

Omron R88A-MCW151 DATASHEET [tr]
OMRON
1.5 eksen ileri seviyeli hareket kontrol ünitesi
• W-serisi servo sürücüye doğrudan bağlanır
• Çalışma kolaylığı için dahili lokal I/O
• Kayıt, Kam ve senkronizasyon fonksiyonelliği
• BASIC dili kullanarak geliştirmesi kolaydır
• Çoklu-görev özelliği
• Güçlü ve kullanıcı dostu Windows tabanlı programlama aracı
• Doğrudan terminal arabirimine bağlanır
• Omron’un HostLink protokolünü veya DeviceNet bus’u destekler
R88A-MCW151-(DRT)-E
Sipariş Bilgisi-----------------------------------------------------------------------
Ürün kodu Tanım
R88A-MCW151-E 1.5 eksen hareket kontrol ünitesi RS422/485
R88A-MCW151-DRT-E DeviceNet ile 1.5 eksen hareket kontrol ünitesi
R88A-CCM002P4 Programlama kablosu, 2m
MOTION PERFECT V2 Programlama İzleme ve Hata Giderme Yazılımı.
(Motion Tools CD’sinin içindedir)
I203-E2-01 R88A-MCW151 Kullanıcı Kılavuzu
Özellikler ----------------------------------------------------------------------------Genel Özellikler
Madde Tanım
Uygulanabilir Servo Sürücü W-Serisi (Yazılım Sür. 14 veya üstü)
Uygulanabilir Servo motor W-Serisi, Artım tipli/Mutlak encoder
Montaj Metodu Servo sürücü tarafındaki DPRAM konnektöre bağlanır
Gerilim Besleme Metodu 24 VDC (Dış güç kaynağı)
5 VDC (W-Serisi servo sürücü tarafından beslenir)
Toplam Güç Tüketimi 4.0 W
Boyutlar 142x128x20mm (HxDxW)
Ağırlık 200 g
Akım Tüketimi 24 VDC için 170 mA
Çıkışş Güç kaynağı 5 VDC, maks.160 mA (harici encoder)
Çevresel Özellikler
Madde Tanım
Ortam Aşındırıcı veya patlayıcı gazların bulunmadığı
İyi havalandırılmış
Toz ve nem olmayan
Çevre Çalışma Isısı
Çevre Depolama Isısı
Çevre Çalışma/Depolama Nem
Oranı
Vibrasyon dayanıklılığı 0.5G (4.9 m/s2)
Şok dayanıklılığı 2G (19.6 m/s2)
0 … +55 °C
-20 …+75 °C
<%90 RH veya daha az (yoğunlaşmayan)
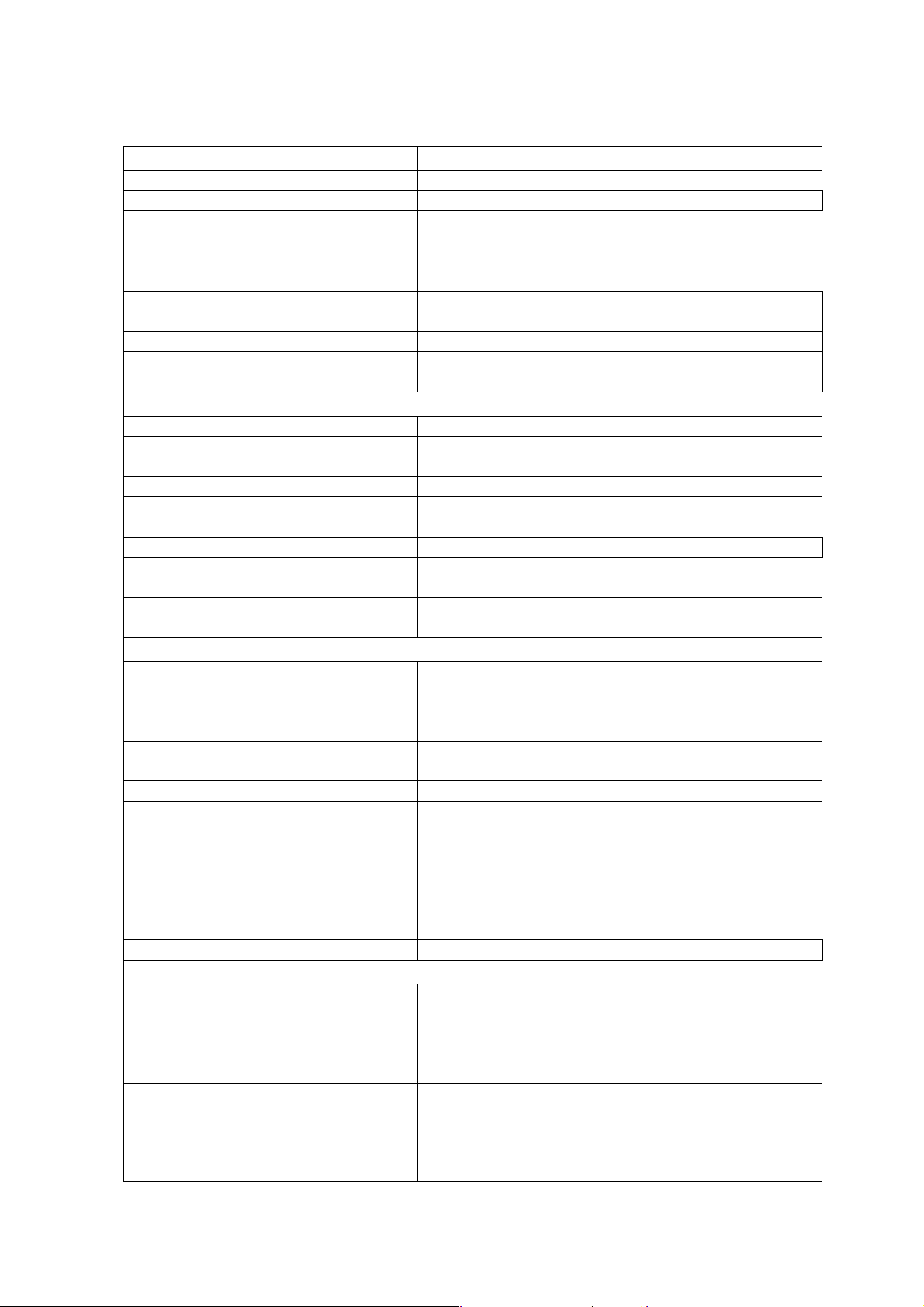
Fonksiyonel özellikler
Madde Tanım
Toplam Eksen Miktarı 3
Kontrollü Servo Sürücü Ekseni 1
Maks. Encoder Giriş veya Çıkış
Eksen Sayısı
Maks. Sanal Eksen Sayısı 2
Servo Loop Döngüsü Seçilebilir 0.5 ms veya 1.0 ms.
Kayıt Girişleri Encoder giriş ekseni için 2x MCW151 Unite
Ölçüm Birimleri Kullanıcı tanımlı
Kendi Kendine Teşhis Fonksiyonu Kontrol toplamı ile hafıza karışıklığının belirlenmesi
Programlama
Programlama Dili BASIC
Görev Sayısı Aynı anda çalışan 3 göreve ilaveten Komut Satırı
Maks. Program Sayısı 14
Kullanıcı programları için Kullanılabilir
Hafıza
Veri Saklama Kapasitesi 251 (VR) + 8000 (Tablo)
Program Verisi Kaydetme, Hareket
Kontrolör
Program Verisi Kaydetme, Kişisel
Bilgisayar
Hareket Kontrolü
Hız Kontrolü PID ile kapalı loop, çıkış hızı ve ileri hız besleme
Tork Kontrolü Tork referansı (açık loop)
Kontrol Switch’i Çalışma esnasında Hız / Tork kontrol anahtarlaması
Konumlandırma Çalışmaları Lineer İnterpolasyon
Hızlanma/Yavaşlama Eğğrileri Trapezoid veya S-eğğrisi
Servo Sürücü Erişimi
Hareket Kontrolü Hız Kontrolü
İzleme Sürücü Alarm ve Uyarı Durumu
1
Servo Ekseni için 1x W-sürücü
Hata sayacı aşırı yükünün belirlenmesi
görevi
128KB
Rastgele Erişim Bellek (RAM) ve Flash hafıza
yedekleme.
Motion Perfect yazılımı kişisel bilgisayarın sabit
diskinde yedeklemeyi yönetir.
kazançları
Hız referansı (açık loop)
Olası tork limit çalışması
Olası hız limit çalışması
Dairesel interpolasyon
CAM profil hareketi
Elektronik dişli kutusu bağğlantısı
Bağğlantılı CAM profil hareketi
Her hangi iki eksen için bağğlantılı hareket
Eksen ekleme
Tork Kontrolü
Posizyon geri besleme
Sürücü Etkin
Sürücü Baskı Kaydı
Genel Sürücü Durumu
Sürücü Dijital Giriş
Sürücü Analog Giriş
Sürücü Limit Switch’leri
Genel Kontrol Sürücü Alarm Sıfırlama
Sürücü Sıfırlama
Parametre Erişimi Pn parametreleri Okuma ve Yazma
Un parametreleri okuma
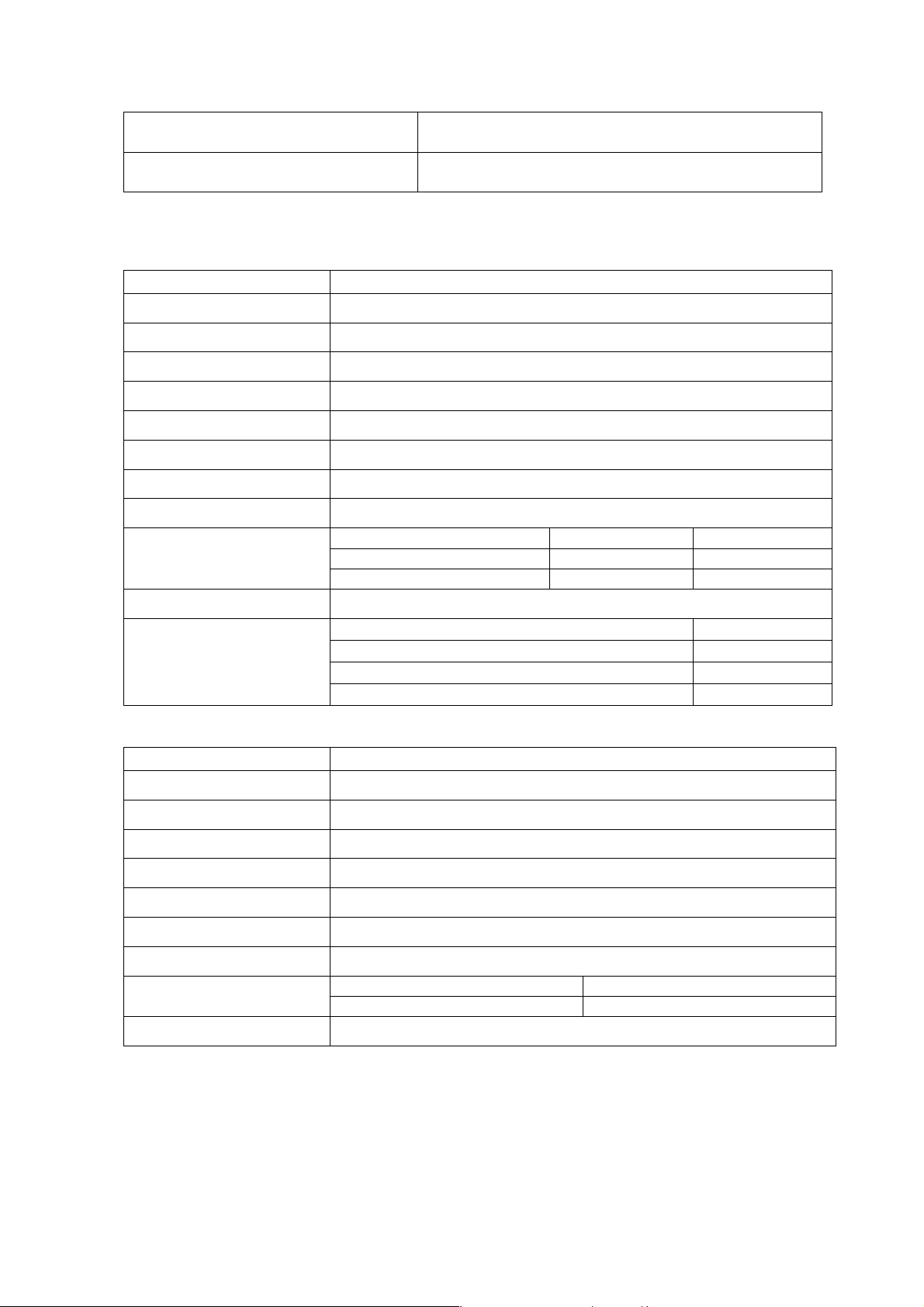
I/O Özellikleri
Dijital Girişler
Madde Tanım
Girişlerin Sayısı 8
Maks. Giriş Gerilimi 24 VDC +%10
Galvanik İzolasyon I/O ve sistemin diğer parçaları arasında ve giriş ile çıkışlar arasında
Tip NPN veya PNP
Giriş Empedansı
Giriş Akımı: 7 mA 24VDC
Açık Gerilim 11 V min.
Kapalı Gerilim 1 V maks.
Giriş Tepki Süreleri
Kayıt Girişlerinin Sayısı 2
Kayıt Girişi Tepki Süresi
3.3 KΩ
Servo Periyodu 0.5 ms 1.0 ms
Yüksek Öncelikli Görev 1.8 ms (maks.) 2.3 ms (maks.)
Yüksek Öncelikli Görev 2.8 ms (maks.) 3.3 ms (maks.)
Dijital giriş I0/R0 ve I1/R1 (Açık taraf)
Dijital giriş I0/R0 ve I1/R1 (Kapalı taraf)
Z-işaretleyici (Açık taraf)
Z-işaretleyici (Kapalı taraf)
50 µsn
150 µsn
2 µsn
2 µsn
Dijital Çıkışlar
Madde Tanım
Çıkış Sayısı 6
Maks. Gerilim 24 VDC +%10
Galvanik İzolasyon I/O ve sistemin diğer parçaları arasında ve giriş ile çıkışlar arasında
Çıkış Tipi PNP
Akım kapasitesi Her çıkış 100 mA (6’lı grup için toplam 600 mA)
Açık Gerilim 11 V min.
Kapalı Gerilim 1 V maks.
Servo Periyodu 0.5 ms 0.8 ms (maks.)Çıkış Cevap Süreleri
Servo Periyodu 1 ms 1.3 ms (maks.)
Koruma Aşırı akım, aşırı sıcaklık ve ortak 2A sigorta
Encoder Giriş
Madde Tanım
Encoder Girişlerin Sayısı 1
Encoder Sinyalleri: A(+), A(-), B(+), B(-), Z(+), Z(-)
Sinyal Seviyesi EIA RS-422A Standartları (Hat-sürücü)
Giriş Empedansı
Cevap Verme Frekansı 1500 kps (6000 kcps)
Sonlandırma
Galvanik İzolasyon Hayır
48 KΩ min
Evet, dahili 220 Ω switch ile seçilebilir
Encoder Çıkış
Madde Tanım
Encoder Girişlerin Sayısı 1
Encoder Sinyalleri: A(+), A(-), B(+), B(-), Z(+), Z(-)
Sinyal Seviyesi EIA RS-422A Standartları (Hat-sürücü)
Maksimum Frekans 1500 kps (2000 kcps)
Galvanik İzolasyon Hayır
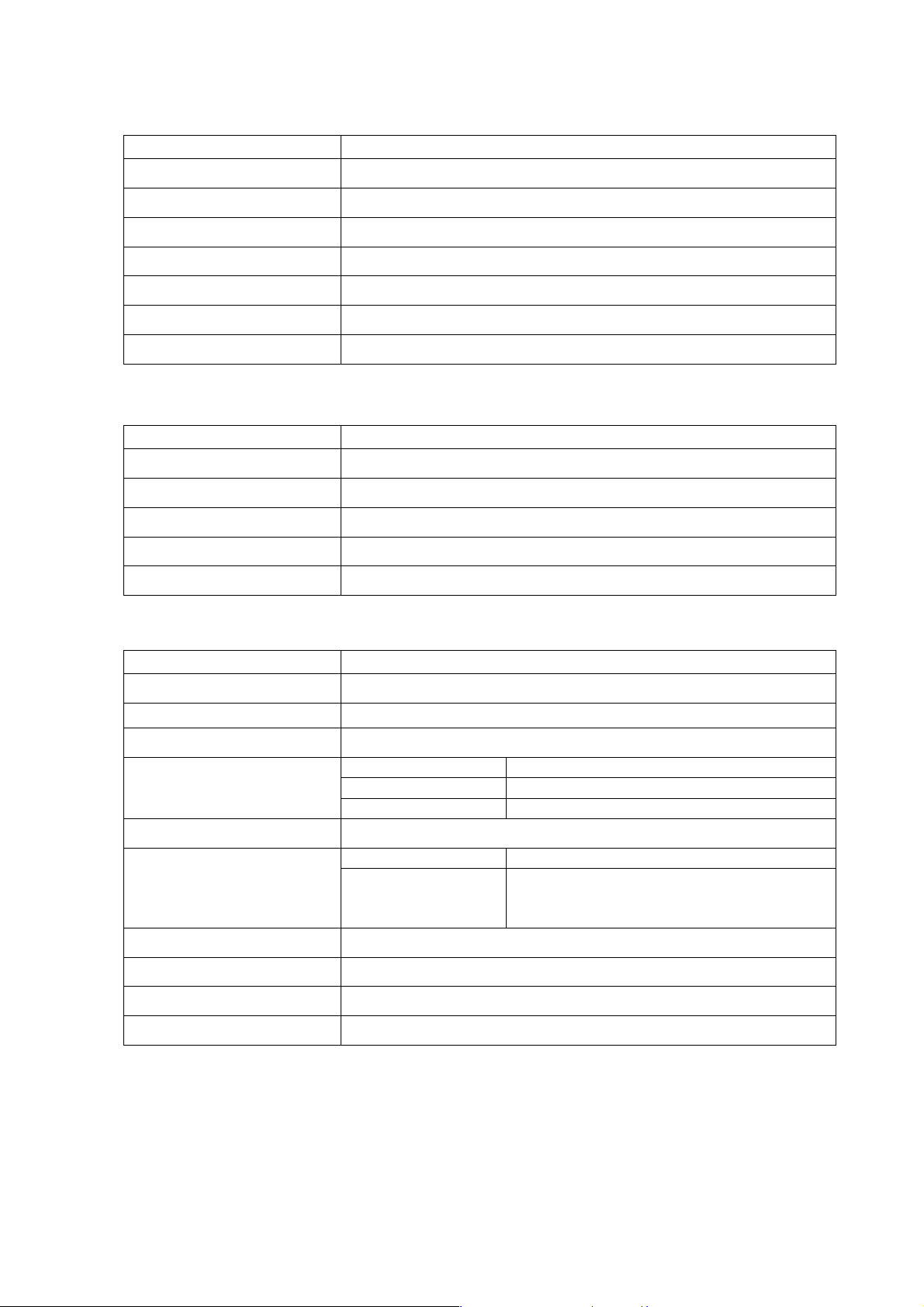
RS-232C Arabirim Özellikleri
Madde Tanım
Elektriksel Karakteristikler EIA RS-232C’ye uygun
Senkronizasyon Çalışma-durma senkronizasyonu (asynchronous)
Haberleşme Hızı 1200 / 2400 / 4800 / 9600 / 19200 / 38400 bps
İletişim Biçimi
İletişim Modu Noktadan noktaya (1:1)
Galvanik İzolasyon Hayır
Konnektör Tipi 8-pin miniDIN
Haberleşme Buffer’ları 254 byte (port1)
Kablo Uzunluğu 15 m maks.
Veri bit Uzunluğu 7 veya 8 bit
Stop Bit 1 veya 2 bit
Parite Bit Çift/Tek/Yok
Port 0 Motion Perfect Yazılım Protokolüİletişim Protokolü
Port 1 Host Link Master Protokol,
Host Link Slave Protokol,
ASCII Genel amaç
 Loading...
Loading...