

Omron JUSP-NS600 DATASHEET

JUSP-NS600
Indexer unit
Smart and simple positioning solution.
• No programming languages are required. Connects
directly to the Sigma-II series drive
• Allows serial network control and discrete I/O
control
• Servo axis set-up, actuation and monitoring
• 128 indexing programmed moves
• Refined methods and functions for smart control
like program tables or position and speed tables
• Up to 16 servos can be connected via serial
network
• With SigmaWin+ the system can be easily
configured
System configuration
Using serial communications
Controls 16 axes through RS-485/RS-422
SERVOPACK
SGDH-
200V
Ver.
CHARGE POWER
CN3
CN1
Limit switches
contact sensors
CN2
CJ1/CS1 series
Host controller
Sigma-II
series
Servo Drive
Sigma-II series
Servo Motor
NS600
JUSP-NS600
Indexer unit
Using digital I/O
NS600
SERVOPACK
SGDH-
200V
Ver.
CHARGE POWER
CN3
CN1
CN2
NS600
SERVOPACK
SGDH-
200V
Ver.
CHARGE POWER
CN3
CN1
CN2
Sigma-II
series
NS600
SERVOPACK
SGDH-
200V
Ver.
CHARGE POWER
CN3
CN1
CN2
Linear Motor
111Indexer unit
Specifications
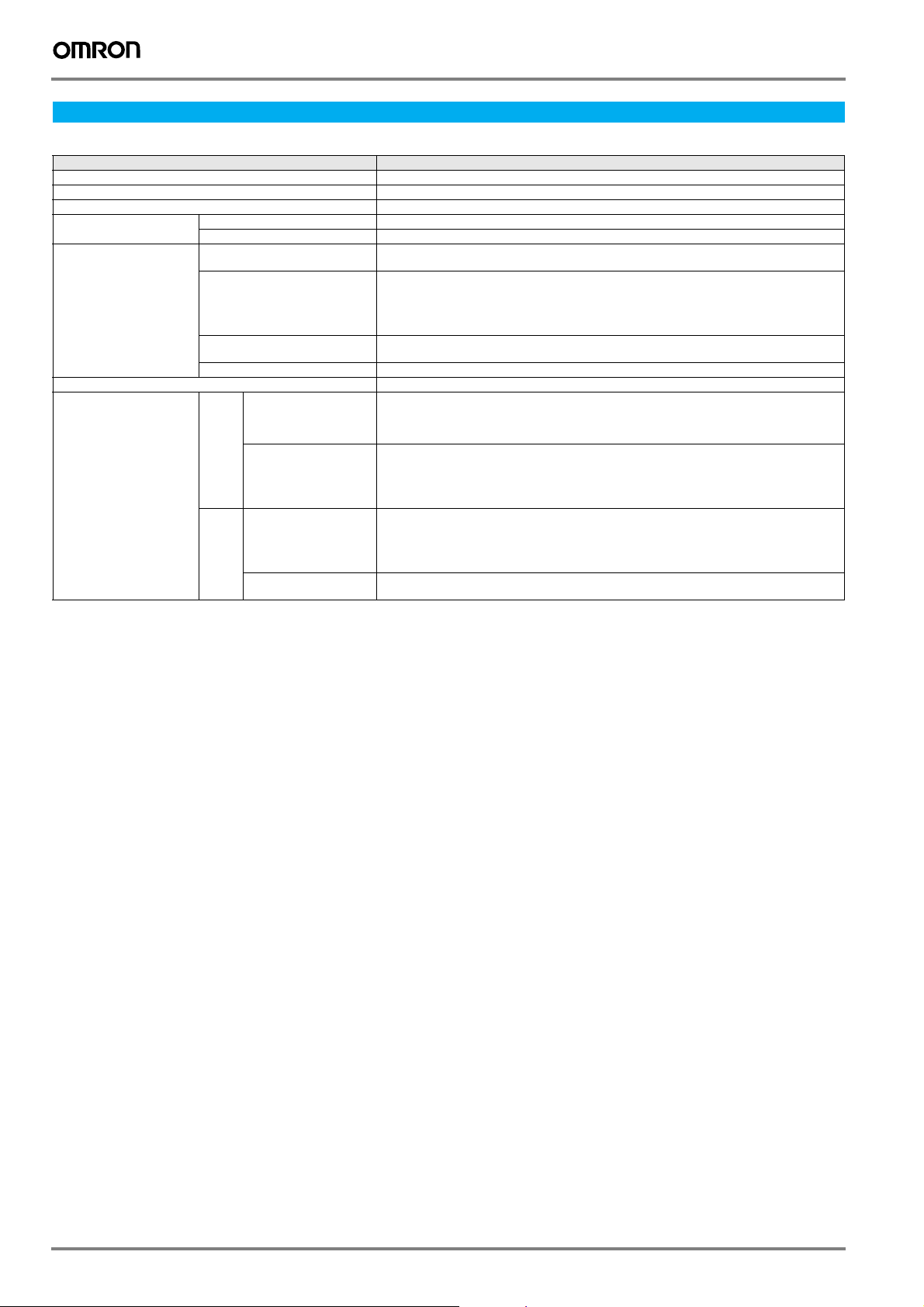
JUSP-NS600 - indexer unit
Item Details
Type JUSP-NS600
Applicable servo drive All SGDH-@@@E SERVOPACKs
Installation method Mounted on the SGDH servo drive side: CN10.
Basic specifications Power supply method Supplied from the servo drive control power supply
Control specifications Program table Program table positioning by designating the starting step by the contact input
Other functions External positioning, JOG speed table operation (maximum 16 speeds)
I/O signals Input Servo drive S-ON (Servo ON)
Power consumption 2.6 W
Serial communications Serial commands in ASCII codes
Command table Positioning by designating the command table by the contact input
Zero-point return 3 types
INDEXER module MODE0/1 (mode signal)
Output Servo drive ALM (servo alarm)
INDEXER module INPOSITION (positioning completed)
(maximum 128 steps)
Communications specifications: RS422 / RS485 (maximum 50 m (164.0 ft))
Connection: Multi-drop method (maximum 16 axes)
Baud rate: 9600, 19200, 38400bps
(maximum 128 points)
P-OT (forward run prohibited), N-OT (reverse run prohibited)
DEC (zero-point return deceleration LS)
RTRG (external positioning signal)
START/HOME (start signal / zero-point return execution)
PGMRES/JOGP (program reset / motor forward rotation)
SEL0/JOGN (program starting step designation / motor reverse rotation)
SEL1 to SEL4 / JOG0 to JOG3 (program starting table selection / JOG speed table selection)
WARN (warning)
BK (brake interlock)
S-RDY (servo ready)
ALO1, ALO2, ALO3 (alarm codes)
POUT0 to POUT4 (programable outputs)
RS232C (maximum 3 m (9.84 ft))
112 Motion controllers
 Loading...
Loading...