

Page 1

FSM-300 Fast Steering Mirror
& FSM-CD300B Controller/Driver
User’s Manual
Page 2

Page 3
EU Declaration of Conformity 3
Page 4

Page 5

Warranty 5
Warranty
Newport Corporation warrants that this product will be free from defects in
material and workmanship and will comply with Newport’s published specifications at the time of sale for a period of one year from date of shipment.
If found to be defective during the warranty period, then product will either
be repaired or replaced at Newport's option.
To exercise this warranty, write or call your local Newport office or representative, or contact Newport headquarters in Irvine, California. You will
be given prompt assistance and return instructions. Send the product, freight
prepaid, to the indicated service facility. Repairs will be made and the
instrument returned freight prepaid. Repaired products are warranted for the
remainder of the original warranty period or 90 days, whichever first occurs.
Limitation of Warranty
The above warranties do not apply to products which have been repaired
or modified without Newport’s written approval, or products subjected to
unusual physical, thermal or electrical stress, improper installation, misuse,
abuse, accident or negligence in use, storage, transportation or handling.
This warranty also does not apply to fuses, batteries, or damage from battery
leakage.
THIS WARRANTY IS IN LIEU OF ALL OTHER WARRANTIES, EXPRESSED OR
IMPLIED, INCLUDING ANY IMPLIED WARRANTY OF MERCHANTABILITY
OR FITNESS FOR A PARTICULAR USE. NEWPORT CORPORATION SHALL
NOT BE LIABLE FOR ANY INDIRECT, SPECIAL, OR CONSEQUENTIAL
DAMAGES RESULTING FROM THE PURCHASE OR USE OF ITS PRODUCTS.
First printing 2003
Copyright 2003 by Newport Corporation, Irvine, CA. All rights reserved.
No part of this manual may be reproduced or copied without the prior written
approval of Newport Corporation.
This manual has been provided for information only and product specifications are subject to change without notice. Any change will be reflected in
future printings.
© 2003 Newport Corporation
1791 Deere Ave.
Irvine, CA 92606
(949) 863-3144
P/N 40342-01, Rev. F
Page 6

6 Confidentiality & Proprietary Rights
Confidentiality & Proprietary Rights
Reservation of Title:
The Newport Programs and all materials furnished or produced in connection with
them ("Related Materials") contain trade secrets of Newport and are for use only in
the manner expressly permitted. Newport claims and reserves all rights and benefits
afforded under law in the Programs provided by Newport Corporation.
Newport shall retain full ownership of Intellectual Property Rights in and to all
development, process, align or assembly technologies developed and other derivative
work that may be developed by Newport. Customer shall not challenge, or cause any
third party to challenge, the rights of Newport.
Preservation of Secrecy and Confidentiality and Restrictions to Access:
Customer shall protect the Newport Programs and Related Materials as trade secrets
of Newport, and shall devote its best efforts to ensure that all its personnel protect
the Newport Programs as trade secrets of Newport Corporation. Customer shall not
at any time disclose Newport's trade secrets to any other person, firm, organization,
or employee that does not need (consistent with Customer's right of use hereunder)
to obtain access to the Newport Programs and Related Materials. These restrictions
shall not apply to information (1) generally known to the public or obtainable from
public sources; (2) readily apparent from the keyboard operations, visual display,
or output reports of the Programs; (3) previously in the possession of Customer or
subsequently developed or acquired without reliance on the Newport Programs; or
(4) approved by Newport for release without restriction.
Page 7

Table of Contents 7
Table of Contents
EU Declaration of Conformity..............Error! Bookmark not defined.
Warranty................................................................................................. 5
Confidentiality & Proprietary Rights..................................................... 6
Table of Contents ................................................................................... 7
1. Safety Precautions.................................................................. 11
1.1 General Safety Warnings............................................................ 11
1.2 General Cautions ........................................................................ 11
2. Fast Steering Mirror Technology........................................... 13
3. Typical Specifications............................................................17
3.1 FSM System ............................................................................... 17
3.2 Standard Mirror Options............................................................. 18
3.3 FSM-CD300B Controller/Driver................................................ 19
3.4 Bode Plots................................................................................... 20
3.5 Safe Operating Area ................................................................... 21
4. Unpacking the FSM................................................................. 23
4.1 Packing List................................................................................ 23
4.2 Freeing the Mirror Head............................................................. 23
4.3 Storing and Shipping the Mirror Head ....................................... 24
4.4 Replacing the Mirror .................................................................. 24
5. System Components..............................................................25
5.1 FSM Mirror Head Assembly ...................................................... 25
5.2 FSM-CD300B Controller/Driver................................................ 27
5.3 FSM Electronics ......................................................................... 28
5.4 FSM-CD300B Controller/Driver Cable Pin Connections.......... 29
5.5 Interface I/O Pin Connections .................................................... 31
6. System Operation................................................................... 32
6.1 Installation Location & Ventilation............................................ 32
6.2 Electrical Connections................................................................ 32
6.3 Command Inputs ........................................................................ 33
6.4 Position Outputs ......................................................................... 34
6.5 Fault Indication........................................................................... 34
6.6 External Sensor Feedback Control Mode................................... 35
6.7 Open Loop Control Mode .......................................................... 36
6.8 Maintenance & Service .............................................................. 37
Page 8

8 Safety Precautions
7. Appendices ............................................................................. 38
7.1 Appendix A – Troubleshooting the FSM System ...................... 38
7.2 Appendix B – Abbreviations ...................................................... 39
7.3 Technical Support....................................................................... 39
7.4 Service & Returns....................................................................... 40
7.5 Appendix C – Return Material Authorization Request .............. 41
Page 9

9
Page 10

Page 11
Safety Precautions 11
1. Safety Precautions
1.1 General Safety Warnings
Observe these general warnings when operating or servicing this system:
• Heed all warnings on the unit and in the operating instructions.
• Do not use this equipment in or near liquids.
• Do not operate this equipment in an explosive atmosphere.
• Only plug the controller/driver unit into a grounded power outlet.
• Route power cords and cables where they are not likely to be damaged.
• Disconnect power before cleaning the controller/driver unit. Do not use
liquid or aerosol cleaners.
• Only qualified service personnel should open the case of the
controller/driver. There are no user-serviceable components inside unit.
• Dangerous voltages associated with the 100-120 V AC power supply are
present inside controller/driver unit. To avoid injury, do not touch exposed
connections or components while power is on.
• Do not wear rings or wristwatches when troubleshooting electrical
circuits.
• To avoid fire hazard, use only the specified fuse(s) with the correct type
number, voltage and current ratings. Only qualified personnel should
replace fuses.
• Qualified service personnel should perform a safety check after any
service.
• To prevent damage to the equipment, read the instructions in this manual
for selection of the proper input voltage.
• If the Fast Steering Mirror is used with lasers, avoid looking into the laser
beam, and take precaution not to aim the laser beam at the eyes of others.
1.2 General Cautions
Observe these cautions when operating or servicing this equipment:
• Handle equipment with care, like other delicate electronic equipment.
• To prevent damage to equipment when replacing fuses, locate and correct
the problem that caused the fuse to blow before re-applying power.
Page 12
12 Safety Precautions
• Use only specified replacement parts.
• Follow precautions for static-sensitive devices when handling electronic
circuits.
• This product should only be powered as described in this manual.
• If this equipment is used in a manner not specified within this manual, the
protection provided by the equipment may be impaired.
• Do not position this equipment in a location that would make it difficult to
turn off power to the equipment or disconnect the AC power cord.
WARNING
AC power line voltages are present inside the controller/driver unit.
To avoid possibility of electrical shock, refer all service to qualified
personnel.
WARNING
If the Fast Steering Mirror is used with lasers, avoid looking into the
laser beam, and take precaution not to aim the laser at the eyes of
others.
CAUTION
Static-sensitive electronic equipment. Wear grounding strap when
handling electronic circuit boards and components found inside the
controller/driver unit.
FRAME & CHASSIS TERMINAL
This symbol identifies the terminal used for connecting a ground to
the chassis. The power cord, properly grounded, will normally ground
the chassis.
Page 13
Fast Steering Mirror Technology 13
2. Fast Steering Mirror Technology
Originally conceived for military/aerospace applications such as high-speed
target tracking and secure satellite-to-satellite communication, fast steering
mirror technology has been developed to the point where it is economically
viable for widespread commercial use in dynamic mirror alignment applica-
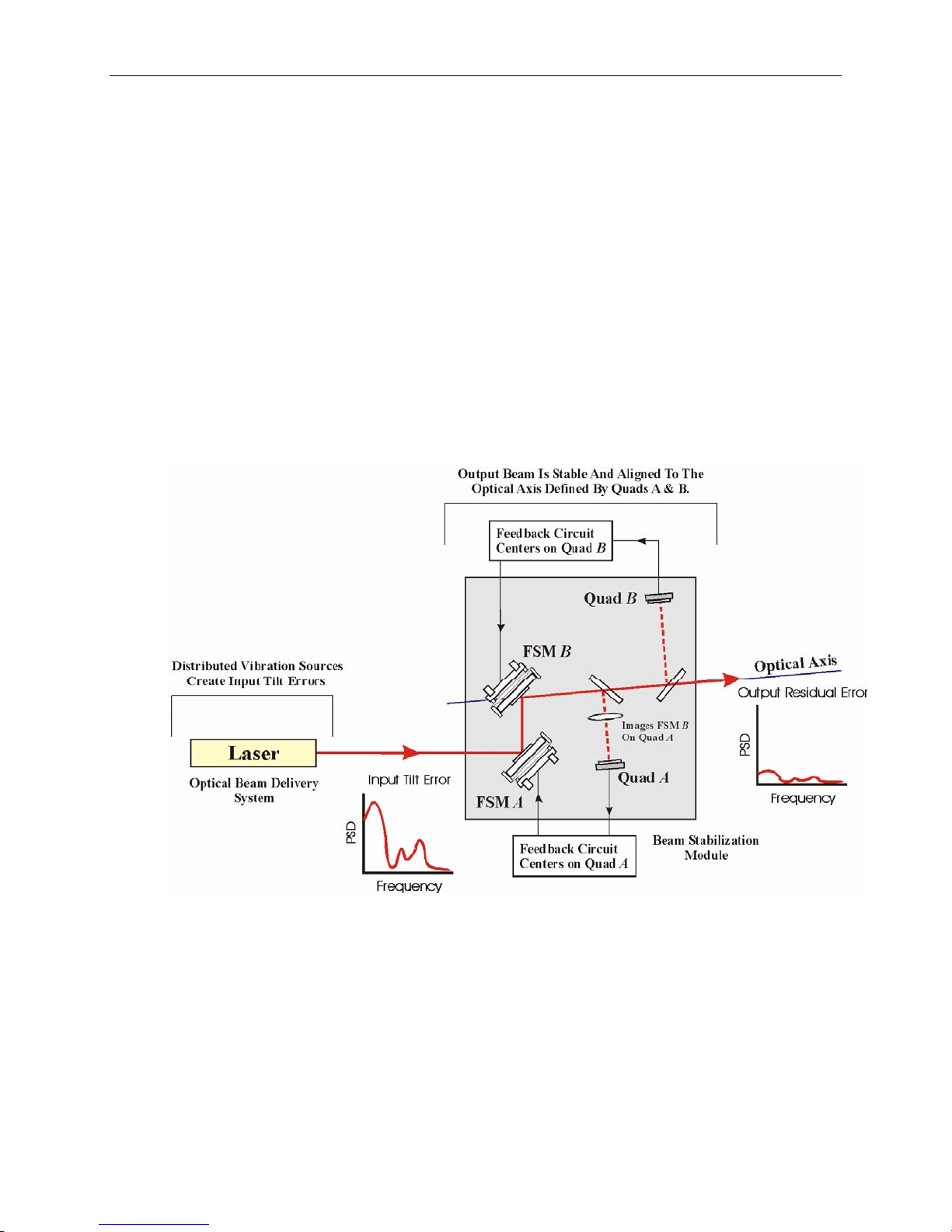
tions. This technology can be used to stabilize laser beams (Figure 1), track
work pieces for precision laser micro-machining, scan laser beams for realtime confocal microscopy, track optical receivers for laser free-space communication, and increase sharpness in sophisticated imaging systems.
Figure 1: Two fast steering mirrors used to compensate for input tilt errors.
A practical fast steering mirror head is shown in Figure 2. There are eight
basic head components: voice-coil actuators, mirror, mirror carrier, flexure
suspension, frame, housing, internal position sensors, and position sensor
electronics. These components work with the controller to produce the
precision rotation and speed characteristic of these devices.
Page 14

14 Fast Steering Mirror Technology
Figure 2: FSM mirror head showing the eight basic components.
The voice coil actuators
1
provide the torque necessary to tilt the mirror substrate. Four actuators are mounted behind the mirror, one in each quadrant.
Voice coils are connected in pairs along the diameter of the mirror and
operate in a push/pull manner, rotating the mirror about the axis that bisects
them. Two actuator pairs (four coils) plus a coordinate transformation are
used to produce two orthogonal rotations
θ
and
θ
x
about the X and Y axes.
y
The high force generated by four distributed actuators rotates large mirrors
more effectively than the one actuator used in galvanometer scanners. The
distributed force combined with thick optics enables the FSM mirror head to
preserve static and dynamic surface flatness, excellent positional resolution,
large angular range and rapid motion. The coil portion of the actuators is
placed within the support structure and contacted to a heat sink such that heat
produced in the actuator is dissipated far from the mirror surface, thus
minimizing thermal distortions.
A flexure suspension system is used to support the mirror carrier that holds
the mirror. This system allows free rotation about orthogonal X and Y-axes
while constraining side-to-side motion, rotation about the normal (Z) axis
and “pogo” motion along the Z-axis. Different types of flexure systems are
used for different FSM applications. Some flexure systems are stiff (large
spring constant) and offer a relatively stable and repeatable power-off mirror
1
Historically, voice coils were first used in loudspeakers, from which they derive their name. A linear
voice coil consists of a tubular coil of wire situated within the radially oriented magnetic field of a
permanent magnet. When current flows through the coil, a force is generated that causes axial (linear)
motion. This linear motion is then used to move the mirror.
Page 15

Fast Steering Mirror Technology 15
position. One downside to stiff flexures is the increased current necessary to
move the mirror. The FSM series of mirror heads is designed around a small
spring constant to keep the current and the consequential heating to a
minimum. As expected, the FSM in power-off status is greatly affected by
external effects such as gravity and vibrations. This power-off susceptibility
must be taken into consideration when designing the mirror into an integrated
system. Proper turn-on and turn-off procedures should be followed to ensure
that light is only applied to the mirror when it is powered and under the
control of either internal or external position feedback.
A position transducer is included in the FSM mirror head to provide position
feedback with reference to the support frame. This transducer senses the
angle of the mirror carrier and transfers this information to the position
sensor electronics board located within the mirror head. This board processes
the position information and outputs a differential voltage, A-B. This signal is
sent to the FSM-CD300B controller/driver to provide the appropriate
feedback current to the voice coils.
Page 16

16 Fast Steering Mirror Technology
Two significant advantages of FSM technology are derived from the flexure
suspension:
1. FSM flexure suspension eliminates bearing surfaces often used with
galvanometer scanners, and eliminates their associated stiction and wear.
With bearing surfaces, stiction interrupts the smooth motion of the
actuator and limits its accuracy (smallest incremental motion). Wear sets
a device lifetime based on the number of commanded cycles. On the other
hand, properly designed flexure suspensions have infinite cycle lifetimes.
2. FSM flexure suspension delivers motion about two axes intersecting
at a common pivot point. When the pivot point is placed at the surface
of the mirror, the design is called gimbaled. The advantage is that a
mirror-centered optical beam does not experience a change in path length
with angular rotation. The FSM is such a gimbaled design. On the other
hand, the two galvanometers and two mirrors used in dual-axis galvanometer-based designs make it impossible for the axes to intersect, with no
common pivot point and no gimbaled motion. Relay optics can solve the
problem by imaging the first galvo mirror onto the second, but at
substantially increased complexity and cost. The lack of a common pivot
point complicates post-objective and pre-objective scanning applications,
requiring a compromised optical design to accommodate the separate
rotation axes.
Actuators
The FSM-300 System comes with a 1” (25.4 mm) diameter, λ/10 Pyrex
mirror, which is available with a choice of reflective coatings for different
wavelengths. The mirror is bonded to an aluminum carrier, which is user
replaceable in the event that wavelength requirements are changed or the
mirror surface has been damaged. Two standard mirrors can be specified at
the time of order:
• 10D20ER.1: Enhanced Aluminum Coating. Multi-layer dielectric
stack deposited over an aluminum film for improved performance in the
visible and enhanced durability of the coating. Average reflectivity is
> 93% from 450-700 nm.
• 10D20ER.4: Protected Gold Coating. Multi-layer dielectric stack
deposited over a gold film for excellent reflectivity from the near IR to
the far IR. Average reflectivity is > 96% from 650- 1700 nm and > 98%
from 1.7-2.0 µm.
Page 17

Typical Specifications 17
3. Typical Specifications
3.1 FSM System
FSM-300
Number of Axes 2 (tip-tilt)
Angular Range from ±10 V ± 26.2 mrad (± 1.5°), mechanical
Resolution
Repeatability
Accuracy From ±26.2 mrad,
(1,2)
20°C
Linearity From ±26.2 mrad,
(1,2)
20°C
Closed-Loop Amplitude
Bandwidth
Closed-Loop Phase
Bandwidth
Response Flatness
(2)
(-3 dB)
(2)
(60° lag)
(2)
Noise Equivalent Angle (1 Hz to
≤ 1 µrad rms, mechanical
≤ 3 µrad rms, mechanical
≤ 0.262 mrad (0.015°), mechanical
≤ 1.0%
≥ 800 Hz at 10 mV
≥ 400 Hz
Peaking ≤ 3 dB
≤ 3 µrad rms
(1)
(1)
(1)
(1)
10 kHz)
Resolution of Local Position
≤ 0.5 µrad
Sensor
Quiescent Power at FSM
≤ 5 W at any angle ± 26.2 mrad
Assembly
Operating Temperature Range
Storage Temperature Range
Warm-up Time for Mirror
Stability
(2)
at 20°C
Mirror Thermal Drift(2)
(2)
0 to 35°C (32 to 95°F)
-20 to 55°C (-4 to 131°F)
≤ 10 minutes
≤ 5 µrad/°C, mechanical(1)
Optical Axis Location 1.5 in. (38.1 mm) high, centered left-to-right
Mirror Head Weight with Base 15.3 oz (434 g)
Interconnect Cable Length 9.8 ft (3 m)
Page 18

18 Unpacking the FSM
3.2 Standard Mirror Options
Mirror Substrate Material Pyrex
Mirror Retaining Mechanism Mirror bonded to aluminum carrier (user replaceable).
Mirror Pivot Point (centered on
mirror)
Mirror Diameter 25.4 mm
Mirror Thickness 6.0 mm
Mirror Wedge
Clear Aperture
incidence
Clear Aperture
incidence
Surface Flatness
and bonding)
Surface Quality
Reflectivity, Standard
Coatings
ER.1 Coating: Enhanced
Aluminum
ER.4 Coating: Protected Gold > 96%, 650- 1700 nm; > 98% from 1.7-2.0 µm
Additional coating options Please contact Newport.
(3)
at 0° angle of
(3)
at 45° angle of
(3)
(after coating
(3)
(3)
FSM-300
Gimbaled 12.19 mm behind mirror surface
≤ 5 arc min
≥ 20.3 mm
≥ 14.4 mm
≤ λ/10 at 632.8 nm over clear aperture
15-5 scratch-dig
> 93%, 450-700 nm
FOOTNOTES:
1) Optical angular range is equal to twice the mechanical angular range.
2) Measured under position output control. Optical closed-loop performance is also determined by
external feedback electronics.
3) Optical parameters apply to central 80% of mirror aperture.
NOTES:
4) Performance data is based upon well-defined, smooth, D-A sine wave inputs. Alternate inputs
(square waves, triangle waves, low resolution D-A sine waves) are addressed in section 6.3
Page 19

Unpacking the FSM 19
3.3 FSM-CD300B Controller/Driver
Command Input and Position Output Analog, ±10 V = ±26.2 mrad
Peak Operating Power to Mirror 30 W
Continuous Max Operating Power to Mirror 15 W
Thermal Protection 60°C at mirror coil
Operating Temperature
(2)
0 to 35°C (32 to 95°F)
Storage Temperature
Use Location Indoor use only
Relative humidity < 95%, non-condensing
Operating altitude < 3,000 m (10,000 ft)
Power 100-240 Vac ±10%, 47-63 Hz
Current consumption (typical) 0.40 A @ 100 Vac, 0.25 A @ 240 Vac
Fuses 2 ea, “slo-blo” (T), 5 x 20 mm, rated 2.5 A, 250 Vac
Weight 5.5 lbs (2.5 kg)
Case Dimensions (excluding connectors) 3.9” x 9.0” x 10.0” [h x w x d] (100 x 229 x 254 mm)
-20 to 55°C (-4 to 131°F)
Page 20

20 Unpacking the FSM
3.4 Bode Plots
Figure 3: Typical gain response Bode plot for small-angle excitation.
Amplitude 0.262 mrad.
Page 21

Unpacking the FSM 21
Figure 4: Typical phase angle Bode plot for small-angle angle excitation.
Amplitude 0.262 mrad.
3.5 Safe Operating Area
Figure 5: Typical shut-down curve as a function of amplitude and frequency at 20ºC.
Continuous operation is “safe” below the line. Derate for higher ambient temperatures.
Page 22

22 Unpacking the FSM
FSM operation is limited to an envelope of mirror deflection amplitude
versus frequency. For the FSM-300, amplitude is mechanically limited to 26
mrad up to 40 Hz. Above 40 Hz, long-term, continuous operation is limited
by the allowed thermal loading of the drive coils. The latter is approximately
proportional to signal amplitude times frequency squared. This means that
above 40 Hz, the maximum allowed amplitude is inversely proportional to
the square of frequency.
If the coils reach a temperature warning threshold, as measured by thermistors, a yellow warning light labeled CURR comes on; however, the system
continues to operate as before. If the coils reach an upper temperature shutoff threshold, a red warning light labeled TEMP comes on, and the mirror
reverts to the unpowered state. Upon cooling of the coils, the red light will
go off, and the system will automatically resume normal operation.
If the yellow warning light comes on during normal, continuous operation,
consider decreasing the drive signal frequency and/or amplitude to prevent
overheating of the drive coils and avoid a possible thermal shutdown.
Page 23

Unpacking the FSM 23
4. Unpacking the FSM
4.1 Packing List
Included with each FSM System are the following items:
• FSM-300 Mirror Head
• FSM-CD300B controller/driver
• FSM-CD300B controller/driver interconnect cable, 3 m
• Allen wrench for protective cover of Mirror Head
• Instruction manual
4.2 Freeing the Mirror Head
Figure 6: Protective lens tape and metal cover for mirror.
For shipment, the FSM mirror is secured by adhesive lens tape plus an oval,
hinged metal cover, as illustrated in Figure 6. To free the mirror, loosen the
two diagonally opposed retaining screws so that the protective cover can be
pivoted for easy removal. The appropriate Allen wrench is supplied with the
mirror head. Once the cover is removed, gently pull off the lens tape. Store
the lens tape inside a clean polyethylene bag for possible later use.
Page 24

24 Unpacking the FSM
4.3 Storing and Shipping the Mirror Head
When the mirror head is not in use, replace the oval protective cover so that
it covers and protects the mirror. If you ever have to ship the mirror head,
also reposition the lens tape.
4.4 Replacing the Mirror
The FSM is designed so that the user can replace the mirror assembly in the
event that the original mirror has been damaged or different spectral
characteristics are required. FSM mirrors bonded to a metal carrier are
available from Newport as subassemblies. Hex wrenches are required tools
for mirror removal and reinstallation. The FSM-300 requires 0.050” hex
wrenches. Use of Loctite 222 thread locker on mounting screws is
recommended.
To remove the mirror carrier, first remove the front protective cover plate.
To do so, remove the four retaining socket head cap screws using the
appropriate hex wrench. Then remove the mirror carrier. To do so, remove
the four retaining socket head cap screws using the appropriate hex wrench.
Reverse the process to install the new mirror carrier. Application of Loctite
222 thread locker to each of the mounting screws is recommended.
Figure 7: Replacement of FSM-300 mirror carrier.
CAUTION
The mirror surface is extremely delicate. Wear latex gloves to
minimize the possibility of fingerprints. Be extremely careful not
to scratch the mirror surface with the wrench or cap screws.
Page 25

System Components 25
5. System Components
5.1 FSM Mirror Head Assembly
Envelope and Mounting Interface
The FSM head assembly conforms to both 1-inch and 25 mm on-center hole
patterns and is configured for mounting at 0° and 45° angles on a standard
optical table or breadboard. The optical axis height is 1.50” when mounted.
The FSM-300head dimensions and mechanical interface are shown in
Figure 9.
Rotation Axes
The X and Y rotation axes are shown in Figure 8. Note that X rotation is
about the X-axis. The definition of these axes should be considered in the
mechanical layout and the coordinate frame definitions in the optical layout.
The polarity of the mirror rotation complies with the “right hand rule,” i.e.,
positive voltage applied at the command input creates positive (clockwise)
rotation as viewed looking along the axis.
effect detector is used as the angle sensor, the sensor axes of the detector
must be aligned to the rotation axes of the FSM mirror head.
If an external quad cell or lateral
Figure 8: X and Y axes corresponding to FSM input commands and position outputs.
Page 26

26 System Components
Figure 9: Detailed Drawing of FSM-300 Mirror Head Housing.
Page 27

System Components 27
5.2 FSM-CD300B Controller/Driver
The FSM-CD300B controller/driver establishes the feedback interface
between the angle position sensors and the drivers providing current to the
voice coils that tip and tilt the mirror assembly. It also provides an interface
between the user and mirror, allowing control voltages to be applied and
mirror positions to be ascertained.
The FSM-CD300B is equipped with a universal power supply that handles
100-240 V, 50/60 Hz. A standard power cord interface (IEC 950) facilitates
power plugs that are suitable for most European, North American, and Pacific
Rim Countries.
Figure 10. Removal of Fuse Block.
A fuse block is located above the power connector and utilizes two 5 x 20
mm slow-blow glass fuses rated 2.5 A, 250 Vac. To remove the fuse block,
first unplug the power cord, compress the two plastic tabs on the right and
left sides of the fuse block, and pull out the fuse block. No tools are needed.
When reinserting the fuse block, make sure that the alignment tab is at the
bottom.
WARNING
Dangerous voltages are present inside the FSM-CD300B controller/
driver when connected to AC line power. To avoid the possibility of
electrical shock, always unplug the unit from AC line power when
checking or changing fuses.
Page 28

28 System Components
Figure 11: Dimensioned exterior drawings of FSM-CD300B controller/driver.
5.3 FSM Electronics
The FSM electronics are housed in two locations:
1. The FSM Mirror Head containing the voice coil actuators, the angle
position sensors and the position sensor electronics.
2. The FSM-CD300B Controller/Driver containing the control circuits
(PIDs, calibration factors), current drivers, power supply, user interface and
interlocks.
The mirror head is connected to the controller/driver by a 3-meter long,
15-pin cable. The controller has a universal power supply that can be plugged
Page 29

System Components 29
directly into most wall outlets. The appropriate power cord for the destination
country should be included with your controller. If the correct cord is not
OL/CL
X-axis
OL Command
OL/CL
Y-axis OL Command
X - axis
Command
X-axis
Ext. Optical
Feedback
INT/EXT
J2
Internal/External
Feedback
present please contact your local Newport representative for assistance.
DRIVER A
X-axis
Command
(+)
(-)
X-axis
Control
A-axis
Command
X-axis
Position
B-axis
Position
(+)
A-axis
Position
(-)
I sense
Rs
A-axis
Position
A-axis
Position
J1
A- axis
actuator drive
A- axis position
A-axis
Position
(+)
(-)
DRIVER B
I sense
B-axis
Position
Y - axis
Command
Y-axis
Ext. Optical
Feedback
120/220 VAC
60/50 Hz
Pwr Supply
GREEN
(+)
+15VDC
-15VDC
Y-axis
Command
Y-axis
Control
(-)
B-axis
Command
Y-axis
Position
FAULT DETECTION
Figure 12: Functional Block diagram of FSM-CD300B controller/driver.
5.4 FSM-CD300B Controller/Driver Cable Pin Connections
The electrical connection between the mirror head and the controller/driver
is via a 15-pin D-connector terminated cable. This cable attaches between the
connector located on the back of the mirror head and the connector labeled
“FSM” on the front of the FSM-CD300B controller/driver. The position sen-
sors and voice coils are located on A and B axes (at 45° to the X and Y axes).
A coordinate transform is done in the controller/driver to produce X and Y
axis rotations.
Rs
RED
OVERTEMPERATURE
YELL
OVERCURRENT
B- axis
actuator drive
B- axis position
Page 30

30 System Components
Pin
Controller
1 6 +15VA DC power FSM positive 15V power
2 11 -15VA DC power FSM negative 15V power
3 2 B- Analog input B axis position sensor negative (±10V)
4 8 B_RTN Analog output B axis actuator drive return
5 13 B_OUT Analog output B axis actuator drive output
6 4 A- Analog input
7 10 A_RTN Analog output A axis actuator drive return
8 15 A_OUT Analog output A axis actuator drive output
9 1 GND Analog ground FSM ground reference and power return
10 7 B+ Analog input
11 12 B_TEMP_RTN Analog ground B axis temperature sensor return (Analog Ground)
12 3 B_TEMP Analog input B axis temperature sensor signal
13 9 A+ Analog input
14 14 A_TEMP_RTN Analog ground A axis temperature sensor return (Analog Ground)
15 5 A_TEMP Analog input A axis temperature sensor signal
Pin
FSM Head
Name
Type
Controller
Description
A axis position sensor negative (±10V)
B axis position sensor positive (±10V)
A axis position sensor positive (±10V)
Table 1. FSM pinout descriptions of 15-pin interface cable.
Figure 13: FSM pinout diagram of 15-pin interface cable.
Page 31

System Components 31
5.5 Interface I/O Pin Connections
A 25-pin D-connector on the front of the FSM-CD300B controller/driver
provides access to key diagnostic and control parameters from the control
board.
Pin Name Type Description
1 Y_CMD(+) Analog Input Y-Axis Command Signal, ±10V differential
2 Y_CMD(-) Analog Input Y-Axis Command Signal, ±10V differential
3 X_CMD(+) Analog Input X-Axis Command Signal, ±10V differential
4 X_CMD(-) Analog Input X-Axis Command Signal, ±10V differential
5 Y_ERR Analog Output Y-Axis Error Voltage Output
6 GND Ground Ground
7 X_ERR Analog Output X-Axis Error Voltage Output
8 GND Ground Ground
9 Y_OL_SW Digital Input
10 X_OL_SW Digital Input
11 Y_EXTFB(+) Analog Input Y-Axis External Feedback Input, ±10V differential
12 Y_EXTFB(-) Analog Input Y-Axis External Feedback Input, ±10V differential
13 NC No Connection No Connection
14 NC No Connection No Connection
15 X_EXTFB(+) Analog Input X-Axis External Feedback Input, ±10V differential
16 X_EXTFB(-) Analog Input X-Axis External Feedback Input, ±10V differential
17 INT/EXT_SW Digital Input
18 Y_POS_OUT Analog Output Y-Axis Position Output
19 GND Ground Ground
20 X_POS_OUT Analog Output X-Axis Position Output
21 GND Ground Ground
22 Y_OL_CMD Analog Input Y-Axis Open-Loop Command Voltage, ±10V, Single-Ended
23 GND Ground Ground
24 X_OL_CMD Analog Input X-Axis Open-Loop Command Voltage, ±10V, Single-Ended
25 GND Ground Ground
Y-Axis Open Loop Selector Switch Input
(0V = closed loop; 5V, 5 mA = open loop)
X-Axis Open Loop Selector Switch Input
(0V = closed loop; 5V, 5 mA = open loop)
External Feedback Selector Switch Input
(0V = internal; 5V, 5 mA = external)
Table 2: Front Panel Interface I/O Connector Pinout.
Page 32

32 System Components
6. System Operation
Figure 14: FSM-CD300B controller/driver.
6.1 Installation Location & Ventilation
The FSM-CD300B controller/driver is designed for indoor operation
in an ambient temperature of 0 to 35°C (32 to 95°F). Component cooling
is provided by a fan, which aspirates air through slots in both sides of the
unit and ejects air through the back. To assure adequate airflow, provide a
minimum clearance of 25 mm (1”) on both sides of the unit and 2” (50 mm)
in back of the unit. Also, adequate spacing behind the fan provides quieter
operation.
6.2 Electrical Connections
The FSM mirror head is interfaced to the FSM-CD300B controller/driver by
the system’s 15-pin connector cable. The controller/driver is powered from
an AC wall outlet. It is equipped with a universal power supply that
accommodates 100-240 Vac, 50/60 Hz. No switch or fuse needs to be
changed when going from 100 to 120 or 240 Vac power.
Prior to applying AC power, verify that the protective cover and protective
packing material have been removed from the FSM mirror head.
Prior to applying AC power, connect the system’s15-pin connector cable to
the FSM mirror head and FSM-CD300B controller/driver. If you later need to
remove the 15-pin connector cable, first remove AC power. Connecting and
disconnecting the 15-pin connector cable in the absence of power will avoid
making or breaking powered signal connections.
Page 33

System Components 33
Once connected to the mirror head and to the wall outlet, the FSM-CD300B
controller/driver may be turned on using the POWER switch located on the
left side of the front panel (see Figure 16).
Figure 15: 15-pin interface cable from controller to mirror head.
6.3 Command Inputs
Control voltages called “Command Inputs” are used to direct the mirror to
specified angular positions around two orthogonal axes. These voltages are
normally applied to the two BNC connectors labeled COMMAND INPUTS
X and Y on the front panel, but can also be applied to the 25-pin INTER-
FACE I/O connector on the front panel. Please see Figure 16. Scaling is
set so that ±10V DC offsets correspond to the full-scale motion of ±1.5° (±26
mrad) mechanical angular range on each axis. A command voltage of zero
will bring the mirror to the powered-on null position for that axis.
Y inputs are differential. Neither lead of the BNC connector is grounded.
Figure 16. Front panel I/O connections.
The X and
Certain FSM system output results (overshoot, settling time and point-topoint travel path) are dependant upon the input waveform, amplitude and
frequency of the signal. Due to the many possibilities, customers are
encouraged to experiment with their particular drive signal parameters when
Page 34

34 System Components
optimizing their application. As a practical guide, a well-defined, smooth
sinewave input will generate the best output results.
Self-heating of the mirror drive coils is proportional to command signal
amplitude and to the square of frequency.
tion section of this manual for the Safe Operating Area before driving your
FSM system near its frequency versus amplitude maxima. The gain and
phase response as a function of frequency for typical FSM systems are shown
in Figures 3 & 4.
6.4 Position Outputs
If confirmation of mirror position is desired, the position angle sensors can
be monitored at the Position Output pins (pins 18 and 20) of the 25-pin
INTERFACE I/O connector on the front panel. A full-scale deflection of
±1.5º on either axis corresponds to a ±10 V output swing. Zero volts output
corresponds to a powered-on null, or 0º.
Consult Figure 5 in the specifica-
6.5 Fault Indication
Two LED fault indicator lights on the front panel, labeled CURR and TEMP,
are used to indicate overheating of the drive coils, as measured separately by
thermistors for the X and Y axes.
• The yellow CURR warning indicator light comes when the temperature
of the drive coils has reached a warning threshold as a result of applying
too high an RMS drive current. In the event that the yellow light comes
on during continuous system operation, decrease the amplitude and/or
frequency of the drive signal.
• The red TEMP shut-off light comes on when thermistors have reached
the shut-off temperature threshold, above which the over-temperature
condition would damage the coils. While the red light is on, the mirror
will be in the unpowered state. Upon cooling of the coils, the red light
will go off, and the system will automatically resume normal operation.
In the event that the red warning light comes on during continuous system
operation, decrease the amplitude and/or frequency of the drive signal.
Also check for possible inverse polarity of an External Feedback signal.
Page 35

System Components 35
Figure 17: Model FSM-CD300B controller/driver front and rear panels
6.6 External Sensor Feedback Control Mode
The Model FSM-CD300B controller/driver can be used in an External Sensor
Feedback Control mode with position feedback from an external sensor, such
as a quad cell or lateral effect cell. This allows the FSM to lock a laser beam
onto a target such as the center of a quad cell. The default alternative is the
Internal Control mode, which utilizes a quad cell sensor built into the mirror
head and feeds the error signal back to the controller/driver via the system’s
15-pin, 3-foot interface cable.
A beam stabilization system with external position feedback sensing is shown
in Figure 18. To switch system operation to External Feedback Control from
the Internal Control, a high TTL-level signal must be applied to the INT/EXT
selector switch (Pin 17) of the 25-pin INTERFACE I/O connector. External
Feedback inputs can then be applied to Pins 11, 12, 15 and 16. Returning the
signal on Pin 17 to a low state will switch the FSM back to Internal Control.
In the illustration in Figure 18, a Logic Unit (supplied by the user) provides
the TTL-level signal for locking the FSM onto the quad cells. The sum of
the outputs from the quad cell determines whether sufficient light is on the
detector. If light is sufficient, the Logic Unit switches the FSM’s to External
Feedback Control and cancels out the tilt errors. If light is insufficient, the
Page 36

36 System Components
Logic Unit keeps the FSM’s on Internal Control and flags an error to the
operator.
The external feedback signals should be scaled so that ±10V yields ±26 mrad
of mechanical rotation. Care needs to be taken to align the external sensors so
that X and Y rotation axes of the FSM correspond to the correct X and Y
outputs of the quad / lateral effect cell amplifier.
Reference position voltages can be applied to the Command Inputs so that if
the INT/EXT selector switch voltage input returns to Internal Control mode,
the FSM will move to a defined position. Otherwise the mirror will return to
the powered-on null position.
See Application Notes 2 and 23 for additional information on active beam
stabilization.
Figure 18: FSM configured with external feedback sensor for laser beam stabilization.
6.7 Open Loop Control Mode
The Model FSM-CD300B controller/driver can be used in Open Loop mode,
which does not make use of External or Internal feedback signals. The Open
Loop mode is selected by applying a high TTL-level signal X_OL_SW
selector switch for X (Pin 9) and/or Y_OL_SW selector switch for Y (Pin
10). The Open Loop command signals are applied to the X_OL_CMD input
Page 37

System Components 37
for X (Pin 22) and/or Y_OL_CMD input for Y (Pin 24). These input are
single-ended. Ground pins are adjacent on Pins 23 and 25.
The Open Loop mode allow users to develop their own control systems.
In this mode, the FSM-CD300B controller/driver is only used as an
amplifier/driver, which converts voltage signals to current to drive the coils.
6.8 Maintenance & Service
Clanging sounds from the mirror head are normal when the unit is first turned
on, when a high step function is applied, or when the mirror is unpowered
and is shaken by hand. Such sounds are normal and occur when the mirror
hits its hard stops. They are not a sign of malfunction.
The FSM system does not require periodic maintenance or calibration. There
is no reason for a user to ever open the FSM-CD300B Controller/Driver unit.
Opening the unit would break a label and void the warranty. The only reason
for a user to open the FSM Mirror Head would be to replace the mirror. Any
repairs, if necessary, are to be done by Newport Corporation.
To clean the FSM-CD300B Controller/Driver unit, first unplug the unit. Then
wipe the exterior using a damp, soft cloth. Do not use solvents or detergents.
The best way to maintain cleanliness of the mirror is to protect it from dirt
in the first place. If the Mirror Head Assembly is to be stored, always install
the protective metal cover, as described in the section “Unpacking the FSM.”
Also, store the Mirror Head Assembly in a hermetically sealed zipped bag.
The mirror surface is delicate and scratches easily. A qualified optics
professional should do any mirror cleaning. To remove loose dust,
gently
blow across the optical surface using a can of optical-grade compressed air.
You may also
gently brush the surface with a clean, optical-grade dust brush.
In case of heavy contamination that would interfere with the operation of the
FSM system, a qualified optics professional may remove the front cover and
attempt to use some of the techniques described in the section “Care &
Cleaning of Optics” in Newport’s product catalog, the Newport Resource.
In case of any mechanical contact with the optical surface, some scratches
are unavoidable.
Page 38

Appendices 38
7. Appendices
7.1 Appendix A – Troubleshooting the FSM System
Problem Possible Cause & Solution
Mirror does not respond to command
inputs. Green PWR indicator light is
off.
Mirror does not respond to command
inputs. Green PWR indicator light is
on.
Yellow CURR indicator LED is on.
The drive signals to the mirror are
clipped.
Red TEMP indicator LED is on.
Mirror does not respond at all.
Controller does not receive power. Assure that power plug is live,
that power switch is ON, and that fuses (located above power
connector) are good.
+5V is applied to the INT/EXT selector switch input (Pin 17),
causing the system to expect External Feedback inputs (Pins 11,
2, 15, 16). Or +5V is applied to Open Loop selector switch inputs
(Pins 9 or 10), causing the system to expect Open Loop inputs
(Pins 22, 24). Remove the +5V source or supply control voltages
on the required pins.
The attempt is made to apply to much RMS current to the FSM
drive coils, which would create a potential over-temperature
condition. Decrease amplitude and/or frequency of drive signal.
Thermistors have detected an over-temperature condition of the
drive coils because these are being driven too hard. Decrease
amplitude and/or frequency of drive signal. Also check for possible inverse polarity of an External feedback signal. System will
automatically resume normal operation once coils have cooled.
Mirror moves in opposite direction of
intended.
Polarity is reversed at X and Y Command Inputs or X and Y
External Feedback Inputs. To remedy, reverse your electrical
connections, since the above four inputs are differential without
a fixed ground.
Page 39

Appendices 39
7.2 Appendix B – Abbreviations
FSM
D-A
IR
NIR
Fast Steering Mirror
Digital to Analog
Infrared
Near Infrared
7.3 Technical Support
North America & Asia
Newport Technical Support Department
1791 Deere Ave.
Irvine, CA 92606, USA
Tel: (949) 863-3144, (800) 222-6440
Fax: (949) 253-1680
Email: tech@newport.com
Europe
Newport / Micro-Controle S.A.
11 rue du Bois Sauvage
91055 Evry Cedex, France
Tel: 01-60-91-68-68
Fax: 01-60-91-68-69
Email: france@newport-fr.com
Technical Support Information
When calling Newport Technical Support with a technical issue or problem,
please be prepared to provide the following information:
• Your contact information.
• System serial number or original order number.
• Description of problem.
• Environment in which the system is used.
• State of the system right before the problem.
• Can you identify anything that may have caused the problem?
• Can the system continue to operate, or is it non-operational?
• Frequency and repeatability of problem.
Page 40

40 Appendices
7.4 Service & Returns
North America & Asia
Newport Service & Returns Department
1791 Deere Ave.
Irvine, CA 92606, USA
Tel: (949) 253-1694, (800) 222-6440 ext. 31694
Fax: (949) 253-1479
Email: rma.service@newport.com
Europe
Newport/Micro-Controle S.A.
11 rue du Bois Sauvage
91055 Evry Cedex, France
Tel: 01-60-91-68-68
Fax: 01-60-91-68-69
Email: france@newport-fr.com
Service & RMA Information
The user should not attempt any maintenance or service of the FSM Fast
Steering Mirror System beyond the procedures outlined in this manual. Any
problem that cannot be resolved should be referred to Newport’s Service &
Returns Department, and any failed product should be returned to that department for service. A Return Materials Authorization (RMA) number must be
obtained in advance and should be stated on the outside of the shipping box.
To obtain an RMA number, please fill out and fax back the Return Material
Authorization Request form included at the end of this manual.
Packaging for Returns
Any FSM Fast Steering Mirror Head or FSM-CD300B Controller/Driver
being returned under an RMA must be securely packaged for shipment. The
RMA number must be stated on the outside of the shipping box. If possible,
reuse the original factory packaging. The mirror must be secured for shipment. Please contact Newport’s Service & Returns Department if you no
longer have the original shipping restraints for the mirror.
Page 41

Appendices 41
7.5 Appendix C – Return Material Authorization Request
Newport Corporation, Returns Department, 1791 Deere Avenue, Irvine, CA 92606
Tel: 800-222-6440 FAX: 949-253-1479
Email: rma.service@newport.com Web: www.newport.com
Newport RMA #: R (assigned by Newport Corporation)
Name: Date:
Telephone #: Fax:
Email:
Company Name:
Ship to Address Line 1:
Ship to Address Line 2:
Ship to City:
Ship to Country: State: Zip Code:
YES NO
If Warranty Repair or Replace, complete this section
Date of your original purchase.
C Original Newport sales Order number (begins with C).
Your Original Purchase Order number.
YES NO Has this product been used?
YES NO Would you like a refurbished replacement if available?
YES NO Is this product being returned for Credit only?
Credit only is not an option for Newport W are ho usi n g Divisions.
YES NO
If Non-Warranty Repair or Replace, complete this section
Purchase Order number (approval required before invoicing)
YES NO Detector Calibration (will include functional check of power meter)
YES NO Power Meter Calibration
What Company name should be on the Calibration Certification?
YES NO Would you like to be quoted a refurbished replacement if available?
:
:
PRODUCTS BEING RETURNED (LIST VALID NEWPORT PART NUMBERS)
Part Number Description S/N Qty Declared value
$
$
$
$
$
Reason for Return and detailed explanation of problem:
Totals
$
Page 42

Filename: FSM-300 Users Manual rev F.doc
Directory: M:\Manuals by PN\40342-01 Rev D FSM-300\native files
Template: C:\Newport\Newport Manual Template.dot
Title: 1
Subject:
Author: Harald H. Weiss
Keywords:
Comments:
Creation Date: 9/7/2011 4:01:00 PM
Change Number: 2
Last Saved On: 9/7/2011 4:01:00 PM
Last Saved By: Patricia Magdaleno on workstation USIRV-TRAINOR
Total Editing Time: 22 Minutes
Last Printed On: 9/7/2011 4:02:00 PM
As of Last Complete Printing
Number of Pages: 41
Number of Words: 7,465 (approx.)
Number of Characters: 39,418 (approx.)
 Loading...
Loading...