


Cat. No.
I50E-FR-03
Système de contrôle d’axes Trajexia
TJ1-MC04
TJ1-M C 16
GUIDE DE DEMARRAGE RAPIDE
Contenu
1 Introduction...................................................................................................................................................................................................4
1.1 À propos de ce guide........................................................................................................................................................................................................................4
1.2 Présentation de ce guide ..................................................................................................................................................................................................................5
1.3 Éléments requis ................................................................................................................................................................................................................................6
2 Déballage et installation sur rail..................................................................................................................................................................7
2.1 Règles relatives à un système Trajexia ............................................................................................................................................................................................7
2.2 Contenu des emballages ..................................................................................................................................................................................................................8
2.3 Installer le système Trajexia ...........................................................................................................................................................................................................10
3 Connexions .................................................................................................................................................................................................13
3.1 Avant de travailler ...........................................................................................................................................................................................................................13
3.2 Cartes d’alimentation ......................................................................................................................................................................................................................13
3.2.1 Carte d’alimentation recommandée..................................................................................................................................................................................14
3.2.2 Cartes d’alimentation en option ........................................................................................................................................................................................15
3.3 Carte TJ1-MC__ .............................................................................................................................................................................................................................16
3.4 Carte TJ1-ML__..............................................................................................................................................................................................................................17
3.4.1 Connecter la carte d’interface MECHATROLINK-II au servodriver ..................................................................................................................................18
3.4.2 Connecter le servodriver monophasé 200 V ....................................................................................................................................................................19
3.4.3 Connecter le servodriver triphasé 400 V ..........................................................................................................................................................................20
3.4.4 Connecter la carte NS115 ................................................................................................................................................................................................21
3.4.5 Régler les interrupteurs DIP et définir l’adresse de la carte NS115 .................................................................................................................................22
3.5 Installation complète .......................................................................................................................................................................................................................23
4 Trajexia Tools..............................................................................................................................................................................................24
4.1 Configuration PC requise................................................................................................................................................................................................................24
4.2 Installer le logiciel Trajexia Tools....................................................................................................................................................................................................24
4.3 Connexion à la carte TJ1-MC__ .....................................................................................................................................................................................................29
4.4 Créer un projet pour la première fois ..............................................................................................................................................................................................34
4.5 Installation complète .......................................................................................................................................................................................................................42
5 Informations supplémentaires...................................................................................................................................................................43
5.1 Système Trajexia ............................................................................................................................................................................................................................43
5.2 Caractéristiques générales de Trajexia ..........................................................................................................................................................................................44
5.2.1 Connectivité directe via Ethernet......................................................................................................................................................................................44
5.2.2 Préservation de votre savoir-faire.....................................................................................................................................................................................44
5.2.3 Port série et E/S locales ...................................................................................................................................................................................................44
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 2
5.2.4 MECHATROLINK-II..........................................................................................................................................................................................................44
5.2.5 TJ1-FL02 ..........................................................................................................................................................................................................................44
5.2.6 Drivers et variateurs .........................................................................................................................................................................................................45
5.2.7 E/S déportées...................................................................................................................................................................................................................45
Contenu
5.2.8 PROFIBUS .......................................................................................................................................................................................................................45
5.2.9 DeviceNet .........................................................................................................................................................................................................................45
5.3 Manuels Trajexia ............................................................................................................................................................................................................................45
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 3
Introduction
1 Introduction
Ce Guide de démarrage rapide permet à l’utilisateur de se
familiariser rapidement avec le système Trajexia. Il explique
comment faire déplacer un seul axe dans un environnement
d’ordinateur de bureau simple par le système Trajexia et un
servodriver Sigma-II via MECHATROLINK-II.
Ce Guide de démarrage rapide est destiné au personnel
disposant d’une connaissance des systèmes électriques
(ingénieur électricien ou équivalent).
L’ingénieur doit garantir une utilisation en toute sécurité,
conformément aux caractéristiques d’alimentation (alimentation
pour Trajexia et pour le servodriver, qui peut être 380 Vc.a.)
et aux éléments mobiles du moteur.
Lors de l’utilisation du système Trajexia dans une application
réelle, les avertissements et consignes de sécurité stipulés
dans le Manuel de référence du matériel doivent être respectés.
Pour des informations détaillées sur le système Trajexia,
reportez-vous aux manuels répertoriés à la section 5.3.
1.1 À propos de ce guide
Ce Guide de démarrage rapide explique comment connecter un
système Trajexia à un servodriver Sigma-II via une communication
MECHATROLINK-II. Il décrit également la procédure d’installation
du logiciel d’exploitation Trajexia Tools et fournit un exemple
de programme pilotant un servomoteur.
Ce Guide de démarrage rapide fournit des procédures et des
informations descriptives. Les étapes des procédures à exécuter
sont numérotées. Toutes les autres informations correspondent
à du texte simple ou à des listes à puces.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 4
Introduction
1.2 Présentation de ce guide
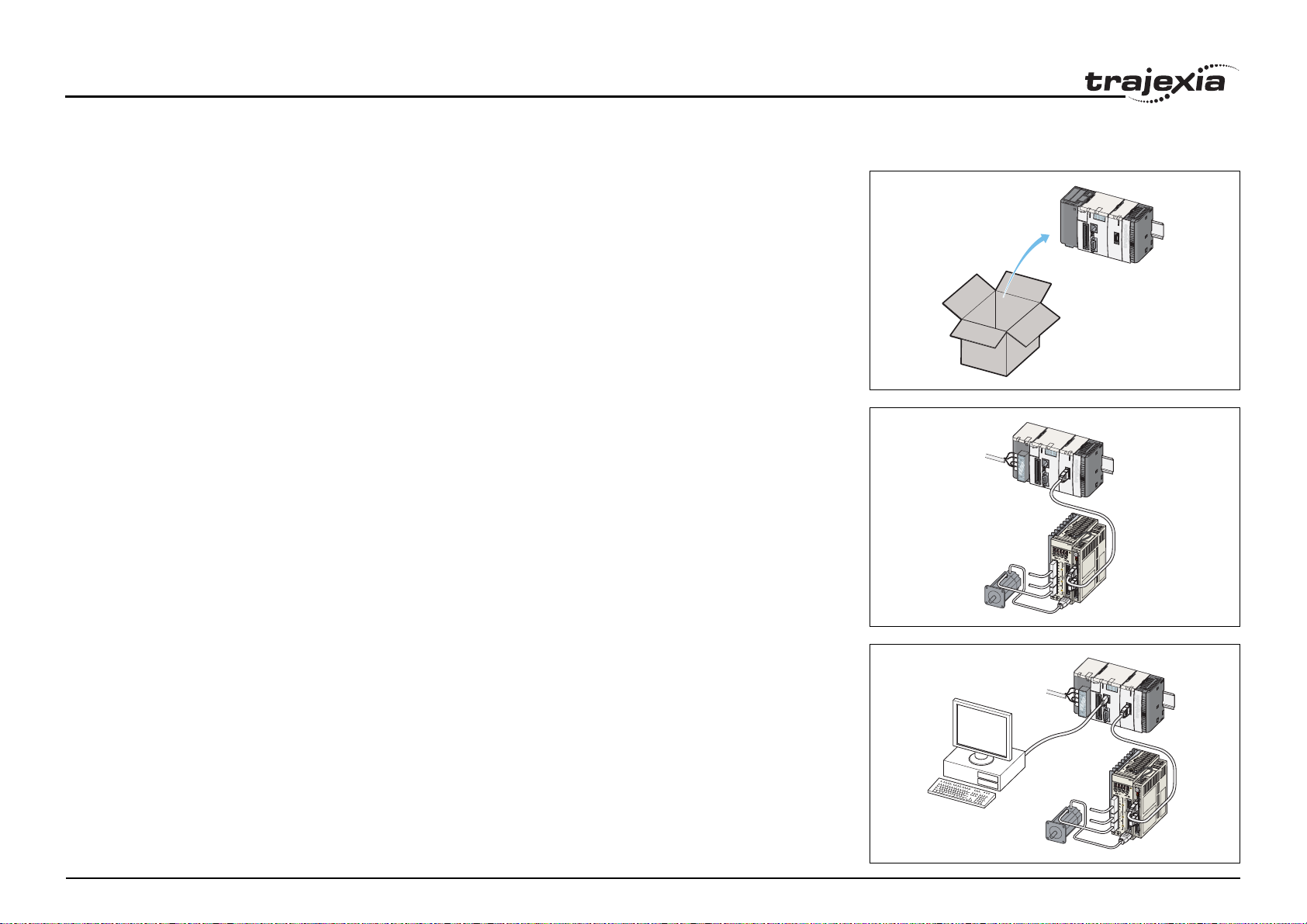
Le chapitre 2 explique comment déballer les produits et installer
les unités Trajexia sur un rail.
Le chapitre 3 décrit comment connecter un servomoteur
au système Trajexia.
Fig. 1
Fig. 2
MC16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
CN1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
M
C
1
6
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
C
N
O
1
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
Le chapitre 4 explique comment connecter le système Trajexia
Fig. 3
à un ordinateur et écrire un exemple de programme permettant
MC
de piloter le servomoteur.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 5
16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
CN1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
Introduction
1.3 Éléments requis
Dans le cadre de l’installation décrite dans ce Guide de démarrage
rapide, vous avez besoin des éléments ci-dessous.
1.3.1 Unités Trajexia
• Une carte d’alimentation :
- CJ1W-PA202
- CJ1W-PA205R
- CJ1W-PD025
• Un TJ1-MC__ (contrôleur d’axes) :
-TJ1-MC04
-TJ1-MC16
• Une carte maître MECHATROLINK-II TJ1-ML__ :
- TJ1-ML04
- TJ1-ML16
• Une carte de terminaison TJ1-TER, fournie avec la carte
TJ1-MC__.
1.3.2 Autres cartes
• Une carte d’interface MECHATROLINK-II (NS115).
• Un câble MECHATROLINK-II.
• Une terminaison MECHATROLINK-II.
• Un servodriver monophasé 200 V ou un servodriver triphasé 400 V.
• Un servomoteur.
• Un ordinateur.
• Le CD-ROM du logiciel Trajexia Tools.
• Des câbles d’alimentation et de codeur pour relier
le servodriver au moteur.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 6
Déballage et installation sur rail
2 Déballage et installation sur rail
Ce chapitre décrit les opérations à effectuer pour installer les unités
sur un rail DIN.
2.1 Règles relatives à un système Trajexia
Avant de raccorder les cartes, veillez à respecter les règles
de raccordement ci-dessous :
• La première carte située à gauche est une carte d’alimentation.
• Vous devez raccorder une carte TJ1-MC__ à la carte
d’alimentation.
• Vous ne pouvez pas raccorder plus de sept cartes plus une
carte TJ1-TER à la carte TJ1-MC__.
• La dernière carte doit être une carte TJ1-TER.
• Vous pouvez installer jusqu’à quatre cartes TJ1-ML__ sur le système.
• Vous pouvez installer jusqu’à sept cartes TJ1-FL02
(carte d’axe flexible) sur le système avec la carte TJ1-MC16.
Vous pouvez installer jusqu’à trois cartes TJ1-FL02 sur le
système avec la carte TJ1-MC04.
• Vous pouvez installer une carte TJ1-PRT
(carte esclave PROFIBUS-DP) ou une carte TJ1-DRT
(carte esclave DeviceNet) sur le système.
• Vous pouvez placer les cartes entre les cartes TJ1-MC__
et TJ1-TER dans n’importe quel ordre.
Ne changez pas la position des cartes après avoir écrit des
programmes, car ceux-ci risquent de ne plus être valables.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 7
Déballage et installation sur rail
2.2 Contenu des emballages
Cette section répertorie les cartes Trajexia dont vous avez besoin
dans le cadre de l’installation.
2.2.1 Carte d’alimentation
L’emballage de la carte d'alimentation contient les éléments suivants :
• Fiche de sécurité
• Carte d’alimentation
• Étiquette de protection apposée à la surface de la carte
2.2.2 Carte TJ1-MC__
L’emballage de la carte TJ1-MC__ contient les éléments suivants :
• Fiche de sécurité
• Carte TJ1-MC__
• Étiquette de protection apposée à la surface de la carte TJ1-MC__
• Carte TJ1-TER, raccordée à la carte TJ1-MC__
• Pièces d’un connecteur série
• Pièces d’un connecteur d’E/S
• Deux clips en métal pour rail DIN pour empêcher le système
Trajexia de glisser du rail
• Clip blanc pour remplacer le clip jaune de la carte d’alimentation
2.2.3 Carte TJ1-ML__
L’emballage de la carte TJ1-ML__ contient les éléments suivants :
• Fiche de sécurité
• Carte TJ1-ML__
• Étiquette de protection apposée à la surface de la carte
2.2.4 Logiciel
L’emballage du logiciel contient les éléments suivants :
• CD-ROM du logiciel Trajexia Tools
Révision 3.0
• Étiquette mentionnant le numéro de licence du logiciel,
apposée sur le boîtier du CD
• Carte d’enregistrement pour la garantie
GUIDE DE DÉMARRAGE RAPIDE 8
Déballage et installation sur rail
• Étiquettes d’adresses
• Enveloppe de licence
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 9
Déballage et installation sur rail
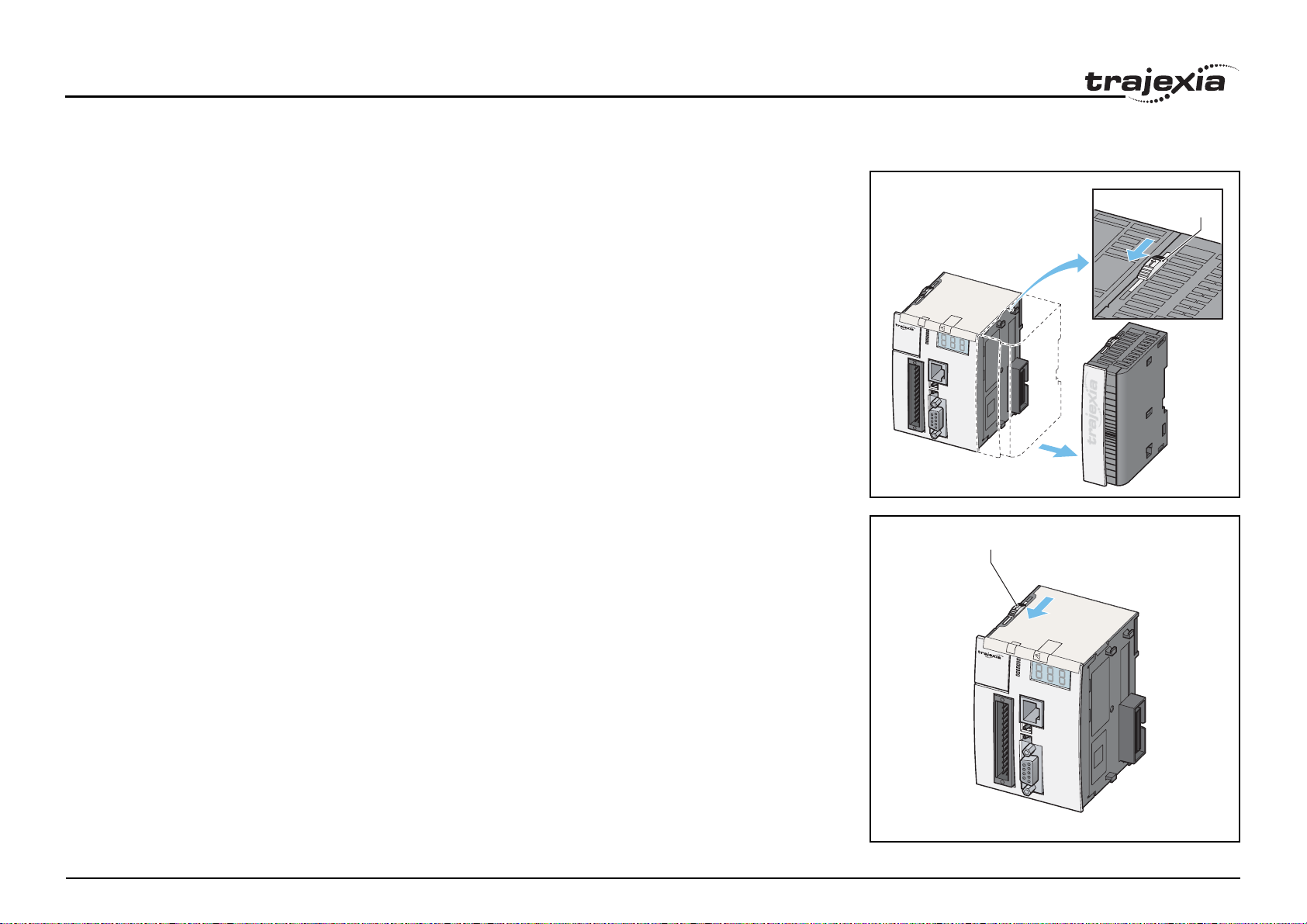
2.3 Installer le système Trajexia
1. Retirez toutes les cartes de leur emballage. Assurez-vous
que tous les éléments sont présents.
2. Ne retirez pas les étiquettes de protection sur les cartes.
3. Pour débrancher les cartes TJ1-MC__ et TJ1-TER, faites
glisser vers l’avant les clips (A) situés en haut et en bas
de la carte TJ1-TER.
4. Déconnectez la carte TJ1-TER de la carte TJ1-MC__.
5. Faites glisser vers l’avant les clips (A) situés en haut et en bas
de toutes les cartes.
Fig. 1
Fig. 2
A
MC16
0
O
1
M
R
O
N
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
5
6
7
C
N
3
C
N
1
T
E
R
M
O
N
/O
F
F
W
IR
E
2
/4
C
N
2
A
MC16
0
OMRON
1
2
MOTION CONTROLLER
3
4
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 10
Déballage et installation sur rail
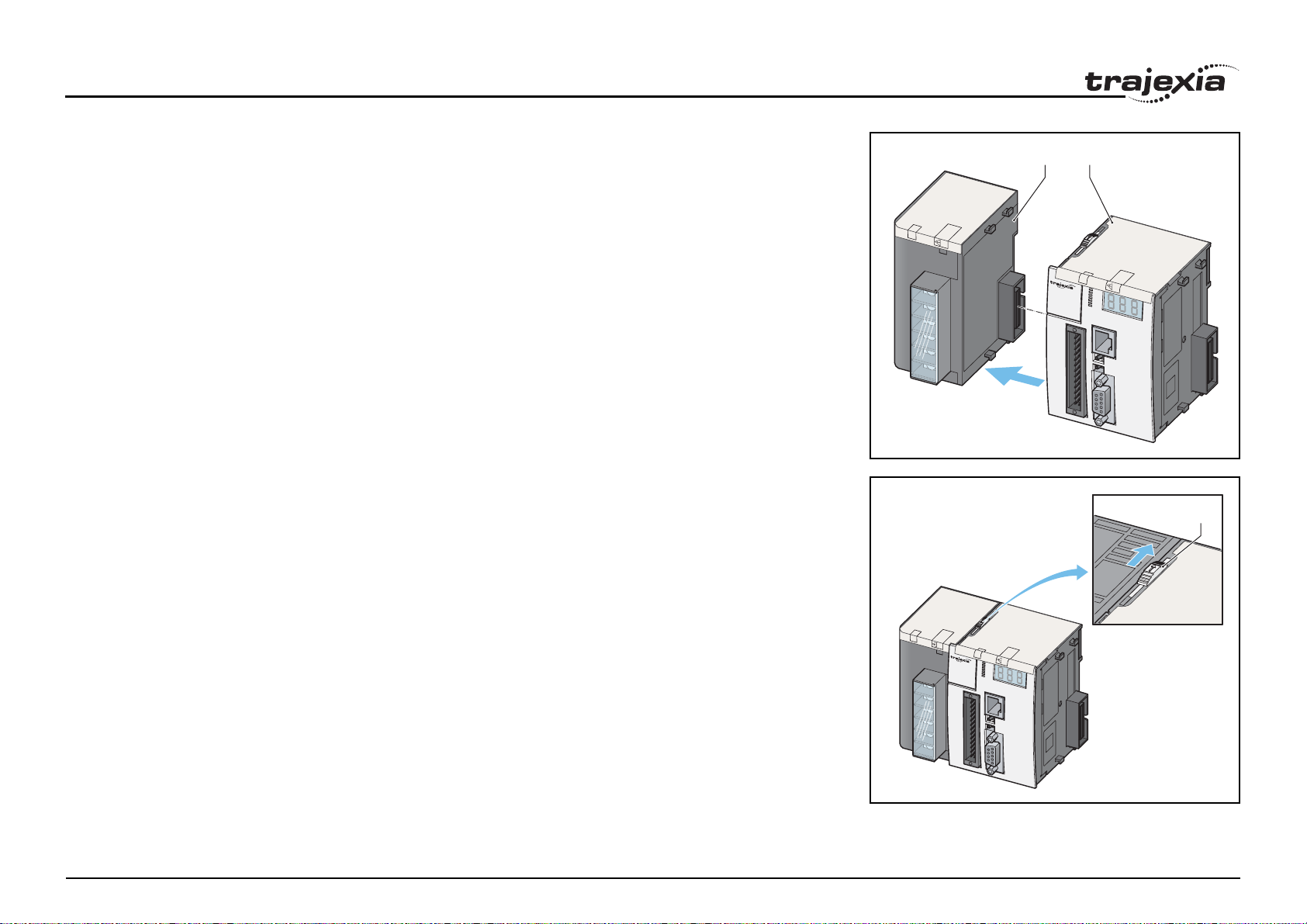
6. Assemblez la carte TJ1-MC__ (C) et la carte d’alimentation (B).
7. Faites glisser vers l’arrière les clips (A) situés en haut et en bas.
Fig. 3
Fig. 4
MC16
OMRON
MOTION CONTROLL
CB
0
1
2
3
4
ER
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
A
MC16
0
OMRON
1
2
M
OTION CON
3
TROLLER
4
5
6
7
C
N3
C
N1
TERM
ON
/O
FF
W
IRE
2/4
CN
2
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 11
Déballage et installation sur rail
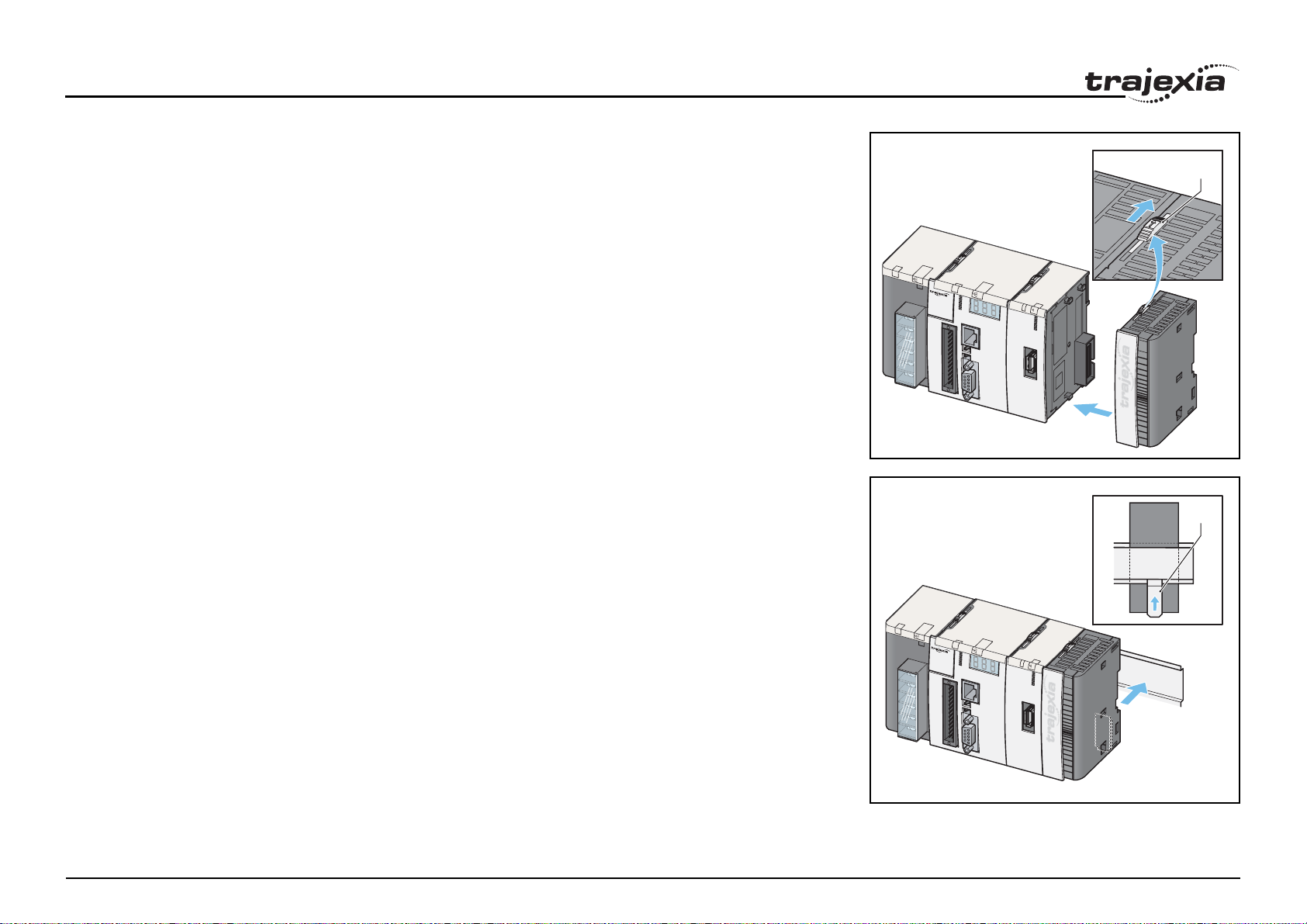
8. Répétez les deux étapes précédentes pour toutes les autres
cartes à connecter.
9. Assurez-vous que la dernière carte connectée est une carte
TJ1-TER.
10. Faites glisser vers le bas tous les clips (D) de toutes les cartes.
11. Placez le système Trajexia sur le rail DIN.
12. Faites glisser vers le haut tous les clips (D) de toutes les cartes.
Fig. 5
Fig. 6
MC16
O
M
R
O
MOTION CONTROLLER
A
0
1
N
2
3
4
M
L
5
6
7
CN3
1
6
R
U
N
8
CN1
TERM
ON/OFF
W
IRE
2/4
CN2
F
C
N
1
D
MC16
0
O
1
M
R
ON
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
C
N
3
ML16
5
6
7
C
N
1
T
E
R
M
O
N
/
O
F
F
W
IR
E
2
/
4
C
N
2
R
U
N
8
F
C
N
1
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 12
Connexions
3 Connexions
Ce chapitre décrit les connexions des cartes Trajexia.
3.1 Avant de travailler
Dans cet environnement d’ordinateur de bureau, les arrêts
d’urgence, les circuits de verrouillage et les interrupteurs
de position ne sont pas installés.
Attention
L’ingénieur doit garantir une utilisation en toute sécurité,
conformément aux caractéristiques d’alimentation
(alimentation pour Trajexia et pour le servodriver, qui
peut être 380 Vc.a.) et aux éléments mobiles du moteur.
3.2 Cartes d’alimentation
Vous pouvez utiliser trois types différents de cartes d’alimentation :
/i
Carte
d’alimentation
CJ1W-PA202 c.a. 110 – 240 V 85 – 264 V 47 – 63 Hz 14 W
CJ1W-PA205R c.a. 110 – 240 V 85 – 264 V 47 – 63 Hz 25 W
CJ1W-PD025 c.c. 24 V 21,6 – 26,4 V N / A 25 W
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 13
Courant Tension
d’entrée
Limites
de tension
de fonctionnement
Limites
de fréquence
de fonctionnement
Puissance
de sortie
Connexions
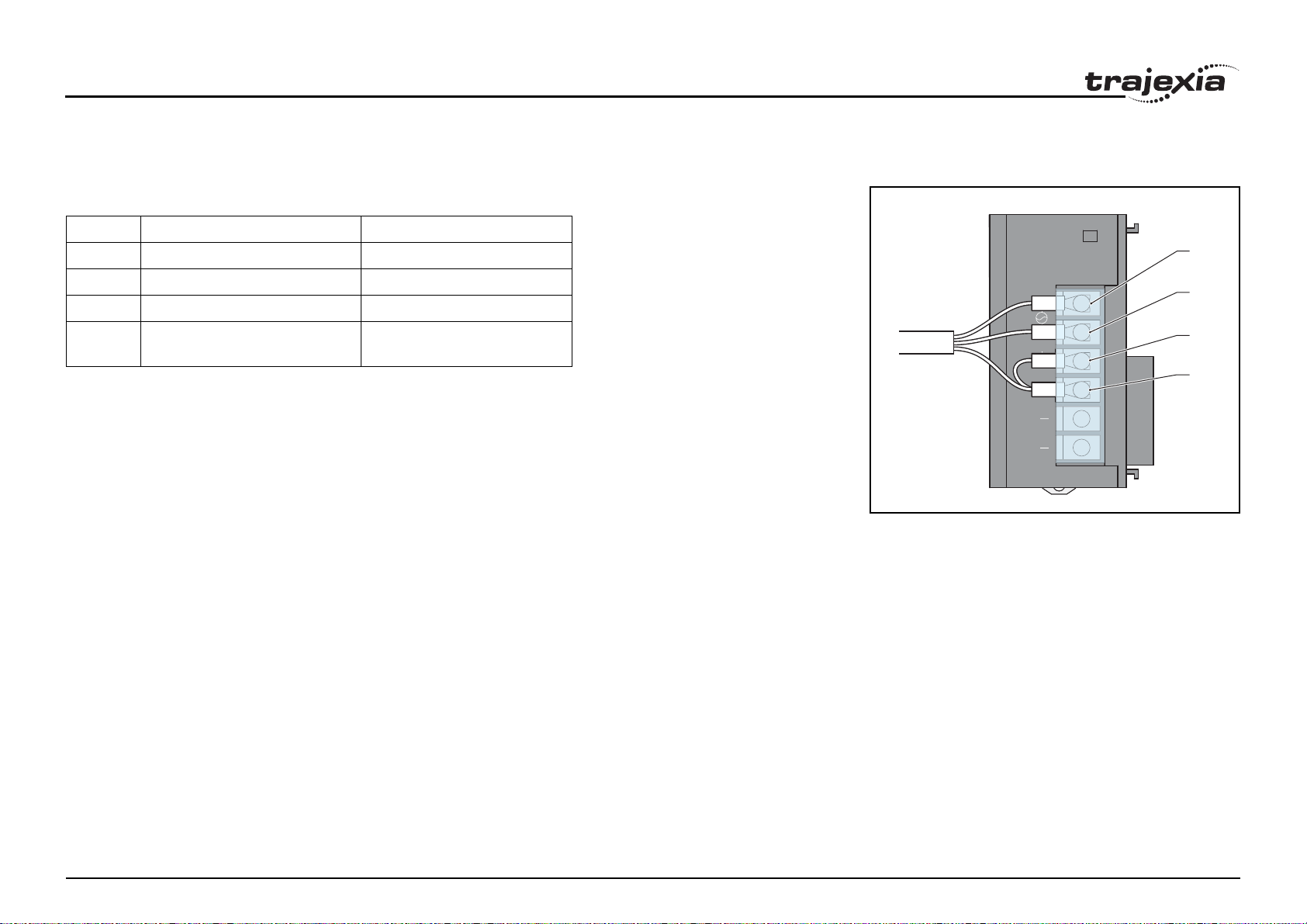
3.2.1 Carte d’alimentation recommandée
Il est recommandé d’utiliser la carte d’alimentation CJ1W-PA202.
1. Connectez la carte d’alimentation CJ1W-PA202 comme suit :
/i
Borne Description Connexion
A Alimentation 110 – 240 V Vc.a. sous tension
B Alimentation 110 – 240 V Vc.a. sous tension
C Terre de ligne Court-circuit avec la borne D
D Terre • Court-circuit avec la borne C
•Terre
Fig. 1
PA2 02
AC100
-240V
INPUT
L2/N
POWER
A
L1
B
C
D
NC
NC
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 14
Connexions
A
V
O
T
RUN
INPUT
V
L2/N
UT
C
C
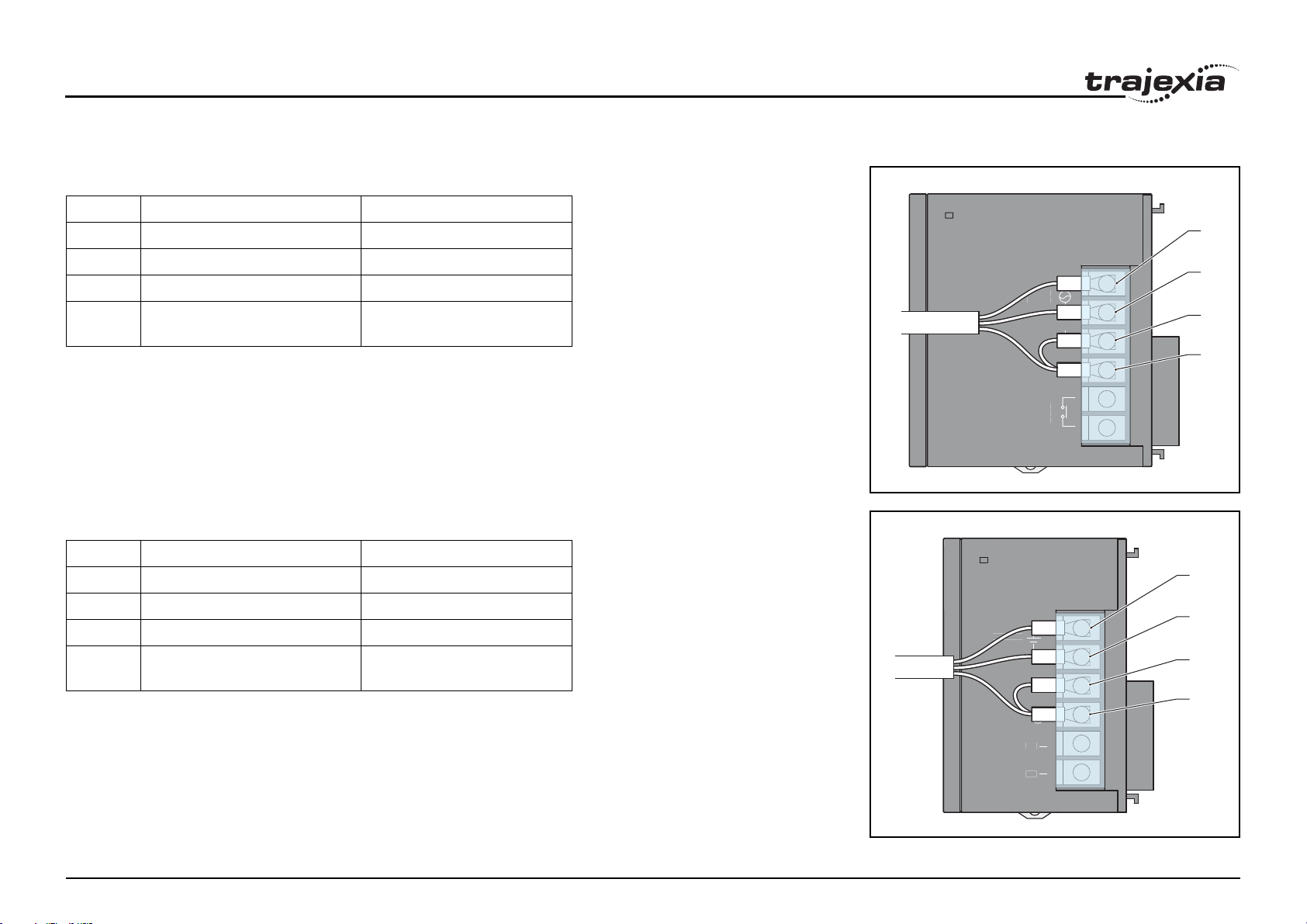
3.2.2 Cartes d’alimentation en option
1. Connectez la carte d’alimentation CJ1W-PA205R comme suit :
/i
Borne Description Connexion
A Alimentation 110 – 240 V Vc.a. sous tension
B Alimentation 110 – 240 V Vc.a. sous tension
C Terre de ligne Court-circuit avec la borne D
D Terre • Court-circuit avec la borne C
•Terre
1. Connectez la carte d’alimentation CJ1W-PD025 comme suit :
/i
Borne Description Connexion
A Alimentation 24 V 24 Vc.c.
B Alimentation 0 V 0 V
C Terre de ligne Court-circuit avec la borne D
D Terre • Court-circuit avec la borne C
•Terre
Fig. 2
Fig. 3
PA2 05 R
POWER
PD025
PD025
POWER
POWER
INP
AC100-240
UTPU
C240
DC24V
A
B
C
D
A
B
C
D
N
N
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 15

Connexions
3.3 Carte TJ1-MC__
3.3.1 Port Ethernet
Lorsque vous mettez le système Trajexia sous tension, l’affichage
à trois chiffres (A) indique l’adresse IP et le masque de sous-réseau
de la carte TJ1-MC__.
Utilisez le port Ethernet (B) pour connecter la carte TJ1-MC__
à un ordinateur. Vous pouvez utiliser un câble Ethernet croisé
et droit. Si vous reliez directement l’ordinateur à la carte TJ1-MC__
(et non via un hub ou un autre périphérique réseau),
l’ordinateur doit disposer d’une adresse IP fixe.
La carte TJ1-MC__ est détectée automatiquement lorsque vous
insérez un câble Ethernet dans le port Ethernet. L’affichage (A)
indique alors l’adresse IP de la carte TJ1-MC__.
3.3.2 Port série
Le port série (D) sert à connecter la carte TJ1-MC__ à un
périphérique nécessitant une connexion série. Pour obtenir une
description de ce port, reportez-vous au Manuel de référence du
matériel. Ce port n’est pas nécessaire dans l’exemple d’installation.
3.3.3 Port d'E/S 28 broches
Le port d’E/S 28 broches (C) intègre 16 entrées numériques
et 8 sorties numériques. Pour obtenir une description de ce port,
reportez-vous au Manuel de référence du matériel.
Ce port n’est pas nécessaire dans l’exemple d’installation.
Fig. 4
A
B
C
D
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 16

Connexions
3.4 Carte TJ1-ML__
La carte TJ1-ML__ est le maître de plusieurs périphériques
MECHATROLINK-II, à savoir des servodrivers, des entrées /
sorties et des variateurs. Les entrées / sorties et les variateurs
sont décrits dans le Manuel de référence du matériel.
La carte TJ1-ML__ intègre un port (A) permettant d’établir
la connexion avec le premier périphérique MECHATROLINK-II.
Fig. 5
ML16
RUN
8F
CN1
A
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 17

Connexions
3.4.1 Connecter la carte d’interface MECHATROLINK-II
au servodriver
Vous pouvez utiliser un servodriver monophasé 200 V
(voir page 19) ou un servodriver triphasé 400 V (voir page 20).
1. Insérez les clips (A) de la carte d’interface MECHATROLINK-II
(NS115) dans les ouvertures (B) du servodriver.
2. Assurez-vous que le port (C) du servodriver est situé à l’opposé
de la fente de la carte NS115.
3. Insérez le clip (D) de la carte NS115 dans l’ouverture (E)
du servodriver.
4. Branchez le fil de terre (F) de la carte NS115 au point G (G)
sur le servodriver.
Fig. 6
Fig. 7
C
G
B
E
D
A
F
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 18

Connexions
3.4.2 Connecter le servodriver monophasé 200 V
1. Les bornes du groupe A sont destinées à l’entrée
d’alimentation servant à générer la sortie d’alimentation
vers le moteur (groupe C). Raccordez les bornes comme suit :
/i
Borne Description Connexion
D, E Alimentation 200 – 230 V Vc.a. sous tension
F Bus +c.c. 1 Court-circuit avec la borne G
G Bus +c.c. 2 Court-circuit avec la borne F
2. Les bornes du groupe B sont destinées à l’entrée pour
l’alimentation interne du servodriver (affichage, voyants).
Raccordez les bornes comme suit :
/i
Borne Description Connexion
H Alimentation 200 – 230 V Vc.a. sous tension
I Alimentation 200 – 230 V Vc.a. sous tension
3. Les bornes du groupe C sont destinées à la sortie d’alimentation
vers le servomoteur. Raccordez les bornes comme suit :
/i
Fig. 8
G
D
E
F
H
I
L1
L2
L1C
L2C
B1
B2
1
2
200V
MODE/SET
A
B
C
CHARGE
DATA/
POWER
C
L1
N
3
L2
1
2
C
N
1
L1C
L2C
B1
B2
U
v
C
N
w
2
Borne Description Connexion
J
U Phase U du moteur Borne U sur le moteur
V Phase V du moteur Borne V sur le moteur
W Phase W du moteur Borne W sur le moteur
4. Branchez le câble du codeur du servomoteur sur le port
d’entrée du codeur (J).
Révision 3.0
U
W
U
V
V
W
GUIDE DE DÉMARRAGE RAPIDE 19

Connexions
3.4.3 Connecter le servodriver triphasé 400 V
1. Les bornes du groupe A sont destinées à l’entrée
d’alimentation servant à générer la sortie d’alimentation
vers le moteur (groupe C). Raccordez les bornes comme suit :
/i
Borne Description Connexion
D, E, F Alimentation triphasée 400 V Vc.a. sous tension
G Bus +c.c. 1 Court-circuit avec la borne H
H Bus +c.c. 2 Court-circuit avec la borne G
2. Les bornes du groupe B sont destinées à l’entrée pour
l’alimentation interne du servodriver (affichage, voyants).
Raccordez les bornes comme suit :
/i
Borne Description Connexion
I Alimentation de contrôle 24 Vc.c.
J Alimentation de contrôle 0 Vc.c.
K
Commun de résistance de régénération
L Résistance de régénération interne Court-circuit avec la borne K
1. En cas d’utilisation de la résistance interne.
Court-circuit avec la borne L
Fig. 9
D
E
F
G
H
I
J
K
1
L
L1
L2
L3
L1C
L2C
B1
B2
B3
1
2
MODE/SET
CHARGE
A
B
C
400V
DATA/
POWER
C
L1
N
3
L2
L3
1
2
C
N
1
L1C
L2C
B1
B2
B3
U
v
C
N
w
2
3. Les bornes du groupe C sont destinées à la sortie d’alimentation
M
vers le servomoteur. Raccordez les bornes comme suit :
/i
Borne Description Connexion
U Phase U du moteur Borne U sur le moteur
V Phase V du moteur Borne V sur le moteur
U
W
U
V
V
W
W Phase W du moteur Borne W sur le moteur
Révision 3.0
4. Branchez le câble du codeur du servomoteur sur le port
d’entrée du codeur (M).
GUIDE DE DÉMARRAGE RAPIDE 20

Connexions
3.4.4 Connecter la carte NS115
La carte NS115 intègre un interrupteur DIP, un sélecteur d’adresse
et deux ports de bus MECHATROLINK-II.
/i
Port ou interrupteur
A Sélecteur d’adresse
B Interrupteur DIP
C Ports de bus MECHATROLINK-II
Description
1. Connectez un câble MECHATROLINK-II (E) à la carte
TJ1-ML__ (D) et à l’un des ports de bus de la carte NS115.
2. Connectez une terminaison MECHATROLINK-II (F) à l’autre
port de bus de la carte NS115.
Fig. 10
A
B
C
C
Fig. 11
D E
Révision 3.0
F
GUIDE DE DÉMARRAGE RAPIDE 21

Connexions
3.4.5 Régler les interrupteurs DIP et définir l’adresse
de la carte NS115
Les interrupteurs DIP de la carte NS115 permettent d’en configurer
les paramètres de communication.
1. Réglez les interrupteurs DIP comme suit :
/i
Interrupteur DIP
1 Vitesse de
2 Longueur des
3 Plage d’adres-
4 Maintenance
Fonction Réglage Description
ON 10 Mbps
transmission
ON Transmission de données 32 octets
données
OFF Adresses 40 à 4F
ses
OFF Doit toujours être réglé sur OFF.
(réservé)
Le réglage ON n’est pas utilisé.
2. Placez le sélecteur d’adresse de la carte NS115 sur la
position 1, pour attribuer l’adresse logique 41 au servodriver.
Fig. 12
23 4
1
ON OFF
Fig. 13
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 22

Connexions
3.5 Installation complète
L’installation complète illustrée dans cet exemple est constituée
d’une carte d’alimentation (A), d’une carte TJ1-MC__ (B), d’une
carte TJ1-ML__ (C), d’un servodriver (D), d’une carte NS115 (E),
d’un moteur (F) et d’une carte TJ1-TER (G).
Vous pouvez à présent retirer les étiquettes de protection sur les cartes.
Fig. 14
G
C
B
A
M
C
1
6
0
O
1
M
R
O
N
2
MOTION CON
3
TROLLER
4
M
L
1
5
6
7
CN3
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
F
D
E
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 23

Trajexia Tools
4 Trajexia Tools
4.1 Configuration PC requise
Pour installer Trajexia Tools, vous devez disposer d’un ordinateur
(PC) présentant la configuration requise ci-dessous :
• Windows 98 SE
• Processeur Pentium 300 MHz
• 64 Mo de mémoire RAM
• 140 Mo d’espace disque disponible
• Port Ethernet
• Si vous utilisez le système d’exploitation Windows 98 SE
ou Windows ME : Internet Explorer 5.0
• Si vous utilisez le système d’exploitation Windows 2000
ou Windows XP : Internet Explorer 6.0
4.2 Installer le logiciel Trajexia Tools
1. Insérez le CD Trajexia Tools dans le lecteur de CD-ROM
de l’ordinateur.
2. Le programme d’installation de Trajexia Tools démarre
automatiquement.
3. Si le programme d’installation de Trajexia Tools ne démarre
pas automatiquement, démarrez-le manuellement : exécutez
setup.exe à partir du répertoire racine du CD.
4. Sélectionnez la langue de votre choix dans la liste déroulante.
Cliquez sur OK.
Fig. 1
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 24

Trajexia Tools
5. La fenêtre d’installation de Trajexia Tools s’affiche. Cliquez sur
Next (Suivant).
6. Cliquez sur Yes (Oui) pour accepter le contrat de licence
et continuer.
Fig. 2
Fig. 3
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 25

Trajexia Tools
7. Entrez votre nom dans le champ Name (Nom).
8. Entrez le nom de votre société dans le champ
Company
(Société).
9. Entrez votre numéro de licence dans les champs Licence.
Ce numéro de licence figure sur l’étiquette apposée sur
le boîtier du CD Trajexia Tools.
10. Cliquez sur Next (Suivant).
11. Cliquez sur Yes (Oui).
Fig. 4
Fig. 5
12. Cliquez sur Next (Suivant).
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 26
Fig. 6

Trajexia Tools
13. Cliquez sur Next (Suivant).
14. Cliquez sur Next (Suivant).
Fig. 7
Fig. 8
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 27

Trajexia Tools
15. Cliquez sur Next (Suivant).
16. Le programme d’installation de Trajexia Tools copie des fichiers
vers l’ordinateur. Cette opération peut prendre quelques
minutes.
17. Cliquez sur Finish (Terminer). La fenêtre du fichier LisezMoi
de CX-Drive s’affiche. Fermez cette fenêtre.
Fig. 9
Fig. 10
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 28

Trajexia Tools
4.3 Connexion à la carte TJ1-MC__
Pour relier l’ordinateur à la carte TJ1-MC__, vous avez besoin d’un
câble Ethernet droit ou croisé.
1. Connectez le système Trajexia à l’alimentation secteur.
2. L’adresse IP et le masque de sous-réseau de la carte TJ1-MC__
s’affichent trois fois sur l’affichage (A). L’adresse IP par défaut de
la carte TJ1-MC__ est 192.168.0.250. Le masque de sous-réseau
par défaut est 255.255.255.0.
3. Si vous souhaitez consulter l’adresse IP et le masque de sous-
réseau de la carte TJ1-MC__, mettez le système Trajexia hors
tension, puis remettez-le sous tension.
4. Connectez le câble Ethernet au port Ethernet de l’ordinateur.
5. Connectez le câble Ethernet au port Ethernet de la carte
TJ1-MC__. L’adresse IP de la carte TJ1-MC__ s’affiche quatre
fois sur l’affichage.
Fig. 11
A
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 29

Trajexia Tools
6. Démarrez le programme Trajexia Tools sur l’ordinateur.
Dans le menu Démarrer de Windows, sélectionnez :
- Programmes
-OMRON
- Trajexia Tools
- Trajexia Tools
7. L’écran de démarrage Motion Perfect 2 s’affiche. Attendez que
le bouton Cancel (Annuler) s’affiche avant de cliquer dessus.
8. Dans la barre de menus, sélectionnez :
- Options
- Communications
Fig. 12
Fig. 13
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 30

Trajexia Tools
9. Assurez-vous que l’élément ENet0 est sélectionné dans la liste.
10. Cliquez sur Configure (Configurer).
11. Entrez 192.168.0.250 dans le champ Server name/IP address
(Nom / Adresse IP du serveur).
12. Cliquez sur OK.
13. Cliquez sur OK.
Fig. 14
Fig. 15
Fig. 16
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 31

Trajexia Tools
14. Ouvrez le Panneau de configuration Windows sur l’ordinateur.
15. Double-cliquez sur l’icône Connexions réseau.
16. Cliquez avec le bouton droit sur l’icône Connexion du réseau
local. Cliquez sur l’option Propriétés.
17. Cliquez sur l’onglet Général.
18. Sélectionnez Protocole Internet (TCP/IP) dans la liste.
19. Cliquez sur Propriétés.
Fig. 17
Fig. 18
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 32

Trajexia Tools
20. Cliquez sur l’onglet Général.
21. Cochez la case Utiliser l’adresse IP suivante.
22. Entrez 192.168.0.251 dans le champ Adresse IP.
23. Entrez 255.255.255.0 dans le champ Masque de sous-réseau.
24. Cliquez sur OK.
25. Cliquez sur OK.
26. Fermez la fenêtre Connexions réseau.
Fig. 19
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 33

Trajexia Tools
4.4 Créer un projet pour la première fois
1. Mettez hors tension le système Trajexia, le servodriver
et la carte NS115.
2. Mettez sous tension le servodriver et la carte NS115.
3. Mettez sous tension le système Trajexia.
4. Exécutez le programme Motion Perfect 2 sur l’ordinateur.
5. Dans la barre de menus, sélectionnez :
- Controller (Contrôleur)
- Connect (Connexion)
Fig. 20
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 34

Trajexia Tools
6. Attendez que le bouton OK s’affiche avant de cliquer dessus.
7. Cliquez sur New (Nouveau).
Fig. 21
Fig. 22
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 35

Trajexia Tools
8. Cliquez sur Yes (Oui).
9. Accédez à l’emplacement où vous souhaitez enregistrer
le nouveau projet dans l’arborescence Disk directory
(Répertoire du disque).
10. Entrez le nom du nouveau projet dans le champ Project name
(Nom du projet).
11. Cliquez sur Create (Créer).
Fig. 23
Fig. 24
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 36

Trajexia Tools
12. Cliquez sur OK.
13. Cliquez sur le bouton Intelligent drives (Drivers intelligents)
(A) de la barre d’outils.
Fig. 25
Fig. 26
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 37

Trajexia Tools
14. Cliquez sur le bouton Config.
15. Attendez que la fenêtre
MECHATROLINK Drive SGDH-01AE-OY
(Driver MECHATROLINK SGDH-01AE-OY) s’affiche.
16. Cliquez sur l’onglet Configuration.
Fig. 27
Fig. 28
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 38

Trajexia Tools
17. Faites défiler la liste pour atteindre la ligne dont la valeur
de la colonne Index est Pn50A.3.
18. Dans cette ligne, cliquez sur l’élément de la colonne Value
(Valeur). Une liste déroulante s’affiche.
19. Sélectionnez la valeur 8:Sets signal OFF.
(8 : Passe le signal à OFF) dans la liste déroulante.
20. Appuyez sur la touche Entrée. L’icône de la première colonne
de la ligne est à présent rouge, ce qui indique que vous avez
modifié le paramétrage de cette ligne.
21. Faites défiler la liste pour atteindre la ligne dont la valeur
de la colonne Index est Pn50B.0.
22. Dans cette ligne, cliquez sur l’élément de la colonne Value
(Valeur). Une liste déroulante s’affiche.
23. Sélectionnez la valeur 8:Sets signal OFF.
(8 : Passe le signal à OFF) dans la liste déroulante.
24. Appuyez sur la touche Entrée. L’icône de la première colonne
de la ligne est à présent rouge, ce qui indique que vous avez
modifié le paramétrage de cette ligne.
25. Cliquez sur le bouton Download to Drive
(Télécharger vers le driver) (A).
26. Cliquez sur Close (Fermer).
Fig. 29
Fig. 30
A
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 39

Trajexia Tools
27. Cliquez sur Close (Fermer).
28. Cliquez sur Yes (Oui).
Fig. 31
29. Mettez hors tension le système Trajexia et le servodriver
afin d’appliquer les nouveaux paramètres du driver.
30. Mettez sous tension le servodriver et la carte NS115.
31. Mettez sous tension le système Trajexia.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 40

Trajexia Tools
32. Dans la barre de menus, sélectionnez :
- Program (Programme)
- New (Nouveau)
33. Entrez le nom du nouveau programme dans le champ Enter
new program name (Entrer le nom du nouveau programme).
34. Cliquez sur OK.
Fig. 32
Fig. 33
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 41

Trajexia Tools
35. Ouvrez la fenêtre Edit (Édition).
36. Tapez l’exemple de programme ci-dessous dans la fenêtre Edit :
BASE(0)
SERVO=ON
WDOG=ON
loop:
MOVE(10000)
WAIT IDLE
WA(1000)
GOTO loop
37. Cliquez sur le bouton Run (Exécuter) (A) de la barre d’outils.
Remarque :
Les paramètres par défaut conviennent pour les codeurs
13 bits. Si l’exemple de programme ne fonctionne pas,
effectuez les étapes ci-dessous :
38. Consultez les caractéristiques ou le manuel du moteur pour
plus d’informations sur le type de codeur.
39. Si la résolution du moteur est plus élevée, diminuez la valeur
du paramètre P_GAIN et augmentez celle des paramètres
SPEED, ACCEL et DECEL. Consultez le Manuel de
programmation.
40. Réexécutez l’exemple de programme.
Fig. 34
4.5 Installation complète
Félicitations. Vous avez effectué toutes les étapes présentées
dans le présent guide. Vous disposez à présent d’une carte
d’alimentation, d’une carte TJ1-MC__ et d’une carte TJ1-ML__
connectée à un servomoteur, ainsi que d’un exemple
de programme permettant de piloter le servomoteur.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 42

Informations supplémentaires
5 Informations supplémentaires
5.1 Système Trajexia
Trajexia est la plate-forme de contrôle d’axes d’Omron qui procure les
performances et la convivialité d’un système de contrôle d’axes dédié.
Trajexia est un système modulaire autonome qui offre une
souplesse et une évolutivité optimales. Au cœur de Trajexia,
on retrouve le nouveau coordinateur d’axes multitâches TJ1.
Optimisé par un DSP 32 bits, il peut effectuer des tâches de
contrôle d’axes telles que l’e-cam, l’e-gearbox, le contrôle
d’enregistrement et l’interpolation, le tout à l’aide de commandes
de contrôle simples.
Trajexia permet de contrôler jusqu’à 16 axes sur le bus d’axes
MECHATROLINK-II ou un contrôle analogique ou par impulsions
classique avec un contrôle indépendant de la position, de la
vitesse ou du couple de chaque axe. Par ailleurs, son puissant jeu
d’instructions d’axe permet une programmation intuitive et aisée.
Vous disposez d’un vaste choix de variateurs et de servodrivers
rotatifs, linéaires et à entraînement direct, qui se classent
aux meilleures places de leur catégorie. Enfin, le système est
extensible jusqu’à 16 axes et 8 variateurs et modules d’E/S.
IHM série NS
E/S numérique
Hostlink
MECHATROLINK-II
Fig. 1
API série CJ CX-One
Trajexia Tools
Ethernet
Maître
PROFIBUS-DP
Maître
DEVICENET
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 43

Informations supplémentaires
5.2 Caractéristiques générales de Trajexia
5.2.1 Connectivité directe via Ethernet
Le port Ethernet intégré de Trajexia permet d’établir une connexion
directe et rapide vers des ordinateurs, des API, des IHM et d’autres
périphériques. En outre, il fournit un accès complet aux drivers via un bus
de contrôle d’axes MECHATROLINK-II. Ce port autorise la transmission
de messages explicites via Ethernet et MECHATROLINK-II afin
de garantir la transparence totale jusqu’au niveau de l’actionneur.
Il permet enfin de configurer un accès à distance.
5.2.2 Préservation de votre savoir-faire
La méthode de cryptage de Trajexia garantit la protection
et la confidentialité de votre précieux savoir-faire.
5.2.3 Port série et E/S locales
Un port série fournit la connectivité directe aux API, IHM et autres
périphériques de terrain Omron. Des entrées / sorties sont librement
configurables (16 entrées et 8 sorties) sur le contrôleur, ce qui vous
permet de personnaliser Trajexia en fonction de votre équipement.
5.2.4 MECHATROLINK-II
La carte TJ1-ML__ permet de contrôler un maximum
de 16 servodrivers, variateurs ou E/S, tout en assurant
une transparence complète sur l’ensemble du système.
MECHATROLINK-II offre la vitesse de communication et la
précision temporelle essentielles pour garantir un parfait contrôle
des axes des servodrivers. Le temps de cycle de contrôle d’axes
peut être réglé sur différentes valeurs : 0,5 ms, 1 ms ou 2 ms.
5.2.5 TJ1-FL02
Révision 3.0
La carte TJ1-FL02 est une carte de contrôle analogique qui permet
de contrôler jusqu’à deux axes dans les modes suivantes :
GUIDE DE DÉMARRAGE RAPIDE 44

Informations supplémentaires
• Référence de vitesse analogique et retour de codeur.
• Entrée codeur, impulsions ou absolue.
• Sortie d’impulsions.
Vous pouvez connecter n’importe quel servodriver à la carte TJ1-FL02
5.2.6 Drivers et variateurs
Vous disposez d’un vaste choix de variateurs et de servodrivers
rotatifs, linéaires et à entraînement direct, qui répondent à tous
vos besoins en termes de compacité, de performances et de fiabilité.
Les variateurs raccordés au réseau MECHATROLINK-II sont pilotés
au même temps de cycle de mise à jour que les servodrivers.
5.2.7 E/S déportées
Les E/S du bus de contrôle d’axes MECHATROLINK-II permettent
d’étendre le système tout en regroupant les périphériques sur
un seul bus de contrôle d’axes.
5.2.8 PROFIBUS
La carte TJ1-PRT est une interface entre le système Trajexia
et le réseau PROFIBUS.
5.2.9 DeviceNet
La carte TJ1-DRT est une interface entre le système Trajexia
et le réseau DeviceNet.
.
5.3 Manuels Trajexia
Toutes les informations relatives au système Trajexia sont décrites
dans les manuels suivants :
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 45

Informations supplémentaires
/i
Nom Cat. No. Sommaire
Système de contrôle d’axes
Trajexia – Manuel de référence
du matériel
Système de contrôle d’axes
Trajexia – Manuel de programmation
I51E Décrit l’installation et les
caractéristiques matérielles
des cartes Trajexia. Explique
également la philosophie
du système Trajexia.
I52E Décrit les commandes BASIC
à utiliser pour programmer
le système Trajexia, explique
les protocoles de communication et le logiciel Trajexia
Tools, fournit des exemples
pratiques et des informations
de résolution des problèmes.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 46

Historique des révisions
Historique des révisions
Un code de révision du manuel s’affiche sous forme de suffixe à côté du numéro du catalogue, sur la couverture du manuel.
/i
Code de révision Date Contenu de la révision
01 Août 2006 Original
02 Octobre 2006 Mise à jour DeviceNet
03 Mai 2007 Mise à jour avec les cartes TJ1-MC04 et TJ1-ML04.
Mise à jour avec des informations générales sur le système Trajexia et avec des caractéristiques générales de Trajexia.
Révision 3.0
GUIDE DE DÉMARRAGE RAPIDE 47
 Loading...
Loading...