

Page 1

Cat. No.
I51E-ES-03
Sistema Motion Control Trajexia
TJ1-MC04, TJ1-MC16, TJ1-ML04, TJ1-ML16, TJ1-PRT, TJ1-DRT, TJ1-FL02
MANUAL DE REFERENCIA DE HARDWARE
Page 2
Nota
Los productos OMRON se fabrican para su uso conforme a procedimientos
adecuados, por un operador cualificado, y sólo para el fin descrito en este
manual.
Las convenciones que aparecen a continuación se utilizan para indicar
y clasificar las precauciones que aparecen en este manual. Preste atención
siempre a la información que aparece en ellas. Su incumplimiento podría
conllevar lesiones físicas o daños materiales.
Definición de información preventiva
PELIGRO
Indica una situación de peligro inmediato que, de no evitarse,
puede ocasionar la muerte o lesiones graves.
ADVERTENCIA
Indica una situación de peligro potencial que, de no evitarse,
puede ocasionar la muerte o lesiones graves.
/i
Precaución
Indica una situación potencialmente peligrosa que, de no evitarse,
puede ocasionar lesiones físicas o daños materiales menores
o moderados.
Marcas comerciales y copyrights
PROFIBUS es una marca registrada de PROFIBUS International.
MECHATROLINK es una marca registrada de Yaskawa Corporation.
DeviceNet es una marca registrada de Open DeviceNet Vendor Assoc INC.
CIP es una marca registrada de Open DeviceNet Vendor Assoc INC.
Revisión 3.0
Trajexia es una marca registrada de OMRON.
Motion Perfect es una marca registrada de Trio Motion Technology Ltd.
MANUAL DE REFERENCIA DE HARDWARE 2
© OMRON, 2007
Reservados todos los derechos. Se prohíbe la reproducción, almacenamiento en sistemas
de recuperación o transmisión total o parcial, por cualquier forma o medio (mecánico,
electrónico, fotocopiado, grabación u otros) sin la previa autorización por escrito de OMRON.
No se asume responsabilidad alguna con respecto al uso de la información contenida
en el presente manual. Asimismo, dado que OMRON mantiene una política de constante
mejora de sus productos de alta calidad, la información contenida en el presente manual
está sujeta a modificaciones sin previo aviso. En la preparación de este manual se han
adoptado todas las precauciones posibles. No obstante, OMRON no se hace responsable
de ningún error u omisión. Tampoco se hace responsable de los posibles daños resultantes
del uso de la información contenida en esta publicación.
Page 3
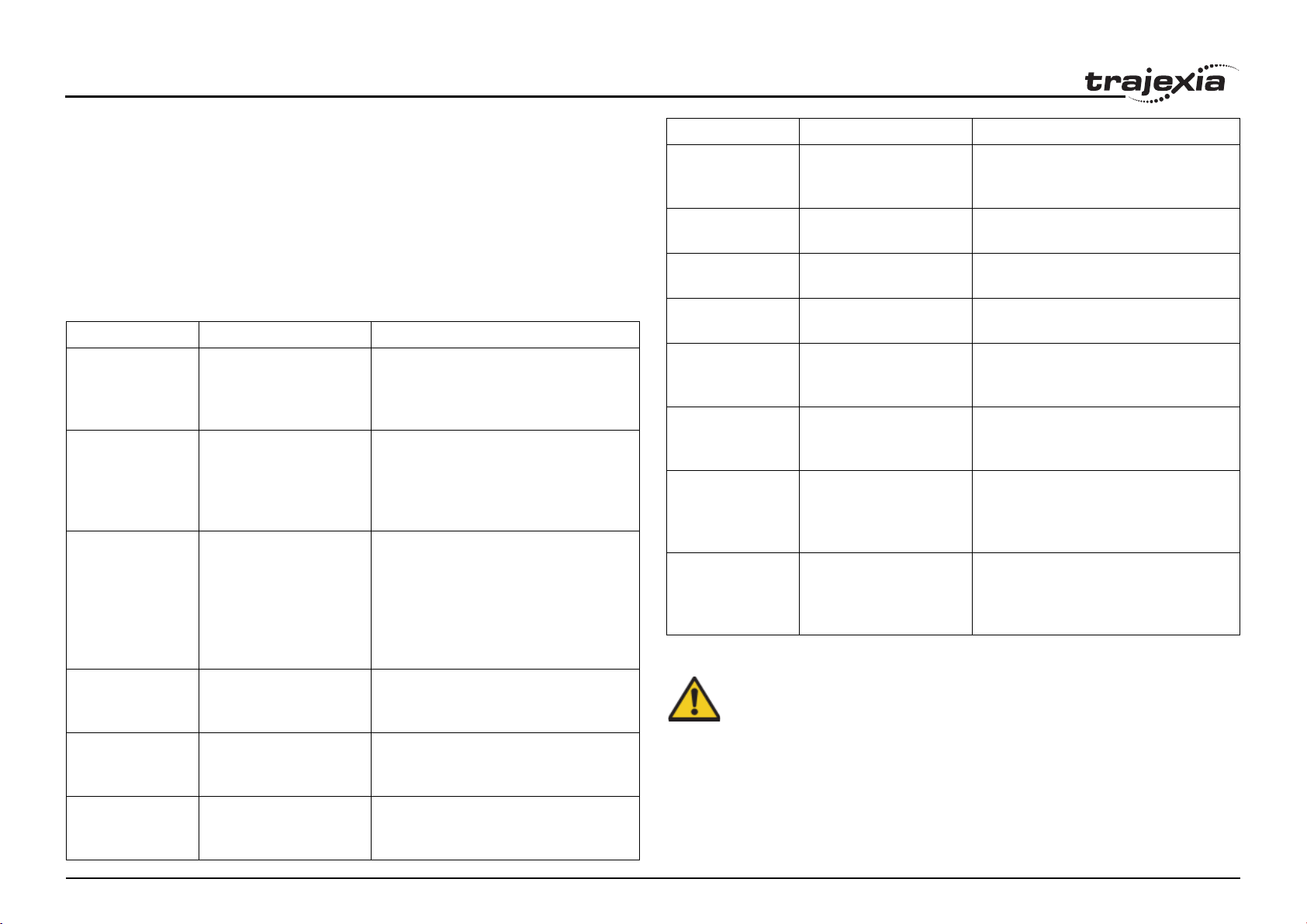
Acerca de este manual
Nombre Cat. No. Contenido
En este manual se describen la instalación y la operación del sistema
Motion Control Trajexia.
Antes de intentar instalar o utilizar las unidades Motion Control Trajexia,
se recomienda leer detenidamente el presente manual, así como toda
la documentación afín relacionada en la tabla, con el objeto de familiarizarse
perfectamente con la información facilitada. Asegúrese de leer las
precauciones presentadas en la siguiente sección.
/i
Nombre Cat. No. Contenido
Sistema Motion
Control Trajexia
GUÍA RÁPIDA
DE REFERENCIA
MANUAL DE
REFERENCIA
DE HARDWARE
del sistema Motion
Control Trajexia
Sistema Motion
Control Trajexia
MANUAL DE
PROGRAMACIÓN
Manual
del servodriver
Sigma-II
Manual
del servodriver
de la serie JUNMA
Revisión 3.0
Manual
de JUSP-NS115
I50E Se describe cómo familiarizarse
rápidamente con Trajexia en una
configuración de prueba para mover
un solo eje con MECHATROLINK-II.
I51E Se describen la instalación y las
especificaciones de hardware de
las unidades Trajexia y se explica
la filosofía del sistema Trajexia.
I52E Se describen los comandos BASIC
que se utilizan para la programación
de Trajexia, se explican los protocolos
de comunicaciones y el software
Trajexia, se ofrecen ejemplos prácticos
e información para la detección
y corrección de errores.
SIEP S800000 15 Se describen la instalación y la operación
de los servodrivers Sigma-II.
TOEP-C71080603 01-OY Se describen la instalación y la operación
de los servodrivers JUNMA.
SIEP C71080001 Se describen la instalación y la operación
del módulo de aplicación de
MECHATROLINK-II.
Manual de interfaz
de Sigma-III con
MECHATROLINK
Variador V7 TOEP C71060605 02-OY Se describen la instalación y la operación
Variador F7Z TOE S616-55 1-OY Se describen la instalación y la operación
Variador G7 TOE S616-60 Se describen la instalación y la operación
Interfaz
MECHATROLINK
SI-T para G7 y F7
Interfaz
MECHATROLINK
ST-T/V7 para V7
Módulos de E/S
MECHATROLINK
Comandos
de comunicaciones
de SYSMAC
series CS/CJ
SIEP S800000 11
SIBP-C730600-08 Se describen la instalación y la operación
SIBP-C730600-03 Se describen la instalación y la operación
SIE C887-5 Se describen la instalación y la operación
W342 Se describen el protocolo
Se describen la instalación y la operación
de los servodrivers Sigma-III con interfaz
MECHATROLINK
de los variadores V7
de los variadores F7Z
de los variadores G7
de las interfaces MECHATROLINK para
los variadores G7 y F7
de las interfaces MECHATROLINK para
los variadores V7
de los módulos de entrada y salida
MECHATROLINK y el repetidor
MECHATROLINK-II
de comunicaciones FINS
y los comandos FINS
ADVERTENCIA
Asegúrese de leer y comprender la información incluida
en este manual; en caso contrario, pueden producirse daños
personales o incluso la muerte, daños en el producto o fallos
del mismo. Antes de iniciar cualquiera de los procedimientos
y las operaciones indicadas, lea cada sección en su totalidad
y asegúrese de comprender toda la información incluida
en ella y en las secciones relacionadas.
MANUAL DE REFERENCIA DE HARDWARE 3
Page 4
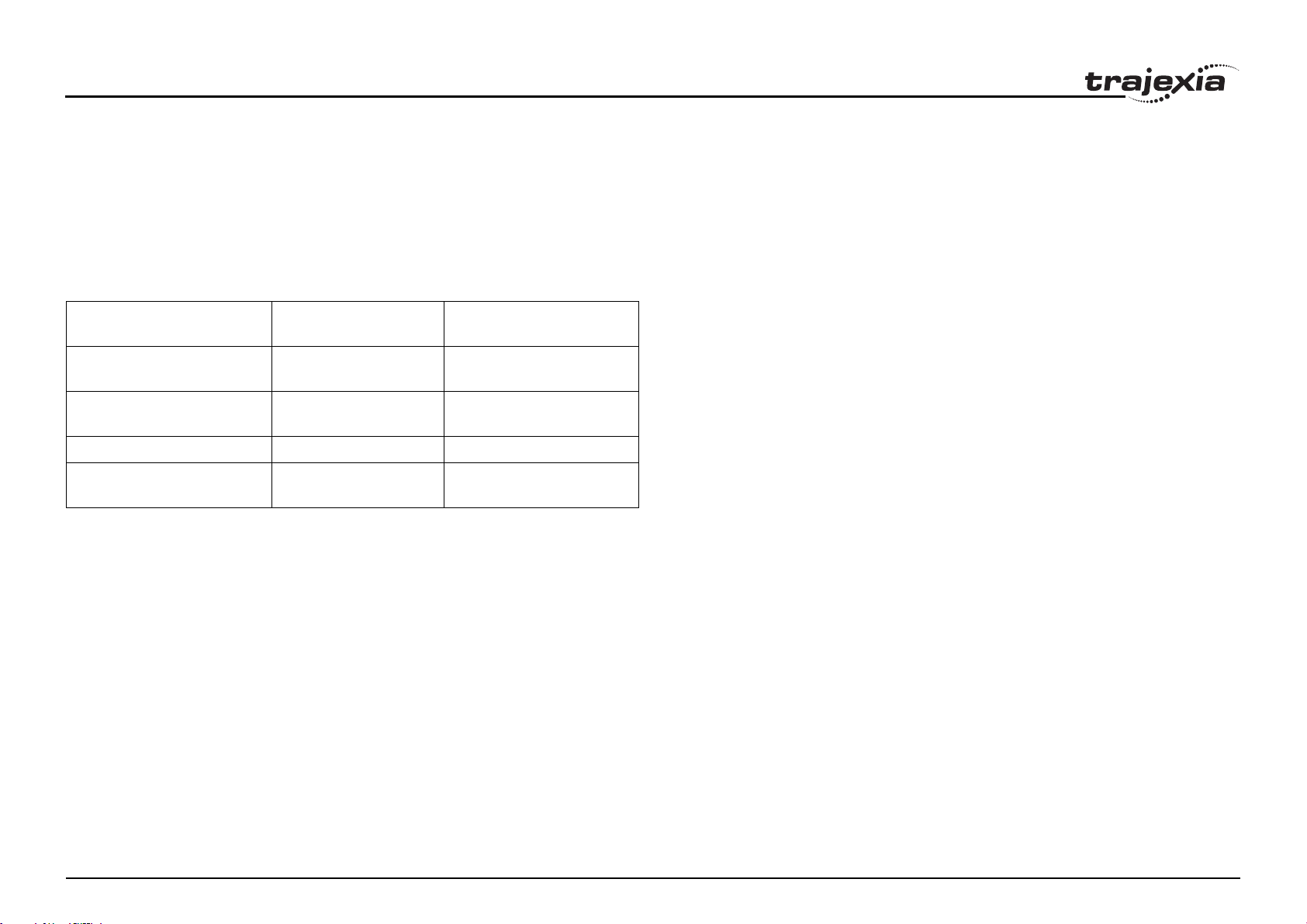
Funciones compatibles por versiones de unidad
Durante el desarrollo de Trajexia, se ha incorporado nuevas funciones
a la unidad controladora después de su lanzamiento al mercado.
Estas funciones están implementadas en el firmware y FPGA de la unidad
controladora.
En la tabla siguiente se muestra un resumen de las funciones correspondientes
en relación con la versión de firmware y FPGA de TJ1-MC__.
/i
Funcionalidad Versión de firmware
de TJ1-MC__
Compatibilidad completa
con TJ1-FL02
Compatibilidad con comandos
BASIC FINS_COMMS
Compatibilidad con TJ1-DRT V1.6509 Todas las versiones
Compatibilidad con TJ1-MC04
y TJ1-ML04
V1.6509 21 y superior
V1.6509 Todas las versiones
V1.6607 21 y superior
Versión de FPGA
de TJ1-MC__
Compruebe las versiones de firmware y FPGA de TJ1-MC__
Conecte TJ1-MC__ al software Trajexia Tools. Consulte el manual
de programación.
Abra la ventana de terminal y escriba los siguientes comandos:
Escriba
PRINT VERSION en la ventana de terminal. El parámetro de versión
devuelve el número de versión de firmware actual del controlador Motion.
Escriba
PRINT FPGA_VERSION SLOT(-1) en la ventana de terminal.
El parámetro de versión devuelve el número de versión de FPGA actual
de TJ1-MC__.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 4
Page 5
Contenidos
1 Advertencias y precauciones de seguridad...............................................................................................................................................8
1.1 Perfil de usuario................................................................................................................................................................................................................................8
1.2 Precauciones generales ...................................................................................................................................................................................................................8
1.3 Precauciones de seguridad ..............................................................................................................................................................................................................8
1.4 Precauciones del entorno de servicio...............................................................................................................................................................................................9
1.5 Precauciones de uso ......................................................................................................................................................................................................................10
1.6 Precauciones de montaje de la unidad...........................................................................................................................................................................................13
1.7 Conformidad con las Directivas CE ................................................................................................................................................................................................13
1.7.1 Conceptos ........................................................................................................................................................................................................................13
1.7.2 Compatibilidad con las Directivas CE...............................................................................................................................................................................13
2 Filosofía del sistema...................................................................................................................................................................................14
2.1 Introducción ....................................................................................................................................................................................................................................14
2.2 Conceptos de Motion Control .........................................................................................................................................................................................................16
2.2.1 Control PTP......................................................................................................................................................................................................................17
2.2.2 Control CP........................................................................................................................................................................................................................20
2.2.3 Control EG........................................................................................................................................................................................................................22
2.2.4 Otras operaciones ............................................................................................................................................................................................................25
2.3 Principios de servosistema .............................................................................................................................................................................................................27
2.4 Arquitectura del sistema Trajexia ...................................................................................................................................................................................................30
2.5 Tiempo de ciclo...............................................................................................................................................................................................................................31
2.6 Control del programa y multitarea ..................................................................................................................................................................................................37
2.7 Secuencia de movimiento y ejes ....................................................................................................................................................................................................40
2.7.1 Generador de perfil...........................................................................................................................................................................................................41
2.7.2 Lazo de posición...............................................................................................................................................................................................................41
2.7.3 Secuencia de eje..............................................................................................................................................................................................................41
2.7.4 Tipo de eje........................................................................................................................................................................................................................41
2.8 Búferes de movimiento ..................................................................................................................................................................................................................48
2.9 Sistema mecánico ..........................................................................................................................................................................................................................50
3 Referencia de hardware .............................................................................................................................................................................51
3.1 Introducción ....................................................................................................................................................................................................................................51
3.1.1 Aspectos destacados de Trajexia.....................................................................................................................................................................................52
3.1.2 Trajexia Tools...................................................................................................................................................................................................................53
3.1.3 Este manual......................................................................................................................................................................................................................53
3.2 Todas las unidades ........................................................................................................................................................................................................................54
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 5
3.2.1 Instalación del sistema ....................................................................................................................................................................................................54
3.2.2 Condiciones ambientales y de almacenamiento para todas las unidades .......................................................................................................................61
3.2.3 Dimensiones de las unidades...........................................................................................................................................................................................62
3.2.4 Cableado de los conectores Weidmüller..........................................................................................................................................................................64
Page 6
Contenidos
3.3 Fuente de alimentación ..................................................................................................................................................................................................................66
3.3.1 Introducción......................................................................................................................................................................................................................66
3.3.2 Conexiones de fuente de alimentación ............................................................................................................................................................................66
3.3.3 Especificaciones de la fuente de alimentación.................................................................................................................................................................67
3.3.4 Contenido de la caja de la fuente de alimentación...........................................................................................................................................................67
3.4 TJ1-MC__ .......................................................................................................................................................................................................................................68
3.4.1 Introducción......................................................................................................................................................................................................................68
3.4.2 Display de LEDs...............................................................................................................................................................................................................69
3.4.3 Conexiones de la TJ1-MC__............................................................................................................................................................................................70
3.4.4 Batería..............................................................................................................................................................................................................................76
3.4.5 Especificaciones de TJ1-MC__........................................................................................................................................................................................77
3.4.6 TJ1-TER ...........................................................................................................................................................................................................................78
3.4.7 Contenido de la caja de TJ1-MC__..................................................................................................................................................................................78
3.5 TJ1-ML__........................................................................................................................................................................................................................................79
3.5.1 Introducción......................................................................................................................................................................................................................79
3.5.2 Descripción de LED..........................................................................................................................................................................................................80
3.5.3 Conexión de TJ1-ML__ ....................................................................................................................................................................................................80
3.5.4 Especificaciones de TJ1-ML__.........................................................................................................................................................................................84
3.5.5 Contenido de la caja de TJ1-ML__...................................................................................................................................................................................85
3.5.6 Servodrivers MECHATROLINK-II de la serie Sigma-II.....................................................................................................................................................85
3.5.7 Servodrivers MECHATROLINK-II de la serie Junma .......................................................................................................................................................92
3.5.8 Variador V7 MECHATROLINK-II .....................................................................................................................................................................................98
3.5.9 Variadores F7 y G7 MECHATROLINK-II........................................................................................................................................................................102
3.5.10 Esclavos de E/S digitales MECHATROLINK-II .............................................................................................................................................................107
3.5.11 Módulo de entradas analógicas de 4 canales MECHATROLINK-II ...............................................................................................................................117
3.5.12 Módulo de salidas analógicas de 2 canales MECHATROLINK-II ..................................................................................................................................123
3.5.13 Repetidor MECHATROLINK-II .......................................................................................................................................................................................128
3.6 TJ1-PRT .......................................................................................................................................................................................................................................131
3.6.1 Introducción....................................................................................................................................................................................................................131
3.6.2 Descripción de LEDs......................................................................................................................................................................................................131
3.6.3 Selectores de número de nodo ......................................................................................................................................................................................132
3.6.4 Conexiones de TJ1-PRT ................................................................................................................................................................................................132
3.6.5 Especificaciones de TJ1-PRT .......................................................................................................................................................................................133
3.6.6 Contenido de la caja de TJ1-PRT ..................................................................................................................................................................................133
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 6
Page 7
Contenidos
3.7 TJ1-DRT .......................................................................................................................................................................................................................................134
3.7.1 Introducción....................................................................................................................................................................................................................134
3.7.2 Descripción de LEDs .....................................................................................................................................................................................................134
3.7.3 Selectores de número de nodo ......................................................................................................................................................................................135
3.7.4 Conexiones de TJ1-DRT................................................................................................................................................................................................136
3.7.5 Especificaciones de TJ1-DRT ........................................................................................................................................................................................137
3.7.6 Contenido de la caja de TJ1-DRT ..................................................................................................................................................................................137
3.8 TJ1-FL02 ......................................................................................................................................................................................................................................138
3.8.1 Introducción....................................................................................................................................................................................................................138
3.8.2 Descripción de LED........................................................................................................................................................................................................139
3.8.3 Conexiones de TJ1-FL02 ...............................................................................................................................................................................................140
3.8.4 Especificaciones de TJ1-FL02 .......................................................................................................................................................................................146
3.8.5 Encoder incremental.......................................................................................................................................................................................................147
3.8.6 Encoder absoluto............................................................................................................................................................................................................149
3.8.7 Motor paso a paso..........................................................................................................................................................................................................153
3.8.8 Registro ..........................................................................................................................................................................................................................153
3.8.9 Interruptor de posición de hardware...............................................................................................................................................................................154
3.8.10 Contenido de la caja de TJ1-FL02 .................................................................................................................................................................................154
A Diferencias entre Sigma-II y Junma ........................................................................................................................................................162
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 7
Page 8
Advertencias y precauciones de seguridad
1 Advertencias y precauciones de seguridad
1.1 Perfil de usuario
Este manual está dirigido al personal con conocimientos de sistemas
eléctricos (ingenieros eléctricos o equivalentes) que estén encargados
del diseño, instalación y gestión de los sistemas e instalaciones
de automatización industrial.
ADVERTENCIA
El usuario debe tomar medidas de protección a prueba
de fallos para garantizar la seguridad en caso de que no
se reciban señales o que éstas sean incorrectas o anómalas
debido a cortes momentáneos de corriente u otras causas.
En caso de no hacerlo pueden producirse graves accidentes.
1.2 Precauciones generales
El usuario debe utilizar el producto con arreglo a las especificaciones
de rendimiento descritas en este manual.
Consulte a su representante de OMRON antes de utilizar el producto
en alguna situación no contemplada en este manual o de emplearlo en
sistemas de control nuclear, sistemas ferroviarios, sistemas de aviación,
vehículos, equipos de seguridad, plantas petroquímicas y otros sistemas,
máquinas o equipos que puedan tener una repercusión grave en vidas
o propiedades en caso de uso incorrecto.
1.3 Precauciones de seguridad
ADVERTENCIA
No intente desmontar la unidad ni toque ninguna de las piezas
internas mientras esté conectada la alimentación.
Esto podría provocar una descarga eléctrica.
ADVERTENCIA
No toque ningún terminal o bloque de terminales mientras
esté conectada la alimentación.
En caso contrario podrían producirse descargas eléctricas.
ADVERTENCIA
Revisión 3.0
Bajo ninguna circunstancia cortocircuite los terminales positivo
y negativo de las baterías, ni cargue, desarme, deforme, aplique
presión ni queme las baterías.
Las baterías pueden explotar, quemarse o derramar líquido.
ADVERTENCIA
El usuario deberá instalar por su cuenta circuitos de parada
de emergencia, de bloqueo y de limitación, así como otras
medidas de seguridad similares, en circuitos externos
(es decir, no en el controlador Motion Trajexia).
En caso de no hacerlo pueden producirse graves accidentes.
ADVERTENCIA
Cuando la salida de 24 Vc.c. (fuente de alimentación de E/S
de TJ1) esté sobrecargada o cortocircuitada, puede producirse
una caída de tensión que provoque la desconexión de las salidas.
Para evitar dichos problemas, deben incorporarse al sistema
medidas de prevención externas que garanticen la seguridad.
ADVERTENCIA
Las salidas de TJ1 se desconectarán debido a la sobrecarga
de los transistores de salida (protección). Para evitar dichos
problemas, deben incorporarse al sistema medidas de prevención
externas que garanticen la seguridad.
ADVERTENCIA
TJ1 desconectará WDOG cuando su función de autodiagnóstico
detecte un error. Para evitar dichos problemas, deben
incorporarse al sistema medidas de prevención externas
que garanticen la seguridad.
MANUAL DE REFERENCIA DE HARDWARE 8
Page 9
Advertencias y precauciones de seguridad
Revisión 3.0
ADVERTENCIA
Con el objeto de garantizar la seguridad del sistema en caso
de producirse una anomalía como consecuencia de un
funcionamiento incorrecto de TJ1 o de cualquier otro factor
externo que afecte a éste, incorpore a los circuitos externos,
es decir no al controlador Motion Trajexia (denominado “TJ1”),
medidas de seguridad.
En caso de no hacerlo pueden producirse graves accidentes.
ADVERTENCIA
No intente desarmar, reparar o modificar ninguna unidad.
Cualquier intento de hacerlo puede provocar desperfectos,
descargas eléctricas e incluso incendios.
Precaución
Compruebe las condiciones de seguridad de la unidad
de destino antes de transferir un programa a otra unidad
o de editar la memoria.
La realización de cualquiera de estos procesos sin confirmar
las condiciones de seguridad puede provocar lesiones.
Precaución
No se realizará una copia de seguridad de los programas
de usuario escritos para la unidad Motion Control en la memoria
flash de TJ1 (función de memoria flash).
Precaución
Preste especial atención a la polaridad (+/–) al cablear la fuente
de alimentación de c.c. Una conexión errónea puede provocar
un funcionamiento incorrecto del sistema.
Precaución
Apriete los tornillos del bloque de terminales de la fuente de
alimentación de c.a. al par de apriete especificado en este manual.
Los tornillos flojos pueden provocar incendios o un funcionamiento
incorrecto.
1.4 Precauciones del entorno de servicio
Precaución
No utilice la unidad en ninguno de los siguientes lugares.
Esto podría provocar un funcionamiento incorrecto, descargas
eléctricas o incendios.
- Lugares expuestos a la luz directa del sol.
- Lugares expuestos a temperaturas o grados de humedad
fuera de los rangos determinados en las especificaciones.
- Lugares expuestos a condensación como resultado
de cambios drásticos de temperatura.
- Lugares expuestos a gases corrosivos o inflamables.
- Lugares con altas cantidades de polvo (especialmente
polvo de hierro) o sal.
- Lugares expuestos al contacto con agua, aceite o productos
químicos.
- Lugares sometidos a golpes o vibraciones.
Precaución
En el momento de realizar instalaciones en los siguientes lugares,
adopte las suficientes medidas de seguridad.
Unas medidas inadecuadas o insuficientes pueden provocar
un funcionamiento incorrecto.
- Lugares expuestos a electricidad estática u otras formas de ruido.
- Lugares expuestos a fuertes campos electromagnéticos.
- Lugares expuestos a una posible radioactividad.
- Lugares cercanos a fuentes de alimentación.
MANUAL DE REFERENCIA DE HARDWARE 9
Page 10
Advertencias y precauciones de seguridad
Precaución
El entorno de servicio del sistema TJ1 puede tener un efecto
muy importante en la vida útil y en la fiabilidad del sistema.
Los entornos de funcionamiento inadecuados pueden provocar
un funcionamiento incorrecto, averías y otros problemas
imprevistos en el sistema TJ1.
Asegúrese de que el entorno de funcionamiento cumple
las condiciones especificadas, tanto durante la instalación
como durante toda la vida del sistema.
1.5 Precauciones de uso
ADVERTENCIA
No arranque el sistema hasta que haya comprobado
que los ejes están presentes y son del tipo correcto.
Los números de los ejes flexibles cambiarán si se producen
errores de la red MECHATROLINK-II durante el arranque
o si cambia la configuración de dicha red.
ADVERTENCIA
Asegúrese de que el programa del usuario puede ejecutarse
correctamente antes de ejecutarlo en la unidad.
De lo contrario puede producirse un funcionamiento imprevisto.
Precaución
Adopte las medidas apropiadas para garantizar que se suministra
la alimentación con la tensión y frecuencia nominal especificada.
Tenga especial cuidado en lugares en los que la alimentación
eléctrica sea inestable.
Una alimentación inapropiada puede provocar un funcionamiento
incorrecto.
Precaución
Instale disyuntores externos y tome otras medidas de seguridad
frente a cortocircuitos en cableados externos.
En caso de que no se tomen las suficientes medidas de seguridad
para prevenir cortocircuitos, puede producirse un incendio.
Precaución
No aplique a las unidades de entrada una tensión superior
a la tensión nominal de entrada.
Un exceso de tensión puede provocar un incendio.
Precaución
No aplique tensión ni conecte cargas a las unidades de salida
que superen la capacidad de conmutación máxima.
Los excesos de tensión o de carga pueden provocar incendios.
Precaución
Utilice siempre la tensión de alimentación indicada
en este manual.
Una tensión incorrecta puede provocar un funcionamiento
Precaución
Durante la realización de pruebas de tensión no disruptiva,
desconecte el terminal de puesta a tierra funcional.
De lo contrario, puede producirse un incendio.
incorrecto o un incendio.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 10
Page 11
Advertencias y precauciones de seguridad
Precaución
Al instalar las unidades, conéctelas siempre a una toma de tierra
de clase 3 (hasta 100Ω o menos).
El no conectar a una toma de tierra de clase 3 puede provocar
descargas eléctricas.
Precaución
Desconecte siempre la alimentación del sistema antes
de proceder a realizar cualquiera de las siguientes tareas.
De lo contrario, puede producirse un funcionamiento incorrecto
o descargas eléctricas.
- Montaje o desmontaje de las unidades expansoras,
CPUs u otras unidades.
- Ensamblado de las unidades.
- Configuración de los interruptores DIP o de los interruptores
rotativos.
- Conexión de cables o cableado.
- Conexión o desconexión de los conectores.
Precaución
Asegúrese de que todos los tornillos de montaje, de terminal
y del conector de cable están apretados al par especificado
en este manual.
El uso de un par inapropiado puede provocar un funcionamiento
incorrecto.
Precaución
Una vez concluido el cableado, retire la etiqueta de protección
al polvo para permitir una adecuada disipación térmica.
Dejar la etiqueta de protección al polvo pegada puede provocar
un funcionamiento incorrecto.
Precaución
Utilice terminales de crimpar para el cableado. No conecte
cables trenzados pelados directamente a los terminales.
La conexión de cables trenzados desnudos puede provocar
un incendio.
Precaución
Antes de conectar la alimentación eléctrica, vuelva a comprobar
el cableado.
Un cableado incorrecto puede provocar un incendio.
Precaución
Realice un cableado correcto.
Un cableado incorrecto puede provocar un incendio.
Precaución
Monte la unidad sólo después de haber comprobado
exhaustivamente el bloque de terminales.
Precaución
Durante el cableado, deje pegada la etiqueta de protección
al polvo a la unidad.
Si se quita la etiqueta de protección al polvo puede provocar
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 11
un funcionamiento incorrecto.
Precaución
Asegúrese de que los bloques de terminales, los cables
de expansión y demás elementos con dispositivos de bloqueo
están situados adecuadamente.
De lo contrario, podría producirse un funcionamiento incorrecto.
Page 12
Advertencias y precauciones de seguridad
Revisión 3.0
Precaución
Confirme que no se producirá ningún efecto negativo adverso
en el sistema antes de cambiar el modo de operación del sistema.
En caso de no hacerlo, puede producirse un funcionamiento
imprevisto.
Precaución
Reanude el funcionamiento sólo cuando haya transferido
a la nueva CPU el contenido de la memoria de VR y tabla
necesaria para el funcionamiento.
En caso de no hacerlo, puede producirse un funcionamiento
imprevisto.
Precaución
Cuando sustituya alguna pieza, asegúrese de comprobar
que los valores nominales de la nueva pieza sea la correcta.
De lo contrario podría producirse un funcionamiento incorrecto
o un incendio.
Precaución
No tire de los cables ni los doble más allá de sus límites naturales.
Los cables podrían romperse.
Precaución
Antes de tocar el sistema, toque antes un objeto metálico
conectado a tierra para descargarse de la electricidad estática
que pudiera haber acumulado.
De lo contrario, se podría producir un funcionamiento incorrecto
o daños.
Precaución
Los cables UTP no están apantallados. En los entornos expuestos
a ruidos, utilice un sistema cable de par trenzado apantallado
(STP) y concentradores adecuados para un entorno FA.
No instale cables de par trenzado con líneas de alta tensión.
No instale cables de par trenzado cerca de dispositivos que
generen ruido.
No instale cables de par trenzado en lugares que estén expuestos
a altos niveles de humedad.
No instale cables de par trenzado en lugares que estén expuestos
a polvo y suciedad excesivos o a vapores de grasa u otros
contaminantes.
Precaución
Utilice cables de conexión dedicados, según lo especificado
en los manuales de operación, para conectar las unidades.
El uso de cables RS-232C estándar para ordenador puede
provocar fallos en los dispositivos externos o la unidad
de Motion Control.
Precaución
Las salidas pueden permanecer conectadas debido
a un funcionamiento incorrecto de las salidas transistor
incorporadas u otros circuitos internos.
Para evitar dichos problemas, deben incorporarse al sistema
medidas de prevención externas que garanticen la seguridad.
Precaución
TJ1 comenzará a funcionar en modo RUN cuando se conecte
la alimentación y si un programa BASIC está configurado
en modo de ejecución automática.
MANUAL DE REFERENCIA DE HARDWARE 12
Page 13
Advertencias y precauciones de seguridad
1.6 Precauciones de montaje de la unidad
Precaución
Instale la unidad correctamente.
Una instalación incorrecta de la unidad puede provocar
un funcionamiento incorrecto.
Precaución
Asegúrese de montar la TJ1-TER incluida con la
TJ1-MC__ en la unidad instalada más a la derecha.
A menos que la TJ1-TER se monte correctamente,
la TJ1 no funcionará de forma adecuada.
1.7 Conformidad con las Directivas CE
1.7.1 Conceptos
Los conceptos de las directivas sobre CEM y baja tensión son los siguientes:
Directivas sobre CEM
Los dispositivos OMRON compatibles con las Directivas CE también son
compatibles con los estándares sobre Compatibilidad Electromagnética
(CEM) afines, lo que permite integrarlos con mayor facilidad en otros
dispositivos o máquinas. Se ha comprobado la conformidad con
los estándares sobre EMC de los productos reales. No obstante,
es responsabilidad del cliente comprobar que los productos cumplen
los estándares en los sistemas que utilice.
El cumplimiento de las disposiciones relativas a la CEM de los dispositivos
OMRON compatibles con las Directivas CE puede variar en función
de la configuración, el cableado y demás condiciones del equipo o panel
de control en el que se instalen los dispositivos OMRON. Por lo tanto, será
responsabilidad del cliente realizar la comprobación final que confirme que
Revisión 3.0
los dispositivos y el equipo industrial son compatibles con los estándares
sobre CEM.
Directivas de Baja Tensión
Debe asegurarse siempre de que los dispositivos que funcionen
con tensiones entre 50 y 1.000 Vc.a., y entre 75 y 1.500 Vc.c., cumplen
los estándares de seguridad necesarios.
1.7.2 Compatibilidad con las Directivas CE
Los controladores Motion Trajexia cumplen las Directivas CE.
Para garantizar que la máquina o el dispositivo en el que se utiliza
un sistema cumple las directivas CE, el sistema debe estar instalado
del siguiente modo:
1. El sistema debe instalarse dentro de un panel de control.
2. Las fuentes de alimentación de c.c. utilizadas para comunicaciones
y las E/S deben protegerse con un aislamiento reforzado o doble.
MANUAL DE REFERENCIA DE HARDWARE 13
Page 14
Filosofía del sistema
2 Filosofía del sistema
2.1 Introducción
La filosofía del sistema se centra en la relación entre:
• Arquitectura del sistema
• Tiempo de ciclo
• Control del programa y multitarea
• Secuencia de movimiento y ejes
• Búferes de movimiento
Es necesario entender de forma clara la relación entre estos
conceptos para obtener los mejores resultados para el sistema
Trajexia.
2.1.1 Glosario
Secuencia de movimiento
La secuencia de movimiento es la encargada de controlar
la posición de los ejes.
Período de servo
Define la frecuencia a la que se ejecuta la secuencia
de movimiento. El período de servo se debe ajustar según
la configuración de los ejes físicos. Los ajustes disponibles
son 0,5 ms, 1 ms ó 2 ms.
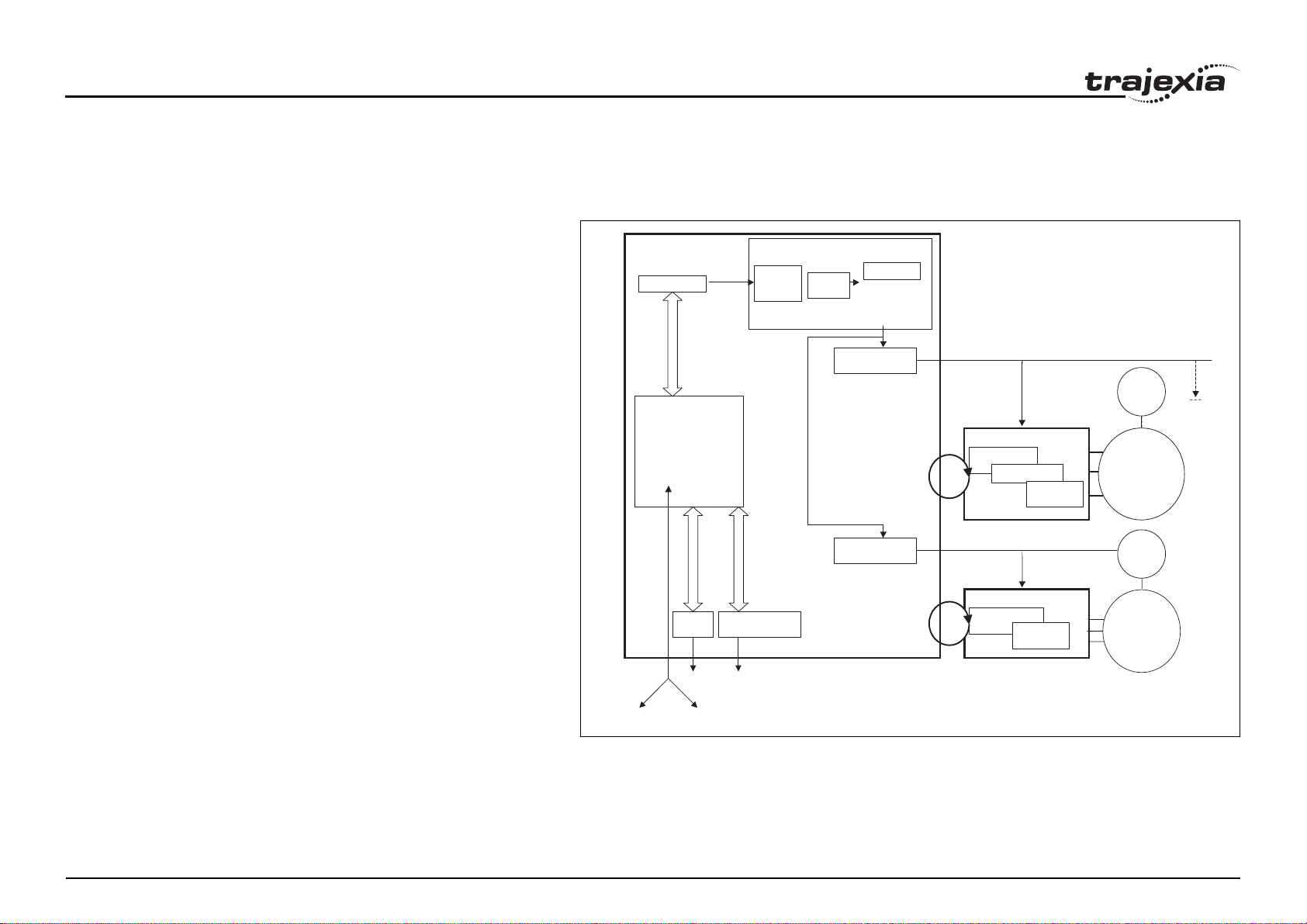
TJ1-MC16
Búfer de programa
PROGRAMAS BASIC
Proceso 1
Proceso 2
Proceso 3
…
Proceso 14
Comuni-
caciones
E/S MC
Ethernet
FINS
Búfer y
Búfer y
generador
generador
de perfil
de perfil
TJ1-PRT
LAZO DE CONTROL DE EJE
TIPO DE EJE
TIPO DE EJE
Lazo
de posición
TIPO DE EJE
TJ1-ML16
-
TJ1 FL02
fig. 1
Servodriver.
Lazo de posición
Lazo de velocidad
Lazo de velocidad
Servodriver.
Lazo de velocidad
Lazo de par
Lazo
Lazo de par
de par
ENC
MOTOR
ENC
MOTOR
Todos los
demás
servodrivers
Ethernet
Tiempo de ciclo
Se trata del tiempo necesario para ejecutar un ciclo completo
de operaciones en la TJ1-MC__. El tiempo de ciclo se divide
INTEGRADA TJ1-ML16
Profibus
A través de
en cuatro períodos de igual duración denominados “tareas
de CPU”. El tiempo de ciclo es de 1 ms si SERVO_PERIOD
es 0,5 ms ó 1 ms y de 2 ms si SERVO_PERIOD es 2 ms.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 14
Page 15
Filosofía del sistema
Tareas de CPU
Las operaciones ejecutadas en cada tarea de CPU:
Tarea de CPU Operación
Primera tarea de CPU Secuencia de movimiento
Proceso de prioridad baja
Segunda tarea de CPU Proceso de prioridad alta
Tercera tarea de CPU Secuencia de movimiento
(sólo si SERVO_PERIOD = 0,5 ms)
Actualización de LED
Proceso de prioridad alta
Cuarta tarea de CPU Comunicaciones externas
Programa
Un programa es un elemento de código BASIC.
Proceso
Es un programa en ejecución con una determinada prioridad
asignada. Los procesos 0 a 12 son de prioridad baja y los
procesos 13 y 14 son de prioridad alta. En primer lugar,
la prioridad de proceso (alta o baja) y después el número
de proceso (de mayor a menor) definirán la tarea de CPU
a la que se asignará el proceso.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 15
Page 16

Filosofía del sistema
2.2 Conceptos de Motion Control
La TJ1-MC__ ofrece estos tipos de operaciones de control
de posicionamiento:
1. Control punto a punto (PTP)
2. Control de trayectoria continua (CP)
3. Control de reductora electrónica (EG)
En esta sección se presentan algunos de los comandos
y parámetros que se utilizan en la programación en BASIC
de la aplicación de Motion Control.
Sistema de coordenadas
Las operaciones de posicionamiento realizadas por la TJ1-MC__
se basan en un sistema de coordenadas de eje. La TJ1-MC__
convierte los datos de posición del servodriver conectado o del
encoder conectado a un sistema de coordenadas absolutas interno.
La unidad de ingeniería que especifica las distancias de recorrido se
puede definir libremente para cada eje por separado. La conversión
se lleva a cabo mediante el uso del factor de conversión de unidad,
que se define mediante el parámetro de eje
origen del sistema de coordenadas se puede determinar mediante
el comando
DEFPOS
. Este comando redefine la posición actual
en cero o en cualquier otro valor.
UNITS
. El punto de
Un movimiento se define en términos absolutos o relativos.
fig. 2
Un movimiento absoluto lleva el eje (A) a una posición predefinida
específica con respecto al punto de origen. Un movimiento relativo
lleva el eje desde la posición actual a otra que está definida
de forma relativa a esta posición actual. En la figura se muestra
un ejemplo de movimientos lineales relativos (comando MOVE)
y absolutos (comando MOVEABS).
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 16
MOVE(30)
0
MOVEABS(30)
MOVE(60)
MOVEABS(50)
MOVE(50)
50 100
A
Page 17
Filosofía del sistema
2.2.1 Control PTP
En el posicionamiento punto a punto, cada eje se mueve de forma
independiente al otro eje. La TJ1-MC__ admite las siguientes
operaciones:
• Movimiento relativo
• Movimiento absoluto
• Avance continuo
• Retroceso continuo
Movimientos relativos y absolutos
Para mover un solo eje, se utiliza el comando
movimiento relativo o el comando
MOVEABS
absoluto. Cada eje tiene sus propias características de movimiento,
que están definidas por los parámetros de eje.
Supongamos que se ejecuta un programa de control para mover
desde el origen hasta el eje nº 0 (A), coordenada 100, y el eje nº 1 (B),
coordenada 50. Si el parámetro de velocidad se configura de modo
que sea igual para ambos ejes y las velocidades de aceleración
y deceleración se han definido lo suficientemente altas, los
movimientos de los ejes 0 y 1 serán los que se muestran en la figura.
Al arrancar, tanto el eje 0 como el 1 se mueven a la coordenada
50 durante el mismo tiempo. En este punto, el eje 1 se para
y el eje 0 sigue moviéndose hasta la coordenada 100.
MOVE
para un
para un movimiento
fig. 3
B
50
MOVEABS(100) AXIS(0)
MOVEABS(50) AXIS(1)
0
50
100
A
El movimiento de un eje concreto se determina por los parámetros
de eje. Algunos parámetros relevantes son:
/i
Parámetro Descripción
UNITS Factor de conversión de unidad
ACCEL Velocidad de aceleración de un eje en unidades/s
DECEL Velocidad de deceleración de un eje en unidades/s
Revisión 3.0
SPEED Velocidad solicitada de un eje en unidades/s
MANUAL DE REFERENCIA DE HARDWARE 17
2
2
2
Page 18
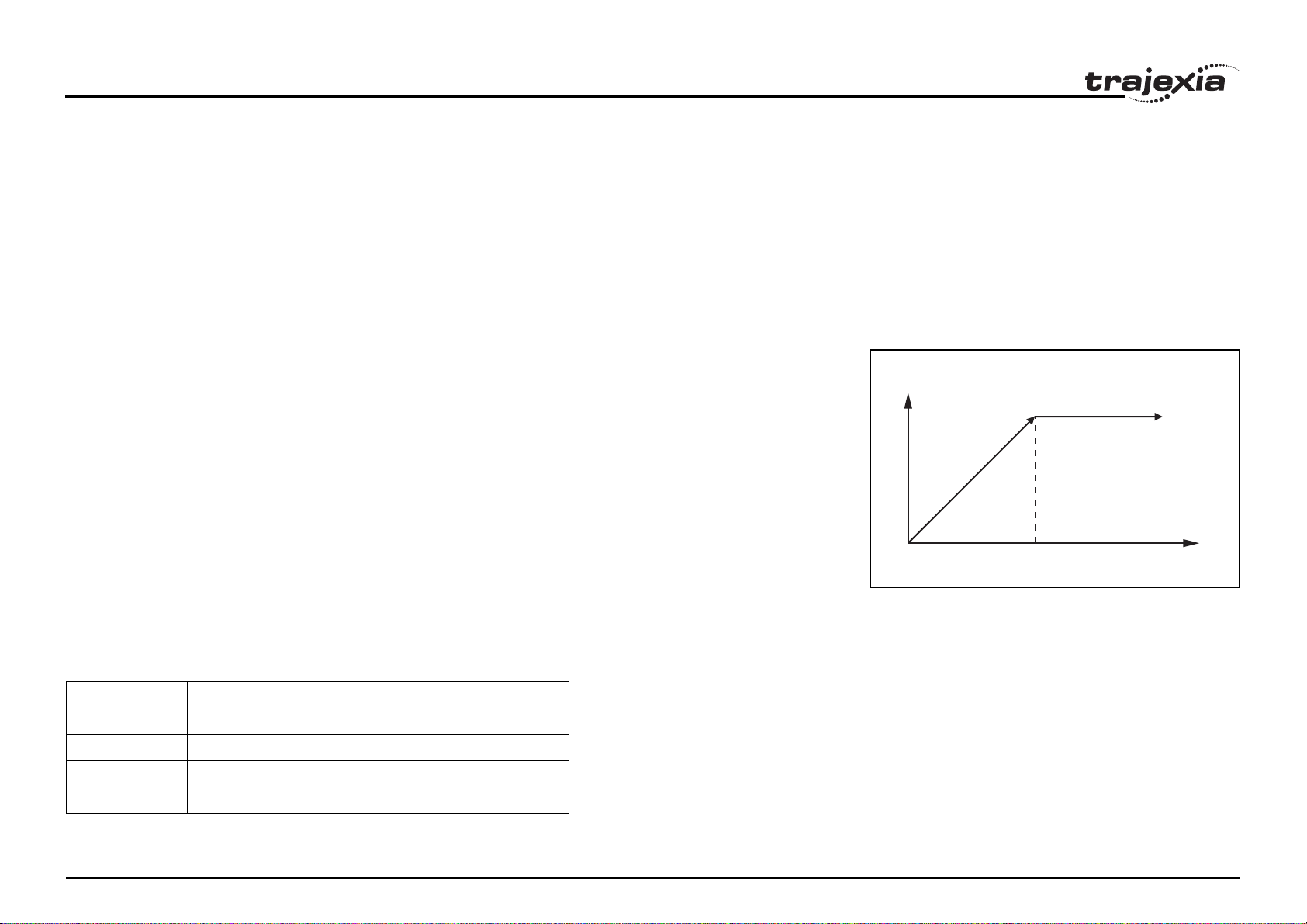
Filosofía del sistema
Definición de movimientos
El perfil de velocidad de esta figura muestra una operación
MOVE
simple. El eje A es el tiempo y el eje B es la velocidad. El parámetro
UNITS
para este eje se ha definido, por ejemplo, como metros.
La velocidad máxima requerida se ha definido en 10 m/s. Para
alcanzar esta velocidad en un segundo y también para decelerar
a la velocidad cero de nuevo en un segundo, la velocidad tanto
de aceleración como de deceleración se ha configurado en 10 m/s
2
La distancia total recorrida es la suma de distancias recorridas
durante los segmentos de aceleración, velocidad constante
y deceleración. Si suponemos que la distancia recorrida por
el comando
MOVE
es 40 m, en la figura se ofrece el perfil
de velocidad.
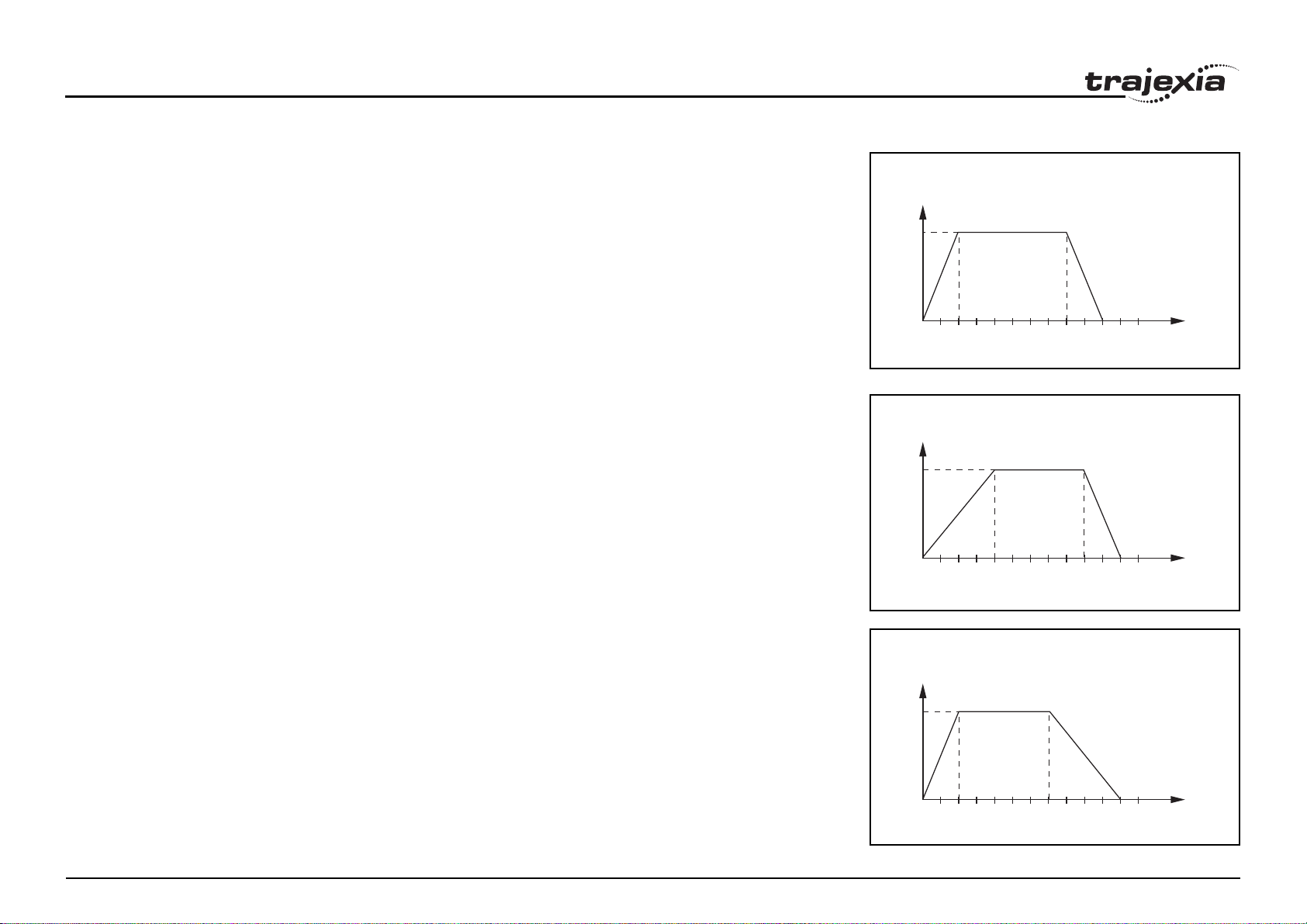
Los dos perfiles de velocidad de estas figuras muestran el mismo
movimiento con un tiempo de aceleración correspondiente
a un tiempo de deceleración de 2 segundos. De nuevo,
el eje A es el tiempo y el eje B es la velocidad.
fig. 4
B
ACCEL=10
10
DECEL=10
SPEED=10
MOVE(40)
.
A
fig. 5
0
123 456
B
ACCEL=5
10
DECEL=10
SPEED=10
MOVE(40)
0
123 456
fig. 6
B
ACCEL=10
10
Revisión 3.0
0
123 456
MANUAL DE REFERENCIA DE HARDWARE 18
DECEL=5
SPEED=10
MOVE(40)
A
A
Page 19
Filosofía del sistema
Cálculos de movimiento
Las ecuaciones siguientes se utilizan para calcular el tiempo
total del movimiento de los ejes.
• La distancia recorrida para el comando MOVE es D.
• La velocidad solicitada es V.
• La velocidad de aceleración es a.
• La velocidad de deceleración es d.
/i
Tiempo de aceleración =
Distancia de aceleración =
Tiempo de deceleración =
Distancia de deceleración =
Distancia de velocidad constante =
Tiempo total =
Movimientos continuos
Los comandos FORWARD y REVERSE se pueden utilizar
para iniciar un movimiento continuo con velocidad constante
en un determinado eje. El comando FORWARD mueve el eje en
dirección positiva y el comando REVERSE en dirección negativa.
Para estos comandos, también se aplican los parámetros de eje
Revisión 3.0
ACCEL y SPEED para especificar la velocidad de aceleración
y la velocidad solicitada.
MANUAL DE REFERENCIA DE HARDWARE 19
Page 20
Filosofía del sistema
Ambos movimientos se pueden cancelar utilizando el comando
CANCEL o RAPIDSTOP. El comando CANCEL cancela
el movimiento de un eje y RAPIDSTOP cancela los movimientos
en todos los ejes. La velocidad de deceleración se establece
mediante DECEL.
2.2.2 Control CP
El control de trayectoria continua permite controlar una trayectoria
especificada entre la posición inicial y final de un movimiento para
uno o varios ejes. La TJ1-MC__ admite las siguientes operaciones:
• Interpolación lineal
• Interpolación circular
• Control CAM.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 20
Page 21
Filosofía del sistema
Interpolación lineal
En determinadas aplicaciones se puede necesitar que un conjunto
de motores efectúen una operación de movimiento desde una
posición a otra en línea recta. Los movimientos interpolados
lineales se pueden realizar entre varios ejes. Los comandos
MOVE y MOVEABS también se utilizan para la interpolación lineal.
En este caso, los comandos tendrán varios argumentos para
especificar el movimiento relativo o absoluto de cada eje.
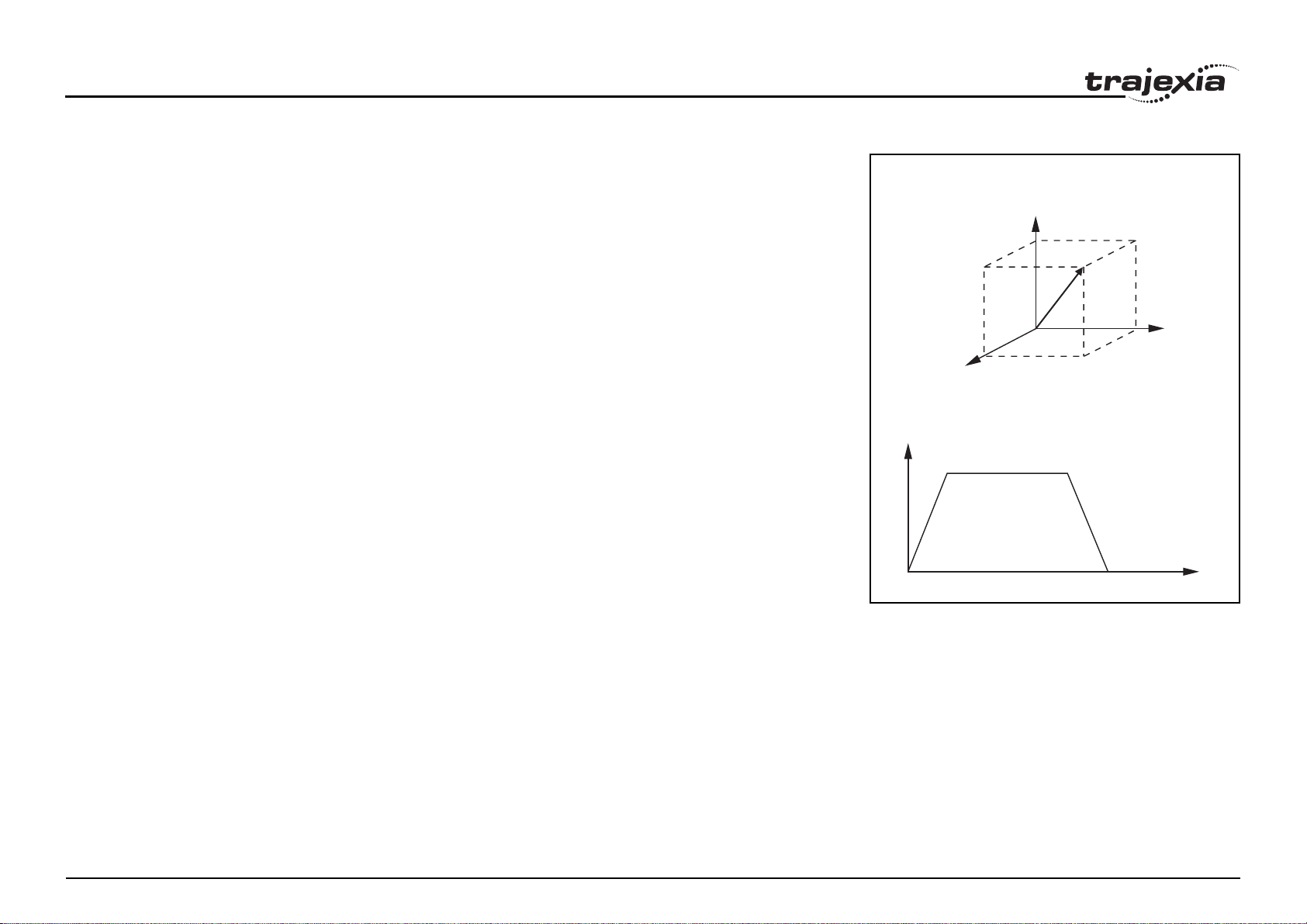
Considere el movimiento de tres ejes en un plano tridimensional
en la figura. Corresponde al comando MOVE(50,50,50).
En el diagrama se indica el perfil de velocidad del movimiento
a lo largo de la trayectoria. Los tres parámetros SPEED,
ACCEL y DECEL que determinan el movimiento multieje
se toman de los parámetros correspondientes del eje base.
El comando MOVE calcula los distintos componentes
de la solicitud de velocidad por eje.
A es el eje de tiempo y B es el eje de velocidad.
fig. 7
2
1
3
B
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 21
A
Page 22
Filosofía del sistema
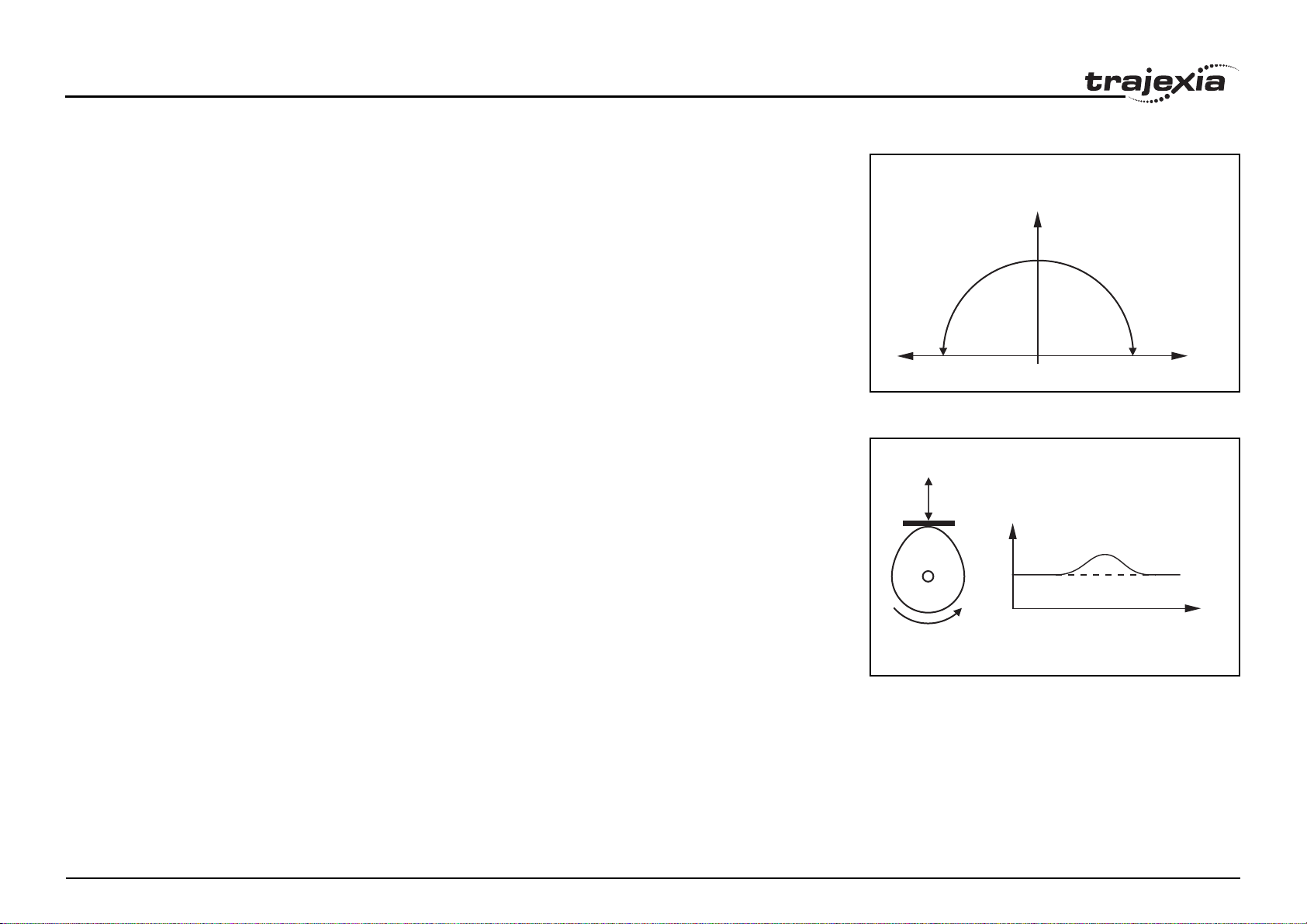
Interpolación circular
Se puede necesitar que una herramienta vaya desde el punto
inicial hasta el final por un arco de un círculo. En este caso,
el movimiento de dos ejes está relacionado con un movimiento
interpolado circular utilizando el comando MOVECIRC.
Considere el diagrama de la figura. Corresponde al comando
MOVECIRC(-100,0,-50,0,0). Se especifican el punto central
y el punto final deseado de la trayectoria relativa al punto inicial
y la dirección del movimiento. El comando MOVECIRC calcula
el radio y el ángulo de rotación. Al igual que el comando MOVE
de movimiento interpolado lineal, las variables ACCEL, DECEL
y SPEED asociadas al eje base determinan el perfil de velocidad
a lo largo del movimiento circular.
Control CAM
Además, de los perfiles de movimiento estándar, la TJ1-MC__
también proporciona una forma de definir un perfil de posición
para que se mueva el eje. El comando CAM mueve un eje según
los valores de posición almacenados en la matriz de tablas
de la TJ1-MC__. La velocidad del recorrido mediante el perfil
se determina por los parámetros del eje.
La figura corresponde al comando CAM(0,99,100,20).
A es el eje de tiempo y B es el eje de posición.
fig. 8
fig. 9
-50
50
050
B
2.2.3 Control EG
El control de reductora electrónica permite crear un enlace
de engranaje directo o un movimiento enlazado entre dos ejes.
La unidad MC admite las siguientes operaciones:
• Engranaje electrónico
Revisión 3.0
• CAM enlazada
• Movimiento enlazado
• Adición de ejes
MANUAL DE REFERENCIA DE HARDWARE 22
A
Page 23
Filosofía del sistema
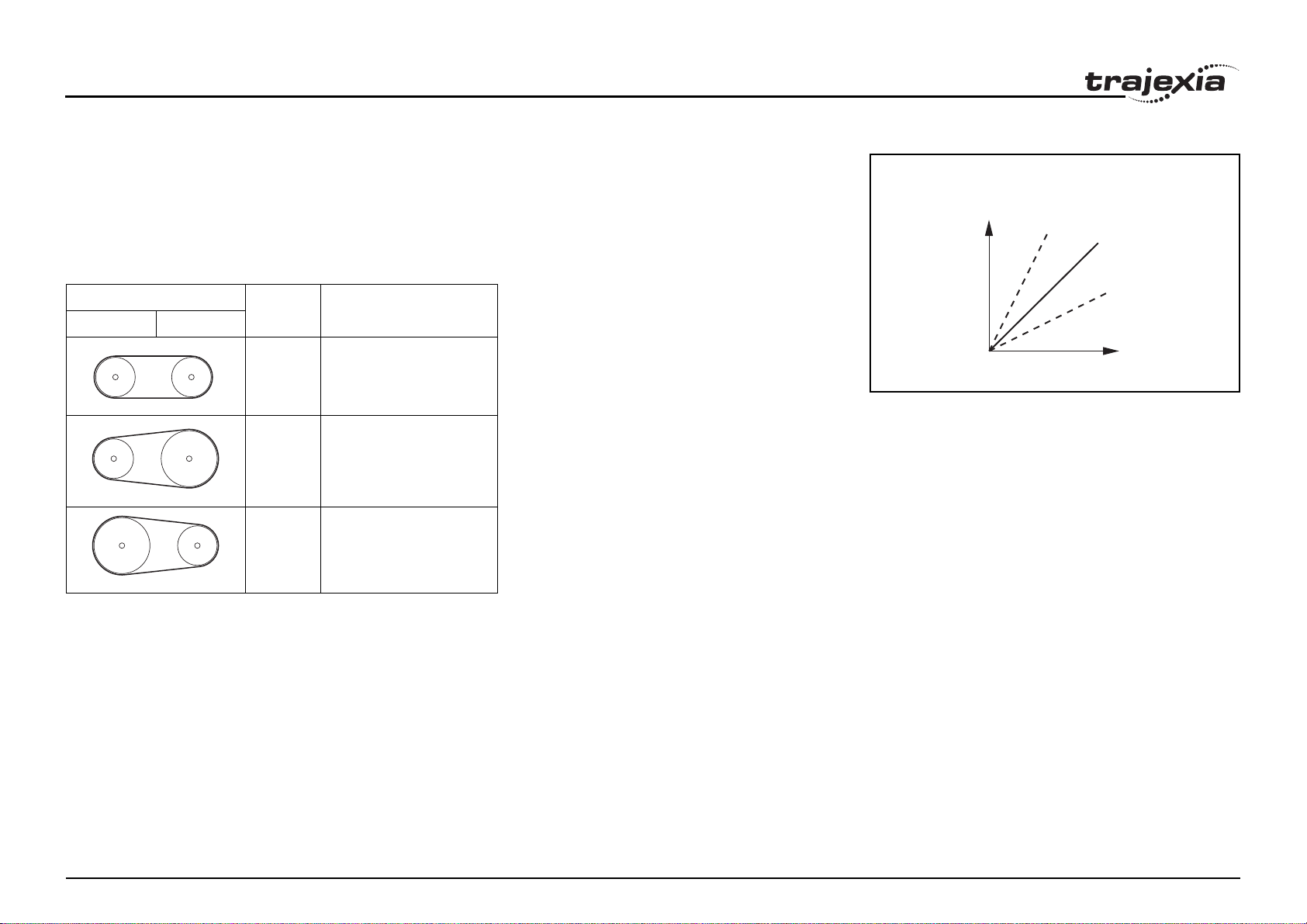
Engranaje electrónico
La TJ1-MC__ puede tener un enlace de engranaje desde
un eje a otro como si hubiera un engranaje físico que los
conectara. Esta operación se puede realizar mediante
el comando CONNECT en el programa. En el comando
se especifican la relación y el eje que se enlazará.
En la figura, A es el eje maestro y B es el eje de CONNECT.
/i
Ejes Relación Comando CONNECT
01
1:1 CONNECT(1,0) AXIS(1)
2:1 CONNECT(2,0) AXIS(1)
1:2 CONNECT(0.5,0) AXIS(1)
fig. 10
B
2:1
1:1
1:2
A
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 23
Page 24
Filosofía del sistema
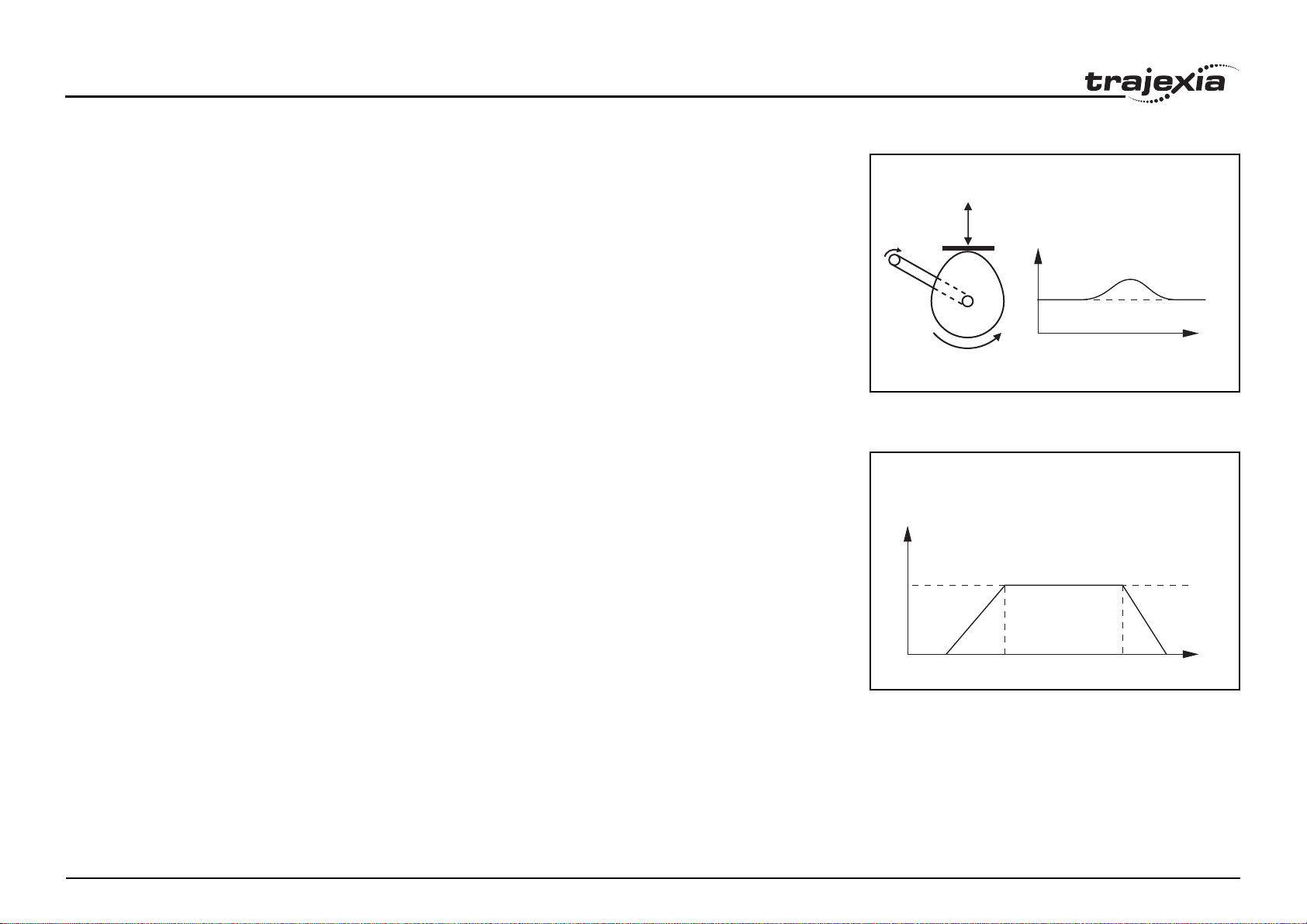
Control CAM enlazado
Además de la herramienta de perfiles CAM estándar, la TJ1-MC__
también proporciona una herramienta para enlazar el perfil CAM
a otro eje. El comando para crear el enlace se denomina
CAMBOX
La velocidad de recorrido mediante el perfil no se determina
por los parámetros del eje sino por la posición del eje enlazado.
Esta operación es similar a la conexión de dos ejes mediante
una leva.
En la figura, A es el eje maestro en la posición (0)
y B es el eje de CAMBOX en la posición (1).
Movimiento enlazado
El comando MOVELINK proporciona una forma de enlazar
un movimiento especificado a un eje maestro. El movimiento
se divide en velocidades de aceleración, de deceleración
y constante y se especifican en distancias de enlace maestro.
Esto puede resultar muy útil para sincronizar dos ejes durante
un período fijo.
Las etiquetas de la figura son:
A. Eje de tiempo.
B. Eje de velocidad.
C. Eje maestro (1).
D. Sincronizados.
E. MOVELINK eje (0).
fig. 11
.
B
A
fig. 12
B
DC
E
A
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 24
Page 25
Filosofía del sistema
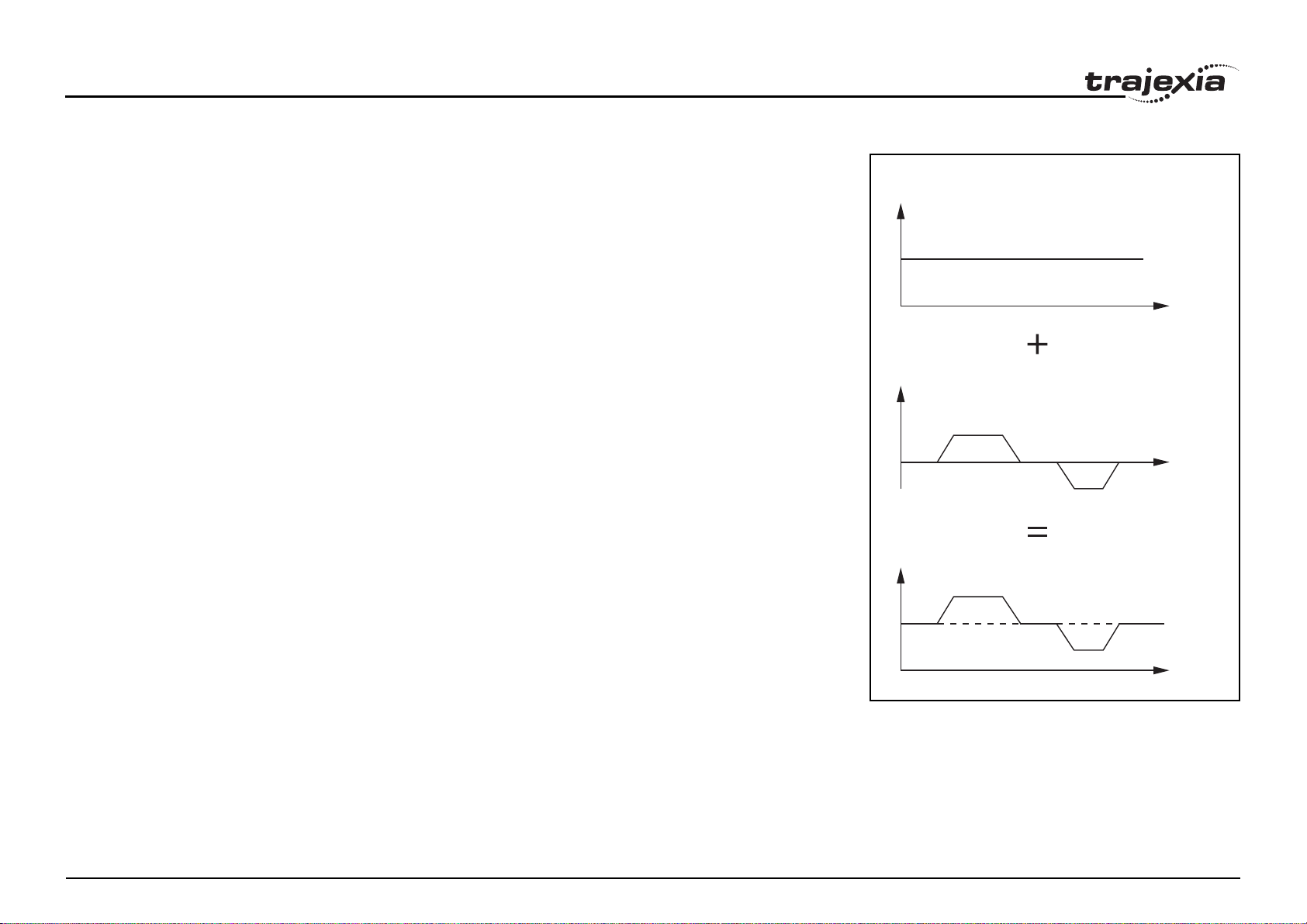
Adición de ejes
Resulta muy útil poder incorporar todos los movimientos
de un eje en otro. Por ejemplo, una aplicación posible sería
el cambio del offset entre dos ejes enlazados por un engranaje
electrónico. La TJ1-MC__ proporciona esta posibilidad mediante
el uso del comando ADDAX. Los movimientos del eje enlazado
constarán de todos los movimientos del eje real además
de los movimientos adicionales del eje maestro.
En la figura, A es el eje de tiempo y B es el eje de velocidad.
fig. 13
B
B
BASE(0)
ADDAX(2)
FORWARD
MOVE(100) AXIS(2)
MOVE(-60) AXIS(2)
A
A
B
2.2.4 Otras operaciones
Cancelación de movimientos
En la operación normal, o en caso de emergencia, puede
Revisión 3.0
ser necesario cancelar el movimiento actual desde los búferes.
Cuando se indican los comandos CANCEL o RAPIDSTOP, el eje
seleccionado o todos los ejes cancelarán su movimiento actual.
MANUAL DE REFERENCIA DE HARDWARE 25
A
Page 26
Filosofía del sistema
Búsqueda de origen
La realimentación del encoder para controlar la posición del motor
es incremental. Esto significa que todo el movimiento se debe
definir con respecto a un punto de origen. El comando DATUM
se utiliza para configurar un procedimiento por el que la TJ1-MC__
recorre una secuencia y busca el origen según las entradas
digitales y el marcador Z de la señal del encoder.
Registro de impresión
La TJ1-MC__ puede capturar la posición de un eje en un registro
cuando se produce un evento. El evento se denomina entrada
de registro de impresión. En el flanco ascendente o descendente
de una señal de entrada, que es el marcador Z o una entrada,
la TJ1-MC__ captura la posición de un eje en hardware.
Posteriormente, esta posición se puede utilizar para corregir
el error posible entre la posición real y la deseada. El registro
de impresión se configura mediante el comando REGIST.
La posición se captura en hardware y, por lo tanto, no hay
sobrecarga de software ni rutinas de servicio de interrupción,
con lo que se elimina la necesidad de tratar los problemas
de temporización asociados.
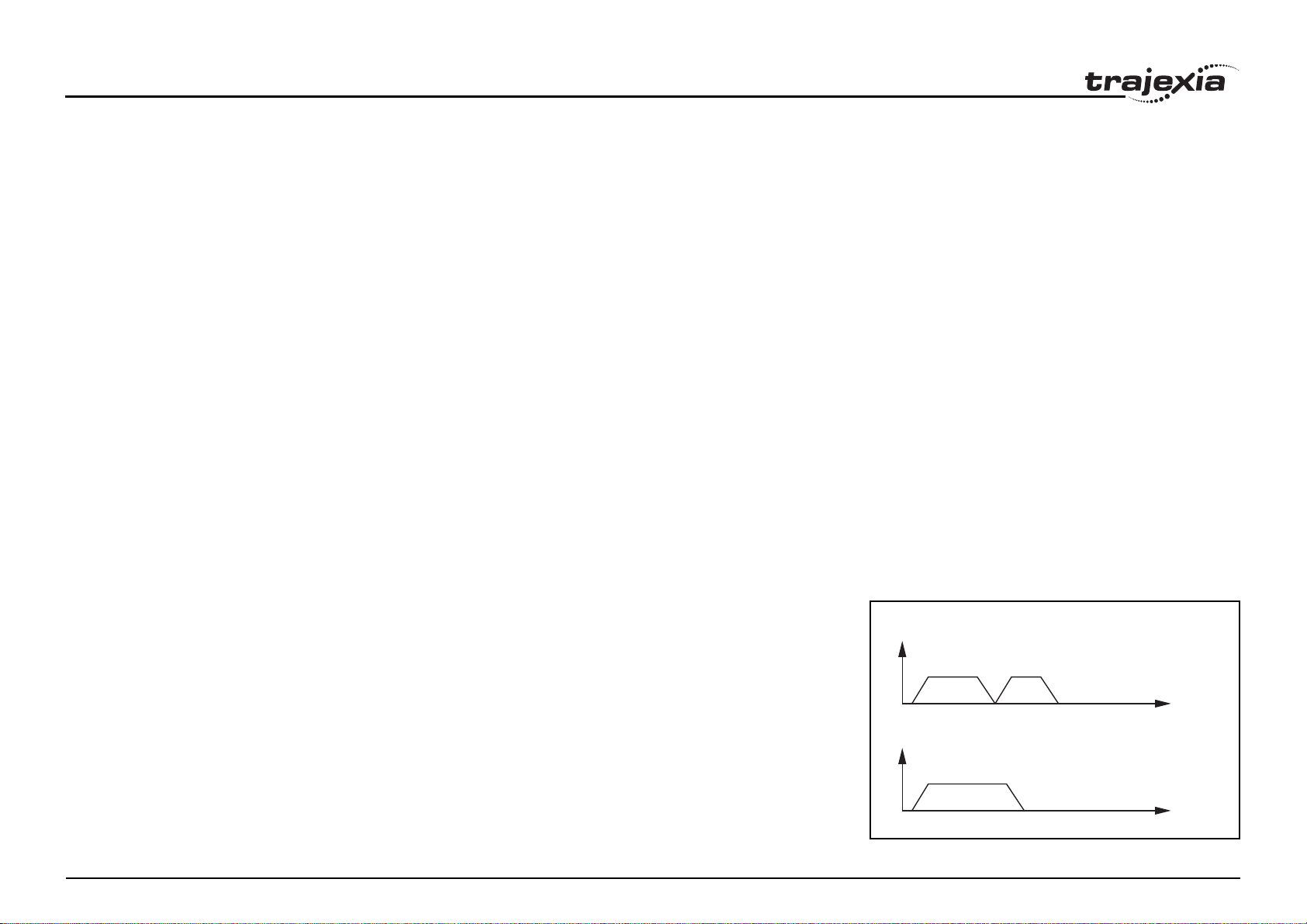
Combinación de movimientos
Si el parámetro de eje MERGE se ajusta en 1, un movimiento
siempre va seguido de un movimiento posterior sin pararse.
La figura muestra las transiciones de dos movimientos
con MERGE con los valores 0 y 1.
En la figura, A es el eje de tiempo y B es el eje de velocidad.
fig. 14
B
MERGE=0
Operación jog
Con la operación jog, los ejes se mueven a una velocidad
de avance o retroceso continua mediante el accionamiento
manual de las entradas digitales. También se pueden seleccionar
diferentes velocidades mediante entrada. Consulte los parámetros
Revisión 3.0
de eje FWD_JOG, REV_JOG y FAST_JOG.
MANUAL DE REFERENCIA DE HARDWARE 26
B
MERGE=1
A
A
Page 27
Filosofía del sistema
2.3 Principios de servosistema
El servosistema que utiliza la TJ1-MC__ y su operación interna
se describen brevemente en esta sección.
2.3.1 Sistema de lazo semicerrado
El servosistema de la TJ1-MC__ utiliza un sistema de lazo
semicerrado o cerrado deducido. Este sistema detecta los
movimientos de máquina reales mediante la rotación del motor
en relación con un valor de consigna. Calcula el error entre
el valor de consigna y el movimiento real, y reduce el error
mediante realimentación.
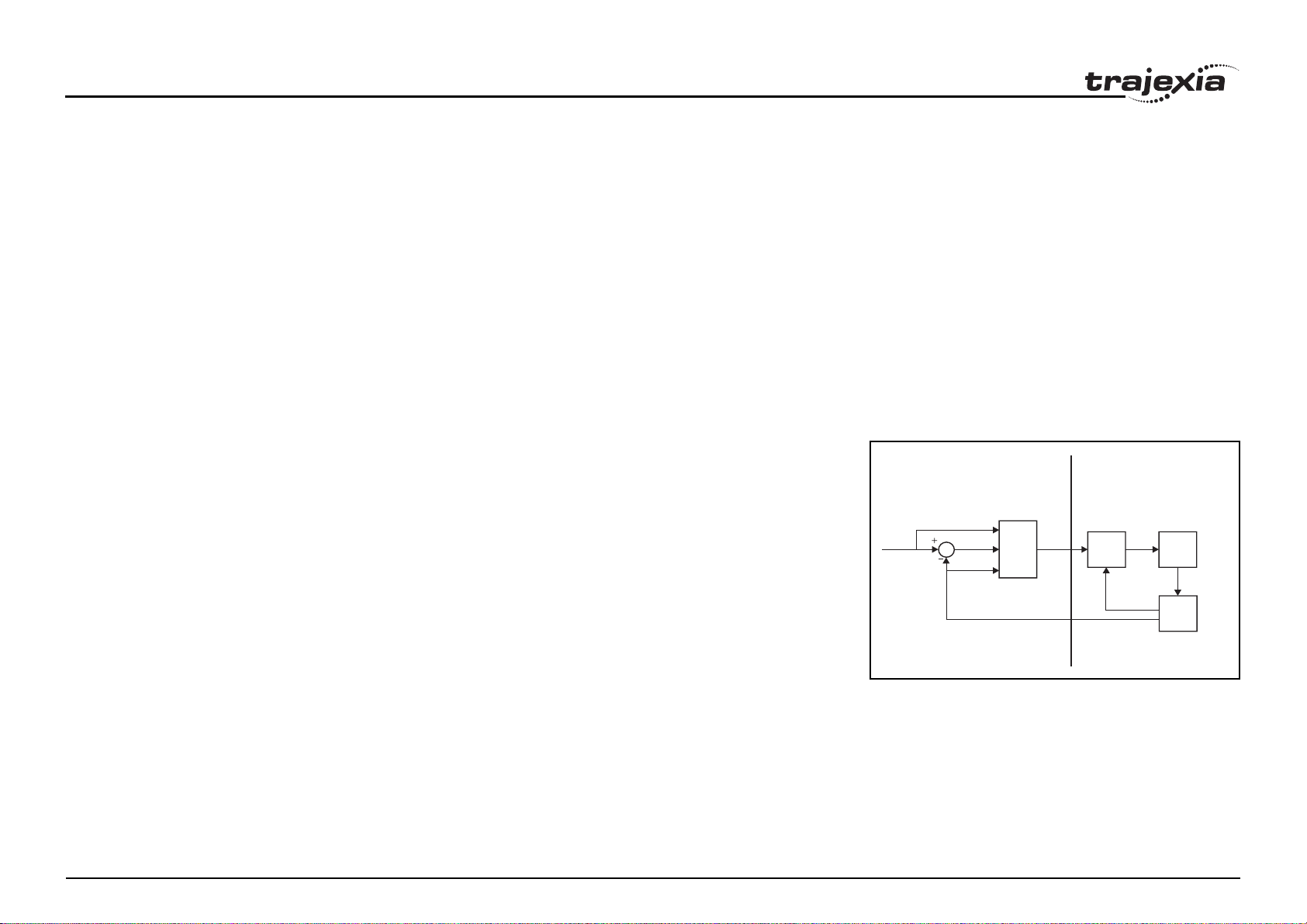
2.3.2 Operación interna de la TJ1-MC__
Los sistemas de lazo cerrado deducido constituyen
la corriente principal en los servosistemas modernos
aplicados a los dispositivos de posicionamiento para
aplicaciones industriales. En la figura se muestra el principio
básico del servosistema tal como se utiliza en la TJ1-MC__.
1. La TJ1-MC__ lleva a cabo un control de posición real.
La entrada principal del controlador es el error de seguimiento,
que es la diferencia calculada entre la posición solicitada
y la posición medida real.
2. El controlador de posición calcula la salida de referencia
de velocidad requerida que se determina mediante el error de
seguimiento y posiblemente la posición solicitada y la posición
medida. El servodriver proporciona la referencia de velocidad.
3. El servodriver controla la velocidad de rotación del servomotor
correspondiente a la referencia de velocidad. La velocidad
de rotación es proporcional a la referencia de velocidad.
4. El encoder rotativo genera los impulsos de realimentación
tanto para la realimentación de velocidad dentro del lazo
Revisión 3.0
de velocidad del servodriver como para la realimentación
de posición dentro del lazo de posición de TJ1-MC__.
fig. 15
C
AB
2
1
D
E
3
F
G
4
I
H
J
MANUAL DE REFERENCIA DE HARDWARE 27
Page 28
Filosofía del sistema
Las etiquetas de la figura son:
A. TJ1-MC__.
B. Servosistema.
C. Posición solicitada.
D. Control de posición.
E. Referencia de velocidad.
F. Control de velocidad.
G. M ot or.
H. Encoder.
I. Velocidad medida.
J. Posición medida.
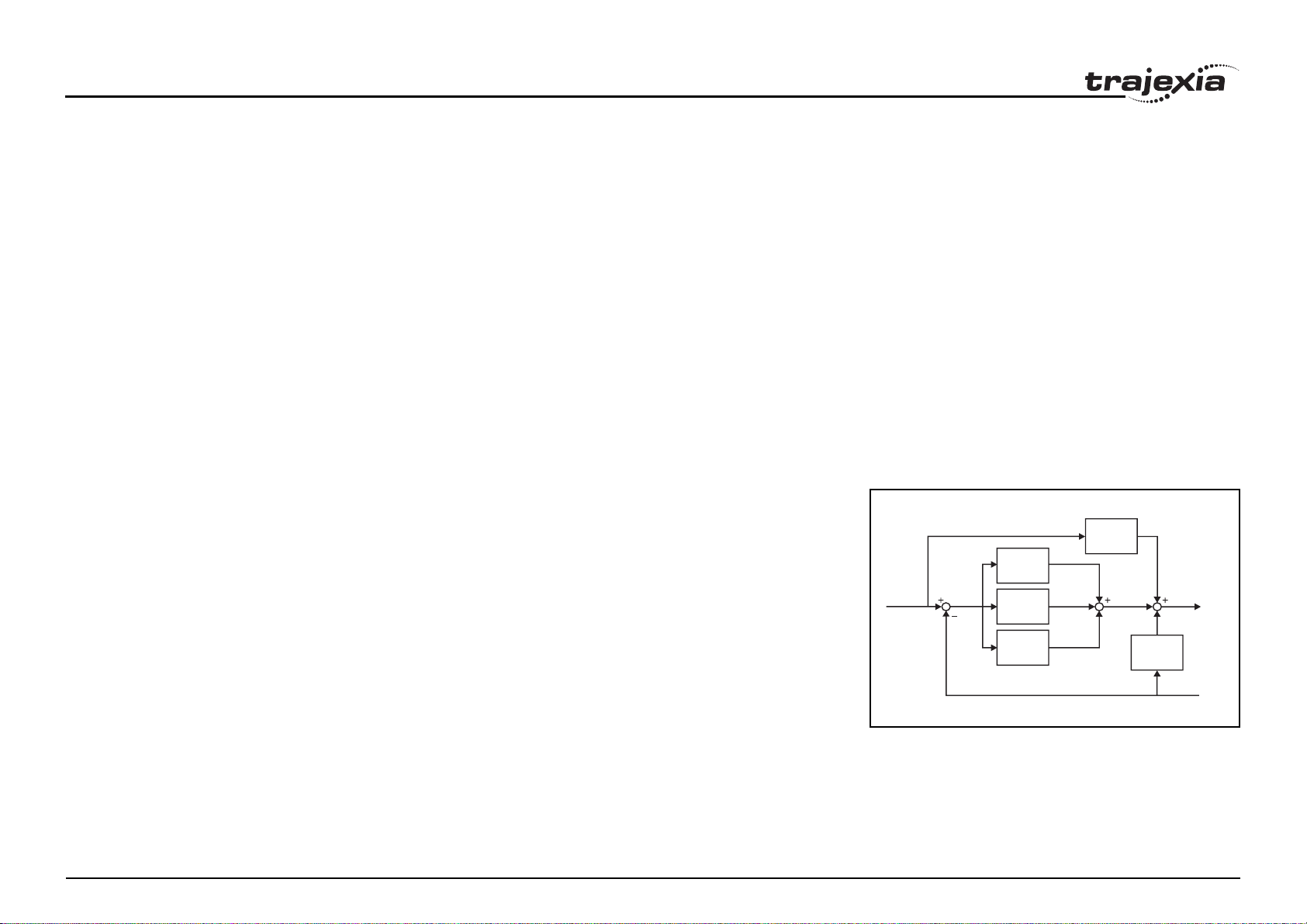
2.3.3 Algoritmo de Motion Control
El servosistema controla el motor mediante el ajuste continuo
de la referencia de velocidad del servodriver. La referencia
de velocidad se calcula mediante el algoritmo de Motion Control
de la TJ1-MC__, que se explica en esta sección.
El algoritmo de Motion Control utiliza la posición solicitada (A),
la posición medida (D) y el error de seguimiento (D) para determinar
la referencia de velocidad. El error de seguimiento es la diferencia
entre la posición solicitada y la medida. La posición solicitada, la
posición medida y el error de seguimiento se representan mediante
los parámetros de de eje
MPOS, DPOS yFE
cinco valores de ganancia para que el usuario pueda configurar
la operación de control correcta para cada aplicación.
C es la señal de salida.
• Ganancia proporcional
La ganancia proporcional K
crea una salida Op
p
que es proporcional al error de seguimiento E.
O
= Kp · E
p
Todos los sistemas prácticos utilizan ganancia proporcional.
Para la mayoría, es suficiente con usar sólo este parámetro
de ganancia. El parámetro de eje de ganancia proporcional
Revisión 3.0
se denomina P_GAIN.
. Se han implementado
fig. 16
∑
K
Vff
K
P
AB C
∑
K
I
∆
K
D
∆
K
Ov
D
MANUAL DE REFERENCIA DE HARDWARE 28
Page 29
Filosofía del sistema
• Ganancia integral
La ganancia integral K
crea una salida Oi que es proporcional
i
a la suma de los errores de seguimiento que se han producido
durante la operación del sistema.
O
= Ki · ΣE
i
La ganancia integral puede provocar sobreimpulso (overshoot) y,
por tanto, normalmente sólo se utiliza en sistemas que funcionen
a una velocidad constante o con aceleraciones lentas.
El parámetro de eje de ganancia integral se denomina
• Ganancia derivada
La ganancia derivada K
produce una salida Od que
d
es proporcional al cambio en el error de seguimiento
E y acelera hasta respuesta en los cambios de error
mientras mantiene la misma estabilidad relativa.
O
= Kd · ∆E
d
La ganancia derivada puede crear una respuesta más suave.
Los valores altos pueden provocar oscilación. El parámetro
de eje de ganancia derivada se denomina D_GAIN.
• Ganancia de velocidad de salida
La ganancia de velocidad de salida K
O
que es proporcional al cambio en la posición medida
ov
P
y aumenta la amortiguación del sistema.
m
O
= Kov · ∆P
ov
m
produce una salida
ov
La ganancia de velocidad de salida puede resultar útil para
suavizar movimientos, pero generará elevados errores de
seguimiento. El parámetro de eje de ganancia de velocidad
de salida se denomina OV_GAIN.
• Ganancia de realimentación positiva de velocidad
La ganancia de realimentación positiva de velocidad K
una salida O
solicitada P
O
= K
vff
que es proporcional al cambio en la posición
vff
y minimiza el error de seguimiento a alta velocidad.
d
· ∆P
vff
d
El parámetro se puede ajustar para minimizar el error
de seguimiento a una velocidad de máquina constante
Revisión 3.0
después de haber ajustado otras ganancias. El parámetro
de eje de ganancia de realimentación positiva de velocidad
se denomina VFF_GAIN.
I_GAIN
produce
vff
.
MANUAL DE REFERENCIA DE HARDWARE 29
Page 30
Filosofía del sistema
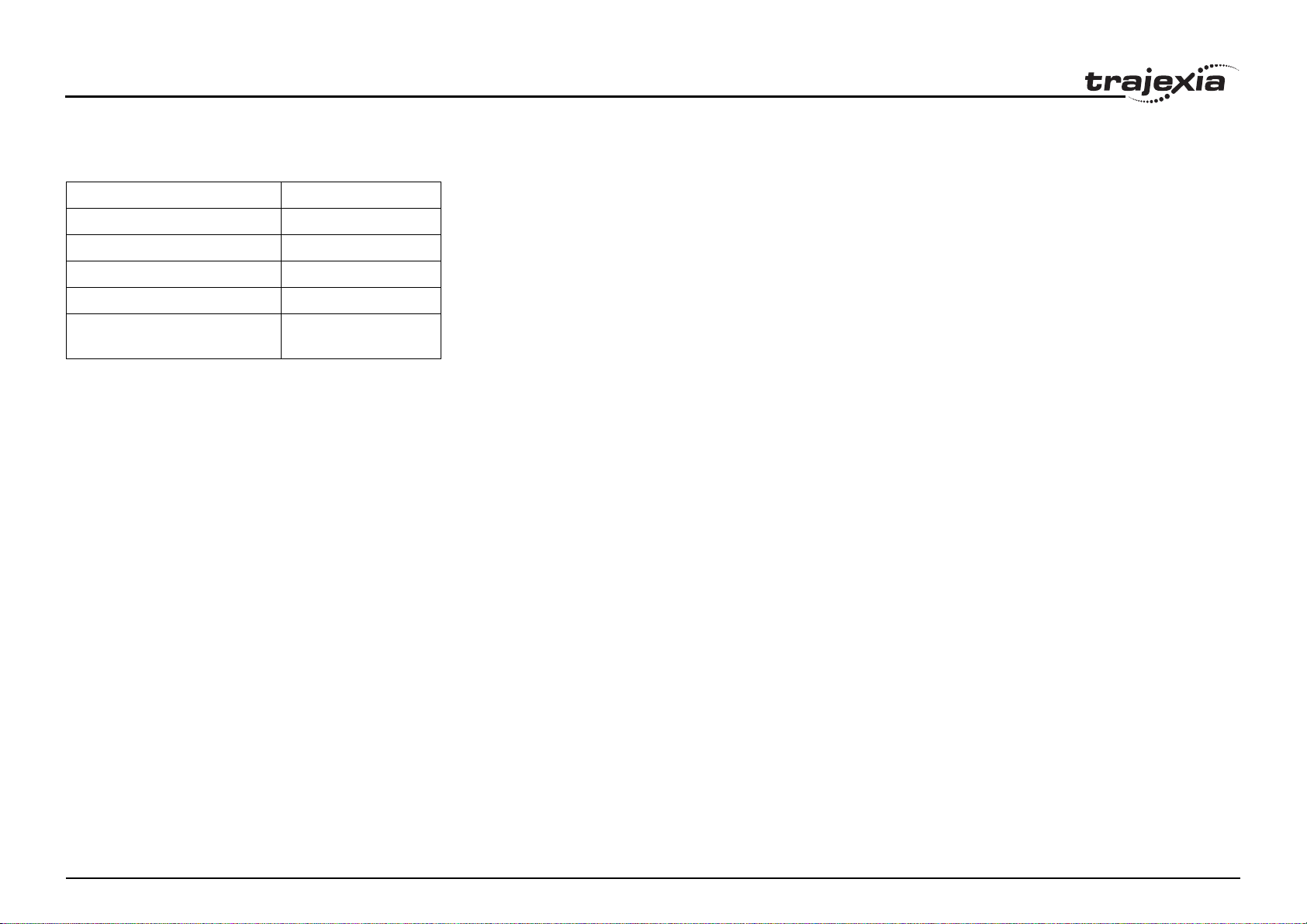
En la tabla se indican los ajustes predeterminados junto con los perfiles
resultantes. Para los ajustes de ganancia se permiten valores fraccionarios.
/i
Ganancia Valor predeterminado
Ganancia proporcional 0,1
Ganancia integral 0,0
Ganancia derivada 0,0
Ganancia de velocidad de salida 0,0
Ganancia de realimentación
positiva de velocidad
0,0
2.4 Arquitectura del sistema Trajexia
La arquitectura del sistema de Trajexia depende de estos conceptos:
• Control de programa
• Secuencia de movimiento
• Búferes de movimiento
• Comunicaciones
• Periféricos
Estos conceptos dependen del valor seleccionado en el parámetro
SERVO_PERIOD. La relación entre el valor de SERVO_PERIOD
y los diferentes conceptos de la arquitectura del sistema se describe
a continuación.
2.4.1 Control de programa
Con los programas el sistema funciona de un modo definido. Los programas
se escriben en un lenguaje similar a BASIC y controlan la aplicación
de los ejes y los módulos. Se pueden ejecutar 14 programas en paralelo.
Los programas se pueden configurar para ejecutarse al conectar
la alimentación del sistema, se pueden iniciar y parar desde otros
Revisión 3.0
programas y se pueden ejecutar desde Trajexia Tools.
Los programas ejecutan comandos para mover los ejes, controlan las
entradas y salidas y establecen comunicación mediante comandos BASIC.
2.4.2 Secuencia de movimiento
La secuencia de movimiento controla la posición de los 16 ejes
con las acciones siguientes:
• Lectura del búfer de movimiento
• Lectura de la posición medida actual (MPOS)
• Cálculo de la siguiente posición solicitada (DPOS)
• Ejecución del lazo de posición
• Envío del eje de referencia
• Tratamiento de errores
2.4.3 Búferes de movimiento
Los búferes de movimiento son el enlace entre los comandos BASIC
y el lazo de control del eje. Cuando se ejecuta un comando Motion Control
de BASIC, el comando se almacena en un uno de los búferes. Durante
la siguiente secuencia de movimiento, el generador ejecuta el movimiento
según la información del búfer.
Cuando el movimiento finaliza, el comando Motion Control se quita del búfer.
2.4.4 Comunicaciones
Todas las comunicaciones se llevan a cabo en la cuarta tarea de CPU.
Para configurar las comunicaciones se utiliza un conjunto de comandos
de comunicaciones BASIC. Cuando el Trajexia es un esclavo de
comunicaciones (como sucede en las comunicaciones PROFIBUS),
sólo es necesario configurar las comunicaciones en una tarea inicial.
Los valores se intercambian desde las variables globales configuradas
de una forma transparente. Cuando el Trajexia es un maestro
de comunicaciones, los comandos de comunicaciones BASIC
se utilizan para escribir y leer.
2.4.5 Periféricos
Todas las entradas y salidas se utilizan con el conjunto de parámetros
(IN, OP, AIN, AOUT). Las entradas y salidas se detectan automáticamente
y se asignan en Trajexia. Los variadores se consideran dispositivos
periféricos y tienen un conjunto de comandos BASIC para controlarlos.
Con una unidad TJ1-ML__ se pueden conectar varios módulos de entrada
y salida de MECHATROLINK-II.
MANUAL DE REFERENCIA DE HARDWARE 30
Page 31

Filosofía del sistema
2.5 Tiempo de ciclo
Todos los procesos del sistema Trajexia se basan en el tiempo
de ciclo. El tiempo de ciclo se divide en cuatro tareas de CPU:
• Intervalos de tiempo de 250µs para un valor
de SERVO_PERIOD de 0,5 y 1,0 ms
• Intervalos de tiempo de 500µs para un valor
de SERVO_PERIOD de 2,0 ms
Los procesos que se pueden llevar a cabo en cada intervalo de
tiempo dependen del valor de SERVO_PERIOD que esté definido.
Las operaciones ejecutadas en cada tarea de CPU:
Tarea de CPU Operación
Primera tarea de CPU Secuencia de movimiento
Proceso de prioridad baja
Segunda tarea de CPU Proceso de prioridad alta
Tercera tarea de CPU Secuencia de movimiento1
(sólo si SERVO_PERIOD = 0,5 ms)
Actualización de LED.
Proceso de prioridad alta
Cuarta tarea de CPU Comunicaciones externas
1
Nota
La ejecución de la secuencia de movimiento depende
el ajuste del parámetro SERVO_PERIOD.
fig. 17
fig. 18
250 µs
1
500 µs
1
2
Tiempo de ciclo = 1 ms
2
Tiempo de ciclo = 2 ms
3
3
4
4
2.5.1 Período de servo
El parámetro SERVO_PERIOD se puede configurar en 0,5,
1ó2ms. Los procesos que se llevan a cabo en el tiempo
de ciclo dependen del ajuste del parámetro SERVO_PERIOD.
El parámetro SERVO_PERIOD es un parámetro de Trajexia
Revisión 3.0
que se debe definir según la configuración del sistema.
El ajuste de fábrica es 1 ms (SERVO_PERIOD=1000).
El cambio sólo se establece después de reiniciar la TJ1-MC__.
MANUAL DE REFERENCIA DE HARDWARE 31
Page 32

Filosofía del sistema
Nota
Sólo el servodriver Sigma-III admite el ciclo
de transmisión de 0,5 ms.
Ejemplo 1
El parámetro SERVO_PERIOD tiene un valor de 0,5 ms
y la secuencia de movimiento se ejecuta cada 0,5 ms.
fig. 19
Tarea de CPU 1
Tarea de CPU 2
Secuencia de movimiento
Tarea de prioridad baja (0,1,2,3...)
Tarea de prioridad alta (13,14)
Ejemplo 2
El parámetro SERVO_PERIOD tiene un valor de 1 ms
y la secuencia de movimiento se ejecuta cada 1 ms. Como
la secuencia de movimiento no se ejecuta durante la tarea
de CPU 3, hay más tiempo para la ejecución del programa.
Los programas de prioridad alta se ejecutan más rápidos.
Revisión 3.0
Tarea de CPU 3
Tarea de CPU 4
fig. 20
Tarea de CPU 1
Tarea de CPU 2
Tarea de CPU 3
Tarea de CPU 4
Secuencia de movimiento
Actualización de LED
Tarea de prioridad alta (13,14)
Comunicaciones
Secuencia de movimiento
Tarea de prioridad baja (0,1,2,3...)
Tarea de prioridad alta (13,14)
Actualización de LED
Tarea de prioridad alta (13,14)
Comunicaciones
1 ms
1 ms
MANUAL DE REFERENCIA DE HARDWARE 32
Page 33

Filosofía del sistema
Ejemplo 3
El parámetro SERVO_PERIOD tiene un valor de 2 ms
y la secuencia de movimiento se ejecuta cada 2,0 ms.
Reglas de período de servo
El número de ejes y dispositivos MECHATROLINK-II
en el sistema Trajexia determina el valor del parámetro
del sistema SERVO_PERIOD.
Las unidades TJ1-MC__ admiten 3 tipos de dispositivos
MECHATROLINK-II:
• Servodrivers.
La TJ1-MC__ considera los servodrivers como ejes.
• Variadores de frecuencia.
La TJ1-MC__ no considera los variadores de frecuencia
como ejes.
• Unidades de E/S y acopladores de bus de sección.
La TJ1-MC__ no considera las unidades de E/S
(analógicas y digitales, contador e impulso)
y los acopladores de bus de sección como ejes.
Debe atenerse a las reglas más restrictivas al establecer
el parámetro SERVO_PERIOD. Un valor incorrecto del parámetro
SERVO_PERIOD da como resultado una detección incorrecta
de los dispositivos MECHATROLINK-II.
Las reglas más restrictivas se indican en las tablas siguientes. Para
cada unidad en la tabla se especifica el número máximo de dispositivos
que puede controlar en el ajuste
/i
SERVO_PERIOD TJ1-MC16 TJ1-MC04 TJ1-ML16 TJ1-ML04
SERVO_PERIOD
indicado.
fig. 21
Tarea de CPU 1
Tarea de CPU 2
Tarea de CPU 3
Tarea de CPU 4
Secuencia de movimiento
Tarea de prioridad baja (0,1,2,3...)
Tarea de prioridad alta (13,14)
Actualización de LED
Tarea de prioridad alta (13,14)
Comunicaciones
2 ms
0,5 ms 8 ejes 5 ejes 4 dispositivos 4 dispositivos
4 dispositivos que
no sean ejes
1,0 ms 16 ejes 5 ejes 8 dispositivos 4 dispositivos
Revisión 3.0
8 dispositivos que
no sean ejes
4 dispositivos que
no sean ejes
8 dispositivos que
no sean ejes
MANUAL DE REFERENCIA DE HARDWARE 33
Page 34

Filosofía del sistema
SERVO_PERIOD TJ1-MC16 TJ1-MC04 TJ1-ML16 TJ1-ML04
2,0 ms 16 ejes 5 ejes 16 dispositivos 4 dispositivos
8 dispositivos que
no sean ejes
8 dispositivos que
no sean ejes
Ejemplos de configuración
Ejemplo 1
• 1 unidad TJ1-MC__
• 1 unidad TJ1-ML__
• 3 servodrivers Sigma-II
• SERVO_PERIOD = 1 ms
fig. 22
Servodrive
TJ1-MC__ admite SERVO_PERIOD = 0,5 ms con 3 ejes.
TJ1-MC__ admite SERVO_PERIOD = 0,5 ms con 3 dispositivos.
Sigma-II admite
Revisión 3.0
SERVO_PERIOD
= 1 ms. Éste es el factor limitador.
Dirección
Mechatrolink
43
Eje 2
Todas las direcciones Mechatrolink
están numeradas 4x (hasta 16 por unidad)
Dirección
Mechatrolink
44
Eje 3
Dirección
Mechatrolink
45
Terminación
Eje 4
MANUAL DE REFERENCIA DE HARDWARE 34
Page 35

Filosofía del sistema
Ejemplo 2
• 1 unidad TJ1-MC16
• 2 unidades TJ1-ML16
• 16 servodrivers Sigma-II
• SERVO_PERIOD = 1 ms
TJ1-MC16 admite SERVO_PERIOD = 1 ms con 16 ejes.
TJ1-ML16 admite SERVO_PERIOD = 1 ms con 8 dispositivos.
Sigma-II admite SERVO_PERIOD = 1 ms.
fig. 23
Servodriver
Dirección41Dirección42Dirección43Dirección44Dirección45Dirección46Dirección47Dirección
48
Terminador
Eje 0
Dirección
49
Eje 8
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 35
Eje 1
Dirección4ADirección4BDirección4CDirección4DDirección4EDirección4FDirección
Eje 9
Eje 2
Eje 10
Eje 3
Eje 11
Eje 4
Eje 12
Eje 5
Eje 13
Eje 6
Eje 14
Eje 7
50
Eje 15
Terminador
Page 36

Filosofía del sistema
Ejemplo 3
• 1 unidad TJ1-MC16
• 1 unidad TJ1-ML16
• 8 servodrivers Sigma-II
• 1 variador F7Z con interfaz SI-T
• 3 unidades de E/S MECHATROLINK-II
• SERVO_PERIOD = 2,0 ms
TJ1-ML16 admite SERVO_PERIOD = 2 ms con 12 dispositivos.
Éste es el factor limitador.
Sigma-II admite SERVO_PERIOD = 1 ms.
SI-T admite 1 ms.
Las unidades de E/S MECHATROLINK-II admiten 1 ms.
Dirección
21
Dirección
0 31 32 95 96 159 160
Asignaciones de memoria de E/S
61
Dirección
62
fig. 24
Dirección
63
Dirección41Dirección42Dirección43Dirección44Dirección45Dirección46Dirección47Dirección
48
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 36
Page 37

Filosofía del sistema
Ejemplo 4
• 1 unidad TJ1-MC16
• 1 unidad TJ1-ML16
• 2 unidades TJ1-FL02
• 1 unidad TJ1-PRT
(no influye en el parámetro SERVO_PERIOD)
• 5 servodrivers Sigma-II
• SERVO_PERIOD = 1 ms
fig. 25
TJ1-MC16 admite SERVO_PERIOD = 1 ms con 9 ejes
(5 servoejes MECHATROLINK-II y ejes 4 TJ1-FL02)
TJ1-ML16 admite SERVO_PERIOD = 1 ms con 5 dispositivos.
TJ1-FL02 admite SERVO_PERIOD = 0,5 ms (2 ejes cada módulo)
Sigma-II admite SERVO_PERIOD = 1 ms.
2.6 Control del programa y multitarea
El sistema Trajexia dispone de control de programa, procesos
y multitarea.
2.6.1 Control de programa
El sistema Trajexia puede controlar 14 procesos escritos como
programas BASIC. Cuando el programa está configurado para
ejecutarse, se ejecuta.
Los procesos de 1 a 12 son de prioridad baja y 13 y 14 son
de prioridad alta.
Eje 8Eje 7 Eje 1Eje 0
Dirección 43Dirección 44Dirección 45Dirección 46Dirección
47
Eje 2 Eje 3 Eje 4 Eje 5
Eje 6
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 37
Page 38

Filosofía del sistema
2.6.2 Procesos
El proceso de prioridad baja 0 está reservado para la “ventana
de terminal” de Trajexia Tools. Esta ventana de terminal se utiliza
para escribir comandos BASIC directos en la TJ1-MC__
independientemente de otros programas. Estos comandos
se ejecutan después de pulsar Intro.
2.6.3 Multitarea
Cada tiempo de ciclo se divide en cuatro secciones denominadas
tareas de CPU. Los procesos se ejecutan en las tres primeras
tareas de CPU según la prioridad del proceso.
La secuencia de movimiento y los procesos de prioridad baja (A)
se ejecutan en el período de tarea de prioridad baja (LT).
Los procesos de prioridad alta (B) se ejecutan en los períodos
de tarea de prioridad alta (HT).
Las comunicaciones externas que no están relacionadas
con la red Motion Control se actualizan en el período
de comunicaciones (COMS) en la cuarta tarea de CPU.
Trajexia puede controlar hasta 14 programas simultáneamente.
A diferencia de los procesos de prioridad baja, un proceso
de prioridad alta siempre está disponible para su ejecución
durante dos de las cuatro tareas de CPU. Las tareas de prioridad
alta se ejecutan más rápidas que las de prioridad baja porque
disponen de más tiempo para su ejecución. Todas las tareas
de prioridad baja deben compartir un período de tiempo y la
tarea de prioridad alta tiene dos periodos de tiempo propios.
fig. 26
fig. 27
LT HT Nº 1 HT Nº 2
Tiempo de ciclo
A
LT HT Nº 1 HT Nº 2
B
Tiempo de ciclo
COMS.
COMS.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 38
Page 39

Filosofía del sistema
2.6.4 Ejemplo de multitarea
En el ejemplo 1 hay dos procesos de prioridad alta, 13 y 14.
Los dos períodos HT están reservados para estos procesos,
uno para los procesos 13 y otros para los procesos 14.
Los procesos de prioridad baja 3, 2, 1 y 0 se ejecutan en el
período LT, un proceso por tiempo de ciclo establecido en 1 ms.
En el ejemplo central, sólo hay un proceso de prioridad alta, 14.
Ambos períodos HT están reservados para este proceso.
Los procesos de prioridad baja 3, 2, 1 y 0 se ejecutan
en el período LT, un proceso por tiempo de ciclo.
En el ejemplo inferior, no hay procesos de prioridad alta.
Por lo tanto, los períodos HT se pueden utilizar para los procesos
de prioridad baja. El período LT también se puede utilizar para
los procesos de prioridad baja.
1
14
3
2
3
321
1 ms
1 ms
143
1 ms
13
COMS.
COMS.
COMS.
2
0
(c/l)
fig. 28
1 ms
13
14
1 ms
142
1 ms
32
1 ms
COMS. COMS.
1
COMS. COMS.
COMS. COMS.
10
14
(c/l)
1 ms
141
1 ms
13
0
(c/l)
(c/l)
3
COMS.
1 ms
13
14
1 ms
140
1 ms
210
(c/l)
COMS.
COMS.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 39
Page 40

Filosofía del sistema
2.7 Secuencia de movimiento y ejes
La secuencia de movimiento es la parte de la TJ1-MC__
que controla los ejes. La forma real en que actúa la secuencia
de movimiento depende del tipo de eje. Con el parámetro ATYPE
se puede establecer y leer el tipo de eje. Al iniciarse, el sistema
Trajexia detecta automáticamente la configuración de los ejes.
• El valor predeterminado del parámetroATYPE para los ejes
MECHATROLINK-II es 41 (velocidad MECHATROLINK).
• El valor predeterminado del parámetroATYPE para los ejes
TJ1-FL02 es 44 (servoeje con un encoder incremental).
Todos los ejes no asignados se definen como ejes virtuales.
El valor del parámetro ATYPE es 0.
Cada eje tiene la estructura general mostrada en fig. 29.
La secuencia de movimiento que se ejecutará al comienzo
de cada período de servo contendrá los siguientes elementos:
1. Transferencia de movimientos de los búferes de proceso
BASIC a los búferes de movimiento (consulte la sección 2.8).
2. Lectura de las entradas digitales.
3. Carga de los movimientos. (Ver nota).
4. Cálculo del perfil de velocidad. (Ver nota).
5. Cálculo de las posiciones de eje. (Ver nota).
6. Ejecución del servo de posición para el eje 0, también
se incluyen las comunicaciones de servodriver. (Ver nota).
7. Actualización de salidas.
PARÁMETRO DE EJE
Generador
de perfil
Posición
solicitada
Posición
medida
Lazo de posición
Lazo de posición
+
+
-
Error de
Error de
seguimiento
seguimiento
fig. 29
Comando
de velocidad
Servodriver
OFF
ON
Lazo de
velocidad
Lazo
de par
Bloque
M
E
Nota
Cada uno de estos elementos se realizará por turno
para cada eje antes de avanzar al elemento siguiente.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 40
Page 41

Filosofía del sistema
2.7.1 Generador de perfil
El generador de perfil es el algoritmo que calcula la posición
solicitada para cada eje. El cálculo se efectúa cada secuencia
de movimiento.
El perfil se genera según las instrucciones de Motion Control
de los programas BASIC.
2.7.2 Lazo de posición
El lazo de posición es el algoritmo que garantiza que hay una
desviación mínima entre la posición medida (MPOS) y la posición
solicitada (DPOS) del mismo eje.
2.7.3 Secuencia de eje
• Si se establece SERVO=OFF para un eje, se omiten
los comandos de Motion Control para dicho eje.
• Si el error de seguimiento (FE) de un eje supera el valor
de parámetroFELIMIT, se produce la siguiente acción:
- WDOG se configura en OFF y se paran todos los ejes.
- SERVO para el eje que provoca el error se pone en OFF.
- El movimiento actual se cancela y se quita del búfer.
2.7.4 Tipo de eje
fig. 30
Programa BASIC
.........
.........
MOVE(1000)
.........
.........
Generador de perfil
Posición solicitada
/i
ATYPE Se aplica a Nombre Descripción
0 Todos los ejes Eje virtual Eje interno sin salida física.
Es el único ajuste válido para los
ejes no asignados. Es decir, lo que
no son servos MECHATROLINK-II
o ejes flexibles.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 41
Page 42

Filosofía del sistema
ATYPE Se aplica a Nombre Descripción
40 Servodrivers
MECHATROLINK-II
conectados
a una TJ1-ML__.
41 Velocidad de
42 Par de
43 Driver externo
conectado
a una TJ1-FL02
44 Encoder de servoeje
45 Salida de encoder Igual que el motor paso a paso,
Posición de
MECHATROLINK-II
MECHATROLINK-II
(predeterminada)
MECHATROLINK-II
Salida de motor
paso a paso
(predeterminado)
Lazo de posición en el servodriver.
TJ1-MC__ envía la referencia de
posición al servodriver mediante
MECHATROLINK-II.
Lazo de posición en el Trajexia.
TJ1-MC__ envía la referencia de
velocidad al servodriver mediante
MECHATROLINK-II.
Lazo de posición en el Trajexia.
TJ1-MC__ envía la referencia
de par al servodriver mediante
MECHATROLINK-II.
Salidas de impulsos y dirección.
El lazo de posición está en el driver.
TJ1-FL02 envía impulsos
y no recibe realimentación.
Servo analógico. El lazo de posición
está en la TJ1-MC__. La TJ1-FL02
envía referencia de velocidad
y recibe posición de un encoder
incremental.
pero las salidas de diferencial
de fase emulan un encoder
incremental.
46 Tamagawa absoluto Igual que el servoeje, pero se recibe
realimentación de un encoder
absoluto Tamagawa.
47 EnDat absoluto Igual que el servoeje, pero se recibe
realimentación de un encoder
absoluto EnDat.
48 SSI absoluto Igual que el servoeje, pero se recibe
Revisión 3.0
realimentación de un encoder
absoluto SSI.
MANUAL DE REFERENCIA DE HARDWARE 42
Page 43

Filosofía del sistema
Eje virtual ATYPE=0
Puede dividir un perfil complejo en uno o varios movimientos
simples, cada uno asignado a un eje virtual. Estos movimientos
se pueden añadir entre sí con el comando BASIC ADDAX y,
a continuación, asignarse a un eje real.
fig. 31
Generador de perfil
Posición de MECHATROLINK-II ATYPE=40
Con SERVO = ON, el lazo de posición se cierra en el servodriver.
Los ajustes de ganancia en la TJ1-MC__ no tienen efecto.
La referencia de posición se envía al servodriver.
Nota
Aunque se actualizan MPOS y FE, el valor real
es el valor del servodriver. El error de seguimiento
real se puede monitorizar mediante el parámetro
DRIVE_MONITOR si se define DRIVE_CONTROL = 2.
Nota
La posición de MECHATROLINK-II ATYPE = 40
es el ajuste recomendado para obtener un mayor
rendimiento del servomotor.
TJ1-MC16
Generador
de perfil
El lazo de posición
de Trajexia está
desactivado.
(Las ganancias
no se utilizan.)
OFF
SERVO
Posición
solicitada
Posición
medida
Lazo de posición
Lazo de posición
+
+
-
Error de
Error de
seguimiento
seguimiento
fig. 32
NOP
SERVO
Comando
de velocidad
POSICIÓN
MEDIDA
TJ1-ML16
OFF
Comando
de posición
de ML-II
POSICIÓN
=
SOLICITADA
SERVO
Lazo de posición
Lazo de velocidad
Lazo de par
M
EE
M
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 43
Page 44

Filosofía del sistema
Velocidad de MECHATROLINK-II ATYPE=41
Con SERVO = ON, el lazo de velocidad se cierra en la TJ1-MC__.
La referencia de velocidad se envía al servodriver.
Con SERVO = OFF, la referencia de velocidad se envía mediante
el comando S_REF. 0x40000000 significa la velocidad máxima
del servomotor.
Par de MECHATROLINK-II ATYPE=42
Con SERVO = ON, el lazo de par se cierra en la TJ1-MC__.
La referencia de par del servodriver depende del parámetro
FE y la ganancia.
Con SERVO = OFF, la referencia de par se envía directamente
mediante el comando T_REF. 0x40000000 es el par máximo
del servomotor.
Nota
Para monitorizar el par del servo en DRIVE_MONITOR,
defina DRIVE_CONTROL=11.
TJ1-MC16
Generador
de perfil
TJ1-MC16
Generador
de perfil
OFF
Posición
solicitada
SERVO
OFF
Posición
solicitada
Posición
medida
Posición
medida
Lazo de posición
Lazo de posición
+
+
-
-
Error de
Error de
seguimiento
seguimiento
SERVO
Lazo de posición
Lazo de posición
+
+
-
-
Error de
Error de
seguimiento
seguimiento
fig. 33
S_REF
Comando
de velocidad
SERVOSERVO
TJ1-ML16 SERVO
OFF
Comando
de velocidad
de ML-II
SERVO_AXIS (n) = ON/OFF
fig. 34
T_REF
Comando
Comando
de par
de par
SERVO
TJ1-ML16 SERVO
OFF
Comando
de par
de ML-II
Lazo de velocidad
Lazo de par
EE
MM
Lazo de par
Revisión 3.0
EE
MANUAL DE REFERENCIA DE HARDWARE 44
MM
Page 45

Filosofía del sistema
Salida de motor paso a paso ATYPE=43
Se genera el perfil de posición y la salida del sistema es un tren
de pulsos y una señal de dirección. Esto resulta útil para controlar
un motor mediante pulsos o como una referencia de posición para
otro controlador de Motion.
Servoeje ATYPE=44
Con SERVO = ON se trata de un eje con una salida de referencia
de velocidad analógica y entrada de realimentación de encoder
incremental. El lazo de posición se cierra en la TJ1-MC__,
que envía la referencia de velocidad resultante al eje.
Generador de perfil
Posición
solicitada
Posición
medida
TJ1-MC16
Posición
+
_
Error de
seguimiento
fig. 35
Comando
de velocidad
TJ1-FL02
Variador
+_
10V
Señal del encoder
M
E
Con SERVO = OFF, se lee la posición del encoder incremental
fig. 36
externo. La salida analógica sólo se puede configurar con
comandos BASIC y puede tener un propósito general.
TJ1-FL02
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 45
TJ1-MC16
Posición
medida
Page 46

Filosofía del sistema
Salida de encoder ATYPE=45
Se genera el perfil de posición y la salida del sistema son pulsos
de encoder incrementales. Esto resulta útil para controlar un motor
mediante pulsos o como una referencia de posición para otro
controlador de Motion.
fig. 37
Generador de perfil
Tamagawa absoluto ATYPE=46
Con SERVO = ON se trata de un eje con una salida de referencia
de velocidad analógica y realimentación de encoder Tamagawa
absoluto. El lazo de posición se cierra en la TJ1-MC__
y la referencia de velocidad resultante se envía al eje.
Con SERVO = OFF, se lee la posición del Tamagawa absoluto
externo. La salida analógica sólo se puede configurar con
comandos BASIC y puede tener un propósito general.
EnDat absoluto ATYPE=47
Con SERVO = ON se trata de un eje con una salida de referencia
de velocidad analógica y realimentación de EnDat absoluto. El lazo
de posición se cierra en la TJ1-MC__ y la referencia de velocidad
resultante se envía al eje.
Con SERVO = OFF, se lee la posición del EnDat absoluto externo.
La salida analógica sólo se puede configurar con comandos BASIC
y puede tener un propósito general.
EJE 1
ATYPE = 45
Posición
medida
TJ1-FL02
SSI absoluto ATYPE=48
Con SERVO = ON se trata de un eje con una salida de referencia
de velocidad analógica y realimentación de SSI absoluto. El lazo
de posición se cierra en la TJ1-MC__ y la referencia de velocidad
Revisión 3.0
resultante se envía al eje.
MANUAL DE REFERENCIA DE HARDWARE 46
Page 47

Filosofía del sistema
Con SERVO = OFF, se lee la posición del SSI absoluto externo.
La salida analógica sólo se puede configurar con comandos
BASIC y puede tener un propósito general.
Resumen de tipos de eje y modos de control
En la tabla siguiente se enumeran los tipos de eje y sus modos
recomendados para control de velocidad, control de posición
y control de par.
/i
ATYPE SERVO Modo Comentario
40 0 Posición
(MECHATROLINK-II)
40 1 Posición
(MECHATROLINK-II)
41 0 Velocidad
(MECHATROLINK-II)
41 1 Posición
(MECHATROLINK-II)
42 0 Par
(MECHATROLINK-II)
42 1 Posición mediante par
(MECHATROLINK-II)
44, 46,
47, 48
44, 46,
47, 48
0 Velocidad
(Eje flexible)
1 Posición
(Eje flexible)
El lazo de posición se cierra en el servodriver.
No se permite ningún nuevo comando de Motion
Control.
Modo recomendado para control de posición
con ejes MECHATROLINK-II.
Modo recomendado para control de velocidad
con ejes MECHATROLINK-II. Configure la velocidad
con S_REF.
El lazo de posición se cierra en el Trajexia.
Esto ofrece un rendimiento inferior que cerrar
el lazo de posición en el servodriver.
Modo recomendado para control de par con ejes
MECHATROLINK-II. Configure el par con T_REF.
El lazo de posición se cierra en el Trajexia. La salida
del lazo de posición se envía como la referencia
de par al servodriver.
Modo recomendado para control de velocidad
con eje flexible.
El lazo de posición se cierra en el Trajexia.
Modo recomendado para control de posición
con eje flexible.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 47
Page 48

Filosofía del sistema
2.8 Búferes de movimiento
El búfer de movimiento es un almacén temporal de la instrucción
de Motion desde el programa BASIC al generador de perfil.
El programa BASIC continúa mientras la instrucción espera
en el búfer.
Hay tres tipos de búfer:
• MTYPE. El movimiento actual que se está ejecutando.
MTYPE se relaciona con el eje y no con el proceso.
• NTYPE. El nuevo movimiento que espera ejecutarse.
NTYPE se relaciona con el eje y no con el proceso.
• Búfer de programa. El tercer movimiento en búfer
no se puede monitorizar. El búfer de proceso
se relaciona con el proceso y no con el eje.
• Es posible comprobar si el búfer de proceso está
lleno comprobando el parámetro de proceso PMOVE.
Cuando se ejecuta una instrucción de Motion Control
en el programa BASIC, la instrucción se carga en el búfer
de proceso y se distribuye al búfer de eje correspondiente
en la siguiente secuencia de movimiento.
Si se ejecuta una cuarta instrucción de movimiento y los tres
búferes están llenos, el programa BASIC detiene la ejecución
hasta que un búfer de proceso está libre para utilizarse.
PROGRAMA BASIC
PROGRAMA BASIC
.......
.......
MOVE(-500)
MOVE(-500)
.......
.......
MOVE(1000)
MOVE(1000)
.......
.......
CONNECT(1,1)
CONNECT(1,1)
.......
Proceso 1
Proceso 2
Proceso 3
Proceso 4
Proceso 5
Proceso 6
Proceso 7
fig. 38
CONNECT(1,1) AXIS(2)
BÚFER DE PROCESO
fig. 39
Búfer de proceso
Búfer de proceso
Búfer de proceso
Búfer de proceso
Búfer de proceso
Búfer de proceso
Búfer de proceso
BÚFER DE EJE
(uno por eje)
NTYPE
MTYPE
Generador
de perfil
Eje 0
Eje 1
Eje 2
Eje 3
COMANDO DE MOTION CONTROL
que espera ejecutarse
COMANDO DE MOTION CONTROL
que se está ejecutando actualmente
POSICIÓN
SOLICITADA
ESPERA
NTYPE
NTYPE
NTYPE
NTYPE MTYPE
EJECUCIÓN
MTYPE
MTYPE
MTYPE
Eje 15
Revisión 3.0
Proceso 14
Búfer de programa
Cada proceso tiene su propio
“búfer de proceso”
Cada eje tiene 2 búferes propios:
NTYPE y MTYPE
NTYPE MTYPE
MANUAL DE REFERENCIA DE HARDWARE 48
Page 49

Filosofía del sistema
Ejemplo de instrucciones en búfer:
EJEMPLO:
PROGRAMA BASIC
.......
MOVE(-500)
.......
MOVE(1000)
.......
DATUM(3)
.......
MOVE(200)
.......
PROGRAMA BASIC
.......
MOVE(-500)
.......
MOVE(1000)
.......
DATUM(3)
.......
MOVE(200)
.......
PROGRAMA BASIC
.......
MOVE(-500)
.......
MOVE(1000)
.......
DATUM(3)
.......
MOVE(200)
.......
PROGRAMA BASIC
PROGRAMA BASIC
.......
.......
MOVE(-500)
MOVE(-500)
.......
.......
MOVE(1000)
MOVE(1000)
.......
.......
DATUM(3)
DATUM(3)
.......
.......
MOVE(200)
MOVE(200)
.......
.......
PROGRAMA BASIC
PROGRAMA BASIC
.......
.......
MOVE(-500)
MOVE(-500)
.......
.......
MOVE(1000)
MOVE(1000)
.......
.......
DATUM(3)
DATUM(3)
.......
.......
MOVE(200)
MOVE(200)
.......
.......
PROGRAMA BASIC
PROGRAMA BASIC
.......
.......
MOVE(-500)
MOVE(-500)
.......
.......
MOVE(1000)
MOVE(1000)
.......
.......
DATUM(3)
DATUM(3)
.......
.......
MOVE(200)
MOVE(200)
.......
.......
BÚFER
--------------------------------NTYPE IDLE
--------------------------------MTYPE MOVE(-500)
- - - -
BÚFER
- - - -
--------------------------------NTYPE MOVE(1000)
--------------------------------MTYPE MOVE(-500)
BÚFER
DATUM(3)
--------------------------------NTYPE MOVE(1000)
--------------------------------MTYPE MOVE(-500)
BÚFER
MOVE(200)
MOVE(200)
---------------------------------
--------------------------------NTYPE DATUM(3)
NTYPE DATUM(3)
---------------------------------
--------------------------------MTYPE MOVE(1000)
MTYPE MOVE(1000)
BÚFER
- - - - - -
- - - - - -
---------------------------------
--------------------------------NTYPE MOVE(200)
NTYPE MOVE(200)
---------------------------------
--------------------------------MTYPE DATUM(3)
MTYPE DATUM(3)
BÚFER
- - - - - -
- - - - - -
---------------------------------
--------------------------------NTYPE IDLE
NTYPE IDLE
---------------------------------
--------------------------------MTYPE MOVE(200)
MTYPE MOVE(200)
MOVE -500
MOVE -500
MOVE -500
MOVE -500
MOVE -500
MOVE -500
fig. 40
MOVE 1000
MOVE 1000
MOVE 1000
DATUM (3)
DATUM (3)
MOVE 200
1.- Todos los búferes están
vacíos y se carga un movimiento.
Se empieza a ejecutar el movimiento.
2.- Se carga un segundo movimiento
mientras el primero no ha finalizado.
El nuevo movimiento espera en
el segundo búfer.
3.- En el búfer de proceso se puede
almacenar un tercer movimiento.
Si el programa BASIC llega
a “MOVE(200)”, esperará.
4.- El primer movimiento ha finalizado.
El búfer se mueve una posición.
Se empieza a ejecutar el siguiente
movimiento.
5.- Como los movimientos enviados
han finalizado, el búfer se vacía
6.- Si no se ejecutan nuevos
movimientos, finalmente el búfer
se vaciará y el generador de perfil
quedará inactivo.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 49
Page 50

Filosofía del sistema
2.9 Sistema mecánico
2.9.1 Relación de inercia
La relación de inercia es un criterio de estabilidad. Cuanto mayor
sea la inercia de la carga en relación con la inercia del motor,
menores ganancias se podrán definir en el sistema antes
de alcanzar la oscilación y menor será el rendimiento que
se pude obtener.
Con una relación de 1:30 para servodrivers pequeños
y una relación de 1:5 para servodrivers grandes se puede
lograr la dinámica máxima de la combinación de motor-driver.
2.9.2 Rigidez
Si una máquina es más rígida y menos elástica, se pueden
establecer ganancias mayores sin vibraciones y se puede
alcanzar una dinámica mayor y un error de seguimiento menor.
2.9.3 Frecuencia de resonancia
Un sistema mecánico tiene al menos una frecuencia de resonancia.
Si el sistema mecánico se excita hasta la frecuencia de resonancia,
comienza a oscilar. Para los sistemas Motion Control, lo mejor es
tener los sistemas mecánicos con una frecuencia de resonancia
muy alta, es decir, inercia baja y rigidez alta.
La frecuencia de resonancia del sistema mecánico es el límite
de los ajustes de ganancia.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 50
Page 51

Referencia de hardware
3 Referencia de hardware
3.1 Introducción
Trajexia es la plataforma Motion Control de OMRON que ofrece
el rendimiento y la facilidad de uso de un sistema Motion Control
dedicado.
Trajexia es un sistema modular independiente que permite
la máxima flexibilidad y escalabilidad. En el corazón de Trajexia
se encuentra el coordinador de Motion Control multitarea TJ1.
Reforzado con un DSP de 32 bits, puede realizar tareas de Motion
Control como levas electrónicas, engranaje electrónico, control
de registro e interpolación, todo ello con simples comandos
Motion Control.
Trajexia ofrece un control perfecto de hasta 16 ejes mediante
un bus de Motion Control MECHATROLINK-II, o un control
analógico o de impulsos tradicional, con posicionamiento
independiente, control de par y velocidad para cada eje.
Y además su potente juego de instrucciones de Motion Control
hace que la programación se realice de forma intuitiva y sencilla.
Puede seleccionar de entre una amplia gama de los mejores
servosistemas rotativos, lineales y de accionamiento directo
y variadores. El sistema es escalable desde 2 hasta 16 ejes
y 8 variadores y módulos de E/S.
HMI serie NS
E/S digital
HostLink
MECHATROLINK-II
fig. 1
PLC serie CJ CX-one
Trajexia Tools
Ethernet
Maestro
PROFIBUS-DP
Maestro
DEVICENET
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 51
Page 52

Referencia de hardware
3.1.1 Aspectos destacados de Trajexia
Los aspectos destacados del sistema Trajexia son los siguientes:
Conectividad directa mediante Ethernet
El conector integrado Ethernet de Trajexia proporciona conectividad
directa y rápida a PCs, PLCs, HMIs y otros dispositivos, a la vez que
ofrece acceso completo a los drivers mediante un bus de Motion Control
MECHATROLINK-II. Permite mensajes explícitos a través de Ethernet
y mediante MECHATROLINK-II con el fin de proporcionar transparencia
completa hasta el nivel de actuador, lo que posibilita el acceso remoto.
Protección de los conocimientos
El método de cifrado de Trajexia garantiza la completa protección
y confidencialidad de sus valiosos conocimientos.
Puerto serie y E/S locales
Un conector serie proporciona conectividad directa con cualquier
PLC de OMRON, HMIs o cualquier otro dispositivo de campo. Con las
16 entradas y 8 salidas completamente configurables de las E/S incluidas
en el controlador puede adaptar Trajexia a su diseño de máquina.
Maestro MECHATROLINK-II
El maestro MECHATROLINK-II realiza el control de un máximo de
16 servos, variadores o E/S, a la vez que permite una transparencia
completa en todo el sistema. MECHATROLINK-II ofrece la velocidad
de comunicación y la precisión temporal esenciales para garantizar
un perfecto control de los movimientos de los servos. El tiempo de ciclo
de Motion Control se puede seleccionar entre 0,5 ms, 1 ms ó 2 ms.
Drivers y variadores
Hay disponible una amplia variedad de servos rotativos, lineales
y directos así como variadores para ajustarse a sus necesidades
de tamaño compacto, rendimiento y fiabilidad. Los variadores
conectados a MECHATROLINK-II están controlados con el mismo
tiempo de ciclo de actualización que los servodrivers.
E/S remotas
Las E/S del bus Motion Control MECHATROLINK-II proporcionan
expansión del sistema a la vez que mantienen los dispositivos
en un solo bus Motion Control.
PROFIBUS-DP
El esclavo PROFIBUS-DP permite la conectividad de red PROFIBUS
en la máquina.
DeviceNet
El esclavo DeviceNet permite la conectividad de red DeviceNet
en la máquina.
TJ1-FL02 (unidad de eje flexible)
La TJ1-FL02 permite el control completo de dos actuadores mediante
una salida analógica o tren de impulsos. El módulo admite los principales
protocolos de encoder absolutos, con lo que se puede conectar un encoder
Revisión 3.0
externo al sistema.
MANUAL DE REFERENCIA DE HARDWARE 52
Page 53

Referencia de hardware
3.1.2 Trajexia Tools
One software
La herramienta de programación intuitiva y sencilla de Trajexia,
basada en el conjunto de instrucciones Motion BASIC, incluye
comandos dedicados para enlazar ejes, levas electrónicas,
reductoras electrónicas, etc. La multitarea proporciona flexibilidad
en el diseño de aplicaciones. Los comandos Motion Control
se “almacenan en búfer”, por lo que los programas BASIC se
ejecutan mientras se ejecutan los movimientos de Motion Control.
One connection
Desde la conexión Ethernet se puede acceder por completo a los
parámetros y las funciones de los drivers en MECHATROLINK-II.
One minute
Trajexia Tools incluye herramientas de depuración avanzadas,
incluidas las funciones de seguimiento y osciloscopio, para
garantizar una operación eficiente y un tiempo de inactividad
mínimo.
Los servos, los variadores y las E/S conectados al bus
Motion Control MECHATROLINK-II se identifican y configuran
automáticamente, lo que permite configurar el sistema en pocos
minutos.
fig. 2
3.1.3 Este manual
Este manual de referencia de hardware ofrece información
dedicada a:
• La descripción, las conexiones y el uso de las unidades
Trajexia
• La descripción, las conexiones y el uso de los esclavos
MECHATROLINK-II
• Una filosofía detallada del diseño de sistema para obtener
Revisión 3.0
los mejores resultados de Trajexia
MANUAL DE REFERENCIA DE HARDWARE 53
Page 54

Referencia de hardware
3.2 Todas las unidades
3.2.1 Instalación del sistema
Un sistema Trajexia consta de estas unidades:
• Fuente de alimentación.
• TJ1-MC__ (unidad de Motion Control). Puede ser una de las
siguientes:
- TJ1-MC16. Admite 16 ejes reales o virtuales y 16 ejes
en total.
- TJ1-MC04. Admite 5 ejes reales y hasta 16 ejes virtuales,
con un total de 16 ejes.
• Hasta 7 unidades expansoras.
• TJ1-TER (unidad de terminación).
Las unidades expansoras (números de unidad 0–6)
se pueden disponer en cualquier orden. La TJ1-MC__
detecta automáticamente todas las unidades.
Un sistema Trajexia con una TJ1-MC16 puede incluir:
• De 0 a 4 unidades TJ1-ML__ (unidad maestra
MECHATROLINK-II).
• De 0 a 7 unidades TJ1-FL02.
• 0 ó 1 unidades TJ1-PRT (unidad esclava PROFIBUS-DP)
o TJ1-DRT (unidad esclava DeviceNet)
1
.
Un sistema Trajexia con una TJ1-MC04 puede incluir:
• De 0 a 4 unidades TJ1-ML__.
• De 0 a 3 unidades TJ1-FL02.
• 0 ó 1 unidades TJ1-PRT o TJ1-DRT
•
Número
de unidad:
-1
fig. 3
0123456
Revisión 3.0
1. Trajexia no admite una unidad TJ1-PRT y otra TJ1-DRT
en el mismo sistema.
MANUAL DE REFERENCIA DE HARDWARE 54
Page 55

Referencia de hardware
La figura muestra un ejemplo de una configuración simple.
A. Fuente de alimentación
B. TJ1-MC__.
C. TJ1-ML__.
D. Servodriver Sigma-II.
E. Unidad de interfaz NS115 MECHATROLINK-II.
F. Servomotor Sigma-II.
G. TJ1-TER.
fig. 4
M
C
1
6
O
M
R
O
N
MOTION CONTROLLER
CN3
G
C
B
A
0
1
2
3
4
M
L
1
5
6
7
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
F
D
E
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 55
Page 56

Referencia de hardware
1. Extraiga todas las unidades del embalaje. Asegúrese
de que todas las unidades están completas.
2. No quite las etiquetas de protección de las unidades.
3. Para desconectar la TJ1-MC__ y la TJ1-TER, empuje las
presillas (A) de la parte superior e inferior de la TJ1-TER
hacia la parte frontal.
4. Desconecte la TJ1-TER de la TJ1-MC__.
5. Empuje las presillas (A) de la parte superior e inferior
de todas las unidades hacia la parte frontal.
fig. 5
MC16
O
M
R
O
N
M
O
T
IO
N
fig. 6
A
0
1
2
3
C
O
N
T
R
O
4
L
L
E
R
5
6
7
C
N
3
C
N
1
T
E
R
M
O
N
/O
F
F
W
IR
E
2
/4
C
N
2
A
MC16
0
OM
1
RON
2
MOTION CONTROLLER
3
4
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 56
Page 57

Referencia de hardware
6. Conecte la TJ1-MC__ (C) a la fuente de alimentación (B).
7. Empuje las presillas (A) de la parte superior e inferior hacia
la parte trasera.
fig. 7
fig. 8
MC16
OMRON
MOTION CONTROLLER
CN3
CB
0
1
2
3
4
5
6
7
CN1
TERM
ON/OFF
WIRE
2/4
CN2
A
MC16
0
OMRON
1
2
MOTION
3
CON
TROLLER
4
5
6
7
CN
3
CN
1
TERM
O
N/OFF
W
IRE
2/4
CN
2
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 57
Page 58

Referencia de hardware
8. Repita los dos pasos anteriores para todas las demás
unidades.
9. Asegúrese de que la última unidad sea la TJ1-TER.
10. Baje todas las presillas (D) de todas las unidades.
11. Instale el sistema Trajexia en el carril DIN en posición vertical
para disponer de una refrigeración adecuada. El carril DIN
recomendado es del tipo PFP-100N2, PFP-100N o PFP-50N.
12. Suba todas las presillas (D) de todas las unidades.
13. Después de terminar el cableado de las unidades,
quite las etiquetas de protección de las unidades.
fig. 9
fig. 10
MC16
O
M
R
O
N
MOTION CONTROLLER
A
0
1
2
3
4
M
L
5
6
7
CN3
1
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
D
MC16
0
O
1
M
R
O
N
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
C
N
3
ML16
5
6
7
C
N
1
T
E
R
M
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
R
U
N
8
F
C
N
1
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 58
Page 59

Referencia de hardware
14. No instale las unidades Trajexia en ninguna de estas
posiciones:
• Boca abajo.
• Con la parte frontal hacia delante.
• Con la parte inferior hacia delante.
• Verticalmente.
fig. 11
2
N
C
/4
2
E
R
I
W
F
F
/O
N
O
M
R
E
1
N
C
F
8
N
U
R
T
3
N
C
1
N
C
7
R
E
L
L
O
R
T
N
O
C
N
IO
T
O
M
6
OMRON
5
4
3
2
1
0
ML16
MC16
CN1
F
N
8
U
R
L16
M
C16
M
2
CN
E
N1
C
2/4
N/OFF
WIR
ERM
O
T
7
6
5
4
3
2
1
0
R
E
LL
CN3
CONTRO
MOTION
OMRON
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 59
Page 60

Referencia de hardware
15. Al diseñar un armario para las unidades, asegúrese de que
permite al menos 20 mm de espacio alrededor de las unidades
para proporcionar suficiente flujo de aire. Se aconseja dejar
al menos 100 mm de espacio alrededor de las unidades.
fig. 12
Canaleta
Unidad
Canaleta
20 mm mín.
Carril DIN
20 mm mín.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 60
Page 61

Referencia de hardware
3.2.2 Condiciones ambientales y de almacenamiento
para todas las unidades
/i
Elemento Especificación
Temperatura ambiente
de operación
Humedad ambiente de operación 10 a 90% de HR (sin condensación)
Temperatura ambiente
de almacenamiento
Humedad ambiente
de almacenamiento
Atmósfera Sin gases corrosivos
Resistencia a vibraciones 10 a 57 Hz: (0,075 mm de amplitud):
Resistencia a golpes 147 m/s
Resistencia de aislamiento 20 MΩ
Rigidez dieléctrica 500 Vc.a.
Grado de protección IP20
Normas internacionales CE, EN 61131-2, cULus, Lloyds
0 a 55°C
–20 a 70°C (sin incluir la batería)
90% máx. (sin condensación)
2
57 a 100 Hz: Aceleración: 9,8 m/s
direcciones X, Y y Z durante 80 minutos
2
, 3 veces en cada una de las
direcciones X, Y y Z
(Homologación pendiente de cULus
para TJ1-MC04 y TJ1-ML04)
Compatible con RoHS
, en las
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 61
Page 62

Referencia de hardware
3.2.3 Dimensiones de las unidades
Las dimensiones de las unidades del sistema Trajexia
son las siguientes:
Controlador de Motion Trajexia
Todas las medidas se especifican en milímetros.
fig. 13
Revisión 3.0
65
62
71
94
90
70,3
MANUAL DE REFERENCIA DE HARDWARE 62
Page 63

Referencia de hardware
Unidades Trajexia
Todas las medidas se especifican en milímetros.
fig. 14
31
39,9
94
90
70,3
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 63
Page 64

Referencia de hardware
Sistema Trajexia
Todas las medidas se especifican en milímetros.
PA202
fig. 15
65
90
94
El fondo de instalación del sistema Trajexia es de 90 mm
como máximo, según los módulos que estén montados.
Calcule suficiente fondo para el armario de control.
3.2.4 Cableado de los conectores Weidmüller
Las unidades TJ1-MC__ y TJ1-FL02 tienen conectores
Revisión 3.0
Weidmüller. Las unidades incluyen contraconectores Weidmüller.
Para cablear los contraconectores Weidmüller, realice estos pasos:
fig. 16
62
3145
94
29,7
90
70,30
81,60 a 89,0 mm
MANUAL DE REFERENCIA DE HARDWARE 64
Page 65

Referencia de hardware
1. Pele los cables.
2. Para facilitar la inserción de los cables, retuérzalos.
3. Si es necesario, doble hacia dentro las punteras planas
(superiores) o las punteras con virola (inferiores).
4. Inserte el destornillador en el orificio interior (cuadrado).
Empuje firmemente.
5. Introduzca el cable en el orificio exterior (circular).
6. Retire el destornillador.
7. Asegúrese de que no quedan hilos sueltos.
Especificaciones de cableado
/i
Elemento Especificación
Tipos de cable 0,14−1,0 mm
Rígidos, trenzados o trenzados con puntera:
• Crimpar punteras según DIN46228/1
• Crimpar punteras con virola de plástico según
DIN46228/4
• Con la herramienta recomendada Weidmüller PZ6
Herramienta
Destornillador de 2,5 mm de punta plana
de inserción
Tipos de puntera
recomendados
Weidmüller
AEH H0,14/12
AEH H0,25/12
AEH H0,34/12
Longitud de pelado 7 mm sin punteras (tolerancia: +1 mm, −0 mm)
10 mm con punteras (tolerancia: +1 mm, −0 mm)
2
fig. 17
Tamaño del conductor
/i
Elemento Especificación
Rango de fijación 0,08−1,0 mm
Cables sin puntera 0,5−1,0 mm
Revisión 3.0
Cables con puntera AEH H0,14/12, 0,13 mm
AEH H0,25/12, 0,25 mm
AEH H0,34/12, 0,34 mm
2
2
2
2
2
MANUAL DE REFERENCIA DE HARDWARE 65
Page 66

Referencia de hardware
3.3 Fuente de alimentación
3.3.1 Introducción
La fuente de alimentación suministra alimentación a las demás
unidades del sistema Trajexia. Puede utilizar tres tipos distintos
de fuentes de alimentación con el sistema Trajexia:
• CJ1W-PA202
• CJ1W-PA205R
• CJ1W-PD025.
3.3.2 Conexiones de fuente de alimentación
Cada fuente de alimentación tiene seis terminales:
/i
Elemento CJ1W-PA202 CJ1W-PA205R CJ1W-PD025
A Entrada
de 110–240 Vc.a.
B Entrada
de 110–240 Vc.a.
C Tierra de línea Tierra de línea
D Tierra Tierra
E N/C Contacto relé de Wdog
F N/C Contacto relé de Wdog N/C
1. El terminal de tierra de línea (C) es un terminal neutro de filtro
de ruidos. Si el ruido supone una fuente importante de errores
o las descargas eléctricas suponen un problema, conecte
el terminal de tierra de línea al terminal de tierra (D) y conecte
ambos a tierra con una resistencia inferior a 100 ohmios.
2. Para evitar descargas eléctricas, conecte el terminal de tierra
(D) con una resistencia inferior a 100 ohmios con un cable
Revisión 3.0
de calibre 14 o un área de sección mínima de 2 mm
3. Los terminales E y F de la CJ1W-PA205R son contactos relé
que se cierran cuando está activado Wdog. Consulte los
comandos BASIC en el manual de programación.
Entrada
de 110–240 Vc.a.
Entrada
de 110–240 Vc.a.
1
2
Entrada
de 24 Vc.c.
Entrada
de 0 V
Tierra de línea
Tierra
3
N/C
fig. 18
G
XXXXX
POWER
A
AC100
-240V
INPUT
L1
L2/N
B
C
D
NC
NC
E
F
2
.
MANUAL DE REFERENCIA DE HARDWARE 66
Page 67

Referencia de hardware
Cada fuente de alimentación tiene un LED verde (G). Este LED
se enciende al conectar la fuente de alimentación a la alimentación.
Precaución
Apriete los tornillos del bloque de terminales de la fuente
de alimentación al par de apriete de 1,2 N·m. Los tornillos
flojos pueden provocar cortocircuitos, un funcionamiento
incorrecto o un incendio.
3.3.3 Especificaciones de la fuente de alimentación
/i
Fuente
De
Alimentación
CJ1W-PA202 110–240 Vc.a. 2,8 A 0,4 A 14 W
CJ1W-PA205R 110–240 Vc.a. 5,0 A 0,8 A 25 W
CJ1W-PD025 24 Vc.c. 5,0 A 0,8 A 25 W
Tens ión
de entrada
Precaución
La cantidad de corriente y potencia que se puede suministrar
al sistema está limitada por la capacidad de la fuente de
alimentación del mismo. Consulte esta tabla al diseñar el sistema
de modo que el consumo total de las unidades del sistema
no supere la corriente máxima de cada grupo de tensión.
El consumo total no debe superar el máximo de la fuente
de alimentación.
Consumo máximo Potencia
Grupo de 5 V Grupo de 24 V
de salida
3.3.4 Contenido de la caja de la fuente de alimentación
• Hoja de seguridad.
• Fuente de alimentación.
• Etiqueta de protección colocada en la superficie superior de la unidad.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 67
Page 68

Referencia de hardware
3.4 TJ1-MC__
3.4.1 Introducción
La TJ1-MC__ es el corazón del sistema Trajexia. Puede programar
la TJ1-MC__ con el lenguaje de programación BASIC para
controlar las unidades expansoras y los servomotores conectados
a las unidades expansoras. Consulte el manual de programación.
Existen dos versiones de TJ1-MC__: La TJ1-MC04 admite 4 ejes.
La TJ1-MC16 admite 16 ejes.
La TJ1-MC__ tiene estos componentes visibles:
/i
fig. 19
Componente Descripción
A Display de LEDs
B LEDs de E/S 0–7
C Batería
D Conector Ethernet
E Interruptor TERM ON/OFF
F Interruptor WIRE 2/4
G Conector serie
H Conector de E/S de 28 pines
Revisión 3.0
A
B
C
D
E
F
G
H
MANUAL DE REFERENCIA DE HARDWARE 68
Page 69

Referencia de hardware
3.4.2 Display de LEDs
El display de LEDs muestra la siguiente información:
Información Cuándo
Dirección IP
y máscara
de subred
Dirección IP Se muestra 4 veces al conectar un cable Ethernet
RUN Cuando la TJ1-MC__ acciona un servodriver.
OFF Cuando la TJ1-MC__ no acciona un servodriver.
ERR + código Cuando se produce un error en el sistema Trajexia.
Se muestra 3 veces al conectar el sistema Trajexia
a la alimentación.
al conector Ethernet de la TJ1-MC__ y a un PC.
El código es el código de error. Consulte el capítulo
de detección y corrección de errores en el manual
de programación.
fig. 20/i
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 69
Page 70

Referencia de hardware
3.4.3 Conexiones de la TJ1-MC__
La TJ1-MC__ incluye estos conectores:
• Un conector Ethernet para la conexión
a un PC o una red Ethernet (D)
• Un conector serie (G).
• Un conector de E/S de 28 pines (H).
Se incluyen los componentes para el conector serie y el conector
de 28 pines.
Conector Ethernet
El conector Ethernet se utiliza para conectar la TJ1-MC__
a un PC o una red Ethernet. El conector Ethernet es la única
conexión que se puede utilizar para programar el sistema.
Utilice un cable cruzado o de conexión Ethernet para efectuar
esta conexión. Si conecta el PC directamente al TJ1-MC__
y no mediante un concentrador u otro dispositivo de red,
el PC debe contar con una dirección IP fija.
La TJ1-MC__ detecta automáticamente cuándo se conecta
un cable al conector Ethernet.
Precauciones de instalación básicas
Asegúrese de que el sistema Ethernet es compatible
con el estándar IEEE 802.3.
No instale el sistema Ethernet cerca de una fuente de ruido.
fig. 21
A
B
C
D
E
F
G
H
Precauciones ambientales
Los cables UTP no están apantallados. En los entornos expuestos
a ruidos, utilice un sistema cable de par trenzado apantallado
(STP) y concentradores adecuados para un entorno FA.
Instale los cables de par trenzado alejados de líneas de alta
tensión y de dispositivos que generen ruido.
Instale los cables de par trenzado en lugares que no estén
Revisión 3.0
expuestos a altos niveles de humedad y excesivo polvo
y contaminantes.
MANUAL DE REFERENCIA DE HARDWARE 70
Page 71

Referencia de hardware
Conector serie
El conector serie permite tres estándares de comunicaciones:
• RS232.
• RS422.
• RS485.
/i
Pin Comunicaciones Conexión
1 RS422/RS485 /Tx
2RS232 Tx
3RS232 Rx
4N/C N/C
5N/C N/C
6 RS422/RS485 /Rx
7 RS422/RS485 Tx
8 RS422/RS485 Rx
9RS232 0 V
Interruptor TERM ON/OFF
Activa y desactiva la terminación de la conexión serie RS422/485.
El ajuste del interruptor TERM ON/OFF depende del estándar
de comunicaciones de la conexión serie y de la posición
de la TJ1-MC__ en la red:
/i
fig. 22
9
8
7
6
4
3
2
1
5
Estándar de
comunicaciones
RS422 ó RS485 Primera o última Izquierda (activado)
RS422 ó RS485 Ni la primera ni la última Derecha (desactivado)
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 71
Posición
de la TJ1-MC__
Ajuste del interruptor
TERM ON/OFF
Page 72

Referencia de hardware
Interruptor WIRE 2/4
El interruptor WIRE 2/4 establece el estándar de comunicaciones
para la conexión serie RS422/485. Para utilizar uno de los
estándares de comunicaciones, realice estos pasos:
/i
fig. 23
A
Estándar de
comunicaciones
RS422 Establezca el interruptor WIRE 2/4 a la derecha
RS485 Establezca el interruptor WIRE 2/4 a la izquierda
Cómo seleccionarlo
Nota
En el modo RS485, el par de transmisión está conectado
al par de recepción.
B
C
D
E
F
G
H
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 72
Page 73

Referencia de hardware
Conector de E/S de 28 pines
El conector de 28 pines es una denominación de conector
Weidmuller:
B2L 3.5/28 LH.
Pin Conexión Pin Conexión
1 Común de entrada 0 V 2 Común de entrada 0 V
3 Entrada 0 4 Entrada 1
5 Entrada 2 6 Entrada 3
7 Entrada 4 8 Entrada 5
9 Entrada 6 10 Entrada 7
11 Entrada 8 12 Entrada 9
13 Entrada 10 14 Entrada 11
15 Entrada 12 16 Entrada 13
17 Entrada 14 18 Entrada 15
19 Salida 8 20 Salida 9
21 Salida 10 22 Salida 11
23 Salida 12 24 Salida 13
25 Salida 14 26 Salida 15
27 Común de salida 0 V 28 Entrada de alimentación
de 24 V para las salidas.
fig. 24/i
1
3
5
7
9
11
13
15
17
19
21
23
25
27
2
4
6
8
10
12
14
16
18
20
22
24
26
28
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 73
Page 74

Referencia de hardware
LEDs 0–7
Los LEDs de E/S reflejan la actividad de las entradas y las salidas.
Puede utilizar el comando DISPLAY=n de BASIC para configurar
los LEDs.
En la tabla siguiente se indica la configuración de los LEDs 0–7
y el comando DISPLAY=n donde n va de 0 a 7.
/i
Etiqueta
de LED
0 IN 0 IN 8 IN 16 IN 24 OUT 0 OUT 8 OUT 16 OUT 24
1 IN 1 IN 9 IN 17 IN 25 OUT 1 OUT 9 OUT 17 OUT 25
2 IN 2 IN 10 IN 18 IN 26 OUT 2 OUT 10 OUT 18 OUT 26
3 IN 3 IN 11 IN 19 IN 27 OUT 3 OUT 11 OUT 19 OUT 27
4 IN 4 IN 12 IN 20 IN 28 OUT 4 OUT 12 OUT 20 OUT 28
5 IN 5 IN 13 IN 21 IN 29 OUT 5 OUT 13 OUT 21 OUT 29
6 IN 6 IN 14 IN 22 IN 30 OUT 6 OUT 14 OUT 22 OUT 30
7 IN 7 IN 15 IN 23 IN 31 OUT 7 OUT 15 OUT 23 OUT 31
n=0 n=1 n=2 n=3 n=4 n=5 n=6 n=7
Por ejemplo, si utiliza el comando DISPLAY=1, el LED 5 refleja
la actividad de la entrada en 13 (pin 16) del conector de E/S
de 28 pines.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 74
Page 75

Referencia de hardware
Entradas digitales
En la tabla e ilustración siguientes se detallan las especificaciones
de las entradas digitales (entrada 0 a entrada 15) para las E/S:
/i
Elemento Especificación
Tipo PNP/NPN
fig. 25
Entrada
TJ 1-MC 16
3
Tensión máxima 24 Vc.c. +10%
Corriente de entrada 5 mA a 24 Vc.c.
Tensión en ON 14,4 Vc.c.
Tensión en OFF 5,0 Vc.c. máx.
Los tiempos dependen del período de servo de MC16 e incluyen
los retardos físicos en el circuito de entrada.
Los tiempos de respuesta máximos de 1.250 µs (para períodos
de servo de 0,5 ms ó 1 ms) ó 2.500 µs (para un período de servo
de 2 ms) se logran entre un cambio en la tensión de entrada
y un cambio correspondiente en el parámetro IN.
Salidas digitales
En la tabla e ilustración siguientes se detallan las especificaciones
de las salidas digitales (O8 a O15):
/i
Elemento Especificación
Tipo PNP
Tensión máxima 24 Vc.c. +10%
Capacidad de corriente 100 mA cada salida (800 mA para un grupo de 8)
Tensión máx. 24 Vc.c. +10%
Protección Sobretensión, sobretemperatura y fusible de 2 A
en Común
Fuente de
alimentación
externa de 24 V
Entrada 0 V
Común de 0 V para circuitos de entrada
fig. 26
Circuito
equivalente
galvánicamente del sistema)
Circuitos internos (aislados
A otros circuitos de salida
1
TJ 1-MC 16
Fusible 2 A
Alimentación de salida 24 V28
19 O8
27
Salida 0 V
Carga
Fuente de
alimentación
externa
24 V
Revisión 3.0
Los tiempos dependen del período de servo de MC16 e incluyen
los retardos físicos en el circuito de salida.
MANUAL DE REFERENCIA DE HARDWARE 75
Page 76

Referencia de hardware
Los tiempos de respuesta máximos de 250 µs de activación
y 350 µs de desactivación (para períodos de servo de 0,5 ms
ó 1 ms) ó 500 µs de activación y 600 µs de desactivación
(para un período de servo de 2 ms) se logran entre un cambio
en la tensión de entrada y un cambio correspondiente
en el circuito de salida digital.
3.4.4 Batería
La batería de reserva proporciona alimentación a la RAM,
donde se almacenan los programas y las variables globales,
y el reloj de tiempo real cuando se desconecta la alimentación.
Debe cambiarla cada cinco años. La referencia de la batería
auxiliar es CJ1W-BAT01.
Para sustituir la batería la alimentación no debe estar
desconectada más de cinco minutos para garantizar
que no se pierde la memoria de reserva. Si la TJ1-MC__
no ha estado conectada, encienda la unidad durante cinco
minutos como mínimo antes de sustituir la batería, de no
hacerlo así, el condensador que proporciona alimentación
de reserva a la memoria no se carga por completo
y la memoria de reserva se puede perder antes
de que se inserte la nueva batería.
fig. 27
A
B
C
D
E
F
G
H
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 76
Page 77

Referencia de hardware
3.4.5 Especificaciones de TJ1-MC__
/i
Elemento Especificación
TJ1-MC04 TJ1-MC16
Fuente de alimentación 5 Vc.c. y 24 Vc.c. (suministrados por una fuente
de alimentación)
Consumo total 3,3 W
Consumo 650 mA a 5 Vc.c.
Peso aproximado 230 g
Número de ejes 5 (hasta 4 ejes en
MECHATROLINK-II)
Número de variadores y E/S Hasta 8 en
MECHATROLINK-II
Número de unidades TJ1-ML__ Hasta 4 Hasta 4
Reloj de tiempo real Sí
Período de servo 0,5 ms, 1 ms ó 2 ms
Lenguaje de programación Lenguaje Motion Control tipo BASIC
Multitarea Hasta 14 tareas
E/S digital 16 entradas digitales y 8 salidas digitales,
que se pueden configurar libremente
Unidades de medida Definibles por el usuario
Memoria disponible para
programas de usuario
Capacidad de almacenamiento
de datos
Almacenamiento de datos
de programa en la TJ1-MC__
Almacenamiento de datos
Revisión 3.0
de programa en el PC
500 kB
Hasta 2 MB de almacenamiento de datos en memoria
flash
• Copia de seguridad de RAM y memoria flash
• Batería de reserva
El software Trajexia Tools gestiona las copias
de seguridad en el disco duro del PC
16
Hasta 8 en
MECHATROLINK-II
Elemento Especificación
TJ1-MC04 TJ1-MC16
Conectores de comunicaciones • 1 conexión Ethernet
• 2 conexiones serie
Actualización de firmware Mediante el software Trajexia Tools
Características eléctricas
del conector Ethernet
Conector Ethernet RJ45
Conforme con IEEE 802.3 (100BaseT)
Conector serie 1 y 2
/i
Elemento Especificación
Características eléctricas • PORT1: RS232C, no aislado
• PORT2: RS485/RS422A, aislado
Conector Conector SUB-D9
Velocidad de transmisión 1200, 2400, 4800, 9600, 19200 y 38400 bps
Formato de transmisión, longitud
de bit de datos
Formato de transmisión, bit de parada 1 ó 2 bits
Formato de transmisión, bit de paridad Par/Impar/Ninguno
Modo de transmisión • RS232C: Punto a punto (1:1)
Protocolo de transmisión • Protocolo de maestro Host Link
Aislamiento galvánico Sólo conector RS422/485
Buffers de comunicaciones 254 bytes
Control de flujo Ninguno
Terminador Sí, seleccionado mediante interruptor
Longitud máxima de cable • RS232C: 15 m
7 u 8 bits
• RS422/485: Punto a multipunto (1:N)
• Protocolo de esclavo Host Link
• ASCII de propósito general
• RS422/485: 100 m
MANUAL DE REFERENCIA DE HARDWARE 77
Page 78

Referencia de hardware
3.4.6 TJ1-TER
La TJ1-TER garantiza que el bus de datos interno del sistema
Trajexia funciona correctamente. Un sistema Trajexia siempre
debe contener una TJ1-TER como la última unidad.
3.4.7 Contenido de la caja de TJ1-MC__
• Hoja de seguridad.
• TJ1-MC__ (batería incluida).
• Etiqueta de protección colocada en la superficie superior
de la TJ1-MC__.
• TJ1-TER, conectada a la TJ1-MC__.
• Piezas para un conector serie.
• Piezas para un conector de E/S.
• Dos presillas metálicas para carril DIN para que el sistema
Trajexia no se caiga del carril.
• Presilla blanca, para sustituir la amarilla de la fuente
de alimentación.
fig. 28
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 78
Page 79

Referencia de hardware
3.5 TJ1-ML__
3.5.1 Introducción
La TJ1-ML__ controla los dispositivos MECHATROLINK-II de
un modo cíclico y determinista. Los esclavos MECHATROLINK-II
pueden ser:
• Servodrivers.
• Variadores.
•E/S.
La TJ1-ML__ tiene estos componentes visibles:
/i
Componente Descripción
A Indicadores LED
B Conector de bus CN1 MECHATROLINK-II
La TJ1-ML__ y sus dispositivos componen una red serie.
La primera unidad de la red es la TJ1-ML__.
• Una unidad TJ1-ML16 puede controlar 16 dispositivos.
Una unidad TJ1-ML04 puede controlar 4 dispositivos.
fig. 29
ML16
RUN
8F
CN1
A
B
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 79
Page 80

Referencia de hardware
3.5.2 Descripción de LED
/i
Etiqueta Estado Descripción
Run apagado Fallo de la prueba de inicio. La unidad no funciona.
Funcionamiento detenido. Error grave.
encendido Prueba de inicio correcta. Operación normal
BF apagado Operación normal
encendido Fallo en el bus MECHATROLINK-II
– Reservado
3.5.3 Conexión de TJ1-ML__
El conector de bus MECHATROLINK-II (A) encaja
en un conector MECHATROLINK-II. Utilice este conector
para conectar la TJ1-ML__ a una red MECHATROLINK-II.
La red MECHATROLINK-II siempre debe estar cerrada
por la terminación de MECHATROLINK-II.
Revisión 3.0
fig. 30
ML16
RUN
8F
CN1
A
MANUAL DE REFERENCIA DE HARDWARE 80
Page 81

Referencia de hardware
Conexiones de ejemplo
Ejemplo 1
• 1 unidad TJ1-MC__
• 1 unidad TJ1-ML__
• 3 servodrivers Sigma-II
• 1 terminación de MECHATROLINK-II
fig. 31
Servodriver
Todas las direcciones Mechatrolink
están numeradas 4x (hasta 16 por unidad)
Dirección
43
Eje 2 Eje 3 Eje 4
Dirección44Dirección
45
Terminador
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 81
Page 82

Referencia de hardware
Ejemplo 2
• 1 unidad TJ1-MC16
• 2 unidades TJ1-ML16
• 16 servodrivers Sigma-II
• 2 terminaciones de MECHATROLINK-II
fig. 32
Servodriver
Dirección41Dirección42Dirección43Dirección44Dirección45Dirección46Dirección47Dirección
48
Eje 0
Dirección
49
Eje 1
Dirección4ADirección4BDirección4CDirección4DDirección4EDirección4FDirección
Eje 2
Eje 3
Eje 4
Eje 5
Eje 6
Eje 7
50
Terminador
Terminador
Eje 8
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 82
Eje 9
Eje 10
Eje 11
Eje 12
Eje 13
Eje 14
Eje 15
Page 83

Referencia de hardware
Las unidades MECHATROLINK-II pueden controlar distintas
combinaciones de ejes, variadores y unidades de E/S.
Ejemplo 3
• 1 unidad TJ1-MC__
• 1 unidad TJ1-ML16
• 1 servodriver Sigma-II
• 1 variador
• 3 unidades E/S
• 1 terminación de MECHATROLINK-II
VARIADORES
Todas las direcciones de variador
están numeradas 2x
(rango válido de 20 a 2F)
Dirección
41
Dirección
21
fig. 33
UNIDADES DE E/S
Las direcciones de E/S están numeradas 6x
(rango válido de 60 a 6F)
Dirección de E/S seleccionada en interruptores DIP
Dirección
61
Asignaciones de memoria de E/S
Dirección
62
Dirección
63
Terminador
0 31 32 95 96 159 160 223 224
Eje 0
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 83
Page 84

Referencia de hardware
3.5.4 Especificaciones de TJ1-ML__
/i
Elemento Especificación
TJ1-ML04 TJ1-ML16
Fuente de alimentación 5 Vc.c. (suministrados por la TJ1-MC__)
Consumo total 1,0 W
Consumo 200 mA a 5 Vc.c.
Peso aproximado 75 g
Número de dispositivos controlados 4 16
Dispositivos controlados • Servodrivers Sigma-II, Junma-ML y Sigma-III
•E/S
• Variadores de frecuencia V7, F7 y G7
Características eléctricas Conforme con el estándar MECHATROLINK-II
Conexión de comunicaciones 1 conector maestro MECHATROLINK-II
Velocidad de transmisión 10 Mbps
Período de servo 0,5 ms, 1 ms ó 2 ms
Distancia de transmisión sin repetidor Hasta 50 m
Dispositivos relacionados con TJ1-ML__
/i
Nombre Observaciones Modelo
Módulos de E/S
distribuidas
Entrada digital de 64 puntos y salida
digital de 64 puntos (24 Vc.c., NPN)
Entrada digital de 64 puntos y salida
digital de 64 puntos (24 Vc.c., PNP)
JEPMC-IO2310
JEPMC-IO2330
Nombre Observaciones Modelo
Cables
MECHATROLINK-II
Terminación
MECHATROLINK-II
Unidad de interfaz
MECHATROLINK-II
0,5 metros JEPMC-W6003-A5
1 metros JEPMC-W6003-01
3 metros JEPMC-W6003-03
5 metros JEPMC-W6003-05
10 metros JEPMC-W6003-10
20 metros JEPMC-W6003-20
30 metros JEPMC-W6003-30
Resistencia de terminación JEPMC-W6022
Para servodrivers serie Sigma-II
(firmware versión 39 o posterior)
Servodrivers de la serie Junma SJDE-__ANA-OY
Para variador Varispeed V7
(consulte los detalles de las versiones
admitidas del variador a la oficina
de ventas de OMRON).
Para variador Varispeed F7, V7
(consulte los detalles de las versiones
admitidas del variador a la oficina
de ventas de OMRON).
JUSP-NS115
SI-T/V7
SI-T
Revisión 3.0
Entrada analógica: –10 V a +10 V,
4 canales
Salida analógica: –10 V a +10 V,
2 canales
JEPMC-AN2900
JEPMC-AN2910
MANUAL DE REFERENCIA DE HARDWARE 84
Page 85

Referencia de hardware
3.5.5 Contenido de la caja de TJ1-ML__
Caja de unidad de interfaz MECHATROLINK-II:
• Hoja de seguridad.
• TJ1-ML__.
• Etiqueta de protección colocada en la superficie superior
de la unidad.
3.5.6 Servodrivers MECHATROLINK-II de la serie
Sigma-II
Un servodriver MECHATROLINK-II está diseñado para
realizar control de posición en Trajexia. En cada ciclo de
MECHATROLINK-II, la TJ1-MC__ recibe la realimentación
de posición del servodriver mediante la TJ1-ML__. La TJ1-MC__
envía la posición de destino, velocidad o par al receptor, según
el tipo de eje.
Las otras funciones del servodriver están disponibles
pero se actualizar con una frecuencia menor.
La TJ1-MC__ considera un servodriver como un eje.
Cuando conecta un servo al Trajexia, el parámetro no cambia
automáticamente por lo que, según la aplicación, es posible
que tenga que cambiar los valores.
Para conectar un servodriver Sigma-II a un sistema Trajexia,
se debe conectar una interfaz JUSP-NS115 MECHATROLINK-II
a su DPRAM.
Para obtener detalles de las conexiones de Sigma-II, consulte
el manual.
fig. 34
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 85
Page 86

Referencia de hardware
Indicadores LED en NS115
LED Color Descripción
Alarma Rojo Iluminado: se ha producido una alarma
Apagado: no hay ninguna alarma activa
Listo Verde Iluminado: comunicaciones activas
Apagado: ninguna comunicación en curso
fig. 35/i
A
B
C
Ajustes de dirección (SW1 y SW2)
Los interruptores DIP (B) del NS115 configuran los ajustes
de comunicación.
Interruptor
DIP
1 Velocidad
2 Longitud
3 Rango
4 Mantenimiento
Función Ajuste Descripción
ON 10 Mbps
de transmisión
ON Transmisión de datos de 32 bytes
de datos
OFF Direcciones 40-4F
de direcciones
ON Direcciones 50-5F
OFF Siempre debe estar en OFF.
(reservado)
No se utiliza en ON.
C
fig. 36/i
234
1
ON OFF
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 86
Page 87

Referencia de hardware
Ajuste el selector de dirección (A, fig. 35) del NS115 en n
(donde n va de 0 a F) para asignar la siguiente dirección al NS115:
/i
Número de
interruptor
rotativo
1OFF410
2OFF421
3OFF432
4OFF443
5OFF454
6OFF465
7OFF476
8OFF487
9OFF498
AOFF4A9
BOFF4B10
COFF4C11
DOFF4D12
EOFF4E13
Interruptor
DIP 3
Dirección
de estación
Eje en controlador Motion
fig. 37
FOFF4F14
0ON5015
No utilice las direcciones 40 y 51-5F. Utilice sólo las
direcciones 41–50.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 87
Page 88

Referencia de hardware
Conectores MECHATROLINK (CN1A y CN1B)
Realice la conexión a la red MECHATROLINK-II tal como se indica
en la figura mediante un cable MECHATROLINK-II adecuado.
Ambos conectores están en paralelo, por lo que puede conectar
ambos cables a los dos conectores. Conecte una resistencia
de terminación MECHATROLINK-II en uno de los conectores
si el servodriver es el último dispositivo de la red.
Conector de encoder completamente cerrado CN4
CN4 se utiliza para conectar un encoder completamente cerrado,
es decir, la posición se controla según un encoder externo y el lazo
de velocidad y par según el encoder de motor. Se utiliza al instalar
el motor en máquinas donde se tiene que realizar la medición
directamente en la carga porque:
• Hay deslizamiento u holgura en la transmisión mecánica.
• La precisión requerida es muy alta.
fig. 38
El encoder admitido es line driver y la disposición de pines
se muestra en la figura.
En la tabla siguiente se muestra la disposición de terminales
del conector CN4 y sus especificaciones.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 88
Page 89

Referencia de hardware
1PG0V Masa
2PG0V Masa
3PG0V Masa
4– –
5– –
6– –
7– –
8– –
9– –
10 – –
11 – –
12 – –
13 – –
14 FC Entrada + de fase C
15 /FC Entrada – de fase C
16 FA Entrada + de fase A
fig. 39/i
NS115
CN4
1,2,3
16
17
18
19
14
15
PG0V
FA
/FA
FB
/FB
FC
/FC
Fuente de
alimentación externa
GND
A
/A
B
/B
Z
/Z
PG externo
17 /FA Entrada – de fase A
18 FB Entrada + de fase B
19 /FB Entrada – de fase B
20 – –
Nota.
Asegúrese de que se utiliza cable apantallado y de que
la pantalla está conectada a la carcasa del conector.
Revisión 3.0
Parámetros de servo relevantes que están relacionados
con el uso de Trajexia:
MANUAL DE REFERENCIA DE HARDWARE 89
Page 90

Referencia de hardware
Resolución de relación de engranaje del encoder:
Estos dos parámetros definen las unidades del sistema en
combinación con UNITS.
• Pn202: numerador de relación de engranaje. El valor
predeterminado es 4, configúrelo en 1 para obtener
la resolución máxima del encoder.
• Pn203: denominador de relación de engranaje.
Valor predeterminado = 1.
Encoder absoluto
• Pn205 = número de límite de multigiro. Valor predeterminado
65535. Configúrelo en un valor adecuado en combinación
con la relación de engranaje del encoder y UNITS.
Encoder completamente cerrado
• Pn002.3: 0=desactivado, 1=uso sin Z, 2=uso con Z,
3=uso sin rotación inversa Z, 4=uso con rotación inversa Z.
• Pn206: número de impulsos de encoder completamente
cerrado por revolución. Valor predeterminado 16384
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 90
Page 91

Referencia de hardware
Uso de las entradas digitales de servodriver con Trajexia
• Pn511: asignación de las entradas de registro.
• Pn81E: asignación de las entradas normales.
Para poder leer todas las entradas de servodriver desde Trajexia,
se recomienda la siguiente configuración:
/i
Ajuste de
parámetro
Pn81E=4321 CN1-40 DRIVE_INPUTS bit 12
Pn511=654X CN1-44 DRIVE_INPUTS bit 06
Para el resto de los parámetros y conexiones, consulte el manual
de Sigma-II.
Entrada en Sigma-II Bit en Trajexia
CN1-41 DRIVE_INPUTS bit 13
CN1-42 DRIVE_INPUTS bit 14
CN1-43 DRIVE_INPUTS bit 15
CN1-45 DRIVE_INPUTS bit 07
CN1-46 DRIVE_INPUTS bit 08
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 91
Page 92

Referencia de hardware
3.5.7 Servodrivers MECHATROLINK-II de la serie
Junma
También puede conectar un servodriver Junma a un sistema
Trajexia.
/i
Etiqueta Terminal/LED Descripción
A FIL Interruptor rotativo para ajuste de filtro
de referencia
B CN6A y CN6B Conectores de bus MECHATROLINK-II
C CN1 Conector de señal de E/S
D CN2 Conector de entrada del encoder
E SW1 Interruptor rotativo para ajuste de dirección
de MECHATROLINK-II
F SW2 Interruptores DI para el ajuste de las
comunicaciones de MECHATROLINK-II
G RDY Indicador de estado del servo
H ALM Indicador de alarma
I COM Indicador de estado de comunicaciones
de MECHATROLINK-II
J CNA Conector de fuente de alimentación
K CNB Conector de servomotor
Indicadores LED
/i
LED Descripción
COM Iluminado: comunicaciones de MECHATROLINK-II en curso
Apagado: sin comunicaciones MECHATROLINK-II
ALM Iluminado: se ha producido una alarma
Apagado: no hay ninguna alarma
RDY Iluminado: la alimentación está conectada, en standby
Revisión 3.0
para el establecimiento de comunicaciones
Parpadeando: estado Servo ON
fig. 40
A
B
C
D
J
FIL
CN6
A/B
CN1
CN2
PWR
COM
ALM
RDY
4
5
3
6
2
7
1
8
0
9
F
A
E
B
D
C
L1
L2
U
V
W
K
CNBCNA
4
5
3
6
2
7
1
8
0
9
A
F
ON
B
E
C
D
1
G
H
I
E
F
MANUAL DE REFERENCIA DE HARDWARE 92
Page 93

Referencia de hardware
Ajuste de comunicaciones (SW2)
Los 4 interruptores DIP configuran los ajustes de comunicaciones.
/i
Interruptor
DIP
1 Reservado ON Siempre se debe configurar en ON.
2 Longitud
3 Rango
4 Ajuste de filtro OFF Ajustar el filtro con el interruptor
Función Ajuste Descripción
OFF no se utiliza.
ON 32 bytes
de datos
OFF Direcciones 40-4F
de direcciones
ON Direcciones 50-5F
rotativo FIL
ON Configurar el filtro con Pn00A
fig. 41
1 234
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 93
Page 94

Referencia de hardware
Ajustes de dirección (SW1)
Ajuste el selector de dirección del servodriver Junma en n
(donde n va de 0 a F) para asignarle la siguiente dirección
de estación:
/i
fig. 42
Número de
interruptor
rotativo
1OFF41 0
2 OFF 42 1
3OFF43 2
4OFF44 3
5OFF45 4
6OFF46 5
7OFF47 6
8OFF48 7
9OFF49 8
AOFF4A 9
B OFF 4B 10
COFF4C 11
D OFF 4D 12
E OFF 4E 13
F OFF 4F 14
0ON50 15
Interruptor
DIP 3
Dirección
de estación
Eje en controlador Motion
No utilice las direcciones 40 y 51-5F. Utilice sólo las direcciones
41–50.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 94
Page 95

Referencia de hardware
Conector de señal de E/S CN1
En la tabla siguiente se muestra la disposición de pines
del conector de señal de E/S (CN1).
/i
Pin E/S Código Nombre de señal
1 Entrada /EXT1 Enclavamiento externo
2 Entrada /DEC Deceleración de retorno al inicio
3 Entrada N_OT Prohibición de marcha inversa
4 Entrada P_OT Prohibición de marcha directa
5 Entrada +24VIN Fuente de alimentación de entrada
externa
6 Entrada E-STP Parada de emergencia
7 Salida SG-COM Tierra de señal de salida
8N/C
9N/C
10 N/C
11 N /C
12 Salida ALM Alarma de servo
13 Salida /BK Freno
14 N/C
Carcasa – – FG
fig. 43
891011121314
1234567
Conectores MECHATROLINK-II (CN6A y CN6B)
Conecte el servodriver Junma a la red MECHATROLINK-II
con los conectores CN6A y CN6B. Utilice uno de los conectores
MECHATROLINK-II para realizar la conexión al dispositivo
MECHATROLINK-II anterior o al TJ1-ML__. Utilice el otro
conector MECHATROLINK-II para realizar la conexión al
dispositivo MECHATROLINK-II siguiente o para conectar
a una terminación MECHATROLINK-II.
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 95
Page 96

Referencia de hardware
Conector de entrada del encoder CN2
En la tabla siguiente se muestra la disposición de pines
del conector del servodriver Junma.
/i
Pin Señal
1PG5V
2PG0V (GND)
3Fase A (+)
4 Fase A (-)
5Fase B (+)
6 Fase B (-)
7Fase/Z
8Fase U
9Fase V
10 Fase W
Carcasa –
Conector de la fuente de alimentación CNA
En la tabla siguiente se muestra la disposición de pines
del conector de fuente de alimentación CNA.
/i
Pin Señal Nombre
1 L1 Terminal de fuente de alimentación
2 L2 Terminal de fuente de alimentación
3 + Terminal de conexión de unidad regenerativa
4 – Terminal de conexión de unidad regenerativa
fig. 44
fig. 45
97531
46810
A
N
2
1
2
3
4321
Revisión 3.0
4
MANUAL DE REFERENCIA DE HARDWARE 96
Page 97

Referencia de hardware
Conector de servomotor CNB
En la tabla siguiente se muestra la disposición de pines
del conector de servomotor CNB.
/i
Pin Señal Nombre
1 U Fase U
2 V Fase V
3 W Fase W
4N/C
fig. 46
1
A
1
N
2
2
34
3
4
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 97
Page 98

Referencia de hardware
3.5.8 Variador V7 MECHATROLINK-II
Hay un variador V7 con una interfaz MECHATROLINK-II diseñado
para realizar el control de velocidad y par (si el variador admite
esta función) de un motor de inducción de c.a. No se admite
el control de posición mediante MECHATROLINK-II.
La TJ1-MC__ no considera un variador como un eje.
En la ilustración se muestra el aspecto externo de la unidad SI-T/V7.
A. LED
B. Conector modular (CN10)
C. Conector opcional (CN1)
D. Conector de comunicaciones (CN2)
E. Interruptor DIP
F. Interruptor rotativo
G. Terminal de tierra
H. Conector de comunicaciones (CN2)
fig. 47
A C
HGF D
B
E
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 98
Page 99

Referencia de hardware
Indicadores LED
Los indicadores LED muestran el estado de las comunicaciones
de MECHATROLINK-II y la unidad SI-T/V7.
A. Run
B. TX
C. RX
D. ERR
/i
Nombre Display Explicación
Color Estado
RUN Verde Iluminado Operación normal
– Apagado Comunicaciones de CPU paradas, reset
de hardware, error de comprobación de
RAM, error de comprobación de DRAM,
error de ajuste de dirección de estación
o error de código de modelo de variador
ERR Rojo Iluminado
Rojo Parpadeando
– Apagado No hay errores de comunicaciones
TX Verde Iluminado Se están enviando datos
– Apagado Se ha detenido el envío de datos,
Revisión 3.0
RX Verde Iluminado Búsqueda de portadora de recepción
– Apagado No se ha encontrado portadora
Error de tiempo de espera de watchdog,
error de comunicaciones o reset de hardware
Error de comprobación de ROM (una vez)*,
error de comprobación de RAM (dos veces)*,
error de comprobación de DRAM (tres
veces)*, error de autodiagnóstico ASIC
de comunicaciones (cuatro veces)*,
error de comprobación de RAM de ASIC
(cinco veces)*, error de ajuste de dirección
de estación (seis veces)*, error de código
de modelo de variador (siete veces)*
*: indica el número de parpadeos
ni de autodiagnóstico
reset de hardware
de recepción, reset de hardware
fig. 48
DBA C
MANUAL DE REFERENCIA DE HARDWARE 99
Page 100

Referencia de hardware
Interruptor DIP
En la siguiente tabla se muestran los ajustes de interruptor DIP
de la unidad SI-T/V7.
Nombre Etiqueta Estado Función
Velocidad
de transmisión
S1-1 ON 10 Mbps (MECHATROLINK-II)
fig. 49/i
Longitud
de datos
Dirección
de estación
Mantenimiento S1-4 OFF Normalmente desactivo
S1-2 ON Transmisión de datos de 32 bytes
(MECHATROLINK-II)
S1-3 OFF Configurar el décimo dígito del número
de estación en 2. No es válido si el
número máximo de unidades, incluida
la S2, del interruptor rotativo es 20.
ON Configurar el décimo dígito del número
de estación en 3. No es válido si el
número máximo de unidades, incluida
la S2, del interruptor rotativo es 3F.
ON No se utiliza
1. Para mantenimiento. Deje siempre este interruptor en OFF.
1234
OFF
1
Revisión 3.0
MANUAL DE REFERENCIA DE HARDWARE 100
 Loading...
Loading...