

Omron JUSP-NS600 DATASHEET [es]
JUSP-NS600
Unidad de posicionado
Solución de posicionado inteligente y simple.
• No se requieren lenguajes de programación.
Conexión directa con el servodriver de la
serie Sigma-II
• Permite el control de red serie y el control discreto
de E/S
• Configuración, accionamiento y monitorización de
ejes del servo
• 128 movimientos programados de posicionado
• Métodos y funciones sencillas para el control inteligente como tablas de programa o tablas de posición
y velocidad
• Se pueden conectar hasta 16 servos mediante
red serie
• El sistema se puede configurar fácilmente con el
Software SigmaWin+
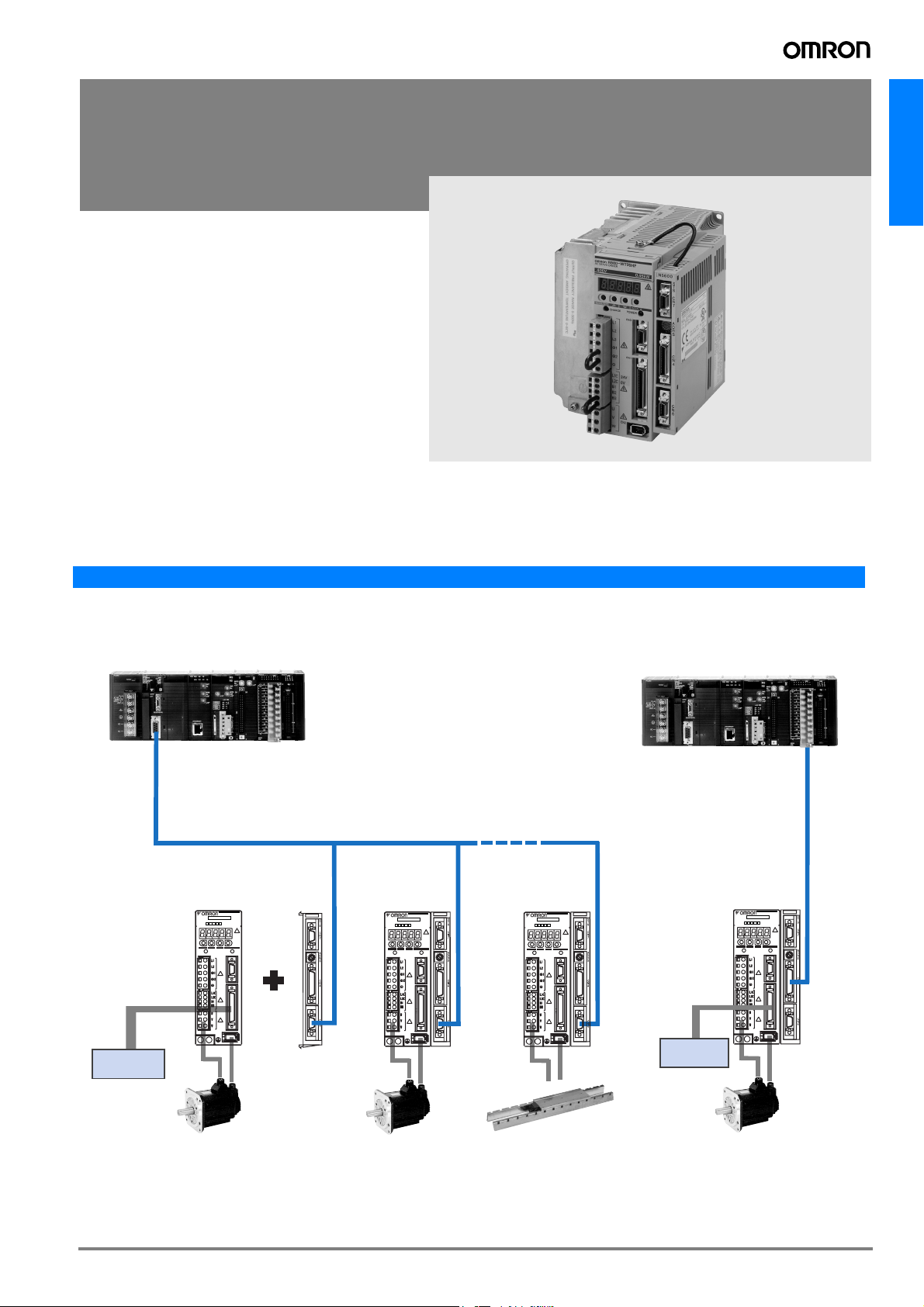
Control de movimiento
Configuración del sistema
Mediante comunicaciones serie
Controlador host
Controla 16 ejes mediante RS-485/RS-422
JUSP-NS600
Serie Sigma II
Servodriver
SGDH-
CHARGE POWER
CN3
CN1
SERVOPACK
200VVer.
Unidad de
posicionado
NS600
Mediante E/S digitales
PLC
NS600
SERVOPACK
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CHARGE POWER
NS600
SERVOPACK
200VVer.
CN3
CN1
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
SGDH-
NS600
SERVOPACK
Finales de
carrera, sensores
de contacto
CN2
Serie Sigma II
Servomotor
CN2
Serie Sigma
CN2
Finales de
carrera, sensores
de contacto
CN2
Motor lineal
63Unidad de posicionado
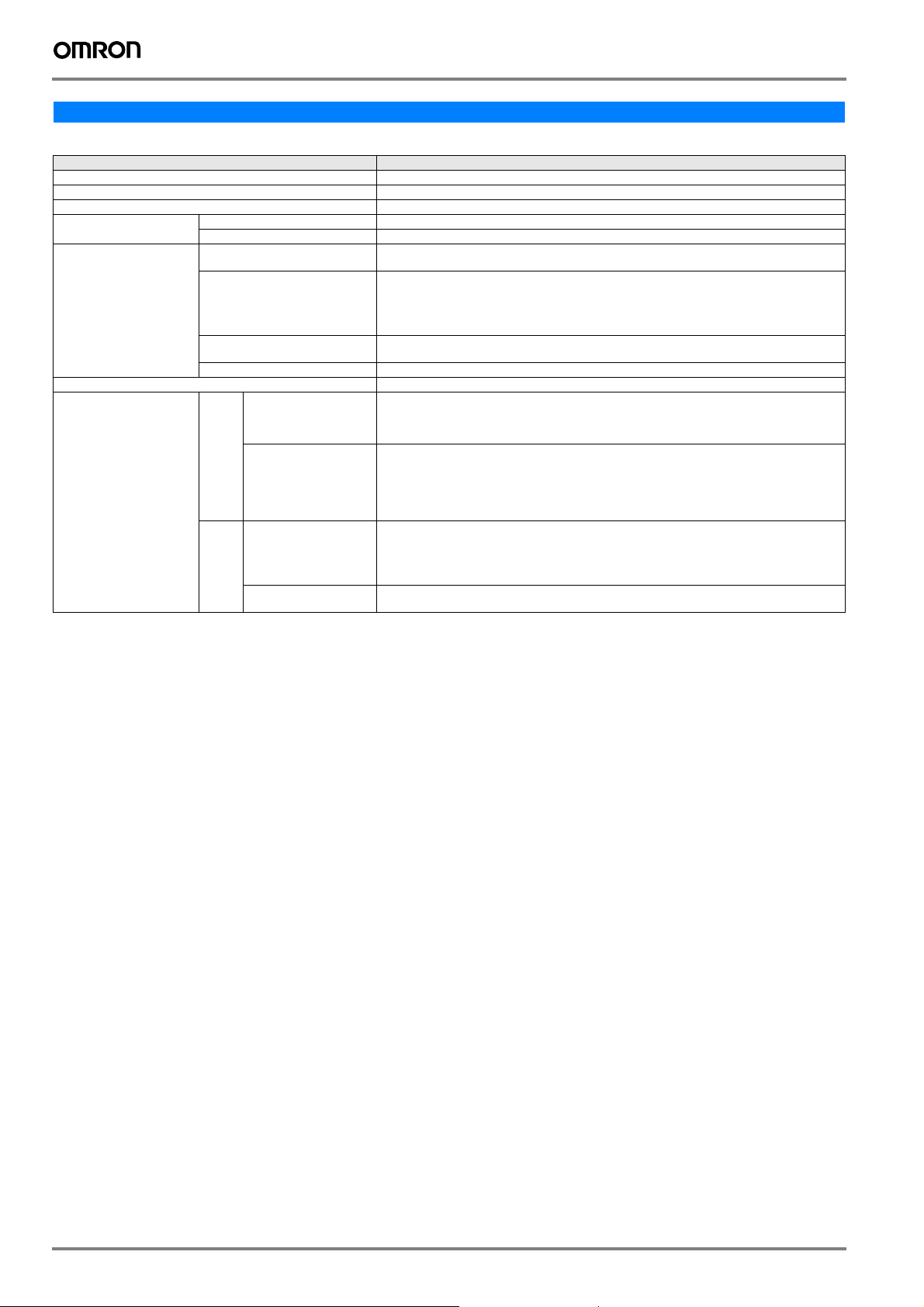
Especificaciones
JUSP-NS600 - Unidad de posicionado
Elemento Descripción
Tipo JUSP-NS600
Servodriver aplicable Todos los SERVODRIVER SGDH-E
Método de instalación Montado en el lateral del servodriver SGDH: CN10.
Especificaciones básicas Método de alimentación Suministrada desde la fuente de alimentación de control del servodriver
Especificaciones de control Tabla de programa Posicionado de tabla de programa mediante la indicación del paso inicial por las entradas digitales
Otras funciones Posicionado externo, operación de tabla de velocidades JOG (máximo 16 velocidades)
Señales de E/S Entrada Servodriver S-ON (Servo ON)
Consumo 2,6 W
Comunicaciones serie Comandos serie en códigos ASCII
Tabla de comandos Posicionado mediante la designación de la tabla de comandos por la entrada de contacto
Retorno a punto cero 3 tipos
Módulo de posicionado MODE0/1 (señal de modo)
Salida Servodriver ALM (alarma de servo)
Módulo de posicionado INPOSITION (posicionado finalizado)
(Máximo 128 pasos)
Especificaciones de comunicaciones: RS422 / RS485 (máximo 50 m)
Conexión: Método de multipunto (máximo 16 ejes)
Velocidad de transmisión: 9600, 19200, 38400 bps
(Máximo 128 puntos)
P-OT (marcha directa prohibida), N-OT (marcha inversa prohibida)
DEC (LS de deceleración de retorno a punto cero)
RTRG (señal de posicionado externa)
START/HOME (señal de inicio / retorno a punto cero)
PGMRES/JOGP (reset de programa / rotación directa del motor)
SEL0/JOGN (designación de paso de inicio de programa / rotación inversa del motor)
SEL1 a SEL4 / JOG0 a JOG3
(designación de paso de inicio de programa / selección de tabla de velocidades JOG)
WARN (advertencia)
BK (bloqueo del freno)
S-RDY (servo preparado)
ALO1, ALO2, ALO3 (códigos de alarma)
POUT0 a POUT4 (salidas programables)
RS232C (máximo 3 m)
64 Control de movimiento
 Loading...
Loading...