

Page 1
CONTROLS
Re-Order from
omegamation.com
Omegamation
TM
1-888-55-OMEGA
1-888-55-66342
1-888-55-66342
Instruction Manual
Field Programmable Closed Loop DC Speed Control
MDP CONTROL SERIES
LT61 (0709)
P.O. Box 10
5000 W. 106th Street
Zionsville, Indiana 46077
Phone (317) 873-5211
Fax (317) 873-1105
www.dartcontrols.com
A-5-3241L
Page 2
Quick Jump
What models and options are available?
See page 3.
Looking for detailed specifi cations?
See page 3 & 4.
Want to get started fast?
See basic electrical hook-up details on page 8.
See mechanical installation details on page 4 & 5.
See some sample applications starting on page 24.
Need Help?
See troubleshooting on page 29.
Dart Controls, Inc. (DCI) warrants its products to be free from defects in material and workmanship. The exclusive remedy
Warranty
for this warranty is DCI factory replacement of any part or parts of such product which shall within 12 months after delivery
to the purchaser be returned to DCI factory with all transportation charges prepaid and which DCI determines to its satisfaction to be defective. This warranty shall not extend to defects in assembly by other than DCI or to any article which has
been repaired or altered by other than DCI or to any article which DCI determines has been subjected to improper use. DCI
assumes no responsibility for the design characteristics of any unit or its operation in any circuit or assembly. This warranty is
in lieu of all other warranties, express or implied; all other liabilities or obligations on the part of DCI, including consequential
damages, are hereby expressly excluded.
NOTE: Carefully check the control for shipping damage. Report any damage to the carrier immediately. Do not attempt to
operate the drive if visible damage is evident to either the circuit or to the electronic components.
All information contained in this manual is intended to be correct, however information and data in this manual are subject
to change without notice. DCI makes no warranty of any kind with regard to this information or data. Further, DCI is not
responsible for any omissions or errors or consequential damage caused by the user of the product. DCI reserves the right
to make manufacturing changes which may not be included in this manual.
Improper installation or operation of this control may cause injury to personnel or control failure. The control must
be installed in accordance with local, state, and national safety codes. Make certain that the power supply is disconnected before attempting to service or remove any components!!! If the power disconnect point is out of sight,
lock it in disconnected position and tag to prevent unexpected application of power. Only a qualifi ed electrician or
service personnel should perform any electrical troubleshooting or maintenance. At no time should circuit continuity be checked by shorting terminals with a screwdriver or other metal device.
WARNING
Page 3

Table of Contents
Introduction ....................................................................................................................................... 2
General Features .............................................................................................................................. 2
Models & Options ............................................................................................................................. 3
Model Table ................................................................................................................................... 3
Available Options .......................................................................................................................... 3
Recommended Accessories ......................................................................................................... 3
Agency Approvals ......................................................................................................................... 3
Specifi cations ................................................................................................................................... 3
Electrical ....................................................................................................................................... 3
Mechanical ................................................................................................................................... 4
Environmental ............................................................................................................................... 4
Dimension Chart ........................................................................................................................... 4
Installation and Mechanical Dimensions ....................................................................................... 5
Exploded Panel View .................................................................................................................... 5
Cut-out and Mounting Dimensions ............................................................................................... 6
PU-E Series Pickup Installation .................................................................................................... 7
Electrical Installation & Diagrams ................................................................................................... 8
P1 Terminal Block Hook-Up Diagrams .......................................................................................... 8
P1 Terminal Block Descriptions .................................................................................................... 9
-1 Option Wiring .......................................................................................................................... 10
Basic Operating Instructions ........................................................................................................ 10
Control Algorithm Discussion ..................................................................................................... 10
Pulse-Accumulation Loop PI Tuning .......................................................................................... 10
Master (Rate and Time) and Follower (Ratio) Modes Explained ................................................ 11
Visual Reference ........................................................................................................................ 12
How to Change a Parameter's Value (The Short Story) ............................................................. 12
Operating the User Interface (The Long Story) .......................................................................... 12
Detailed Confi guration Instructions ............................................................................................. 13
Default Confi guration .................................................................................................................. 13
Resetting the Unit to Factory Defaults ........................................................................................ 13
JP1 (Program Enable Jumper) .................................................................................................. 13
Software Parameters .................................................................................................................. 14
Parameter Descriptions .............................................................................................................. 16
Application Examples .................................................................................................................... 24
Pump Controller with Audible and Visual Alarm ......................................................................... 24
Conveyor Oven Controller with Two Preset Process Times ........................................................ 25
Synchronized Conveyor Controller with Jog Switch ................................................................... 26
Troubleshooting .............................................................................................................................. 29
Technical Support Options .......................................................................................................... 29
What's Special About www.dartcontrols.com? ........................................................................... 29
1
Page 4

Introduction
The MDP series motor controls are compact, microprocessor-based units capable of being either fi eld
or factory confi gured for a number of industry's motion control needs. These controls are designed
around a pulse-accumulation PI algorithm. They can be easily confi gured to operate as a digital speed
controller, time-based process controller, or a ratiometric follower controller in master-slave systems.
Utilizing Dart's new modular bus design techniques, the MDP series is ideal for volume OEM applications
requiring specialized inputs and outputs. Contact Dart Controls' Sales Department for details. This
fl exibility makes the MDP series ideal for applications such as:
Water and Waste Treatment Systems
Conveyor Oven Controllers
Synchronized Conveyor Lines
Its durable 1/8 and 1/4 DIN aluminum housings can be easily mounted in a panel or control cabinet.
New optional pluggable terminal block allows the installer to quickly install or replace units without the
hassle of physically removing and reattaching wires. The units can be ordered with either standard
European-style terminal block or optional “pluggable” connector.
General Features
- Microprocessor-based design combines the ultimate in responsiveness and accuracy in one package
- Digital closed-loop algorithm ensures long-term accuracy of +/-1/2 RPM of set speed or equiv.
- Non-volatile memory stores adjustable parameters even when power has been removed
- Factory or fi eld programmable via front-panel keypad
- Adjustable parameters include min, max, accel, decel, display options, alarm options, etc.
- Internal program-enable jumper selectively prevents tampering with unit’s confi guration
- Universal power supply accepts line voltages inputs from 85-265VAC (85-250 VAC for MD3E models) @
50-60Hz without switches or jumpers. The unit automatically adjusts as needed.
- Transient voltage protection prolongs unit's life in harsh industrial environments
- Compatible with a variety of signal input types including: Hall-Effect Pickups, Photoelectric, TTL, etc.
Note: Open collector devices must be capable of sinking 3mA.
- Self-contained power supply for external sensor, limited to 5V @ 50mA
- Programmable alarm output with Form C contacts rated to 250VAC @ 5A
- Flexible user inputs support inhibit, emergency stop, and jog functionality.
- 1/8 and 1/4 DIN durable aluminum housing for panel mounting the MD10P and MD3P, respectively.
- Large 4 digit, 1/2” LED display
- G.E. Lexan membrane and gasket (which are included) meet NEMA 4X standards when used with
NEMA 4X enclosures
- European terminal block or pluggable terminal block available
- Recognized, fi le #E78180 (MD10P, MD3P & MD3E)
- Wide operating ambient temperature range of -10C to 45C (14F to 113F)
- Multiple operating modes including:
• Master, Rate Mode – Controls in rate unit such as RPM, Gallons per Second, etc.
• Master, Time Mode – Controls in time unit such as HH:MM, MM:SS, SS:TT, or other unit
• Follower Mode – Controls in percentage of master rate. This mode allows the MDP control to
precisely follow the actions of a master process without any long-term loss of position
2
Page 5
Models & Options
Model Table
Model
MD10P
MD3P 85-265VAC
MD3E 85-250VAC
Input Voltage
@ 50 - 60Hz
85-265VAC
Output Voltage
@ 120VAC
(@ 240VAC)
90VDC
(180VDC)
90VDC
(180VDC)
90VDC
(180VDC)
Max. Output H.P.
@ 120VAC
(@240VAC)
1/2
1
1
2
1
2
Max Continuous
Armature DC
Amps
5
5
10
10
10
10
Available Options
Option Suffi x Description Example
-1
-P Optional pluggable European-style terminal block MD10P-P, MD3P-1-P
-9 Blank Lexan MD10P-9
OPT3 Sine wave to square wave converter for magnetic pickup Ordered Separately
Expansion board which adds support for remote push button wiring
via a European-style terminal block.
Recommended Accessories
Model Description
PU-2E Hall-Effect Pickup, Single Channel 1 1.0 – 50,000 RPM
PU-4E Hall-Effect Pickup, Single Channel 2 0.5 – 25,000 RPM
PU-20E
PU-40E Hall-Effect Pickup, Single Channel 20 0.05 – 2,500 RPM
Hall-Effect Pickup, Single Channel
Pulses per
Revolution
10 0.1 – 5,000 RPM
RPM Range When Used With
Pickup or
Encoder
Required?
Yes
Yes
Yes
MD10P-1, MD3P-1
MD10P & MD3P
Agency Approvals
Recognized Component MD10P, MD3P ........................................................................................... E78180
MD3E ....................................................................................................................................................34M5
NEMA 4X ....................................................................................................................................MD10P / MD3P / MD3E
Specifi cations
Electrical
Line Input Voltage .................................................... Any Voltage from 85-265 VAC (85-250 VAC for MD3E models)
Line Input Frequency ...................................................................................................... Any Freq. from 48-62 Hertz
Signal Input Voltage Range .................................................................................. 0-5VDC to 0-24VDC square wave
Signal Input Frequency Range ....................................................................................0 – 50,000 Pulses per Minute
Display Range ....................................................................................................................................0.001 – 99,990
Units of Operation ..................................................................................................... User Programmable, any Unit
Sensor / Pickup Power Supply ............................................................................................................... 5V @ 50mA
Isolated Alarm Relay Output Ratings ..................................................................................................250VAC @ 5A
Average Armature Output Voltage ................................................. Line Input Voltage Dependent (See model table)
Design Overload Capacity .............................................................................................................200% for 1 minute
(Higher frequencies are possible when using internal frequency divisor / prescaler)
3
Page 6
Mechanical
Display Type .................................................................................................................LED, Red, 4 Digit, ½” Height
Housing Type MD10P & MD3P (with supplied gasket) ...............................................................................NEMA 4X
MD3E .......................................................................................................................................................... NEMA 4
Connector Style (pluggable connector optional) ................................................... 12-position 5mm European Style
Terminal Block Torque Setting ................................................................................................4.4 in. lb. Max or .5Nm
Faceplate Material ......................................................................................... Polycarbonate with GE Lexan Overlay
Housing Material ........................................................................................................................................Aluminum
Length MD10P & MD3P(Required Panel Depth) ......................................................................... 4.625”, 117.48mm
Faceplate Width ........................................................................................................................... 4.539”, 115.29mm
Weight MD10P ............................................................................................................. 0.8425 lb, 13.48 oz, 382.14g
MD3P ................................................................................................................... 1.52 lb, 24.32 oz, 689.44g
MD3E ................................................................................................................... 1.64 lb, 26.24 oz, 743.88g
Environmental
Operating Temperature Range ----------------------------------------------------------------------------- -10C to 45C (15F to 115F)
Operating Humidity Range ----------------------------------------------------------------------------------------- 95%, non-condensing
Dimension Chart
Model Width Height Depth
MD10P English (inches)
Housing 3.62 1.66 4.625
Lens 4.539 2.289 0.375
MD10P Metric (millimeters)
Housing 91.94 42.16 117.27
Lens 115.28 58.14 9.53
MD3P English (inches)
Housing 3.60 3.497 4.625
Lens 4.539 4.179 0.375
MD3P Metric (millimeters)
Housing 91.44 88.82 117.27
Lens 115.28 106.15 9.53
MD3E English (inches)
Assembly 5.53 7.40 3.90
MD3E Metric (millimeters)
Assembly 140.46 187.96 99.06
4
Page 7
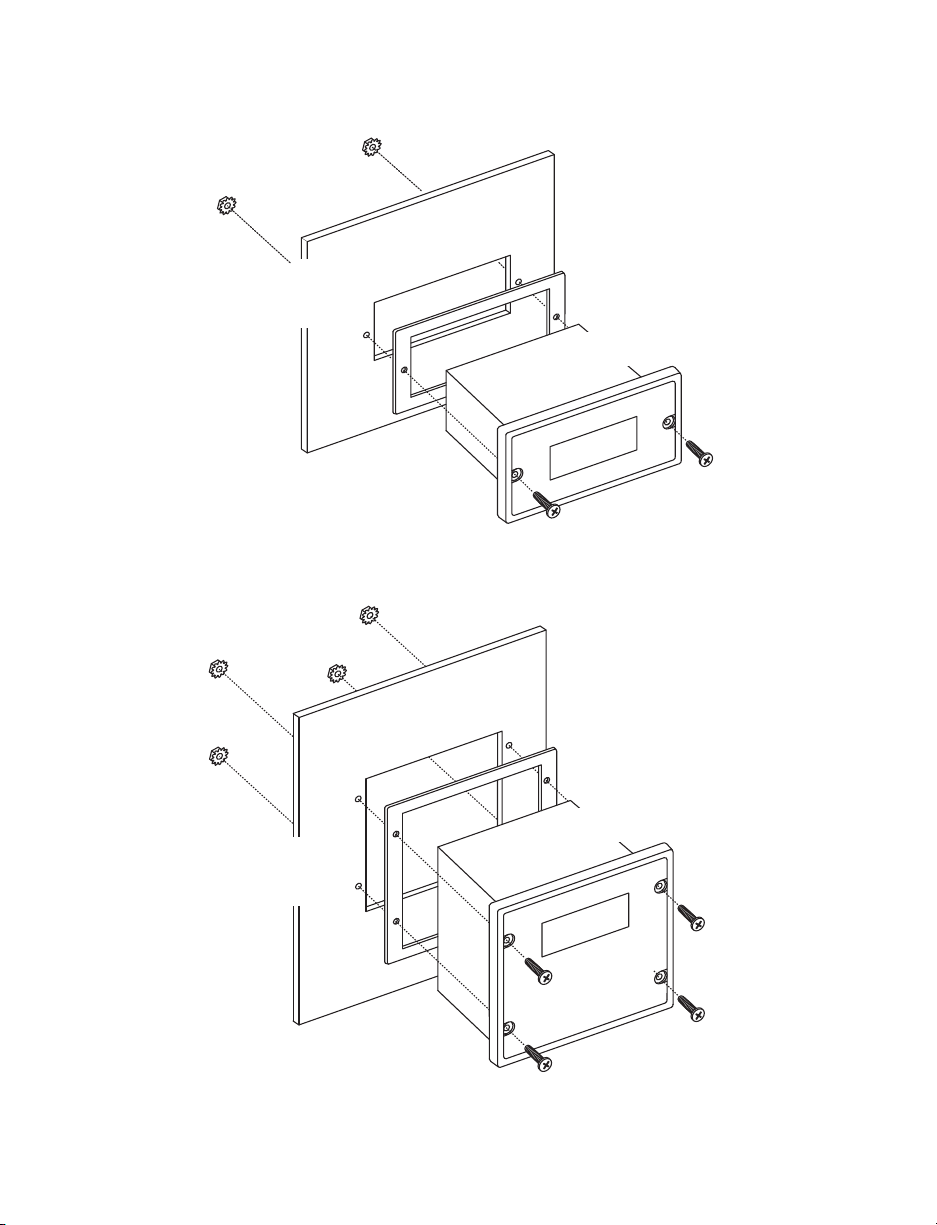
Installation and Mechanical Dimensions
Exploded Panel View
CUSTOMER
MOUNTING PANEL
(HOLE CUT-OUT FOR CONTROL
HOUSING APPROXIMATELY
3.622" WIDE BY 1.770" HIGH)
MD10P
CONTROL
SUPPLIED WITH EACH CONTROL:
1) GASKET
2) (2) 6-32 X 3/4 PANHEAD BLACK OXIDE STAINLESS SCREWS
3) (2) #6 NUT WITH LOCKWASHER
PANEL MOUNTING GASKET
(WITH THE ADHESIVE SIDE OF
GASKET FACING THE CUSTOMER
MOUNTING PANEL)
CUSTOMER
MOUNTING PANEL
(HOLE CUT-OUT FOR CONTROL
HOUSING APPROXIMATELY
3.622" WIDE BY 3.622" HIGH)
SUPPLIED WITH EACH CONTROL:
1) GASKET
2) (4) 6-32 X 3/4 PANHEAD BLACK OXIDE STAINLESS SCREWS
3) (4) #6 NUT WITH LOCKWASHER
5
PANEL MOUNTING GASKET
(WITH THE ADHESIVE SIDE OF
GASKET FACING THE CUSTOMER
MOUNTING PANEL)
MD3P
CONTROL
Page 8
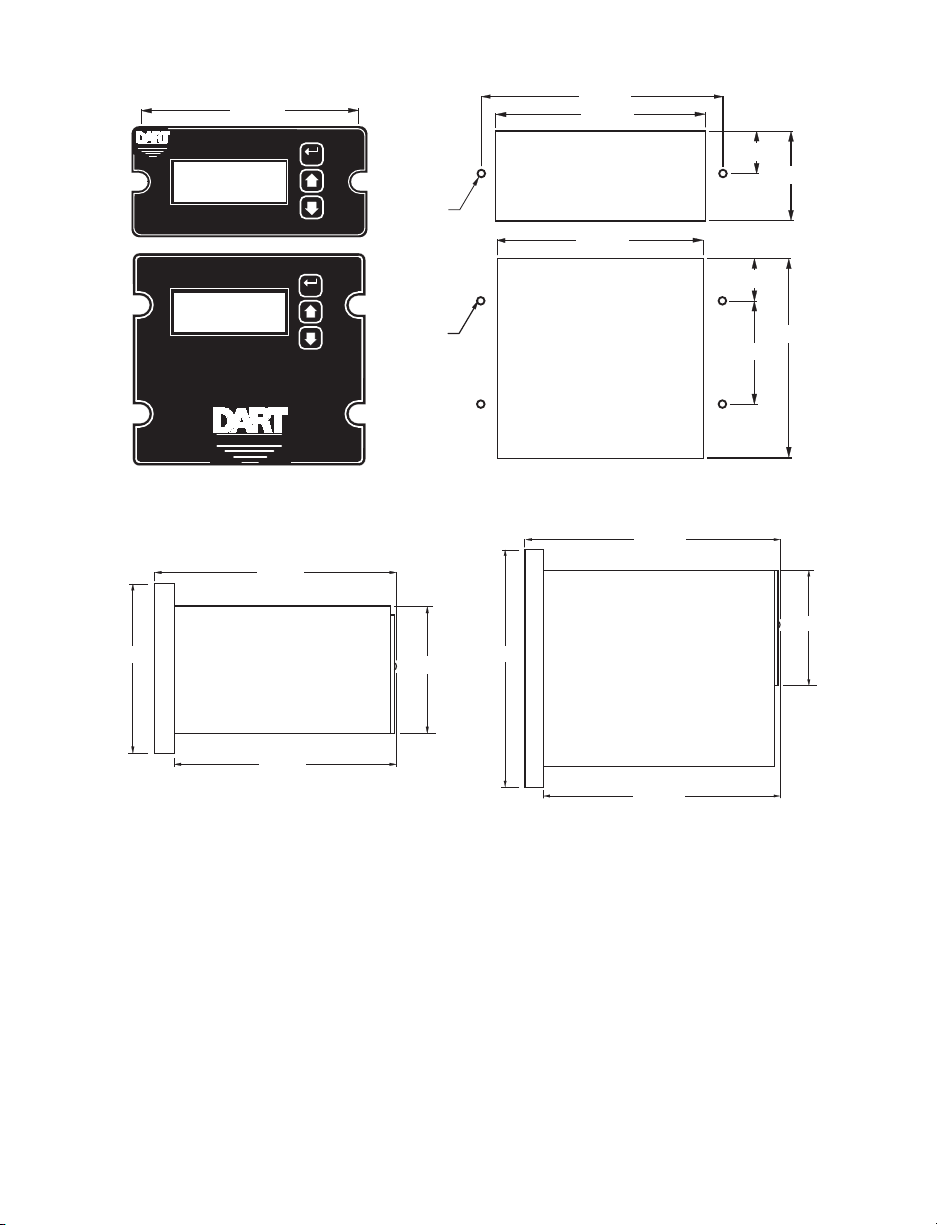
Cut-out and Mounting Dimensions
4.000"
CONTROLS
MICRO-DRIVE
MICRO-DRIVE
Tach
ValuPage
Ite
Tach
Ite
ValPage
m
ENTER
.140" x 2
4.000"
3.622"
MD10P
HOUSING DEPTH
4.625"
PANEL CUT-OUT
3.622
0.885"
1.770"
ENTER
MICRO-DRIVE
CONTROLS
MD10P and MD3P Dimensions
5.000"
2.289"
4.625"
.140" x 4
1.656"
4.179"
MD3P
HOUSING DEPTH
4.625"
PANEL CUT-OUT
5.000"
4.625"
0.811"
3.622"
2.000"
1.928"
6
Page 9
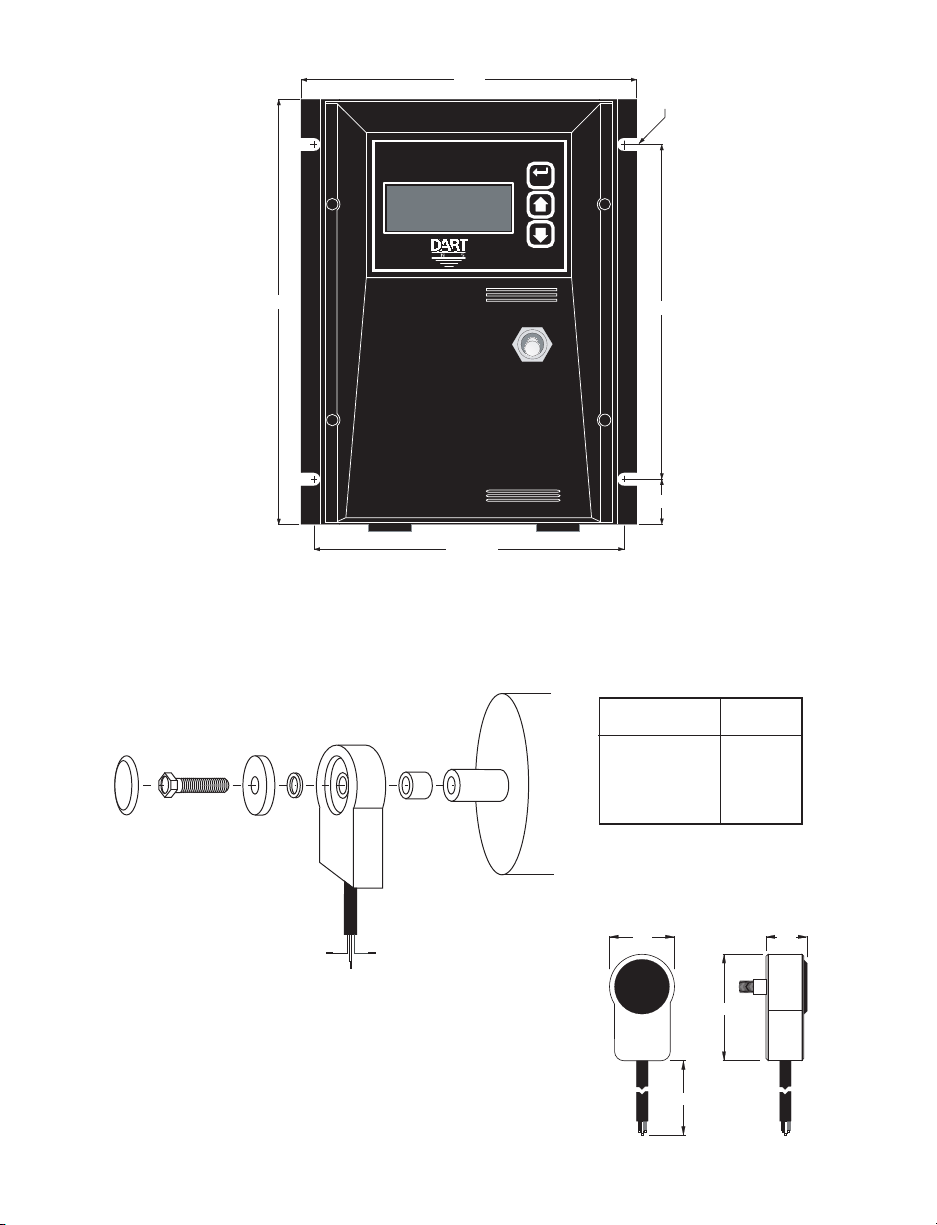
MD3E Mounting and Dimensions
5.530
7/32" TYP.
(4 SLOTS)
.350 DEEP
CONTROLS
ValuPage
5.125 TYP.
Tach
ENTER
5.500
ON
OFF
.750
Item
7.400
PU-E Series Pickup Installation
The PU-E series pickup is an economical way to monitor motor speed. Its patented design provides for
ease of installation in otherwise diffi cult to reach areas. The PU-E operates from a +5V power supply,
producing a 5 volt square wave whose frequency is proportional to speed. This signal is fed into the
MDP control as a speed or position reference for the microprocessor.
dust
cover
10-32
screw
magnet
disc
flat
washer
PU-E
bearing
3/16"
spacer
tapped
motor
shaft
Model
Number
PU-2E
PU-4E
PU-20E
PU-40E
Pulses per
Revolution
1
2
10
20
white wire
signal
red wire
+5 volts
black wire
common
DO NOT OVER TIGHTEN MOUNTING SCREW !!
CAUTION:
No other mounting screws are necessary, as the cord
will keep the unit from rotating.
7
Dimensions
1.60 .875
2.40
72.00
Page 10
Caution: The PU-E cord should not be grouped with other wires or cords. For applications with PU-E
wire over 6 feet long, or noisy environments, a shielded cable is recommended. Connect the shield to
the common terminal on the MDP, leaving the shield on the PU-E end fl oating.
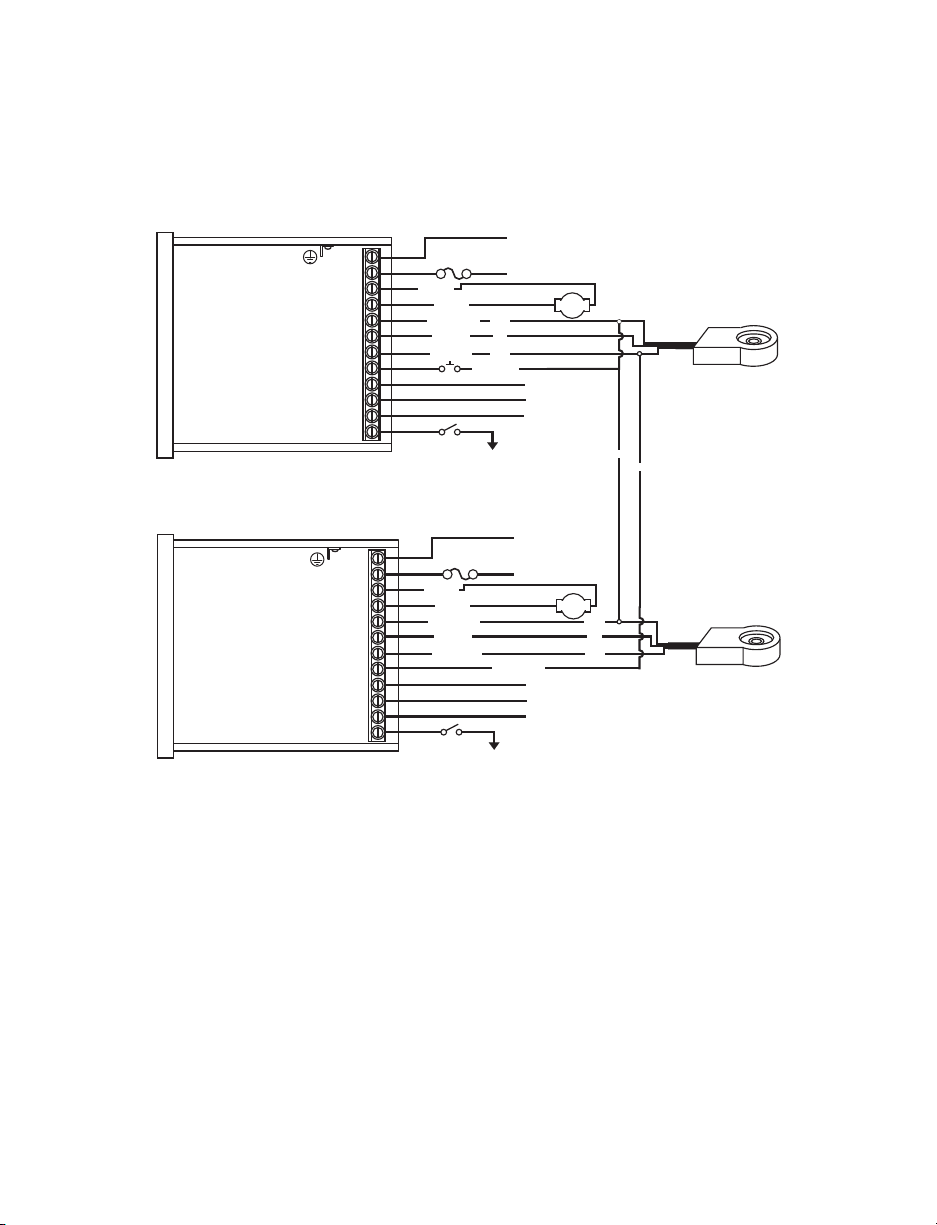
Electrical Installation & Diagrams
P1 Terminal Block Hook-Up Diagrams
**
Jog Input
User Input 1
COM (P1-5)
black
white
red
AC INPUT
AC INPUT
}
85-265VAC
}
MOTOR
Form C
Relay Output
(Programmable)
PICK-UP MOUNTED
TO MOTOR SHAFT
(Mounts on rotating
end shaft with 10-32
tapped hole, 1/2" deep)
black
white
MDP
MASTER
FUSE
N
P1-1
P1-2
P1-3
P1-4
P1-5
P1-6
P1-7
P1-8
P1-9
P1-10
P1-11
P1-12
* For AC inputs utilizing two hot lines, both inputs should be
protected with appropriately sized fuses or circuit breakers.
** P1-8 & P1-12 user input may be programmed
for a number of functions. Including (jog, inhibit, etc.)
MD10P = 7.5 Amp*
MD3P = 15 Amp*
L
-A
-ARM
+A
+ARM
COM
COMMON
+5V
+5VDC
S1
SIGNAL
S2
Alarm Output - Normally Open
NO
Alarm Output - Common
C
Alarm Output - Normally Closed
NC
IN1
**INHIBIT
MDP
FOLLOWER
User Input 1
COM (P1-5)
AC INPUT
AC INPUT
SIGNAL 2
Form C
Relay Output
(Programmable)
}
FUSE
N
P1-1
P1-2
P1-3
P1-4
P1-5
P1-6
P1-7
P1-8
P1-9
P1-10
P1-11
P1-12
* For AC inputs utilizing two hot lines, both inputs should be
protected with appropriately sized fuses or circuit breakers.
** P1-8 & P1-12 user input may be programmed
for a number of functions. Including (jog, inhibit, etc.)
MD10P = 7.5 Amp*
MD3P = 15 Amp*
L
-A
-ARM
+A
+ARM
COM
COMMON
+5V
+5VDC
S1
SIGNAL 1
S2
Alarm Output - Normally Open
NO
Alarm Output - Common
C
Alarm Output - Normally Closed
NC
IN1
**
INHIBIT
}
MOTOR
85-265VAC
black
red
white
FOLLOWER PICK-UP
MOUNTED TO
MOTOR SHAFT
(Mounts on rotating
end shaft with 10-32
tapped hole, 1/2" deep)
8
Page 11

N
P1-10
P1-11
P1-12
P1-1
L
P1-2
-A
P1-3
P1-4
P1-5
P1-6
P1-7
P1-8
P1-9
-ARM
+A
+ARM
COM
COMMON
+5V
+5VDC
S1
SIGNAL
S2
NO
C
NC
IN1
Ground Lug
*
Jog Input
AC INPUT
85-265VAC
AC INPUT
}
MOTOR
black
red
white
Alarm Output - Normally Open
Alarm Output - Common
Alarm Output - Normally Closed
User Input 1
*INHIBIT
COM (P1-5)
Form C
Relay Output
(Programmable)
}
PICK-UP MOUNTED
TO MOTOR SHAFT
(Mounts on rotating
end shaft with 10-32
tapped hole, 1/2" deep)
MD3E
* P1-8 & P1-12 user input may be programmed
for a number of functions. Including (jog, inhibit, etc.)
P1 Terminal Block Descriptions
P1-1 (AC / N) – For single phase AC lines connect the Neutral side of your AC line to this terminal.
For systems with two hot AC lines, connect either of the Hot AC lines to this terminal.
P1-2 (AC / L) – For single phase AC lines connect the Hot side of your AC line to this terminal. For
systems with two hot AC lines, connect either of the Hot AC lines to this terminal.
P1-3 (-A) - This is the -Armature terminal. For normal rotation of your motor you should connect
the -Armature lead of your motor to this terminal. The +Armature lead of your motor will be
connected here when a reverse directional rotation of the armature is desired.
P1-4 (+A) - This is the +Armature terminal. For normal rotation of your motor you should connect
the +Armature lead of your motor to this terminal. The -Armature lead of your motor will be
connected here when a reverse directional rotation of the armature is desired.
P1-5 (COM) – This is the common point for the control logic. The speed sensor common lead as
well as any other source needing to reference the control common will be connected to this
terminal.
P1-6 (+5V) – This is a self-contained +5VDC power supply capable of up to 50mA. The speed sensor
supply lead can be connected to this terminal for its power source.
P1-7 (S1) – This is the signal input terminal for the motor's digital pickup or encoder.
P1-8 (S2) – This input can be programmed to perform a number of advanced functions. In Follower
Mode, this input is the signal input terminal for the master's digital pickup or encoder. In Master
modes (Rate and Time), this input can be confi gured to function as an emergency stop, inhibit,
or jog command.
P1-9 (NO) – This is the normally-open contact of the user assignable relay output.
P1-10 (C) – This is the common contact of the user assignable relay.
P1-11 (NC) – This is the normally-closed contact of the user assignable relay output.
P1-12 (IN1) – This input can be programmed to perform a number of advanced functions. It can be
confi gured to function as an emergency stop, inhibit, or jog command.
9
Page 12

-1 Option Wiring
The -1 option board is a module which allows external up and down push buttons to be wired to the
unit. These buttons operate exactly like the Up and Down buttons on the user interface. This module
is commonly used to allow PLCs or hand-held pendants to operate the front-panel remotely. Wire for
the external buttons are attached via a 3mm European terminal block on the -1 option board. The
buttons are activated by shorting the terminal labeled Com to either the Up or Down terminal.
REMOTE SWITCHING
MICROPROCESSOR
DOWN UP
SERIES PC BOARD
-1 OPTION
BOARD
-3
-1
-2
COMMON
DOWN
UP
Basic Operating Instructions
Control Algorithm Discussion
The MDP series controls are based on a pulse-accumulation algorithm. The advantage to this type of
algorithm is that it allows the control to follow a master process with exceptional long-term accuracy.
The MD10P and MD3P controls have three parameters which allow the user to adjust how aggressively
the units drive the motor to achieve the target speed. These 3 parameters are as follows:
P Gain - This is the proportional gain for the control loop. In pure pulse-accumulation algorithms, there
is no loop error to base a 'P' factor on; therefore, these units must estimate error based on several
control loop factors. Those who are familiar with PID control tuning should be aware that the MD10P
and MD3P control's P Gain is somewhat different than that of standard velocity-form PID algorithms.
The P Gain is a function of instantaneous error, a measure of the difference between the target (desired)
speed and the current speed of the motor.
I Gain -This is the integral gain for the control loop. The I Gain is a function of accumulated error, a
measure of the difference between the target (desired) speed and the current speed of the motor.
Pulse Accumulation Limit - This parameter allows the user to limit the maximum number of pulses
the drive will accumulate prior to intentionally losing count and therefore long-term accuracy. See the
details for parameter 29 in the Parameter Description section.
Pulse-Accumulation Loop PI Tuning
Many applications do not require tuning of the P and I Gain parameters beyond the supplied factory
default settings. If more responsiveness is desired or if the motor oscillates an unacceptable amount when
changing speeds, it may be necessary to adjust the P and I gains to obtain optimal performance.
Increasing the P and/or I gains will cause the control to drive the motor more aggressively. Decreasing
the P and/or I gains will cause the control to perform more sluggishly. Properly tuning the P and I
gains encompasses more than independently adjusting the P and I. The ratio between the two is
very important as well. Although initial tuning can be a time-consuming task, here is a basic outline
of how to proceed:
10
Page 13

Test Procedure: Adjust the target (displayed) speed as expected during normal operation, including
testing inhibit and jog transitions if applicable.
Tuning Method:
Step 1 - Connect control to loaded motor with application's anticipated load for realistic
tuning
Step 2 - Perform test procedure
Step 3 - If control performs adequately, stop tuning and record settings
Step 4 - If control is too sluggish or takes too long to reach the target speed, then try
increasing I Gain slightly (add 250). Perform the test procedure again. Continue
increasing I Gain until motor starts to slightly oscillate or become unstable. At this
point, decrease the I Gain by 250.
Step 5 - If control is too aggressive or is causing the motor to oscillate or become unstable,
then try decreasing I Gain slightly (subtract 250). Perform the test procedure again.
Continue decreasing I Gain until motor starts to stabilize and regulate more accurately.
Step 6 - Once I is set, adjust P Gain and perform test procedure. In this control, additional P
Gain may or may not improve response or stability. Experimentation will be required.
Accel and decel settings have a small impact on PI tuning as well. Specifi cally, when accel and decel
settings are extremely fast, they can cause the control loop to perform more sluggishly. Another thing
to keep in mind is that PI tuning also affects accel and decel times. For instance, a sluggishly tuned PI
control loop may take longer than the programmed accel and decel times to reach the target; whereas,
an aggressively tuned PI control loop will reach the target faster.
Master (Rate and Time) and Follower (Ratio) Modes Explained
The MDP controls have two basic modes of operation, master and follower. In the Master modes, the
controls are capable of operating independently; whereas, in the Follower Mode, the control requires a
signal from a master to operate. The Follower Mode is used in applications which require the MDP to
closely follow a master process. For example, if a factory has ten conveyors which must be synchronized
over long periods of time, an industrial engineer could use one MDP as a master control for the fi rst
conveyor and nine MDPs as slaves or followers which would receive their speed commands from the
fi rst conveyor's master control or pickup.
In Master Rate Mode, the MDP controls the rate of the motor by tracking the motor's pickup pulses
which are applied to signal input 1 (S1). In this mode, the display indicates in rate units such as
Gallons-per-minute, feet-per-second, and RPM.
In Master Time Mode, the MDP controls the process time by tracking the motor's pickup pulses which
are applied to signal input 1 (S1). In this mode, the display indicates in time units such as HH:MM or
MM:SS, where HH is hours, MM is minutes, and SS is seconds. This mode is most-commonly used
in time-sensitive processes such as conveyor ovens and plating applications.
In Follower Mode, the MDP tracks the number of pulses which are applied to the master signal input
(S2). From these pulses, it calculates the rate of the master process. This rate is then multiplied by
the percentage which is displayed on the user interface. The display is in 0.1% of master units. For
example, 675 = 67.5 percent of master speed. A master running at 1350 RPM, would cause the
follower to run its motor at 67.5% * 1350 RPM or 911.25 RPM. Typical follower applications include
synchronized rotation, synchronized conveyors, and some web-material processes.
11
Page 14

Visual Reference
CONTROLS
Ite
Tach
ValuPage
m
ENTER
ENTER (Select) Button
ENTER (Select) Button
Item
ValuPage
Tach
ENTER
MICRO-DRIVE
Display Window
ENTER
MICRO-DRIVE
Display Window
CONTROLS
Up & Down Buttons
ENTER (Select) Button
Up & Down Buttons
Display Window
CONTROLS
Up & Down Buttons
How to Change a Parameter's Value (The Short Story)
1. Hold down the Enter button until Parameter-Selection Mode is entered
2. Using the Up and Down buttons, select the desired parameter number to view or edit
3. Press the Enter button to change the value of the parameter
4. Using the Up and Down buttons, change the parameter's value as desired
5. Press the Enter button to permanently save the changes (Return to Parameter-Selection Mode)
6. Select parameter zero and press the Enter button to return to Running Mode
Operating the User Interface (The Long Story)
Although the MDP user interface is very versatile, it is also simple to setup and operate. With just
a few button presses, it allows the user to confi gure a number of adjustable parameters. The LED
display has three basic operating modes: Running Mode, Parameter-Selection Mode, and Value Mode.
Each of the three modes have specifi c visual indicators that allow the user to immediately determine
the current state or mode of the user interface. Parameter-Selection Mode and Value Mode can
only be entered if the Program Enable jumper is in the “On” position.
Running Mode is the default display of the unit when power is applied. The MDP will spend the majority
of its time in this mode. In Running Mode, the display shows the target value in the appropriate userdefi ned format of rate, time, or percentage. The control will continuously attempt to drive the motor at
the requested target rate. In this display mode, the Up and Down buttons increase or decrease the
displayed target value until either the display minimum or display maximum limit is reached. Depending
on the alarm confi guration, these buttons may also serve as an alarm-silence or alarm-reset button.
Example displays for rate, time, and follower operating modes are 13.60, 45:30, and 1000.
12
Page 15

Parameter-Selection Mode can be entered by simply pressing and holding the Enter button down for
three seconds. Once in Parameter-Selection Mode, the far left of the display will be a ‘P’. The right side
of the display will indicate the currently selected parameter number for editing purposes. Pressing the
Up or Down button will increase or decrease the selected parameter number on the display. Although
the parameter numbers are in numerical order, some numbers are skipped. These numbers represent
reserved parameters that are not yet implemented and are not displayed. Once the desired parameter
number is displayed, a press of the Enter button will change the display to the Value Mode. When
in Parameter-Selection Mode, pressing the Enter button with parameter 0 selected will cause
the unit to return to Running Mode. Example displays for Parameter-Selection Mode are P 1, P
13, and P 54. See the Software Parameters for a list of available parameters.
Value Mode is used to modify the value of the selected parameter. When in Value Mode, the two
dots which form the colon, between digits two and three, will alternately fl ash (one, then the other) to
inform the user that a parameter’s value is being edited. Pressing the Up or Down button increases or
decreases the selected parameter’s value. See the Software Parameters for a list of allowable values
and ranges. Value changes take effect immediately. For example, when scrolling through the alarm
output conditions, the relay will activate as the always-active selection is passed. Once the desired
value is showing in the display window, pressing the Enter button again will return to ParameterSelection Mode. The new value is not saved in permanent memory until the Enter button is pressed.
Removing power from the unit while in Value Mode may result in the specifi ed new value being lost.
Detailed Confi guration Instructions
Default Confi guration
When shipped from the factory, the following basic settings are in place:
Rate Mode Operation in RPM
S1 and S2 Signal Input Pulses per Revolution: 1
Decimal Point Display: Off
Display Range: 0 - 2400
Speed Range: 0 - 2400 RPM
Accel and Decel: 2500 RPM per second
Signal Input 2 (S2) Mode: Jog @ 1000 RPM when Low
User Input 1 (UIN1) Mode: Emergency Stop when Low
Alarm Output: Disabled
Resetting the Unit to Factory Defaults
The factory-default settings can be easily restored using either of two methods. Both methods require
the Program Enable jumper to be in the “On” position. The fi rst is to apply power to the unit with both
the Enter and Down buttons pressed for 3 seconds. The second is to change the value of parameter
95 to 5.
JP1 (Program Enable Jumper)
The JP1 jumper is located under the dust cover on the back end of the upper board. When the jumper
is set to the "Off" position, all programming features are locked out to the front panel user. When the
jumper is in the "On" position, the programming parameters are open to change. JP1 is shipped from
the factory set in the "On" position.
13
Page 16

Software Parameters
Parameter Description
0 Selecting this item exits to Running Mode n/a n/a
Read-Only Parameters
1 Model Number 10 – MD10P Unit
11 – MD3P Unit
13 – MD3E Unit
2 Software Build 1 – 9999 n/a
3 Hardware Version 1 – 9999 n/a
4 Serial Number – Major (reserved) n/a n/a
5 Serial Number – Minor (reserved) n/a n/a
General Setup
10 Operating Mode 1 – Rate Mode
2 – Time Mode
3 – Follower Mode
11 Display Intensity 0 – 31 (Dim – Bright) 20
13 Decimal Point Position 0 – DP Disabled (XXXX)
1 – X.XXX
2 – XX.XX
3 – XXX.X
4 – XXXX.
14 Keypad Mode 1 – Linear, Constant Rate
2 – Non-linear, Accelerating Rate
15 Keypad Scroll Delay 0 – 30 (Fast – Slow) 10
16 S1 / S2 Input Edge & Prescaler Configuration 0 – S1 is Rising/1 S2 is Rising/1
1 – S1 is Falling/1 S2 is Rising/1
2 – S1 is Falling/4 S2 is Rising/1
3 – S1 is Falling/16 S2 is Rising/1
4 – S1 is Rising/1 S2 is Falling/1
5 – S1 is Falling/1 S2 is Falling/1
6 – S1 is Falling/4 S2 is Falling/1
7 – S1 is Falling/16 S2 is Falling/1
8 – S1 is Rising/1 S2 is Falling/4
9 – S1 is Falling/1 S2 is Falling/4
10 – S1 is Falling/4 S2 is Falling/4
11 – S1 is Falling/16 S2 is Falling/4
12 – S1 is Rising/1 S2 is Falling/16
13 – S1 is Falling/1 S2 is Falling/16
14 – S1 is Falling/4 S2 is Falling/16
15 – S1 is Falling/16 S2 is Falling/16
18 Power-up Mode 1 – Default to Zero Display
2 – Default to Power-up Value
3 – Default to Previous Running Val.
19 Power-up Value 0 – 9999 (Display Units) 0
Display & Control Loop Setup
20 Display Minimum 0 – 9998 (Display Units) 0
21 Display Maximum 1 – 9999 (Display Units) 2400
23 Accel Setting 1 – 9999 (Display Units) 2500
24 Decel Setting 1 – 9999 (Display Units) 2500
26 Proportional Gain 0 – 9999 (Not Unit-specific) 0
27 Integral Gain 1 – 9999 (Not Unit-specific) 5000
29 Pulse Accumulation Limit 2 – 5000 (Not Unit-specific) 15
Value Range
(units)
Factory
Default
10, 11, or
13
1
0
2
0
3
User
Settings
30 S1 Display Reference 0 – 9999 (Display Units) 2400
31 S1 Reference RPM 0 – 9999 (RPM) 2400
32 S1 Pulses per Revolution 1 – 2048 (PPR) 1
33 S1 Deadband (Follower Mode Only) 0 – 1000 (Seconds) 0
Signal Input #1 (S1) Setup
14
Page 17

Software Parameters, cont'd
Parameter
Signal Input #2 (S2) Setup
35 S2 Input Configuration 1 – Disabled (Follower Mode)
36 S2 Setpoint 1 – 9999 (Display Units) 1000
37 S2 Pulses per Revolution 1 – 2048 (PPR) 1
38 Front Panel Dou bleClick Mode 0 – Hardware Inhibit
User Input #1 (UIN1) Setup
40 UIN1 Input Configuration 1 – Disabled
41 UIN1 Setpoint for Jog 1 – 9999 (Display Units) 1000
Alarm Output #1 Configuration
50 Alarm Activation Conditions 0 – Always Off
51 Output Style & Reset Mode 1 – Constant & Auto Reset
52 Reset Configuration 1 – No Sil., Reset on Key
53 Display Flash On Active Alarm 0 – Alarm Flash Disabled
54 Pulse on Time 1 – 3600 (seconds) 1
55 Pulse off Time 1 – 3600 (seconds) 1
56 Pulse Count 0 – 9999 (pulses) 0
57 Lower Limit 0 – 9999 (display units) 0
58 Upper Limit 0 – 9999 (display units) 9999
Parameter Memory Commands
95 Restore Settings to Factory
Default
98 Save to User Def ault Area 0 – Do Nothing & Exit
99 Restore from User Default Area 0 – Do Nothing & Exit
Description
Value Range
(units)
2 – E-Stop When S2 High
3 – E-Stop When S2 Low
4 – Inhibit When S2 High
5 – Inhibit When S2 Low
6 – Jog When S2 High
7 – Jog When S2 Low
1 – DoubleClick Toggles Inhibit
2 – E-Stop When UIN1 High
3 – E-Stop When UIN1 Low
4 – Inhibit When UIN1 High
5 – Inhibit When UIN1 Low
6 – Jog When UIN1 High
7 – Jog When UIN1 Low
1 – Always On
2 – Active when Above upper limit
3 – Active when Below lower limit
4 – Active inside Range
5 – Active outside Range
6 – Active when Target = 0
7 – Active when no Pickup Pulses
detected
8 – Active when at Max. Conduction
2 – Constant & Manual Reset
3 – Pulsed & Auto Reset
4 – Pulsed & Manual Reset
2 – No Sil., Reset on S2 High
3 – No Sil., Reset on S2 Low
4 – Sil., Reset on Key
5 – Sil., Reset on S2 High
6 – Sil., Reset on S2 Low
1 – Alarm Flash Enabled
0 – Do Nothing & Exit
5 – Restore Factory Defaults
5 – Save Setting
1 – Restore Settings
Factory
Default
7
0
3
0
1
1
0
0
0
0
User
Settings
15
Page 18

Parameter Descriptions
Parameter 0 – Exit to Running Mode
When parameter 0 is selected in Parameter-Selection Mode, the unit will return to Running
Mode and display the running value. This should be selected once changes to parameters are
completed.
Parameter 1 – Model Number (Read Only)
This is a number which represents the base model number for the product. The model codes
for the MD10P ,MD3P, and MD3E are 10 ,11, and 13 respectively.
Parameter 2 – Software Build (Read Only)
The software build is a code which identifi es the software version of the unit.
Parameter 3 – Hardware Version (Read Only)
The hardware version is a code which identifi es which hardware was used to build the unit.
Parameter 4 & 5 – Serial Number, Major & Minor (Read Only)
These parameters are reserved for future use as an electronic serial number and are unique
to each manufactured unit.
Parameter 10 – Operating Mode
This parameter defi nes the operating mode for the entire unit. There are two basic modes of
operation, master and follower. In master modes, the unit controls the load using either rate
or time units. In follower mode, the unit controls the load in percentage of master rate. The
following modes are available for the MDP:
Mode 1 – Master, Rate Mode
In Rate Mode, the MDP displays in user-defi ned rate units such as RPM, Gallons per
Hour, or Feet per Second. See applications for examples.
Mode 2 – Master, Time Mode
In Time Mode, the MDP displays in time units using the format AA:BB. By default AA:BB
represents minutes (AA) and seconds (BB). Optionally, it can be confi gured to represent
hours (AA) and minutes (BB) or other user-defi ned units with a 1:60 relationship. When
setting parameters which are confi gured in display units, the programmed value is the
determined by the formula (AA * 60) + BB. In HH:MM displays, this is the total number
of minutes. In MM:SS displays, this is the total number of seconds. See applications
for examples.
Mode 3 – Follower Mode
In Follower Mode, the MDP displays in percentage units, where 1000 equals 100.0 percent
of the master rate. For example, if the display indicates 985, 98.5, or 9.85, the MDP will
attempt to run at exactly 98.5 percent of the master rate. Display settings are always
Parameter 11 – Display Intensity
Parameter 13 – Decimal Point (DP) Position
entered ignoring the decimal point's position. See applications for more examples.
This parameter adjusts the intensity of the LED display digits in the front panel of the unit. The
values of 0 – 31 correspond to a gradual change from very dim to very bright. This is often useful
when the MDP is used in the same panel as other pieces of equipment with LED displays and
a uniform display brightness is desired. Simply adjust the MDP to match its surroundings.
This selects the format of the display with respect to the decimal point’s position. This parameter
does not effect the value entry for other parameters. For example, if the user desires to display
10.00 at 300RPM, then parameter 30 would be set to 1000, parameter 31 would be set to 300,
and parameter 13 would be set to 2.
Mode 0: Fixed XXXX
Mode 1: Fixed X.XXX
Mode 2: Fixed XX.XX
Mode 3: Fixed XXX.X
Mode 4: Fixed XXXX.
16
Page 19

Parameter 14 – Keypad Mode
This parameter selects the operating mode of the front-panel push buttons. In some
applications, increasing or decreasing the scroll rate provides the user more controllability
when entering settings. Parameters 14 and 15 affect only the Up and Down buttons when
the user interface is in Running Mode. These settings also apply to remote Up / Down
buttons which are attached via the -1 option board.
Mode 1: Linear, Constant Rate
In linear mode, pressing and holding the Up or Down buttons will cause the display to
continuously change value in the requested direction until either the Display Minimum
or Display Maximum is reached. The displayed value will scroll at a constant rate which
is specifi ed using parameter 15.
Mode 2: Non-linear, Accelerating Rate
In non-linear mode, pressing and holding the Up or Down buttons will cause the
display to continuously change value in the requested direction until either the Display
Minimum or Display Maximum is reached. The displayed value will initially scroll at a
slow rate and increase in speed until the maximum scroll rate is achieved. The initial
Parameter 15 – Keypad Scroll Mode
Parameter 16 – S1 / S2 Input Edge & Prescaler Confi guration
scroll rate is specifi ed using parameter 15.
This parameter sets the scroll speed for the front-panel push buttons. The function of this
parameter varies slightly depending on the Keypad Mode. See parameter 14 for more
details.
This parameter determines how the MDP processes the S1 and S2 signal inputs. It specifi es
which signal edge is used for measurements and the value of the internal frequency dividers
or prescalers. Modes with prescalers greater than 1 should only be used if the input pulse
rate on S1 or S2 exceeds the unit's maximum native pulse rate (see specifi cations for details);
otherwise, the control loop may become sluggish and unnecessarily inaccurate. Use the
following chart to confi gure this parameter. As an example, assume an application requires
input pulse rates on S1 of 120,000 pulses-per-minute and S2 of 35,000 pulses-per-minute.
According to the electrical specifi cations, the unit can only accept 50,000 pulses-per-minute
on each the S1 and S2 inputs. With this in mind, the S1 and S2 prescalers should be selected
as Falling / 4 and Rising / 1, respectively. In this case, parameter 16 would be set to 2.
Parameter 18 – Power-up Mode
This parameter defi nes the mode which determines the default Running Value when power
is initially applied to the MDP.
Mode 1: Default to Zero
When in this mode, the unit will default to zero (display units).
Mode 2: Default to Power-Up Value
When in this mode, the unit will default to the Power-up Value, parameter 19.
Mode 3: Default to Previously Running Value
When in this mode, the unit will default to the previous running value before power
was removed. A previous running value must have been active for at least 3 seconds
to be recalled after power has been disconnected and reapplied.
17
Page 20

Parameter 19 – Power-up Value
When Power-up Mode is set to 2, this parameter will designate the default display value at
power-up in display units.
Parameter 20 – Display Minimum
This parameter defi nes the lower end of the display range. This is the value which limits how
low the user is able to scroll the displayed value in Running Mode. In Rate and Time modes,
this value is set in display units. In Follower Mode, this is set in percentage of the master rate.
For example, in Follower Mode, 1250 represents 125.0 percent of the master rate.
Parameter 21 – Display Maximum
This parameter defi nes the upper end of the display range. This is the value which limits how
high the user is able to scroll the displayed value in Running Mode. In Rate and Time modes,
this value is set in display units. In Follower Mode, this is set in percentage of the master rate.
For example, in Follower Mode, 150 represents 15.0 percent of the master rate.
Parameter 23 – Acceleration Setting
This parameter determines how fast the MDP will accelerate toward the displayed target setting.
This parameter is set in display units of change per second such as RPM, GPM, or feet per
second. In Follower Mode, this parameter is set in RPM units.
Parameter 24 – Deceleration Setting
This parameter determines how fast the MDP will decelerate toward the displayed target setting.
This parameter is set in display units of change per second such as RPM, GPM, or feet per
second. In Follower Mode, this parameter is set in RPM units.
Parameter 26 – Proportional (P) Gain
The Proportional Gain is the fi rst of two parameters which defi ne the responsiveness of the
control with respect to how fast it responds to changing loads. Because the MDP controls
are pulse-accumulation drives, the P Gain responds differently than the same parameter in a
standard velocity-form PID control. The higher the P Gain, the more aggressively the unit will
drive the load. See the PI Control Tuning section of the manual for more details.
Parameter 27 – Integral (I) Gain
The Integral Gain is the second of two parameters which defi ne the responsiveness of the
control with respect to how fast it responds to changing loads. The higher the I Gain, the more
aggressively the unit will drive the load. When using high PPR pickups or encoders, it will be
necessary to decrease the I Gain to prevent unwanted oscillation and instabilities. See the PI
Control Tuning section of the manual for more details.
Parameter 29 – Pulse Accumulation Limit
This parameter sets the limit for the maximum number of pulses the drive will accumulate prior
to intentionally losing count and therefore long-term accuracy. Because the MDP controls are
pulse-accumulation drives, they are able to accurately track a master (in Follower Mode) pulseby-pulse. That is, they are able to run for days, weeks, or months and remain completely in
sync with a master drive or process; unfortunately, this functionality comes at a small cost.
By default, if the main pickup signal were lost and then reattached, the unit may run at high
speeds for many seconds while attempting to make-up what would have been lost pulses.
Once it catches up, it returns to normal operation. In some applications, this is a nuisance. In
these cases, the Pulse Accumulation Limit, parameter 29, can be lowered to limit the maximum
number of pulses the drive will remember.
This parameter is set from 0 to 9999, where 0 is no accumulation and 9999 is maximum
accumulation. As this value approaches zero, the unit will gradually lose its ability to drive the
motor and eventually stop the motor completely. It may be necessary to increase the value of
this parameter for application which demand higher long-term accuracy.
18
Page 21

Parameter 30 – Signal Input 1 (S1) Display Reference
This is the number to be displayed when at the user-specifi ed motor Reference RPM. In Rate
Mode, this value represents rate units such as feet, ounces, or revolutions. In Time Mode, this
value represents the reference time measured in seconds or minutes. If the desired display
is HH:MM, then all values should be entered in minutes. If MM:SS is desired, then all values
should be entered in seconds. In Follower Mode, this value is the percentage of the master rate
in 0.1% units. For example, 1000 equates to 100%. See applications for more examples.
Parameter 31 – Signal Input 1 (S1) Reference RPM
This is the reference RPM at which the Display Reference value should be displayed. In Rate
and Time Modes, this value represents the RPM of the encoder to which the Display Reference
corresponds. In Follower Modes, this value is not used. See applications for examples.
Parameter 32 – Signal Input 1 (S1) Pulses per Revolution
This is the number of pulses per revolution for the signal input 1 (S1). The MDP supports pickups
and encoders from 1 to 2048 pulses per revolution.
Parameter 33 – Signal Input 1 (S1) Deadband (Follower Mode Only)
When in Follower Mode, it is often desirable for the follower unit to continue to slowly makeup the small pickup pulse differential between the master and follower's position. In some
applications, it is not necessary for the follower to continue to slowly seek the master's exact
pulse position when the master rate is at zero. In these cases, the Deadband parameter can
be set above zero to force the MDP to stop driving the motor slowly and cause it to inhibit until
the master starts rotating again. At that point, the follower will automatically make-up the pulse
differential as it starts to rotate. The deadband is disabled by setting it to zero seconds.
Parameter 35 – Signal Input 2 (S2) Input Confi guration
This parameter determines the operating mode of signal input 2 (S2).
Mode 1: Disabled (Follower Mode)
The S2 input is inactive. This is the required setting for Follower Mode.
Mode 2: Emergency Stop When S2 High (Not Wired To Common)
When the S2 input is at an electrically high (+5V) state or allowed to fl oat disconnected,
the MDP will enter emergency-stop mode. While in this mode, the armature output will
immediately be turned off. Once the S2 input returns to an electrically low state or wired
to the unit's common, the output will become active.
Mode 3: Emergency Stop When S2 Low (Wired To Common)
When the S2 input is at an electrically low state or wired to the unit's common, the MDP
will enter emergency-stop mode. While in this mode, the armature output will immediately
be turned off. Once the S2 input returns to an electrically high (+5V) state or allowed to
fl oat disconnected, the output will become active.
Mode 4: Inhibit When S2 High (Not Wired To Common)
When the S2 input is at an electrically high (+5V) state or allowed to fl oat disconnected,
the MDP will enter inhibit mode. While inhibited, the armature output will decrease
according to the decel setting until zero output is reached. Once the S2 input returns to
an electrically low state or is wired to the unit's common, the output will start to accelerate
toward the previous running value.
Mode 5: Inhibit When S2 Low (Wired To Common)
When the S2 input is at an electrically low state or wired to the unit's common, the MDP
will enter inhibit mode. While inhibited, the armature output will decrease according to
the decel setting until zero output is reached. Once the S2 input returns to an electrically
high (+5V) state or allowed to fl oat disconnected, the output will start to accelerate toward
the previous running value.
19
Page 22

Mode 6: Jog When S2 High (Not Wired To Common)
When the S2 input is at an electrically high (+5V) state or allowed to fl oat disconnected,
the MDP will enter jog mode. While in jog mode, the display will immediately change to
the programmed jog setpoint, parameter 36. The unit will start accelerating or decelerating
toward the jog setting at the confi gured accel and decel rates. Once the S2 input returns to
an electrically low state or is wired to the unit's common, the output will start to accelerate
or decelerate toward the previous running value. In Follower Mode, the unit will operate
as its own master. This allows an application to jog by overriding a stopped master.
Mode 7: Jog When S2 Low (Wired To Common)
When the S2 input is at an electrically low state or wired to the unit's common, the
MDP will enter jog mode. While in jog mode, the display will immediately change to the
programmed jog setpoint, parameter 36. The unit will start accelerating or decelerating
toward the jog setting at the confi gured accel and decel rates. Once the S2 input returns
to an electrically high (+5V) state or allowed to fl oat disconnected, the output will start to
accelerate or decelerate toward the previous running value. In Follower Mode, the unit
will operate as its own master. This allows an application to jog by overriding a stopped
Parameter 36 – Signal Input 2 (S2) Setpoint
Parameter 37 – Signal Input 2 (S2) Pulses per Revolution
Parameter 38 - Front Panel DoubleClick Mode
Parameter 40 – User Input 1 (UIN1) Confi guration
master.
When the S2 confi guration, parameter 35, is set to one of the jog modes, this parameter defi nes
the jog setpoint in display units. If the MDP operating mode is set to Follower Mode, then this
parameter is set in RPM units. This allows a follower control to be jogged when the master is
stopped.
This is the number of pulses per revolution for the signal input 2 (S2). The MDP supports pickups
and encoders from 1 to 2048 pulses per revolution.
When set to a value of 1, the setting of Parameter 35 and/or Parameter 40, particularly Modes
4 and 5 (Inhibit), have no effect; instead, "clicking" the ENTER Button twice in rapid succession
("Double-Clicking") will TOGGLE the MD10P/3P in and out of "Inhibit" mode. When in DoubleClick
mode, the Motor will decelerate to a stop, and the Display will show 4 dashes
"----" DoubleClicking again will cause the motor to accelerate up to the Target speed/time, and
the Display to return to its normal condition. When set to a value of Zero, the Inhibit function
is controlled exclusively by the signal level on the S2 and/or UIN1 Input(s), and the setting of
Parameters 35 and/or 40, and the "DoubleClick" function will have no effect. Note also that
the DoubleClick Inhibit is only honored in "Run" mode.
This parameter determines the operating mode of user input 1 (UIN1).
Mode 1: Disabled
The UIN1 input is inactive.
Mode 2: Emergency Stop When UIN1 High (Not Wired To Common)
When the UIN1 input is at an electrically high (+5V) state or allowed to fl oat disconnected,
the MDP will enter emergency-stop mode. While in this mode, the armature output will
immediately be turned off. Once the UIN1 input returns to an electrically low state or
wired to the unit's common, the output will become active.
Mode 3: Emergency Stop When UIN1 Low (Wired To Common)
When the UIN1 input is at an electrically low state or wired to the unit's common, the MDP
will enter emergency-stop mode. While in this mode, the armature output will immediately
be turned off. Once the UIN1 input returns to an electrically high (+5V) state or allowed
to fl oat disconnected, the output will become active.
20
Page 23

Mode 4: Inhibit When UIN1 High (Not Wired To Common)
When the UIN1 input is at an electrically high (+5V) state or allowed to fl oat disconnected,
the MDP will enter inhibit mode. While inhibited, the armature output will decrease
according to the decel setting until zero output is reached. Once the UIN1 input returns to
an electrically low state or is wired to the unit's common, the output will start to accelerate
toward the previous running value.
Mode 5: Inhibit When UIN1 Low (Wired To Common)
When the UIN1 input is at an electrically low state or wired to the unit's common, the MDP
will enter inhibit mode. While inhibited, the armature output will decrease according to the
decel setting until zero output is reached. Once the UIN1 input returns to an electrically
high (+5V) state or allowed to fl oat disconnected, the output will start to accelerate toward
the previous running value.
Mode 6: Jog When UIN1 High (Not Wired To Common)
When the UIN1 input is at an electrically high (+5V) state or allowed to fl oat disconnected,
the MDP will enter jog mode. While in jog mode, the display will immediately change to
the programmed jog setpoint, parameter 41. The unit will start accelerating or decelerating
toward the jog setting at the confi gured accel and decel rates. Once the UIN1 input
returns to an electrically low state or is wired to the unit's common, the output will star t
to accelerate or decelerate toward the previous running value. In Follower Mode, the unit
will operate as its own master. This allows an application to jog by overriding a stopped
master.
Mode 7: Jog When UIN1 Low (Wired To Common)
When the UIN1 input is at an electrically low state or wired to the unit's common, the
MDP will enter jog mode. While in jog mode, the display will immediately change to the
programmed jog setpoint, parameter 41. The unit will start accelerating or decelerating
toward the jog setting at the confi gured accel and decel rates. Once the UIN1 input
returns to an electrically high (+5V) state or allowed to fl oat disconnected, the output will
start to accelerate or decelerate toward the previous running value. In Follower Mode,
the unit will operate as its own master. This allows an application to jog by overriding a
Parameter 41 – User Input 1 (UIN1) Setpoint
Parameter 50 – Alarm 1 Conditions
stopped master.
When the UIN1 confi guration, parameter 40, is set to one of the jog modes, this parameter
defi nes the jog setpoint in display units. If the MDP operating mode is set to Follower Mode,
then this parameter is set in RPM units. This allows a follower control to be jogged when the
master is stopped.
This defi nes which conditions will result in the alarm 1 output being activated.
Mode 0: Always Inactive
The alarm output will remain in an inactive state. In this state, the NC and C contacts
will be internally electrically connected.
Mode 1: Always Active (When Power Is Applied)
The alarm output will become active when the power is applied to the unit. In this state,
the NO and C contacts will be internally electrically connected.
Mode 2: Active When Display Value Above Limit
The alarm output will activate when the displayed value is above the upper limit setting,
parameter 58.
Mode 3: Active When Display Value Below Limit
The alarm output will activate when the displayed value is below the lower limit setting,
parameter 57.
Mode 4: Active When Display Value Inside Range
The alarm output will activate when the displayed value is greater than or equal to lower
limit settings and less than or equal to the upper limit setting.
21
Page 24

Mode 5: Active When Display Value Outside Range
The alarm output will activate when the displayed value is less than the lower limit setting
or greater than upper limit setting.
Mode 6: Active When Target (Display) = Zero
The alarm output will activate when the displayed value is equal to zero. This allows the
alarm output to be used to drive a mechanical brake to decrease stopping time or to
provide holding torque at zero speed.
Mode 7: Active When Main Pickup Signal (S1) Stalled or stopped
The alarm output will activate when the main pickup signal input (S1) has stalled or
stopped. The alarm lower limit (Parameter 57) is used to specify the stall timeout, in
seconds, under a motor stall condition. When using the lower limit to set the stall timeout,
an inhibit command or zero speed command will not be recognized as a stall condition.
The pickup is considered to have stalled if the timeout passes with no pickup pulses when
the target (displayed) value is greater than zero and the control has not been given an
inhibit command. The alarm upper limit (Parameter 58) is used to specify a zero speed or
stopped timeout condition in seconds. When using the upper limit to set a zero speed or
stopped timeout, an inhibit command, a zero speed command or a motor stall condition
will all be recognized as a stopped condition. The pickup is considered to have stopped
after the timeout passes with no pickup pulses.
Note: When using the upper limit to set a stopped timeout the lower limit should
be set to zero.
Mode 8: Active When Driving At Maximum Conduction Angle
The alarm output will activate when the control is driving the motor at the maximum
conduction angle. This can be used to determine if the control is running away due to a
Parameter 51 – Alarm 1 Output Style & Reset Confi guration
Parameter 52 – Alarm 1 Reset Confi guration
broken pickup signal wire when stall-detection is not desired.
This setting confi gures the output mode and reset method for the alarm output.
Mode 1: Constant & Auto Reset
In this mode, the alarm output will remain active until the alarm condition ceases to exist.
The alarm will automatically reset when the conditions return to normal.
Mode 2: Constant & Manual Reset
In this mode, the alarm output will remain active until the alarm is reset manually. See
parameter 52 for details.
Mode 3: Pulse & Auto Reset
In this mode, the alarm output will pulse on and off until the alarm condition ceases to
exist. The pulsed modes are commonly used for audible alarms where a constant output
would be considered distracting or awkward. The alarm will automatically reset when the
conditions return to normal.
Mode 4: Pulse & Manual Reset
In this mode, the alarm output will pulse on and off until the alarm is reset manually. See
parameter 52 for reset details. The pulsed modes are commonly used for audible alarms
where a constant output would be considered distracting or awkward.
This setting determines which actions will cause an active alarm to be silenced or reset.
Mode 1: No Silencing, Reset On Any Button Press
In this mode, an active alarm cannot be silenced. Once the alarm condition ceases to
exist, however, any user-interface button may be pressed to cause a manual reset.
Mode 2: No Silencing, Reset On S2 Input High (Not Wired To Common)
Similar to Mode 1. Once the alarm condition ceases to exist, setting the S2 input to a
high (+5V) state or allowing it to fl oat disconnected will cause a manual reset.
Mode 3: No Silencing, Reset On S2 Input Low (Wired To Common)
Similar to Mode 1. Once the alarm condition ceases to exist, setting the S2 input to a
low (COM) state or wiring it to common will cause a manual reset.
22
Page 25

Mode 4: Silencing Enabled, Reset On Any Button Press
When the conditions for an active alarm persist, pressing any user-interface button will
result in the alarm being silenced or deactivated, but not reset. A second attempt to reset
the alarm must be made after the condition cease to exist to clear the alarm.
Mode 5: Silencing Enabled, Reset On S2 Input High (Not Wired To Common)
Similar to Mode 4. Setting the S2 input to a high (+5V) state or allowing it to fl oat
disconnected will cause the alarm to be silenced or reset depending on the current state
of the alarm conditions.
Mode 6: Silencing Enabled, Reset On S2 Input Low (Wired To Common)
Similar to Mode 4. Setting the S2 input to a low (COM) state or wiring it to common
will cause the alarm to be silenced or reset depending on the current state of the alarm
Parameter 53 – Alarm 1 Display Flash On Alarm
Parameter 54 – Alarm 1 Pulse on Time
Parameter 55 – Alarm 1 Pulse off Time
Parameter 56 – Alarm 1 Pulse Count
Parameter 57 – Alarm 1 Lower Limit
Parameter 58 – Alarm 1 Upper Limit
Parameter 95 – Factory Default Command
Parameter 98 – Save to User Default Area Command
Parameter 99 – Restore from User Default Area Command
conditions.
This will cause the display to fl ash when an alarm condition is active.
This parameter defi nes the number of seconds the output should be enabled during the ‘on’
phase of an active pulsing alarm’s output.
This parameter defi nes the number of seconds the output should be disabled during the ‘off’
phase of an active pulsing alarm’s output.
This setting determines how many pulses are output when the alarm is activated and is confi gured
in pulse output style. When 0 is entered, the unit will be set for continuous pulses while the
alarm is active.
This setting defi nes either the lower limit, the lower end of a range for the alarm region or a stall
timeout. Alarm limits are set in display units without regard to decimal point or colon position.
In Rate and Follower Modes, a limit of 123 could represent a display value of 123, 12.3, 1.23, or
0.123. When in Time Mode, a limit of 123 would represent 1:23 on the display. When the lower
limit is being used to set a stall timeout for parameter 50 mode 7, the setting is in seconds.
This setting defi nes either the upper limit, the upper end of a range for the alarm region or a stop
timeout. Alarm limits are set in display units without regard to decimal point or colon position.
In Rate and Follower Modes, a limit of 123 could represent a display value of 123, 12.3, 1.23, or
0.123. When in Time Mode, a limit of 123 would represent 1:23 on the display. When the upper
limit is being used to set a stop timeout for parameter 50 mode 7, the setting is in seconds.
When set to a value of 5, the unit will be reset to factory default settings. This can also be
achieved by applying power to the unit with both the Enter and Down buttons depressed. The
programming jumper must be in the "On" position for this method to function.
When set to a value of 5, the unit will store all adjustable parameters to the user default area.
The user default area is intended to be a location where an OEM or integrator can store settings
specifi c to their application. Using this, an OEM can easily refresh their custom settings in the
fi eld if an end-user accidentally reconfi gures the unit unsuccessfully. Another common use for
this area is testing and initial setup. The user can store known-good settings here and easily
experiment without the fear of losing the optimal confi guration.
When set to a value of 1, the unit will restore the all adjustable parameters from the user default
area. See parameter 98 for additional information.
23
Page 26

Application Examples
Pump Controller with Audible and Visual Alarm
Description:
A waste pump control which displays the pump rate in liters per minute with an audible and
visual alarm output which will warn the operator if the waste fl ow has stopped. The alarm
should not be able to be silenced and should automatically reset when fl ow rates have returned
to normal. The display should indicate in the format "xxx.x" (LPM).
Application Diagram:
Dart MD10P, MD3P, or MD3E
Motor Control
CONTROLS
ValuPage
Ite
m
153.0
MICRO-DRIVE
Tach
ENTER
Audible
Annunciator
Flow Transducer
(73 Pulses per Liter)
Fluid
Inlet
Fluid
Outlet
Wiring Diagram:
DC Motor
MD10P
MD3P
or
MD3E
P1-1
P1-2
P1-3
P1-4
P1-5
P1-6
P1-7
P1-8
P1-9
P1-10
P1-11
P1-12
Pump
Pump Specs:
19 Shaft Rotations = 2 Liters
N
L
A-
A+
COM
+5V
S1
S2
NO
C
NC
IN1
* Size fuse according to unit and application. See
electrical specifications for maximums.
NOT USED
NOT USED
NOT USED
*FUSE
}
GND
+V
SIGNAL OUT
24
AC Line Input 85-265VAC, 50-60 Hz
MOTOR
FLOW TRANSDUCER
(Frequency Output)
240VAC
Audible
Annunciator
Page 27

Parameter Confi guration:
Parameter Value Notes
10 1 Master, Rate Mode Setting (LPM is a rate-based unit)
13 3 Decimal point position set to XXX.X on display
30 10 Display should indicate 1.0 LPM (10) when pickup at Reference RPM, parameter 31
31 73 This is the RPM at which the Display Reference, parameter 30, should be displayed
32 1 Pulses per revolution of shaft encoder or pickup is 1 PPR
50 7 Alarm active when pickup stalled
53 1 Flash display when alarm is active
57 10 Lower limit setting for pickup stall timeout. Set for 10 seconds.
Conveyor Oven Controller with Two Preset Process Times
Description:
An oven monitor displaying the “tunnel” time in minutes and seconds. The tunnel time is
defi ned as the time it takes for the heated object on the conveyor to travel from point A to point
B in the application diagram below. An external time-select switch should allow the user to
choose between the displayed process time or a second fi xed process time. The time should
be displayed in MM:SS (minutes:seconds) format. The process time should only be allowed
to be adjusted between 6:30 and 12:15.
Application Diagram:
Oven Speed Select Switch
SPEED 1 SPEED 2
A B
Heat Source
Tunnel Oven
CONTROLS
MICRO-DRIVE
Dart MD10P, MD3P, or MD3E
Motor Control
Wiring Diagram:
Ite
ValuPage
m
6:30
Connect to
Coupling
Non-Reduced
Shaft
Dart PU-2E
or equivalent
Tach
ENTER
Gear Motor
Drive Train Specs:
Coupling to
Chain Drive
1380 RPM at non-reduced
motor shaft equates to
6 minutes and 40 seconds
of tunnel time
25
Page 28

Parameter Confi guration:
N
L
A-
A+
COM
+5V
S1
S2
NO
C
NC
IN1
* Size fuse according to unit and application. See
electrical specifications for maximums.
black
red
white
NOT USED
NOT USED
NOT USED
NOT USED
*FUSE
AC Line Input 85-265VAC, 50-60 Hz
}
Speed 1 Select
Speed 2 Select
NC
MOTOR
Dart PU-2E or
Equivalent
Encoder
MD10P
MD3P
or
MD3E
P1-1
P1-2
P1-3
P1-4
P1-5
P1-6
P1-7
P1-8
P1-9
P1-10
P1-11
P1-12
Parameter Value Notes
10 2 Time Mode Setting (MM:SS is a time-based unit)
20 390 Display minimum set to 6:30 (MM:SS)
For example: (6 minutes * 60 seconds-per-minute) + 30 seconds = 390 seconds
21 735 Display maximum set to 12:12 (MM:SS)
For example: (12 minutes * 60 seconds-per-minute) + 15 seconds = 735 seconds
30 400 Display should indicate 6:40 (MM:SS) when motor at Reference RPM, parameter 31
For example: (6 minutes * 60 seconds-per-minute) + 40 seconds = 400 seconds
31 1380 This is the RPM at which the Display Reference, parameter 30, should be displayed
32 1 Pulses per revolution of shaft encoder or pickup is 1 PPR
35 7 Set S2 input mode to jog when low
36 530 Set fixed process time during jog to 8:50 (MM:SS)
For example: (8 minutes * 60-seconds-per-minute) + 50 = 530 seconds
Synchronized Conveyor Controller with Jog Switch
Description:
A synchronized conveyor system comprised of two conveyors with no mechanical linkage
between them. The master conveyor is driven by a basic Dart analog DC motor control.
The slave or follower conveyor should follow the master's position with exacting long-term
accuracy. The slave conveyor should be able to be jogged into position when the master
is stopped at a rate of 350 RPM. The slave conveyor may be adjusted from 90.0% to
110.0% of the master conveyor rate using the user interface.
26
Page 29

Application Diagram:
Master Side
Follower Side
Box A
Conveyor 1
Box B
Conveyor 2
Dart PU-20E
or equivalent
Dart PU-10E
or equivalent
Belt
DC
Gear Motor
Belt
DC
Gear Motor
6
4
Motor
2
Dart 253G or other Motor Control
CONTROLS
8
ON
0
OFF
10
Jog Switch
Jog
Run
MD10P
MD3P
or
MD3E
P1-1
P1-2
P1-3
P1-4
P1-5
P1-6
P1-7
P1-8
P1-9
P1-10
P1-11
P1-12
CONTROL
Tach
Ite
ValuPage
m
ENTER
100.0
MICRO-DRIVE
Dart MD10P, MD3P, or MD3E
Motor Control
N
L
A-
A+
COM
+5V
S1
S2
NO
C
NC
IN1
* Size fuse according to unit and application. See
electrical specifications for maximums.
NOT USED
NOT USED
NOT USED
Jog Switch
*FUSE
AC Line Input 85-265VAC, 50-60 Hz
}
FOLLOWER
MOTOR
black
red
white
white red
black
FOLLOWER PICK-UP
MOUNTED TO
MOTOR SHAFT
Dart PU-10E or
Equivalent
Encoder
MASTER PICK-UP
MOUNTED TO
MOTOR SHAFT
Dart PU-2E or
Equivalent
Encoder
27
Page 30

Wiring Diagram:
Parameter Value Notes
10 3 Follower Mode Setting
13 3 Decimal point position set to XXX.X on display
20 900 Display minimum is 90.0% of master rate
21 1100 Display maximum is 110.0% of master rate
32 5 Pulses per revolution of shaft encoder or pickup is 5 PPR
37 10 Pulses per revolution of shaft encoder or pickup is 10 PPR
40 7 UIN1 configured as jog command when low
41 350 UIN1 jog setpoint is 350 RPM
28
Page 31

Troubleshooting
Problem Possible Case Solution
Display is blank Power not applied
Display is dim Display intensity
When power is
applied, “LF-L” is
displayed
When power is
applied, “LF-H” is
displayed
The alarm output
does not seem to
function
Defective unit
parameter is too low
AC line supplying
power to unit has too
much noise
AC line supplying
power to unit has an
abnormally low
frequency
AC line supplying
power to unit has too
much noise
AC line supplying
power to unit has an
abnormally high
frequency
Alarm output
parameters not
configured properly
Using a volt meter, verify that a voltage between 85 and 265VAC is measured between
the L and N terminal block positions.
Contact technical support for additional help and instructions.
Editing and increasing the display intensity parameter should cause the display digits to
become brighter.
Review routing of power wires in machine to minimize electrical noise. Look for other
devices which share the same circuit which may be producing unacceptable levels of
line noise. In some applications, such as welding equipment, a careful regiment of
applying an AC line filter, re-routine wires, dividing circuits, using shielded cable, and
properly grounding devices will usually solve the problem.
The unit is designed to operate with AC lines from 48-62 Hertz (cycles per second).
This is typically not a problem because the international standards are 50 and 60 Hertz.
Review routing of power wires in machine to minimize electrical noise. Look for other
devices which share the same circuit which may be producing unacceptable levels of
line noise. In some applications, such as welding equipment, a careful regiment of
applying an AC line filter, re-routine wires, dividing circuits, using shielded cable, and
properly grounding devices will usually solve the problem.
The unit is designed to operate with AC lines from 48-62 Hertz (cycles per second).
This is typically not a problem because the international standards are 50 and 60 Hertz.
Alarm output parameters not configured properly
Review alarm output parameters. The alarm relay output can be tested by selecting
the “Always On” value for the Activation Condition parameters for the alarm output.
When doing this, the relay click should be audible and the NC (Normally Closed) and C
(Common) terminals should become internally shorted at the terminal block.
Technical Support Options
• Visit the Dart Controls Web Site at: www.dartcontrols.com
• Email technical support at: techsupport@dartcontrols.com
• Telephone technical support at 317-733-2133 ext. 4
What's Special About www.dartcontrols.com?
• Changes to printed material and product offerings fi rst appear online
• Product manuals and other literature are easily accessible
• All information can be easily displayed or printed as needed
29
Page 32

REPAIR PROCEDURE
Re-Order from
omegamation.com
Omegamation
TM
1-888-55-OMEGA
1-888-55-66342
1-888-55-66342
In the event that a Product manufactured by Dart Controls Incorporated (DCI) is in need of
repair service, it should be shipped, freight paid, to: Dart Controls, Inc., 5000 W. 106th Street,
Zionsville, IN. 46077, ATTN: Repair Department.
Those orders received from anyone without an existing account with DCI will need to specify
if they will be paying COD or Credit Card (Master Card or Visa). This information is required
before work can begin. If you have an account with Dart your order will be processed according to the terms listed on your account.
Completed repairs are returned with a Repair Report that states the problem with the control
and the possible cause. Repair orders are returned via UPS Ground unless other arrangements
are made. If you have further questions regarding repair procedures, contact Dart Controls,
Inc. at 317-733-2133 Ext.460.
YOUR MOTOR SPEED CONTROL SOLUTIONS PROVIDER
125D SERIES
AC INPUT - VARIABLE DC OUTPUT
1/50 HP through 1.0 HP
700/COMMUTROL SERIES
DC BRUSHLESS
5 & 20 Amp for
12,24,& 36VDC Inputs
Dart Controls, Inc. is a designer, manufacturer, and
ma r ket e r of anal o g and
digital electronic variable
speed drives, controls, and
accessories for AC, DC, and
DC brushless motor applica-
tions.
Shown above is just a sampling of the expanded line of
Dart controls that feature the
latest in electronic technology
and engineering. Products are
manufactured in the U.S.A. at
our Zionsville (Indianapolis,
250G SERIES
AC INPUT - VARIABLE DC OUTPUT
1/50 HP through 2.0 HP
MDP SERIES
PROGRAMMABLE
CLOSED LOOP DC
SPEED CONTROL
Indiana) production and headquarters facility - with over
2,000,000 variable speed units
in the fi eld.
In addition to the standard
off-the-shelf products, you can
select from a wide variety of
options to customize controls
for your specifi c application. For
further information and application assistance, contact your
local Dart sales representative,
stocking distributor, or Dart
Controls, Inc.
www.dartcontrols.com
ISO9001:2000 REGISTERED
65 SERIES
DC INPUT - VARIABLE DC OUTPUT
CURRENT RATINGS OF 20, 40, AND
60 AMPS
DM SERIES
FIELD PROGRAMMABLE
DIGITAL TACHOMETER
Dart Controls, Inc.
Manufacturer of high quality DC and AC motor speed
controls and accessories
since 1963.
P.O. Box 10
5000 W. 106th Street
Zionsville, Indiana 46077
Phone: (317) 733-2133
Fax: (317) 873-1105
 Loading...
Loading...