

NSC DS92LV040ATLQAX, DS92LV040ATLQA Datasheet
DS92LV040A
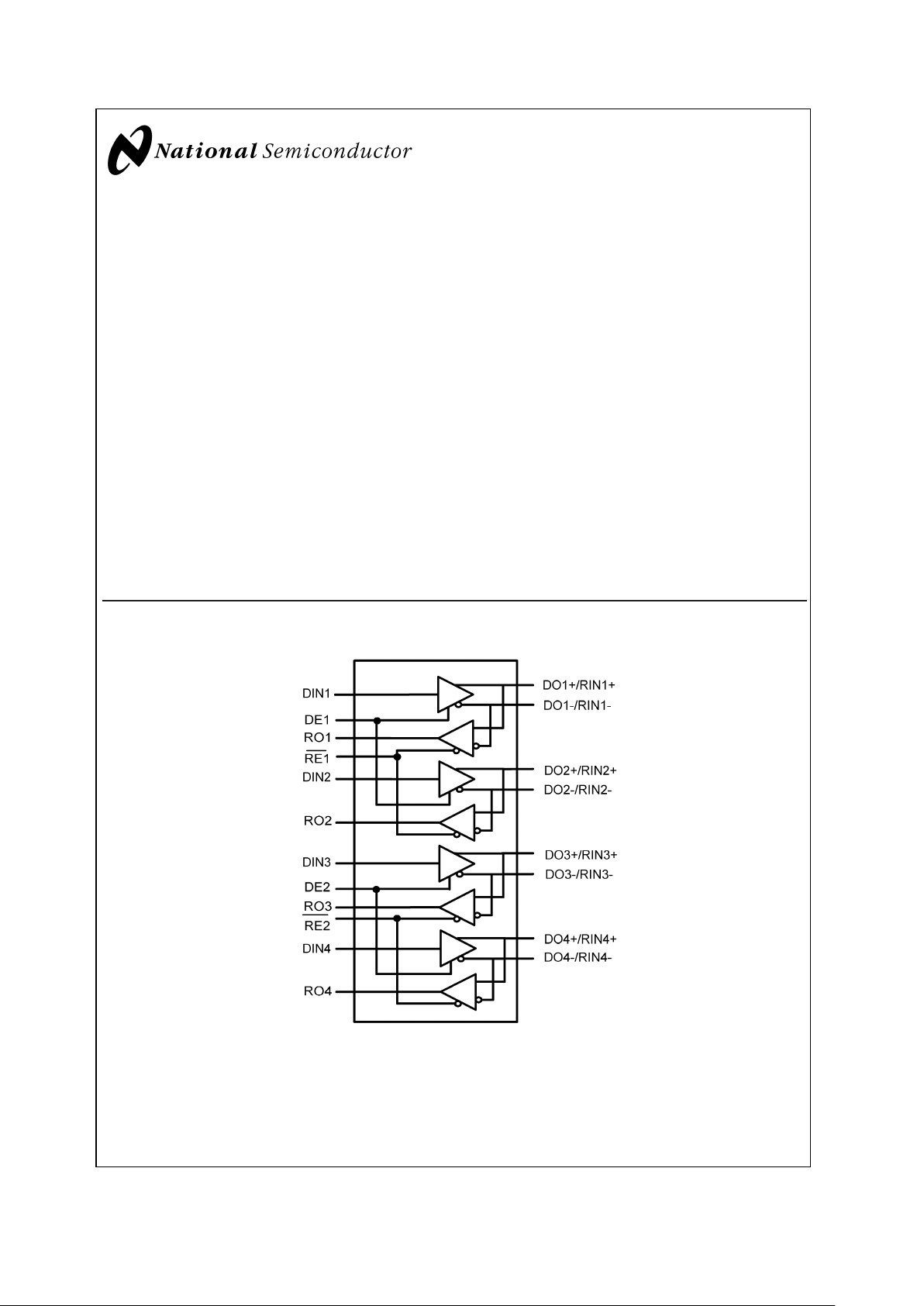
4 Channel Bus LVDS Transceiver
General Description
The DS92LV040A is one in a series of Bus LVDS transceivers designed specifically for high speed, low power backplane or cable interfaces. The device operates from a single
3.3V power supply and includes four differential line drivers
and four receivers. To minimize bus loading, the driver outputs and receiver inputs are internally connected. The device
also features a flow through pin out which allows easy PCB
routing for short stubs between its pins and the connector.
The driver translates 3V LVTTL levels (single-ended) to differential Bus LVDS (BLVDS) output levels. This allows for
high speed operation while consuming minimal power and
reducing EMI. In addition, the differential signaling provides
common mode noise rejection greater than
±
1V.
The receiver threshold is less than +0/−70 mV. The receiver
translates the differential Bus LVDS to standard (LVTTL/
LVCMOS) levels. (See Applications Information Section for
more details.)
Features
n Bus LVDS Signaling
n Propagation delay: Driver 2.3ns max, Receiver 3.2ns
max
n Low power CMOS design
n 100% Transition time 1ns driver typical, 1.3ns receiver
typical
n High Signaling Rate Capability (above 155 Mbps)
n 0.1V to 2.3V Common Mode Range for V
ID
= 200mV
n 70 mV Receiver Sensitivity
n Supports open and terminated failsafe on port pins
n 3.3V operation
n Glitch free power up/down (Driver & Receiver disabled)
n Light Bus Loading (5 pF typical) per Bus LVDS load
n Designed for Double Termination Applications
n Balanced Output Impedance
n Product offered in 44 pin LLP (Leadless Leadframe
Package) package
n High impedance Bus pins on power off (V
CC
= 0V)
Simplified Functional Diagram
10133601
August 2002
DS92LV040A 4 Channel Bus LVDS Transceiver
© 2002 National Semiconductor Corporation DS101336 www.national.com
Absolute Maximum Ratings (Notes 1,
2)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales Office/
Distributors for availability and specifications.
Supply Voltage (V
CC
) 4.0V
Enable Input Voltage
(DE, RE)
−0.3V to (VCC+0.3V)
Driver Input Voltage (D
IN
) −0.3V to (VCC+0.3V)
Receiver Output Voltage
(R
OUT
) −0.3V to (VCC+0.3V)
Bus Pin Voltage (DO/RI
±
) −0.3V to +3.9V
ESD (Note 4)
(HBM 1.5 kΩ, 100 pF)
>
4kV
Machine Model
>
250V
Maximum Package Power Dissipation at 25˚C
LLP(Note 3) 4.8 W
Derate LLP Package 38.8mW/˚C
θ
ja
(Note 3) 25.8˚C/W
θ
jc
25.5˚C/W
Storage Temperature Range −65˚C to +150˚C
Lead Temperature
(Soldering, 4 sec.) 260˚C
Recommended Operating
Conditions
Min Max Units
Supply Voltage (V
CC
) 3.0 3.6 V
Receiver Input Voltage 0.0 2.4 V
Operating Free Air Temperature −40 +85 ˚C
Slowest Input Edge Rate
(Note 7)(20% to 80%) ∆t/∆V
Data 1.0 ns/V
Control 3.0 ns/V
DC Electrical Characteristics
Over recommended operating supply voltage and temperature ranges unless otherwise specified (Notes 2, 4)
Symbol Parameter Conditions Pin Min Typ Max Units
V
OD
Output Differential
Voltage
RL=27Ω, Figure 1 DO+/RI+,
DO−/RI−
200 300 460 mV
∆V
OD
VODMagnitude Change 527mV
V
OS
Offset Voltage 1.1 1.3 1.5 V
∆V
OS
Offset Magnitude Change 5 10 mV
V
OHD
Driver Output High
Voltage
RL=27Ω
1.4 1.65 V
V
OLD
Driver Output Low
Voltage
RL=27Ω
0.95 1.1 V
I
OSD
Driver Output Short
Circuit Current (Note 11)
VOD= 0V, DE = VCC, Driver outputs
shorted together
|30| | 45| mA
V
OHR
Receiver Voltage Output
High (Note 12)
VID= +300 mV IOH=−4mA R
OUT
VCC−0.2 V
Inputs Open V
CC
−0.2 V
Inputs Terminated,
RL=27Ω
V
CC
−0.2 V
V
OLR
Receiver Voltage Output
Low
IOL= 4.0 mA, VID= −300 mV
0.05 0.100 V
I
OD
Receiver Output Dynamic
Current (Note 11)
VID= 300mV, V
OUT=VCC
−1.0V −50 |33| mA
V
ID
= −300mV, V
OUT
= 1.0V |36| 60 mA
V
TH
Input Threshold High
(Note 9)
DE = 0V, Over common mode range DO+/RI+,
DO−/RI−
−40 0 mV
V
TL
Input Threshold Low
(Note 9)
−70 −40 mV
V
CMR
Receiver Common Mode
Range
|VID|/2 2.4 −
|V
ID
|/2
V
I
IN
Input Current DE = 0V, RE = 2.4V,
VIN= +2.4V or 0V
−20
±
1 +20 µA
V
CC
= 0V, VIN= +2.4V or 0V −20
±
1 +20 µA
DS92LV040A
www.national.com 2
DC Electrical Characteristics (Continued)
Over recommended operating supply voltage and temperature ranges unless otherwise specified (Notes 2, 4)
Symbol Parameter Conditions Pin Min Typ Max Units
V
IH
Minimum Input High
Voltage
DIN, DE,
RE
2.0 V
CC
V
V
IL
Maximum Input Low
Voltage
GND 0.8 V
I
IH
Input High Current VIN=VCCor 2.4V −20
±
2.5 +20 µA
I
IL
Input Low Current VIN= GND or 0.4V −20
±
2.5 +20 µA
V
CL
Input Diode Clamp
Voltage
I
CLAMP
= −18 mA
−1.5 −0.8 V
I
CCD
Power Supply Current
Drivers Enabled,
Receivers Disabled
No Load, DE = RE = V
CC
,
DIN=VCCor GND
V
CC
20 40 mA
I
CCR
Power Supply Current
Drivers Disabled,
Receivers Enabled
DE=RE=0V,V
ID
=±300mV
27 40 mA
I
CCZ
Power Supply Current,
Drivers and Receivers
TRI-STATE
DE = 0V; RE = V
CC
,
DIN=VCCor GND 28 40 mA
I
CC
Power Supply Current,
Drivers and Receivers
Enabled
DE=V
CC
;RE=0V,
DIN=VCCor GND,
R
L
=27Ω
70 100 mA
I
OFF
Power Off Leakage
Current
VCC= 0V or OPEN,
D
IN
, DE, RE = 0V or OPEN,
V
APPLIED
= 3.6V (Port Pins)
DO+/RI+,
DO−/RI− −20 +20 µA
C
OUTPUT
Capacitance@Bus Pins DO+/RI+,
DO−/RI−
5pF
c
OUTPUT
Capacitance@R
OUT
R
OUT
5pF
AC Electrical Characteristics
Over recommended operating supply voltage and temperature ranges unless otherwise specified (Note 7)
Symbol Parameter Conditions Min Typ Max Units
DIFFERENTIAL DRIVER TIMING REQUIREMENTS
t
PHLD
Differential Prop. Delay High to Low (Note 9) RL=27Ω,
Figures 2, 3,
C
L
=10pF
1.0 1.5 2.3 ns
t
PLHD
Differential Prop. Delay Low to High (Note 9) 1.0 1.5 2.3 ns
t
SKD1
Differential Skew |t
PHLD–tPLHD
| (duty cycle)(Note 10),
(Note 9)
80 160 ps
t
CCSK
Channel to Channel Skew (all 4 channels), (Note 9) 220 400 ps
t
TLH
Transition Time Low to High (20% to 80%) 0.4 0.75 1.3 ns
t
THL
Transition Time High to Low (80% to 20%) 0.4 0.75 1.3 ns
t
PHZ
Disable Time High to Z RL=27Ω,
Figures 4, 5,
C
L
=10pF
5.0 10 ns
t
PLZ
Disable Time Low to Z 5.0 10 ns
t
PZH
Enable Time Z to High 5.0 10 ns
t
PZL
Enable Time Z to Low 5.0 10 ns
f
MAXD
Guaranteed operation per data sheet up to the Min.
Duty Cycle 45/55%,Transition time ≤ 25% of period
(Note 9)
85 125 MHz
DS92LV040A
www.national.com3
AC Electrical Characteristics (Continued)
Over recommended operating supply voltage and temperature ranges unless otherwise specified (Note 7)
Symbol Parameter Conditions Min Typ Max Units
DIFFERENTIAL RECEIVER TIMING REQUIREMENTS
t
PHLDR
Differential Prop. Delay High to Low (Note 9) Figures 6, 7,
C
L
=15pF
1.6 2.4 3.2 ns
t
PLHDR
Differential Prop Delay Low to High (Note 9) 1.6 2.4 3.2 ns
t
SDK1R
Differential Skew |t
PHLD–tPLHD
| (duty cycle)(Note 10),
(Note 9)
85 160 ps
t
CCSKR
Channel to Channel Skew (all 4 channels)(Note 9) 140 300 ps
t
TLHR
Transition Time Low to High (10% to 90%) (Note 9) 0.850 1.250 2.0 ns
t
THLR
Transition Time High to Low (90% to 10%) (Note 9) 0.850 1.030 2.0 ns
t
PHZ
Disable Time High to Z RL= 500Ω,
Figures 8, 9,
C
L
=15pF
3.0 10 ns
t
PLZ
Disable Time Low to Z 3.0 10 ns
t
PZH
Enable Time Z to High 3.0 10 ns
t
PZL
Enable Time Z to Low 3.0 10 ns
f
MAXR
Guaranteed operation per data sheet up to the Min.
Duty Cycle 45/55%,Transition time ≤ 25% of period
(Note 9)
85 125
MHz
Note 1: “Absolute Maximum Ratings” are those values beyond which the safety of the device cannot be guaranteed. They are not meant to imply that the devices
should be operated at these limits. The table of “Electrical Characteristics” provides conditions for actual device operation.
Note 2: All currents into device pins are positive; all currents out of device pins are negative.All voltages are referenced to ground unless otherwise specified except
V
OD
, ∆VODand VID.
Note 3: Package must be mounted to pc board in accordance with AN-1187 to achieve thermals.
Note 4: All typicals are given for V
CC
= +3.3V and TA= +25˚C, unless otherwise stated.
Note 5: ESD Rating: HBM (1.5 kΩ, 100 pF)
>
4 kV EIAJ (0Ω, 200 pF)>250.
Note 6: C
L
includes probe and fixture capacitance.
Note 7: Generator waveforms for all tests unless otherwise specified:f=25MHz, Z
O
=50Ω,tr,tf=<1.0 ns (0%–100%). To ensure fastest propagation delay and
minimum skew, data input edge rates should be equal to or faster than 1ns/V; control signals equal to or faster than 3ns/V. In general, the faster the input edge rate,
the better the AC performance.
Note 8: The DS92LV040A functions within datasheet specification when a resistive load is applied to the driver outputs.
Note 9: Propagation delays, transition times, and receiver threshold are guaranteed by design and characterization.
Note 10: t
SKD1|tPHLD–tPLHD
| is the worst case pulse skew (measure of duty cycle) over recommended operation conditions.
Note 11: Only one output at a time should be shorted, do not exceed maximum package power dissipation capacity.
Note 12: V
OH
fail-safe terminated test performed with 27Ω connected between RI+ and RI− inputs. No external voltage is applied.
Note 13: Chip to Chip skew is the difference in differential propagation delay between any channels of any devices, either edge.
Applications Information
General application guidelines and hints may be found in the
following application notes: AN-808, AN-977, AN-971, and
AN-903.
BLVDS drivers and receivers are intended to be used in a
differential backplane configuration. Transceivers or receivers are connected to the driver through a balanced media
such as differential PCB traces. Typically, the characteristic
differential impedance of the media (Zo) is in the range of
50Ω to 100Ω. Two termination resistors of ZoΩ each are
placed at the ends of the transmission line backplane. The
termination resistor converts the current sourced by the
driver into a voltage that is detected by the receiver. The
effects of mid-stream connector(s), cable stub(s), and other
impedance discontinuity as well as ground shifting, noise
margin limits, and total termination loading must be taken
into account. The DS92LV040A differential line driver is a
balanced current mode design. A current mode driver, generally speaking has a high output impedance (100 ohms)
and supplies a reasonably constant current for a range of
loads (a voltage mode driver on the other hand supplies a
constant voltage for a range of loads). Current is switched
through the load in one direction to produce a logic state and
in the other direction to produce the other logic state. The
output current is typically 12 mA. The current changes as a
function of load resistor. The current mode requires (as
discussed above) that a resistive termination be employed to
terminate the signal and to complete the loop. Unterminated
configurations are not allowed. The 12 mA loop current will
develop a differential voltage of about 300mV across a 27Ω
(double terminated 54Ω differential transmission backplane)
effective resistance, which the receiver detects with a 230
mV minimum differential noise margin neglecting resistive
line losses (driven signal minus receiver threshold (300 mV
– 70 mV = 230 mV)). The signal is centered around +1.2V
(Driver Offset, VOS ) with respect to ground. Note that the
steady-state voltage (VSS ) peak-to-peak swing is twice the
differential voltage (VOD ) and is typically 600 mV. The
current mode driver provides substantial benefits over voltage mode drivers, such as an RS-422 driver. Its quiescent
current remains relatively flat versus switching frequency.
Whereas the RS-422 voltage mode driver increases exponentially in most case between 20 MHz–50 MHz. This is due
to the overlap current that flows between the rails of the
device when the internal gates switch. Whereas the current
mode driver switches a fixed current between its output
without any substantial overlap current. This is similar to
some ECL and PECL devices, but without the heavy static
ICC requirements of the ECL/PECL designs. LVDS requires
80% less current than similar PECL devices. AC specifications for the driver are a tenfold improvement over other
DS92LV040A
www.national.com 4
 Loading...
Loading...