

Omron JUSP-NS500 DATASHEET [de]

JUSP-NS500
PROFIBUS-DP-Baugruppe
Positionierungsfunktionalität mit PROFIBUSDP-Kommunikation.
• Für direkten Anschluss von Servoantrieben der
Sigma-II-Serie
• Vereinfacht die dezentrale Steuerung und die Informationsverwaltung
• Keine Programmiersprachen erforderlich
• Verschiedene Positionierungsfunktionen, einschließlich Punkt-zu-Punkt-Modus (mit Festgeschwindigkeits-Positionierung verfügbar) und
Stationsnummer-Modus (Indexer-Funktion)
• Alle Parameter können über eine SPS oder einen
PC eingestellt und verwaltet werden
• An das PROFIBUS-DP-Netzwerk können bis zu
126 Servos angeschlossen werden
Systemkonfiguration
Motion Control
PROFIBUS-DP-Master
Sigma II-Serie
Servoantrieb
SGDH-
Endlagenschalter,
Kontaktsensoren
PROFIBUS-DP-Baugruppe
SERVOPACK
200VVer.
CHARGE POWER
CN3
CN1
CN2
Sigma II-Serie
Servomotor
JUSP-NS500
PROFIBUS-DP
SERVOPACK
CHARGE POWER
CN2
NS500
200VVer.
6
CN3
CN1
SERVOPACK
CHARGE POWER
CN2
NS500
200VVer.
6
CN3
CN1
SGDH-
SERVOPACK
CHARGE POWER
CN2
NS500
200VVer.
6
CN3
CN1
SGDH-
NS500
6
SGDH-
Sigma-Serie
Linearmotor
57PROFIBUS-DP-Baugruppe
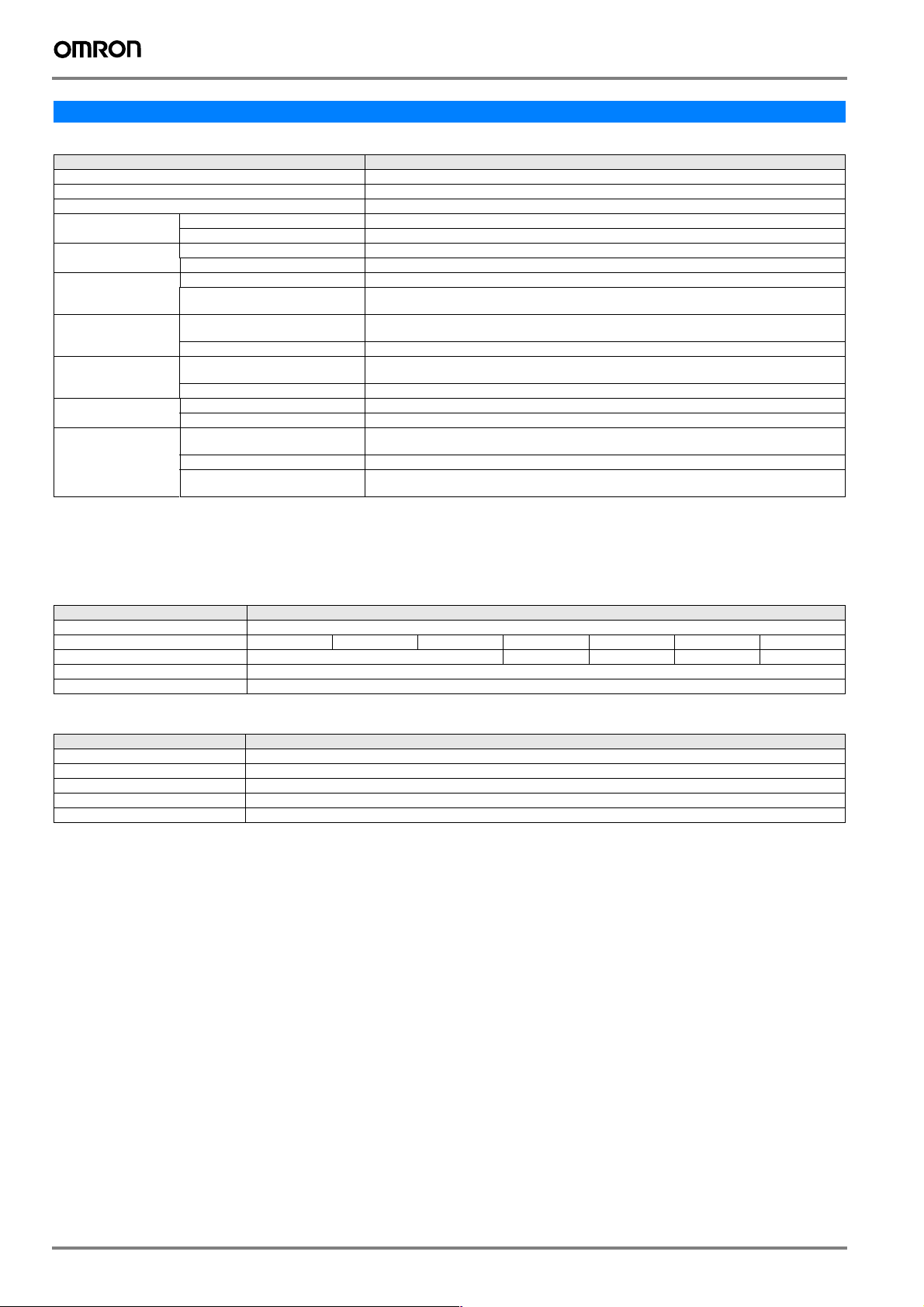
Technische Daten
JUSP-NS500 - PROFIBUS-DP-Schnittstellenbaugruppe
Beschreibung Spezifikationen
Produktbezeichnung JUSP-NS500
Geeigneter Servoantrieb Alle SGDH-E-Modelle
Installationsmethode An der Seite des SGDH-Servoantriebs montiert: CN10.
Basis-
Spezifikationen
PROFIBUS-DP-
Kommunikation
Befehlsformat Betriebsspezifikationen Positionierung mittels PROFIBUS-DP-Kommunikation
PositioniersteuerungsFunktionen
Eingangssignale Feste Zuordnung zur SERVOPACK-
Ausgangssignale Servoantrieb, Steckverbindung CN1
Interne Funktionen Positionsdaten-Erfassungsfunktion
Spannungsversorgung Erfolgt über die Steuerspannungsversorgung des Servoantriebs.
Leistungsaufnahme 1,3 W
Einstellung der Baudrate Die Baudrate wird vom Master automatisch zwischen 9,6 kBit/s und 12 MBit/s eingestellt.
Stationsadressen-Einstellung Mit Drehschaltern sind Adressen von 0 bis 7D (0 bis 125) einstellbar.
Sollwerteingabe PROFIBUS-DP-Kommunikation
Beschleunigungs-/VerzögerungsMethode
Vollständig geschlossener Regelkreis Möglich
Steckverbindung CN1
NS500-Baugruppe Not-Aus-Signal
NS500-Baugruppe P1, P2 (Bereichssignale)
(Latch)
Schutz Parameterschaden, Parameter-Einstellfehler, Kommunikationsfehler, usw.
LED-Anzeigen ERR: Modulfehler
Befehle: Motion-Befehle (Position, Geschwindigkeit) und Parameter lesen/schreiben
Lineare Beschleunigung/Verzögerung, asymmetrisch, exponentiell, S-Kurve
Vorwärts-/Rückwärtslauf gesperrt, Nullpunktrückkehr-Verzögerung LS, Nullpunktsignal,
externes Positionierungssignal
∗
Servoalarm, Bremssperre, Servo bereit, Positionierung abgeschlossen
Positionsdaten-Erfassung (Latch) ist unter Verwendung von Phase C, Nullpunktsignalen und
externen Signalen möglich.
COMM: Kommunikationsstatus
Hinweis: *Die Zuweisung der Ausgangssignale für „Bremssperre“, „Servo bereit“ oder „Positionierung abgeschlossen“ kann mit Hilfe der
Parametereinstellungen geändert werden.
Übertragungsspezifikationen
Eigenschaft Spezifikationen
Kommunikationsformat Konform mit PROFIBUS-DP
Übertragungsgeschwindigkeit (kBit/s) 9,6 19,2 93,75 187,5 500 1500 12000
Übertragungsdistanz (m) 1200 1000 400 200 100
Übertragungsmedium STP-Kabel
Anzahl der Stationen 32 Stationen (kann durch Verwendung eines Verstärkers auf 126 Stationen erweitert werden).
Kabel
Eigenschaft Spezifikationen
Kabeltyp und Impedanz Abgeschirmtes, paarweise verdrilltes Kabel vom Typ A, 135 bis 165 Ω
Kapazität < 30 pf/m
Regelkreis-Widerstand 110 Ω/km
Drahtdurchmesser 0,64 mm
Leiterquerschnitt > 0,34 mm
2
Steckverbindung
Es werden 9-polige Sub-D-Steckverbindungen verwendet.
58 Motion Control
 Loading...
Loading...