

Omron R7D-AP, R7M-A User Manual [es]

Advanced Industrial Automation
SmartStep Serie A
R7M-A_ (Servomotors)
R7D-AP_ (Servo Drivers)
Servomotors/Servodrivers
MANUAL DE USUARIO
Resumen
2 Modelos disponibles y especificaciones
3 Diseño e instalación del sistema
4 Operación
5 Detección y corrección de errores
Cat. No. I533-ES1-01
Gracias por elegir este producto SMARTSTEP serie A. Un uso apropiado del
producto garantizará un correcto rendimiento, aumentará la vida del mismo y
evitará posibles accidentes.
Lea atentamente este manual, y procure ser cuidadoso al utilizar el producto.
Después de leer este manual, manténgalo a mano para poder consultarlo.
NOTA
1.Este manual ofrece información sobre la instalación, el cableado, el ajuste de interruptores y la detección y corrección de problemas de los servomotores y servodrives
SMARTSTEP serie A. Para obtener información sobre los procedimientos de operación
reales del uso de un operador lógico, consulte el Manual de servicio de SMARTSTEP
serie A (I534).
2.Asegúrese de que este manual acompañe al producto al ser entregado al usuario final.
3.Aunque la documentación del producto se ha realizado cuidadosamente, si dispone de
alguna sugerencia sobre cómo mejorar este manual, póngase en contacto con su representante de OMRON.
4.Asuma que no es posible realizar ninguna acción que no aparezca descrita específicamente en este manual.
5.Sólo permita que el Servomotor o el Servodriver sea cableado, configurado u operado
(desde un Operador Digital) por un ingeniero eléctrico profesional o equivalente.
6.Recomendamos que añada los siguientes avisos a cualquier manual de instrucciones
que prepare para el sistema en el que se vaya a instalar el producto.
• Precauciones ante los peligros de los equipos de alta tensión.
• Precauciones al tocar los terminales del producto, incluso después de desconectar la
alimentación. (Estos terminales permanecen activos aunque esté desconectada la
alimentación).
7.Las especificaciones y funciones pueden cambiar sin previo aviso para mejorar las prestaciones del producto.
8.La rotación positiva y negativa de los Servomotores de c.a. descritos en este manual se
interpretan orientadas hacia el final del eje de salida del motor del siguiente modo: en el
sentido contrario al de las agujas del reloj es positivo y en el sentido de las agujas del reloj
es negativo.
9.No realice en el producto pruebas de resistencia a la tensión u otras pruebas mediante
un megámetro. Si lo hace, puede dañar los componentes internos.
10.Los Servomotores y Servodrivers tienen una vida útil limitada. Asegúrese de tener a
mano los recambios, así como de vigilar el entorno de trabajo y otras condiciones que
puedan afectar a dicha vida útil.
11.No establezca valores para ningún parámetro no descrito en este manual. Podrían ocurrir
errores de funcionamiento. Consulte a su representante OMRON si tiene alguna duda.
12.Consulte a su representante de OMRON antes de utilizar el producto en alguna situación
no contemplada en este manual o de emplearlo en sistemas de control nuclear, sistemas
ferroviarios, sistemas de aviación, vehículos, sistemas de combustión, equipos médicos,
máquinas recreativas, equipos de seguridad y otros sistemas, máquinas o equipos que
puedan tener una repercusión grave en vidas o propiedades en caso de uso incorrecto.

Elementos a comprobar antes de desembalar el producto
1.Compruebe los siguientes elementos antes de desembalar el producto:
• ¿Es correcto el producto entregado? (referente al número de modelo y especificaciones correctas)
• ¿Ha resultado dañado el producto durante el envío?
2.Compruebe que se hayan enviado los siguientes accesorios.
• Precauciones de seguridad
No se facilitan conectores o tornillos para montaje. Éstos deben adquirirse por separado.

Nota:
r
r
Los productos OMRON se fabrican para su uso conforme a procedimientos adecuados, por un operador cualificado, y sólo para el fin descrito en este manual.
Las convenciones que aparecen a continuación se utilizan para indicar y clasificar las precauciones
indicadas en el presente manual. Preste atención siempre a la información que aparece en ellas. Su
incumplimiento podría conllevar lesiones físicas o daños materiales.
! PELIGRO Indica una situación de peligro inmediato que, de no evitarse, puede ocasio-
nar la muerte o lesiones graves.
! ADVERTENCIA Indica una situación de peligro potencial que, de no evitarse, puede ocasio-
nar la muerte o lesiones graves.
! Precaució n Indica una situación de peligro potencial que, de no evitarse, puede ocasionar
lesiones físicas o daños materiales menores.
Referencias de productos OMRON
Todos los productos OMRON aparecen en mayúsculas en este manual. La palabra "Unidad" también
está en mayúsculas cuando hace referencia a un producto OMRON, independientemente de si aparece o no en el nombre concreto del producto.
La abreviatura “Ch”, que aparece en algunos displays y en algunos productos OMRON, significa normalmente “palabra”, que también se abrevia como “Wd” en la documentación.
La abreviatura "PC" (Programmable Controller) se refiere a autómata programable y no se utiliza
como abreviación de ningún otro elemento.
Ayudas visuales
En la columna izquierda del manual aparecen los siguientes encabezados para ayudar en la localización
de los diferentes tipos de información.
Nota Indica información de interés especial para un eficaz y adecuado funcionamiento del producto.
OMRON, 2001
Reservados todos los derechos. Se prohíbe la reproducción, almacenamiento en sistemas de recuperación o transmisión total o
parcial, por cualquier forma o medio (mecánico, electrónico, fotocopiado, grabación u otros) sin la previa autorización po
escrito de OMRON.
No se asume responsabilidad alguna con respecto al uso de la información contenida en el presente manual. Asimismo, dado que
OMRON mantiene una política de constante mejora de sus productos de alta calidad, la información contenida en el presente
manual está sujeta a modificaciones sin previo aviso. En la preparación de este manual se han adoptado todas las precauciones
posibles. No obstante, OMRON no se hace responsable de ningún error u omisión. Tampoco asume responsabilidad alguna po
los posibles daños resultantes de la utilización de la información contenida en el presente documento.

Advertencias generales
Siga las siguientes advertencias cuando utilice los Servomotores y Servodrivers SMARTSTEP y los
dispositivos periféricos conectados a ellos.
Este manual puede incluir ilustraciones del producto con las tapas protectoras quitadas con objeto de
describir en detalle los componentes del producto. Asegurarse de que las tapas protectoras se pongan en su lugar antes de utilizar el producto.
Consulte a su representante OMRON cuando vaya a utilizar el producto tras un largo período de
almacenaje
! ADVERTENCIA Conecte siempre los terminales de tierra del Servodriver y el Servomotor a una
tierra de clase -3 (de 100 Ω o menos). El no conectar a una tierra clase -3 puede
provocar descargas eléctricas.
! ADVERTENCIA No toque el interior del Servodriver. Hacerlo puede provocar una descarga
eléctrica.
! ADVERTENCIA No retire la tapa frontal, tapas de los terminales, cables o elementos opcionales
mientras esté conectada la alimentación. Hacerlo puede provocar una descarga
eléctrica.
! ADVERTENCIA La instalación, funcionamiento, mantenimiento o inspección debe llevarse a cabo
por personal autorizado. De lo contrario podrían producirse descargas eléctricas
o lesiones.
! ADVERTENCIA El cableado y las inspecciones deben realizarse al menos cinco minutos des-
pués de desconectar la alimentación. Hacerlo puede provocar una descarga
eléctrica.
! ADVERTENCIA Evite que se produzcan daños, presiones o fuerzas excesivas o se coloquen
objetos pesados en los cables. Hacerlo puede provocar una descarga eléctrica.
! ADVERTENCIA No toque las partes giratorias del Servomotor cuando esté en funcionamiento.
De hacerlo, podrían producirse lesiones personales.
! ADVERTENCIA No modifique el producto. De hacerlo podría provocar daños en el mismo o lesio-
nes personales.
! ADVERTENCIA Incorpore a la máquina un dispositivo de parada para garantizar la seguridad. El
freno de sujeción no está diseñado como un dispositivo de parada para propósitos de seguridad.
! ADVERTENCIA Provéase de un dispositivo externo de parada de emergencia que pueda detener
el funcionamiento e interrumpir la alimentación eléctrica de inmediato. De no
hacerlo así podrían producirse daños.

! ADVERTENCIA No acercarse a la máquina inmediatamente después de una interrupción
momentánea de la alimentación eléctrica para evitar un rearranque repentino.
(adopte las medidas adecuadas para restablecer la seguridad contra un reinicio
inesperado). De hacerlo, podrían producirse lesiones personales.
! Precaució n Utilice los Servomotores y Servodrivers combinados correctamente. Si utiliza una
combinación incorrecta podrían producirse incendios o daños en los productos.
! Precaució n No almacene o instale el producto en los lugares que se indican a continuación.
Si lo hace podría provocar incendios, descargas eléctricas o daños en los productos.
• Lugares expuestos a la luz directa del sol.
• Posiciones expuestas a temperaturas o condiciones de humedad inferiores
o superiores a las indicadas en las especificaciones.
• Lugares expuestos a condensación como resultado de cambios drásticos de
temperatura.
• Sitios expuestos a gases corrosivos o inflamables.
• Lugares con gran cantidad de polvo (especialmente ferrosos) o sales.
• Lugares expuestos a golpes o vibraciones.
• Lugares expuestos al contacto con agua, aceite o productos químicos.
! Precaució n No toque el radiador del Servodriver, el Servomotor de resistencia de regenera-
ción o el Servomotor mientras esté conectada la alimentación o justo después de
desconectarla. El hacerlo puede ocasionar quemaduras en la piel debido a que la
superficie estará caliente.
Precauciones de almacenamiento y transporte
! Precaució n No agarre el producto por los cables o por el eje del motor al transportarlo. Si lo
hace podría provocar lesiones personales o un funcionamiento incorrecto de la
máquina.
! Precaució n No coloque ninguna carga que supere la especificada para el producto. Si lo
hace podría provocar lesiones personales o un funcionamiento incorrecto de la
máquina.

Precauciones de instalación y cableado
! Precaució n No pise o coloque objetos pesados sobre el producto. De hacerlo, podrían produ-
cirse lesiones personales.
! Precaució n No cubra los puertos de entrada y salida, y evite que se introduzcan cuerpos
extraños en el producto. Pueden provocarse incendios.
! Precaució n Asegúrese de instalar el producto en la dirección adecuada. De no hacerlo,
puede producirse un funcionamiento incorrecto.
! Precaució n Disponga la distancia especificada entre el Servodriver y el panel de control u
otros dispositivos. De no hacerlo, podrían producirse incendios o un funcionamiento incorrecto.
! Precaució n Evite los golpes. De lo contrario, podría provocar un funcionamiento incorrecto.
! Precaució n Asegúrese de realizar el cableado de forma correcta y segura. Si no lo hace,
podría provocar un exceso de velocidad del motor, lesiones o un funcionamiento
incorrecto.
! Precaució n Asegúrese de que todos los tornillos de montaje, de terminal y del conector están
apretados al par especificado en los manuales correspondientes. El uso de un
par inapropiado puede provocar un funcionamiento incorrecto.
! Precaució n Utilice terminales de crimpar para el cableado. No conecte cables trenzados
pelados directamente a los terminales. La conexión de cables trenzados pelados
puede provocar un incendio.
! Precaució n Utilice siempre las tensiones de alimentación indicadas en el manual de usuario.
Una tensión incorrecta puede provocar un funcionamiento incorrecto o incendio.
! Precaució n Tome las medidas apropiadas para garantizar que se suministra la alimentación
con la tensión y frecuencia nominal especificada. Tenga especial cuidado en
lugares en los que la alimentación eléctrica sea inestable. Una alimentación
inapropiada puede provocar un funcionamiento incorrecto.
! Precaució n Instale disyuntores externos y tome otras medidas de seguridad frente a cortocir-
cuitos en cableados externos. En caso de que no se tomen las suficientes medidas de seguridad para prevenir cortocircuitos, puede producirse un incendio.
! Precaució n En el momento de realizar instalaciones en los siguientes lugares, tome las sufi-
cientes medidas de seguridad. El no tomar estas precauciones puede ocasionar
daños al producto.
• Posiciones expuestas a electricidad estática u otras formas de ruido.
• Lugares sujetos a fuertes campos magnéticos y electromagnéticos.
• Posiciones con posibilidad de quedar expuestas a radioactividad.
• Lugares próximos a fuentes de alimentación eléctrica.

Precauciones de funcionamiento y ajuste
! Precaució n Confirme que no se producirá ningún efecto adverso en el sistema antes de reali-
zar la operación de prueba. El no hacerlo puede causar daños al equipo.
! Precaució n Compruebe que los parámetros e interruptores recién ajustados funcionen
correctamente antes de ejecutarlos. El no hacerlo puede causar daños al equipo.
! Precaució n No realizar ningún ajuste extremo. El hacerlo podría provocar un funcionamiento
inestable y daños en el equipo.
! Precaució n Separar el servomotor de la máquina, comprobar el funcionamiento adecuado y
conectar entonces la máquina. El no hacerlo así podría causar daños.
! Precaució n Cuando aparezca una alarma, eliminar su causa, reponer la alarma tras confir-
mar la seguridad y restablecer el funcionamiento. De no hacerlo así podrían producirse daños.
! Precaució n No use el freno incorporado del Servomotor como freno normal. De lo contrario,
podría provocar un funcionamiento incorrecto.
Precauciones en inspecciones y mantenimiento
! ADVERTENCIA No intente desarmar, reparar o modificar ninguna Unidad. Cualquier intento de
hacerlo puede provocar desperfectos, descargas eléctricas e incluso incendios.
! Precaució n Reanude el funcionamiento sólo cuando haya transferido a la nueva Unidad todo
el contenido de los datos necesarios para el funcionamiento. En caso de no
hacerlo, puede producirse un funcionamiento imprevisto.
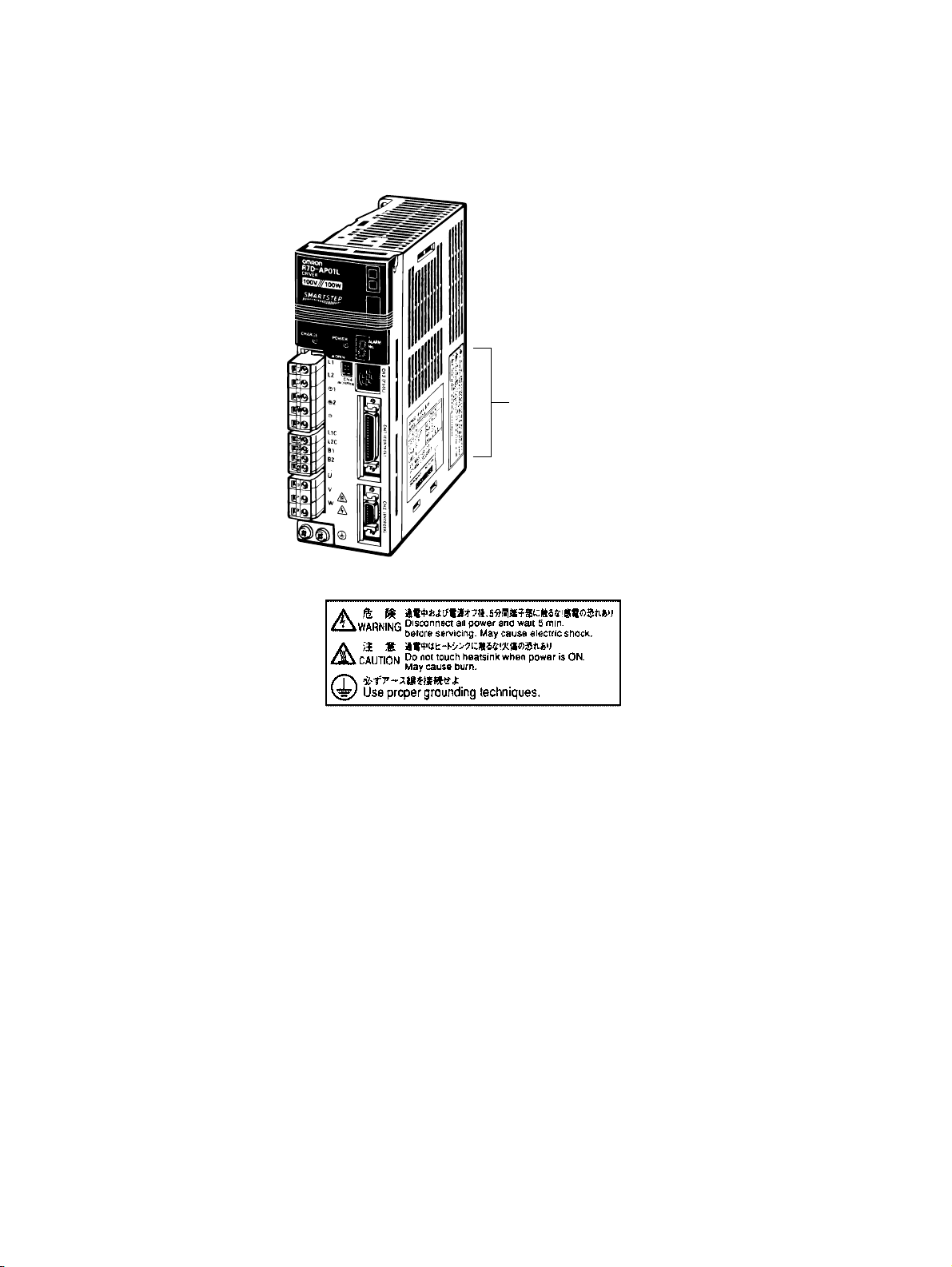
Etiquetas de advertencia
Las etiquetas de advertencia están pegadas en el producto, como muestra la ilustración siguiente.
Siga cuidadosamente las instrucciones que en ellas se contienen.
Ejemplo de modelo R7D-AP01L
Etiqueta de advertencia
Ejemplo de modelo R7D-AP01L
Índice
Capítulo 1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1-1 Prestaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-2 Configuración del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
1-3 Nomenclatura del Servodriver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
1-4 Normas aplicables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1-5 Diagramas de bloque del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Capítulo 2. Modelos disponibles y especificaciones . . . . . . . . . . . . . 2-1
2-1 Modelos disponibles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-2 Dimensiones externas y una vez montado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2-3 Especificaciones del Servodriver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
2-4 Especificaciones del Servomotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-30
2-5 Especificaciones de engranaje reductor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-38
2-6 Especificaciones de cables y conectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-42
2-7 Interfazces pasivas y especificaciones de cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-52
2-8 Especificaciones del Operador Digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-83
2-9 Especificaciones de Resistencia de Regeneración Externa . . . . . . . . . . . . . . . . . . . . . . . . . . 2-85
2-10 Reactancias de c.c. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-86
Capítulo 3. Diseño e instalación del sistema . . . . . . . . . . . . . . . . . . . 3-1
3-1 Condiciones de instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3-2 Cableado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
3-3 Absorción de energía regenerativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-36
Capítulo 4. Operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4-1 Procedimiento de puesta en marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4-2 Selecciones de interruptor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4-3 Preparación para la puesta en marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4-4 Operación de prueba. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
4-5 Ajustes de ganancia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
4-6 Parámetros de usuario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4-7 Funciones de operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-26
Capítulo 5. Detección y corrección de errores. . . . . . . . . . . . . . . . . . 5-1
5-1 Medidas para la prevención de errores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5-2 Alarmas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
5-3 Detección y corrección de errores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
5-4 Características de sobrecarga (características termoelectrónicas) . . . . . . . . . . . . . . . . . . . . . 5-15
5-5 Mantenimiento periódico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
Capítulo 6. Apéndice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6-1 Ejemplos de conexión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Histórico de revisiones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . R-1

Capítulo 1
Introducción
1-1 Prestaciones
1-2 Configuración del sistema
1-3 Nomenclatura del Servodriver
1-4 Normas aplicables
1-5 Diagramas de bloque del sistema

Introducción
Capítulo 1
1-1 Prestaciones
Los Servomotores y Servodrivers SMARTSTEP serie A han sido desarrollados como Controladores
de Posición del tipo entrada de tren de impulsos para sustituir a los motores paso a paso en sistemas de posicionamiento simple. Los Servomotores y Servodrivers SMARTSTEP combinan la facilidad de uso de los motores paso a paso con un posicionamiento más rápido, gracias a una alta
velocidad, un par elevado, así como a una alta fiabilidad sin perder precisión de posicionamiento
incluso durante cambios repentinos de carga y otras características avanzadas.
■ Respuesta más rápida y mayor velocidad de rotación
Los Servomotores y Servodrivers SMARTSTEP serie A incorporan las mismas características de
alta velocidad y par elevado que no pueden alcanzarse con motores paso a paso, como el OMNUC
serie W. Los Servomotores SMARTSTEP serie A ofrecen velocidades de rotación más altas de
hasta 4.500 rpm, con posibilidad de operación constante a esta velocidad. Un par de salida más alto
de hasta 1 s puede ofrecer salidas de hasta aproximadamente un 300% del par nominal, brindando
un posicionamiento de carrera intermedia y larga aún más rápida.
■ Precisión constante
La gama de productos de serie A con una alta resolución de encoder de 2.000 impulsos/rotación
brinda un control de realimentación permitiendo una operación continua sin pérdida de precisión de
posicionamiento, incluso en el caso de cambios de carga repentinos o de una aceleración o deceleración súbita.
■ Configuración mínima con interruptores del panel frontal del
Servodriver
Los productos SMARTSTEP serie A pueden operarse inmediatamente sin necesidad de invertir
mucho tiempo en la configuración de parámetros. Los interruptores del panel frontal del Servodriver
serie A permiten una modificación fácil de las configuraciones de funciones o de la resolución de
posicionamiento.
● Configuración de resolución
La resolución de los Servomotores SMARTSTEP serie A puede seleccionarse a partir de los siguientes cuatro niveles:
500 impulsos/rotación (0,72° /paso); 1.000 impulsos/rotación (0,36° /paso) (selección por defecto);
5.000 impulsos/rotación (0,072° /paso); o 10.000 impulsos/rotación (0,036° /paso)
● Configuración de entrada de impulso de comando
La configuración de entrada de impulso de comando de SMARTSTEP serie A puede conmutarse
entre métodos de CW/CCW (2 impulsos) y SIGN/PULS (impulso simple) para una adaptación
rápida a las especificaciones de salida del Controlador de Posición.
● Configuración del freno dinámico
En los Servomotores SMARTSTEP serie A puede forzarse una desaceleración hasta parar en
RUN OFF o cuando ocurre una alarma.
1-2
Introducción
● Configuración de ganancia
Un interruptor rotativo especial incorporado en los Servodrivers SMARTSTEP serie A permite
efectuar una configuración de ganancia sencilla. El autoajuste (autotuning) online también puede
activarse mediante el accionamiento de un interruptor y la capacidad de respuesta puede
adaptarse fácilmente a la máquina que ha de ser utilizada.
Nota La utilización de un Operador Digital o de un ordenador personal permite una operación
con configuración de parámetros.
■ Servomotores de tipo cilíndrico y de tipo plano
Los productos de SMARTSTEP serie A ofrecen Servomotores tipo cilíndrico embridado con un área
de montaje más pequeña, así como Servomotores de tipo plano con una longitud total inferior. Las
dimensiones de profundidad del Servomotor plano son similares a las dimensiones de los motores
paso a paso con la misma capacidad de salida. Los Servomotores pueden seleccionarse según el
tamaño, ofreciendo la posibilidad de un equipo más compacto.
■ Selección más amplia de dispositivos de programación
Se encuentran a disposición Operadores Digitales SMARTSTEP serie A especiales, así como software de monitorización de ordenadores personales. El software especial de monitorización permite
realizar configuraciones de parámetros, monitorización de velocidad y corriente, visualización de la
forma de onda de corriente y de velocidad, supervisión de E/S, autoajustes (autotuning), operación
jog y otras operaciones desde un ordenador. También es posible llevar a cabo comunicaciones de
eje múltiple que fijen las operaciones de monitorización y parámetros para varios Servodrivers. Para
obtener más detalles consulte el software de monitorización de ordenadores personales para Servo-
drivers (CD-ROM) para Windows 95/98, versión 2.0 (WMON Win Ver.2.0) (Núm. catál.: SBCE-011).
Capítulo 1
1-3
Introducción
DRIVER PR
PR DRIVER
B.B
INP
VCMP
TGON
REF
POWER
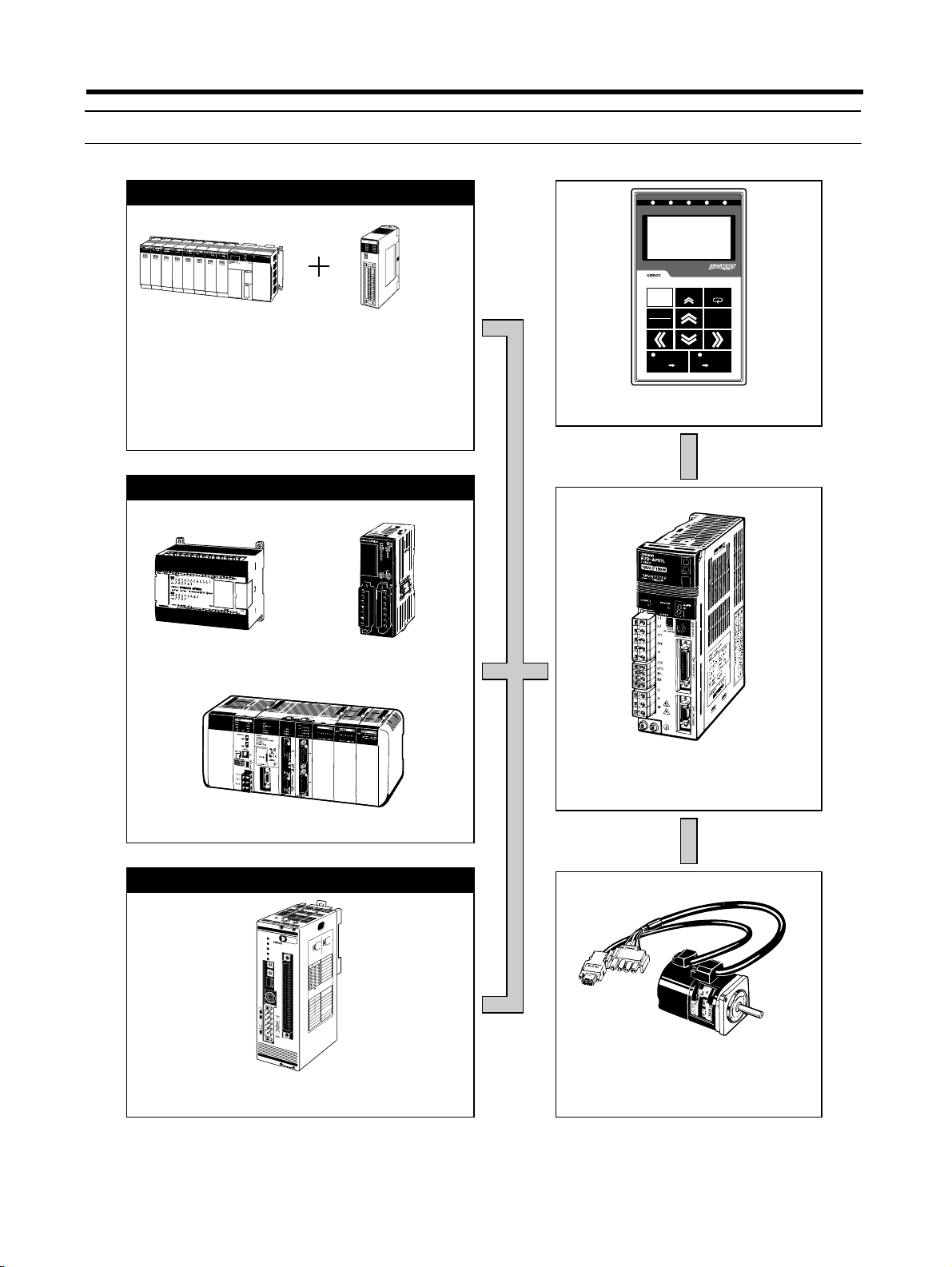
1-2 Configuración del sistema
SYSMAC + Unidad Control Posición con salida de tren de impulsos
NC413
RUN
X
ERROR
Y
SENS
Z
DATA
U
MACHINE
No.
CN1 CN2
B2
4
A
24
B
1
A
1
Autómata Programable
SYSMAC CJ/CS/C/CV
Autómatas Programables SYSMAC con salidas de impulso
Unidades de Control de Posición
CJ1W-NC113/213/413
CJ1W-NC133/233/433
CS1W-NC113/213/413
CS1W-NC133/233/433
C200HW-NC113/213/413
C500-NC113/211
Tren de
impulsos
Capítulo 1
B.B
INP
TGON
REF
SCROLL MODE/SET
DATA
WRITE
PR DRIVER
POWER
VCMP
R7A–PR02A PARAMETER UNIT
RESET
JOG
RUN
Operador Digital (portátil)
R7A-PR02A
READ
DRIVER PR
SYSMAC CPM2A
P
A
20
3
POWER
SYSMAC CPM2C
/
SYSMAC CQM1H
Posicionador de eje simple con salida de tren de impulso
MS
NS
3F88M
M0
1 AXIS POSITIONER
M1
M2
3
2
4
1
5
0
NA
6
9
7
8
×10
3
2
4
1
5
0
6
9
7
8
×
1
123
ON↓
DR0
DR1
L/R
3F88M-DRT141 Posicionador
de eje simple para DeviceNet
OPEN
No.
OPEN
LINE
-
DRT141
LINE
CCW CW
ALARM
LS
M2
M1
SOFT LIMIT
M0
ORG SRH NG
ENCODER ALM
STOP
LM
A
ER
IV
R
D
OTHER
: )
D
E
(R
COMMUNICATION
SPEED
H
C
IT
125kbps
W
1
S
R
IP
D
250kbps
FF
0D
O
R
D
500kbps
F
F
E
−
F
O
T
F
O
O
M
E
N
O
/R
L
ON
A
C
O
L
ON
OFF
ITCH
ON
REMOTE MODE
DIP SW
LOCAL MODE
L/R
OFF
ON
I/O
SMARTSTEP serie A
R7D-AP@ Servodriver
SMARTSTEP serie A
R7M-A@ Servomotor
1-4
Introducción
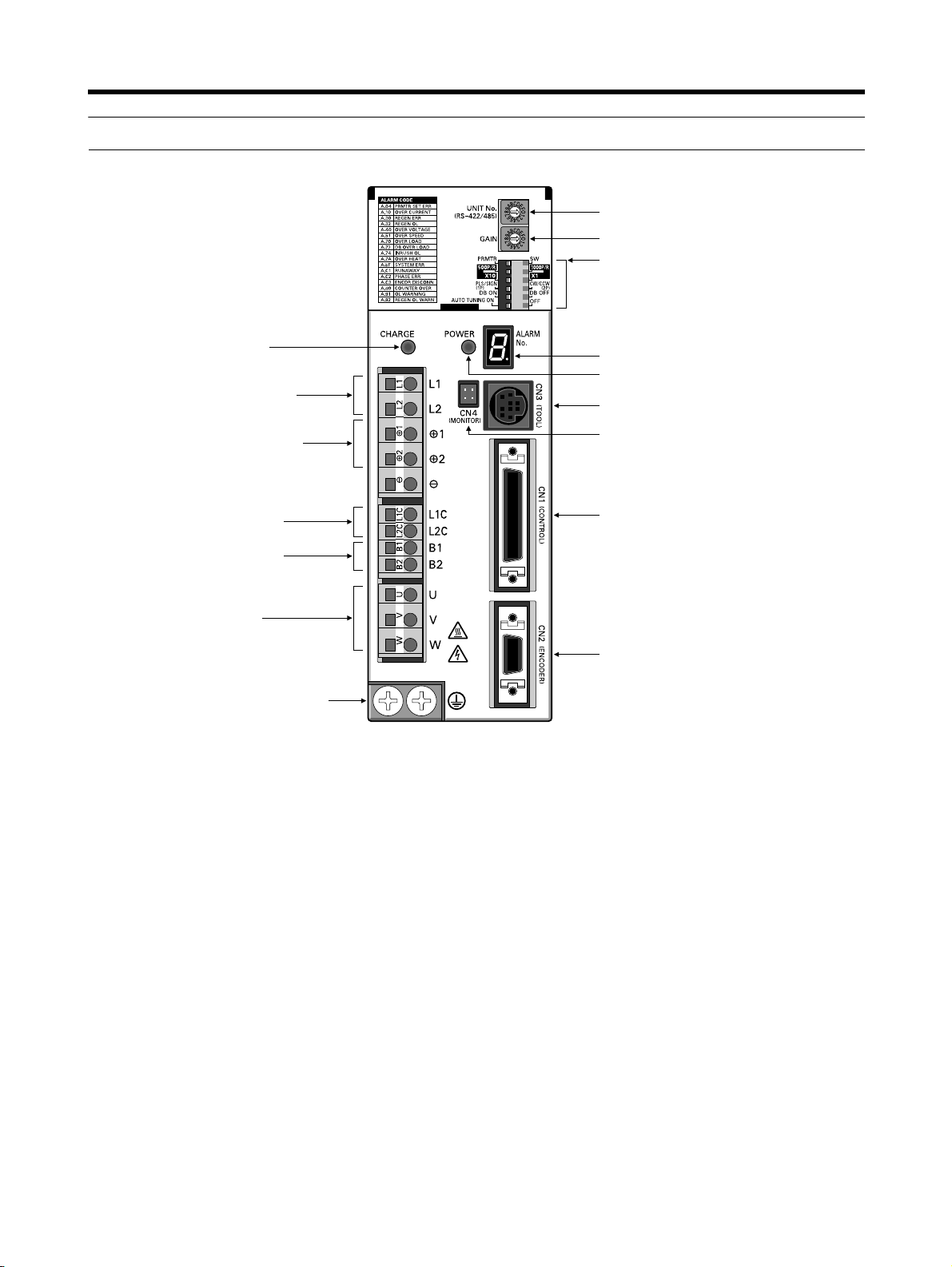
1-3 Nomenclatura del Servodriver
Indicador de fuente de
alimentación del circuito principal
Terminales de entrada de fuente de
alimentación del circuito principal
Capítulo 1
Interruptor rotativo para selección de núm. de unidad
Interruptor rotativo para ajuste de ganancia
Interruptores de selección de función:
• Interruptor de habilitación de configuración de
interruptor/parámetro
• Configuración de resolución
• Configuración de entrada de impulsos de
comando
• Configuración del freno dinámico
• Interruptor de autoajuste (autotuning) online
Display de alarmas
Indicador de fuente de alimentación del
circuito de control
Conector de comunicaciones (CN3)
Terminales de conexión
del reactancia de c.c.
Terminales de entrada de fuente de
alimentación del circuito de control
Terminales de resistencia de
regeneración externa
Terminales de alimentación del
Servomotor
Terminales de FG (terminal de tierra) para
fuente de alimentación y alimentación del
Servomotor
Conector de salida del monitor (CN4)
Conector de E/S de control (CN1)
Conector de entrada del encoder (CN2)
1-5
Introducción
Capítulo 1
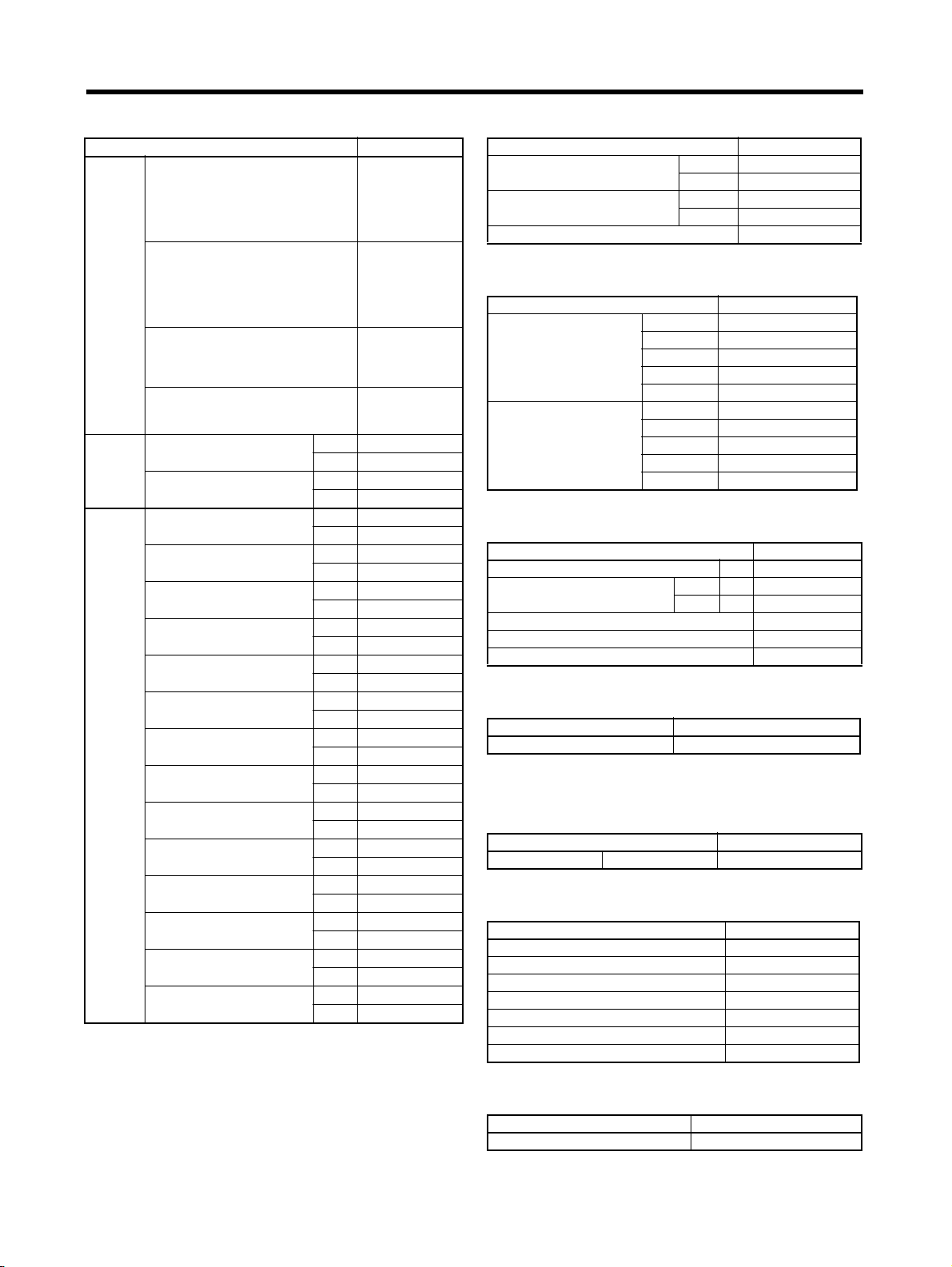
1-4 Normas aplicables
■ Directivas CE
Directivas CE Producto Normas aplicables Observaciones
Directivas
sobre baja
tensión
Directivas
sobre CEM
Nota Es necesario efectuar una instalación bajo las condiciones estipuladas en 3-2-5 CEM-cableado
compatible para asegurar el cumplimiento de las directivas CEM.
Servodrivers de c.a. EN50178 Especificaciones de seguridad para
aparatos eléctricos de medida, control e instalaciones de investigación
Servomotores de c.a. IEC60034-1, -5, -8, -9
EN60034-1, -9
Servodrivers y Servomotores de c.a.
EN55011 clase A grupo 1 Interferencia inalámbrica y métodos
EN61000-6-2 Normas relativas a la compatibilidad
Equipo eléctrico rotativo
de medición de los dispositivos de
radio frecuencia para aplicaciones
industriales, científicas y médicas
e inmunidad electromagnética para
entornos industriales
■ Normas UL y cUL
Normas Producto Normas aplicables Nº de
archivo
UL Servodrivers de c.a. UL508C E179149 Dispositivos de conversión de
energía
Servomotores de c.a. UL1004 E179189 Motores eléctricos
cUL Servodrivers de c.a. cUL C22.2 No 14 E179149 Dispositivos de control indus-
trial
Servomotores de c.a. cUL C22.2 No 100 E179189 Motores y generadores
Observaciones
1-6

Introducción
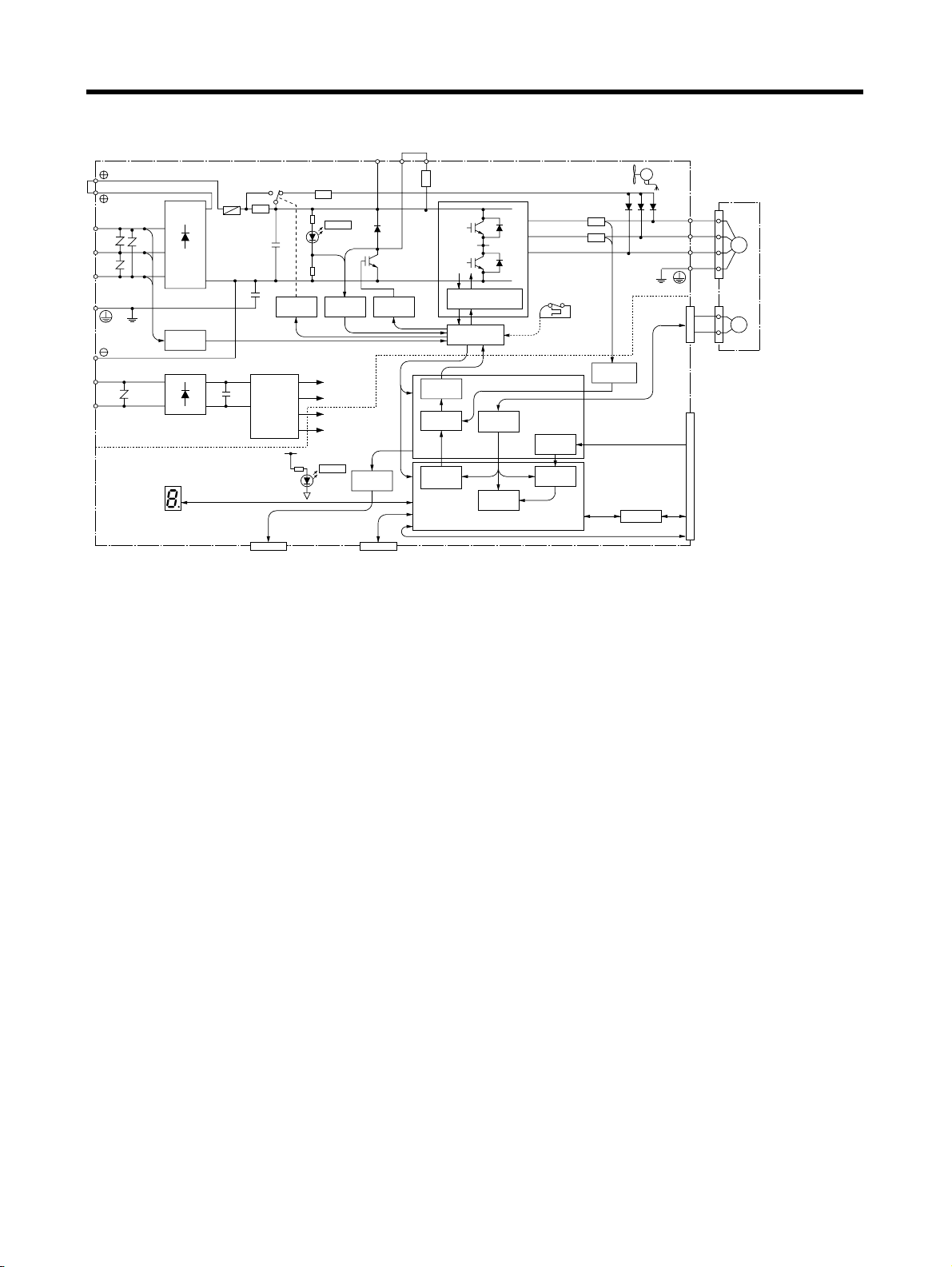
1-5 Diagramas de bloque del sistema
■ 200 Vc.a.: R7D-APA3H/-APA5H/-AP01H/-AP02H/-AP04H
100 Vc.a.: R7D-APA3L/-APA5L/-AP01L/-AP02L/-AP04L
Servodriver de c.a.
B1
1
2
Fusible
L1
L2
P1
R
T
CARGA
+
−
N1
Detección
Control
de tensión
de relé
Detección
de tensión
L1C
L2C
+
∼
∼
+
Conversión
−
−
de c.c./c.c.
±5 V
+16,5 V
+5 V
±15 V
+5 V
POTENCIA
Conversión
0 V
Áreas de display/configuración
CN4
Salida de monitorización
analógica
B2
(ver nota).
Control
de puerta
de tensión
analógica
CN3
Operador Digital/
ordenador
P2
N2
Protección contra
sobrecorriente del
Generación
de MID
Amplificador
de corriente
digital
Procesamiento
de comandos
de corriente
Puerto serie
control de puerta
Interfaz
Procesamiento
de señal
de encoder
Control de
velocidad
U
V
W
CN2
Detección
de corriente
ASIC
CN1
Procesamiento
de impulsos
de comando
Control de
posición
CPU
E/S
Nota Sólo en R7D-AP04H/AP04L.
U
V
W
Capítulo 1
Servomotor c.a.
M
E
Entrada
de impulsos
de comando
E/S de control
RS422
1-7
Introducción
■ 200 Vc.a.: R7D-AP08H
Servodriver de c.a.
1
2
L1
L2
L3
L1C
L2C
Áreas de display/configuración
R
S
T
Detección
de tensión
∼
P
Fusible
CARGA
+
−
N
Detección
Control
de tensión
de relé
+∼
+
Conversión
−
−
de c.c./c.c.
±5 V
+16,5 V
+5 V
±15 V
+5 V
POTENCIA
0 V
CN4
Salida de monitorización
analógica
B1
Control
de puerta
Conversión
de tensión
analógica
CN3
Operador Digital/
ordenador
B2
Generación
de MID
Amplificador
de corriente
Procesamiento
de comandos
de corriente
Puerto serie
B3
P
N
digital
Protección contra
sobrecorriente del
control de puerta
Interfaz
Procesamiento
de señal
de encoder
Control de
velocidad
U
V
W
ASIC
Procesamiento
de impulsos
de comando
Control de
posición
CPU
Termistor
Detección
de corriente
E/S
VENTILADOR
±12 V
U
V
W
CN2
CN1
E/S de control
RS422
Capítulo 1
Servomotor c.a.
M
E
Entrada
de impulsos
de comando
1-8
Capítulo 2
Modelos disponibles y especificaciones
2-1 Modelos disponibles
2-2 Dimensiones externas y una vez montado
2-3 Especificaciones del Servodriver
2-4 Especificaciones del Servomotor
2-5 Especificaciones de engranaje reductor
2-6 Especificaciones de cables y conectores
2-7 Interfazces pasivas y especificaciones de cables
2-8 Especificaciones del Operador Digital
2-9 Especificaciones de Resistencia de Regeneración
Externa
2-10 Reactancias de c.c.
Modelos disponibles y especificaciones
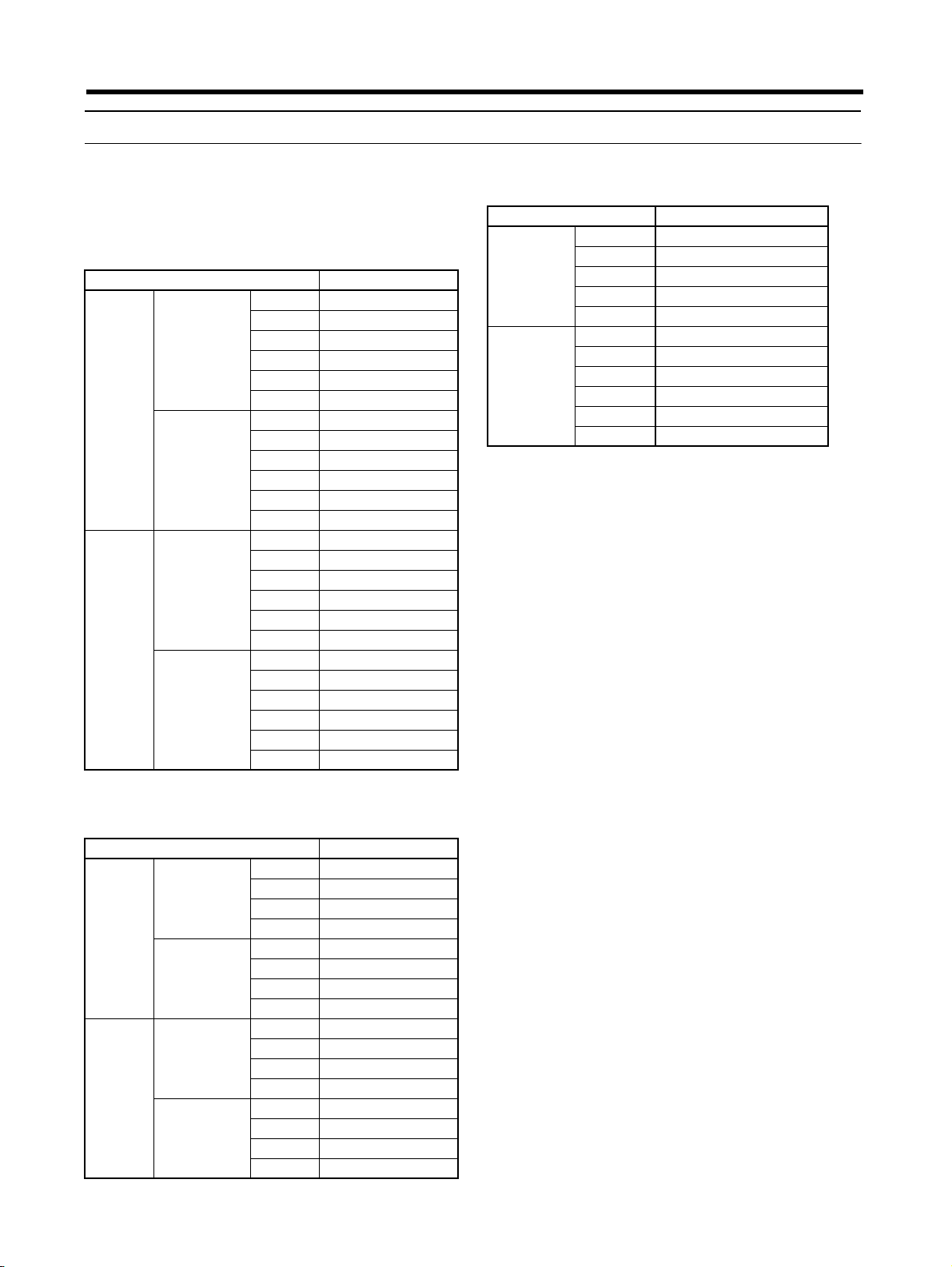
2-1 Modelos disponibles
Capítulo 2
■ Servomotores
● Servomotores de tipo cilíndrico de
3.000 rpm
Especificaciones Modelo
Sin freno Eje recto sin
Con freno Eje recto sin
chaveta
Eje recto con
chaveta
chaveta
Eje recto con
chaveta
30 W R7M-A03030
50 W R7M-A05030
100 W R7M-A10030
200 W R7M-A20030
400 W R7M-A40030
750 W R7M-A75030
30 W R7M-A03030-S1
50 W R7M-A05030-S1
100 W R7M-A10030-S1
200 W R7M-A20030-S1
400 W R7M-A40030-S1
750 W R7M-A75030-S1
30 W R7M-A03030-B
50 W R7M-A05030-B
100 W R7M-A10030-B
200 W R7M-A20030-B
400 W R7M-A40030-B
750 W R7M-A75030-B
30 W R7M-A03030-BS1
50 W R7M-A05030-BS1
100 W R7M-A10030-BS1
200 W R7M-A20030-BS1
400 W R7M-A40030-BS1
750 W R7M-A75030-BS1
■ Servodrivers
Especificaciones Modelo
Monofásico
de 100 Vc.a.
Monofásico
de 200 Vc.a.
30 W R7D-APA3L
50 W R7D-APA5L
100 W R7D-AP01L
200 W R7D-AP02L
400 W R7D-AP04L
30 W R7D-APA3H
50 W R7D-APA5H
100 W R7D-AP01H
200 W R7D-AP02H
400 W R7D-AP04H
750 W R7D-AP08H
● Servomotores de tipo plano de
3.000 rpm
Especificaciones Modelo
Sin freno Eje recto sin
Con freno Eje recto sin
chaveta
Eje recto con
chaveta
chaveta
Eje recto con
chaveta
100 W R7M-AP10030
200 W R7M-AP20030
400 W R7M-AP40030
750 W R7M-AP75030
100 W R7M-AP10030-S1
200 W R7M-AP20030-S1
400 W R7M-AP40030-S1
750 W R7M-AP75030-S1
100 W R7M-AP10030-B
200 W R7M-AP20030-B
400 W R7M-AP40030-B
750 W R7M-AP75030-B
100 W R7M-AP10030-BS1
200 W R7M-AP20030-BS1
400 W R7M-AP40030-BS1
750 W R7M-AP75030-BS1
2-2
Modelos disponibles y especificaciones
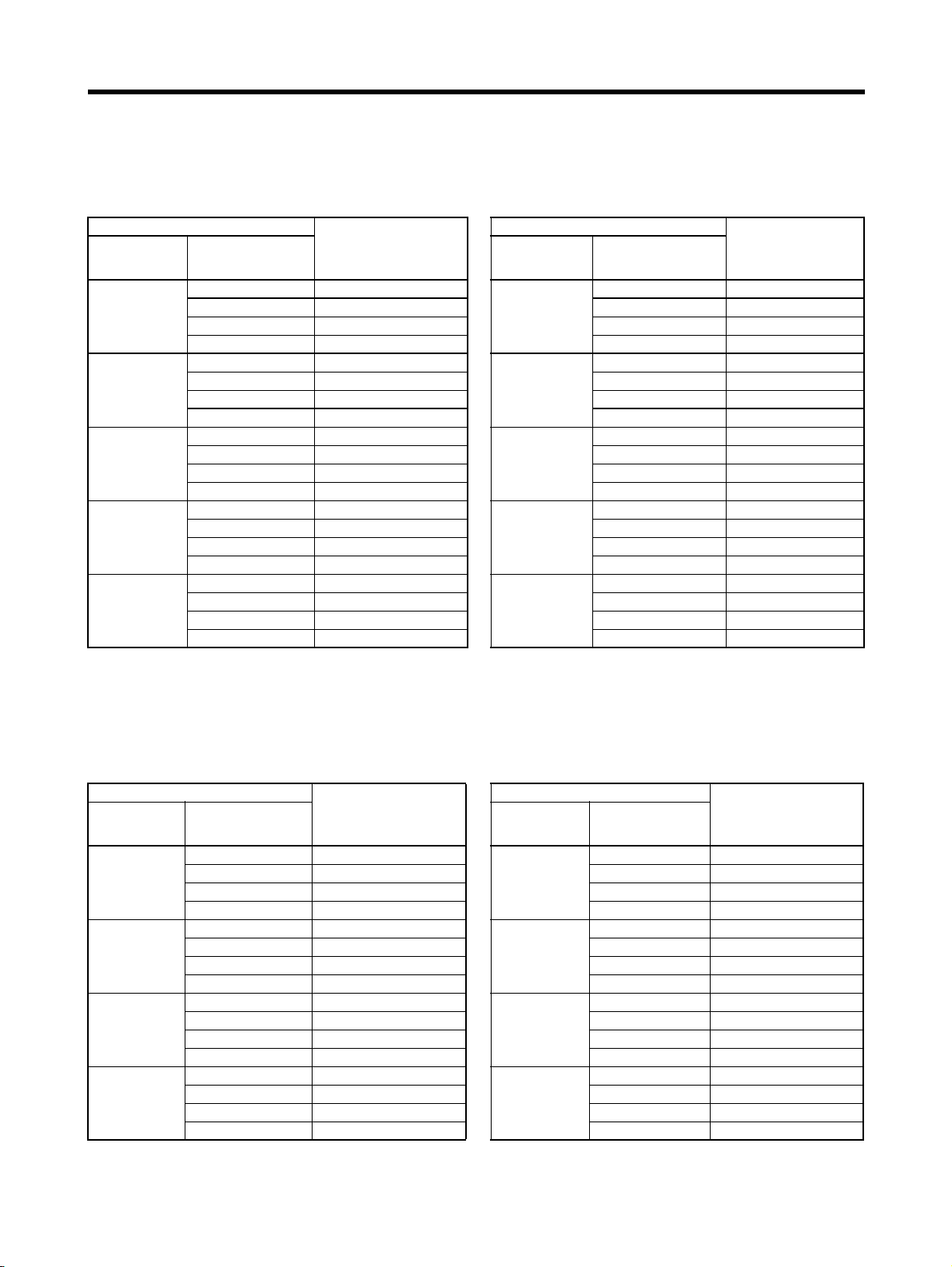
■ Engranajes reductores (eje recto con chaveta)
Capítulo 2
● Para Servomotores tipo cilíndrico
(holgura = 3′ Máx.)
Especificaciones Modelo
Capacidad del
Servomotor
50 W 1/5 R7G-VRSFPB05B50
100 W 1/5 R7G-VRSFPB05B100
200 W 1/5 R7G-VRSFPB05B200
400 W 1/5 R7G-VRSFPB05C400
750 W 1/5 R7G-VRSFPB05C750
Engranajes
reductores (índice
de deceleración)
1/9 R7G-VRSFPB09B50
1/15 R7G-VRSFPB15B50
1/25 R7G-VRSFPB25B50
1/9 R7G-VRSFPB09B100
1/15 R7G-VRSFPB15B100
1/25 R7G-VRSFPB25B100
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB15C400
1/25 R7G-VRSFPB25C200
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB15C400
1/25 R7G-VRSFPB25D400
1/9 R7G-VRSFPB09D750
1/15 R7G-VRSFPB15D750
1/25 R7G-VRSFPB25E750
● Para Servomotores tipo cilíndrico
(holgura = 45′ Máx.)
Especificaciones Modelo
Capacidad del
Servomotor
50 W 1/5 R7G-RGSF05B50
100 W 1/5 R7G-RGSF05B100
200 W 1/5 R7G-RGSF05B200
400 W 1/5 R7G-RGSF05C400
750 W 1/5 R7G-RGSF05C750
Engranajes
reductores (índice
de deceleración)
1/9 R7G-RGSF09B50
1/15 R7G-RGSF15B50
1/25 R7G-RGSF25B50
1/9 R7G-RGSF09B100
1/15 R7G-RGSF15B100
1/25 R7G-RGSF25B100
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
1/25 R7G-RGSF25C400
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
1/25 R7G-RGSF25C400
1/9 R7G-RGSF09C750
1/15 R7G-RGSF15C750
1/25 R7G-RGSF25C750
Nota No existen engranajes reductores para Servo-
motores de 30 W.
● Para Servomotores tipo plano
(holgura = 3′ Máx.)
Especificaciones Modelo
Capacidad del
Servomotor
100 W 1/5 R7G-VRSFPB05B100P
200 W 1/5 R7G-VRSFPB05B200P
400 W 1/5 R7G-VRSFPB05C400P
750 W 1/5 R7G-VRSFPB05C750P
Engranajes
reductores (índice
de deceleración)
1/9 R7G-VRSFPB09B100P
1/15 R7G-VRSFPB15B100P
1/25 R7G-VRSFPB25C100P
1/9 R7G-VRSFPB09C400P
1/15 R7G-VRSFPB15C400P
1/25 R7G-VRSFPB25C200P
1/9 R7G-VRSFPB09C400P
1/15 R7G-VRSFPB15C400P
1/25 R7G-VRSFPB25D400P
1/9 R7G-VRSFPB09D750P
1/15 R7G-VRSFPB15D750P
1/25 R7G-VRSFPB25E750P
Nota No existen engranajes reductores para Servo-
motores de 30 W.
● Para Servomotores tipo plano
(holgura = 45′ Máx.)
Especificaciones Modelo
Capacidad del
Servomotor
100 W 1/5 R7G-RGSF05B100P
200 W 1/5 R7G-RGSF05B200P
400 W 1/5 R7G-RGSF05C400P
750 W 1/5 R7G-RGSF05C750P
Engranajes
reductores (índice
de deceleración)
1/9 R7G-RGSF09B100P
1/15 R7G-RGSF15B100P
1/25 R7G-RGSF25B100P
1/9 R7G-RGSF09C400P
1/15 R7G-RGSF15C400P
1/25 R7G-RGSF25C400P
1/9 R7G-RGSF09C400P
1/15 R7G-RGSF15C400P
1/25 R7G-RGSF25C400P
1/9 R7G-RGSF09C750P
1/15 R7G-RGSF15C750P
1/25 R7G-RGSF25C750P
2-3
Modelos disponibles y especificaciones
Capítulo 2
■ Interfazces pasivas para CN1 ■ Cable de Control para CN1
Especificaciones Modelo
1 m R88A-CPU001S
2 m R88A-CPU002S
1 m R88A-CTU001N
2 m R88A-CTU002N
Especificaciones Modelo
3 m R7A-CEA003S
5 m R7A-CEA005S
10 m R7A-CEA010S
15 m R7A-CEA015S
20 m R7A-CEA020S
3 m R7A-CEA003B
5 m R7A-CEA005B
10 m R7A-CEA010B
15 m R7A-CEA015B
20 m R7A-CEA020B
Especificaciones Modelo
DOS 2 m R7A-CCA002P2
PC98 2 m R7A-CCA002P3
Especificaciones Modelo
Especificaciones Modelo
Especificaciones Modelo
Interfaz
pasiva
Cable de
Servodriver
Cable de
Unidad
de Control de
Posición
Especificaciones Modelo
Para CS1W-NC113/133
CJ1W-NC113/133
C200HW-NC113
C200H-NC112
3F88M-DRT141
(No hay comunicaciones soportadas)
Para CS1W-NC213/233/413/433
CJ1W-NC213/233/413/433
C200HW-NC213/413
C500-NC113/211
C200H-NC211
(No hay comunicaciones soportadas)
Para CS1W-HCP22
CQM1H-PLB21
CQM1-CPU43-V1
(No hay comunicaciones soportadas)
Para CS1W-NC213/233/413/433
CJ1W-NC213/233/413/433
(No hay comunicaciones soportadas)
No hay comunicaciones
soportadas
Comunicaciones soportadas 1 m XW2Z-100J-B7
Para CQM1H-PLB21,
CQM1-CPU43-V1
Para C200H-NC112 0,5 m XW2Z-050J-A4
Para C200H-NC211, C500NC113/211
Para CS1W-NC113,
C200HW-NC113
Para CS1W-NC213/413,
C200HW-NC213/413
Para CS1W-NC133 0,5 m XW2Z-050J-A12
Para CS1W-NC233/433 0,5 m XW2Z-050J-A13
Para CJ1W-NC113 0,5 m XW2Z-050J-A16
Para CJ1W-NC213/413 0,5 m XW2Z-050J-A17
Para CJ1W-NC133 0,5 m XW2Z-050J-A20
Para CJ1W-NC233/433 0,5 m XW2Z-050J-A21
Para CS1W-HCP22
(1 eje)
Para CS1W-HCP22
(2 ejes)
Para 3F88M-DRT141 0,5 m XW2Z-050J-A25
XW2B-20J6-1B
XW2B-40J6-2B
XW2B-20J6-3B
XW2B-40J6-4A
1 m XW2Z-100J-B5
2 m XW2Z-200J-B5
2 m XW2Z-200J-B7
0,5 m XW2Z-050J-A3
1 m XW2Z-100J-A3
1 m XW2Z-100J-A4
0,5 m XW2Z-050J-A5
1 m XW2Z-100J-A5
0,5 m XW2Z-050J-A8
1 m XW2Z-100J-A8
0,5 m XW2Z-050J-A9
1 m XW2Z-100J-A9
1 m XW2Z-100J-A12
1 m XW2Z-100J-A13
1 m XW2Z-100J-A16
1 m XW2Z-100J-A17
1 m XW2Z-100J-A20
1 m XW2Z-100J-A21
0,5 m XW2Z-050J-A22
1 m XW2Z-100J-A22
0,5 m XW2Z-050J-A23
1 m XW2Z-100J-A23
1 m XW2Z-100J-A25
Cable de Control general
(con Conector en un extremo)
Cable de Bloque de Terminales
de Conectores
Bloques de Terminales de Conectores XW2B-40F5-P
■ Cable del Servomotor
Para Servomotores sin
frenos (tanto tipo cilíndrico como tipo plano)
Para Servomotores con
frenos (tanto tipo cilíndrico como tipo plano)
■ Conectores de Cables Periféricos
Cable Monitorización Analógica (CN4) 1 m R88A-CMW001S
Cable de Monitorización del
Ordenador (CN3)
Conector de E/S de Control (CN1) R88A-CNU01C
Conector del Encoder (CN2) R7A-CNA01R
Conector del Encoder (extremo Servomotor) R7A-CNA02R
■ Operadores Digitales
Portátil (con cable de 1 m) R7A-PR02A
■ Resistencias de Regeneración
Externa
Resistencia 220 W 47 Ω R88A-RR22047S
■ Reactancia de c.c.
Para R7D-APA3L/APA5L/APA01L R88A-PX5063
Para R7D-AP02L R88A-PX5062
Para R7D-AP04L R88A-PX5061
Para R7D-APA3H/APA5H/AP01H R88A-PX5071
Para R7D-AP02H R88A-PX5070
Para R7D-AP04H R88A-PX5069
Para R7D-AP08H R88A-PX5061
2-4
■ Soportes para el panel frontal
Especificaciones Modelo
Para SMARTSTEP serie A R88A-TK01W
Modelos disponibles y especificaciones
Capítulo 2
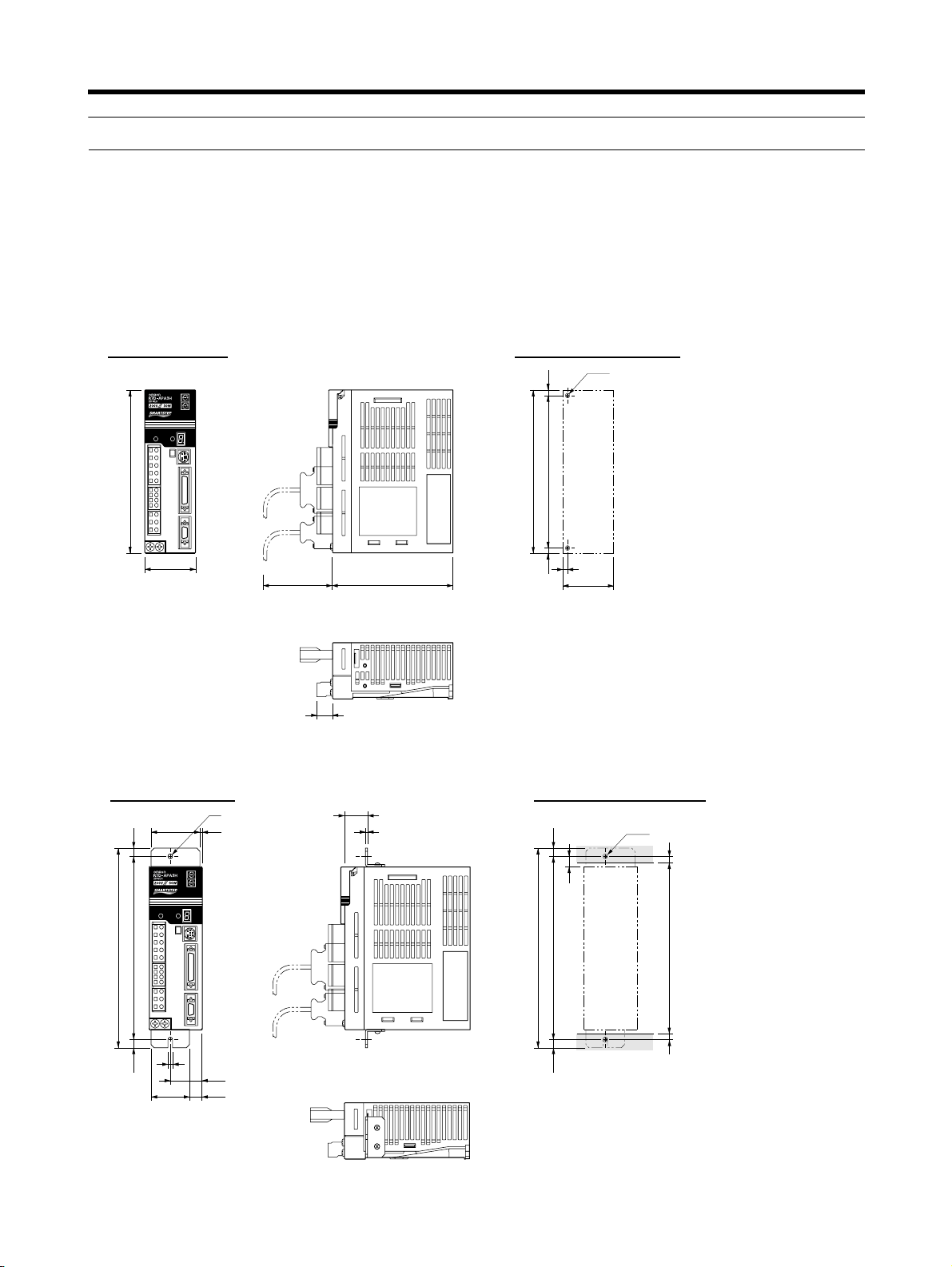
2-2 Dimensiones externas y una vez montado
2-2-1 Servodrivers
■ Monofásico de 100 Vc.a.: R7D-APA3L/-APA5L/-AP01L/-AP02L (30 W a 200 W)
Monofásico 200 Vc.a.: R7D-APA3H/-APA5H/-AP01H/-AP02H (30 W a 200 W)
● Montaje en la pared
Dimensiones externas
Dimensiones una vez montado
Dos, M4
5,5
160
55
(75) 130
17
160
149,5±0,5
(5)
5
55
● Montaje del panel frontal (utilizando soportes de montaje)
Dimensiones externas
5 diá.
52
7,5
1,5
24,5
2
Dimensiones una vez montado
7,5
10
Dos, M4
6
195
180
(7,5)
195
180±0,5
5
32,5
11,542
(7,5)
(168)
6
2-5
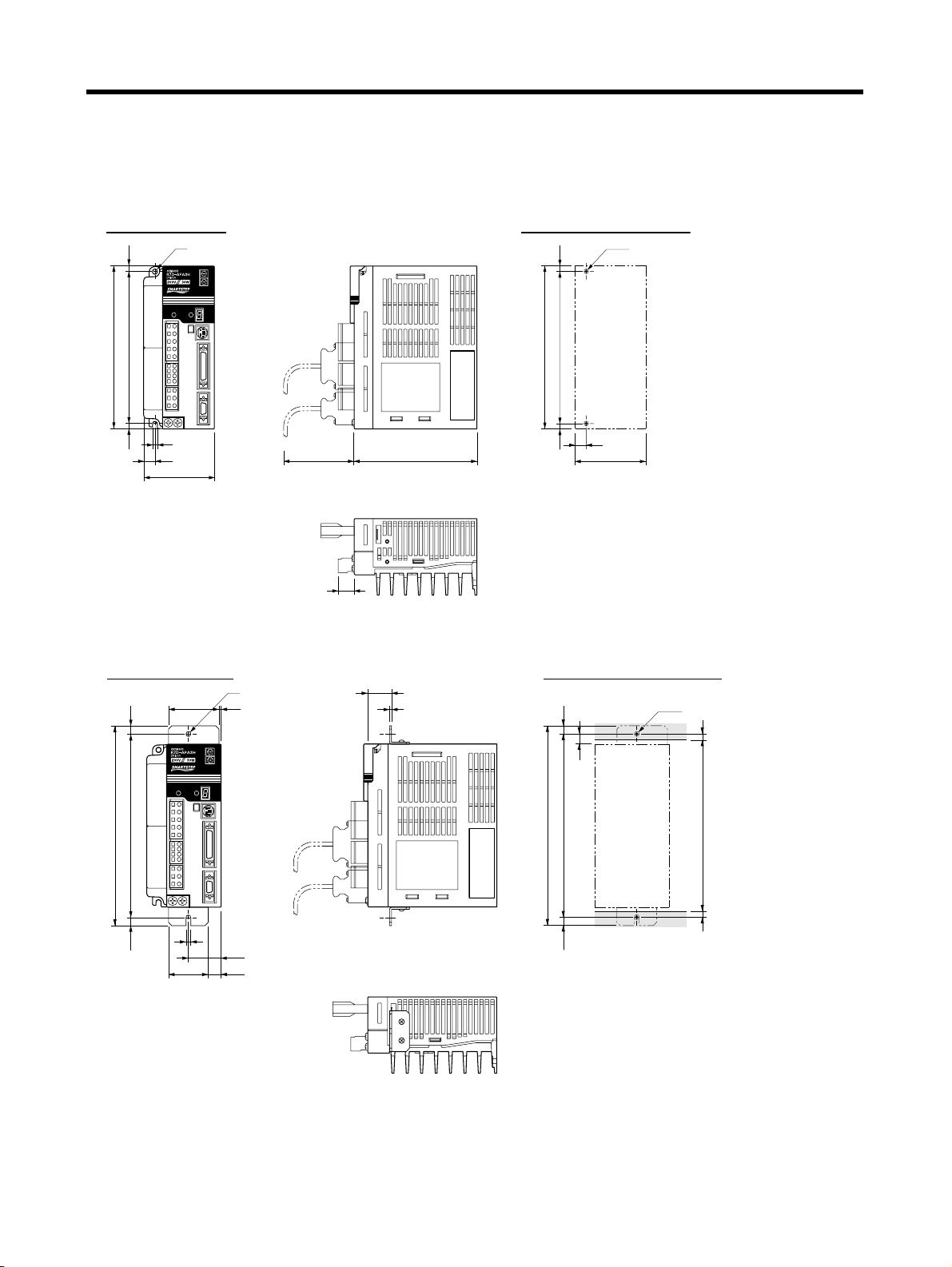
Modelos disponibles y especificaciones
■ Monofásico de 100 Vc.a.: R7D-AP04L (400 W)
Monofásico 200 Vc.a.: R7D-AP04H (400 W)
● Montaje en la pared
Dimensiones externas
5 diá.
Dimensiones una vez montado
5,5
Capítulo 2
Dos, M4
160
149,5 5,5
5
(5)
12
75
(75) 130
17
160
149,5±0,5
(5)
12
75
● Montaje del panel frontal (utilizando soportes de montaje)
Dimensiones externas
7,5
52 1,5
5 diá.
24,5
2
Dimensiones una vez montado
7,5
10
Dos, M4
6
2-6
195
180
(7,5)
195
180±0,5
5
32,5
11,542
(7,5)
(168)
6
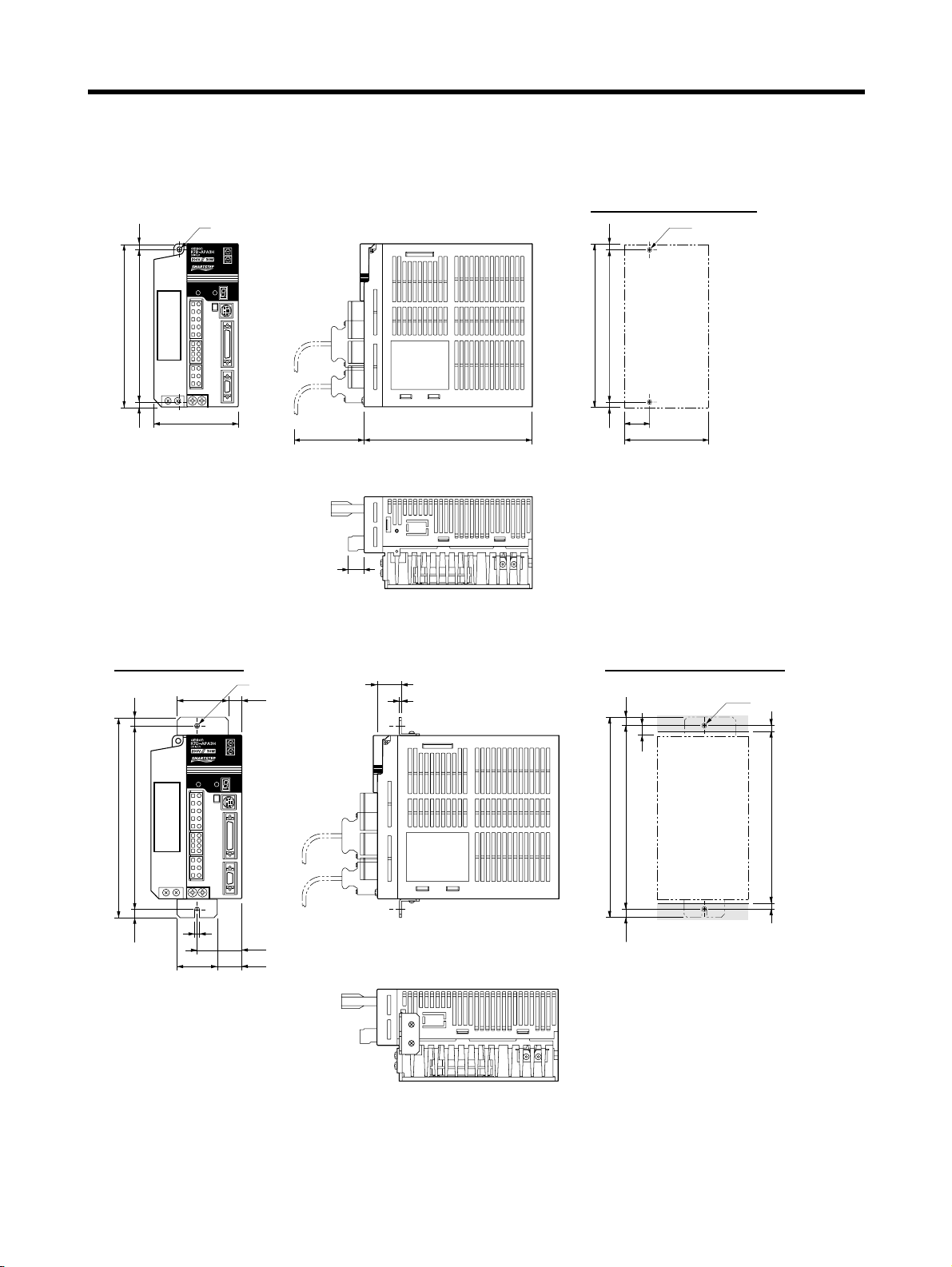
Modelos disponibles y especificaciones
■ Monofásico/trifásico de 200 Vc.a.: R7D-AP08H (750 W)
● Montaje en la pared
Dimensiones externas
5 diá.
Dimensiones una vez montado
5,5
Dos, M4
Capítulo 2
160
149,5 5,5
(5)
90
(75) 180
17
160
149,5±0,5
(5)
27
90
● Montaje del panel frontal (utilizando soportes de montaje)
Dimensiones externas Dimensiones una vez montado
5 diá.
7,5
52 12,5
24,5
2
7,5
10
Dos, M4
6
195
180
(7,5)
195
180±0,5
5
43,5
42
22,5
(7,5)
(168)
6
2-7
Modelos disponibles y especificaciones
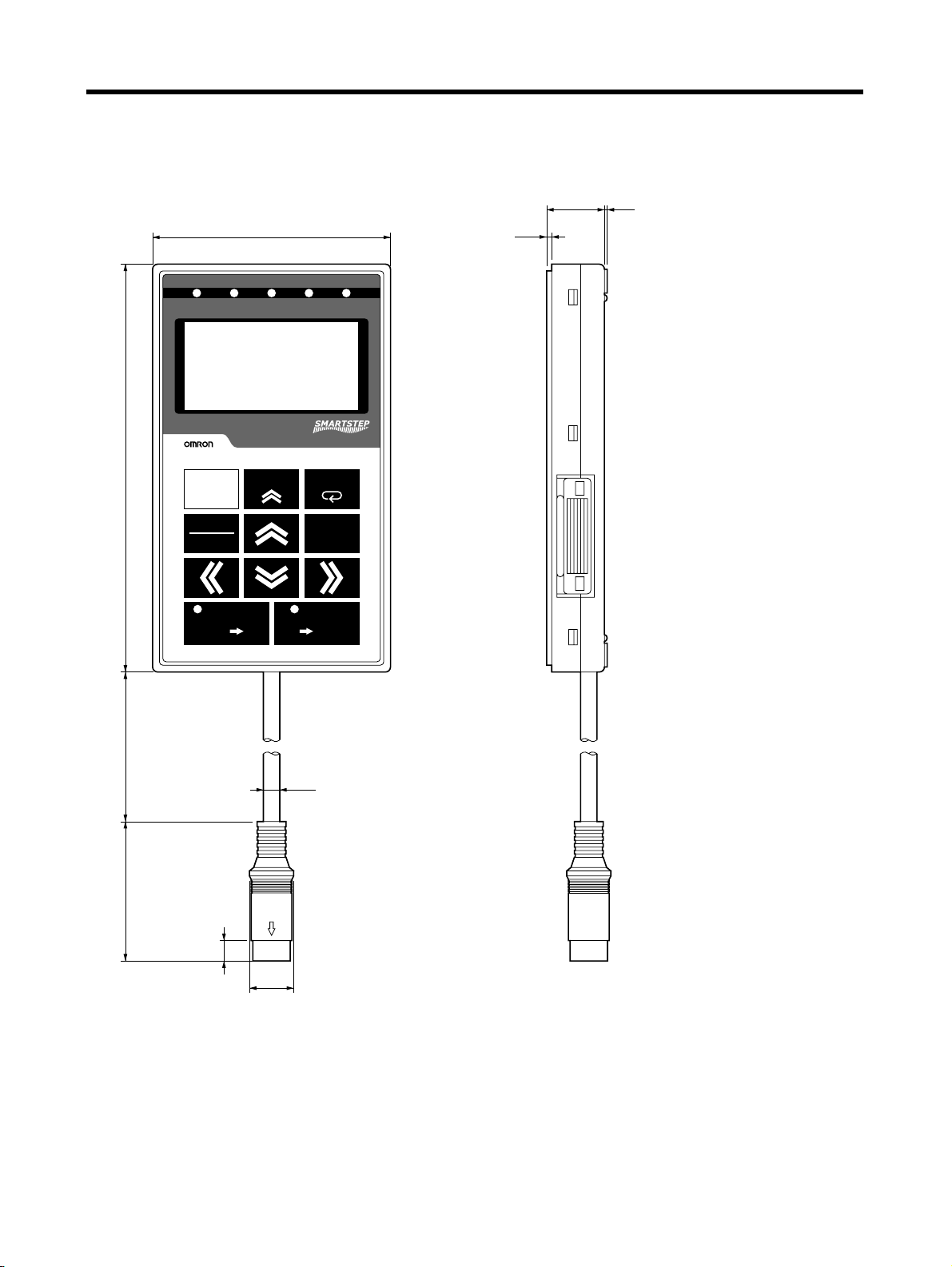
2-2-2 Operador Digital
■ Operador Digital portátil R7A-PR02A
70
1,5
17
Capítulo 2
0,8
1201000
B.B INP
R7A–PR02A
RESET
JOG
RUN
READ
DRIVER PR PR DRIVER
TGON REF POWER
VCMP
PARAMETER UNIT
SCROLL MODE/SET
WRITE
DATA
2-8
4,8 diá.
42
6
13,2 diá.
Modelos disponibles y especificaciones
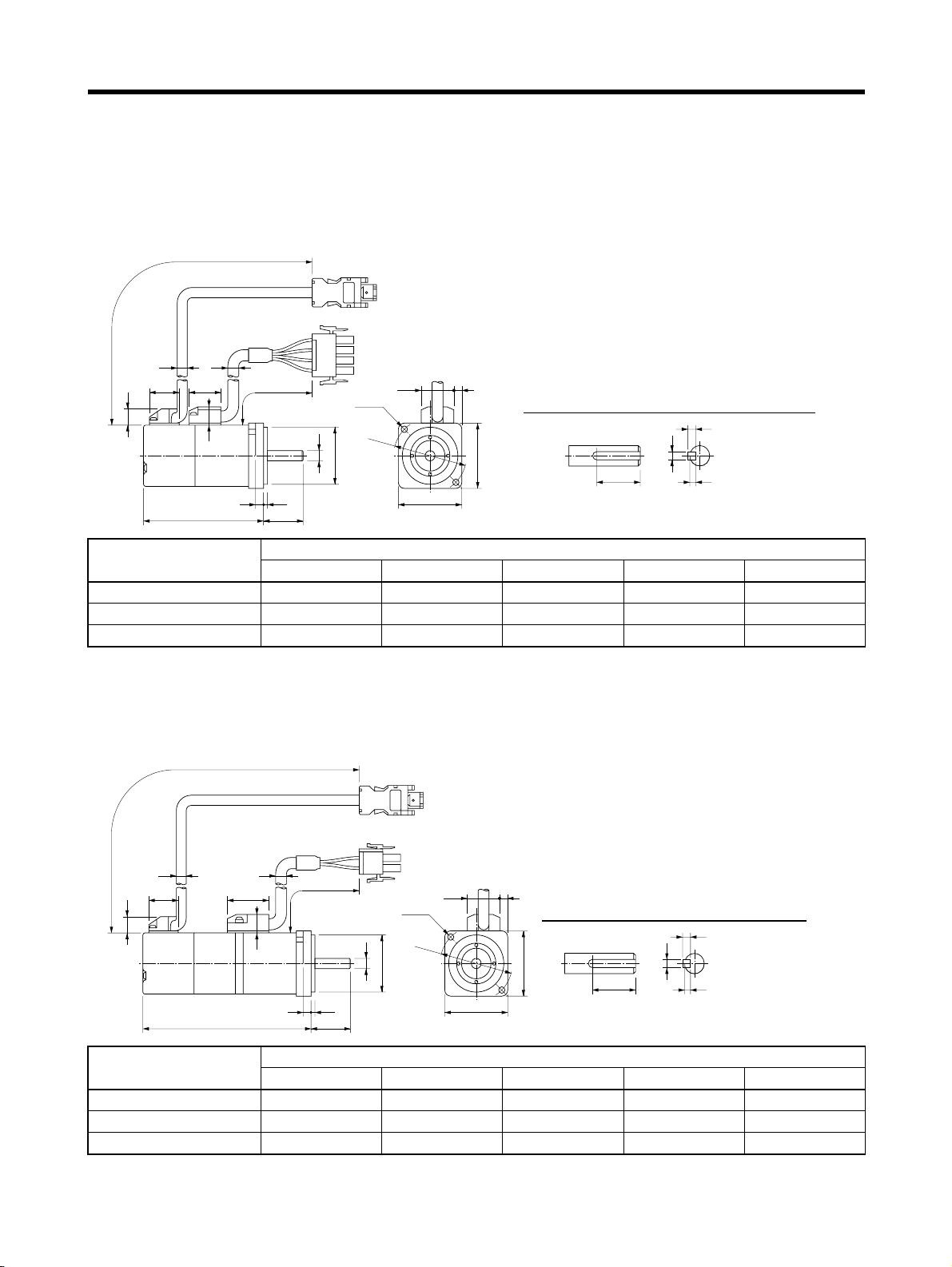
2-2-3 Servomotores
■ Servomotores de tipo cilíndrico sin freno
● 30 W/50 W/100 W R7M-A03030(-S1)/-A05030(-S1)/-A10030(-S1)
300±30
Capítulo 2
6 diá.
19,5
9,5
7 diá.
20
11
LL 25
300±30
S diá.
Dos de 4,3 diá.
30h7 diá.
46 diá.
21,5
5
Dimensiones del extremo del eje con chaveta (-S1)
h
b
40
14
405 2,5
t1
Modelo Dimensiones (mm)
LL S b h t1
R7M-A03030-@ 69,5 6h6 2 2 1,2
R7M-A05030-@ 77 6h6 2 2 1,2
R7M-A10030-@ 94,5 8h6 3 3 1,8
■ Servomotores de tipo cilíndrico con freno
● 30 W/50 W/100 W R7M-A03030-B(S1)/-A05030-B(S1)/-A10030-B(S1)
300±30
6 diá. 7 diá.
19,5
9,5
27
11
LL 25
300±30
S diá.
30h7 diá.
21,5
Dos de 4,3 diá.
46 diá.
5
Dimensiones del extremo del eje con chaveta (-BS1)
h
b
40
14
405 2,5
t1
Modelo Dimensiones (mm)
LL S b h t1
R7M-A03030-B@ 101 6h6 2 2 1,2
R7M-A05030-B@ 108,5 6h6 2 2 1,2
R7M-A10030-B@ 135 8h6 3 3 1,8
2-9
Modelos disponibles y especificaciones
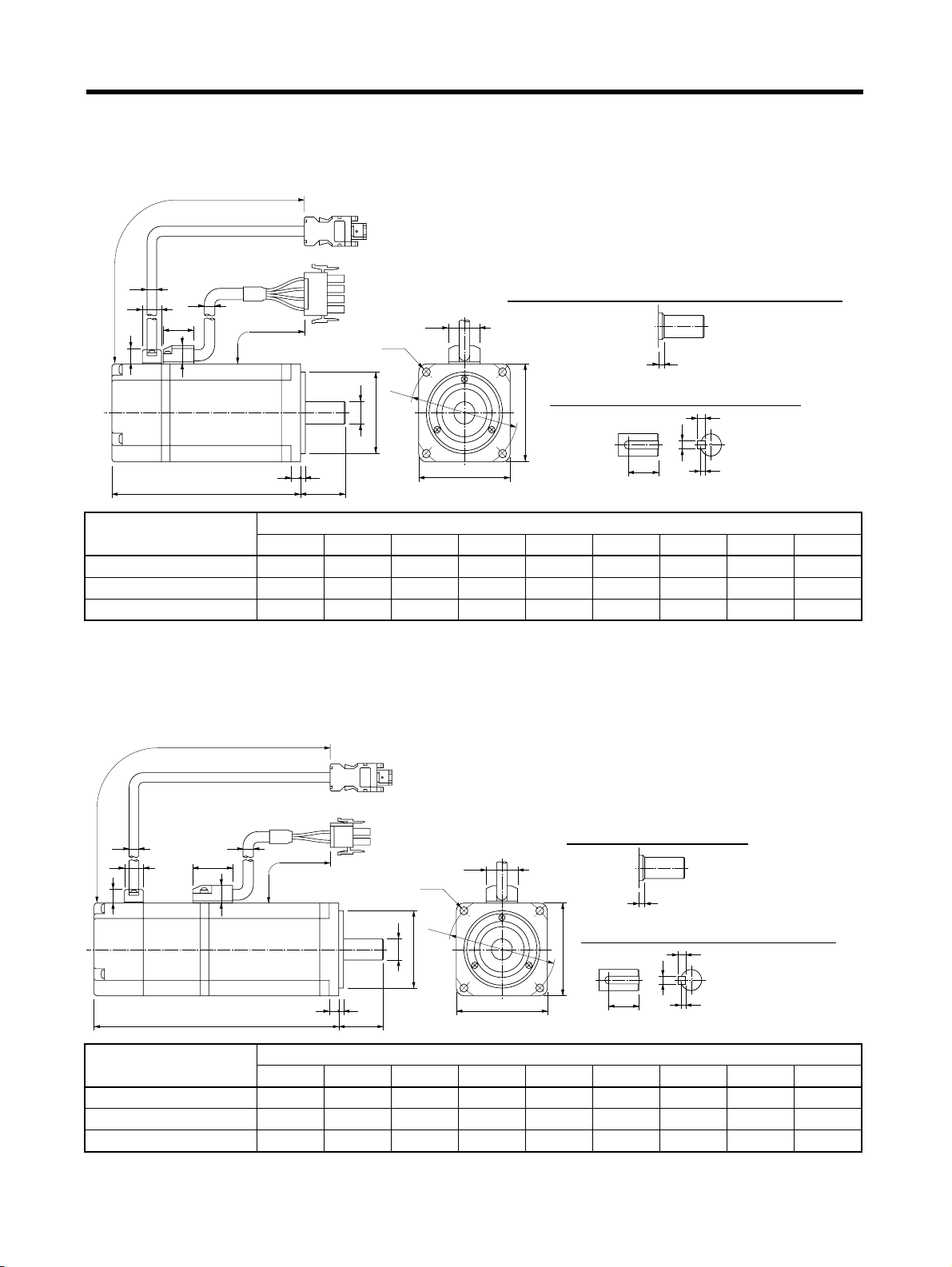
■ Servomotores de tipo cilíndrico sin freno
● 200 W/400 W/750 W R7M-A20030(-S1)/-A40030(-S1)/-A75030(-S1)
300±30
Capítulo 2
6 diá.
13
9
7 diá.
20
11
LL LR
300±30
G3
21,5
Cuatro, Z diá.
D1 diá.
S diá.
D2 diá.
Dimensiones de la sección de salida de los Servomotores de 750 W
2
Dimensiones del extremo del eje con chaveta (-S1)
C
C
QK
5
5
3
Modelo Dimensiones (mm)
LL LR C D1 D2 G Z S QK
R7M-A20030-@ 96,5 30 60 70 50h7 6 5,5 14h6 20
R7M-A40030-@ 124,5 30 60 70 50h7 6 5,5 14h6 20
R7M-A75030-@ 145 40 80 90 70h7 8 7 16h6 30
■ Servomotores de tipo cilíndrico con freno
● 200 W/400 W/750 W R7M-A20030-B(S1)/-A40030-B(S1)/-A75030-B(S1)
300±30
Dimensiones de la sección de salida
6 diá. 7 diá.
13
9
27
11
LL LR
300±30
G3
S diá.
21,5
Cuatro, Z diá.
D1 diá.
D2 diá.
C
de los Servomotores de 750 W
2
Dimensiones del extremo del eje con chaveta (-BS1)
C
QK
5
5
3
Modelo Dimensiones (mm)
LL LR C D1 D2 G Z S QK
R7M-A20030-B@ 136 30 60 70 50h7 6 5,5 14h6 20
R7M-A40030-B@ 164 30 60 70 50h7 6 5,5 14h6 20
R7M-A75030-B@ 189,5 40 80 90 70h7 8 7 16h6 30
2-10
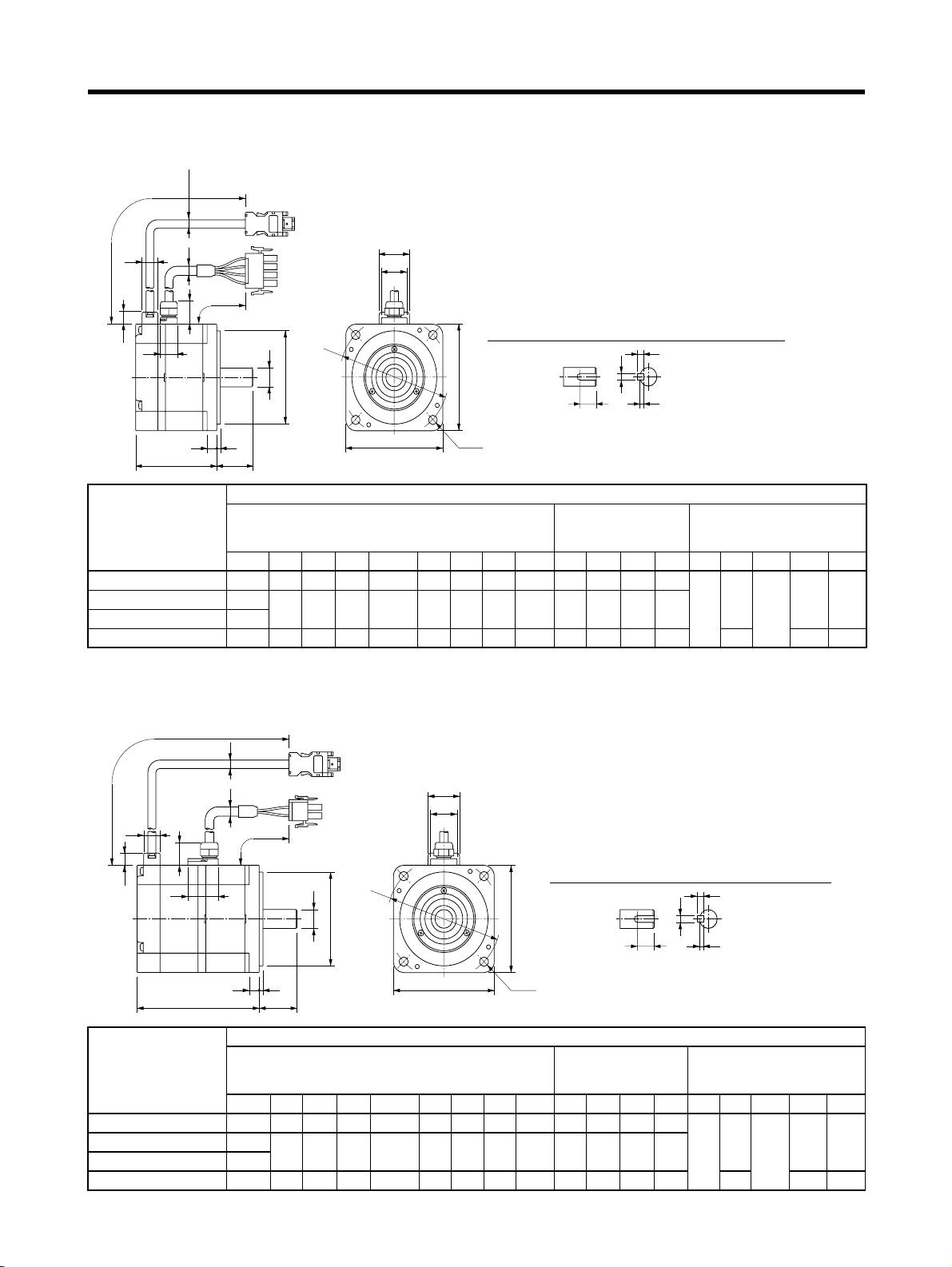
Modelos disponibles y especificaciones
Capítulo 2
■ Servomotores de tipo plano sin freno
● 100 W/200 W/400 W/750 W R7M-AP10030(-S1)/-AP20030(-S1)/-AP40030(-S1)/AP75030(-S1)
6 diá.
300±30
13
A1
7 diá.
300±30
A2
A5
G
LL
S diá.
F
LR
D1 diá.
D2 diá.
A3
A4
Dimensiones del extremo del eje con chaveta (-S1)
h
b
C
QK
C
Cuatro, Z diá.
t1
Modelo Dimensiones (mm)
Dimensiones de un Servomotor básico Con chaveta
(dimensiones del
Dimensiones de la
salida de cable
extremo del eje)
LL LR C D1 D2 F G Z S QK b h t1 A1 A2 A3 A4 A5
R7M-AP10030-@ 62 25 60 70 50h7 3 6 5,5 8h6 14 3 3 1.8 9 18 25 21 14
R7M-AP20030-@ 67 30 80 90 70h7 3 8 7 14h6 16 5 5 3
R7M-AP40030-@ 87
R7M-AP75030-@ 86,5 40 120 145 110h7 3,5 10 10 16h6 22 5 5 3 28 38 19
■
Servomotores de tipo plano con freno
● 100 W/200 W/400 W/750 W R7M-AP10030-B(S1)/-AP20030-B(S1)/-AP40030-B(S1)/AP75030-B(S1)
300±30
6 diá.
7 diá.
13
A2
A1
A5
LL
300±30
D1 diá.
S diá.
D2 diá.
GF
LR
A3
A4
Dimensiones del extremo del eje con chaveta (-BS1)
h
b
C
QK
C
Cuatro, Z diá.
t1
Modelo Dimensiones (mm)
Dimensiones de un Servomotor básico Con chaveta
(dimensiones del
Dimensiones de la
salida de cable
extremo del eje)
LL LR C D1 D2 F G Z S QK b h t1 A1 A2 A3 A4 A5
R7M-AP10030-B@ 91 25 60 70 50h7 3 6 5,5 8h6 14 3 3 1,8 9 18 25 21 23
R7M-AP20030-B@ 98,5 30 80 90 70h7 3 8 7 14h6 16 5 5 3
R7M-AP40030-B@ 118,5
R7M-AP75030-B@ 120 40 120 145 110h7 3,5 10 10 16h6 22 5 5 3 28 38 26
2-11
 Loading...
Loading...