

Page 1

Q2V
Driving Quality
Installation & Operation Instructions
Item code: Q2V-Axxxx-xxx
200 V Class, Three-Phase: 0.1 to 22 kW
200 V Class, Single-Phase: 0.1 to 4.0 kW
400 V Class, Three-Phase: 0.37 to 30 kW
Page 2
1 English
1 English
◆
General Information
Do not use this manual as a replacement for the Technical Manual. The products and
specifications given in this manual and the manual contents can change without notice to make
the product and manual better. Be sure to always use the most recent version of this manual. Use
the manual for the correct installation, wiring, adjustment, and operation of this product. This
manual is available for download on our documentation website. Refer to the back page of this
manual.
◆ Qualifications for the Intended User
This manual is created for electrical specialists and engineers who have experience with AC
drive installation, adjustment, repair, inspection, and parts replacement. Persons without
technical training, minors, persons with disabilities or mental problems, persons with perception
problems, and persons with pacemakers must not use or operate this product.
◆ Safety
Read the safety guidelines carefully before installing, wiring, or operating this product.
■ Explanation of Signal Words
DANGER
WARNING
CAUTION
NOTICE
Identifies a hazardous situation, which, if not avoided, will cause death or serious injury.
Identifies a hazardous situation, which, if not avoided, can cause death or serious injury.
Identifies a hazardous situation, which, if not avoided, can cause minor or moderate injury.
Identifies a property damage message.
■ General Safety Instructions
The manufacturer manufactures and supplies electronic components for a variety of industrial
applications. The selection and application of products is the responsibility of the designer of the
equipment or the customer that assembles the final product. The manufacturer is not responsible
for how our products are incorporated into the final system design. In all cases, our products
should not be incorporated into a product or design as the exclusive or sole safety control
function. All control functions are designed to dynamically detect failures and operate safely
without exception. All products that are designed to incorporate parts manufactured by us must
be provided to the end user and include proper warnings and instructions regarding their safe use
and operation. All warnings from the manufacturer must be promptly issued to the end user. The
manufacturer offers warranties only for the quality of our products, in compliance with
standards and specifications that are described in the manual. The manufacturer does not offer
other warranties, either explicit or implied. Injuries, property damage, and lost business
opportunities caused by improper storage or handling and negligence oversight on the part of
your company or your customers will void our warranty for the product.
Note:
Failure to obey the safety messages in the manual can cause serious injury or death. The manufacturer is not responsible
for injuries or damage to equipment caused by ignoring the safety messages.
• Read this manual carefully when mounting, operating, and repairing AC drives.
• Obey all warnings, cautions, and notices.
• Approved personnel must perform all work.
• Install the drive in an area with these conditions.
2
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 3
1 English
DANGER
wiring on an energized drive. Before servicing, disconnect all power to the equipment and wait for the time
specified on the warning label at a minimum. The internal capacitor stays charged after the drive is de-energized.
The charge indicator LED extinguishes when the DC bus voltage decreases below 50 Vdc. When all indicators
are OFF, measure for dangerous voltages to make sure that the drive is safe. If you do work on the drive when it
is energized, it will cause serious injury or death from electrical shock.
WARNING
W/T3. Connect power supply wiring to main circuit input terminals R/L1, S/L2, and T/L3. Failure to obey can
cause death or serious injury.
WARNING
Failure to obey can cause death or serious injury from falling equipment.
WARNING
to obey can cause death or serious injury and will void warranty. The manufacturer is not responsible for changes
to the product made by the user.
WARNING
replace parts, and repair the drive. Failure to obey can cause death or serious injury.
WARNING
motor case can cause death or serious injury from incorrect equipment grounding.
WARNING
clothing or jewelry. Tighten loose clothing and remove all metal objects such as watches or rings. Failure to obey
can cause death or serious injury.
WARNING
IEC/EN 61800-5-1: 2007 standard specifies that users must wire the power supply to automatically turn off when
the protective ground wire disconnects. Users can also connect a protective ground wire that has a minimum
cross-sectional area of 10 mm
cause death or serious injury.
WARNING
drive, motor, and load before starting Auto-Tuning. The drive and motor can start suddenly during Auto-Tuning
and cause death or serious injury.
WARNING
drive, motor, and machine area and attach covers, couplings, shaft keys, and machine loads before energizing
the drive. Failure to obey can cause death or serious injury.
WARNING
incorrect voltages. Make sure that the drive rated voltage aligns with the power supply voltage before energizing
the drive. Failure to obey can cause death or serious injury.
WARNING
install the drive near flammable or combustible materials. Attach the drive to metal or other noncombustible
material. Failure to obey can cause death or serious injury.
WARNING
are too loose or too tight can cause incorrect operation and damage to the drive. Incorrect connections can also
cause death or serious injury from fire.
WARNING
this manual. Tightening screws at an angle outside of the specified range can cause damage the terminal block or
start a fire if the connection is loose.
WARNING
obey can cause death or serious injury.
WARNING
Device (RCM/RCD) where a residual current operated protective or monitoring device protects against direct or
indirect contact as specified by IEC/EN 60755 The drive can cause a residual current with a DC component in the
protective earthing conductor. Failure to obey can cause death or serious injury.
Electrical Shock Hazard. Electrical Shock Hazard. Do not examine, connect, or disconnect
Fire Hazard. Do not connect power supply wiring to drive output terminals U/T1, V/T2, and
Crush Hazard. Only approved personnel can operate a crane or hoist to move the drive.
Electrical Shock Hazard. Do not make changes to the drive body or drive circuitry. Failure
Electrical Shock Hazard. Only let authorized persons install, wire, maintain, examine,
Electrical Shock Hazard. Always ground the motor-side grounding terminal. Contacting the
Electrical Shock Hazard. Do not work on the drive or around the drive while wearing loose
Electrical Shock Hazard. The leakage current of the drive will be more than 3.5 mA. The
2
(copper wire) or 16 mm2(aluminum wire). Failure to obey these standards can
Sudden Movement Hazard. Remove all persons and objects from the area around the
Sudden Movement Hazard. Remove all persons and objects from the area around the
Fire Hazard. Do not use the main circuit power supply (Overcurrent Category III) at
Fire Hazard. Do not put flammable or combustible materials on top of the drive and do not
Fire Hazard. Tighten all terminal screws to the correct tightening torque. Connections that
Fire Hazard. Tighten screws against the bit at an angle in the specified range described in
Electrical Shock Hazard. Do not cause a short circuit on the drive output circuit. Failure to
Electrical Shock Hazard. Always use a type B Residual Current Monitor/Residual Current
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
3
Page 4

1 English
WARNING
EMC Directive before turning on the EMC filter or if there is high resistance grounding. If the EMC filter is
switched ON without the neutral point being grounded or if there is high resistance grounding, it can cause death
or serious injury.
WARNING
devices after the drive blows a fuse or trips an RCM/RCD. Wait for the time specified on the warning label at a
minimum and make sure that all indicators are OFF. Then check the wiring and peripheral device ratings to find
the cause of the problem. Contact the manufacturer before energizing the drive or peripheral devices if the cause
is not known. Failure to obey can cause death or serious injury and damage to the drive.
WARNING
the drive and set parameters. If you do not test the system, it can cause damage to equipment or serious injury or
death
WARNING
applicable codes and this manual. The drive is suited for circuits that supply not more than 31,000 RMS
symmetrical amperes, 240 Vac maximum (200 V Class), 480 Vac maximum (400 V Class). Failure to obey can
cause death or serious injury.
CAUTION
screws correctly before moving the drive. Failure to obey can cause minor to moderate injury.
CAUTION
minimum, and make sure that the heatsink is cool to replace the cooling fans. Failure to obey can cause minor to
moderate injury.
NOTICE
circuit boards. Failure to obey can cause ESD damage to the drive circuitry.
NOTICE
Incorrect equipment sequencing can cause damage to the drive.
NOTICE
damage to the drive.
NOTICE
obey can cause damage to the drive and connected equipment.
NOTICE
NOTICE
the shield to the ground terminal of the drive. Failure to obey can cause electrical interference and unsatisfactory
system performance.
NOTICE
braking option to the drive, make sure that you review “Braking Unit, Braking Resistor Unit Instruction Manual
(TOBPC72060001)”. Failure to obey can cause damage to the drive and braking circuit.
NOTICE
peripheral devices. Failure to obey can cause damage to the drive.
NOTICE
(RCM/RCD) to the motor circuit. If you connect these devices to the output circuits, it can cause damage to the
drive and connected equipment.
NOTICE
applicable for use with an AC drive. If the motor does not have the correct insulation, it can cause a short circuit or
ground fault from insulation deterioration.
NOTICE
transmitters, near the drive. If you use these devices near the drive, the drive can operate incorrectly.
Electrical Shock Hazard. Ground the neutral point on the power supply to comply with the
Electrical Shock Hazard. Do not immediately energize the drive or operate peripheral
Crush Hazard. Test the system to make sure that the drive operates safely after you wire
Fire Hazard. Install sufficient branch circuit short circuit protection as specified by
Crush Hazard. Do not hold the drive by the front cover or terminal cover. Tighten the
Burn Hazard. Do not touch a hot drive heatsink. De-energize the drive, wait 15 minutes
Observe correct electrostatic discharge (ESD) procedures when touching the drive and
Do not connect or disconnect the motor from the drive while the drive is supplying voltage.
Do not do a withstand voltage test or Megger test on the drive. Failure to obey can cause
Do not connect or operate damaged equipment or equipment with missing parts. Failure to
Install fuses and an RCM/RCD. Failure to obey can cause damage to the drive.
Do not use unshielded wire for control wiring. Use shielded, twisted-pair wires and ground
Do not allow unqualified personnel to use the product. Before you connect a dynamic
Make sure that all connections are correct after you install the drive and connecting
Do not connect phase-advancing capacitors, LC/RC noise filters, or leakage breakers
Use an inverter-duty motor or vector-duty motor with reinforced insulation and windings
Do not put devices that radiate strong electromagnetic waves, for example radio
■ Intended Use
This AC drive is electrical equipment that controls the speed and rotational direction of a motor
in a commercial application. Do not use this product for other functions.
4
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 5
1 English
1. Read and understand all safety precautions.
2. Wire and ground the drive as specified by all applicable standards and safety precautions.
3. Tightly attach all parts and protective covers.
4. Always use the product in the correct environmental conditions as specified in this manual.
Note:
This product is not designed and manufactured for use in life-support machines or systems.
WARNING
Install applicable safety devices to minimize the risk of accidents when installing the product where its failure
could cause a life-or-death situation, loss of human life, or a serious accident or physical injury.
Injury to Personnel. This product is manufactured with strict quality-control guidelines.
■ Exclusion of Liability
The manufacturer cannot be held responsible for any damages to the product, equipment or
persons if this product is used in any other way than specified in Intended Use on page 4.
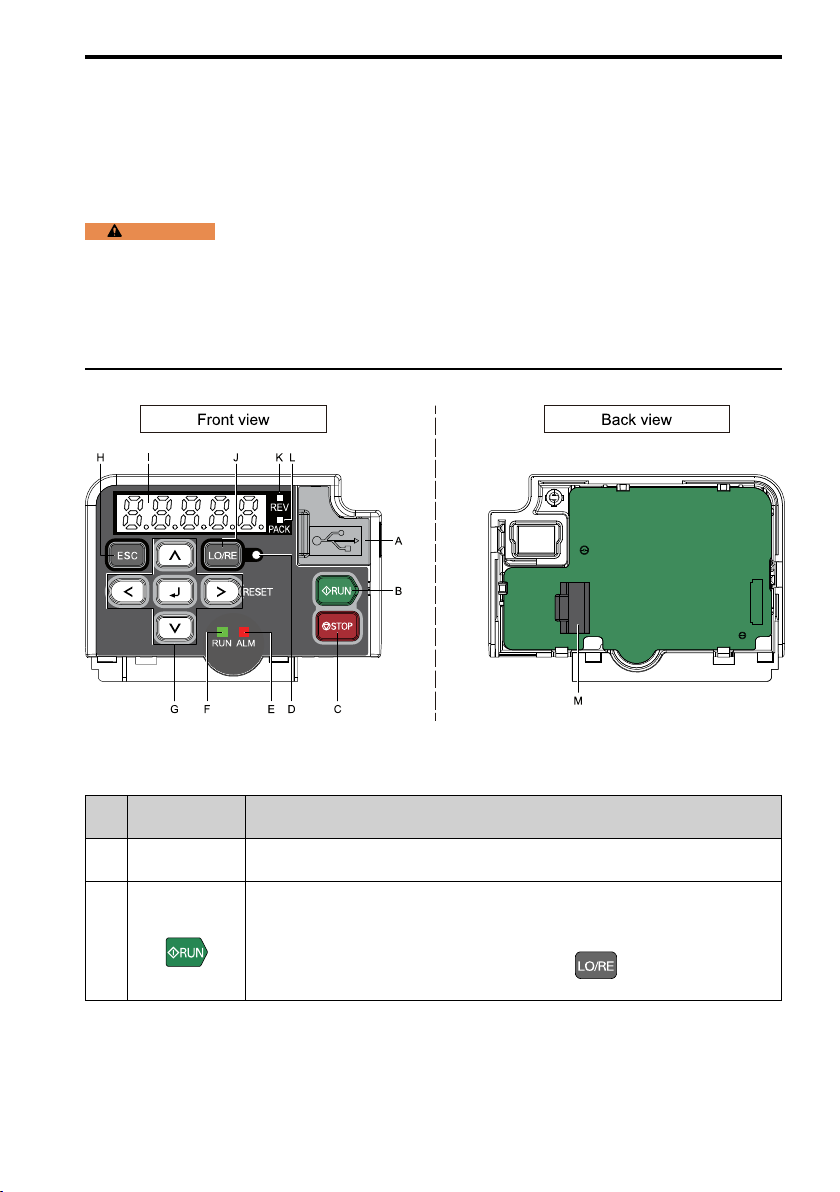
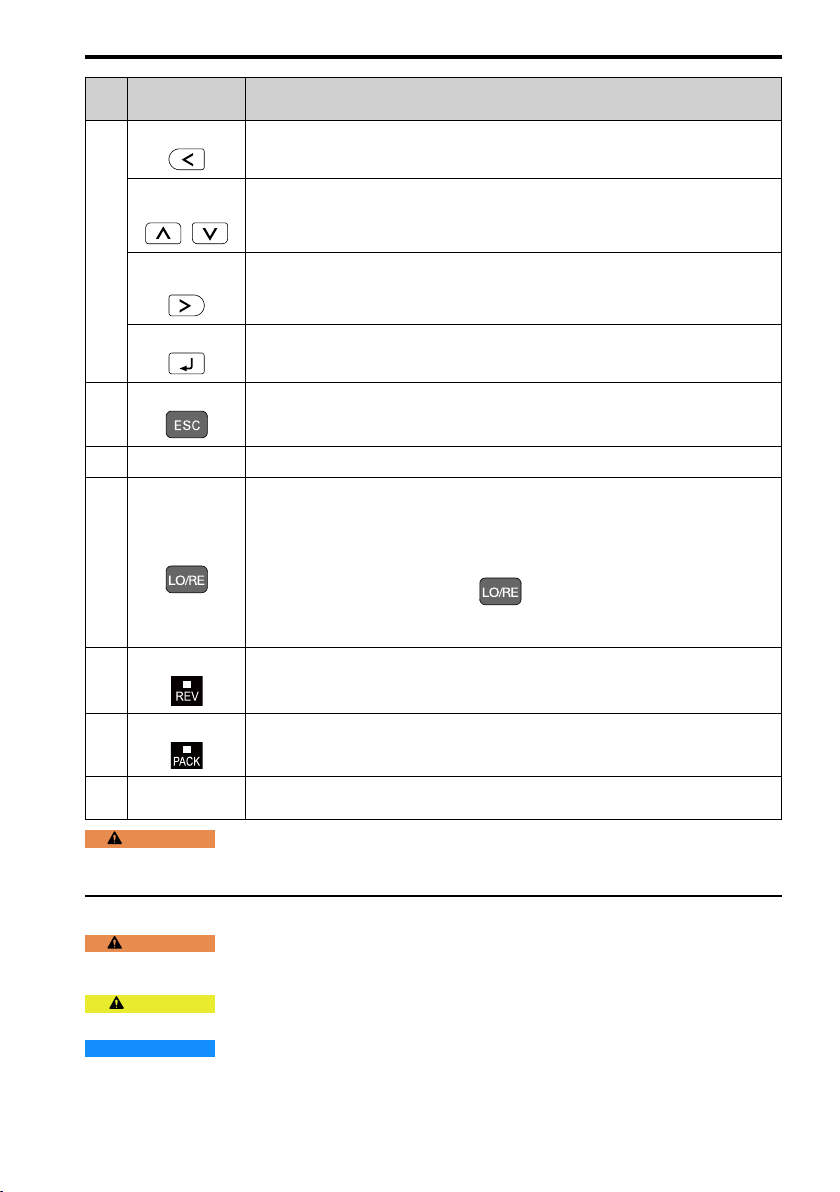
◆ Keypad: Names and Functions
Figure 1.1 Keypad
Table 1.1 Keypad: Names and Functions
Sym
bol
A USB Terminal
B
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Name Function
Insertion point for a USB cable. Use a USB cable (USB standard 2.0, type A - mini-B) to
connect the drive to a PC.
Starts the drive in LOCAL Mode.
RUN Key
Starts the motor tuning procedure in Auto-Tuning Mode.
Note:
Before you use the keypad to operate the motor, push on the keypad to set the
drive to LOCAL Mode.
5
Page 6
1 English
Sym
bol
C
D
E
F
Name Function
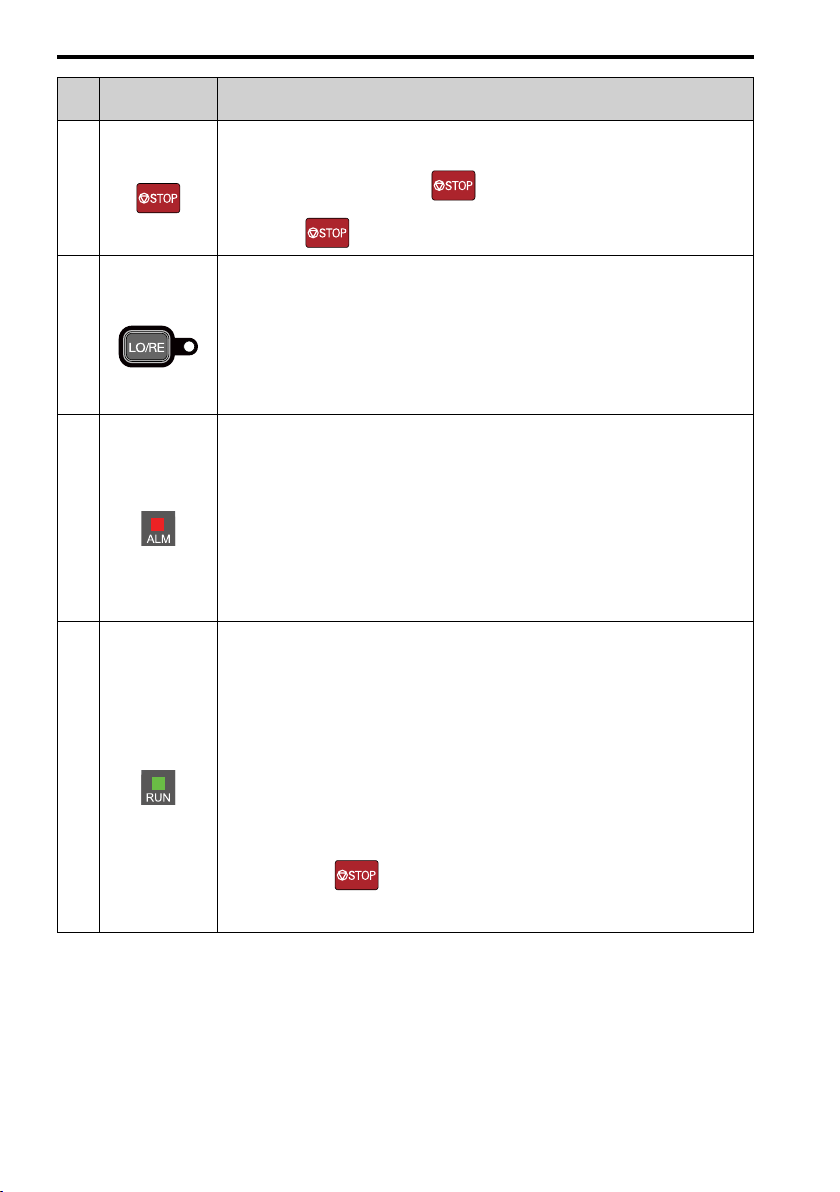
Stops drive operation.
STOP Key
LO/RE LED
ALM/ERR LED
RUN LED
Note:
Uses a stop-priority circuit. Push to stop the motor. This will also stop the motor
when a Run command is active at an external Run command source (REMOTE Mode).
To disable priority, set o2-02 = 0 [STOP Key Selection of Function = Disabled].
• Illuminated: The keypad controls the Run command (LOCAL Mode).
• OFF: The control circuit terminal or serial transmission device controls the Run command
(REMOTE Mode).
Note:
• LOCAL: Operated using the keypad. Use the keypad to enter Run/Stop commands and
the frequency reference command.
• REMOTE: Operated from the control circuit terminal or serial transmission. Use the
frequency reference source entered in b1-01 and the Run command source selected in
b1-02.
• Illuminated: The drive detects a fault.
• OFF: There are no drive faults or alarms.
• Flashing:
– An alarm
– An oPE parameter setting error
– An Auto-Tuning error
Note:
The LED will illuminate to identify a fault if the drive detects a fault and an alarm at the
same time.
Illuminated: The drive is in regular operation.
OFF: The drive is stopped.
Flashing:
• The drive is decelerating to stop.
• The drive received a Run command, but the frequency reference is 0 Hz.
Flashing quickly:
• The drive received a Run command from the MFDI terminals and is switching to
REMOTE Mode while the drive is in LOCAL Mode.
• The drive received a Run command from the MFDI terminals when the drive is not in
Drive Mode.
• The drive received a Fast Stop command.
• The safety function shuts off the drive output.
• The user pushed on the keypad while the drive is operating in REMOTE Mode.
• The drive is energized with an active Run command and b1-17 = 1 [RUN@PowerUp
Selection = Disregard RUN].
6
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 7
1 English
Sym
bol
G
H
I LED Display
J
K
Name Function
Left Arrow Key Moves the cursor to the left.
Up Arrow Key/
Down Arrow Key
/
Right Arrow Key
(RESET)
ENTER Key • Enters parameter values and settings.
ESC Key • Goes back to the previous screen.
LO/RE Selection
Key
REV LED Illuminated: The drive received a Reverse run command.
• Moves to a different screen.
• Selects parameter numbers and increments or decrements setting values.
• Moves the cursor to the right.
• Restarts the drive to clear a fault.
• Selects each mode, parameter, and set value.
• Push and hold to go back to the frequency reference screen (the initial screen).
Shows parameters, errors, and other data.
Switches drive control for the Run command and frequency reference between the keypad
(LOCAL) and an external source (REMOTE).
Note:
• The LOCAL/REMOTE Selection Key continuously stays enabled after the drive stops
in Drive Mode. If the application must not switch from REMOTE to LOCAL because it
will have a negative effect on system performance, set o2-01 = 0 [LO/RE Key Selection
of Function = Disabled] to disable .
• If the drive is receiving a Run command from an external source, it will not switch
between LOCAL and REMOTE.
PACK LED Illuminated: The drive is In Q2Pack operation.
L
M RJ-45 Connector
WARNING
when setting b1-07 = 2 [LO/RE Run Selection = Accept RUN]. Clear all personnel from rotating machinery and
electrical connections prior to switching control sources. Failure to comply may cause death or serious injury.
Connects to the drive using an RJ-45 8-pin straight through UTP CAT5e extension cable or
keypad connector.
Sudden Movement Hazard. The drive may start unexpectedly if switching control sources
◆ Mechanical Installation
WARNING
install the drive near flammable or combustible materials. Attach the drive to metal or other noncombustible
material. Failure to obey can cause death or serious injury.
CAUTION
screws correctly before moving the drive. Failure to obey can cause minor to moderate injury.
NOTICE
Shield the drive from electrical interference if components must be near the drive. Failure to obey can cause
incorrect operation.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Fire Hazard. Do not put flammable or combustible materials on top of the drive and do not
Crush Hazard. Do not hold the drive by the front cover or terminal cover. Tighten the
Do not put drive peripheral devices, transformers, or other electronics near the drive.
7
Page 8
1 English
NOTICE
drive during drive installation and project construction. Put a temporary cover over the top of the drive during
installation. Remove the temporary cover before start-up or the drive will overheat. Failure to obey can cause
damage to the drive.
NOTICE
operation and damage to electrical devices.
NOTICE
Incorrect ESD procedures can cause damage to the drive circuitry.
Do not let unwanted objects, for example metal shavings or wire clippings, fall into the
Install the drive as specified by EMC Guidelines. Failure to obey can cause incorrect
Obey correct electrostatic discharge (ESD) procedures when you touch the drive.
■ Installation Environment
The installation environment is important for the lifespan of the product and to make sure that
the drive performance is correct. Make sure that the installation environment agrees with these
specifications.
2
, 19.36 ft/s2)
Conditions
Environment
Area of Use
Power Supply
Ambient
Temperature
Setting
Humidity
Storage
Temperature
Surrounding Area
Altitude
Vibration
Installation
Position
Indoors
Overvoltage Category III
IP20 enclosure: -10 °C to +50 °C (14 °F to 122 °F).
UL Type 1 enclosure: -10 °C to +40 °C (14 °F to 104 °F).
• Drive reliability is better in environments that do not have wide temperature fluctuations.
• When installing the drive in an enclosure, use a cooling fan or air conditioner to keep the internal
air temperature in the permitted range.
• Do not let the drive freeze.
95% RH or less, non-condensing
-20 °C to +70 °C (-4 °F to +158 °F)
Pollution degree 2 or less
Install the drive in an area without:
• Oil mist, corrosive or flammable gas, or dust
• Metal powder, oil, water, or other unwanted materials
• Radioactive materials or flammable materials
• Harmful gas or fluids
• Salt
• Direct sunlight
Keep wood and other flammable materials away from the drive.
1000 m (3281 ft.) maximum
Note:
Derate the output current by 1% for each 100 m (328 ft.) to install the drive in altitudes between
1000 m to 4000 m (3281 ft. to 13123 ft.).
It is not necessary to derate the rated voltage in these conditions:
• When installing the drive at 2000 m (6562 ft.) or lower
• When installing the drive between 2000 m to 4000 m (6562 ft. to 13123 ft.) and grounding the
neutral point on the power supply.
Contact the manufacturer or your nearest sales representative when not grounding the neutral
point.
• 10 Hz to 20 Hz: 1 G (9.8 m/s
• 20 Hz to 55 Hz: 0.6 G (5.9 m/s
Install the drive vertically for sufficient cooling airflow.
2
, 32.15 ft/s2)
8
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 9
1 English
■ Removing the Covers
DANGER
indicator LED to go off, then remove the covers. Failure to obey could cause death or serious injury.
Electrical shock Hazard. Disconnect the power to the drive and wait for the charge
◆ Electrical Installation
DANGER
wiring on an energized drive. Before servicing, disconnect all power to the equipment and wait for the time
specified on the warning label at a minimum. The internal capacitor stays charged after the drive is de-energized.
The charge indicator LED extinguishes when the DC bus voltage decreases below 50 Vdc. When all indicators
are OFF, measure for dangerous voltages to make sure that the drive is safe. If you do work on the drive when it
is energized, it will cause serious injury or death from electrical shock.
WARNING
drive covers before energizing the drive. Use terminals for their intended function only. Incorrect wiring or ground
connections, and incorrect repair of protective covers can cause death or serious injury.
WARNING
switch. Failure to obey can cause death or serious injury.
WARNING
Refer to the technical manual for more information about the I/O terminals. Wiring and grounding incorrectly or
modifying the cover may damage the equipment or cause injury.
Electrical Shock Hazard. Electrical Shock Hazard. Do not examine, connect, or disconnect
Electrical Shock Hazard. Make sure that all electrical connections are correct and install all
Electrical Shock Hazard. Correctly ground the drive before turning on the EMC filter
Electrical Shock Hazard. Use the terminals for the drive only for their intended purpose.
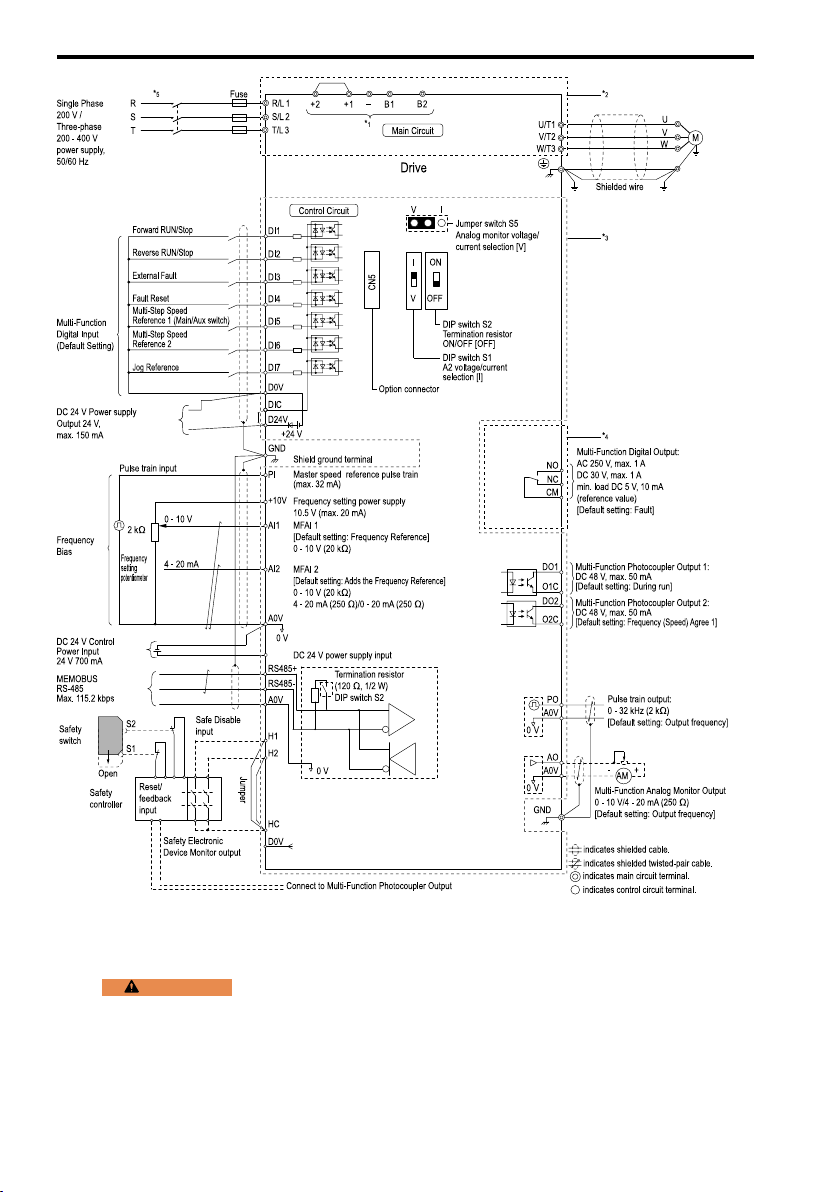
■ Standard Connection Diagram
Wire the drive as specified by Figure 1.2. Refer to Main Circuit Wire Gauges and Tightening
Torques on page 44 for wire gauges and tightening torques as specified by European standards
and UL standards.
WARNING
control circuit wiring. Incorrect Run/Stop circuit sequence settings can cause death or serious injury from moving
equipment.
WARNING
energizing the drive. Momentarily closing a digital input terminal can start a drive that is programmed for 3-Wire
control. Failure to obey can cause death or serious injury from moving equipment.
WARNING
Parameters = 3-Wire Initialization] and make sure that b1-17 = 1 [RUN@PowerUp Selection = Disregard RUN]
(default). If you do not correctly set the drive parameters for 3-Wire operation before you energize the drive, the
motor can suddenly rotate in reverse when you energize the drive. This can cause serious injury or death.
WARNING
applicable codes and this manual. The drive is suited for circuits that supply not more than 31,000 RMS
symmetrical amperes, 240 Vac maximum (200 V Class), 480 Vac maximum (400 V Class). Failure to obey can
cause death or serious injury.
NOTICE
(328 ft.) be sure to use a drive duty motor or carefully monitor the motor insulation voltage. Failure to obey can
cause damage to the motor insulation.
NOTICE
cause incorrect control circuit operation.
Sudden Movement Hazard. Set the MFDI terminal parameters before you close the
Sudden Movement Hazard. Correctly wire the start/stop and safety circuits before
Sudden Movement Hazard. When you use a 3-Wire sequence, set A1-03 = 3330 [Init
Fire Hazard. Install sufficient branch circuit short circuit protection as specified by
When the input voltage is 440 V or higher or if the wiring distance is longer than 100 m
Do not connect the AC control circuit ground to the drive enclosure. Failure to obey can
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
9
Page 10
1 English
E24
Figure 1.2 Standard Connection Diagram
*1 For three-phase 200 V class and 400 V class drives, use terminals -, +1, +2, B1, and B2 to connect options to the
drive. For single-phase 200 V class drives, use terminals -, +1, B1, and B2 to connect options to the drive.
WARNING
terminals B1, B2, -, +1, +2, and +3 terminals. Do not connect AC power to these terminals. Incorrect wiring
can cause damage to the drive and serious injury or death from fire.
*2 For circuit protection, the main circuit is separated from the surface case that can touch the main circuit.
*3 The control circuit is a Safety Extra-Low Voltage circuit. Separate this circuit from other circuits with reinforced
insulation. Make sure that the Safety Extra-Low Voltage circuit is connected as specified.
10
Fire Hazard. Only connect factory-recommended devices or circuits to drive
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 11
1 English
*4 Reinforced insulation separates the output terminals from other circuits. Users can also connect circuits that are not
Safety Extra-Low Voltage circuits if the drive output is 250 Vac 1 A max. or 30 Vdc 1 A maximum.
*5 Set L8-05 = 1 [In PhaseLoss Selection = Enabled] or set the wiring sequence to prevent input phase loss.
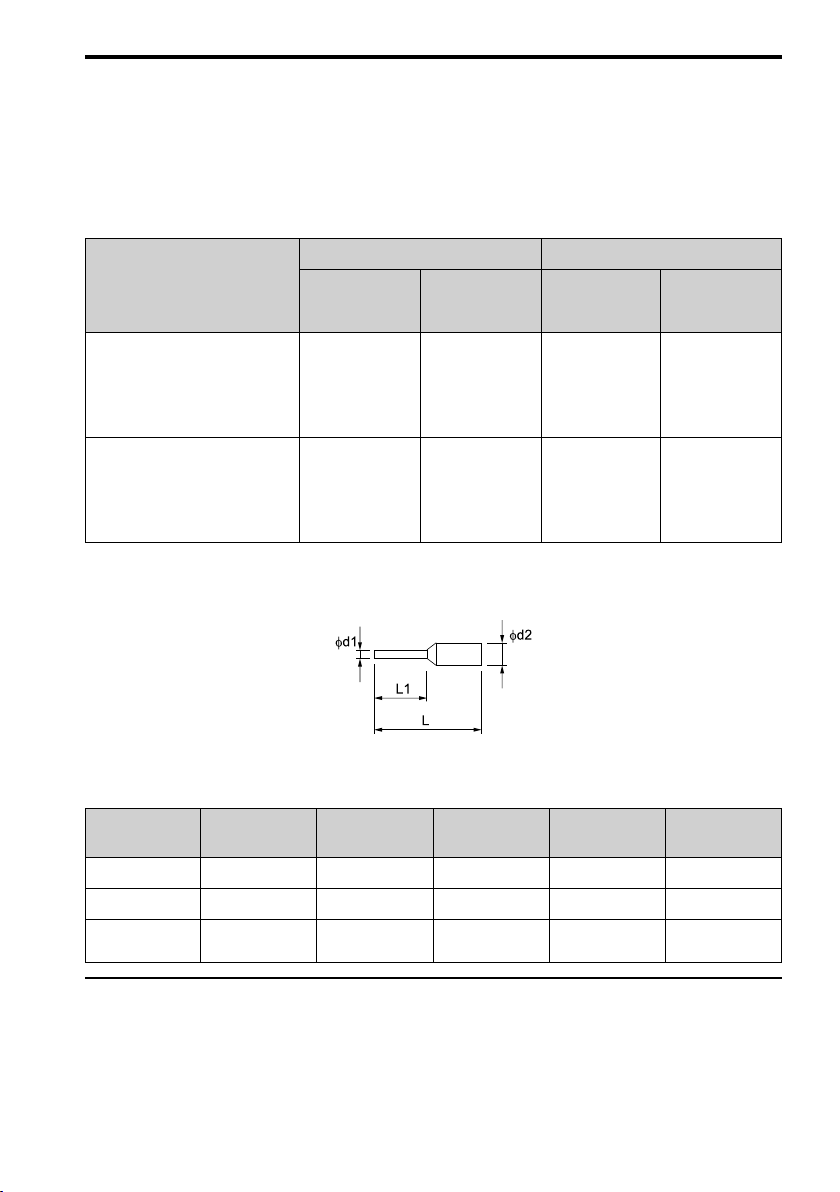
■ Control Circuit Wire Gauges and Tightening Torques
Use shielded wire for control circuit terminal wiring. Use crimp ferrules on the wire ends for
more reliable wiring.
Table 1.2 Wire Gauges
Bare Wire Crimp Ferrule
Terminal
E24V, DI1-DI7, D0V, DIC, D24V
AO, A0V, AI1, AI2, +10V, H1, H2,
HC
PO, PI, RS485+, RS485-, DO1,
O1C, DO2, O2C
NO, NC, CM
Recommended
Gauge
2
mm
(AWG)
0.75
(18)
0.75
(18)
Crimp Ferrules
Attach an insulated sleeve to the wire when you use crimp ferrules. We recommend the
CRIMPFOX 6 crimping tool from PHOENIX CONTACT.
Applicable
Gauge
2
mm
(AWG)
• Stranded wire
0.25 - 1.0
(24 - 17)
• Solid wire
0.25 - 1.5
(24 - 16)
• Stranded wire
0.25 - 1.5
(24 -16)
• Solid wire
0.25 - 1.5
(24 - 16)
Recommended
Gauge
2
mm
(AWG)
0.5
(20)
0.5
(20)
Applicable
Gauge
2
mm
(AWG)
0.25 to 0.5
(24 to 20)
0.25 to 1.0
(24 to 17)
Figure 1.3 Crimp Ferrule Dimensions
Table 1.3 Crimp Ferrule Models and Dimensions
Wire Gauge
2
mm
(AWG)
0.25 (24) AI 0.25-8YE 12.5 8 0.8 2.0
0.34 (22) AI 0.34-8TQ 12.5 8 0.8 2.0
0.5 (20) AI 0.5-8WH,
Model L (mm) L1 (mm) d1 (mm) d2 (mm)
AI 0.5-8OG
14 8 1.1 2.5
◆ Drive Start-Up
Refer to the motor nameplate and record the information in this table before you start the drive.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
11
Page 12
1 English
Item Value
Motor Rated Power kW
Motor Rated Voltage V
Motor Rated Current A
Motor Rated Frequency Hz
Note:
• When you change A1-02 [Control Method], the settings of some parameters automatically change.
• This manual also shows parameters that are not in Setup Mode. Use the to set the parameters not
shown in the Setup Mode.
Motor Maximum
Frequency
Number of Motor Poles
Motor Base Rotation Speed min
Number of Motor Encoder
Pulses
Item Value
◆ Drive Parameters
Refer to the following table when setting the most important parameters.
Note:
You can change parameters with “RUN” in the “No.” column during Run.
No.
(Hex.)
A1-02
(0102)
A1-03
(0103)
b1-01
(0180)
b1-02
(0181)
b1-03
(0182)
b1-04
(0183)
C1-01
(0200)
RUN
C1-02
(0201)
RUN
C2-01
(020B)
Name Description
Control Method Sets the control method for the drive application and the motor.
0: V/f Control, 1: PG V/f Control, 2: OLVector, 3: CLVector, 4: Adv OLVector,
5: PM OLVector, 6: PM AOLVector, 7: PM CLVector, 8: EZ Vector
Init Parameters Sets parameters to default values.
Freq. Ref. Sel. 1 Sets the input method for the frequency reference.
Run Comm. Sel 1 Sets the input method for the Run command.
Stopping Method
Selection
Reverse Operation
Selection
Accel Time 1 Sets the length of time to accelerate from zero to maximum output frequency.
Decel Time 1 Sets the length of time to decelerate from maximum output frequency to zero.
Jerk@Start of Accel Sets the jerk acceleration time at start.
0: No Initialization, 1110: User / Solution Initialization,
2220: 2-Wire Initialization, 3330: 3-Wire Initialization, 4440: Q2pack Init
0: Keypad, 1: Analog Input, 2: Modbus, 3: Option PCB, 4: Pulse Train Input
0: Keypad, 1: Analog Input, 2: Modbus, 3: Option PCB
Sets the method to stop the motor after removing a Run command or entering a
Stop command.
0: Ramp->Stop, 1: Coast->Stop, 2: DC Inj->Stop, 3: Timed Coast->Stop,
9: Distance Stop
Sets the reverse operation function. Disable reverse operation in fan or pump
applications where reverse rotation is dangerous.
0: Enabled, 1: Disabled
-1
(r/min)
Hz
ppr
12
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 13
1 English
No.
(Hex.)
C2-02
(020C)
C2-03
(020D)
C2-04
(020E)
C6-01
(0223)
C6-02
(0224)
d1-01 to d1-
16
(0280 - 0291)
RUN
d1-17
(0292)
RUN
d2-01
(0289)
d2-02
(028A)
E1-01
(0300)
E1-04
(0303)
E1-05
(0304)
E1-06
(0305)
E1-09
(0308)
E2-01
(030E)
E2-11
(0318)
Name Description
Jerk@End of Accel Sets the jerk acceleration time at completion.
Jerk@Start of Decel Sets the jerk deceleration time at start.
Jerk@End of Decel Sets the jerk deceleration time at completion.
ND/HD Duty
Selection
Carrier Frequency
Selection
Reference 1 to
Reference 16
Jog Reference Sets the JOG frequency reference in the units from o1-03 [FrqDisplay Unit
FRef Upper Limit Sets maximum limit for all frequency references. This value is a percentage of
FRef Lower Limit Sets minimum limit for all frequency references. This value is a percentage of
Input AC Supply
Voltage
Max Output
Frequency
Max Output Voltage Sets the maximum output voltage for the V/f pattern.
Base Frequency Sets the base frequency for the V/f pattern.
Min Output Frequency Sets the minimum output frequency for the V/f pattern.
Mot Rated Current
(FLA)
Motor Rated Power
(kW)
Sets the drive duty rating.
0: HD Rating, 1: ND Rating
Sets the carrier frequency for the transistors in the drive.
1: 2.0 kHz, 2: 5.0 kHz (4.0 kHz for AOLV/PM),
3: 8.0 kHz (6.0 kHz for AOLV/PM), 4: 10.0 kHz (8.0 kHz for AOLV/PM),
5: 12.5 kHz (10.0 kHz for AOLV/PM), 6: 15.0 kHz (12.0 kHz AOLV/PM),
7: Swing PWM 1 (Audible Sound 1), 8: Swing PWM 2 (Audible Sound 2),
9: Swing PWM 3 (Audible Sound 3), A: Swing PWM 4 (Audible Sound 4),
B: Leakage Current Rejection PWM, F: User (C6-03 to C6-05)
Sets the frequency reference in the units from o1-03 [FrqDisplay Unit
Selection].
Selection]. Set H1-xx: MFDI Function Select = 6 [Jog Reference] to use the Jog
frequency reference.
E1-04 [Max Output Frequency].
E1-04 [Max Output Frequency].
Sets the drive input voltage.
Sets the maximum output frequency for the V/f pattern.
Sets the motor rated current in amps.
Sets the motor rated output in 0.01 kW increments.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
13
Page 14
1 English
No.
(Hex.)
H1-01 - H1-
07
(0438, 0439,
0400 - 0404)
H2-01
(040B)
H2-02
(040C)
H2-03
(040D)
H3-01
(0410)
H3-02
(0434)
H3-03
(0411)
RUN
H3-04
(0412)
RUN
H3-09
(0417)
H3-10
(0418)
H3-11
(0419)
RUN
H3-12
(041A)
RUN
H3-13
(041B)
H3-14
(041C)
H4-01
(041D)
H4-02
(041E)
RUN
Name Description
DI1 Function
Selection to DI7
Function Selection
NO,NC,CM
FuncSelection
DO1-O1C
FuncSelection
DO2-O2C Funct
Selection
AI1 Signal Level
Select
AI1 Function
Selection
AI1 Gain Setting Sets the gain of the analog signal input to MFAI terminal AI1.
AI1 Bias Setting Sets the bias of the analog signal input to MFAI terminal AI1.
AI2 Signal Level
Select
AI2 Function
Selection
AI2 Gain Setting Sets the gain of the analog signal input to MFAI terminal AI2.
AI2 Bias Setting Sets the bias of the analog signal input to MFAI terminal AI2.
An.In FilterTime
Constant
An.In Term.Enable Sel Sets the enabled terminal or terminals when H1-xx: MFDI Function Select = 12
AO An.Out Select Sets the monitor number to send from MFAO terminal AO.
AO An.Out Gain Sets the gain of the monitor signal that is sent from MFAO terminal AO.
Sets the functions for MFDI terminals DI1 to DI7.
Sets the function for MFDO terminal NO-CM, or NC-CM.
Sets the function for MFDO terminal DO1-O1C.
Sets the function for MFDO terminal DO2-O2C.
Sets the input signal level for MFAI terminal AI1.
0: 0 to 10V (Lower Limit at 0), 1: 0 to +10V (Without Lower Limit)
Sets a function for MFAI terminal AI1.
Sets the input signal level for MFAI terminal AI2.
0: 0 to 10V (Lower Limit at 0), 1: 0 to +10V (Without Lower Limit)
Sets a function for MFAI terminal AI2.
Sets the time constant to apply a primary delay filter to the MFAI terminal.
[AI Input Sel] is ON.
1: AI1 only, 2: AI2 only, 3: AI1 and AI2
14
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 15

1 English
No.
(Hex.)
H4-03
(041F)
RUN
H4-07
(0423)
L1-01
(0480)
L1-02
(0481)
L3-04
(0492)
L3-50
(0458)
Name Description
AO An.Out Bias Sets the bias of the monitor signal that is sent from MFAO terminal AO.
AO Signal Level
Select
Motor Cool Type for
OL1 Calc
OL1 Protect Time Sets the operation time for the electronic thermal protector of the drive to
StallP@Decel Enable Enables Stall Prevention during deceleration.
StallP@Decel Mode Sets the method that the drive will use to prevent overvoltage faults when
Sets the MFAO terminal AO output signal level.
1: 0 to 10 Vdc, 2: -10 to +10 Vdc, 3: 4 to 20 mA
Sets the motor overload protection with electronic thermal protectors.
0: Disabled, 1: VTorque, 2: CT 10:1 Speed Range, 3: CT 100:1 SpeedRange,
4: PM VTorque, 5: PM CTorque, 6: VT (50Hz)
prevent damage to the motor. Usually it is not necessary to change this setting.
0: Disabled, 1: Enabled
decelerating.
0: General Purpose, 1: Automatic Decel Reduction,
2: Gen Purpose w/ DB Resistor, 3: HiFlux Overexcitation,
4: HiFlux2 Overexcitation, 6: HiFlux3 Overexcitation
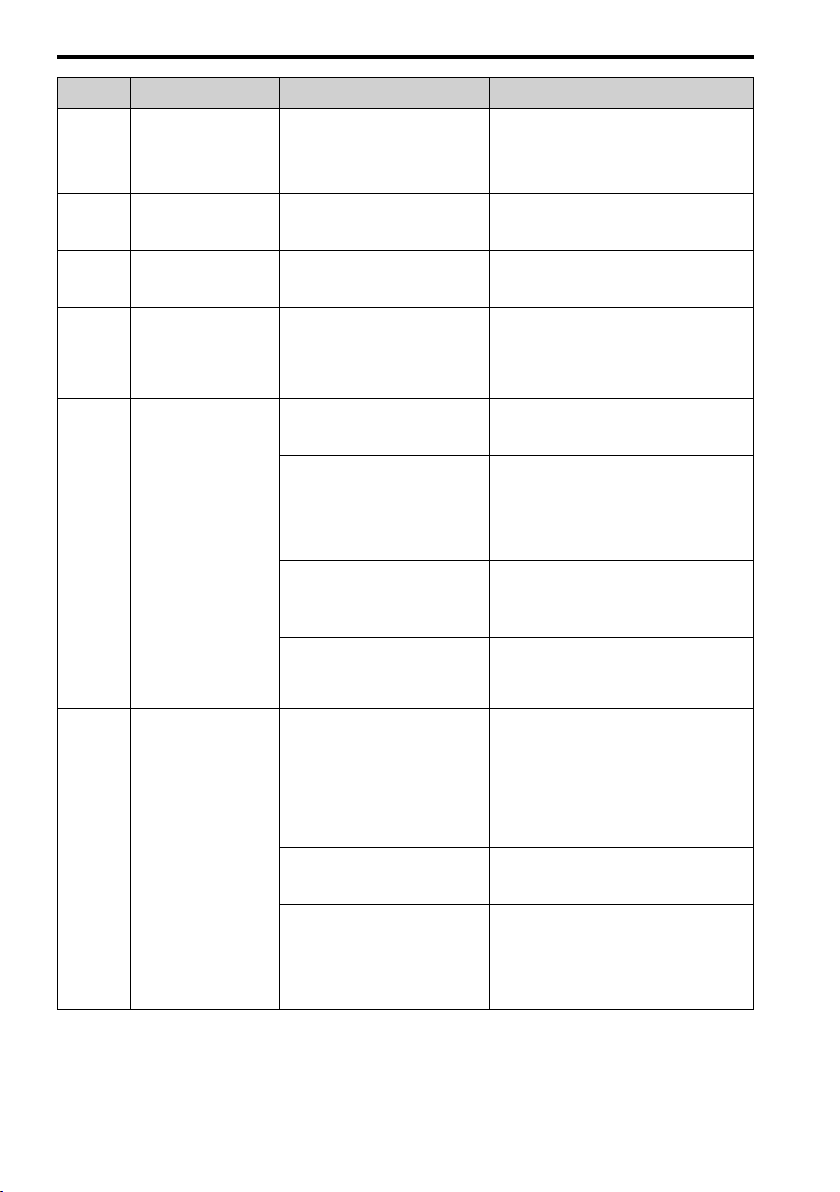
◆ Troubleshooting
If the drive or motor do not operate correctly, look at the drive keypad for fault and alarm
information.
• For drive faults:
– The keypad shows the fault code.
– The ALM LED illuminates continuously.
– The drive shuts off output, and the output terminal set for Fault [H2-01 to H2-03 = 3]
activates. The motor coasts to stop.
• For drive alarms:
– The keypad shows the alarm code.
– The ALM LED flashes.
– The drive will continue to operate the motor. Some alarms let you select a motor stopping
method.
■ Fault Reset
1. Remove the cause of the fault or alarm.
2. While the keypad is showing the fault or alarm code, push on the keypad.
This table lists the most frequent faults and alarms with possible causes and solutions. Refer to
the Technical Manual for a full list of faults and alarms.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
15
Page 16
1 English
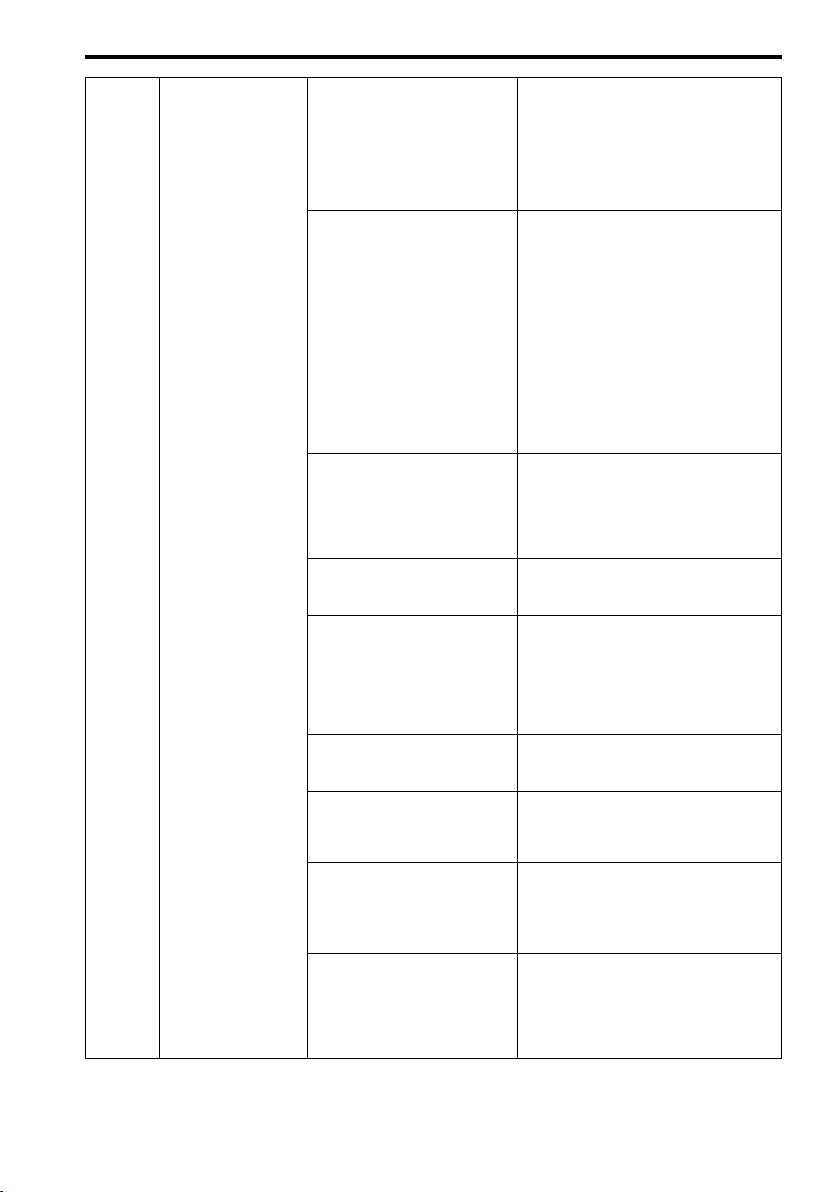
Code Name Causes Possible Solutions
bb Baseblock
CrST Cannot Reset
FWD/REV Run
EF
Command Input Error
EF1 to
External Fault
EF7
(Terminal DIx)
GF Ground Fault
oC Overcurrent
An external baseblock command
was entered through MFDI
terminal DI1 to DI7, and the drive
output stopped as shown by an
external baseblock command.
The drive received a fault reset
command when a Run command
was active.
A forward command and a reverse
command were input at the same
time for longer than 500 ms.
One of the digital inputs caused an
external fault through an external
device.
The digital input settings are
incorrect.
Overheating caused damage to the
motor or the motor insulation is
not satisfactory.
The motor main circuit cable is
contacting ground to make a short
circuit.
An increase in the stray
capacitance of the cable and the
ground terminal caused an
increase in the leakage current.
There was a problem with the
drive hardware.
The load is too heavy. • Measure the current flowing into the
Overheating caused damage to the
motor or the motor insulation is
not satisfactory.
The motor main circuit cable is
contacting ground to make a short
circuit.
Examine the external sequence and timing
of the baseblock command input.
Turn off the Run command then de-energize
and re-energize the drive.
Make sure that the sequence is correct. Do
not set the forward and reverse inputs at the
same time.
• Find the device that caused the external
faults. Remove the cause and reset the
fault.
• Make sure that the digital input terminal
functions are correct.
Measure the motor insulation resistance, and
replace the motor if there is electrical
conduction or unserviceable insulation.
• Examine the motor main circuit cable for
damage, and repair short circuits.
• Measure the resistance between the
motor main circuit cable and the ground
terminal. If there is electrical conduction,
replace the cable.
• If the wiring length of the cable is more
than 100 m, decrease the carrier
frequency.
• Decrease the stray capacitance.
Replace the control board or the drive. For
information about replacing the control
board, contact the manufacturer or your
nearest sales representative.
motor.
• Replace the drive with a larger capacity
model if the current value is more than
the drive rated current.
• Decrease the load or replace with a larger
drive to prevent sudden changes in the
current level.
Measure the motor insulation resistance, and
replace the motor if there is electrical
conduction or unserviceable insulation.
• Examine the motor main circuit cable for
damage, and repair short circuits.
• Measure the resistance between the
motor main circuit cable and the ground
terminal. If there is electrical conduction,
replace the cable.
16
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 17
1 English
A short circuit or ground fault on
the drive output side caused
damage to the output transistor of
the drive.
The acceleration time is too short. • Calculate the torque necessary during
The drive is trying to operate a
specialized motor or a motor that
is larger than the maximum
applicable motor output of the
drive.
A magnetic contactor was
switched at the output.
The V/f pattern settings are
incorrect.
The torque compensation gain is
too large.
Electrical interference caused a
problem.
The gain during overexcitation
operation is too large.
The drive received a Run
command while the motor was
coasting.
• Make sure that there is not a short circuit
in terminal B1 and terminals U/T1, V/
T2, and W/T3. Make sure that there is
not a short circuit in terminals - and
terminals U/T1, V/T2, and W/T3.
• If there is a short circuit, contact the
manufacturer or your nearest sales
representative.
acceleration related to the load inertia
and the specified acceleration time.
• Increase the values set in C1-01 [Accel
Time 1], C1-03 [Accel Time 2], C1-05
[Accel Time 3], or C1-07 [Accel Time 4]
until you get the necessary torque.
• Increase the values set in C2-01
[Jerk@Start of Accel], C2-02
[Jerk@End of Accel], C2-03
[Jerk@Start of Decel], and C2-04
[Jerk@End of Decel] until you get the
necessary torque.
• Replace the drive with a larger capacity
model.
• Examine the motor nameplate, the motor,
and the drive to make sure that the drive
rated current is larger than the motor
rated current.
• Replace the drive with a larger capacity
model.
Set the operation sequence to not turn ON or
OFF the magnetic contactor while the drive
is outputting voltage.
• Examine the ratios between the V/f
pattern frequency and voltage. Decrease
the voltage if it is too high compared to
the frequency.
• Adjust V/f Pattern Parameters E1-04 to
E1-10. For motor 2, adjust E3-04 to E3-
10.
Decrease the value set in C4-01 [Trq Comp
Gain] to make sure that the motor does not
stall.
Examine the control circuit lines, main
circuit lines, and ground wiring, and
decrease the effects of electrical
interference.
• Find the time when the fault occurs.
• If the fault occurs at the same time as
overexcitation operation, decrease the
value set in n3-13 [OverExcBr Gain] and
consider the motor flux saturation.
• Examine the sequence and input the Run
command after the motor fully stops.
• Set b3-01 = 1 [SpSrch@Start Selection
= Enabled] or set H1-xx = 67, 68 [Speed
Srch 1 or 2] to input speed search
commands from the MFDI terminals.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
17
Page 18

1 English
oL1 Motor Overload
The motor code is set incorrectly
for PM Control Methods.
If the drive detects the fault at start
or in the low speed range (10% or
less) and n8-57 = 1 [High-Freq
Injection = Enabled] for PM
Control methods, the high
frequency injection gain is too
high.
The current flowing in the motor is
more than the value set in L8-27
[OverCurr Det Gain] for PM
Control.
The control method is set
incorrectly for the motor.
The motor main circuit cable is too
long.
Speed search does not complete at
start when you use an induction
motor in EZOLV control.
The load is too heavy. Decrease the load.
The acceleration/deceleration
times or cycle times are too short.
Overload occurred while running
at low speed.
L1-01 [Motor Cool Type for OL1
Calc] is set incorrectly.
• Enter the correct motor code to E5-01
[PM Mot Code Selection] as specified by
the PM motor.
• For specialized motors, refer to the motor
test report and set E5: PM MOTOR
SETTINGS correctly.
• Set E5: PM MOTOR SETTINGS
correctly or do Rotational Auto-Tuning.
• Decrease the value of n8-41 [HFI
PoleDet Pgain] in 0.5 unit increments.
Note:
Set n8-41 > 0.0 for IPM motors.
Correct the value set in L8-27.
Set A1-02 [Control Method] correctly.
Replace the drive with a larger capacity
model.
When E9-01 = 0 [Motor Type Selection =
IM], set b3-24 = 2 [SpSrch Method
Selection = Current Det2].
Note:
Reset oL1 when U4-16
[MotorOLEstimate (oL1)] < 100.
• Examine the acceleration/deceleration
times and the motor start/stop
frequencies (cycle times).
• Increase the value set in Acceleration/
Deceleration Times C1-01 to C1-08.
• Lower the load when running at low
speed.
• Increase the motor speed.
• If the motor is run frequently at low
speeds, replace the motor with a larger
motor or use a drive-dedicated motor.
Note:
For general-purpose motors, overload
can occur while running at low speed
when operating at below the rated
current.
Set L1-01 in as specified by the motor
qualities for a drive-dedicated motor.
18
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 19

1 English
oL2 Drive Overload
The V/f pattern does not fit the
motor qualities.
E1-06 [Base Frequency] is set
incorrectly.
One drive is operating more than
one motor.
The electronic thermal protector
qualities and the motor overload
properties do not match.
The electronic thermal protector is
operating at an incorrect level.
There is increased motor loss from
overexcitation operation.
The speed search-related
parameters are set incorrectly.
Phase loss in the input power
supply is causing the output
current to change.
The load is too heavy. Decrease the load.
The acceleration/deceleration
times or cycle times are too short.
• Examine the ratios between the V/f
pattern frequency and voltage. Decrease
the voltage if it is too high compared to
the frequency.
• Adjust V/f Pattern Parameters E1-04 to
E1-10. For motor 2, adjust E3-04 to E3-
10. Decrease the values set in E1-08
[Mid A Voltage] and E1-10 [Min Output
Voltage].
Note:
If E1-08 and E1-10 are set too low, the
overload tolerance will decrease at low
speeds.
Set E1-06 to the rated frequency shown on
the motor nameplate.
Set L1-01 = 0 [Motor Cool Type for OL1
Calc = Disabled], connect thermal overload
relay to each motor to prevent damage to the
motor.
• Examine the motor qualities and set L1-
01 [Motor Cool Type for OL1 Calc]
correctly.
• Connect a thermal overload relay to the
motor.
Set E2-01 [Mot Rated Current (FLA)] to the
value shown on the motor nameplate.
• Lower the value set in n3-13 [OverExcBr
Gain].
• Set L3-50 ≠ 3 or 4 [StallP@Decel Mode
≠ HiFlux Overexcitation or HiFlux2
Overexcitation].
• Set L3-04 = 0 [StallP@Decel Enable =
Disabled].
• Examine the settings for all speed search
related parameters.
• Adjust b3-03 [SpSrch Deceleration
Time].
• Set b3-24 = 1 [SpSrch Method Selection
= Speed Estimation] after Auto-Tuning.
Make sure that there is no phase loss, and
repair problems.
• Examine the acceleration/deceleration
times and the motor start/stop
frequencies (cycle times).
• Increase the value set in Acceleration/
Deceleration Times C1-01 to C1-08.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
19
Page 20

1 English
ov Overvoltage
The V/f pattern does not fit the
motor qualities.
The drive capacity is too small. Replace the drive with a larger capacity
Overload occurred while running
at low speed.
The torque compensation gain is
too large.
The speed search-related
parameters are set incorrectly.
Phase loss in the input power
supply is causing the output
current to change.
Deceleration time is too short and
regenerative energy is flowing
from the motor into the drive.
The acceleration time is too short. • Make sure that sudden drive acceleration
The braking load is too large. Connect a dynamic braking option to the
• Examine the ratios between the V/f
pattern frequency and voltage. Lower the
voltage if it is too high compared to the
frequency.
• Adjust V/f Pattern Parameters E1-04 to
E1-10. Lower the values set in E1-08
[Mid A Voltage] and E1-10 [Min Output
Voltage] For motor 2, adjust E3-04 to
E3-10.
Note:
If E1-08 and E1-10 are set too low, the
overload tolerance is will decrease at
low speeds.
model.
• Decrease the load when running at low
speed.
• Replace the drive with a larger capacity
model.
• Decrease the value set in C6-02 [Carrier
Frequency Selection].
Decrease the value set in C4-01 [Trq Comp
Gain] to make sure that the motor does not
stall.
• Examine the settings for all speed search
related parameters.
• Adjust b3-03 [SpSrch Deceleration
Time].
• Set b3-24 = 1 [SpSrch Method Selection
= Speed Estimation] after Auto-Tuning.
• Correct any wiring errors in the main
circuit drive input power.
• Make sure that there is no phase loss, and
repair problems.
• Set L3-04 = 1 [StallP@Decel Enable =
Enabled] and L3-50 = 0 [StallP@Decel
Mode = General Purpose].
• Increase the values set in C1-02 [Decel
Time 1], C1-04 [Decel Time 2], C1-06
[Decel Time 3], or C1-08 [Decel Time
4].
• Connect a dynamic braking option to the
drive.
• Perform Deceleration Rate Auto-Tuning.
does not cause the fault.
• Increase the values set in C1-01 [Accel
Time 1], C1-03 [Accel Time 2], C1-05
[Accel Time 3], or C1-07 [Accel Time 4].
• Increase the value set in C2-02
[Jerk@End of Accel].
• Set L3-11 = 1 [Overvolt Supression
Select = Enabled].
drive.
20
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 21

1 English
There are surge voltages in the
input power supply.
The drive output cable or motor is
shorted to ground (the current
short to ground is charging the
main circuit capacitor of the drive
through the power supply).
If the drive detects ov in these
conditions, the speed searchrelated parameters are incorrect:
• During speed search
• During momentary power loss
recovery
• When the drive starts again
automatically
The power supply voltage is too
high.
The braking resistor or braking
resistor unit wiring is incorrect.
The encoder cable is disconnected
or wired incorrectly.
Noise interference along the
encoder cable.
Electrical interference caused a
drive malfunction.
The load inertia is set incorrectly. • Examine the load inertia settings with
The Short Circuit Braking function
used in OLV/PM control method.
Connect a DC reactor to the drive.
Note:
If you turn the phase advancing
capacitors ON and OFF and use
thyristor converters in the same power
supply system, there can be surge
voltages that irregularly increase the
input voltage.
1. Examine the motor main circuit cable,
terminals, and motor terminal box, and
then remove ground faults.
2. Re-energize the drive.
• Examine the settings for all speed search
related parameters.
• Set b3-19 ≠ 0 [Speed Retry Times ≠ 0
times].
• Adjust b3-03 [SpSrch Deceleration
Time] settings.
• Do Stationary Auto-Tuning for Line-to-
Line Resistance and then set b3-24 = 1
[SpSrch Method Selection = Speed
Estimation].
Decrease the power supply voltage to match
the drive rated voltage.
Correct wiring errors in the connection to
the braking resistor or braking resistor unit.
Examine for wiring errors or disconnected
wires in the encoder cable, and repair
problems.
Isolate the encoder cable from the drive
output line or a different source of electrical
interference.
• Examine the control circuit lines, main
circuit lines, and ground wiring, and
decrease the effects of electrical
interference.
• Make sure that a magnetic contactor is
not the source of the electrical
interference, then use a Surge Protective
Device if necessary.
KEB, overvoltage suppression, or stall
prevention during deceleration.
• Adjust L3-25 [Load Inertia Ratio] to
match the qualities of the machine.
Connect a braking resistor to the drive.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
21
Page 22

1 English
PF Input Phase Loss
STo Safe Torque OFF
Safe Torque OFF
SToF
Hardware
There is motor hunting. • Adjust n1-02 [HuntPrev Gain Setting]
Speed search does not complete at
start when you use an induction
motor in EZOLV control.
There is a phase loss in the drive
input power.
Loose wiring in the input power
terminals.
The drive input power voltage is
changing too much.
Unsatisfactory balance between
voltage phases.
The main circuit capacitors have
become unserviceable.
Safe Disable inputs H1-HC and
H2-HC are open.
There is internal damage to the
two Safe Disable channels.
One of the two terminals H1-HC
or H2-HC received the Safe
Disable input signal.
The Safe Disable input signal is
wired incorrectly.
There is internal damage to one
Safe Disable channel.
settings.
• Adjust n2-02 [AFR Time 1] and n2-03
[AFR Time 2] settings.
• Adjust n8-45 [SpdFbck Det.Gain] and
n8-47 [Pull-In Comp.Time Constant]
settings.
When E9-01 = 0 [Motor Type Selection =
IM], set b3-24 = 2 [SpSrch Method
Selection = Current Det2].
Correct errors with the wiring for main
circuit drive input power.
Tighten the terminal screws to the correct
tightening torque.
• Examine the input power for problems.
• Make the drive input power stable.
• Examine the input power for problems.
• Make the drive input power stable.
• If the input power supply is good,
examine the magnetic contactor on the
main circuit side for problems.
• Examine the capacitor maintenance time
in monitor U4-05 [Capacitor
Maintenance].
• If U4-05 is more than 90%, replace the
capacitor. Contact the manufacturer or
your nearest sales representative for
more information.
• Examine the input power for problems.
• Re-energize the drive.
• If the alarm stays, replace the circuit
board or the drive. Contact the
manufacturer or your nearest sales
representative for more information.
• Make sure that the Safe Disable signal is
input from an external source to terminal
H1-HC and H2-HC.
• When the Safe Disable function is not in
use, connect terminals H1-HC and H2HC.
Replace the board or the drive. For
information about replacing the control
board, contact the manufacturer or your
nearest sales representative.
• Make sure that the Safe Disable signal is
input from an external source to terminal
H1-HC and H2-HC.
• When the Safe Disable function is not in
use, connect terminals H1-HC and H2HC.
Replace the control board or the drive. For
information about replacing the control
board, contact the manufacturer or your
nearest sales representative.
22
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 23

1 English
◆ Disposal
■ Disposal Instructions
Correctly dispose the drive and packing material as specified by applicable regional, local, and
municipal laws and regulations.
■ WEEE Directive
The wheelie bin symbol on this product, its manual, or its packaging identifies that you must
recycle it at the end of its product life.
You must discard the product at an applicable collection point for electrical and electronic
equipment (EEE). Do not discard the product with usual waste.
◆ European Standards
Figure 1.4 CE Mark
The CE Mark identifies that the product meets environmental and safety standards in the
European Union. Products manufactured, sold, or imported in the European Union must display
the CE Mark.
European Union standards include standards for electrical appliances (Low Voltage Directive),
standards for electrical noise (EMC Directive), and standards for machinery (Machinery
Directive).
This product displays the CE Mark in accordance with the Low Voltage Directive, the EMC
Directive, and the Machinery Directive.
Table 1.4 Harmonized Standard
European Directive Harmonized Standard
CE Low Voltage Directive Compliance
2014/35/EU
EMC Directive
2014/30/EU
Machinery Directive
2006/42/EC
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
IEC/EN 61800-5-1:2007
EN 61800-3 2004+A1:2012
• EN ISO 13849-1:2015 (Cat. 3, PL e)
• IEC 62061:2005/A2:2015 (SILCL3)
• EN 62061:2005/A2:2015 (SILCL3)
• IEC/EN 61800-5-2:2007 (SIL3)
23
Page 24

1 English
■ CE Low Voltage Directive Compliance
This product is tested according to IEC/EN 61800-5-1:2007 and complies with the CE Low
Voltage Directive. The following conditions must be satisfied for machines and devices
incorporating this product to comply with the CE Low Voltage Directive.
■ Area of Use
Install this product in a location with overvoltage category III and pollution degree 2 or less.
These standards are defined by IEC/EN 60664.
■ Connect a Fuse to the Input Side (Primary Side)
The drive circuit protection must comply with IEC/EN 61800-5-1:2007 for protection against a
short circuit in the internal circuitry. Connect a semiconductor protection fuse on the input side
for branch circuit protection.
Refer to Factory Recommended Branch Circuit Protection on page 42.
WARNING
devices after the drive blows a fuse or trips an RCM/RCD. Wait for the time specified on the warning label at a
minimum and make sure that all indicators are OFF. Then check the wiring and peripheral device ratings to find
the cause of the problem. Contact the manufacturer before energizing the drive or peripheral devices if the cause
is not known. Failure to obey can cause death or serious injury and damage to the drive.
Electrical Shock Hazard. Do not immediately energize the drive or operate peripheral
■ EMC Directive
All drives were tested in accordance with European standard IEC/EN 61800-3:2004/A1:2012,
and comply with the EMC Directive.
Use drives with built-in EMC filters or install external EMC filters to the drive input side to
comply with the EMC Directive.
■ Install a Drive to Conform to the EMC Directive
Install drives with this procedure to comply with the EMC Directive when the drive is a single
unit or installed in a larger device.
1. Install the drive on a grounded metal plate.
2. Wire the drive and motor.
3. Move the EMC switch screw or screws to the OFF position for networks that are not
symmetrically grounded, ungrounded or grounded with high resistance.
24
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 25

4. Ground the wire shielding on the drive side and motor side.
1 English
A - Drive
B - Maximum wiring length
2xxx, 4xxx: 20 m (65.6 ft.)
maximum
Bxxx: 10 m (32.8 ft.)
maximum
C - Motor
D - Metal conduit
E - Grounding wire
Figure 1.5 Wiring the Drive and Motor
5. Use a cable clamp to ground the motor cable to the metal plate.
Note:
Make sure that the protective ground wire complies with technical specifications and local safety standards.
6. Connect an AC or DC reactor to decrease harmonic distortion.
Note:
To maintain compliance with IEC/EN 61000-3-2 on drive models 2004, 2006, 4002, and 4004, install a DC
reactor.
■ Enable/Disable the Internal EMC Filter
Move the screw or screws to turn ON and OFF (enable and disable) the EMC filter.
WARNING
LED light is OFF before you move the EMC filter screw or screws. Failure to obey could cause death or serious
injury.
WARNING
energized. Failure to obey can cause death or serious injury.
WARNING
EMC Directive before turning on the EMC filter or if there is high resistance grounding. If the EMC filter is
switched ON without the neutral point being grounded or if there is high resistance grounding, it can cause death
or serious injury.
WARNING
death or serious injury.
Make sure that the symmetric grounding network is applied, and install the screw or screws in
the ON position to enable the built-in EMC filter in compliance with the EMC Directive.
Electrical Shock Hazard. Make sure that the power to the drive is OFF and the CHARGE
Electrical Shock Hazard. Do not remove covers or touch circuit boards while the drive is
Electrical Shock Hazard. Ground the neutral point on the power supply to comply with the
Electrical Shock Hazard. Connect the ground cable correctly. Failure to obey can cause
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
25
Page 26

1 English
Figure 1.6 Symmetric Grounding
NOTICE
asymmetric grounding network, install the screw or screws in the OFF position to disable the built-in EMC filter.
Failure to obey the instructions can damage the drive.
NOTICE
to the specified torque. Completely removing the screws or tightening the screws to an incorrect torque may
cause drive failure.
When operating the drive with a non-grounding network, high resistance grounding,
When disabling the internal EMC filter, move the screws from ON to OFF and then tighten
If you lose an EMC filter switch screw, install the correct size screw with the correct tightening
torque.
NOTICE
B001 - B004, 2001 - 2006 M3 × 16
B006 - B012, 2010 - 2021, 4001 - 4012 M3 × 20
2030 - 2082, 4018 - 4060 M4 × 20
Only use the screws specified in this manual. Failure to obey could damage the drive.
Table 1.5 Screw Sizes and Tightening Torques
Model Screw Size
Tightening Torque
N∙m (in∙lb)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
1.2 - 1.5
(10.6 - 13.3)
◆ Safe Disable Input
Figure 1.7 TUV Mark
The TUV mark identifies that the product complies with the safety standards.
This section gives precautions to support the Safe Disable input. Contact the manufacturer for
more information.
26
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 27

1 English
Table 1.6 Applied Safety Standards and Unified Standards
Safety Standards Unified Standards
IEC/EN 61508:2010 (SIL3)
Functional Safety
Machine Safety
EMC
Low Voltage Directive
IEC/EN 62061/A2:2015 (SILCL3)
IEC/EN 61800-5-2:2007 (SIL3)
ISO/EN ISO 13849-1:2015 (Cat.3, PL e)
IEC/EN 61000-6-7:2015
IEC/EN 61326-3-1:2017
IEC/EN 61800-5-1:2007
SIL = Safety Integrity Level.
■ Safe Disable Specifications
The Safe Disable input provides the stop function that complies with “Safe Torque Off” as
specified by IEC/EN 61800-5-2:2007. The Safe Disable input meets the requirements of EN
ISO 13849-1 and IEC/EN 61508. It also has a safety status monitor to detect safety circuit
errors.
When you install the drive as a component in a system, you must make sure that the system
complies with the applicable safety standards.
Table 1.7 Specifications for the Safety Function
Item Description
• Input: 2
Safe Disable input (H1, H2)
Input/output
Response time from opening the input to stopping
the drive output
Response time from opening H1 and H2 terminal
inputs to operating the EDM signal
Less frequent operation request
Failure
probability
Performance level
HFT (hardware fault tolerance) N = 1
Type of subsystem Type B
MTTF
D
DC
avg
Mission time 10 years
mode
Frequent operation request
mode or continuous mode
EDM = External Device Monitoring
Signal ON level: 18 Vdc to 28 Vdc
Signal OFF level: -4 Vdc to +4 Vdc
• Output: 1
MFDO safety monitor output for external device monitor (EDM)
3 ms or less
30 ms or less
PFD = 1.38E
PFH = 3.35E
The Safe Disable input complies with the performance level
requirements of EN ISO 13849-1.
High
Medium
-5
-9
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
27
Page 28

1 English
PFD = Probability of Failure on Demand
PFH = Probability of Dangerous Failure per Hour
■ Safe Disable Circuit
The Safe Disable circuit has two isolated channels (terminals H1 and H2) that stop the output
transistors. The input can use the internal power supply of the drive.
Set the EDM function to one of the MFDO terminals [H2-xx = E or 10E] to monitor the status
of the Safe Disable function. This is the “Safe Disable monitor output function”.
Figure 1.8 Safe Disable Function Wiring Example
■ Enabling and Disabling the Drive Output (“Safe Torque Off”)
Example of drive operation when as the drive changes from the "Safe Torque Off" status to
usual operation.
Figure 1.9 Safe Disable Operation
28
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 29

1 English
Switching from Usual Operation to “Safe Torque Off”
Turn OFF (open) safety input terminal H1 or H2 to enable the Safe Disable function. When the
Safe Disable function is enabled while the motor is operating, the drive output and motor torque
turn off and the motor always coasts to stop. The b1-03 [Stopping Method Selection] setting
does not have an effect on the stopping method.
The “Safe Torque Off” status is only possible with the Safe Disable function. Clear the Run
command to stop the drive. Turning off drive output (a baseblock condition) ≠ “Safe Torque
Off”.
Note:
A maximum of 3 ms will elapse from when terminals H1 or H2 shut off until the drive switches to the "Safe Torque
Off" status. Set the OFF status for terminals H1 and H2 to hold for at least 3 ms. The drive may not be able to switch to
the “Safe Torque Off” status if terminals H1 and H2 are only open for less than 3 ms.
Turn OFF terminals H1 and H2 after the motor fully stops. This will prevent the motor from coasting to stop during
usual operation.
Going from “Safe Torque Off” to Usual Operation
The safety input will only release when there is no Run command.
• During Stop:
When the Safe Disable function is triggered during stop, close the circuit between terminals
H1-HC and H2-HC to disable “Safe Torque Off”. Enter the Run command after the drive
stops correctly.
• During Run:
When the Safe Disable function is triggered during run, close the circuit between terminals
H1-HC and H2-HC to disable “Safe Torque Off” after clearing the Run command. Enter the
Stop command, then enter the Run command when terminals H1 and H2 are ON or OFF.
■ Safe Disable Monitor Output Function and Keypad Display
Information about the relation between the input channel status, Safety monitor output status,
and drive output status.
Table 1.8 Safe Disable Input and External Device Monitor (EDM) Terminal Status
Input Channel Status
Input 1
(H1-HC)
ON
(Close the
circuit)
OFF
(Open)
ON
(Close the
circuit)
OFF
(Open)
Input 2
(H2-HC)
ON
(Close the
circuit)
ON
(Close the
circuit)
OFF
(Open)
OFF
(Open)
Safety Monitor
Output Status
MFDO
Terminal
(H2-xx =
E)
OFF ON
OFF ON
OFF ON
ON OFF
MFDO
Terminal
(H2-xx =
10E)
Drive
Output
Status
Baseblock
(Drive
ready)
Safety
status
(STo)
Safety
status
(STo)
Safety
status
(STo)
Keypad
Display
Normally
displayed
SToF
(Flashing)
SToF
(Flashing)
STo
(Flashing)
LED
Status
ALM:
Flashing
RUN:
Flashing
ALM:
Flashing
RUN:
Flashing
RUN:
Flashing
MEMOBUS Register
0020H
bit C bit D
- 0 0
1 0
1 0
0 1
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
29
Page 30

2 Attachments
Safety Function Status Monitor
The drive Safety monitor output sends a feedback signal about the status of the Safety function.
The Safety monitor output is one of the possible settings available for the MFDO terminals. If
there is damage to the Safe Disable circuit, a controller (PLC or safety relay) must read this
signal as an input signal to hold the “Safe Torque Off” status. This will help verify the condition
of the safety circuit. Refer to the manual for the safety device for more information about the
Safety function.
It is possible to switch polarity of the Safety monitor output signal with the MFDO function
settings.
Keypad Display
If the two input channels are OFF (Open), the keypad will flash STo [Safe Torque OFF].
If there is damage to the Safe disable circuit or the drive, the keypad will flash SToF [Safe
Torque OFF Hardware] when one input channel is OFF (Open), and the other is ON (Short
circuit). When you use the Safe disable circuit correctly, the keypad will not show SToF.
If there is damage to the drive, the keypad will show SCF [Safety Circuit Fault] when the drive
detects a fault in the Safe disable circuit. Refer to the chapter on Troubleshooting for more
information.
■ Validating the Safe Disable Function
After you replace parts or do maintenance on the drive, first complete all necessary wiring to
start the drive, then test the Safe Disable input with these steps. Keep a record of the test results.
• When the two input channels are OFF (Open), make sure that the keypad flashes STo [Safe
Torque OFF], and make sure that the motor is not running.
• Monitor the ON/OFF status of the input channels and make sure that MFDO set to the EDM
function operates correctly.
If one or more of the these items are true, the ON/OFF status of the MFDO may not display
correctly on the keypad:
– Incorrect parameter settings.
– A problem with an external device.
– The external wiring has a short circuit or is disconnected.
– There is damage to the device.
Find the cause and repair the problem to correctly display the status.
• Make sure that the EDM signal operates during usual operation.
2 Attachments
UL Standards
◆
30
Figure 2.1 UL/cUL Mark
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 31

2 Attachments
The UL/cUL Mark indicates that this product satisfies stringent safety standards. This mark
appears on products in the United States and Canada. It shows UL approval, indicating that it
has been determined that the product complies with safety standards after undergoing strict
inspection and assessment. UL-approved parts must be used for all major components that are
built into electrical appliances that obtain UL approval.
This product has been tested in accordance with UL standard UL61800-5-1, and has been
verified to be in compliance with UL standards.
Machines and devices integrated with this product must satisfy the following conditions for
compliance with UL standards.
■ Area of Use
Installation Environment Overvoltage category III and pollution degree 2 or less (according to UL61800-5-1)
Ambient Temperature UL Type 1 enclosure: -10 °C to +40 °C (14 °F to 104 °F).
IP20 enclosure: -10 °C to +50 °C (14 °F to 122 °F).
■ Wire the Main Circuit Terminal Block
Wire the main circuit terminal block correctly as specified by the instructions in the manual.
Comply with local standards for correct wire gauges in the region where the drive is used.
To select the correct wire gauge, refer to Main Circuit Wire Gauges and Tightening Torques on
page 44.
WARNING
IEC/EN 61800-5-1: 2007 standard specifies that users must wire the power supply to automatically turn off when
the protective ground wire disconnects. Users can also connect a protective ground wire that has a minimum
cross-sectional area of 10 mm
cause death or serious injury.
WARNING
braking resistor, to terminals +1, +2, -, B1, and B2. Failure to obey can cause serious injury or death.
Notes on Wiring the Main Circuit Terminal Block
• Use UL-Listed, vinyl-coated insulated copper wires for operation with a continuous
maximum permitted temperature of 75 °C at 600 V
• Remove all unwanted objects that are near the terminal block connections.
• Remove the insulation from the connection wires to the wire stripping lengths shown in the
manual.
• Do not use bent or crushed wires. Remove the damaged end of the wire before you use it.
Incorrect connections can cause death or serious injury from fire.
• Do not solder stranded wire. Soldered wire connections can become loose over time and
cause unsatisfactory drive performance.
• If you use stranded wire, make sure that all of the wire strands are in the connection. Also, do
not twist the stranded wire too much. Incorrect connections can cause death or serious injury
from fire.
• Put the wire all the way into the terminal block. Remove the insulation from the wire to the
recommended wire stripping length to fit the wire with insulation in the plastic housing.
• Use a torque driver, torque ratchet, or torque wrench for the screws. A slotted driver or a hex
tool will be necessary to wire the screw clamp terminal. Use applicable tools as specified by
the recommended conditions in the product manual.
• If you use power tools to tighten the terminal screws, use a low speed setting (300 to 400 r/
min). Failure to obey can cause damage to the terminal screws.
Electrical Shock Hazard. The leakage current of the drive will be more than 3.5 mA. The
2
(copper wire) or 16 mm2(aluminum wire). Failure to obey these standards can
Electrical Shock Hazard. Only connect peripheral options, for example a DC reactor or
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
31
Page 32

2 Attachments
• Wire gauges on existing drive models to be replaced may not match wire gauge ranges on
new drives. Refer to the Technical Manual for correct wire gauges.
• Do not tighten the terminal screws at an angle of 5 degrees or more. Failure to obey can cause
damage to the terminal screws.
Figure 2.2 Permitted Angle
• Put the bit all the way into the hex socket to tighten the hex socket cap screw.
• When tightening slotted screws, hold the straight-edge screwdriver perpendicularly to the
screw. Do not allow the tip of the screwdriver to shift or protrude from the groove of the
screw.
Figure 2.3 Tightening Slotted Screws
• After connecting the wires to the terminal block, lightly pull on the wires to make sure that
they do not come out of the terminals.
• Remove the correct section of the wiring cover to make wiring easier.
• Do not let strain on the wiring cause damage. Use a strain relief near the wiring to release the
tension.
A - Strain relief
Figure 2.4 Strain Relief Example
32
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 33

2 Attachments
Table 2.1 Recommended Wiring Tools
Screw
M3
M4
*1
M5
M6
*1 When wiring drive models 2042, 2056, 4031, 4038, 4044, and 4060, select the correct tools for the wire gauge.
*2 Use 6.35 mm (0.25 in) bit socket holder.
*3 Use a torque wrench that can apply this torque measurement range.
Model Manufacturer
SF-BIT-SL
0,5X3,0-70
SF-BIT-SL
1,0X4,0-70
SF-BIT-SL
1,2X6,5-70
SF-BIT-HEX 5-50
Bit
PHOENIX
CONTACT
PHOENIX
CONTACT
PHOENIX
CONTACT
PHOENIX
CONTACT
Torque Driver Model
(Tightening Torque)
TSD-M 1,2NM
(0.3 - 1.2 N∙m)
TSD-M 3NM
(1.2 - 3 N∙m)
Wire Gauge
2
≤ 25 mm
(AWG 10):
TSD-M 3NM
(1.2 - 3 N∙m)
Wire Gauge
2
≥ 30 mm
(AWG 8):
-
- 5 - 9 N∙m
Torque Wrench
-
-
Wire Gauge
2
≤ 25 mm
(AWG 10):
-
Wire Gauge
2
≥ 30 mm
(AWG 8):
4.1 - 4.5 N∙m
*2 *3
*2 *3
■ Factory-Recommended Branch Circuit Protection for UL Listing
Use branch circuit protection to protect against short circuits and to maintain compliance with
UL61800-5-1. We recommend connecting semiconductor protection fuses on the input side for
branch circuit protection. Refer to Factory Recommended Branch Circuit Protection on page 42
for the recommended fuses.
WARNING
devices after the drive blows a fuse or trips an RCM/RCD. Wait for the time specified on the warning label at a
minimum and make sure that all indicators are OFF. Then check the wiring and peripheral device ratings to find
the cause of the problem. Contact the manufacturer before energizing the drive or peripheral devices if the cause
is not known. Failure to obey can cause death or serious injury and damage to the drive.
• 200 V class
Use the fuses specified in this document to prepare the drive for use on a circuit that supplies
not more than 31,000 RMS symmetrical amperes and 240 Vac when there is a short circuit in
the power supply.
• 400 V class
Use the fuses specified in this document to prepare the drive for use on a circuit that supplies
not more than 31,000 RMS symmetrical amperes and 480 Vac when there is a short circuit in
the power supply.
The built-in short circuit protection of the drive does not provide branch circuit protection. The
user must provide branch circuit protection as specified by the National Electric Code (NEC),
the Canadian Electric Code, Part I (CEC), and local codes.
Electrical Shock Hazard. Do not immediately energize the drive or operate peripheral
■ Low Voltage Wiring for Control Circuit Terminals
You must provide low voltage wiring as specified by the National Electric Code (NEC), the
Canadian Electric Code, Part I (CEC), and local codes. The NEC class 1 circuit conductor is
recommended. Use the UL approved class 2 power supply for external power supply.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
33
Page 34

2 Attachments
Table 2.2 Control Circuit Terminal Power Supplies
Input/Output Terminals Power Supply Specifications
Digital input DI1-DI7, DIC, D0V, D24V
Analog input +10V, AI1, AI2, A0V
Analog output AO, A0V
Pulse train output PO, A0V
Pulse train input PI, A0V
Safe disable input H1, H2, HC
Serial communication input/output RS485+, RS485-, A0V
24 V external power supply E24V, A0V
Uses the LVLC power supply in the
drive.
Use the UL Listed class 2 power
supply for external power supply.
Uses the LVLC power supply in the
drive.
Use the UL Listed class 2 power
supply for external power supply.
Uses the LVLC power supply in the
drive.
Uses the LVLC power supply in the
drive.
Use the UL Listed class 2 power
supply for external power supply.
Uses the LVLC power supply in the
drive.
Use the UL Listed class 2 power
supply for external power supply.
Uses the LVLC power supply in the
drive.
Use the UL Listed class 2 power
supply for external power supply.
Uses the LVLC power supply in the
drive.
Use the UL Listed class 2 power
supply for external power supply.
Use the UL Listed class 2 power
supply.
■ Drive Motor Overload and Overheat Protection
The drive motor overload and overheat protection function complies with the National Electric
Code (NEC) and the Canadian Electric Code, Part I (CEC).
Set the Motor Rated Current and L1-01 through L1-04 [Motor Cool Type for OL1 Calc through
Motor oH FLT Reaction Select] correctly to enable motor overload and overheat protection.
Refer to the control method and set the motor rated current with E2-01 [Mot Rated Current
(FLA)], E5-03 [PM Mot Rated Current (FLA)], or E9-06 [Motor Rated Current].
E2-01 Mot Rated Current (FLA)
Default
(Range)
04 and C6-01
(10% to 200% of
the drive rated
current)
34
No.
(Hex.)
E2-01
(030E)
Name Description
Mot Rated Current
(FLA)
Sets the motor rated current in amps. Determined by o2-
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 35

2 Attachments
Note:
• If E2-01 < E2-03 [Mot No-Load Current] the drive will detect oPE02 [Parameter Range Setting Error].
• The default settings and setting ranges are in these units:
–0.01 A: 2001 to 2042, B001 to B018, 4001 to 4023
–0.1 A: 2056 to 2082, 4031 to 4060
The value set for E2-01 becomes the reference value for motor protection, the torque limit, and
torque control. Enter the motor rated current as written on the motor nameplate. Auto-Tuning
the drive will automatically set E2-01 to the value input for T1-04 [Motor Rated Current].
E5-03 PM Mot Rated Current (FLA)
No.
(Hex.)
E5-03
(032B)
Note:
When the drive model changes, the display units for this parameter also change.
• 0.01 A: 2001 to 2042, B001 to B018, 4001 to 4023
• 0.1 A: 2056 to 2082, 4031 to 4060
Name Description
PM Mot Rated
Current (FLA)
Sets the PM motor rated current (FLA). Determined by
Default
(Range)
E5-01
(10% to 200% of
the drive rated
current)
The drive automatically sets E5-03 to the value input for T2-06 [PMMot Rated Current] after
you do these types of Auto-Tuning:
• PM Motor Parameter Settings
• PM Stationary Auto-Tuning
• PM StaTun for Stator Resistance
• PM Rotational Auto-Tuning
E9-06 Motor Rated Current
No.
(Hex.)
E9-06
(11E9)
Note:
When the drive model changes, the display units for this parameter also change.
• 0.01 A: 2001 to 2042, B001 to B018, 4001 to 4023
• 0.1 A: 2056 to 2082, 4031 to 4060
Name Description
Motor Rated
Current
Sets the motor rated current in amps. Determined by
Default
(Range)
E9-01 and o2-04
(10% to 200% of
the drive rated
current)
The setting value of E9-06 is the reference value for motor protection. Enter the motor rated
current shown on the motor nameplate. Auto-Tuning the drive will automatically set E9-06 to
the value input for T4-07 [Motor Rated Current].
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
35
Page 36

2 Attachments
L1-01 Motor Cool Type for OL1 Calc
No.
(Hex.)
L1-01
(0480)
Name Description
Motor Cool Type
for OL1 Calc
Sets the motor overload protection with electronic thermal
protectors.
Default
(Range)
Determined by
A1-02
(0 - 6)
This parameter enables and disables the motor overload protection with electronic thermal
protectors.
The cooling capability of the motor changes when the speed control range of the motor changes.
Use an electronic thermal protector that aligns with the permitted load characteristics of the
motor to select motor protection.
The electronic thermal protector of the drive uses these items to calculate motor overload
tolerance and supply overload protection for the motor:
• Output current
• Output frequency
• Motor thermal characteristics
• Time characteristics
If the drive detects motor overload, the drive will trigger an oL1 [Motor Overload] and stop the
drive output.
Set H2-01 = 4D [NO,NC,CM FuncSelection = Motor OL1] to set a motor overload alarm. If the
motor overload level is more than 90% of the oL1 detection level, the output terminal turns ON
and triggers an overload alarm.
0 : Disabled
Disable motor protection when motor overload protection is not necessary or when the drive is
operating more than one motor.
Refer to Figure 2.5 for an example of the circuit configuration to connect more than one motor
to one drive.
Figure 2.5 Protection Circuit Configuration to Connect More than One Motor to One Drive
NOTICE
current of the motor is much larger than rated current of a standard motor, you cannot protect the motor with
electronic thermal protection. To protect each motor, set L1-01 =1 [Motor Cool Type for OL1 Calc = VTorque],
configure the circuits, then add thermal relays to each motor. The magnetic contactor installed for motor
protection cannot be switched ON/OFF during run. Failure to obey can cause motor failure.
36
When one drive is operating more than one motor at the same time or when the rated
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 37

2 Attachments
1 : VTorque
Use this setting for general-purpose motors with a 60 Hz base frequency.
The overload tolerance decreases as motor speed decreases because the cooling fan speed
decreases and the ability of the motor to cool decreases in the low speed range.
The overload tolerance characteristics of the motor change the trigger point for the electronic
thermal protector. This provides motor overheat protection from low speed to high speed across
the full speed range.
Load Tolerance Cooling Capability
This motor is designed to operate with
commercial line power. Operate at a 60
Hz base frequency to maximize the
motor cooling ability.
Overload Characteristics
(at 100% motor load)
If the motor operates at frequencies less
than 60 Hz, the drive will detect oL1.
The drive triggers a fault relay output
and the motor coasts to stop.
2 : CT 10:1 Speed Range
Use this setting for drive-dedicated motors with a speed range for constant torque of 1:10.
The speed control for this motor is 10% to 100% when at 100% load. Operating slower than
10% speed at 100% load will cause motor overload.
Load Tolerance Cooling Capability
This motor is designed to withstand
increased temperatures during
continuous operation in the low speed
range (10% base frequency).
Overload Characteristics
(at 100% motor load)
The motor operates continuously at
10% to 100% base frequency.
Operating slower than 10% speed at
100% load will cause motor overload.
3 : CT 100:1 SpeedRange
Use this setting for vector motors with a speed range for constant torque of 1:100.
The speed control for this motor is 1% to 100% when at 100% load. Operating slower than 1%
speed at 100% load will cause motor overload.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
37
Page 38

2 Attachments
Load Tolerance Cooling Capability
This motor is designed to withstand
increased temperatures during
continuous operation in the low speed
range (1% base frequency).
Overload Characteristics
(at 100% motor load)
The motor operates continuously at 1%
to 100% base frequency. Operating
slower than 1% speed at 100% load
will cause motor overload.
4 : PM VTorque
Use this setting for PM motors with derated torque characteristics.
The overload tolerance decreases as motor speed decreases because the cooling fan speed
decreases and the ability of the motor to cool decreases in the low speed range.
The overload tolerance characteristics of the motor change the trigger point for the electronic
thermal protector. This provides motor overheat protection from low speed to high speed across
the full speed range.
Load Tolerance Cooling Capability
This motor is designed to withstand
increased temperatures during
continuous operation at rated speed and
rated torque.
Overload Characteristics
(at 100% motor load)
If the motor operates continuously at
lower speed than rated rotation speed at
more than 100% torque, the drive will
detect oL1. The drive triggers a fault
relay output and the motor coasts to
stop.
5 : PM CTorque
Use this setting with a PM motor for constant torque that has a speed range for constant torque
of 1:500.
The speed control for this motor is 0.2% to 100% when at 100% load. Operating slower than
0.2% speed at 100% load will cause motor overload.
Load Tolerance Cooling Capability
This motor is designed to withstand
increased temperatures during
continuous operation in the low speed
range (0.2% base frequency).
Overload Characteristics
(at 100% motor load)
The motor operates continuously at
0.2% to 100% rated speed. Operating
slower than 0.2% speed at 100% load
will cause motor overload.
6 : VT (50Hz)
38
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 39

2 Attachments
Use this setting for general-purpose motors with a 50 Hz base frequency.
The overload tolerance decreases as motor speed decreases because the cooling fan speed
decreases and the ability of the motor to cool decreases in the low speed range.
The overload tolerance characteristics of the motor change the trigger point for the electronic
thermal protector. This provides motor overheat protection from low speed to high speed across
the full speed range.
Load Tolerance Cooling Capability
This motor is designed to operate with
commercial line power. Operate at a 50
Hz base frequency to maximize the
motor cooling ability.
Overload Characteristics
(at 100% motor load)
If the motor operates at frequencies less
than commercial line power, the drive
will detect oL1. The drive triggers a
fault relay output and the motor coasts
to stop.
L1-02 OL1 Protect Time
No.
(Hex.)
L1-02
(0481)
Name Description
OL1 Protect Time Sets the operation time for the electronic thermal protector of the
drive to prevent damage to the motor. Usually it is not necessary to
change this setting.
Default
(Range)
1.0 min
(0.1 - 5.0 min)
Set the overload tolerance time to the length of time that the motor can operate at 150% load
from continuous operation at 100% load.
When the motor operates at 150% load continuously for 1 minute after continuous operation at
100% load (hot start), the default setting triggers the electronic thermal protector.
Figure 2.6 shows an example of the electronic thermal protector operation time. Motor overload
protection operates in the range between a cold start and a hot start.
This example shows a general-purpose motor operating at the base frequency with L1-02 set to
1.0 min.
• Cold start
Shows the motor protection operation time characteristics when the overload occurs
immediately after starting operation from a complete stop.
• Hot start
Shows the motor protection operation time characteristics when overload occurs from
continuous operation below the motor rated current.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
39
Page 40

2 Attachments
Figure 2.6 Protection Operation Time for a General-purpose Motor at Rated Output
Frequency
L1-03 Motor oH AL Reaction Select
No.
(Hex.)
L1-03
(0482)
Name Description
Motor oH AL
Reaction Select
Sets drive operation when the PTC input signal entered into the
drive is at the oH3 [Motor Overheat Alarm] detection level.
Default
(Range)
3
(0 - 3)
0 : Ramp->Stop
The drive ramps the motor to stop in the deceleration time. Fault relay output terminal 1NO1CM turns ON and 1NC-1CM turns OFF.
1 : Coast->Stop
The output turns OFF and the motor coasts to stop. Fault relay output terminal 1NO-1CM turns
ON, and 1NC-1CM turns OFF.
2 : Fast Stop (C1-09)
The drive stops the motor in the deceleration time set in C1-09 [Fast Stop Time]. Fault relay
output terminal 1NO-1CM turns ON, and 1NC-1CM turns OFF.
3 : Alarm Only
The keypad shows oH3, and operation continues. The output terminal set for Alarm [H2-01 to
H2-03 = 4] turns ON.
L1-04 Motor oH FLT Reaction Select
No.
(Hex.)
L1-04
(0483)
Name Description
Motor oH FLT
Reaction Select
Sets the drive operation when the PTC input signal to the drive is
at the oH4 [Motor Overheat Fault (PTC Input)] detection level.
Default
(Range)
1
(0 - 2)
0 : Ramp->Stop
The drive ramps the motor to stop in the deceleration time. The output terminal set for Fault
[H2-01 to H2-03 = 3] activates.
40
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 41

2 Attachments
1 : Coast->Stop
The output turns OFF and the motor coasts to stop. The output terminal set for Fault [H2-01 to
H2-03 = 3] activates.
2 : Fast Stop (C1-09)
The drive stops the motor in the deceleration time set in C1-09 [Fast Stop Time]. The output
terminal set for Fault [H2-01 to H2-03 = 3] activates.
◆ China RoHS Compliance
Figure 2.7 China RoHS Mark
The China RoHS mark is displayed on products containing six specified hazardous substances
that are in excess of regulatory limits, based on the “Administrative Measures for the Restriction
of the Use of Hazardous Substances in Electrical and Electronic Products” and “Marking for the
Restricted Use of Hazardous Substances in Electronic and Electrical Products” (SJ/T 11364-
2014), which were promulgated on January 26, 2016. The number displayed in the center of the
mark indicates the environment-friendly use period (number of years) in which electrical and
electronic products that are being produced, sold, or imported to China can be used. The date of
manufacture of the electrical and electronic product is the starting date of the environmentfriendly use period for the product. The six specified hazardous substances contained in the
product will not leak outside of the product during normal use within this period and will have
no serious impact on the environment, the human body, or property.
The environment-friendly use period for this product is 15 years. This period is not the product
warranty period.
Table 2.3 Contents of Hazardous Substances in This Product
Hazardous Substances
Parts Name
Circuit Board × ○ ○ ○ ○ ○
Electronic Parts × ○ ○ ○ ○ ○
Brass Screw × ○ ○ ○ ○ ○
Aluminum Die
Casting
This table has been prepared in accordance with the provisions outlined in SJ/T 11364.
○: Indicates that said hazardous substance contained in all of the homogeneous materials for this part is below or equal to
the limit requirement of GB/T 26572.
×: Indicates that said hazardous substance contained in at least one of the homogeneous materials used for this part is
above the limit requirement of GB/T 26572.
Note:
This product complies with EU RoHS directives. In this table, "×" indicates that hazardous substances that are exempt
from EU RoHS directives are contained.
Lead (Pb) Mercury (Hg)
× ○ ○ ○ ○ ○
Cadmium
(Cd)
Hexavalent
Chromium
(Cr(VI))
Polybromina
ted
Biphenyls
(PBB)
Polybromina
ted Diphenyl
Ethers
(PBDE)
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
41
Page 42

2 Attachments
◆ 对应中国RoHS指令
图 2.8 中国RoHS标志
中国RoHS标志依据2016年1月26日公布的《电器电子产品有害物质限制使用管理办法》,以
及《电子电气产品有害物质限制使用标识要求》(SJ/T 11364-2014)作成。电子电气产品中
特定6种有害物质的含量超过规定值时,应标识此标志。中间的数字为在中国生产销售以及进
口的电子电气产品的环保使用期限(年限)。电子电气产品的环保使用期限从生产日期算起。
在期限内,正常使用产品的过程中,不会有特定的6种有害物质外泄进而对环境、人和财产造
成深刻影响。
本产品的环保使用期限为15年。但需要注意的是环保使用期限并非产品的质量保证期限。
表 2.4 本产品中有害物质的名称及含量
有害物质
部件名称
实装基板 × ○ ○ ○ ○ ○
电子元件 × ○ ○ ○ ○ ○
黄铜螺钉 × ○ ○ ○ ○ ○
铝压铸 × ○ ○ ○ ○ ○
本表格依据SJ/T 11364的规定编制。
○:表示该有害物质在该部件所有均质材料中的含量均在GB/T 26572规定的限量要求以下。
×:表示该有害物质至少在该部件的某一均质材料中的含量超出GB/T 26572规定的限量要求。
(注) 本产品符合欧盟RoHS指令。上表中的“×”表示含有欧盟RoHS指令豁免的有害物质。
铅(Pb) 汞(Hg) 镉(Cd) 六价铬(Cr(VI))
多溴联苯
(PBB)
多溴二苯醚
(PBDE)
◆ Factory Recommended Branch Circuit Protection
■ Three-Phase 200 V Class
Table 2.5 Factory-Recommended Branch Circuit Protection: Three-Phase 200 V Class
Semiconductor Protection Fuse Rated Current
Manufacturer: EATON/Bussmann
Model
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Input Rated Current
42
Time Delay Fuse
Drive Model
2001 3 FWH-25A14F 25
2002 6 FWH-25A14F 25
2004 6 FWH-25A14F 25
2006
2010 20 FWH-70B 70
Class J, T, and CC Fuse
Rated Current
A
10 FWH-25A14F 25
A
Page 43

2 Attachments
Time Delay Fuse
Drive Model
2012 25 FWH-70B 70
2021 40 FWH-90B 90
2030 - FWH-100B 100
2042 - FWH-150B 150
2056 - FWH-200B 200
2070 - FWH-200B 200
2082 - FWH-225A 225
Class J, T, and CC Fuse
Rated Current
A
Semiconductor Protection Fuse Rated Current
Manufacturer: EATON/Bussmann
Model
Input Rated Current
A
■ Single-Phase 200 V Class
Table 2.6 Factory-Recommended Branch Circuit Protection: Single-Phase 200 V Class
Time Delay Fuse
Drive Model
B001 3 FWH-25A14F 25
B002 6 FWH-25A14F 25
B004 10 FWH-60B 60
B006 15 FWH-80B 80
B010 25 FWH-100B 100
B012 30 FWH-125B 125
B018 - FWH-150B 150
Class J, T, and CC Fuse
Rated Current
A
Semiconductor Protection Fuse Rated Current
Manufacturer: EATON/Bussmann
Model
Input Rated Current
A
■ Three-Phase 400 V Class
Table 2.7 Factory-Recommended Branch Circuit Protection: Three-Phase 400 V Class
Time Delay Fuse
Drive Model
4001 3 FWH-40B 40
4002 6 FWH-40B 40
4004 10 FWH-50B 50
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Class J, T, and CC Fuse
Rated Current
A
Semiconductor Protection Fuse Rated Current
Manufacturer: EATON/Bussmann
Model
Input Rated Current
A
43
Page 44

2 Attachments
Time Delay Fuse
Drive Model
4005 10 FWH-70B 70
4007 15 FWH-70B 70
4009 20 FWH-90B 90
4012 25 FWH-90B 90
4018 - FWH-80B 80
4023 - FWH-100B 100
4031 - FWH-125B 125
4038 - FWH-175B 175
4044 - FWH-200B 200
4060 - FWH-200B 200
Class J, T, and CC Fuse
Rated Current
A
Semiconductor Protection Fuse Rated Current
Manufacturer: EATON/Bussmann
Model
◆ Main Circuit Wire Gauges and Tightening Torques
Symbol Screw
Hex bolt, cross-slotted
Symbol Screw
Input Rated Current
A
Hex socket cap
Hex bolt, slotted
Hex self locking nut
44
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Philips/slot combo
Slot
Page 45

■ Three-Phase 200 V Class
2 Attachments
Model Terminals
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
2001
-, +1, +2
2002
2004
2006
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
-, +1, +2
2010
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
-, +1, +2
2012
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
2021
-, +1, +2
B1, B2
Recommended
Gauge
2
mm
(AWG kcmil)
2.5
(14)
2.5
(14)
2.5
(14)
*2
2.5
(14)
2.5
(14)
2.5
(12)
2.5
(14)
*2
4
(10)
2.5
(12)
2.5
(10)
2.5
(14)
*2
4
(10)
4
(8)
2.5
(10)
6
(8)
2.5
(14)
6
(8)
Applicable
Gauge
2
mm
(AWG kcmil)
2.5
(14)
2.5
(14)
2.5
(14)
*2
2.5
(14)
2.5 - 4
(14 - 12)
2.5 - 4
(14 - 10)
2.5 - 4
(14 - 12)
*2
2.5 - 6
(14 - 10)
2.5 - 4
(14 - 10)
2.5 - 4
(12 - 10)
2.5 - 4
(14 - 12)
*2
2.5 - 6
(14 - 10)
2.5 - 6
(14 - 8)
2.5 - 4
(14 - 8)
4 - 10
(14 - 8)
2.5 - 4
(14 - 10)
2.5 - 6
(14 - 8)
Wire
Stripping
Length
mm
6.5
6.5
6.5
-
8
8
8
-
8
8
8
-
10
10
10
10
-
Terminal Screw
*1
M3
M3
M3
M3.5
M3
M3
M3
M4
M3
M3
M3
M4
M4
M4
M4
M4
M4
Tightening
Torque
N∙m (lb.
∙in.)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.8 - 1.0
(7.1 - 8.9)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
1.2 - 1.5
(10.6 - 13.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
1.2 - 1.5
(10.6 - 13.3)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.2 - 1.5
(10.6 - 13.3)
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
45
Page 46

2 Attachments
Model Terminals
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
2030
-, +1, +2
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
2042
-, +1, +2
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
2056
-, +1, +2
B1, B2
Recommended
Gauge
2
mm
(AWG kcmil)
6
(8)
6
(8)
10
(6)
2.5
(12)
6
(8)
10
(6)
10
(6)
16
(4)
4
(10)
10
(6)
16
(4)
16
(4)
25
(2)
10
(8)
10
(6)
Applicable
Gauge
2
mm
(AWG kcmil)
4 - 10
(12 - 6)
4 - 10
(12 - 6)
2.5 - 16
(12 - 6)
2.5 - 4
(12 - 8)
6 - 16
(10 - 6)
2.5 - 16
(12 - 6)
2.5 - 16
(12 - 6)
4 - 25
(10 - 2)
2.5 - 6
(14 - 6)
6 - 16
(10 - 6)
4 - 25
(10 - 2)
4 - 25
(10 - 2)
6 - 35
(8 - 2)
4 - 16
(12 - 6)
10 - 25
(8 - 4)
Wire
Stripping
Length
mm
10
10
10
10
-
10
10
18
10
-
18
18
18
10
-
Terminal Screw
*1
M4
M4
M4
M4
M4
M4
M4
M5
M4
M5
M5
M5
M5
M4
M6
Tightening
Torque
N∙m (lb.
∙in.)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
2.0 - 2.5
(17.7 - 22.1)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
2.3 - 2.5
(19.8 - 22)
1.5 - 1.7
(13.5 - 15)
2.0 - 2.5
(17.7 - 22.1)
2.3 - 2.5
(19.8 - 22)
2.3 - 2.5
(19.8 - 22)
AWG 8 ≤
4.1 - 4.5
(36 - 40)
4.1 - 4.5
(36 - 40)
≤ 25 mm
2.3 - 2.5
(19.8 - 22)
1.5 - 1.7
(13.5 - 15)
5.4 - 6.0
(47.8 - 53.1)
2
46
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 47

2 Attachments
Recommended
Model Terminals
Gauge
mm
2
(AWG kcmil)
25
(2)
16
(2)
35
(1)
10
(8)
2070
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
-, +1, +2
B1, B2
16
(4)
35
(1)
25
(2)
50
(2/0)
16
(6)
2082
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
-, +1, +2
B1, B2
16
(4)
*1 Remove insulation from the ends of wires to expose the length of wire shown.
*2 If you turn on the internal EMC filter, the leakage current of the drive will be more than 3.5 mA. Use these closed-
loop crimp terminals or equivalent to connect a protective ground wire that has a minimum cross-sectional area of
2
10 mm
(copper wire).
Applicable
Gauge
2
mm
(AWG kcmil)
6 - 35
(6 - 1)
6 - 25
(8 - 1)
10 - 50
(6 - 1/0)
4 - 16
(12 - 6)
10 - 25
(6 - 4)
10 - 50
(6 - 1/0)
10 - 35
(6 - 1)
16 - 70
(2 - 2/0)
4 - 16
(10 - 6)
10 - 25
(6 - 4)
Wire
Stripping
Length
mm
20
20
20
10
-
20
20
20
10
-
Terminal Screw
*1
M6
M6
M6
M4
M6
M6
M6
M6
M4
M6
Tightening
Torque
N∙m (lb.
∙in.)
5 - 5.5
(45 - 49)
5 - 5.5
(45 - 49)
5 - 5.5
(45 - 49)
1.5 - 1.7
(13.5 - 15)
5.4 - 6.0
(47.8 - 53.1)
5 - 5.5
(45 - 49)
5 - 5.5
(45 - 49)
5 - 5.5
(45 - 49)
1.5 - 1.7
(13.5 - 15)
5.4 - 6.0
(47.8 - 53.1)
• 8-4NS from JST Mfg. Co., Ltd.
• R8-4S from NICHIFU Co.,Ltd.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
47
Page 48

2 Attachments
■ Single-Phase 200 V Class
Model Terminals
L/L1, N/L2
U/T1, V/T2, W/T3
B001
-, +1
B002
B004
B1, B2
L/L1, N/L2
U/T1, V/T2, W/T3
B006
-, +1, +2
B1, B2
L/L1, N/L2
U/T1, V/T2, W/T3
B010
-, +1, +2
B1, B2
Recommended
Gauge
2
mm
(AWG kcmil)
2.5
(14)
2.5
(14)
2.5
(14)
*2
2.5
(14)
2.5
(12)
2.5
(14)
2.5
(12)
2.5
(14)
*2
2.5
(10)
2.5
(10)
2.5
(14)
2.5
(10)
2.5
(14)
*2
2.5
(10)
Applicable
Gauge
2
mm
(AWG kcmil)
2.5
(14)
2.5
(14)
2.5
(14)
*2
2.5
(14)
2.5 - 4
(14 - 10)
2.5 - 4
(14 - 12)
2.5 - 4
(14 - 10)
2.5 - 6
(14 - 12)
*2
2.5 - 4
(14 - 10)
2.5 - 4
(12 - 10)
2.5 - 4
(14 - 12)
2.5 - 4
(12 - 10)
2.5 - 6
(14 - 12)
*2
2.5 - 4
(14 - 10)
Wire
Stripping
Length
mm
6.5
6.5
6.5
-
8
8
8
8
-
8
8
8
8
-
Terminal Screw
*1
M3
M3
M3
M3.5
M3
M3
M3
M3
M4
M3
M3
M3
M3
M4
Tightening
Torque
N∙m (lb.
∙in.)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.8 - 1.0
(7.1 - 8.9)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
1.2 - 1.5
(10.6 - 13.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
1.2 - 1.5
(10.6 - 13.3)
48
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 49

2 Attachments
Recommended
Model Terminals
Gauge
mm
2
(AWG kcmil)
(8)
2.5
(12)
(8)
2.5
(14)
4
4
4
*2
B012
L/L1, N/L2
U/T1, V/T2, W/T3
-, +1, +2
B1, B2
(10)
(8)
2.5
(10)
(8)
2.5
(14)
6
6
6
*2
B018
L/L1, N/L2
U/T1, V/T2, W/T3
-, +1
B1, B2
(8)
*1 Remove insulation from the ends of wires to expose the length of wire shown.
*2 If you turn on the internal EMC filter, the leakage current of the drive will be more than 3.5 mA. Use these closed-
loop crimp terminals or equivalent to connect a protective ground wire that has a minimum cross-sectional area of
2
10 mm
(copper wire).
Applicable
Gauge
2
mm
(AWG kcmil)
2.5 - 6
(14 - 8)
2.5 - 4
(14 - 10)
2.5 - 6
(14 - 8)
2.5 - 4
(14 - 12)
*2
2.5 - 6
(14 - 10)
2.5 - 10
(12 - 6)
2.5 - 4
(14 - 8)
2.5 - 10
(12 - 6)
2.5 - 4
(14 - 12)
*2
4 - 10
(12 - 8)
Wire
Stripping
Length
mm
10
10
10
10
-
10
10
10
10
-
Terminal Screw
*1
M4
M4
M5
M4
M4
M4
M4
M5
M4
M5
Tightening
Torque
N∙m (lb.
∙in.)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.2 - 1.5
(10.6 - 13.3)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
2.0 - 2.5
(17.7 - 22.1)
• 8-4NS from JST Mfg. Co., Ltd.
• R8-4S from NICHIFU Co.,Ltd.
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
49
Page 50

2 Attachments
■ Three-Phase 400 V Class
Model Terminals
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
-, +1, +2
4001
4002
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
4004
-, +1, +2
4005
4007
4009
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
4012
-, +1, +2
B1, B2
Recommended
Gauge
2
mm
(AWG kcmil)
2.5
(14)
2.5
(14)
2.5
(14)
*2
2.5
(14)
2.5
(14)
2.5
(14)
2.5
(14)
*2
2.5
(10)
2.5
(12)
2.5
(14)
2.5
(10)
2.5
(14)
*2
4
(10)
Applicable
Gauge
2
mm
(AWG kcmil)
2.5 - 4
(14 - 12)
2.5 - 4
(14 - 12)
2.5 - 4
(14 - 12)
*2
2.5 - 6
(14 - 10)
2.5 - 4
(14 - 12)
2.5 - 4
(14 - 12)
2.5 - 4
(14 - 12)
*2
2.5 - 6
(14 - 10)
2.5 - 4
(14 - 10)
2.5 - 4
(14 - 12)
2.5 - 4
(14 - 8)
2.5 - 4
(14 - 12)
*2
2.5 - 6
(14 - 10)
Wire
Stripping
Length
mm
8
8
8
-
8
8
8
-
10
10
10
10
-
Terminal Screw
*1
M3
M3
M3
M4
M3
M3
M3
M4
M4
M4
M4
M4
M4
Tightening
Torque
N∙m (lb.
∙in.)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
1.2 - 1.5
(10.6 - 13.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
0.5 - 0.6
(4.4 - 5.3)
1.2 - 1.5
(10.6 - 13.3)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.2 - 1.5
(10.6 - 13.3)
50
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 51

2 Attachments
Model Terminals
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
4018
-, +1, +2
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
4023
-, +1, +2
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
4031
-, +1, +2
B1, B2
Recommended
Gauge
2
mm
(AWG kcmil)
2.5
(10)
2.5
(10)
4
(10)
2.5
(14)
*2
4
(10)
4
(8)
4
(10)
4
(8)
2.5
(12)
*2
4
(10)
6
(8)
6
(8)
10
(6)
2.5
(10)
6
(8)
Applicable
Gauge
2
mm
(AWG kcmil)
2.5 - 4
(12 - 8)
2.5 - 4
(12 - 8)
2.5 - 6
(14 - 8)
2.5 - 4
(14 - 12)
*2
2.5 - 16
(14 - 6)
2.5 - 6
(14 - 6)
2.5 - 6
(14 - 8)
4 - 6
(12 - 6)
2.5 - 4
(14 - 10)
*2
4 - 16
(10 - 6)
4 - 10
(12 - 6)
4 - 10
(12 - 6)
2.5 - 16
(12 - 4)
2.5 - 4
(12 - 8)
6 - 16
(10 - 6)
Wire
Stripping
Length
mm
10
10
10
10
-
10
10
10
10
-
10
10
18
10
-
Terminal Screw
*1
M4
M4
M4
M4
M5
M4
M4
M4
M4
M5
M4
M4
M5
M4
M6
Tightening
Torque
N∙m (lb.
∙in.)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
2.0 - 2.5
(17.7 - 22.1)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
2.0 - 2.5
(17.7 - 22.1)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
2.3 - 2.5
(19.8 - 22)
AWG 8 ≤
4.1 - 4.5
(36 - 40)
1.5 - 1.7
(13.5 - 15)
5.4 - 6.0
(47.8 - 53.1)
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
51
Page 52

2 Attachments
Model Terminals
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
4038
-, +1, +2
B1, B2
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
4044
-, +1, +2
B1, B2
Recommended
Gauge
2
mm
(AWG kcmil)
10
(6)
6
(8)
16
(4)
4
(10)
10
(6)
16
(4)
10
(6)
16
(2)
6
(8)
10
(6)
Applicable
Gauge
2
mm
(AWG kcmil)
4 - 16
(12 - 6)
2.5 - 10
(12 - 6)
4 - 25
(10 - 2)
2.5 - 6
(14 - 6)
6 - 16
(10 - 6)
4 - 25
(10 - 2)
4 - 16
(12 - 4)
6 - 25
(8 - 2)
4 - 10
(12 - 6)
6 - 16
(10 - 6)
Wire
Stripping
Length
mm
10
10
18
10
-
18
18
18
10
-
Terminal Screw
*1
M4
M4
M5
M4
M6
M5
M5
M5
M4
M6
Tightening
Torque
N∙m (lb.
∙in.)
1.5 - 1.7
(13.5 - 15)
1.5 - 1.7
(13.5 - 15)
2.3 - 2.5
(19.8 - 22)
AWG 8 ≤
4.1 - 4.5
(36 - 40)
1.5 - 1.7
(13.5 - 15)
5.4 - 6.0
(47.8 - 53.1)
2.3 - 2.5
(19.8 - 22)
AWG 8 ≤
4.1 - 4.5
(36 - 40)
2.3 - 2.5
(19.8 - 22)
AWG 8 ≤
4.1 - 4.5
(36 - 40)
2.3 - 2.5
(19.8 - 22)
1.5 - 1.7
(13.5 - 15)
5.4 - 6.0
(47.8 - 53.1)
52
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
Page 53

2 Attachments
Applicable
Gauge
2
mm
(AWG kcmil)
Wire
Stripping
Length
mm
Terminal Screw
*1
Tightening
Torque
N∙m (lb.
∙in.)
Model Terminals
Recommended
Gauge
2
mm
(AWG kcmil)
4.1 - 4.5
(36 - 40)
≤ 25 mm
2.3 - 2.5
R/L1, S/L2, T/L3
(2)
25
6 - 35
(10 - 2)
18
M5
(19.8 - 22)
2.3 - 2.5
(19.8 - 22)
AWG 8 ≤
4.1 - 4.5
(36 - 40)
4060
U/T1, V/T2, W/T3
(4)
16
4 - 25
(6 - 2)
18
M5
4.1 - 4.5
(36 - 40)
≤ 25 mm
2.3 - 2.5
-, +1, +2
(2)
25
6 - 35
(6 - 2)
18
M5
(19.8 - 22)
B1, B2
10
(8)
10
(6)
*1 Remove insulation from the ends of wires to expose the length of wire shown.
*2 If you turn on the internal EMC filter, the leakage current of the drive will be more than 3.5 mA. Use these closed-
loop crimp terminals or equivalent to connect a protective ground wire that has a minimum cross-sectional area of
2
10 mm
(copper wire).
2.5 - 16
(12 - 6)
6 - 16
(10 - 6)
10
-
M4
M6
1.5 - 1.7
(13.5 - 15)
5.4 - 6.0
(47.8 - 53.1)
• 8-4NS from JST Mfg. Co., Ltd.
• R8-4S from NICHIFU Co.,Ltd.
2
2
TOEPYEUOQ2V03A AC Drive Q2V Installation and Operation Instructions
53
Page 54

Q2V
Driving Quality
Installation & Operation Instructions
Omron Office Addresses
OMRON EUROPE B.V.
Tel: +31 (0) 23 568 13 00
industrial.omron.eu
France
Tel: +33 (0) 1 56 63 70 00
industrial.omron.fr
Poland
Tel: +48 22 458 66 66
industrial.omron.pl
Switzerland
Tel: +41 (0) 41 748 13 13
industrial.omron.ch
In the event that the end user of this product is to be the military and said product is to be employed in any
weapons systems or the manufacture thereof, the export will fall under the relevant regulations as stipulated in
the Foreign Exchange and Foreign Trade Regulations. Therefore, be sure to follow all procedures and submit all
relevant documentation according to any and all rules, regulations and laws that may apply. Specifications are
subject to change without notice for ongoing product modifications and improvements.
Austria
Tel: +43 (0) 2236 377 800
industrial.omron.at
Germany
Tel: +49 (0) 2173 680 00
industrial.omron.de
Portugal
Tel: +351 21 942 94 00
industrial.omron.pt
Turkey
Tel: +90 212 467 30 00
industrial.omron.com.tr
Belgium
Tel: +32 (0) 2 466 24 80
industrial.omron.be
Hungary
Tel: +36 1 399 30 50
industrial.omron.hu
Russia
Tel: +7 495 648 94 50
industrial.omron.ru
United Kingdom
Tel: +44 (0) 1908 258 258
industrial.omron.co.uk
Czech Republic
Tel: +420 234 602 602
industrial.omron.cz
Italy
Tel: +39 02 326 81
industrial.omron.it
South Africa
Tel: +27 (0)11 579 2600
industrial.omron.co.za
More Omron representatives
industrial.omron.eu
Denmark
Tel: +45 43 44 00 11
industrial.omron.dk
Netherlands
Tel: +31 (0) 23 568 11 00
industrial.omron.nl
Spain
Tel: +34 902 100 221
industrial.omron.es
Original Instructions
© 2019 YASKAWA Europe GmbH
Finland
Tel: +358 (0) 207 464 200
industrial.omron.fi
Norway
Tel: +47 (0) 22 65 75 00
industrial.omron.no
Sweden
Tel: +46 (0) 8 632 35 00
industrial.omron.se
MANUAL NO. TOEP YEUOQ2V 03A
Revision A <0>-1
May 2020 (E24 correction)
Published in Germany
 Loading...
Loading...