

Page 1

C200HW-MC402-E
Unidad Motion Control
Motion Control multieje
• Motion Control avanzado de 4 ejes reales y 4 ejes
virtuales por unidad. Se pueden instalar hasta
16 módulos en un PLC
• Salidas analógicas para control de posición,
velocidad y par
• Sencillo de programar y modificar mediante
lenguaje BASIC
• Programación multitarea
• Entrada de registro de hardware para cada eje
• Sincronización electrónica de perfiles de levas y
ejes
• Software de programación y depuración Motion
Perfect sencillo, basado en Windows. Incorpora
funciones versátiles de comprobación y monitorización, incluido un osciloscopio de 4 canales por software.
Control de movimiento
Función
La unidad Motion Control avanzada permite el control de lazo cerrado de un máximo de 4 ejes, se programa en lenguaje BASIC
multitarea y está respaldada por una potente herramienta de software. La unidad incorpora un completo conjunto de comandos
que permite programar fácilmente aplicaciones del tipo de cizallas volantes, cuchillos giratorios, así como cualquier aplicación que
necesite perfiles de levas electrónicas y/o cualquier sincronización electrónica entre ejes.
Configuración del sistema
PLC de la serie CS
C200HW-MC402-E
Unidad Motion Control
Cable de E/S
Bloque de
terminales
E/S
Finales de
carrera, sensores
de contacto
Cable de
ejes
Cable de control eje 1
Cable de control eje 2
Cable de control eje 3
Cable de control eje 4
Serie Sigma II
Servomotor
Ordenador personal
Motion Perfect
SERVODRIVER
SGDH-
200VVer.
Serie Sigma II
CHARGE POWER
CN2
Serie Sigma II
Servomotor
CN3
CN1
Servodriver
SERVODRIVER
SGDH-
200VVer.
Serie Sigma II
CHARGE POWER
CN2
CN3
CN1
Servodriver
Serie Sigma II
Servomotor
SERVODRIVER
SGDH-
200VVer.
CHARGE POWER
CN3
CN1
CN2
Serie Sigma II
Servodriver
SGDH-
CHARGE POWER
CN2
SERVODRIVER
200VVer.
Serie Sigma II
CN3
Servodriver
CN1
Serie Sigma
Motor lineal
43Unidad Motion Control
Page 2
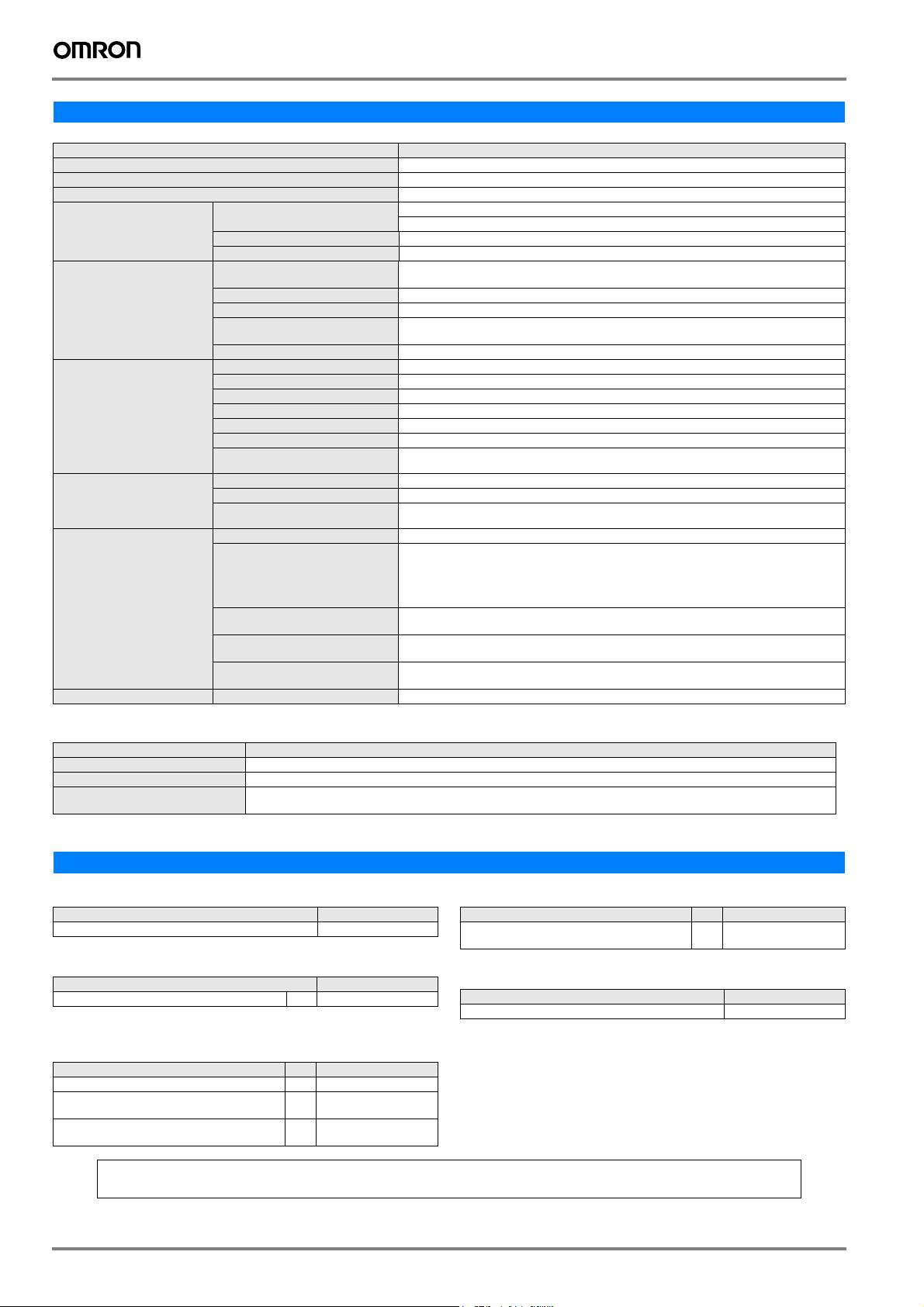
Especificaciones
Modelo C200HW-MC402-E
Clasificación Unidad de E/S especial C200H
Señales de control Analógica +/- 10 V
Lenguaje de programación Lenguaje Motion Control tipo BASIC
Especificaciones
básicas
Especificaciones funcionales Ejes controlados 4 ejes reales
Motion Control Interpolación lineal 4 ejes
Capacidad de programación
de tareas
E/S externa Entrada de encoder Entradas de line-receiver para 4 ejes (1 MHz después de la multiplicación x4)
Comunicaciones serie RS-232C Conexión a PC (software Motion Perfect).
Tensión de alimentación 5 Vc.c. (suministrada por el bastidor).
Masa aprox. 500 g
Dimensiones 130 x 34,5 x 100,5 mm (alto x ancho x fondo)
Método de control Lazo cerrado con encoder incremental
Servo ciclo 1,0 ms
Control de velocidad Control de velocidad de hasta 4 ejes. Frecuencia de entrada de pulsos de hasta 1 MHz
Unidades de medida Definible por el usuario
Interpolación circular Para 2 ejes cualesquiera
Interpolación helicoidal Para 3 ejes cualesquiera
Sincronización de ejes Para 2 ejes cualesquiera
Perfil de leva respecto a otro eje Para 2 ejes cualesquiera
Registro hardware 4 ejes
Curvas de aceleración/
deceleración
Número de tareas Hasta 5 tareas simultáneas + tarea de interfaz
Número de programas 14
Capacidad de almacenamiento
de datos
Relaciones del servodriver Se proporcionan las siguientes señales por eje
Entradas digitales Se pueden conectar hasta 16 entradas digitales como propósito general. Entre dichas entra-
Salidas digitales Se puede conectar un total de 8 salidas digitales y utilizarlas como propósito general y/o como
Entradas de registro Cada eje tiene una entrada de registro que se puede utilizar para registrar la posición actual
24 Vc.c. (suministrada por la fuente de alimentación externa)
4 ejes virtuales
después de la multiplicación x4
Trapezoidal o curva S
251 (VR) + 16000 (tabla) máx.
Entradas: Señal de alarma del controlador
Salidas: Activación de controlador (RUN o SERVO ON)
das se pueden incluir finales de carrera, seta de emergencia, entradas de proximidad, etc.
switches para indicar rangos de posición de los ejes.
de cada uno de los ejes.
Reset de alarma del controlador
Comando SPEED
Software Motion Perfect
Modelo Motion Perfect
Unidades MC compatibles C200HW-MC402-E, R88A-MCW151-E, R88A-MCW151-DRT-E
Ordenador aplicable Windows 95/98/2000/NT4.0
Funciones Software de programación y depuración. Funciones de comprobación y monitorización, incluido un osciloscopio de
4 canales por software.
Tabla de selección
Unidad de controlador Motion
Nombre Modelo
Controlador Motion avanzado de 4 ejes C200HW-MC402-E
Cable serie
Nombre Modelo
Cable de programación. 2 m R88A-CCM002P4-E
Bloque de terminales y cables a la unidad de
controlador Motion
Descripción Modelo
Bloque de terminales para la unidad MC402 - R88A-TC04-E
Cable de control de la unidad PLC
(señales de E/S)
Cable de control de la unidad PLC
(control de ejes)
TODAS LAS DIMENSIONES SE ESPECIFICAN EN MILÍMETROS.
Para convertir de milímetros a pulgadas, multiplique por 0,03937. Para convertir de gramos a onzas, multiplique por 0,03527.
1 m R88A-CMX001S-E
1 m R88A-CMX001J1-E
Cables de servodriver de la serie Sigma-II
Descripción Modelo
Cable de conexión de servodriver, 1 eje.
(Se necesita 1 cable para cada servodriver)
1 m R88A-CMUK001J3-E2
Software
Especificaciones Modelo
Software Motion Perfect MOTION TOOLS CD
Cat. No. I07E-ES-01
Con el fin de mejorar los productos, las especificaciones están sujetas a cambio sin previo aviso.
44 Control de movimiento
 Loading...
Loading...