

Page 1
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Page 2

Motortronics
Page 1
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
1 Introduction ............................................................................................................................................... 2
1.1 General ............................................................................................................................................... 3
1.2 Theory of Operation ............................................................................................................................ 3
1.3 Braking Sizing and Selection .............................................................................................................. 3
1.4 Applications ........................................................................................................................................ 4
1.5 Where Mechanical Brakes Should be Used ....................................................................................... 5
1.6 ABC Model Numbers, Ratings and Dimensions ................................................................................. 6
2 Operation ................................................................................................................................................ 12
2.1 Sequence of Operation ..................................................................................................................... 12
2.2 Fault Conditions ................................................................................................................................ 14
2.3 Mechanical Brake Control ................................................................................................................ 15
3 Installation ............................................................................................................................................... 16
3.1 Fault History ...................................................................................................................................... 16
3.2 Fault Code Table .............................................................................................................................. 16
3.3 Event Records .................................................................................................................................. 16
4 Wiring ...................................................................................................................................................... 17
4.1 Introduction ....................................................................................................................................... 17
4.2 Line and Load Connections .............................................................................................................. 17
4.3 Control Connections ......................................................................................................................... 20
5 Adjustements ......................................................................................................................................... 23
5.1 Time Adjustment Procedures ........................................................................................................... 23
5.2 Jog Time Adjustment ........................................................................................................................ 23
5.3 Brake Time Adjustment .................................................................................................................... 24
5.4 Brake Current Adjustment ................................................................................................................ 24
Table of contents
6 Start-Up................................................................................................................................................... 26
6.1 Start-up Check List ........................................................................................................................... 26
6.2 Equipment ......................................................................................................................................... 26
6.3 Setup Sequence ............................................................................................................................... 26
6.4 Check Normal Sequence of Operation ............................................................................................. 26
APPENDIX A: TECHNICAL SPECIFICATIONS ........................................................................... 27
WARRANTY INFORMATION ....................................................................................................... 29
Page 3
Motortronics
Page 2
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Your Role in Product Safety
This equipment is designed and manufactured to the highest standards to provide safe and reliable operation
for its intended use. Only qualified personnel should install, maintain, and service this equipment, and only after
reading and fully understanding all of the information in this manual. All instructions should be strictly followed.
All Warnings, Cautions, and Notes must be taken into account for your particular installation. Users should
consult Motortronics or a Motortronics distributor/service centre if there are any questions.
All installation instructions may be superseded by applicable local, regional, or national electrical codes.
Drawings, application information, and technical representations included in this manual are for typical
installations, and should not in any way be considered specific to your application or conditions. Consult
Motortronics for supplemental information if necessary.
Contents of this manual are believed to be correct at the time of printing. In following with our on-going
commitment to meeting customer needs and developing our products to suit them, Motortronics reserves the
right to change specifications of this product and/or the contents of this manual without notice. As a result,
supplemental data sheets and/or drawings may be associated with this equipment. Please contact Motortronics
and have the unit serial number available if you notice conflicts with what is depicted in the manual and what is
installed in the field.
Phasetronics (dba Motortronics) accepts no liability for any consequences resulting from inappropriate, negligent,
or incorrect installation, application, adjustment, or maintenance of this equipment.
Notice Label
Explanation:
W
ARNING!
Warning labels such as this denotes specific
area of the
manual.
These
statements
are
intended
concerns
to be
for
life/
safety/damage
followed without exception.
issues associated with this
CAUTION!
Caution labels are
under
circumstances as described.
responsible
intended
for
identifying
to alert the user to
These items are
the
applicable installa
specific
critical
tion
issues.
issues that MAY cause damage or
in some
installations
but
not
personnel
all. The user is
risks
NOTE: Notice labels are
to the proper use and
intended
long
term
to alert the user to issues that require particular
reliability
of the
equipment.
attention
with regard
Page 4

Motortronics
Page 3
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
1 About the Motortronics ABC Series
1.1 General
The ABC Series is a solid state DC injection brake for stopping three- phase AC induction motors. This full-wave
DC brake design offers smooth, low peak level braking for quiet, steady operation and optimal performance.
Designed to handle even high inertia loads, the ABC Series eliminates costly and potentially dangerous "coastto- stop" times. A built-in microprocessor provides system supervision that includes digital timing control for
jogging and braking.
The integral Operator Interface Module provides LED indication of the unit's operating status and easy
adjustments for quick setup. Standard features include interlocks and mechanical brake release relays, a brake
disable input and zero speed sensing with override.
1.2 Theory of Operation
Incoming AC power is fed to terminals L1 and L2 directly from the line side of the motor starter terminals and is
converted to DC within the ABC Series. Once the motor starter has been turned off (opened) and the residual
energy in the motor has dissipated, the DC current from the ABC Series is applied (injected) to starter terminals
T1 and T2 respectively. This creates a stationary magnetic field in the AC motor stator windings.
The braking torque will increase in proportion to the amount of current allowed to flow. (The DC injection level
can be adjusted using the Brake Current Potentiometer on the operator interface module. This modulates the
applied voltage based upon an "RMS" closed loop current feedback signal from the integral sensors.) The rotor
then pulls into alignment with this stationary field and brings the load to a stop faster than if it coasted to a stop.
1.3 Brake Sizing and Selection
ABC Series brakes are suitable for use in most AC motor applications where coast-to-stop times are undesirable
or unacceptable. The ABC Series is a current controlling brake, so various sizes of brake units can be applied to
various motor sizes. Because DC injection means applying power to the AC motor after turning it "Off", motor
heating (although minimal) will continue during the braking cycle and should be considered when selecting the
motor. AC motor manufacturers recommend that each braking cycle over 100% FLA be considered as an
additional starting cycle when calculating the starts- per-hour ratings for the selected motor.
If the selected ABC
start cycles for these calculations (and 300% FLA = 3
exceed 400% of the motor nameplate FLA without first consulting the motor manufacturer. Additional guidelines
for applying ABC Series brakes follow:
Series
is sized to deliver 200% of motor rated current, consider each brake cycle to be 2
"starts"
per brake). Never size any DC injection brake to
Page 5

Motortronics
Page 4
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
1.3.1 Standard Duty Sizing
Applying an ABC Series brake that is rated for <115% of the
maximum length of braking time without exceeding the thermal capacity of the stator windings. Since current is
controlled by the ABC
impedance decreases with speed. Braking torque will be highest at the beginning of the cycle, and can be as
much as 100% of the FLT (Full Load Torque) when set to motor FLA.
As the motor slows, the braking torque slowly decreases, reducing the mechanical stresses as much as
possible. Sizing a brake in this manner is typically good for machine tools, saws, conveyors, lumber machinery,
and most chippers where the coast-to-stop time does not exceed 5 minutes. Stop times vary greatly with load
and friction, but can be expected to be 1/2 of the coast-to-stop time or less. Keep in mind that the maximum
brake time is setting is 127 seconds. In heavily loaded, high inertia machines and long coast-to-stop times, the
Standard Duty model may not stop the load. Consider using the Extra Duty rating instead.
Series
throughout the braking cycle, braking torque will vary as the motor circuit
FLA
(Full Load Amp) rating of the motor allows
1.3.2 Extra Duty Sizing
For heavier machine loads such as large chippers, punch presses and other flywheel based machines, selecting
an ABC Series brake based on 200-250% of the motor nameplate FLA allows faster braking. The maximum
developed braking torque can be as much as
200% of the motor rated Full Load Torque. In this case, the load can typically stop in twice the Across-the-Line
starting time. Duty cycling of the motor is a much more important consideration in applications since additional
thermal stresses due to higher current levels are applied to the motor.
1.3.3 Custom Sizing
Extreme loads (such as overhauling conveyors or large centrifuges), or short stop times (approaching the
across-the-line starting time of the motor) may require sizing the ABC Series for 300% of the motor FLA or
greater, and should be done with careful consideration of motor heating, duty cycle, and limitations of
mechanical stress on the drive train components.
1.3.4 Emergency Stopping
An ABC Series brake used in conjunction with a mechanical brake should be considered if the stop times must
be equal to or shorter than the across-the-line start time, consider using and ABC
with a mechanical brake.
Series
brake in conjunction
Page 6
Motortronics
Page 5
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
1.4 Applications
The ABC Series electronic brake is ideal for machine and process equipment control applications for efficiency,
increased safety, and reduced equipment maintenance costs. Among the benefits:
Efficiency
batch loading, or maintenance shutdowns. Productive time increases as overall operating costs decrease
because the load stops more quickly. The ABC Series eliminates the common practice of jamming the load to a
stop which seriously reduces the life and effectiveness of saw blades, molding heads, and knives.
Increase Safety by eliminating the need to "jam-stop" equipment. This will prevent any personnel injuries
caused by kickbacks and broken blades. Use the ABC Series in conjunction with safety inter- lock devices to
stop the motor as quickly as possible, reducing the risk of contact with dangerous rotating elements of
machinery. Prevent premature wear or component failure and eliminate the need for hasty repairs that can put
maintenance personnel in potentially dangerous situations. ABC Series brakes can be used as part of a system
to facilitate OS H A General
exposed to hazardous moving parts. They can also be utilized to satisfy braking requirements of the British
Columbia Workers Compensation
as planers, chippers, and hogs.
Reduce maintenance costs by using the ABC Series. Eliminate the need to plug-reverse a load and reduce
the associated damage to gear boxes and other power train components. The ABC
or slow down the load in one direction before reversing to the other. On machines where mechanical brakes are
used to stop or hold a load, use the ABC Series to stop it first, then set the mechanical brake as a "parking
brake". This eliminates the normal wear and tear to the brake pads or shoes. On loads such as vibrating
feeders, screens, or separators, damage from mechanical harmonics that occur during coast-down can be
eliminated by using an ABC Series. It allows the motor/load to quickly pass through any dangerous speeds and
come to a stop.
is improved because you no longer have to wait through long coast-to-stop times for blade changes,
Industry Standards (
Amendment Act
29 CFR1910 Subpart O) requiring that workers not be
(Book 3 Part 27.42) for rotating knife machinery such
Series
can be used to stop
1.5 Where Mechanical Brakes should be used
Power loss
the braking cycle. If the incoming line power is lost from the utility, an upstream circuit protective device trips, or
an emergency shutdown routine is initiated, no braking will take place. If braking is still necessary for safety
reasons (even in the event of a power failure), consider using mechanical brakes as a backup device. Under
normal operation conditions, the ABC Series stops the load and the mechanical brake holds it.
during braking
- The ABC Series, like all DC injection brakes, requires power to be applied during
Holding
motor comes to a complete stop and therefore CANNOT BE USED AS HOLDING BRAKE. If braking must be
applied continuously while the load is at rest, mechanical "Parking Brakes" are required. The ABC Series
includes a Mechanical Brake Release Relay to facilitate proper coordination of the mechanical brake in these
applications.
Stop times
energy to dissipate from the windings before DC current can be applied (otherwise damage to the brake or
circuit devices may occur). The length of this "wait state" depends on the motor's residual magnetism and the
motor frame size, but can be as much as 5 seconds. This, combined with the limits on braking torque, makes DC
injection braking ineffective if braking time must be shorter than the starting time (Across-the-Line).
the load after it comes to a stop - All DC injection brakes inherently lose braking torque when the
shorter
than start times - Like all DC injection brakes, the ABC Series waits for the residual motor
W
ARNING!
DC
Injection
Mechanical Brake
use in these
brakes cannot be used for
Release Relay that can be used to
applications.
holding
a load after
coordinate
it
comes to a stop. The ABC Series
the
operation
of a
mechanical
includes
brake for
a
Page 7
Motortronics
Page 6
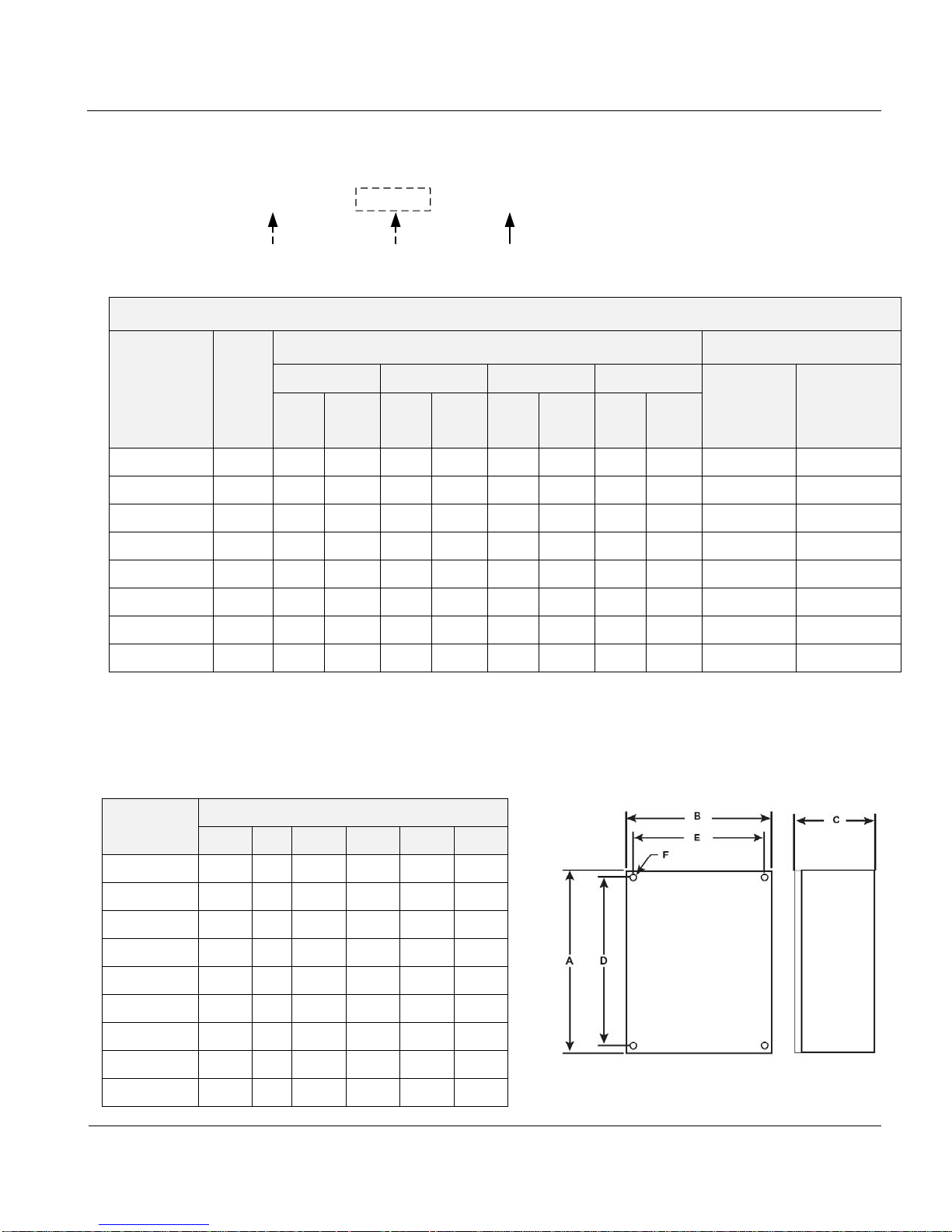
ABC - 200 - - E
Voltage
240 = 208 – 240V, 400 = 380 – 415V
480 = 440 – 480V, 600 = 575 – 600V
Enclosure
P = Panel Mount
E = NEMA 4/12 Sealed
Max. Brake Amps
50 – 1000 A.
ABC SERIES
Model
Number*
Max
Amps
Typical Horsepower Usage
Dimensions
208 V
240V
480V
600V
Panel
Dim Ref.#
NEMA 4/12
Dim Ref. #
Std.
Duty
Extra
Duty
Std.
Duty
Extra
Duty
Std.
Duty
Extra
Duty
Std.
Duty
Extra
Duty
ABC-50
50
15
7.5
20
10
40
25
50
30 2 7
ABC -100
100
30
20
40
25
75
50
100
60 2 7
ABC-200
200
75
40
75
50
150
100
200
125 3 8
ABC-300
300
100
60
125
75
250
150
300
200 4 9
ABC-400
400
150
75
150
100
350
200
400
250 4 9
ABC-550
550
250
125
200
150
500
300
600
350 5 10
ABC -800
800
350
200
350
200
700
450
900
500 5 10
ABC-1000
1000
400
250
400
300
900
500
1000
600 5 10
Dim
Ref. #
Dimensions (Inches)
A B C D E
F
2
10.5
7.9
7.2
10
6.8
0.21
3
16.5
10
10
15.9
9
0.28 4 16
16
10
15
15
0.5 5 21
26
10.4
20
25
0.5 6 16
12 9 14.5
10.5
0.5 7 20
16 9 18.5
14.5
0.5 8 24
20
16
22.5
18.5
0.5
9
36
24
16
34.5
22.5
0.5
10
36
30
16
34.5
28.5
0.5
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
1.6 ABC Series Model Number, Rating and Dimensions
NOTES:
1. Never exceed the Full Load Amp rating of the motor without checking the motor manufacturer's data
with regards to appropriateness of the application and duty cycle.
2. If duty cycle is not known, Motortronics recommends using the Extra Duty Brake since braking current
can be adjusted down to meet the actual load requirements.
Page 8
Motortronics
Page 7
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
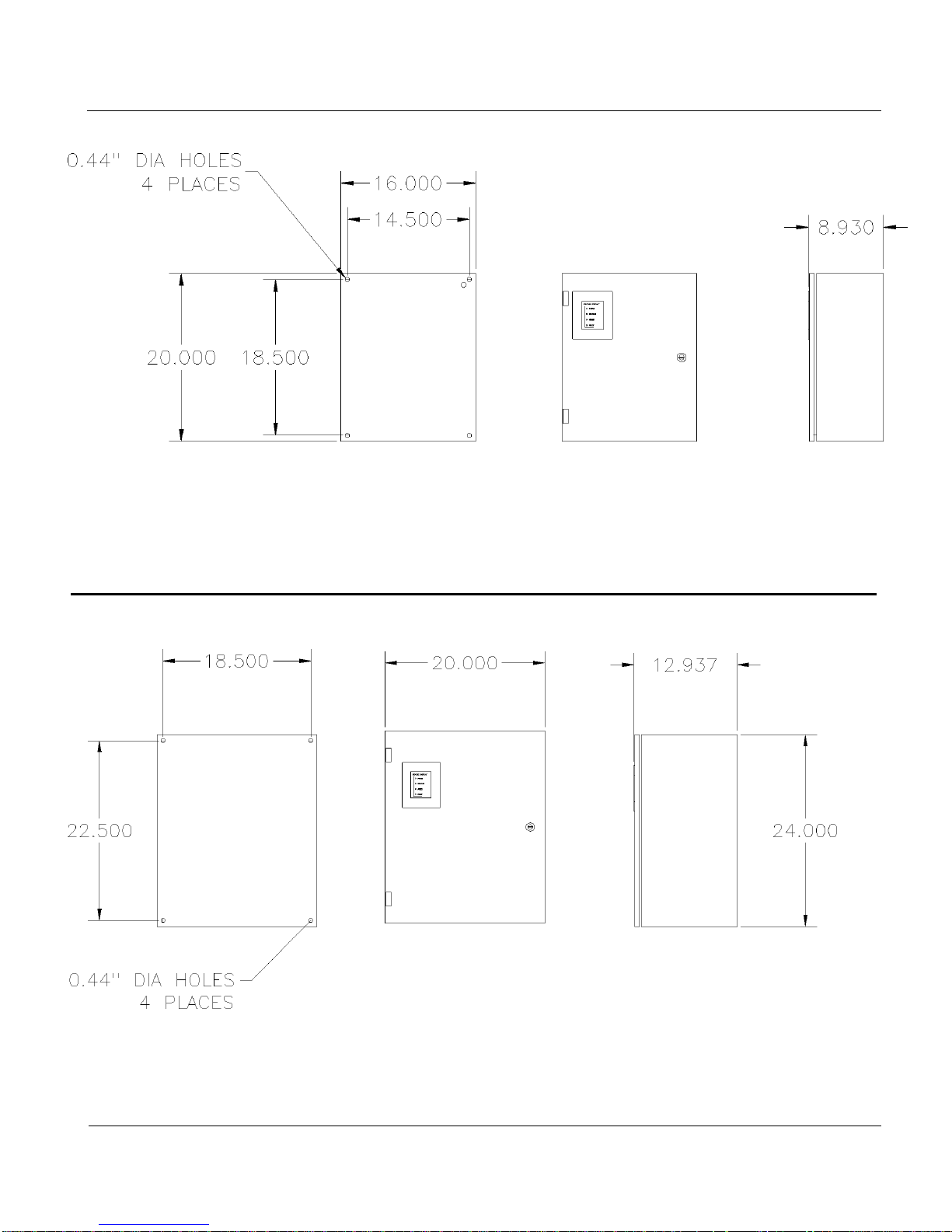
N4/12 Outline: ABC-50/100-E
N4/12 Outline: ABC-200-E
Page 9
Motortronics
Page 8
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
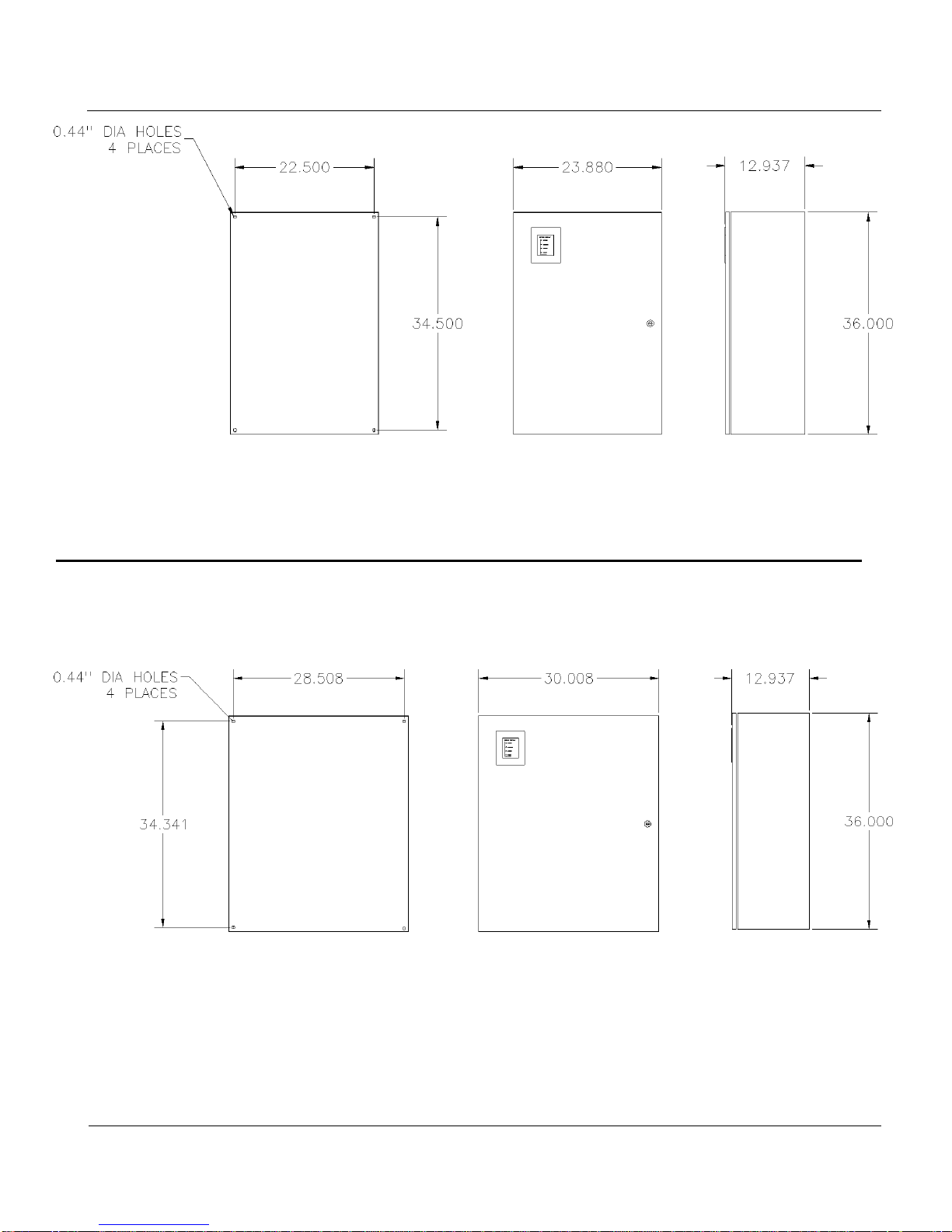
N4/12 Outline: ABC-300/400-E
N4/12 Outline: ABC-550/800-E
Page 10

Motortronics
Page 9
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Panels Outline: ABC-50/100
Panels Outline: ABC-200
Page 11

Motortronics
Page 10
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Panels Outline: ABC-300/400
Panels Outline: ABC-550/800
Page 12

Motortronics
Page 11
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Panels Outline: ABC-1000
Page 13

Motortronics
Page 12
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
2 Operation
2.1 Sequence of Operation
The ABC Series brake becomes "Armed" when the motor starter turns "On” and then braking occurs when the
starter is turned "Off". An Operator Interface Module has two large LEDs to indicate "Braking" or "Fault"
condition, plus six smaller LEDs to indicate the following modes of operation:
2.1.1 “Power On”
The ABC Series brake is self-powered from the available motor branch circuit as derived from Terminals L1 and
L2. If fuses are used, this LED will indicate a blown fuse condition in either of these circuits by being off when
power is applied to the starter (see section 4.2.1). This LED does NOT indicate motor starter or ABC Series
brake unit operational status.
2.1.2 Jog / Armed
The ABC Series receives a Brake Command from an input wired to the motor starter which indicates the starter
status (see section 4.3.1). The ABC Series can be programmed to wait a period of time before going into the
"Armed"
time with- out the braking cycle interfering. (The "Jog" time is set via the "Jog Time" dip switches.) This LED will
flash once per second until the end of the jog time. If the Motor Starter is turned off again while the ABC Series
is still in the "Jog" mode, the brake will NOT arm and DC injection will not take place (setting this time to zero
will turn off this feature). After the "Jog Time" expires, the ABC Series will enter the "Armed" mode (indicated
when the JOG/ARMED LED illuminates in a steady state). The ABC Series is now ready to begin DC injection
braking the next time the motor starter is turned off. The "Armed" mode has no time limit and will be
maintained for the duration of the motor run time.
condition using the "Jog" feature. This feature allows for user setup and testing of systems during the jog
Page 14

Motortronics
Page 13
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
2.1.3 “Braking”
The ABC Series will enter the braking mode when the motor is given a stop command after being "Armed" (see
"JOG / ARMED" above). To prevent damaging current spikes, a factory programmed delay allows the existing
motor magnetic field to decay before DC is applied (see section 5.1). During the "BRAKING" mode, a set of N.C.
interlock contacts change state and disable the motor starter control circuit during the braking cycle (see section
4.2.2).
The ABC
Interlock Relay and monitors the Zero Speed Sense Circuit. Braking will continue until the first one of three
events occurs: 1) the Zero Speed Sense circuit determines the motor has stopped, 2) the "Brake Time" expires,
or 3) the unit receives a "Brake Disable" signal input. When braking is complete, the
Interlock Relay and is ready for another cycle.
Series
begins injecting a regulated DC braking current and simultaneously digitally times, controls the
ABC
Series releases the
2.1.4 Brake OFF
This LED illuminates whenever the ABC Series is not actively braking (either because the motor is on or the
previous braking cycle has been completed). The ABC Series provides a built-in, closed-loop sensing circuit that
accurately determines when the motor has stopped based on the subtle signals received from the unused motor
winding. If the Zero Speed Sensing circuit determines that the motor has come to a stop before the Brake Time
has expired, it will override the brake time setting and shut the ABC Series off. The "BRAKE OFF" LED will then
illuminate. NOTE: Since the Brake Time may expire prior to the Zero Speed override coming into play, this
circuit should not be used as a true Zero Speed indicator.
W
ARNING!
The ABC Series DC
will result in the
to a stop is
pro
vided as a backup system. The ABC Series brake offers a Me
for this
critical regardless
purpose.
loss
Injection
of
Brake
braking ability,
requires
of the
AC power for
which can be
avail
ability
hazardous
of
brak
electrical
chanical
ing. Power loss before or
to
personnel and/or equipment.
power,
mechanical braking should
Brake Release Relay
during braking
If
braking
be
specifically
Page 15

Motortronics
Page 14
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
2.2 Fault Conditions
The “FAULT” LED will illuminate when any of the following conditions occur:
2.2.1 “Disabled”
The "DISABLED" mode is activated when the ABC Series receives a command on the Brake Disable input (a
N.O. dry contact at TB1) (see section 4.3.2). This mode can be used to remove the electronic brake from the
system, and is useful in applications that only require braking at certain times during the process and during
system setup. Note: The ABC Series is a "smart brake" and will sense a running motor and automatically arm
itself if released from the "DISABLED" mode. Under these circumstances, the ABC Series will go through the
"JOG" and
normal ready state.
"ARMED"
sequence again. If the unit has determined the motor is stopped, the brake will return to the
NOTE: The ABC Series
brake unit is
disabled
Mechanical
during
the
Brake Release Relay will
braking mode.
set
the
mechanical
brake if the ABC Series
2.2.2 “Wiring Error”
The ABC Series unit will recognize when the interface connections or monitored signals are not correct with
respect to the proper operation sequence. If the brake detects a miswire or an improper sequence of events, it
will "self-disable" to prevent any conflicts with the existing systems and indicate "WIRING ERROR". If this
occurs, the "Fault" LED and "Wiring Error" LEDs will illuminate. Once the miswire or wrong sequence is
corrected, the brake will automatically enable itself and resume normal operation.
2.2.3 “Over Temp”
The ABC Series has thermal sensors built into the heat sink assembly. If the heat sink approaches temperatures
too high for the SCRs, the sensors will cause a Fault and illuminate the "Fault" and "Over Temp" LEDs.
Page 16

Motortronics
Page 15
OPERATION
RELAY STATUS
Power On
No Change (de-energized)
Jog / Armed
Energizes (follows motor starter coil)
Braking
Remains energized
Braking Time Completed /
Zero Speed Override
De-energizes
Disabled – Before or During Jog / Armed
Remains Energized (follows motor starter coil)
Disabled – During Braking
De-energizes
Fault
De-energizes
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
2.3 Mechanical Brake Control
The ABC Series includes a Mechanical Brake Release Relay that can be utilized to control an electromechanical brake coil. This relay has a Form “A” contact (1 N.O.) that changes state as follows (see section
4.3.4):
Page 17

Motortronics
Page 16
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
3 Installation
3.1 Receiving and Unpacking
Upon receipt of the product you should immediately do the following:
• Carefully unpack the unit from the shipping carton and inspect it for shipping damage.
• Verify that the model number on the unit matches your purchase order.
• Check all electrical terminals to be sure screws are tight.
3.2 Initial Unit Inspection
Complete a visual check of the unit for damage which may have occurred during shipping and handling. Report
any damage immediately and file a claim with the freight carrier within 15 days of receipt. Do not attempt to
continue installation.
CAUTION!
Do not operate or
may result in
install
per
sonnel injury or
the ABC Series Brake if it appears to be damaged or
equipment damage.
visually
defective. Doing so
3.3 Location
Proper location of the ABC Series is necessary to achieve specified performance and normal operation lifetime.
The unit should always be installed in an area where the following conditions exist:
• Ambient operating temperature:
Chassis unit: 0 to 50°C (32 to 122°F)
Enclosed unit: 0 to 40°C (32 to 104°F)
• Humidity: 5 to 95% non-condensing
• Free from metallic particles, conductive dust and corrosive gas
• Free from excessive vibration (below 0.5G)
• Open panel units must be mounted in the appropriate type of en- closure. Enclosure size and type must be
suitable to dissipate heat generated by the unit. Contact factory for details.
3.4 Mounting and Cleaning
The unit is air cooled and must be properly mounted to allow for unrestricted airflow across the heat sink. The unit
should be mounted with the heat sink fins in a vertical plane, with a minimum of five (5) inches (127mm) of free
space around the unit for adequate ventilation. The ambient air should be free of any contaminants which can
clog louvers or coat the unit. As with all electrical equipment, the unit must be protected from water and
condensing humidity to prevent damage to the unit. In damp or cold environments, space heaters may be
required.
W
ARNING!
Remove All Sources of Power Before Cleaning the
should be cleaned on a regular basis to ensure proper cooling. Do not use any chemicals to clean the
unit. To remove surface dust, use 80 to 100 psi clean, dry compressed air only. A three inch, high
quality, dry paint brush is helpful to loosen up the dust prior to using compressed air on the unit.
Unit.
In dirty or contaminated atmospheres the unit
Page 18

Motortronics
Page 17
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
4 Wiring
4.1 Introduction
• Installation of the brake unit should be done by properly qualified personnel.
• Check local and other applicable codes to ensure that all installation requirements are met prior to operation.
• Prior to beginning the installation, verify that the motor and brake unit have the same voltage ratings.
• Check the unit to verify that it is rated for the appropriate current (approximately equal to the motor FLA if
sized for Standard Duty - see section 1.3).
W
ARNING!
Do not service
shock hazard,
terminals, enclosure
equipment
disconnect
and
with voltage a
main power before
control
panel
to meet local
pplied!
working
Unit can
codes.
be
source of fatal
on the unit. Warning labels must be attached to
electrical shocks!
To avoid
4.2 Line and Load Connections
Power conductors for the Line and Load connections should be, at a minimum, sized at 125% of the current
rating. Brake sizing and duty cycling should be considered when determining if conductors should be oversized
for your application. For example, high torque, fast stop applications with maximum duty cycle may require
conductors sized for the maximum output capability of the ABC Series, and motor lead wires should match.
Page 19

Motortronics
Page 18
UNIT RATING
SCPD
SCPD SIZED AS % OF ABC
UNIT RATING
10 – 100 Amps
Class RK5 Fuse
Class J Fuse
Circuit breaker
No greater than 250%
No greater than 400%
No allowable (fuses required)
200 – 1000 Amps
Class RK5 Fuse
Class J Fuse
No greater than 250%
No greater than 400%
Circuit breaker
No greater than 250%
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
4.2.1 Line Power Connections
Connect the line leads to the input terminals L1 and L2 provided on the unit. The line power must be supplied
from a source with suitable Short Circuit Protective Devices (SCPD) conforming to local and national electric
codes. Additional fusing is necessary only when the motor circuit is fused at a level too low to protect the ABC
Series per code. Recommendations for commonly available SCPDs are as follows:
W
ARNING!
Many motor safety
disconnect
switch
disconnect switches
with one that is rated for DC voltage at the motor line
alternative, disconnect incoming line
motor
precaution
circuit during braking,
may result
in
damage to the
and post
are not rated to
power before
warning
disconnect
labels at all affected devices. Failure to observe this
and /or
inter
opening
bodily injury
rupt DC
current.
any load side
Replace any load side safety
voltage
rating or greater. As an
disconnect switches
in
the
Page 20

Motortronics
Page 19
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
4.2.2 Load Power Connections
Connect the motor leads to the output terminals T1 and T2 provided on the unit. The unit will operate on either a
Wye or a Delta connected motor. An additional control wire must be run from motor lead T3 of the starter to the
voltage sensing circuit of the ABC
Series. The terminal for this is marked "T3". This terminal carries very little
current so #20 wire (or higher) can be used. Fuse protection ad- equate for the field wiring used must be
provided per code.
NOTE: If the ABC Series brake is being used with 2-speed, Wye- Delta or Reduced Voltage starter,
factory
for
additional
load
connection information.
consult
CAUTION!
Power Factor
used with an
include
Correction Capacitors should
ABC
Series brake. PFC
a separate
isolation
contactor
NOT be
connected
Capacitors should
.
to the load side of the motor starter when
only be
connected
to
the
line side and must
Page 21

Motortronics
Page 20
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
4.3 Control Connections
Control wire should be run in a separate conduit from power lines (twisted, shielded cable should be adequate).
Whenever possible, conduits containing control and power conductors should cross at right angles to each
other. Control connections are made to terminal blocks mounted on the printed circuit boards inside the unit
case. TB1 is on the Logic Board (see page 11) with the terminals for Starter Monitor (Brake Command) and Brake
Disable. TB2 is located on the Power Board, and contains terminals for the Interlock Contacts and Mechanical
Brake Relay.
W
ARNING!
The motor starter must never be operated
damage to the
unit
may
result.
manually
when
the
brake unit is
connected.
Blown fuses and/or
4.3.1 Starter Monitor Input
Provides a brake command signal from the motor starter (refer to section 2.1.3). Connect either the normally
open, or normally closed (user preference) dry auxiliary contact on the motor starter to TB1, terminals 1 and 2 on
the logic board. To utilize a normally closed contact select Jumper X1 (factory default). For normally open contact, move the Jumper to X2. For reversing starters, use 2 N.O. contacts in parallel or 2 N.C. contacts (1 from
each contactor) in series to this input. Circuit voltage potential: 15VDC maximum.
Page 22

Motortronics
Page 21
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
4.3.2 Brake Disable Input
Disables electronic braking functions before, during, or after operation (refer to section 2.2.1). To utilize this
feature, wire a N.O. dry contact to TB1 terminals 3 and 4 on the logic board. The disable feature will activate as
long as the contact is closed, and will resume operation sequence only when the disable command is released
(i.e. the contact is opened). Once the ABC Series has resumed operation, it will evaluate the status of the motor
and re-enter the "JOG" mode if conditions are
correct.
Circuit voltage potential: 15VDC maximum.
Note: The Brake Disable can and
thermal
overload
by
wiring
will prevent the brake from
should
be used to disable the
normally
operating
open
contacts
if a motor
from the
over-
ABC
load trip
Series brake in the event of a motor
overload
relay to these
termi
nals. This
condition occurs.
Page 23

Motortronics
Page 22
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
4.3.3 Interlock Contacts
The ABC Series unit must be interlocked with the motor starter coil circuit to disable the motor starter during the
braking cycle for proper operation (refer to 2.1.3). Two sets of "FORM C" contacts are provided on TB2 on
power board to interlock the motor starter with the brake. Terminals 1, 2, and 3 are the first set and terminals 4,
5, and 6 are the second. Use both sets for reversing starters, each in one of the contactor coil circuits. The
second set may be used as a status indicator in non-reversing starter applications. Never connect the interlock
contacts parallel to the contactor coil or across the power line. Circuit voltage potential: same as starter control
circuit, 240VAC maximum.
W
ARNING!
If this
the unit may be
wiring
is done
voided.
incorrectly
or not at all, severe damage
to
the unit may occur and the
warranty
on
4.3.4 Mechanical Brake Release Relay
The ABC Series brake unit can work in conjunction with a mechanical brake by interfacing with the motor and
allowing for mechanical brake control. The ABC Series brake can be used for stopping, and the mechanical
brake can be used for holding. The Mechanical Brake Release contacts are N.O. relay contacts rated for 5A,
250VAC and are located at terminals 7 and 8 of TB2 on the Power Board (see section 2.3 for additional
operating details).
The unit will detect the motor start command and release the mechanical brake. When the stop command is
given, the ABC
injection braking sequence, then engage the mechanical brake at the end of the braking cycle. If the disable
feature is engaged while in "BRAKING" mode, the ABC Series will automatically set the mechanical brake.
Series
brake unit will continue to keep the mechanical brake released, proceed with the DC
Page 24

Motortronics
Page 23
On
1 2 3 4 5 6 7
Switch Positions
Jog Time
1 2 4 8 16 32 64
Time (sec.)
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
5 Adjustments
5.1 Time Adjustment Procedures
Time settings for "Jog Time" and "Brake Time" are adjusted by use of dip switches on the front mounted Operator
Interface Module. Time settings are in seconds (set in binary code). Each switch denotes a binary digit from1- 7
positions, totalling 127 seconds maximum when all are switched to the "On" position.
Operator Interface
Module
5.2 Jog Time Setting
Factory Setting: 7
The jog time is adjustable from 0-127 seconds and is made using the 7 position dip switch SW2, labeled "Jog
Time". Set the switches according to the jog time required. Setting all the switches to the "Off" position (Jog
Time = 0) will disable this function.
Example:
Setting dip
= 7
seconds
CAUTION!
Damage to the motor,
correct.
normal
the DC
accelerate the load on start (
Setting this
operations.
injection
seconds
switch positions
total jog
brake. The jog time
time.
equipment,
switch
Setting the jog time too
1, 2, and 3 to “ON” = 1+2+4
brake and/or
to less than the
should typically
across-
the-line) plus
long
electrical
factory setting
may result in
approximately
circuit
may
be set to equal
may occur if this
involve
equipment operating without
two
risk to the
the
seconds.
time it takes the motor to
adjustment
equip
ment and affect
the benefit of
is not
Page 25

Motortronics
Page 24
On
1 2 3 4 5 6 7
Switch Positions
Brake Time
1 2 4 8 16 32 64
Time (sec.)
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
5.3 Brake Time Setting
Factory Setting: 7
The brake time is programmable from 1 to 127 seconds. Set the switches marked "Brake Time" to the brake
time required. Typical brake time settings should be 1/2 of the load's coast-to-stop time or less, as necessary.
Each dip switch represents a binary time value. Add the times together for the final brake time setting
Example:
Setting dip
= 7
NOTE: Stop times
accurately
seconds) to insure
seconds
seconds
switch positions
total brake
shorter
sense
that
proper stopping.
time.
the motor has
1, 2, and 3 to
than 4 seconds will not allow
"ON"
stopped.
= 1+2+4
Brake Time must be used to turn the ABC Series off (t-2
enough
time for the Zero Speed Sensing
circuit
to
5.4 Brake Current Setting
Factory Setting: 50% of Unit
It is strongly recommended that you try the factory settings first be- fore making any adjustments. If adjustments
are necessary, a "true" RMS AC clamp-on ammeter should be used to check the current supplied to the motor
while braking. Place the meter on one of the ABC Series' input power lines. Start the motor by energizing the
motor starter contactor. Allow the motor to come up to full speed with the normal load. Engage the brake by deenergizing (stopping) the motor starter contactor. Then, increase the brake current, if necessary, by slowly
adjusting the brake torque potentiometer (P1)(located in the Operation Interface Module) in a clockwise direction.
The braking torque should be adjusted so that the braking time expires at the same time the motor stops. Adjust
the brake current and/or brake time until acceptable. Start and stop the motor several times to verify proper
operation.
W
ARNING!
Never exceed the RMS full load current rating of the motor without first checking with the motor manufacturer for
the maximum allowable amount of DC current that can be supplied to the motor during braking application.
Rating
Page 26

Motortronics
Page 25
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Application Specific Adjustments
These settings are factory preset to provide optimum performance in a wide variety of applications, and should
not be changed unless the user is specifically aware of the risks and consequences (contact factory for details).
Brake On Delay (Switch SW1)
This DIP switch controls the amount of time that the ABC Series brake waits prior to applying DC current to the
motor windings in order to allow the magnetic field to decay. The rate of decay varies with motor frame size, so
this SHOULD NOT BE CHANGED. Changing this setting could result in damage to the ABC Series
components and circuit protective devices. If your application requires a specific delay time, please contact the
factory for assistance.
Zero Speed Sensing Disable (Jumper X3)
If for some reason you need to disable the Zero Speed Sensing, remove this jumper. The ABC Series will then
continue braking for the entire Brake Time setting, even if the motor has already come to a complete stop.
Disconnecting the sensing lead to the "T3" terminal, will cause a "Wiring Error" fault, and therefore should not be
used as a means of disabling the Zero Speed Sense circuit.
50 Hz
Operation
(Power Board Jumper X1)
Remove this jumper on units ordered as 60 Hz, but required to operate at 50 Hz. Units ordered as 50 Hz will not
have this jumper, so it must be installed for testing on 60 Hz systems.
CAUTION!
Some
be field
include
your
warranty
adjustments
adjusted without specific instructions
: P1
and P2
.
and devices
visible
potentiometers,
on the ABC Series boards are preset at
from
and push
factory
button PB1.
authorized
Tampering or
the
service
altering
factory
personnel.
and
should
These devices
these devices may void
NOT
Page 27

Motortronics
Page 26
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
6 Start-up
6.1 Start-up Check List
• Verify that the supply voltage matches the supply voltage of the ABC Series brake.
• Confirm that the power lines are attached to the input terminals.
• Verify that the output leads are connected to the output terminals.
• Complete the appropriate control and interlock connections.
• Clear the area of people and extra parts before start up.
NOTE: For 50 Hz
operation,
be sure that jumper
X1
on the
Power Board is
6.2 Equipment
The following equipment will be needed for start-up:
• A "true" RMS AC clamp-on ammeter to check braking current.
• A small screw driver to adjust braking torque (if necessary).
• A digital volt meter
• Stop watch or other means of measuring time.
.
removed.
6.3 Setup Sequence
• Start the motor by energizing the motor starter.
• Allow the programmed jog time to expire. (Factory set for 7 sec.)
• De-energize the motor starter to initiate brake mode.
• Monitor the input current to the ABC Series unit on any one of
clamp-on ammeter.
• Adjust the brake current if necessary.
• If the brake times out before the motor stops, increase the value of the brake time switch, or increase the
brake current (Note: Never exceed the RMS rating of the motor without checking with the motor
manufacturer).
• If the Zero Speed Sense option engages and turns off the brake before the programmed brake time
expires, adjust the brake time dip switch for approximately two (2) seconds longer than the actual stop
time.
its
input leads with the "true" RMS AC
6.4 Check Normal Sequence of Operations
Apply power to the system. The "Power On" LED should indicate that the line power is correct. Both the
"Power On" and the "Brake Off" LED should be illuminated.
• Start the motor. The "Jog / Armed" LED should flash once per second to indicate programmed Jog Time.
• Allow the motor to run. The "Jog / Armed" LED should light solid.
• Initiate the motor stop command. The "Brake Off" LED should go out and the "Brake On" LED should
illuminate. The unit should continue braking until the motor comes to a stop or the programmed brake time
expires.
Page 28

Motortronics
Page 27
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
APPENDIX A: Technical Specifications
Voltage Rating: Models rated from 208 – 600 +/- 10%
Line Frequency: Selectable for 50 / 60 Hz + 2Hz
Current Ratings: 50 – 1000A
50, 100, 200, 300, 400, 550, 800, 1000A
Output Capacity: 25% duty cycle at 100% unit rating
Power Circuit: Fu wave bridge, 4 SCRs, designed for use without isolation
contactors.
Transient Protection: RC snubber dv/dt circuit on each SCR device.
Fusing: Approved for use with existing motor starter fusing when unit is
sized for motor FLA. Consult NEC for any other fusing requirements.
Control Circuit: Self-powered directly from line terminals. No separate control
voltage required.
Control Method: Microprocessor unit control sequencing, I/O monitoring and status
annunciation. Braking current is adjustable via true RMS regulated
control using phase angle firing of SCRs.
Operator Adjustments: Brake Time and Jog Time = 7 position binary dip-switch.
Brake Current = potentiometer
Adjustment Ranges: Brake Jog Time = 0 – 127 seconds in 1 sec. increments.
Brake Current = Up to 100% of unit rating.
Inputs: Starter Monitor = Dry input for auxiliary contact from motor starter.
Jumper selectable for N.O. or N.C. contact.
Inputs: Brake Disable = Dry input for N.O. contact to disable braking before
or during operation. Can be wired to the starter thermal overload
N.O. auxiliary contact to prevent braking of overloaded motor.
Jumper selectable for N.O. or N.C. contact.
Motor Power Sensor (T3) = Voltage input used for sensing motor
power presence in sequencing / status circuit and for zero speed
sensing during braking.
Page 29

Motortronics
Page 28
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Outputs: Starter Coil Interlock = Two sets of FORM “C” relay contacts for us
Mechanical brake Release = N.O. relay contact for use in controlling
in interlocking the starter coil and/or other devices to prevent
energizing as the braking power is applied.
electro-mechanical brake as a holding brake. When the ABC Series
is “disabled”, this circuit controls the mechanical brake normally as if
it is the only brake in the system.
Aux. Contact Ratings: 5 Amps, 250 VAC max.
LED Status Indicators: Large LEDs: braking = green; Fault = Red
Small LEDs: Power On, Jog/Armed, Brake Off, Disabled, Over
Temp and Wiring Error.
Operating Design Temperature: 32ºF – 122ºF / 0ºC to 50ºC
Storage Temperature: -4ºF – 176ºF / -20ºC to 80ºC
Ambient Conditions: 5% to 95% relative humidity
0 – 3300ft (1000m) elevation
Approval: UL, cUL Listed
Page 30

Motortronics
Page 29
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
Warranty information
Motortronics warrants its products to be free from defects in material and/or workmanship for a period of one
year from the date of installation, to a maximum of 18 months from the date of shipment as indicated by the
unit's date code. The Company reserves the right to repair or replace any mal- functioning units under warranty
at their option. All warranty repairs must be performed by the Company factory or on site by factory authorized
service firms or personnel approved by the Company.
Solid state controls have different operating characteristics from those of electromechanical equipment. Because
of these differences and the wide variety of applications for solid state controls, each application designer must
verify that the solid state equipment is acceptable for his application. In no event will Motortronics be liable or
responsible for indirect or consequential damages resulting from the use or application of this equipment. The
diagrams and illustrations in this document are included solely for illustrative purposes. Because of the number
of different applications, Motortronics cannot be responsible or liable for actual use based on the examples or
diagrams.
 Loading...
Loading...