

Omron 3G8F7-CLK12-EV1, 3G8F7-CLK52-EV1, 3G8F7-CLK21-EV1, 3G8F7-CLK53-E, 3G8F7-CLK23-E Operation Manual
Page 1
Cat. No. W383-E1-06
SYSMAC
3G8F7-CLK13-E (Optical Ring, H-PCF Cable)
3G8F7-CLK12-EV1 (Optical Ring, H-PCF Cable)
3G8F7-CLK53-E (Optical Ring, GI Cable)
3G8F7-CLK52-EV1 (Optical Ring, GI Cable)
3G8F7-CLK23-E (Twisted-pair Cable)
3G8F7-CLK21-EV1 (Twisted-pair Cable)
Controller Link Support Boards for PCI Bus
OPERATION M ANUAL
Page 2

Page 3

3G8F7-CLK13-E (Optical Ring, H-PCF Cable)
3G8F7-CLK12-EV1 (Optical Ring, H-PCF Cable)
3G8F7-CLK53-E (Optical Ring, GI Cable)
3G8F7-CLK52-EV1 (Optical Ring, GI Cable)
3G8F7-CLK23-E (Twisted-pair Cable)
3G8F7-CLK21-EV1 (Twisted-pair Cable)
Controller Link Support Boards for PCI Bus
Operation Manual
Revised December 2018
Page 4

iv
Page 5

Notice:
OMRON products are manufactured for use according to proper procedures by a qualified operator
and only for the purposes described in this manual.
The following conventions are used to indicate and classify precautions in this manual. Always heed
the information provided with them. Failure to heed precautions can result in injury to people or damage to property.
!DANGER Indicates an imminently hazardous situation which, if not avoided, will result in death or
serious injury. Additionally, there may be severe property damage.
!WARNING Indicates a potentially hazardous situation which, if not avoided, could result in death or
serious injury. Additionally, there may be severe property damage.
!Caution Indicates a potentially hazardous situation which, if not avoided, may result in minor or
moderate injury, or property damage.
OMRON Product References
All OMRON products are capitalized in this manual. The word “Unit” is also capitalized when it refers to
an OMRON product, regardless of whether or not it appears in the proper name of the product.
The abbreviation “Ch,” which appears in some displays and on some OMRON products, often means
“word” and is abbreviated “Wd” in documentation in this sense.
The abbreviation “PC” means Programmable Controller and is not used as an abbreviation for anything else.
Visual Aids
The following headings appear in the left column of the manual to help you locate different types of
information.
Reference Indicates supplementary information on related topics that may be of inter-
Note Indicates information of particular interest for efficient and convenient op-
eration of the product.
est to the user.
1,2,3... 1. Indicates lists of one sort or another, such as procedures, checklists, etc.
v
Page 6
© OMRON, 2001
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form, or
by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission of
OMRON.
No patent liability is assumed with respect to the use of the information contained herein. Moreover, because OMRON is constantly striving to improve its high-quality products, the information contained in this manual is subject to change without
notice. Every precaution has been taken in the preparation of this manual. Nevertheless, OMRON assumes no responsibility
for errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained in
this publication.
Intel and Celeron are registered trademarks of Intel Corporation.
Microsoft, Windows, Windows Vista, Windows NT, Visual C
++
/Visual C++ .NET Visual Basic/Visual Basic .NET, and
Visual Studio are either registered trademarks or trademarks of Microsoft Corporation in the United States and other countries.
IBM and PC/AT are trademarks of International Business Machines Corporation.
All other product names or company names that appear in this manual are trademarks or registered trademarks of each respective company.
vi
Page 7

TABLE OF CONTENTS
PRECAUTIONS
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
1 Intended Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
2 General Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
3 Safety Precautions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
4 Operating Environment Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
5 Application Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
6 Conformance to EC Directives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii
SECTION 1
Outline of Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1-1 Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-2 Specifications and Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1-3 Basic Procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1-4 Applications Precautions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
SECTION 2
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2-1 Connecting Wired Systems. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2-2 Connecting H-PCF Cable Optical Ring System Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2-3 Optical Ring System (GI Cable) Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2-4 Backup Power Supply Wiring (Optical Ring Systems Only) . . . . . . . . . . . . . . . . . . . . . . . . 46
SECTION 3
Creating Applications Using the C Library. . . . . . . . . . . . . 49
3-1 Basic Flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3-2 Using the C Library. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
SECTION 4
C Language Function Reference. . . . . . . . . . . . . . . . . . . . . . 55
4-1 Library Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4-2 Structure Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4-3 Detailed Error Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
SECTION 5
Data Links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5-1 What Are Data Links?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5-2 Setting Data Links. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5-3 Starting and Stopping Data Links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5-4 Checking Data Link Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5-5 Changing the Data Link Tables with Active Data Links . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
vii
Page 8

TABLE OF CONTENTS
SECTION 6
Message Service. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6-1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6-2 FINS Command/Response Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6-3 Commands and Responses for the Support Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6-4 Response Codes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
SECTION 7
Network Interconnections . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
7-1 What is Network Interconnection? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
7-2 Routing Tables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
7-3 Setting Routing Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
SECTION 8
Communications Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
8-1 Network Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
8-2 Communications Cycle Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
8-3 Data Link I/O Response Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
8-4 Message Service Delay Times. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
SECTION 9
Troubleshooting and Maintenance . . . . . . . . . . . . . . . . . . . . 137
9-1 Troubleshooting Using Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
9-2 Status Information and Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
9-3 Error Log . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
9-4 Cleaning and Inspection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
9-5 Handling Precautions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Appendix A
Standard Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Index. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
viii
Page 9
About this Manual:
This manual describes the operation of the 3G8F7-CLK13-E, 3G8F7-CLK12-EV1, 3G8F7-CLK53-E,
3G8F7-CLK52-EV1, 3G8F7-CLK23-E, and 3G8F7-CLK21-EV1 Controller Link Support Boards for PCI
Bus and includes the sections described below. Controller Link Support Boards are used to connect
IBM PC/AT or compatible computers to a Controller Link Network. The following three manuals are
directly related to application of the Controller Link Network.
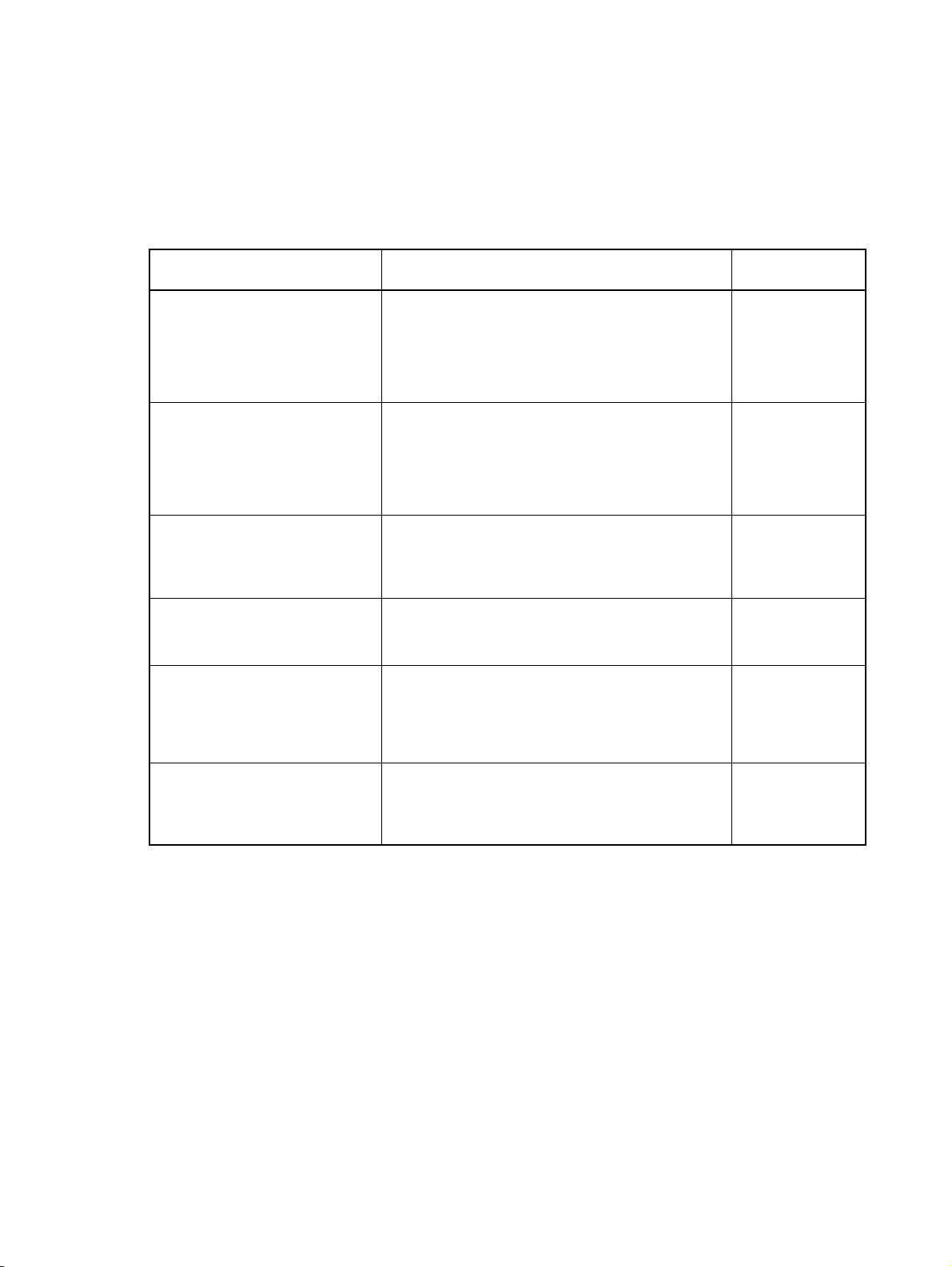
Name Contents Cat. No.
3G8F7-CLK13-E, 3G8F7-CLK12EV1, 3G8F7-CLK53-E, 3G8F7CLK52-EV1, 3G8F7-CLK23-E,
3G8F7-CLK21-EV1
Controller Link Support Boards for
PCI Bus
Operation Manual (this manual)
3G8F7-CLK13-E, 3G8F7-CLK12EV1, 3G8F7-CLK53-E, 3G8F7CLK52-EV1, 3G8F7-CLK23-E,
3G8F7-CLK21-EV1
Controller Link Support Boards for
PCI Bus
Installation Guide
3G8F5-CLK11-E, 3G8F5-CLK21-E
Controller Link Support Boards for
ISA Bus
Operation Manual
C200HW-ZW3AT2-E-V2
Controller Link Support Software
Operation Manual
CS1W-CLK23, CS1W-CLK21-V1,
CJ1W-CLK23, CJ1W-CLK21-V1,
C200HW-CLK21,CVM1-CLK21,
CQM1H-CLK21
Controller Link Units (Wired and
Optical) Operation Manual
CS1W-CLK13, CS1W-CLK12-V1,
CVM1-CLK12, CS1W-CLK53,
CS1W-CLK52-V1, CVM1-CLK52
Optical Ring Controller Link Units
Operation Manual
Operating procedures for Controller Link Support
Boards for PCI bus connections. Controller Link Support Boards are used to connect IBM PC/ATs or compatibles to a Controller Link Network.
Installation and setup procedures for Controller Link
Support Boards for PCI bus connections. Controller
Link Support Boards are used to connect IBM PC/ATs
or compatibles to a Controller Link Network.
Installation, setup, and operating procedures for Controller Link Support Boards for ISA bus connections.
Controller Link Support Boards are used to connect
IBM PC/ATs or compatibles to a Controller Link Network.
Installation and operating procedures for the Controller Link Support Software. The Controller Link Support Software enables manually set data links and
other procedures for a Controller Link Network.
Installation, setup, and operating procedures for the
Optical and Wired Controller Link Units. Controller
Link Units are used to connect C200HX/HG/HE, CVseries, and CS1-series PLCs to a Controller Link Network.
Installation, setup, and operating procedures for the
Optical Ring Controller Link Units. Controller Link
Units are used to connect C200HX/HG/HE CV-series,
and CS1-series PLCs to a Controller Link Network.
(suffixes omitted)
W383
W467
W307
W369
W309
W370
ix
Page 10
About this Manual, Continued
!WARNING Failure to read and understand the information provided in this manual may result in per-
sonal injury or death, damage to the product, or product failure. Please read each section
in its entirety and be sure you understand the information provided in the section and
related sections before attempting any of the procedures or operations given.
Depending on the system, you may also need the SYSMAC or CV Support Software or a Programming Console. Please read this manual and related manuals carefully and be sure you understand the
information provided before attempting to install and operate a Controller Link Support Board.
Section 1 outlines the functions of the Controller Link Support Board, including applications, and the
differences between the Controller Link Support Board and the Controller Link Unit.
Section 2 describes how to wire the power supply cables and communications cables to the Controller
Link Support Board.
Section 3 describes creating applications (user programs) that control the Controller Link Support
Board.
Section 4 details the C-language library functions supported by the Controller Link Support Board.
Section 5 describes how to use data links in a Controller Link Network.
Section 6 explains how to use the message service provided by a Controller Link Support Board.
Section 7 describes the method used to connect multiple networks.
Section 8 explains details on Controller Link Network communications. Refer to this section for net-
work communications that require accurate communications timing.
Section 9 provides information on troubleshooting errors that occur during Controller Link Support
Board operation, as well as daily inspection, cleaning, and other maintenance procedures.
The Appendix provides a list of standard models.
x
Page 11

Terms and Conditions Agreement
Warranty, Limitations of Liability
Warranties
● Exclusive Warranty Omron’s exclusive warranty is that the Products will be free from defects in
materials and workmanship for a period of twelve months from the date of
sale by Omron (or such other period expressed in writing by Omron). Omron
disclaims all other warranties, express or implied.
● Limitations OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR
IMPLIED, ABOUT NON-INFRINGEMENT, MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OF THE PRODUCTS. BUYER
ACKNOWLEDGES THAT IT ALONE HAS DETERMINED THAT THE PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR
INTENDED USE.
Omron further disclaims all warranties and responsibility of any type for claims
or expenses based on infringement by the Products or otherwise of any intellectual property right.
● Buyer Remedy Omron’s sole obligation hereunder shall be, at Omron’s election, to (i) replace
(in the form originally shipped with Buyer responsible for labor charges for
removal or replacement thereof) the non-complying Product, (ii) repair the
non-complying Product, or (iii) repay or credit Buyer an amount equal to the
purchase price of the non-complying Product; provided that in no event shall
Omron be responsible for warranty, repair, indemnity or any other claims or
expenses regarding the Products unless Omron’s analysis confirms that the
Products were properly handled, stored, installed and maintained and not
subject to contamination, abuse, misuse or inappropriate modification. Return
of any Products by Buyer must be approved in writing by Omron before shipment. Omron Companies shall not be liable for the suitability or unsuitability or
the results from the use of Products in combination with any electrical or electronic components, circuits, system assemblies or any other materials or substances or environments. Any advice, recommendations or information given
orally or in writing, are not to be construed as an amendment or addition to the
above warranty.
Limitation on
Liability; Etc
See http://www.omron.com/global/ or contact your Omron representative for
published information.
OMRON COMPANIES SHALL NOT BE LIABLE FOR SPECIAL, INDIRECT,
INCIDENTAL, OR CONSEQUENTIAL DAMAGES, LOSS OF PROFITS OR
PRODUCTION OR COMMERCIAL LOSS IN ANY WAY CONNECTED WITH
THE PRODUCTS, WHETHER SUCH CLAIM IS BASED IN CONTRACT,
WARRANTY, NEGLIGENCE OR STRICT LIABILITY.
Further, in no event shall liability of Omron Companies exceed the individual
price of the Product on which liability is asserted.
xi
Page 12
Application Considerations
Suitability of Use Omron Companies shall not be responsible for conformity with any standards,
codes or regulations which apply to the combination of the Product in the
Buyer’s application or use of the Product. At Buyer’s request, Omron will provide applicable third party certification documents identifying ratings and limitations of use which apply to the Product. This information by itself is not
sufficient for a complete determination of the suitability of the Product in combination with the end product, machine, system, or other application or use.
Buyer shall be solely responsible for determining appropriateness of the particular Product with respect to Buyer’s application, product or system. Buyer
shall take application responsibility in all cases.
NEVER USE THE PRODUCT FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR PROPERTY OR IN LARGE QUANTITIES WITHOUT
ENSURING THAT THE SYSTEM AS A WHOLE HAS BEEN DESIGNED TO
ADDRESS THE RISKS, AND THAT THE OMRON PRODUCT(S) IS PROPERLY RATED AND INSTALLED FOR THE INTENDED USE WITHIN THE
OVERALL EQUIPMENT OR SYSTEM.
Programmable
Products
Omron Companies shall not be responsible for the user’s programming of a
programmable Product, or any consequence thereof.
Disclaimers
Performance Data Data presented in Omron Company websites, catalogs and other materials is
provided as a guide for the user in determining suitability and does not constitute a warranty. It may represent the result of Omron’s test conditions, and the
user must correlate it to actual application requirements. Actual performance
is subject to the Omron’s Warranty and Limitations of Liability.
Change in
Specifications
Errors and Omissions Information presented by Omron Companies has been checked and is
Product specifications and accessories may be changed at any time based on
improvements and other reasons. It is our practice to change part numbers
when published ratings or features are changed, or when significant construction changes are made. However, some specifications of the Product may be
changed without any notice. When in doubt, special part numbers may be
assigned to fix or establish key specifications for your application. Please consult with your Omron’s representative at any time to confirm actual specifications of purchased Product.
believed to be accurate; however, no responsibility is assumed for clerical,
typographical or proofreading errors or omissions.
xii
Page 13

PRECAUTIONS
This section provides general precautions for using the Controller Link Support Board for PCI Bus and related devices.
The information contained in this section is important for the safe and reliable application of the Controller
Link Support Board for PCI Bus. You must read this section and understand the information contained before
attempting to set up or operate a Controller Link Support Board for PCI Bus.
1 Intended Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
2 General Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
3 Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
4 Operating Environment Precautions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
5 Application Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
6 Conformance to EC Directives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii
6-1 Applicable Directives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii
6-2 Applicable Directives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii
6-3 Applicable Directives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
xiii
Page 14

Intended Audience 1
1 Intended Audience
This manual is intended for the following personnel, who must also have
knowledge of electrical systems (an electrical engineer or the equivalent).
• Personnel in charge of installing FA systems.
• Personnel in charge of designing FA systems.
• Personnel in charge of managing FA systems and facilities.
2 General Precautions
The user must operate the product according to the performance specifications described in the operation manuals.
Before using the product under conditions which are not described in the
manual or applying the product to nuclear control systems, railroad systems,
aviation systems, vehicles, combustion systems, medical equipment, amusement machines, safety equipment, and other systems, machines, and equipment that may have a serious influence on lives and property if used
improperly, consult your OMRON representative.
Make sure that the ratings and performance characteristics of the product are
sufficient for the systems, machines, and equipment, and be sure to provide
the systems, machines, and equipment with double safety mechanisms.
This manual provides information for programming and operating the Controller Link Support Board for PCI Bus and related devices. Be sure to read this
manual before attempting to use the software and keep this manual close at
hand for reference during operation.
!WARNING It is extremely important that a Controller Link Support Board for PCI Bus and
all related devices be used for the specified purpose and under the specified
conditions, especially in applications that can directly or indirectly affect
human life. You must consult with your OMRON representative before applying a Controller Link Support Board for PCI Bus to the above mentioned applications.
3 Safety Precautions
!WARNING Never attempt to disassemble any Controller Link Support Board for PCI Bus
while power is being supplied. Doing so may result in serious electrical shock
or electrocution.
!WARNING Never touch any of the terminals while power is being supplied. Doing so may
result in serious electrical shock or electrocution.
!WARNING Provide safety measures in external circuits (i.e., not in the Programmable
Controller), including the following items, to ensure safety in the system if an
abnormality occurs due to malfunction of the Programmable Controller or
another external factor affecting the operation of the Programmable Controller. “Programmable Controller” indicates the CPU Unit and all other Units and
is abbreviated “PLC” in this manual. Not doing so may result in serious accidents.
xiv
• Emergency stop circuits, interlock circuits, limit circuits, and similar safety
measures must be provided in external control circuits.
Page 15

Operating Environment Precautions 4
• The PLC will turn OFF all outputs when its self-diagnosis function detects
any error or when a severe failure alarm (FALS) instruction is executed.
Unexpected operation, however, may still occur for errors in the I/O control section, errors in I/O memory, and other errors that cannot be
detected by the self-diagnosis function. As a countermeasure for all such
errors, external safety measures must be provided to ensure safety in the
system.
• The PLC outputs may remain ON or OFF due to deposition or burning of
the output relays or destruction of the output transistors. As a countermeasure for such problems, external safety measures must be provided
to ensure safety in the system.
• Provide measures in the computer system and programming to ensure
safety in the overall system even if communications errors or malfunctions occur in data link communications or remote I/O communications.
• When the 24-VDC output (service power supply to the PLC) is overloaded
or short-circuited, the voltage may drop and result in the outputs being
turned OFF. As a countermeasure for such problems, external safety
measures must be provided to ensure safety in the system.
!Caution Execute online edit only after confirming that no adverse effects will be
caused by extending the cycle time. Otherwise, the input signals may not be
readable.
!Caution Confirm safety at the destination node before transferring a program to
another node or changing contents of the I/O memory area. Doing either of
these without confirming safety may result in injury.
!Caution Tighten the connector screws for the backup power supply to the torque spec-
ified in this manual. The loose screws may result in burning or malfunction.
4 Operating Environment Precautions
!Caution Do not operate the control system in the following locations:
• Locations subject to direct sunlight.
• Locations subject to temperatures or humidity outside the range specified
in the specifications.
• Locations subject to condensation as the result of severe changes in temperature.
• Locations subject to corrosive or flammable gases.
• Locations subject to dust (especially iron dust) or salts.
• Locations subject to exposure to water, oil, or chemicals.
• Locations subject to shock or vibration.
!Caution Take appropriate and sufficient countermeasures when installing systems in
the following locations:
• Locations subject to static electricity or other forms of noise.
• Locations subject to strong electromagnetic fields.
xv
Page 16

Operating Environment Precautions 4
• Locations subject to possible exposure to radioactivity.
• Locations close to power supplies.
!Caution The operating environment of the Controller Link Support Board for PCI Bus
or the computer can have a large effect on the longevity and reliability of the
system. Improper operating environments can lead to malfunction, failure,
and other unforeseeable problems with the Controller Link Support Board for
PCI Bus or the computer. Be sure that the operating environment is within the
specified conditions at installation and remains within the specified conditions
during the life of the system.
xvi
Page 17

Application Precautions 5
5 Application Precautions
Observe the following precautions when using the Controller Link Support
Board for PCI Bus or the computer into which it is installed.
Note Refer also to 1-4 Applications Precautions for further information and addi-
tional precautions.
!WARNING Failure to abide by the following precautions could lead to serious or possibly
fatal injury. Always heed these precautions.
• Always ground the system to 100 Ω or less when installing the system to
protect against electrical shock.
• Always turn OFF the power of the computer before attempting any of the
following. Performing any of the following with the power supply turned on
may lead to electrical shock:
• Installing or removing the Support Board.
• Assembling the Units.
• Setting DIP switches or short-circuiting pins.
• Connecting or disconnecting any cables or connectors.
!Caution Failure to abide by the following precautions could lead to faulty operation of
the computer or the system or could damage the Controller Link Support
Board for PCI Bus or related devices. Always heed these precautions.
• Fail-safe measures must be taken by the customer to ensure safety in the
event of incorrect, missing, or abnormal signals caused by broken signal
lines, momentary power interruptions, or other causes.
• Always use the power supply voltage specified in the operation manuals.
An incorrect voltage may result in malfunction or burning.
• Take appropriate measures to ensure that the specified power with the
rated voltage and frequency is supplied. Be particularly careful in places
where the power supply is unstable. An incorrect power supply may result
in malfunction.
• Install external breakers and take other safety measures against short-circuiting in external wiring. Insufficient safety measures against short-circuiting may result in burning.
• Disconnect the functional ground terminal when performing withstand
voltage tests. Not disconnecting the functional ground terminal may result
in burning.
• Do not attempt to take the Boards apart, to repair the Boards, or to modify
the Boards in any way.
• Be sure that all the mounting screws, terminal screws, and cable connector screws are tightened to the torque specified in this manual. Incorrect
tightening torque may result in malfunction.
• Use crimp terminals for wiring. Do not connect bare stranded wires
directly to terminals. Connection of bare stranded wires may result in
burning.
• Double-check all the wiring before turning ON the power supply. Incorrect
wiring may result in burning.
• Wire correctly.
• Double-check all the connectors before mounting the Board.
xvii
Page 18

Conformance to EC Directives 6
• Be sure that the communications cable connectors and other items with
locking devices are properly locked into place. Improper locking may
result in malfunction.
• Use a special packing box when transporting the Board. Handle the product carefully so that no excessive vibration or impact is applied to the
product during transportation.
• Check the user program for proper execution before actually running it on
the Unit. Not checking the program may result in an unexpected operation.
• Observe the following precautions when wiring the communications cable
or backup power supply cables.
• Separate the cables from power lines or high-tension lines.
• Do not bend the cables.
• Do not pull on the cables.
• Do not place heavy objects on top of the cables.
• Route cables inside conduits.
• Before touching the Unit, be sure to first touch a grounded metallic object
in order to discharge any static built-up. Not doing so may result in malfunction or damage.
• Do not touch the Board surfaces or parts.
• Install the Board according to instructions in the operation manuals.
Improper installation may cause faulty operation.
• When using the Optical Ring Controller Link Support Board for public utilities systems, such as electricity, gas, or water supply, use the Optical
Ring mode and provide appropriate fail-safe measures.
6 Conformance to EC Directives
6-1 Applicable Directives
•EMC Directives
6-2 Applicable Directives
EMC Directives
OMRON devices that comply with EC Directives also conform to the related
EMC standards so that they can be more easily built into other devices or
machines. The actual products have been checked for conformity to EMC
standards (see the following note). Whether the products conform to the standards in the system used by the customer, however, must be checked by the
customer.
EMC-related performance of the OMRON devices that comply with EC Directives will vary depending on the configuration, wiring, and other conditions of
the equipment or control panel in which the OMRON devices are installed.
The customer must, therefore, perform final checks to confirm that devices
and the overall machine conform to EMC standards.
Note Applicable EMC (Electromagnetic Compatibility) standards are as follows:
EMS (Electromagnetic Susceptibility): EN61000-6-2
EMI (Electromagnetic Interference): EN61000-6-4
xviii
Page 19

Conformance to EC Directives 6
6-3 Applicable Directives
The 3G8F7-CLK13-E, 3G8F7-CLK12-EV1, 3G8F7-CLK53-E, 3G8F7-CLK52EV1, 3G8F7-CLK23-E, and 3G8F7-CLK21-EV1 Controller Link Support
Boards comply with EC Directives. To ensure that the machine or device in
which any of these Controller Link Support Boards is used complies with EC
directives, the Board must be installed as follows:
1,2,3... 1. Reinforced insulation or double insulation must be used for the DC power
supplies used for the communications and I/O power supplies.
2. Controller Link Support Boards complying with EC Directives also conform
to the Common Emission Standard (EN61000-6-4). Particularly for the 10m radiated emission, the structure of the control panel, relations to other
connected devices, and wiring can affect compliance of the overall system.
The customer must, therefore, perform final checks to confirm that devices
and the overall machine conform to EC standards even when individual
devices conform.
3. For the Controller Link Support Boards, the backup power supply that is
used may affect compliance for surge immunity (IEC61000-4-5) even
though common immunity (EN61000-6-2) standards for EMS are met. Either use the recommended OMRON Power Supply (S82K Series) or take
countermeasures for surge on the primary side.
xix
Page 20

Conformance to EC Directives 6
xx
Page 21

SECTION 1
Outline of Functions
This section outlines the functions of the Controller Link Support Board, including the applications of the Controller
Link Support Board and the differences between the Controller Link Support Board and the Controller Link Unit.
1-1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-1-1 What Is the Controller Link? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-1-2 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1-1-3 What Is a Controller Link Support Board? . . . . . . . . . . . . . . . . . . . 10
1-1-4 Features of PCI Bus Controller Link Support Boards . . . . . . . . . . . 11
1-1-5 Outline of PCI Bus Controller Link Support Board Functions . . . . 11
1-2 Specifications and Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1-2-1 System Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1-2-2 PCI Bus Controller Link Support Board Models. . . . . . . . . . . . . . . 15
1-2-3 Communications Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1-2-4 General Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1-2-5 Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1-2-6 Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1-2-7 Product Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1-2-8 Software Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1-2-9 Applicable Computers, Operating Systems, and Libraries . . . . . . . 21
1-3 Basic Procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1-4 Applications Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1
Page 22
Overview Section 1-1
CQM1H-CLK21
Controller Link Unit
CS-series
PC
Twisted-pair cable 3G8F5-CLK21-E
Controller Link
ISA Support Board
CS1W-CLK21
Controller Link Unit
C200HW-CLK21
Controller Link Unit
C200HX/HG/
HE PC
CVM1 or
CV-series PC
CVM1-CLK21
Controller Link Unit
CQM1Hseries PC
3G8F7-CLK21-EV1
Controller Link
PCI Support Board
IBM PC/AT or
compatible
IBM PC/AT or
compatible
CS1W-CLK12
Controller Link Unit
(Token Ring Mode)
CVM1-CLK12
Controller Link Unit
(Token Ring Mode)
CS1W-CLK12
Controller Link Unit
(Token Ring Mode)
CVM1-CLK12
Controller Link Unit
(Token Ring Mode)
Backup power
supply (24 VDC)
CS-series PC
CVM1 or
CV-series
PC
CVM1 or
CV-series
PC
CS-series PC
H-PCF Optical Fiber Cable
(ring connection)
3G8F7-CLK12-EV1
Controller Link
PCI Support Board
(Token Ring Mode)
IBM PC/AT or
compatible
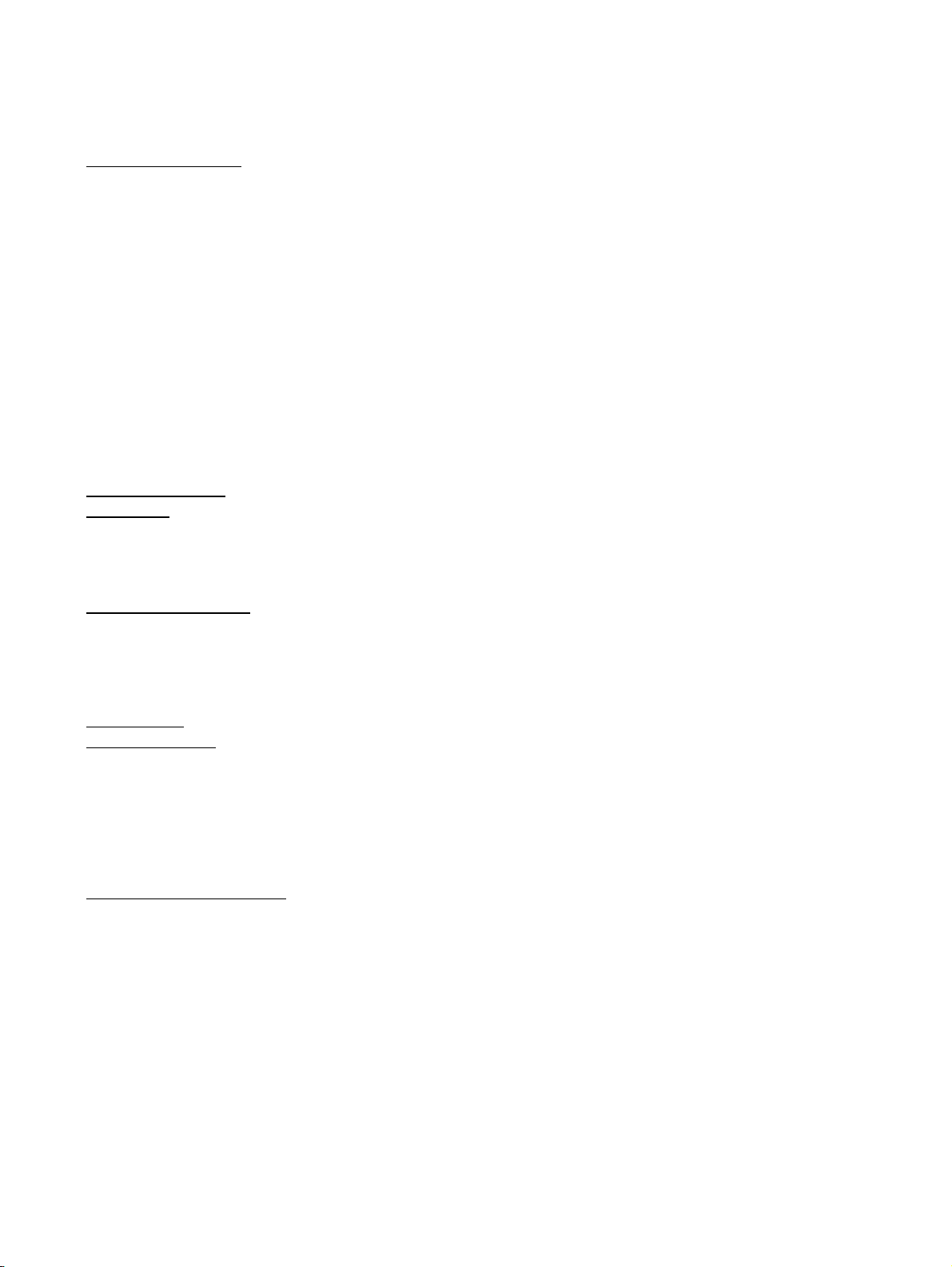
1-1 Overview
1-1-1 What Is the Controller Link?
The Controller Link is an FA network that can send and receive large data
packets flexibly and easily among advanced OMRON Programmable Controllers (CS-series, CJ-series, C200HX/HG/HE-series, CQM1H-series, CVM1,
and CV-series PCs) and IBM PC/AT or compatible computers.
The Controller Link supports data links that enable data sharing and a message service that enables sending and receiving data when required. Data
link areas can be freely set to create a flexible data link system and effectively
use data areas.
The network is connected using either shielded twisted-pair cable or optical
fiber cable, and high-volume data transmissions at high speed enable construction of a wide range of networks, from low-level systems to high.
Wired System
(Twisted-pair Cable)
Optical Bus or Optical
Ring System
(H-PCF Cable)
Wired Systems are supported by CS-series, CJ-series, C200HX/HG/HE,
CQM1H-series CVM1, and CV-series PCs.
Optical Systems are supported by CS-series, CVM1, and CV-series PCs.
Token Ring Mode
2
Page 23
Overview Section 1-1
CS1W-CLK12
Controller Link Unit
(Token-bus mode)
CS1W-CLK11
Controller Link Unit
CVM1-CLK12
Controller Link Unit
(Token-bus mode)
3G8F5-CLK11
Controller Link
ISA Support Board
CS-series PC
CS-series PC
CVM1 or
CV-series
PC
Backup power
supply (24 VDC)
H-PCF Optical Fiber Cable
(daisy-chain connection)
IBM PC/AT or
compatible
3G8F7-CLK12-EV1
Controller Link
PCI Support Board
(Token bus mode)
IBM PC/AT or
compatible
CS1W-CLK52
Controller Link Unit
(Token Ring Mode)
CVM1-CLK52
Controller Link Unit
(Token Ring Mode)
CS1W-CLK52
Controller Link Unit
(Token Ring Mode)
CVM1-CLK52
Controller Link Unit
(Token Ring Mode)
Backup power
supply (24 VDC)
CS-series PC
CVM1 or
CV-series
PC
CVM1 or
CV-series
PC
CS-series PC
GI Optical Fiber Cable
(ring connection)
3G8F7-CLK52-EV1
Controller Link
PCI Support Board
(Token Ring Mode)
IBM PC/AT or
compatible
CS1W-CLK52
Controller Link Unit
(Token-bus mode)
CS-series PC
CS-series PC
CVM1 or
CV-series PC
Backup power
supply (24 VDC)
GI Optical Fiber Cable
(daisy-chain connection)
CS1W-CLK52
Controller Link Unit
(Token-bus mode)
CVM1-CLK52
Controller Link Unit
(Token-bus mode)
3G8F7-CLK52-EV1
Controller Link
PCI Support Board
(Token bus mode)
IBM PC/AT or
compatible
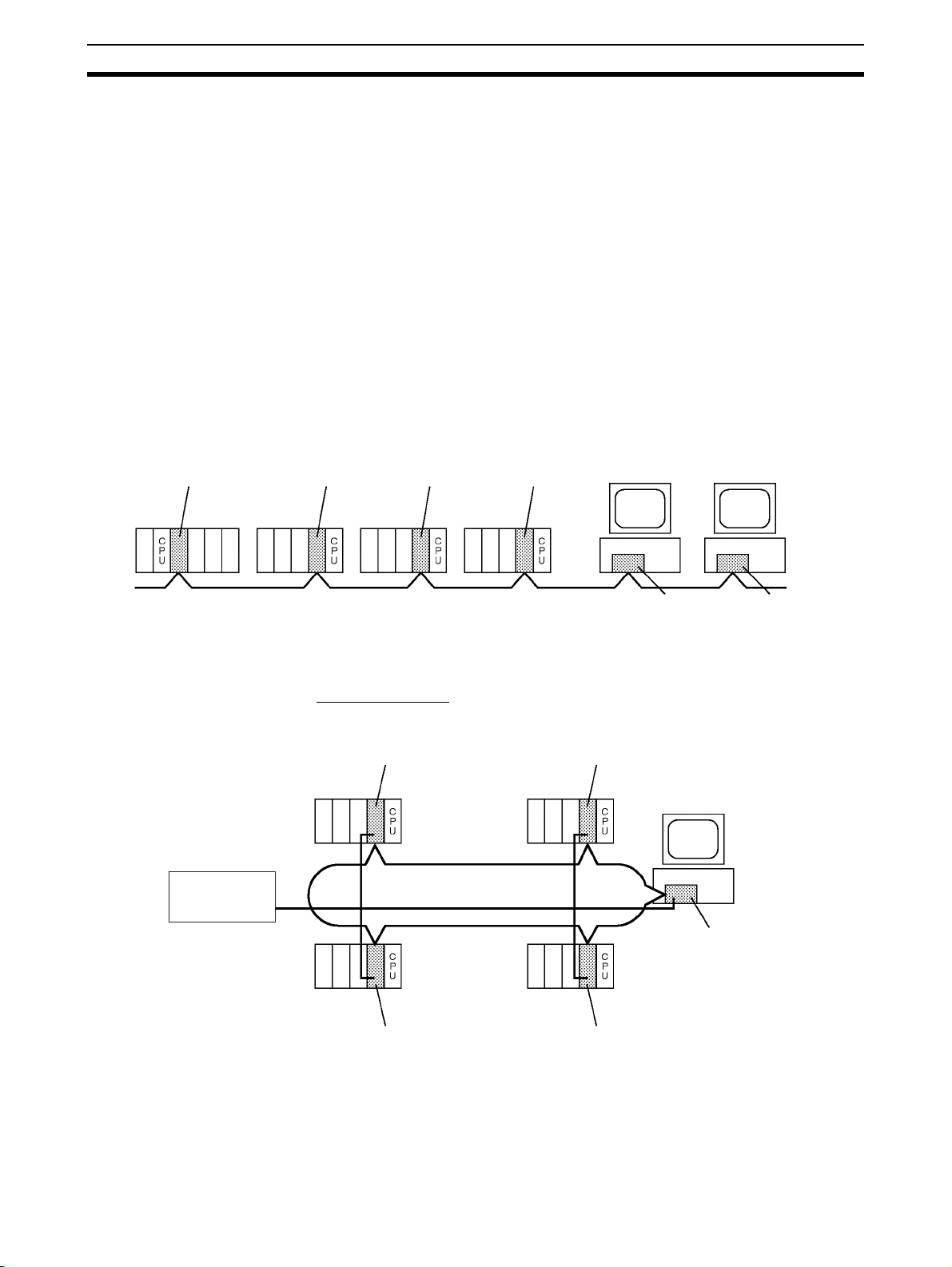
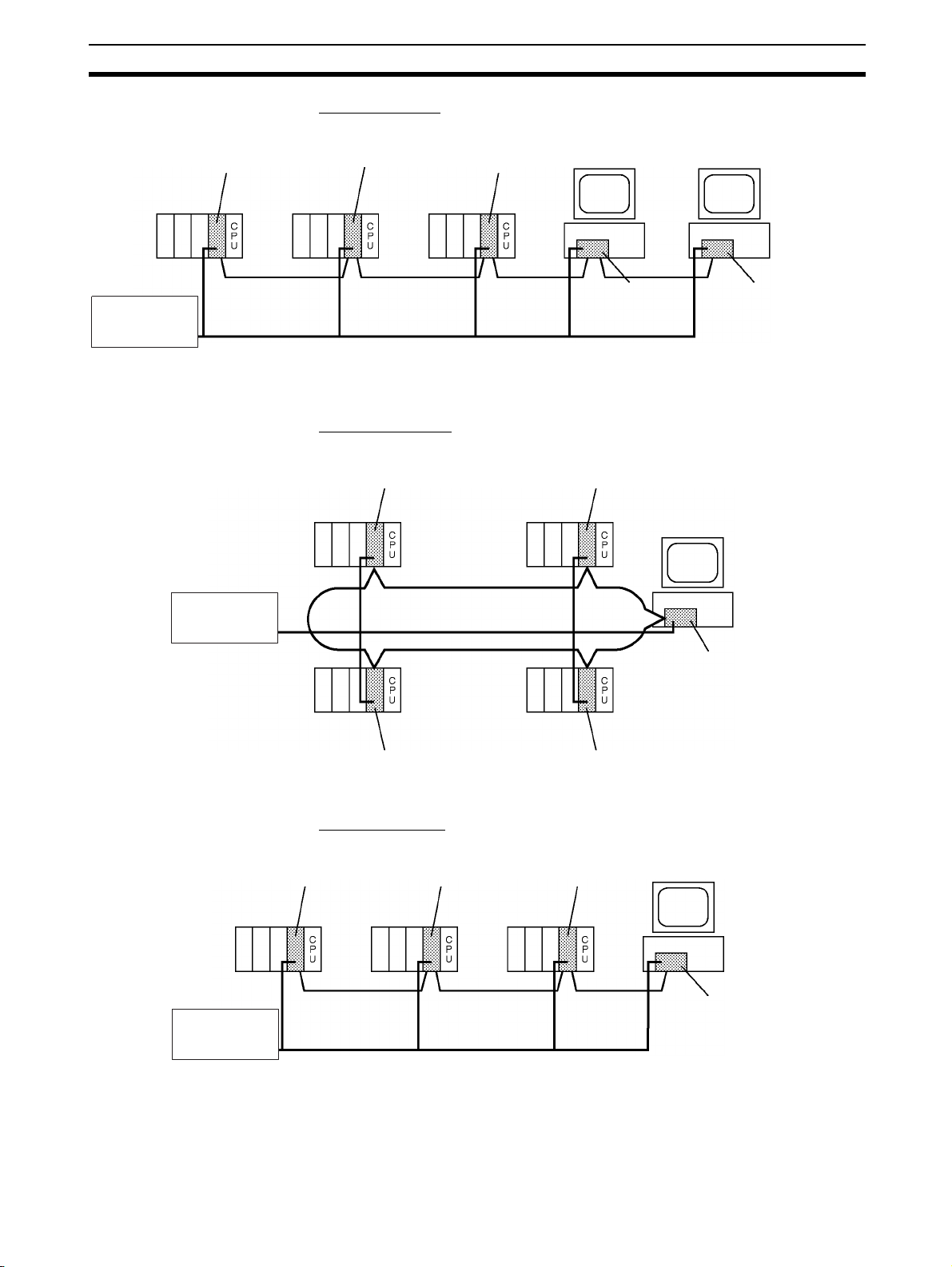
Tokenbus Mode
Optical Bus or Optical
Ring System (GI Cable)
Optical Systems are supported by CS-series, CJ-series, CVM1, and CVseries PCs.
Token Ring Mode
Token-bus Mode
3
Page 24

Overview Section 1-1
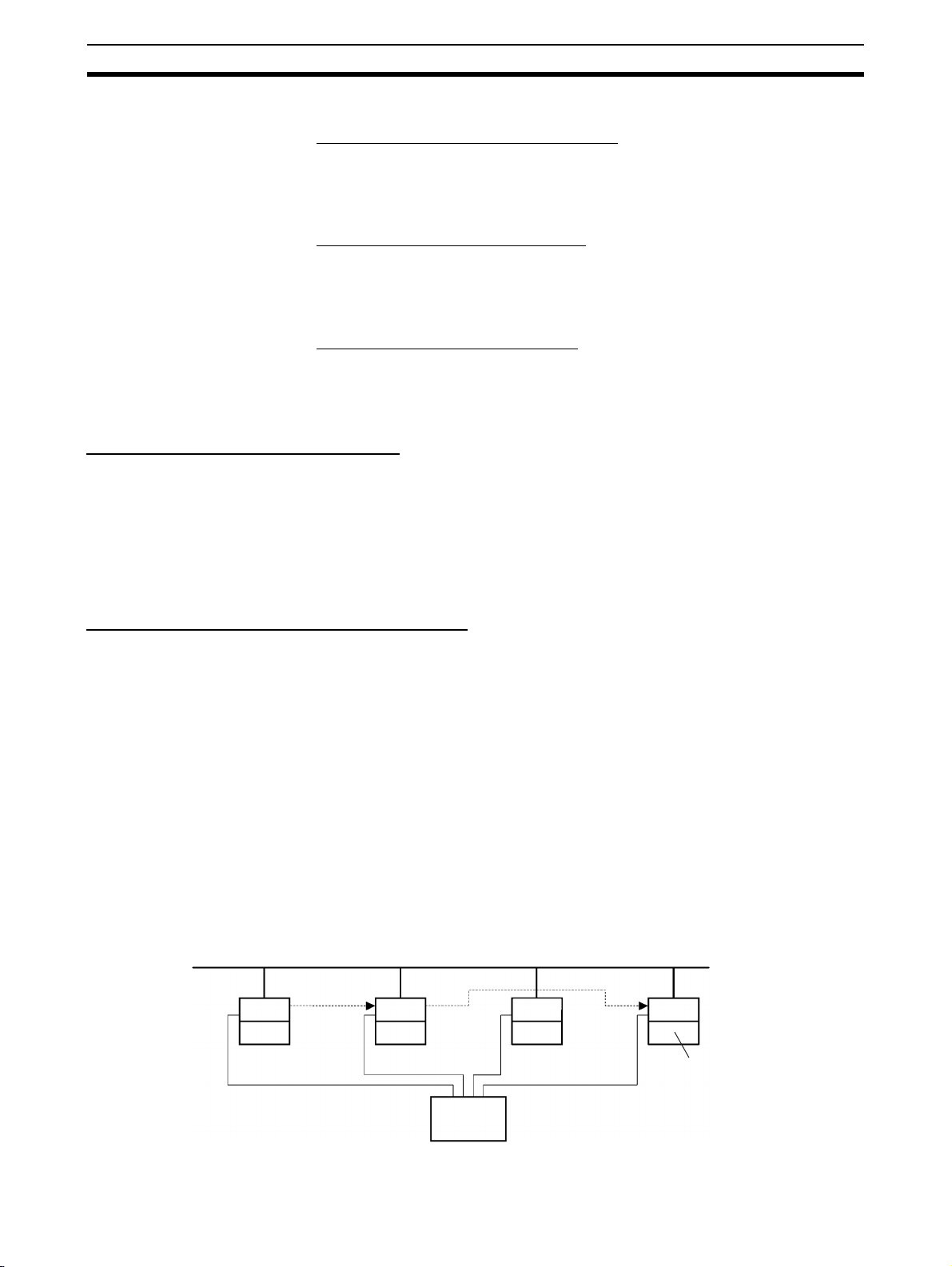
Data link
Manual settings
Automatic settings
Message service
RAS functions Error log function
Data link status display
Polling node backup
function
Controller Link
Node bypass function
Transmission path
duplication
Disconnect detection and
notification
Node connection
configuration data reading
Note 1. Optical Systems and Optical Ring Sys-
tems only.
2. Only for Optical Ring Systems in Token
Ring Mode.
(See note 1.)
(See note 2.)
(See note 2.)
(See note 2.)
The functions of a Controller Link Network are outlined below.
1-1-2 Features
The Controller Link FA Network has the following features to meet the various
requirements of FA sites.
Data Links Flexible and efficient data links can be created for large capacities of data as
Number of
data link
words
Item Specifications
listed below.
Send areas
per node
Data link
areas (send
and receive)
that can be
created per
node
CS or CJ Series CS1W-CLK23 or CJ1W-CLK23:
C200HX/HG/HE,
CVM1/CV, CQM1H
Computers 3G8F7-CLK23-E: 4,000 words max.
CS or CJ Series CS1W-CLK23 or CJ1W-CLK23:
C200HX/HG/HE,
CVM1/CV, or CQM1H
Computers 32,000 or 62,000 words max. (See note 2.)
CS1W-CLK21-EV1 or CJ1W-CLK21-EV1:
1,000 words max.
3G8F7-CLK21-EV1, 3G8F5-CLK21-E1:
CS1W-CLK21-EV1 or CJ1W-CLK21-EV1:
8,000 words max.
4,000 words max.
1,000 words max.
1,000 words max.
20,000 words max.
20,000 words max. (unit version 1.2 or later)
12,000 words max. (Pre-Ver. 1.2)
4
Page 25
Overview Section 1-1
Note The following models must be used to create a wired network that contains
more than 32 nodes: 3G8F7-CLK23-E, 3G8F7-CLK21-EV1, CS1W-CLK23,
CS1W-CLK21-V1, CJ1W-CLK23, and CJ1W-CLK21-V1.
Data links can be automatic set, or they can be set by the user to freely
change the sizes of the data areas used. A data link can also receive only part
of the data sent from another node. This function enables users to receive
only the required data, thereby increasing data link efficiency.
Message Service The message service can send and receive up to 2,012 bytes of data (includ-
ing the FINS header), allowing high volumes of data to be sent and received
without having to split it up.
Twisted-pair Cable or Optical Fiber Cable Connection
The Controller Link Units can be connected to the network using either
shielded twisted-pair cables, optical fiber cables, or optical ring optical fiber
cables. The optical ring optical fiber cables can be either H-PCF cables or GI
cables. Select the system that suits the application.
Features of Twisted-pair Cable
Twisted-pair cable is easy to connect and maintain. The cable can be processed much more easily than coaxial or optical cable, thereby reducing the
cost of tools and assembly time.
Connections are made to a terminal block on the Controller Link Unit and to a
special connector on the computer board for easy system assembly and modification.
The network is equipped with the required terminating resistance built into the
Units allowing the terminating resistance to be easily set at both ends of the
network using a simple switch.
Features of Optical and Optical Ring Systems
Optical fiber cable (H-PCF cable or GI cable) has superior noise resistance,
so the system can provide highly reliable communications even in very noisy
conditions.
With H-PCF cable, the total communications distance can be up to 20 km
(1 km max. between nodes using adhesive polishing). With GI cable, the communications distance can be up to 30 km (2 km max. between nodes using
62.5/125 μm cable), which allows long-distance and large-scale networks.
Once the optical fiber cable has been fitted with special connectors, the
cables can be easily connected or disconnected.
Communications between Different PCs
The following Controller Link Units are available for communications between
different PCs. Wired Units and Optical Units, however, cannot be used
together in the same Controller Link Network. (Optical and Optical Ring Units
can exist in one Controller Link Network using H-PCF cables, but with GI
cables, on an Optical Ring Unit is available.)
Wired System
• Controller Link Unit for CS-series Programmable Controllers
• Controller Link Unit for CJ-series Programmable Controllers
• Controller Link Units for C200HX/HG/HE Programmable Controllers
• Controller Link Units for CV-series Programmable Controllers
• ISA Bus Controller Link Support Board for IBM PC/AT or compatibles
5
Page 26
Overview Section 1-1
Optical transmission path
Bypass
IBM PC/AT or
compatible
Power interruption
24-VDC
Backup Power Supply
CLK
PC
CLK
PC
CLK
PC
CLK
• PCI Bus Controller Link Support Board
Optical Ring System with H-PCF Cables
• Controller Link Unit for CS-series Programmable Controllers
• Controller Link Unit for CVM1/CV-series Programmable Controllers
• PCI Bus Controller Link Support Board
Optical Ring System with GI Cables
• CS-series and CJ-series Programmable Controllers
• CVM1/CV-series Programmable Controllers
• PCI Bus Boards
Optical System with H-PCF Cables
• Controller Link Unit for CS-series and CJ-series Programmable Controllers
• ISA Bus Controller Link Support Board for IBM PC/AT or compatibles
Flexible Internetwork Connections
The Controller Link Network can be connected to another network (Ethernet,
SYSMAC NET Link, SYSMAC LINK, or another Controller Link network)
through a CS-series or CV-series PC. By installing Ethernet, SYSMAC NET
Link, or SYSMAC LINK, or Controller Link Communications Units on the same
CS1-series PC or CV-series PC, a message service can be created with
nodes in the interconnected networks through that PC. Up to three network
levels are possible.
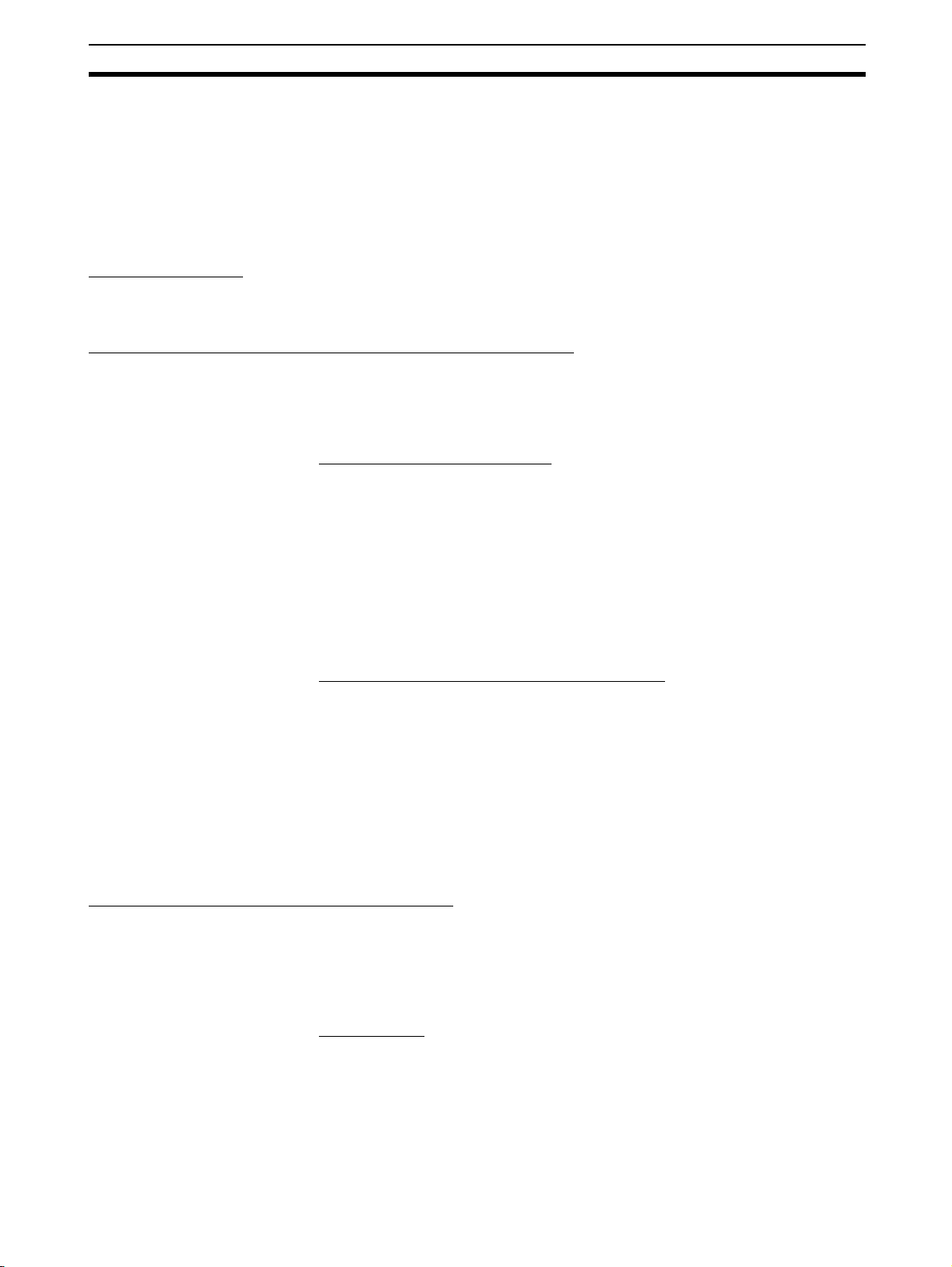
Improved Error Handling (RAS Functions)
Error Log and Data Link
Status Display
Polling Node Backup
Function
Node Bypass Function In an Optical or Optical Ring Controller Link Network, data communications
An error log enables quick handling of errors by recording the time the error
occurred and error details. The current Controller Link Unit and Support Board
status are also available, as are the data link and network status.
When an error occurs in the polling node that controls the Controller Link Network, another node automatically becomes the polling node with the help of
the Polling node backup function. This prevents an error at a single node from
influencing other nodes on the network, achieving a highly reliable system.
can be continued by bypassing the node, even when a node in the communications line malfunctions or the PC or computer power supply is turned OFF.
This prevents the whole network system from being affected by a node malfunction or power interruption.
To use the bypass node function, backup power must be supplied to the Controller Link Unit/Support Board.
6
Page 27

Overview Section 1-1
Transmission Path
Duplication
Disconnect Detection and
Notification
Node Connection
Configuration Data
Reading
In Token Ring Mode in an Optical Ring System (H-PCF cable or GI cable),
data transmission will be unaffected even by a cable or connector break at
one location in the ring connection. With the optical cable wired in a ring
shape, a break at one point will simply cause the transmission to be routed on
the other path.
Even with transmission path duplication, the network will be broken if disconnections occur in two or more places. In Token Ring Mode in an Optical Ring
System (H-PCF cable or GI cable), the location of a disconnection can be
detected and identified by means of the node status information given for all
nodes. This function can be used to prevent system crashes in advance, e.g.,
by performing maintenance when a disconnection occurs at one location.
In Token Ring Mode in an Optical Ring System (H-PCF cable or GI cable),
connection data can be read for all of the nodes in the network. The information that can be read includes the order in which the nodes are connected and
which of two optical connectors is connected to which node. Special support
software (Controller Link Support Software, Ver. 2.00 or later) is required to
read the node connection configuration data.
Using Repeater Units for T-Branches, Network Extensions, Network Expansions,
Converting Network Sections to Optical Fiber, and Device Modularization
T-Branches enable greater wiring freedom during layout, restructuring, and expansion of
networks.
Wire-to-Wire Repeater Units enable Controller Link T-Branches. T-Branches
provide the following advantages:
• Cabling can conform to the layout of equipment.
• It is possible to add nodes by adding or inserting Repeater Units at
branch points of an existing wired Controller Link system.
• If Repeater Units are installed at likely future branch points in the network
in advance, new nodes can be added by simply connecting them to these
Repeater Units.
The total length of wired networks can be extended.
At a baud rate of 2 Mbps, conventional wired networks can be up to 500 m
long. By using two Repeater Units, this can be extended to a maximum of
1.5 km.
The maximum number of nodes can be extended to 62 for wired networks.
By combining version-1 Controller Link Units/Support Boards and a Repeater
Unit, it is possible to construct networks containing up to 62 nodes.
Improved noise resistance through the use of optical cabling.
By installing two Wire-to-Optical Repeater Units, optical cabling can be used
for sections of the network that are the source of noise.
Devices can be modularized.
• Devices can be modularized according to Repeater Units, making wiring
easier when adding, removing, or modifying devices.
• When starting up devices, components can be added to the network and
debugged as they are completed.
Refer to the Controller Link Unit Operation Manual (W309) for information on
using Repeater Units.
7
Page 28
Overview Section 1-1
Features and Functions of Version-1 and CLK23 Models
The following features and functions apply to the CS1W-CLK23, CS1WCLK21-V1, CJ1W-CLK23, and CJ1W-CLK21-V1 Controller Link Units and the
3G8F7-CLK23-E and 3G8F7-CLK21-EV1 Controller Link Support Board only.
Up to 62 nodes can be connected.
Overview
When a CS1W-RPT01 Repeater Unit is used, the maximum number of nodes
that can be used in the network increases to 62. (The previous limit was 32.)
Method
Use Repeater Units and select Max Node Number set 62 in the FinsGateway
drive settings to enable a maximum of 62 nodes.
Restrictions
• The maximum of 62 nodes cannot be achieved if pre-version-1 models
are used together in the same network with version-1 models or with
CLK23 models (i.e., the CS1W-CLK23, CJ1W-CLK23, or 3G8F7-CLK23E).
• Using the maximum 62 nodes can be enabled using FinsGateway 2003.
This setting is not possible with FinsGateway version 3.@@.
Automatic data link creation is possible with 1:N allocations.
Overview
It is possible to perform unequal 1:N allocations of data between nodes with
automatic data link creation. This makes it easy to perform data links that formerly required the user to manually edit data link parameters.
The following four automatic data link creation patterns can be used:
• Equality layout (the previous pattern)
• 1:N allocation, common type
• 1:N allocation, 1 to 1 type
• 1:N allocation, chain type
This setting can be made in CS-series or CJ-series Controller Link Units.
Method
Allocation addresses and sizes are all specified using the Automatic Data Link
Creation Parameters (D30000 × Unit No. + 12 to 20) in the DM Parameter
Area. These values can be set using the CX-Net in the CX-Programmer version 3.2 or later.
Objective
This function is effective in applications that collect data from slave PCs into a
master PC.
Restrictions
• A Controller Link Support Board cannot be set as the startup node.
• These settings can be made using FinsGateway 2003. They are not possible with FinsGateway version 3.@@.
Automatic data link creation with 1:N allocations cannot be performed if preversion-1 models are used together in the same network with version-1 models or with CLK23 models (i.e., the CS1W-CLK23, CJ1W-CLK23, or 3G8F7CLK23-E).
8
Page 29
Overview Section 1-1
Change manually created data link tables during data link operation.
Overview
It is possible to modify a manually created data link table while data links are
running.
Note This is possible only with manually created data link tables. Any attempt to
change automatically created data link tables when data links are running will
fail and an error message saying that the tables cannot be edited during data
link operation will be displayed.
Method
This function can be set using the CX-Net in CX-Programmer version 3.2 or
later.
Objectives
• In systems that operate non-stop and cannot be turned OFF, this function
makes it possible to change the data link table to accommodate the addition of new nodes and to transfer data link tables without having to stop
manually set data link communications.
• If this function is combined with the use of Repeater Units to add network
nodes, it becomes possible to construct systems of greater flexibility.
Operation
When a node is being modified online, this function temporarily stops refreshing of data link data until modifications have been completed.
Nodes will participate in data links after changes to the data link table have
been completed.
Note Refer to the Controller Link Unit Operation Manual (W309) for information on
changing user-set data link tables while the data links are active.
Overview of 3G8F7-CLK23-E, 3G8F7-CLK13-E, and 3G8F7-CLK53-E Features and Functions
The 3G8F7-CLK23-E, 3G8F7-CLK13-E, and 3G8F7-CLK53-E are upwardly
compatible from the 3G8F7-CLK21-EV1, 3G8F7-CLK12-EV1, and 3G8F7CLK52-EV1, respectively.
The following data link functions have been added to the features and functions of the 3G8F7-CLK21-EV1, 3G8F7-CLK12-EV1, and 3G8F7-CLK52EV1.
All other functions and performance are the same as for the 3G8F7-CLK21EV1, 3G8F7-CLK12-EV1, and 3G8F7-CLK52-EV1.
Model number 3G8F7-CLK21-EV1,
3G8F7-CLK12-EV1, or
3G8F7-CLK52-EV1
Number of send
words per node (total
of area 1 and area 2)
Number of error log
records
1,000 words max. 4,000 words max.
39 max. 64 max.
3G8F7-CLK23-E,
3G8F7-CLK13-E, or
3G8F7-CLK53-E
When configuring a system using data links in which the number of send
words per node exceeds 1,000 words, all Controller Link Units and Support
Boards must be the CS1W-CLK@3, CJ1W-CLK@3, or 3G8F7-CLK@3-E.
When using other Controller Link Units or Support Boards together in the
same network, use a maximum of 1,000 send words per node.
9
Page 30
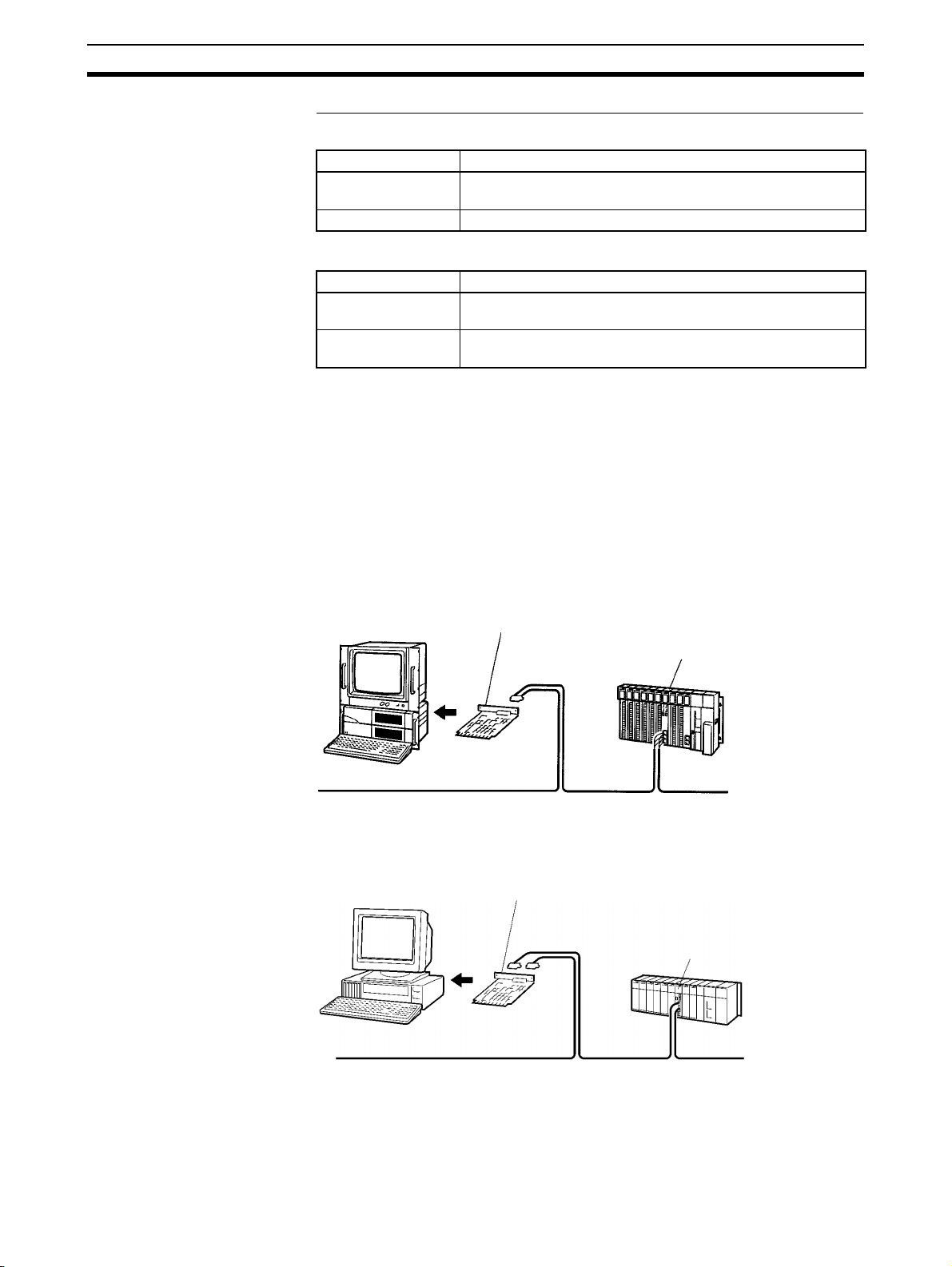
Overview Section 1-1
Controller Link Network
3G8F7-CLK21-EV1 (for PCI Bus) or
3G8F5-CLK21-E (for ISA Bus)
Controller Link Support Board
Controller Link Unit
PC
IBM PC/AT or
compatible
Optical System/Optical Ring System (H-PCF Cable) Controller Link Network
3G8F7-CLK12-EV1 (for PCI Bus) or
3G8F5-CLK11-E (for ISA Bus)
Controller Link Support Board
Controller Link Unit
PC
IBM PC/AT or
compatible
Units and Support Boards Supporting Up to 4,000 Send Words Per Node
Wired Networks
Model
Units CS1W-CLK23 (CS-series Unit)
CJ1W-CLK23 (CJ-series Unit)
Support Board 3G8F7-CLK23-E (Support Board for PCI Bus)
Optical Networks
Model
Units CS1W-CLK13 (CS-series Unit, H-PCF Cable)
Support Board 3G8F7-CLK13-E (Support Board for PCI Bus, H-PCF Cable)
CS1W-CLK53 (CJ-series Unit, GI Cable)
3G8F7-CLK53-E (Support Board for PCI Bus, GI Cable)
1-1-3 What Is a Controller Link Support Board?
A Controller Link Support Board is used to directly connect an IBM PC/AT or
compatible with an ICA or PCI bus to a Controller Link Network. A Controller
Link Support Board supports data links, a message service, and RAS functions in the same way as a Controller Link Unit.
The Support Board is mounted in an expansion slot in the computer. The following Support Boards are available depending on the type of connection
cable.
Wired System
Optical System/Optical Ring System (H-PCF Cable)
10
Page 31

Overview Section 1-1
Controller Link Unit
PC
3G8F7-CLK52-EV1 (for PCI Bus)
Controller Link Support Board
(ISA Bus is not available.)
Optical Ring System (GI Cable) Controller Link Network
IBM PC/AT or
compatible
Optical Ring System (GI Cable)
1-1-4 Features of PCI Bus Controller Link Support Boards
The Controller Link Support Board for PCI Bus can be used to configure various communications applications using FinsGateway Controller Link (PCI).
User application PLC Reporter 32,
DataFlowNavi for Access,
AIMAX-FA, etc.
C Library Compolet
FinsGateway Controller Link (PCI)
PCI Bus Controller Link Support Board
The Board is equipped with the FinsGateway Controller Link (PCI) and C
Library (Win32 DLL) as standard features. With the Board, user applications
can be created using the C language (Microsoft Visual C++ .NET 2003,
Microsoft Visual C++ Ver. 6.0). An overview of how to use the C Library is
described later in this manual.
SYSMAC Compolet Version 2 provides ActiveX controls for PC communications. User applications can be created more easily using Microsoft Visual
Basic. PLC Reporter 32, DataFlowNavi for Access, and AIMAX-FA are software packages of communications middleware. These software packages
must be purchased separately. For details, refer to the manual for the appropriate software.
1-1-5 Outline of PCI Bus Controller Link Support Board Functions
Data Links Controller Link Support Board data link data is stored in the event memory in
the computer. Event memory is shared memory with names such as DM or
CIO, and is stored in the computer memory. Event memory recreates virtually
the DM Area and CIO Area of a PC.
Event memory can be written or read by executing the C Library data link data
read/write functions ClkWriteDatalink( ) and ClkRead Datalink( ) from the user
program.
11
Page 32

Overview Section 1-1
Computer
User application
ClkWriteDatalink( )
ClkReadDatalink( )
CIO DM
Event
memory
FinsGateway Data link
Controller Link Support Board
PC
Controller Link Network
Computer
User application
Controller Link Support Board
Controller Link Network
ClkSendFins( )
ClkRecvFins( )
FinsGateway
Controller Link (PCI) Embedded Edition
PC
Message Service FINS commands and FINS responses can be sent and received for specified
nodes on the network by executing FINS message send/receive functions
ClkSendFins( ) and ClkRecvFins( ) from the user program.
A maximum of 4 PCI Bus Controller Link Support Boards can be mounted to
one computer. Consequently, multiple user applications can be executed
simultaneously.
12
Page 33

Specifications and Configurations Section 1-2
Computer
User application
User application
FinsGateway
Controller Link (PCI) Embedded Edition
Controller Link
Support Board
PC
Controller Link Network
Controller Link
Support Board
C
P
U
CJ1W-CLK21-V1
Controller Link Unit
CJ-series PC
IBM PC/AT or
compatible
Twisted-pair cable
3G8F7-CLK21-EV1
Controller Link
Support Board
C200HW-CLK21
Controller Link Unit
CVM1-CLK21
Controller Link Unit
C200HX/HG/HE
PC
CVM1, CV-series
PC
CQM1H-CLK21
Controller Link Unit
CQM1H-series
PC
C
P
U
C
P
U
C
P
U
C
P
U
CS1W-CLK21-V1
Controller Link Unit
CS-series
PC
1-2 Specifications and Configurations
1-2-1 System Configuration
Wired System
(Twisted-pair Cable)
Wired Systems are supported by CS-series, CJ-series, C200HX/HG/HE,
CVM1, and CV-series PCs.
13
Page 34

Specifications and Configurations Section 1-2
C
P
U
C
P
U
C
P
U
C
P
U
CVM1/CV-series PCCS-series PC
Backup
power supply
(24 VDC)
Personal computer
3G8F7-CLK12-EV1
Controller Link Support Board
for PCI Bus (token ring mode)
H-PCF Optical fiber cable
(ring connection)
CS1W-CLK12-V1
Controller Link Unit
(token ring mode)
CVM1-CLK12
Controller Link Unit
(token ring mode)
CVM1-CLK12
Controller Link Unit
(token ring mode)
CS1W-CLK12-V1
Controller Link Unit
(token ring mode)
CVM1/CV-series PCCS-series PC
C
P
U
Backup
power supply
(24 V DC)
C
P
U
C
P
U
3G8F7-CLK12-EV1
Controller Link
Support Board
for PCI Bus
(token bus mode)
CS1W-CLK12-V1
Controller Link Unit
(token bus mode)
CS1W-CLK11
Controller Link Unit
CVM1-CLK12
Controller Link Unit
(token bus mode)
CS-series PC CS-series PC
CVM1/CV-series
PC
Personal computer
H-PCF Optical
fiber cable
(daisy chain
connection)
3G8F5-CLK11
Controller Link
Support Board for
ISA Bus
Personal
computer
PC/AT or
compatible
Optical Bus or Optical
Ring System
(H-PCF Cable)
Optical Systems are supported by CS-series, CVM1, and CV-series PCs.
Token Ring Mode
Token-bus Mode
14
Page 35

Specifications and Configurations Section 1-2
C
P
U
C
P
U
C
P
U
C
P
U
Backup
power supply
(24 VDC)
3G8F7-CLK52-EV1
Controller Link
Support Board
for PCI Bus
(token ring mode)
GI Optical fiber cable
(ring connection)
CS-series PC CVM1/CV-series PC
CS-series PC CVM1/CV-series PC
Personal computer
CS1W-CLK52-V1
Controller Link Unit
(token ring mode)
CVM1-CLK52
Controller Link Unit
(token ring mode)
CS1W-CLK52-V1
Controller Link Unit
(token ring mode)
CVM1-CLK52
Controller Link Unit
(token ring mode)
C
P
U
Backup
power supply
(24 VDC)
C
P
U
C
P
U
3G8F7-CLK52-EV1
Controller Link
Support Board
for PCI Bus
(token bus mode)
CS1W-CLK52-V1
Controller Link Unit
(token bus mode)
CS1W-CLK52-V1
Controller Link Unit
(token bus mode)
CVM1-CLK52-V1
Controller Link Unit
(token bus mode)
CS-series PC CS-series PC
CVM1/CV-series
PC
Personal computer
GI Optical fiber cable
(daisy chain
connection)
Optical Bus or Optical
Ring System (GI Cable)
Optical Systems are supported by CS-series, CVM1, and CV-series PCs.
Token Ring Mode
Token-bus Mode
1-2-2 PCI Bus Controller Link Support Board Models
Note A maximum of 4 PCI Bus Controller Link Support Boards can be mounted.
(Different types of system can be mounted simultaneously.) PCI Bus Controller Link Support Boards can also be used with ISA Bus Controller Link Support Boards. If PCI Bus and ISA Bus Controller Link Support Boards are used
together, however, a separate ISA Bus FinsGateway Controller Link Driver is
required.
H-PCF cable optical ring Controller Link Support
GI cable optical ring 3G8F7-CLK53-E
Twisted-pair Cable 3G8F7-CLK23-E
System Product Model
3G8F7-CLK13-E
Board for PCI Bus
3G8F7-CLK12-EV1
3G8F7-CLK52-EV1
3G8F7-CLK21-EV1
15
Page 36

Specifications and Configurations Section 1-2
1-2-3 Communications Specifications
Optical Ring System (Joint Ring/Daisy Chain Connections)
Items Specifications
Type Optical ring, H-PCF cable Optical ring, GI cable
Model 3G8F7-CLK13-E
3G8F7-CLK12-EV1
Communications method N:N token-ring method (Token Ring Mode)
N:N token-bus method (token-bus mode)
Code Manchester code
Modulation Baseband code
Synchronization Flag synchronization (conforms to HDLC frames)
Transmission path format Ring method (Token Ring Mode)
Transmission speed 2 Mbps
Maximum transmission distance
Maximum distance
between nodes
Medium H-PCF cable (optical two-core cable) GI cable (optical two-core cable, 62.5/
Node connection method Connected via a special (full-lock connector)
Maximum number of nodes 62 nodes (See notes 2 and 3.)
Communications functions Data links and message service
Number of data link words Transmission area per node:
Data link areas FinsGateway Event Memory
Message length 2,012 bytes max. (including the header)
RAS functions Polling node backup function
Error control Manchester code check
Daisy-chain method (token-bus mode)
20 km 30 km
Crimp cut: 800 m
Adhesive: 1 km (See note 1.)
connector. (A half-lock connector can also be
used.)
3G8F7-CLK13-E and 3G8F7-CLK53-E: 4,000 words max.
3G8F7-CLK12-EV1 and 3G8F7-CLK52-EV1: 1,000 words max.
Number of data link words that can be used in one network (total transmission):
62,000 words max. (See note 3.)
Self-diagnosis function (hardware checking at startup)
Echoback test and broadcast test (using the FINS command)
Watchdog timer
Error log function
Node bypass function
Transmission path duplication (For ring method in Token Ring Mode only.)
Disconnect detection and notification (Token Ring Mode only.)
Node connection configuration data reading (For ring method in Token Ring Mode only.)
CRC check (CCITT X16 + X12 + X5 + 1)
3G8F7-CLK53-E
3G8F7-CLK52-EV1
62.5/125 μm: 2 km
50/125 μm: 1 km
125 μm or 50/125 μm)
Connected via ST connectors.
16
Note 1. The maximum distance between nodes depends on the connector and ca-
ble processing methods.
2. With the token-bus method, the maximum number of nodes in an Optical
Bus System with optical bus nodes (i.e., model numbers ending in CLK11)
is 32 (node addresses 1 to 32).
3. The maximum number of words in an Optical System with optical bus
nodes (i.e., model numbers ending in CLK11) is 32,000 words.
Page 37

Specifications and Configurations Section 1-2
Wired System
Items Specifications
Type Wired
Model 3G8F7-CLK23-E
Communications method N:N token bus
Code Manchester code
Modulation Baseband code
Synchronization Flag synchronization (conforms to HDLC frames)
Transmission path form Multi-drop bus
Baud rate and maximum
transmission distance
Media Specified shielded twisted-pair cable
Node connection method Connect with provided connector
Maximum number of nodes 32 nodes or 62 nodes
Communications functions Data links and message service
Number of data link words Transmission area per node: 3G8F7-CLK23-E: 4,000 words max.
Data link areas FinsGateway event memory
Message length 2,012 bytes max. (including the header)
RAS functions Polling node backup function
Error control Manchester code check
3G8F7-CLK21-EV1
The maximum transmission distance varies with the baud rate as follows:
2 Mbps: 500 m
1 Mbps: 800 m
500 Kbps: 1 km
Number of signal lines: 2, shield line: 1
3G8F7-CLK21-EV1: 1,000 words max.
Number of data link words in one network (send/receive: 32,000 words max., but 62,000
words max. if the maximum of 62 nodes is used)
Self-diagnosis function (hardware checking at startup)
Inter-node test and broadcast test (using the FINS command)
Watchdog timer
Error log function
16
CRC check (CCITT X
+ X12 + X5 + 1)
Note At least one Repeater Unit is required to construct networks that uses a node
address higher than 32. The following Controller Link Units/Support Boards
must also be used, and the Wired Network 62 Node Enable Bit of the DM
Parameter Area software switch of all nodes must be turned ON (62 nodes
max.).
CS1W-CLK23, CS1W-CLK21-V1, CJ1W-CLK23, CJ1W-CLK21-V1,
3G8F7-CLK23-E, and 3G8F7-CLK21-EV1
17
Page 38

Specifications and Configurations Section 1-2
(Unit: mm)
1-2-4 General Specifications
Items Controller Link Support Board for PCI Bus
Wired system:
3G8F7-CLK23-E
3G8F7-CLK21-EV1
External dimensions 106 × 140 mm (W × L)
Weight 104 g 120 g (excluding mounting
Current consumption 0.35 A max. at 5 VDC Without power supply:
Installation environment
conditions
Same as for computer.
Optical system,
H-PCF cable:
3G8F7-CLK13-E
3G8F7-CLK12-EV1
bracket)
0.54 A max. at 5 VDC
With power supply:
0.35 A max. at 5 VDC
Optical system,
GI cable:
3G8F7-CLK53-E
3G8F7-CLK52-EV1
124 g (excluding mounting
bracket)
Without power supply:
0.60 A max. at 5 VDC
With power supply:
0.35 A max. at 5 VDC
1-2-5 Dimensions
Wired Models (3G8F7-CLK23-E and 3G8F7-CLK21-EV1)
18
Page 39

Specifications and Configurations Section 1-2
(Unit: mm)
H-PCF Cable Optical Ring Models
(3G8F7-CLK13-E and 3G8F7-CLK12-EV1)
GI Cable Optical Ring Models
(3G8F7-CLK53-E and 3G8F7-CLK52-EV1)
155 (163)
155 (163)
Note The dimensions given in parentheses are for when the previous connector is
mounted.
19
Page 40

Specifications and Configurations Section 1-2
Optical Ring System
(H-PCF Cable and GI Cable)
Wired System
1-2-6 Indicators
Name Color Status Explanation
RUN Operating Green Lit The Board is operating normally.
Not lit A Board operating error (watchdog timer error) has occurred.
ERR Error Red Lit One of the following errors has occurred.
Communications error
Node address setting error (duplicate setting)
Optical system connection error
EEPROM error
Hardware error
Data link table error
Routing table error
Network parameter error
Not lit Operating normally (no errors in the setting tables).
INS Participating in
network
LNK Sending data
link
PS (See
note 1.)
TER
(See
note 2.)
Power supply ONGreen Lit Backup power supply is ON.
Terminating
resistance setting
Yellow Lit Participating in network.
Not lit Not participating in network.
Yellow Lit Sending data link (participating in data link)
Flashing Error in the data link table settings.
Not lit Data link is stopped or Unit is not participating in data link.
Not lit Backup power supply is OFF.
Yellow Lit Terminating resistance switch is ON (resistance is connected).
Not lit Terminating resistance switch is OFF (resistance is not connected).
1-2-7 Product Components
System Model Contents
Wired system 3G8F7-CLK23-E
Optical ring system,
H-PCF cable
Optical ring system,
GI cable
20
Note 1. The P/S indicator is mounted to the Optical Ring Units only.
2. The TER indicator is mounted to the Wired Units only.
Controller Link Support Board × 1
3G8F7-CLK21-EV1
3G8F7-CLK13-E
3G8F7-CLK12-EV1
3G8F7-CLK53-E
3G8F7-CLK52-EV1
CD-ROM × 1
Installation guide × 1
Communications connector × 1
Board ID switch number/indicator label × 1
User registration card (software license agreement) × 1
Controller Link Support Board × 1
CD-ROM × 1
Installation guide × 1
Optical cable bracket × 1
Power supply connector × 1
Board ID switch number/indicator label × 1
User registration card (software license agreement) × 1
Note 1. The following software is supplied on the CD-ROM.
• FinsGateway Version 2003 (PCI-CLK Edition)
• FinsGateway Version 3 (PCI-CLK Edition)
Page 41

Specifications and Configurations Section 1-2
Software
Hardware
User application
C Library
Controller Link Support Board
FinsGateWay
FinsGateway
utilities
• Setup Diagnostic Utility
• C Library
2. The DOS operating system for an IBM PC/AT or compatible is not provided
with the Support Board. The operation system must be acquired separately.
1-2-8 Software Configuration
Note A CLK data link setting utility is included in the FinsGateway utilities. Make the
data link table settings for the Board using this utility. For details, refer to FinsGateway online help.
1-2-9 Applicable Computers, Operating Systems, and Libraries
The following table lists the operating environment for Controller Link Support
Boards for PCI Bus connections.
Compatible computers FinsGateway
IBM PC/AT or compatible
• CPU: Intel Celeron 400 MHz or
better
• Main memory: 128 MB minimum
• 1 or more PCI bus slots
(PCI bus revision 2.0 or later, power supply: 5 V)
• Free hard disk space: 70 MB min.
(not including user applications)
• CD-ROM drive:
One required for software installation
• Display:
VGA (640 × 480 (pixels) min.)
(Other conditions conform to the
OS.)
FinsGateway
Version 2003
Note 1. There are two versions for FinsGateway (Version 2003 and Version 3) pro-
2. When using Windows NT 4.0 (service pack 3 or later), Windows ME, or
3. Use FinsGateway Version 2003.21 or higher to use up to 4,000 data link
version
• Windows 10 Professional (32 bit)
• Windows 10 Enterprise (32 bit)
• Windows 10 Home (32 bit)
• Windows 8.1 Professional
• Windows 8.1 Enterprise (32 bit)
• Windows 8.1 (32 bit)
• Windows 8 Professional (32 bit)
• Windows 8 Enterprise (32 bit)
• Windows 8 (32 bit)
• Windows 7 Professional (32 bit)
• Windows 7 Home Premium
• Windows Vista Business
• Windows Vista Home Premium
Compatible OS Compatible language
Microsoft Visual C++ Ver. 6.0
(Service Pack 3)
Microsoft Visual C++ .NET
2003
(32 bit)
(32 bit)
(When using the C language
library provided in the CDROM with the product)
vided on the CD-ROM that comes with the product. The applicable OS depends on the version of FinsGateway.
Windows 98SE, install FinsGateway Version 3. Using version 3 of the
FinsGateway, however, with disable the following functions supported by
version-1 Controller Link Support Boards for PCI Bus: Automatic 1:N data
link allocations, changing data link tables while data links are active, and
using 62 wired nodes. Maximum number of data link send words per node:
4,000
send words per node.
21
Page 42

Basic Procedures Section 1-3
4. FinsGateway version 2003.40 is required to use Windows 10 (32 bit), Windows 8 (32 bit), Windows 8.1 (32 bit), Windows 7 (32 bit) or Windows Vista.
(The version of FinsGateway that is installed can be confirmed by starting
the FinsGateway Settings program and checking the product information
provided on the Info Tab Page.)
FinsGateway version Automatic allocation
of 1:N data link
tables
FinsGateway Version
2003
FinsGateway Version 3 Not supported. Not supported. Not supported. Not supported.
Supported. Supported. Supported. Supported.
Setting 62 wired
nodes
Changing data link
tables with active
data links
Maximum number of
data link send words per
node: 4,000
(FinsGateway Version
2003.21 or higher)
5. A Controller Link Support Board cannot be used with Windows 95 or Windows NT 3.51 or earlier.
6. Controller Link Support Boards for PCI Bus connection may not operate
correctly when used with other computers or operating systems. Always
use the Controller Link Support Board with a personal computer and OS
that satisfy the above conditions.
7. Controller Link Support Boards conform to PCI Local Bus Specifications,
Revision 2.0.
8. User applications can also be written with Microsoft Visual Basic Version
6.0 if the optional SYSMAC Compolet Version 2 is purchased.
9. User applications can also be written with Microsoft Visual Basic .NET or
Microsoft Visual Basic .NET 2003 if the optional SYSMAC Compolet Version 2003 is purchased. SYSMAC Compolet Version 2003 can be used
only with FinsGateway 2003. Microsoft .NET framework 1.0 or 1.1 is required to use SYSMAC Compolet Version 2003. Refer to the operation
manual for SYSMAC Compolet Version 2003 for details.
1-3 Basic Procedures
Initial Procedure Refer to the Controller Link Support Board Installation Guide for information
on the first three steps in the following procedure.
1,2,3... 1. Set the Board ID on the Board switch.
2. Install the Board into the computer.
3. Install the software.
4. Wire and connect the cables.
5. Perform the following data link and/or message service procedure.
Data Link Procedure
1,2,3... 1. Create data link tables using the Controller Link Support Software or the
FinsGateway utilities, and transfer the data to the Board.
Note When the data link tables and routing tables are transferred to the
Controller Link Support Board, they are saved in backup memory
(EEPROM) on the Board. It is not necessary to set the data again
when the power is turned OFF and ON.
2. Read and write to the data link area using the utility applications that use
the C Library.
Note The data links can also be started by sending the data link activa-
tion command of the FINS message service, or by using a PC software switch operation.
22
Page 43

Applications Precautions Section 1-4
Lot No.: @ @ 5 6 . . . . Manufactured in May 1996
Indicates the last digit of the manufacturing
year. In this example, the year is 1996.
Indicates the month of manufacture. October,
November, and December are indicated by x, y,
and z respectively. In this example, the month is
May.
Message Service
Procedure
1,2,3... 1. Create routing tables using the Controller Link Support Software or the Fin-
sGateway utilities, and transfer the tables to the Board.
Note When the data link tables and routing tables are transferred to the
Controller Link Support Board, they are save in backup memory
(EEPROM) on the Board. It is not necessary to set the data again
when the power is turned OFF and ON.
2. Send and receive FINS messages using the utility applications that use the
C Library.
1-4 Applications Precautions
Board ID Switch If more than one Controller Link Support Board is mounted to a computer,
make sure that the same Board IDs is not set for more than one Board. Up to
4 Boards can be mounted.
Note Refer to the Controller Link Support Board Installation Guide
(W467).
Terminating Resistance
Switch (Wired Systems
Only)
Turn ON the terminating resistance switch only for the nodes at both ends of a
wired Controller Link Network and turn OFF the switch for all other nodes.
Note Refer to the Controller Link Support Board Installation Guide
(W467).
Cables Turn OFF the power of all the nodes on the network before connecting or dis-
connecting a cable.
Note Refer to SECTION 2 Wiring.
Use the specified cable only.
Note Refer to 1-2 Specifications and Configurations.
Baud Rates (Wired
Systems Only)
Set the same baud rate for all nodes on the same network.
Note Refer to the Controller Link Support Board Installation Guide
(W467).
Routing Tables When a CV-series PC is connected to the network, set routing tables at all the
nodes.
Note Routing tables are not required if all the CV-series CPU Units in the Controller
Link Network have been manufactured on or after May 1996. The manufacturing date can be determined from the four-digit lot number on the side of the
CPU Unit.
Data Links When using a manually set data link, delete the data link tables from all nodes
Set routing tables at all the nodes in all the networks when multiple networks
are connected to one PC.
Note Refer to SECTION 7 Network Interconnections.
When a routing table is transferred (written) to a PC, all CPU Bus and Communications Units are reset. The routing tables must not be transferred to a
PC while the system is running.
not participating in the data link.
23
Page 44

Applications Precautions Section 1-4
The polling node must not be restarted or reset during data link operation.
If the Controller Link Support Board is the polling node and data links are
operating on the network, do not open the Board for three seconds after closing the Board.
If the Controller Link Support Board is the polling node and data links are
operating on the network, do not add the Board to the network for three seconds after leaving the network.
Precautions when
Connecting Nodes Using
a Repeater Unit
When data links are active in the existing network, check the following items
before adding nodes to the network. If the inappropriate data link tables or
parameters are set, the system may not operate properly.
• If the new node will participate in user-set data links, make sure that the
appropriate data link tables are set in the corresponding nodes.
• If the new node will not participate in user-set data links, make sure that
the data link tables of the corresponding nodes are deleted.
• If automatic settings are used, make sure that the appropriate DM Area
parameters have been set.
Before adding nodes, check user programming for the existing network to
confirm that the new data transmissions created by adding new nodes can be
performed. If the ladder program is not suitable, the system may not operate
properly.
Make sure that the node addresses of the new nodes are not already being
used by other nodes in the same network. If the same node address is used
by more than one node, a node duplication error will be detected when the
node is added, communications will stop, and the node with the same
address will not be able to the join the network. Data may also be unexpectedly received from the incorrectly set node. To restore a Controller Link System with a duplicated address, reset the node address correctly, then turn ON
the power to the corresponding PCs again, or restart the Controller Link Support Boards and Units.
Always set the baud rate of the new nodes and the Repeater Unit to the same
baud rate used for the existing network. If a different baud rate is set when
adding a new node, the communications for the whole network including the
existing network will be unstable and communications errors will occur.
Set the terminating resistance of the new nodes to the Repeater Unit as
shown in the following diagram. If terminating resistance is set incorrectly,
communications errors may occur.
• Adding Nodes Using T-branch Lines
24
System Configuration after Adding Nodes
Terminating
resistance ON
CS1W-RPT01
Repeater Unit
Turn ON terminating resistance at the
nodes on both ends of each segment
shown within broken lines.
Terminating
resistance ON
Terminating
resistance ON
Newly added nodes
Terminating
resistance ON
Page 45

Applications Precautions Section 1-4
Terminating
resistance ON
Terminating
resistance ON
Terminating
resistance ON
CS1W-RPT01
Repeater Unit
Newly added nodes
Terminating
resistance ON
Turn ON terminating resistance at
the nodes on both ends of each
segment shown within broken lines.
• Adding Nodes with a Repeater Unit at One End
Before connecting the new nodes to the existing network, always set the polling/polled node setting in the Controller Link Support Board driver properties
to Polled. If the nodes are connected to the existing network with this setting
set to Polling, the corresponding node may become the polling node for the
network, which will affect the network in the following ways. After the new
nodes are participating in the network normally, return the polling/polled node
setting to polling node.
• When the data link startup switch of the new node is OFF, all the data
links for the whole network including the existing network will be inactive.
• When the network parameters being used are different from the default
values, the network parameters will return to the default values.
After confirming that the new node has properly joined the network, set the
polling/polled node setting in the Controller Link Support Board driver properties to Polling.
Always set the Max Node Number set 62 option in the Controller Link Support
Board driver properties of the new node to match the settings of the existing
network. If different settings are used, the network may not be configured correctly.
When a new node is to be added to a system that is already wired over a long
distance using T-branch lines or Repeater Units, turn OFF the power to the
PCs in the segment where the node is to be added. The power to the PCs in
segments separated by Repeater Units does not need to be turned OFF.
Refer to the Controller Link Unit Operation Manual (W309).
Systems with an Existing T-branch Line
CS1W-RPT01
Repeater Unit
The power to the PCs of the segment
shown within the dot-dash broken
line does not need to be turned OFF.
The power to the PCs in the
segment shown within the dash
broken line must be turned OFF.
New node to be added
25
Page 46

Applications Precautions Section 1-4
New node to be added
The power to the PCs of the segment
shown in the dot-dash broken line
does not need to be turned OFF.
The power to the PCs in the
segment shown in the dash broken
line must be turned OFF.
CS1W-RPT01
Repeater Unit
Systems Wired with an Existing Repeater Unit
Others Precautions Observe the following precautions.
• The Controller Link Support Board can be used only with the specified
OS.
Note Refer to 1-2 Specifications and Configurations.
• Set the IRQ (interrupt request) of the Controller Link Support Board so
that it does not overlap with other resources.
Note Refer to the Controller Link Support Board Installation Guide
(W467).
• If using the SEND, RECV, and CMND instructions with a PC on which the
routing tables have been set, be sure to specify the network address set
in the routing tables.
• If using an Optical Ring System, the same type of transmission path must
be set for all nodes. If the transmission path node settings are different,
the network will not be configured correctly.
• Wired Systems cannot be used together with Optical or Optical Ring Systems.
• If using Optical System Units (model numbers ending in CLK11) and HPCF Cable Optical Ring System models (model numbers ending in
CLK12, CLK12-EV1, or CLK13-E) together, observe the following precautions.
• The transmission paths for the H-PCF Cable Optical Ring System
Units must be set to Token Bus Mode for all nodes. If the transmission
path settings are different, the network will not be configured correctly.
• Set node addresses from 1 to 32 for all nodes.
• Set the polling node/polled node software switches for all the Optical
Ring System Units for the polled node. If an optical ring node is the
polling node when the network is started, the maximum node address
in the network parameters will be set to 62, and the Network Parameter Error (ERH) indicators on the Optical System Units will light.
• GI Cable Optical Ring System Units (model numbers ending 3G8F7CLK53-E, and 3G8F7-CLK52-EV1) cannot be used together with Optical
System Units (model numbers ending CLK11) or H-PCF Cable Optical
Ring System Units (model numbers ending 3G8F7-CLK13-E, and 3G8F7CLK12-EV1).
• If using ring wiring, connect the nodes in node address order (i.e., node 1,
node 2.... node 62, node 1) as much as possible to reduce the effect on
communication time if a wire breaks. For details on communications time,
refer to 8-2 Communications Cycle Time.
26
Page 47

Applications Precautions Section 1-4
• To construct a network that uses a node address higher than 32, it is necessary for all nodes to be one of the following Units: 3G8F7-CLK21-EV1,
CS1W-CLK23, CJ1W-CLK23, CS1W-CLK21-V1, CJ1W-CLK21-V1, or
3G8F7-CLK23-E.
In addition, the Wired Network 62 Node Enable Bit in the DM Parameter
Area software switches of all nodes must turned ON to enable 62 nodes
maximum. With the 3G8F7-CLK23-E and 3G8F7-CLK21-EV1, make sure
that Max Node Number set 62 is selected in the FinsGateway driver properties. If different settings are specified, the network will not be correctly
configured.
•The Max Node Number set 62 DM Parameter Area software switch for
the CS1W-CLK23-E, CS1W-CLK 21-EV1, CJ1W-CLK23-E, and CJ1WCLK 21-EV1 Units is enabled when the power is turned ON again.
• When using automatic data link creation with 1:N allocation, all nodes
must be following Units/Boards. Other models cannot participate in data
links that employ 1:N allocations.
Wired Networks CS1W-CLK23, CJ1W-CLK23, 3G8F7-CLK23-E,
CS1W-CLK21-V1, CJ1W-CLK21-V1, and 3G8F7-CLK21-EV1
Optical Ring Networks
using H-PCF Cable
Optical Ring Networks
using GI Cable
CS1W-CLK13, 3G8F7-CLK13-E,
CS1W-CLK12-V1 (See note.), and 3G8F7-CLK12-EV1
CS1W-CLK53, 3G8F7-CLK53-E,
CS1W-CLK52-V1 (See note.), and 3G8F7-CLK52-EV1
Note Lot numbers 030601 or later.
• If the total number of data link words is increased, the PLC cycle time and
the communications cycle time will be increased. In that case, observe
the following precautions.
• Check to make sure that it will not cause problems if performance in
responses to external devices is reduced.
• In message communications, extending the communications cycle
time may result in timeout errors waiting for responses.
In that case, lengthen the response monitor time as described below.
SEND, RECV, and CMND instructions:
Response monitor time setting area for local node control data.
For details, refer to 6-1 Introduction.
PLC Programming Devices:
PLC Programming Device Response Timeout setting
For details on settings, refer to the operation manual for the PLC
Programming Device that is being used.
27
Page 48

Applications Precautions Section 1-4
Example: CX-Programmer Response Timeout Setting
28
Page 49

SECTION 2
Wiring
This section describes how to wire the power supply cables and communications cables to the Controller Link Support
Board.
2-1 Connecting Wired Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2-1-1 Devices Required for Connection . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2-1-2 Communications Cable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2-1-3 Connecting Cables to Communications Connectors . . . . . . . . . . . . 31
2-1-4 Connecting the Connector to the Board. . . . . . . . . . . . . . . . . . . . . . 34
2-2 Connecting H-PCF Cable Optical Ring System Cables. . . . . . . . . . . . . . . . . 35
2-2-1 Communications Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2-2-2 Optical Fiber Cables (H-PCF Cables) . . . . . . . . . . . . . . . . . . . . . . . 37
2-2-3 Installing Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2-3 Optical Ring System (GI Cable) Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2-3-1 Communications Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2-3-2 GI Optical Fiber Cable Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2-3-3 Installing Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2-4 Backup Power Supply Wiring (Optical Ring Systems Only) . . . . . . . . . . . . 46
2-4-1 Backup Power Supply Specifications . . . . . . . . . . . . . . . . . . . . . . . 46
2-4-2 Connecting the Backup Power Supply. . . . . . . . . . . . . . . . . . . . . . . 47
29
Page 50

Connecting Wired Systems Section 2-1
Shield Shield
BD L BD L
BD H
2-1 Connecting Wired Systems
This section describes the methods for wiring network communications cables
to the Controller Link Support Board (3G8F7-CLK23-E and 3G8F7-CLK21EV1).
2-1-1 Devices Required for Connection
The Wired Controller Link System uses the shielded twisted-pair cable specified below.
Model Manufacturer
ESVC 0.5X2C-13262 Bando Densen Co.
ESNC 0.5X2C-99-087B Nihon Electric Wire & Cable Co.
ESPC 1PX0.5 mm
Note 1. Be sure to use the communications cable described above.
2. If another communications cable is used, normal operation cannot be assured.
3. For manufacturers of the specified cable, refer to the appendix, Standard
Models.
2-1-2 Communications Cable
2
Nagaoka Electric Wire Co.
Wire the communications cable to connect identical signals.
Note 1. Use the cable specified for the communications cable.
2. Keep communications cable separated from power lines or a high-tension
lines to prevent influences from electronic noise.
3. Ground the shield line of the communications cable at one end of the network. Do not ground the shield at both ends.
4. Do not connect the shield cable of the communications cable to a ground
that is also being used for power-system devices, such as inverters.
5. Turn ON the terminating resistance switch at the nodes at both ends of the
network to connect terminating resistance. Turn OFF the terminating resistance switch at all nodes.
6. Do not run wiring outdoors. If outdoor wiring is necessary, take protection
measures against lightning, such as underground wiring or wiring inside
pipes.
7. The minimum length of the communications cable between nodes is 1 m.
Prepare the communications cables at a length of 1 m or more.
8. Use the multidrop method for connecting nodes. Normal communications
will not be possible with T branches.
9. Terminals for the same signal on the connector are connected internally in
the Controller Link Support Board.
30
10. Although this section discusses wiring Controller Link Support Boards
only, a Controller Link Unit could take the place of any Board and can be
connected in the same fashion as a Board.
Page 51

Connecting Wired Systems Section 2-1
End Board
Terminating
resistance ON
Intermediate Board
Terminating
resistance OFF
Ground
End Board
Terminating
resistance ON
End Board
Approx. 50 mm
11. The ground wire connected to the connector of a Controller Link Support
2
Board must be 2.5 mm
Connect all the shield lines of the communication cables and then ground the
shield at one end of the network. The wiring method is shown below.
Note The terminals of the same type are connected internally. Connections can
thus be made to either the right or left half of the end Boards.
or less.
Refer to the Controller Link Unit Operation Manual (W309) for information on
wiring Repeater Units.
2-1-3 Connecting Cables to Communications Connectors
When connecting a communications cable to a Controller Link Support Board,
connect the cable to the attached connector first and then attach to the connector on the Board. Connect the communications cable to the connector
using the following procedure.
1,2,3... 1. Peel back the cover of the cable for about 50 mm without scratching the
mesh of the shield. Do not peel too much because it may cause a shortcircuit.
2. Twist the mesh of the shield to form a line on the end on which the shield
is to connected to a node.
3. Apply a heat-shrink tubing to the twisted shield line, leaving enough bare
wire to attach the crimp terminal.
31
Page 52

Connecting Wired Systems Section 2-1
Wire created by
twisting the shield
Cover with a
heat-shrink tubing
Leave enough exposed
wire to attach the terminal.
Apply vinyl tape or
a heat-shrink tubing.
Crimp terminal
Cable
Note (a) Turn OFF the power supply to the computer before connecting
the communications cable or connecting/disconnecting a connector.
(b) Use the connector attached to a Controller Link Support Board.
4. Strip the insulation far enough to attach the crimp terminals and twist the
wire strands tight.
5. Apply electrical tape or heat-shrink tubing to the end of the cable cover that
was peeled in step 1
6. Attach the crimp terminals to the shield wire and signal wires. Apply electrical tape or heat-shrink tubing to the connections.
Note We recommend the Phoenix AI-series crimp terminals shown in the
following diagram. The Phoenix Company’s ZA3 crimping tool can
be used to attach these terminals.
7. Carefully insert the signal line and shield line into each hole of the connector. Insert as marked on the connector. The following example shows connection to a Board in the middle of the Network.
32
Page 53

Connecting Wired Systems Section 2-1
S
S
BD L
BD H
Shield lines
Small flat-blade
screwdriver with a
constant width
S
S
Note (a) Loosen the screws in the connector enough to allow the terminal
to pass before inserting the signal line. If the screw is not loosened, the signal line will go completely into the connector and you
will not be able to secure the line.
(b) Attach crimp terminals to the wires. Never connect a bare power
supply wire directly into the connector.
(c) Marks are provided on the connector for the signal lines. Connect
the signal lines according to the marks. The marks correspond to
signal lines as listed below.
Marking Signal name Line color
■ BD H (communication data high side) Black
@ BD L (communication data low side) White
S SHLD (shield) ---
(d) The lines can be connected to either the right or left half of the
connector at the node at either end of the network.
(e) The shield wire connections are different if grounding each node
individually. Refer to 2-1-2 Communications Cable to connect the
shield wire to the connector.
8. Firmly secure each signal line with the signal line screw on the connector.
An ordinary flat-blade screwdriver with a tip that tapers at the end is not
suitable because it cannot be inserted far enough. Use a small flat-blade
screwdriver with a constant width. The appropriate tightening torque is 0.2
N·m.
Note The following screwdriver is available from OMRON.
Model: XW4Z-00C
33
Page 54

Connecting Wired Systems Section 2-1
Side Front
0.6 mm
3.5 mm
S
S
Controller Link Support Board
Communications disabled
Connector
Network split
(communications disabled).
2-1-4 Connecting the Connector to the Board
Connect the connector on the communications cable to the connector on the
Board using the following procedure.
1,2,3... 1. Connect the connector on the communications cable to the connector on
the Board as shown below.
Note 1. If the connector is disconnected, communications for the Board that was
2. Secure the connector to the Board by tightening the screws on the connector. The appropriate tightening torque is 0.2 N·m.
disconnected with other nodes in the network will be disabled and the network will be split into two at point of disconnection. Utmost care is necessary to prevent disconnection of a connector during communications.
2. Do not pull on a communication cable.
3. When bending a communications cable, allow 60 mm or more for the
bending radius (R).
34
4. Do not place heavy objects on the communications cable.
Page 55

Connecting H-PCF Cable Optical Ring System Cables Section 2-2
S3200-H@@@@@@@
Tensioner option
None: Standard (with tension member)
N: Without tension member
Cable length
@@@
A B
(A/10) x 10
B
m
Cable color
B: Black
O: Orange
Cable specification
L: With power supply line
C: Without power supply line
Type
B: Cord
C: Cable
5. Supply power only after checking the wiring thoroughly.
2-2 Connecting H-PCF Cable Optical Ring System Cables
This section describes how to connect the communications cable to the Controller Link Support Board (3G8F7-CLK13-E and 3G8F7-CLK12-EV1) for HPCF Cable Optical Ring Systems.
2-2-1 Communications Cables
Optical Bus or Optical
Ring System (H-PCF
Cable)
The following devices are required for the Optical Bus or Optical Ring (HPCF) Controller Link Network. The cable and connectors are the same as
those used for Optical SYSMAC LINK Networks.
Optical Fiber Cables (Indoor Use Only)
Use the following Optical Fiber Cables (Hard Plastic-clad Fiber: H-PCF).
Name Specifications Model
H-PCF cables Black 10 m S3200-HCCB101
50 m S3200-HCCB501
100 m S3200-HCCB102
500 m S3200-HCCB502
1,000 m S3200-HCCB103
Orange 10 m S3200-HCCO101
50 m S3200-HCCO501
100 m S3200-HCCO102
500 m S3200-HCCO502
1,000 m S3200-HCCO103
Note The Optical Fiber Cable model numbers are as follows:
Name Model Specifications
Connector S3200-COCF2071 Use to connect a cable to a node.
S3200-COCF2571 Use to connect a cable to a node.
Inline Adapter S3200-COIAT2000 Use to connect or extend cables.
(Full-lock connector for crimp-cut cable.)
(Half-lock connector for crimp-cut cable.)
(Use one adapter for each connection.)
35
Page 56

Connecting H-PCF Cable Optical Ring System Cables Section 2-2
Note 1. Either full-lock or half-lock connectors can be used in a Controller Link Net-
work, but we recommend full-lock connectors to prevent accidental disconnections during operation.
2. The maximum distance between nodes is slightly shorter for connectors
with crimp-cut cables compared to connectors assembled with adhesive.
Also, the maximum distance is reduced due to extension loss when Inline
Adapters are used to extend cables.
No Longer Manufactured
Name Model Replacement model
Connector S3200-COCF2011 S3200-COCF2071
S3200-COCF2511 S3200-COCF2571
Optical Fiber Cables with Connectors (Indoor Use Only)
The following Optical Fiber Cables are available with Connectors (lap/polished type) already attached.
Specifications Length Model
Optical Fiber Cable Connectors:
CF-2001H
CF-2001H
Optical Fiber Cable Connectors:
CF-2001H
CF-2501H
Optical Fiber Cable Connectors:
CF-2501H
CF-2501H
2 m S3200-CN201-20-20
5 m S3200-CN501-20-20
10 m S3200-CN102-20-20
15 m S3200-CN152-20-20
20 m S3200-CN202-20-20
Over 20 m S3200-CN-20-20
(Specify length (m) when ordering.)
2 m S3200-CN201-20-25
5 m S3200-CN501-20-25
10 m S3200-CN102-20-25
15 m S3200-CN152-20-25
20 m S3200-CN202-20-25
Over 20 m S3200-CN-20-25
(Specify length (m) when ordering.)
2 m S3200-CN201-25-25
5 m S3200-CN501-25-25
10 m S3200-CN102-25-25
15 m S3200-CN152-25-25
20 m S3200-CN202-25-25
Over 20 m S3200-CN-25-25
(Specify length (m) when ordering.)
36
Note 1. Consult a specialist tradesman if cables with outdoor specifications are re-
quired.
2. The cables listed above are black and have power supply lines and tension
members, although the power supply lines aren’t used in the Controller
Link Network.
3. All of the cables listed above are attached to the connectors with adhesive.
4. Special training is required to assemble Optical Fiber Cables and connectors with adhesive.
Page 57

Connecting H-PCF Cable Optical Ring System Cables Section 2-2
Optical Connector Cover
(Included)
← Higher Lower →
Optical Connector Cover
(Included)
Optical Fiber Cable Accessories
Use the following accessories to assemble and test Optical Fiber Cables.
Name Model Specifications
Optical Fiber Assembly Tool
Optical Power Tester S3200-CAT2700 With S3200-CAT2702 Head Unit and
Master Fiber Set S3200-CAT2001H One meter cable for use with the
An S3200-COCF2071/2571 optical connector can be assembled by adding
the JRFK-57PLUS (Sumitomo Electric Industries) to the S3200-CAK1062.
This manual does not provide details on Optical Fiber Cable preparation. For
details, refer to the instructions provided with the S3200-CAK1062 Assembly
Tool.
No Longer Manufactured
Name Model Specifications
Optical Fiber Assembly Tool
CAK-0057 Crimp-cut tool for the S3200-
COCF2071/2571 Connectors
adapter for the S3200-COCF2071/
2571 Connectors
S3200-CAT2702 Head Unit
S3200-CAK1062 Crimp-cut tool for the S3200-
COCF2011/2511 Connectors
2-2-2 Optical Fiber Cables (H-PCF Cables)
Optical Ring System in
Token Bus Mode
Note 1. Always use the specified Optical Fiber Cables.
All of the nodes in the Optical Controller Link Network are connected in a line
(daisy-chain configuration) with H-PCF Optical Fiber Cables.
Begin connection with the rightmost connector (SL1) of the highest node in
the network and connect to the leftmost connector (SL2) in the next lower
node, as shown in the following diagram.
The nodes can be connected in any order, but connect the nodes in the order
of node addresses (i.e., node 1, node 2... node 62) as much as possible to
reduce the effect on the communications time if a wire breaks.
Always cover the unused connectors on the highest and lowest nodes in the
network with the enclosed Optical Connector Covers.
Refer to 2-1-1 Devices Required for Connection Devices for details on avail-
able Optical Fiber Cables. Refer to 2-2-3 Installing Connectors for details on
connecting the Optical Fiber Cables to the Controller Link Board.
2. The maximum distance between nodes depends on the method used to
attach the connector to the cable.
3. In a system using Optical System Units (model numbers ending CLK11) in
Token Bus Mode (daisy chain connections), the maximum number of
nodes is 32 (i.e., node addresses 1 to 32).
37
Page 58

Connecting H-PCF Cable Optical Ring System Cables Section 2-2
← Higher Lower →
Optical Ring System in
Token Ring Mode
Note 1. Always use the specified Optical Fiber Cables.
Connect all the nodes in a ring using H-PCF Optical Fiber Cables.
Begin connection with the rightmost connector (SL1) of the highest node in
the network and connect to the leftmost connector (SL2) in the next lower
node, as shown in the following diagram.
The nodes can be connected in any order, but connect the nodes in the order
of node addresses (i.e., node 1, node 2... node 62) as much as possible to
reduce the effect on the communications time if a wire breaks.
Refer to 2-1-1 Devices Required for Connection for details on available Optical Fiber Cables. Refer to page 38 Installing Connectors for details on connecting the Optical Fiber Cables to the Controller Link Board.
2. The maximum distance between nodes depends on the method used to
attach the connector to the cable.
2-2-3 Installing Connectors
A special connector is used to connect the Optical Fiber Cable to the Controller Link Support Board.
This manual does not provide details on Optical Fiber Cable preparation.
Connect the nodes in order beginning with the highest node in the network
and continuing on to lower nodes. When connecting a ring, also connect the
end node in the ring to the start node.
• Always turn OFF the computer and backup power supply before connecting Optical Fiber Cables or the backup power supply connector.
• Special tools are required to attach Optical Fiber Cables to the connectors. The cable may disconnect from the connector if the proper tools and
methods are not used during cable assembly.
Connection Procedure
1,2,3... 1. The Optical Fiber Cable’s power supply line is not used, so it can be cut.
38
2. As shown in the following diagram, secure the Optical Fiber Cable, and secure the holding piece to the mounting bracket. Secure the two cables simultaneously for nodes (except the end nodes). Pay attention to the
orientation of the mounting bracket and the connector position when connecting the cable from the highest node in the network to the rightmost
connector (SL1), and the cable from the next lower node to the leftmost
connector (SL2).
Page 59

Connecting H-PCF Cable Optical Ring System Cables Section 2-2
Cable connects to
connector SL1
Cable connects to
connector SL2
(Cable is not shown for
clarity of the diagram.)
Communications will continue (unreliably)
with the remaining connected nodes.
Network divided into two
(Communications disabled)
3. Install the mounting bracket on the Board with the screws provided. Insert
the tip of the mounting bracket with the grooves into the hole on the Board
surface until it locks firmly (a), and then secure the other end of the mounting bracket using the screw (b). Take care not to bend or pull the Optical
Fiber Cable forcefully.
4. Remove the Optical Connector Cover from the Board again. If there are
covers on the end connectors of the Optical Fiber Cable, remove them.
5. Double-check the direction of the cables. The cable from the node higher
in the network connects to the Board’s right connector and the cable to the
node lower in the network connects to the Board’s left connector. Insert the
cable’s connectors fully into the Board’s connectors.
• Insert the connectors completely and check that the connectors are
locked before starting operation.
• If a connector becomes disconnected, the node will be unable to communicate with other nodes in that part of the network. The network will be
divided into two and communications with the remaining nodes will be
unreliable.
39
Page 60

Connecting H-PCF Cable Optical Ring System Cables Section 2-2
Cord
Cable
R
140 mm
Rear side of
the computer
Cord
Cable
• Do not pull on the Optical Fiber Cable.
The maximum tension that can be applied to the cord is 10 kg (about 22
lbs) and the maximum tension that can be applied to the cable is 50 kg
(about 110 lbs).
• Do not bend the cable paste its natural bending radius. The minimum
radius for bends is 10 cm.
• To prevent the Optical Fiber Cable from being pulled too forcefully,
always use the cable mounting bracket and provide space behind the
Board as shown in the following diagram. Do not exceed the maximum
tension for the cord and cable:
Cord: 0 kg (Do not apply any tension.)
Cable: 5 kg (about 11 lbs)
• Do not place objects on top of the Optical Fiber Cable. The maximum
pressure that can be placed on the cord and cable is as follows:
Cord: 30 kg/10 cm
Cable: 50 kg/10 cm
• Inspect the connector before installing it.
• When connecting or disconnecting the Optical Fiber Cable, be sure to
hold the connector firmly. (Do not pull on the cable itself.)
40
Page 61

Optical Ring System (GI Cable) Wiring Section 2-3
2-3 Optical Ring System (GI Cable) Wiring
This section describes how to wire the communications cables to a GI cable
Ring System Controller Link Support Board (3G8F7-CLK53-E and 3G8F7CLK52-EV1).
2-3-1 Communications Cables
The following devices are required for the Optical Ring (GI) Controller Link
Network.
Optical Fiber Cables Use Optical Fiber Cables (Graded Index: GI) with the following optical specifi-
cations.
50/125
Item Minimum Standard Maximum Unit Conditions
Numerical Aperture (N.A.)
Transmission
loss
Connection loss --- --- 1.0 λ = 0.8 μm, one location
Transmission
bandwidth
--- 0.21 --- --- Theoretical value
--- --- 3.0 Lf dB 0.5 km ≤ Lf λ = 0.8 μm
500 --- --- MHz⋅km λ = 0.85 μm (LD)
μm AGF Cable
3.0 Lf + 0.2 0.2 km ≤ Lf < 0.5 km
3.0 Lf + 0.4 Lf < 0.2 km
Note Lf is fiber length in km, Ta is ambient temperature, and λ is the peak wave-
length of the test light source.
62.5/125
Item Minimum Standard Maximum Unit Conditions
Numerical Aperture (N.A.)
Transmission
loss
Connection loss --- --- 1.0 λ = 0.8 μm, one location
Transmission
bandwidth
--- 0.28 --- --- Theoretical value
--- --- 3.5 Lf dB 0.5 km ≤ Lf λ = 0.8 μm
200 --- MHz⋅km λ = 0.85 μm (LD)
μm AGF Cable
3.5 Lf + 0.2 0.2 km ≤ Lf < 0.5 km
3.5 Lf + 0.4 Lf < 0.2 km
T
= 25°C
a
Ta = 25°C
Note Lf is fiber length in km, Ta is ambient temperature, and λ is the peak wave-
length of the test light source.
Connectors ST Connector
41
Page 62

Optical Ring System (GI Cable) Wiring Section 2-3
← Higher Lower →
Receive Send Receive Send
The connector with the triangle facing up is the receive connector, and with the triangle facing down is the send connector. The color of the triangle indicates the upper node
Board and next lower node Board; Be sure to connect
triangles of the same color.
Optical Connector Cover
(Included)
← Higher Lower →
Optical Connector Cover
(Included)
2-3-2 GI Optical Fiber Cable Wiring
Optical Ring System in
Token Bus Mode
All of the nodes in the Optical Controller Link Network are connected in a line
(daisy-chain configuration) with H-PCF Optical Fiber Cable.
Refer to the following diagram when making the connections.
Connect the upper node SL2 receive connector to next lower node SL1 send
connector and connect the upper node SL2 send connector to next lower
node SL1 receive connector.
There is an ID mark on one end of each pair of Optical Fiber Cables. Use this
mark to identify the code.
Incorrect connections may result in a broken wire being incorrectly detected,
and may cause unexpected operation.
The nodes can be connected in any order, but connect the nodes in the order
of node addresses (i.e., node 1, node 2... node 62) as much as possible to
reduce the effect on the communications time if a wire breaks.
Also be sure to cover the unused connectors on the highest and lowest nodes
in the network with the provided Optical Connector Covers.
Refer to 2-1-1 Devices Required for Connection for details on available Optical Fiber Cables. Refer to 2-2-3 Installing Connectors for details on connecting the Optical Fiber Cables to the Controller Link Board.
Note 1. Always use the specified Optical Fiber Cables.
2. The code for the Optical Fiber Cables can be identified from cable marks
and color, but OMRON recommends adding tags to prevent incorrect connection during installation.
3. The maximum distance between the nodes depends on the type of GI cable (core diameter), as follows:
62.5/125 μm: 2 km maximum distance between nodes
50/125 μm: 1 km maximum distance between nodes
42
Page 63

Optical Ring System (GI Cable) Wiring Section 2-3
← Higher
Lower →
Receive
Send
Receive Send
The connector with the triangle facing up is the receive connector, and with the triangle facing down is the send connector. The color of the triangle indicates the upper node
Board and next lower node Board; Be sure to connect
triangles of the same color.
← Higher Lower →
Optical Ring System in
Token Ring Mode
Connect all the nodes in a ring using GI Optical Fiber Cables.
Refer to the following diagram when making the connections.
Connect the upper node SL2 receive connector to next lower node SL1 send
connector and connect the upper node SL2 send connector to next lower
node SL1 receive connector.
There is an ID mark on one end of each pair of Optical Fiber Cables. Use this
mark to identify the code.
Incorrect connections may result in a broken wire being incorrectly detected,
and may cause unexpected operation.
The nodes can be connected in any order, but connect the nodes in the order
of node addresses (i.e., node 1, node 2... node 62) as much as possible to
reduce the effect on the communications time if a wire breaks.
Refer to 2-1-1 Devices Required for Connection for details on available Optical Fiber Cables. Refer to page 38 Installing Connectors for details on connecting the Optical Fiber Cables to the Controller Link Board.
Note 1. Always use the specified Optical Fiber Cables.
2. The code for the Optical Fiber Cables can be identified from cable marks
3. The maximum distance between the nodes depends on the type of GI ca-
2-3-3 Installing Connectors
A special connector is used to connect the Optical Fiber Cable to the Controller Link Support Board.
Connect the nodes in order beginning with the highest node in the network
and continuing on to lower nodes. When connecting a ring, also connect the
end node in the ring to the start node.
and color, but OMRON recommends adding tags to prevent incorrect connection during installation.
ble (core diameter), as described below.
62.5/125 μm: 2 km maximum distance between nodes
50/125 μm: 1 km maximum distance between nodes
• Always turn OFF the computer and backup power supply before connecting Optical Fiber Cables or the backup power supply connector.
43
Page 64

Optical Ring System (GI Cable) Wiring Section 2-3
Cable connects to
connector SL1
Cable connects to
connector SL2
(Cable is not shown for
clarity of the diagram.)
a
b
• Special tools are required to attach Optical Fiber Cables to the connectors. The cable may disconnect from the connector if the proper tools and
methods are not used during cable assembly.
Connection Procedure
1,2,3... 1. Secure the Optical Fiber Cable tension member.
2. As shown in the following diagram, secure the Optical Fiber Cable, and secure the holding piece to the mounting bracket. Secure the two cables simultaneously for nodes except the start and end nodes. Pay attention to
the orientation of the mounting bracket and the connector position when
connecting the cable from the highest node in the network to the rightmost
connector (SL1), and the cable from the next lower node to the leftmost
connector (SL2).
3. Install the mounting bracket on the Board with the screws provided. Insert
the tip of the mounting bracket with the grooves into the hole on the board
surface until it locks firmly (a), and then secure the other end of the mounting bracket using the screw (b). Take care not to bend or pull the Optical
Fiber Cable forcefully.
4. Remove the Optical Connector Covers from the Unit’s connectors shown
in the following diagram if there are covers protecting the connectors. Remove the covers from the tips of the cables’ ST connectors if there are covers protecting the ST connectors.
44
Page 65

Optical Ring System (GI Cable) Wiring Section 2-3
GI Cable Optical Connector Cover
Pull off the cover.
Rotate the cover 90°
counterclockwise.
Slot
Cable optical
connector
Board's optical
connector
Ta b
Press and turn the metal fitting on
the cable connector until it locks.
Align the tab in the cable connector with the slot in the
Board's connector and fully insert the cable connector.
Communications are possible with the
connected nodes, but not reliable.
Network divided
(Transmission not possible)
Note To replace the Optical Connector Cover, just reverse the steps
shown in the diagram above.
5. Turn the cable connector so that the tab in the connector faces left and
aligns with the slot in the Board’s connector. Insert the cable connector fully into the Board’s optical connector. Press and turn the cable’s connector
clockwise to lock the connector in place.
Note To remove the connector, just reverse the steps shown in the dia-
gram above. (Press and turn the cable connector’s metal fitting
counterclockwise to unlock the connector.)
• Insert the connectors completely and always check that the connectors
are locked before starting operation.
• If a connector becomes disconnected while in token-bus mode, the node
will be unable to communicate with other nodes in that part of the network. The network will be divided into two and communications with the
remaining nodes will be unreliable. Be sure not to remove connectors during communications.
When installing Optical Fiber Cables, be sure to stay within the specifications
(e.g., tensile strength, bending, lateral pressure) for the cables used.
When inserting or removing the Optical Fiber Cables, be sure to hold the connector part firmly.
45
Page 66

Backup Power Supply Wiring (Optical Ring Systems Only) Section 2-4
Optical transmission path
Bypass
Power supply
down
Computer
24 VDC
backup power supply
2-4 Backup Power Supply Wiring (Optical Ring Systems Only)
A node bypass function can be used with an Optical Ring Controller Link System (either H-PCF cable or GI cable) by supplying a backup power supply to
the Units and Boards. This will prevent the entire network from going down if a
node malfunctions or the power supply to the PC or computer is turned OFF.
Each node requires a backup power supply for the node bypass function.
Several nodes can be connected to a single power supply or each node can
be connected to an independent power supply. If several nodes are connected to a single power supply, be sure to wire each node separately as
shown in the diagram.
2-4-1 Backup Power Supply Specifications
The input specifications for the backup power supply to the Controller Link
Unit and Support Board are described below. When providing a backup power
supply, make sure that the following specifications are satisfied.
Item Specifications
Power supply voltage 24 VDC
Allowable power supply voltage fluctuation range
Consumption current 24 VDC, 400 mA max. (per node)
Inrush current 2.5 A max. (when 24-VDC rising time is 5 ms)
20.4 to 26.4 VDC (24 VDC, –15 to +10%)
An OMRON S82K-series Power Supply Unit is recommended.
Note 1. If connecting multiple nodes to one power supply, or if the distance be-
tween the power supply and the node is great, carefully consider the maximum current and voltage to satisfy the specifications described above
using the node power supply connectors and terminal positions.
2. Power supply from the backup power supply is given priority. Consider the
following points when designing a system.
a. Turn ON the backup power supply before turning ON the power supply
to the PC and computer.
b. The communications data will be corrupted in the instant when the
backup power supply is turned ON or OFF.
c. To make sure that the node bypass function is operating when the
power supply to the PC or computer is OFF, use a separate backup
power supply that is not connected to the PC or computer.
d. Always use a separate backup power supply. Do not use the same
supply as the I/O power supply, motor power cables, or control power
cables.
46
Page 67

Backup Power Supply Wiring (Optical Ring Systems Only) Section 2-4
24 VDC
Backup
power
supply
+
−
+ −
e. Use a backup power supply with double or reinforced insulation.
3. Use the correct power supply voltage, as given above.
2-4-2 Connecting the Backup Power Supply
Observe the following precautions when connecting the backup power supply.
• Separate the backup power supply wires from other power lines and highvoltage lines to prevent noise.
• Attach the special crimp terminals to the power supply wires. (Use the
same crimp terminals as the wired system communications cables. Refer
to 2-1-2 Communications Cable for details.)
• Do not reverse the power supply polarity.
• Tighten the power supply cable hold-down screws to 0.2 N⋅m.
• Do not pull on the power supply cable.
• Do not bend the power supply cable too sharply.
• Do not place any objects on top of the power supply cable.
• Verify that the connector is installed properly before using the power supply.
• Check the wiring configuration carefully before turning ON the power.
• If the connectors on boards in adjacent slots come into contact with each
other, mount one of the boards in a different slot.
Connect the power supply cable to the cable connector and then secure it to
the Board, as shown in the following diagram. (The following diagram shows a
Board using H-PCF cables, but the diagram for GI cables is the same.) Be
sure that the power supply polarity is not reversed.
The connector for the backup power supply is the same as the communications connector for Wired Controller Link Support Boards. Refer to 2-1-3 Con-
necting Cables to Communications Connectors for details on preparing the
power supply wires and connecting them to the connector, and mounting the
cable connectors.
Note It is difficult to connect or disconnect the backup power supply connector after
the Optical Fiber Cable’s mounting bracket has been installed. Insert the connector before installing the mounting bracket.
47
Page 68

Backup Power Supply Wiring (Optical Ring Systems Only) Section 2-4
48
Page 69

SECTION 3
Creating Applications Using the C Library
This section describes how to create applications (user programs) that control the Controller Link Support Board.
3-1 Basic Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3-1-1 Data Link Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3-1-2 Message Service Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3-2 Using the C Library . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
49
Page 70

Basic Flow Section 3-1
Writing data
link tables
Data link tables not yet written
(no DATALINK.DAT file)
Data link tables
already written
START
Write the data link tables
using the Support Software.
Transfer the data link tables to the
other nodes using the Support
Software. (Data link tables
transferred to the Board will be
recorded in the Board's EEPROM.)
Initialization
Sending/receiving data link data
Ending
Open the application interface using
the ClkOpen function.
Read and write data link data using
the ClkRadDatalink and ClkWriteDatalink functions.
Close the application interface using
the ClkClose function.
The network participation
status and data link operating status can be read
using the ClkGetNetworkStatus function.
3-1 Basic Flow
This section describes the basic procedural flow in creating the applications
(user programs) necessary to use the Controller Link Support Board data link
function and the message service function. Create the applications according
to the flowcharts in this section.
The following explanations assume that the driver and C library have already
been installed. If they have not been, refer to Controller Link Support Board
Installation Guide (W467) before proceeding.
3-1-1 Data Link Procedure
The basic procedure for using data links is outlined in the following flowchart.
50
Note 1. Repeat the process to read/write data link data as often as required by the
application.
2. Data links can be started and stopped from other nodes, by sending FINS
commands from Support Software, by using PC software switches, or by
sending a FINS command from the application using the ClkSendFins
function.
3. Information on errors that occur in using the C library can be read using the
CkGetLastError function.
For details on various methods for making programs, refer to the following
resources.
• Information on using the C library: 3-2 Using the C Library
Page 71

Basic Flow Section 3-1
Writing routing
tables
Routing tables
already written
Routing tables already
written or not necessary
START
Write the routing tables using the
Support Software.
Transfer the routing tables to the
other nodes using the Support
Software. (Routing tables transferred
to the Board will be recorded in the
Board's EEPROM memory.)
Sending and receiving
FINS messages
Send FINS message using the
ClkSendFins function.
Check for responses to FINS message
using the ClkRecvFins function.
No response
Initialization
Ending
Open the application interface using
the ClkOpen function.
Close the application interface using
the ClkClose function.
The network participation status and data
link operating status can be read using
the ClkGetNetworkStatus function.
Response
• Details on C library functions: SECTION 4 C Language Function Refer-
ence
• Support Software: Controller Link Support Software Operation Manual
(W369)
3-1-2 Message Service Procedure
The basic procedure for using the message service is outlined in the following
flowchart.
Note 1. Routing tables are not needed if all communications take place with other
2. Repeat the process to send and receive FINS messages as often as re-
nodes in the local network, but routing tables must be prepared if there are
communications between nodes on different networks.
quired by the application.
51
Page 72

Using the C Library Section 3-2
3. To used Windows-based messages to determine if a FINS message has
been received, use the ClkSetMessageOnArrival and ClkSetThreadMessageOnArrival functions to register the Windows-based messages to be
used for notification. When not using Windows-based messages, check
periodically for FINS messages using ClkRecvFins.
For details on various methods for making programs, refer to the following
resources.
• Information on using the C library: 3-2 Using the C Library
• Details on C library functions: SECTION 4 C Language Function Refer-
ence
• Support Software: Controller Link Support Software Operation Manual
(W369)
3-2 Using the C Library
The Microsoft Visual C++ library functions for the Controller Link Support
Board are provided in the following file.
Fine name Contents
CLK_LIB.LIB Microsoft Visual C++ Ver. 6.0 (Service Pack 3) import library file
The library contains the following functions.
Functions
Function name Name Function Page
ClkOpen Board Open Opens the application interface and gets a
ClkClose Board Close Closes the application interface and
ClkSendFins FINS Message Send Sends a FINS message. 57
ClkRecvFins FINS Message Receive Receives a FINS message. 58
ClkWriteDatalink Data Link Data Write Writes data to a data link area. 59
ClkReadDatalink Data Link Data Read Reads data from a data link area. 59
ClkGetNetworkStatus Network Status Read Reads the network status. 60
ClkGetRingStatus Optical Ring Status Read Reads the optical ring status. 61
ClkSetMessageOnArrival FINS Message Reception
Notification Registration to
Window
ClkSetThreadMessageOnArrival FINS Message Reception
Notification Registration to
Thread
ClkClearMessageOnArrival FINS Message Reception
Notification Clear
ClkGetLastError Detailed Error Information
Acquire
CLK handle.
releases the CLK handle.
Makes settings to notify the specified window with a Windows message when a
FINS message is received.
Makes settings to notify the specified
thread with a Windows message when a
FINS message is received.
Clears windows message notification
when a FINS message is received.
Gets an error code generated when a
CLK library function is used.
56
57
61
62
63
63
52
Page 73

Using the C Library Section 3-2
Setting Up Visual C++ Ver. 6
Use the following procedure to set up Microsoft Visual C++ to use the C
library.
Include Files
1,2,3... 1. Start Visual C++ Ver. 6.0 and select Too l s and then Options.
2. Select the Directory Tab, set the directory being displayed to the one for
the include files, click the first empty row in the list, and then click the ...
Button at the left of the row.
3. Specify the folder in which the C library for the Support Board was installed
and click the OK Button.
The installation directory in the header file default for the C library is \Program Files\OMRON\Controller Link\Lib.
4. Include the following line at the beginning of the program:
#include <CLK_LIB.h>
Setting Up the Library
File.
1,2,3... 1. Start Visual C++ Ver. 6.0 and select Too l s and then Options.
2. Select the Directory Tab, set the directory being displayed to the one for
the library files, click the first empty row in the list, and then click the ... But-
ton at the left of the row.
3. Specify the folder in which the C library for the Support Board was installed
and click the OK Button.
The installation directory in the header file default for the C library is \Program Files\OMRON\Controller Link\Lib.
4. Open the workspace for the program being created and select Project and
then Set.
5. Select the Link Tab and input the library file name “CLK_LIB.LIB” for the
object/library module.
Refer to the user’s manual for Visual C++ or online help for information on
Visual C++ other than that for setting up the install file and library file.
Note There are sample programs provided as Visual C++ V6.0 projects that use
the C library for the Board. They can be found in the Controller Link\Sample
directory using the installation directory specified during the installation procedure.
53
Page 74

Using the C Library Section 3-2
54
Page 75

SECTION 4
C Language Function Reference
This section gives details on the C-language library functions supported by the Controller Link Support Board.
4-1 Library Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4-1-1 ClkOpen()
Board Open . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4-1-2 ClkClose()
Board Close . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4-1-3 ClkSendFins()
FINS Message Send. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4-1-4 ClkRecvFins()
FINS Message Receive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4-1-5 ClkWriteDatalink()
Data Link Data Write. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4-1-6 ClkReadDatalink()
Data Link Data Read . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4-1-7 ClkGetNetworkStatus()
Network Status Read . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4-1-8 ClkGetRingStatus()
Optical Ring Status Read . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4-1-9 ClkSetMessageOnArrival()
FINS Message Reception Notification Registration to Window . . . 61
4-1-10 ClkSetThreadMessageOnArrival()
FINS Message Reception Notification Registration to Thread . . . . 62
4-1-11 ClkClearMessageOnArrival()
FINS Message Reception Notification Clear. . . . . . . . . . . . . . . . . . 63
4-1-12 ClkGetLastError()
Detailed Error Information Acquire. . . . . . . . . . . . . . . . . . . . . . . . . 63
4-2 Structure Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4-2-1 CLKHEADER/*PCLKHEADER Structure . . . . . . . . . . . . . . . . . . 64
4-2-2 EMCLKADDRESS/*PEMCLKADDRESS Structure . . . . . . . . . . 64
4-2-3 NSTBUFFER/*PNSTBUFFER Structure . . . . . . . . . . . . . . . . . . . . 65
4-2-4 RINGBUFFER/*PRINGBUFFER Structure. . . . . . . . . . . . . . . . . . 68
4-3 Detailed Error Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
55
Page 76

Library Functions Section 4-1
Arguments
4-1 Library Functions
This section describes the library functions used for the Control Link Support
Boards for PCI bus. Refer to SECTION 3 Creating Applications Using the C
Library for application methods.
Functions
Function name Name Function Page
ClkOpen Board Open Opens the application interface and gets a
CLK handle.
ClkClose Board Close Closes the application interface and
releases the CLK handle.
ClkSendFins FINS Message Send Sends a FINS message. 57
ClkRecvFins FINS Message Receive Receives a FINS message. 58
ClkWriteDatalink Data Link Data Write Writes data to a data link area. 59
ClkReadDatalink Data Link Data Read Reads data from a data link area. 59
ClkGetNetworkStatus Network Status Read Reads the network status. 60
ClkGetRingStatus Optical Ring Status Read Reads the optical ring status. 61
ClkSetMessageOnArrival FINS Message Reception
Notification Registration to
Window
ClkSetThreadMessageOnArrival FINS Message Reception
Notification Registration to
Thread
ClkClearMessageOnArrival FINS Message Reception
Notification Clear
ClkGetLastError Detailed Error Information
Acquire
Makes settings to notify the specified window with a Windows message when a
FINS message is received.
Makes settings to notify the specified
thread with a Windows message when a
FINS message is received.
Clears windows message notification
when a FINS message is received.
Gets an error code generated when a
CLK library function is used.
56
57
61
62
63
63
4-1-1 ClkOpen() Board Open
Function Opens the application interface and gets a CLK handle.
Call Format PCLKHANDLE ClkOpen(BYTE byAppUnitAdr, INT *piRetErr);
Type Variable name Description
BYTE byAppUnitAdr Unit address allocated to the application
INT* piRetErr Error information for ClkOpen()
Return Value A CLK handle is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information is stored in piRetErr.
Description Set a value between 1 and 15 for AppUnitAdr. Set 0 when it is not necessary
to set a specific application unit address. An unused unit address will be automatically allocated.
The function will end in an error if a Controller Link Support Board is not
mounted.(Detailed error information = ERR_NO_CLKUNIT: No CLK Unit)
The function will end in an error if a handle cannot be obtained because of
insufficient memory. (Detailed error information = ERR_NO_MEMORY: Memory acquisition error)
The function will end in an error if the unit address specified in the argument is
not between 0 and 15. (Detailed error information = ERR_UNIT_ADDRESS:
Unit address range error)
56
Page 77

Library Functions Section 4-1
Arguments
Arguments
Supplemental Information The unit address is different from the board ID on the Support Board.
It is not normally necessary to specify a unit address when sending a command from an application running on the computer and receiving a response.
Always specify the unit address when sending a command to the application
from an application running on a computer or from a PC at a different node.
4-1-2 ClkClose() Board Close
Function Opens the application interface and gets a CLK handle.
Call Format INT ClkClose(PCLKHANDLE hCLK);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
pen()
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
Description If the application is ended without using ClkClose(), the address specified for
ClkOpen() cannot be used again. Always execute ClkClose() for all CLK handles obtained with ClkOpen() before ending the application.
4-1-3 ClkSendFins() FINS Message Send
Function Sends a FINS message.
Call Format INT ClkSendFins(PCLKHANDLE hCLK, PCLKHEADER pHeader, LPVOID
lpMessage, DWORD dwSize);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
pen()
PCLKHEADER pHeader Pointer to the header information struc-
ture for the FINS message
LPVOID lpMessage Pointer to the send buffer for the FINS
DWORD dwSize Size of FINS message send buffer
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
Description Refer to Structure Descriptions for information on the header information
structure.
Store the FINS message from the command code (MRC) on in the FINS message send buffer.
The amount of data that can be sent and received will be limited by the type of
networks through which the message must pass. The largest value that the
send buffer (dwSize) can be set to is 1,998 bytes. The limit when passing
through a SYSMAC LINK Network is 542 bytes.
If SID is –1, autoincrementing will be used for the SID. (There is only one SID
memory area for each process when automatically incrementing functions
internally. There are not separate areas for each network handle or thread.)
The function will end in an error if a FINS message send buffer size of less
than 2 bytes is specified in the argument. (Detailed error information =
ERR_SEND_BUFFER_SIZE: Send message size error)
message
57
Page 78

Library Functions Section 4-1
Arguments
The function will end in an error if SID is not set to between –1 and 255. The
error code will be 39 (SID setting error).
4-1-4 ClkRecvFins() FINS Message Receive
Function Receives a FINS message.
Call Format INT ClkRecvFins(PCLKHANDLE hCLK, PCLKHEADER pHeader, LPVOID
lpMessage, DWORD dwSize, DWORD dwTimeLimit);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
pen()
PCLKHEADER pHeader Pointer to the header information struc-
ture for the FINS message
LPVOID lpMessage Pointer to the receive buffer for the
DWORD dwSize Size of FINS message receive buffer
DWORD dwTimeLimit Reception wait time (unit: ms)
Return Value The size of the FINS message that was receive is returned as the number of
bytes if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error infor-
mation can be obtained using ClkGetLastError().
FINS message
Description The number of receive bytes in the return value is for all bytes starting from
the command code (MCR) in the FINS message.
Refer to Structure Descriptions for information on the header information
structure.
The FINS message from the command code (MRC) on will be stored in the
FINS message receive buffer.
The function will end in an error if a FINS message receive buffer size of less
than 2 bytes is specified in the argument. (Detailed error information =
ERR_RECV_BUFFER_SIZE: Receive message size error)
The function will end in an error if a message reception area cannot be
obtained because of insufficient memory. (Detailed error information =
ERR_NO_MEMORY: Memory acquisition error)
The function will end in an error if the reception wait time is set to 0 and a
FINS message has not yet been received. (Detailed error information = 38:
Receive timeout)
The function will end in an error if the reception wait time elapses without
receiving a FINS message. (Detailed error information = 38: Receive timeout)
The function will end in an error if the received FINS message is larger than
the reception buffer size. The portion of the FINS message that fits will be
stored in the reception buffer. (Detailed error information =
ERR_MSG_SIZE_OVER: Receive buffer size error)
58
Page 79

Library Functions Section 4-1
Arguments
Arguments
4-1-5 ClkWriteDatalink() Data Link Data Write
Function Writes data to a data link area.
Call Format INT ClkWriteDatalink(PCLKHANDLE hCLK, PEMCLKADDRESS pEmAd-
dress, LPWORD lpWriteData, DWORD dwSize);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
PEMCLKADDRESS pEmAddress Pointer to the starting address struc-
LPWORD lpWriteData Pointer to the buffer to store the write
DWORD dwSize Write data size (unit: words)
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
Description Refer to Structure Descriptions for information on the starting address struc-
ture for writing data.
The function will end in an error if a data size of 0 is specified for write data
size specified as the argument. (Detailed error information =
ERR_WRITE_BUFFER_SIZE: Write data size error)
The function will end in an error if access is requested to 3 or more different
memory areas for one CLK handle. (Detailed error information =
ERR_MEMORY_AREA: Multiple memory area specification error)
The function will end in an error if a memory name specified in the argument
does not exist. (Detailed error information = ERR_NO_MEM_TYPE: No such
memory)
pen()
ture for writing data
data
4-1-6 ClkReadDatalink() Data Link Data Read
Function Reads data from a data link area.
Call Format INT ClkReadDatalink(PCLKHANDLE hCLK, PEMCLKADDRESS pEmAd-
dress, LPWORD lpReadData, DWORD dwSize);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
pen()
PEMCLKADDRESS pEmAddress Pointer to the starting address struc-
LPWORD lpWriteData Pointer to the buffer to store the read
DWORD dwSize Read data size (unit: words)
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
Description Refer to Structure Descriptions for information on the starting address struc-
ture for reading data.
The function will end in an error if 0 is specified for the read data size specified as the argument. (Detailed error information =
ERR_READ_BUFFER_SIZE: Read data size error)
ture for reading data
data
59
Page 80

Library Functions Section 4-1
Arguments
The function will end in an error if access is requested to 3 or more different
memory areas for one CLK handle. (Detailed error information =
ERR_MEMORY_AREA: Multiple memory area specification error)
The function will end in an error if a memory name specified in the argument
does not exist. (Detailed error information = ERR_NO_MEM_TYPE: No such
memory)
4-1-7 ClkGetNetworkStatus() Network Status Read
Function Reads the network status.
Call Format INT ClkGetNetworkStatus(PCLKHANDLE hCLK, BYTE byNet, PNST-
BUFFER pBuffer);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
pen()
BYTE byNet Network address of the Broad to read
network status
PNSTBUFFER pBuffer Pointer to the buffer structure to store
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
the read data
Description Refer to Structure Descriptions for information on the read data structure.
The read data size is fixed. Provide a memory area the size of the PNSTBUFFER structure as a read data storage buffer.
If the function is executed for a Board that is not part of a network, 0 will be set
for the following members of the read data structure.
Network participation status
Communications cycle time
Polling node address
Data link operation status and data link mode
Data link status
The function will end in an error if an error response code is returned for the
FINS message. (Detailed error information = ERR_RESPONSE: Error
response code error)
The function will end in an error if a Controller Link Support Board is not
mounted for the network specified by the Board network address specified as
an argument. (Detailed error information = ERR_NO_CLKUNIT: No CLK Unit)
The function will end in an error if a message reception area cannot be
obtained because of insufficient memory. (Detailed error information =
ERR_NO_MEMORY: Memory acquisition error).
The function will end in an error if a network address of 0 is specified when
there is more than one network. (Detailed error information =
ERR_NETWORK_ADDRESS).
60
Page 81

Library Functions Section 4-1
Arguments
Arguments
4-1-8 ClkGetRingStatus() Optical Ring Status Read
Function Reads the optical ring status.
Call Format INT ClkGetRingStatus(PCLKHANDLE hCLK, BYTE byNet, PRINGBUFFER
pBuffer);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
BYTE byNet Network address of the Broad to read
PRINGBUFFER pBuffer Pointer to the buffer structure to store
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
Description Refer to Structure Descriptions for information on the read data structure.
The read data size is fixed. Provide a memory area the size of the PNSTBUFFER structure as a read data storage buffer.
The function will end in an error if an error response code is returned for the
FINS message. (Detailed error information = ERR_RESPONSE: Error
response code error)
The function will end in an error if a Controller Link Support Board is not
mounted for the network specified by the Board network address specified as
an argument. (Detailed error information = ERR_NO_CLKUNIT: No CLK Unit)
The function will end in an error if it is executed for a Wired Board or an Optical Board in token bus mode. (Detailed error information =
ERR_NOT_RING_MODE: Wrong operating mode)
The function will end in an error if a message reception area cannot be
obtained because of insufficient memory. (Detailed error information =
ERR_NO_MEMORY: Memory acquisition error)
The function will end in an error if a network address of 0 is specified when
there is more than one network. (Detailed error information =
ERR_NETWORK_ADDRESS).
pen()
the optical ring status for
the read data
4-1-9 ClkSetMessageOnArrival()
FINS Message Reception Notification Registration to Window
Function Makes settings to notify the specified window with a Windows message when
a FINS message is received.
Call Format INT ClkSetMessageOnArrival(PCLKHANDLE hCLK, HWND hWnd, UINT
uMsg);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
pen()
HWND hWnd Window handle to receive event notifi-
cation
UINT uMsg Message to use for notification
(WM_USER to 0x7FFF)
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
61
Page 82

Library Functions Section 4-1
Arguments
Description Both ClkSetMessageOnArrival and ClkSetThreadMessageOnArrival cannot
be registered at the same time.
The function will end in an error if a null pointer is specified for the window
handle specified as the argument. (Detailed error information =
ERR_WINDOWHANDLE_PARA: Window handle error)
The function will end in an error if an illegal value is specified for the window
handle specified as the argument. (Detailed error information = 67: Illegal window handle)
The function will end in an error if the message specified in the argument is
over 0x7FFF. (Detailed error information = ERR_MESSAGE_PARA: Message type error)
The function will end in an error if a message has already been registered for
FINS message reception. (Detailed error information = 69: Duplicated message registration error)
4-1-10 ClkSetThreadMessageOnArrival()
FINS Message Reception Notification Registration to Thread
Function Makes settings to notify the specified thread with a Windows message when a
FINS message is received.
Call Format INT ClkSetThreadMessageOnArrival(PCLKHANDLE hCLK, DWORD
dwThreadId, UINT uMsg);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
DWORD dwThreadId Thread ID to receive event notification
UINT uMsg Message to use for notification
pen()
(WM_USER to 0x7FFF)
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
Description Both ClkSetMessageOnArrival and ClkSetThreadMessageOnArrival cannot
be registered at the same time.
The function will end in an error if a null pointer is specified for the window
handle specified as the argument. (Detailed error information =
ERR_WINDOWHANDLE_PARA: Window handle error)
The function will end in an error if an illegal value is specified for the window
handle specified as the argument. (Detailed error information = 67: Illegal window handle)
The function will end in an error if the message specified in the argument is
over 0x7FFF. (Detailed error information = ERR_MESSAGE_PARA: Message type error)
The function will end in an error if a message has already been registered for
FINS message reception. (Detailed error information = 69: Duplicated message registration error)
62
Page 83

Library Functions Section 4-1
Arguments
Arguments
4-1-11 ClkClearMessageOnArrival()
FINS Message Reception Notification Clear
Function Clears windows message notification when a FINS message is received.
Call Format INT ClkClearMessageOnArrival(PCLKHANDLE hCLK);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
Return Value CLK_SUCCESS is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error. Detailed error information can be obtained using ClkGetLastError().
pen()
4-1-12 ClkGetLastError() Detailed Error Information Acquire
Function Gets detailed error information generated when a Controller Link library func-
tion is used.
Call Format INT ClkGetLastError(PCLKHANDLE hCLK);
Type Variable name Description
PCLKHANDLE hCLK The CLK handle obtained with ClkO-
pen()
Return Value Detailed error information is returned if the function ends normally.
CLK_ERROR is returned if the function ends in an error.
Description Refer to 4-3 Detailed Error Information for details on the return value.
63
Page 84

Structure Descriptions Section 4-2
4-2 Structure Descriptions
4-2-1 CLKHEADER/*PCLKHEADER Structure
This structure stores heading information for a FINS message. It is used by
ClkSendFins() and ClkRecvFins().
Type Variable name Contents
BYTE ByIcfBits FINS header ICF
Set the following for the FINS message: Command/response and response
needed/not needed.
0x80 (128) Command requiring response
0x81 (129) Command not requiring response
0xC0 (192) or 0xC1 (193): Response
BYTE byNetAddr Source/destination network address
For ClkSendFins(), set the destination network address.
For ClkRecvFins(), the network address of the source of the FINS message
is stored.
BYTE byNodeAddr Source/destination node address
For ClkSendFins(), set the destination node address.
For ClkRecvFins(), the node address of the source of the FINS message is
stored.
BYTE byUnitAddr Source/destination unit address
For ClkSendFins(), set the destination unit address.
For ClkRecvFins(), the unit address of the source of the FINS message is
stored.
INT nSid Service ID
Any value can be set to identify the FINS message.
For ClkRecvFins(), the SID of the received FINS message is stored.
4-2-2 EMCLKADDRESS/*PEMCLKADDRESS Structure
This structure stores heading information for a FINS message. It is used by
ClkWriteDatalink() and ClkReadDatalink().
Type Variable name Contents
LPCTSTR lpszMemName Area type
Specify the text string for the event memory area type set for the data link
area.
DWORD dwWordOffset Number of offset words
Set the number of words to offset from the beginning of the event memory
area specified with IpszType.
The areas and ranges that can be accessed can be changed using FinsGateway event memory settings. The default areas and ranges are listed in the following table.
Area Designation Range
CIO Area CIO 0 to 32767
DM Area DM 0 to 32767
64
Page 85

Structure Descriptions Section 4-2
Wired/optical discrimination, transmission path form, etc.
Bit
−: Not specified.
Maximum number of nodes supported
00: 32 nodes
01: 64 nodes
Transmission path
0: Token bus
1: Token ring
Connection type
0: Wired
1: Optical ring
Note When optical and optical ring connections are combined, the maxi-
mum number of nodes supported will be given as 62 nodes for an optical ring connection even if the maximum number of nodes is 32.
Number of send words
0: 1,000 max.
1: 4,000 max.
76543210
4-2-3 NSTBUFFER/*PNSTBUFFER Structure
This structure stores network status that has been read. It is used by ClkGetNetworkStatus().
Type Variable name Contents
BYTE byConnectionMethod
BYTE byMyNodeAddr Local unit address
Stores the local unit address set for the Controller Link Board.
BYTE byMyUnitAddr Local unit address
Stores the local unit address set for the Controller Link Board.
BYTE byMyNetAddr Local network address
Stores the local network address set for the Controller Link Board.
BYTE abyNodeList[32]
Network participation status
Stores a list of the nodes participating in the network.
Bit
Node 1 Reserved
[0]
Node 3 Node 2
[1]
Node 5 Node 4
[2]
Node 61 Node 60
[30]
[31]
Reserved Node 62
Node Participation Information
0: Not participating in network
1: Participating in network
0: Normal disconnection
1: Error disconnection
(when not participating)
0: Normal
1: No response to polling.
Note For Wired Systems with a maximum of 32 nodes, the above
information is valid through node 32 (lower 4 bytes of
abyNodeList[16]).
WORD wComunicationCycleTime Communications cycle time
Stores the current value of the communications cycle time. (unit: 0.1 ms)
BYTE byPollingNodeAddr Polling node address
Stores the node address of the current polling node.
BYTE byStatus1 Reserved area
Stores undetermined data.
65
Page 86

Structure Descriptions Section 4-2
Baud rate, power supply status, terminating resistance setting status
For Wired Systems, stores the set baud rate and the setting of the
terminating resistance switch.
For Optical Ring System, stores the power supply status.
Bit
Baud rate
0x1: 2 Mbits/s
0x2: 1 Mbits/s
0x3: 500 kbits/s
Wired System
0: Terminating resistance switch OFF
1: Terminating resistance switch ON
Optical System
0: No backup power supply
1: Backup power supply
Type Variable name Contents
BYTE byStatus2
BYTE byStatus3
Error information 1
Stores information such as whether or not there is an error log recorded,
node address setting errors, etc.
1: Error history
1: Fatal data link error
1: Communications controller send
section error
BYTE byStatus4 Reserved area
Stores undetermined data.
BYTE byStatus5
Error information 2
Stores information such as EEPROM write errors, setting table errors, etc.
1: EEPROM write error
BYTE byStatus6 Reserved area
Stores undetermined data.
Bit
1: Node address setting error
1: Node address duplicated
1: Network parameter mismatch
1: Communications controller
hardware error
1: Network parameter error
1: Data link table error
1: Routing table error
66
Page 87

Structure Descriptions Section 4-2
Data link status
Stores the data link status.
Bit
[0]
[1]
[2]
[60]
[61]
Node 1
Node 2
Node 3
Node 61
Node 62
Node Data Link Status
−: Not specified
PC Operating Status
0: Stopped
1: Running (PC program being executed.)
CPU Unit Error Status
0: No error
1: Error
Data Link Communications Error Status
0: Normal
1: Error (Data link data not received normally.)
Data Link Participation Status
0: Not participating or data links stopped
1: Participating
Offset Error Status (Offset larger than number of send words)
0: Normal
1: Error
Insufficient Reception Area
0: Normal
1: Insufficient
Excess Reception Area
0: Normal
1: Excess
(Data larger than data link reception area.
Overflow data discarded.)
(Data smaller than data link reception area.
Overflow area data not specified.)
Note For Wired Systems with a maximum of 32 nodes, the above
information is valid through node 32 (abyDataLinkStatus[32]).
Type Variable name Contents
BYTE byStatusFlag
Data link operation status and data link mode
Stores the data link operation status, data link mode, etc.
BYTE abyDataLinkStatus[62]
Bit
Data Link Operating Status
0: Stopped
1: Running
−: Not specified
Current Data Link Mode
0: User-set links
1: Automatic
67
Page 88

Structure Descriptions Section 4-2
4-2-4 RINGBUFFER/*PRINGBUFFER Structure
This structure stores optical ring status that has been read. It is used by
ClkGetRingStatus().
Type Variable name Contents
WORD wDisConnectionFlag Disconnected Line Flags (See graphic following this table.)
WORD wDisConnectionNodeInfo1 Disconnected node information 1 (See graphic following this
WORD wDisConnectionNodeInfo2 Disconnected node information 2 (See graphic following this
BYTE abyDisConnectionInfoRecordTime[6] Starting time for disconnected information storage (See
DWORD dwNetworkSeparationCount Number of network separations
DWORD dwNewsorkDisConnectionCount Number of network disconnections
DWORD dwLocalNodeDisConnectionCount Number of local node disconnections
DWORD dwNetworkDisConnectionMaxCycleCount Maximum number of cycles with continuous disconnection
DWORD dwFrameDropOutsCountSL1 Number of frame dropouts for SL1
DWORD dwFrameDropOutsCountSL2 Number of frame dropouts for SL2
DWORD dwFrameBrakesCountSL1 Number of broken frames for SL1
DWORD dwFrameBrakesCountSL2 Number of broken frames for SL2
DWORD dwCrcErrorCountSL1 Number of CRC errors for SL1
DWORD dwCrcErrorCountSL2 Number of CRC errors for SL2
table.)
table.)
graphic following this table.)
Disconnected Line Flags
For more information on the Disconnected Line Flags and Disconnected
Node Information, refer to the Optical Ring Controller Link Units Operation
Manual (Cat. No. W370).
High Bits
Network Disconnected Flag
0: Normal
1: Disconnected
Low Bits
Local Node Disconnection Direction Flag
0: SL1 (upstream)
1: SL2 (downstream)
Local Node Disconnected Flag
0: Normal
1: Disconnected
(Valid when Local Node Disconnected Flag is ON.)
68
Page 89

Detailed Error Information Section 4-3
Disconnected Node Information
High Bits
Disconnection Direction Flag
0: SL1 (upstream)/Normal
1: SL2 (downstream)
Low Bits
Disconnected Node Address (2-digit hexadecimal)
Disconnected node information can be read out for up to two disconnections:
Disconnected Node Information 1 and Disconnected Node Information 2.
Starting Time for Disconnected Information Storage
Bit
[0]
Minutes
[1]
Seconds
[2]
Date of month
[3]
Hour (24-hr time)
[4]
Year (rightmost 2 digits)
Month
[5]
The time when recording disconnection information was started is stored as
shown above. All data is BCD.
4-3 Detailed Error Information
The information read by ClkGetLastError is listed in the following table. Macro
names for error codes are defined in CLK_LIB.H.
Error
code
1 ERR_UNIT_ADDRESS Unit address range error
2 ERR_NO_CLKUNIT Controller Link Unit is missing.
3 ERR_NO_MEMORY Memory could not be obtained.
4 ERR_MSG_SIZE_OVER Reception message was too large.
5 ERR_NO_MEM_TYPE Memory type does not exist.
6 ERR_RESPONSE Response code error
7 ERR_SEND_BUFFER_SIZE Send message size error
8 ERR_RECV_BUFFER_SIZE Reception message size error
9 ERR_WRITE_BUFFER_SIZE Write data size error
10 ERR_READ_BUFFER_SIZE Read data size error
11 ERR_WINDOWHANDLE_PARA Window handle error
12 ERR_MESSAGE_PARA Message type error
13 ERR_MEMORY_AREA Memory type designation error
14 ERR_INTERNAL_FAILURE Unexpected error
15 ERR_NOT_RING_MODE Not in Optical Token Ring Mode.
16 ERR_NETWORK_ADDRESS Network address designation error
30 --- Service not defined.
31 --- Incorrect network handle
32 --- Memory insufficient; cannot execute.
33 --- Unit of the same unit address already
Macro name Meaning
exists.
69
Page 90

Detailed Error Information Section 4-3
Error
code
34 --- Network busy; cannot execute.
35 --- Reception buffer overflow
36 --- Data size error
37 --- FINS header error
38 --- Reception timeout (no receive data)
39 --- Invalid SID setting
40 --- Version is not supported; impossible to
41 --- Wrong setting in routing tables; cannot
42 --- Routing table error
43 --- Allowed number of gateways exceeded
44 --- Version already in locked state and can't
45 --- Attempted to make header to response.
46 --- Attempted to make response to com-
47 --- Could not make event object to be used
48 --- Could not make list object to be used to
49 --- Failed in standby process of exclusive
50 --- Failed in mapping of shared memory.
51 --- Name of object is too long.
52 --- Attempted to release unused unit
53 --- Unexpected error occurred.
54 --- Failed to initialization of shared memory.
55 --- Failed in attachment to shared memory.
56 --- Number of units (units) simultaneously
57 --- Send destination unit does not existence.
58 --- Could not notify data transmission.
59 --- Exit from receive standby due to abnor-
60 --- Failed in receive standby.
61 --- All reserved area of network handle is
62 --- Incoming data is not received yet.
63 --- Invalid Windows message type
64 --- Failed in message notice.
65 --- Invalid prototype
66 --- Buffer is too short.
67 --- Invalid Windows handle
68 --- Failed in beginning thread for sending
69 --- Message registration duplication error
Macro name Meaning
execute.
reach final network
change.
mand that requires no response.
for send data notice.
receive data.
control of shared memory.
address.
usable exceeded.
mal end of other process.
fully used.
message.
70
Page 91

This section describes how to use data links in a Controller Link Network.
5-1 What Are Data Links? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5-1-1 Data Link Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5-1-2 Differences Between Manual and Automatic Setting . . . . . . . . . . . 77
5-2 Setting Data Links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5-2-1 Selecting Manual or Automatic Setting. . . . . . . . . . . . . . . . . . . . . . 77
5-2-2 Manual Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5-2-3 Data Link Table Specifications for Controller Link Support Boards 80
5-2-4 Automatic Setting: “Select All”. . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5-2-5 Example of Automatic Setting with Equality Layout . . . . . . . . . . . 81
5-3 Starting and Stopping Data Links. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5-3-1 Using a Programming Device or a Ladder Program . . . . . . . . . . . . 83
5-3-2 Using the Controller Link Support Software . . . . . . . . . . . . . . . . . . 84
5-3-3 Using FINS Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5-4 Checking Data Link Status. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5-4-1 LED Indicators. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5-4-2 Data Link Status Area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5-4-3 Checking by Manipulating Bit/Word Status . . . . . . . . . . . . . . . . . . 87
5-5 Changing the Data Link Tables with Active Data Links . . . . . . . . . . . . . . . . 87
5-5-1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5-5-2 Example of Changing Data Link Table with Active Data Links . . . 88
5-5-3 Operations when Changing Data Link Tables . . . . . . . . . . . . . . . . . 88
5-5-4 Timing Required to Change Data Link Tables with
Active Data Links (Theoretical) . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
SECTION 5
Data Links
71
Page 92

What Are Data Links? Section 5-1
# 1
# 1
# 1
# 2
# 2
# 2
# 2
# 1
# 2
# 2
# 1
# 1
# 1
# 1
# 2
# 2
# 1
# 2
# 1 # 2
# 1 # 1
Area 1
Area 2
Area 1
Area 2
Send only
Example 1: The order of send and receive
nodes is free.
Example 2: Some nodes can send data
without receiving data.
# 1
# 2
# 2
# 1
# 1
# 2
# 1 # 2
# 1 # 1
# 1 # 2
# 2# 2
# 2# 2
# 1 # 2
Area 1
Area 2
Area 1
Area 2
Receive only
Receive only
Several words
from the beginning of area
Example 3: Some nodes can receive
data without sending data.
Example 4: A node can receive only a
specified number of words from
the beginning of an area.
5-1 What Are Data Links?
Data links automatically exchange data in the preset areas between nodes
(PCs and/or computers) on one network. Data links can be created for
C200HX/HG/HE PCs, CV-series PCs, CS-series PCs, CJ-series PCs, and
IBM PC/AT or compatible computers.
Two data link areas, area 1 and area 2, can be set for each node.
Data links can be set in either of the following ways.
• Data link areas can be manually set by inputting data link tables through
the CLK Data Link Setting Utility in the FinsGateway or the Controller Link
Support Software. Data link tables are created to define the data links.
These tables enable user-specified allocation of data link areas.
• Data links can be set automatically from a Programming Device. With
automatically set data links, all link areas are the same size.
Both automatic setting and manual setting cannot be used together in the
same network. The following rules apply to these two methods of setting data
links.
• Data links are enabled concurrently for area 1 and area 2.
• Separate settings (first link words and send area size) are made in area 1
and area 2. The sequences of send and receive words are the same in
area 1 and area 2.
• Not all nodes must participate in the data links.
Manually Setting Data Links
72
Manually set data links are used to create flexible data links that meet the
needs of the individual system.
• Data links are set in the Controller Link Unit or Board of each node using
the CLK Data Link Setting Utility in the FinsGateway or Controller Link
Support Software or CX-Programmer.
• At PCs, area 1 and area 2 can be selected from memory areas, including
the DM Area and EM Area.
• The sequence of receive nodes can be changed.
• A send area and its size can be allocated freely for each node.
Page 93

What Are Data Links? Section 5-1
# 1
# 1
# 2
# 1 # 2
# 1
# 1
# 2
# 1
Area 1
Area 2
Specified position in relation to the leading word
Specified number of words
Specified position in relation to the leading word
Specified number of words
Area 2
(Data memory)
Node #1 Node #2
Node
#3
# 3
# 2
# 1
# 3
# 2
# 1
# 3
# 2
# 1
Area 1
(Bit areas)
# 3
# 2
# 1
# 3
# 2
# 1
# 3
# 2
# 1
Example
• Nodes can be set that only send or only receive data.
• Only part of send data can be received and an offset can be used to specify the beginning of the desired part.
Manual Setting Options The following options can be set when manually setting data links.
Offsets
Data of only the specified number of words can be received starting from the
specified word position. The starting word is set as an offset from the beginning of the send data. The following is an example.
Easy Setting: “Set All”
The send data areas of all nodes can be set to the same size (same as for
automatic setting described next).
Note Easy Setting appears as “Set All” on the Controller Link Support Board
screen.
Automatically Setting Data Links with Equality Layout
Automatic setting can be used to create simple data links.
• Using a Programming Device (such as a Programming Console), set the
automatic data link mode in the DM parameter area of the startup node.
• Area 1 can be selected from bit areas (i.e., IR, CIO, and LR areas) and
area 2 can be selected from Data Memory.
• A computer cannot be used as the startup node if data links are being
automatically set. When automatically setting data links, computers can
only participate in the data links.
73
Page 94

What Are Data Links? Section 5-1
1
4
2
3
1
2
1
3
1
4
1
4
2
3
1
2
1
3
1
4
Node 1 Node 2 Node 3 Node 4
Area 1
Area 2
• The maximum number of send/receive words is 8,000 when data links are
automatically set, even for computers. This is because computers relay
on the Controller Link Unit settings in the startup node.
• In areas 1 and 2 send areas for each node are of the same size.
• Send nodes are in the same ascending order as node numbers.
• It is not possible to receive only a part of send data.
• All nodes can be specified to either participate or not participate in the
data link.
• The data link areas are exactly the same and common to all nodes participating in the data links.
Note The Controller Link Support Software contains a function called
“Easy Setting” that can be used within the manual data link mode
to register the same data links as automatic setting. This Easy Setting can be used first, and then the send size of each node and other settings can be changed as required.
Automatic Setting Data Links with 1:N Allocations
This method is used to simplify setting of 1:N allocation data links between
master and slave nodes.
74
• There are three types of 1:N allocations.
• Programming Devices (including Programming Consoles) are used to set
the automatic data link mode in the DM Parameter Area of the PC used
as the startup node.
• Node 1 is the master node.
• Areas 1 and 2 can be selected from bit-access areas or the DM Area.
• The send area sizes of the master and slave nodes are the same for each
area.
• Send nodes are in the same ascending order as node numbers.
• All nodes can be specified to either participate or not participate in the
data link.
• The data link areas (data link start words) are common to all nodes participating in the data links.
Page 95

What Are Data Links? Section 5-1
# 1
# 2
# 3
# 3
# 1 # 3
# 2
# 2
# 1
Offset from the beginning
Number of words to be received
Restricted reception
from node 1 by
specifying an offset
Restricted reception
from node 2 by
specifying an offset
# 1
# 2
# 3
Note 1. Automatic data link creation with 1:N allocations can only be used with the
following Controller Link Units and Support Boards:
Wired Networks CS1W-CLK23, CJ1W-CLK23, 3G8F7-CLK23-E,
CS1W-CLK21-V1, CJ1W-CLK21-V1, and 3G8F7CLK21-EV1
Optical Ring Networks
using H-PCF Cable
Optical Ring Networks
using GI Cable
CS1W-CLK13, 3G8F7-CLK13-E,
CS1W-CLK12-V1 (See note 2.), and 3G8F7-CLK12-EV1
CS1W-CLK53, 3G8F7-CLK53-E,
CS1W-CLK52-V1 (See note 2.), and 3G8F7-CLK52-EV1
2. Lot numbers 030601 or later.
3. Controller Link Units and Support Boards other than those listed above
cannot participate in 1:N allocation data links. They can, however, join the
network if a parameter in the DM Parameter Area is set so that they do not
participate in the data links.
4. The Controller Link Support Board can be used in automatic data link creation with 1:N allocations, but it cannot be the startup node. Use a Controller Link Unit on the same network as the startup node.
5. For automatic data link creation with 1:N allocations, use the CX-Net in
CX-Programmer version 3.2 or later.
Using Offsets For automatically set data links, all of the send words transmitted by a node
are received by other nodes with no change in size. For manually set data
links, the size of a receive area can be restricted by specifying a number of
words from the beginning word of the words sent by another node.
Automatically set
data links
Manually set
data links
# 1 # 2 # 3
# 1
# 2
# 3
# 1 # 2 # 3
# 1
# 2
# 3
A node can specify the number of
words to receive from the beginning
send word.
# 1 # 1
# 2
# 3
# 1
# 2
# 3
# 2
# 3
# 1
# 2
# 3
However, the above system does not guarantee that only the desired words
will be received and there is a good chance that unnecessary data will also be
received.
Offsetting enables specification of a more specific range of receive data by
indicating both the number of words and the starting word position from the
beginning of the area. The offset refers to the starting word position counted
from the beginning of the area.
75
Page 96

What Are Data Links? Section 5-1
Application Example of Using Offsets
In the following example, the send data from node 1 is split into three parts
and each part is received by a different node, i.e., each of the other nodes
receives only part of the send data from node 1. This enables effective use of
data link memory areas without wasting space. In this way, a type of message
service (i.e., specific data to a specific node) can be achieved through data
links.
# 1 # 2 # 3 # 4
Send data of node 1
5-1-1 Data Link Specifications
Item Description
No. of data link nodes Optical Ring System: 62 nodes max. (2 nodes min.)
Wired System: 32 nodes max. (2 nodes min.)
Number of
data link
words
Allocation of data link areas Manual setting Area 1, 2: Bit-access area (IR, CIO, and LR Areas)
Send areas per
node
Data link areas
(send and
receive) that
can be created
per node
CS or CJ Series CS1W-CLK23 or CJ1W-CLK23:
CS1W-CLK21-EV1 or CJ1W-CLK21-EV1:
C200HX/HG/HE, CVM1/CV,
CQM1H
Computers 3G8F7-CLK23-E: 4,000 words max.
CS or CJ Series CS1W-CLK23-E or CJ1W-CLK23-E:
C200HX/HG/HE, CVM1/CV,
CQM1H
Computers 32,000 or 62,000 words max. (See note 2.)
Automatic setting equality
layout
Automatic setting
1:N allocations
Area 1: IR, CIO, or LR Area
Area 2: DM Area (DM and EM Areas)
Area 1, 2: Bit-access area (IR, CIO, and LR Areas)
1,000 words max.
3G8F7-CLK21-EV1, 3G8F5-CLK21-E:
CS1W-CLK21-EV1 or CJ1W-CLK21-EV1:
8,000 words max.
DM Area (DM and EM Areas)
DM Area (DM and EM Areas)
4,000 words max.
1,000 words max.
1,000 words max.
20,000 words max.
20,000 words max. (unit version 1.2 or later)
12,000 words max. (Pre-Ver. 1.2)
76
Note 1. Up to 62 nodes can be set by using Repeater Units when the network is
configured with only the 3G8F7-CLK21-EV1, CS1W-CLK23, CJ1WCLK23, or 3G8F7-CLK23-E.
2. When optical and optical ring connections are combined, the maximum
number of nodes is 32 and the maximum number of data link words for a
computer for manual settings is 32,000 words.
Page 97

Setting Data Links Section 5-2
5-1-2 Differences Between Manual and Automatic Setting
Item Manual setting Automatic setting (See note 1.)
Determination of nodes
participating in a data
link
Data link settings Set in data link tables that are set in the
Data link areas 1 and 2 In each node, area 1 and area 2 are
Refresh starting word Can be set freely in each node. Can be set freely.
Data link status area Selected from bit areas (IR, CIO, and LR
Refresh sequence Can be set in each node freely. Node addresses are in ascending order.
Data reception It is possible to set in each node whether
Data transmission The send sizes can be set freely in each
Determined by setting data link tables. Determined by the data link parameters
set in the data link startup node (the node
used to start the data links).
Determined by the data link parameters
nodes to participate in data links.
selected from bit areas (IR, CIO, and LR
Areas) and Data Memory (DM and EM
Areas).
However, areas 1 and 2 cannot be set in
the same memory area.
Areas) and Data Memory (DM and EM
Areas) in each node.
the entire data or a part of the data sent
from another node is received. It is also
possible to not receive the data sent from
a specific node. (See note 2.)
node. It is also possible for certain node
not to send data. (See note 2.)
set in the data link startup node (the node
used to start the data links).
Area 1 is selected from bit areas (IR, CIO,
and LR Areas) and area 2 is selected from
Data Memory (DM and EM Areas).
Selected from bit areas (IR or CIO Areas).
The entire data sent from each node that
is participating in the data link is received.
In area 1 and area 2, data send sizes are
the same in each node.
Note 1. Automatically set data links cannot be started from the Controller Link Sup-
port Board.
The Controller Link Support Board can participate in automatically set data
links.
2. If data links are manually set, send/receive area can be selected in each
node, allowing send/receive groups to be created within the network in
area 1 and area 2, as shown below.
#1 #2
#1 #1 #3
#2
Group
5-2 Setting Data Links
5-2-1 Selecting Manual or Automatic Setting
Specify either the manual or automatic data link mode in the following DM
parameter area of the PC’s CPU Unit of the startup node, using a PC Programming Device.
Note 1. The data link mode can only be specified in the Controller Link Unit. Refer
to the Controller Link Units Operation Manual (W309) for more details.
2. When the Controller Link Support Board has been set as the startup node,
data links must be manually set.
#2
#3Area 1
#4
#4
#3
#4
Group
77
Page 98

Setting Data Links Section 5-2
• • •
Nodes
Controller
Link Unit
CPU Unit
+
C200HX/HG/HE PCs
Nodes
Controller
Link Unit
CPU Unit
CV-series PCs
Transfer
Data link tables
Controller Link
Support Software
IBM PC/AT or
compatible
RS-232C
Nodes
Controller
Link Unit
CPU Unit
CS/CJ-series PCs
3. A data link mode can be set in a data link startup node only. The data link
mode setting is determined by the data link mode of the startup node even
if the data link mode settings of the nodes participating in the data links are
different from the settings in the startup node.
4. In manual setting, a data link table must be set in the data link startup node
and in automatic setting, automatic data link setting parameters must be
set in the data link startup node. Data links will not be started unless the
settings are correct.
5. Always check whether the data link settings for all startup nodes in the corresponding network are correct to prevent starting up using with incorrect
data link modes and parameters. Make sure that both automatic setting
and manual setting modes are not used together in the same network and
that automatic settings with different parameters are not used.
5-2-2 Manual Setting
Transfer the data link tables that were created on the Support Software to the
Controller Link Unit and the Controller Link Support Board at all node participating in the data links.
Transferring from a Programming Device
78
Note 1. Data link tables cannot be set in the Controller Link Support Board using
the CX-Net in the CX-Programmer. Use the CLK Data Link Setting Utility
in FinsGateway or the Controller Link Support Software (version 2.00 or
higher).
2. Refer to the Controller Link Support Software Operation Manual (W369) or
the CX-Net Operation Manual for actual setting procedures.
3. When transferring the data link tables to a Controller Link Unit for a CVseries PC, set the System Protect Keyswitch on the CPU Unit to “NORMAL.” Otherwise, data link tables cannot be written normally.
Page 99

Setting Data Links Section 5-2
Data link tables
IBM PC/AT or
compatible
Controller Link
Support Board
CLK Data Link
Setting Utility in
FinsGateway
Transferring from a Computer Node
Note To create data link tables for nodes in the network using the CLK Data Link
Setting Utility in the FinsGateway, the network must have been constructed
correctly. Set routing tables at each node as required. When using manually
set data links, be sure to delete data link tables for all nodes not participating
in data link. Refer to 1-4 Applications Precautions for details. Refer to FinsGateway online help for actual setting procedures for the CLK Data Link Setting Utility.
79
Page 100

Setting Data Links Section 5-2
5-2-3 Data Link Table Specifications for Controller Link Support Boards
Setting item Setting range
Nodes Optical Ring: 1 to 62 (1 to 32 when optical and optical ring connections are combined.)
Wired: 1 to 32 (Up to 62 nodes can be set by using Repeater Units when the network is
configured with only the 3G8F7-CLK21-EV1, CS1W-CLK23, CJ1W-CLK23, or 3G8F7CLK23-E.)
Set the addresses of the refresh nodes.
First data link status
word
Area 1 Data link
start word
Number of
words
Offset Remote nodes: 0 to one less than number of source words
Area 2 Data link
start word
Number of
words
Offset Remote nodes: 0 to one less than number of source words
The first data link status word is fixed; the setting cannot be changed. Set to –.
Set the start word within the FinsGateway event memory setting range. The defaults are
CIO 0 to CIO 32767 and DM 0 to DM 32767.
Remote nodes: 0 to the number of source words
Set the number of words to be received.
Local node: 0 to 4,000 (3G8F7-CLK@3-E)
0 to 1,000 (3G8F7-CLK21/12/52-EV1)
Set the number of words to be transmitted.
The total number of words in area 1 and area 2 in each node must not exceed 1,000.
The numbers of words in both area 1 and area 2 in each node must not be set to 0.
Set the offset for the data to be received.
Local node: Cannot be set.
This setting is not required if an offset is not used.
Set the start word within the FinsGateway event memory setting range. The defaults are
CIO 0 to CIO 32767 and DM 0 to DM 32767.
Remote nodes: 0 to the number of source words
Set the number of words to be received.
Local node: 0 to 4,000 (3G8F7-CLK@3-E)
0 to 1,000 (3G8F7-CLK21/12/52-EV1)
Set the number of words to be transmitted.
The total number of words in area 1 and area 2 in each node must not exceed 1,000.
The numbers of words in both area 1 and area 2 in each node must not be set to 0.
Set the offset for the data to be received.
Local node: Cannot be set.
This setting is not required if an offset is not used.
Note 1. The maximum number of words for area 1 and area 2 combined must be
no more than 62,000 for optical ring connections and no more than 32,000
words for wired connections or systems that combine optical and optical
ring connections.
2. Data link areas in the Controller Link Support Board are allocated in the
FinsGateway event memory. Refer to the FinsGateway online help for information on the area types and sizes in event memory.
3. Be sure to delete data link tables for all nodes not participating in the data
links.
4. When using the Controller Link Support Software, set the “PC type” to “others.”
5-2-4 Automatic Setting: “Select All”
Data links can be automatically created by setting values in the DM parameter
area of the PC’s CPU Unit of the startup node. The settings are made using a
Programming Console “or the SYSMAC Support Software.
80
 Loading...
Loading...