

Omron JUSP-NS600 User Manual
JUSP-NS600
Positionneur
Solution de positionnement simple et
intelligente.
• Aucun langage de programmation nécessaire
Connexion directe au servodriver série Sigma-II
• Permet le contrôle réseau série et le contrôle d’E/S
individuelle
• Configuration, actionnement et surveillance de l’axe
du servo
• 128 mouvements programmés d’indexation
• Méthodes et fonctions perfectionnées pour un contrôle intelligent telles que les tables de programmes
ou les tables de position et de vitesse
• Connexion possible jusqu’à 16 servos via le réseau
série
• Configuration facile du système grâce à SigmaWin+
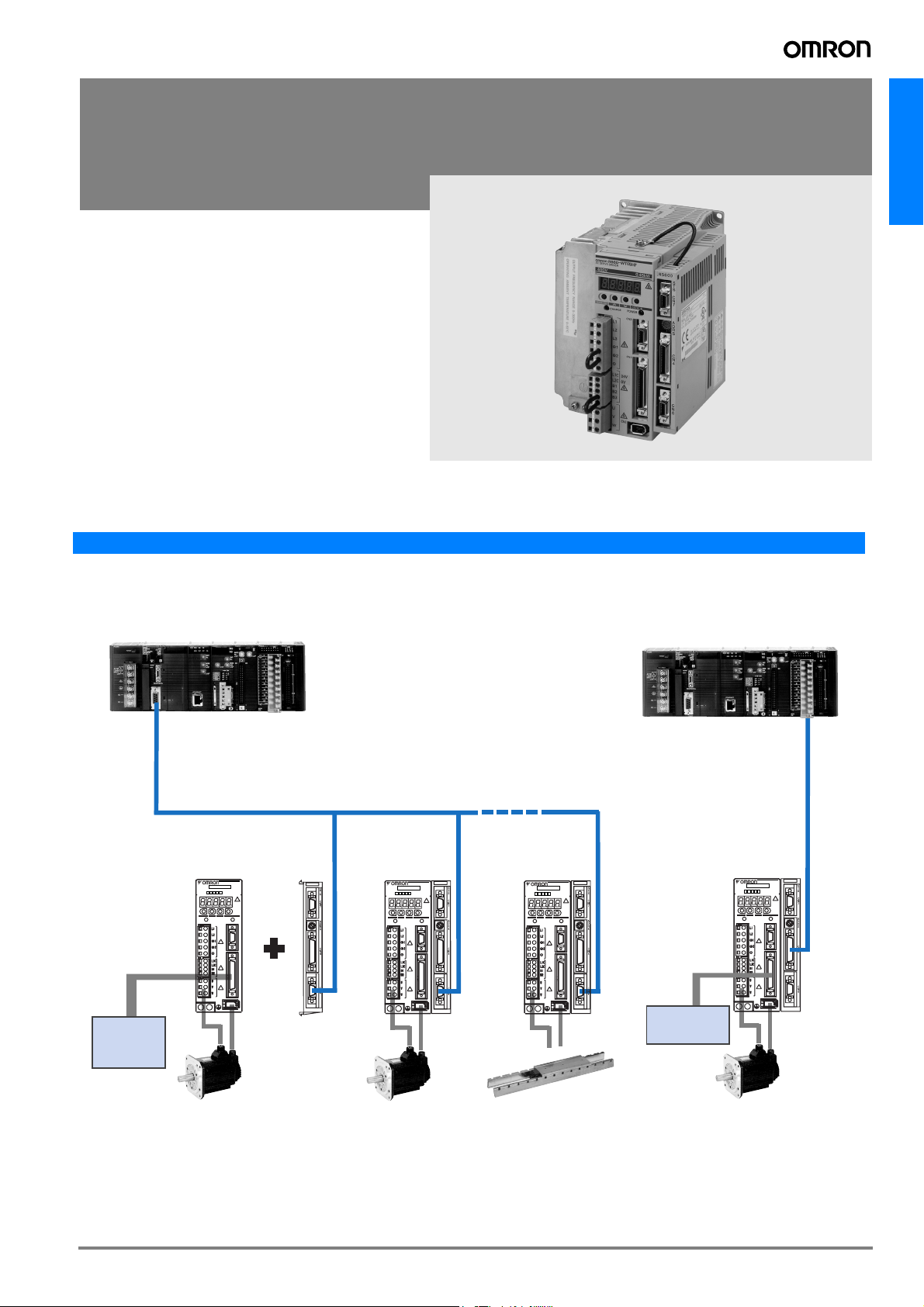
Configuration du système
Contrôle d’axes
Utilisation de communications série
Contrôleur hôte
Contrôle de 16 axes via le connecteur RS-485/RS-422
JUSP-NS600
Carte de
positionnement
200VVer.
Série Sigma-II
Servomoteur
NS600
SERVOPACK
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CN2
Série Sigma-II
Interrupteurs de
fin de course,
capteurs de
contact
Servodriver
SGDH-
CHARGE POWER
CN2
SERVOPACK
CN3
CN1
NS600
Série Sigma
Moteur linéaire
Utilisation d'E/S
numériques
API
NS600
NS600
SERVOPACK
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CN2
Interrupteurs de
fin de course,
capteurs de contact
SERVOPACK
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CN2
63Positionneur
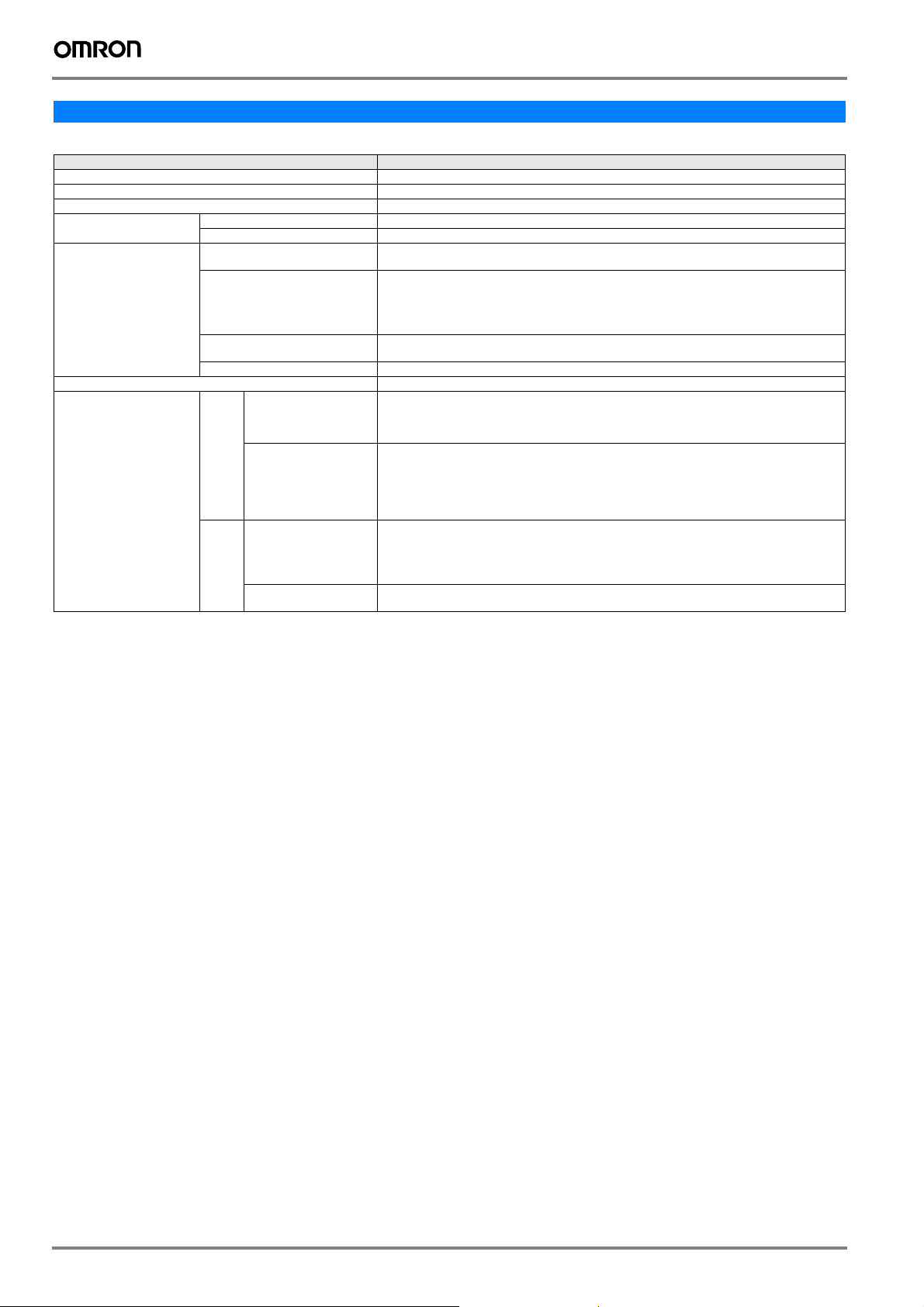
Caractéristiques techniques
JUSP-NS600 - Carte Positionneur
Détails
Type JUSP-NS600
Servodriver applicable Tous les SERVOPACKS SGDH-E
Méthode d'installation Monté sur le côté du servodriver SGDH : CN10.
Caractéristiques de base Alimentation Fournie par l’alimentation de contrôle du servodriver.
Spécifications de contrôle Table de programme Positionnement de la table de programmes par désignation du pas de démarrage par l’entrée
Autres fonctions Positionnement externe, fonctionnement de la table de vitesse JOG (maximum 16 vitesses)
Signaux d’E/S Entrée Servodriver S-ON (Servo ON)
Consommation 2,6 W
Communications série Commandes série en code ASCII
Table de commande Positionnement par désignation de la table de commande par entrée contact
Retour au point zéro 3 types
Module INDEXER MODE0/1 (Signal de mode)
Sortie Servodriver ALM (Alarme servo)
Module INDEXER INPOSITION (Positionnement terminé)
contact (maximum 128 pas)
Caractéristiques des communications RS422 / RS485 (Maximum 50 m)
Connexion : Méthode à branchement multiple (maximum 16 axes)
Vitesse : 9 600, 19 200, 38 400 bps
(maximum 128 points)
P-OT (marche avant interdite), N-OT (marche inverse interdite)
DEC (LS décélération pour retour au point zéro)
RTRG (signal de positionnement externe)
START/HOME (Signal de démarrage / exécution du retour au point zéro)
PGMRES/JOGP (Réinitialisation du programme / rotation avant du moteur)
SEL0/JOGN (Désignation du pas de démarrage du programme / rotation arrière du moteur)
SEL1 à SEL4 / JOG0 à JOG3
(Désignation du pas de démarrage du programme / Sélection de la table de vitesse JOG)
WARN (Avertissement)
BK (Verrouillage du frein)
S-RDY (Servo prêt)
ALO1, ALO2, ALO3 (Codes d’alarme)
POUT0 à POUT4 (Sorties programmables)
RS232C (Maximum 3 m)
64 Contrôle d’axes
 Loading...
Loading...