

Omron R7D-ZP, R7M-Z ok

USER´S MANUAL
SMARTSTEP Junior
Servomotors/Servo Drivers
MODELS R7M-Z
@@
(Servomotors)
R7D-ZP
@@
(Servo Drivers)
Cat. No. I553-E1-01

Thank you for choosing this SMARTSTEP Junior product.
This manual provides information on installation, wiring, and switch setting for the SMARTSTEP Junior
Servomotors and Servo Drivers. For information about troubleshooting, refer to the S MARTSTEP Junior
User’s Manual (Cat. No. I553).
Intended Audiences
This manual is intended for the following personnel, who must also have knowledge of
electrical systems (an electrical engineer or the equivalent).
• Personnel in charge of installing FA systems
• Personnel in charge of designing FA systems
• Personnel in charge of managing FA systems and facilities
NOTICE
This manual contains information necessary for the operation of the SMARTSTEP Junior
Servomotors and Servo Drivers. Please read this manual thoroughly and understand its
contents before attempting to operate the product. Please keep this manual handy for
future reference after reading it.
Be sure that this manual accompanies the product to its final user.
OMRON, 2006
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form, or
by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission of
OMRON.
No patent liability is assumed with respect to th e use of the information contained herein. Moreover, because OMRON is
constantly striving to improve its high-quality products, the information contained in this manual is subject to change without
notice. Every precaution has been taken in the preparati on of this manual. Nevertheless, OM RON assumes no responsibility
for errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained in
this publication.

2
Read and Understand this Manual
Please read and understand this manual before using the product. Please consult your OMRON
representative if you have any questions or comments.
Warranty and Limitations of Liability
WARRANTY
OMRON's exclusive warranty is that the products are free from defects in materials and workmanship for a
period of one year (or other period if specified) from date of sale by OMRON.
OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED, REGARDING
NON-INFRINGEMENT, MERCHANTABILITY, OR FITNESS FOR PARTICULAR PURPOSE OF THE
PRODUCTS. ANY BUYER OR USER ACKNOWLEDGES THAT THE BUYER OR USER ALONE HAS
DETERMINED THAT THE PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR
INTENDED USE. OMRON DISCLAIMS ALL OTHER WARRANTIES, EXPRESS OR IMPLIED.
LIMITATIONS OF LIABILITY
OMRON SHALL NOT BE RESPONSIBLE FOR SPECIAL, INDIRECT, OR CONSEQUENTIAL DAMAGES,
LOSS OF PROFITS OR COMMERCIAL LOSS IN ANY WAY CONNECTED WITH THE PRODUCTS,
WHETHER SUCH CLAIM IS BASED ON CONTRACT, WARRANTY, NEGLIGENCE, OR STRICT
LIABILITY.
In no event shall the responsibility of OMRON for any act exceed the individual price of the product on
which liability is asserted.
IN NO EVENT SHALL OMRON BE RESPONSIBLE FOR WARRANTY, REPAIR, OR OTHER CLAIMS
REGARDING THE PRODUCTS UNLESS OMRON'S ANALYSIS CONFIRMS THAT THE PRODUCTS
WERE PROPERLY HANDLED, STORED, INSTALLED, AND MAINTAINED AND NOT SUBJECT TO
CONTAMINATION, ABUSE, MISUSE, OR INAPPROPRIATE MODIFICATION OR REPAIR.
3
Application Considerations
SUITABILITY FOR USE
OMRON shall not be responsible for conformity with any standards, codes, or regulations that apply to the
combination of products in the customer's application or use of the products.
At the customer's request, OMRON will provide applicable third party certification documents identifying
ratings and limitations of use that apply to the products. This information by itself is not sufficient for a
complete determination of the suitability of the products in combination with the end product, machine,
system, or other application or use.
The following are some examples of applications for which particular attention must be given. This is not
intended to be an exhaustive list of all possible uses of the products, nor is it intended to imply that the
uses listed may be suitable for the products:
•
Outdoor use, uses involving potential chemical contamination or electrical interference, or conditions or
uses not described in this manual.
• Nuclear energy control systems, combustion systems, railroad systems, aviation systems, medical
equipment, amusement machines, vehicles, safety equipment, and installations subject to separate
industry or government regulations.
• Systems, machines, and equipment that could present a risk to life or property.
Please know and observe all prohibitions of use applicable to the products.
NEVER USE THE PRODUCTS FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR
PROPERTY WITHOUT ENSURING THAT THE SYSTEM AS A WHOLE HAS BEEN DESIGNED TO
ADDRESS THE RISKS, AND THAT THE OMRON PRODUCTS ARE PROPERLY RATED AND
INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL EQUIPMENT OR SYSTEM.
PROGRAMMABLE PRODUCTS
OMRON shall not be responsible for the user's programming of a programmable product, or any
consequence thereof.
4

Disclaimers
CHANGE IN SPECIFICATIONS
Product specifications and accessories may be changed at any time based on improvements and other
reasons.
It is our practice to change model numbers when published ratings or features are changed, or when
significant construction changes are made. However, some specifications of the products may be changed
without any notice. When in doubt, special model numbers may be assigned to fix or establish key
specifications for your application on your request. Please consult with your OMRON representative at any
time to confirm actual specifications of purchased products.
DIMENSIONS AND WEIGHTS
Dimensions and weights are nominal and are not to be used for manufacturing purposes, even when
tolerances are shown.
PERFORMANCE DATA
Performance data given in this manual is provided as a guide for the user in determining suitability and
does not constitute a warranty. It may represent the result of OMRON's test conditions, and the users must
correlate it to actual application requirements. Actual performance is subject to the OMRON Warranty and
Limitations of Liability.
ERRORS AND OMISSIONS
The information in this manual has been carefully checked and is believed to be accurate; however, no
responsibility is assumed for clerical, typographical, or proofreading errors, or omissions.
5
General Warnings
To ensure safe and proper use of SMARTSTEP Junior Servomotors and Servo Drivers, read the general
warnings provided below along with the rest of this manual to gain sufficient knowledge of the devices, safety
information, and precautions before actual use.
This OPERATION MANUAL is to be delivered to the actual end users of the products.
Please keep this manual close at hand for future reference.
The following conventions are used to indicate and classify precautions in this manual. Always heed
the information provided with them. Failure to heed precautions can result in injury to people or
damage to property.
Indicates a potentially hazardous situation which, if not avoided, could result in
death or serious injury. Additionally, there may be severe property damage.
Indicates a potentially hazardous situation which, if not avoided, may result in
minor or moderate injury, or property damage.
6
General Warnings
• This manual may include illustrations of the product with protective covers or shields removed in order
to describe the components of the product in detail. Make sure that these protective covers and shields
are on the product before use.
• Consult your OMRON representative when using the product after a long period of storage.
WARNING
Always connect the frame ground terminals of the Servo Driver and the Servomotor to a
class-3 ground (to 100 Ω or less). Not connecting to a class-3 ground may result in electric
shock.
Do not touch the inside of the Servo Driver. Doing so may result in electric shock.
Do not remove the front cover, terminal covers, cables, or optional items while the power is
being supplied. Doing so may result in electric shock.
Installation, operation, maintenance, or inspection must be performed by authorized
personnel. Not doing so may result in electric shock or injury.
Wiring or inspection must not be performed for at least five minutes after turning OFF the
power supply. Doing so may result in electric shock.
Do not damage, press, or put excessive stress or heavy objects on the cables.
Doing so may result in electric shock.
Do not touch the rotating parts of the Servomotor in operation. Doing so may result in injury.
Do not modify the product. Doing so may result in injury or damage to the product.
Provide a stopping mechanism on the machine to ensure safety. The holding brake is not
designed as a stopping mechanism for safety purposes.
Provide an external emergency stopping mechanism that can stop operation and shutting
off the power supply immediately. Not doing so may result in injury.
Do not come close to the machine immediately after resetting momentary power
interruption to avoid an unexpected restart. (Take appropriate measures to secure safety
against an unexpected restart.) Doing so may result in injury.
7
General Warnings
CAUTION
Use the Servomotors and Servo Drivers in a specified combination. Using them incorrectly
may result in fire or damage to the products.
Do not store or install the product in the following places. Doing so may result in fire, electric
shock, or damage to the product
• Locations subject to direct sunlight.
• Locations subject to temperatures or humidity outside the range specified in the
specifications.
• Locations subject to condensation as the result of severe changes in temperature.
• Locations subject to corrosive or flammable gases.
• Locations subject to dust (especially iron dust) or salts.
• Locations subject to shock or vibration.
• Locations subject to exposure to water, oil, or chemicals.
Do not touch the Servo Driver radiator, Servo Driver regeneration resistor, or Servomotor
while the power is being supplied or soon after the power is turned OFF.
Doing so may result in a skin burn due to the hot surface.
Storage and Transportation Precau tions
CAUTION
Do not hold the product by the cables or motor shaft while transporting it. Doing so may result
in injury or malfunction.
Do not place any load exceeding the figure indicated on the product. Doing so may result in
injury or malfunction.
8
General Warnings
Installation and Wiring Precautions
CAUTION
Do not step on or place a heavy object on the product. Doing so may result in injury.
Do not cover the inlet or outlet ports and prevent any foreign objects from entering the product.
Doing so may result in fire.
Be sure to install the product in the correct direction. Not doing so may result in malfunction.
Provide the specified clearances between the Servo Driver and the control panel or with other
devices. Not doing so may result in fire or malfunction.
Do not apply any strong impact. Doing so may result in malfunction.
Be sure to wire correctly and securely. Not doing so may result in motor runaway, injury, or
malfunction.
Be sure that all the mounting screws, terminal screws, and cable connector screws are
tightened to the torque specified in the relevant manuals. Incorrect tightening torque may
result in malfunction.
Use crimp terminals for wiring. Do not connect bare stranded wires directly to terminals.
Connection of bare stranded wires may result in burning.
Always use the power supply voltage specified in the User’s Manual. An incorrect voltage may
result in malfunction or burning.
Take appropriate measures to ensure that the specified power with the rated voltage and
frequency is supplied. Be particularly careful in places where the power supply is unstable. An
incorrect power supply may result in malfunction.
Install external breakers and take other safety measures against short-circuiting in external
wiring. Insufficient safety measures against short-circuiting may result in burning.
Take appropriate and sufficient countermeasures when installing systems in the following
locations. Failure to do so may result in damage to the product.
• Locations subject to static electricity or other forms of noise.
• Locations subject to strong electromagnetic fields and magnetic fields.
• Locations subject to possible exposure to radioactivity.
• Locations close to power supplies.
9
General Warnings
Operation and Adjustment Precautions
CAUTION
Confirm that no adverse effects will occur in the system before performing the test operation.
Not doing so may result in equipment damage.
Check the newly set parameters and switches for proper execution before actually running
them. Not doing so may result in equipment damage.
Do not make any extreme adjustments or setting changes. Doing so may result in unstable
operation and injury.
Separate the Servomotor from the machine, check for proper operation, and then connect to
the machine. Not doing so may cause injury.
When an alarm occurs, remove the cause, reset the alarm after confirming safety, and then
resume operation. Not doing so may result in injury.
Do not use the built-in brake of the Servomotor for ordinary braking. Doing so may result in
malfunction.
Do not operate the Servomotor connected to a load that exceeds the applicable load moment
of inertia. Doing so may result in malfunction.
Maintenance and Inspection Precautio ns
CAUTION
Do not attempt to disassemble, repair, or modify any Units. Any attempt to do so may result
in malfunction, fire, or electric shock.
Resume operation only after transferring to the new Unit the contents of the data required
for operation. Not doing so may result in an unexpected operation.
10
General Warnings
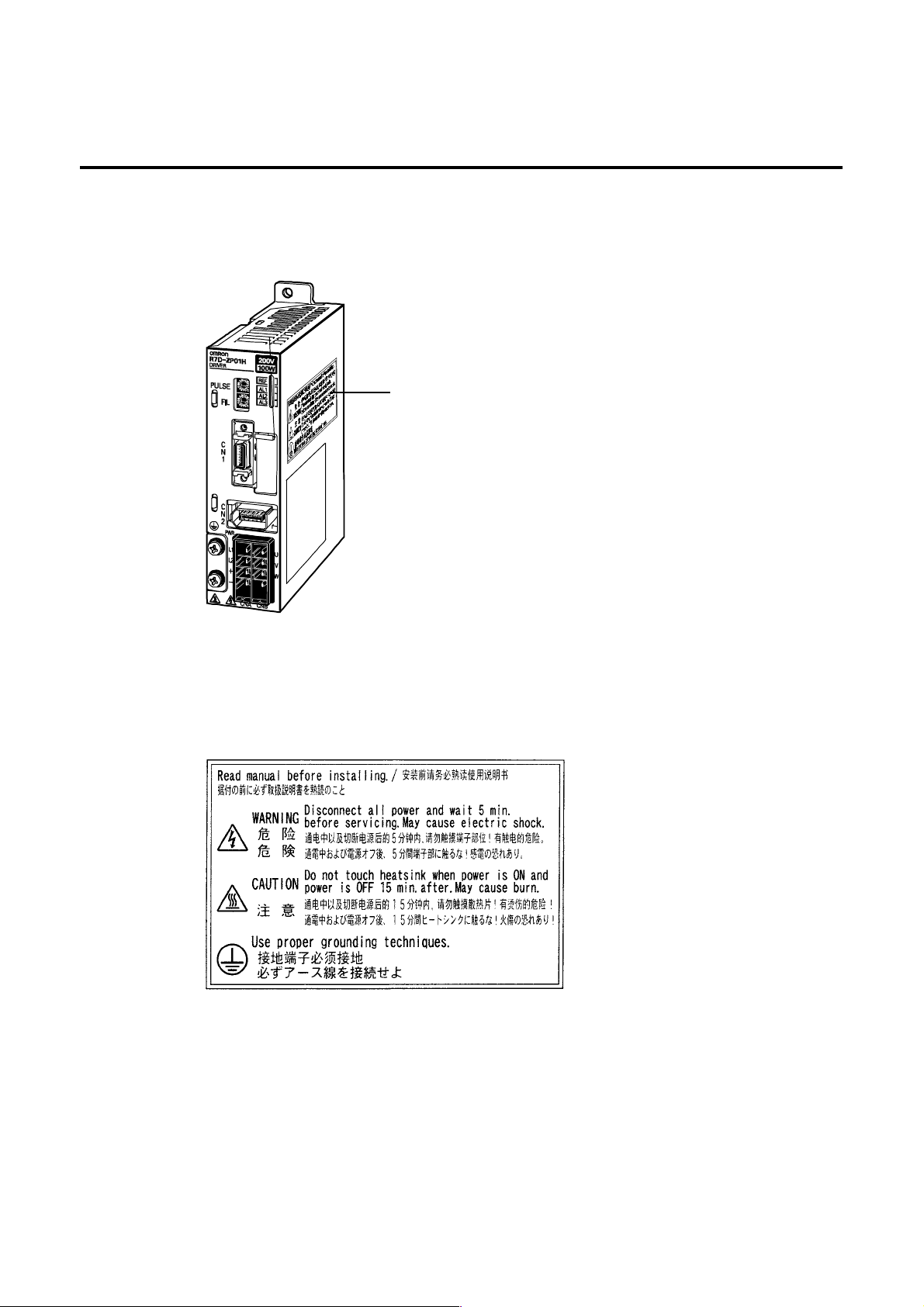
Warning Labels
Warning labels are pasted on the product as shown in the following illustration. Be sure to
follow the instructions given there.
Warning label
Example from R7D-ZP01H
Warning Label Contents
11
Items to Check When Unpacking
Check the following items after removing the product from the package.
Item Method
Has the correct product been delivered? Check the model number on the namepl ate on the side of
the product.
Has the product been damaged in
shipping?
Inspect the outside of the product and carefully check that
there has been no damage during shi pping.
• Accessories
1. Special screw driver for setting the rotary switch × 1
2. Safety Precautions document × 1
No connectors or mounting screws are provided. Obtain these separately.
If something is missing, the Servo Driver is damaged, or some other fault exists, please
contact the point of purchase or your OMRON representative.
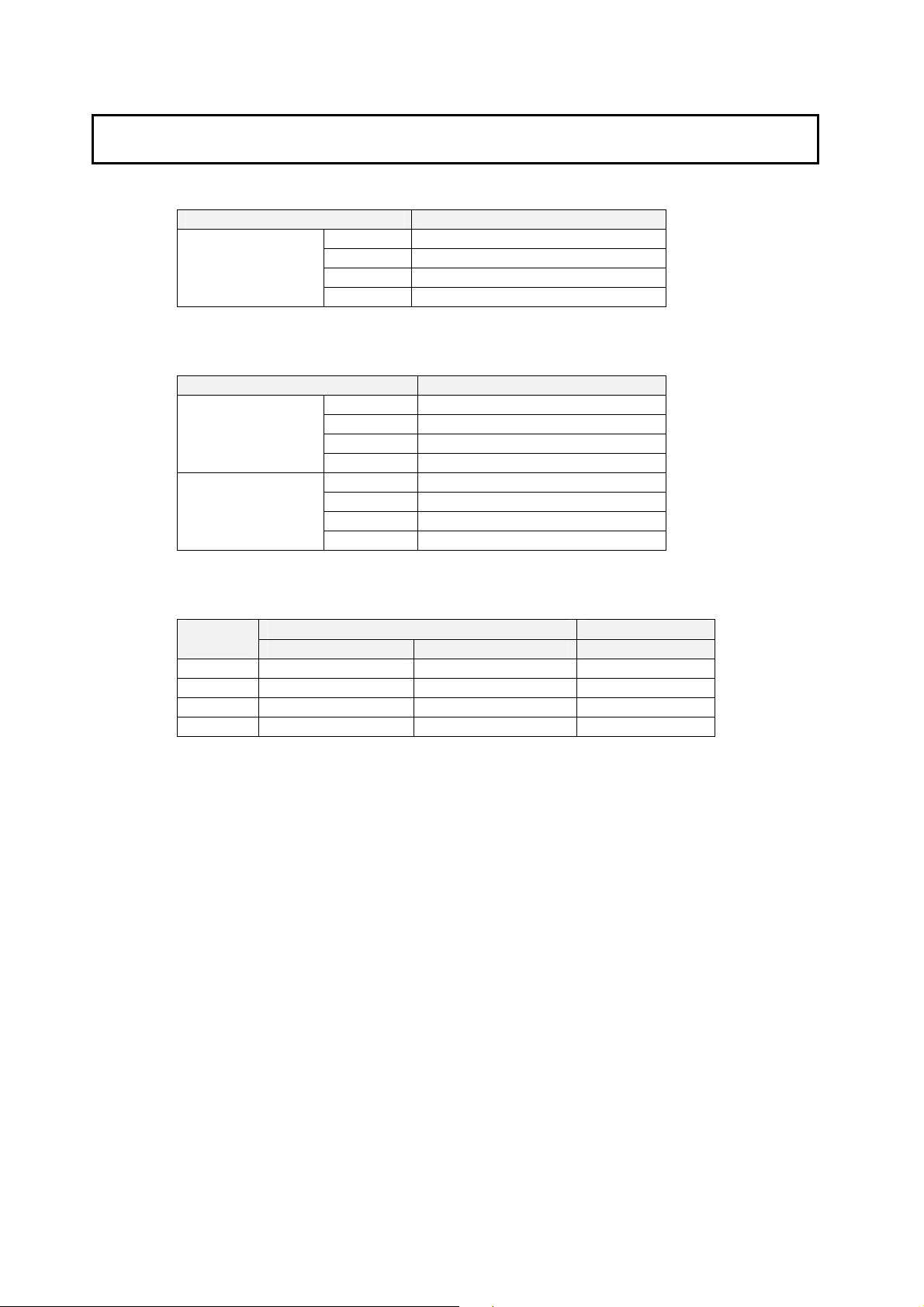
• Interpreting the Model Number
The model number provides information such as the Servo Driver type, the applicable
Servomotor capacity, and the power supply voltage.
R7D-ZP01H
SMARTSTEP Junior
Servo Driver
Driver Type
P: Pulse string input
12
Applicable Servomotor Capacit y
01: 100 W
02: 200 W
04: 400 W
08: 750 W
Power Supply Voltage
H: 200 VAC
• Servo Driver and Servomotor Combinations
Rated
output
100 W R7M-Z10030-S1 R7M-Z10030-B S1 R7D-ZP01H
200 W R7M-Z20030-S1 R7M-Z20030-B S1 R7D-ZP02H
400 W R7M-Z40030-S1 R7M-Z40030-B S1 R7D-ZP04H
750 W R7M-Z75030-S1 R7M-Z75030-B S1 R7D-ZP08H
Without brake With brake Pulse string input
Servomotor Servo Driver
Section 1 Features and System Configuration
Section 2 Standard Models and Dimensions
Section 3 Specifications
Section 4 System Design
Section 5 Operation
Section 6 Troubleshooting
Appendix
13

Contents
Read and Understand this Manual.................................................................................3
Warranty and Limitations of Liability...............................................................................3
Application Considerations.............................................................................................4
Disclaimers....................................................................................................................5
General Warnings..........................................................................................................6
Items to Check When Unpacking................................................................................. 12
Contents ..................................................................................................................... 14
Section 1 Features and System Configuration
1-1 Introduction....................................................................................................1-2
1-1-1 Introduction ................................................................................................................... 1-2
1-1-2 SMARTSTEP Junior Features...................................................................................... 1-2
1-2 System Configuration.....................................................................................1-3
1-3 Nomenclature and Functions.........................................................................1-4
1-3-1 Servo Driver Nomenclature and Functions................................................................... 1-4
1-4 System Block Diagrams.................................................................................1-6
1-4-1 Pulse-train Input Servo Driver....................................................................................... 1-6
1-5 Applicable Standards.....................................................................................1-7
1-5-1 EC Directives ................................................................................................................ 1-7
1-5-2 UL and cUL Standards ................................................................................................. 1-7
Section 2 Standard Models and Dimensions
2-1 Standard Models ............................................................................................2-2
2-1-1 Servo Drivers................................................................................................................ 2-2
2-1-2 Servomotors.................................................................................................................. 2-2
2-1-3 Servo Driver-Servomotor Combinations....................................................................... 2-2
2-1-4 Decelerators (Straight Shaft with Key).......................................................................... 2-3
2-1-5 Accessories and Cables ............................................................................................... 2-4
2-2 External and Mounted Dimensions ................................................................2-5
2-2-1 Servo Drivers................................................................................................................ 2-5
2-2-2 Servomotors.................................................................................................................. 2-7
2-2-3 Decelerator Dimensions ............................................................................................... 2-9
Section 3 Specifications
3-1 Servo Driver Specifications............................................................................3-2
3-1-1 General Specifications.................................................................................................. 3-2
3-1-2 Characteristics .............................................................................................................. 3-3
3-1-3 Main Circuit and Servomotor Connector Specifications (CNA and CNB) .................... 3-3
14

3-1-4 Control I/O Specifications (CN1)................................................................................... 3-5
3-1-5 Control Input Circuits .................................................................................................... 3-7
3-1-6 Control Input Details ..................................................................................................... 3-8
3-1-7 Control Output Circuits ...............................................................................................3-10
3-1-8 Control Output Details ................................................................................................ 3-10
3-1-9 Encoder Connector Specifications (CN2)...................................................................3-11
3-2 Servomotor Specifications...........................................................................3-13
3-2-1 General Specifications................................................................................................ 3-13
3-2-2 Characteristics ............................................................................................................ 3-14
3-2-3 Encoder Specifications ............................................................................................... 3-16
3-3 Decelerator Specifications...........................................................................3-17
3-3-1 Standard Models and Specifications .......................................................................... 3-17
3-4 Cable and Connector Specifications............................................................3-18
3-4-1 Control Cable Specifications....................................................................................... 3-18
3-4-2 Servomotor Power Cable Specifications .................................................................... 3-19
3-4-3 Encoder Cable Specifications..................................................................................... 3-21
3-4-4
Connector Specifications............................................................................................ 3-22
3-5 Regeneration Resistance Unit......................................................................3-24
3-5-1 Regeneration Resistance Unit (R88A-RG08UA) Specifications ................................ 3-24
3-6 AC Reactors................................................................................................3-26
3-6-1 AC Reactor Specifications..........................................................................................3-26
Section 4 System Design
4-1 Installation Conditions....................................................................................4-2
4-1-1 Servo Drivers................................................................................................................ 4-2
4-1-2 Servomotors.................................................................................................................. 4-3
4-1-3 Decelerators.................................................................................................................. 4-5
4-2 Wiring ............................................................................................................4-6
4-2-1 Connecting Cables........................................................................................................ 4-6
4-2-2 Selecting Connecting Cables........................................................................................ 4-7
4-2-3 Peripheral Device Connection Examples ..................................................................... 4-8
4-2-4 Wiring the Main Circuit and Servomotor Connections.................................................. 4-9
4-2-5 Conforming to EMC Directives ................................................................................... 4-11
4-3 Regenerative Energy Absorption .................................................................4-21
4-3-1 Calculating the Regenerati ve Ener g y ......................................................................... 4-21
4-3-2 Servo Driver Regenerative Energy Absorption Capacity............................................ 4-23
4-3-3 Absorbing Regenerati ve Ener g y with an External Res is tor........................................ 4-23
Section 5 Operation
5-1 Operational Procedure...................................................................................5-2
5-1-1 Operational Procedure.................................................................................................. 5-2
5-2 Switch Settings..............................................................................................5-3
5-2-1 Switch Names...............................................................................................................5-3
15

5-2-2 Switch Functions........................................................................................................... 5-3
5-3 Preparing for Operation..................................................................................5-5
5-3-1 Turning ON the Power and Checking Indicators .......................................................... 5-5
5-4 Trial Operation...............................................................................................5-7
5-4-1 Preparing for Trial Operation ........................................................................................ 5-7
5-4-2 Trial Operation .............................................................................................................. 5-7
5-5 Operating Functions.......................................................................................5-9
5-5-1 Brake Interlock..............................................................................................................5-9
Section 6 Troubleshooting
6-1 Error Processing............................................................................................6-2
6-1-1 Preliminary Checks when a Problem Occurs ............................................................... 6-2
6-1-2 Precautions When Troubleshooting.............................................................................. 6-3
6-1-3 Replacing the Servomotor and Servo Driver................................................................6-3
6-2 Alarm Table...................................................................................................6-4
6-2-1 Alarm Table................................................................................................................... 6-4
6-3 Troubleshooting.............................................................................................6-5
6-3-1 Error Diagnosis using the Alarm Indicators .................................................................. 6-5
6-3-2 Error Diagnosis using the Operating Stat us ................................................................. 6-8
6-4 Overload Characteristics (Electronic Thermal Function)...............................6-11
6-4-1 Overload Character istics Graphs................................................................................ 6-11
6-5 Periodic Maintenance ..................................................................................6-12
6-5-1 Servomotor Maintenance............................................................................................ 6-12
6-5-2 Servo Driver Maintenance .......................................................................................... 6-13
6-5-3 Replacing the Cooling Fan ......................................................................................... 6-13
Appendix
A-1 Connection Examples....................................................................................A-2
Revision History......................................................................................................... R-1
16
Section 1 Features and System Configuration

1-1 Introduction
1-1-1 Introduction
1-1 Introduction
1-1-1 Introduction
The SMARTSTEP Junior is a Servo Driver with a pulse-string input for position control.
The SMARTSTEP Junior is easy to set up and start because it does not require the
complex parameter settings and Servo adjustments normally associated with Servos.
The SMARTSTEP Junior Servomotor and Servo Driver are easy-to-use, yet provide the
responsiveness, high-speed, high-torque, and precision of traditional Servo systems.
This manual describes the SMARTSTEP Junior as a pulse-string input Servo Driver for
position control.
1-1-2 SMARTSTEP Junior Features
The SMARTSTEP Junior has the following features.
No Setup Parameters
No parameter settings are required for setup, so you can start using the Servo Driver
immediately simply by removing it from the box and wiring it. If it is necessary to set the
positioning resolution or reference pulse method, these settings can be set or changed
easily with the rotary switches on the front of the Servo Driver.
No Servo Adjustments Required
With the newest auto-tuning function, it isn’t necessary to adjust the Servo Driver to
achieve excellent responsiveness. Auto-tuning achieves excellent responsiveness while
providing compatibility with a range of stepping motors. A Servomotor with moderate
inertia is used to improve control system stability.
1-2
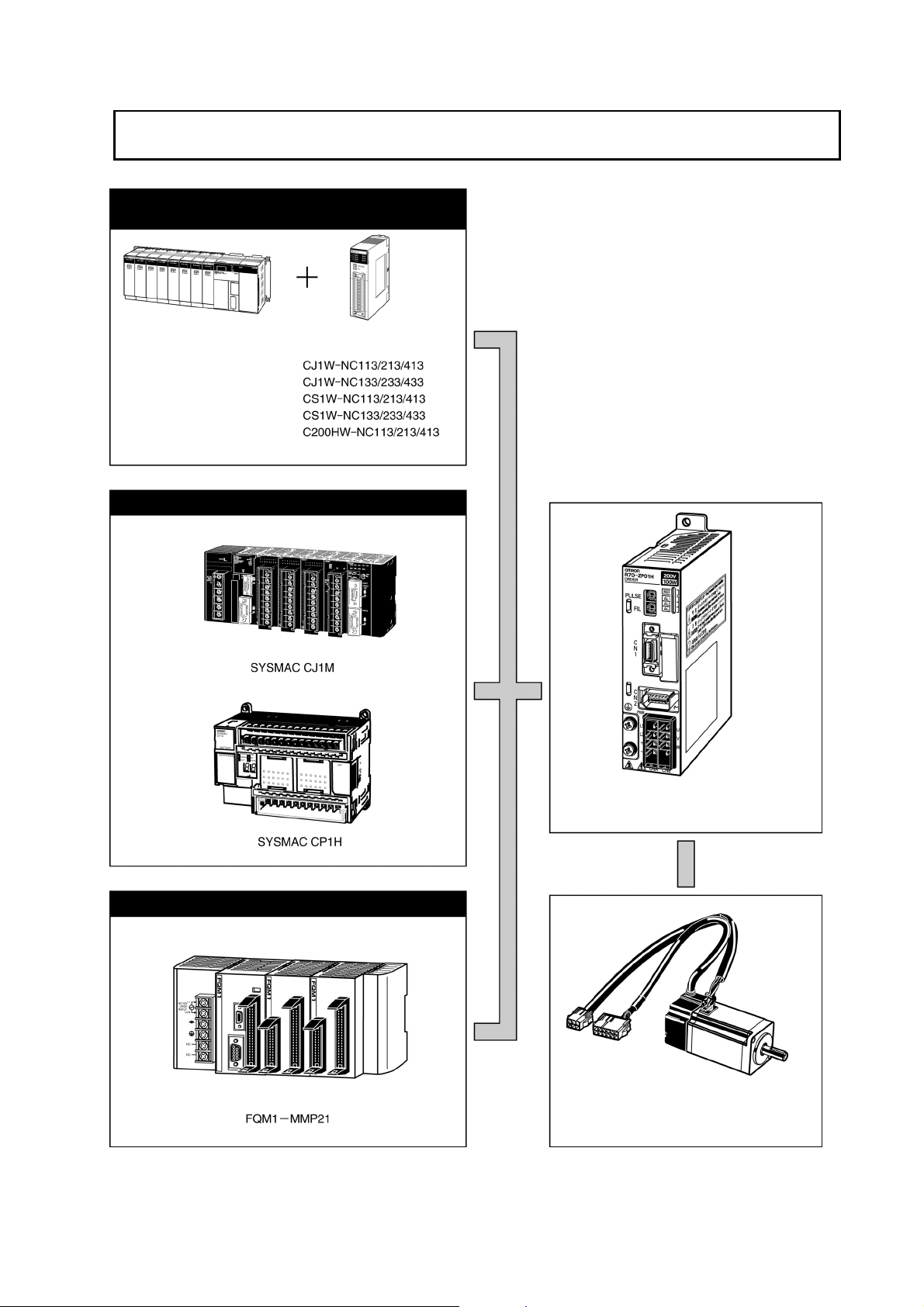
1-2 System Configuration
SYSMAC PLC + Position Control Unit
with pulse-string output
Pulse string
1-2 System Configuration
SYSMAC
Position Control Unit
CJ1/CS1/C-series
Programmable Controlle r
SYSMAC PLC with pulse output functions
SMARTSTEP Junior Servo Driver
R7D-ZP@
Flexible Motion Controller with pulse I/O
SMARTSTEP Junior Servomotor
R7M-Z@
1-3
1-3 Nomenclature and Functions
r
r
r
1-3-1 Servo Driver Nomenclature and Functions
1-3 Nomenclature and Functions
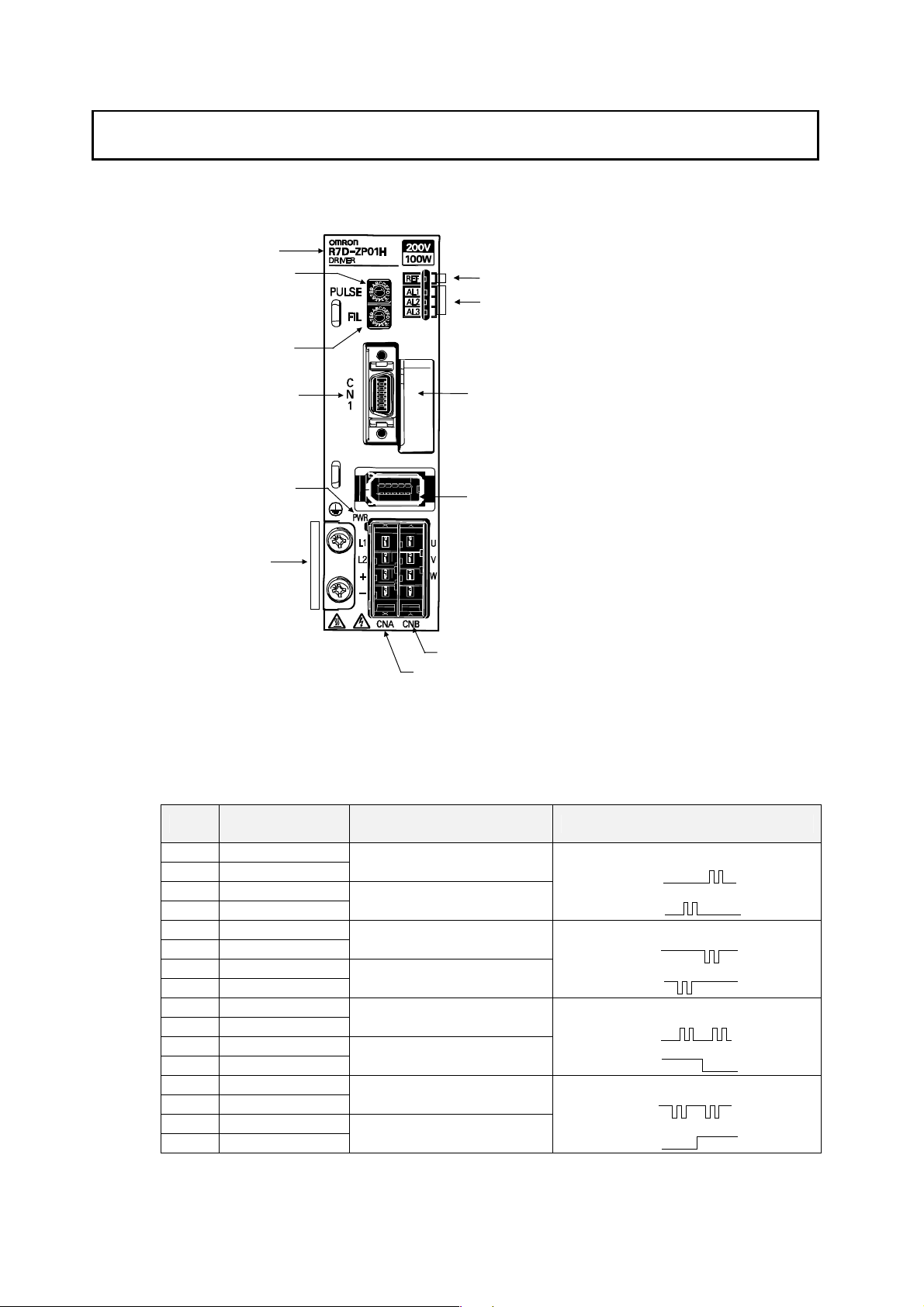
1-3-1 Servo Driver Nomenclature and Functions
Rotary switch for settin g
command pulse (PULSE) Command indicators (REF)
Rotary switch for settin g
command filter (FIL)
Model
Alarm indicators (AL1 to AL3)
Control I/O
connector (CN1)
Power supply indicato
(PWR)
FG terminals fo
power supply and
servomotor power
Main circuit connector (CNA)
Note: Do not remove the protective cov ers f or
these connectors.
These connectors are for manufacturer
adjustments.
Do not use these connectors.
The Servo Driver may malfunction if
these connectors are used.
Encoder input connector (CN2)
Moto
connector (CNB)
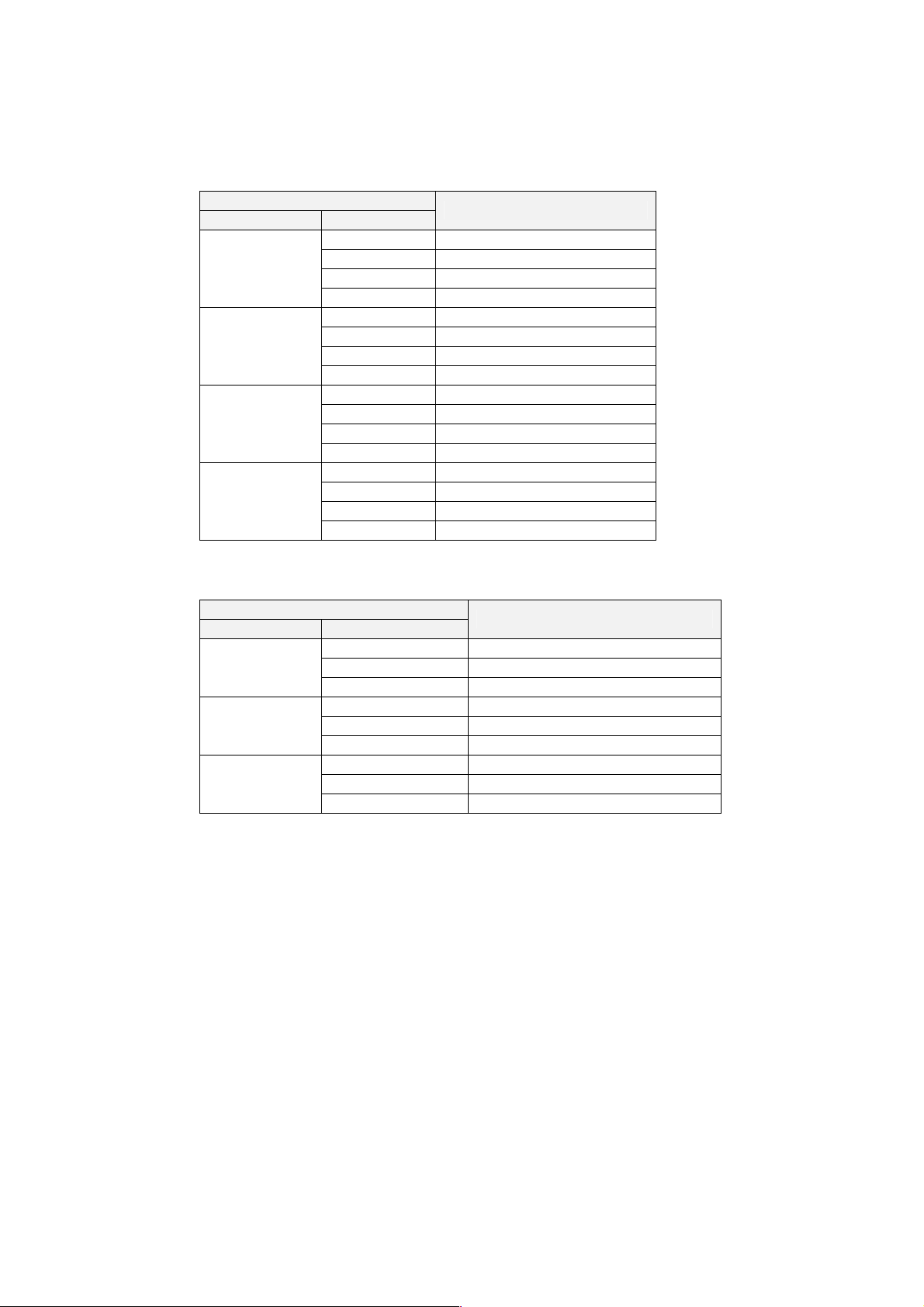
Rotary Switch for Setting Command Pulse (PULSE)
Always turn OFF the power supply before setting the rotary switch. (The switch is
factory-set to 0.)
Setting
Command pulse
resolution
0 1000
1 2500
2 5000
3 10000
4 1000
5 2500
6 5000
7 10000
8 1000
9 2500
A 5000
B 10000
C 1000
D 2500
E 5000
F 10000
Command pulse connection
method
Open collector or line driver
Line driver
Open collector or line driver
Line driver
Open collector or line driver
Line driver
Open collector or line driver
Line driver
Command pulse type
CW+CCW, positive logic
CW
CCW
CW+CCW, negative logic
CW
CCW
Sign + pulse string, positive
logic
PULS
SIGN
Sign + pulse string, negative
logic
PULS
SIGN
1-4
1-3 Nomenclature and Functions
1-3-1 Servo Driver Nomenclature and Functions
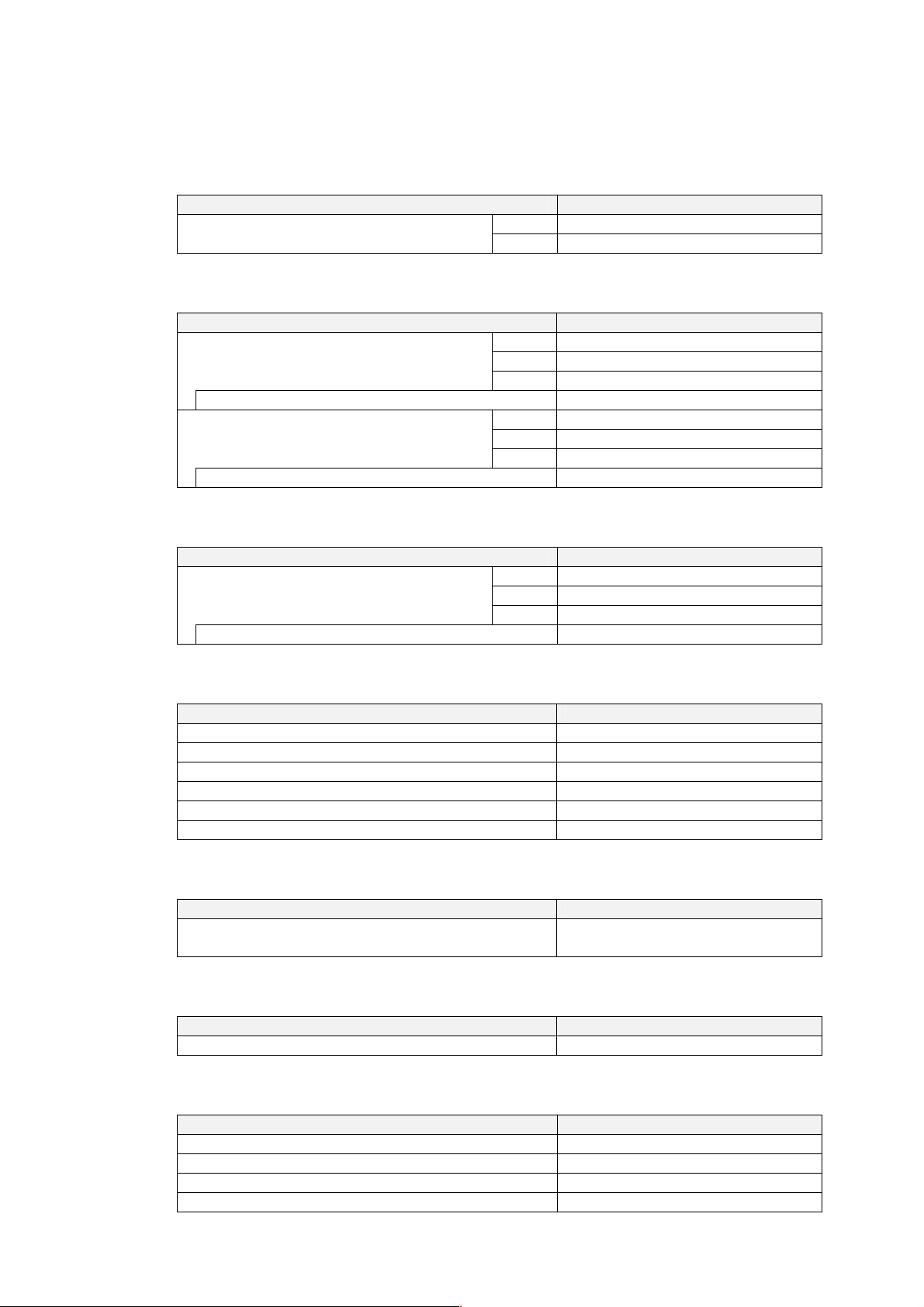
Rotary Switch for Setting Command Filter (FIL)
This switch does not need to be set if the machine is not subject to vibration. (The switch
is factory-set to 0.)
Filter
setting
(See
note 1.)
0 45 ms 100 to 200 ms
1 50 ms 110 to 220 ms
2 60 ms 130 to 260 ms
3 65 ms 150 to 300 ms
4 70 ms 170 to 340 ms
5 80 ms 200 to 400 ms
6 85 ms 250 to 500 ms
7 170 ms 500 to 1,000 ms
8 to F
Acceleration/deceleration
time for STEP command
(See note 3.)
Approx. time from end of
command to end of
positioning (s ettling time)
Description
(See note 2.)
Smaller filter time
constant
(short positioning time)
Larger filter time constant
(longer positioning time
with little vibration)
Do not set this switch to 8 to F.
Note 1. Increase the value of the filter setting if there is vibration when starting or stopping.
2. The settling time depends on the commanded acceleration/deceleration, the rigidity
of the machine motor drive, the encoder resolution, and other factors.
3. Use the acceleration/deceleration times as a guideline for determining the
Servomotor capacity that can be driven when using STEP commands without
commanded acceleration/deceleration.
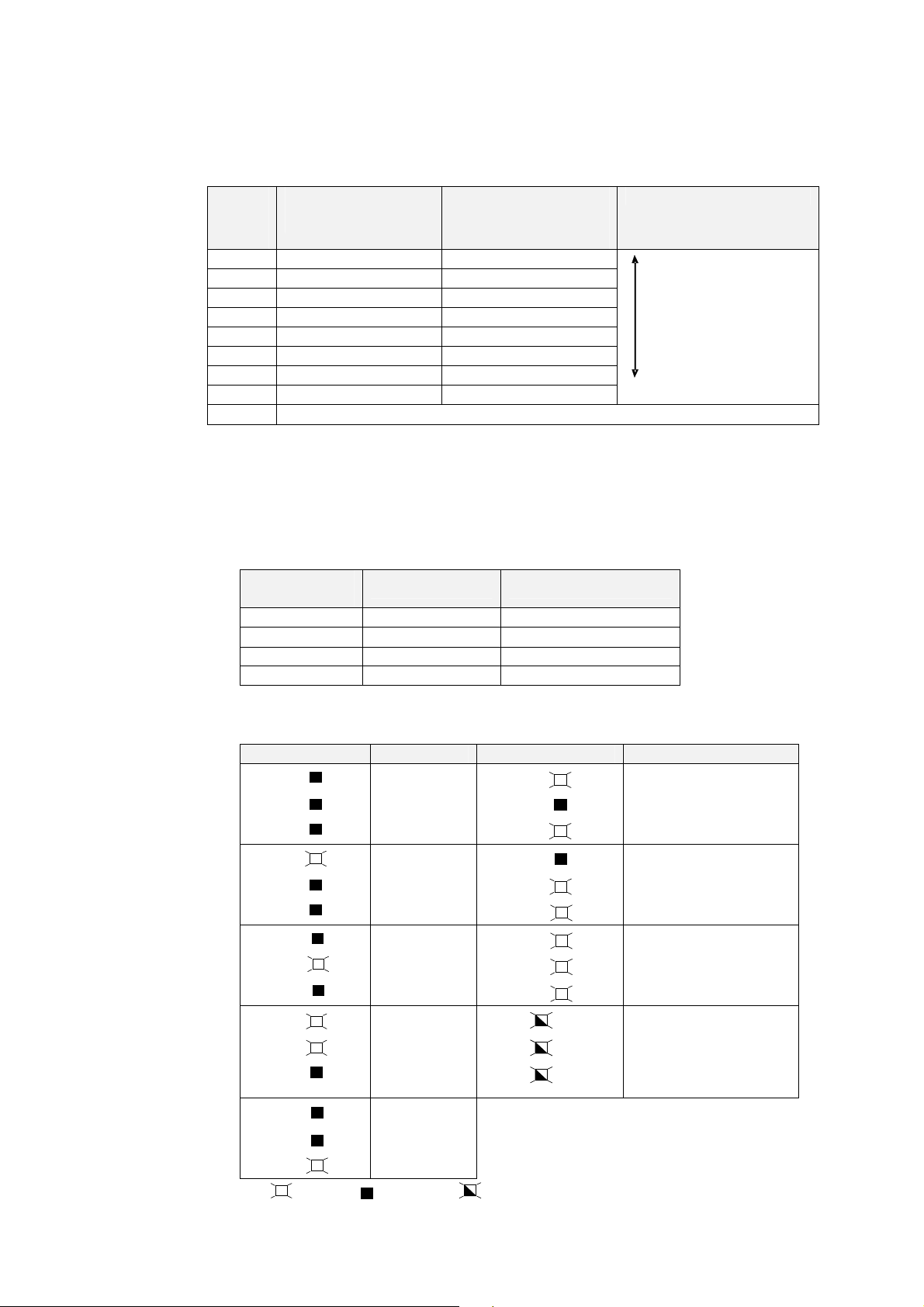
Command Indicators (REF)
Indicator
(See note.)
Lit orange. OFF None
Flashing orange. OFF Pulse being input.
Lit green. ON None
Flashing green. ON Pulse being input.
Note: The indicator stays lit (yellow) for 1 s when there is a deviation counter reset input.
Power to motor Command pulse
Alarm Indicators (AL1/AL2/AL3)
Indicator status Alarm Indicator Alarm
AL1
AL2
AL3
AL1
AL2
AL3
AL1
AL2
AL3
AL1
AL2
AL3
AL1
AL2
AL3
Normal
Overspeed
Overload
Encoder error
Voltage error
Lit: Not lit: Flashing:
AL1
AL2
AL3
AL1
AL2
AL3
AL1
AL2
AL3
AL1
AL2
AL3
Flashing at a constant interval.
Overcurrent
Servo Driver built-in fan is
stopped
System error
Rotary switch for setting
command pulse (PULSE)
has been changed.
1-5
1-4 System Block Diagrams
‡
,
p
g
1-4-1 Pulse-string Input Servo Driver
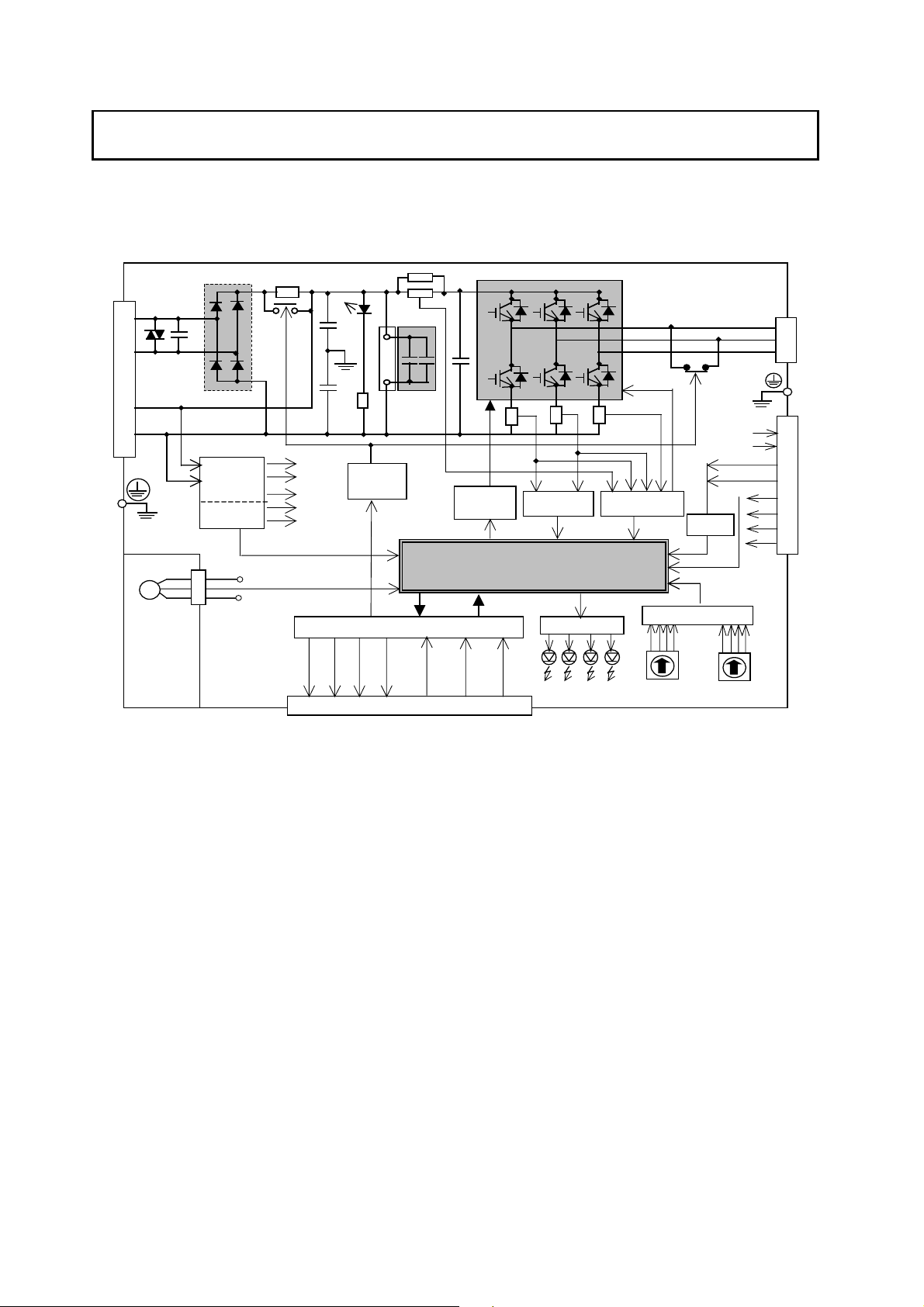
1-4 System Block Diagrams
1-4-1 Pulse-string Input Servo Driver
GR
L1
L2
P
N
FAN
U
V
W
GR
+VCC
G
SW power
supply
Main circuit
control
Control power
supply
G
-VCC
15V2
VCC2
+VCC
-VCC
G
Main circuit voltage
detection
Fan alarm
INP output
output
Alarm
Relay
drive
Position, speed, and torque processor
I/O and drive circuits
Brake out
ut
Run input
output
Origin
Control I/O connector
Gate
drive
CCW input
Current
detection
MPU & ASIC
Display circuit
CW input
Overcurrent
protection
Set value read circuit
Command
format setting
+A,-A
-B
+B
Phase U
Phase V
Phase W
ADC
Phase Z
Command filter
setting
nal input connector
Encoder si
1-6
1-5 Applicable Standards
1-5-1 EC Directives
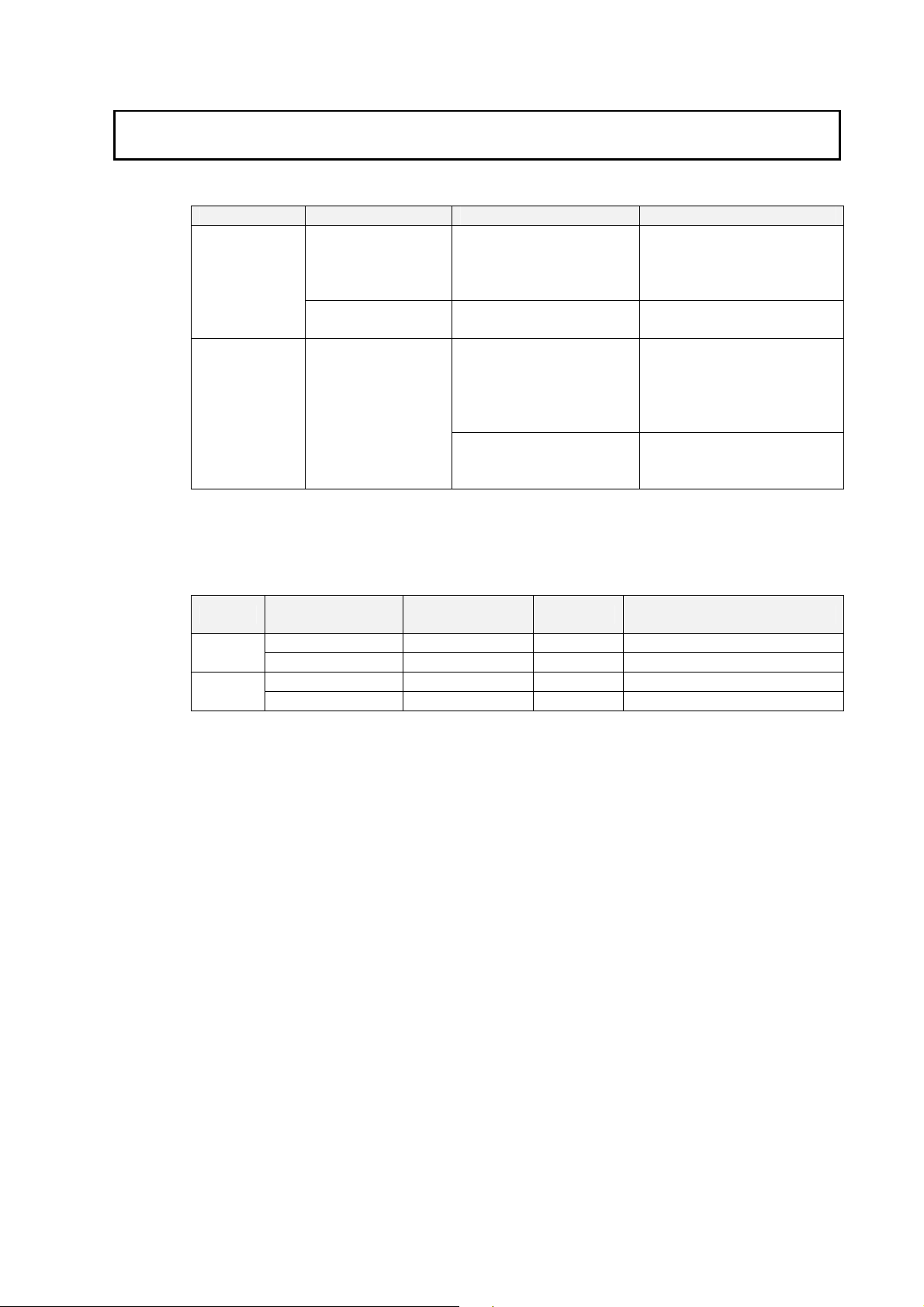
EC Directive Product Applicable standards Comments
Low Voltage
Directive
EMC Directive
Note: To conform to EMC Directives, the Units must be installed under the conditions described
AC Servo Drivers EN 50178
AC Servomotors
AC Servo Drivers and
AC Servomotors
in 4-2-5 Conforming to EMC Directives.
IEC 60034-1, -5, -8, and -9
EN 60034-1 and -9
EN 550011 Class A Group1
EN 61000-6-2
1-5 Applicable Standards
1-5-1 EC Directives
Safety requirements for
electronic equi pment for
measurement, contr ol, or
laboratory use
Rotating electric machines
Limits and methods of
measurement of radio
disturbance of i ndustrial,
scientific, and medical
radio-frequency equi pment
Electromagnetic compatibility
(EMC): Immunity st andard for
industrial environments
1-5-2 UL and cUL Standards
Standard Product
UL
cUL
AC Servo Drivers UL 508C E179149 Power Conversion Equipment
AC Servomotors UL 1004 E179189 Electric Motors
AC Servo Drivers cUL C22.2 No.14 E179149 Industrial Control Equipment
AC Servomotors cUL C22.2 No.100 E179189 Motors and Generation Equipment
Applicable
standards
File number Comments
1-7

1-5 Applicable Standards
1-5-2 UL and cUL Standards
1-8
Section 2
Standard Models and
Dimensions
2-1 Standard Models
2-1-1 Servo Drivers
2-1 Standard Models
2-1-1 Servo Drivers
Pulse string input
2-1-2 Servomotors
Without brake
With brake
Specifications Model
100 W R7D-ZP01H
200 W R7D-ZP02H
400 W R7D-ZP04H
750 W R7D-ZP08H
Specifications Model
100 W R7M-Z10030-S1
200 W R7M-Z20030-S1
400 W R7M-Z40030-S1
750 W R7M-Z75030-S1
100 W R7M-Z10030-BS1
200 W R7M-Z20030-BS1
400 W R7M-Z40030-BS1
750 W R7M-Z75030-BS1
2-1-3 Servo Driver-Servomotor Combinations
Servomotor Servo Driver Rated
output
100 W
200 W
400 W
750 W
Note: Only the Servomotor and Servo Driver combinations listed here can be used. Do not use
Without brake With brake Pulse string input
R7M-Z10030-S1 R7M-Z10030-BS1 R7D-ZP01H
R7M-Z20030-S1 R7M-Z20030-BS1 R7D-ZP02H
R7M-Z40030-S1 R7M-Z40030-BS1 R7D-ZP04H
R7M-Z75030-S1 R7M-Z75030-BS1 R7D-ZP08H
other combinations.
2-2
2-1-4 Decelerators (Straight Shaft with Key)
2-1-4 Decelerators (Straight Shaft with Key)
Backlash: 3 Arcminutes Max.
2-1 Standard Models
Specifications
Motor capacity Gear ratio
1/5 R7G-VRSFPB05B100
100 W
200 W
400 W
750 W
1/9 R7G-VRSFPB09B100
1/15 R7G-VRSFPB15B100
1/25 R7G-VRSFPB25C100
1/5 R7G-VRSFPB05B200
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB15C400
1/25 R7G-VRSFPB25C200
1/5 R7G-VRSFPB05C400
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB15C400
1/25 R7G-VRSFPB25D400
1/5 R7G-VRSFPB05C750
1/9 R7G-VRSFPB09D750
1/15 R7G-VRSFPB15D750
1/25 R7G-VRSFPB25E750
Model
Backlash: 45 Arcminutes Max.
Specifications
Motor capacity Gear ratio
1/5 R7G-RGSF05B100
100 W
200 W
400 W
1/9 R7G-RGSF09B100
1/15 R7G-RGSF15B100
1/5 R7G-RGSF05B200
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
1/5 R7G-RGSF05C400
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
Model
2-3
2-1 Standard Models
2-1-5 Accessories and Cables
2-1-5 Accessories and Cables
Control Cables (for CN1)
Specifications Model
Servomotor Power Cables (for CNB)
Specifications Model
Power Cables for Servomotors without B rakes
(connector attached)
Cable Only (in 1-m increment s) R7A-CAZ001
Power Cables for Servomotors with B rakes
(connector attached)
Cable Only (in 1-m increment s) R7A-CAZ01B
1 m R7A-CPZ001S General-purpose Control Cables
2 m R7A-CPZ002S
3 m R7A-CAZ003S
5 m R7A-CAZ005S
10 m R7A-CAZ010S
3 m R7A-CAZ003B
5 m R7A-CAZ005B
10 m R7A-CAZ010B
Encoder Cables (for CN2)
Specifications Model
Encoder Cables (connector attached)
Cable Only (in 1-m increment s) R7A-CRZ001
3 m R7A-CRZ003C
5 m R7A-CRZ005C
10 m R7A-CRZ010C
Connectors
Specifications Model
Main Circuit Connector (CNA) with Ej ector Levers R7A-CNZ01P
Servomotor Connector (CNB) R7A-CNZ01A
Control Input Connector (CN1) R7A-CNA01R
Encoder Input Connector (CN2) R7A-CNZ01R
Servomotor Connector for E ncoder Cable R7A-CNZ02R
Servomotor Connector for S ervomotor Power Cable R7A-CNZ02A
Regeneration Resistance Unit
Specifications Model
Regeneration current: 8 A
Internal resistance: 50 Ω, 12 W
R88A-RG08UA
2-4
External Regeneration Resistor
Specifications Model
Regeneration capacity: 70 W, 47 Ω R88A-RR22047S
AC Reactors
Specifications Model
R7D-ZP01H R88A-PX5052
R7D-ZP02H R88A-PX5053
R7D-ZP04H R88A-PX5054
R7D-ZP08H R88A-PX5056
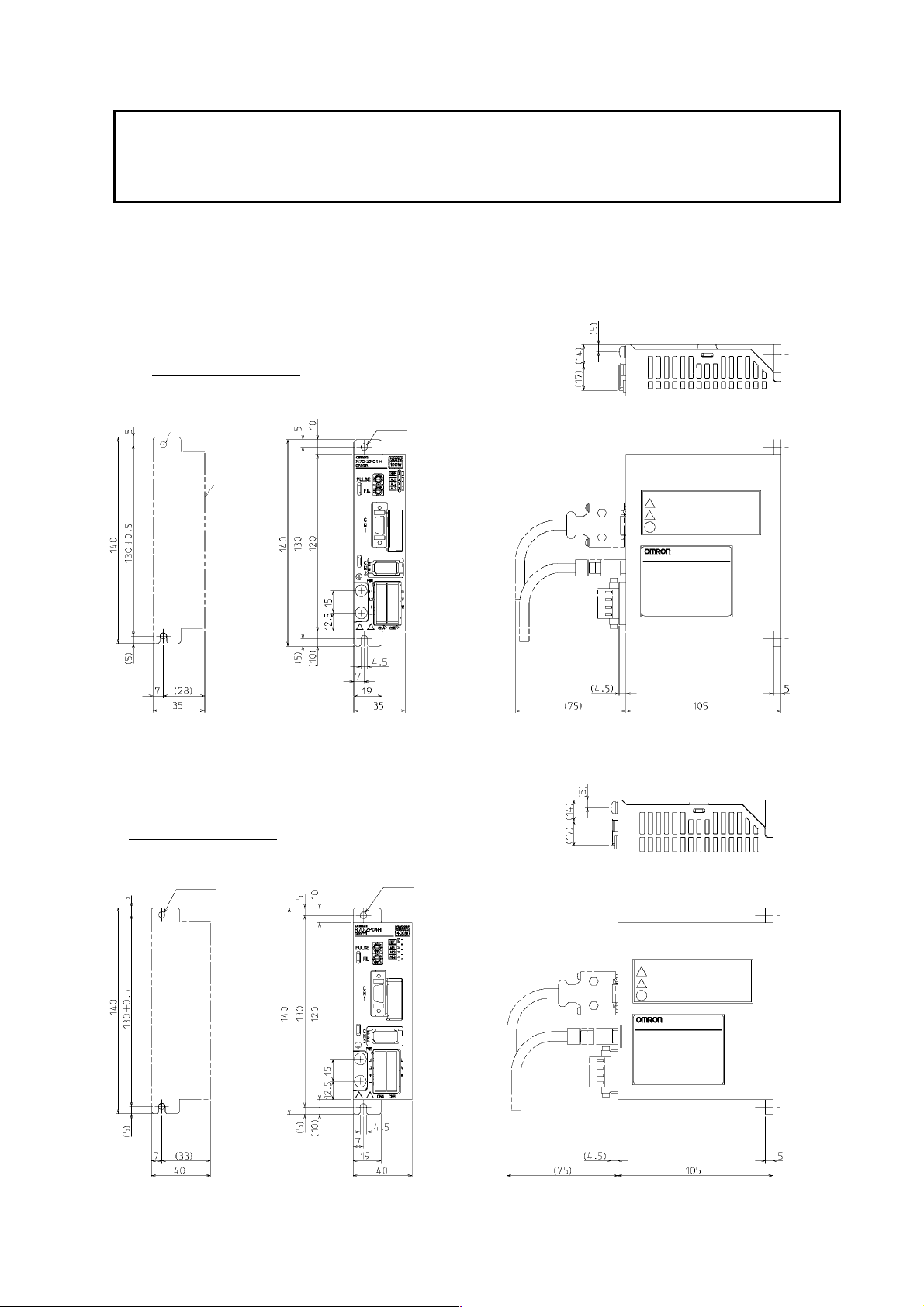
2-2 External and Mounted Dimensions
g
g
2-2 External and Mounted
Dimensions
2-2-1 Servo Drivers
R7D-ZP01H/-ZP02H (100 W/200 W)
Mounting Hole Dimensions
2-2-1 Servo Drivers
Two, M4 screw holes
Footprint
pitch
Mountin
R7D-ZP04H (400 W)
Mounting Hole Dimensions
4.5-dia. hole
Two, M4 screw holes
pitch
Mountin
4.5-dia. hole
2-5
 Loading...
Loading...