

Omron JUSP-NS600 DATASHEET [de]
JUSP-NS600
Indexer-Baugruppe
Intelligente und einfache Positionierungslösung.
• Keine Programmiersprachen erforderlich.
Für direkten Anschluss von Servoantrieben der
Sigma-II-Serie
• Ermöglicht Steuerung über serielles Netzwerk und
einzelne E/A
• Konfiguration, Betrieb und Überwachung der
Servoachsen
• 128 programmierte Indexbewegungen
• Verfeinerte Methoden und Funktionen für intelligente Steuerung, wie z. B. Programmtabellen oder
Positions- und Geschwindigkeitstabellen
• Über das serielle Netzwerk können bis zu 16 Servos
angeschlossen werden
• Mit der Software SigmaWin+ kann das System
einfach konfiguriert werden
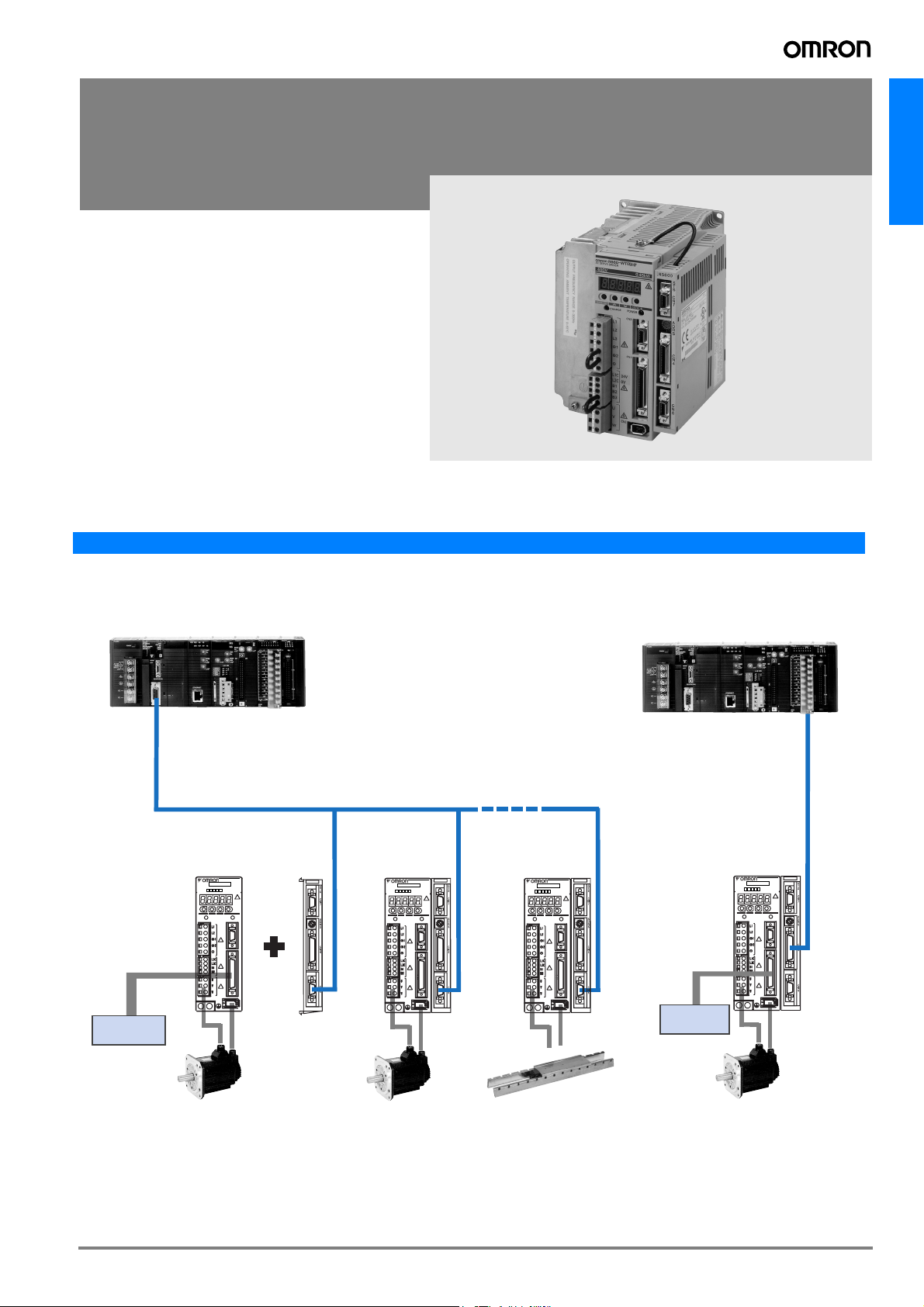
Systemkonfiguration
Motion Control
Verwendung serieller Kommunikation
Host-Controller
Steuert 16 Achsen über RS-485/RS-422
Sigma II-Serie
Endlagenschalter,
Kontaktsensoren
Servoantrieb
SGDH-
CHARGE POWER
CN2
JUSP-NS600
Indexer-Baugruppe
SERVOPACK
200VVer.
CN3
CN1
Sigma II-Serie
Servomotor
NS600
NS600
SERVOPACK
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CN2
SGDH-
Sigma-Serie
Linearmotor
CHARGE POWER
CN2
Verwendung digitaler E/A
SPS
NS600
NS600
SERVOPACK
200VVer.
CN3
CN1
Endlagenschalter,
Kontaktsensoren
SERVOPACK
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CN2
63Indexer-Baugruppe
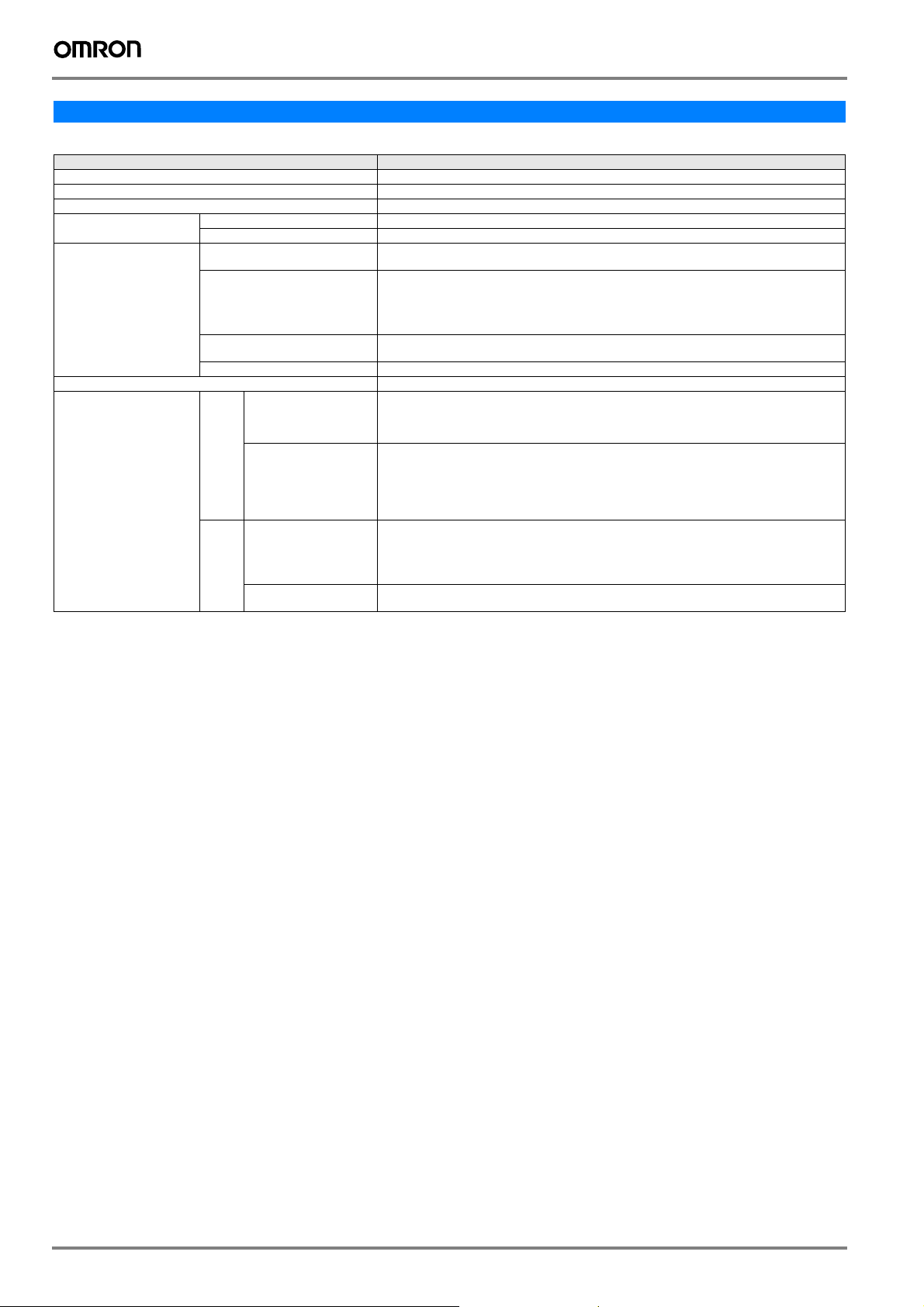
Technische Daten
JUSP-NS600 - Indexer-Baugruppe
Eigenschaft Spezifikationen
Produktbezeichnung JUSP-NS600
Geeigneter Servoantrieb Alle SGDH-E SERVOPACK-Modelle
Installationsmethode An der Seite des SGDH-Servoantriebs montiert: CN10.
Basis-Spezifikationen Spannungsversorgung Erfolgt über die Steuerspannungsversorgung des Servoantriebs.
Steuerspezifikationen Programmtabelle Programmtabellen-Positionierung durch Start über einen Kontakteingang
Weitere Funktionen Externe Positionierung, JOG-Geschwindigkeitstabellen-Betrieb (max. 16 Geschwindigkeiten)
E/A-Signale Eingang Servoantrieb S-ON (Servo EIN)
Leistungsaufnahme 2,6 W
Serielle Kommunikation Serielle Befehle in ASCII-Code
Sollwerttabelle Positionierung mittels Sollwerttabelle über den Kontakteingang
Nullpunktrückkehr 3 Arten
INDEXER-Modul MODE0/1 (Modussignal)
Aus-
Servoantrieb ALM (Servo-Alarm)
gang
INDEXER-Modul INPOSITION (Positionierung abgeschlossen)
(maximal 128 Schritte)
Kommunikations-Spezifikationen: RS422 / RS485 (max. 50 m)
Verbindung: Parallelschaltung (max. 16 Achsen)
Baudrate: 9600, 19200, 38400 Bit/s
(max. 128 Punkte)
P-OT (Vorwärtslauf gesperrt), N-OT (Rückwärtslauf gesperrt)
DEC (Nullpunktrückkehr-Verzögerung LS)
RTRG (Externes Positionierungssignal)
START/HOME (Startsignal / Ausführung der Nullpunktrückkehr)
PGMRES/JOGP (Programmrücksetzung / Motor-Vorwärtsdrehung)
SEL0/JOGN (Programmschritt Startbestimmung / Motor-Rückwärtsdrehung)
SEL1 bis SEL4 / JOG0 bis JOG3
Programmschritt Startbestimmung / JOG-Geschwindigkeitstabellenauswahl)
WARN (Warnung)
BK (Bremssperre)
S-RDY (Servo bereit)
ALO1, ALO2, ALO3 (Alarmcodes)
POUT0 bis POUT4 (programmierbare Ausgänge)
RS232C (max. 3 m)
64 Motion Control
 Loading...
Loading...