inverter V7.
e funzionamento dei moduli di
ingresso e uscita MECHATROLINK
e del ripetitore MECHATROLINK-II.
comunicazione e i comandi FINS.
AVVERTENZA
La mancata lettura o comprensione delle informazioni fornite
in questo manuale può procurare lesioni personali, anche mortali,
danneggiare il prodotto o causarne un funzionamento non corretto.
Leggere ogni sezione per intero e accertarsi di avere compreso
le informazioni in essa contenute e quelle delle sezioni correlate
prima di eseguire una delle procedure o operazioni descritte.
MANUALE DI RIFERIMENTO HARDWARE 3
Page 4
Funzioni supportate dalle versioni dell'unità
Durante lo sviluppo di Trajexia, nuove funzionalità sono state aggiunte
all'unità di controllo dopo il rilascio sul mercato.
Tali funzionalità sono implementate nel firmware e/o nell'FPGA dell'unità
di controllo.
Nella tabella riportata di seguito, viene descritta la funzionalità applicabile
in relazione alla versione del firmware e dell'FPGA dell'unità TJ1-MC__.
/i
Funzionalità Versione del firmware
di TJ1-MC_
Supporto completo
di TJ1-FL02
Supporto dei comandi
BASIC FINS_COMMS
Supporto di TJ1-DRT V1.6509 Tutte le versioni
Supporto di TJ1-MC04
eTJ1-ML04
V1.6509 21 e successive
V1.6509 Tutte le versioni
V1.6607 21 e successiva
Versione dell'FPGA
di TJ1-MC__
Verificare le versioni del firmware e dell'FPGA dell'unità TJ1-MC__
Collegare TJ1-MC__ al software Trajexia Tools. Vedere il Manuale
di programmazione.
Aprire la finestra “terminal” e digitare i seguenti comandi:
Nella finestra terminal, digitare
PRINT VERSION
. Il parametro della versione
restituisce il numero di versione corrente del firmware dell'unità di controllo assi.
Nella finestra terminal, digitare
PRINT FPGA_VERSION SLOT(-1)
. Il parametro
restituisce il numero di versione corrente dell'FPGA di TJ1-MC__.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 4
Page 5
Sommario
1 Avvertenze e precauzioni di sicurezza .......................................................................................................................................................8
1.1 Destinatari del manuale ....................................................................................................................................................................................................................8
1.2 Precauzioni generali .........................................................................................................................................................................................................................8
1.3 Precauzioni di sicurezza ...................................................................................................................................................................................................................8
1.4 Precauzioni relative all'ambiente operativo.......................................................................................................................................................................................9
1.5 Precauzioni relative all'applicazione ...............................................................................................................................................................................................10
1.6 Precauzioni per l'assemblaggio dell'unità .......................................................................................................................................................................................13
1.7 Conformità alle direttive dell'Unione Europea.................................................................................................................................................................................13
1.7.1 Principi..............................................................................................................................................................................................................................13
1.7.2 Conformità alle direttive dell'Unione Europea ..................................................................................................................................................................13
2 Filosofia del sistema................................................................................................................................................................................... 14
2.1 Introduzione ....................................................................................................................................................................................................................................14
2.2 Concetti di controllo assi .................................................................................................................................................................................................................16
2.2.1 Controllo PTP ...................................................................................................................................................................................................................17
2.2.2 Controllo CP .....................................................................................................................................................................................................................20
2.2.3 Controllo EG .....................................................................................................................................................................................................................22
2.2.4 Altre operazioni.................................................................................................................................................................................................................25
2.3 Principi del servosistema ................................................................................................................................................................................................................27
2.4 Architettura del sistema Trajexia ...................................................................................................................................................................................................30
2.5 Tempo di ciclo ................................................................................................................................................................................................................................31
2.6 Controllo del programma e multitasking .........................................................................................................................................................................................37
2.7 Sequenza del movimento e assi .....................................................................................................................................................................................................40
2.7.1 Generatore di profili..........................................................................................................................................................................................................41
2.7.2 Anello di posizione............................................................................................................................................................................................................41
2.7.3 Sequenza dell'asse ..........................................................................................................................................................................................................41
2.7.4 Tipo di asse ......................................................................................................................................................................................................................41
2.8 Buffer di movimento .......................................................................................................................................................................................................................48
2.9 Sistema meccanico.........................................................................................................................................................................................................................50
3 Riferimento hardware .................................................................................................................................................................................51
3.1 Introduzione ....................................................................................................................................................................................................................................51
3.1.1 Caratteristiche distintive di Trajexia .................................................................................................................................................................................52
3.1.2 Trajexia Tools...................................................................................................................................................................................................................53
3.1.3 Questo manuale ...............................................................................................................................................................................................................53
3.2 Tutte le unità ..................................................................................................................................................................................................................................54
3.2.1 Installazione del sistema ..................................................................................................................................................................................................54
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 5
3.2.2 Condizioni ambientali e di stoccaggio per tutte le unità ...................................................................................................................................................61
3.2.3 Dimensioni delle unità .....................................................................................................................................................................................................62
3.2.4 Cablaggio dei connettori Weidmüller................................................................................................................................................................................64
Page 6
Sommario
Revisione 3.0
3.3 Modulo di alimentazione .................................................................................................................................................................................................................66
3.3.1 Introduzione......................................................................................................................................................................................................................66
3.3.2 Collegamenti del PSU ......................................................................................................................................................................................................66
3.3.3 Caratteristiche del PSU ....................................................................................................................................................................................................67
3.3.4 Contenuto della confezione del PSU................................................................................................................................................................................67
3.4 TJ1-MC__ ......................................................................................................................................................................................................................................68
3.4.1 Introduzione......................................................................................................................................................................................................................68
3.4.2 Display a LED...................................................................................................................................................................................................................69
3.4.3 Collegamenti di TJ1-MC__ ...............................................................................................................................................................................................70
3.4.4 Batteria .............................................................................................................................................................................................................................76
3.4.5 Caratteristiche di TJ1-MC__.............................................................................................................................................................................................77
3.4.6 TJ1-TER ...........................................................................................................................................................................................................................78
3.4.7 Contenuto della confezione di TJ1-MC__ ........................................................................................................................................................................78
3.5 TJ1-ML__........................................................................................................................................................................................................................................79
3.5.1 Introduzione......................................................................................................................................................................................................................79
3.5.2 Descrizione dei LED .........................................................................................................................................................................................................80
3.5.3 Collegamento di TJ1-ML__ ..............................................................................................................................................................................................80
3.5.4 Caratteristiche di TJ1-ML__ .............................................................................................................................................................................................84
3.5.5 Contenuto della confezione di TJ1-ML__ .........................................................................................................................................................................85
3.5.6 Servoazionamenti MECHATROLINK-II serie Sigma-II.....................................................................................................................................................85
3.5.7 Servoazionamenti MECHATROLINK-II serie Junma .......................................................................................................................................................92
3.5.8 Scheda MECHATROLINK-II per inverter V7 ....................................................................................................................................................................98
3.5.9 Inverter F7 e G7 di MECHATROLINK-II.........................................................................................................................................................................102
3.5.10 Moduli slave di I/O digitali MECHATROLINK-II .............................................................................................................................................................107
3.5.11 Modulo di ingresso analogico a 4 canali MECHATROLINK-II ........................................................................................................................................117
3.5.12 Modulo di uscita analogica a 2 canali MECHATROLINK-II ............................................................................................................................................123
3.5.13 Ripetitore MECHATROLINK-II .......................................................................................................................................................................................128
3.6 TJ1-PRT .......................................................................................................................................................................................................................................131
3.6.1 Introduzione....................................................................................................................................................................................................................131
3.6.2 Descrizione dei LED .......................................................................................................................................................................................................131
3.6.3 Selettori del numero di nodo...........................................................................................................................................................................................132
3.6.4 Collegamenti di TJ1-PRT ...............................................................................................................................................................................................132
3.6.5 Caratteristiche di TJ1-PRT ............................................................................................................................................................................................133
3.6.6 Contenuto della confezione di TJ1-PRT.........................................................................................................................................................................133
3.7 TJ1-DRT .......................................................................................................................................................................................................................................134
3.7.1 Introduzione....................................................................................................................................................................................................................134
3.7.2 Descrizione dei LED ......................................................................................................................................................................................................134
3.7.3 Selettori del numero di nodo...........................................................................................................................................................................................135
3.7.4 Collegamenti di TJ1-DRT ...............................................................................................................................................................................................136
3.7.5 Caratteristiche di TJ1-DRT .............................................................................................................................................................................................137
3.7.6 Contenuto della confezione di TJ1-DRT.........................................................................................................................................................................137
MANUALE DI RIFERIMENTO HARDWARE 6
Page 7
Sommario
3.8 TJ1-FL02 ......................................................................................................................................................................................................................................138
3.8.1 Introduzione....................................................................................................................................................................................................................138
3.8.2 Descrizione dei LED .......................................................................................................................................................................................................139
3.8.3 Collegamenti di TJ1-FL02 ..............................................................................................................................................................................................140
3.8.4 Caratteristiche di TJ1-FL02 ............................................................................................................................................................................................146
3.8.5 Encoder incrementale.....................................................................................................................................................................................................147
3.8.6 Encoder assoluto............................................................................................................................................................................................................149
3.8.7 Passo-passo...................................................................................................................................................................................................................153
3.8.8 Registrazione..................................................................................................................................................................................................................153
3.8.9 Hardware PSWITCH ......................................................................................................................................................................................................154
3.8.10 Contenuto della confezione di TJ1-FL02........................................................................................................................................................................154
A Differenze tra Sigma-II e Junma .............................................................................................................................................................. 162
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 7
Page 8
Avvertenze e precauzioni di sicurezza
1 Avvertenze e precauzioni di sicurezza
1.1 Destinatari del manuale
Il presente manuale è destinato a personale qualificato nella
gestione di impianti elettrici (elettrotecnici o equivalenti), responsabile
della progettazione, installazione e gestione di sistemi e strutture
di automazione industriale.
1.2 Precauzioni generali
L'utente deve utilizzare il prodotto in base alle specifiche riportate
nel presente manuale.
Prima di utilizzare il prodotto in condizioni non descritte nel manuale
o di applicarlo a sistemi di controllo nucleare, sistemi ferroviari, sistemi per
l'aviazione, veicoli, apparecchiature di sicurezza, stabilimenti petrolchimici
e qualunque altro sistema, macchina o apparecchiatura, il cui utilizzo errato
può avere un serio impatto sull'incolumità di persone o l'integrità di cose,
rivolgersi al proprio rappresentante OMRON.
1.3 Precauzioni di sicurezza
AVVERTENZA
Non cortocircuitare i terminali positivo e negativo delle batterie.
Non caricare le batterie, né smontarle, deformarle sottoponendole
a pressione o gettarle nel fuoco.
Le batterie potrebbero esplodere, incendiarsi o perdere liquido.
AVVERTENZA
Il cliente è tenuto a implementare meccanismi di sicurezza
per guasti ed errori allo scopo di garantire la sicurezza in caso
di segnali errati, mancanti o anomali provocati da guasti a carico
delle linee di segnale, cadute di tensione temporanee o altre cause.
Disattendere queste precauzioni potrebbe essere causa di gravi
incidenti.
AVVERTENZA
È responsabilità del cliente provvedere all'installazione sotto forma
di circuiti esterni, ovvero esterni all'unità di controllo assi Trajexia,
di circuiti di arresto di emergenza, circuiti di interblocco, circuiti
di finecorsa e altre misure di sicurezza analoghe.
Disattendere queste precauzioni potrebbe essere causa di gravi
incidenti.
AVVERTENZA
Non tentare di aprire l'unità e non toccarne le parti interne
in presenza di alimentazione.
Tali azioni comportano il rischio di scosse elettriche.
AVVERTENZA
Non toccare i terminali o le morsettiere quando il sistema
è alimentato.
Tali azioni comportano il rischio di scosse elettriche.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 8
AVVERTENZA
Quando si verifica il sovraccarico o il cortocircuito dell'uscita
a 24 Vc.c. (alimentazione I/O dell'unità TJ1), potrebbe verificarsi
un abbassamento di tensione e una conseguente disattivazione
delle uscite. Come soluzione a tali problemi, il sistema deve
essere dotato di misure di sicurezza esterne.
AVVERTENZA
In caso di sovraccarico dei transistor di uscita (protezione), le uscite
dell'unità TJ1 vengono disattivate. Come soluzione a tali problemi,
il sistema deve essere dotato di misure di sicurezza esterne.
Page 9

Avvertenze e precauzioni di sicurezza
Revisione 3.0
AVVERTENZA
L'unità TJ1 disattiverà il WDOG nel caso in cui la relativa funzione
di autodiagnostica rilevi un errore. Come soluzione a tali problemi,
il sistema deve essere dotato di misure di sicurezza esterne.
AVVERTENZA
Applicare adeguate misure di sicurezza ai circuiti esterni, ovvero
non interni all'unità di controllo assi Trajexia (definita “TJ1”),
in modo da garantire la massima sicurezza in caso di anomalie
dovute a errore di funzionamento dell'unità TJ1 o ad altri fattori
esterni che influiscono sul funzionamento di TJ1.
Disattendere queste precauzioni potrebbe essere causa di gravi
incidenti.
AVVERTENZA
Non tentare di smontare, riparare o modificare alcuna unità.
Qualsiasi intervento in tal senso potrebbe provocare errori
di funzionamento, incendi o scosse elettriche.
Attenzione
Verificare lo stato di sicurezza sull'unità di destinazione
prima di trasferire un programma o modificare la memoria.
La mancata osservanza di questa precauzione prima
di procedere a tali operazioni comporta il rischio di lesioni.
Attenzione
Per i programmi utente scritti nell'unità di controllo assi non
viene eseguito il backup automatico nella memoria flash di TJ1
(funzione di memoria flash).
Attenzione
Durante il cablaggio dell'alimentazione c.c., fare attenzione
a non invertire la polarità (+/–). Il collegamento errato potrebbe
provocare errori di funzionamento nel sistema.
Attenzione
Serrare le viti sulla morsettiera del modulo di alimentazione,
applicando la coppia specificata in questo manuale.
La presenza di viti allentate può provocare bruciature o errori
di funzionamento.
1.4 Precauzioni relative all'ambiente operativo
Attenzione
Non utilizzare l'unità nei luoghi riportati di seguito.
Disattendere questa precauzione può causare errori
di funzionamento, scosse elettriche o bruciature.
- Luoghi esposti alla luce solare diretta.
- Luoghi con temperature o tassi di umidità fuori dell'intervallo
di valori riportato nelle specifiche.
- Luoghi soggetti a formazione di condensa a causa
di considerevoli escursioni termiche.
- Luoghi esposti a gas corrosivi o infiammabili.
- Luoghi esposti a polvere (in particolare polvere metallica)
o agenti salini.
- Luoghi esposti ad acqua, oli o agenti chimici.
- Luoghi soggetti a urti o vibrazioni.
Attenzione
Prendere misure adeguate e sufficienti quando si installano
sistemi nei luoghi riportati di seguito.
In caso contrario, potrebbero verificarsi errori di funzionamento.
- Luoghi soggetti a elettricità statica o interferenze di altro tipo.
- Luoghi in cui sono presenti forti campi elettromagnetici.
- Luoghi potenzialmente esposti a radioattività.
- Luoghi in prossimità di fonti di alimentazione.
MANUALE DI RIFERIMENTO HARDWARE 9
Page 10
Avvertenze e precauzioni di sicurezza
Attenzione
L'ambiente in cui viene utilizzato il sistema TJ1 può avere
un grande impatto sulla vita utile e sull'affidabilità del sistema.
L'utilizzo in ambienti operativi non appropriati può provocare
errori di funzionamento, guasti e altri problemi non prevedibili
nel sistema TJ1.
Accertarsi che l'ambiente operativo rispetti le condizioni richieste
per l'installazione e che tali condizioni siano mantenute per l'intera
vita utile del sistema.
1.5 Precauzioni relative all'applicazione
AVVERTENZA
Avviare il sistema solo dopo aver verificato che gli assi sono
presenti e sono del tipo corretto.
Il numero degli assi flessibili cambia se durante l'avvio si verificano
errori di rete MECHATROLINK-II oppure se la configurazione
di rete MECHATROLINK-II viene modificata.
AVVERTENZA
Verificare la corretta esecuzione del programma utente prima
di eseguirlo sull'unità.
La mancata verifica del programma può provocare
un funzionamento imprevisto.
Attenzione
Prevedere misure adeguate per garantire che la tensione
e la frequenza nominali della corrente di alimentazione siano
sempre corrette. In particolare, fare molta attenzione in luoghi
dove l'alimentazione è instabile.
Un'alimentazione di corrente impropria può provocare errori
di funzionamento.
Attenzione
Installare interruttori esterni e adottare altre misure di sicurezza
per evitare cortocircuiti nel cablaggio esterno.
Misure insufficienti di protezione da cortocircuiti potrebbero
causare bruciature.
Attenzione
Non applicare ai moduli di ingresso una tensione superiore
alla tensione di ingresso nominale.
Una tensione eccessiva potrebbe causare bruciature.
Attenzione
Non applicare ai moduli di uscita tensioni o carichi superiori
alla corrente di carico massima.
Tensioni o carichi eccessivi potrebbero causare bruciature.
Attenzione
Utilizzare sempre la tensione di alimentazione specificata nel
presente manuale.
Scollegare il terminale di messa a terra funzionale quando
si eseguono i test di tensione di resistenza.
In caso contrario, potrebbero verificarsi bruciature.
Una tensione errata potrebbe provocare errori di funzionamento
Attenzione
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 10
o bruciature.
Page 11
Avvertenze e precauzioni di sicurezza
Attenzione
Quando si installa l’unità, effettuare sempre un collegamento
a terra di classe 3 (a 100Ω o inferiore).
Un collegamento a terra non di classe 3 potrebbe provocare
scosse elettriche.
Attenzione
Spegnere sempre il sistema e scollegare l'alimentazione
prima di eseguire una delle operazioni riportate di seguito.
La mancata interruzione dell'alimentazione potrebbe
provocare errori di funzionamento o scosse elettriche.
- Montaggio o smontaggio di moduli di espansione,
CPU o altre unità.
- Assemblaggio di moduli.
- Impostazione di DIP switch o di selettori rotativi.
- Collegamento o cablaggio di cavi.
- Collegamento o scollegamento di connettori.
Attenzione
Accertarsi che tutte le viti di montaggio, le viti dei morsetti e le viti
dei connettori dei cavi siano serrate in base alla coppia specificata
in questo manuale.
Il serraggio a una coppia non corretta potrebbe provocare errori
di funzionamento.
Attenzione
Una volta completato il cablaggio, rimuovere l'etichetta di protezione
dalla polvere per garantire un'appropriata dispersione del calore.
Lasciare attaccata l'etichetta protettiva potrebbe provocare errori
di funzionamento.
Attenzione
Per il cablaggio utilizzare terminali a crimpare. Non collegare
direttamente ai terminali fili scoperti.
Il collegamento di fili scoperti potrebbe provocare bruciature.
Attenzione
Controllare attentamente il cablaggio di tutti i componenti prima
di attivare l'alimentazione.
Un cablaggio errato può essere causa di bruciature.
Attenzione
Eseguire il cablaggio correttamente.
Un cablaggio errato può essere causa di bruciature.
Attenzione
Montare l'unità solo dopo aver verificato attentamente la morsettiera.
Revisione 3.0
Attenzione
Durante il cablaggio, lasciare l'etichetta di protezione
dalla polvere attaccata all'unità.
La rimozione di tale etichetta potrebbe provocare errori
di funzionamento.
Attenzione
Accertarsi che le morsettiere, le prolunghe e altri componenti
dotati di dispositivi di bloccaggio siano correttamente bloccati
in posizione.
L'errato bloccaggio di questi componenti può causare errori
di funzionamento.
MANUALE DI RIFERIMENTO HARDWARE 11
Page 12

Avvertenze e precauzioni di sicurezza
Revisione 3.0
Attenzione
Prima di cambiare la modalità operativa del sistema,
accertarsi che tale azione non produca effetti negativi
sul sistema. Disattendere questa precauzione potrebbe
provocare un funzionamento imprevisto.
Attenzione
Riavviare il funzionamento solo dopo aver trasferito nella nuova
CPU il contenuto della memoria VR e di tabella, necessario per
il funzionamento.
Disattendere questa precauzione potrebbe provocare
un funzionamento imprevisto.
Attenzione
Quando si sostituiscono componenti, accertarsi che le
caratteristiche tecniche del nuovo componente siano appropriate.
Disattendere questa precauzione può causare errori
di funzionamento o bruciature.
Attenzione
Non tirare o piegare i cavi oltre il limite di resistenza naturale.
Ciò potrebbe provocarne la rottura.
Attenzione
Prima di toccare il sistema, toccare un oggetto metallico con
messa a terra per scaricare l'elettricità statica accumulata.
In caso contrario, potrebbero verificarsi errori di funzionamento
o danni.
Attenzione
I cavi UTP non sono schermati. In ambienti soggetti a interferenze,
utilizzare un sistema con cavo schermato a doppini intrecciati
(STP) e hub appropriati per un ambiente FA.
Non installare cavi a doppini intrecciati su linee ad alta tensione.
Non installare cavi a doppini intrecciati vicino a dispositivi che
generano interferenze.
Non installare cavi a doppini intrecciati in luoghi soggetti a tassi
di umidità elevati.
Non installare cavi a doppini intrecciati in luoghi soggetti a sporco
o polvere eccessivi, nebbia d'olio o altri fattori contaminanti.
Attenzione
Per collegare le unità, utilizzare i cavi di connessione dedicati,
specificati nei manuali dell'operatore.
L'utilizzo di cavi per computer RS-232C disponibili sul mercato
potrebbe provocare guasti ai dispositivi esterni o all'unità
di controllo assi.
Attenzione
È possibile che le uscite restino attivate a causa di errori di
funzionamento delle uscite del transistor incorporato o di altri
circuiti interni.
Come soluzione a tali problemi, il sistema deve essere dotato
di misure di sicurezza esterne.
Attenzione
Quando viene attivata l'alimentazione e se un programma
in BASIC è impostato sulla modalità di esecuzione automatica,
l'unità TJ1 inizierà a funzionare in modalità RUN.
MANUALE DI RIFERIMENTO HARDWARE 12
Page 13
Avvertenze e precauzioni di sicurezza
1.6 Precauzioni per l'assemblaggio dell'unità
Attenzione
Installare l'unità in modo appropriato.
Un'installazione inappropriata dell'unità può comportare errori
di funzionamento.
Attenzione
Accertarsi di montare il modulo TJ1-TER fornito insieme
a TJ1-MC__ nell'unità all'estrema destra.
Se il montaggio del modulo TJ1-TER non è appropriato,
l'unità TJ1 non funzionerà correttamente.
1.7 Conformità alle direttive dell'Unione Europea
1.7.1 Principi
Di seguito sono riportati i principi delle direttive sulla compatibilità
elettromagnetica (EMC) e per le basse tensioni (LVD).
Direttive EMC
I dispositivi OMRON conformi alle direttive dell'Unione Europea sono altresì
conformi agli standard EMC, in modo da poter essere facilmente incorporati
in altri dispositivi o macchine. La conformità dei prodotti agli standard EMC
è stata verificata. Tuttavia, la conformità del prodotto agli standard, una volta
installato nel sistema del cliente, deve essere verificata dal cliente stesso.
Le prestazioni relative agli standard EMC dei dispositivi OMRON conformi
alle direttive dell'Unione Europea variano a seconda della configurazione,
del cablaggio e di altre condizioni dell'apparecchiatura o pannello
di controllo nel quale i dispositivi OMRON sono installati. Pertanto
il cliente deve effettuare i controlli finali per accertarsi che tali dispositivi
e la macchina nel suo complesso siano conformi agli standard EMC.
Revisione 3.0
Direttiva LVD
Accertarsi sempre che i dispositivi che operano nella gamma di tensioni
50–1.000 Vc.a. o 75–1.500 Vc.c. soddisfino gli standard di sicurezza richiesti.
1.7.2 Conformità alle direttive dell'Unione Europea
Le unità di controllo assi Trajexia sono conformi alle direttive dell'Unione
Europea.
Per garantire che la macchina o il dispositivo in cui viene utilizzato
il sistema sia conforme alle direttive dell'Unione Europea, è necessario
soddisfare i seguenti requisiti di installazione del sistema:
1. Il sistema deve essere installato in un pannello di controllo.
2. È necessario utilizzare un isolamento rinforzato o un doppio
isolamento per gli alimentatori c.c. utilizzati per l'alimentazione
dei moduli di comunicazione e di I/O.
MANUALE DI RIFERIMENTO HARDWARE 13
Page 14
Filosofia del sistema
2 Filosofia del sistema
2.1 Introduzione
La filosofia del sistema si basa sulla relazione tra:
• Architettura del sistema
• Tempo di ciclo
• Controllo del programma e multitasking
• Sequenza del movimento e assi
• Buffer di movimento
Una chiara comprensione della relazione tra questi concetti
consente di ottenere i migliori risultati per il sistema Trajexia.
2.1.1 Glossario
Sequenza del movimento
La sequenza del movimento è responsabile del controllo della
posizione degli assi.
Tempo di servoazionamento
Definisce la frequenza alla quale viene eseguita la sequenza
del movimento. Il tempo di servoazionamento deve essere
impostato in base alla configurazione degli assi fisici.
Le impostazioni disponibili sono 0,5 ms, 1 ms o 2 ms.
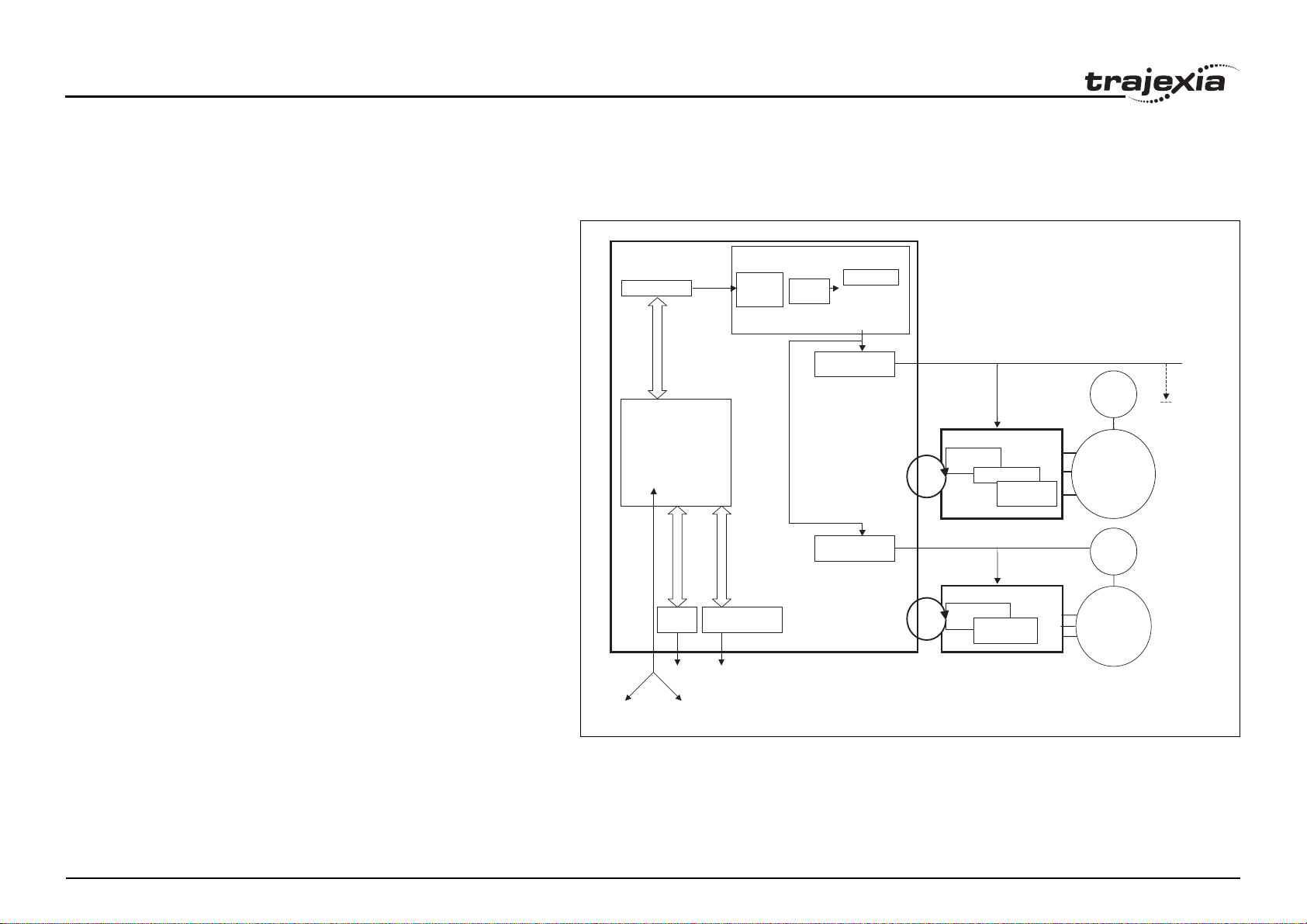
TJ1-MC16
Buffer di programma
PROGRAMMI IN BASIC
Processo 1
Processo 2
Processo 3
…
Processo 14
Com
I/O MC
Ethernet
FINS
Generatore
Generatore
buffer
buffer
e profili
e profili
TJ1-PRT
ANELLO DI CONTROLLO ASSI
TIPO DI ASSE
TIPO DI ASSE
Anello
Anello di
di posizione
posizione
TIPO DI ASSE
TJ1-ML16
-
TJ1 FL02
Fig. 1
Servoazionamento
Anello
di posizione
Anello di velocità
Anello di velocità
Anello di
Anello di coppia
coppia
Servoazionamento
Anello di velocità
Anello di coppia
ENC
Tutti gli altri
servoazionamenti
MOTORE
ENC
MOTORE
Tempo di ciclo
Periodo di tempo necessario per eseguire un ciclo completo
di operazioni nell'unità TJ1-MC__. Il tempo di ciclo è diviso in
INTEGRATI TJ1-ML16
Ethernet
Profibus
Tramite
4 periodi di uguale lunghezza denominati “task CPU”. Il tempo
di ciclo è 1 ms se SERVO_PERIOD è uguale a 0,5 ms o 1 ms
e 2 ms se SERVO_PERIOD è uguale a 2 ms.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 14
Page 15
Filosofia del sistema
Task CPU
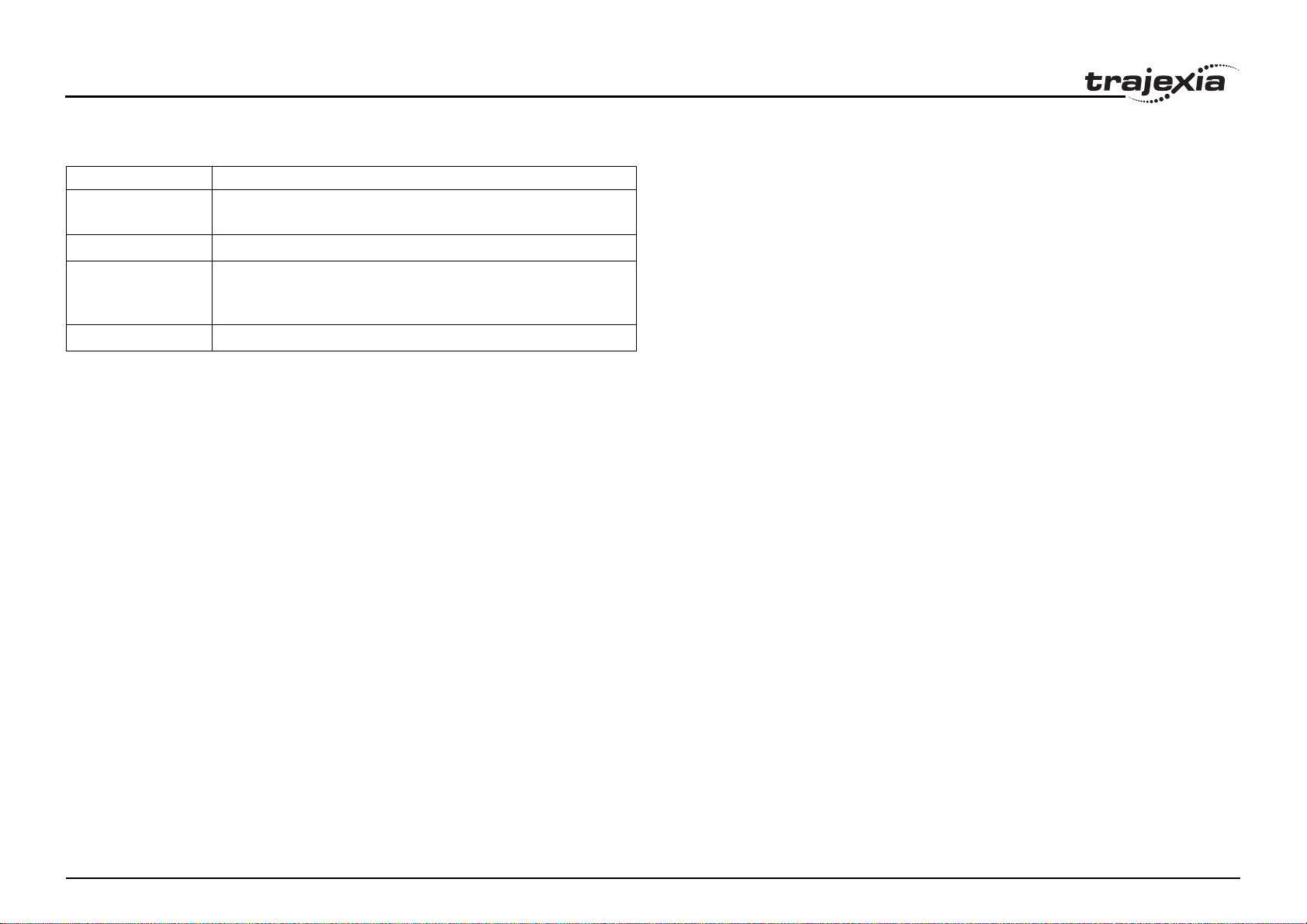
Le operazioni eseguite in ciascun task CPU sono le seguenti.
Task CPU Operazione
Primo task CPU Sequenza del movimento
Processo a bassa priorità
Secondo task CPU Processo ad alta priorità
Terzo task CPU Sequenza del movimento (solo se SERVO_PERIOD = 0,5 ms)
Aggiornamento LED
Processo ad alta priorità
Quarto task CPU Comunicazioni esterne
Programma
Un programma è una parte di codice in BASIC.
Processo
Programma in esecuzione con una determinata priorità assegnata.
I processi 0–12 sono quelli a bassa priorità, mentre quelli 13 e 14
hanno alta priorità. La priorità di processo, alta o bassa, e il numero
del processo, da alto a basso, definiscono il task CPU a cui viene
assegnato il processo.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 15
Page 16
Filosofia del sistema
2.2 Concetti di controllo assi
TJ1-MC__ offre i seguenti tipi di operazioni di controllo
del posizionamento:
1. Controllo punto a punto (PTP)
2. Controllo di movimento (CP)
3. Controllo riduzione elettronica (EG).
In questa sezione vengono descritti alcuni comandi e parametri
utilizzati nella programmazione in BASIC per l'applicazione del
controllo assi.
Sistema di coordinate
Le operazioni di posizionamento eseguite da TJ1-MC__ si basano
su un sistema di coordinate degli assi. TJ1-MC__ converte i dati
della posizione provenienti dal servoazionamento o dall'encoder
connesso in un sistema di coordinate assoluto interno.
L'unità tecnica che specifica le distanze di percorrenza può essere
definita liberamente per ogni singolo asse. La conversione viene
eseguita utilizzando il fattore di conversione dell'unità, definito dal
parametro degli assi
sistema di coordinate è possibile utilizzare il comando
reimposta la posizione corrente su zero o su qualsiasi altro valore.
UNITS
. Per determinare il punto di origine del
DEFPOS
, che
Il movimento può essere assoluto o relativo. Eseguendo un
Fig. 2
movimento assoluto, l'asse (A) viene spostato su una posizione
specifica e predefinita rispetto al punto di origine. Eseguendo
un movimento relativo, l'asse viene spostato dalla posizione
corrente su una posizione relativa rispetto alla posizione
di partenza. La figura mostra un esempio di movimenti lineari
relativi (comando MOVE) e assoluti (comando MOVEABS).
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 16
MOVE(30)
050100
MOVEABS(30)
MOVE(60)
MOVEABS(50)
MOVE(50)
A
Page 17
Filosofia del sistema
2.2.1 Controllo PTP
Nel posizionamento punto a punto (PTP), il movimento
di ciascun asse viene eseguito in modo indipendente dagli
altri assi. TJ1-MC__ supporta le seguenti operazioni:
• Movimento relativo
• Movimento assoluto
• Movimento continuo in avanti
• Movimento continuo indietro
Movimenti assoluti e relativi
Per muovere un singolo asse è possibile utilizzare il comando
MOVE
MOVEABS
caratteristiche di movimento proprie, definite dai parametri degli assi.
Si supponga che un programma di controllo venga eseguito per
spostare dall'origine l’asse n. 0 (A) fino alla coordinata 100 e l’asse
n. 1 (B) fino alla coordinata 50. Se il parametro della velocità
è impostato sullo stesso valore per entrambi gli assi e la velocità
di accelerazione e decelerazione è sufficientemente elevata,
i movimenti degli assi 0 e 1 saranno come quelli mostrati nella figura.
All'inizio, entrambi gli assi 0 e 1 si spostano fino alla coordinata
50 impiegando la stessa quantità di tempo. A questo punto, l'asse
1 si ferma mentre l'asse 0 continua a spostarsi fino a raggiungere
la coordinata 100.
per compiere un movimento relativo oppure il comando
per un movimento assoluto. Ciascun asse dispone di
Fig. 3
B
50
0
50
MOVEABS(100) AXIS(0)
MOVEABS(50) AXIS(1)
100
A
Il movimento di uno specifico asse è determinato dai parametri degli
assi, alcuni dei quali sono descritti nella tabella riportata di seguito.
/i
Parametro Descrizione
UNITS Fattore di conversione dell'unità
ACCEL Velocità di accelerazione di un asse in unità/s
Revisione 3.0
DECEL Velocità di decelerazione di un asse in unità/s
SPEED Velocità richiesta di un asse in unità/s
MANUALE DI RIFERIMENTO HARDWARE 17
2
2
2
Page 18
Filosofia del sistema
Definizione dei movimenti
Il profilo di velocità illustrato in questa figura mostra un'operazione
MOVE
B è la velocità. Il parametro
semplice. L'asse A rappresenta il tempo, mentre l'asse
UNITS
di questo asse è stato definito,
ad esempio, in metri. La velocità massima richiesta è stata impostata
su 10 m/s. Per poter raggiungere questa velocità in un secondo e per
poter decelerare fino all'arresto in un secondo, entrambe le velocità
di accelerazione e decelerazione sono state impostate su 10 m/s
2
.
La distanza totale percorsa è la somma delle distanze percorse
durante le fasi di accelerazione, velocità costante e decelerazione.
Supponendo che la distanza percorsa dal comando
MOVE
sia 40 m,
il profilo di velocità è quello mostrato nella figura.
Fig. 4
10
B
0
123 456
ACCEL = 10
DECEL = 10
SPEED = 10
MOVE(40)
A
I due profili di velocità di queste figure mostrano lo stesso
movimento con rispettivamente un tempo di accelerazione
e un tempo di decelerazione di 2 secondi. Anche in questo
caso, l'asse A rappresenta il tempo, mentre l'asse B è la velocità.
Revisione 3.0
Fig. 5
10
Fig. 6
10
B
0
123 456
B
0
123 456
ACCEL = 5
DECEL = 10
SPEED = 10
MOVE(40)
A
ACCEL = 10
DECEL = 5
SPEED = 10
MOVE(40)
A
MANUALE DI RIFERIMENTO HARDWARE 18
Page 19
Filosofia del sistema
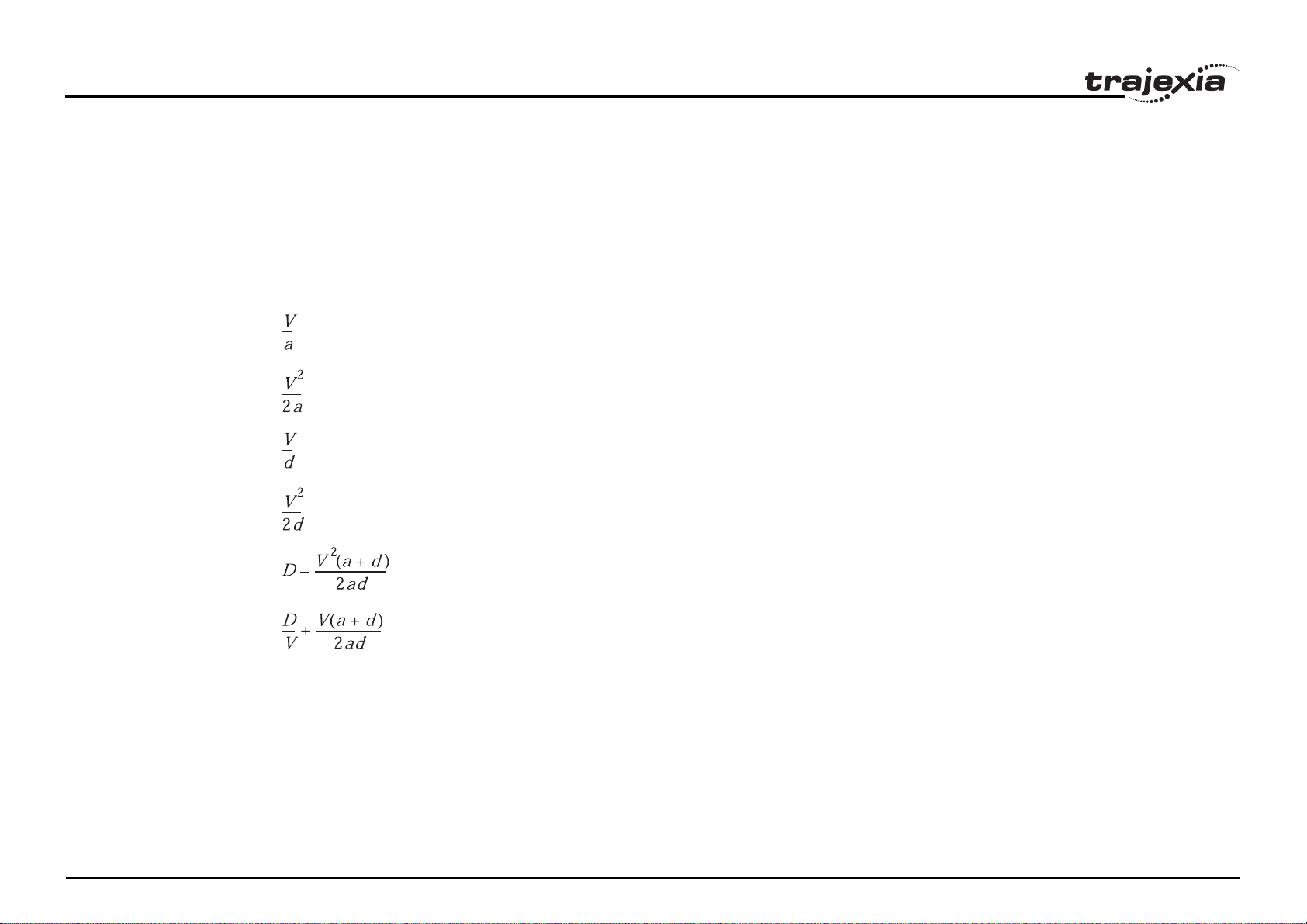
Calcoli del movimento
Utilizzare le equazioni seguenti per calcolare il tempo totale
del movimento degli assi.
• La distanza percorsa per il comando MOVE è D.
• La velocità richiesta è V.
• La velocità di accelerazione è a.
• La velocità di decelerazione è d.
/i
Tempo di accelerazione =
Tratto di accelerazione =
Tempo di decelerazione =
Tratto di decelerazione =
Tratto a velocità costante =
Tempo totale =
Movimenti continui
Per avviare un movimento continuo a una velocità costante per
un determinato asse è possibile utilizzare i comandi
REVERSE
e
. Il comando
FORWARD
consente il movimento
dell'asse in avanti (direzione positiva), mentre il comando
Revisione 3.0
muove l'asse indietro (direzione negativa). A questi comandi vengono
inoltre applicati i parametri degli assi
ACCEL eSPEED
specificare la velocità di accelerazione e la velocità richiesta.
MANUALE DI RIFERIMENTO HARDWARE 19
FORWARD
REVERSE
per
Page 20
Filosofia del sistema
Entrambi i movimenti possono essere annullati utilizzando il comando
CANCEL
di un asse, mentre il comando
tutti gli assi. La velocità di decelerazione è impostata da
o
RAPIDSTOP
. Il comando
RAPIDSTOP
CANCEL
annulla il movimento
annulla i movimenti di
DECEL
.
2.2.2 Controllo CP
Il controllo di movimento (CP) consente di controllare un determinato
tratto compreso tra la posizione iniziale e finale di un movimento
di uno o più assi. TJ1-MC__ supporta le seguenti operazioni:
• Interpolazione lineare
• Interpolazione circolare
• Controllo CAM.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 20
Page 21
Filosofia del sistema
Interpolazione lineare
Nelle applicazioni può essere necessario che un insieme di motori
esegua un'operazione di spostamento da un punto a un altro lungo
una linea retta. I movimenti interpolati linearmente possono verificarsi
tra diversi assi. Per l'interpolazione lineare è possibile utilizzare
anche i comandi
disporranno di più argomenti per specificare lo spostamento
relativo o assoluto di ogni asse.
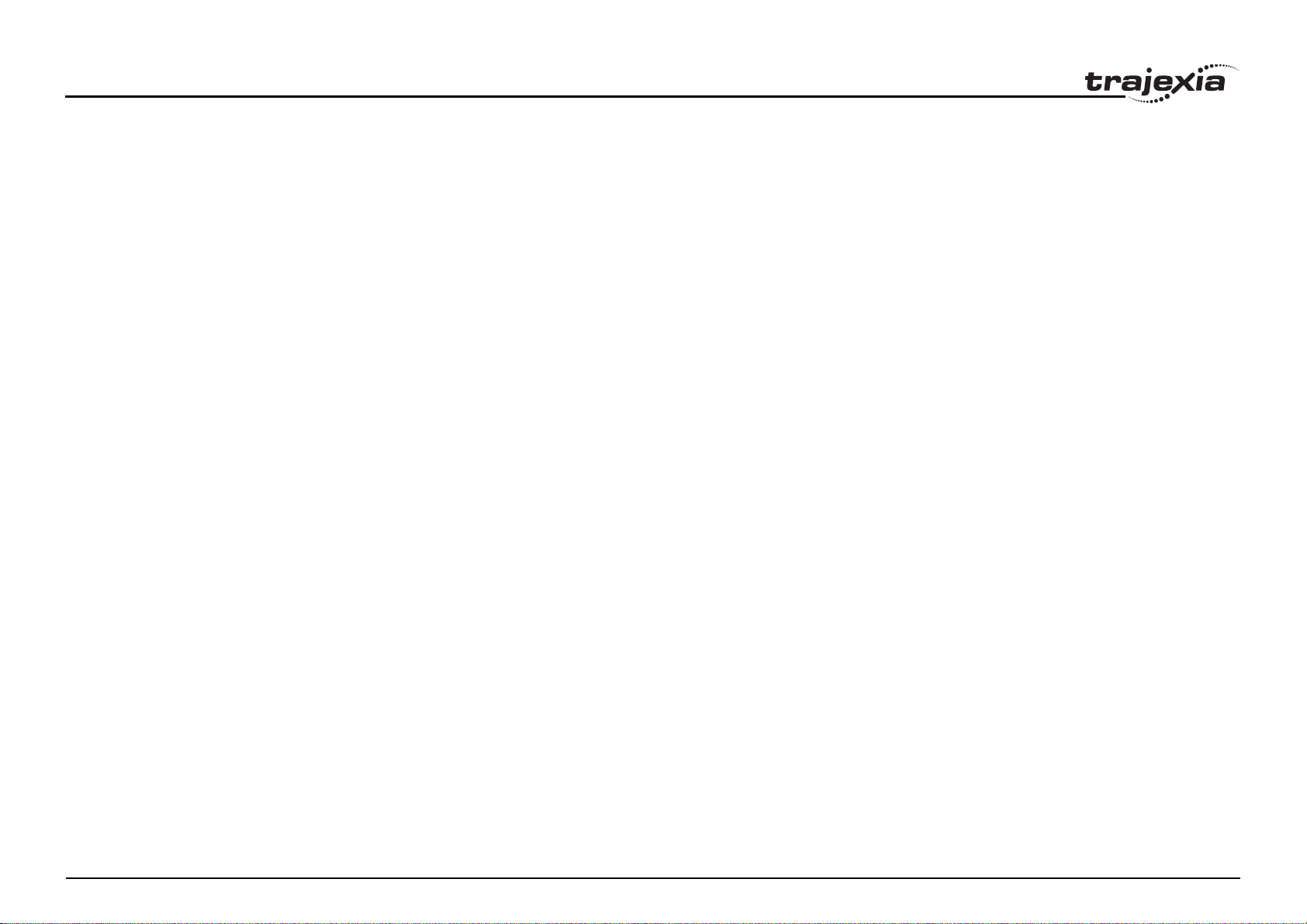
Si consideri il movimento di tre assi in un piano tridimensionale,
come mostrato nella figura. Esso corrisponde al comando
MOVE(50,50,50)
il percorso è mostrato nel diagramma. I tre parametri
ACCEL
e
DECEL
dai parametri corrispondenti dell'asse di base. Il comando
calcola i vari componenti della richiesta di velocità per ciascun asse.
L'asse A rappresenta il tempo, mentre l'asse B è la velocità.
MOVE
e
MOVEABS
. In tal caso, i comandi
. Il profilo della velocità del movimento lungo
SPEED
,
che determinato il movimento a più assi derivano
MOVE
Fig. 7
2
1
3
B
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 21
A
Page 22
Filosofia del sistema
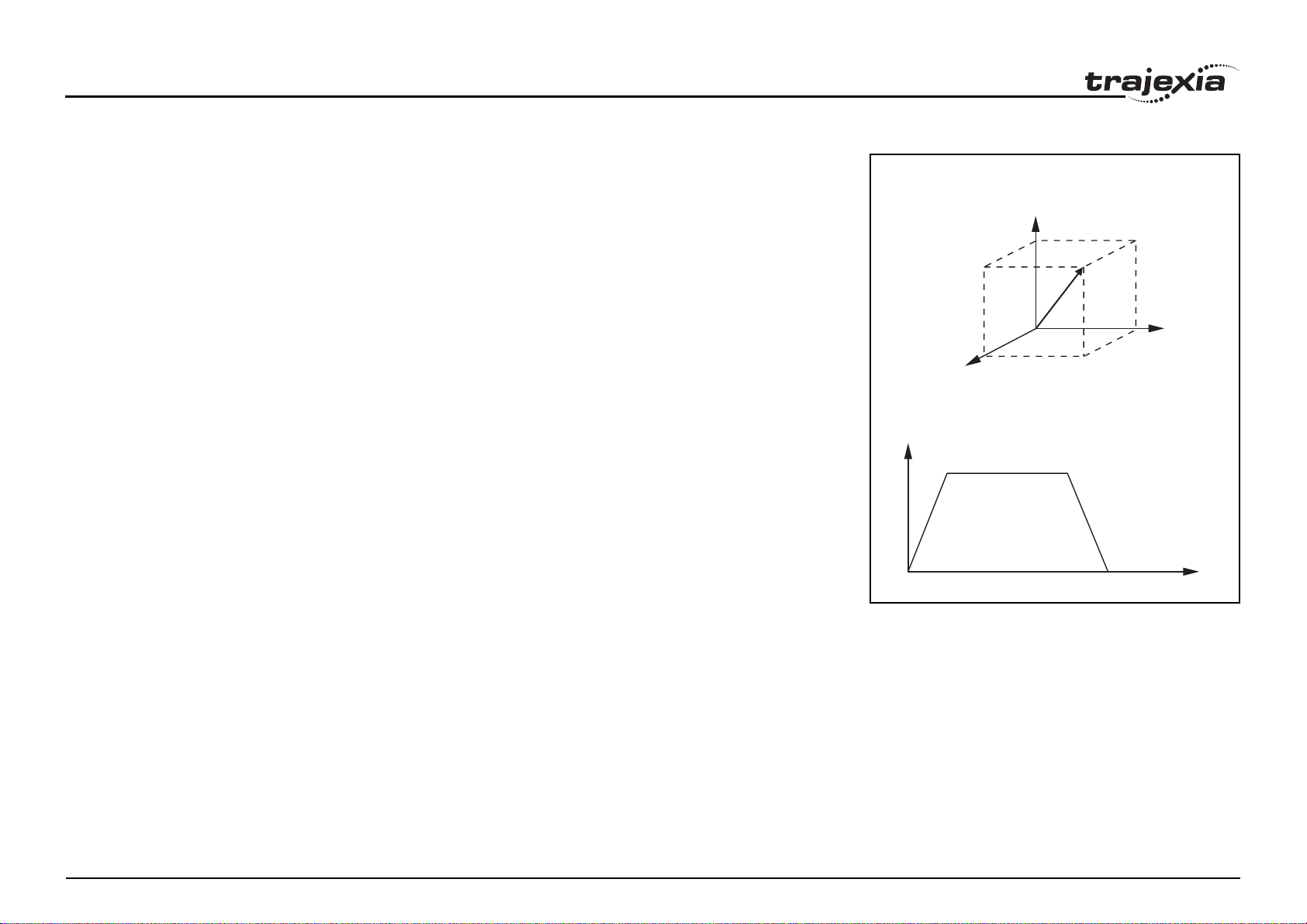
Interpolazione circolare
Potrebbe essere necessario che un utensile si sposti dal punto
iniziale al punto finale in un arco di cerchio. In questo caso,
il movimento di due assi è un movimento interpolato circolare
effettuato utilizzando il comando MOVECIRC.
Il diagramma nella figura corrisponde al comando
MOVECIRC(-100,0,-50,0,0). Vengono specificati il punto centrale,
il punto finale desiderato della traiettoria rispetto al punto iniziale
e la direzione del movimento. Il comando MOVECIRC calcola
il raggio e l'angolo di rotazione. Come per il comando MOVE
dell'interpolazione lineare, le variabili ACCEL, DECEL e SPEED
associate all'asse di base determinano il profilo di velocità lungo
il movimento circolare.
Controllo CAM
Oltre ai profili di movimento standard, TJ1-MC__ supporta anche
la definizione di un profilo di posizione per l'asse da muovere.
Il comando CAM muove un asse in base ai valori di posizione
memorizzati nella matrice Table di TJ1-MC__. La velocità
di movimento lungo il profilo è determinata dai parametri
dell'asse. La figura corrisponde al comando CAM(0,99,100,20).
L'asse A rappresenta il tempo, mentre l'asse B è la posizione.
Fig. 8
Fig. 9
-50
50
050
B
2.2.3 Controllo EG
Il controllo di riduzione elettronica (EG) consente di creare
un anello di trasmissione diretto o un movimento collegato
tra due assi. L'unità MC supporta le seguenti operazioni:
Revisione 3.0
• Trasmissione elettronica
• CAM sincronizzato
MANUALE DI RIFERIMENTO HARDWARE 22
A
Page 23
Filosofia del sistema
• Movimento collegato
• Aggiunta di assi
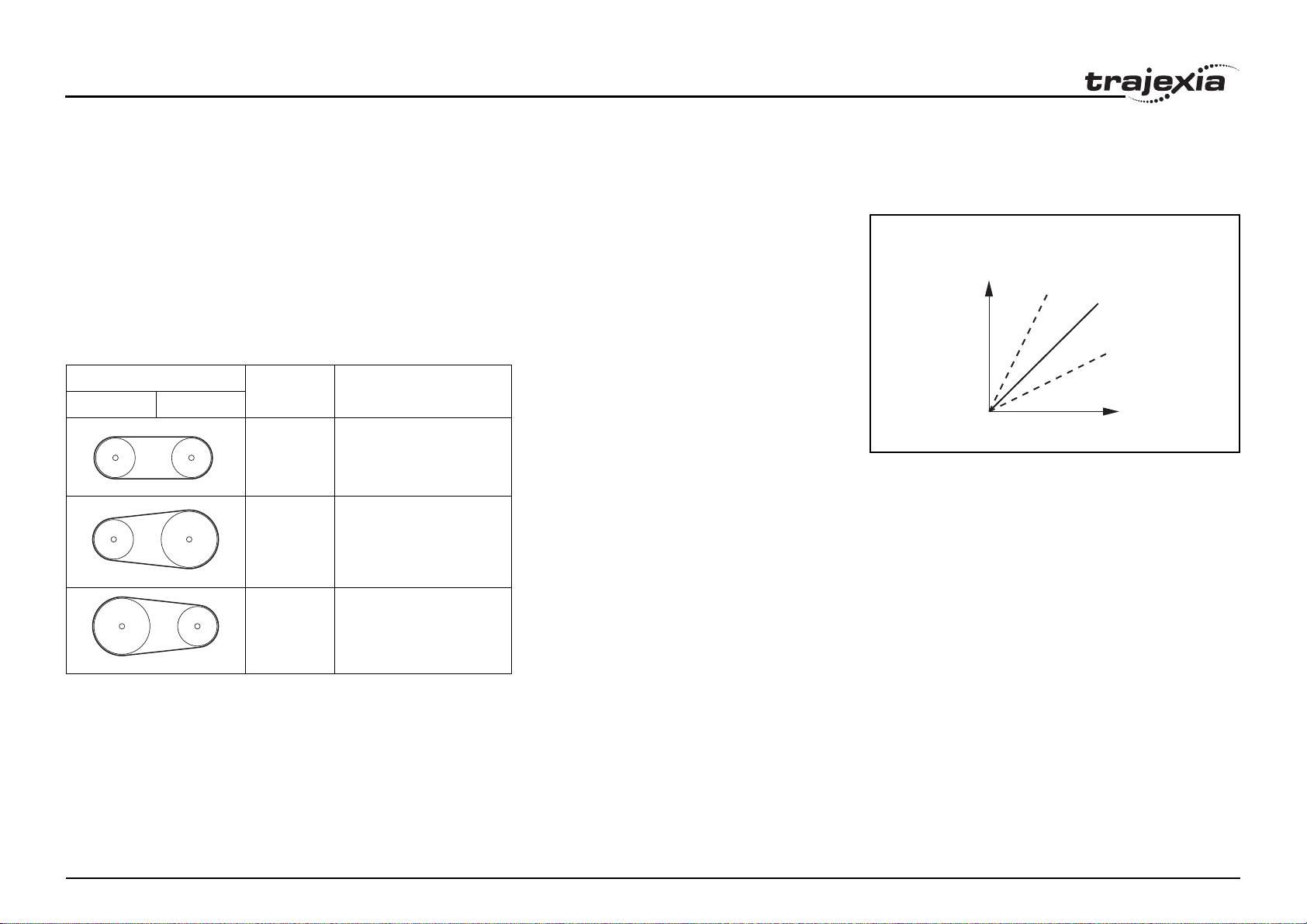
Trasmissione elettronica
TJ1-MC__ è in grado offrire un anello di trasmissione
da un asse a un altro a condizione che vi sia un dispositivo
di trasmissione fisico che colleghi entrambi gli assi. A tal fine,
è possibile utilizzare nel programma il comando CONNECT,
specificando il rapporto e l'asse da collegare.
Nella figura, A indica l'asse principale, mentre B indica l'asse
oggetto del comando CONNECT.
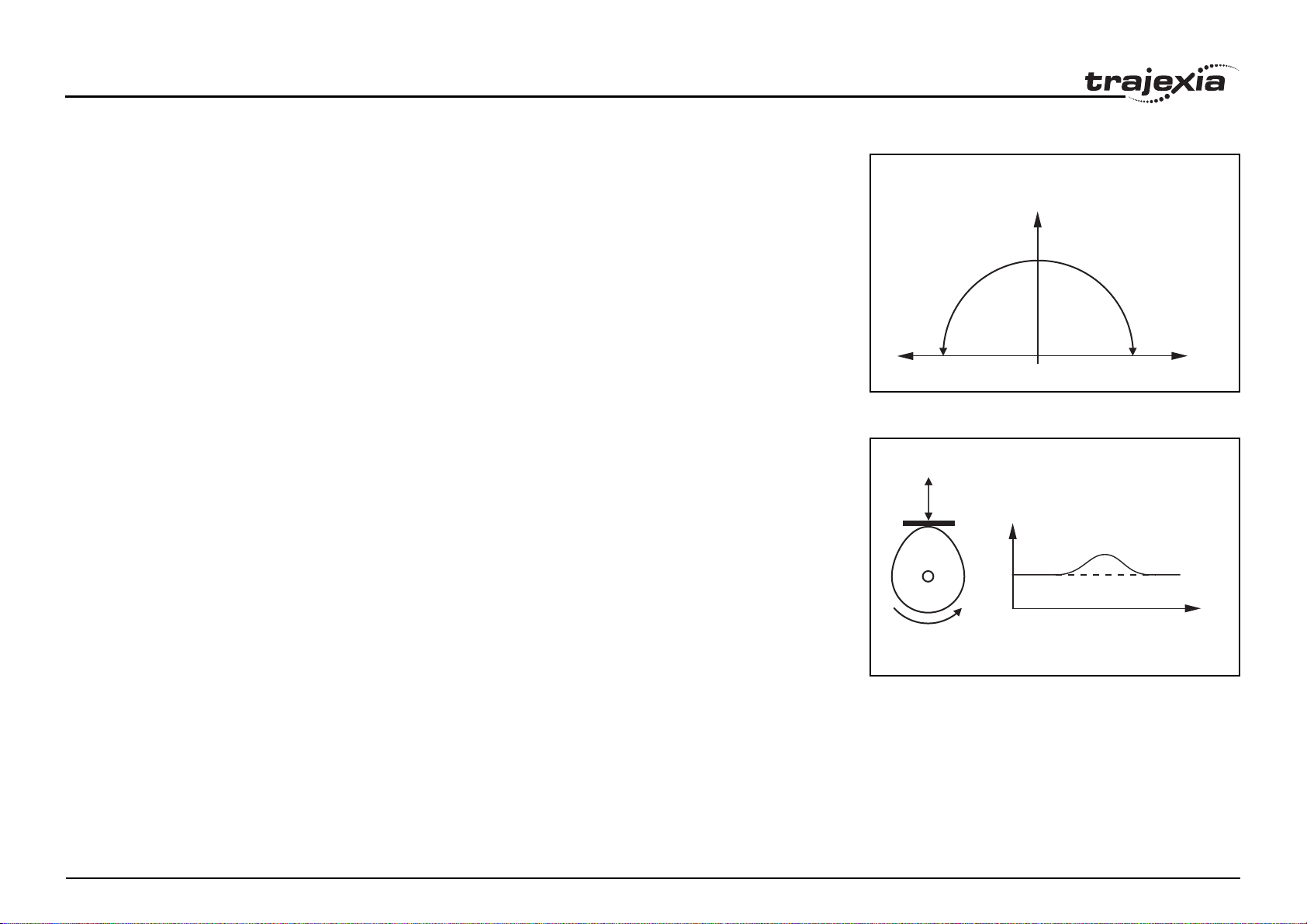
/i
Assi Rapporto Comando CONNECT
Fig. 10
B
2:1
1:1
1:2
Revisione 3.0
01
1:1 CONNECT(1,0) AXIS(1)
2:1 CONNECT(2,0) AXIS(1)
1:2 CONNECT(0.5,0) AXIS(1)
A
MANUALE DI RIFERIMENTO HARDWARE 23
Page 24

Filosofia del sistema
Controllo CAM sincronizzato
Oltre allo strumento per profili CAM standard, TJ1-MC__ supporta
anche uno strumento per collegare il profilo CAM a un altro asse.
Il comando per creare il collegamento si chiama CAMBOX.
La velocità di spostamento lungo il profilo non è determinata
dai parametri dell'asse ma dalla posizione dell'asse collegato.
Di fatto, è come collegare due assi lungo una camma.
Nella figura, A indica la posizione dell'asse principale (0), mentre
B indica la posizione dell'asse oggetto del comando CAMBOX (1).
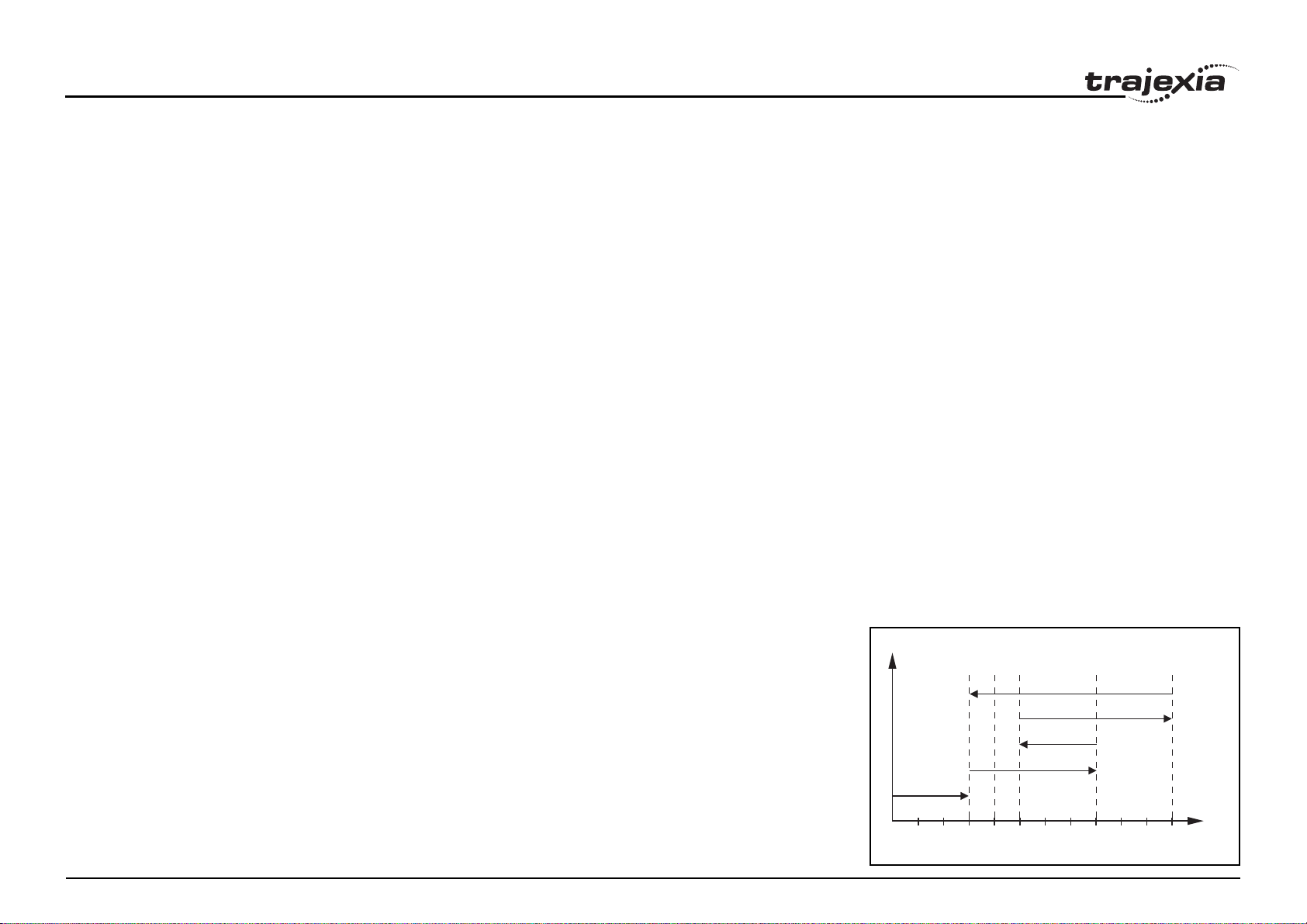
Movimento collegato
Il comando
specifico a un asse principale. Il movimento è diviso in accelerazione,
decelerazione e velocità costante e tali fasi vengono specificate nelle
distanze del collegamento principale. Ciò può essere particolarmente
utile per la sincronizzazione di due assi per un periodo di tempo
specificato.
Legenda della figura:
A. Asse del tempo
B. Asse della velocità
C. Asse principale (1)
D. Sincronizzato
E. Asse (0) di MOVELINK
MOVELINK
consente di collegare un movimento
Fig. 11
B
A
Fig. 12
B
DC
E
A
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 24
Page 25
Filosofia del sistema
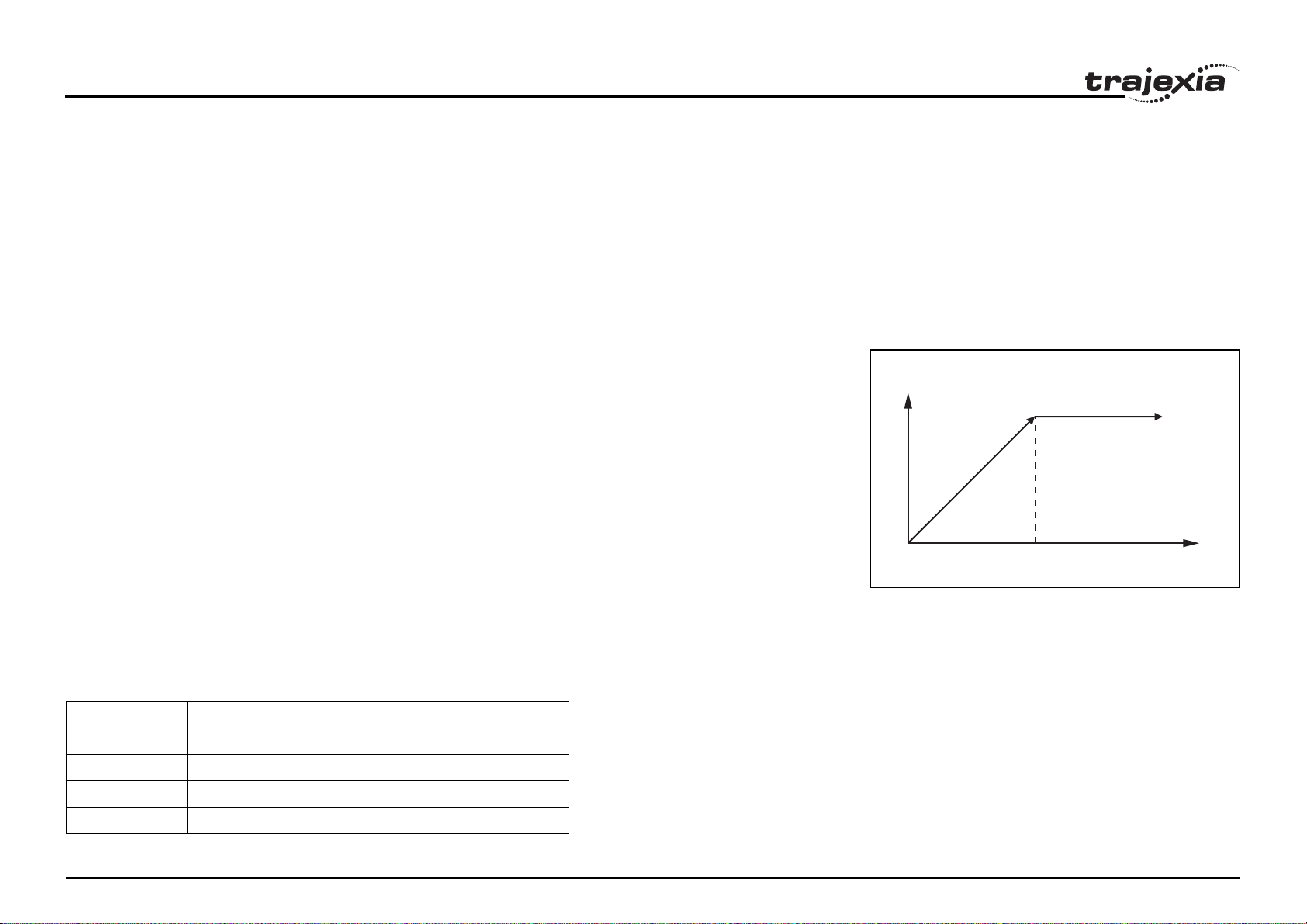
Aggiunta di assi
È molto utile poter aggiungere tutti i movimenti di un asse a un altro
asse. Un'applicazione possibile è, ad esempio, la modifica dell'offset
tra due assi collegati mediante trasmissione elettronica. TJ1-MC__
consente tale opportunità grazie al comando
dell'asse collegato saranno costituiti da tutti i movimenti dell'asse
effettivo più ulteriori movimenti dell'asse principale.
Nella figura, A indica l'asse del tempo, mentre B indica l'asse della
velocità.
ADDAX
. I movimenti
Fig. 13
B
B
BASE(0)
ADDAX(2)
FORWARD
MOVE(100) AXIS(2)
MOVE(-60) AXIS(2)
A
A
B
A
2.2.4 Altre operazioni
Annullamento di movimenti
Revisione 3.0
Durante il normale funzionamento o in caso di emergenza può essere
necessario cancellare dai buffer il movimento corrente. In presenza
del comando
corrente rispettivamente dell'asse selezionato o di tutti gli assi.
MANUALE DI RIFERIMENTO HARDWARE 25
CANCEL
o
RAPIDSTOP
, verrà annullato il movimento
Page 26
Filosofia del sistema
Ricerca dell'origine
La retroazione dell'encoder per il controllo della posizione del
motore è incrementale. Ciò significa che tutti i movimenti devono
essere definiti rispetto a un punto di origine. Utilizzare il comando
DATUM per impostare una procedura in base alla quale TJ1-MC__
passa attraverso una sequenza e cerca l'origine in base agli
ingressi digitali e/o marker Z provenienti dal segnale dell'encoder.
Registrazione dell'evento
TJ1-MC__ è in grado di annotare in un registro la posizione
di un asse quando si verifica un evento, chiamato ingresso
di registrazione evento. Sul fronte di salita o discesa di un segnale
di ingresso, che può essere il marker Z o un ingresso, TJ1-MC__
registra nell'hardware la posizione di un asse. Tale posizione
può quindi essere utilizzata per correggere possibili errori
tra la posizione attuale e quella desiderata. Per impostare
la registrazione dell'evento, utilizzare il comando
Poiché la posizione viene registrata nell'hardware, non si verifica
il software overhead né sono necessarie le routine di manutenzione
per interrupt, eliminando la necessità di dover far fronte ai problemi
associati alla tempistica.
REGIST
.
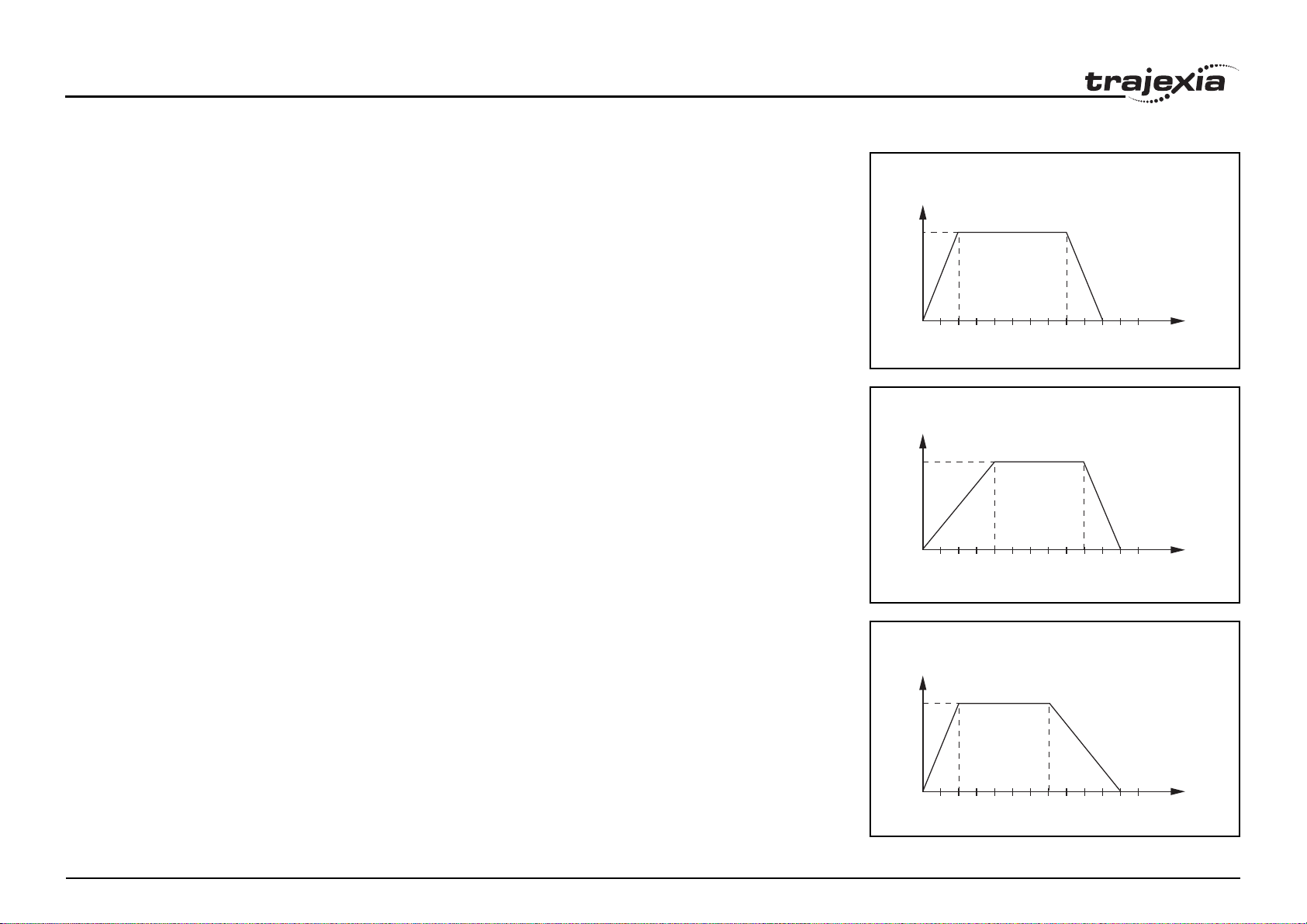
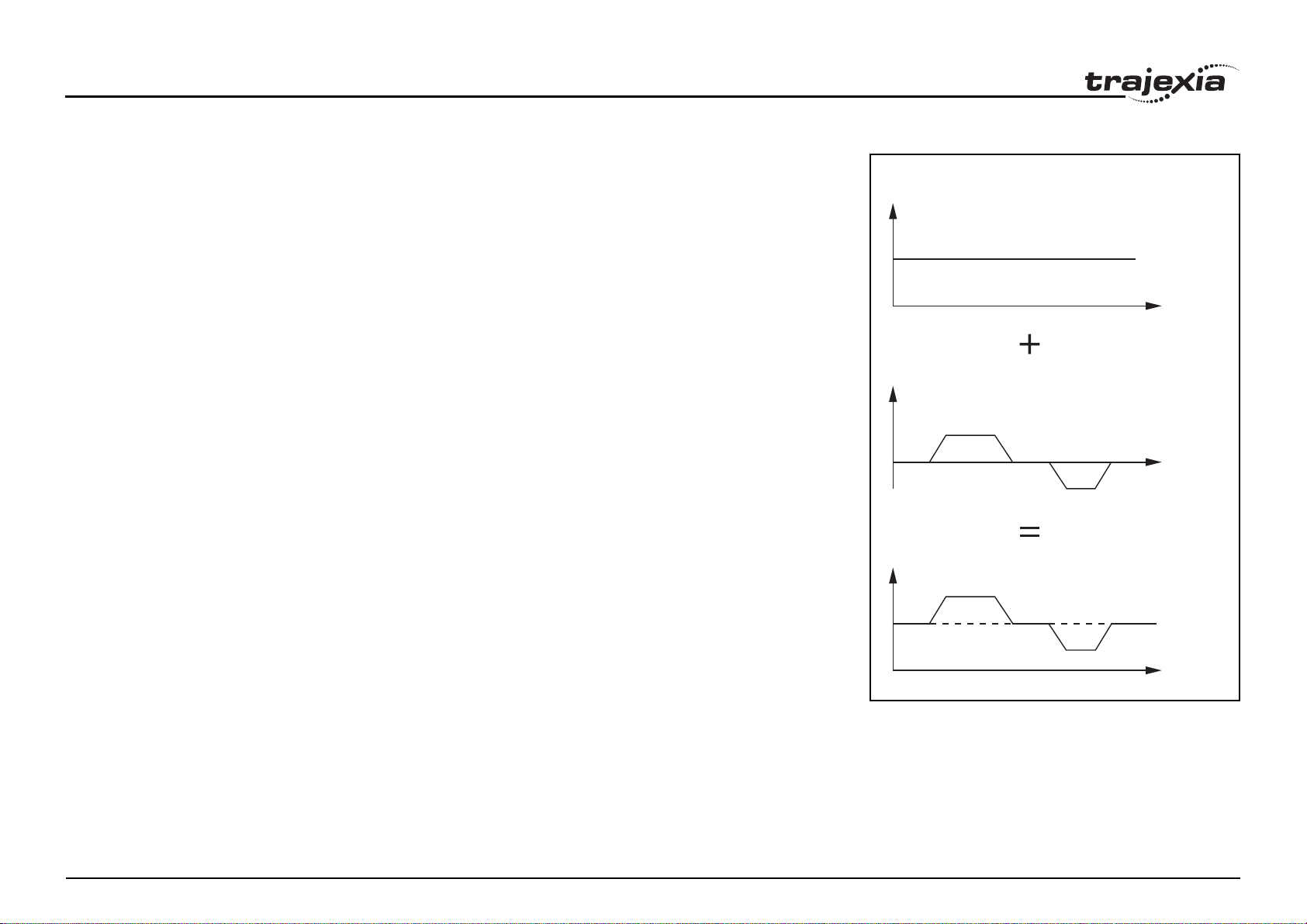
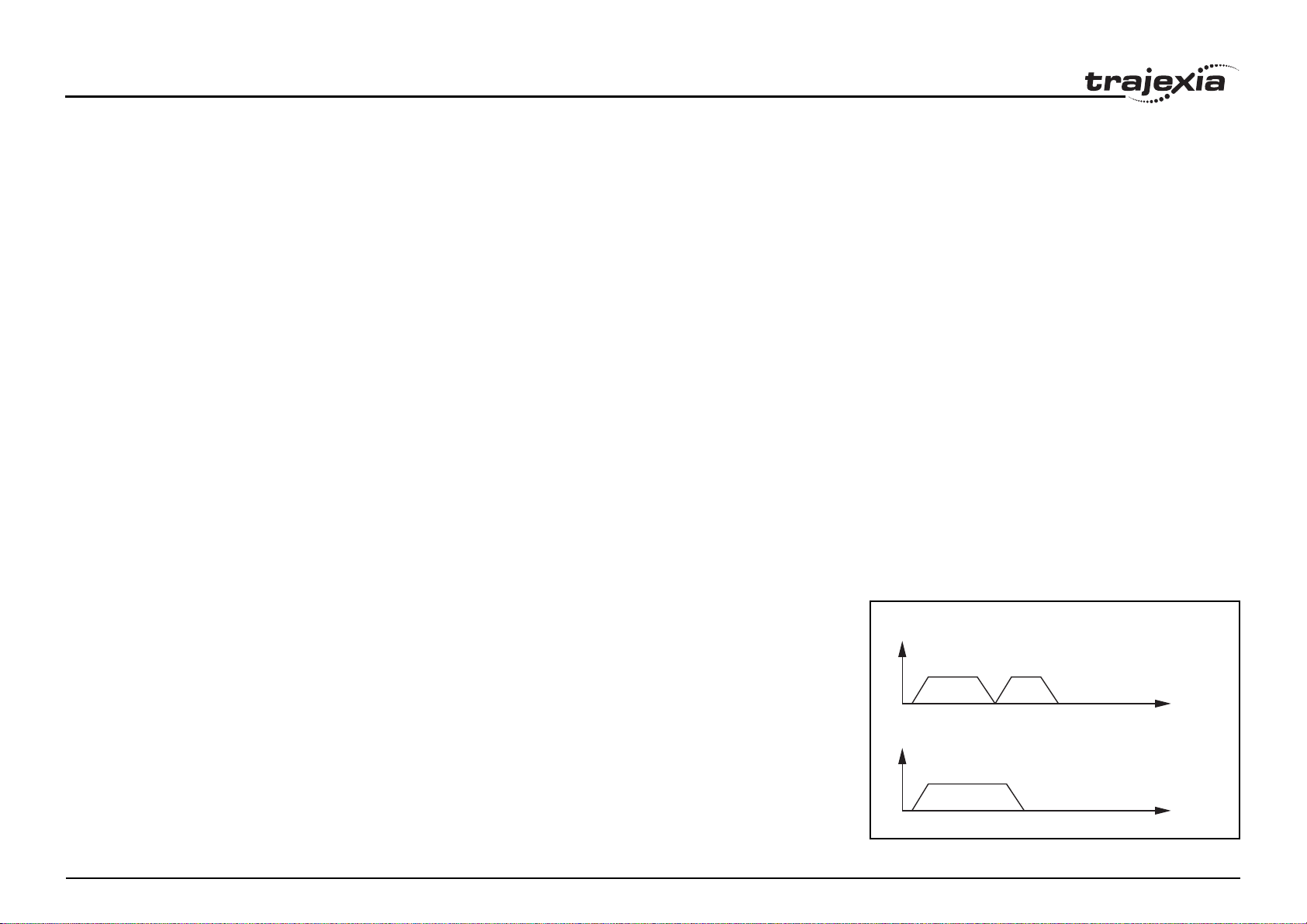
Unione di movimenti
Se il parametro degli assi MERGE è impostato su 1, un movimento
è sempre seguito da un movimento successivo senza interruzione.
Le figure mostrano le transizioni di due movimenti con MERGE
impostato su 0 e su 1.
Nella figura, A indica l'asse del tempo, mentre B indica l'asse della
velocità.
Jog
Il jog consente di muovere gli assi in avanti o indietro a una velocità
costante mediante il funzionamento manuale degli ingressi digitali.
Revisione 3.0
Mediante l'ingresso è inoltre possibile selezionare velocità diverse.
Vedere i parametri degli assi FWD_JOG, REV_JOG e FAST_JOG.
MANUALE DI RIFERIMENTO HARDWARE 26
Fig. 14
B
MERGE = 0
B
MERGE = 1
A
A
Page 27
Filosofia del sistema
2.3 Principi del servosistema
In questa sezione vengono descritti brevemente il funzionamento
interno di TJ1-MC__ e il relativo servosistema utilizzato.
2.3.1 Sistema ad anello semichiuso
Il servosistema di TJ1-MC__ utilizza un sistema ad anello
semichiuso o chiuso in grado di rilevare i movimenti effettivi della
macchina in base alla rotazione del motore rispetto a un valore
di destinazione e di calcolare l'errore tra il valore di destinazione
e il movimento effettivo, riducendo l'errore mediante retroazione.
2.3.2 Funzionamento interno di TJ1-MC__
I sistemi ad anello chiuso sono quelli maggiormente utilizzati
nei servosistemi moderni applicati a dispositivi di posizionamento
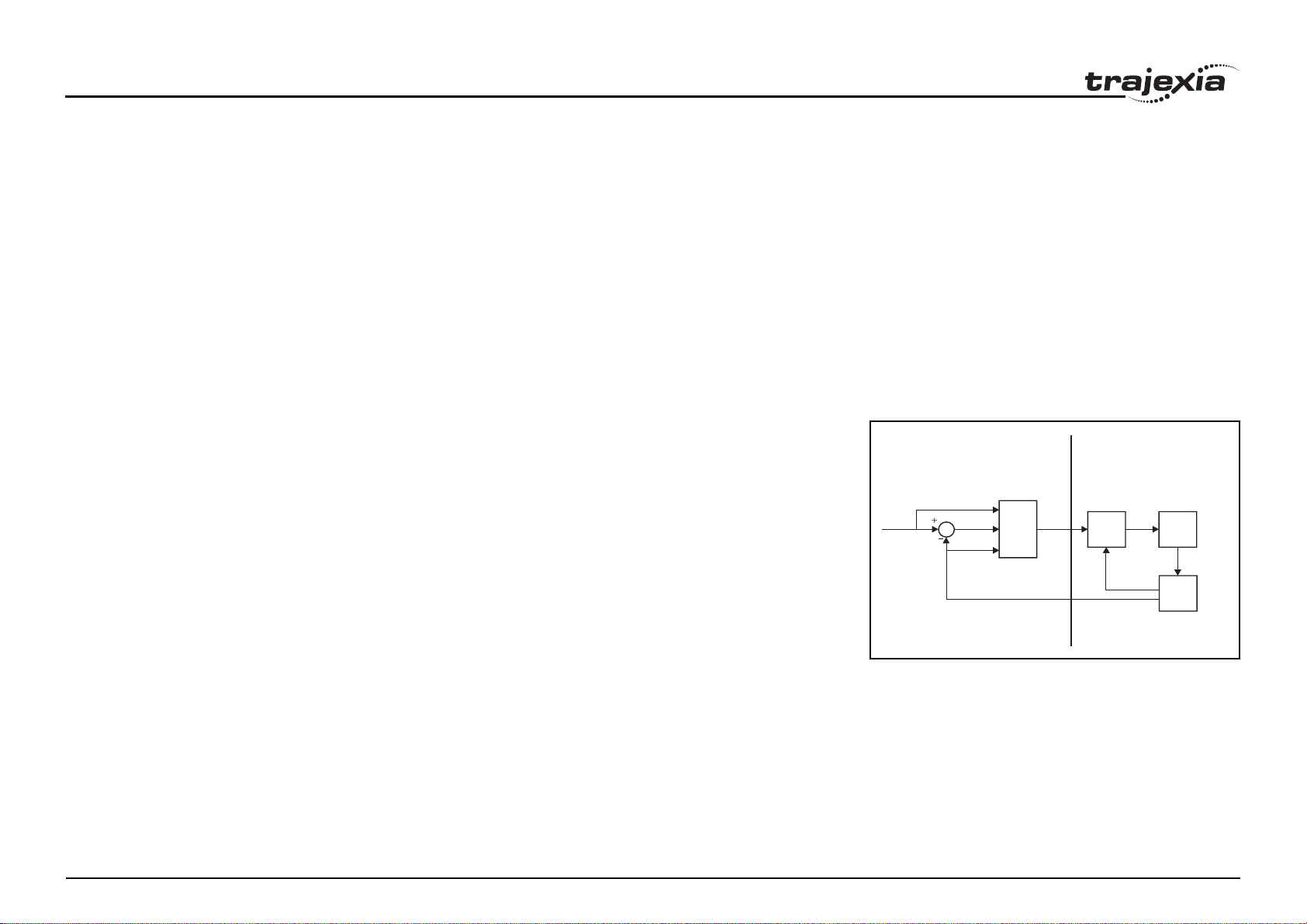
per applicazioni industriali. La figura mostra il principio di base
del servosistema utilizzato nell'unità TJ1-MC__.
1. TJ1-MC__ esegue il controllo della posizione effettiva.
L'ingresso principale dell'unità è quello del Following Error,
ovvero la differenza calcolata tra la posizione richiesta
e quella effettivamente misurata.
2. Il modulo di posizionamento calcola l'uscita della velocità
di riferimento richiesta determinata dal Following Error
e possibilmente la posizione richiesta e quella misurata.
La velocità di riferimento viene fornita dal servoazionamento.
3. Il servoazionamento controlla la velocità di rotazione del
servomotore che corrisponde alla velocità di riferimento. La
velocità di rotazione è proporzionale alla velocità di riferimento.
4. L'encoder rotativo genera gli impulsi di retroazione per la velocità
all'interno dell'anello di velocità del servoazionamento e per
la posizione all'interno dell'anello di posizione di TJ1-MC__.
Revisione 3.0
Legenda della figura:
A. TJ1-MC__
B. Servosistema
Fig. 15
C
AB
2
1
D
E
3
F
G
4
I
H
J
MANUALE DI RIFERIMENTO HARDWARE 27
Page 28
Filosofia del sistema
C. Posizione richiesta
D. Controllo della posizione
E. Velocità di riferimento
F. Controllo della velocità
G. M oto re
H. Encoder
I. Velocità misurata
J. Posizione misurata
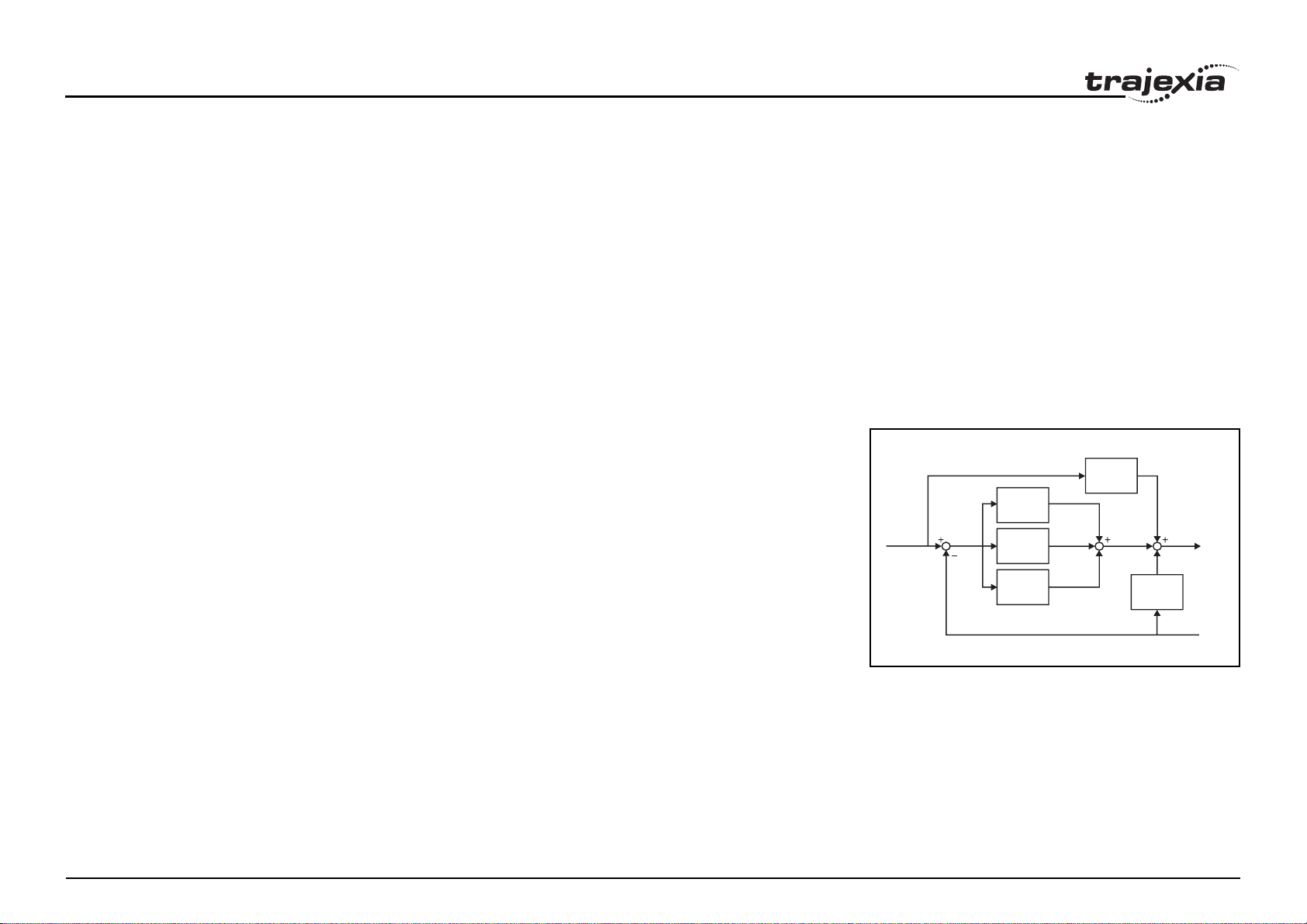
2.3.3 Algoritmo di controllo assi
Il servosistema controlla il motore mediante la regolazione
continua della velocità di riferimento del servoazionamento.
La velocità di riferimento viene calcolata in base all'algoritmo
di controllo assi di TJ1-MC__, descritto in questa sezione.
Questo algoritmo utilizza la posizione richiesta (A), la posizione
misurata (D) e il Following Error (B) per determinare la velocità
di riferimento. Il Following Error è la differenza tra la posizione
richiesta e quella misurata. La posizione richiesta, la posizione
misurata e il Following Error sono rappresentati dai parametri
degli assi MPOS, DPOS e FE. Affinché l'utente sia in grado di
configurare il funzionamento corretto del controllo per ciascuna
applicazione, sono stati implementati cinque valori di guadagno.
C è il segnale di uscita.
• Guadagno proporzionale
Il guadagno proporzionale K
che è proporzionale al Following Error E.
O
= Kp · E
p
Tutti i sistemi funzionali utilizzano il guadagno
proporzionale e per molti di essi è sufficiente utilizzare
solo questo parametro del guadagno. Il parametro degli
assi del guadagno proporzionale si chiama P_GAIN.
• Guadagno integrale
Revisione 3.0
Il guadagno integrale K
alla somma dei Following Error che si sono verificati durante
il funzionamento del sistema.
O
= Ki · ΣE
i
crea un'uscita Op
p
crea un'uscita Oi che è proporzionale
i
Fig. 16
∑
K
vff
K
p
AB C
∑
K
i
∆
K
d
∆
K
ov
D
MANUALE DI RIFERIMENTO HARDWARE 28
Page 29
Filosofia del sistema
Poiché il guadagno integrale può provocare la sovraelongazione,
viene solitamente utilizzato solo nei sistemi in funzione a velocità
costante o con accelerazioni lente. Il parametro degli assi del
guadagno integrale si chiama
I_GAIN
.
• Guadagno derivativo
Il guadagno derivativo K
produce un'uscita Od che
d
è proporzionale alla modifica contenuta nel Following Error E
e sollecita la risposta alle modifiche in errore pur mantenendo
la stessa stabilità relativa.
= Kd · ∆E
O
d
Il guadagno derivativo potrebbe produrre una risposta più
omogenea e i valori alti potrebbero provocare l'oscillazione.
Il parametro degli assi del guadagno derivativo si chiama
D_GAIN.
• Guadagno della velocità di uscita
Il guadagno della velocità di uscita K
produce un'uscita Oov
ov
che è proporzionale alla variazione nella posizione misurata P
e aumenta lo smorzamento del sistema.
= Kov · ∆P
O
ov
m
Il guadagno della velocità di uscita può essere utile per
i movimenti di livellamento ma genera Following Error elevati.
Il parametro degli assi del guadagno della velocità di uscita
si chiama OV_GAIN.
• Guadagno feed-forward della velocità
Il guadagno feed-forward della velocità K
che è proporzionale alla modifica nella posizione richiesta
O
vff
e riduce al minimo il Following Error alle alte velocità.
P
d
= K
O
vff
vff
· ∆P
d
produce un'uscita
vff
È possibile impostare il parametro per ridurre al minimo
il Following Error in presenza di una velocità costante
della macchina dopo l'impostazione di altri guadagni.
Il parametro degli assi del guadagno feed-forward della
velocità si chiama VFF_GAIN.
Le impostazioni predefinite sono fornite nella tabella
insieme ai profili risultati. Per le impostazioni del guadagno
sono consentiti valori frazionari.
Revisione 3.0
/i
m
MANUALE DI RIFERIMENTO HARDWARE 29
Page 30
Filosofia del sistema
Guadagno Valore predefinito
Guadagno proporzionale 0,1
Guadagno integrale 0,0
Guadagno derivativo 0,0
Guadagno della velocità di uscita 0,0
Guadagno feed-forward della velocità 0,0
2.4 Architettura del sistema Trajexia
L'architettura del sistema dell'unità Trajexia si basa su questi principi:
• Controllo del programma
• Sequenza del movimento
• Buffer di movimento
• Comunicazione
• Dispositivi periferici
Tali principi dipendono a loro volta dal valore impostato nel parametro
SERVO_PERIOD. Nelle sezioni successive viene descritta la relazione tra
il valore di SERVO_PERIOD e i diversi principi dell'architettura del sistema.
2.4.1 Controllo del programma
I programmi consentono il funzionamento del sistema in una
determinata modalità, sono scritti in un linguaggio simile al BASIC
e controllano l'applicazione di assi e moduli. È possibile eseguire in
parallelo 14 programmi che possono essere eseguiti all'avvio del sistema,
avviati e interrotti da altri programmi ed eseguiti da Trajexia Tools.
I programmi eseguono comandi di movimento degli assi, controllano gli ingressi
e le uscite ed effettuano la comunicazione mediante i comandi BASIC.
• Esecuzione dell'anello di posizione
• Invio del riferimento dell'asse
• Gestione degli errori
2.4.3 Buffer di movimento
I buffer di movimento rappresentano il collegamento tra i comandi
BASIC e l'anello di controllo assi. Il comando BASIC di movimento
eseguito viene memorizzato in uno dei buffer. Durante la sequenza
di movimento successiva, il generatore di profili esegue il movimento
in base alle informazioni presenti nel buffer.
Al termine del movimento, il relativo comando viene rimosso dal buffer.
2.4.4 Comunicazione
Tutte le comunicazioni vengono eseguite nel quarto task CPU.
Per configurare le comunicazioni è possibile utilizzare un insieme
di comandi BASIC a ciò preposti. Quando l'unità Trajexia è uno slave
di comunicazione (come nella comunicazione PROFIBUS), è necessario
configurare la comunicazione solo in un task iniziale. Lo scambio dei valori
dalle variabili globali configurate avviene in modo trasparente. Quando
l'unità Trajexia è un master di comunicazione, i comandi BASIC
di comunicazione vengono utilizzati per la scrittura e la lettura.
2.4.5 Dispositivi periferici
Tutti gli ingressi e tutte le uscite vengono utilizzati nel relativo insieme
di parametri (IN, OP, AIN, AOUT). Gli ingressi e le uscite vengono rilevati
e mappati in modo automatico in Trajexia. Gli inverter sono considerati
un dispositivo periferico e per il loro controllo è disponibile un insieme
di comandi BASIC. Al modulo TJ1-ML__ è possibile collegare diversi
moduli di ingresso e di uscita MECHATROLINK-II.
2.4.2 Sequenza del movimento
La sequenza del movimento controlla la posizione di tutti e 16 gli assi
Revisione 3.0
mediante le seguenti azioni:
• Lettura del buffer di movimento
• Lettura della posizione misurata (MPOS, Measured Position) corrente
• Calcolo della posizione richiesta (DPOS, Demanded Position) successiva
MANUALE DI RIFERIMENTO HARDWARE 30
Page 31

Filosofia del sistema
2.5 Tempo di ciclo
Tutti i processi che si verificano nel sistema Trajexia sono basati sul
tempo di ciclo, diviso in quattro task CPU:
• Intervalli di tempo di 250 µs per un
µ
• Intervalli di tempo di 500
s per un
SERVO_PERIOD
SERVO_PERIOD
di 0,5 e 1 ms
di 2 ms
Il numero di processi che è possibile eseguire in ciascun intervallo
di tempo dipende dall'impostazione di SERVO_PERIOD.
Le operazioni eseguite in ciascun task CPU sono le seguenti.
Task CPU Operazione
Primo task CPU Sequenza del movimento
Processo a bassa priorità
Secondo task CPU Processo ad alta priorità
Terz o t a sk CP U
Quarto task CPU Comunicazioni esterne
1
Nota
1
Sequenza del movimento
(solo se SERVO_PERIOD = 0,5 ms)
Aggiornamento LED
Processo ad alta priorità
L'esecuzione della sequenza del movimento dipende
dall'impostazione del parametro SERVO_PERIOD.
Fig. 17
250 µs
123 4
Tempo di ciclo = 1 ms
Fig. 18
500 µs
123 4
Tempo di ciclo = 2 ms
2.5.1 Tempo di servoazionamento
È possibile impostare
I processi che vengono eseguiti all'interno del tempo di ciclo
dipendono dall'impostazione del parametro
SERVO_PERIOD
impostare in base alla configurazione di sistema.
Revisione 3.0
L'impostazione di fabbrica è 1 ms (SERVO_PERIOD = 1.000).
L'eventuale modifica ha effetto solo dopo il riavvio di TJ1-MC__.
MANUALE DI RIFERIMENTO HARDWARE 31
SERVO_PERIOD
su 0,5, 1 o 2 ms.
SERVO_PERIOD
è un parametro di Trajexia che è necessario
.
Page 32

Filosofia del sistema
Nota
Solo il servoazionamento Sigma-III supporta il ciclo
di trasmissione a 0,5 ms.
Esempio 1
Il valore del parametro SERVO_PERIOD è 0,5 ms e la sequenza
del movimento viene eseguita ogni 0,5 ms.
Fig. 19
Task CPU 1
Task CPU 2
Sequenza del movimento
Task a bassa priorità (0, 1, 2, 3 ...)
Task ad alta priorità (13, 14)
Esempio 2
Il valore del parametro SERVO_PERIOD è 1 ms e la sequenza
del movimento viene eseguita ogni 1 ms. Poiché la sequenza
del movimento non viene eseguita durante il terzo task CPU,
per l'esecuzione del programma è disponibile più tempo.
L'esecuzione dei programmi ad alta priorità è più rapida.
Revisione 3.0
Task CPU 3
Task CPU 4
Fig. 20
Task CPU 1
Task CPU 2
Task CPU 3
Task CPU 4
Sequenza del movimento
Aggiornamento LED
Task ad alta priorità (13, 14)
Comunicazione
Sequenza del movimento
Task a bassa priorità (0, 1, 2, 3 ...)
Task ad alta priorità (13, 14)
Aggiornamento LED
Task ad alta priorità (13, 14)
Comunicazione
1 ms
1 ms
MANUALE DI RIFERIMENTO HARDWARE 32
Page 33

Filosofia del sistema
Esempio 3
Il valore del parametro SERVO_PERIOD è 2 ms e la sequenza
del movimento viene eseguita ogni 2 ms.
Regole del tempo di servoazionamento
Il numero degli assi e dei dispositivi MECHATROLINK-II presenti
nel sistema Trajexia determina il valore del parametro di sistema
SERVO_PERIOD.
Le unità TJ1-MC__ supportano 3 tipi di dispositivi
MECHATROLINK-II:
• Servoazionamenti
TJ1-MC__ considera i servoazionamenti come assi.
• Inverter
TJ1-MC__ non considera gli inverter come assi.
• Moduli di I/O e accoppiatori bus
TJ1-MC__ non considera i moduli di I/O
(analogici e digitali, contatori e a impulsi)
e gli accoppiatori bus come assi.
Per l'impostazione del parametro SERVO_PERIOD è necessario
rispettare le regole più limitative. L'impostazione di un valore
non appropriato per il parametro SERVO_PERIOD provoca
il rilevamento errato dei dispositivi MECHATROLINK-II.
Nella tabella riportata di seguito sono elencate le regole
più limitative. Per ciascuna unità viene indicato il numero
massimo di dispositivi che l'unità è in grado di controllare
per l'impostazione di SERVO_PERIOD fornita.
/i
Fig. 21
Task CPU 1
Task CPU 2
Task CPU 3
Task CPU 4
Sequenza del movimento
Task a bassa priorità (0, 1, 2, 3 ...)
Task ad alta priorità (13, 14)
Aggiornamento LED
Task ad alta priorità (13, 14)
Comunicazione
2 ms
SERVO_PERIOD TJ1-MC16 TJ1-MC04 TJ1-ML16 TJ1-ML04
0,5 ms 8 assi 5 assi 4 dispositivi 4 dispositivi
4 dispositivi
non assi
Revisione 3.0
1 ms 16 assi 5 assi 8 dispositivi 4 dispositivi
8 dispositivi
non assi
4 dispositivi
non assi
8 dispositivi
non assi
MANUALE DI RIFERIMENTO HARDWARE 33
Page 34

Filosofia del sistema
SERVO_PERIOD TJ1-MC16 TJ1-MC04 TJ1-ML16 TJ1-ML04
2 ms 16 assi 5 assi 16 dispositivi 4 dispositivi
8 dispositivi
non assi
8 dispositivi
non assi
Esempi di configurazione
Esempio 1
• 1 x TJ1-MC__
• 1 x TJ1-ML__
• 3 x servoazionamento Sigma-II
• SERVO_PERIOD = 1 ms
TJ1-MC__ supporta SERVO_PERIOD a 0,5 ms con 3 assi.
TJ1-MC__ supporta SERVO_PERIOD a 0,5 ms con 3 dispositivi.
Sigma-II supporta SERVO_PERIOD a 1 ms. Questo è il fattore
di limitazione.
Fig. 22
Servoazionamento
Tutti gli indirizzi Mechatrolink
sono numerati 4x (fino a 16 per unità)
Revisione 3.0
Indirizzo
Mechatrolink
43
Asse 2
Indirizzo
Mechatrolink
44
Asse 3
Indirizzo
Mechatrolink
45
Terminatore
Asse 4
MANUALE DI RIFERIMENTO HARDWARE 34
Page 35

Filosofia del sistema
Esempio 2
• 1 x TJ1-MC16
• 2 x TJ1-ML16
• 16 x servoazionamento Sigma-II
• SERVO_PERIOD = 1 ms
TJ1-MC16 supporta SERVO_PERIOD a 1 ms con 16 assi.
TJ1-ML16 supporta SERVO_PERIOD a 1 ms con 8 dispositivi.
Sigma-II supporta SERVO_PERIOD a 1 ms.
Fig. 23
Servoazionamento
Indirizzo41Indirizzo42Indirizzo43Indirizzo44Indirizzo45Indirizzo46Indirizzo47Indirizzo
48
Terminatore
Asse 0
Indirizzo
49
Asse 8
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 35
Asse 1
Indirizzo4AIndirizzo4BIndirizzo4CIndirizzo4DIndirizzo4EIndirizzo4FIndirizzo
Asse 9
Asse 2
Asse 10
Asse 3
Asse 11
Asse 4
Asse 12
Asse 5
Asse 13
Asse 6
Asse 14
Asse 7
50
Asse 15
Terminatore
Page 36

Filosofia del sistema
Esempio 3
• 1 x TJ1-MC16
• 1 x TJ1-ML16
• 8 x servoazionamento Sigma-II
• 1 x inverter F7Z con interfaccia SI-T
• 3 x modulo di I/O MECHATROLINK-II
• SERVO_PERIOD = 2 ms
TJ1-ML16 supporta SERVO_PERIOD a 2 ms con 12 dispositivi.
Questo è il fattore di limitazione.
Sigma-II supporta SERVO_PERIOD a 1 ms.
SI-T supporta 1 ms.
I moduli di I/O MECHATROLINK-II supportano 1 ms.
Indirizzo
21
Indirizzo
0 31 32 95 96 159 160
Allocazioni della memoria di I/O
61
Indirizzo
62
Fig. 24
Indirizzo
63
Indirizzo41Indirizzo42Indirizzo43Indirizzo44Indirizzo45Indirizzo46Indirizzo47Indirizzo
48
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 36
Page 37

Filosofia del sistema
Esempio 4
• 1 x TJ1-MC16
• 1 x TJ1-ML16
• 2 x TJ1-FL02
• 1 x TJ1-PRT (non influisce sul parametro SERVO_PERIOD)
• 5 x servoazionamento Sigma-II
• SERVO_PERIOD = 1 ms
TJ1-MC16 supporta SERVO_PERIOD a 1 ms con 9 assi
(5 servoassi MECHATROLINK-II e 4 assi TJ1-FL02).
TJ1-ML16 supporta SERVO_PERIOD a 1 ms con 5 dispositivi.
TJ1-FL02 supporta SERVO_PERIOD a 0,5 ms
(2 assi per ogni modulo).
Sigma-II supporta SERVO_PERIOD a 1 ms.
Fig. 25
Asse 8Asse 7 Asse 1Asse 0
Indirizzo 43Indirizzo 44Indirizzo 45Indirizzo 46Indirizzo
47
Asse 2 Asse 3 Asse 4 Asse 5
Asse 6
2.6 Controllo del programma e multitasking
Il sistema Trajexia è in grado di controllare programmi, processi
e attività in multitasking.
2.6.1 Controllo del programma
Il sistema Trajexia è in grado di controllare 14 processi scritti sotto
forma di programmi in BASIC. Il programma viene eseguito in base
alla relativa impostazione di esecuzione.
I processi da 1 a 12 sono quelli a bassa priorità, mentre i processi
13 e 14 hanno alta priorità.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 37
Page 38

Filosofia del sistema
2.6.2 Processi
Il processo 0 a bassa priorità è riservato alla finestra terminal
di Trajexia Tools, che viene utilizzata per scrivere i comandi BASIC
direttamente nell'unità TJ1-MC__ indipendentemente da altri programmi. Questi comandi vengono eseguiti dopo aver premuto Invio.
2.6.3 Multitasking
Ogni tempo di ciclo è diviso in 4 periodi denominati task CPU.
I processi vengono eseguiti nei primi 3 task CPU in base alla
relativa priorità.
La sequenza del movimento e i processi a bassa priorità (A)
vengono eseguiti nel periodo Low Task (LT).
I processi ad alta priorità (B) vengono eseguiti nei periodi
High Task (HT).
La comunicazione esterna non correlata alla rete di movimento
viene aggiornata nel quarto task CPU delle comunicazioni (COMS).
Trajexia è in grado di controllare contemporaneamente fino
a 14 programmi.
Rispetto ai processi a bassa priorità, un processo ad alta priorità
è sempre disponibile per l'esecuzione durante due dei quattro task
CPU. I task ad alta priorità vengono eseguiti più rapidamente di
quelli a bassa priorità perché per la loro esecuzione è disponibile
più tempo. Tutti i task a bassa priorità devono infatti condividere
un solo periodo di tempo mentre i task ad alta priorità dispongono
di due periodi di tempo a loro riservati.
Fig. 26
Fig. 27
LT HT n. 1 HT n. 2
Tempo di ciclo
A B
LT HT n. 1 HT n. 2
Tempo di ciclo
COMS
COMS
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 38
Page 39

Filosofia del sistema
2.6.4 Esempio di multitasking
Nel primo esempio sono presenti due processi ad alta priorità,
il 13 e il 14. I due periodi HT sono riservati per questi processi,
uno per il processo 13 e l'altro per il processo 14. I processi
a bassa priorità 3, 2, 1 e 0 vengono eseguiti nel periodo LT,
un processo per ogni tempo di ciclo, qui impostato su 1 ms.
Nell'esempio al centro è presente un solo processo ad alta priorità,
il 14. Entrambi i periodi HT sono riservati per questo processo.
I processi a bassa priorità 3, 2, 1 e 0 vengono eseguiti nel periodo
LT, un processo per ogni tempo di ciclo.
Nell'ultimo esempio non sono presenti processi ad alta priorità,
pertanto i periodi HT possono essere utilizzati per i processi
a bassa priorità, così come il periodo LT.
1
14
3
2
3
321
1 ms
1 ms
143
1 ms
13
COMS
COMS
COMS
2
0
(c/l)
Fig. 28
1 ms
13
14
1 ms
142
1 ms
32
1 ms
COMS COMS
1
COMS COMS
COMS COMS
10
14
(c/l)
1 ms
141
1 ms
13
0
(c/l)
(c/l)
3
COMS
210
14
1 ms
1 ms
140
1 ms
13
(c/l)
COMS
COMS
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 39
Page 40

Filosofia del sistema
2.7 Sequenza del movimento e assi
La sequenza del movimento è la parte dell'unità TJ1-MC__ che
controlla gli assi. La modalità effettiva di funzionamento della
sequenza del movimento dipende dal tipo di asse, che è possibile
impostare e leggere mediante il parametro
ATYPE
. All'avvio, il
sistema Trajexia rileva automaticamente la configurazione degli assi.
• Il valore predefinito del parametro ATYPE per gli assi
MECHATROLINK-II è 41 (velocità di MECHATROLINK).
• Il valore predefinito del parametro ATYPE per gli assi TJ1-FL02
è 44 (servoassi con un encoder incrementale).
Tutti gli assi non allocati vengono impostati come asse virtuale.
Il valore del parametro ATYPE è 0.
Ogni asse dispone di una struttura generale mostrata nella Fig. 29.
La sequenza del movimento che viene eseguita all'inizio di ogni
tempo di servoazionamento contiene i seguenti elementi:
1. Trasferimento di tutti i movimenti dai buffer di processo
in BASIC ai buffer di movimento (vedere la sezione 2.8).
2. Lettura degli ingressi digitali.
3. Carico dei movimenti (vedere nota).
4. Calcolo del profilo di velocità (vedere nota).
5. Calcolo delle posizioni degli assi (vedere nota).
6. Esecuzione del servoazionamento di posizione.
Per l'asse 0 ciò include anche le comunicazioni
del servoazionamento (vedere nota).
7. Aggiornamento delle uscite.
Fig. 29
• blocco
•
Generatore di profili
PARAMETRO ASSI
Anello di posizione
Anello di posizione
+
+
-
–
Following
Posizione
richiesta
Posizione
misurata
Following
Error
Error
Comando
Comando
di velocità
di velocità
Servoazionamento
OFF
ON
Anello
di velocità
Anello
di coppia
M
E
Nota
Prima di passare all'elemento successivo, per ogni asse
viene eseguito ciascuno di questi elementi.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 40
Page 41

Filosofia del sistema
2.7.1 Generatore di profili
Il generatore di profili è l'algoritmo che calcola la posizione
richiesta per ciascun asse. Il calcolo viene eseguito per ogni
sequenza di movimento.
Il profilo viene generato in base alle istruzioni di movimento
provenienti dai programmi in BASIC.
2.7.2 Anello di posizione
L'anello di posizione è l'algoritmo che conferma la presenza
di una deviazione minima tra la posizione misurata (MPOS)
e quella richiesta (DPOS) dello stesso asse.
2.7.3 Sequenza dell'asse
•Se SERVO = OFF per un asse, i comandi di movimento per
tale asse vengono ignorati.
• Se in un asse il valore del Following Error (FE) supera quello
del parametro FELIMIT, si verificano le seguenti azioni:
– WDOG viene impostato su OFF e tutti gli assi si arrestano.
– SERVO per l'asse che provoca l'errore viene impostato
su OFF.
– Il movimento corrente viene annullato e rimosso dal buffer.
Fig. 30
Programma in BASIC
.........
.........
MOVE(1000)
.........
.........
Generatore di profili
Posizione richiesta
2.7.4 Tipo di asse
/i
ATYPE Applicabile a
0 Tutti gli assi
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 41
Nome Descrizione
Asse virtuale Asse interno senza uscita fisica.
È l'unica impostazione valida per
gli assi non allocati, ovvero quelli
che non sono servoazionamento
MECHATROLINK-II o assi flessibili.
Page 42

Filosofia del sistema
ATYPE Applicabile a
40 Servoazionamento
MECHATROLINK-II
collegato
a TJ1-ML__
41
42
43 Driver esterno
collegato a un
modulo TJ1-FL02
44
45
Nome Descrizione
Posizione di
MECHATROLINK-II
Velocità di
MECHATROLINK-II
(predefinita)
Coppia di
MECHATROLINK-II
Uscita passo-passo Uscite a impulso e direzione. L'anello
Encoder servoasse
(predefinito)
Uscita encoder Come il passo-passo, ma con le
Anello di posizione nel
servoazionamento. TJ1-MC__
invia il riferimento della posizione
al servoazionamento mediante
MECHATROLINK-II.
Anello di posizione nel sistema
Trajexia. TJ1-MC__ invia la velocità
di riferimento al servoazionamento
mediante MECHATROLINK-II.
Anello di posizione nel sistema
Trajexia. TJ1-MC__ invia il riferimento
della coppia al servoazionamento
mediante MECHATROLINK-II.
di posizione è nel driver. TJ1-FL02 invia
impulsi e non riceve alcuna retroazione.
Servoazionamento analogico.
L'anello di posizione è nell'unità
TJ1-MC__. TJ1-FL02 invia la velocità
di riferimento e riceve la posizione
da un encoder incrementale.
uscite del differenziale di fase che
emulano un encoder incrementale.
46
47
48
Revisione 3.0
Tamagawa assoluto Come per il servoasse, con la differenza
che la retroazione viene ricevuta da
un encoder assoluto Tamagawa.
EnDat assoluto Come per il servoasse, con la differenza
che la retroazione viene ricevuta da
un encoder assoluto EnDat.
SSI assoluto Come per il servoasse, con la differenza
che la retroazione viene ricevuta da
un encoder assoluto SSI.
MANUALE DI RIFERIMENTO HARDWARE 42
Page 43

Filosofia del sistema
Asse virtuale ATYPE = 0
È possibile dividere un profilo complesso in due o più movimenti
semplici, ognuno assegnato a un asse virtuale. Tali movimenti
possono essere sommati mediante il comando BASIC ADDAX,
quindi assegnati a un asse reale.
Fig. 31
Generatore di profili
Posizione di MECHATROLINK-II ATYPE = 40
Con SERVO = ON, l'anello di posizione viene chiuso nel
servoazionamento. Le impostazioni del guadagno nell'unità
TJ1-MC__ non hanno effetto. Il riferimento della posizione
viene inviato al servoazionamento.
Nota
Sebbene
è quello nel servoazionamento. È possibile monitorare
il Following Error reale mediante il parametro
DRIVE_MONITOR
Nota
La posizione di MECHATROLINK-II ATYPE = 40
è l'impostazione consigliata per ottenere prestazioni
superiori del servomotore.
MPOS
e FE siano aggiornati, il valore reale
, impostando
DRIVE_CONTROL = 2
POSIZIONE
MISURATA
POSIZIONE
=
RICHIESTA
Fig. 32
TJ1-MC16 TJ1-ML16
Generatore
di profili
.
L'anello
di posizione
di Trajexia
è disattivato
(i guadagni non
vengono utilizzati).
OFF
SERVO
Posizione
richiesta
Posizione
misurata
Anello di posizione
Anello di posizione
+
+
-
Following
Following
Error
Error
NOP
SERVO
Comando
Comando
di velocità
di velocità
OFF
Comando
di posizione
ML-II
SERVO
Anello di posizione
Anello di velocità
Anello di coppia
E
M
E
M
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 43
Page 44

Filosofia del sistema
Velocità di MECHATROLINK-II ATYPE = 41
Con SERVO = ON, l'anello di velocità viene chiuso nell'unità
TJ1-MC__.
La velocità di riferimento viene inviata al servoazionamento.
Con SERVO = OFF, la velocità di riferimento viene inviata
mediante il comando S_REF. 0 x 40.000.000 significa
velocità massima del servomotore.
Coppia di MECHATROLINK-II ATYPE = 42
Con SERVO = ON, l'anello di coppia viene chiuso nell'unità
TJ1-MC__. Il riferimento della coppia nel servoazionamento
dipende da FE e dal guadagno.
Con SERVO = OFF, il riferimento della coppia viene inviato
direttamente mediante il comando T_REF. 0 x 40.000.000
è la coppia massima del servomotore.
Nota
Per monitorare la coppia nel servoazionamento
DRIVE_MONITOR
in
, impostare
DRIVE_CONTROL = 11
Fig. 33
TJ1-MC16 TJ1-ML16 SERVO
Anello di posizione
Anello di posizione
Generatore
di profili
OFF
Posizione
richiesta
Posizione
misurata
+
+
SERVO
-
–
Following
Following
Error
Error
SERVO_AXIS (n) = ON/OFF
S_REF
Comando
Comando
di velocità
di velocità
SERVOSERVO
OFF
Comando
di velocità
ML-II
Anello di velocità
Anello di coppia
E
M
E
M
Fig. 34
TJ1-MC16 TJ1-ML16 SERVO
SERVO
Generatore
di profili
OFF
Posizione
richiesta
.
Posizione
misurata
Anello di posizione
Anello di posizione
+
+
-
–
Following
Following
Error
Error
T_REF
Comando
Comando
di coppia
di coppia
OFF
SERVO
Comando
di coppia
ML-II
Anello di coppia
Revisione 3.0
E
E
MANUALE DI RIFERIMENTO HARDWARE 44
M
M
Page 45

Filosofia del sistema
Uscita passo-passo ATYPE = 43
Quando il profilo della posizione viene generato, l'uscita del
sistema consiste in un treno di impulsi e un segnale di direzione. Ciò
si rivela utile per controllare un motore mediante gli impulsi o come
riferimento della posizione per un'altra unità di controllo assi.
Servoasse ATYPE = 44
Con
SERVO = ON
della velocità di riferimento e un ingresso di retroazione encoder
incrementale. L'anello di posizione viene chiuso nell'unità TJ1-MC__,
che invia all'asse la velocità di riferimento risultante.
, si tratta di un asse con un'uscita analogica
Generatore di profili
Posizione
richiesta
TJ1-MC16
Posizione
+
_
Following
Error
Fig. 35
Comando
di velocità
TJ1-FL02
Servoazionamento
+_
10 V
M
Posizione
misurata
Segnale encoder
Con SERVO = OFF, viene letta la posizione dell'encoder
Fig. 36
incrementale esterno. L'uscita analogica può essere impostata
solo con i comandi BASIC e utilizzata per scopi generali.
TJ1-FL02
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 45
TJ1-MC16
Posizione
misurata
E
Page 46

Filosofia del sistema
Uscita encoder ATYPE = 45
Quando il profilo della posizione viene generato, l'uscita del sistema
consiste in un impulso dell'encoder incrementale. Ciò si rivela utile
per controllare un motore mediante gli impulsi o come riferimento
della posizione per un'altra unità di controllo assi.
Fig. 37
Generatore di profili
Tamagawa assoluto ATYPE = 46
Con SERVO = ON, si tratta di un asse con un'uscita analogica
della velocità di riferimento e una retroazione di Tamagawa
assoluto. L'anello di posizione viene chiuso nell'unità TJ1-MC__
e la velocità di riferimento risultante viene inviata all'asse.
Con
SERVO = OFF
, viene letta la posizione dell'encoder Tamagawa
assoluto esterno. L'uscita analogica può essere impostata solo con
i comandi BASIC e utilizzata per scopi generali.
EnDat assoluto ATYPE = 47
Con SERVO = ON, si tratta di un asse con un'uscita analogica
della velocità di riferimento e una retroazione di EnDat assoluto.
L'anello di posizione viene chiuso nell'unità TJ1-MC__ e la velocità
di riferimento risultante viene inviata all'asse.
Con SERVO = OFF, viene letta la posizione dell'encoder EnDat
assoluto esterno. L'uscita analogica può essere impostata solo
con i comandi BASIC e utilizzata per scopi generali.
SSI assoluto ATYPE = 48
Con SERVO = ON, si tratta di un asse con un'uscita analogica
della velocità di riferimento e una retroazione di SSI assoluto.
L'anello di posizione viene chiuso nell'unità TJ1-MC__
Revisione 3.0
e la velocità di riferimento risultante viene inviata all'asse.
Con SERVO = OFF, viene letta la posizione dell'encoder SSI
assoluto esterno. L'uscita analogica può essere impostata
solo con i comandi BASIC e utilizzata per scopi generali.
ASSE 1
ATYPE = 45
Posizione
misurata
TJ1-FL02
MANUALE DI RIFERIMENTO HARDWARE 46
Page 47

Filosofia del sistema
Riepilogo dei tipi di assi e delle modalità di controllo
Nella tabella riportata di seguito sono elencati i tipi di assi e le relative
modalità consigliate per il controllo di velocità, posizione e coppia.
/i
ATYPE SERVO Modalità Commento
40 0 Posizione
(MECHATROLINK-II)
L'anello di posizione viene chiuso nel servoazionamento.
Non sono consentiti nuovi comandi di movimento.
40 1 Posizione
(MECHATROLINK-II)
41 0 Velocità
(MECHATROLINK-II)
41 1 Posizione
(MECHATROLINK-II)
42 0 Coppia
(MECHATROLINK-II)
42 1 Posizione mediante
coppia
(MECHATROLINK-II)
44, 46,
47, 48
44, 46,
47, 48
0 Velocità
(Asse flessibile)
1 Posizione
(Asse flessibile)
Modalità consigliata per il controllo della posizione con gli
assi MECHATROLINK-II.
Modalità consigliata per il controllo della velocità con gli
assi MECHATROLINK-II. Impostare la velocità con
L'anello di posizione viene chiuso nell'unità Trajexia.
Le prestazioni ottenute sono inferiori rispetto alla chiusura
dell'anello di posizione nel servoazionamento.
Modalità consigliata per il controllo della coppia con gli assi
MECHATROLINK-II. Impostare la coppia con
L'anello di posizione viene chiuso nell'unità Trajexia.
L'uscita dell'anello di posizione viene inviata come
riferimento della coppia al servoazionamento.
Modalità consigliata per il controllo della velocità con l'asse
flessibile.
L'anello di posizione viene chiuso nell'unità Trajexia.
Modalità consigliata per il controllo della posizione
con l'asse flessibile.
S_REF
T_REF
.
.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 47
Page 48

Filosofia del sistema
2.8 Buffer di movimento
Il buffer di movimento è la memorizzazione temporanea
nel generatore di profili delle istruzioni sul movimento
presenti nel programma in BASIC.
L'esecuzione del programma in BASIC continua mentre
le istruzioni attendono nel buffer.
Esistono tre tipi di buffer:
• MTYPE: il movimento attualmente in esecuzione.
mtype si riferisce all'asse e non al processo.
• NTYPE: il nuovo movimento in attesa di esecuzione.
ntype si riferisce all'asse e non al processo.
• Buffer di processo: il terzo movimento memorizzato
nel buffer non può essere monitorato. Il buffer di processo
si riferisce al processo e non all'asse.
• Per verificare se il buffer di processo sia pieno, è possibile
controllare il parametro di processo PMOVE.
Quando si esegue un'istruzione di movimento del
programma in BASIC, questa viene caricata nel buffer
di processo e distribuita al buffer di asse corrispondente
nella sequenza di movimento successiva.
Se viene eseguita una quarta istruzioni di movimento
e i tre buffer sono pieni, l'esecuzione del programma
in BASIC si interrompe fino a quando un buffer
di processo non diventa disponibile.
PROGRAMMA IN BASIC
PROGRAMMA IN BASIC
..... ..
..... ..
MOVE(-500)
MOVE(-500)
..... ..
..... ..
MOVE(1000)
MOVE(1000)
..... ..
..... ..
CONNECT(1,1)
CONNECT(1,1)
..... ..
Processo 1
Processo 2
Processo 3
Processo 4
Processo 5
Processo 6
Processo 7
Fig. 38
CONNECT(1,1) AXIS(2)
BUFFER DI PROCESSO
Fig. 39
Buffer di processo
Buffer di processo
Buffer di processo
Buffer di processo
Buffer di processo
Buffer di processo
Buffer di processo
BUFFER DI ASSE
(uno per asse)
NTYPE
MTYPE
COMANDO DI MOVIMENTO
COMANDO DI MOVIMENTO
Generatore di profili
Asse 0
Asse 1
Asse 2
Asse 3
IN ATTESA
NTYPE
NTYPE
NTYPE
NTYPE MTYPE
in attesa di esecuzione
attualmente in esecuzione
POSIZIONE
RICHIESTA
IN ESECUZIONE
MTYPE
MTYPE
MTYPE
Asse 15
NTYPE MTYPE
Ogni asse dispone di 2 buffer:
NTYPE e MTYPE
Revisione 3.0
Processo 14
Buffer di programma
Ogni processo dispone
di un “buffer di processo”
MANUALE DI RIFERIMENTO HARDWARE 48
Page 49

Filosofia del sistema
Esempio di istruzioni memorizzate nel buffer:
Revisione 3.0
ESEMPIO:
PROGRAMMA IN BASIC
.......
MOVE(-500)
.......
MOVE(1000)
.......
DATUM(3)
.......
MOVE(200)
.......
PROGRAMMA IN BASIC
.......
MOVE(-500)
.......
MOVE(1000)
.......
DATUM(3)
.......
MOVE(200)
.......
PROGRAMMA IN BASIC
.......
MOVE(-500)
.......
MOVE(1000)
.......
DATUM(3)
.......
MOVE(200)
.......
PROGRAMMA IN BASIC
PROGRAMMA IN BASIC
.......
.......
MOVE(-500)
MOVE(-500)
.......
.......
MOVE(1000)
MOVE(1000)
.......
.......
DATUM(3)
DATUM(3)
.......
.......
MOVE(200)
MOVE(200)
.......
.......
PROGRAMMA IN BASIC
PROGRAMMA IN BASIC
.......
.......
MOVE(-500)
MOVE(-500)
.......
.......
MOVE(1000)
MOVE(1000)
.......
.......
DATUM(3)
DATUM(3)
.......
.......
MOVE(200)
MOVE(200)
.......
.......
PROGRAMMA IN BASIC
PROGRAMMA IN BASIC
.......
.......
MOVE(-500)
MOVE(-500)
.......
.......
MOVE(1000)
MOVE(1000)
.......
.......
DATUM(3)
DATUM(3)
.......
.......
MOVE(200)
MOVE(200)
.......
.......
BUFFER
--------------------------------NTYPE IDLE
--------------------------------MTYPE MOVE(-500)
- - - -
BUFFER
- - - -
--------------------------------NTYPE MOVE(1000)
--------------------------------MTYPE MOVE(-500)
BUFFER
DATUM(3)
--------------------------------NTYPE MOVE(1000)
--------------------------------MTYPE MOVE(-500)
BUFFER
MOVE(200)
MOVE(200)
---------------------------------
--------------------------------NTYPE DATUM(3)
NTYPE DATUM(3)
---------------------------------
--------------------------------MTYPE MOVE(1000)
MTYPE MOVE(1000)
BUFFER
- - - - - -
- - - - - -
---------------------------------
--------------------------------NTYPE MOVE(200)
NTYPE MOVE(200)
---------------------------------
--------------------------------MTYPE DATUM(3)
MTYPE DATUM(3)
BUFFER
- - - - - -
- - - - - -
---------------------------------
--------------------------------NTYPE IDLE
NTYPE IDLE
---------------------------------
--------------------------------MTYPE MOVE(200)
MTYPE MOVE(200)
MOVE -500
MOVE -500
MOVE -500
MOVE -500
MOVE -500
Fig. 40
MOVE -500
MOVE(1000)
MOVE(1000)
MOVE(1000)
DATUM(3)
DATUM(3) MOVE(200)
1.- Tutti i buffer sono
vuoti e viene caricato
un movimento. Inizia
l'esecuzione del
movimento.
2.- Un secondo movimento
viene caricato mentre
il primo non è ancora finito.
Il nuovo movimento attende
nel secondo buffer.
3.- Nel buffer di processo
è possibile memorizzare
anche un terzo movimento.
Se il programma in BASIC
raggiunge “MOVE(200)”,
il movimento viene messo
in attesa.
4.- Il primo movimento
è terminato. Il buffer
si sposta di una posizione.
Inizia l'esecuzione del
movimento successivo.
5.- Quando i movimenti
inviati sono finiti, il buffer
si svuota.
6.- Se non vengono
eseguiti nuovi movimenti,
infine, il buffer diventa vuoto
e il generatore di profili
diventa inattivo.
MANUALE DI RIFERIMENTO HARDWARE 49
Page 50

Filosofia del sistema
2.9 Sistema meccanico
2.9.1 Coefficiente di inerzia
Il coefficiente di inerzia è un criterio di stabilità. Più elevata è l'inerzia
del carico rispetto a quella del motore, più bassi sono i guadagni
che è possibile impostare nel sistema prima di raggiungere
l'oscillazione e minori le prestazioni che è possibile ottenere.
Con un coefficiente di 1:30 per servoazionamenti piccoli e di 1:5
per servoazionamenti grandi è possibile raggiungere la dinamica
massima della combinazione servoazionamento-motore.
2.9.2 Rigidità
Se una macchina è più rigida e meno elastica, è possibile
impostare guadagni più elevati senza vibrazione, ottenendo
così maggiore dinamicità e minore presenza di Following Error.
2.9.3 Frequenza di risonanza
Un sistema meccanico dispone di almeno una frequenza
di risonanza. Se eccitato fino alla frequenza di risonanza,
il sistema meccanico inizia l'oscillazione. Per i sistemi di movimento,
è più indicato disporre di sistemi meccanici con una frequenza di
risonanza molto elevata, ovvero con inerzia bassa e rigidità elevata.
La frequenza di risonanza del sistema meccanico è il limite delle
impostazioni di guadagno.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 50
Page 51

Riferimento hardware
3 Riferimento hardware
3.1 Introduzione
Trajexia è la piattaforma di controllo assi di OMRON che offre
le prestazioni e la facilità d'uso di un sistema dedicato.
Trajexia è un sistema modulare stand alone dotato della massima
flessibilità e scalabilità. L'elemento propulsivo di Trajexia è il
coordinatore di movimento multitasking TJ1. Grazie a un DSP a 32 bit,
è in grado di eseguire, usando semplici comandi di movimento, task
come camma elettronica, sincronizzazione, controllo di monitoraggio
e interpolazione.
Trajexia offre il controllo per un massimo di 16 assi su un bus
MECHATROLINK-II o il controllo tradizionale analogico o a impulsi,
con un controllo di posizione, velocità e coppia indipendente per
ogni asse. Inoltre, l'esauriente serie di istruzioni sul movimento,
ne rende la programmazione semplice e intuitiva.
È possibile scegliere tra una vasta gamma di inverter
e servoazionamenti diretti, lineari e rotativi tra i migliori
disponibili sul mercato. Il sistema è scalabile fino a un
massimo di 16 assi e 8 inverter e moduli di I/O.
HMI serie NS
I/O digitale
Hostlink
MECHATROLINK-II
Fig. 1
PLC della serie CJ Trajexia Tools
CX-one
Ethernet
Master
PROFIBUS-DP
Master
DEVICENET
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 51
Page 52

Riferimento hardware
3.1.1 Caratteristiche distintive di Trajexia
Di seguito sono descritte le principali caratteristiche distintive del sistema
Trajexia.
Connettività diretta via Ethernet
Il connettore Ethernet incorporato di Trajexia fornisce una connettività
diretta e rapida a PC, PLC, HMI e altri dispositivi, fornendo al tempo stesso
un accesso completo ai servoazionamenti tramite un bus MECHATROLINK-II.
Consente lo scambio di messaggi espliciti tramite Ethernet e attraverso
MECHATROLINK-II, offrendo totale trasparenza fino al livello di azionatore
e rendendo possibile l'accesso remoto.
Tutela del know-how dell'utente
Il metodo di cifratura di Trajexia garantisce la completa protezione
e riservatezza del prezioso know-how dell'utente.
Porta seriale e I/O locali
Un connettore seriale fornisce la connettività diretta con qualsiasi OMRON
PLC, HMI o altro dispositivo sul campo. I 16 ingressi e le e 8 uscite di I/O
dell'unità controllo assi, integrati e liberamente configurabili, consentono
di configurare Trajexia in base alla progettazione della macchina.
Servoazionamenti e inverter
Per soddisfare ogni requisito di compattezza, prestazioni e affidabilità,
è disponibile un'ampia scelta di servoazionamenti diretti, lineari e rotativi,
nonché di inverter. Gli inverter collegati a MECHATROLINK-II vengono
azionati con lo stesso tempo di ciclo di aggiornamento dei servoazionamenti.
Moduli di I/O remoti
I moduli di I/O del bus MECHATROLINK-II consentono l'espansione
del sistema, mantenendo i dispositivi sotto un unico bus.
PROFIBUS-DP
Lo slave PROFIBUS-DP fornisce alla macchina la connettività alla rete
PROFIBUS.
DeviceNet
Lo slave DeviceNet fornisce alla macchina la connettività alla rete DeviceNet.
Master MECHATROLINK-II
Il master MECHATROLINK-II controlla fino a 16 servoazionamenti,
inverter o moduli di I/O, sempre consentendo totale trasparenza in tutto
il sistema. MECHATROLINK-II offre velocità di comunicazione e precisione
dei tempi essenziali per garantire un perfetto controllo del movimento dei
servoazionamenti. È possibile selezionare un tempo di ciclo del movimento
di 0,5 ms, 1 ms o 2 ms.
TJ1-FL02 (modulo assi flessibile)
TJ1-FL02 consente di ottenere il pieno controllo di due attuatori tramite
Revisione 3.0
un'uscita analogica o treno di impulsi. Il modulo supporta i protocolli
principali di encoder assoluti consentendo il collegamento di un encoder
esterno al sistema.
MANUALE DI RIFERIMENTO HARDWARE 52
Page 53

Riferimento hardware
3.1.2 Trajexia Tools
Un software
Lo strumento di programmazione intuitivo e di facile utilizzo
di Trajexia, basato sulle istruzioni BASIC relative al movimento,
comprende comandi dedicati per il collegamento di assi, camme
elettroniche, sincronizzazione e così via. Il multitasking offre
flessibilità nella progettazione delle applicazioni. I comandi
di movimento vengono memorizzati in un buffer, consentendo
l'esecuzione dei programmi in BASIC durante l'esecuzione
dei movimenti.
Una connessione
I parametri e le funzioni dei servoazionamenti di MECHATROLINK-II
sono completamente accessibili dalla connessione Ethernet.
Un minuto
Trajexia Tools include strumenti di debug avanzati, con
funzioni di registrazione e oscilloscopio, in grado di assicurare
funzionamento efficiente e tempi di arresto minimi.
I servoazionamenti, gli inverter e i moduli di I/O collegati
al bus MECHATROLINK-II vengono identificati e configurati
automaticamente, rendendo possibile l'impostazione del sistema
in pochi minuti.
Fig. 2
3.1.3 Questo manuale
Questo Manuale di riferimento hardware fornisce le seguenti
informazioni:
• La descrizione, le connessioni e l'utilizzo delle unità Trajexia.
• La descrizione, le connessioni e l'utilizzo degli slave
MECHATROLINK-II.
• Una dettagliata filosofia della progettazione del sistema
Revisione 3.0
per ottenere i migliori risultati con l'utilizzo di Trajexia.
MANUALE DI RIFERIMENTO HARDWARE 53
Page 54

Riferimento hardware
3.2 Tutte le unità
3.2.1 Installazione del sistema
Un sistema Trajexia è composto dalle seguenti unità:
• Un modulo di alimentazione.
• Un'unità TJ1-MC__ (unità di controllo assi). Può essere uno
dei seguenti:
– TJ1-MC16. Supporta 16 assi reali o virtuali, in totale 16 assi.
– TJ1-MC04. Supporta 5 assi reali e fino a 16 assi virtuali,
in totale 16 assi.
• Fino a 7 moduli di espansione.
• Un modulo TJ1-TER (terminatore).
I moduli di espansione (numerati da 0 a 6) possono essere disposti
in qualsiasi ordine. TJ1-MC__ esegue il rilevamento automatico
di tutte le unità.
Un sistema Trajexia con un'unità TJ1-MC16 può includere:
• 0 ... 4 TJ1-ML__ (modulo master MECHATROLINK-II).
• 0 ... 7 moduli TJ1-FL02.
• 0 o 1 modulo TJ1-PRT (modulo slave PROFIBUS-DP)
o TJ1-DRT (modulo slave DeviceNet)
1
.
Un sistema Trajexia con un'unità TJ1-MC04 può includere:
• 0 ... 4 moduli TJ1-ML__.
• 0 ... 3 moduli TJ1-FL02.
• 0 o 1 modulo TJ1-PRT o TJ1-DRT
•
.
modulo:
Fig. 3
–1Numero
0123456
Revisione 3.0
1. Trajexia non supporta in uno stesso sistema la presenza
di entrambi i moduli TJ1-PRT e TJ1-DRT.
MANUALE DI RIFERIMENTO HARDWARE 54
Page 55

Riferimento hardware
Nella figura è rappresentato un esempio di configurazione semplice.
A. Alimentazione
B. TJ1-MC__
C. TJ1-ML__
D. Servoazionamento Sigma-II
E. Modulo di interfaccia NS115 MECHATROLINK-II
F. Servomotore Sigma-II
G. TJ1-TER
Fig. 4
M
C
1
6
O
M
R
O
N
MOTION CONTROLLER
CN3
G
C
B
A
0
1
2
3
4
M
L
5
6
7
1
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
F
D
E
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 55
Page 56

Riferimento hardware
1. Estrarre tutte le unità dalla confezione. Controllare che
le unità siano complete.
2. Non rimuovere le etichette di protezione dalle unità.
3. Per scollegare TJ1-MC__ e TJ1-TER, spingere in avanti
le clip (A) situate sul lato superiore e inferiore di TJ1-TER.
4. Scollegare TJ1-TER da TJ1-MC__.
5. Spingere in avanti le clip (A) situate sul lato superiore e inferiore
di tutte le unità.
Fig. 5
MC16
O
M
R
O
N
M
O
T
IO
N
C
O
N
C
N
3
Fig. 6
A
0
1
2
3
T
R
O
4
L
L
E
R
5
6
7
C
N
1
T
E
R
M
O
N
/O
F
F
W
IR
E
2
/4
C
N
2
A
MC16
0
OM
1
RON
2
MOTION CONTROLLER
3
4
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 56
Page 57

Riferimento hardware
6. Collegare l'unità TJ1-MC__ (C) al modulo di alimentazione (B).
7. Spingere indietro le clip (A) situate sul lato superiore e inferiore.
Fig. 7
Fig. 8
MC16
OMRON
MOTION CONTROLLER
CN3
CB
0
1
2
3
4
5
6
7
CN1
TERM
ON/OFF
WIRE
2/4
CN2
A
MC16
0
OMRON
1
2
MOTION
3
CON
TROLLER
4
5
6
7
CN
3
CN
1
TERM
O
N/OFF
W
IRE
2/4
CN
2
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 57
Page 58

Riferimento hardware
8. Ripetere i due passi precedenti per tutte le unità.
9. Accertarsi che l'ultimo modulo sia TJ1-TER.
10. Tirare verso il basso tutte le clip (D) di tutte le unità.
11. Fissare il sistema Trajexia alla guida DIN in posizione verticale
per consentire un adeguato raffreddamento. La guida DIN
consigliata è di tipo PFP-100N2, PFP-100N o PFP-50N.
12. Tirare verso l'alto tutte le clip (D) di tutte le unità.
13. Dopo aver completato il cablaggio delle unità, rimuovere
le etichette protettive dalle unità.
Fig. 9
Fig. 10
MC16
O
M
R
O
N
MOTION CONTROLLER
A
0
1
2
3
4
5
6
7
CN3
M
L
1
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
D
MC16
0
O
1
M
R
O
N
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
C
N
3
ML16
5
6
7
C
N
1
T
E
R
M
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
R
U
N
8
F
C
N
1
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 58
Page 59

Riferimento hardware
14. Non installare le unità Trajexia in una di queste posizioni:
• Capovolta
• Con il lato superiore avanti
• Con il lato inferiore avanti
• Verticalmente
Fig. 11
2
N
C
/4
2
E
R
I
W
F
F
/O
N
O
M
R
E
1
N
C
F
8
N
U
R
T
3
N
C
1
N
C
7
R
E
L
L
O
R
T
N
O
C
N
IO
T
O
M
6
OMRON
5
4
3
2
1
0
ML16
MC16
CN1
F
N
8
U
R
L16
M
C16
M
2
CN
E
N1
C
2/4
N/OFF
WIR
ERM
O
T
7
6
5
4
3
2
1
0
R
E
LL
CN3
CONTRO
MOTION
OMRON
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 59
Page 60

Riferimento hardware
15. In fase di progettazione del cabinet per le unità, accertarsi
che vi siano almeno 20 mm di spazio intorno alle unità per
consentire un'adeguata circolazione dell'aria. Omron consiglia
di lasciare almeno 100 mm di spazio intorno alle unità.
Fig. 12
Canalina
Unità
Canalina
20 mm min.
Guida DIN
20 mm min.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 60
Page 61

Riferimento hardware
3.2.2 Condizioni ambientali e di stoccaggio per tutte le unità
/i
Voce Caratteristiche
Temperatura ambiente
di funzionamento
0 ... 55°C
Umidità ambiente
di funzionamento
Temperatura ambiente
di stoccaggio
Umidità di stoccaggio 90% max. (senza formazione di condensa)
Atmosfera Assenza di gas corrosivi
Resistenza alle vibrazioni 10 ... 57 Hz: (0,075 mm in ampiezza)
Resistenza agli urti 147 m/s
Resistenza di isolamento 20 MΩ
Rigidità dielettrica 500 Vc.a.
Grado di protezione IP20
Standard internazionali CE, EN 61131-2, cULus, Lloyds
Dal 10 al 90% di umidità relativa
(senza condensa)
–20 ... 70°C (batteria esclusa)
57 ... 100 Hz: Accelerazione: 9,8 m/s2
in ciascuna delle direzioni X, Y e Z per
80 minuti
2
nelle direzioni X,
Y e Z per 3 volte ciascuna
(cULus in attesa di approvazione
per TJ1-MC04 e TJ1-ML04)
Conforme a RoHS
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 61
Page 62

Riferimento hardware
3.2.3 Dimensioni delle unità
Di seguito sono riportate le dimensioni delle unità
del sistema Trajexia.
Unità controllo assi Trajexia
Tutte le dimensioni sono espresse in millimetri.
Fig. 13
Revisione 3.0
65
62
71
94
90
70,3
MANUALE DI RIFERIMENTO HARDWARE 62
Page 63

Riferimento hardware
Unità Trajexia
Tutte le dimensioni sono espresse in millimetri.
Fig. 14
31
39,9
94
90
70,3
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 63
Page 64

Riferimento hardware
Sistema Trajexia
Tutte le dimensioni sono espresse in millimetri.
PA202
Fig. 15
65
90
94
La profondità di installazione del sistema Trajexia è al massimo
di 90 mm e dipende dai moduli che vengono montati. Lasciare
una profondità sufficiente nel quadro di controllo.
3.2.4 Cablaggio dei connettori Weidmüller
L'unità TJ1-MC__ e i moduli TJ1-FL02 dispongono di connettori
Revisione 3.0
e contro-connettori Weidmüller. Per eseguire il cablaggio dei
contro-connettori Weidmüller, effettuare i seguenti passi:
Fig. 16
62
94
29,73145
90
70,30
81,60 ... 89 mm
MANUALE DI RIFERIMENTO HARDWARE 64
Page 65

Riferimento hardware
1. Rimuovere la guaina dai fili.
2. Per agevolare l'inserimento dei fili, attorcigliarli.
3. Se necessario, comprimere i puntali normali
(nella parte superiore) o con collare (nella parte inferiore).
4. Inserire il cacciavite nel foro interno (quadrato). Spingere a fondo.
5. Inserire il filo nel foro esterno (circolare).
6. Rimuovere il cacciavite.
7. Verificare che non vi siano fili lenti.
Cablaggio
/i
Voce Caratteristiche
Tipi di cavo 0,14–1 mm
Solido, semirigido o semirigido con puntale:
• Comprimere i puntali in base a DIN46228/1
• Comprimere i puntali con collare in plastica
• Con l'utensile consigliato Weidmüller PZ6
Utensile di
inserimento
Tipi di puntali
consigliati
Lunghezza senza
guaina
Cacciavite a punta piatta da 2,5 mm
Weidmüller
AEH H0,14/12
AEH H0,25/12
AEH H0,34/12
7 mm senza puntali (tolleranza: +1 mm, –0 mm)
10 mm con puntali (tolleranza: +1 mm, –0 mm)
2
in base a DIN46228/4
Fig. 17
Dimensioni del conduttore
/i
Voce Caratteristiche
Intervallo di
bloccaggio
Fili senza puntale 0,5–1 mm
Revisione 3.0
Fili con puntale AEH H0,14/12, 0,13 mm
0,08–1 mm
AEH H0,25/12, 0,25 mm
AEH H0,34/12, 0,34 mm
MANUALE DI RIFERIMENTO HARDWARE 65
2
2
2
2
2
Page 66

Riferimento hardware
3.3 Modulo di alimentazione
3.3.1 Introduzione
Il modulo di alimentazione (PSU, Power Supply Unit) fornisce
l'alimentazione alle altre unità presenti nel sistema Trajexia, per il
quale è possibile utilizzare tre diversi tipi di moduli di alimentazione:
• CJ1W-PA202
• CJ1W-PA205R
• CJ1W-PD025
3.3.2 Collegamenti del PSU
Ogni modulo di alimentazione dispone di sei terminali.
/i
Voce CJ1W-PA202 CJ1W-PA205R CJ1W-PD025
A Ingresso 110–240 Vc.a. Ingresso 110–240 Vc.a. Ingresso 24 Vc.c.
B Ingresso 110–240 Vc.a. Ingresso 110–240 Vc.a. Ingresso 0 V
1
C Linea di messa a terra
D Messa a terra
EN/C
F N/C Contatto a relè Wdog N/C
Linea di messa a terra
2
Messa a terra
3
Contatto a relè Wdog
1. Il terminale della linea di messa a terra (C) è un terminale
neutro con funzione di filtro di protezione dalle interferenze.
Se le interferenze sono una causa frequente di errori
o le scosse elettriche costituiscono un problema, collegare
il terminale della linea di messa a terra al terminale
di messa a terra (D) e collegare a terra entrambi i terminali
con una resistenza inferiore a 100 Ohm.
2. Per prevenire le scosse elettriche, collegare il terminale
di messa a terra (D) alla messa a terra con una resistenza
inferiore a 100 Ohm con un filo da 14 AWG o con area
2
.
Revisione 3.0
di sezione trasversale minima di 2 mm
3. I terminali E ed F di CJ1W-PA205R sono contatti
a relè che si chiudono quando Wdog è abilitato.
Vedere i comandi BASIC nel Manuale di programmazione.
Linea di messa a terra
Messa a terra
N/C
Fig. 18
G
XXXXX
AC100
-240V
INPUT
L2/N
POWER
A
L1
B
C
D
NC
NC
E
F
MANUALE DI RIFERIMENTO HARDWARE 66
Page 67

Riferimento hardware
Ogni modulo di alimentazione presenta un LED verde (G), che si accende
quando il modulo di alimentazione viene collegato alla fonte di alimentazione.
Attenzione
Serrare le viti sulla morsettiera del modulo di alimentazione
applicando la coppia di 1,2 N m. La presenza di viti allentate
può provocare cortocircuito, errori di funzionamento o incendio.
3.3.3 Caratteristiche del PSU
/i
Modulo di
alimentazione
CJ1W-PA202 110–240 Vc.a. 2,8 A 0,4 A 14 W
CJ1W-PA205R 110–240 Vc.a. 5 A 0,8 A 25 W
CJ1W-PD025 24 Vc.c. 5 A 0,8 A 25 W
Attenzione
La quantità di corrente e potenza che può essere erogata
al sistema è limitata dalla capacità del modulo di alimentazione.
Per la progettazione del sistema, fare riferimento a questa tabella
in modo che l'assorbimento di corrente totale da parte delle unità
presenti nel sistema non ecceda la corrente massima per ciascun
gruppo di tensione.
L'assorbimento di potenza totale per il modulo di alimentazione
non deve superare il massimo.
Ingresso
Tensione
Assorbimento
di corrente massimo
Gruppo 5 V Gruppo 24 V
Potenza
in uscita
3.3.4 Contenuto della confezione del PSU
• Istruzioni di sicurezza.
• Modulo di alimentazione.
• Etichetta di protezione attaccata alla superficie superiore del modulo.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 67
Page 68

Riferimento hardware
3.4 TJ1-MC__
3.4.1 Introduzione
TJ1-MC__ è l'elemento propulsivo del sistema Trajexia. È possibile
programmarlo con il linguaggio di programmazione BASIC per
controllare i moduli di espansione e i servomotori ad essi collegati.
Vedere il Manuale di programmazione.
Esistono due versioni di TJ1-MC__. TJ1-MC04 supporta 4 assi.
TJ1-MC16 supporta 16 assi.
TJ1-MC__ presenta i seguenti componenti visibili.
/i
Fig. 19
Componente Descrizione
A Display a LED
B LED I/O 0–7
CBatteria
D Connettore Ethernet
E Selettore TERM ON/OFF
F Selettore WIRE 2/4
G Connettore seriale
H Connettore di I/O a 28 pin
Revisione 3.0
A
B
C
D
E
F
G
H
MANUALE DI RIFERIMENTO HARDWARE 68
Page 69

Riferimento hardware
3.4.2 Display a LED
Il display a LED visualizza le seguenti informazioni.
Informazioni Quando
Indirizzo IP
e maschera
di sottorete
Indirizzo IP Quando si collega un cavo Ethernet a un connettore
RUN Quando è in funzione un servoazionamento di TJ1-MC__.
OFF Quando non è in funzione alcun servoazionamento
ERR + codice Quando nel sistema Trajexia si verifica un errore.
Quando il sistema Trajexia viene collegato al modulo
di alimentazione, il display a LED visualizza 3 volte
queste informazioni.
Ethernet di TJ1-MC__ e a un PC, il display a LED
visualizza 4 volte queste informazioni
di TJ1-MC__.
Il codice è quello dell'errore. Vedere il capitolo sulla
risoluzione dei problemi nel Manuale di programmazione.
Fig. 20/i
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 69
Page 70

Riferimento hardware
3.4.3 Collegamenti di TJ1-MC__
L'unità TJ1-MC__ è dotata dei seguenti connettori:
• Un connettore Ethernet per il collegamento a un PC o a una
rete Ethernet (D).
• Un connettore seriale (G).
• Un connettore di I/O a 28 pin (H).
I componenti del connettore seriale e del connettore a 28 pin sono
forniti.
Connettore Ethernet
Il connettore Ethernet viene utilizzato per effettuare il collegamento
di TJ1-MC__ a un PC o a una rete Ethernet ed è l'unico tipo di
collegamento che è possibile utilizzare per programmare il sistema.
Per questo tipo di collegamento, utilizzare un cavo crossover o un
cavo patch Ethernet. Se si collega il PC direttamente a TJ1-MC__,
e non tramite hub o altro dispositivo di rete, il PC deve avere un
indirizzo IP fisso.
TJ1-MC__ rileva automaticamente il collegamento di un cavo
al connettore Ethernet.
Precauzioni di installazione BASIC
Verificare che il sistema Ethernet sia conforme allo standard IEEE
Std 802.3.
Non installare il sistema Ethernet in prossimità di fonti di interferenze.
Fig. 21
A
B
C
D
E
F
G
H
Precauzioni ambientali
I cavi UTP non sono schermati. In ambienti soggetti a interferenze,
utilizzare un sistema con cavo schermato a doppini intrecciati
(STP) e hub appropriati per un ambiente FA.
Installare i cavi a doppini intrecciati lontani da linee ad alta tensione
e da dispositivi che generano interferenze.
Installare i cavi a doppini intrecciati in luoghi privi di umidità elevata,
Revisione 3.0
senza elevate quantità di polvere e privi di altri fattori contaminanti.
MANUALE DI RIFERIMENTO HARDWARE 70
Page 71

Riferimento hardware
Connettore seriale
Il connettore seriale permette l'utilizzo di tre standard
di comunicazione:
• RS232
• RS422
• RS485
Fig. 22
/i
Pin Comunicazione Collegamento
1 RS422/RS485 /Tx
2RS232 Tx
3RS232 Rx
4N/C N/C
5N/C N/C
6 RS422/RS485 /Rx
7 RS422/RS485 Tx
8 RS422/RS485 Rx
9RS232 0 V
Selettore TERM ON/OFF
Consente di impostare la terminazione on/off del collegamento
seriale RS422/485. L'impostazione del selettore TERM ON/OFF
dipende dagli standard di comunicazione del collegamento seriale
e dalla posizione di TJ1-MC__ nella rete.
/i
Standard di
comunicazione
RS422 o RS485 Primo o ultimo Sinistra (on)
RS422 o RS485 Né primo, né ultimo Destra (off)
Posizione di TJ1-MC__ Impostazione del selettore
TERM ON/OFF
9
8
7
6
4
3
2
1
5
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 71
Page 72

Riferimento hardware
Selettore WIRE 2/4
Il selettore WIRE 2/4 consente di impostare lo standard
di comunicazione per il collegamento seriale RS422/485.
Per utilizzare uno degli standard di comunicazione, effettuare
quanto indicato di seguito.
/i
Fig. 23
A
Standard di
comunicazione
RS422 Impostare a destra il selettore WIRE 2/4
RS485 Impostare a sinistra il selettore WIRE 2/4
Per selezionarlo
Nota
In modalità RS485, la coppia di trasmissione è collegata
a quella di ricezione.
B
C
D
E
F
G
H
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 72
Page 73

Riferimento hardware
Connettore di I/O a 28 pin
Il connettore a 28 pin è la designazione di un connettore Weidmüller:
B2L 3.5/28 LH.
Pin Collegamento Pin Collegamento
1 Ingresso 0 V comune 2 Ingresso 0 V comune
3 Ingresso 0 4 Ingresso 1
5 Ingresso 2 6 Ingresso 3
7 Ingresso 4 8 Ingresso 5
9 Ingresso 6 10 Ingresso 7
11 Ingresso 8 12 Ingresso 9
13 Ingresso 10 14 Ingresso 11
Fig. 24/i
1
3
5
7
9
11
2
4
6
8
10
12
15 Ingresso 12 16 Ingresso 13
17 Ingresso 14 18 Ingresso 15
19 Uscita 8 20 Uscita 9
21 Uscita 10 22 Uscita 11
23 Uscita 12 24 Uscita 13
25 Uscita 14 26 Uscita 15
27 Uscita 0 V comune 28 Ingresso alimentazione
24 V per le uscite
Revisione 3.0
13
15
17
19
21
23
25
27
14
16
18
20
22
24
26
28
MANUALE DI RIFERIMENTO HARDWARE 73
Page 74

Riferimento hardware
LED 0–7
I LED di I/O LED riflettono l'attività degli ingressi e delle uscite.
Per impostare i LED è possibile utilizzare il comando BASIC
DISPLAY = n.
Nella tabella riportata di seguito è elencata la configurazione
dei LED 0–7 e del comando DISPLAY = n, dove n è un numero
compreso tra 0 e 7.
/i
Etichetta
LED
0 IN 0 IN 8 IN 16 IN 24 OUT 0 OUT 8 OUT 16 OUT 24
1 IN 1 IN 9 IN 17 IN 25 OUT 1 OUT 9 OUT 17 OUT 25
2 IN 2 IN 10 IN 18 IN 26 OUT 2 OUT 10 OUT 18 OUT 26
3 IN 3 IN 11 IN 19 IN 27 OUT 3 OUT 11 OUT 19 OUT 27
4 IN 4 IN 12 IN 20 IN 28 OUT 4 OUT 12 OUT 20 OUT 28
5 IN 5 IN 13 IN 21 IN 29 OUT 5 OUT 13 OUT 21 OUT 29
6 IN 6 IN 14 IN 22 IN 30 OUT 6 OUT 14 OUT 22 OUT 30
7 IN 7 IN 15 IN 23 IN 31 OUT 7 OUT 15 OUT 23 OUT 31
n=0 n=1 n=2 n=3 n=4 n=5 n=6 n=7
Ad esempio, se si utilizza il comando DISPLAY = 1, il LED 5 riflette
l'attività dell'ingresso 13 (pin 16) del connettore di I/O a 28 pin.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 74
Page 75

Riferimento hardware
A
Ingressi digitali
Nella tabella e nella figura riportate di seguito sono elencate le
specifiche degli ingressi digitali (ingressi da 0 a 15) per il modulo
di I/O.
/i
Voce Caratteristiche
Tipo PNP/NPN
Tensione massima 24 Vc.c. + 10%
Fig. 25
limentazione
esterna a 24 V
Ingresso
TJ 1-MC 16
3
Corrente di ingresso 5 mA a 24 Vc.c.
Tensione di attivazione 14,4 Vc.c.
Tensione di disattivazione 5 Vc.c. max.
Ingresso a 0 V
Comune a 0 V per i circuiti di ingresso
1
Le temporizzazioni dipendono dal periodo di servoazionamento
di MC16 e includono i ritardi fisici del circuito di ingresso.
I tempi massimi di risposta di 1.250 µs (per i periodi
di servoazionamento di 0,5 ms o 1 ms) o 2.500 µs
(per un periodo di servoazionamento di 2 ms) si riscontrano
per il periodo compreso tra la modifica della tensione
di ingresso e la modifica corrispondente nel parametro IN.
Uscite digitali
Nella tabella e nella figura riportate di seguito sono elencate
le specifiche delle uscite digitali (da O8 a O15).
/i
Voce Caratteristiche
Tipo PNP
Tensione massima 24 Vc.c. + 10%
Corrente erogabile 100 mA per uscita (800 mA per un gruppo di 8)
Tensione massima 24 Vc.c. + 10%
Protezione Sovracorrente, temperatura oltre i limiti
Revisione 3.0
e un fusibile da 2 A sul comune
Fig. 26
Fusibile da 2 A
Circuito
equivalente
Circuiti interni
Verso altri circuiti di uscita
(galvanicamente isolati dal sistema)
TJ 1-MC 16
Alimentazione
dell'uscita a 24 V28
19 O8
Uscita
27
a 0 V
Carico
Alimentazione
esterna a 24 V
Le temporizzazioni dipendono dal periodo di servoazionamento
di MC16 e includono i ritardi fisici del circuito di uscita.
MANUALE DI RIFERIMENTO HARDWARE 75
Page 76

Riferimento hardware
I tempi massimi di risposta di 250 µs per l'attivazione e 350 µs
per la disattivazione (per i periodi di servoazionamento di 0,5 ms
o 1 ms) o di 500 µs per l'attivazione e 600 µs per la disattivazione
(per un periodo di servoazionamento di 2 ms) si riscontrano per
il periodo compreso tra la modifica nel parametro OP e la modifica
corrispondente nel circuito di uscita digitale.
3.4.4 Batteria
In caso di assenza di alimentazione, la batteria di backup
fornisce l'alimentazione all'orologio in tempo reale e alla RAM,
dove sono memorizzati i programmi e le variabili globali.
È necessario sostituirla ogni cinque anni. Il numero parte
della batteria di backup è CJ1W-BAT01.
Per sostituire la batteria, è necessario disattivare l'alimentazione
per non più di cinque minuti per evitare perdite dei dati nella
memoria di backup. Se prima di sostituire la batteria l'unità
TJ1-MC__ non è stata accesa, accenderla per almeno cinque
minuti altrimenti il condensatore che fornisce l'alimentazione
di backup alla memoria non sarà completamente carico e,
prima che la nuova batteria venga inserita, i dati nella memoria
di backup potrebbe andare perduti.
Fig. 27
A
B
C
D
E
F
G
H
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 76
Page 77

Riferimento hardware
3.4.5 Caratteristiche di TJ1-MC__
/i
Voce Caratteristiche
TJ1-MC04 TJ1-MC16
Alimentazione 5 Vc.c. e 24 Vc.c.
(fornita da un modulo di alimentazione)
Assorbimento totale 3,3 W
Assorbimento di corrente 650 mA a 5 Vc.c.
Peso approssimativo 230 g
Numero di assi 5 (fino a 4 assi su
MECHATROLINK-II)
Numero di inverter e moduli di I/O
Numero di moduli TJ1-ML__ Fino a 4 Fino a 4
Orologio in tempo reale Sì
Tempo di servoazionamento 0,5 ms, 1 ms o 2 ms
Linguaggio di programmazione
Multitasking Fino a 14 task
I/O digitale 16 ingressi digitali e 8 uscite digitali, liberamente
Unità di misura Impostabile dall'utente
Memoria disponibile per
i programmi utente
Capacità di memorizzazione dati Fino a 2 MB di memoria flash per dati
Salvataggio dei dati del
programma sull'unità TJ1-MC__
Salvataggio dei dati
del programma sul PC
Connettori di comunicazione • 1 collegamento Ethernet
Aggiornamento del firmware Mediante il software Trajexia Tools
Revisione 3.0
Caratteristiche elettriche
del connettore Ethernet
Connettore Ethernet RJ45
Fino a 8 su
MECHATROLINK-II
Linguaggio basato su BASIC per il controllo del movimento
configurabili
500 KB
• Backup di memoria RAM e flash
• Batteria di backup
Il software Trajexia Tools gestisce i backup sul disco
rigido del PC
• 2 collegamenti seriali
Conforme a IEEE 802.3 (100BaseT)
16
Fino a 8 su
MECHATROLINK-II
Connettori seriali 1 e 2
/i
Voce Caratteristiche
Caratteristiche elettriche • PORT1: RS232C, non isolato
• PORT2: RS485/RS422A, isolato
Connettore Connettore SUB-D9
Velocità di trasmissione
Formato di trasmissione,
lunghezza del bit di dati
Formato di trasmissione,
bit di stop
Formato di trasmissione,
bit di parità
Modalità di trasmissione • RS232C: Punto a punto (1:1)
Protocollo di trasmissione • Protocollo master Host Link
Isolamento galvanico Solo connettore RS422/485
Buffer di comunicazione 254 byte
Controllo del flusso Nessuno
Terminatore Sì, selezionato tramite selettore
Lunghezza massima del cavo • RS232C: 15 m
1.200, 2.400, 4.800, 9.600,
19.200 e 38.400 bps
7 o 8 bit
1 o 2 bit
Pari, dispari o nessuno
• RS422/485: Da un punto a più punti (1:N)
• Protocollo slave Host Link
• ASCII per uso generico
• RS422/485: 100 m
MANUALE DI RIFERIMENTO HARDWARE 77
Page 78

Riferimento hardware
3.4.6 TJ1-TER
TJ1-TER assicura che il bus dati interno del sistema Trajexia
funzioni correttamente. In un sistema Trajexia, l'ultima unità
deve sempre essere un terminatore TJ1-TER.
3.4.7 Contenuto della confezione di TJ1-MC__
• Istruzioni di sicurezza
• TJ1-MC__ (batteria inclusa)
• Etichetta di protezione attaccata alla superficie
superiore di TJ1-MC__
• TJ1-TER, collegato a TJ1-MC__
• Parti per un connettore seriale
• Parti per un connettore di I/O
• Due fermi metallici per la guida DIN per evitare
che il sistema Trajexia esca dalla guida
• Clip bianca per sostituire la clip gialla del modulo
di alimentazione
Fig. 28
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 78
Page 79

Riferimento hardware
3.5 TJ1-ML__
3.5.1 Introduzione
TJ1-ML__ controlla i dispositivi MECHATROLINK-II in modo
deterministico e ciclico. Gli slave MECHATROLINK-II possono
essere:
• Servoazionamenti
• Inverter
• Moduli di I/O
TJ1-ML__ presenta i seguenti componenti visibili.
/i
Componente Descrizione
A Indicatori LED
B Connettore bus CN1 MECHATROLINK-II
Il modulo TJ1-ML__ e i relativi dispositivi formano una rete seriale.
Il primo modulo presente nella rete è TJ1-ML__.
• TJ1-ML16 può controllare 16 dispositivi.
TJ1-ML04 può controllare 4 dispositivi.
Fig. 29
ML16
RUN
8F
CN1
A
B
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 79
Page 80

Riferimento hardware
3.5.2 Descrizione dei LED
/i
Etichetta Stato Descrizione
run Spento Test di avvio non riuscito. L'unità non è operativa.
Funzionamento interrotto. Errore fatale.
Acceso Test di avvio completato. Funzionamento normale.
BF Spento Funzionamento normale.
Acceso Errore nel bus MECHATROLINK-II.
– Riservato
3.5.3 Collegamento di TJ1-ML__
Il connettore per bus MECHATROLINK-II (A) è adatto per
un connettore MECHATROLINK-II. Utilizzare questo connettore
per collegare TJ1-ML__ a una rete MECHATROLINK-II.
È necessario che la rete MECHATROLINK-II venga sempre
chiusa con un terminatore MECHATROLINK-II.
Revisione 3.0
Fig. 30
ML16
RUN
8F
CN1
A
MANUALE DI RIFERIMENTO HARDWARE 80
Page 81

Riferimento hardware
Collegamenti di esempio
Esempio 1
• 1 x TJ1-MC__
• 1 x TJ1-ML__
• 3 x servoazionamento Sigma-II
• 1 x terminatore MECHATROLINK-II
Fig. 31
Servoazionamento
Tutti gli indirizzi Mechatrolink
sono numerati 4x (fino a 16 per unità)
Indirizzo
43
Asse 2 Asse 3 Asse 4
Indirizzo44Indirizzo
45
Terminatore
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 81
Page 82

Riferimento hardware
Esempio 2
• 1 x TJ1-MC16
• 2 x TJ1-ML16
• 16 x servoazionamento Sigma-II
• 2 x terminatore MECHATROLINK-II
Fig. 32
Servoazionamento
Indirizzo41Indirizzo42Indirizzo43Indirizzo44Indirizzo45Indirizzo46Indirizzo47Indirizzo
48
Asse 0
Indirizzo
49
Asse 1
Indirizzo4AIndirizzo4BIndirizzo4CIndirizzo4DIndirizzo4EIndirizzo4FIndirizzo
Asse 2
Asse 3
Asse 4
Asse 5
Asse 6
Asse 7
50
Terminatore
Terminatore
Asse 8
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 82
Asse 9
Asse 10
Asse 11
Asse 12
Asse 13
Asse 14
Asse 15
Page 83

Riferimento hardware
I moduli MECHATROLINK-II possono controllare
combinazioni diverse di assi, inverter e moduli di I/O.
Esempio 3
• 1 x TJ1-MC__
• 1 x TJ1-ML16
• 1 x servoazionamento Sigma-II
• 1 x inverter
• 3 x moduli di I/O
• 1 x terminatore MECHATROLINK-II
INVERTER
Tutti gli indirizzi degli inverter
sono numerati 2x
(intervallo valido 20 ... 2F)
Indirizzo
41
Indirizzo
21
Fig. 33
MODULI DI I/O
Gli indirizzi di I/O sono numerati 6x
(intervallo valido 60 ... 6F)
Indirizzo di I/O selezionato sul DIP switch
Indirizzo
61
Indirizzo
62
Indirizzo
63
Terminatore
Allocazioni della memoria di I/O
0 31 32 95 96 159 160 223 224
Asse 0
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 83
Page 84

Riferimento hardware
3.5.4 Caratteristiche di TJ1-ML__
/i
Voce Caratteristiche
TJ1-ML04 TJ1-ML16
Alimentazione 5 Vc.c. (fornita da TJ1-MC__)
Assorbimento totale 1 W
Assorbimento di corrente 200 mA a 5 Vc.c.
Peso approssimativo 75 g
Numero di dispositivi controllati 4 16
Dispositivi controllati
Caratteristiche elettriche Conforme allo standard MECHATROLINK-II
Collegamento di comunicazione 1 connettore master MECHATROLINK-II
Velocità di trasmissione 10 Mbps
Tempo di servoazionamento 0,5 ms, 1 ms o 2 ms
Distanza di trasmissione senza
ripetitore
Revisione 3.0
• Servoazionamenti Sigma-II, Junma-ML e Sigma-III
• Moduli di I/O
• Inverter di frequenza V7, F7 e G7
Fino a 50 m
Dispositivi correlati a TJ1-ML__
/i
Nome Commenti Modello
Moduli di I/O
distribuiti
Cavi per
MECHATROLINK-II
Terminatore
MECHATROLINK-II
Modulo di interfaccia
MECHATROLINK-II
Ingresso digitale a 64 punti e uscita
digitale a 64 punti (24 Vc.c. NPN)
Ingresso digitale a 64 punti e uscita
digitale a 64 punti (24 Vc.c. PNP)
Ingresso analogico: –10 ... +10 V,
4 canali
Uscita analogica: –10 ... +10 V,
2 canali
0,5 m JEPMC-W6003-A5
1 m JEPMC-W6003-01
3 m JEPMC-W6003-03
5 m JEPMC-W6003-05
10 m JEPMC-W6003-10
20 m JEPMC-W6003-20
30 m JEPMC-W6003-30
Resistenza di terminazione JEPMC-W6022
Per servoazionamenti serie Sigma-II
(firmware versione 39 o successiva)
Servoazionamenti della serie Junma SJDE-__ANA-OY
Per inverter Varispeed V7
(per informazioni sulla versione
supportata dell'inverter, contattare
l'ufficio vendite OMRON di zona)
Per inverter Varispeed F7, G7
(per informazioni sulla versione
supportata dell'inverter, contattare
l'ufficio vendite OMRON di zona)
JEPMC-IO2310
JEPMC-IO2330
JEPMC-AN2900
JEPMC-AN2910
JUSP-NS115
SI-T/V7
SI-T
MANUALE DI RIFERIMENTO HARDWARE 84
Page 85

Riferimento hardware
3.5.5 Contenuto della confezione di TJ1-ML__
Confezione del modulo di interfaccia MECHATROLINK-II:
• Istruzioni di sicurezza.
• TJ1-ML__.
• Etichetta di protezione attaccata alla superficie
superiore del modulo.
3.5.6 Servoazionamenti MECHATROLINK-II serie Sigma-II
I servoazionamenti MECHATROLINK-II sono progettati per eseguire
il controllo della posizione in Trajexia. In ogni ciclo MECHATROLINK-II,
TJ1-MC__ riceve la retroazione della posizione dal servoazionamento
mediante TJ1-ML__. TJ1-MC__ invia al ricettore la posizione
di destinazione, la velocità o la coppia, in base al tipo di asse.
Sono disponibili anche altre funzionalità del servoazionamento
che vengono però aggiornate a velocità più lenta.
TJ1-MC__ considera un servoazionamento come un asse.
Quando si collega un servoazionamento a Trajexia, il parametro
non cambia automaticamente e, in base all'applicazione,
è necessario cambiare manualmente i valori.
Per collegare un servoazionamento Sigma-II a un sistema Trajexia,
è necessario che un'interfaccia JUSP-NS115 MECHATROLINK-II
sia collegata al relativo DPRAM.
Per ulteriori informazioni sui collegamenti di Sigma-II, vedere
il manuale.
Fig. 34
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 85
Page 86

Riferimento hardware
Indicatori LED di NS115
LED Colore Descrizione
Allarme Rosso Acceso: si è verificato un allarme
Spento: nessun allarme attivo
Pronto Verde Acceso: comunicazione attiva
Spento: nessuna comunicazione
in corso
Fig. 35/i
A
B
C
Impostazioni degli indirizzi (SW1 e SW2)
I DIP switch (B) di NS115 consentono di configurare le impostazioni
di comunicazione.
DIP
switch
1 Velocità di
2 Lunghezza
3 Intervallo
4 Manutenzione
Funzione Impostazione Descrizione
on 10 Mbps
trasmissione
on Trasmissione dati a 32 byte
dati
off Indirizzi 40-4F
indirizzi
on Indirizzi 50-5F
off Deve sempre essere impostato su off.
(riservato)
L'impostazione on non è utilizzata.
C
Fig. 36/i
23 4
1
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 86
ON OFF
Page 87

Riferimento hardware
Per assegnare a NS115 l'indirizzo elencato nella tabella riportata di
seguito, impostare il selettore dell'indirizzo (A, figura 35) di NS115
su n (dove n può essere un valore compreso tra 0 e F).
/i
Numero
del selettore
rotativo
1off41 0
2off42 1
3off43 2
4off44 3
5off45 4
6off46 5
7off47 6
8off48 7
9off49 8
Aoff4A 9
Boff4B 10
Coff4C 11
DIP
switch 3
Indirizzo stazione Asse nell'unità
di controllo assi
Fig. 37
Doff4D 12
Eoff4E 13
Foff4F 14
0on50 15
Non utilizzare l'indirizzo 40 e quelli compresi tra 51-5F. Utilizzare
solo gli indirizzi compresi tra 41-50.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 87
Page 88

Riferimento hardware
Connettori per MECHATROLINK (CN1A e CN1B)
Effettuare il collegamento alla rete MECHATROLINK-II come
illustrato nella figura, utilizzando un cavo MECHATROLINK-II
appropriato. I due connettori sono identici, pertanto è possibile
collegare entrambi i cavi a entrambi i connettori. Se il servoazionamento è l'ultimo dispositivo della rete, collegare una resistenza
per terminatore MECHATROLINK-II a uno dei connettori.
Connettore CN4 per encoder completamente chiuso
CN4 consente il collegamento di un encoder completamente
chiuso, ovvero la posizione viene controllata in base a un encoder
esterno, mentre l'anello di velocità e di coppia in base all'encoder
del motore. Viene utilizzato quando si installa il motore in macchine
in cui è necessario effettuare la misurazione direttamente sul carico
per uno dei seguenti motivi:
• Presenza di scorrimento o gioco nella trasmissione meccanica.
• La precisione richiesta è estremamente elevata.
Fig. 38
L'encoder supportato è line driver e il pinout è illustrato nella figura.
Nella tabella riportata di seguito vengono descritti il layout dei
terminali del connettore CN4 e le caratteristiche del connettore.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 88
Page 89

Riferimento hardware
1 PG0V Messa a terra
2 PG0V Messa a terra
3 PG0V Messa a terra
4– –
5– –
6– –
7– –
8– –
9– –
10 – –
11 – –
12 – –
13 – –
14 FC Fase C ingresso +
15 /FC Fase C ingresso –
16 FA Fase A ingresso +
Fig. 39/i
NS115
CN4
1,2,3
16
17
18
19
14
15
PG0V
FA
/FA
FB
/FB
FC
/FC
Alimentazione
esterna
GND
A
/A
B
/B
Z
/Z
PG esterno
17 /FA Fase A ingresso –
18 FB Fase B ingresso +
19 /FB Fase B ingresso –
20 – –
Nota
Verificare che sia utilizzato un cavo schermato e che
la schermatura sia collegata al guscio del connettore.
Revisione 3.0
Parametri del servoazionamento correlati all'utilizzo di Trajexia:
MANUALE DI RIFERIMENTO HARDWARE 89
Page 90

Riferimento hardware
Risoluzione del rapporto di riduzione dell'encoder
Questi due parametri definiscono le unità del sistema
in combinazione con UNITS.
• Pn202: numeratore del rapporto di riduzione. Il valore
predefinito è 4. Impostare il valore 1 per ottenere
la risoluzione massima dell'encoder.
• Pn203: denominatore del rapporto di riduzione.
Il valore predefinito è 1.
Encoder assoluto
• Pn205: numero del limite di multigiro. Il valore predefinito
è 65.535. Impostare un valore che sia appropriato per
la riduzione del rapporto dell'encoder e UNITS.
Encoder completamente chiuso
• Pn002.3: 0 = disattivato, 1 = utilizzo senza Z, 2 = utilizzo con Z,
3 = utilizzo senza rotazione indietro Z, 4 = utilizzo con rotazione
indietro Z.
• Pn206: numero di impulsi dell'encoder completamente chiuso
per giri del motore. Il valore predefinito è 16.384.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 90
Page 91

Riferimento hardware
Utilizzo degli ingressi digitali del servoazionamento
in Trajexia
• Pn511: mapping degli ingressi di registrazione.
• Pn81E: mapping degli ingressi normali.
Per poter leggere tutti gli ingressi del servoazionamento
Trajexia, si consiglia di effettuare le impostazioni elencate
nella tabella riportata di seguito.
/i
Impostazione
parametri
Pn81E = 4.321 CN1-40 DRIVE_INPUTS bit 12
Pn511 = 654X CN1-44 DRIVE_INPUTS bit 06
Per gli altri parametri e collegamenti, vedere il manuale del Sigma-II.
Ingresso
nel Sigma-II
CN1-41 DRIVE_INPUTS bit 13
CN1-42 DRIVE_INPUTS bit 14
CN1-43 DRIVE_INPUTS bit 15
CN1-45 DRIVE_INPUTS bit 07
CN1-46 DRIVE_INPUTS bit 08
Bit nel Trajexia
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 91
Page 92

Riferimento hardware
3.5.7 Servoazionamenti MECHATROLINK-II serie Junma
A un sistema Trajexia è possibile collegare anche
un servoazionamento Junma.
/i
Etichetta Terminale/LED Descrizione
A FIL Selettore rotativo per l'impostazione
del filtro di riferimento
B CN6A e CN6B Connettori bus MECHATROLINK-II
C CN1 Connettore del segnale di I/O
D CN2 Connettore di ingresso dell'encoder
E SW1 Selettore rotativo per le impostazioni
degli indirizzi MECHATROLINK-II
F SW2 DIP switch per le impostazioni della
comunicazione MECHATROLINK-II
G RDY Indicatore di stato del servoazionamento
H ALM Spia di allarme
I COM Indicatore di stato della comunicazione
MECHATROLINK-II
J CNA Connettore per l'alimentazione
K CNB Connettore per il servomotore
Indicatori LED
/i
LED Descrizione
COM Acceso: comunicazione MECHATROLINK-II in corso
Spento: assenza di comunicazione MECHATROLINK-I/II
ALM Acceso: si è verificato un allarme
Spento: assenza di allarme
RDY Acceso: l'alimentazione è attiva e il dispositivo è in attesa
di stabilire la comunicazione
Revisione 3.0
Lampeggiante: servoazionamento in stato ON
Fig. 40
A
B
C
D
J
FIL
CN6
A/B
CN1
CN2
PWR
COM
ALM
RDY
4
5
3
6
2
7
1
8
0
9
F
A
E
B
D
C
L1
L2
U
V
W
K
CNBCNA
4
5
3
6
2
7
1
8
0
9
A
F
ON
B
E
C
D
1
G
H
I
E
F
MANUALE DI RIFERIMENTO HARDWARE 92
Page 93

Riferimento hardware
Impostazioni delle comunicazioni (SW2)
I 4 DIP switch consentono di effettuare le impostazioni delle
comunicazioni.
/i
DIP
switch
1 Riservato ON Deve sempre essere impostato
2 Lunghezza
3 indirizzi
4 Filtro
Funzione Impostazione Descrizione
su ON. L'impostazione OFF non
è utilizzata.
ON 32 byte
dati
OFF Indirizzi 40-4F
Intervallo
impostazione
ON Indirizzi 50-5F
OFF Impostare il filtro mediante
il selettore rotativo FIL.
ON Impostare il filtro con Pn00A.
Fig. 41
1 23 4
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 93
Page 94

Riferimento hardware
Impostazioni degli indirizzi (SW1)
Per assegnare al servoazionamento Junma l'indirizzo di stazione
elencato nella tabella riportata di seguito, impostare il relativo selettore
dell'indirizzo su n (dove n può essere un valore compreso tra 0 e F).
/i
Fig. 42
Numero
del selettore
rotativo
1off41 0
2off42 1
3off43 2
4off44 3
5off45 4
6off46 5
7off47 6
8off48 7
9off49 8
Aoff4A 9
Boff4B 10
Coff4C 11
Doff4D 12
Eoff4E 13
Foff4F 14
0on50 15
DIP
switch 3
Indirizzo stazione Asse nell'unità
di controllo assi
Non utilizzare l'indirizzo 40 e quelli compresi tra 51-5F. Utilizzare
solo gli indirizzi compresi tra 41-50.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 94
Page 95

Riferimento hardware
Connettore del segnale di I/O CN1
Nella tabella riportata di seguito viene descritto il layout dei pin del
connettore del segnale di I/O (CN1).
/i
Pin I/O Codice Nome segnale
1 Ingresso /EXT1 Blocco esterno
2 Ingresso /DEC Decelerazione a zero
3 Ingresso N_OT Marcia indietro inibita
4 Ingresso P_OT Marcia avanti inibita
5 Ingresso +24VIN Alimentazione ingresso esterna
6 Ingresso E-STP Arresto di emergenza
7 Uscita SG-COM Messa a terra dell'uscita
8N/C
9N/C
10 N/C
11 N/ C
12 Uscita ALM Allarme servoazionamento
13 Uscita /BK Freno
14 N/C
Guscio – – FG
Fig. 43
891011121314
1234567
Connettori per MECHATROLINK-II (CN6A e CN6B)
Collegare il servoazionamento Junma alla rete
MECHATROLINK-II utilizzando i connettori CN6 e CN6B.
Per collegare il dispositivo MECHATROLINK-II precedente
o il modulo TJ1-ML__, utilizzare uno dei connettori
MECHATROLINK-II. Utilizzare l'altro connettore
MECHATROLINK-II per effettuare il collegamento
del dispositivo MECHATROLINK-II successivo oppure
del terminatore MECHATROLINK-II.
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 95
Page 96

Riferimento hardware
Connettore di ingresso dell'encoder CN2
Nella tabella riportata di seguito viene descritto il layout dei pin del
connettore del servoazionamento Junma.
/i
Pin Segnale
1PG5V
2PG0V (GND)
3Fase A (+)
4Fase A (–)
5Fase B (+)
6Fase B (–)
7Fase/Z
8Fase U
9Fase V
10 Fase W
Guscio –
Connettore di alimentazione CNA
Nella tabella riportata di seguito viene descritto il layout dei pin del
connettore di alimentazione CNA.
/i
Pin Segnale Nome
1 L1 Terminale di alimentazione
2 L2 Terminale di alimentazione
3 + Terminale di collegamento del modulo
di rigenerazione
4 – Terminale di collegamento del modulo
di rigenerazione
Fig. 44
Fig. 45
97531
46810
A
N
4321
2
1
2
3
4
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 96
Page 97

Riferimento hardware
Connettore del servomotore CNB
Nella tabella riportata di seguito viene descritto il layout dei pin del
connettore del servomotore CNB.
/i
Pin Segnale Nome
1 U Fase U
2 V Fase V
3 W Fase W
4N/C
Fig. 46
1
A
1
N
2
2
34
3
4
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 97
Page 98

Riferimento hardware
3.5.8 Scheda MECHATROLINK-II per inverter V7
Un inverter V7 insieme a un'interfaccia MECHATROLINK-II
consentono di effettuare il controllo di velocità e coppia
(se l'inverter supporta questa funzione) di un motore
a induzione c.a. Il controllo della posizione non
è supportato mediante MECHATROLINK-II.
TJ1-MC__ non considera un inverter come un asse.
La figura mostra l'aspetto esterno dell'unità SI-T/V7.
A. LED
B. Spina modulare (CN10)
C. Connettore opzionale (CN1)
D. Connettore di comunicazione (CN2)
E. DIP switch
F. Selettore rotativo
G. Terminale di terra
H. Connettore di comunicazione (CN2)
Fig. 47
A C
HGF D
B
E
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 98
Page 99

Riferimento hardware
Indicatori LED:
Gli indicatori LED indicano lo stato delle comunicazioni
di MECHATROLINK-II e dell'unità SI-T/V7.
A. Run
B. TX
C. RX
D. ERR
/i
Nome Display Spiegazione
Colore Stato
RUN Verde Acceso Funzionamento normale.
Fig. 48
DBA C
– Spento
ERR Rosso Acceso Errore di timeout di Watchdog, errore nelle
Rosso Lampeg-
giante
– Spento Nessun errore di comunicazione
TX Verde Acceso Invio di dati.
– Spento Invio dei dati interrotto, ripristino dell'hardware.
Revisione 3.0
RX Verde Acceso Ricerca della portante di ricezione.
– Spento Nessuna portante di ricezione trovata, ripristino
Comunicazioni con la CPU interrotte,
reimpostazione dell'hardware, errore nella verifica
della RAM, errore nella verifica della DPRAM,
errore nell'impostazione dell'indirizzo di stazione
o errore nel codice del modello dell'inverter.
comunicazioni o reimpostazione dell'hardware.
Errore nella verifica della ROM (una volta)*,
errore nella verifica della RAM (due volte)*,
errore nella verifica della DPRAM (3 volte)*,
errore dell'autodiagnostica ASIC delle
comunicazioni (4 volte)*, errore nella
verifica della RAM ASIC (5 volte)*, errore
nell'impostazione dell'indirizzo di stazione
(6 volte)*, errore nel codice del modello
dell'inverter (7 volte)*.
*: indica il numero di lampeggiamenti.
o autodiagnostica.
dell'hardware.
MANUALE DI RIFERIMENTO HARDWARE 99
Page 100

Riferimento hardware
DIP switch
Nella tabella riportata di seguito sono elencate le impostazioni del
DIP switch dell'unità SI-T/V7.
Nome Etichetta Stato Funzione
Velocità di
trasmissione
S1-1 on 10 Mbps (MECHATROLINK-II).
Fig. 49/i
Lunghezza
dati
Indirizzo
stazione
Manutenzione S1-4 off Generalmente off
S1-2 on Trasmissione dati a 32 byte
(MECHATROLINK-II).
S1-3 off Imposta su 2 la decima cifra del
numero di stazione. Non valido
se il numero massimo di unità inclusa
S2 del selettore rotativo è 20.
on Imposta su 3 la decima cifra del
numero di stazione. Non valido
se il numero massimo di unità inclusa
S2 del selettore rotativo è 3F.
1
on Non utilizzata.
1. Per la manutenzione. Lasciare sempre questo switch su off.
1234
OFF
Revisione 3.0
MANUALE DI RIFERIMENTO HARDWARE 100
 Loading...
Loading...