

Page 1
Machine Automation Controller NJ-series
EtherCAT(R) Connection Guide
IAI Corporation
SCON-CA/SCON-CAL Controller
P585-E1-02
Page 2
About Intellectual Property Rights and Trademarks
EtherCAT(R) is registered trademark and patented technology, licensed by Beckhoff Automation
Microsoft product screen shots reprinted with permission from Microsoft Corporation.
Windows is a registered trademark of Microsoft Corporation in the USA and other countries.
GmbH, Germany.
Sysmac is a trademark or registered trademark of OMRON Corporation in Japan and other
countries for OMRON factory automation products.
Company names and product names in this document are the trademarks or registered
trademarks of their respective companies.
Page 3

T a ble of Co ntent s
1. Related Manuals .......................................................................................... 1
2. T erms and Definitions ................................................................................. 2
3. Precautions .................................................................................................. 3
4. Overview ...................................................................................................... 4
5. Applicable Devices and Dev ice Configuration ........................................ 5
5.1. Applicable Devices .................................................................................. 5
5.2. Device Configuration ............................................................................... 6
6. EtherCAT Settings ....................................................................................... 8
6.1. Parameter Settings ................................................................................. 8
6.2. Device Variables ...................................................................................... 9
7. EtherCAT Connection Procedure ............................................................. 11
7.1. Work Flow .............................................................................................. 11
7.2. Setting up the IAI SCON-CA Controller ................................................ 12
7.3. Setting up the Controller ....................................................................... 19
7.4. Checking the EtherCAT Communications............................................. 30
8. Initialization Method .................................................................................. 35
8.1. Initializing the Controller ........................................................................ 35
8.2. Initializing the IAI SCON-CA Controller ................................................. 35
9. Revision History ........................................................................................ 36
Page 4
1.Related Manuals
1
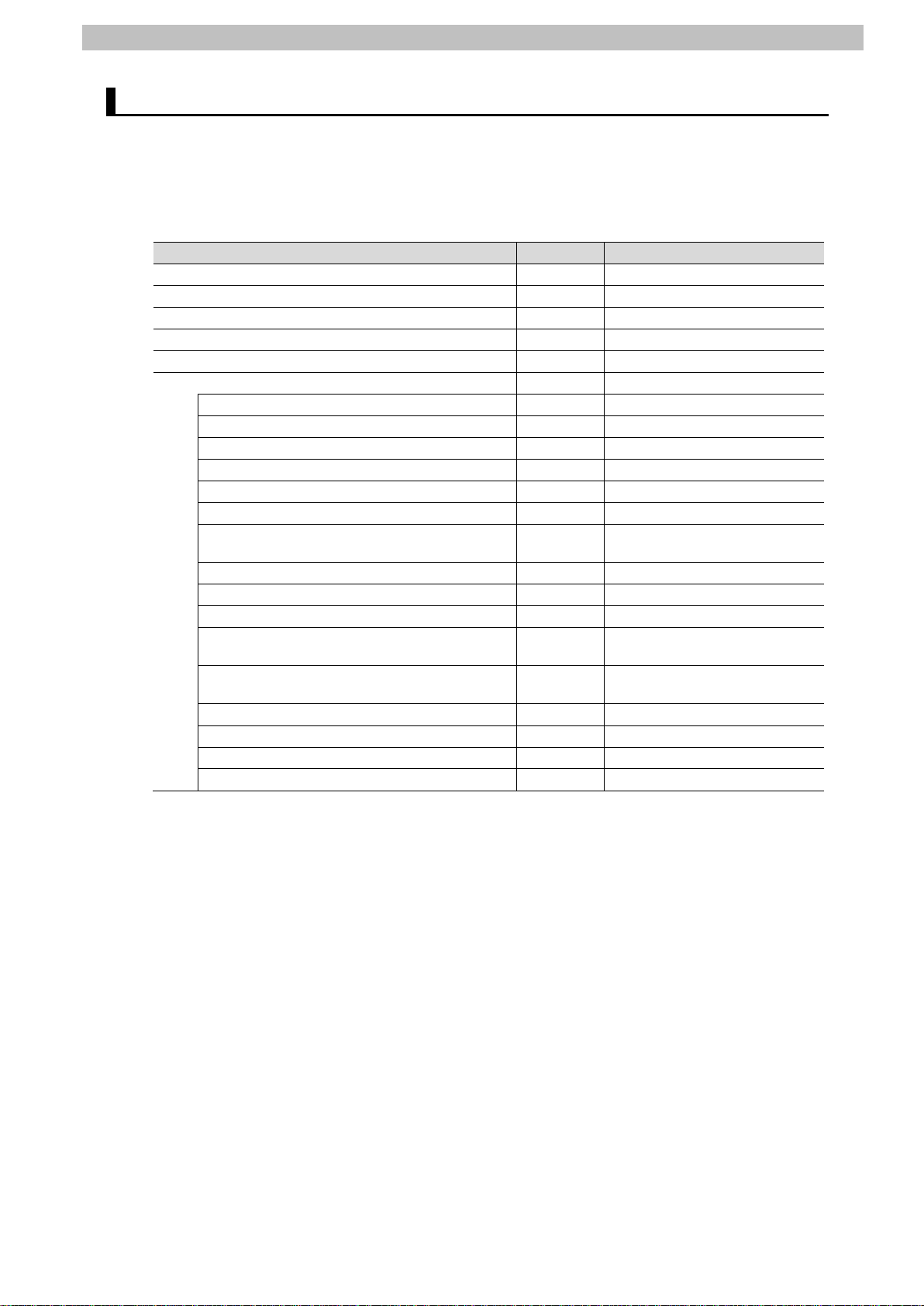
1. Related Manuals
To ensure system safety, make sure to always read and heed the information provided in all
Safety Precautions and Precautions for Safe Use of manuals for each device which is used in
the system.
The table below lists the manuals of IAI Corporation (hereinafter referred to as IAI) and
OMRON Corporation (hereinafter referred to as OMRON) related to this document.
Manufacturer Cat. No. Model Manual name
OMRON W500 NJ501-[][][][]
NJ301-[][][][]
OMRON W501 NJ501-[][][][]
NJ301-[][][][]
OMRON W505 NJ501-[][][][]
NJ301-[][][][]
OMRON W504 SYSMAC-SE2[][][] Sysmac Studio Version 1 Operation Manual
IAI ME0243 SCON-CA
SCON-CAL
IAI ME0273 SCON-CA
SCON-CAL
IAI ME0155 RCM-101-MW
RCM-101-USB
NJ-series CPU Unit Hardware User's Manual
NJ-series CPU Unit Software User's Manual
NJ-series CPU Unit Built-in EtherCAT(R) Port
User's Manual
SCON-CA/CAL/CGAL Controller Instruction
Manual
EtherCAT Operation Manual
PC Software RCM-101-MW, RCM-101-USB
Operation Manual
Page 5
2.Terms and Definitions
2
With Axis Variables for Servo Drive and encoder input slave to
The ESI files contain information unique to the EtherCAT slaves
2. Terms and Definitions
Ter m Explanation and Definition
PDO Communications
(Communications using
Process Data Objects)
SDO Communications
(Communications using
Service Data Objects)
Slave unit There are various types of slaves such as Servo Drives that
Node address A node address is an address to identify a unit connected to
ESI file
(EtherCAT Slave Information
file)
This method is used for cyclic data exchange between the
master unit and the slave units.
PDO data (i.e., I/O data that is mapped to PDOs) that is
allocated in advance is refreshed periodically each EtherCAT
process data communications cycle (i.e., the period of primary
periodic task).
The NJ-series Machine Automation Controller uses the PDO
Communications for commands to refresh I/O data in a fixed
control period, including I/O data for EtherCAT Slave Units, and
the position control data for the Servomotors.
It is accessed from the NJ-series Machine Automation
Controller in the following ways.
・With device variables for EtherCAT slave I/O
・
which assigned as an axis
This method is used to read and write the specified slave unit
data from the master unit when required.
The NJ-series Machine Automation Controller uses SDO
Communications for commands to read and write data, such as
for parameter transfers, at specified times.
The NJ-series Machine Automation Controller can read/write
the specified slave data (parameters and error information, etc.)
with the EC_CoESDORead (Read CoE SDO) instruction or the
EC_CoESDOWrite (Write CoE SDO) instruction.
handle position data and I/O terminals that handle the bit
signals. The slave unit receives output data sent from the
master, and sends input data to the master.
EtherCAT.
in XML format.
Installing an ESI file enables the Sysmac Studio to allocate
slave process data and make other settings.
Page 6
3.Precautions
3
Indicates a potentially hazardous situation which, if not avoided,
damage.
Precautions for Correct Use
Additional Inf or mation
Symbol
3. Precautions
(1) Understand the specifications of devices which are used in the system. Allow some
margin for ratings and performance. Provide safety measures, such as installing safety
circuit in order to ensure safety and minimize risks of abnormal occurrence.
(2) To ensure system safety, make sure to always read and heed the information provided in
all Safety Precautions and Precautions for Safe Use of manuals for each device which is
used in the system.
(3) The user is encouraged to confirm the standards and regulations that the system must
conform to.
(4) It is prohibited to copy, to reproduce, and to distribute a part or the whole of this
document without the permission of OMRON Corporation.
(5) The information contained in this document is current as of January 2015. It is subject to
change without notice for improvement.
The following notation is used in this document.
will result in minor or moderate injury, or may result in serious
injury or death. Additionally there may be significant property
Indicates a potentially hazardous situation which, if not avoided,
may result in minor or moderate injury or property damage.
Precautions on what to do and what not to do to ensure proper operation and performance.
Additional information to read as required.
This information is provided to increase understanding or make operation easier.
The filled circle symbol indicates operations that you must do.
The specific operation is shown in the circle and explained in text.
This example shows a general precaution for something that must do.
Page 7

4.Overview
4
4. Overview
This document describes the procedure for connecting SCON-CA/SCON-CAL Controller of
IAI to NJ-series Machine Automation Controller (hereinafter referred to as the Controller) of
OMRON via EtherCAT and provides the procedure for checking their connection.
Refer to Section 6. Ether C AT Settings and Section 7. Et herCAT Connection Proced ur e to
understand the setting method and key points to operate PDO Communications of EtherCAT.
Page 8
5.Applicable Devices and Device Configuration
5
Precautions for Correct Use
Additional Inf or mation
Additional Inf or mation
Contact IAI Corporation for actuators connectable to SCON-CA/SCON-CAL Controllers.
5. Applicable De vices and Device Co nfiguration
5.1. Applicable Devices
The applicable devices are as follows:
Manufacturer Name Model
OMRON NJ-series CPU Unit NJ501-[][][][]
NJ301-[][][][]
IAI SCON-CA Controller
SCON-CAL Controller
IAI Actuator -
As applicable devices above, the devices with the models and versions listed in Section 5. 2.
are actually used in this document to describe the procedure for connecting devices and
checking the connection.
You cannot use devices with versions lower than the versions listed in Section 5.2.
To use the above devices with models not listed in S ection 5.2. or versions higher than those
listed in Section 5. 2., check the differences in the specifications by referring to the manuals
before operating the devices.
SCON-CA-[]-EC-[]
SCON-CAL-[]-EC-[]
This document describes the procedure to establish the network connection. It does not
provide information on operation, installation or wiring method which is not related to the
connection procedure. It also does not describe the functionality or operation of the devices.
Refer to the manuals or contact the device manufacturer.
(IAI Corporation http://www.intelligentactuator.com/)
This URL is the latest address at the time of this document creation. Contact each device
manufacturer for the latest information.
Page 9
5.Applicable Devices and Device Configuration
6
Manufacturer
Name
Model
Version
OMRON
CPU Unit
(Built-in EtherCAT port)
NJ501-1500
Ver.1.09
OMRON
Power Supply Unit
NJ-PA3001
OMRON
Sysmac Studio
SYSMAC-SE2[][][]
Ver.1.10
-
Personal computer
(OS: Windows 7)
-
-
USB cable
(USB 2.0 type B connector)
-
OMRON
Ethernet cable (with industrial
Ethernet connector)
XS5W-T421-[]M[]-K
IAI
SCON-CA Controller
SCON-CA-60I-EC-0-1
Rev.0x0001
0007
IAI
USB cable
CB-SEL-USB010
IAI
USB conversion unit
RCB-CV-USB
IAI
Communication cable
CB-RCA-SIO050
IAI
Actuator
RCS2-GD5N-I-60-10-50-T2-P
IAI
Motor cable
CB-RCC-MA010
IAI
Encoder cable
CB-RCS2-PA010
IAI
PC Interface Software for RC
RCM-101-MW
RCM-101-USB
Ver.9 .07.00.
00-E
IAI
ESI file
ESI_IAI_CON_ECT_V_1_07_
Rev_0.xml
Precautions for Correct Use
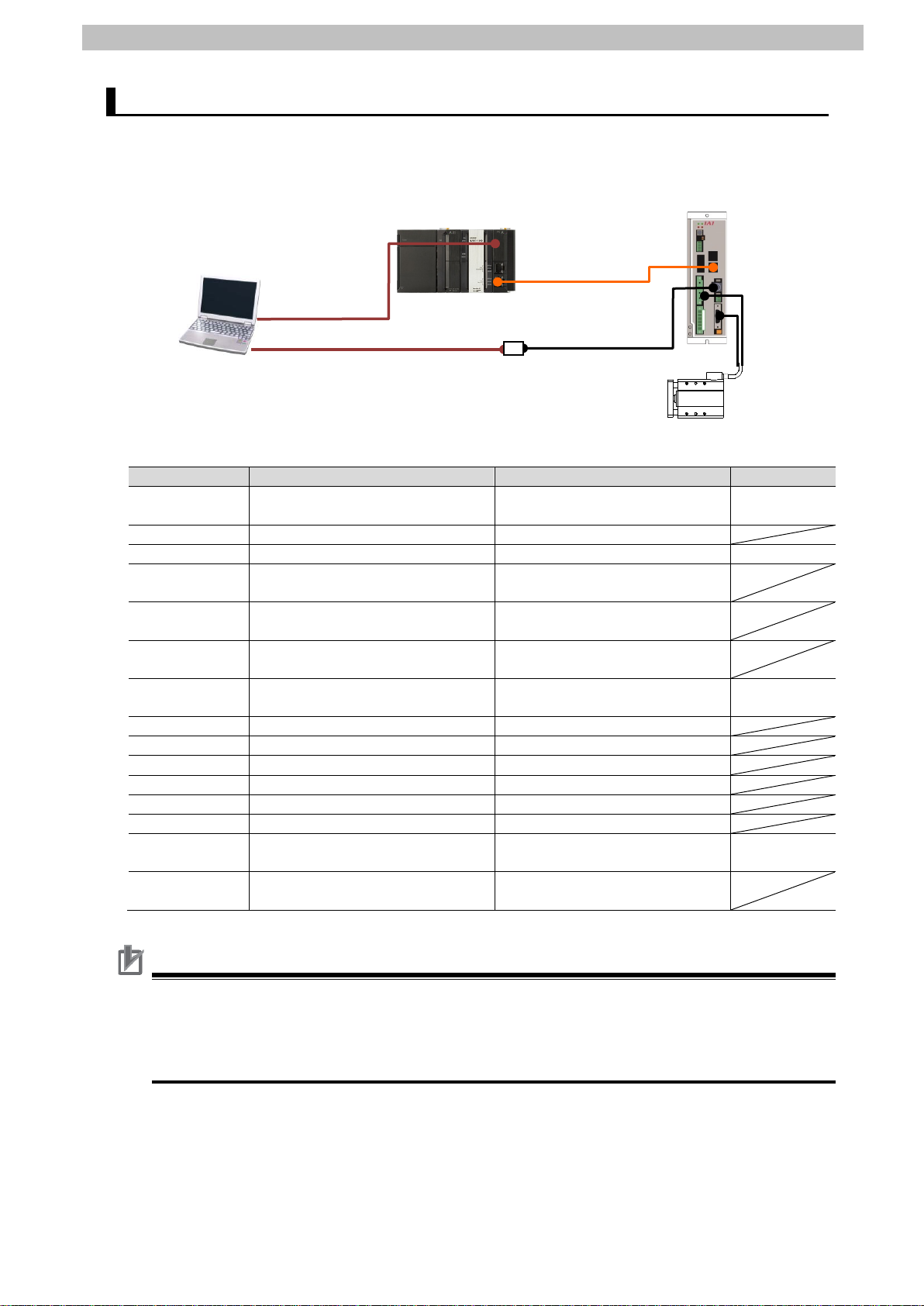
NJ501-1500
SCON-CA-60I-EC-0-1
RCS2-GD5N-I-60-10-50-T2-P
Personal computer
Motor cable
USB cable + USB conversion unit + Communication cable
Encoder cable
5.2. Device Configuration
The hardware components to reproduce the connection procedure of this document are as
follows:
(Sysmac Studio, PC
Interface Software for RC
installed, OS: Windows 7)
USB cable
(Built-in EtherCAT port)
Ethernet cable
Prepare the ESI file shown in this section beforehand.
The latest ESI file can be downloaded from the IAI website.
IAI Corporation http://www.intelligentactuator.com/field-network-configuration-files/
Contact IAI if the file is not available.
Page 10

5.Applicable Devices and Device Configuration
7
Precautions for Correct Use
Precautions for Correct Use
Additional Inf or mation
Additional Inf or mation
Additional Inf or mation
The connection line of EtherCAT communications cannot be shared with other Ethernet
networks.
Do not use devices for Ethernet such as a switching hub.
Use the Ethernet cable (double shielding with aluminum tape and braiding) of Category 5 or
higher, and use the shielded connector of Category 5 or higher.
Connect the cable shield to the connector hood at both ends of the cable.
Update the Sysmac Studio to the version specified in this section or higher version using the
auto update function.
If a version not specified in this section is used, the procedures described in Section 7. and
subsequent sections may not be applicable. In that case, referring to the Sysmac Studio
Version 1 Oper ation Manual (Cat. No. W504), use the equivalent procedures described in
this document.
For specifications of the Ethernet cables and network wirings, refer to Section 4. EtherCAT
Network Wir in g of the NJ-series CPU Unit Built-in EtherCAT(R) Port User's Manual (Cat. No.
W505).
The system configuration in this document uses USB for the connection to the Controller.
For how to install a USB driver, refer to A-1. Driver Installation for Direct U SB Cable
Connection of the Sysmac Studio Version 1 Operation Manual (Cat. No. W504).
The system configuration in this document uses USB for the connection to the SCON-CA
Controller. For how to install a USB driver, refer to Section 1.3.3. How to I nst all the USB
Conversion Adapter Driver Software of the PC Software RCM-101-MW, RCM-101-USB
Operation Manual (ME0155).
Page 11
6.EtherCAT S ettings
8
Name
Setting item
Set value
Remarks
SCON-CA
switch 1
fieldbus specification
6. EtherCAT S ettings
This section describes the specifications such as parameters and device variables that are set
in this document.
Hereinafter, the SCON-CA Controller is referred to as the "Destination Device" or the "Slave
Unit" in some descriptions.
6.1. Parameter Settings
The parameters required for connecting the Controller and the SCON-CA Controller via
EtherCAT are given below.
Controller
Axis number 0 -
Operation mode changeover
Fieldbus operation mode 2 Half direct value mode
Fieldbus node address 1 -
Fieldbus communication speed 0 -
Network type 6 -
Fieldbus input/output format 3 Default setting
OFF Positioner mode including
Page 12
6.EtherCAT S ettings
9
Device variable name
Data type
Description
E001_Out_Target_Position_2003_01
DINT
Target Position
E001_Out_Positioning_Band_2003_02
UDINT
Positioning Band
E001_Out_Velocity_2003_03
UINT
Velocity
E001_Out_Acceleration_Deceleration_2003_04
UINT
Acceleration / Deceleration
E001_Out_Pressing_Current_Limit_2003_05
UINT
Pressing Current Limit Value
E001_Out_Control_signal_2003_06
WORD
Control Signal
E001_Out_Bit00_DSTR
BOOL
Positioning Command
E001_Out_Bit01_HOME
BOOL
Home return
E001_Out_Bit02_STP
BOOL
Pause
E001_Out_Bit03_RES
BOOL
Reset
E001_Out_Bit04_SON
BOOL
Servo ON Command
E001_Out_Bit05_JISL
BOOL
Jog/inch switching
Jog-speed/inch-distance
switching
E001_Out_Bit07_JOG_0
BOOL
- Jog
E001_Out_Bit08_JOG_0
BOOL
+ Jog
E001_Out_Bit09_Reserved_0
BOOL
Unavailable
Servo gain parameter set
selection 0
Servo gain parameter set
selection 1
E001_Out_Bit12_PUSH
BOOL
Push-motion specification
E001_Out_Bit13_DIR
BOOL
Push direction specification
E001_Out_Bit14_RMOD
BOOL
Operating mode selector
E001_Out_Bit15_BKRL
BOOL
Forced brake release
6.2. Device Variables
The PDO communications data for the Destination Device are allocated to the Controller's
device variables.
The device variables and the data types are shown below.
■Output area (from Controller to Destination Device)
E001_Out_Bit06_JVEL BOOL
E001_Out_Bit10_GSL0 BOOL
E001_Out_Bit11_GSL1 BOOL
Page 13

10
Device variable name
Data type
Description
E001_In_Current_Position_2004_01
DINT
Current Position
E001_In_Command_Current_2004_02
UDINT
Command Current
E001_In_Current_Speed_2004_03
DINT
Current Speed
E001_In_Alarm_Code_2004_04
UINT
Alarm Code
E001_In_Status_Signal_2004_05
WORD
Status Signal
Positioning completion
signal
E001_In_Bit01_HEND
BOOL
Home return completion
E001_In_Bit02_MOVE
BOOL
Moving Signal
E001_In_Bit03_ALM
BOOL
Alarm
end
E001_In_Bit05_PSFL
BOOL
Pressing and a Miss
E001_In_Bit06_Reserved_0
BOOL
Unavailable
Absolute battery voltage low
warning
E001_In_Bit08_RMDS
BOOL
Operation Mode Status
E001_In_Bit09_Reserved_0
BOOL
Unavailable
E001_In_Bit10_Reserved_0
BOOL
Unavailable
E001_In_Bit11_Reserved_0
BOOL
Unavailable
E001_In_Bit12_ZONE1
BOOL
Zone 1
E001_In_Bit13_ZONE2
BOOL
Zone 2
E001_In_Bit14_PWR
BOOL
Controller ready
E001_In_Bit15_EMGS
BOOL
Emergency stop
Additional Inf or mation
Additional Inf or mation
■Input area (from Destination Device to Controller)
6.EtherCAT S ettings
E001_In_Bit00_PEND
E001_In_Bit04_SV
E001_In_Bit07_BALM_ALML
For details on the allocations of input and output areas, refer to Section 4.6. Communicating
with the Master Station of the EtherCAT Operation Manual (ME0273).
BOOL
BOOL
BOOL
Operation preparation
The device variables are named automatically from a combination of the device names and
the port names.
The default device names are “E" followed by a serial number that starts from 001.
Page 14

7.EtherCAT Conne ction Procedure
11
7.2. Setting up the IAI SCON-CA
Controller
Set up the IAI SCON-CA Controller.
7.2.1. Hardware Settings
Set the hardware switches on the SCON-CA
Controller and connect the cables.
7.2.2. Parameter Settings
7.3. Setting up the Controller
Set up the Controller.
7.3.1. Starting the Sysmac Studio and
Installing the ESI File
Install the ESI file for the SCON-CA Controller in the
Sysmac Studio.
7.3.2. Setting up the EtherCAT
Network Configuration
Set up the EtherCAT network configuration.
7.3.3. Setting the Device Variables
Set the device variables used for the EtherCAT
Slave Unit.
7.3.4. Transferring the Project Data
Transfer the project data from the Sysmac Studio to
the Controller.
7.4. Checking the EtherCAT
Communications
Confirm that the PDO communications of EtherCAT
are performed normally.
7.4.1. Checking the Connection Status
Check the connection status of the EtherCAT
network.
7.4.2. Checking the Sent and
Received Data
Confirm that the correct data are sent and received.
7. EtherCAT Connection Procedure
This section describes the procedure for connecting the Controller to the SCON-CA Controller
via EtherCAT.
This document explains the procedures for setting up the Controller and the SCON-CA
Controller based on the factory default setting. For the initialization, refer to Section 8
Initialization Method.
7.1. Work Flow
Take the following steps to perform PDO Communications of EtherCAT.
↓
↓
↓
↓
↓
↓
↓
↓
↓
Set the parameters for the SCON-CA Controller.
↓
Page 15

7.EtherCAT Conne ction Procedure
12
following procedures.
2
3
Power Supply
Brake Release
Status LED
System I/O Connector
FG Connection
Regeneration Unit
Brake Power Supply
EtherCAT(R) Output Port
Axis Number Setting
Operation Mode
Absolute Battery
Operation Mode
7.2. Setting up the IAI SCON-CA Controller
Set up the IAI SCON-CA Controller.
7.2.1. Hardware Settings
Set the hardware switches on the SCON-CA Controller and connect the cables.
Precautions for Correct Use
Make sure that the power supply is OFF when you perform the setting up.
Make sure that the power supply
1
to the SCON-CA Controller is
OFF.
*If the power supply is turned
ON, settings may not be
applicable as described in the
Check the position of the
hardware switches and the
connectors of the SCON-CA
Controller by referring to the
right figure.
Status Indicator LEDs
Switch (ADRS)
Changeover Switch
Connecting Connector
Motor Connector
Connector
Terminal
(RUN/ERR)
EtherCAT(R) Input Port
Setting Switch
SIO Connector
Switch
Connector
Encoder Connector
Connector
Set the Axis Number Setting
Switch
(ADRS) to 0.
Page 16

13
Set the Operation Mode
6
7
1
L1
Motor AC power input
2
L2
Motor AC power input
3
L1c
Control AC power input
4
L2c
Control AC power input
5
NC
Unconnected
6
PE
Protective ground line
Motor cable
Encoder cable
4
Changeover Switch 1 to OFF.
(Operation Mode Changeover
Switch: Positioner mode
including fieldbus specification)
*Do not set the Operation Mode
Changeover Switch 2 to ON as
it is used by the manufacturer
for adjustment purposes.
Connect the Motor Connector
5
and the Actuator with the Motor
cable.
Connect the Encoder Connector
and the Actuator with the
Encoder cable.
7.EtherCAT Conne ction Procedure
(Operation Mode Changeover Switch)
Actuator
Connect the Ethernet cable to
the EtherCAT(R) Input Port.
Ethernet cable
Connect 100 VAC power supply
to the Motor AC power inputs
and the Control AC power inputs
of the Power Supply Connector.
For details on wiring, refer to the
SCON-CA/CAL/CGAL
Controller Instruction M anual
(ME0243).
Pin No Signal
name
Description
Page 17

7.EtherCAT Conne ction Procedure
14
Additional Inf or mation
RCM-101-USB Operation Manual (Cat. No. ME0155).
SCON-CA Controller.
4
Personal
Communication
USB conversion
7.2.2. Parameter Settings
Set the parameters for the SCON-CA Controller.
Parameters are set by PC Interface Software for RC. Install the software and USB Driver to
the Personal computer beforehand.
For information on how to install drivers, etc., refer to the PC Software RCM-101-MW,
Connect the SCON-CA
1
Controller to the Personal
computer with a USB cable,
USB conversion unit, and
Communication cable.
*Connect the USB cable to the
USB port on the Personal
computer. Connect the
Communication cable to the
SIO Connector on the
computer
USB cable
unit
cable
SIO connector
Set the Operation Mode Setting
2
Switch on the front of the
SCON-CA Controller to the
MANU side.
Turn ON the power supply to the
3
SCON-CA Controller.
Start the PC Interface Software
for RC from the Personal
computer.
Page 18

15
The Setting of application Dialog
5
Box is displayed only at the
initial start after the software has
been installed.
Select the communications port
No. to be used in the Port Field,
and click the OK Button.
*If there are multiple serial ports
on the Personal computer,
display the Windows Device
Manager. Then select the
same port as the
communications port No.
where the SCON-CA Controller
is connected under Ports
(COM & LPT) (COM6 in this
example).
*To display the Device
Manager, right-click My
Computer and click Properties
from the Windows Menu. Then
click Device Manager in the
window that is displayed.
7.EtherCAT Conne ction Procedure
When the software starts,
6
the Check for connected axes
Dialog Box is displayed, and
then the SCON-CA Controller
goes online.
The connected axes check
performs to the final axis (the
figure on the right indicates Axis
No.: 15) when you go online.
Page 19

16
If the Alarm Dialog Box is
8
9
10
OK
7
displayed, check the cable
connections and the
communications port No..
Check the contents and click the
OK Button, then perform steps 8
to 9.
If the Alarm Dialog Box is not
displayed, steps 8 to 9 are
unnecessary.
Proceed to step 10.
Check the cable connections
and the communications port
No..
*Select Application from the
Setting Menu for the
communications port No..
The Setting of application
Dialog Box in step 5 is
displayed. Check the
communications port No. to
use.
7.EtherCAT Conne ction Procedure
Select Check for connected
axes – Controller from the
Setting Menu.
The Manual operation mode
Select Dialog Box is displayed.
Select Teach 1 (Safety speed
effective/PIO start prohibition)
as the manual operation mode,
and click the
Button.
Page 20

17
13
is displayed in red).
14
The main screen is displayed.
11
Select Edit from the Parameter
12
Menu.
The parameter edit window is
displayed as shown on the right.
Scroll through the parameter
options to check and change the
following parameters.
・Fieldbus operation mode
(No.84): 2 (Default: 0)
・Fieldbus node address
(No.85): 1 (Default: 0)
・Fieldbus communication speed
(No.86): 0 (Default)
・Network type (No.87):
6 (Default)
・Fieldbus input/output format
(No.90): 3 (Default)
*Any change made to the value
appears in red. (e.g. If the
value is changed from 0 to 2, 2
7.EtherCAT Conne ction Procedure
Select Load to CTL from the
Parameter Menu.
Page 21

18
A Confirmation Dialog Box is
Go to step 17.
17
SCON-CA Controller turns ON.
15
displayed as shown on the right.
Check the contents and click the
Yes Button.
*The Confirmation Dialog Box
does not appear if no change is
made in step 13.
A Confirmation Dialog Box is
16
displayed as shown on the right.
Check the contents and click the
Yes Button.
The right dialog box is displayed
stating "Restarting Controller".
7.EtherCAT Conne ction Procedure
After the SCON-CA Controller
restarts, set the Operation Mode
Setting Switch on the front of the
SCON-CA Controller to the
AUTO side.
*The Operation Mode Setting
Switch can be changed even
when the power supply to the
Turn OFF the power supply to
18
the SCON-CA Controller.
Page 22

7.EtherCAT Conne ction Procedure
19
1
2
3
execute a selection to start.
4
5
End Cover
Power Supply Unit
Ethernet
cable
CPU Unit
Controller
Personal
Destination
Device
7.3. Setting up the Controller
Set up the Controller.
7.3.1. Starting the Sysmac Studio and Installing the ESI File
Install the ESI file for SCON-CA Controller in the Sysmac Studio.
Install the Sysmac Studio and USB driver in the Personal computer beforehand.
Connect the Ethernet cable to the
built-in EtherCAT port (PORT2) of
the Controller, and connect the
USB cable to the peripheral
(USB) port. As shown in 5.2.
Device Configuration, connect the
Personal computer, the
Destination Device, and the
Controller.
Turn ON the power supply to the
Controller and the SCON-CA
Controller.
Start the Sysmac Studio.
*If a confirmation dialog for an
access right is displayed at start,
computer
USB cable
The Sysmac Studio starts. Click
the Connect to Controller
Button.
The Connect to Controller Dialog
Box is displayed.
Select the Direct connect i on via
USB Option of Connection type.
Uncheck both the Upload the
project Check Box and the
Display the T r oubl esh ooting
Dialog Box Check Box of
Operation after Connection.
Click the Connect Button.
Page 23

7.EtherCAT Conne ction Procedure
20
proceed with the processing.
7
Additional Inf or mation
Controller of the Sysmac Studio Vers i on 1 O peration Manual (Cat. No. W504).
Toolbox
Check the contents and click the
6
OK Button if a confirmation dialog
box on the right is displayed.
*The displayed dialog depends
on the status of the Controller
used. Check the contents and
click the OK or Yes Button to
A dialog box on the right is
displayed. Check the contents
and click the OK Button.
The Auto Connect Project Dialog
8
Box is displayed online.
When an online connection is
established, a yellow bar is
displayed on the top of the Edit
Pane.
The following panes are
displayed in this window.
Left: Multiview Explorer
Top right: Toolbox
Bottom right: Controller Status Pane
Middle top: Edit Pane
The following tab pages are
displayed at the middle bottom of
the window.
Output Tab Page
Build Tab Page
Multiview
Explorer
Output Tab
Page
Edit Pane
Build Tab
Page
Controller
Status Pane
For details on online connections to a Controller, refer to Section 6. Online Connections to a
Page 24

21
Double-click EtherCAT under
10
11
9
Configurations and Setup in
the Multiview Explorer.
The EtherCAT Tab Page is
displayed in the Edit Pane.
Right-click Master and select
Display ESI Library.
7.EtherCAT Conne ction Procedure
The ESI Library Dialog Box is
12
displayed. Click the this folder
link.
When the Explorer starts, click
the Close Button to close the
dialog box.
The Explorer starts and a folder
13
is opened, allowing you to install
the ESI file. Copy the prepared
ESI_IAI_CON_ECT_V_1_07_R
ev_0.xml to this folder.
Page 25

22
Select Exit from the File Menu
15
Close
Precautions for Correct Use
14
to exit the Sysmac Studio.
*After installing the ESI file, the
Sysmac Studio needs to be
restarted.
A dialog box asking to save the
project is displayed. If no need
to save it, click the No Button.
7.EtherCAT Conne ction Procedure
In the same way as steps 3 to
11, restart the Sysmac Studio
and display the ESI Library
Dialog Box.
Click the + Button of
ESI_IAI_CON_ECT_V_1_07_R
ev_0 to confirm that
RC-ECT-FMOD2(16Byte/16Byte
) Rev.0x00010007 is displayed.
Confirm that an exclamation
mark (warning) is not displayed.
Click the
If an exclamation mark (warning) is displayed for the ESI file, check the name of the ESI file
and obtain the ESI file with a correct name. If an exclamation mark (warning) is displayed
even when the name of the ESI file is correct, the file may be corrupted. Contact the device
manufacturer.
Button.
Page 26

7.EtherCAT Conne ction Procedure
23
1
*If the EtherCAT Tab Page is not
configuration
7.3.2. Setting up the EtherCAT Network Configuration
Set up the EtherCAT network configuration.
Right-click Master on the
EtherCAT Tab Page, and select
Compare and Merge wit h
Actual Network Configuration.
displayed on the Edit Pane,
take step 9 in 7.3.1. Starti ng
the Sysmac Studio and
Installing the ESI File to
display.
A screen is displayed stating
"Get information is being
executed.".
The Compare and Merge with
2
Actual Network Configuration
Dialog Box is displayed.
Node address 1 and
RC-ECT-FMOD2(16Byte/16Byt
e) Rev:0x00010007 are added
to the Actual network
configuration after the
comparison.
Click the Apply actual network
A confirmation dialog box is
3
displayed. Check the contents
and click the Apply Button.
The dialog box on the right is
displayed. Click the Close
Button.
Button.
Page 27

24
As a node address 1 slave,
4
E001
RC-ECT-FMOD2(16Byte/16Byt
e) Rev.0x00010007 is added to
the Network configuration on the
Sysmac Studio.
Confirm that the data above are
added, and click the Close
Button.
Node address 1 and E001
5
RC-ECT-FMOD2(16Byte/16Byt
e) Rev.0x00010007 slave are
added to the EtherCAT Tab
Page on the Edit Pane.
7.EtherCAT Conne ction Procedure
Page 28

25
7.3.3. Setting the Device Variables
1
2
4
name.
Set the device variables used for the EtherCAT Slave Unit.
Select Offline from the
Controller Menu.
The yellow bar on the top
disappears.
Select RC-ECT-FMOD added in
the previous section on the
EtherCAT Tab Page.
Check that the device name is
E001.
*The device name can be
arbitrarily changed.
7.EtherCAT Conne ction Procedure
Double-click I/O Map under
3
Configurations and Setup in
the Multiview Explorer.
The I/O Map Tab Page is
displayed on the Edit Pane.
Confirm that Node1 is displayed
in the Position Column and the
Slave Unit added in the Port
Column is displayed.
*To manually set a variable
name for the Slave Unit,
click a column under the
Variable Column and enter a
Page 29

26
Right-click Node1 and select
6
Additional Information
Additional Inf or mation
5
Create Device Varia ble.
The variable names and
variable types are set.
7.EtherCAT Conne ction Procedure
The device variables are named automatically from a combination of the device names and
the port names.
The default device names are “E" followed by a serial number that starts from 001.
In this document, device variables are automatically named for a unit (a slave).
Device variables can also be manually named for ports.
Page 30

7.EtherCAT Conne ction Procedure
27
behave according to the slave settings. The time that communications are cut off
Before you transfer the user program, confirm that it will not adversely affect the
subsequent steps. Always confirm safety before performing the synchronization.
1
The Build Tab Page is displayed.
3
7.3.4. Transferring the Project Data
Transfer the project data from the Sysmac Studio to the Controller.
Always confirm safety at the Destination Device before you transfer a user
program, configuration data, setup data, device variables, or values in memory
used for CJ-series Units from the Sysmac Studio.
The devices or machines may perform unexpected operation regardless of the
operating mode of the CPU Unit.
After you transfer the user program, the CPU Unit restarts and communications
with the EtherCAT slaves are cut off. During that period, the slave outputs
depends on the EtherCAT network configuration.
device.
A slave will be reset after performing the synchronization in step 7 and
Select Check All Programs
from the Project Menu.
2
Check that "0 Errors" and "0
Warnings" are displayed in the
Build Tab Page.
Select Rebuild Controller from
the Project Menu.
Page 31

28
A confirmation dialog box on the
5
6
top of the Edit Pane.
7
compared.
4
right is displayed. Confirm that
there is no problem and click the
Yes Button.
Check that "0 Errors" and "0
Warnings" are displayed in the
Build Tab Page.
Select Online from the
Controller Menu.
A yellow bar is displayed on the
7.EtherCAT Conne ction Procedure
Select Synchronization from
the Controller Menu.
The Synchronization Dialog Box
8
is displayed.
Confirm that the data to transfer
(NJ501 in the right dialog box) is
selected. Then, click the
Transfer To Controller Button.
*After executing the Transfer To
Controller, the Sysmac Studio
data is transferred to the
Controller and the data is
Page 32

29
A confirmation dialog box on the
*Do not return to RUN mode.
10
from step 1.
9
right is displayed. Confirm that
there is no problem and click the
Yes Button.
A screen stating "Synchronizing"
is displayed.
A confirmation dialog box on the
right is displayed. Confirm that
there is no problem and click the
No Button.
Confirm that the synchronized
data is displayed with the color
specified by "Synchronized"
and a message is displayed
stating "The synchronization
process successfully finished.".
If there is no problem, click the
Close Button.
*A message stating "The
synchronization process
successfully finished" is
displayed if the Sysmac Studio
project data coincides with the
Controller data.
*If the synchronization fails,
check the wiring and repeat
7.EtherCAT Conne ction Procedure
Page 33

7.EtherCAT Conne ction Procedure
30
1
2
Status LED (RUN/ERR)
7.4. Checking the EtherCAT Communications
Confirm that the PDO communications of EtherCAT are performed normally.
7.4.1. Checking the Connection Status
Check the connection status of the EtherCAT network.
Confirm that PDO communications
via EtherCAT are performed
normally by checking the LED
indicators on the Controller.
The LED indicators in normal status
are as follows:
NET RUN: Green lit
NET ERR: Not lit
LINK/ACT: Yellow flashing
Check the LED indicators on the
SCON-CA Controller.
The LED indicators in normal status
are as follows:
RUN: Green lit
ERR: Not lit
Link/Activity (Input):
Green flickering
EtherCAT(R) Output Port
Link/Activity LED (Output)
EtherCAT(R) Input Port
Link/Activity LED (Input)
Page 34

7.EtherCAT Conne ction Procedure
31
Sufficiently confirm safety before you change the values of variables on a Watch
1
2
4
7.4.2. Checking the Sent and Received Data
Confirm that the correct data are sent and received.
Tab Page when the Sysmac Studio is online with the CPU Unit. The connected
devices may operate regardless of the operating mode of the Controller.
In the procedure of this section, the SCON-CA Controller will run. Confirm safety
before operation. If you cannot confirm safety, do not proceed to this section
after completing until Section 7.4.1.
If you proceed to this section, make sure to complete all the steps and place the
Destination Device in the safe state.
Select Watch Tab Page from the
View Menu.
Select the Watch1 Tab.
As shown below, enter the following
3
name of the variables for
monitoring. Click the Input Name…
in the Name Column to enter a new
name.
E001_Out_Bit04_SON
E001_In_Status_Signal_2004_05
Select Binary from the pull-down
list of Display format of
E001_In_Status_Signal_2004_05.
The Display format is selected to
Binary, and the Online value is
displayed in binary.
Page 35

32
Select Status from the Monitor
7
5
Menu of the PC Interface Software
for RC.
*If the PC Interface Software for RC
has not been started, refer to
7.2.2. Parameter Settings to start
the software and connect the
SCON-CA Controller again.
The Status Dialog Box is displayed.
6
7.EtherCAT Conne ction Procedure
Confirm that the SON Field of Input
is OFF, and the Servo and RUN
Fields of Internal flags are not lit.
Page 36

33
True.
9
10
11
Click TRUE in the Modify Column of
8
E001_Out_Bit04_SON.
The Online value of
E001_Out_Bit04_SON changes to
Confirm that the SON Field of Input
changed to ON, and the Servo and
Run Fields of Internal flags are lit on
the PC Interface Software for RC.
Check the Status Column of Output.
Confirm that the following data of
Output is ON.
PEND
(0th bit of
E001_In_Status_Signal_2004_05)
SV
(4th bit of
E001_In_Status_Signal_2004_05)
PWR
(14th bit of
E001_In_Status_Signal_2004_05)
7.EtherCAT Conne ction Procedure
Confirm that the Online value of
E001_In_Status_Signal_2004_05
displays the same value as
confirmed in the step 9.
Click FALSE in the Modify Column
of E001_Out_Bit04_SON.
The Online value of
E001_Out_Bit04_SON changes to
False.
Page 37

34
Confirm that the SON Field of Input
13
12
is OFF, and the Servo and RUN
Fields of Internal flags are not lit.
Check the Status Column of Output.
Confirm that the following data of
Output is OFF.
PEND
(0th bit of
E001_In_Status_Signal_2004_05)
SV
(4th bit of
E001_In_Status_Signal_2004_05)
Confirm that the following data of
Output is ON.
PWR
(14th bit of
E001_In_Status_Signal_2004_05)
Confirm that the Online value of
E001_In_Status_Signal_2004_05
displays the same value as
confirmed in the step 12.
7.EtherCAT Conne ction Procedure
Page 38

8.Initialization Method
35
8. Initialization Method
This document provides the explanation of the setting procedure based on the factory default
setting.
Some settings may not be applicable as described in this document unless you use the
devices with the factory default setting.
8.1. Initializing the Controller
To initialize the settings of the Controller, select Clear All Memory from the Controller Menu of
the Sysmac Studio. The Clear All Memory Dialog Box is displayed. Check the contents and
click the OK Button.
8.2. Initializing the IAI SCON-CA Controller
For information on how to initialize the IAI SCON-CA Controller, refer to Appendix 14.1.
Parameter (Factory Default Setting) Initializing Method of the PC Software RCM-101-MW,
RCM-101-USB Operation Manual (Cat. No. ME0155).
Page 39

36
9. Revision History
code
Revision
01 December 19, 2013 First edition
02 January 26, 2015 Applicable model SCON-CAL added.
Date of revision Revision reaso n and revision page
Revisions due to up-grade of the SCON-CA Controller (ESI
file changed from V1.04 to V1.07).
Revisions due to up-grade of the Controller and version-up of
the Sysmac Studio.
9.Revision History
Page 40

2015
P585-E1-02
0115-(1213)
 Loading...
Loading...