


Cat. No.
I50E-IT-03
Controllo assi Trajexia
TJ1-MC04
TJ1-MC16
GUIDA RAPIDA DI UTILIZZO
Sommario
1 Introduzione ..................................................................................................................................................................................................4
1.1 Informazioni sul guida.......................................................................................................................................................................................................................4
1.2 Informazioni generali sul guida .........................................................................................................................................................................................................5
1.3 Elementi necessari ...........................................................................................................................................................................................................................6
2 Dalla confezione alla guida .......................................................................................................................................................................... 7
2.1 Regole di Trajexia.............................................................................................................................................................................................................................7
2.2 Contenuto delle confezioni ...............................................................................................................................................................................................................8
2.3 Installazione di Trajexia ..................................................................................................................................................................................................................10
3 Collegamenti ...............................................................................................................................................................................................13
3.1 Operazioni preliminari.....................................................................................................................................................................................................................13
3.2 Moduli di alimentazione ..................................................................................................................................................................................................................13
3.2.1 Modulo di alimentazione consigliato.................................................................................................................................................................................14
3.2.2 Moduli di alimentazione opzionali.....................................................................................................................................................................................15
3.3 TJ1-MC__ .......................................................................................................................................................................................................................................16
3.4 TJ1-ML__........................................................................................................................................................................................................................................17
3.4.1 Collegamento del modulo di interfaccia MECHATROLINK-II al servoazionamento.........................................................................................................18
3.4.2 Collegamento del servoazionamento monofase da 200 V ...............................................................................................................................................19
3.4.3 Collegamento del servoazionamento trifase da 400 V .....................................................................................................................................................20
3.4.4 Collegamento al NS115....................................................................................................................................................................................................21
3.4.5 Impostazione dei DIP switch e dell'indirizzo dell’NS115...................................................................................................................................................22
3.5 Completamento dell'installazione ...................................................................................................................................................................................................23
4 Trajexia Tools.............................................................................................................................................................................................. 24
4.1 Configurazione minima del PC .......................................................................................................................................................................................................24
4.2 Installazione del software Trajexia Tools........................................................................................................................................................................................24
4.3 Collegamento alla TJ1-MC__ .........................................................................................................................................................................................................29
4.4 Creazione del primo progetto .........................................................................................................................................................................................................34
4.5 Completamento dell'installazione ...................................................................................................................................................................................................42
5 Ulteriori informazioni.................................................................................................................................................................................. 43
5.1 Trajexia ...........................................................................................................................................................................................................................................43
5.2 Caratteristiche distintive di Trajexia ................................................................................................................................................................................................44
5.2.1 Connettività diretta via Ethernet .......................................................................................................................................................................................44
5.2.2 Protezione dei dati dell'utente ..........................................................................................................................................................................................44
5.2.3 Porta seriale e I/O locali ...................................................................................................................................................................................................44
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 2
5.2.4 MECHATROLINK-II..........................................................................................................................................................................................................44
5.2.5 TJ1-FL02 ..........................................................................................................................................................................................................................44
5.2.6 Servoazionamenti e inverter.............................................................................................................................................................................................45
5.2.7 Moduli I/O remoti ..............................................................................................................................................................................................................45
Sommario
5.2.8 PROFIBUS .......................................................................................................................................................................................................................45
5.2.9 DeviceNet .........................................................................................................................................................................................................................45
5.3 Manuali su Trajexia.........................................................................................................................................................................................................................45
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 3
Introduzione
1 Introduzione
Lo scopo della presente Guida rapida di utilizzo è di aiutare gli utenti
ad acquisire familiarità con il Trajexia. Nel manuale viene spiegato
come ottenere il movimento di un singolo asse attraverso il Trajexia
e un servoazionamento Sigma-II tramite MECHATROLINK-II.
Il manuale si rivolge al personale indicato di seguito, che deve avere
conoscenze di sistemi elettrici.
Il tecnico deve operare in sicurezza, rispettando la potenza
(l’alimentazione per Trajexia e per il servoazionamento, può essere
di 380 Vc.a.) e le parti mobili del motore.
Quando Trajexia viene usato in un'applicazione reale, è necessario
seguire le avvertenze e le precauzioni di sicurezza riportate
nel Manuale di riferimento hardware.
Per informazioni dettagliate sul Trajexia, consultare i manuali
elencati nella sezione 5.3.
1.1 Informazioni sul guida
Nel Manuale di avvio rapido viene descritto come collegare
un Trajexia a un servoazionamento Sigma-II tramite
la comunicazione MECHATROLINK-II. Viene illustrata, inoltre,
anche l'installazione del software operativo Trajexia Tools
e viene presentato un programma di esempio che controlla
un servomotore.
Il presente manuale contiene sia procedure che informazioni
descrittive. I passi di una procedura da eseguire sono numerati.
Tutte le altre informazioni sono fornite come testo normale
o in elenchi puntati.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 4
Introduzione
1.2 Informazioni generali sul guida
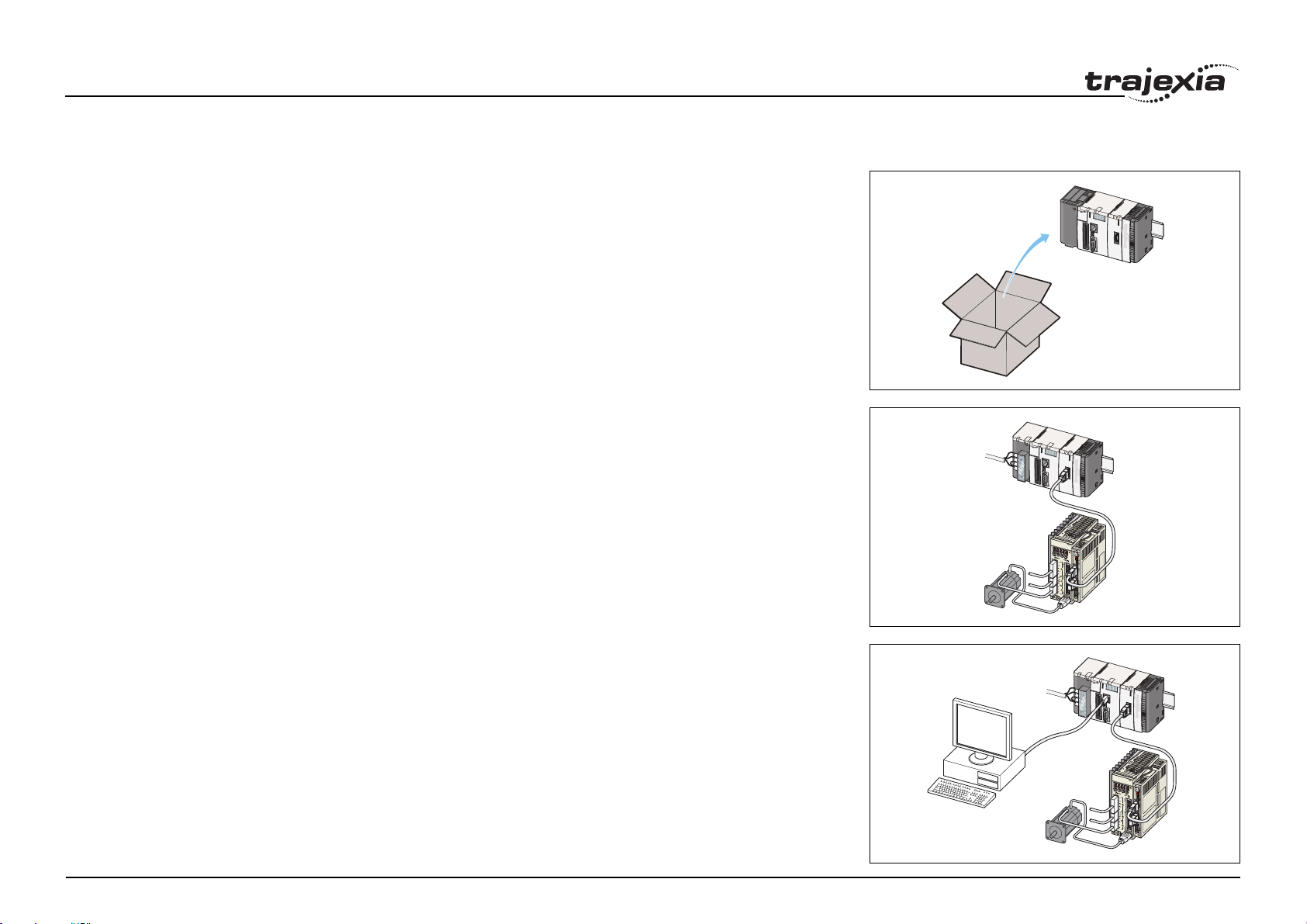
Nel Capitolo 2 viene descritto come disimballare le confezioni
ed installare le unità Trajexia su una guida.
Nel Capitolo 3 viene descritto come collegare un servomotore
al Trajexia.
Fig. 1
Fig. 2
MC16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
C
N1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
M
C
16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
C
N
O
1
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
Nel Capitolo 4 viene descritto come collegare Trajexia a un PC
Fig. 3
e come scrivere un programma di esempio che renda operativo
MC
il servomotore.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 5
16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
CN1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2

Introduzione
1.3 Elementi necessari
Per l'installazione descritta nella presente Guida rapida di utilizzo
sono necessari gli elementi indicati di seguito.
1.3.1 Unità Trajexia
• Modulo di alimentazione, da selezionare tra:
- CJ1W-PA202.
- CJ1W-PA205R.
- CJ1W-PD025.
• Unità di controllo assi TJ1-MC__, da selezionare tra:
-TJ1-MC04.
-TJ1-MC16.
• Modulo master TJ1-ML__ (modulo master MECHATROLINK-II),
da selezionare tra:
- TJ1-ML04.
- TJ1-ML16.
• Terminatore TJ1-TER, fornito con l'unità TJ1-MC__.
1.3.2 Altri moduli
• Modulo di interfaccia MECHATROLINK-II (NS115).
• Cavo per MECHATROLINK-II.
• Terminatore per MECHATROLINK-II.
• Servoazionamento monofase da 200 V o trifase da 400 V.
•Servomotore.
•PC.
• CD-ROM del software Trajexia Tools.
• Cavo di potenza e cavo encoder dal servoazionamento
al motore.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 6
Dalla confezione alla guida
2 Dalla confezione alla guida
In questo capitolo vengono descritte le azioni necessarie
per collegare le unità a una guida DIN.
2.1 Regole di Trajexia
Prima di collegare le unità tra loro, è opportuno verificare
le seguenti regole per il collegamento:
• La prima unità a sinistra è il Modulo di alimentazione.
• Occorre collegare un'unità TJ1-MC__ al Modulo
di alimentazione.
• All'unità TJ1-MC__ si possono collegare fino a sette unità
più un modulo TJ1-TER.
• L'ultima unità deve essere un modulo TJ1-TER.
• È possibile installare fino a quattro moduli TJ1-ML__ nel
sistema.
• Con l'unità TJ1-MC16 è possibile installare fino a sette TJ1FL02 (modulo Flexible Axis) nel sistema. Con l'unità TJ1-MC04
è possibile installare fino a tre TJ1-FL02 nel sistema.
• È possibile installare nel sistema un TJ1-PRT (modulo slave
PROFIBUS-DP) o un TJ1-DRT (modulo slave DeviceNet).
• Tra l'unità TJ1-MC__ e il TJ1-TER le unità possono essere
installate in qualsiasi ordine.
Non modificare le posizioni delle unità dopo avere scritto
i programmi, altrimenti i programmi potrebbero non essere
più validi.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 7
Dalla confezione alla guida
2.2 Contenuto delle confezioni
In questa sezione sono elencate le unità Trajexia necessarie
per l'installazione.
2.2.1 Modulo di alimentazione
La scatola del Modulo di alimentazione contiene:
• Istruzioni di sicurezza.
• Modulo di alimentazione.
• Etichetta di protezione attaccata alla superficie superiore
dell'unità.
2.2.2 TJ1-MC__
La scatola dell'unità TJ1-MC__ contiene:
• Istruzioni di sicurezza.
•TJ1-MC__
• Etichetta di protezione attaccata alla superficie superiore
della TJ1-MC__.
• TJ1-TER, collegato alla TJ1-MC__.
• Parti per un connettore seriale.
• Parti per un connettore di I/O.
• Due fermi metallici per la guida DIN per evitare che il Trajexia
esca dalla guida.
• Clip bianca per sostituire la clip gialla del Modulo
di alimentazione.
2.2.3 TJ1-ML__
La scatola del modulo TJ1-ML__ contiene:
• Istruzioni di sicurezza.
• TJ1-ML__
• Etichetta di protezione attaccata alla superficie superiore
Revisione 3.0
del modulo.
GUIDA RAPIDA DI UTILIZZO 8
Dalla confezione alla guida
2.2.4 Software
La scatola del software contiene:
• CD-ROM Trajexia Tools.
• Etichetta con il numero di licenza del software, attaccata sulla
custodia del CD.
• Scheda con il modulo di registrazione della garanzia.
• Etichette per l'indirizzo.
• Busta per la licenza.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 9
Dalla confezione alla guida
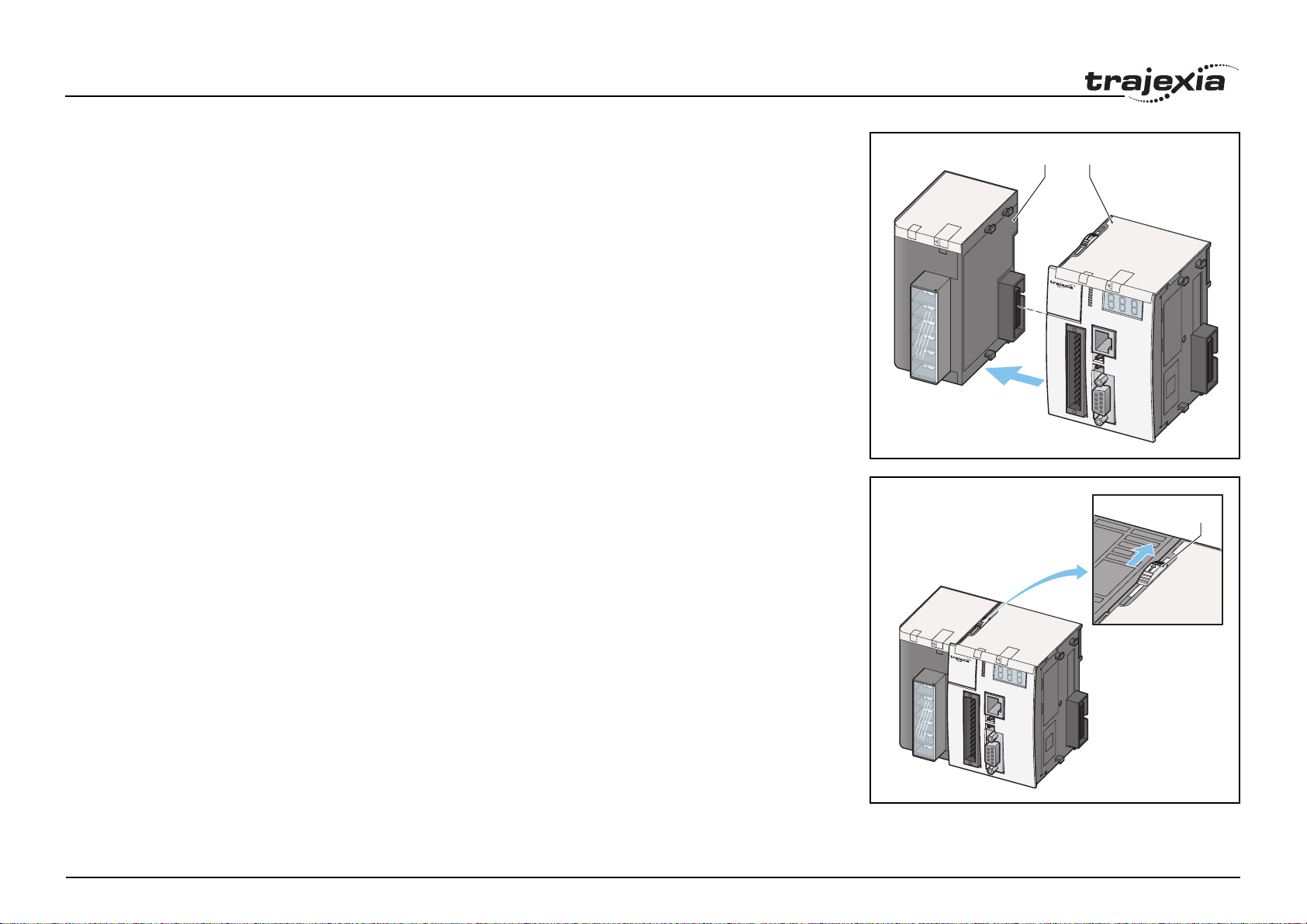
2.3 Installazione di Trajexia
1. Estrarre tutte le unità dalla confezione. Controllare che le unità
siano complete.
2. Non rimuovere le etichette di protezione dalle unità.
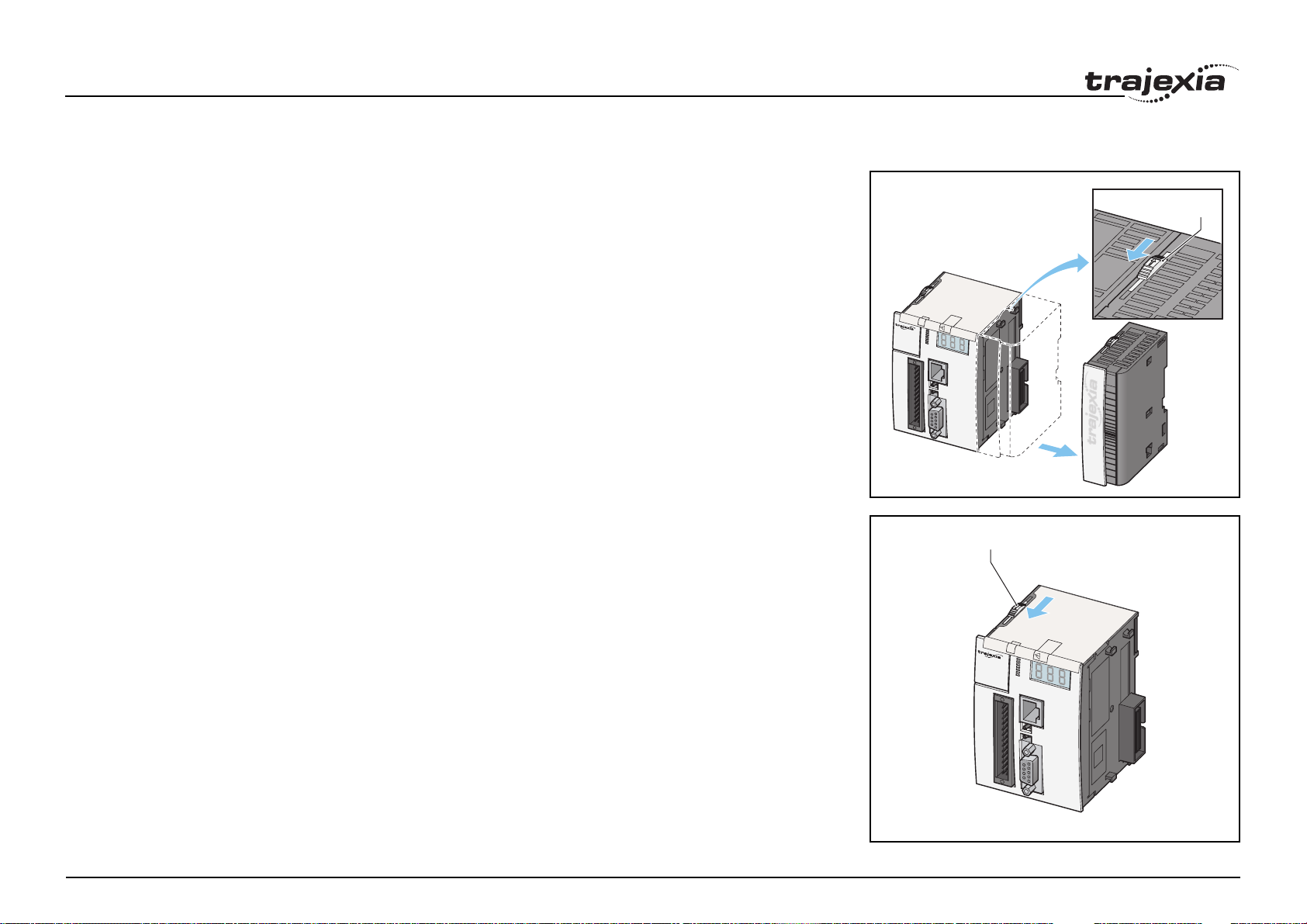
3. Per scollegare TJ1-MC dal TJ1-TER, spingere in avanti le clip
(A) situate sul lato superiore e inferiore del TJ1-TER.
4. Scollegare il TJ1-TER dalla TJ1-MC__.
5. Spingere in avanti le clip (A) situate sul lato superiore e inferiore
di tutte le unità.
Fig. 1
Fig. 2
A
MC16
0
O
1
M
R
O
N
2
M
O
TIO
N
3
C
O
N
T
R
O
4
L
L
E
R
5
6
7
C
N
3
C
N
1
T
E
R
M
O
N
/O
F
F
W
IR
E
2
/4
C
N
2
A
MC16
0
OMRON
1
2
MOTION CONTROLLER
3
4
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 10
Dalla confezione alla guida
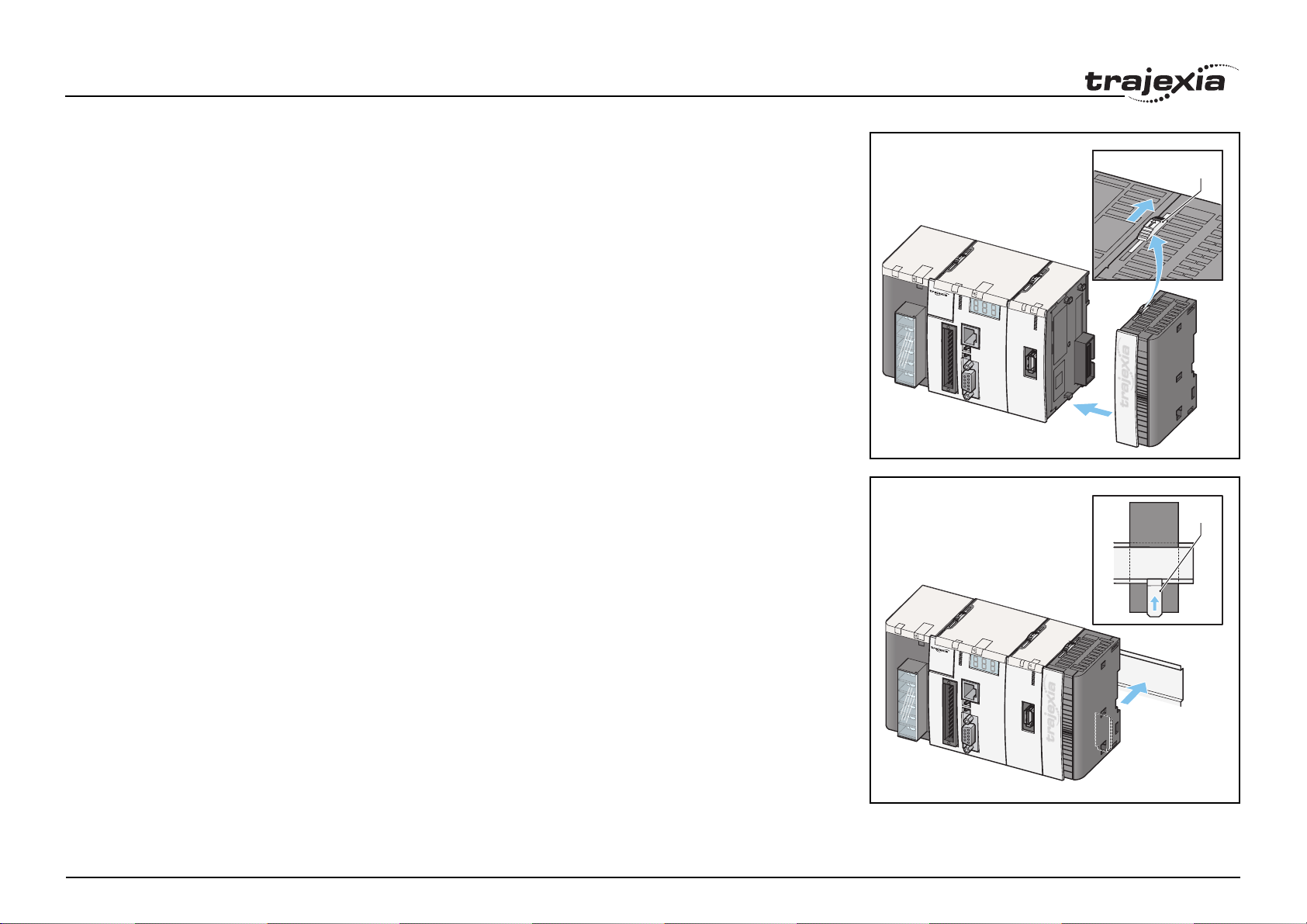
6. Collegare l'unità TJ1-MC__ (C) al Modulo di alimentazione (B).
7. Spingere verso il retro le clip (A) situate sul lato superiore
einferiore.
Fig. 3
Fig. 4
MC16
OMRON
MOTION CONTROLL
CB
0
1
2
3
4
ER
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
A
MC16
0
OMRON
1
2
MOTION CON
3
TROLLER
4
5
6
7
C
N3
CN
1
TER
M
O
N
/OFF
W
IRE
2/4
CN2
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 11
Dalla confezione alla guida
8. Ripetere i due passi precedenti per tutte le unità.
9. Accertarsi che l'ultima unità sia TJ1-TER.
10. Tirare verso il basso tutte le clip (D) su tutte le unità.
11. Collegare Trajexia alla guida DIN.
12. Tirare verso l'alto tutte le clip (D) su tutte le unità.
Fig. 5
Fig. 6
MC16
O
M
R
O
MOTION CONTROLLER
A
0
1
N
2
3
4
M
L
5
6
7
CN3
1
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
D
MC16
0
O
1
M
RO
N
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
C
N
3
ML16
5
6
7
C
N
1
T
E
R
M
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
R
U
N
8
F
C
N
1
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 12

Collegamenti
3 Collegamenti
In questo capitolo vengono descritti i collegamenti delle unità Trajexia.
3.1 Operazioni preliminari
In questo ambiente non sono installati gli arresti di emergenza,
i circuiti di interblocco e i finecorsa.
Attenzione
Il tecnico elettricista deve operare in sicurezza,
rispettando la potenza (alimentazione per Trajexia
e per il servoazionamento, che può essere di 380 Vc.a.)
e le parti mobili del motore.
3.2 Moduli di alimentazione
È possibile utilizzare tre diversi tipi di moduli di alimentazione:
/i
Modulo
di alimentazione
CJ1W-PA202 C.A. 110 – 240 V 85 – 264 V 47 – 63 Hz 14 W
CJ1W-PA205R C.A. 110 – 240 V 85 – 264 V 47 – 63 Hz 25 W
CJ1W-PD025 C.C. 24 V 21,6 – 26,4 V N/A 25 W
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 13
Corente Tensione
di ingresso
Limiti
tensione
di funzionamento
Limiti
frequenza
di funzionamento
Potenza
in uscita
Collegamenti
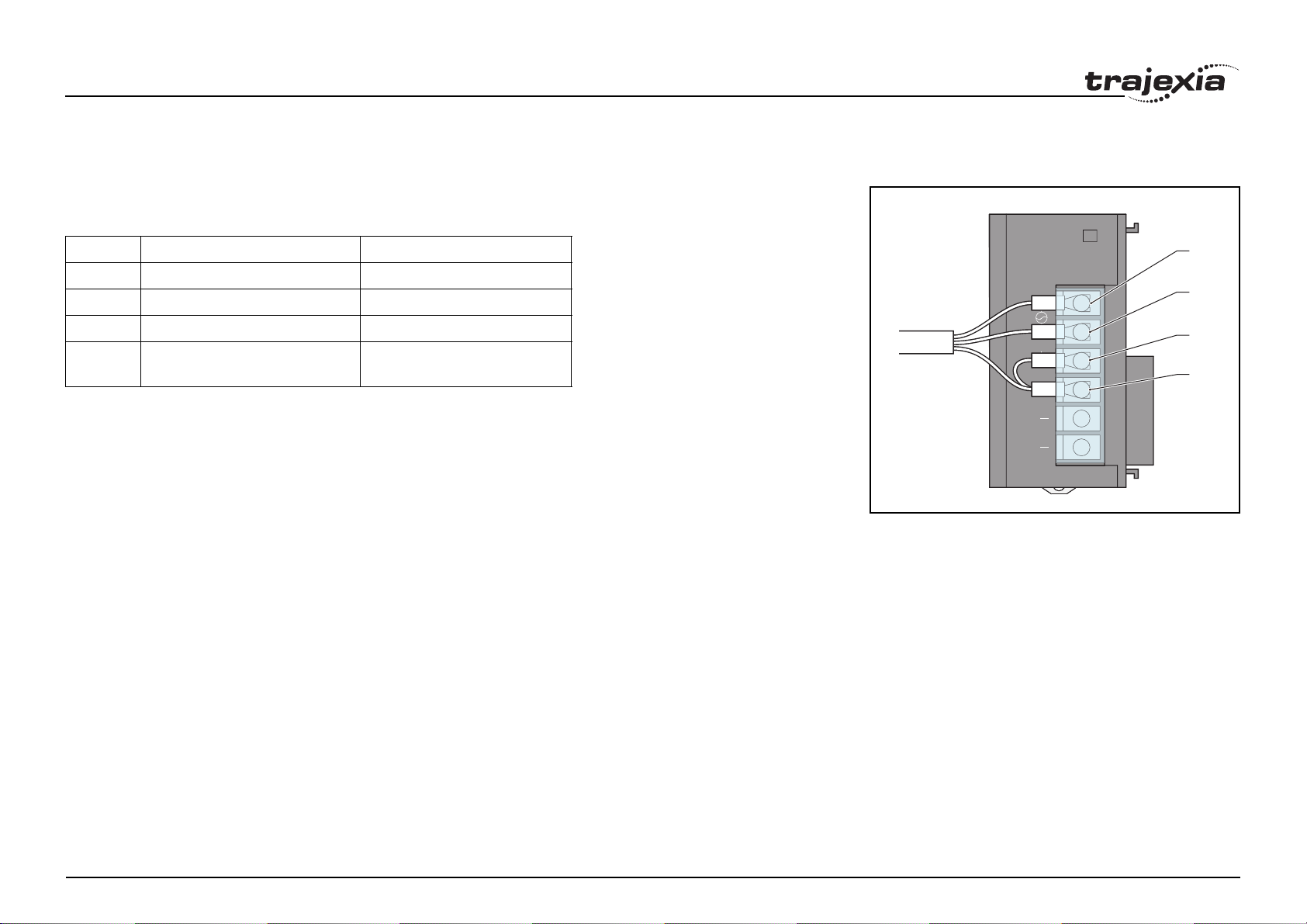
3.2.1 Modulo di alimentazione consigliato
Il Modulo di alimentazione consigliato è CJ1W-PA202.
1. Collegare il Modulo di alimentazione CJ1W-PA202 nel modo
seguente:
/i
Terminale Descrizione Collegamento
A Alimentazione a 110 – 240 V Vc.a. diretta
B Alimentazione a 110 – 240 V Vc.a. diretta
C Linea di messa a terra Cortocircuito al terminale D
D Messa a terra • Cortocircuito al terminale C
• Messa a terra
Fig. 1
PA2 02
AC100
-240V
INPUT
L2/N
POWER
A
L1
B
C
D
NC
NC
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 14
Collegamenti
A
V
O
T
RUN
INPUT
V
L2/N
UT
C
C
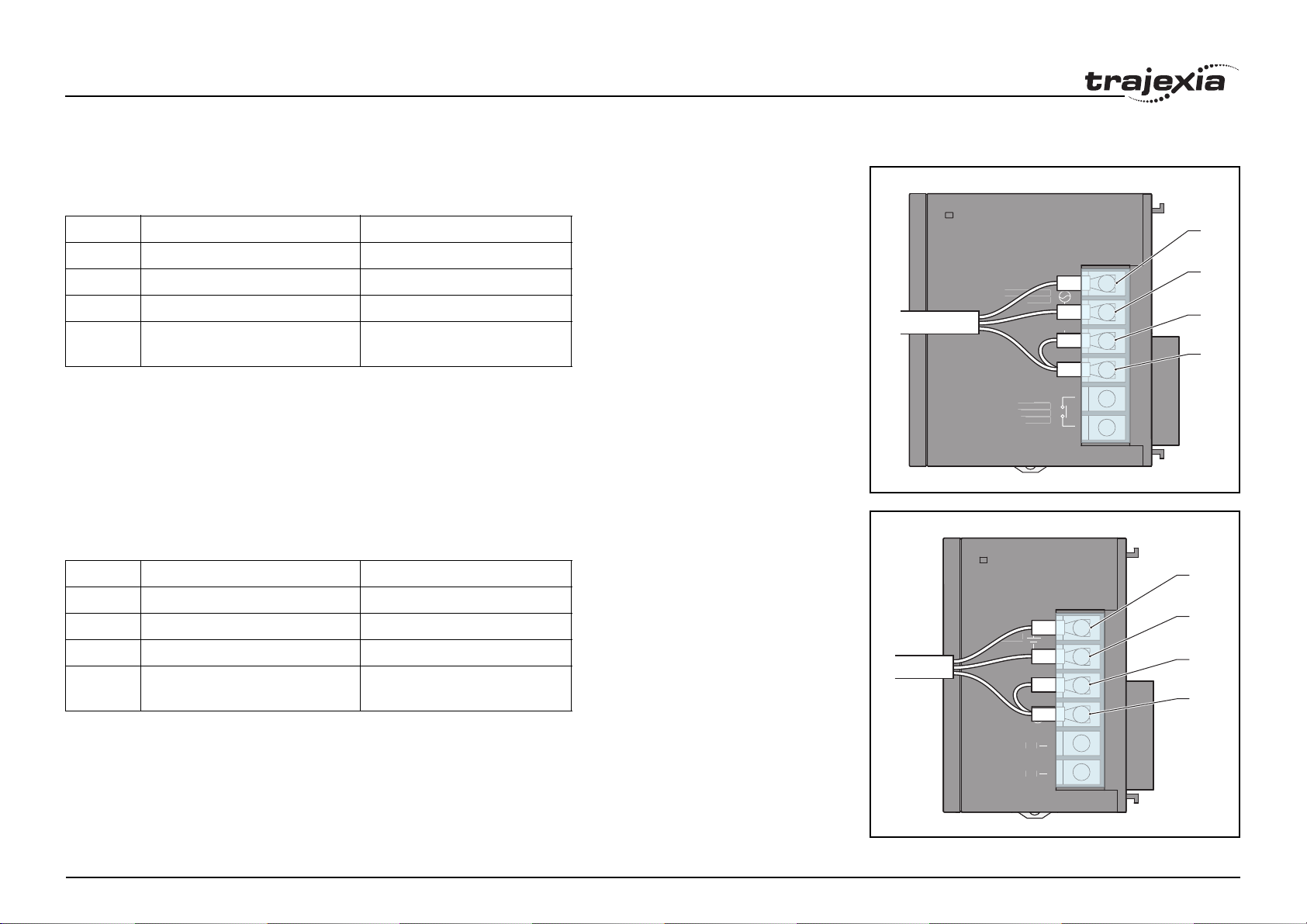
3.2.2 Moduli di alimentazione opzionali
1. Collegare il Modulo di alimentazione CJ1W-PA205R nel modo
seguente:
/i
Terminale Descrizione Collegamento
A Alimentazione a 110 – 240 V Vc.a. diretta
B Alimentazione a 110 – 240 V Vc.a. diretta
C Linea di messa a terra Cortocircuito al terminale D
D Messa a terra • Cortocircuito al terminale C
• Messa a terra
1. Collegare il Modulo di alimentazione CJ1W-PD025 nel modo
seguente:
/i
Terminale Descrizione Collegamento
A Alimentazione 24 V 24 Vc.c.
B Alimentazione 0 V 0 V
C Linea di messa a terra Cortocircuito al terminale D
D Messa a terra • Cortocircuito al terminale C
• Messa a terra
Fig. 2
Fig. 3
PA2 05 R
POWER
PD025
PD025
POWER
POWER
INP
AC100-240
UTPU
C240
DC24V
A
B
C
D
A
B
C
D
N
N
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 15

Collegamenti
3.3 TJ1-MC__
3.3.1 Porta Ethernet
Quando si accende l'alimentazione di Trajexia, il display a LED
a tre cifre (A) indica l'indirizzo IP e la Subnet Mask dell'unità
TJ1-MC__.
Usare la porta Ethernet (B) per collegare l'unità TJ1-MC__
a un PC. Si può utilizzare sia un cavo dritto che un cavo incrociato
Ethernet. Se si collega il PC direttamente alla TJ1-MC__, e non
tramite hub o altro dispositivo di rete, il PC deve avere un indirizzo
IP fisso.
La TJ1-MC__ rileva automaticamente quando si inserisce
un cavo Ethernet nella porta Ethernet. Quando si inserisce
un cavo Ethernet nella porta Ethernet, il display a LED (A)
visualizza l'indirizzo IP della TJ1-MC__.
3.3.2 Porta seriale
La porta seriale (D) viene usata per collegare la TJ1-MC__
a un dispositivo che necessita di una connessione seriale Viene
descritta nel Manuale di riferimento hardware. Non è necessario
usare questa porta nell'installazione di esempio.
3.3.3 Porta di I/O a 28 pin
Fig. 4
A
B
C
D
La porta di I/O a 28 pin (C) contiene 16 ingressi digitali e 8 uscite
digitali Viene descritta nel Manuale di riferimento hardware.
Non è necessario usare questa porta nell'installazione di esempio.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 16

Collegamenti
3.4 TJ1-ML__
Il modulo TJ1-ML__ è il modulo master di rete MECHATROLINK-II.
I dispositivi MECHATROLINK-II possono essere servoazionamenti,
I/O o inverter. I/O e inverter sono descritti nel Manuale
di riferimento hardware.
Il modulo master TJ1-ML__ ha una porta (A) per il collegamento
al primo dispositivo MECHATROLINK-II.
Fig. 5
ML16
RUN
8F
CN1
A
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 17

Collegamenti
3.4.1 Collegamento del modulo di interfaccia
MECHATROLINK-II al servoazionamento
Si può usare un servoazionamento monofase da 200 V
(vedere pagina 19) o trifase da 400 V (vedere pagina 20).
1. Inserire i fermi (A) del modulo di interfaccia MECHATROLINK-II
(NS115) nelle aperture (B) del servoazionamento.
2. Verificare che la porta (C) del servoazionamento
sia posizionata di fronte allo slot del NS115.
3. Inserire il fermo (D) del NS115 nell'apertura (E)
del servoazionamento.
4. Collegare il cavo di messa a terra (F) del NS115 al punto
contrassegnato con G (G) sul servoazionamento.
Fig. 6
Fig. 7
C
G
B
E
D
A
F
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 18

Collegamenti
3.4.2 Collegamento del servoazionamento monofase
da 200 V
1. I terminali nel gruppo A sono dedicati all'ingresso
dell'alimentazione sul circuito principale utilizzato per generare
l'uscita di corrente al motore (gruppo C). Collegare i terminali
nel modo seguente:
/i
Terminale Descrizione Collegamento
D, E Alimentazione a 200 – 230 V Vc.a. diretta
F Bus 1 in c.c. Cortocircuito al terminale G
G Bus 2 in c.c. Cortocircuito al terminale F
2. I terminali nel gruppo B sono dedicati all'ingresso
di alimentazione del circuito di controllo. Collegare i terminali
nel modo seguente:
/i
Terminale Descrizione Collegamento
H Alimentazione di controllo a 200 – 230 V Vc.a. diretta
I Alimentazione di controllo a 200 – 230 V Vc.a. diretta
3. I terminali nel gruppo C sono i terminali per l'uscita
dell'alimentazione del motore. Collegare i terminali nel modo
seguente:
/i
Fig. 8
G
D
E
F
H
I
L1
L2
L1C
L2C
B1
B2
1
2
200V
MODE/SET
A
B
C
CHARGE
DATA/
POWER
C
L1
N
3
L2
1
2
C
N
1
L1C
L2C
B1
B2
U
v
C
N
w
2
J
Terminale Descrizione Collegamento
U Motore fase U Il terminale U sul motore
V Motore fase V Il terminale V sul motore
W Motore fase W Il terminale W sul motore
4. Collegare la porta di ingresso dell'encoder (J) al cavo
Revisione 3.0
U
V
W
U
V
W
per encoder del servomotore.
GUIDA RAPIDA DI UTILIZZO 19

Collegamenti
3.4.3 Collegamento del servoazionamento trifase da 400 V
1. I terminali nel gruppo A sono dedicati all'ingresso di alimentazione del circuito principale utilizzato per generare l'uscita di
corrente al motore (gruppo C). Collegare i terminali nel modo
seguente:
/i
Terminale Descrizione Collegamento
D, E, F Alimentazione trifase da 400 V Vc.a. diretta
G Bus 1 in c.c. Cortocircuito al terminale H
H Bus 2 in c.c. Cortocircuito al terminale G
2. I terminali nel gruppo B sono dedicati all'ingresso di alimentazione del circuito di controllo. Collegare i terminali nel modo
seguente:
/i
Terminale Descrizione Collegamento
I Alimentazione di controllo 24 Vc.c.
J Alimentazione di controllo 0 Vc.c.
K Comune per resistenza di rigenerazione Cortocircuito al terminale L
L Resistenza di rigenerazione interna Cortocircuito al terminale K
1. Se viene utilizzata la resistenza interna.
3. I terminali nel gruppo C sono i terminali per l'uscita dell'alimentazione del motore. Collegare i terminali nel modo seguente:
/i
Terminale Descrizione Collegamento
U Motore fase U Il terminale U sul motore
V Motore fase V Il terminale V sul motore
W Motore fase W Il terminale W sul motore
Revisione 3.0
Fig. 9
D
E
F
G
H
I
J
K
L
1
L1
L2
L3
L1C
L2C
B1
B2
B3
1
2
MODE/SET
CHARGE
A
B
C
400V
DATA/
POWER
C
L1
N
3
L2
L3
1
2
C
N
1
L1C
L2C
B1
B2
B3
U
v
C
N
w
2
M
U
V
W
U
V
W
4. Collegare la porta di ingresso dell'encoder (M) al cavo
per encoder del servomotore.
GUIDA RAPIDA DI UTILIZZO 20

Collegamenti
3.4.4 Collegamento al NS115
Il modulo NS115 è dotato di un DIP switch, di selezione
dell’indirizzo e di due porte MECHATROLINK-II.
/i
Porta o switch Descrizione
A Selettore di indirizzo
B DIP switch
C Porte MECHATROLINK-II
1. Collegare un cavo MECHATROLINK-II (E) al modulo
TJ1-ML__ (D) e a una delle porte dell’NS115.
2. Collegare un terminatore MECHATROLINK-II (F) all'altra porta
dell’NS115.
Fig. 10
A
B
C
C
Fig. 11
D E
Revisione 3.0
F
GUIDA RAPIDA DI UTILIZZO 21

Collegamenti
3.4.5 Impostazione dei DIP switch e dell'indirizzo
dell’NS115.
I DIP switch sull’NS115 vengono usati per configurarne
le impostazioni di comunicazione.
1. Impostare i DIP switch nel modo seguente:
/i
DIP
switch
1 Velocità di
2 Lunghezza
3 Intervallo
4 Manutenzione
Funzione Impo-
stazione
ON 10 Mbps
trasmissione
ON Trasmissione dati a 32 byte
dati
OFF Indirizzi 40-4F
indirizzi
OFF Deve sempre essere impostato su OFF.
(riservata)
Descrizione
ON non è usato
2. Impostare su 1 il selettore di indirizzo del NS115,
per assegnare l'indirizzo logico 41 al servoazionamento.
Fig. 12
23 4
1
ON OFF
Fig. 13
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 22

Collegamenti
3.5 Completamento dell'installazione
L'installazione completa descritta in questo esempio comprende
un Modulo di alimentazione (A), un'unità TJ1-MC__ (B), un modulo
TJ1-ML__ (C), un servoazionamento (D), un modulo NS115 (E),
un motore (F) e un terminale TJ1-TER (G).
Ora è possibile rimuovere le etichette di protezione dalle unità.
Fig. 14
M
C
1
6
O
M
R
O
N
MOTION CONTROLLER
G
C
B
A
0
1
2
3
4
M
L
16
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
R
U
N
8
F
C
N
1
F
D
E
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 23

Trajexia Tools
4 Trajexia Tools
4.1 Configurazione minima del PC
Per installare Trajexia Tools è necessario disporre di un PC
con la seguente configurazione minima:
• Windows 98 SE.
• CPU Pentium da 300 MHz.
• 64 MB di RAM.
• 140 MB di spazio disponibile su disco rigido.
• Una porta Ethernet.
• Se il sistema operativo in uso è Windows 98 SE o Windows ME:
Internet Explorer 5.0.
• Se il sistema operativo in uso è Windows 2000 o Windows XP:
Internet Explorer 6.0.
4.2 Installazione del software Trajexia Tools
1. Inserire il CD-ROM di Trajexia Tools nell'unità CD-ROM del PC.
2. Il programma di installazione di Trajexia Tools si avvia
automaticamente.
3. Se il programma di installazione di Trajexia Tools non si avvia
automaticamente, avviarlo manualmente: eseguire setup.exe
nella directory principale del CD.
4. Selezionare la lingua da utilizzare. Fare clic su OK.
Fig. 1
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 24

Trajexia Tools
5. Viene aperta la finestra di installazione di Trajexia Tools.
Fare clic su Next (Avanti).
6. Fare clic su Yes (Sì) per accettare l'accordo di licenza
e proseguire.
Fig. 2
Fig. 3
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 25

Trajexia Tools
7. Digitare il proprio nome nel campo Name (Nome).
8. Digitare il nome dell'azienda nel campo Company (Società).
9. Digitare il numero di licenza nei campi Licence (Licenza).
Il numero di licenza è riportato sull'etichetta attaccata sulla
custodia del CD di Trajexia Tools.
10. Fare clic su Next (Avanti).
11. Fare clic su Yes (Sì).
Fig. 4
Fig. 5
12. Fare clic su Next (Avanti).
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 26
Fig. 6

Trajexia Tools
13. Fare clic su Next (Avanti).
14. Fare clic su Next (Avanti).
Fig. 7
Fig. 8
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 27

Trajexia Tools
15. Fare clic su Next (Avanti).
16. Il programma di installazione di Trajexia Tools copia i file sul
PC. Questa operazione può durare alcuni minuti.
17. Fare clic su Finish (Fine). Verrà mostrata la finestra del file
Readme di CX-Drive. Chiudere la finestra.
Fig. 9
Fig. 10
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 28

Trajexia Tools
4.3 Collegamento alla TJ1-MC__
È necessario un cavo dritto o incrociato Ethernet per collegare
il PC all'unità TJ1-MC__.
1. Collegare Trajexia all'alimentazione principale.
2. L'indirizzo IP e la Subnet Mask dell'unità TJ1-MC__ sono
visualizzati tre volte sul display a LED (A). L'indirizzo IP
predefinito della TJ1-MC__ è 192.168.0.250, mentre la Subnet
Mask predefinita è 255.255.255.0.
3. Per visualizzare di nuovo l'indirizzo IP e la Subnet Mask
dell'unità TJ1-MC__, spegnere e riaccendere il Trajexia.
4. Collegare il cavo Ethernet alla porta Ethernet del PC.
5. Collegare il cavo Ethernet alla porta Ethernet della TJ1-MC__.
L'indirizzo IP dell'unità TJ1-MC__ viene visualizzato quattro
volte sul display a LED.
Fig. 11
A
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 29

Trajexia Tools
6. Avviare il programma Trajexia Tools sul PC. Nel menu Start
(Awio) di Windows, selezionare:
- Programmi
-OMRON
- Trajexia Tools
- Trajexia Tools
7. Viene aperta la schermata iniziale Motion Perfect 2.
Attendere finché compare il pulsante Cancel (Annulla),
quindi fare clic su Cancel (Annulla).
8. Selezionare il menu:
- Options (Opzioni)
- Communications (Comunicazioni)
Fig. 12
Fig. 13
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 30

Trajexia Tools
9. Controllare che nell'elenco sia selezionato ENet0.
10. Fare clic su Configure (Configura).
11. Digitare 192.168.0.250 nel campo Server name/IP address
(Nome server/Indirizzo IP).
12. Fare clic su OK.
13. Fare clic su OK.
Fig. 14
Fig. 15
Fig. 16
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 31

Trajexia Tools
14. Aprire sul PC il Pannello di controllo di Windows.
15. Fare doppio clic sull'icona Connessioni di rete.
16. Fare clic con il pulsante destro del mouse sull'icona
Connessione alla rete locale (LAN). Fare clic sul menu
Proprietà.
17. Fare clic sulla scheda Generale.
18. Nell'elenco, selezionare Protocollo Internet (TCP/IP).
19. Fare clic su Proprietà.
Fig. 17
Fig. 18
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 32

Trajexia Tools
20. Fare clic sulla scheda Generale.
21. Selezionare Utilizza il seguente indirizzo IP.
22. Digitare l'indirizzo 192.168.0.251 nel campo Indirizzo IP.
23. Digitare 255.255.255.0 nel campo Subnet mask.
24. Fare clic su OK.
25. Fare clic su OK.
26. Chiudere la schermata Connessioni di rete.
Fig. 19
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 33

Trajexia Tools
4.4 Creazione del primo progetto
1. Disattivare l'alimentazione del Trajexia, del servoazionamento
e del modulo NS115.
2. Attivare l'alimentazione del servoazionamento e dell’NS115.
3. Attivare l'alimentazione del Trajexia.
4. Passare al programma Motion Perfect 2 sul PC.
5. Selezionare il menu:
- Controller (Controllore)
- Connect (Connessione)
Fig. 20
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 34

Trajexia Tools
6. Attendere finché compare il pulsante OK, quindi fare clic
su OK.
7. Fare clic su New (Nuovo).
Fig. 21
Fig. 22
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 35

Trajexia Tools
8. Fare clic su Yes (Sì).
9. Individuare la directory in cui si desidera salvare il nuovo
progetto nella struttura Disk directory (Directory del disco).
10. Nel campo Project name (Nome progetto) digitare un nome
per il nuovo progetto.
11. Fare clic su Create (Crea)
Fig. 23
Fig. 24
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 36

Trajexia Tools
12. Fare clic su OK.
13. Nella barra degli strumenti, fare clic sul pulsante Intelligent
drives (Unità intelligenti) (A).
Fig. 25
Fig. 26
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 37

Trajexia Tools
14. Fare clic sul pulsante Config (Configura).
15. Attendere finché si apre la finestra MECHATROLINK Drive
SGDH-01AE-OY.
16. Fare clic sulla scheda Configuration (Configurazione).
Fig. 27
Fig. 28
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 38

Trajexia Tools
17. Scorrere nell'elenco fino alla riga in cui il valore della colonna
Index (Indice) è Pn50A.3.
18. Nella riga, fare clic sulla voce nella colonna Value (Valore).
Viene visualizzato un elenco a discesa.
19. Nell'elenco, selezionare il valore 8:Sets signal OFF.
(8:Imposta il segnale su OFF.).
20. Premere il tasto Invio. Ora l'icona nella prima colonna
è di colore rosso, ad indicare che sono state modificate
le impostazioni di questa riga.
21. Scorrere nell'elenco fino alla riga in cui il valore della colonna
Index (Indice) è Pn50B.0.
22. Nella riga, fare clic sulla voce nella colonna Value (Valore).
Viene visualizzato un elenco a discesa.
23. Nell'elenco, selezionare il valore 8:Sets signal OFF.
(8:Imposta il segnale su OFF.).
24. Premere il tasto Invio. Ora l'icona nella prima colonna
è di colore rosso, ad indicare che sono state modificate
le impostazioni in questa riga.
25. Fare clic sul pulsante Download to Drive (Scarica su unità) (A).
26. Fare clic su Close (Chiudi).
Fig. 29
Fig. 30
A
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 39

Trajexia Tools
27. Fare clic su Close (Chiudi).
28. Fare clic su Yes (Sì).
Fig. 31
29. Disattivare l'alimentazione del Trajexia e del servoazionamento
per rendere effettive le impostazioni del driver.
30. Attivare l'alimentazione del servoazionamento e dell’NS115.
31. Attivare l'alimentazione di Trajexia.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 40

Trajexia Tools
32. Selezionare il menu:
- Program (Programma)
- New (Nuovo)
33. Nel campo Enter new program name (Inserire nome del
nuovo programma), digitare un nome per il nuovo programma.
34. Fare clic su OK.
Fig. 32
Fig. 33
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 41

Trajexia Tools
35. Selezionare la finestra Edit (Modifica).
36. Digitare nella finestra il seguente programma di esempio:
BASE(0)
SERVO=ON
WDOG=ON
loop:
MOVE(10000)
WAIT IDLE
WA(1000)
GOTO loop
37. Nella barra degli strumenti, fare clic sul pulsante Run (Esegui) (A).
Nota:
I parametri predefiniti sono idonei per l'uso con encoder
a 13 bit. Se il programma dell'esempio non funziona,
procedere nel modo seguente:
38. Per informazioni sul tipo di encoder, controllare le specifiche del
motore e il relativo manuale.
39. Se il motore ha una risoluzione più alta, diminuire il valore del
parametro P_GAIN e aumentare i valori dei parametri SPEED,
ACCEL e DECEL. Consultare il Manuale di programmazione.
40. Eseguire di nuovo il programma di esempio.
Fig. 34
4.5 Completamento dell'installazione
Complimenti! La procedura descritta nel presente manuale
è stata completata correttamente. Ora si dispone di un Modulo
di alimentazione, di un'unità TJ1-MC__, di un modulo TJ1-ML__
collegato a un servomotore e di un programma di esempio per
controllare il servomotore.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 42

Ulteriori informazioni
5 Ulteriori informazioni
5.1 Trajexia
Trajexia è la piattaforma di controllo assi di OMRON che offre
le prestazioni e la facilità d'uso di un sistema dedicato.
Trajexia è un sistema modulare stand alone dotato della massima
flessibilità e scalabilità. L'elemento propulsivo di Trajexia
è il coordinatore di movimento multitasking TJ1. Grazie a un DSP
a 32 bit, è in grado di eseguire task come camma elettronica,
sincronizzazione, controllo di registrazione e interpolazione usando
semplici comandi di movimento.
Trajexia offre un controllo per un massimo di 16 assi su un
bus MECHATROLINK-II o un controllo tradizionale analogico
o a impulsi, con un controllo di posizione, velocità e coppia
indipendente per ogni asse. Inoltre, l'esauriente serie di istruzioni
sul movimento rende la programmazione semplice e intuitiva.
È possibile scegliere tra una vasta gamma di inverter
e servoazionamenti, lineari e rotativi tra i migliori del mondo.
Il sistema è scalabile fino a un massimo di 16 assi e 8 inverter
e moduli I/O.
HMI serie NS
I/O digitale
Hostlink
MECHATROLINK-II
Fig. 1
PLC della serie CJ Trajexia Tools
CX-one
Ethernet
Master
PROFIBUS-DP
Master
DEVICENET
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 43

Ulteriori informazioni
5.2 Caratteristiche distintive di Trajexia
5.2.1 Connettività diretta via Ethernet
La porta Ethernet incorporata di Trajexia fornisce una connettività
diretta e rapida per PC, PLC, HMI e altri dispositivi, fornendo
al tempo stesso un accesso completo ai servoazionamenti tramite
bus MECHATROLINK-II. Consente lo scambio di messaggi espliciti
tramite Ethernet e attraverso MECHATROLINK-II, offrendo totale
trasparenza fino all’attuatore e rendendo possibile l'accesso
remoto.
5.2.2 Protezione dei dati dell'utente
Il metodo di cifratura di Trajexia garantisce la completa protezione
e riservatezza del prezioso know-how dell'utente.
5.2.3 Porta seriale e I/O locali
Una porta seriale fornisce una connettività diretta con qualsiasi
OMRON PLC, HMI o altro dispositivo sul campo. I 16 ingressi
e le 8 uscite di I/O dell'unità di controllo assi, integrati e liberamente
configurabili, consentono di configurare Trajexia in base alla
progettazione della macchina.
5.2.4 MECHATROLINK-II
Il modulo TJ1-ML__ controlla fino a 16 servoazionamenti, inverter
o moduli di I/O, sempre consentendo totale trasparenza in tutto
il sistema. MECHATROLINK-II offre una velocità di comunicazione
e una precisione nei tempi essenziali per garantire un perfetto
controllo del movimento dei servo. È possibile selezionare
un tempo di ciclo del movimento di 0,5 ms, 1 ms o 2 ms.
Revisione 3.0
5.2.5 TJ1-FL02
La TJ1-FL02 è un'unità di controllo analogica che controlla fino
a due assi nelle seguenti modalità:
GUIDA RAPIDA DI UTILIZZO 44

Ulteriori informazioni
• Velocità di riferimento analogica con retroazione dell'encoder.
• Ingresso encoder, a impulsi o assoluto.
• Uscita a impulsi.
All'unità TJ1-FL02 è possibile collegare qualunque
servoazionamento.
5.2.6 Servoazionamenti e inverter
Per soddisfare ogni requisito di compattezza, prestazioni
e affidabilità, è disponibile un'ampia scelta di servo rotativi,
lineari e a direct drive, nonché di inverter. Gli inverter collegati
a MECHATROLINK-II vengono azionati con lo stesso tempo
di ciclo di aggiornamento dei servoazionamenti.
5.2.7 Moduli I/O remoti
I moduli di I/O del bus MECHATROLINK-II consentono l'espansione
del sistema, mantenendo i dispositivi sotto un unico bus.
5.2.8 PROFIBUS
TJ1-PRT è un'interfaccia tra Trajexia e una rete PROFIBUS.
5.2.9 DeviceNet
TJ1-DRT è un'interfaccia tra Trajexia e una rete DeviceNet.
5.3 Manuali su Trajexia
Tutte le informazioni su Trajexia sono presenti nei seguenti
manuali:
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 45

Ulteriori informazioni
/i
Nome Cat. No. Sommario
Trajexia motion control system
Hardware Reference Manual
(Sistema di controllo assi
Trajexia – Manuale di riferimento hardware)
Trajexia motion control system
(Sistema di controllo assi
Trajexia)
Programming Manual
(Manuale di programmazione)
I51E Descrive la procedura
di installazione e le specifiche hardware delle unità
Trajexia, nonché la filosofia
di Trajexia.
I52E Descrive i comandi in BASIC
da utilizzare per la programmazione di Trajexia, spiega
i protocolli di comunicazione
e il software Trajexia Tools,
fornisce esempi pratici e informazioni per la risoluzione
dei problemi.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 46

Storico delle revisioni
Storico delle revisioni
Il suffisso al numero di catalogo stampato sulla copertina del manuale indica il codice di revisione del documento.
/i
Codice di revisione Data Contenuto modificato
01 Agosto 2006 Originale
02 Ottobre 2006 Aggiornamento per DeviceNet
03 Maggio 2007 Aggiornamento con TJ1-MC04 e TJ1-ML04.
Aggiornamento con informazioni generali su Trajexia e sulle relative caratteristiche distintive.
Revisione 3.0
GUIDA RAPIDA DI UTILIZZO 47
 Loading...
Loading...