

Omron JUSP-NS300 DATASHEET [es]
JUSP-NS300
Unidad DeviceNet
Conectividad DeviceNet con funcionalidad
de posicionado.
• Conexión directa con el servodriver de la
serie Sigma-II
• Simplifica el control distribuido y la administración
de la información
• No se requieren lenguajes de programación
• Varias funciones de posicionado, incluido el modo
punto a punto (con disponibilidad de posicionado de
multivelocidad) y modo de número de estación (función de indexado)
• Todos los parámetros se configuran y mantienen
mediante un PLC o PC.
• Se pueden conectar hasta 63 servos a la red
DeviceNet
• Admite pooling de E/S y mensajes explícitos
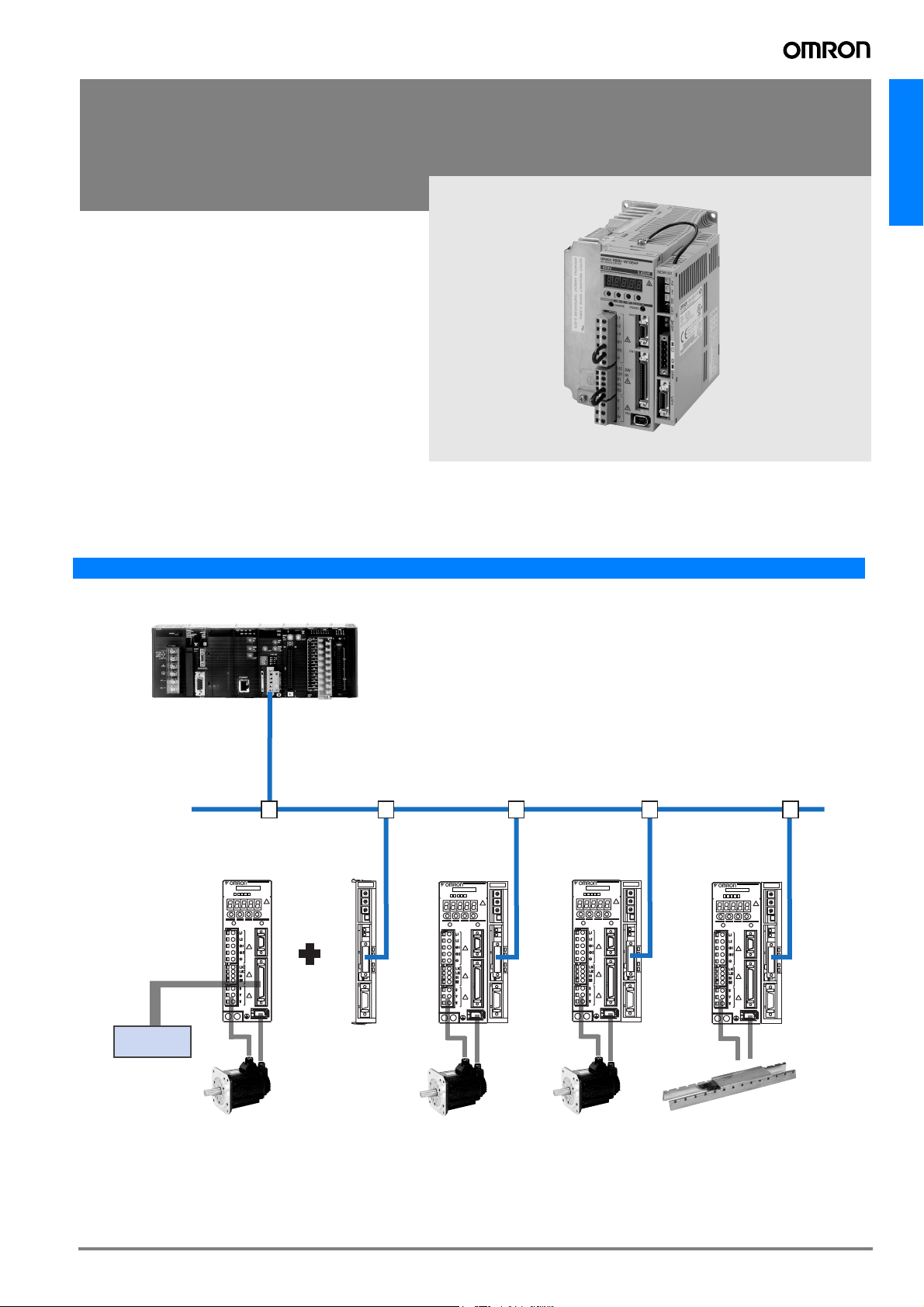
Control de movimiento
Configuración del sistema
Serie CJ1/CS1
Maestro
DeviceNet
Serie Sigma II
Servodriver
Finales de
carrera, sensores
de contacto
SERVOPACK
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CN2
JUSP-NS300
Unidad
DeviceNet
Serie Sigma II
Servomotor
DeviceNet
SERVOPACK
CHARGE POWER
CN2
NS300
7
8
6
9
0
X
5
4
10
1
3
200VVer.
2
7
8
6
9
X
0
5
4
1
1
3
2
7
8
6
9
D
0
5
R
4
1
3
2
C
N
11
M
S
CN3
N
S
CN1
SGDH-
CHARGE POWER
CN2
NS300
SERVOPACK
7
8
6
9
0
X
5
4
10
1
3
2
200VVer.
7
8
6
9
X
0
5
4
1
1
3
2
7
8
6
9
D
0
5
R
4
1
3
2
C
N
11
M
S
CN3
N
S
CN1
Serie Sigma
Motor lineal
NS300
7
8
6
9
0
X
5
4
10
1
3
2
7
8
6
9
X
0
5
4
1
1
3
2
7
8
6
9
D
0
5
R
4
1
3
2
C
N
11
M
S
N
S
SGDH-
CHARGE POWER
CN2
NS300
SERVOPACK
7
8
6
9
0
X
5
4
10
1
3
2
200VVer.
7
8
6
9
X
0
5
4
1
1
3
2
7
8
6
9
D
0
5
R
4
1
3
2
C
N
11
M
S
CN3
N
S
CN1
SGDH-
51Unidad DeviceNet
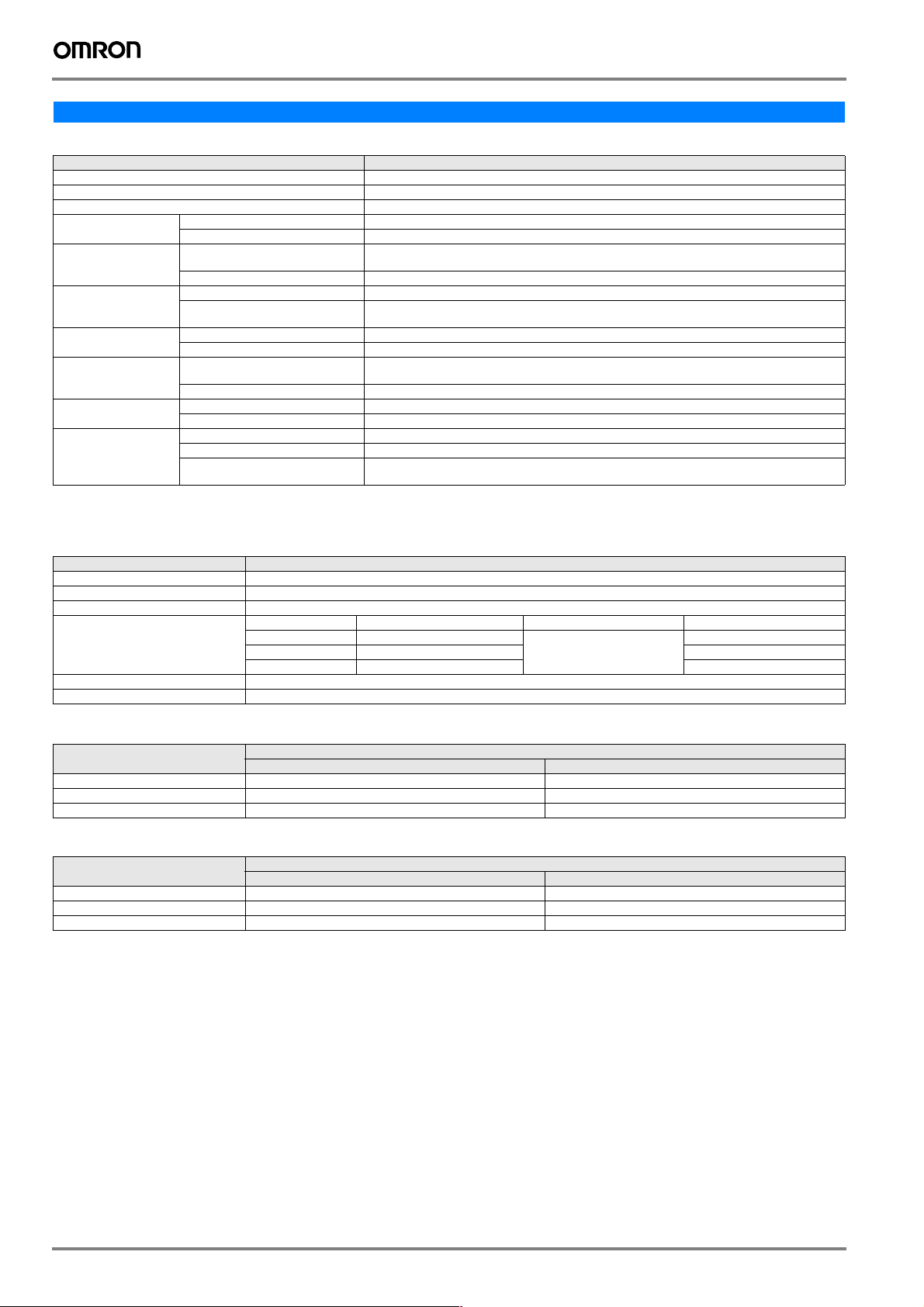
Especificaciones
JUSP-NS300 - Unidad de interfaz DeviceNet
Elemento Descripción
Tipo JUSP-NS300
Servodriver aplicable Todos los modelos SGDH-E
Método de instalación Montado en el lateral del servodriver SGDH: CN10.
Especificaciones
básicas
Comunicaciones
DeviceNet
Formato de comando Especificaciones de operación Posicionado mediante comunicaciones DeviceNet.
Control de posición
Funciones
Señales de entrada Asignación fija al servodriver
Señales de salida Conector del servodriver CN1
Funciones internas Función de captura de posición La captura de la posición es posible usando fase Z, señales de punto cero y señales externas.
Nota: *La asignación de las señales de salida de bloqueo de freno, servo preparado o finalización de posicionado se puede cambiar mediante
configuración de parámetros.
Especificaciones de transmisión
Elemento Especificaciones
Formato de comunicaciones Multipunto, bifurcación en T (1:N)
Velocidad de transmisión (kbps) 500, 250, 125 kbps
Medio de transmisión Cables de 5 hilos
Distancia de transmisión Velocidad Longitud máxima de red Longitud de bifurcación Longitud de bifurcación total
Número de nodos Hasta 64 unidades
Control de errores Error SRS, comprobación de dirección de nodo duplicada
Método de alimentación Suministrada desde la fuente de alimentación de control del servodriver.
Consumo 1,3 W
Configuración de velocidad
de transmisión
Configuración de dirección de nodo Selección de la dirección de 0 a 63 mediante switches rotativos.
Entrada de referencia Comunicaciones DeviceNet
Método de aceleración/deceleración Lineal, curva S
Fully Closed Encoder Posible
Conector CN1
Unidad NS300 Señal de parada de emergencia
Unidad NS300 P1, P2 (señales de área)
Protección Daño de parámetros, errores de ajuste de parámetros, errores de comunicaciones, etc.
Indicadores LED MS: Estado del módulo
500 kbps 100 m o inferior
250 kbps 250 m o inferior 78 m o inferior
125 kbps 500 m o inferior 156 m o inferior
Selección de 125 kbps, 250 kbps o 500 kbps mediante un switch rotativo.
Comandos: comandos Motion (posición, velocidad) y lectura/escritura de parámetros
Prohibición de marcha directa/inversa, señal de punto cero, señal de posicionado externa
∗
Alarma de servo, bloqueo de freno, servo preparado, finalización de posicionado
NS: Estado de la red
6 m o inferior
39 m o inferior
Cable
Elemento Cable
Pérdida de señal Poca Mucha
Distancia de transmisión Larga Corta
Ventaja/desventaja Duro (no resulta fácil doblar) Blando (resulta fácil doblar)
Grueso Delgado
Las longitudes máximas de red varían según el tipo de cable según se muestra a continuación.
Velocidad de transmisión
ikbpsj
500 100 100
250 250 100
125 500 100
Cable grueso Cable delgado
Longitud máxima de red (m)
52 Control de movimiento
 Loading...
Loading...