

Page 1

www.omega.com
e-mail: info@omega.com
User’s Guide
TQ504
Torque Transducer
Shop online at
Page 2
Servicing North America:
USA: One Omega Drive, P.O. Box 4047
ISO 9001 Certified Stamford CT 06907-0047
TEL: (203) 359-1660 FAX: (203) 359-7700
e-mail: info@omega.com
Canada: 976 Bergar
Laval (Quebec) H7L 5A1
TEL: (514) 856-6928 FAX: (514) 856-6886
e-mail: info@omega.ca
For immediate technical or application assistance:
USA and Canada: Sales Service: 1-800-826-6342 / 1-800-TC-OMEGA
®
Customer Service: 1-800-622-2378 / 1-800-622-BEST
®
Engineering Service: 1-800-872-9436 / 1-800-USA-WHEN
®
TELEX: 996404 EASYLINK: 62968934 CABLE: OMEGA
Mexico: En Espan˜ ol: (001) 203-359-7803 e-mail: espanol@omega.com
FAX: (001) 203-359-7807 info@omega.com.mx
Servicing Europe:
Benelux: Postbus 8034, 1180 LA Amstelveen, The Netherlands
TEL: +31 (0)20 3472121 FAX: +31 (0)20 6434643
Toll Free in Benelux: 0800 0993344
e-mail: sales@omegaeng.nl
Czech Republic: Rudé armády 1868, 733 01 Karviná 8
TEL: +420 (0)69 6311899 FAX: +420 (0)69 6311114
Toll Free: 0800-1-66342 e-mail: info@omegashop.cz
France: 11, rue Jacques Cartier, 78280 Guyancourt, France
TEL: +33 (0)1 61 37 29 00 FAX: +33 (0)1 30 57 54 27
Toll Free in France: 0800 466 342
e-mail: sales@omega.fr
Germany/Austria: Daimlerstrasse 26, D-75392 Deckenpfronn, Germany
TEL: +49 (0)7056 9398-0 FAX: +49 (0)7056 9398-29
Toll Free in Germany: 0800 639 7678
e-mail: info@omega.de
United Kingdom: One Omega Drive, River Bend Technology Centre
ISO 9002 Certified Northbank, Irlam, Manchester
M44 5BD United Kingdom
TEL: +44 (0)161 777 6611 FAX: +44 (0)161 777 6622
Toll Free in United Kingdom: 0800-488-488
e-mail: sales@omega.co.uk
OMEGAnet®Online Service Internet e-mail
www.omega.com info@omega.com
It is the policy of OMEGA to comply with all worldwide safety and EMC/EMI regulations that
apply. OMEGA is constantly pursuing certification of its products to the European New Approach
Directives. OMEGA will add the CE mark to every appropriate device upon certification.
The information contained in this document is believed to be correct, but OMEGA Engineering, Inc. accepts
no liability for any errors it contains, and reserves the right to alter specifications without notice.
WARNING: These products are not designed for use in, and should not be used for, patient-connected applications.
Page 3

INDEX
1. Applications and typical attributes ............................................... Page 1
2. Description of the measurement system ...................................... Page 1
2.1 Mechanical design ................................................................. Page 1
2.2 Electrical design ..................................................................... Page 2
2.3 Angle-of-rotation transducer ............................................... Page 3
3. Electrical connection of the torque transducer ............................ Page 4
3.1 Connector pin assignments .................................................. Page 5
3.1.1 Signals, angle outputs ........................................................... Page 6
3.2 Laying of the output signal cables ...................................... Page 6
3.3 Placement of conductors in cable ........................................ Page 6
4. Mechanical installation of the torque transducer........................ Page 8
4.1 Suggestions for installation .................................................. Page 8
5. Mechanical calibration ..................................................................... Page 9
5.1 Assembly of a simple calibrating setup ............................ Page 10
5.2 Sample calculation of lever arm length............................. Page 10
5.3 Electrical calibration ............................................................. Page 11
6. Maintenance...................................................................................... Page 11
7. Troubleshooting guide for transducer shaft............................... Page 12
See Data Sheet for technical specifications
TQ504 Torque Transducer
i
Page 4
1. Applications and typical attributes
• Torque transducer with inductive angular position measurement system.
• Measurement of constant and variable torques.
• Torque measurement on a rotating shaft.
• For laboratory, production and quality assurance applications.
• Built- in instrument amplifier.
• Built- in angle-of-rotation transducer.
2. Description of the measurement system
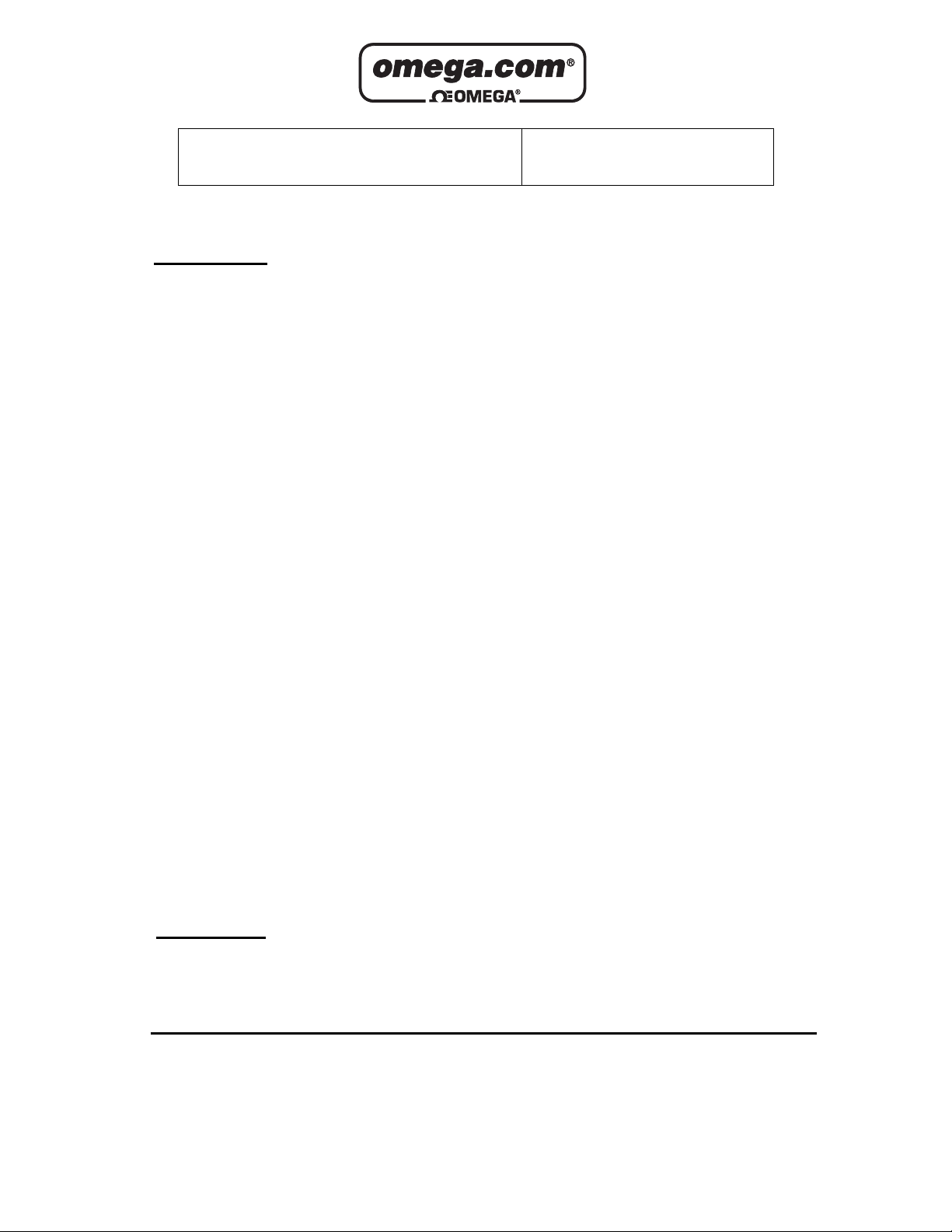
2.1 Mechanical design
• The transducer consists of a stator through which a bearing-mounted shaft
passes.
• A certain length of the shaft is utilized to convert the torque into a proportional
torsional angle.
• This torsional angle or angle of twist is measured between the two ends of this
shaft length by an inductive (wave-form) angular position measurement
system.
• The inductive angular position measurement system converts the angle of
twist into a proportional electrical signal.
TQ504 Torque Transducer
1
Bearing
Angular
Sensor
Pulsedisk Stator Inductive (wave-
Rotary
transformers
form) angular
position measure-
ment system
Bearing
Torsion
length
Page 5
• The electrical power for operation of the inductive angular position
measurement system, which rotates along with the shaft, is provided by means
of a rotary transformer.
• The electrical output signal, which is proportional to the torque, is transferred
to the stator by a second rotary transformer.
• The connection box on the stator contains the electronics, the power supply
unit, and the instrument amplifier.
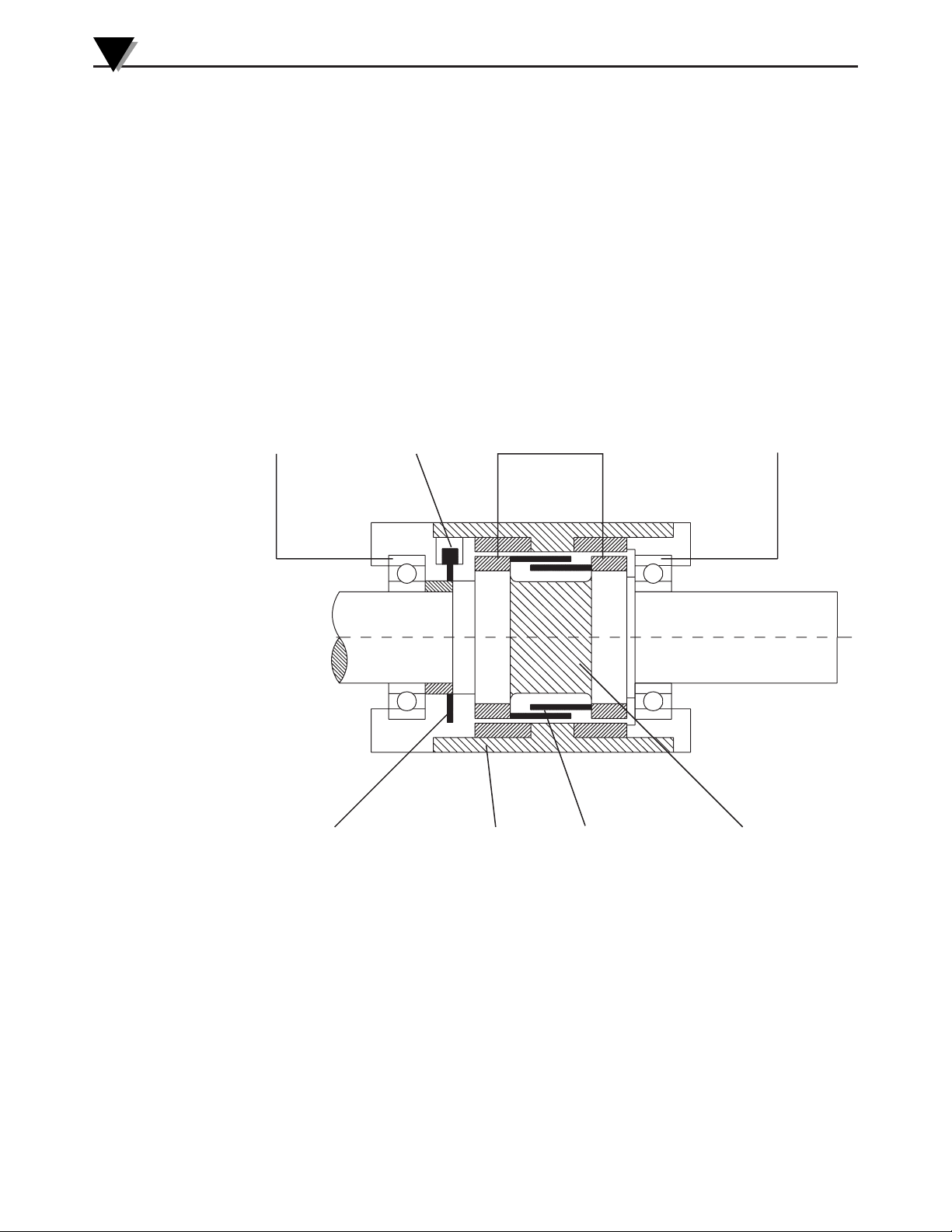
2.2 Electrical design
The built-in electronics comprise the following functional groups:
• Oscillator for generation of the AC input voltage
• Preamplifier for the output signal
• Phase-sensitive rectifier for conversion of the AC output signal into a DC
voltage
• Output amplifier
TQ504 Torque Transducer
2
Mechanical part
of transducer
Inductive (waveform) angular
Oscillator
120kHz
position measurement system
Preamplifier
Output
amplifier
Rotary transformers Phase-sesitive
rectifier
Page 6
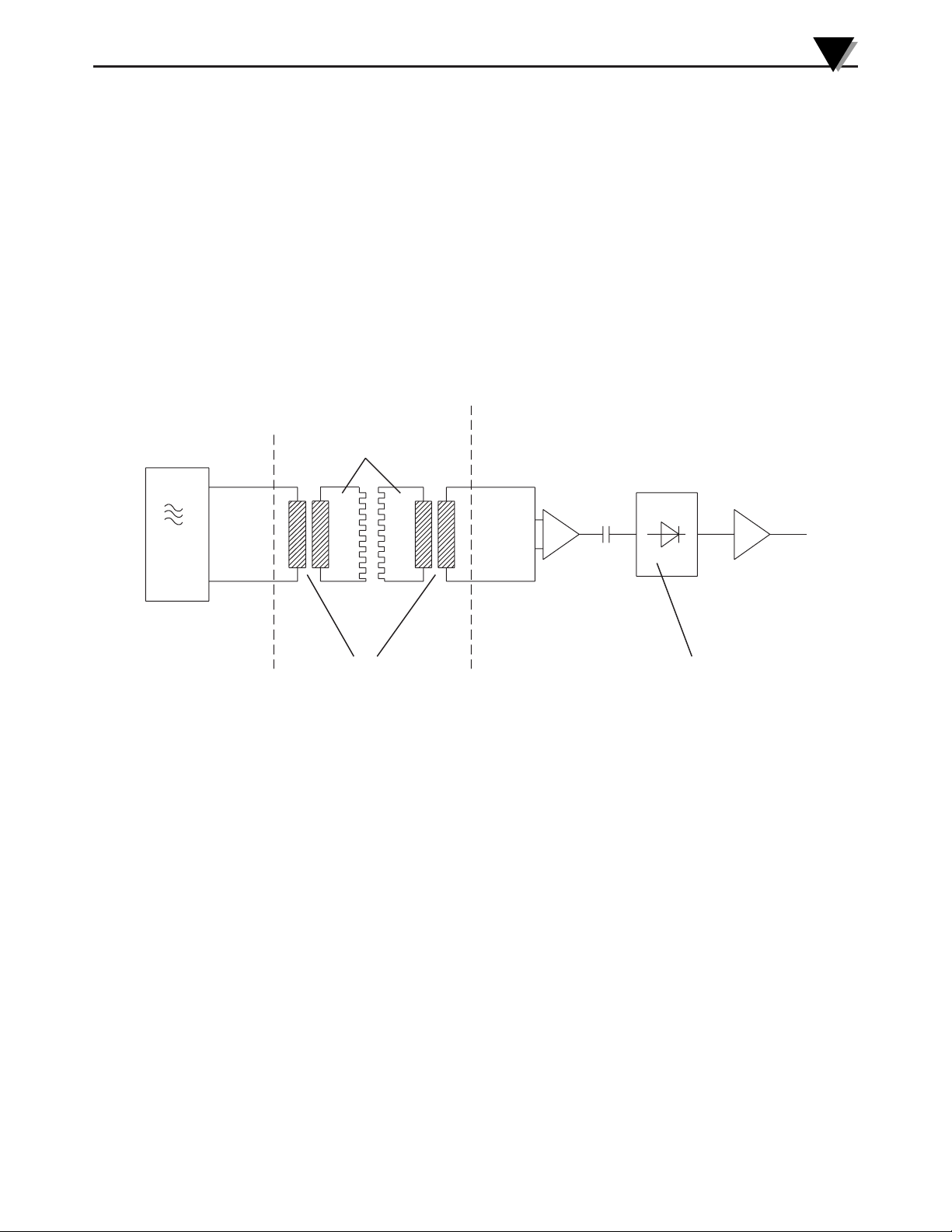
2.3 Angle-of-rotation transducer
Schematic of angle-of-rotation measurement system
1. Rotating shaft
2. Encoder disk
3. Double-arm photoelectric barrier
4. Open-collector output (external pull-up resistor required)*
Features:
• 360 slots in the encoder disk
• Two double-arm photoelectric barriers 90° apart.
• Number of pulses generated proportional to angle of rotation.
* The ohmic value of the resistor depends on the maximum speed of rotation and
the cable length (e.g. 1500 rpm and a 4 m cable, R=3.3kΩ).
TQ504 Torque Transducer
3
+
+5
V
+5
V
1
3
E
3
B
4
0
V
5V
V
0
2
intern
+5
V
4
Page 7

3. Electrical connection of the torque transducer
• Cable type: at least 12 conductors, e.g. LIYCY 12 x 0.14
• Max. cable length: 15 m
TQ504 Torque Transducer
4
Connector
Shielded
cable
To power supply
and to display
Transducer
Page 8

3.1 Connector pin assignments
Description of interface for Type, art.-no.: 7203
Angle outputs: open collector outputs with internal 10kΩ pull-up to +Vop
Built in connector: Binder Series 680, type 09-0331-80-12 or equivalent
Cable diagram with plugs on both sides
TQ504 Torque Transducer
5
Top view of connector on
transducer
Function Pin Description
supply voltage A -U
B
-10.5..-16V, ≤ 30mA
angle output
B <1 360 impulse per revolution duty cycle
50/50 ±20%
moment output
CU
a
±5V bei ±Md
nenn
on ≥ 2k_
+5V at calibration
Ri=10_, output short circuit proof acc.
GND
moment output D GND GND Reference for U
a
supply voltage
E GND GND Reference for Ub, R
kod
, Kal, <1),
<2
supply voltage F +U
b
+10,5V..+16V, ≤ 30mA
angle output
G <2 Signal 90°lagging to signal on Pin B
on rotation to the right
speed puls output H - 60-pulse / rotation
free J
calibration input
K Kal Off: 0V – 2V; On: 3,5V – 30V
Input impendence: > 100 k_
measuring range coding
LR
kod
free
shield M not used in the transducer
Page 9

3.1.1 Signals, angle outputs
3.2 Laying of the output signal cables
-Note on safety-
• Do not lay together with control lines or lines carrying a high
current.
• Do not lay close to strong electromagnetic fields, e.g. those of transformers,
welding equipment, contactors, motors, etc.
• If the above is unavoidable, the cables must be laid in grounded heavygage
steel conduit.
• At the transducer, lay the cables in a sling in order to prevent vibrationinduced damage to them.
3.3 Placement of conducters in cable
In order to prevent the measurement signal being distorted by the angle pulses,
the corresponding conductors should be separated within the cable.
TQ504 Torque Transducer
6
1
0V
t
2
0V
t
Positive pulse
Option
Pulse 90° phase-shifted with
respect to angle
Example application:
Detection of direction of
rotation (clockwise/counterclockwise)
Page 10

The cable length has virtually no influence on the measurement signal, but in the
case of the angle outputs the external pull-up resistances must be properly
adjusted.
TQ504 Torque Transducer
7
Example: 10-conductor cable
0V
0V
cal.
R
rod
–15V
+15V
V
out
+V
op
10k_
Connection cable
max. 15m
+V
op
Pull-up-resistanceR
R
(kΩ)
10
at n
= 1500 rpm
max
Resistance
1
2 10 1(m)
Cable length
Page 11

4. Mechanical installation of the torque transducer
Transducer with fixed stator:
2 holes are provided in the transducer housing for this purpose.
• Use displaceable couplings as both shaft ends that are capable of
accommodating angular, radial and axial misalignment.
• Good results have been obtained with miniature couplings stiff against torsion
such as those described in data sheet 8303.
At torques of 50 Nm or greater, it is also possible to install the transducer
without fixed stator:
• In this case, use flexible couplings at both ends.
Caution: during installation no impermissibly high torques may be
allowed to arise between the two ends of the torque transducer shaft.
4.1 Suggestions for installation
Transducer with fixed stator and couplings able to accommodate angular, radial
and axial misalignment at both ends.
TQ504 Torque Transducer
8
Coupling able to accommodate radial, angular and
axial misalignment
Shaft Shaft
Torquetransducer
Cable
connection
Attachment
angle
Coupling able to accommodate radial, angular and
axial misalignment
BearingBearing
Page 12

Transducer installed without fixed stator, with flexible coupling at each end.
This type of installation is possible at torques of 50 Nm and greater.
5. Mechanical calibration
To perform this, a calibration setup with lever arm and weights is needed to
create a torque.
Steps for calibration:
a) Apply the rated torque to the transducer, then remove the load again.
b) Precisely adjust the transducer to the zero point.
c) Apply a known torque to the transducer.
d) Set the indicator to the proper value.
Recording of a calibration curve:
a) Calibrate the transducer as described above.
b) Progressively apply greater torques to the transducer in steps of 1/10 up to
the full rated torque. Then gradually remove the torque in the same way. At
each step, wait at least 30 seconds for the torque reading to stabilize, and then
record.
TQ504 Torque Transducer
9
Torquetransducer
Bearing
Shaft Shaft
Flexible coupling
Cable
connection
Bearing
Page 13

5.1 A simple calibrating setup
5.2 Sample calculation of lever arm length
TQ504 Torque Transducer
10
L=
Mt
m - g
eg. m = 1 kg. Mt = 10 Nm
L=
10Nm sec
2
1 kg _ 9.80665
= 1,0197 m
Lever arm
KK
Lever arm
bearing
K = coupling able to accommodate
axial and radial misalignments
Countersupport
Lever armTorque transducer
Bearing for lever
arm (double
bearing)
Weight
(calibrated)
Mt = torque
L = required lever arm length
m = required mass
g = 9.80665 m/sec2 - normal gravitational
acceleration (varies slightly from place to place)
Mt
M
L
Page 14

5.3 Electrical calibration
A calibration control facility is integrated in the transducer to permit electrical
calibration.
Procedure for electrical calibration:
• Remove all mechanical loads from the transducer (no torque).
• Apply the calibration voltage Vc to pin K referenced to pin E.
• An output signal corresponding to the rated torque will be emitted.
6. Maintenance
• Type IE transducers require virtually no maintenance.
• The service life expectancy of the bearings within the rated temperature range
is approx. 20,000 hours.
• The service life expectancy of the bearing within the operating temperature
range is approx. 10,000 hours.
• The bearings can only be replaced in the factory.
• For high-precision applications: recalibrate the transducer once annually
(calibration at the factory or using an appropriate calibration setup).
• Once a month, check the cable connectors to make sure that they are securely
seated.
• Check the cables for damage once a month.
TQ504 Torque Transducer
11
5V
CAL
+Vs
GND
Transducer
+5V
Page 15

7. Troubleshooting guide for transducer shaft
TQ504 Torque Transducer
12
Problem Probable causes Remedial action
Shaft does not rotate
Bearings are defective due to:
freely
a) Torsional or flexional vibrations
b) Excessive axial or radial loads Return to factory
c) Old or soiled bearings
d) Bent shaft
Zero point displacement Rotational vibration Readjust zero point on
≤ 2 % Shock forces instrument amplifier
Zero offset between 2%
Transducer has been overloaded The zero point can be
and 5% of range
Shock forces recalibrated once at
Rotational vibration the instrument amplifier
Transducer has
Transducer has been overloaded
hysteresis between
by changing loads or rotational Return to factory
clockwise and counter-
Rotation vibration
clockwise torque
Page 16

NOTES:
TQ504 Torque Transducer
13
Page 17

WARRANTY/DISCLAIMER
OMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a
period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month
grace period to the normal one (1) year product warranty to cover handling and shipping time. This
ensures that OMEGA’s customers receive maximum coverage on each product.
If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service
Department will issue an Authorized Return (AR) number immediately upon phone or written request.
Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no
charge. OMEGA’s WARRANTY does not apply to defects resulting from any action of the purchaser,
including but not limited to mishandling, improper interfacing, operation outside of design limits,
improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of
having been tampered with or shows evidence of having been damaged as a result of excessive corrosion;
or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating
conditions outside of OMEGA’s control. Components which wear are not warranted, including but not
limited to contact points, fuses, and triacs.
OMEGA is pleased to offer suggestions on the use of its various products. However,
OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any
damages that result from the use of its products in accordance with information provided by
OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by it will be
as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR
REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESS OR IMPLIED, EXCEPT THAT OF TITLE,
AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND
FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF
LIABILITY: The remedies of purchaser set forth herein are exclusive, and the total liability of
OMEGA with respect to this order, whether based on contract, warranty, negligence,
indemnification, strict liability or otherwise, shall not exceed the purchase price of the
component upon which liability is based. In no event shall OMEGA be liable for
consequential, incidental or special damages.
CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic
Component” under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical
applications or used on humans. Should any Product(s) be used in or with any nuclear installation or
activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility
as set forth in our basic WARRANTY/ DISCLAIMER language, and, additionally, purchaser will indemnify
OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the
Product(s) in such a manner.
RETURN REQUESTS/INQUIRIES
Direct all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE
RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN AUTHORIZED RETURN
(AR) NUMBER FROM OMEGA’S CUSTOMER SERVICE DEPARTMENT (IN ORDER TO AVOID
PROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return
package and on any correspondence.
The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent
breakage in transit.
FOR W
ARRANTY RETURNS, please have the
following information available BEFORE
contacting OMEGA:
1. Purchase Order number under which the product
was PURCHASED,
2. Model and serial number of the product under
warranty, and
3. Repair instructions and/or specific problems
relative to the product.
FOR NON-WARRANTY REPAIRS,
consult OMEGA
for current repair charges. Have the following
information available BEFORE contacting OMEGA:
1. Purchase Order number to cover the COST
of the repair,
2. Model and serial number of the product, and
3. Repair instructions and/or specific problems
relative to the product.
OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords
our customers the latest in technology and engineering.
OMEGA is a registered trademark of OMEGA ENGINEERING, INC.
© Copyright 2002 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied,
reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the
prior written consent of OMEGA ENGINEERING, INC.
Page 18

M2958/0602
Where Do I Find Everything I Need for
Process Measurement and Control?
OMEGA…Of Course!
Shop online at www.omega.com
TEMPERATURE
Thermocouple, RTD & Thermistor Probes, Connectors, Panels & Assemblies
Wire: Thermocouple, RTD & Thermistor
Calibrators & Ice Point References
Recorders, Controllers & Process Monitors
Infrared Pyrometers
PRESSURE, STRAIN AND FORCE
Transducers & Strain Gages
Load Cells & Pressure Gages
Displacement Transducers
Instrumentation & Accessories
FLOW/LEVEL
Rotameters, Gas Mass Flowmeters & Flow Computers
Air Velocity Indicators
Turbine/Paddlewheel Systems
Totalizers & Batch Controllers
pH/CONDUCTIVITY
pH Electrodes, Testers & Accessories
Benchtop/Laboratory Meters
Controllers, Calibrators, Simulators & Pumps
Industrial pH & Conductivity Equipment
DATA ACQUISITION
Data Acquisition & Engineering Software
Communications-Based Acquisition Systems
Plug-in Cards for Apple, IBM & Compatibles
Datalogging Systems
Recorders, Printers & Plotters
HEATERS
Heating Cable
Cartridge & Strip Heaters
Immersion & Band Heaters
Flexible Heaters
Laboratory Heaters
ENVIRONMENTAL
MONITORING AND CONTROL
Metering & Control Instrumentation
Refractometers
Pumps & Tubing
Air, Soil & Water Monitors
Industrial Water & Wastewater Treatment
pH, Conductivity & Dissolved Oxygen Instruments
 Loading...
Loading...