

Page 1
如需洽询或索取本资料 , 请与就近的 NSK 机构联系
www.cn.nsk.com
日 本 精 工 株 式 会 社
恩 斯 克 投 资 有 限 公 司
恩 斯 克 ( 中 国 ) 销 售 有 限 公 司
恩 斯 克 ( 上 海 ) 国 际 贸 易 有 限 公 司
北京分公司
广州分公司
成都分公司
沈阳分公司
大连分公司
长春分公司
天津分公司
南京分公司
重庆分公司
恩 斯 克 投 资 有 限 公 司
恩 斯 克 投 资 有 限 公 司
恩 斯 克 投 资 有 限 公 司
恩 斯 克 投 资 有 限 公 司
恩 斯 克 投 资 有 限 公 司
恩斯克(中国)销售有限公司
恩斯克(中国)销售有限公司
恩斯克(中国)销售有限公司
恩斯克(中国)销售有限公司
深圳代表处
日本精工(香港)有限公司
日 本 精 工 ( 香 港 ) 有 限 公 司
日本东京都品川区大崎1-6-3日精大厦
邮编:141-8560
江苏省昆山市花桥经济开发区恩斯克路8号
邮编:215332
江苏省昆山市花桥经济开发区恩斯克路8号
邮编:215332
江苏省昆山市花桥经济开发区恩斯克路8号
邮编:215332
北京市朝阳区东三环北路5号北京发展大厦2116室
邮编:100004
广州市中山二路18号广东电信广场3101/3102/3106A室
邮编:510080
四川省成都市科华北路62号力宝大厦1栋11楼17号
邮编:610041
辽宁省沈阳市青年大街390号皇朝万鑫国际大厦A栋3805~3806室
邮编:110003
辽宁省大连市中山区中山路136号希望大厦1805号
邮编:116001
吉林省长春市西安大路727号中银大厦A座1001室
邮编:130061
天津市和平区南京路189号津汇广场2座906室
邮编:300050
江苏省南京市汉中路89号金鹰国际商城22层A1座
邮编:210029
重庆市九龙坡区科园二路137号B座23-06/07室
邮编:400039
香港九龙尖沙咀广东道世界商业中心814室
深圳市罗湖区嘉宾路4018号爵士大厦8B08-09
邮编:518001
电话:0081-3-37797111
电话:0512-57963000
电话:0512-57963000
电话:0512-57963000
电话:010-65908161
电话:020-37864833
电话:028-85283680
电话:024-23342868
电话:0411-88008168
电话:0431-88988682
电话:022-83195030
电话:025-84726671
电话:023-68065310
电话:00852-27399933
电话:0755-25904996
传真:0081-3-37797431
传真:0512-57963300
传真:0512-57963300
传真:0512-57963300
传真:010-65908166
传真:020-37864501
传真:028-85283690
传真:024-23342058
传真:0411-88008160
传真:0431-88988670
传真:022-83195033
传真:025-84726687
传真:023-68065292
传真:00852-27399323
传真:0755-25904883
CAT.No.CH-C20155-02a A-7 Printed in China @日本精工株式会社 2007
Megatorque Motor
TM
系统
Megatorque Motor
TM
系
统
(EDC 型驱动器 )
(
EDC
型
驱
动
器
)
使用说明书
使
用
说
明
书
M-E099DC0C2-155C
贩资 CH-C20155-02a
贩
资
CH-C20155-02a
日
本
精
工
株
式
会
社
日本精工株式会社
Page 2
正确使用Megatorque Motor
1. 安全使用
本产品的使用对象为一般工业,并非针对与生命安全相关的场合所设计。
探讨并研究将本产品应用于原子能控制、航空宇宙装置、交通器械、医疗器械、各种安全设备的机器或系统
等特殊用途时,请与本公司咨询。.
本产品是在严格的品质管理下生产的,但是将本产品应用于“可预测由本产品发生故障而导致重大事故或者
损坏的设备”时,请设置安全装置。
2. 驱动器使用注意事项 …为使本产品经久耐用,请遵守以下事项:
(1)环境温度
请在 0~50[℃]环境下使用,超过 50[℃]的高温状态下无法使用本产品。电控箱内,请在驱动器的上下部分
留出 100[mm]以上的充足空间。此外,若热气在驱动器的上方停滞,请将电控箱上方面板对外开放(这种情
况下需要防尘),或者通过强制空气冷却等措施使之尽量处于易散热的环境。
(2)防尘·防水
请在 IP54 以上的电控箱内使用。请从油雾、切削液、切屑碎末、漆雾等环境中隔离保护。若未进行防护,
从驱动器的气窗混入异物,可能会导致电路故障。
(IP 是按照 IEC 标准等规定的对固体异物和水的侵入的保护程度。)
(3)接线·接地
请按使用说明书进行确认,接线是否正确。
实施接线、安装时,请防止切削碎末等异物混入驱动器内部。
请遵守驱动器的电源规格进行使用。
◊ 若在 100[V]规格的驱动器上外加 200[V]的电源,会导致驱动器发生故障。
◊ 若将 200[V]规格的驱动器以 100[V]电源应用时,输出转矩的性能将明显降低,或发出异常噪音。
(4)存放
请勿存放于漏雨、滴水的场所或存在有害气体及液体的场所。
请在避免阳光直射、存放于存储温度及湿度的范围内。
(5)参数更改次数
由于驱动程序的数据通过 EEPROM 进行备份,所以对数据的改写次数(保证有达 10 万次改写)会有限制。
Page 3

3. 电机使用注意事项 …为使本产品经久耐用,请遵守以下事项:
(1)环境温度
请在 0~40[℃]环境下使用,超过 40[℃]的状态下无法使用。
(2)防尘·防水
Megatorque Motor PS 系列为非防尘防水规格。(相当于 IP30)
在含有水、油的环境中无法使用。
(3)使用条件
允许力矩负荷、允许轴向负荷、允许径向负荷根据各电机的尺寸不同而有所差异。请重新确认客户的使用条
件是否在允许负荷之内。
过重的偏负荷与过重的负载会引起转子永久变形和电机内部轴承异常。请务必避免安装电机时电机自身坠
落,对电机的冲击以及移动中所受外部干扰引起的冲击。
请将电机的安装表面的平面度设为小于 0.02[mm]。
(4)定期检查
由于电机的使用环境和条件可能会引起电机的绝缘性能降低或短路·断线等情况。若继续在该状态下使用,
会导致电机原本的性能丧失和驱动器损坏等故障。
为尽早发现及防患未然,请实施绝缘测试等判断电机是否损坏的定期检查。
Page 4
4. 判断为异常前 …请再次检查。
(1)
出现警报
若接通电源不久后立即出现警报,请参照
警报内容和处理方法是否有错?
(2)
电源不通,指示灯不亮
用万用表检查控制电源和主电源输入电压,请按照使用说明书确认是否在驱动器使用电压的范围内。
(3)
无动作
电源关闭状态下,通过手动旋转电机,查看运行是否平稳,是否有卡塞之处,旋转轴的上下方向是否出现间
隙、松散摇晃(请切勿拆卸电机)。
控制信号输入输出是否正常?
◊
请再次确认使用说明书上所记载的警报处理方法。
◊
通过手持终端监视IO:读取控制输入输出 以检查
信号状态。
◊
请用示波器等测量仪器,检查 24[V]电源和输入信号的电压是否稳定。
4.1.
判断异常之前…关于接通电源时的警报
SVON
输入:伺 服
ON 、IPOS
。
输出:定位完成
的
(4)
经常出现振动、位置偏离、警告A3:软过热。
伺服参数LO:负载惯量、SG:伺服增益(或者VG:速度环比例增益、
滤波器
、NP:第 1 陷波滤波器 是否
负载的安装螺钉及电机的安装螺钉是否松动?
◊
请确认、加紧。
驱动器FG端子必须单点接地。(接线请参照使用说明书。)
当转子伺服 ON 停止时,是否对电机旋转方向施加了外力?(一直施加外力,可能会引起电机过热。)
(5)
开关经常跳闸
重新接通电源,恢复后,请进行以下处理。
◊ 断路器的额定电流请根据所使用驱动器的电源容量选定。
进行了调整?
PG
:位置环比例增益)、 FP:第 1 低 通
Page 5
4.1. 判断异常前…关于接通电源时的警报
接口 CN2 的 EMST 输入:紧急停止(第 3 引脚)、OTP·OTM输入:行程限制(第 5、第 6 引脚)未连接时,
接通电源时虽然出现警报情况,
◊
EMST 输入、OTP·OTM 输入的出厂默认设置为 B 接点。
但并不是驱动器机体故障。
实施接线处理,或者按以下步骤变更为 A 接点,可解除
步骤 1. 警报的确认方法
① 接通驱动器的电源。
确认驱动器正面的 7 段 LED。
②
◊ 若处于紧急停止状态,LED按 F → 4 的顺序变化。
◊ 若处于超程状态,LED按 F → 3 的顺序变化。
7 段 LED:显示警报内容。
由于警报通常为 2 位数显示,因此交错显
示两个字符。
若出现 2 个以上的警报时,依据不同警报
依次进行上述显示。
电源
:接通电源后亮灯。
LED
正常:绿色
异常:橙色
出现警报时
步骤 2. 输入端口的极性设定方法
警报
。
电源
:接通电源后亮灯。
LED
正常:绿色
异常:橙色
正常时
① 要变更控制输入的设定,输入命令 MO
:
禁
M
O
ENT
止伺服 ON,使电机处于伺服 OFF 状态。
:
② 输入命令 PI0
显示
③
参数 FN
键,将显示参数
参数
AB:输入极性;然后显示“
编辑控制输入功能。
:
输入功能 后每次按
:振颤信号防止计时器、
NW
?
SP
”。
④要将输入接点变更为 A接点,输入参数 AB0。
输入后,再次显示提示“
则
EMST
⑤输入命令
输入变成A接点。
SV
:允许伺服 ON,将电机恢复至允
许伺服 ON 状态。
?” 接着按 ENT
键
P
ENT
?
0
0
ENT
ENT
?
ENT
I
SPSP
BA
VS
◊ 设定 OTP 输入为 A 接点时,输入命令 PI2,请按上述相同的步骤执行。
◊
设定 OTM 输入为 A 接点时,输入命令 PI3,请按上述相同的步骤执行。
:MO
:_
:
PI0
FNEMST;_
FNEMST;
AB1;
NW0.2
?_
?
AB0
?
:_
:SV
:_
Page 6

5. 其他
请按指定组合下使用电机与驱动器。
请务必将参数留底保存。
请勿对电缆进行改造。
请确认连接器是否锁紧,螺钉是否松动。
请准备好维修配件(用于更换电机、驱动器、电缆等)。
请避免使用稀释剂清扫,请使用酒精
。
Page 7

(空白页)
Page 8

1. 前言
1. 前言
z
本说明书为
关于本说明书的对象系统,请参照「2.4. 标准组合列表」。
z
初次操作
z
此外,在「2.5. 电机规格」中仅记载了有关PS型标准电机。关于其它电机,请在规格说明书上进
行确认。
Megatorque Motor
Megatorque Motor
系统(
EDC
型驱动器)的使用说明书。
时,请仔细阅读本说明书,了解内容后再进行实际使用操作。
— 1-1 —
Page 9
1. 前言
1.1. 安全事项
1.1.1. 安全事项的相关内容
z
为安全使用
z
本说明书中,就安全事项添加了以下的标记并详细进行了记载。
1.1.2. 使用注意事项
z
系统安装、维修、检查及故障排除时请注意以下几点:
Megatorque Motor
:
若不谨遵操作指示,可能会导致重大的人身伤害
:
可能会导致人身伤害
:
可能会导致机器、设备及工件出现故障
:
电机与驱动器的组合,请使用与电机尺寸以及最大输出转矩相符合的产品。
,请仔细阅读使用说明书,详细了解后再进行操作。
•
由于在驱动器内部保存了相匹配电机的数据。
• 组合请参照「
• 请确认电机、驱动器各自的标称号中所记载的记号的组合是否合适(电机尺寸、
最大输出转矩及位置检测器规格)。
•
若组合的标称号有误时,不仅精度下降,出现异常噪音,还可能会引起不旋转
或失控等情况。
2.4.
标准组合列表」。
:
请勿切断后延长、缩短、转接电缆。
•
若改装电缆时,可能导致精度下降,出现异常噪音。
:
请勿拆卸电机机体。
•
若拆卸电机机体,可能导致刚度、精度下降,出现异常噪音。
:
请务必将客户装置端的紧急停止连接至
紧急停止。
•
:
请勿拆卸驱动器的外壳。
•
出现异常时,能够立即停止电机。
驱动器内部装有大型电解电容器,关闭主电源后几分钟内仍带有电压。
CN2
:控制输入输出接口的
EMST
输入:
— 1-2 —
Page 10
:
若连续大负荷运转,可能需要另置的再生电阻。
•
Megatorque Motor
• 再生电力蓄积在驱动器内部的电容器中,连续产生大再生电力而未能完全蓄积
时,发生警报
• 在这种情况下,降低运行速度、加碱速度、运行占空比等运行条件,或者需要
在驱动器外部外加再生电阻。
:
请勿让驱动器接触水、油等物质。
•
请勿让驱动器接触水滴、油滴、金属粉末等尘埃及腐蚀性气体。
在减速大负载惯量时,会产生再生电力。
P1
:主电源过电压,电机停止。
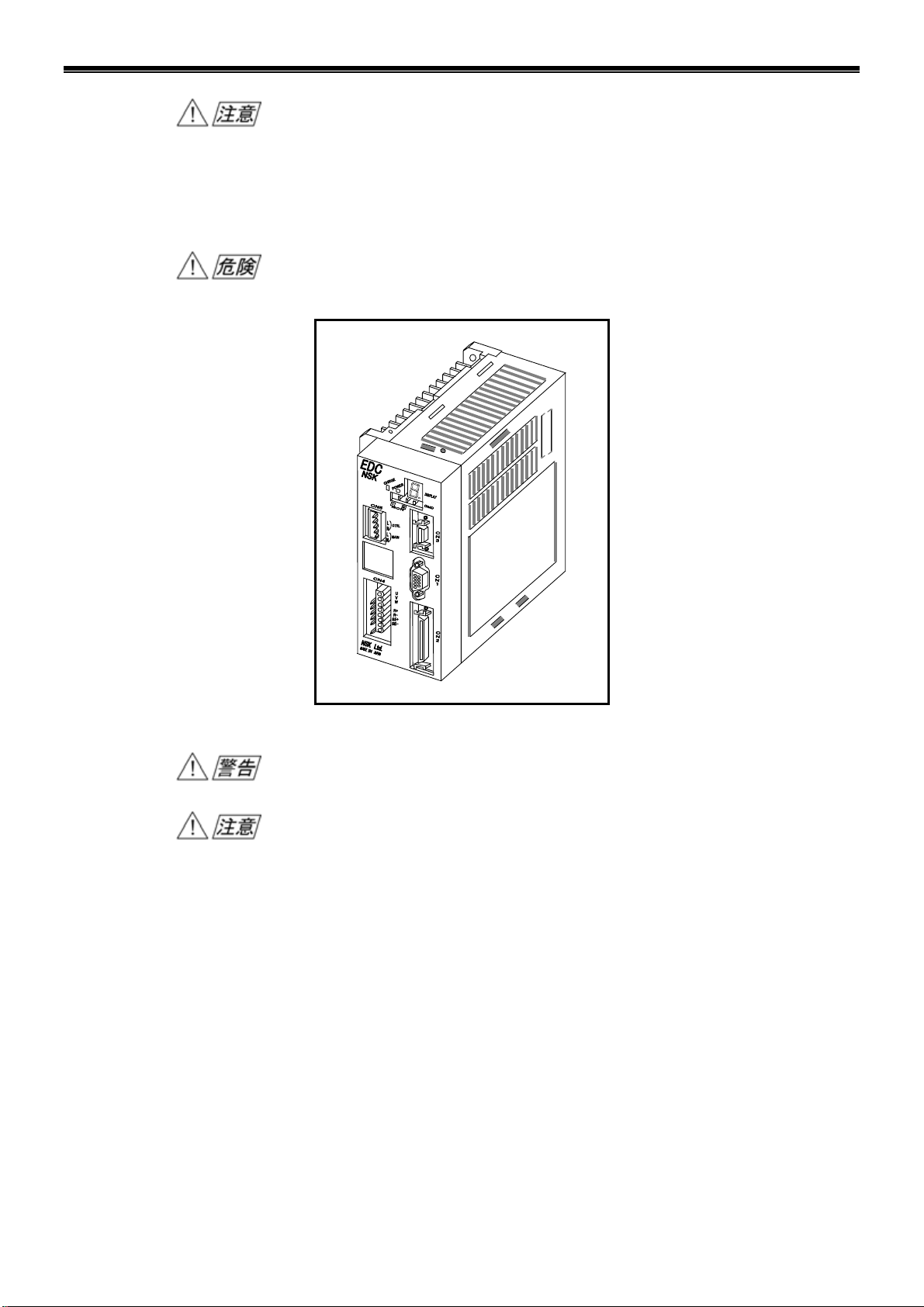
1. 前言
图
1-1:EDC
:
请勿测量驱动器的绝缘电阻。
(可能导致内部电路损坏。)
:
出厂时的状态并不能发挥电机原有的性能。请进行调整。
•
调整方法请参照「5.调整」。
型驱动器外形
— 1-3 —
Page 11
1. 前言
:
允许力矩负荷、允许轴向负荷、允许径向负荷根据各个电机尺寸不同而有所差异。
请确定客户的使用条件是否在允许负载之内。
•
关于各电机的允许力矩负荷、允许轴向负荷、允许径向负荷的详情,请参照「
电机规格」。
:
过重的偏负荷与负载会引起转子永久变形和电机内部轴承异常。请务必避免设置
电机时电机本身的坠落,对电机的冲击以及移动中受外部干扰引起的冲击。
•
若未遵守上述注意事项,可能会导致电机内部的轴承故障,电机机械性地锁住。
•
请将电机的安装表面的平面度设为小于
:
若电机在
:
请勿用锤等工具直接撞击电机。
45[°]
的范围之内反复运转时,请每天一次将电机旋转
0.02mm。
90[°]
以上。
若直接对电机的侧面部分和固定安装在电机的零部件进行撞击,可能会使内部检
测器的精度下降。
:
在电机外部添加旋转支撑部件(轴承、滚珠螺杆等)时请进行精确调心(偏差
0.01[mm]
以内),过重的偏负荷及负载可能会引起电机内部轴承异常。
2.5.
:
根据客户的使用条件,电机可能处于高温情况下,请在充分冷却的状态下再进行
操作,请避免烧伤!
:
电机上有旋转部件和非旋转部件,包括客户所安装的部分,请注意不要被旋转部
件夹伤。
— 1-4 —
Page 12

1.1.3.兼容性
兼容型
z
标准
EDC
型驱动器与电机具有兼容性。
因此,即使生产编号不相同的电机、驱动器,也可进行组合使用。
z
此外,电机、驱动器、电缆组的标称号的组合详情,请参照「2.4. 标准组合列表」。
1. 前言
非兼容型
z
特殊规格的型号可能会存在电机与驱动器的不兼容的情况。请参照该产品规格表。
z
如果不兼容,请使用相同生产编号的电机与驱动器的组合。此外,请使用指定的电缆组。
z
如果采用了生产编号不同的电机和驱动器组合,或者改变了电缆的长度,则无法满足规格书上所记
载的内容,敬请注意。尤其是在内置绝对型位置检测器的系统中,则无法再现原点。
— 1-5 —
Page 13

1. 前言
1.2. 术语定义
z
电机本体
z
驱动器
z
电缆组
z
手持终端
z
VG-----------------------------
z
LO -----------------------------
z
[计数/转
----------------------
-------------------------
-------------------------
----------------------
]-----------------
将大扭矩电机、位置检测器、轴承一体化的装置
内置
Megatorque Motor
连接电机本体与驱动器的电缆
设定参数、编程等使用的
速度环比例增益
速度指令与速度信号的差值,即对速度偏差进行与VG相当的常数倍放大
后,作为转矩指令进行输出。
负载惯量
设定安装在电机上的负载惯量。
单位[
kg・m
表示分辨率的单位。
在本说明书中,有时候将根据该单位的值记载为「脉冲」或「
2
]
专用控制器的驱动器
RS-232C
通信终端(型号:
FHT21)
pulse」。
使用如下述命令,进行驱动器的功能设定和操作。
z
命令
z
z
----------------------------
参数
----------------------------
◊
全局参数
◊
局部参数
监视器
-------------------------
--------------------------
--------------------------
是对驱动器发出执行操作·处理的指令。
例如定位运行的启动·停止等。
驱动器内置功能的操作设定进行保存。
通过变更这些设置,执行所要求的操作。
保持驱动器的内部状态。
例如有电机的旋转速度·坐标等,任何时候可读取这些状态。
在命令行所设置的参数。
特别是需要与局部参数区分开时,使用该名称。被保存在非
易失性存储器中。
根据程序运转而临时启用的参数。
并不被保存在非易失性存储器中。
— 1-6 —
Page 14
◎欧洲 EC 指令
国际安全标准
Megatorque Motor
满足
EC
指令,本电机系统符合低电压指令的相关标准。
系统作为内置于机械、设备而使用的零部件(组件),为了使相应的机械·设备更为容易的
◎符合 EMC 指令
本
Megatorque Motor
的连接电缆模型下符合
在安装到实际的机器、设备等情况下,由于考虑到接线条件、安装条件等模型不尽相同,对于安装了本电机系统
的机器、设备是否符合
符合标准
电机
电机/驱动器
系统,在规定的“驱动器和电机之间的安装距离”、“接线”等模型(条件)下,并在 4m
EMC
指令的相关规定。
EMC
指令(特别是辐射噪声、传导噪声),需要对最终机器、设备进行测定。
表1:符合
对象 符合标准
EN60034-1
EN50178
EN55011
EN55011
EN61000-6-2
EN61000-4-2
EN61000-4-3
EN61000-4-4
EN61000-4-5
EN61000-4-6
EN61000-4-8
EN61000-4-11
EMC
指令的标准
Group1、Class A
:
Group1、Class A
:
工业环境下的抗干扰标准
:
耐静电放电
:
耐射频辐射
:
耐脉冲杂讯
:
耐雷击浪涌
:
耐射频传导
:
商用工频磁场
:
耐电压变动
:
传导噪声
辐射噪声
符合低电压指令
的相关标准
符合 EMC 指令的
相关标准
Page 15
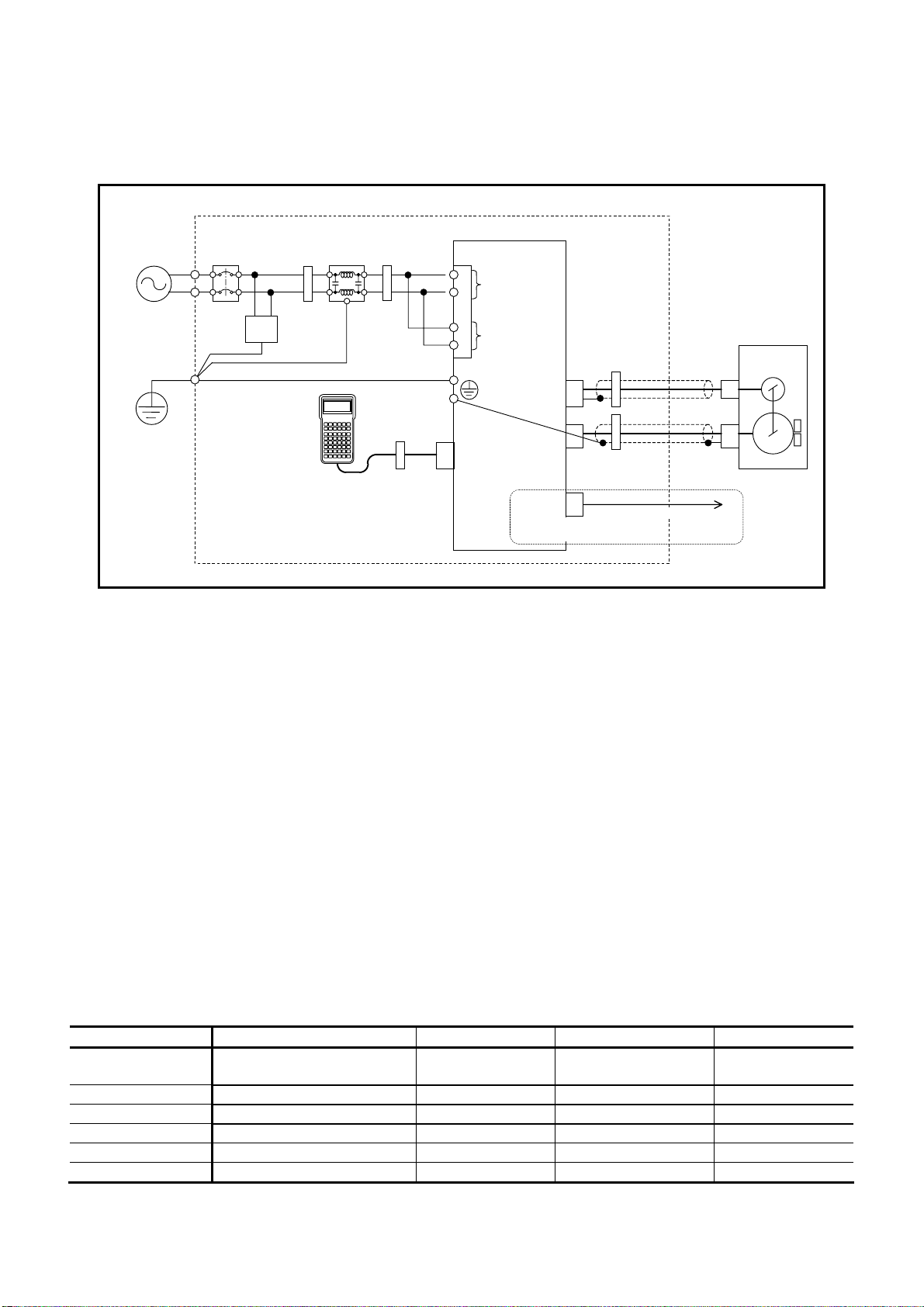
◎符合 EC 指令的安装环境
按照推荐接线示例布线,可使之符合 EC 指令
电源
AC
电控箱
断路器
浪涌吸收器
超声滤波器
铁氧体磁芯1
(绕线1圈)
铁氧体磁芯2
(绕线2圈)
保护接地
(PE)
铁氧体磁芯3
(
手持终端
型驱动器
EDC
CN5
L
N
L
N
绕线2圈
)
CN1
图 1:推荐接线示例
控制电源
主电源
CN3
CN4
CN6
支持 CC-Link
的驱动器的情况下
铁氧体磁芯3
(绕线1圈)
铁氧体磁芯3
(绕线1圈)
连接至 CC-Link 主单元
PS型
Megatorque motor
旋转变压
编码器
电机
安装环境
驱动器适合在
IEC60664-1 所规定的污染级别 2 或污染级别 1 的环境下使用。为此,请安装于具有
水、油、尘埃等不能进入的构造(IP54)的电控箱内。
电源
请在 IEC60664-1 所规定的过压保护类别Ⅲ的环境下使用。
断路器
噪声滤波器
铁氧体磁芯
请在电源与驱动器之间务必连接符合
请在电源与驱动器之间安装噪声滤波器。
IEC
标准及UL认证的断路器。
请在电源线、电机电缆、旋转变压编码器电缆上安装铁氧体磁芯。
接地
为防止触电,请务必将驱动器的接地端子连接至保护接地(PE)。
表2:推荐适用辅助设备列表
类型 规格 制造商型号 制造商 备注
断路器 额定电流 15[A] 单相:EA32AC-15
噪声吸收器 单相:AC250[V],10[A]
浪涌滤波器 −
铁氧体磁芯 1 −
铁氧体磁芯 2 −
铁氧体磁芯 3 −
FN2070-10/07
R-A-V781BWZ-4
E04SR301334
E04SR241336A
E04SR211132
Fuji Electric
SHAFFNER
Okaya electric
Seiwa Electric MFG
Seiwa Electric MFG
Seiwa Electric MFG
IEC 规格及
UL 认证产品
Page 16
◎符合 UL 标准
符合UL 标准
表3:符合UL标准
对象 符合标准 文件编号
UL
电机
驱动器
电缆组 使用 UL 认证的零部件
标准认证条件
UL1004 E216970
UL508C E216221
下述为UL标准认证条件,请根据以下条件进行安装。
安装环境
驱动器适合在
IEC60664-1 所规定的污染级别 2 或污染级别 1 的环境下使用。为此,请安装于具有
水、油、尘埃等不能进入的构造(IP54)的电控箱内。
电源
请在
IEC60664-1
断路器
请务必在电源与驱动器之间连接符合 UL 认证的断路器(规格请参照前页)。
接地
为防止触电,请务必将驱动器的接地端子连接至保护接地(PE)。
所规定的过压保护级别Ⅲ的环境下使用。
Page 17

(空白页)
Page 18
2. 规格
2. 规格
2.1.
系统构成
2.1.1. 运行方式
EDC 型驱动器适用于 4 种接口,可如「表 2-1:适用接口与运行方式」运行。
表
2-1
:
适用接口与运行方式
适用接口 运行方式 使用控制器 用途
运行方式>
• 可编程控制器(输入输出单元)
•
数控系统(带 M 输入输出功能)
• 可编程控制器(定位单元)
• 脉冲串输出定位控制器
• 可编程控制器
(串行通信单元)
• RS-232C 终端
(计算机等)
• 支持 CC-Link 的可编程控制器
一般控制输入
脉冲串输入
RS-232C 通信
CC-Link
<编程运行方式>
• 将定位命令当作驱动器的程序来存储
•
通过输入通道选择信号和程序启动信号进行
定位
• 命令为绝对式或增量式
<JOG 运行方式>
• 通过输入 JOG 运行或 JOG 运行方向旋转至
任意位置
<原点复位方式>
• 可设定当前位置为坐标原点,或者通过原点
限位信号输入来进行原点复位
• 通过输入启动原点复位运行信号来执行
脉冲串输入
<
• 根据输入脉冲数定位
<RS-232C 通信运行方式>
• 直接从主机控制器给与定位命令
<程序运行方式>
• 通过程序启动命令进行定位
<JOG 运行方式>
• 通过 JOG 运行命令,旋转至任意位置
<原点复位运行方式>
• 通过启动复位运行命令来执行
<程序运行方式>
• 使用 CC-Link 上的输入通道选择和输入启动
程序进行定位
<JOG 运行方式>
• 通过 CC-Link 上的输入 JOG 运行并输入
JOG 运行方向,旋转至任意位置
<原点复位运行方式>
• 通过 CC-Link 上输入启动原点复位运行来执
行
• 各种索引定位
• 间歇进给控制
— 2-1 —
Page 19
2. 规格
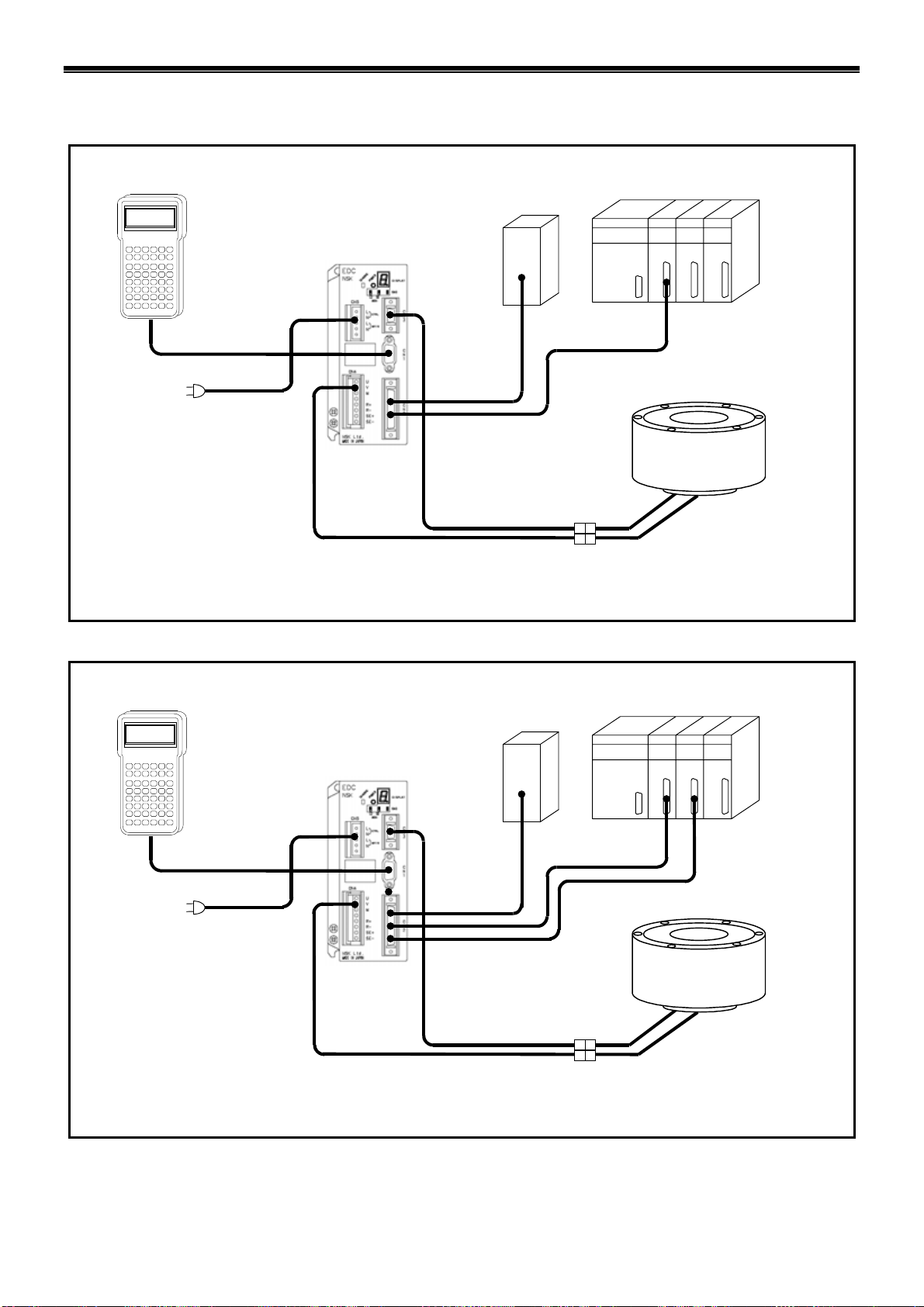
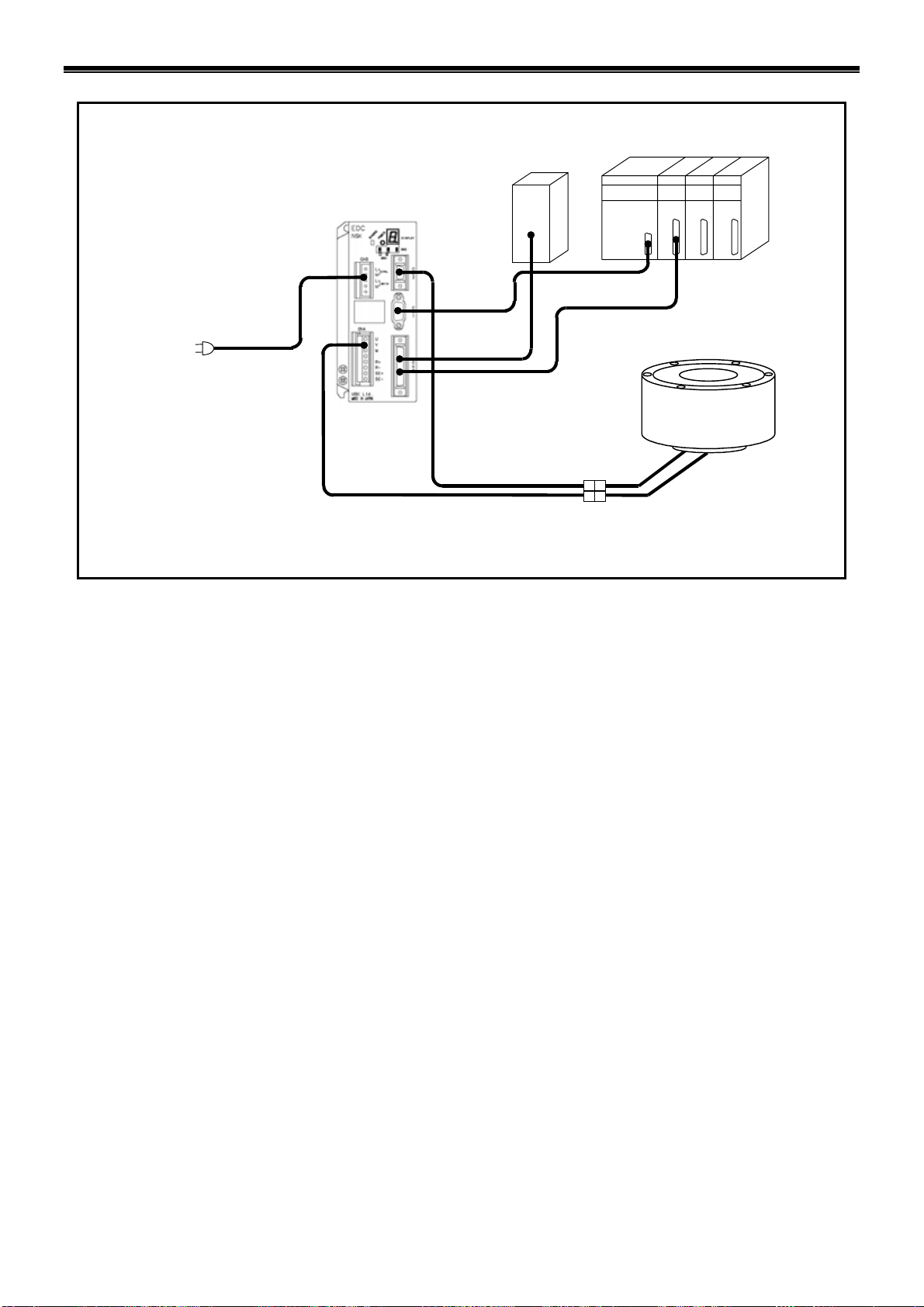
2.1.2. 系统构成示例
手持终端
NSK
#
&
单相
单相
HANDY TERMINAL
>
3 <2 $1
- +5 %4
)
8 (7 ‘6
. =0 ?9
CBA FED
IHG LKJ
ONM RQP
UTS XWV
?ZY */,
CTRLESCSHIFT ENTSPBS
RS-232C
电源
AC200〜230V
或者
AC100〜115V
电源
控制输入输出信号
通信
DC24V
型驱动器
EDC
控制电源
电缆组
可编程控制器
电机控制器
※
※
、
※
等
旋转变压编码器电缆
电机电缆
PS型Megatorque Motor
※由客户方准备。
图
2-1
:系统构成示例(程序运行方式)
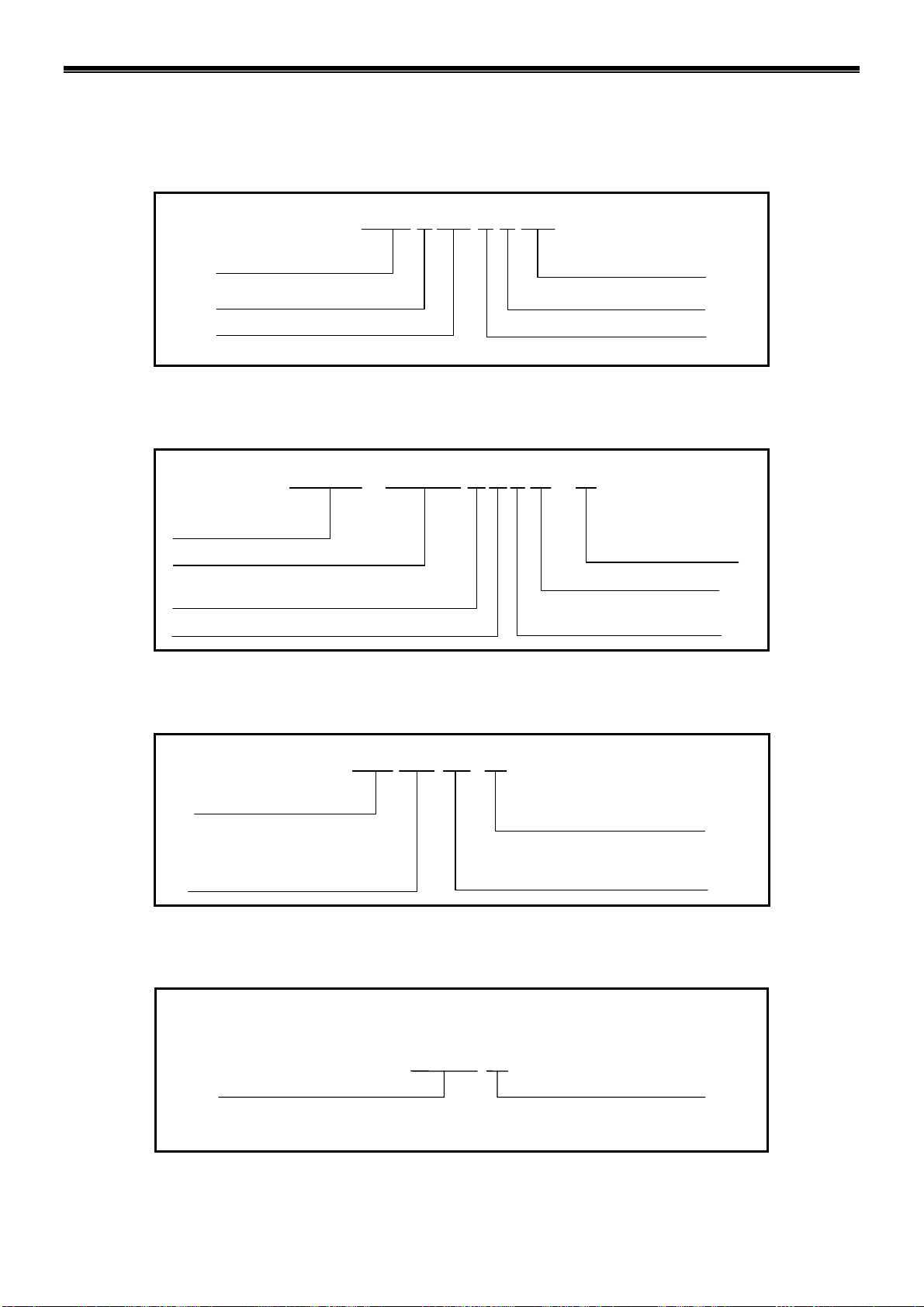
手持终端
NSK
#
&
单相
单相
HANDY TERMINAL
>
3 <2 $1
- +5 %4
)
8 (7 ‘6
. =0 ?9
CBA FED
IHG LKJ
ONM RQP
UTS XWV
?ZY */,
CTRLESCSHIFT ENTSPBS
RS-232C
电源
AC200〜230V
或者
AC100〜115V
电源
控制输入输出信号
通信
DC24V
型驱动器
EDC
控制电源
电缆组
可编程控制器
电机控制器
※
脉冲串输入
※
、
※
等
旋转变压编码器电缆
电机电缆
PS型Megatorque Motor
※由客户方准备
图
2-2
:系统构成示例(
脉冲串输入
运行方式)
— 2-2 —
Page 20
2. 规格
DC24V 电源
可编程控制器
电机控制器
※
※
等
※
、
EDC 型驱动器
RS-232C
控制输入输出信号
电源
通信
控制电源
单相 AC200〜230V
或者
单相 AC100〜115V
电缆组
旋转变压编码器电缆
电机电缆
PS 型 Megatorque Motor
※由客户方准备。
图
2-3
:系统配置示例(
RS-232C
运行方式)
— 2-3 —
Page 21
2. 规格
2.2.
标称号构成
2.2.1. PS 型电机标称号构成
Megatorque Motor
PS系列
电机尺寸号
最大输出转矩[N・m]
M-PS 1 006 K N 002
图
2-4:PS
型电机标称号构成
2.2.2. 用于 PS 型电机的 EDC 型驱动器标称号构成
M-EDC – PS1006AB5 02–01
EDC 型驱动器
电机尺寸号
电源电压
C: AC100~115[ V](单相)
位置检测器规格 B:内置绝对式位置检测器
A:AC200~230[V
图
2-5
:用于PS型电机的
](单相)
EDC
设计追加编号
002:标准
:无制动器
N
K:内置绝对式位置检测器
01: 附有连接器,安装金属配
件,使用说明书(日文)
: 附有连接器,安装金属配
02
件,使用说明书(日文)
设计追加编号 02:标准
功能 5:标准规格
C:CC-Link
型驱动器标称号构成
(选件)
2.2.3. 用于 PS 型电机的电缆组标称号构成
2.2.4. 手持终端
Megatorque Motor 用
电缆组
电缆长度
例: 002… 2[ m] , 004… 4[ m] ,
010…10[ m] , 015…15 [ m],
030…30[m]
标称号构成
手持终端
M-C 004 SCP 03
图
2-6:用于 PS 型电机的电缆组
图
2-7
标称号构成
M-FHT 21
手持终端追加编号
:手持终端标称号构成
设计追加编号
03:固定电缆
:可动电缆
13
型驱动器用
EDC
— 2-4 —
Page 22
2. 规格
2.3.
各部分名称
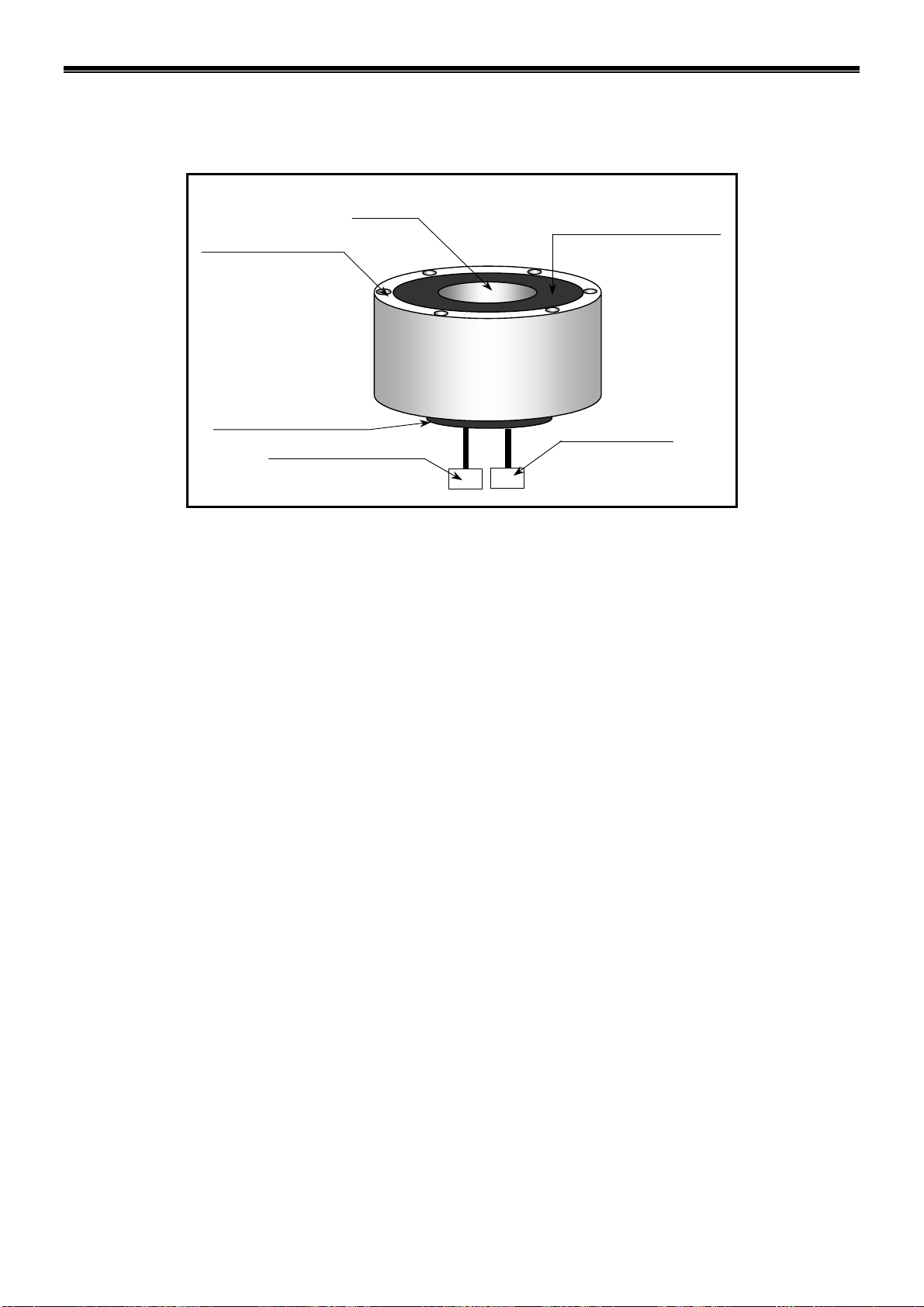
2.3.1. PS 型电机各部分名称
转子(旋转部件)
定子(非旋转部件)
旋转变压编码器连接器
中空孔
图
2-8:PS
型电机各部分名称
防尘罩(非旋转部件)
电机连接器
— 2-5 —
Page 23
2. 规格
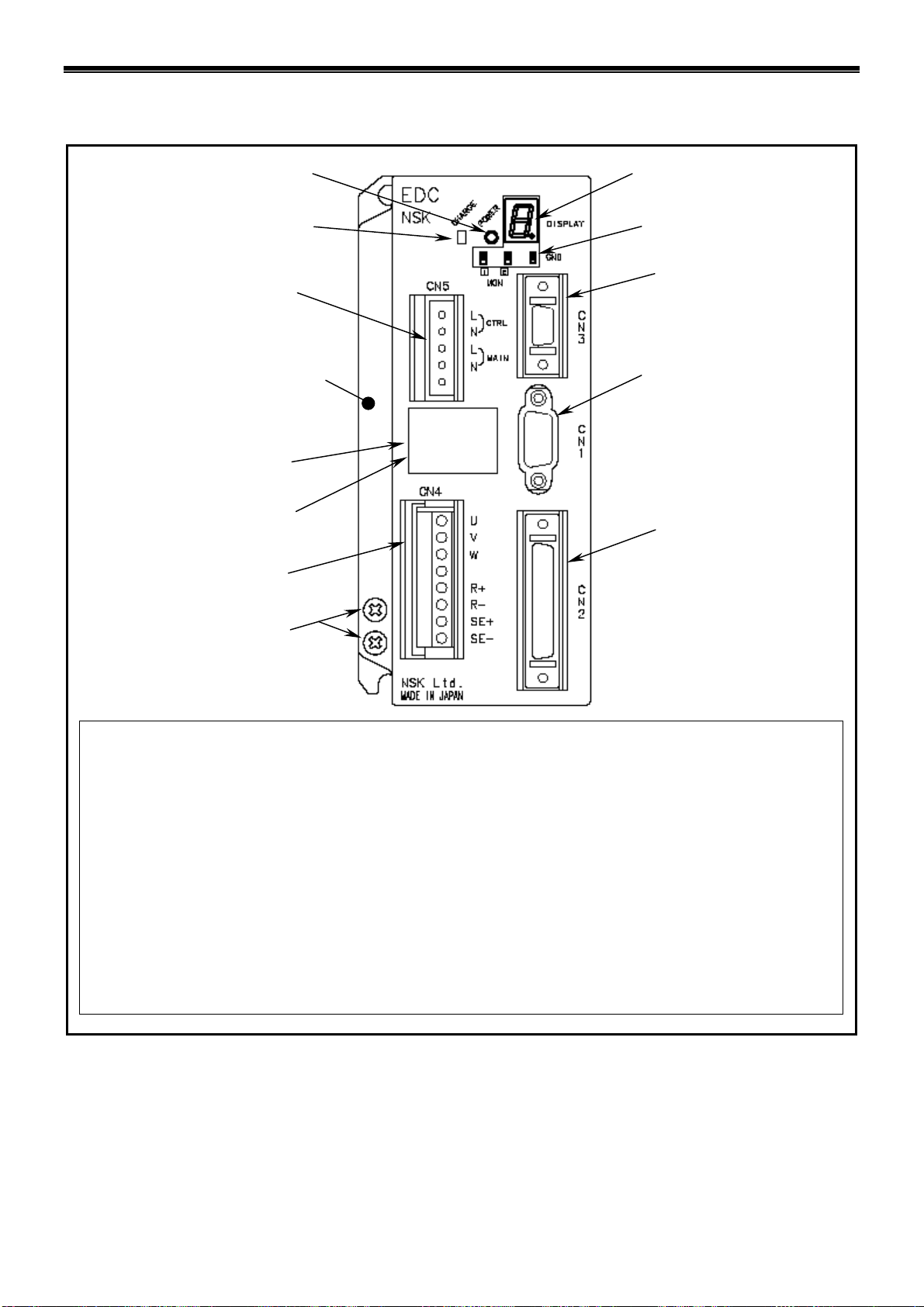
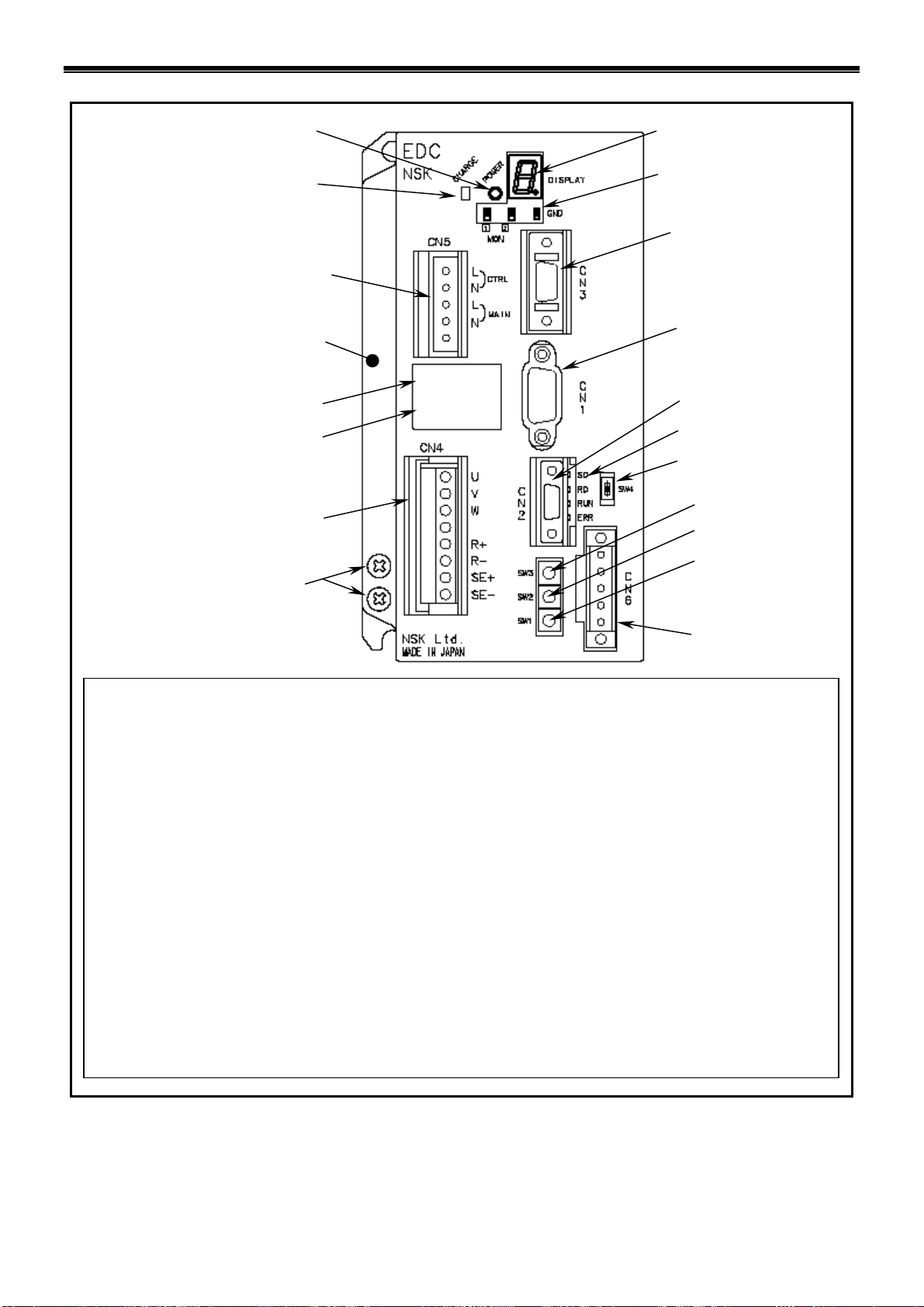
2.3.2. EDC 型驱动器各部分名称
①
⑫
⑪
散热片
⑧
⑨
⑥
⑦
②
⑩
⑤
③
④
电源
LED
⑴
7段LED
⑵
CN1(9pin)
⑶
用于
连接另售的
CN2(50pin)
⑷
电机控制信号输入输出的接口(I/O)
CN3(14pin)
⑸
用于旋转变压编码器电缆的接口
连接专用旋转变压编码器电缆。
CN4
⑹
用于电机电缆的接口
连接专用电机电缆。
RS-232C
规格串行通信的接口
FHT21
手持终端。
图
2-9:EDC
型驱动器各部分名称(标准型)
接地端子
⑺
M4螺钉
⑻
铭牌
Type
铭牌
⑼
No.
监视器端子
⑽
CN5
⑾
电源接口
⑿
功率放大器带电显示
在放大器内的电容中还有电压时会亮灯。
(编号名称)
(系列编号)
— 2-6 —
Page 24
2. 规格
①
⑫
散热片
⑧
⑨
⑥
⑦
②
⑩
⑤
⑪
③
④
⑱
⑭
⑰
⑯
⑮
⑬
电源
⑴
⑵
⑶
⑷
⑸
⑹
⑺
⑻
LED
7段
LED
CN1(9pin)
用于
RS-232C
连接另售的
CN2(10pin)
电机控制信号输入输出接口
CN3(14pin)
用于旋转变压编码器电缆的接口
连接专用旋转变压编码器电缆。
CN4
用于电机电缆的接口
连接专用电机电缆。
接地端子
M4
螺钉
铭牌
Type
(编号名称)
规格串行通信的接口
FHT21
手持终端。
(I/O)
⑼
⑽
⑾
⑿
⒀
⒁
⒂
⒃
⒄
⒅
铭牌
No.
(系列编号)
监视器端子
CN5
电源接口
功率放大器带电显示
在放大器内的电容中还有电压时会亮灯。
CN6
CC-Link
SW4
终端电阻设置
SW1
区域设置(×10)
SW2
区域号设置(×1)
SW3
波特率设置
监视器
接口
LED
图
2-10:EDC
型驱动器各部分名称(支持
— 2-7 —
CC-Link)
Page 25
2. 规格
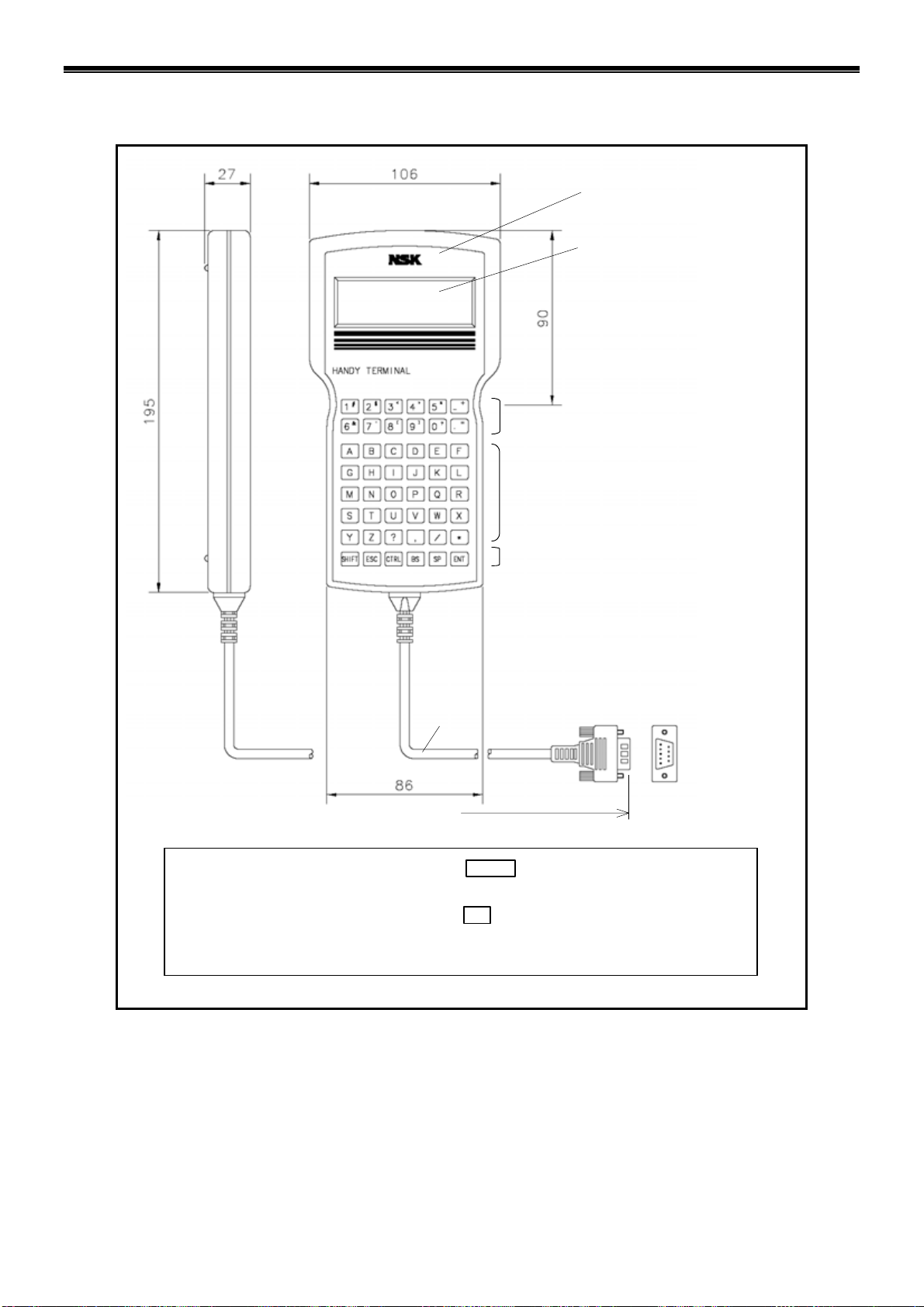
2.3.3. 手持终端各部分名称
机体
LCD(显示画面)
电缆部
数字键
代码键(右上方小字
字母键
特殊
SHIFT :Shift 键
ESC :Escape 键
CTRL :Ctrl 键(未使用
BS :退格键
SP
ENT
代码键
:
空格键
:
回车键
(电缆长 3000)
注释(1)
注释(2)
注释(3)
注释(4)
)
未使用)
(
)
注释: ( 1) SHIFT : 输入代码键时,边按住 SHIFT 键再按数字键。
将显示数字键右上方的小文字
( 2) BS : 若输入错误
( 3) SP : 请在输入空格
( 4) ENT : 输入各命令及参数后按回车键。
图
2-11
,按退格键
空白)时使用
(
:手持终端各部分名称(
BS
。
。
。
M-FHT21)
— 2-8 —
Page 26
2. 规格
2.4.
标准组合列表
2.4.1. 驱动器与电机的匹配组合
电机
外径
[mm]
φ100
φ150
φ100
φ150
电机标称号
M-PS1006KN002
M-PS1012KN002
M-PS1018KN002
M-PS3015KN002
M-PS3030KN002
M-PS3060KN002
M-PS3090KN002
M-PS1006KN002
M-PS1012KN002
M-PS1018KN002
M-PS3015KN002
M-PS3030KN002
M-PS3060KN002
M-PS3090KN002
驱动器标称号
**部为套装品规格
M-EDC-PS1006AB502-** AC200~AC230
M-EDC-PS1006CB502-** AC100~AC115
M-EDC-PS1012AB502-** AC200~AC230
M-EDC-PS1012CB502-** AC100~AC115
M-EDC-PS1018AB502-** AC200~AC230
M-EDC-PS1018CB502-** AC100~AC115
M-EDC-PS3015AB502-** AC200~AC230
M-EDC-PS3015CB502-** AC100~AC115
M-EDC-PS3030AB502-** AC200~AC230
M-EDC-PS3030CB502-** AC100~AC115
M-EDC-PS3060AB502-** AC200~AC230
M-EDC-PS3060CB502-** AC100~AC115
M-EDC-PS3090AB502-** AC200~AC230
M-EDC-PS3090CB502-** AC100~AC115
M-EDC-PS1006ABC02-** AC200~AC230
M-EDC-PS1006CBC02-** AC100~AC115
M-EDC-PS1012ABC02-** AC200~AC230
M-EDC-PS1012CBC02-** AC100~AC115
M-EDC-PS1018ABC02-** AC200~AC230
M-EDC-PS1018CBC02-** AC100~AC115
M-EDC-PS3015ABC02-** AC200~AC230
M-EDC-PS3015CBC02-** AC100~AC115
M-EDC-PS3030ABC02-** AC200~AC230
M-EDC-PS3030CBC02-** AC100~AC115
M-EDC-PS3060ABC02-** AC200~AC230
M-EDC-PS3060CBC02-** AC100~AC115
M-EDC-PS3090ABC02-** AC200~AC230
M-EDC-PS3090CBC02-** AC100~AC115
表
2-2
:驱动器与电机的组合
电源电压[V] 电缆标称号 主要规格
M-C0**SCP03
(固定电缆)
M-C0**SCP13
(可动电缆)
**
部分为电缆长度
01: 1[m]
02: 2[m]
03: 3[m]
04: 4[m]
05: 5[m]
06: 6[m]
07: 7[m]
08: 8[m]
09: 9[m]
10:10[m]
15:15[m]
20:20[m]
30:30[m]
程序 256 通道
脉冲串输入
(光电耦合器规格)
支持 CC-Link
程序
256通道
— 2-9 —
Page 27
2. 规格
2.4.2. 电缆组
表
功能 电缆长度[m]
1 M-C001SCP03
2 M-C002SCP03
3 M-C003SCP03
4 M-C004SCP03
5 M-C005SCP03
6 M-C006SCP03
固定电缆
可动电缆
7 M-C007SCP03
8 M-C008SCP03
9 M-C009SCP03
10 M-C010SCP03
15 M-C015SCP03
20 M-C020SCP03
30 M-C030SCP03
1 M-C001SCP13
2 M-C002SCP13
3 M-C003SCP13
4 M-C004SCP13
5 M-C005SCP13
6 M-C006SCP13
7 M-C007SCP13
8 M-C008SCP13
9 M-C009SCP13
10 M-C010SCP13
15 M-C015SCP13
20 M-C020SCP13
30 M-C030SCP13
2-3
:电缆组标称号
电缆组标称号
2.4.3. 手持终端(用于输入参数、程序)
表
2-4
:手持终端标称号
手持终端标称号
M-FHT21
— 2-10 —
Page 28
2. 规格
2.5.
电机规格
2.5.1. PS 型电机规格
规格项[单位]
电机外径
最大输出转矩
额定输出转矩
电机高度
电机中空孔
最高旋转速度
额定旋转速度
旋转位置检测器分辨率
绝对定位精度
反复定位精度
允许轴向负荷
允许径向负荷
允许力矩负荷 [N・m] 28
转子惯量 [kg・m
推荐负载惯性 [kg・m
重量
环境条件
表
2-5:PS1
电机机体标称号
[mm] φ100
[N・m]
[N・m]
[mm]
[mm]
1
−
[s
] 10
1
−
[s
] 5
[
计数/转
[
秒
[
秒
[N]
[N]
[kg]
]
]
]
2
]
2
] 0.015〜0.24 0.03~0.31 0.03〜0.38
M-PS1006KN002 M-PS1012KN002 M-PS1018KN002
1 000 (
820 (
型电机规格
6
2
85
0.0024
2.4
使用温度 0~40[℃],湿度 20~80%,在无尘埃、结露、腐蚀性气
体等的室内使用(相当于 IP30)
※环境温度保持在 25℃±5 之内。
12
4
110
φ35
2 621 440
兼容
±2
轴向负荷为
径向负荷为
0.0031
3.5
※
90
0[N]时
0[N]时
18
6
135
)
)
0.0038
4.5
表
规格项[单位]
电机机体标称号
2-6:PS3
M-PS3015KN002 M-PS3030KN002 M-PS3060KN002 M-PS3090KN002
型电机规格
电机外径 [mm] φ150
最大输出转矩 [N・m]
额定输出转矩 [N・m]
电机高度
电机中空孔
最高旋转速度 [s
额定旋转速度 [s
旋转位置检测器分辨率
绝对定位精度
[mm]
[mm]
1
−
] 10 8
1
−
] 5 1
[
计数/转
[秒]
15
5
85
]
30 60
10 20
102 136
φ56
2 621 440
90
兼容
反复定位精度 [秒] ±2
允许轴向负荷
允许径向负荷
允许力矩负荷 [N・m] 42
转子惯量 [kg・m
推荐负载惯性 [kg・m
质量
[N]
[N]
[kg]
2
]
2
] 0〜1.1 0~1.4 0.12~1.9 0.12〜2.4
環境条件
2 000 (
1 700 (
0.011
5.5
0.014 0.019
6.9 11.0
使用温度 0~40[℃],湿度 20~80%,在无尘埃、结露、
腐蚀性气体等的室内使用(相当于 IP30)
径向负荷为
轴向负荷为
※环境温度保持在 25[℃]±5 之内。
SI 单位 1[N]≒0.102[kgf]
1[N·m]≒0.102[kgf·m]
※
0[N]时
0[N]时
90
30
170
5
1
)
)
0.024
13.8
无论 PS 型电机系列的 EDC 型驱动器的输入电压为 100V 还是 200V,同样适用。
— 2-11 —
Page 29
2. 规格
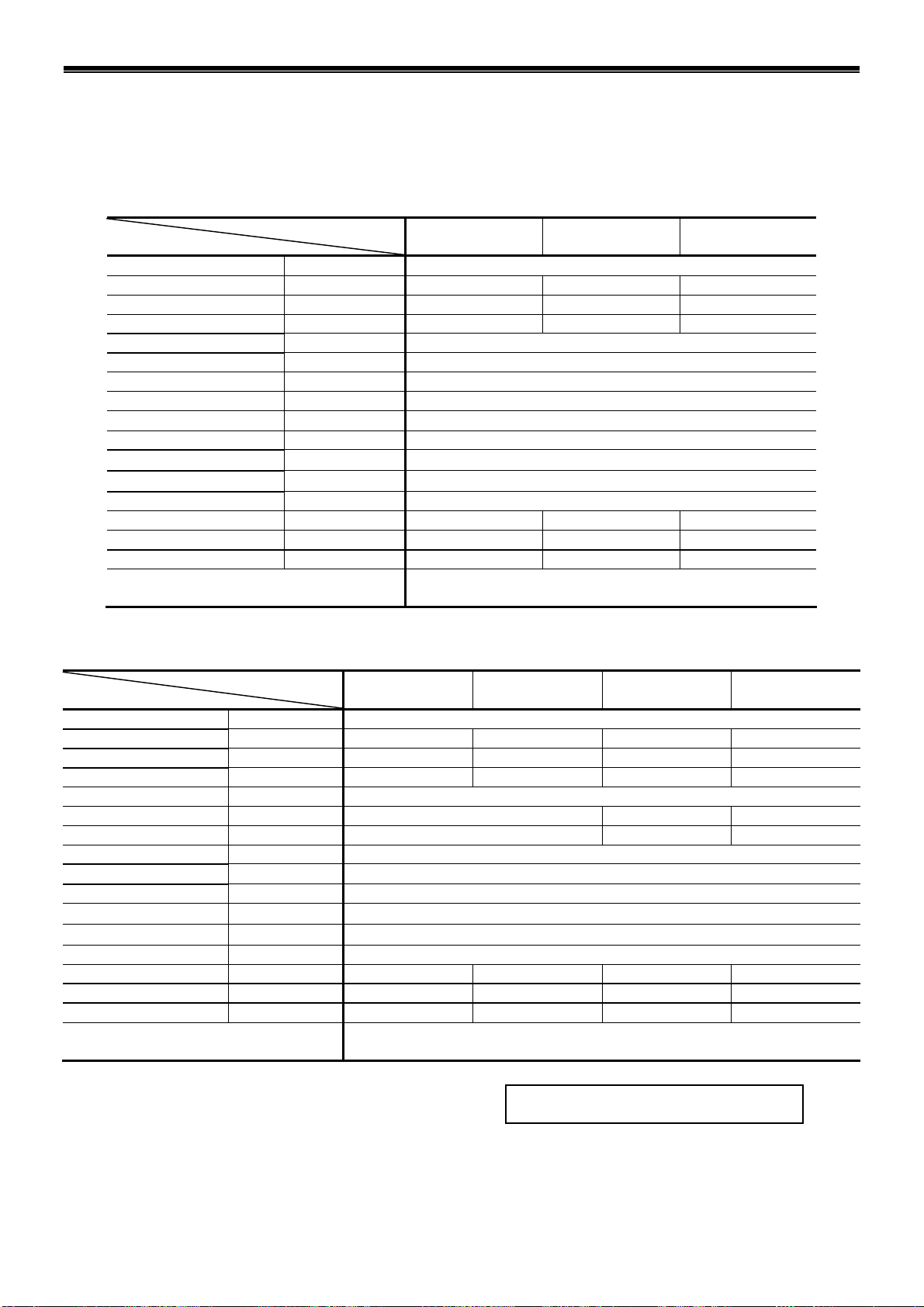
2.5.2. 对电机施加的负荷
: ・
请将轴向负荷Fa设为低于允许轴向负荷。
・
・
F
若将 F 作为外力
①
轴向负荷:Fa =F+夹具、机件等的重量
力矩负荷:M=0
电机机体标称号
A
请将径向负荷Fr设为低于允许径向负荷。
请将力矩负荷M设为低于允许力矩负荷。
L
F
若将 F 作为外力
尺寸
②
轴向负荷:Fa =F+夹具、机件等的重量
力矩负荷:M=F ×L
表
[mm]
图
2-12
:对电机施加负载
2-7
:从轴承到转子上表面的距离
M-PS1006KN002
M-PS1012KN002
M-PS1018KN002
30.2 32.9
M-PS3015KN002
M-PS3030KN002
M-PS3060KN002
M-PS3090KN002
若将 F 作为外力
③
径向负荷 :Fr =F +夹具、机件等的重量
力矩负荷:M =F×(L +A)
F
LA
— 2-12 —
Page 30
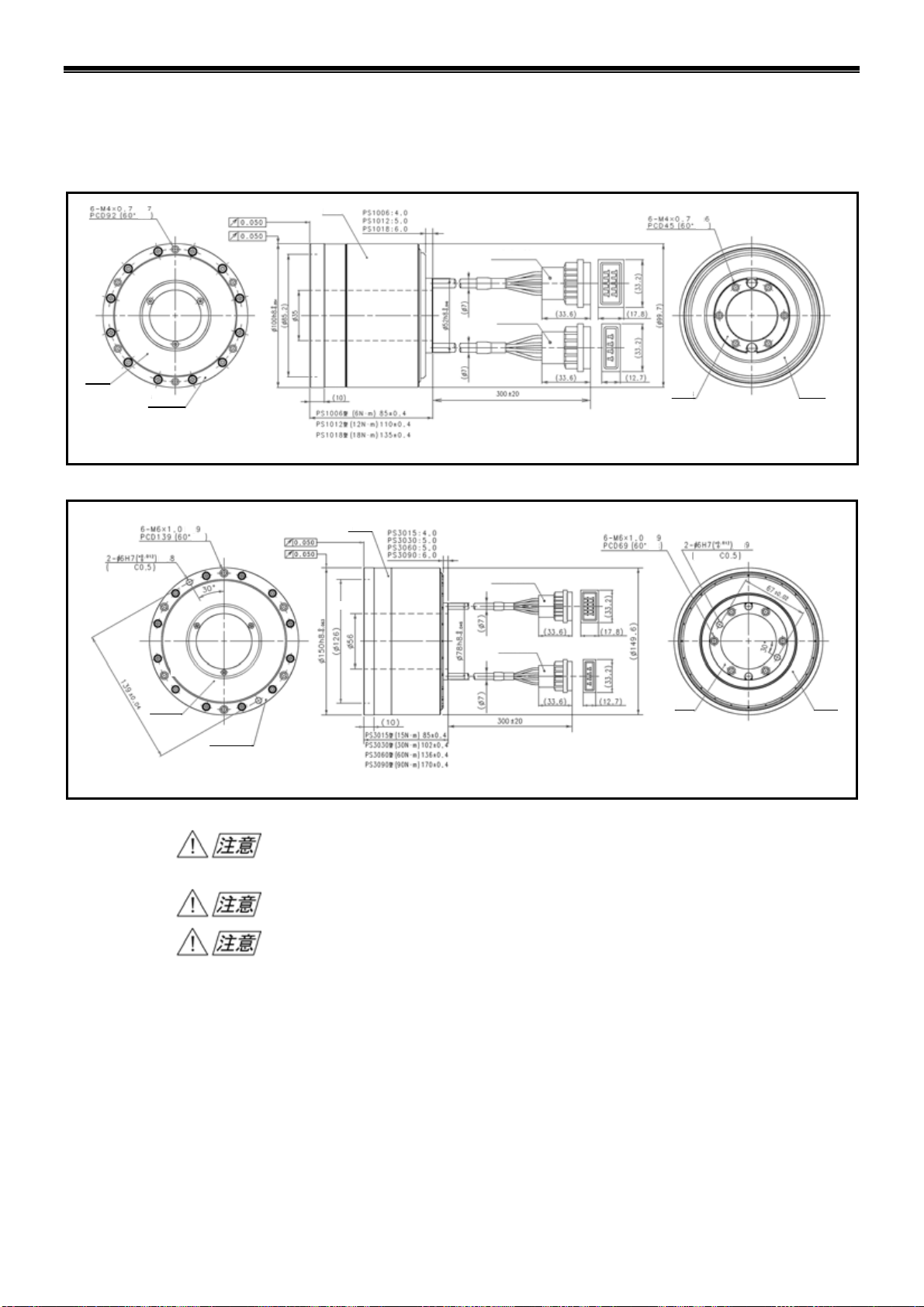
2.6. 外形尺寸
2.6.1. 电机外形尺寸
深
均布
外罩
非旋转部
输出轴
材 质:铝
旋转部
旋转部
2. 规格
旋转变压编码器电缆
电机电缆
图
2-13:PS1
型电机
固定部
深
均布
外 罩
非旋转部
旋转部
深
均布
开口倒角
外 罩
非旋转部
深
输出轴
材 质 :铝
旋转部
:
请将电机电缆引出线(
设为大于
:
请勿将电机电缆引出线、旋转变压编码器电缆引出线在可移动部分使用。
:
请勿在引出线与连接器的连接部分施加压力(张力、振动等)。可能会导致断线或接触
不良。
R30[mm]。
旋转变压编码器电缆
电机电缆
图 2-14:PS3 型电机
φ
7
部分)、旋转变压编码器电缆引出线(
深
均布
固定部
开口倒角
深
外 罩
非旋转部
φ
7
部分)的弯曲半径
— 2-13 —
Page 31

2. 规格
2.6.2. EDC 型驱动器外形尺寸
* M-EDC-PS*****B502-01
* M-EDC-PS*****B502
的连接器、安装用金属零部件、使用说明书放置在同一包装内 。
的连接器、安装用金属零部件、使用说明书另售。
(适用于以下电机型号:
图
2-15:EDC
型驱动器外形尺寸
PS100、PS1012、PS1018、PS3015、PS3030
)
图
2-16:EDC
型驱动器外形尺寸
(适用于以下电机型号:
— 2-14 —
PS3060、PS3090
)
Page 32

2. 规格
* M-EDC-PS*****BC02-01
M-EDC-PS*****BC02
的连接器、安装金属部件、使用说 明书放置在同一包装内。
的连接器、安装金属部件、使用说明书另售。
图
2-17
(适用于以下电机型号:
:支持
CC-Link的EDC
型驱动器外形尺寸
PS1006、PS1012、PS1018、PS3015、PS3030
)
图
2-18
:支持
CC-Link 的 EDC
(适用于以下电机型号:
— 2-15 —
型驱动器外形尺寸
PS3060、PS3090
)
Page 33

2. 规格
2.6.3. 电缆组外形尺寸
:
当用于可移动部分时,请使用可动电缆。
2.6.3.1
2.6.3.2
固定电缆
电机端
可动电缆
:
请将电机电缆(
R43[mm]
大于
:
请勿在电缆与连接器的连接部分施加压力(张力、振动等)。可能会导致断线或接
触不良。
φ
8
部分),旋转变压编码器电缆(
,并确保其固定。
旋转变压编码器电缆
φ
8.5
部分)的弯曲半径设为
驱动器端
图
2-19
:固定用电缆组(
M-C0
**
SCP03)
:
请勿将以下部分设置为可动部。
• 电机端插头外壳端面
•
驱动器端的插头组件及连接器头的端面开始 200[mm]范围内区域
:
请将电机电缆(
弯曲半径设为大于
φ
8
部分)、旋转变压编码器电缆(
R80[mm]
请将固定部分的弯曲半径设为大于
:
请勿在电缆与连接器的连接部分施加压力(张力、振动等)。可能会导致断线或接
触不良。
电机端
图
2-20
旋转变压编码器电缆
:可移动电缆组(
200[mm]范围内区域
。
R40[mm]
M-C0
**
SCP13)
φ
8.5
部分)的可移动部分的
,并确保其固定。
驱动器端
— 2-16 —
Page 34

2. 规格
2.7.
适用电机型号
输出电流
输入电源
位置检测器分辨率[计数/转]
最高旋转速度[s-1]
定位运行方式
输入信号
输出信号
保护功能
电机功能
通信
数据备份
其它
现场总线
环境条件
内置功能
安全标准
连接器
质量[kg]
驱动器规格
额定输出电流[Arms]
最大输出电流[Arms]
额定电源容量[kVA]
最大电源容量[kVA]
控制电源规格
主电源对应范围
脉冲串输入
控制用输入
位置反馈信号
控制用输出
使用温度/存放温度
使用湿度/存放湿度
耐振动
再生电路
动态制动
UL
CE
RS-232C CN1
制御用IO
位置检测器
电机・外部再生
电阻
控制・主电源
CC-Link
(选项)
表
2-8:EDC
PS1006 PS1012 PS1018 PS3015 PS3030 PS3060 PS3090
单相 AC100V~AC115/单相 AC200V~230V
电源电压波动低于±10%
程序运行(256 通道),脉冲串输入运行,RS-232C 运行,JOG 运行,原点复位运行
光电耦合器输入
输入脉冲方式:CW/CCW,脉冲/方向,A 相/B 相
根据电子齿轮可乘以任意倍数(1
光电耦合器输入(±极性信号可通用)×17 输入
紧急停止,解除报警,+方向行程限制,-方向行程限制,伺服ON,启动程序,停止,
切换内部编程·通道0~7,JOG运行,JOG运行方向,
(保持,限速倍率,关闭积分控制,启动复位运行,原点限位)
信号输出形态:A/B/Z 相 线路驱动器输出,A相·B相分辨率可任意分频
A 相,B 相分辨率: 出厂时
※最大频率为781[kHz],根据设定分辨率最高速度将受到限制。
(最高转速[s-1]=781[kHz]/A(B)相分辨率)
Z 相分辨率:80[计数/转]
光电耦合器输出(±极性信号可通用)×8 输出
驱动器准备完成、警告、检测出+·-方向行程限制、伺服状态、运行中、定位完成、靠近目标位置 A、
(靠近目标位置 B、区域
低于/超出指定速度、低于/超出转矩指令,低于/超出指定热负荷、原点复位完成、原点确定)
超出指定位置偏差、程序异常、自动调整错误、位置指令·反馈异常、现场总线警告
主电源低压、超程限制、
现场总线异常、位置检测器异常、绝对位置异常、电机断线、超速、旋转变压编码器励磁放大器警报
常、过热、电源过电压、过电流、控制电源电压下降、电源模块报警
模拟监视器×2(任意设定偏移·范围),
RS-232C
EEPROM
自动调整
可分配控制输入输出的功能,在程序运行中可暂时设定参数
可单独设定加速·减速度,凸轮驱动曲线(变形正弦,变形梯形,摆线,单弦)
支持
0~50℃/-20~+70℃
90%以下(无结露)
4.9m/s
连接外置再生电阻至(另售:
关闭电源,关闭伺服,使用保护功能时工作,
根据命令可解除制动(参照「9.2. 命令解说」KB命令)
UL508C
LVD
EN50178
EMC EMI:EN55011,EMS:EN61000-6-2
D-sub9
标准规格 :半间距连接器 50 引脚(客户端连接器)
CN2
CC-Link
CN3
半间距连接器 14 pin
塑料连接器(
CN4
CN5
塑料连接器(
CN6
连接器
0.8 1.2 2.1 2.1 2.5 4.1 4.0
2.4 3.5 5.8 6.6 8.2 14.9 14.9
0.23 0.38 0.50 0.47 0.77 1.30 1.70
0.67 1.20 1.50 1.40 2.40 3.90 5.90
最大脉冲串频率:1[MHz]
(异步 9600bps)
(更改参数/取消次数为 10 万次)
CC-Link Ver.1.10 (支持
2
引脚
规格 :半间距连接器 10 引脚(客户端连接器)
UL,CE
UL,CE
MSTB2,5/5-STF-5,08AU
型驱动器规格
000~5 242 880[计数/转])
20
1
310 720[计数/转](4倍增后 5 242 880[计数/转])
最大
A·B·C、检测出±方向行程限制、正常、低于/超出指定位置偏差、
RAM
异常、
CC-Link的EDC
M-E014DCKR1-100
认证产品)
认证产品)(客户端连接器)
标准规格:1.1
CC-Link
※1 因电机型号不同而有所差异。请参照「2.5. 电机规格。」
※2 通过变更控制输入输出的分配,变为有效。
2 621 440
※1
10
电压规格:24[V]
480[计数/转](4倍增后 81 920[计数/转])
最大开断能力:DC24[V]/50[mA]
ROM
异常、系统异常、接口异常、
RS-232C
监视器
※
2
、软过热、原点未确定、
ADC
异常、紧急停止、
型驱动器时)
)R+、R-.禁止短路
(菲尼克斯电气)
规格:1.3
标准规格:1.8
CC-Link
规格:2.0
※
2
CPU
异常、
、整流异
— 2-17 —
Page 35

2. 规格
2.8. RS-232C
接口规格
有关 RS-232C 通信规格的详情,请参照「8.9. RS-232C 通信」。
有关计算机等控制机器连接电缆接线详情,请参照「附录 6:
◊ 连接电缆可使用本公司制造的通信电缆「
2.8.1. CN1:用于 RS-232C 规格的串行通信接口
※作为 RS-232C 终端可使用本公司制造的手持终端(另售)。
表
2-9:CN1
)
日本航空电子工业株式会社制造
日本航空电子工业株式会社制造
日本航空电子工业株式会社制造
2.8.1.1.
驱动器端连接器
适用连接器(客户端)
适用外罩(客户端)
引脚阵列(
CN1)
适用连接器
※
RS-232C 通信电缆接线」。
M-C003RS03」(另售)。
DELC-J9SAF-13L9E
DE-9PF-N※
DE-C1-J6R※
由客户自己提供
使用本公司制造的手持终端时则不需要。
2.8.1.2.
信号名称与功能(
引脚
号码
1 TXD
2 CTS
3 RXD
4 DSR
5 DTR
6 SG
7 RTS
8
9 FG
TXD
CTS
RXD
DSR
DTR
图
1
2
3
4
5
2-21:CN1
SG
6
RTS
7
5V
+
8
FG
9
引脚阵列
CN1)
表
2-10
:信号名称与功能(
信号名称 I/O 功能
输出 数据通信
允许发送
输入
数据接收
输入
数据设定状态就绪
输入
数据终端就绪
输出
信号用接地
-
请求发送
输出
+5V 输出
(禁止连接)
外壳接地
-
CN1)
— 2-18 —
Page 36

2. 规格
2.9.
控制输入输出接口规格
2.9.1. CN2:用于控制输入输出的接口
CN2 上所使用的连接器及客户端连接器显示在「表 2-11:CN2 适用连接器」。
驱动器端连接器 Molex 制造
适用连接器(客户端) Molex 制造
适用外罩(客户端) Molex 制造
在 CN2 上接线注意以下几点:
①对
CN2 的接线请使用屏蔽线。
②脉冲串输入及位置反馈输出使用双绞线,请尽可能缩短接线距离(最大 2[m])。
③与电源线在不同的通道上进行接线。
④屏蔽线一侧的保护端子连接至外壳接地。
关于连接方法,请参照「3.3.3. 接地」。
:
请勿将电源反向连接、引脚间短路等错误布线。
:
请勿对已标明“禁止连接”的引脚进行接线。
请勿进行诸如在
操作。
• 若在已标明“禁止连接”的引脚处接线,易受噪声等影响而引起运行异常或
驱动器受损。
表
2-11:CN2
CN2
适用连接器
52986-5079
54306-5019
54331-0501
所有引脚处接线,而不在主机控制器端(
PLC
等)接线等的
— 2-19 —
Page 37

2. 规格
A
2.9.1.1.
引脚阵列
(CN2)
CN2:控制输入输出接口 的引脚阵列显示在「图 2-22:CN2 引脚阵列」(出厂时的状态)。
CN2 的各个端口可变更输入输出的分配(除部分端口外)。
◊ 与扩展功能替换
◊ 将以分配的功能变更至其他端口
◊ 屏蔽未使用的端口
安全功能专用输入
EMST
通用输入
EMST
CLR
OTP
OTM
SVON
RUN
STP
PRG0
PRG1
PRG2
PRG3
PRG4
PRG5
PRG6
PRG7 :切换内部程序·通道 7
JOG
DIR :JOG
HLD
ORD
IOFF
HOS
HLS
NONE
:紧急停止
:紧急停止
:解除警报
:+方向行程限制
:-方向行程限制
:伺服
:启动程序
:停止
:切换内部程序·通道
:切换内部程序·通道
:切换内部程序·通道
:切换内部程序·通道
:切换内部程序·通道
:切换内部程序·通道
:切换内部程序·通道
:
:保持
:限速倍率
:关闭积分控制
:启动原点复位运行
:原点限制
:(无功能设定)
ON
JOG运行
运行方向
0
1
2
3
4
5
6
安全功能专用输入
1
2
DC24
4
PI1
(ACLR)
6
PI3
(OTM)
8
PI5
(RUN)
10
−
12
PI8
(PRG1)
14
PI10
(PRG3)
16
PI12
(PRG5)
18
PI14
(PRG7)
20
PI16
(DIR)
22
CWP+
DC24
27
COM
3
PI0
(EMST)
5
PI2
(OTP)
7
PI4
(SVON)
9
PI6
(STP)
11
PI7
(PRG0)
13
PI9
(PRG2)
15
PI11
(PRG4)
17
PI13
(PRG6)
19
PI15
(JOG)
21
−
29
PO1
(WRN)
31
PO3
(OTMA)
33
PO5
(BUSY)
35
PO7
(
NEARA
37
*CHA
39
*CHB
41
*CHZ
43
SGND
45
−
47
−
23
24
CCWP+
CWP-
49
−
25
CCWP-
26
COM
28
PO0
(DRDY)
30
PO2
(OTPA)
32
PO4
(SVST)
34
PO6
(IPOS)
)
36
CHA
38
CHB
40
CHZ
42
−
44
−
46
−
48
−
50
−
DRDY
NRM
通用输出
DRDY
WRN
OTPA
OTMA
SVST
BUSY
IPOS
NEARA
NEARB
ZONEA
ZONEB
ZONEC
TEU
TEO
TVU
TVO
TTU
TTO
TJU
TJO
OTXA
NRM
HOME
HCMP
NONE
:
驱动器准备完成
:
正常
:驱动器准备完成
:警告
:检测出+方向行程限制
:检测出-方向行程限制感知
:伺服状态
:运行中
:定位完成
:靠近目标位置
:靠近目标位置
:区域
A
:区域
B
:区域
C
:低于指定位置偏差
:超出指定位置偏差
:低于指定速度
:超出指定速度
:低于转矩指令
:超出转矩指令
:低于指定热负荷
:超出指定热负荷
:检测出±方向行程限制
:正常
:原点复位完成
:原点确定
:(无功能设定)
A
B
注:括号()内为出厂时的设定
连字符“-”为禁止连接的引脚。
图
2-22:CN2
引脚阵列
PI0·PO0 是安全功能主干信号的专用端口。有如下限制:
◊ 端口 PI0(CN2:3 号引脚)的 EMST 输入:紧急停止 无法变更功能。
仅可设定输入接点及振颤信号防止计时器。
◊ 端口 PO0(CN2:28 号引脚)的 DRDY 输出:驱动器准备完成 仅可与 NRM 输出:正
常 的功能进行替换。
无法设定输出逻辑与状态稳定计时器。
— 2-20 —
Page 38

2. 规格
2.9.1.2.
输入/
输出
输入信号
输出信号
信号名称与功能
引脚
号码
10 − − −
11 PI7 PRG0 A
12 PI8 PRG1 A
13 PI9 PRG2 A
14 PI10 PRG3 A
15 PI11 PRG4 A
16 PI12 PRG5 A
17 PI13 PRG6 A
18 PI14 PRG7 A
19 PI15 JOG A
20 PI16 DIR A
21 − − −
22 − CWP+ −
23 − CWP− −
24 − CCWP+ −
25 − CCWP− −
26 − COM −
27 − COM −
28 PO0 DRDY
29 PO1 WRN
30 PO2 OTPA
31 PO3 OTMA
32 PO4 SVST
33 PO5 BUSY
34 PO6 IPOS
35 PO7 NEARA
36 − CHA −
37 − *CHA −
38 − CHB −
39 − *CHB −
40 − CHZ −
41 − *CHZ −
42 − − −
43 − SGND −
44 − − −
45 − − −
46 − − −
47 − − −
48 − − −
49 − − −
50 − − −
端口
名称
1 − DC24 −
2 − DC24 −
3 PI0 EMST B
4 PI1 ACLR A
5 PI2 OTP B
6 PI3 OTM B
7 PI4 SVON A
8 PI5 RUN A
9 PI6 STP A
(CN2)
信号名称
表
2-12:CN2
接点
逻辑
正 驱动器准备完成
负 警告
负 检测出+方向行程限制
负 检测出-方向行程限制
正 伺服状态
正 运行中
正 定位完成
正 靠近目标位置 A
信号名称与功能(出厂默认状态)
名称
外部供给电源 DC24[V]
外部供给电源
紧急停止
解除警报
+方向行程限制
-方向行程限制
伺服
ON
启动程序
停止
切换内部程序·通道 0
切换内部程序·通道 1
切换内部程序·通道 2
切换内部程序·通道 3
切换内部程序·通道 4
切换内部程序·通道 5
切换内部程序·通道 6
切换内部程序·通道 7
JOG
运行
JOG
运行方向
(禁止连接)
CW 脉冲串(+)
CW 脉冲串(-)
CCW 脉冲串(+)
CCW 脉冲串(-)
输出信号 common 点
输出信号 common 点
位置反馈信号
位置反馈信号 *A 相
位置反馈信号
位置反馈信号 *B 相
位置反馈信号
位置反馈信号 *Z 相
信号接地
DC24[V]
(禁止连接)
A相
B相
Z相
(禁止连接)
(禁止连接)
(禁止连接)
(禁止连接)
(禁止连接)
(禁止连接)
(禁止连接)
(禁止连接)
功能
输入信号用外部电源
输入信号用外部电源
中止运行,通过动态制动停止
解除警告
限制顺时针方向的旋转
限制逆时针方向的旋转
使电机处于伺服ON状态
通过
停止运行·程序运行
通过内部编程·通道切换
ON/OFF
(通道0~
启动·停止
指定
按照脉冲串向正方向旋转
按照脉冲串向负方向旋转
用于输出信号 common
用于输出信号 common
通知运行准备完成(运行准备未就绪及出现警报时为开)
通知警告
检测出正方向限制(软件·硬件)
检测出负方向限制(软件·硬件)
通知伺服状态
通知运行状态
通知位置偏差状态·定位运行状态
通知靠近目标位置
显示电机旋转量的脉冲信号
通过线路驱动器输出
A相·B 相的输出脉冲数可任意分频
位置反馈信号接地
PRG
输入,启动已指定的程序
的组合选择要运行的通道
255
JOG
运行方向
)
JOG
运行
-
的
0~7
-
可切换为:脉冲/方向,A 相
/B 相 形式;
输入脉冲可任意分频
-
-
-
-
-
-
-
-
:
在特殊规格品中,关于特殊输入输出信号的产品,请遵照该产品规格书。
:
请勿对已标明“禁止连接”的引脚实施接线。
请不要在
CN2
所有的引脚处接线,而不在主机控制端(
PLC
等)接线。
— 2-21 —
Page 39

2. 规格
输入/
输出
输入功能
输出功能
功能名称
HLD
ORD
IOFF
HOS
HLS
NEARB
ZONEA
ZONEB
ZONEC
TEU
TEO
TVU
TVO
TTU
TTO
TJU
TJO
OTXA
NRM
HOME
HCMP
保持
限速倍率
关闭积分控制
启动原点复位运行
原点限制
靠近目标位置 B
区域 A
区域 B
区域 C
低于指定位置偏差
超出指定位置偏差
低于指定速度
超出指定速度
低于转矩指令
超出转矩指令
低于指定热负荷
超出指定热负荷
检测出±方向行程限制
正常
原点复位完成
原点确定
表
名称
2-13
:分配可控制输入输出的扩展功能
运行·程序运行暂停
按指定比例变更运行速度
关闭积分控制
启动原点复位运行
将位于原点附近这一状态输入
通知靠近目标位置
通知进入区域
通知位置偏差
通知速度
通知输出转矩指令
通知热负荷
通知±方向限制(软件·硬件)的检测状态
通知检测出警报或警告
通知复位完成,位于原点位置
通知已确定原点坐标
功能
— 2-22 —
Page 40

2.9.2. 接口规格(CN2)
2. 规格
2.9.2.1.
一般输入规格
适用输入:PI0~16(出厂时功能:SVON、EMST、OTP、OTM、ACLR、PRG0~7、RUN、JOG、DIR、STP)
表
2-14:CN2
项目 规格
输入电压
输入阻抗
输入电流 小于 10[mA](每点)
的一般输入规格
DC24[V]±10%
3.9[kΩ]
※
3.9kΩ
DC24
Ω
输入
驱动器端
560
※反转外部供给电源的极性,
也可连接为负电极·接地。
图
2-23:CN2
的一般输入规格
— 2-23 —
Page 41

2. 规格
2.9.2.2.
脉冲串输入规格
适用输入:CCWP+、CCWP−、CWP+、CWP−
项目 规格
输入电压
输入阻抗
输入电流 小于 25[mA]
输入+
输入-
(1) 与线路驱动器输出连接
表 2-15
:脉冲串输入
DC5[V]±10%
220[Ω]
220Ω
驱动器端
图 2-24:脉冲串输入
Ω
1K
请直接连接。
输入+
输入-
客户控制器端
图
2-25
:线路驱动器输出的连接图
(2) 与集电极开路输出的连接
请在客户端连接 68[Ω](1/8[W])的电阻。
+5V
68Ω
输入+
输入-
220Ω
1KΩ
驱动器端
220Ω
1KΩ
客户控制器端
驱动器端
图
2-26
:集电极开路输出的连接图
— 2-24 —
Page 42

2. 规格
2.9.2.3.
输出规格
适用输出:PO0〜7(出厂时功能:DRDY、WRN、OTPA、OTMA、SVST、BUSY、IPOS、NEARA)
表
2-16
项目 规格
最大开断能力
饱和电压
:输出规格
DC24[V]/50[mA]
小于2[V]
输出
~ +
※
COM
~ -
驱动器端
※
COM
两种极性
图
2-27
:输出规格
可连接为负极·接地、正极·接地
。
2.9.2.4.
位置反馈输出规格
适用输出:CHA、CHB、CHZ、*CHA、*CHB、*CHZ
项目 规格
输出形式 线路驱动器(CHA、CHB、CHZ、*CHA、*CHB、*CHZ)
使用线路驱动器 日本德州仪器株式会社制造 AM26C31 同等品
推荐线路接收器 日本德州仪器株式会社制造 AM26C32 同等品
表
2-17
CHA
CHB
CHZ
*CHA
*CHB
*CHZ
SGND
图
2-28
:位置反馈输出规格
驱动器端
:位置反馈输出规格
— 2-25 —
Page 43

2. 规格
2.9.2.5.
模拟监视器输出
适用输出:MON1、MON2
表
2-18
:模拟监视器规格
项目 规格
输出形式
最大输出电压
饱和电流
放大器
5[V]
小于4[mA]
-
MON1,2
GND
驱动器端
图
2-29
:模拟监视器规格
+
— 2-26 —
Page 44

2. 规格
2.10. CN3:
旋转变压编码器用接口
:
驱动器端连接器 Molex 制造 52986-1479
适用连接器(电机端) Molex 制造 54306-1419
适用外罩(电机端) Molex 制造 54331-0141
2.10.1. 引脚阵列(CN3)
请
连接专用
的电缆组。此外,由于电缆组是专用线,故不能切断或转接。
表
2-19:CN3
1
2
INC-B
4
−
6
ABS-B
INC-A
3
INC-C
5
ABS-A
7
ABS-C
适用连接器
※附带在
8
9
INCCOM
11
−
13
−
ABSCOM
10
−
12
−
14
FG
专用电缆组上
※
※
2.10.2. 信号名称列表(CN3)
引脚号 信号名称 内容
1 INC-A
2 INC-B
3 INC-C
5 ABS-A
6 ABS-B
7 ABS-C
8 ABS-COM
9 INC-COM
14 FG
:
请切勿对上述以外的引脚号进行接线。
:
请确认连接器的方向后插入。请拧紧连接器固定用螺钉,避免因振动等使连接器脱
落的情况。
:
驱动器接入电源后,请勿断开本连接器。
图
2-30:CN3
表
2-20:CN3
增量式旋转变压编码器信号 A 相
增量式旋转变压编码器信号 B 相
增量式旋转变压编码器信号 C 相
绝对式旋转变压编码器信号 A 相
绝对式旋转变压编码器信号 B 相
绝对式旋转变压编码器信号 C 相
绝对式旋转变压编码器
增量式旋转变压编码器
外壳接地
引脚阵列
信号名称列表
common
common
— 2-27 —
Page 45

2. 规格
2.11. CN4:
电机用接口
:
驱动器方连接器 WAGO 制造 232-268
适用连接器(电机端) WAGO 制造 231-638
2.11.1. 引脚阵列(CN4)
1
2
3
4
5
6
7
8
请连接专用的电缆组。由于电缆组是专用线,故不能切断或转接。
表
○
○
○
○
○
○
○
○
U
V
W
R+
R−
SE+
SE−
2-21:CN4
电机线 U 相
电机线
电机线
外置再生电阻连接端子
外置再生电阻连接端子
输入外置再生电阻用热传感器
输入外置再生电阻用热传感器
图
2-31:CN4
适用连接器
V 相
W 相
引脚阵列
※附带在
用上
专 电缆组
※
2.11.2. 信号名称(CN4)
引脚
编号
1 U
2 V
3 W
5
6
7
8
:
:
:
:R+,R−
表
2-22:CN4
信号名称
内容
电机线 U 相
电机线 V 相
电机线 W 相
R+ 外置再生电阻连接端子
R− 外置再生电阻连接端子
SE+ 输入外置再生电阻用热传感器
SE− 输入外置再生电阻用热传感器
驱动器接通电源后,请勿卸下本连接器。
接通电源后,本连接器带有高压。请注意避免发生短路等现象。
请确认连接器的方向后插入。连接器是自锁式,但是若不插入内部则无法锁住。
即使电源关闭后仍有高压输出。操作时请注意。
信号名称列表
※
不使用外置再生电阻时请短路这两端子后使用。
在
两端子间开路的情况下,出现报警 P0 : 过 热 。
※
※
— 2-28 —
Page 46

2. 规格
2.12. CN5:
电源用连接器
CN5 所使用的连接器及客户端连接器显示在「表 2-23
驱动器端连接器 WAGO 制造 231-565/001-000
适用连接器(客户端)
2.12.1. 引脚阵列(CN5)
2.12.2. CN5 连接方法
:
CN5 适用连接器」。
表
2-23:CN5
5
4
3
2
1
图
○
○
○
○
○
2-32:CN5
适用连接器
WAGO 制造
L
N
L
N
引脚阵列
控制电源
主电源
231-305/026-000
AC200V
CTRL
AC200-230V
MAIN
AC200-230V
AC100V
CTRL
AC100-115V
MAIN
AC100-115V
的情况下
的情况下
CN5
L
N
L
N
控制电源
单相 AC200V
主电源
单相 AC200V
CN5
L
N
L
N
控制电源
主电源
单相 AC100V
单相 AC100V
图
2-33:CN5
— 2-29 —
连接方法
Page 47

2. 规格
(空白页)
— 2-30 —
Page 48

目次
1. 前言 --------------------------------------------1-1
1.1. 安全事项 ----------------------------------------------------1-2
1.1.1. 安全事项的相关内容-----------------------------1-2
1.1.2. 使用注意事项--------------------------------------1-2
1.1.3. 兼容性 ----------------------------------------------1-5
1.2. 术语定义 ----------------------------------------------------1-6
2. 规格 --------------------------------------------2-1
2.1. 系统构成 ----------------------------------------------------2-1
2.1.1. 运行方式 -------------------------------------------2-1
2.1.2. 系统构成示例--------------------------------------2-2
2.2. 标称号构成 -------------------------------------------------2-4
2.2.1. PS 型电机标称号构成----------------------------2-4
2.2.2. 用于 PS 型电机的
2.2.3. 用于 PS 型电机的
2.2.4. 手持终端标称号构成-----------------------------2-4
2.3. 各部分名称 -------------------------------------------------2-5
2.3.1. PS 型电机各部分名称----------------------------2-5
2.3.2. EDC 型驱动器各部分名称 ----------------------2-6
2.3.3. 手持终端各部分名称-----------------------------2-8
2.4. 标准组合列表 ----------------------------------------------2-9
2.4.1. 驱动器与电机的匹配组合-----------------------2-9
2.4.2. 电缆组 -------------------------------------------- 2-10
2.4.3. 手持终端(用于输入参数、程序)--------- 2-10
2.5. 电机规格 -------------------------------------------------- 2-11
2.5.1. PS 型电机规格 ---------------------------------- 2-11
2.5.2. 对电机施加的负荷------------------------------ 2-12
2.6. 外形尺寸 -------------------------------------------------- 2-13
2.6.1. 电机外形尺寸------------------------------------ 2-13
2.6.2. EDC 型驱动器外形尺寸 ----------------------- 2-14
2.6.3. 电缆组外形尺寸--------------------------------- 2-16
2.6.3.1 固定电缆 ------------------------------------ 2-16
2.6.3.2 可动电缆 ------------------------------------ 2-16
2.7. 驱动器规格 ----------------------------------------------- 2-17
2.8. RS-232C 接口规格-------------------------------------- 2-18
2.8.1. CN1:RS-232C 规格
串行通信接口 ------------------------------------ 2-18
2.8.1.1. 引脚阵列(CN1) ---------------------- 2-18
2.8.1.2. 信号名称与功能(CN1)-------------- 2-18
2.9. 控制输入输出接口规格 -------------------------------- 2-19
2.9.1. CN2:用于控制输入输出的接口 ------------ 2-19
2.9.1.1. 引脚阵列(CN2) ---------------------- 2-20
2.9.1.2. 信号名称与功能(CN2)-------------- 2-21
2.9.2. 接口规格(CN2)------------------------------ 2-23
2.9.2.1. 一般输入规格 ---------------------------- 2-23
2.9.2.2. 脉冲串输入规格 ------------------------- 2-24
2.9.2.3. 输出规格 ---------------------------------- 2-25
型驱动器标称号构成 ----------------------2-4
EDC
电缆组标称号构成
--------2-4
2.9.2.4. 位置反馈输出规格 ---------------------- 2-25
2.9.2.5. 模拟监视器输出 ------------------------- 2-26
2.10. CN3:旋转变压编码器用接口 ----------------------2-27
2.10.1. 引脚阵列(CN3) ---------------------------- 2-27
2.10.2. 信号名称列表(CN3) ---------------------- 2-27
2.11. CN4:电机用接口 -------------------------------------2-28
2.11.1. 引脚阵列(CN4) ---------------------------- 2-28
2.11.2. 信号名称(CN4) ---------------------------- 2-28
2.12. CN5:电源用连接器 ----------------------------------2-29
2.12.1. 引脚阵列(CN5) ---------------------------- 2-29
2.12.2. CN5 连接方法---------------------------------- 2-29
3. 拆包·安装·接线 --------------------------3-1
3.1. 拆包 --------------------------------------------------------- 3-1
3.1.1. 现货检查 -------------------------------------------3-1
3.1.2. 确认电机机体与驱动器的匹配组合-----------3-1
3.2. 安装 --------------------------------------------------------- 3-2
3.2.1. 电机机体 -------------------------------------------3-2
3.2.1.1. 电机的安装场所·环境-------------------3-2
3.2.1.2. 安装电机 --------------------------------- 3-2
3.2.1.3. 负载的连接 ---------------------------------3-3
3.2.1.4. 检查使用条件 ------------------------------3-3
3.2.1.5. 虚拟惯性体 ---------------------------------3-4
3.2.2. 驱动器安装方法-----------------------------------3-5
3.3. 接线 --------------------------------------------------------- 3-6
3.3.1. 电缆组接线 ----------------------------------------3-6
3.3.2. 电源接线 -------------------------------------------3-7
3.3.3. 接地 -------------------------------------------------3-8
3.3.4. 连接器接线 ----------------------------------------3-9
3.3.4.1. 连接示例(CN2) ------------------------3-9
3.4. 接通电源 --------------------------------------------------3-10
3.4.1. 接通电源前的检查------------------------------ 3-10
3.4.2. 电源接通时的检查事项------------------------ 3-11
3.4.3. 输入端口的极性
(A 接点、B 接点)设定 --------------------- 3-12
3.4.4. 接通电源与伺服 ON --------------------------- 3-13
4. 手持终端的操作方法 -----------------------4-1
4.1. 状态确认 --------------------------------------------------- 4-2
4.2. 参数设定 --------------------------------------------------- 4-2
4.2.1. 输入密码 -------------------------------------------4-2
4.2.2. 重置为出厂默认值--------------------------------4-3
4.3. 读取参数 --------------------------------------------------- 4-3
4.3.1. 分组读取参数--------------------------------------4-4
4.3.2. 仅读取从出厂默认值已变更的参数-----------4-4
4.4. 状态监视器 ------------------------------------------------ 4-5
4.4.1. 监视多个状态的同时输入命令-----------------4-5
— i —
Page 49

5. 调整 --------------------------------------------5-1
5.1. 调整步骤 ----------------------------------------------------5-1
5.2. 调整级别 1:自动调整-----------------------------------5-2
5.2.1. 调整时的注意事项--------------------------------5-3
5.2.2. 伺服参数初始化-----------------------------------5-4
5.2.3. 执行自动调整--------------------------------------5-5
5.2.4. 试运行 ----------------------------------------------5-7
5.3. 调整级别 2:伺服增益调整-----------------------------5-9
5.3.1. 输入负载惯量--------------------------------------5-9
5.3.1.1. 未知负载惯量时 ---------------------------5-9
5.3.2. 微调伺服增益------------------------------------ 5-10
5.4. 调整级别 3:手动调整---------------------------------5-13
5.4.1. 准备手动调整------------------------------------ 5-13
5.4.2. 速度环比例增益:调整 VG------------------- 5-13
5.5. 调整滤波器(调整级别 2)---------------------------5-15
5.5.1. 调整低通滤波器--------------------------------- 5-15
5.5.2. 调整陷波滤波器--------------------------------- 5-16
6. 运行 --------------------------------------------6-1
6.1. 运行准备 ----------------------------------------------------6-1
6.1.1. 确认事项 -------------------------------------------6-1
6.1.2. 运行步骤 -------------------------------------------6-1
6.2. 设定坐标系 -------------------------------------------------6-2
6.2.1. 坐标分辨率-----------------------------------------6-2
6.2.2. 坐标方向 -------------------------------------------6-3
6.2.3. 设定坐标原点--------------------------------------6-4
6.2.4. 软行程限制-----------------------------------------6-6
6.2.4.1. 通过示教设定 ------------------------------6-7
6.2.4.2. 通过坐标数据设定 ------------------------6-8
6.3. 运行 ----------------------------------------------------------6-9
6.3.1. 定位命令 -------------------------------------------6-9
6.3.2. 程序运行 ----------------------------------------- 6-10
6.3.2.1. 通过 I/O 运行程序 --------------------- 6-11
6.3.2.2. 通过 RS-232C 运行程序--------------- 6-13
6.3.2.3. 编程 ---------------------------------------- 6-14
6.3.2.4. 程序序列 ---------------------------------- 6-19
6.3.3. 脉冲串输入定位--------------------------------- 6-22
6.3.3.1. 脉冲串输入方式 ------------------------- 6-24
6.3.3.2. 脉冲串分辨率 ---------------------------- 6-25
6.3.3.3. 输入的时序 ------------------------------- 6-26
6.3.4. JOG 运行 ----------------------------------------- 6-27
6.3.4.1. 通过 I/O 进行 JOG 运行 ------------- 6-28
6.3.4.2. 通过 RS-232C 进行 JOG 运行 ------- 6-29
6.3.5. 通过 RS-232C 通信指令定位 ---------------- 6-30
7.1.3. 硬行程限制输入:OTP
7.1.4. 伺服 ON 输入:SVON --------------------------7-4
7.1.5. 启动程序输入:RUN,
选择内部程序·通道 PRG0~7------------------7-6
7.1.6. 运行停止输入:STP-----------------------------7-7
7.1.7. JOG 运行:JOG,JOG 运行方向 DIR-------7-9
7.2. 控制输出 --------------------------------------------------7-10
7.2.1. 驱动器准备完成输出:DRDY --------------- 7-10
7.2.2. 警告输出:WRN ------------------------------- 7-10
7.2.3. 行程限制检测输出:OTPA・OTMA------- 7-11
7.2.4. 伺服状态输出:SVST------------------------- 7-13
7.2.5. 运行中输出:BUSY --------------------------- 7-14
7.2.6. 定位完成输出:IPOS ------------------------- 7-15
7.2.6.1. CFIN 模式(参数 FW<0) ----------- 7-16
7.2.6.2. IPOS 模式(参数 FW=0) ----------- 7-17
7.2.6.3. FIN 模式(参数 FW>0)-------------- 7-18
7.2.6.4. 参数 IN:定位完成检测值 ------------- 7-19
7.2.6.5. 参数 IS:定位稳定确认计时器 ------- 7-19
7.2.7. 检测出靠近目标位置
输出:NEARA,NEARB---------------------------7-20
7.2.8. 位置反馈信号------------------------------------ 7-21
7.2.8.1. 位置反馈信号分辨率 ------------------- 7-22
7.2.8.2. 输出时序 ---------------------------------- 7-24
7.3. RS-232C 监视器 -----------------------------------------7-25
7.3.1. 控制用输入输出信号的监视方法------------ 7-26
7.3.1.1. 监视电气状态:监视器 IO0----------- 7-27
7.3.1.2. 监视内部的识别状态:监视器 IO1-- 7-28
7.3.1.3. 监视输入功能的状态:监视器 IO2-- 7-28
7.3.1.4. 监视输出功能的状态:监视器 IO3-- 7-29
7.3.1.5. 监视各个功能 ---------------------------- 7-29
7.3.2. 监视警报内容------------------------------------ 7-30
7.3.2.1. 一次性监视所有已出现的警报-------- 7-30
7.3.2.2. 监视警报的发生履历与
事件:TA/HI---------------------------- 7-31
7.3.3. 监视脉冲串计数器:监视器 RP------------- 7-32
7.3.4. 监视位置反馈坐标:监视器 FK ------------- 7-32
7.3.5. 监视当前位置:监视器 TP ------------------- 7-32
7.3.6. 监视软过热负荷量:监视器 TJ------------------7-33
7.4. 模拟监视器 -----------------------------------------------7-34
7.4.1. 使用已预置的监视器--------------------------- 7-35
7.4.2. 自定义监视内容--------------------------------- 7-36
7.4.2.1. 模拟监视控制输入输出功能状态----- 7-37
OTM-----------------7-3
・
7. 基本功能 --------------------------------------7-1
7.1. 控制输入 ------------------------------------------------------7-1
7.1.1. 紧急停止输入:EMST --------------------------7-1
7.1.2. 解除警报输入:ACLR ---------------------------7-2
— ii —
Page 50

8. 高级功能 --------------------------------------8-1
8.1. 控制功能输入输出的功能分配 -------------------------8-1
8.1.1. 控制输入功能--------------------------------------8-2
8.1.2. 控制输出功能--------------------------------------8-4
8.1.3. 编辑控制输入输出的功能-----------------------8-6
8.1.3.1. 编辑控制输入 ------------------------------8-6
8.1.3.2. 编辑控制输出 ------------------------------8-8
8.1.3.3. 屏蔽控制输入输出功能----------------- 8-10
8.1.3.4. 控制输出端口的强制输出-------------- 8-11
8.2. 扩展控制输入 -------------------------------------------- 8-12
8.2.1. 运行暂停输入:HLD--------------------------- 8-12
8.2.2. 限速倍率输入:ORD-------------------------- 8-13
8.2.3. 关闭积分控制输入:IOFF-------------------- 8-14
8.2.4. 启动原点复位运行:HOS -------------------- 8-15
8.2.5. 原点限制输入:HLS--------------------------- 8-15
8.3. 扩展控制输出 -------------------------------------------- 8-16
8.3.1. 区域输出:ZONEA,ZONEB,ZONEC-- 8-16
8.3.2. 各种状态输出------------------------------------ 8-17
8.3.2.1. 低于指定位置偏差输出:TEU,
超出指定位置偏差输出:TEO ------- 8-18
8.3.2.2. 低于指定速度输出:TVU,
超出指定速度输出:TVO ------------- 8-19
8.3.2.3. 低于指定转矩指令输出:TTU,
超出指定转矩指令输出:TTO-------- 8-19
8.3.2.4. 低于指定热负荷输出:TJU,
超出指定热负荷输出:TJO----------- 8-20
8.3.3. ±行程限制检测输出:OTXA---------------- 8-21
8.3.4. 正常输出:NRM-------------------------------- 8-22
8.3.5. 原点复位完成:HOME------------------------ 8-22
8.3.6. 原点确定:HCMP------------------------------ 8-22
8.4. 示教 -------------------------------------------------------- 8-23
8.4.1. 示教准备 ----------------------------------------- 8-24
8.4.2. 参数的示教--------------------------------------- 8-24
8.4.3. 通道内定位坐标的示教------------------------ 8-25
8.5. 调整 -------------------------------------------------------- 8-26
8.5.1. 伺服方块图--------------------------------------- 8-26
8.5.2. 数字滤波器--------------------------------------- 8-28
8.5.3. 位置环无反应区--------------------------------- 8-29
8.5.4. 自动增益切换------------------------------------ 8-30
8.6. 定位运行 -------------------------------------------------- 8-31
8.6.1. 凸轮曲线驱动与个别设定加减速度--------- 8-31
8.6.2. 凸轮曲线驱动与加减速度个别设定示例--- 8-33
8.6.3. 就近定位 ----------------------------------------- 8-34
8.6.4. 根据用户单位定位------------------------------ 8-36
8.7. 程序运行 --------------------------------------------------8-39
8.7.1. 通过程序运行变更参数------------------------ 8-39
8.7.2. 接通电源时自动执行程序--------------------- 8-41
8.8. 原点复位运行 --------------------------------------------8-45
8.8.1. 使用原点限制的原点复位运行--------------- 8-46
8.8.1.1. 原点复位模式:OS4 ------------------- 8-46
8.8.1.2. 原点复位模式:OS5 ------------------- 8-48
8.8.1.3. 原点复位模式:OS1 ------------------- 8-48
8.8.1.4. 原点复位模式:OS3 ------------------- 8-48
8.8.2. 使用行程限制的原点复位运行--------------- 8-49
8.8.2.1. 原点复位模式:OS7 ------------------- 8-49
8.8.3. 原点示教 ----------------------------------------- 8-51
8.8.3.1. 原点复位模式:OS6 ------------------- 8-51
8.8.3.2. 伺服 OFF 下的原点示教 --------------- 8-52
8.8.4. 调整限位传感器的位置------------------------ 8-53
8.8.5. 原点偏移量的示教------------------------------ 8-54
8.9. RS-232C 通信--------------------------------------------8-55
8.9.1. 通信规格 ----------------------------------------- 8-55
8.9.2. 通信方法·步骤--------------------------------- 8-55
8.9.2.1. 接通电源 ---------------------------------- 8-55
8.9.2.2. 参数设定与执行运行 ------------------- 8-56
8.9.2.3. 输入途中修改命令 ---------------------- 8-57
8.9.2.4. 密码输入 ---------------------------------- 8-57
8.9.2.5. 读取设定值与状态 ---------------------- 8-58
8.9.2.6. 分组读取参数设定 ---------------------- 8-59
8.9.2.7. 错误响应 ---------------------------------- 8-60
8.9.3. 使用计算机通信--------------------------------- 8-61
8.9.3.1. 超级终端的设置 ------------------------- 8-61
8.9.3.2. 备份参数 ---------------------------------- 8-62
8.9.3.3. 还原参数 ---------------------------------- 8-63
9. 命令/参数解说 -------------------------------9-1
9.1. 命令规则 --------------------------------------------------- 9-1
9.1.1. 命令字符串 ----------------------------------------9-1
9.1.2. 命令语法 -------------------------------------------9-1
9.1.3. 出现错误时的显示--------------------------------9-2
9.1.4. 多语句 ----------------------------------------------9-2
9.1.5. 读取通配符 ----------------------------------------9-3
9.1.6. 重复显示 -------------------------------------------9-3
9.1.7. 多通道监视器--------------------------------------9-4
9.1.8. 重置指定参数--------------------------------------9-4
9.1.9. 调节 -------------------------------------------------9-5
9.1.10. 模拟监视器输出 ---------------------------------9-5
9.2. 命令解说 --------------------------------------------------- 9-6
9.3. 参数一览 --------------------------------------------------9-85
— iii —
Page 51

10. 维护与修理--------------------------------10-1
10.1. 事前准备 ------------------------------------------------10-1
10.2. 保存 ------------------------------------------------------10-1
10.3. 定期检查 ------------------------------------------------10-2
10.3.1. 电机部 ------------------------------------------- 10-2
10.3.2. 驱动器部(包括电缆和手持终端) ------- 10-2
10.4. 定期更换 ------------------------------------------------ 10-3
10.4.1. 电机部 ------------------------------------------- 10-3
10.4.2. 电缆部 ------------------------------------------- 10-3
10.4.3. 驱动器 ------------------------------------------- 10-4
10.5. 关于修理 ------------------------------------------------10-6
10.6. 保证期间与保证范围 ---------------------------------10-7
10.6.1. 保证期间 ---------------------------------------- 10-7
10.6.2. 保证范围 ---------------------------------------- 10-7
10.6.3. 免责事项 ---------------------------------------- 10-7
10.6.4. 服务范围 ---------------------------------------- 10-7
10.6.5. 生产终止的发布,
生产终止后的维护维修对应期间 ---------- 10-7
11. 警报、警告--------------------------------11-1
11.1. 警报、警告的区别方法 ------------------------------11-1
11.1.1. LED 显示器 ------------------------------------- 11-1
11.1.2. 确认警报、警告 ------------------------------- 11-2
11.1.3. 警报、警告履历 ------------------------------- 11-3
11.2. 警报、警告一览 ---------------------------------------11-5
11.2.1. 正常状态 ---------------------------------------- 11-5
11.2.2. 警报、警告状态 ------------------------------- 11-6
11.2.2.1. 警报--------------------------------------- 11-6
11.2.2.2. 警告--------------------------------------- 11-7
11.2.2.3. 超程限制 --------------------------------- 11-7
11.3. 警报、警告的原因与处理 ---------------------------11-8
11.3.1. CPU 停止 --------------------------------------- 11-8
11.3.2. A0:位置检测器异常 ------------------------- 11-8
11.3.3. A1:绝对位置异常 ---------------------------- 11-9
11.3.4. A2:电机断线---------------------------------- 11-9
11.3.5. A3:软过热 ------------------------------------11-10
11.3.6. A4:超速---------------------------------------11-11
11.3.7. A5:原点未确定------------------------------11-11
11.3.8. A7:旋转变压编码器过电流 ---------------11-12
11.3.9. A9:换向异常---------------------------------11-12
11.3.10. C0:超出位置指令·位置反馈异常-----11-13
11.3.11. C3:CPU 异常 ------------------------------11-13
11.3.12. E0:RAM 异常------------------------------11-14
11.3.13. E2:ROM 异常------------------------------11-14
11.3.14. E7:系统异常 -------------------------------11-15
11.3.15. E8:接口异常 -------------------------------11-15
11.3.16. E9:ADC 异常 ------------------------------11-15
11.3.17. F1:超出指定位置偏差 -------------------11-16
11.3.18. F2:软超程 ----------------------------------11-17
11.3.19. F3:硬超程 ----------------------------------11-18
11.3.20. F4:紧急停止 -------------------------------11-19
11.3.21. F5:程序异常 -------------------------------11-19
11.3.22. F8:自动调整出错 -------------------------11-20
11.3.23. P0:过热 -------------------------------------11-21
11.3.24. P1:主电源过电压 -------------------------11-21
11.3.25. P2:电机过电流 ----------------------------11-22
11.3.26. P3:控制电源电压下降 -------------------11-22
11.3.27. P5:主电源低电压 -------------------------11-23
11.3.28. P9:功率模块警报 -------------------------11-23
12. 故障检修-----------------------------------12-1
12.1. 确认各种情况-------------------------------------------12-1
12.2. 故障检修-------------------------------------------------12-1
12.2.1. 电源不通 ---------------------------------------- 12-2
12.2.2. 不运行 ------------------------------------------- 12-2
12.2.3. 振动、噪音、整定不良 ---------------------- 12-3
12.2.4. 位置偏移 ---------------------------------------- 12-3
12.2.5. 通信障碍 ---------------------------------------- 12-4
附录
附录 1:确认输入输出信号 ---------------------------------- A-1
附录 2:判断电机的好坏 ------------------------------------- A-5
附录 3:驱动器设定的备份·还原方法 ------------------- A-8
附录 3-1:使用手持终端 FHT21 的情况下 ----------A-8
附录 3-2:使用 PC 进行备份 -------------------------A-11
附录 3-3:手动备份 ------------------------------------A-14
附录 4:EDC 型驱动器更换步骤书 ---------------------- A-16
附录 5:再生电阻 -------------------------------------------- A-18
附录 6:RS-232C 通信电缆的接线 ---------------------- A-20
附录 7:EDC 型驱动器 参数·程序设定表 ------------ A-21
— iv —
Page 52

3. 拆包·安装·接线
3.1. 拆包
3.1.1. 现货检查
3.
拆包·安装·接线
(1)
(2)
(3)
电机本体
驱动器本体
电缆组(电机电缆组·旋转变压编码器电缆组)
3.1.2. 确认电机本体与驱动器的匹配组合
:
请检查贴在电机本体的铭牌与贴在驱动器正面的铭牌上的「电机系列号」·「电
机尺寸记号」·「最大输出转矩」是否一致?
REF.NO.
M-PS 1 006 KN002
电机系列号
电机尺寸记号
Type
图
最大输出转矩
3-1
:电机机体的铭牌
SERIAL NO.
PS1-11001
No.
出厂编号
电机系列号
电机尺寸记号
**
(版本不同,
可能有些没有记载)
图
最大输出转矩
3-2
:驱动器的铭牌
PS1-11020 EDC- PS 1 006 A B 5 02-
出厂编号
— 3-1 —
Page 53

3.
拆包·安装·接线
3.2. 安装
3.2.1. 电机本体
为了让您在使用时能充分发挥高性能 DD(直接驱动)电机 PS 型
以下几点:
3.2.1.1. 电机的安装场所·环境
请在无尘、无腐蚀性气体的室内使用。
请在周围温度为 0~40[℃]的环境下使用电机。
PS 型
请在避开水、油的环境下使用。
3.2.1.2. 安装电机
由于安装电机的机台的刚度较低,会引发机械性共振,请将电机固定安装在刚度较高的机台上。
Megatorque Motor
为非防尘、防水规格。(相当于 IP30)
Megatorque Motor
的性能,请注意
:
请使用电机底面的安装螺纹孔固定电机。
• 请将电机的安装面的平面度设为小于 0.02[mm]。
•
可水平安装或垂直安装电机。
(注)如下图的驱动构造中,由于出现振动而无法提高电机的速度环比例增益(VG),因此停止保持力会变低并出现超调
情况,电机不能平稳运行。在这种情况下,请采取以下措施:
直接将电机安装在电机转子上(或者添加虚拟惯性)
·
·
电机直接安装在机台上
负载没有直接安装在电机
转子上
电机没有直接安装
在机台上
工作台固定螺栓
工作台
Megatorque
Motor
机台
Megatorque
Motor
图
3-3
:安装电机
机台平面度小于
电机固定螺栓
负载
机台
0.02[mm]
:
请勿将电机电缆引出线,旋转变压编码器电缆引出线用于可移动部分。
请将引出线的弯曲半径设为大于
R30[mm]
。
— 3-2 —
Page 54

3.2.1.3. 负载的连接
3.2.1.4. 检查使用条件
在本
机的允许负载惯量」上显示每个电机尺寸的允许负载惯量。
电机型号
PS1006
PS1012
PS1018
PS3015
PS3030
PS3060
PS3090
:
使用
:
Megatorque Motor
PS3
•
请将要插入的销的公差设定为间隙配合。
•
插入销时,请勿给与电机过重的负载或冲击。
•
虽然销孔可用于在安装负载时的定位,但请勿用来保持负载。
安装负载时请使用转子的螺纹孔。请注意在安装时不要留有间隙。
•
请将拧紧螺栓的拧紧转矩设置为:
转子惯量[kg·m2]
3.
拆包·安装·接线
型的输出轴侧销孔时,请遵守以下事项:
PS1
型:小于
PS3
型:小于
系统中,负载的惯量与转子的惯量相比,为非常大的数值。在「表 3-1:电
表
3-1
:电机的允许负载惯量
0.0024 0.24
0.0031 0.31
0.0038 0.38
0.011 1.1
0.014 1.4
0.019 1.9
0.024 2.4
3.4[Nm](M4
7.8[Nm](M6
螺钉)
螺钉)
允许负载惯量[kg·m
(转子惯量×100)
2
]
:
请检查电机在可使用条件下的允许力矩负荷、允许轴向负荷、允许径向负荷。
•
有关各个电机的允许力矩负荷、允许轴向负荷、允许径向负荷的详情,请参照
「2.5. 电机规格」。
— 3-3 —
Page 55

3.
拆包·安装·接线
3.2.1.5. 虚拟惯性体
为了充分发挥直接驱动电机的特长,将电机牢牢地固定在有一定刚度的机构上的同时,需要提高电
机负载的刚度并且提高整个机构固有频率。因此,在如下构造的情况下,请在电机的转子上设计直
接安装的追加惯性体(虚拟惯性体)。
请将虚拟负载惯量的大小以负载惯量的 20%为大致基准。或者在负载上使用减速机时,以
①
不能直接连接在电机转子上,由键联结等相连接的情况。
②
负载虽是直接连接,但负载的轴发生扭曲,出现振动的情况。
③
由于负载为滚珠丝杆等原因,整个系统的惯性非常小。
④
由于在负载上使用了链条或者齿轮传动而存在游隙的情况。
为大致基准。
虚拟 惯 性 体
Megatorque
Motor
( 虚 拟 惯 性 体
的 安 装 例
)
负载
图
3-4
:虚拟惯性体的安装
— 3-4 —
Page 56

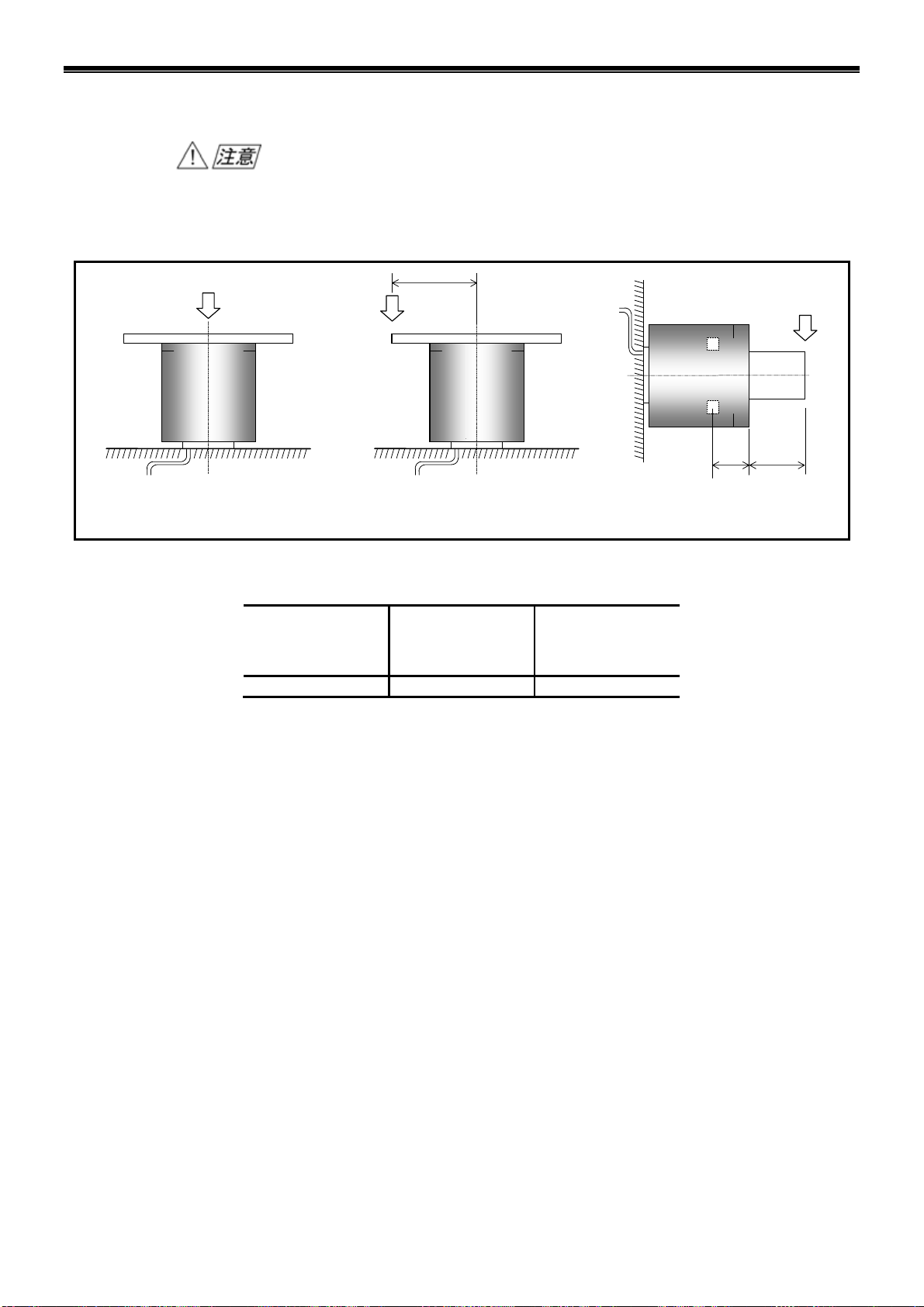
3.2.2. 驱动器安装方法
由于
EDC
3.
拆包·安装·接线
型驱动器采用空冷方式,请严格遵守纵向安装的要求,使得外壳金属散热片处于纵向方向。
: (1)
:
若存在多轴组合多个驱动器并列排放的情况,请勿使驱动器侧面贴紧,相互之间
隔开不小于
内置在电控箱时请将箱内温度设为 0~50[℃]之间。若经常出现警报PO:过热(参照「11. 警报、
警告」)时,通过风扇等强制使散热器冷却。
EDC 型驱动器通过选购五金配件,可以安装在面板上。
EDC 型驱动器的最大损耗为 55[W]。
环境温度
• 请在 0~50[℃]的环境下使用,超过 50[℃]的高温状态下无法使用本产品。电
控箱内,请在驱动器的上下部分留出 100[mm]以上的充足的空间。此外,若热
气在驱动器的上方停滞,请将电控箱上方面板对外开放(这种情况下需要防
尘),或者通过强制空气冷却等措施使之尽可能处于易散热的环境中。
(2)
防尘·防水
• 请在 IP54 以上的电控箱内使用。请从油雾、切削液、切粉、漆雾等环境中隔
离保护。若未进行防护,通过驱动器的气窗混入异物,可能会导致电路故障。
• IP 是按照 IEC 标准等规定的对固体异物和水的侵入的保护程度。
防止外来固体物的级别5
防水级别4:不受来自任何方向水沫的影响
10[mm]
的空隙。
:防尘型
100mm 以上
100mm 以上
图
3-5
:驱动器的安装
— 3-5 —
Page 57

3.
拆包·安装·接线
3.3. 接线
3.3.1. 电缆组接线
:
请勿切断后延长、缩短、转接电缆。若要进行变更,请另行购买所规定长度的电
缆组。
请从1~
:
请将电源系统(AC电源、电机电缆)与信号系统分开接线,请勿将其束成一束,
也不要在同一电缆槽中穿过。
:
若对电缆添加有明显振动,为了避免对连接器部分施加压力,请在靠近连接器附
近处固定电缆。
10[m](每米为 1 单位
)、15、20、
30m
中进行选择电缆组的长度。
至 CN3
至接地端子
CN4
至
图
3-6
:电缆组的接线
— 3-6 —
Page 58

3.3.2. 电源接线
单相 AC100,AC200[V]
3.
拆包·安装·接线
请参照「2.12.
对于电源用的电缆,请使用UL认证的耐热乙烯基
请将电源电缆与信号系统分开接线,请勿将其束成一束,也不要在同一电缆槽中穿过。
请将噪声滤波器的一次侧与二次侧分开接线,或者在不同的回路上进行接线。
请将噪声滤波器与驱动器尽可能近距离安置。
为防止出现噪声,请务必对电磁开关、继电器、螺线管等线圈插入浪涌吸收电路。详情请在各个制
造商的产品目录等中进行确认。
由于在主电源电路上连接了容性负载,电源接通时会产生瞬间起峰电流。因此,在电源线上接通电
磁开关等的接点时,请选定大于下述的额定电流。
电源 型号 额定电压 额定电流
CN5
:电源用连接器」。
表
3-2
:[参考]推荐噪声滤波器(夏弗纳
FN2070-10
AWG14
AC250[V] AC10[A]
EMC
电线。
制造)
项目
控制电源
主电源
表
3-3
:电源的分断能力
机器 额定
无熔丝断电器 额定电流 10[A]
漏电断电器 额定电流 10[A],感度 15[mA]
电磁开关 额定电流 10[A]
表
3-4:瞬间起峰电流
瞬间起峰电流
电源 AC100
:
7.5[A] 15[A] 10[ms]
接线时,请注意不要丢失接地端子的螺钉。
•
[V] 电源 AC200[V]
10[A] 20[A] 10[ms]
1.4[mArms](40〜100[Hz])
电源接线请参照「图 3-7:电源接线示例」。
(TYP.值)
表
3-5
:漏电电流
漏电电流(TYP.值)
时间
— 3-7 —
Page 59

3.
Y
拆包·安装·接线
3.3.3. 接地
AC
D
电源
接 地
种以上
驱动器的接地线请尽量使用较粗的导线,如平编铜线或超过
:
电机与机器之间处于绝缘状态下时请将电机接地。
:
接地为单点接地,请设定为D类(接地电阻小于
AWG12
100[Ω]
的导线等。
)。
旋转变压
驱动器
MC1
CN5
控制电源
主电源
CN3
CN4
ELB1
CB1
NF1
※
※
编码器
电
机
FG
CN2
输入输出信号
+24V
SW1 SW2
※
MC1
DRD
COM
RY1
※请单点接地
在伺服
MC1 RY1
NF
主机控制器
·脉冲串控制器
·可编程控制器
※
※
:
推荐使用下述噪声滤波器来对应
DC24V
图
3-7
• FN2070-10/07
+24V
GND
电源
:电源接线示例
EMC
(夏弗纳 EMC)同等品
指令。
(请使用欧洲安全标准认证的断路器)
:
请设置由警报输出控制来断开主电源的电路。
•
出现警报时,
ON
状态下,若断开主电源,会出现警告P5:主电源低压。
CN2的DRDY
输出:驱动器准备完成 将处于「开」状态。
※
ELB1
:漏电断路器
CB1
:无熔丝断路器
NF1
:噪声滤波器
MC1
:电磁开关
RY1
:继电器
SW1
:主电源ON开关
SW2
:主电源
OFF开关
◊
关于主电源的
◊
通过
ACLR
低压警报。
ON/OFF
的详情,请参照「7.1.4. 伺服ON输入:
SVON
」。
输入:解除警报、命令CL:解除 警 报 ,或者重新接通控制电源可以解除主电源
— 3-8 —
Page 60

3.3.4. 连接器接线
3.3.4.1. 连接示例(CN2)
3.
拆包·安装·接线
:
使用继电器等感应开关时,请务必加入浪涌吸收电路。
:
输入+方向行程限制、-方向行程限制时,不经由主机控制器,直接从客户已安装
的传感器的输出进行输入。
(图中
部)
反转电源极性,也可连接为
负电极·接地使用。
DC24V
DC5V
DC24V
反转电源极性,也可连接为
负电极·接地使用。
客户端控制器
伺服
紧急停止
解除警报
+方向行程限制
-方向行程限制
启动程序
停止
切换内部程序·通道 0
切换内部程序·通道 1
切换内部程序·通道 2
切换内部程序·通道 3
切换内部程序·通道 4
切换内部程序·通道 5
切换内部程序·通道 6
切换内部程序·通道 7
JOG 运行
JOG 运行方向
CW
脉冲串
CCW
脉冲串
驱动器准备完成
警报
检测出+方向行程限制
检测出-方向行程限制
ON
伺服
靠近目标位置
位置反馈信号
位置反馈信号 B 相
位置反馈信号 Z 相
状态
运行中
定位完成
A相
ON
A
信号用接地
EDC 型驱动器
CN2
1, 2 DC24
7 SVON
3 EMST
4 ACLR
5 OTP
6 OTM
8 RUN
9 STP
11 PRG0
12 PRG1
13 PRG2
14 PRG3
15 PRG4
16 PRG5
17 PRG6
18 PRG7
19 JOG
20 DIR
22 CWP+
23 CWP−
24 CCWP+
25 CCWP−
28 DRDY
29 WRN
30 OTPA
31 OTMA
32 SVST
33 BUSY
34 IPOS
35 NEARA
26, 27 COM
36 CHA
37 *CHA
38 CHB
39 *CHB
40 CHZ
41 *CHZ
43 SGND
FG
图
3-8:CN2
连接示例
— 3-9 —
Page 61

3.
拆包·安装·接线
3.4. 接通电源
3.4.1. 接通电源前的检查
:
作业人员请勿处在电机旋转范围内
:
电机旋转时周围无与之接触的物体
:
电机本体必须牢固地固定在机台上
:
负载必须牢牢地固定在电机上
:
由于错误连接,可能会导致驱动器受损。
①
检查各连接电缆的接线情况
②
连接手持终端
③
安全检查
:
请在电机处于静止状态下接通电源。若电机在旋转状态下接通电源,则无法正确
检测出坐标,出现警报
A1
:绝对位置异常。
— 3-10 —
Page 62

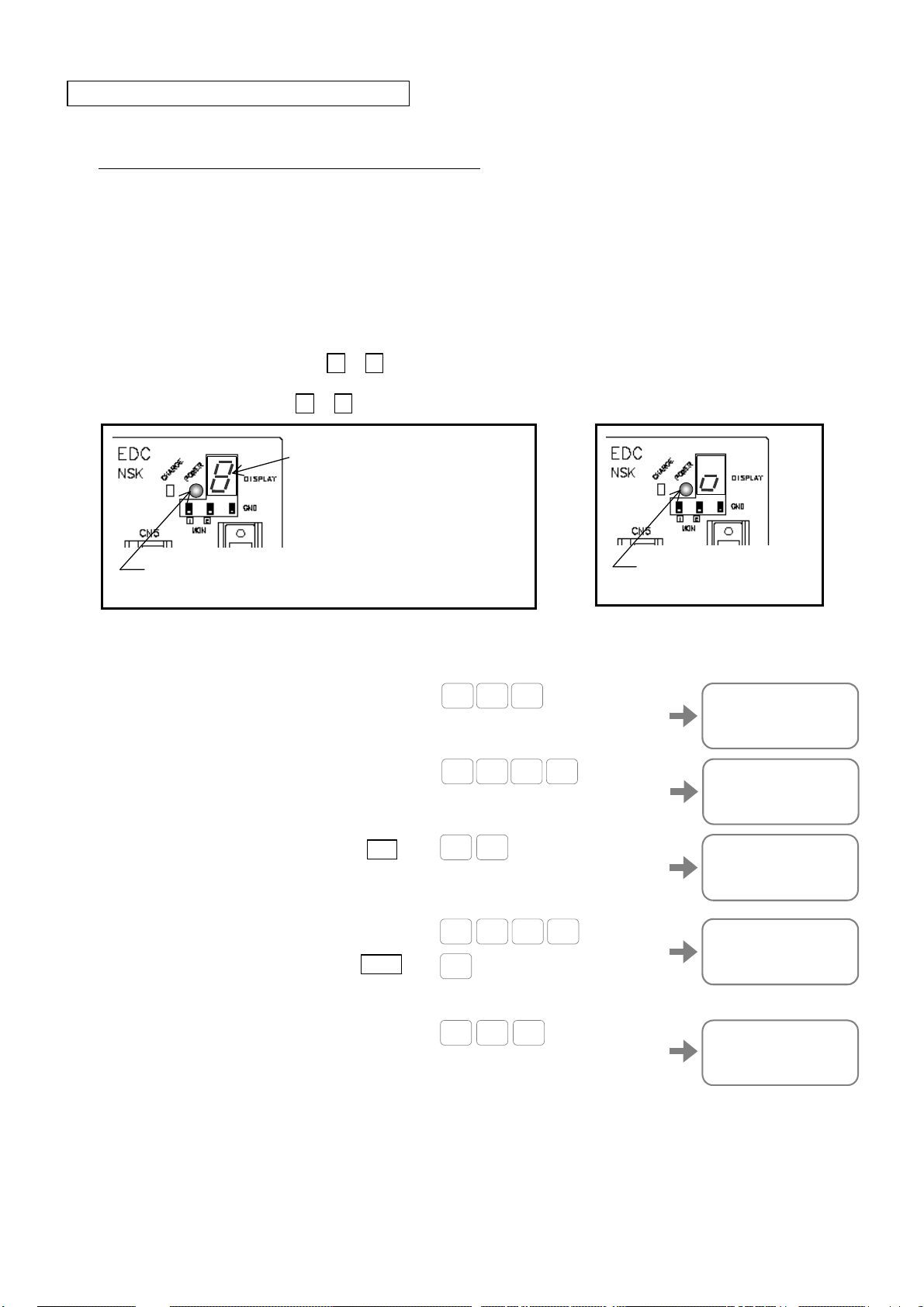
3.4.2. 接通电源时的检查事项
3.
拆包·安装·接线
(1)
电源 LED:接通电源后,亮灯。
正常:绿色
异常:橙色
(2)
接通电源并检查驱动器正面的 LED。
7 段 LED:显示警报内容。
警报一般以 2 位数显示,因此交错显示 2
个字符。
若出现 2 个以上的警报,依据不同的警报
依次进行上述显示。
图
3-9
请确认接口
◊
若输入紧急停止后,正面的7段
容时,请参照「11. 警报、警告」。
:出现警报时
CN2
的 3 号引脚的
:
EMST
紧急停止。
输入:紧急停止 出厂时为 B 接点规格。在未连接状态下,会出现警报 F4:
EMST
输入:紧急停止 是否有效。
LED
按
F → 4
的顺序变化。正面的7段
电源 LED:
正常:绿色
异常:橙色
接通电源后,亮灯。
图
3-10
:正常时
LED
显示其他内
请进行接线处理,或者遵照「3.4.3. 输入端口的极性设定(A 接点、B 接点)」
变更为 A 接点输入,解除警报。
(3)
:
OTP·OTM
报 F3:超程限制。
请进行接线处理,或者遵照「3.4.3. 输入端口的极性设定(A 接点、B 接点)」
变更为 A 接点输入,解除警报。
在手持终端上显示
“NSK MEGATORQUE”
NSK MEGATORQUE
XSY*****.*,XOP*
DC1A80_*****.*
:_
输入:行程限制 出厂时为 B 接点规格。在未连接状态下,则出现警
(冒号)”,则为正常。
图
信息后若显示提示符“:
* 部分因系统不同而有所差异。
3-11
:手持终端显示
— 3-11 —
Page 63

3.
拆包·安装·接线
3.4.3. 输入端口的极性(A 接点、B 接点)设定
CN2的EMST
默认设置为
按以下步骤可变更为A接点。
◊
输入:紧急停止、
B
接点。
:
电机处于伺服
服
要变更控制输入的设定,则输入命令MO:禁止伺服ON,使电机处于伺服
OFF
状态后进行变更。
OTP
ON
的状态下,无法变更控制输入端口的设定。请确认电机处于伺
输入:+方向行程限制、
OTM
输入:-方向行程限制 出厂
OFF
状态。
以下显示将
M
EMST
①
输入命令
P
显示
②
③要将输入接点变更为
参数 FN:输入功能 后每次按 SP
将显示参数 NW:振颤信号防止计时器、参数 AB:输入接点;然后显示符“
SP
输入后,再次显示提示符
ENT
O
输入设定为A接点的步骤:
PI0
:编辑控制输入功能
?
0
ENT
A
接点,输入参数 AB0。
SP
I
“
。
?”
,接着按 ENT
键,
:MO
:_
:PI0
FNEMST;
FNEMST;
AB1;
NW0.2
?_
键。
?”。
?
ENT
EMST
④输入命令 SV:允许伺服 ON,将电机恢复至允许伺服 ON 状态。
B
A
输入变成了A接点。
V S
在设定 OTP 输入为A接点时,输入命令 PI2,请按上述相同的步骤执行。
在设定 OTM 输入为
A
接点时,输入命令 PI3,请按上述相同的步骤执行。
0
ENT
ENT
— 3-12 —
?AB0
?
:
:SV
:_
Page 64

3.4.4. 接通电源与伺服 ON
3.
拆包·安装·接线
(1)
(2)
(3)
(4)
(5)
接通电源。
约 3 秒后,检查
若
DRDY
电机一旦处于伺服ON状态,
此后,请执行必要的运行指令。
DRDY
输出处于关闭状态,请开启
◊
若
DRDY
NG
输出:驱动器准备完成。
输出出现异常时,请参照「11. 警报、警告」并采取适当的措施。
SVST
驱动器端
默认设置
判断异常
SVON
输入:伺服ON。
输出:伺服状态 将处于关闭状态。
客户端
接通电源
计时器
OK
DRDY开 DRDY关
警报
开始伺服
ON
SVST
开
SVST关
电机运行
DRDY
检查
关
SVON
WRN
检查
关
SVST
检查
关
运行指示
开
警报处理
开
警告处理
开
图
3-12
:接通电源与伺服 ON的流程
— 3-13 —
Page 65

3.
拆包·安装·接线
控制电源
主电源
ON
OFF
ON
OFF
约 3 s
DRDY
输出
SVON
SVST
输入
输出
ON
OFF
关
开
确定
0.5 s min.
170 ms max.( 3.2 s max.)
1 ms max.
运行指令有效
SVON
开启
※
通电源后的第一次
开始运行指令。
输入:伺服
SVON
后,直到达到伺服ON状态最多需要 170
ON
输入时需要 3.2 秒)
.请检查
SVST
(仅接
[ms]
输出:伺服状态,并
图
3-13
:请在
若在
:接通电源与伺服 ON的时序
接通主电源后开启
SVON
•
•
输入呈开启的状态下断开主电源,会出现警报P5:主电源低压。
关于主电源的
ACLR 输入:解除警报
通过
ON/OFF
SVON
输入。此外,断开电源之前,请关闭
,请参照「7.1.4. 伺服
、命令
SVON
输入。
ON
输入:
SVON
」。
CL:解除警报,或者重新接通控制电源可
以解除主电源低压警报。
— 3-14 —
Page 66

4. 手持终端的操作方法
手持终端的功能
4. 手持终端的操作方法
z
只要连接至
EDC
各种监测。(无需设定通信速度等)
:
请在驱动器的电源断开的状态下,拔出·插入通信电缆(
手持终端的外形及各部分功能
型驱动器的
CN1
上,通过
RS-232C
通信就可以很方便地进行参数的设定、编程和
机身
LCD
数字键
代码键(右上方小字)
字母键
(显示画面)
CN1
)。
注释:
(1)SHIFT
( 2) BS :
( 3) SP :
( 4) ENT :
图
特殊代码键
SHIFT
:Shift 键
ESC
:Escape 键
CTRL :Ctrl 键(不使用)
BS
:退格键
SP
:空格键
ENT
:回车键
电缆部分
(
电缆长 3000
输入代码键时,边按住
:
再按数字键,将显示数字键右上方的小文字。
若输入错误,按BS键。
请在输入空格时使用。
输入各命令及参数后按回车键。
4-1
:手持终端
SHIFT键,
M-FHT21
的外形及各部分功能
)
(1)
注释
(不使用)
注释(2)
(3)
注释
(4)
注释
— 4-1 —
Page 67

4. 手持终端的操作方法
4.1. 状态确认
z
首先,按以下步骤确认是否可输入命令。
①
将手持终端连接至驱动器的
②
确认在手持终端上是否显示了提示符“:(冒号)”。(若未显示出提示,请重新按一次
键)
CN1
上,然后接通驱动器的电源。
ENT
4.2. 参数设定
z
ENT
例,确认和设定参数
①
确认参数MV当前的设定值。
输入
?+参数名称。
?
将参数MV设定为
②
输入参数名称+数值 。
M
MV
:旋转速度
M
V 0
ENT
V
0.5[s-1]。
=
?
.
的设定值。
%
5
ENT
:_
:?MV
MV1.000
:_
:MV0.5
:_
4.2.1. 输入密码
z
z
若显示了提示符,设定完成。
:
设定参数后,若要断开驱动器的电源,请确认显示了提示符“:”后再断开电源。
•
若在显示提示符“:”之前断开电源,下次接通电源时,可能会出现报警E2:
异常。
ENT
KN S /
ROM
对于部分的命令和参数,需要输入密码后才能进行设定和操作。
①
输入密码
显示表示收到密码的信息
数与执行命令。
每条命令正确输入后,密码失效,输入下一条命令时请再次重复输入此密码。
“/NSK ON”。
N
O
SP
“NSK ON
:/NSK ON
NSK ON
:_
”后,显示提示符“:(冒号)”。接着,可设定参
— 4-2 —
Page 68

4.2.2. 重置为出厂默认值
z
可以将已变更设定的参数重置为出厂默认值。关于重置出厂默认值,虽然可执行初始化命令,在此
对单个参数的重置方法进行说明。
z
例,将参数
输入参数名称+
MV
:旋转速度
/RS 。
恢复至出厂默认值。
4. 手持终端的操作方法
4.3. 读取参数
z
例,确认参数
①
确认参数VG当前的设定值。
输入
显示参数VG的数值,在句尾处显示“;(分号)”。
在句尾处显示“;”时,按
②
VG
:速度环比例增益
?+参数名称 。
V
?
SP
G
RV / M
的设定值。
ENT
ENT
S
SP
键将显示以下参数。
:MV/RS
:_
:?VG
VG0.50;_
:?VG
VG0.50;
VGL0.50
:_
读取完所有参数名开头字母包含“VG”的参数后,则返回至提示符“:”。
要中断读取,按
◊
BS
键。
— 4-3 —
Page 69

4. 手持终端的操作方法
4.3.1. 分组读取参数
z
虽驱动器上有很多参数,但可以通过命令
z
例,读取参数
TS
:读取设定值
◊
关于命令TS的详情,请参照「9. 命令/参数解说」。
VG
:速度环比例增益
的设定。
读取不同功能组别的参数。
①
从「9. 命令/参数解说」的命令TS的解说可得知,由于参数VG属于
#
T
S 1
ENT
:TS1
PG0.05;
最初显示参数
②
每次按
数次按
SP
PG
:位置环比例增益。
SP
键,将显示属于
SP
键,并搜索参数VG。
SP
…
TS1
的参数。
TS1
:
PG0.05;
PGL0.05;
VG0.50;_
要结束读取,请连续按
③
号)”读取结束。
BS
SP
键让其显示所有的参数。或者请按
BS
PG0.05;
PGL0.05;
VG0.50;
:_
TS1
,输入如下:
键,显示提示符“:(冒
4.3.2. 仅读取从出厂默认值已变更的参数
z
调整或设定驱动器的参数时,可以仅对被修改过的参数进行确认。
z
命令
TS0
是读取所有参数组
在此,使用命令
◊
在通过命令
输入
T D
ENT
每次按
TS
:读取设定值
TS0
TS+编号+/MD 。
SP
键,在属于
TS1~TS12
所读取的参数中,仅读取从出厂默认值已变更的参数。
?
的命令。
并确认已变更的参数。
/ S 0
M
TS0/MD
:
PG0.16;
VG4.13;
IN100;
TS0
的参数中显示已变更的参数。要中断读取,请按
BS
键。
— 4-4 —
Page 70

4.4. 状态监视器
z
在调整过程中,欲实时监测各种状态时使用。
z
例,通过监视器
TP
:读取当前位置(脉冲单位)来监视当前位置。
4. 手持终端的操作方法
◊ 输入监视器名称+
连续显示当前坐标。若按
4.4.1. 监视多个状态的同时输入命令
z
例,同时监视
可以称作为“多状态监视器”。
①
②
TP
:读取当前位置(脉冲单位)与TV:读取当前速度。像这种监视多个状态的功能
首先,在多状态监视器上登录监视器
输入监视器名称+
接着,在多状态监视器上登录监视器
/RP。
RP / T P
BS
/WW 。
WP / T W
ENT
:TP/RP
TP 1310720 _
键,中断连续显示并返回至提示符“:(冒号)”。
TP。
ENT
:TP/WW
TP 1310720
:_
TV
通过以上方法可以连续监视2种状态。在这种状态下,也可以输入命令。
z
要解除多状态监视器,输入命令
W C W
WV / T W
WWC
ENT
ENT
:解除多状态监视器。
:TP/WW
TP 1310720
TV/WW
:
_
:TV/WW
TP 1310720
TV 0.002
:_
TP 1310720
TV 0.002
WWC
:
:_
— 4-5 —
Page 71

4. 手持终端的操作方法
(空白页)
— 4-6 —
Page 72

5. 调整
为了您能够使用并充分发挥
5.1. 调整步骤
Megatorque Motor
:
请务必遵照本章节的步骤来调整伺服参数。若未进行调整就进行伺服ON操作,
可能会导致电机发振。
的性能,需要对伺服参数行进调整。
5. 调整
准备运行
接通电源
5.2.2.
伺服参数初始化
自动调整
YES
5.2.3.
自动调整
YES
5.2.4
调整级别 1
自动调整的基本功能。
通过此操作,若运行顺利,则调整结束。
执行自动调整
成功
. 试运行
NO
NO
进行电机的安装、驱动器的接线等。
:
请检查驱动器正面的
LED
接通驱动器的电源后请检查是否在手持终端上显示如下图
5.3.1.
的信息。
输入负载惯量
NSK MEGATORQUE
XSY*****.*,XOP*
DC1A80_*****.*
:_
调整级别 2
在级别 1 调整不够充分时的追加调整
显示是否为
(正常)。
OK
运行
YES
试运行结束
NO
5.3.2
. 微调伺服增益
YES
5.5.
OK
运行
NO
调整过滤器
?行OK
YES
NO
调整级别 3
无法通过级别 1、2 调整时,需要进行一
般的手动调整。
5.4.
YES
手动调整
运行
OK
NO
图
5-1
:调整步骤
— 5-1 —
Page 73

5. 调整
5.2. 调整级别 1:自动调整
:
使用自动调整功能时,请确认是否满足下述条件:
•
•
•
•
•
负载惯量是否在电机允许负载惯量的范围之内。
(请参照「3.2.1.4.
检查使用条件」)
是否水平放置电机。(电机未受到重力等外力的压迫)
负载及电机安装支架的机械刚度是否足够高。
齿轮、联轴器等是否有背隙或松散。
负载所受的摩擦是否较小。
若未满足上述条件时,请执行「5.3. 调整级别 2:微调伺服增益」。
运行准备
使用自动调整功能时,需要准备下述项目:
夹具
(负载惯量)
电机
安装支架
◊ 安装
◊
◊
◊
◊
◊
◊
◊
电机机体(参照「3.2.1.2. 安装电机」)
向输出轴安装负载(参照「3.2.1.3. 负载的连接」 )
安装驱动器(参照「3.2.2. 驱动器安装方法」)
驱动器电机接线(使用 NSK 制造的电缆组)(参照「3.3.1. 电缆组接线」)
连接手持终端
AC
电源接线(参照「3.3.2. 电源接线」)
EMST
输入:紧急停止 的接线(
为了调试后的试运行,进行
电缆组
CN4
CN3
器接线」)
CN2
)(参照「3.3.4. 连接器接线」)
SVON
CN1
CN5
控制电源
PE
DC24 1,2
SVON 7
CN2 EMST 3
OTP 5
OTM 6
输入:伺服ON
主电源
CTRL
MAIN
的接线(
CN2
手持终端
NSK
#
&
DC24V
内部为用于行程限制的传感器
)(参照「3.3.4. 连接
HANDY TERMINAL
>
3 <2 $1
- +5 %4
)
8 (7 ‘6
. =0 ?9
CBA FED
IHG LKJ
ONM RQP
UTS XWV
?ZY */,
CTRLESCSHIFT ENTSPBS
电源
AC
AC电源
(外部供给电源)
图
5-2
:自动调整运行准备的参考图
— 5-2 —
Page 74

5.2.1. 调整时的注意事项
5. 调整
:
执行自动调整之前,
OTP· OTM
止。
:
在执行自动调整中,为了推断出负载惯量,将电机旋转±20[°]。为防止危险,
输入:行程限制 进行接线,一旦陷入危险的状态时必须能够立即停
请勿站立在旋转范围内。
:
若负载的刚度不够,执行自动调整后,电机可能会出现振动。在这种情况下,请
按以下方法将电机伺服
•
关闭
EMST
•
关闭
SVON
•
切断驱动器的电源
EMST
输入:紧急停止 及存在有禁止旋转的区域时必须对
OFF
。重新调整时,提高负载的刚度或者执行手动调整。
输入:紧急停止 (出厂时设定为B接点时)
输入:伺服ON
(出厂时设定为A接点时)
— 5-3 —
Page 75

5. 调整
5.2.2. 伺服参数初始化
出厂时已进行了参数初始化。因此,购买后不需要立即进行此项作业。
①
②
请关闭
CN2
:控制输入输出接口 的
SVON
输入:伺服ON。
执行命令TS:读取设定值 并读取伺服参数。
执行命令
TS1。
SP
S 1 # T
SP
最初显示参数PG:位置环比例增益。
由于每次按
③
按照与②相同的方法,执行命令
SP
④
输入密码。显示收到密码的信息。
O
⑤
输入命令
SP
S 2 $ T
SP
N
SI
:伺服参数初始化。
开始参数的初始化
S
I
ENT
…
键会显示属于
ENT
…
KN S /
ENT
ENT
SP
TS1
的参数,请记录好设定值。
TS2
同样记录好设定值。
结束初始化后,显示提示符“:(冒号)”。
:TS1
PG0.05;
TL100.00;
GP0;
:
TS2
FO0.000_
:
/NSK ON
NSK ON
:_
/NSK ON
:
NSK ON
:SI
:_
表
5-1
:伺服参数列表
通过 TS1 读取 通过 TS2 读取
参数 默认值 设定值 参数 默认值 设定值
PG※1
PGL
0.05
0.001
0.05
0.001
VG※1
VGL
FQ
LG
LB
TL
GP
GT
※
2
※
3
※
2
※
3
※
2
0.50
※
3
1.50
※
2
0.50
※
3
1.50
10
50.00
0.00
100.00
0
0.0
− − −
FO
FP※1
FS※1
NP※1
NPQ
NS
NSQ
DBP
BL
FF
ZF
※1: 通 过 调整级别 1、2 调整的参数。
※2: 在 驱动器标称号的末尾没有“-A”时
※3: 在 驱动器标称号的末尾有“-A”时
0.000
0
0
0
0.25
0
0.25
0
100.00
1.0000
1
— 5-4 —
Page 76

5.2.3. 执行自动调整
通过自动调整功能推算出固定在电机的负载的惯量值,根据负载自动设定以下所示的伺服相关参数。
表
5-2
:通过自动调整自动设定的伺服参数
参数 说明
LO
SG
PG
VG
FP
FS
: ・
请将环境设定为,即使电机旋转一周也不会出现安全问题的状态。
・
由于夹具构造上的关系,若无法旋转一周,请确保电机处于至少可旋转±
负载惯量值
伺服增益
位置环比例增益
速度环比例增益
第 1 低通滤波器频率
第 2 低通滤波器频率
的状态。此时,在禁止旋转区域中,请务必设置
OTP·OTM
5. 调整
20[
°]
输入:行程限制。
①请检查驱动器正面的
入命令AT:自动调整。
②输
若显示“
◊
警告发生,然后重新执行命令。
输入“OK”,开始自动调整。
③
负载惯量的推算过程中,电机自动进入伺服ON的状态,电机旋转 10~20[°]。
:
若推算负载惯量正常结束,
④
则如下述画面显示参数
(LO的数值因负载惯量的状态不同而有所差异。)
T
A
COND.MISMATCH?
K
O
当正在推算负载惯量时,若按
ENT
ENT
LED
显示是否为 (
LO
:负载惯量。
正常)。
:
:AT
AT Ready OK
?_
”时,请检查是否有
:AT
AT Ready OK
?OK
TO ABORT,PUSH [BS]
BS
键,则中止推算,无法更新伺服参数。
STP
:停止运行 的输入,或者警报、
— 5-5 —
AT Ready OK
?OK
TO ABORT,PUSH [BS]
LO*****;
负载惯量推算值
Page 77

5. 调整
?
在显示了负载惯量推算值的状态后,每次输入SP键,可以确认由自动调整所设定的伺服
⑤
参数。
按
BS 键
时则中断显示,返回至提示符“:(冒号)”的显示。
SP
SP
:
在执行自动调整中,若显示了下表所示的错误信息,请参照「11. 警报、警告」
进行处理。
出现自动调整错误时,驱动器前面的显示
终端显示 说明
POSITION OVER?
OVER INERTIA WRN.?
CAN’T TUNE?
ALARM DETECTED?
CANCELED?
…
表
5-3
:自动调整错误信息列表
调整中旋转超过±28.8[°]
装载惯性过大。
请参照「3.2.1.4. 检查使用条件」,
检查是否在允许负载惯量以内。
无法调整
检测出其他警报
操作被用户取消
OK
TO ABORT,PUSH [BS]
LO0.003;
SG6;
PG0.12;
VG1.29;
FP480;
FS480;
:_
LED
显示F8。
— 5-6 —
Page 78

5.2.4. 试运行
应用
:
请将环境设定为,即使电机旋转一周也不会出现安全问题的状态。
EDC
型驱动器的运行演示程序进行调整确认。
①
请确认
行程限制
②
开启
ON
CN2
:控制信号输入输出接口 的
中没有信号输入
CN2
的
的状态。
SVON
。
输入:伺服ON,并输入
EMST
输入:紧急停止、
命令SV:
5. 调整
OTP·OTM
允许伺服ON,使电机处于伺服
输入:硬
S
③请检查驱动器正面的
试运行时,将参数MV:旋转速度 降低为
④
M 1
⑤显示运行演示程序的菜单画面。
显示运行演示程序。
⑥按 SP
键,显示至运行演示程序末尾。
ENT
V
LED
显示是否为 (正常)。
?
V 0
P / S J
=
.
A
#
ENT
ENT
0.1[s-1]。
:
:
:SV
:_
:
:
:MV0.1
:_
:
:
:SP/AJ
0>ID9000;_
所显示的程序内容如下:
(变更程序时,请参照「
ID9000
TI500.0
ID-9000
TI500.0
JP256
…
:CW方向(参数
:
500[ms]
:CCW
:
500[ms]
:跳转至
SP
SP
6.3.2.3.
的暂停计时器
方向(参数
的暂停计时器
256
通道(通过
— 5-7 —
编程」)
DI1
时为
DI1
时为
2>ID-9000;
3>TI500.0;
4>JP256;
?_
CCW
CW
SP/AJ
所启动的通道)的前面
方向)旋转
方向)旋转
90[°]
90[°]
Page 79

5. 调整
若运行演示程序显示结束,显示“?”。在这种状态下,若按
⑦
运行演示程序。
ENT
4>JP256;
5?
SP/AJ Ready OK
?_
显示的运行演示程序若没有问题,请输入“OK”。
⑧所
O
K
ENT
5?
SP/AJ Ready OK
?
OK
:>_
输入的同时,电机开始
(最初往
不执行往返运行就停止运行演示程序时,只要在“?”后按
◊
“
CANCELED?
CW
方向上运行。)
”,然后等待正常的指令输入。
CW/CCW
的往返运行。
ENT
ENT
键,将显示确认准备
键。将显示
⑨确
认调整结束后,输入命令MS:停止运行,停止电机运行。
M
S
ENT
:>
:>
:>
MS
:>_
工作若正常,则调整结束。
工作不稳定时,请执行「5.3.2. 微调伺服增益」或者「5.4. 调整级别 3:手动调整」。
确认电机稳定工作后,请结合客户所使用的旋转速度设定参数MV。
— 5-8 —
Page 80

5.3. 调整级别 2:伺服增益调整
5.3.1. 输入负载惯量
通过正确设定负载惯量,可以抑制摩擦与其他干扰等影响以及提高追踪指令的性能。
5. 调整
通过参数LO:负载惯量 设定负载惯量。单位为
例,负载惯量为
5.3.1.1. 未知负载惯量时
[kg·m
:
若通过自动调整(调整级别 1)无法推算出参数LO时,请务必设定参数
•
由于形状复杂,事前若无法计算出负载惯量,请参照「5.3.1.1. 未知负载惯量时」
进行调整。
0.123[kg·m2]
①
输入密码。显示收到密码的信息。
N
O
时,输入如下:
KN S /
ENT
SP
2
]。
:/NSK ON
NSK ON
:_
②输入负载惯量的值。
ENT
?
.= O 0
L 1
3 <
2 $
#
:/NSK ON
NSK ON
:LO0.123
:
LO。
事前若难以计算出负载惯量,请参考「表 5-4:负载惯量设定的大致基准」暂且设定负载惯量的值。
表
5-4
电机型号
PS1006
PS1012
PS1018
PS3015
PS3030
PS3060
PS3090
:负载惯量设定的大致基准
负载惯量设定值(参数 LO)
小惯量
0.020 0.050 0.100
0.040 0.100 0.200
0.060 0.150 0.300
0.040 0.120 0.250
0.100 0.250 0.500
0.200 0.500 1.000
0.300 0.750 1.500
中惯量
[kg·m
2
]
大惯量
— 5-9 —
Page 81

5. 调整
5.3.2. 微调伺服增益
在以下所示的情况下执行伺服增益微调。
通过参数SG:伺服增益 微调伺服增益。
通过伺服增益的微调,可以自动设定「表 5-5:通过伺服增益微调(调整参数SG)可自动设定的伺
服参数」上所示的伺服相关参数。
:
请将环境设定为,即使电机旋转1周也不会出现安全问题的状态。
◊
通过命令AT:自动调整(调整级别 1)无法获得满意的运行状态时。
◊
直接输入了参数LO:负载惯量 时。
◊
参数SG的数值越大,响应性也越好。但是SG过大容易导致电机振动。
表
5-5
:通过伺服增益调整(调整参数 SG)可自动设定的伺服参数
参数 说明
PG
VG
位置环比例增益
速度环比例增益
若进行了自动调整后,根据推算出的负载惯量可以自动设定参数SG的值。请从已自动设定的值开始
微调参数
未进行自动调整或者因出现错误而未完成自动调整时,请进行以下设定后开始微调。
SG
。
:
按照「5.3.1. 输入负载惯量(调整级别 2)」设定了参数LO时,无法自动设定
SG
参数
为“
①
设定伺服增益。
S
数次按
②
将低通滤波器设定为
F 0
、参数FP:第 1 低通滤波器。将参数SG设定为“
FP200
G 5
SP SP
SP
键,使之显示提示符“:(冒号)”。
P 0
”后,请开始微调。
%
ENT
200[Hz]。
?
?
2
$
ENT
:
:
:SG5
PG0.10;_
:
:
:FP200
:_
SG5
”,参数FP设定
— 5-10 —
Page 82

5. 调整
SG
参数
运行」的
的调整,请在
①~⑧步骤并使电机运行。)
通过命令
进行参数SG:伺服增益 的微调。
①
参数名称+/AJ 。
输入
变成下述画面所示,通过输入+键、-键则可调节SG值(在下述虽显示为
行自动调整时因调整结果不同数值也会有所差异。)
G / S J
:
若按
②
结合电机的运行,数次按+键。
SHIFT+
请勿输入。
•
用于防止参数SG的数值突然变化。
SP/AJ
:运 行 演 示 使电机处于运行状态下进行。(执行「5.2.4. 试
按+键, - 键时 SG 值的变化量
ENT
=
.
键,会变更按
.
A
=
键,
:>
:>SG/AJ
STEP 1
SG 5 _
当前的设定值
+
键、−键时SG值的变化量,故
SG5
,执
按住,
SHIFT
再按,
- +-
+
…
:>
:>SG/AJ
STEP 1
SG 10 _
随着SG值的变大,请确认电机的运行变得更为虎虎有力。
③若接着按+键,很快电机将小幅处于振动状态。
+
SHIFT
,再按
-
+
-
… 按住
:
:SG/AJ
STEP 1
SG 18 _
数次按−键降低SG值,直至振动停止。
④
…
- + - +
:
:SG/AJ
STEP 1
SG 16 _
计算从振动状态停止的SG值的
⑤
例如,在
SG16
时,假设其已经从振动状态中停止,则为
80%。
16×0.8≒13
请将该值作为参数SG进行设定。
— 5-11 —
:
:SG/AJ
STEP 1
SG 13 _
Page 83

5. 调整
⑥按 ENT
(若按 BS
键则调整结束,显示已变更的参数。
键,则恢复至调整前的值。)
ENT
:>SG/AJ
STEP 1
SG 13
PG0.26;_
显示在各项上添加了“;(分号)”,在此状态下暂时停止。
⑦按 SP 键。
(按 BS 键时中断显示。)
SP SP
SG 13
PG0.26;
VG2.81;
:>_
— 5-12 —
Page 84

5.4. 调整级别 3:手动调整
:
请将环境设定为,即使电机旋转1周也不会出现安全问题的状态。
在伺服增益微调未得到满意的调整结果的情况下进行手动调整。
5.4.1. 准备手动调整
5. 调整
(1)
(2)
(3)
参数初始化。(参照「5.2.2. 伺服参数初始化」)
调整前请设定好负载惯量。(参照「5.3.1. 输入负载惯量」)
通过命令
⑧的步骤并使电机旋转。)
SP/AJ
:运行演示 使电机处于运行状态下,进行手动调整(执行「5.2.4. 试运行」的①~
5.4.2. 速度环比例增益:调整 VG
进行参数VG:速度环比例增益 的微调。
①
输入
参数名称+/AJ 。
变成下述画面所示,通过输入 + 键、 − 键则可调节 VG 值。
G / V J
:按
SHIFT+
•
请注意参数VG的值突然改变,可能会导致电机振动。
若输入
按 + 键, − 键时 VG 值得变化量
A
=
.
键后,按
=
.
键,按 + 键、 − 键时
+ 键、 − 键时
ENT
:>
:>VG/AJ
STEP 0.10
VG 0.50 _
当前设定值
VG
值的变化量将是当前的10倍。
FP
值的变化量将是当前的
1/10。
②
结合电机的运行,多次输入+键。
+
按住
SHIFT
,再按
-
+
-
…
:>
VG/AJ
:>
STEP 0.10
VG 3.00 _
随着VG值的变大,请确认电机的运行变得更为虎虎有力。
— 5-13 —
Page 85

5. 调整
③
接着按+键,电机将渐渐处于振动状态。
按住
SHIFT
④多次按 -
计算从振动状态停止的VG值的 80%。
⑤
例如,在
- +-
键降低 VG 值,直至停止振动。
- + - +
…
VG4
时,假设其已经从振动状态中停止,则为
+
… ,再按
4×0.8=3.2
请将该值作为参数 VG 进行设定。
⑥
多次输入-键,
- + - +
…
请将
VG
值降至上述的设定值。
:>
:>
VG/AJ
STEP 0.10
VG 4.90 _
:>
:>
VG/AJ
STEP 0.10
VG 4.00 _
:
:VG/AJ
STEP 0.10
VG 3.20 _
请按
ENT
⑦
(若按
ENT
若变更参数VG,则所设定的参数SG:伺服增益 清除为
◊
在「5.3.2. 微调伺服增益」
被联动设定。
键。将显示提示符,调整结束。
BS
键,则恢复至调整前的值。)
中若设定参数
在本项中,由于单独设定了参数VG,并不是由参数SG所导出的值。因此变为
VG/AJ
:>
STEP 0.10
VG 3.20
:>_
。
SG0
SG
,参数PG:位置环比例增益、参数VG将
SG0
。
— 5-14 —
Page 86

5.5. 调整滤波器(调整级别 2)
通过设定低通滤波器(参数FP、FS),可以降低电机的共振音。参数FP、FS的数值表示频率[Hz]。
◊
调整增益后,若出现振动或者共振音,请将参数FP设定为
◊
若参数FP、
起注意。
通过命令SP/AJ:演示运行 在电机工作的状态下,调整低通滤波器。(请执行「5.2.4. 试运行」
①~⑧的步骤并使电机旋转。)
5.5.1. . 调整低通滤波器
进行参数FP:第 1 低通滤波器 的微调。
①
输入
参数名称+/AJ 。
FS
5. 调整
FP200
。
值过小,伺服系统会变得不稳定,引起电机的振动,影响定位精度。请引
变成下述画面所示,通过输入+键、-键可调节FP值。
P / F J
按+键, - 键时 FP 值的变化量
A
ENT
:>
:>FP/AJ
STEP 10
FP 0 _
当前设定值
=
:
②按+
SHIFT+
若按
•
请注意参数FP的值突然改变可能会导致电机工作不稳定。
键。
.
若输入
滤波器频率暂且设置为 1
SHIFT
按住
,再按
.
键后,按 + 键、 - 键时FP值的变化量将是当前的10倍。
=
键,按 + 键、 - 键时FP值的变化量将是当前的
[kHz]。
+
-
:>
:>
FP/AJ
STEP 10
FP 1000 _
。
1/10
多次输入-键降低FP值(低通滤波器频率),直至旋转声音达到满意的程度。
③
…
- + - +
:>
:>FP/AJ
STEP 10
FP 990 _
— 5-15 —
Page 87

5. 调整
③
若电机工作不稳定,多次输入
+
键提高低通滤波器频率(
FP
值),直至电机稳定工作。
④
[参考]禁用低通滤波器时
5.5.2. 调整陷波滤波器
设定陷波滤波器(NP、NS)时,需要使用示波器等测定仪器在驱动器前面的监视端子上测定速度波
形并测定谐振频率。
+
SHIFT
按住
请按
ENT 键。显示提示符“:(冒号)”,调整结束。
(若按
ENT
F
,再按
BS
键,则恢复至调整前的数值。)
P 0
?
- +-
ENT
…
:>
:>
FP/AJ
STEP 10
FP 120 _
FP/AJ
:>
STEP 10
FP 120
:>_
:
:
:FP0
:_
如「图 5-3:测定谐振频率与设定陷波滤波器」测定谐振频率,若振动的频率为 200Hz,则输入
“
NP200”。
?
N
P 2
$
0
0
?
ENT
:
:
:NP200
:_
示波器
示波器画面
200Hz( 5ms)
图
5-3:测定谐振频率与设定陷波滤波器
— 5-16 —
Page 88

6. 运行
6.1. 运行准备
6.1.1. 确认事项
No.
电源·输入输出线的连接
1
连接电缆 • 电缆组(电机电缆、旋转变压编码器电缆)是否正确连接并被锁死
2
手持终端 • 手持终端是否正确连接至 CN1 并被锁死
3
:
EDC
型驱动器的接线完成后,开始运行前,请确认「表 6-1:运行前的确认」
中的项目。
表 6-1:运行前的确认
确认事项 确认内容
•
接线是否正确
•
接地端子的螺钉是否拧紧
•
连接器是否连接正确并被锁住
6. 运行
6.1.2. 运行步骤
接通电源
• 检查电源电压(控制电源、主电源)
• 请检查是否接通电源、驱动器前面的电源 LED(绿)是否亮灯
• 请检查手持终端上是否显示默认的设定画面。
调整
• 请参照「5. 调整」。
运行
以及 7 段 LED 显示是否正常。
调整伺服参数。若已经调整则可以省略。
设定坐标方向
设定坐标原点
设定软行程限制
「
6.2.2.
「
6.2.3.
「
6.2.4.
坐标方向」
设定坐标原点」
软行程限制」
运行
通信运行
程序运行
脉冲串输入运行
JOG
RS-232C
「
6.3.2.
「
6.3.3.
「
6.3.4. JOG
「
6.3.5.
程序运行」
脉冲串输入定位」
通过
运行」
RS-232C
通信指令定位」
图
6-1
:运行步骤
— 6-1 —
Page 89

6. 运行
6.2. 设定坐标系
6.2.1. 坐标分辨率
z
在电机内部用于位置检测的齿轮有 80 齿,通过数字信号处理将 1 齿分割成
1 周的分辨率则变成下述:
32 768×80 = 2 621 440
z
在本系统中的参数·命令是以本坐标分辨率中的单位(脉冲单位)为基准的。
◊
除了脉冲单位,也可以用角度单位或用户设定单位设定定位命令与监视坐标。
脉冲单位[计数/转]
2 621 440 36 000
PS型
°
270
1 966 080
脉冲
[计数/转]
表
6-2
:坐标分辨率
坐标分辨率
°
0
脉冲
0
(原点复位点或者命令 AZ 执行点)
正方向
角度单位[0.01°/转]
32768,因此,电机旋转
1 310 720
180
脉冲
°
°
90
图
6-2
655 360
:坐标系统
脉冲
— 6-2 —
Page 90

6.2.2. 坐标方向
z
z
为了即便倒置电机安装方向也不引起操作上的故障,可以反转坐标的计数方向。
◊
CW/CCW
◊
通过参数DI:坐标方向 设定坐标的计数方向。
◊
参数DI与计数方向的关系显示在「表 6-3:参数DI与计数方向坐标」。
(出厂时设定)
反转坐标方向时,以下功能的方向也被反转。
◊
所有的运行方向
◊
软行程限制设定方向
方向为从电机输出侧看到的方向。
表
6-3
:参数DI与计数方向坐标
参数 DI CW 方向 CCW
0
1
减计数
加计数
减计数
加计数
方向
6. 运行
:
在本说明书中,将旋转方向记载为“正方向”“负方向”。由于从电机输出轴侧看到
的实际旋转方向(
替换记载。
:
即使反转坐标方向,也不反转硬行程限制安装方向及位置反馈信号输出相位。
将 CCW 方向设定为加计数时
z
输入参数DI并反转坐标方向。
(参数DI需要密码。)
/
O
D
•
OTP
•
OTM
N
N
I 1
CW
方向·
CCW
方向)因参数DI的设定而有所差异,请根据设定
输入 :以电机输出轴侧为视角,阻止
输入 :以电机输出轴侧为视角,阻止
S K
ENT
#
ENT
SP
:
NSK ON
:
:_
CW
方向的旋转
CCW
/NSK ON
DI1
方向的旋转
— 6-3 —
Page 91

6. 运行
6.2.3. 设定坐标原点
z
电机在出厂时本身具有电机固有的原点(电机原点)。
z 作
为运行基点的用户原点出厂时与电机原点设定相同。
通过命令AZ:原点设定 或原点复位运行可以变更该用户原点。
z
由于本系统内置绝对式传感器,若设定 1 次用户原点,每次接通电源后就不需要再进行原点复位。
z
如「图 6-3:用户原点与参数AO」所示,出厂时用户原点与参数原点一致。
◊
用户原点根据内部指令不仅成为(定位命令、
为脉冲串输入或位置反馈信号的分频功能的基点。
JOG
)运行或软行程限制的基点,而且也成
◊
若根据命令AZ与原点复位运行变更用户原点,将电机原点按CW方向运行至用户原点的
距离设定为参数
AO
:坐标偏移量。
270°
出厂时的状态
(用户原点=电机原点)
0°:
用户原点
电机原点
电机输出轴侧
180°
90
°
180
用户原点设定后的状态
(用户原点=电机原点+参数AO)
270
°
电机原点
电机输出轴侧
°
90°
参数
AO
0°:
CW方向
用户原点
图
6-3
:用户原点与参数
AO
— 6-4 —
Page 92

z
通过命令AZ:原点设定
①
使电机旋转至作为原点的位置。
※即使在伺服
②
通过监视TD:读取当前位置(0.01°单位)
变更坐标原点。
ON
的状态下,也可设定原点。
6. 运行
来确认当前位置。
ENT
结束监视时,请按
③
若输入命令AZ,则当前的指令位置(当前位置+位置偏差)变为原点。
(命令AZ需要密码。)
N
/
N
O
Z
A
通过执行命令AZ,参数AO也被同时变更。
(参数AO为电机本身固有的原点及原点设定点之间的偏移。)
按
SP
键,将显示提示符“:(冒号)”。
④
再次确认坐标。
ENT
/ D T R
BS
S K
ENT
ENT
/ D T R
键。
P
SP
P
:
:
:
TD/RP
TD 12345 _
:
/NSK ON
NSK ON
:AZ
AO1203312;_
:
AZ
AO1203312;
:
TD/RP
TD 0 _
要结束监视,请按
BS
键。
— 6-5 —
Page 93

6. 运行
6.2.4. 软行程限制
z
用于在电机旋转范围内设置禁止区域。
z
软行程限制区域由参数
以参数
z
若参数
:
警报F2:软超程 不是对电机的当前位置,而且对指令位置进行判断。根据(指
令位置=当前位置+位置偏差)
因此指令位置若在软行程限制区域外,即使超程等实际的位置是在软行程限制区
域内,也不会出现警报。
:
要在当前位置进行位置管理时,由于需要通过硬行程限制进行检测,因此必须在
外部安装行程限位传感器。
:
通过命令
AD·AR·AQ
区域,不管移动量如何,都将避开“入侵禁止区域”进行旋转。
•
有关避开限制区域的详情,请参照「8.6.3. 就近定位」。
OTP、OTM
OTP
为基点,按计数增加方向旋转至
OTP与OTM
的差超过 1 脉冲,软行程限制区域将为有效。
:绝对定位 就近定位时,若由软行程限制设定了入侵禁止
:软行程限制 设定。限制区域如「图 6-4:软行程限制区域」所示,
OTM
之间的范围为限制区域。
.
参数
7段 LED 命令 TA:读取警报 说明
DI0
F2
的情况下
OTM
z
z
:行程限制区域起点
:行程限制区域终点
若入侵软行程限制区域,将处于超程状态。向入侵限制方向运行时,电机在伺服 ON 的状态下紧急停
止。此时,仅接受可脱离限制方向的运行指令。
若处于超程状态,
F2>Software Over Travel
计数增加
软行程限制区域
OTPA
输出·
图
6-4
:软行程限制区域
OTMA
表
6-4
:软超程状态
参数
DI1
计数增加
输出:检测出行程限制 将处于开启状态。
软超程 伺服 LOCK
的情况下
软行程限制区域
OTM
:行程限制区域起点
OTP
:行程限制区域终点
OTP
电机状态
z
接通电源时和伺服
进行处理。此外,若当前位置处于
OFF
时,若当前位置已进入软行程限制领域,以距离较近侧的行程限制的超程来
OTP、OTM
— 6-6 —
中心时,作为从正方向进入限制区域的超程进行处理。
Page 94

6.2.4.1. 通过示教设定
z
设定原点位置后按以下步骤进行设定。
①
请关闭供给驱动器的主电源。
②
禁止电机的伺服ON。
6. 运行
M
③
手动将电机的可移动部分移动至正行程限制点。
④
将当前位置作为正行程限制进行示教。
(参数
输入参数名称+
OTP
/
O
ENT
O
需要密码。)
/ST 。
N
S K
ENT
N
SP
T P O S T /
ENT
通过示教,完成设定参数
按
SP
键,将显示提示符“:(冒号)”。
⑤
手动将电机的可移动部分移动至负行程限制点。
OTP
。
:MO
:_
:/NSK ON
NSK ON
:OTP/ST
OTP123456;_
⑥
将当前位置作为负侧行程限制进行示教。
(参数
输入参数名称+
/
O
OTM
需要密码。)
N
N
/ST 。
S K
ENT
SP
:
/NSK ON
NSK ON
:
OTM/ST
OTM456789;_
T MO S T /
ENT
通过示教,可以设定参数
按
SP
键,将显示提示符“:(冒号)”。
⑦
将电机可移动部分移动至行程限制区域,确认输出了警报F2:软超程 。(通过7段
显示或者命令TA:读取警报 进行确认。)
⑧
输入命令SV:允许伺服ON,将电机恢复至允许伺服
ENT
V S
OTM
。
ON
的状态。
:OTM/ST
OTM456789;
:SV
:_
LED
— 6-7 —
Page 95

6. 运行
6.2.4.2. 通过坐标数据设定
z
若预先清楚行程限制的坐标值,可以通过参数
(参数
OTP、OTM
①
设定正行程限制。
需要密码。)
OTP、OTM
:软行程限制 直接设定坐标。
O
N S /
N
T P O 2 $3
5 % 6
4 >
设定负行程限制。
②
O
N S /
N
T MO 5 %6
8 ( 9
7 ‘
ENT
ENT
SP
K
#
1
&
ENT
SP
K
>
4
)
ENT
<
&
:/NSK ON
NSK ON
:OTP123456
:_
:/NSK ON
NSK ON
:OTM456789
:_
— 6-8 —
Page 96

6.3. 运行
6.3.1. 定位命令
z
EDC
型驱动器内置了定位命令。执行定位命令的方法有以下 2 种:
◊
通过
RS-232C
◊
预先在驱动器的程序区域上编程定位命令或定位条件,通过
序·通道、
z
定位命令与相关参数显示在「表 6-5:定位命令与相关参数」。详情请参照「9. 命令/参数解说」。
类型 名称 功能 默认值 范围 单位
IR
AR
AR /PL
AR /MI
ID
命
AD
令
AD /PL
AD /MI
IQ
AQ
AQ /PL
AQ /MI
IN
IS
MV
MA
参
MB
数
CSA
CSB
QR
★
增量式脉冲单位定位 − 0~±262 144 000
绝对式脉冲单位定位
绝对式脉冲单位定位
(指定+方向,例:AR100000/PL)
绝对式脉冲单位定位
(指定-方向,例:AR100000/MI)
增量式角度单位定位 − 0~±3 600 000
绝对式角度单位定位
绝对式角度单位定位
(指定+方向,例:AD9000/PL)
绝对式角度单位定位
(指定-方向,例:AD9000/MI)
增量式用户单位定位 − 0〜±QR×100
绝对式用户单位定位
绝对式用户单位定位
(指定+方向,例:AQ180000/PL)
绝对式用户单位定位
(指定-方向,例:AQ180000/MI)
定位完成检测值
定位稳定确认计时器
旋转速度
旋转加速度
旋转减速度
加速模式
减速模式
用户单位定位分割数
通信直接输入命令。
RUN
输入:程序启动 进行选择或实施。
表
6-5
:定位命令与相关参数
(就近旋转)
(就近旋转)
(就近旋转)
★
需要输入密码。
− 0~2 621 439
− 0~2 621 439
− 0~2 621 439
− 0~35 999
− 0~35 999
− 0~35 999
− 0~( QR 设定值-1)
− 0~( QR 设定值-1)
− 0~( QR 设定值-1)
400
0.0
1.000
1.0
0.0
1
0
360 000
PRG0~7
输入:选择内部程
0~2 621 439
0.0~10 000.0
0.001~10.000
0.1~800.0
0.0:使用 MA 的值
0.1~800.0
0:使用 CSA (仅 CSB )
1:加速度
2:变形正弦
3:变形梯形
4:摆线
5:单串
1〜2 621 440 分割/转
pulse
0.01°
360°
/
参数
pulse
ms
s-1
s
6. 运行
QR
-2
— 6-9 —
Page 97

6. 运行
1
2
6.3.2. 程序运行
z
程序运行指的是预先在驱动器的程序区域中编程定位命令和定位条件,由
行通过
z
程序运行固有的命令·参数显示在「表 6-6:程序运行的相关输入输出·参数」,与定位相关的命令·参
PRG0~7
◊
即使为
输入:选择内部程序·通道 所选择的程序。
RS-232C
通信也可运行程序。
数显示在「表 6-5:定位命令与相关参数」。详情请参照「9. 命令/参数解说」。
表
6-6:程序运行的相关输入输出/参数
类型 名称 功能 默认值 范围 单位
控制输入
RUN
STP
控制输出
BUSY
IPOS
FW
参
BW
MD
数
OE
PRG0〜7
启动程序 − 通过 OFF→ON 启动运行 −
切换内部程序·通道 −
停止 −
运行中 −
定位完成 −
通过 ON/OFF 指定通道(2 进制数格式)
OFF:允许运行
ON:开始减速、禁止运行
开:空闲状态
关:运行中
开:定位未完成·丧失目标位置
关:定位完成·保持目标位置
−0.1~−10 000.0: CFIN 模式
IPOS 输出模式 −1.0
0.0: IPOS 模式
0.1~10 000.0: FIN 模式
BUSY 最低保持时间
停止输入减速率
序列码
0.0
0.0
0.0:
使用该运行的减速度
0:
执行该通道结束后,结束
1:
执行该通道结束后
0
略 PRG 输入。)
2:
执行该通道结束后
,通过 RUN 输入执行下个编号的通道(忽
,自动执行下个编号的通道
RUN
输入:启动程序 执
0.0〜10 000.0
0.1〜800.0
−
−
−
−
ms
−
ms
ms
−
s
-2
z
在程序中,除了定位命令与速度·加速度之外,可对增益设定与定位完成条件等大部分参数进行编
程。由此,可以实现适合各操作进行最优调整。
z
程序的内容非常简单。基本上是由参数设定与定位命令构成,从开头执行。在「图 6-5:程序内容」
中显示程序的示例。
从第一行执行
CH0
:
0?MV2.000
1?MA5.0
2?ID9000
3?
旋转速度
旋转加速度
正方向相对移动
※
在该行等待,直至定位结束
程序体
2s
5s
-
-
90
°
:_
已设定的参数保持至程序结束。※1
※1
即使程序运行结束,在程序内也可保持已设定的
参数。详情请参照「表 8.7.1. 通过程序运行变
更参数」。
图
6-5
:程序内容
— 6-10 —
Page 98

6.3.2.1. 通过 I/O 运行程序
z 显示通过 I/O 运行程序的典型步骤。
6. 运行
SVON
输入
输出
SVST
选择通道
( PRG0〜7
RUN
输入
电机运行
位置偏差计数器
积存脉冲
BUSY
IPOS
( FW<
( FW=
IPOS
(
FW
输出
输出
0:CFIN
0: IPOS
输出
>0:
输入
FIN
ON
OFF
关
开
①
170 ms max.(3.2 s max.
②
)
③
)
ON
OFF
确定选择通道
④
一旦检测到上升沿,马上进入作业
关
开
关
)
开
)
)
保持目标位置时为关。
丧失目标位置时为开状态。
关
开
⑤
1ms min.1ms min.
MA
稳定确认计时器
例
0.5 ms max.
0.5 ms max.
⑤
IS100:100ms
RUN
MB
输入无效
<
运行中的
100ms
RUN
输入将导致报警F5:程序异常。
MV
⑥
100ms
值
FW
※
接通电源 后,仅第一次伺服
需要 3.2[s]。
IN
设定值
1 ms max.
ON
图
6-6
:通过
I/O
运行程序的时序
①
开启
SVON
②
若电机处于伺服
③
请从
PRG0~7
1[ms]
④
若将
RUN
输入:伺服ON,电机将处于伺服
ON
状态,
SVST
输出:伺服状态 将处于关闭状态。
ON
的状态。
输入:选择内部程序·通道 中选择要执行的通道。此外,请在
前确定选择。
输入:启动程序 从关闭状态转变为开启状态,开始执行已选择的通道。
RUN
输入的
按照参数MA:旋转加速度、参数MB:旋转减速度、参数MV:旋转速度 的设定进行运
行。
⑤
执行通道内容时
位完成 强制处于开启状态。
若在
BUSY
⑥
运行结束时,若位置偏差计数器满足参数IN:定位完成检测值、参数IS:定位稳定确认计时器
设定的条件,定位完成。
若选择并启动了未进行过编程的通道,将会出现警告F5:程序异常。(参照「11. 警报、警告」。)
z
BUSY
输出时执行
输出:运行中 将处于关闭状态。此外,定位运行中
RUN
输入,则会出现警告F5:程 序 异 常 ,电机减速停止。
IPOS
输出:定
— 6-11 —
Page 99

6. 运行
选择内部程序·通道
z
通过以 2 进制数格式将
的通道。
通道编号
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
・ ・ ・ ・ ・ ・ ・ ・ ・
・ ・ ・ ・ ・ ・ ・ ・ ・
・ ・ ・ ・ ・ ・ ・ ・ ・
251
252
253
254
255
PRG0~7
输入:选择内部程序·通道 的ON·
OFF
进行组合,选择要执行
表
6-7
:通道选择表
PRG0〜7 输入的状态
(●:ON○: OFF)
PRG7 PRG6 PRG5 PRG4 PRG3 PRG2 PRG1 PRG0
○ ○ ○ ○ ○ ○ ○ ○
○ ○ ○ ○ ○ ○ ○ ●
○ ○ ○ ○ ○ ○ ● ○
○ ○ ○ ○ ○ ○ ● ●
○ ○ ○ ○ ○ ● ○ ○
○ ○ ○ ○ ○ ● ○ ●
○ ○ ○ ○ ○ ● ● ○
○ ○ ○ ○ ○ ● ● ●
○ ○ ○ ○ ● ○ ○ ○
○ ○ ○ ○ ● ○ ○ ●
○ ○ ○ ○ ● ○ ● ○
○ ○ ○ ○ ● ○ ● ●
○ ○ ○ ○ ● ● ○ ○
○ ○ ○ ○ ● ● ○ ●
○ ○ ○ ○ ● ● ● ○
○ ○ ○ ○ ● ● ● ●
○ ○ ○ ● ○ ○ ○ ○
○ ○ ○ ● ○ ○ ○ ●
○ ○ ○ ● ○ ○ ● ○
○ ○ ○ ● ○ ○ ● ●
○ ○ ○ ● ○ ● ○ ○
○ ○ ○ ● ○ ● ○ ●
○ ○ ○ ● ○ ● ● ○
○ ○ ○ ● ○ ● ● ●
○ ○ ○ ● ● ○ ○ ○
○ ○ ○ ● ● ○ ○ ●
○ ○ ○ ● ● ○ ● ○
○ ○ ○ ● ● ○ ● ●
○ ○ ○ ● ● ● ○ ○
○ ○ ○ ● ● ● ○ ●
○ ○ ○ ● ● ● ● ○
○ ○ ○ ● ● ● ● ●
○ ○ ● ○ ○ ○ ○ ○
○ ○ ● ○ ○ ○ ○ ●
● ● ● ● ● ○ ● ●
● ● ● ● ● ● ○ ○
● ● ● ● ● ● ○ ●
● ● ● ● ● ● ● ○
● ● ● ● ● ● ● ●
— 6-12 —
Page 100

6.3.2.2. 通过 RS-232C 运行程序
z
也可通过命令SP:执行程序 启动程序。
z
例,启动「图 6-7:程序内容」的程序。
从第一行
开始执行
:
CH0
0?
MV0.500
1?
MA0.5
2?
ID9000
3?
:_
6. 运行
0.5s-1
图
6-7
:程序内容
旋转速度
-2
旋转加速度
正方向相对移动90°
※在该行等待,直至定位结束。
程序体
已设定的参数保持至程序结束。※1
0.5s
※1 即使程序运行结束在程序内也可保持已设定的
参数。
详情请参照「表 8.7.1. 通过程序运行变更参
数」。
◊
由于「图 6-7:程序内容」为 0 通道的程序,则输入命令
?
ENT
0
P S
电机正方向旋转 90[°]
在此提示符“:(冒号)”变为“:>”。
:>
”显示局部参数有效。这表示通道0所设定的参数
“
提示符
◊
◊
电机正方向旋转
确认电机已经停止,按
ENT
在此,返回至提示符“:”。
z
提示符表示了在读取参数时显示的是局域参数还是全局参数。
◊
当显示有效参数的提示符成为控制通信上的障碍时,请将参数PP:参数提示 设定为
禁用参数提示(提示符一直为“:”)。
90[°],通道 0 的程序执行结束后,全局参数再次有效。
ENT
键重新显示提示符。
:
SP0
:>_
:
SP0
:>
:_
SPO
。
MV·MA
一时有效。
PPO
:
z
即使提示符为
◊
设定参数PP需要输入密码。
:>
”
“
,通过
RS-232C
通信设定参数时,全局参数·局部参数两方同时被修改。
— 6-13 —
 Loading...
Loading...